
レーダ装置
【課題】距離アンビギュイティなしに目標の測距値を求めることができるとともに、ドップラアンビギュイティなしに低RCS高速移動目標のラジアル速度を推定することができるレーダ装置を得ることを目的とする。
【解決手段】Σ復調器10により復調されたΣ系受信信号から目標を検出して、その目標の測距値を出力する目標検出器14を設け、目標情報推定器15が、Σ復調器10により復調されたΣ系受信信号とΔ復調器12により復調されたΔ系受信信号から目標の測角値θs及びラジアル速度vsを推定するとともに、そのラジアル速度vsを用いて、目標検出器14から出力された目標の測距値を補正する。
【解決手段】Σ復調器10により復調されたΣ系受信信号から目標を検出して、その目標の測距値を出力する目標検出器14を設け、目標情報推定器15が、Σ復調器10により復調されたΣ系受信信号とΔ復調器12により復調されたΔ系受信信号から目標の測角値θs及びラジアル速度vsを推定するとともに、そのラジアル速度vsを用いて、目標検出器14から出力された目標の測距値を補正する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、目標情報(目標測距値、目標測角値、目標ラジアル速度)を推定するレーダ装置に関するものである。
【背景技術】
【0002】
例えば、地上に設置されているレーダ装置、あるいは、艦船搭載型のレーダ装置は、一般的に、LPRF(Low Pulse Repetition Frequency)モードで運用されている。
LPRFモードでは、距離アンビギュイティなしに目標の測距値を求めることができるが、目標のラジアル速度は、PRFに依存するドップラアンビギュイティのため、高精度な推定を行うことが困難である。
【0003】
そこで、目標の追尾処理では、追尾レート毎に、複数の測距値を求めて、その測距値の変化率から目標の速度を推定することがある。
これに対して、より短時間での追尾安定化を達成するために、1回(=1CPI;CPI:Coherent Processing Interval)の観測のみで、目標のラジアル速度を推定することが求められている。
【0004】
LPRFモードにおいて、1回の観測のみで目標のラジアル速度を推定する方法として、FFT(Fast Fourier Transform)法や、ダブルパルス法がある(例えば、特許文献1を参照)。
FFT法は、一定PRFで送受信を実施し、ヒット方向で観測される目標のドップラ周波数をFFTによって求め、そのドップラ周波数を目標のラジアル速度に換算する方法である。
しかし、目標が高速に移動するなどの場合には、実際の目標のドップラ周波数がPRFより高くなり、ヒット方向では、アンダーサンプリングによる折り返しが発生する場合が多い。このため、FFTよって求める目標のドップラ周波数には、ドップラアンビギュイティが含まれることがある。
【0005】
ダブルパルス法は、PRI(Pulse Repetition Interval)内で、2つのパルスの送受信を実施し、それぞれの受信パルスの位相差から目標のラジアル速度を推定する方法である。
ダブルパルスの間隔は、最大対処ラジアル速度より決めるので、ドップラアンビギュイティなしに目標のラジアル速度を推定することができる。ただし、送信アンテナが1つであるため、互いのパルスがオーバーラップしないように、ダブルパルスの間隔を送信パルス幅と比べて長くする必要がある。
このため、ダブルパルス法は、RCS(Radar Cross Section)が大きく、かつ、航空機等と比べて移動速度が遅い降水や雲霧などのラジアル速度の推定を行う気象レーダで用いられる場合がある(例えば、特許文献1を参照)。
【0006】
上記のダブルパルス法を、低RCS高速移動目標への対処が要求されるレーダ装置に適用するためには、高速移動目標対処のためダブルパルスの間隔を気象レーダの場合と比べて狭くすると同時に、低RCS目標対処のため送信パルス幅をより長くする必要がある。
このため、ダブルパルスの間隔が送信パルス幅と比べて短くなる。その結果、2つのパルスをオーバーラップする必要が生じるため、そのまま適用することは困難である。
【0007】
送信パルス幅より短いダブルパルスの間隔を設定する方法として、例えば、送信機で2つのパルスを生成して、所定のダブルパルスの間隔にしたがって送信信号の合成を行いながら、アンテナより送信する方法がある。
ところが、合成信号のエンベローブが、互いのパルスの干渉によって一定とならないため、送信系増幅器を飽和出力レベルで用いる場合には、その増幅器の出力波形が歪んでしまって、受信時のパルス圧縮性能が劣化する可能性がある。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特許第3269441号(段落番号[0034]、図1)
【発明の概要】
【発明が解決しようとする課題】
【0009】
従来のレーダ装置は以上のように構成されているので、FFT法を用いて、目標のラジアル速度を推定する場合、ドップラアンビギュイティが含まれることがある。ダブルパルス法を用いて、目標のラジアル速度を推定する場合、送信パルス幅より短いダブルパルスの間隔を設定することで、低RCS高速移動目標のラジアル速度を推定することができるが、送信系増幅器を飽和出力レベルで用いる場合、その増幅器の出力波形が歪んでしまって、受信時のパルス圧縮性能が劣化してしまうことがあるなどの課題があった。
【0010】
この発明は上記のような課題を解決するためになされたもので、距離アンビギュイティなしに目標の測距値を求めることができるとともに、ドップラアンビギュイティなしに低RCS高速移動目標のラジアル速度を推定することができるレーダ装置を得ることを目的とする。
【課題を解決するための手段】
【0011】
この発明に係るレーダ装置は、搬送波を変調して第1の送信パルスを生成するとともに、第1の送信パルスに遅延が与えられている第2の送信パルスを生成する送信パルス生成手段と、送信パルス生成手段により生成された第1の送信パルスを第1のアンテナから空間に放射させるとともに、送信パルス生成手段により生成された第2の送信パルスを第2のアンテナから空間に放射させるパルス送信手段と、空間に存在する目標に反射されて第1及び第2のアンテナに戻ってくる第1及び第2の送信パルスの反射波を受信する反射波受信手段と、反射波受信手段により受信された反射波の和を求めるΣビーム合成を実施して、その合成結果を示すΣ系合成信号を出力するとともに、反射波受信手段により受信された反射波の差を求めるΔビーム合成を実施して、その合成結果を示すΔ系合成信号を出力するビーム合成手段と、ビーム合成手段から出力されたΣ系合成信号を復調するΣ系合成信号復調手段と、ビーム合成手段から出力されたΔ系合成信号を復調するΔ系合成信号復調手段と、Σ系合成信号復調手段により復調されたΣ系合成信号から目標を検出して、その目標の測距値を出力する目標検出手段とを設け、目標情報推定手段が、Σ系合成信号復調手段により復調されたΣ系合成信号とΔ系合成信号復調手段により復調されたΔ系合成信号から目標の測角値及びラジアル速度を推定するとともに、そのラジアル速度を用いて、目標検出手段から出力された目標の測距値を補正するようにしたものである。
【発明の効果】
【0012】
この発明によれば、搬送波を変調して第1の送信パルスを生成するとともに、第1の送信パルスに遅延が与えられている第2の送信パルスを生成する送信パルス生成手段と、送信パルス生成手段により生成された第1の送信パルスを第1のアンテナから空間に放射させるとともに、送信パルス生成手段により生成された第2の送信パルスを第2のアンテナから空間に放射させるパルス送信手段と、空間に存在する目標に反射されて第1及び第2のアンテナに戻ってくる第1及び第2の送信パルスの反射波を受信する反射波受信手段と、反射波受信手段により受信された反射波の和を求めるΣビーム合成を実施して、その合成結果を示すΣ系合成信号を出力するとともに、反射波受信手段により受信された反射波の差を求めるΔビーム合成を実施して、その合成結果を示すΔ系合成信号を出力するビーム合成手段と、ビーム合成手段から出力されたΣ系合成信号を復調するΣ系合成信号復調手段と、ビーム合成手段から出力されたΔ系合成信号を復調するΔ系合成信号復調手段と、Σ系合成信号復調手段により復調されたΣ系合成信号から目標を検出して、その目標の測距値を出力する目標検出手段とを設け、目標情報推定手段が、Σ系合成信号復調手段により復調されたΣ系合成信号とΔ系合成信号復調手段により復調されたΔ系合成信号から目標の測角値及びラジアル速度を推定するとともに、そのラジアル速度を用いて、目標検出手段から出力された目標の測距値を補正するように構成したので、距離アンビギュイティなしに目標の測距値を求めることができるとともに、ドップラアンビギュイティなしに低RCS高速移動目標のラジアル速度を推定することができる効果がある。
【図面の簡単な説明】
【0013】
【図1】この発明の実施の形態1によるレーダ装置を示す構成図である。
【図2】この発明の実施の形態1によるレーダ装置の目標情報推定器15を示す構成図である。
【図3】この発明の実施の形態2によるレーダ装置を示す構成図である。
【図4】この発明の実施の形態2によるレーダ装置の目標情報推定器16を示す構成図である。
【図5】この発明の実施の形態3によるレーダ装置を示す構成図である。
【図6】この発明の実施の形態4によるレーダ装置を示す構成図である。
【図7】この発明の実施の形態5によるレーダ装置を示す構成図である。
【図8】この発明の実施の形態5によるレーダ装置の目標情報推定器17を示す構成図である。
【図9】この発明の実施の形態6によるレーダ装置の目標情報選択部61を示す構成図である。
【発明を実施するための形態】
【0014】
実施の形態1.
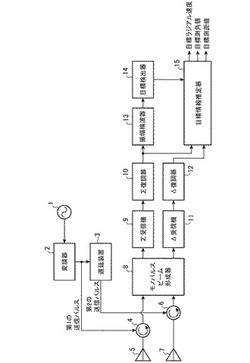
図1はこの発明の実施の形態1によるレーダ装置を示す構成図である。
図1において、搬送波生成器1は所定の送信周波数信号(搬送波)を生成して、その送信周波数信号を変調器2に出力する処理を実施する。
変調器2は所定の変調方式で搬送波生成器1から出力された送信周波数信号を変調して第1の送信パルスを生成し、第1の送信パルスを遅延装置3及びデュプレクサ4に出力する処理を実施する。
遅延装置3は変調器2から出力された第1の送信パルスに遅延を与え、遅延後の第1の送信パルスを第2の送信パルスとしてデュプレクサ6に出力する処理を実施する。
なお、搬送波生成器1、変調器2及び遅延装置3から送信パルス生成手段が構成されている。
【0015】
デュプレクサ4は変調器2から出力された第1の送信パルスをアンテナ5に出力することで、第1の送信パルスを空間に放射させる一方、空間に存在する目標に反射されてアンテナ5に戻ってくる第1及び第2の送信パルスの反射波をモノパルスビーム形成器8に出力する信号経路切換器である。
第1のアンテナであるアンテナ5はデュプレクサ4から出力された第1の送信パルスを空間に放射する一方、空間に存在する目標に反射されて戻ってくる第1及び第2の送信パルスの反射波を受信する。
【0016】
デュプレクサ6は遅延装置3から出力された第2の送信パルスをアンテナ7に出力することで、第2の送信パルスを空間に放射させる一方、空間に存在する目標に反射されてアンテナ7に戻ってくる第1及び第2の送信パルスの反射波をモノパルスビーム形成器8に出力する信号経路切換器である。
第2のアンテナであるアンテナ7はデュプレクサ6から出力された第2の送信パルスを空間に放射する一方、空間に存在する目標に反射されて戻ってくる第1及び第2の送信パルスの反射波を受信する。
なお、デュプレクサ4,6及びアンテナ5,7からパルス送信手段及び反射波受信手段が構成されている。
【0017】
モノパルスビーム形成器8はデュプレクサ4,6から出力された送信パルスの反射波に対するΣビーム合成を実施して、その合成結果を示すΣ系合成信号をΣ受信機9に出力するとともに、送信パルスの反射波に対するΔビーム合成を実施して、その合成結果を示すΔ系合成信号をΔ受信機11に出力する処理を実施する。なお、モノパルスビーム形成器8はビーム合成手段を構成している。
【0018】
Σ受信機9はモノパルスビーム形成器8から出力されたΣ系合成信号に対する周波数変換処理とA/D変換処理を実施し、変換処理後のΣ系合成信号を復調前Σ系受信信号としてΣ復調器10に出力する処理を実施する。
Σ復調器10は変調器2における送信周波数信号の変調方式に対応する復調方式で、Σ受信機9から出力された復調前Σ系受信信号に対する復調処理を実施して、Σ系受信信号を復調する。
なお、Σ受信機9及びΣ復調器10からΣ系合成信号復調手段が構成されている。
【0019】
Δ受信機11はモノパルスビーム形成器8から出力されたΔ系合成信号に対する周波数変換処理とA/D変換処理を実施し、変換処理後のΔ系合成信号を復調前Δ系受信信号としてΔ復調器12に出力する処理を実施する。
Δ復調器12は変調器2における送信周波数信号の変調方式に対応する復調方式で、Δ受信機11から出力された復調前Δ系受信信号に対する復調処理を実施して、Δ系受信信号を復調する。
なお、Δ受信機11及びΔ復調器12からΔ系合成信号復調手段が構成されている。
【0020】
振幅検波器13はΣ復調器10により復調されたΣ系受信信号の振幅を検波し、その検波結果を示す振幅検波後信号を目標検出器14に出力する処理を実施する。
目標検出器14は振幅検波器13から出力された振幅検波後信号に対する目標検出処理(例えば、CFAR(Constant False Alarm Rate)に基づくスレッショルド検定などの処理)を実施することで目標を検出し、その目標の測距値(以下、「補正前目標測距値」と称する)を目標情報推定器15に出力する。
なお、振幅検波器13及び目標検出器14から目標検出手段が構成されている。
【0021】
目標情報推定器15はΣ復調器10により復調されたΣ系受信信号とΔ復調器12により復調されたΔ系受信信号から目標の測角値及びラジアル速度を推定するとともに、そのラジアル速度を用いて、目標検出器14から出力された補正前目標測距値を補正する処理を実施する。なお、目標情報推定器15は目標情報推定手段を構成している。
【0022】
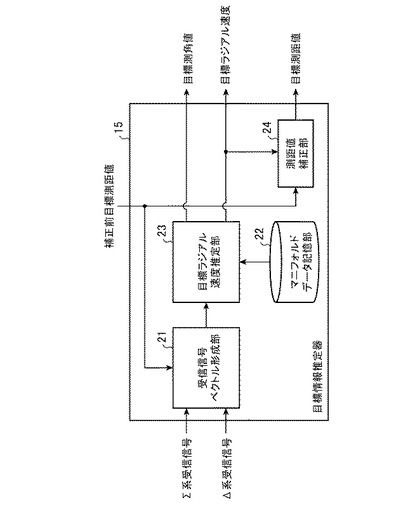
図2はこの発明の実施の形態1によるレーダ装置の目標情報推定器15を示す構成図である。
図2において、受信信号ベクトル形成部21はΣ復調器10により復調されたΣ系受信信号とΔ復調器12により復調されたΔ系受信信号とを並べて、受信信号ベクトルを形成する処理を実施する。なお、受信信号ベクトル形成部21は受信信号ベクトル形成手段を構成している。
【0023】
マニフォルドデータ記憶部22は目標の角度及び速度のマニフォルドデータを記憶しているメモリである。
目標ラジアル速度推定部23は受信信号ベクトル形成部21により形成された受信信号ベクトルとマニフォルドデータ記憶部22に記憶されているマニフォルドデータから、目標の測角値及びラジアル速度を推定する処理を実施する。
なお、マニフォルドデータ記憶部22及び目標ラジアル速度推定部23から測角値・ラジアル速度推定手段が構成されている。
【0024】
測距値補正部24は目標ラジアル速度推定部23により推定されたラジアル速度から、目標検出器14から出力された補正前目標測距値に含まれているバイアス誤差を特定し、その補正前目標測距値から上記バイアス誤差を除く補正処理を実施する。なお、測距値補正部24は測距値補正手段を構成している。
【0025】
次に動作について説明する。
この実施の形態1では、アンテナ5とアンテナ7の間のベースライン上の中点を原点とし、アンテナ5が原点から+Dだけ離れて設置され、アンテナ7が原点から−Dだけ離れて設置されているものとする。
【0026】
まず、搬送波生成器1は、所定の送信周波数信号を生成して、その送信周波数信号を変調器2に出力する。
変調器2は、搬送波生成器1から送信周波数信号を受けると、所定の変調方式(例えば、線形周波数変調を行う方式)で、その送信周波数信号を変調して第1の送信パルスを生成し、第1の送信パルスを遅延装置3及びデュプレクサ4に出力する。
遅延装置3は、変調器2から第1の送信パルスを受けると、その第1の送信パルスに遅延を与え、遅延後の第1の送信パルスを第2の送信パルスとしてデュプレクサ6に出力する。
【0027】
デュプレクサ4は、変調器2から第1の送信パルスを受けると、第1の送信パルスをアンテナ5に出力することで、第1の送信パルスを空間に放射させる。
デュプレクサ6は、遅延装置3から第2の送信パルスを受けると、第2の送信パルスをアンテナ7に出力することで、第2の送信パルスを空間に放射させる。
また、デュプレクサ4は、空間に存在する目標に反射されてアンテナ5に戻ってくる第1及び第2の送信パルスの反射波をモノパルスビーム形成器8に出力する。
また、デュプレクサ6は、空間に存在する目標に反射されてアンテナ7に戻ってくる第1及び第2の送信パルスの反射波をモノパルスビーム形成器8に出力する。
【0028】
モノパルスビーム形成器8は、デュプレクサ4から第1及び第2の送信パルスの反射波を受け、デュプレクサ6から第1及び第2の送信パルスの反射波を受けると、第1及び第2の送信パルスの反射波に対するΣビーム合成を実施して、その合成結果を示すΣ系合成信号をΣ受信機9に出力する。
また、第1及び第2の送信パルスの反射波に対するΔビーム合成を実施して、その合成結果を示すΔ系合成信号をΔ受信機11に出力する。
【0029】
Σ受信機9は、モノパルスビーム形成器8からΣ系合成信号を受けると、そのΣ系合成信号に対する周波数変換処理とA/D変換処理を実施し、変換処理後のΣ系合成信号を復調前Σ系受信信号としてΣ復調器10に出力する。
Σ復調器10は、変調器2における送信周波数信号の変調方式に対応する復調方式で、Σ受信機9から出力された復調前Σ系受信信号に対する復調処理を実施して、Σ系受信信号を復調する。
【0030】
Δ受信機11は、モノパルスビーム形成器8からΔ系合成信号を受けると、そのΔ系合成信号に対する周波数変換処理とA/D変換処理を実施し、変換処理後のΔ系合成信号を復調前Δ系受信信号としてΔ復調器12に出力する。
Δ復調器12は、変調器2における送信周波数信号の変調方式に対応する復調方式で、Δ受信機11から出力された復調前Δ系受信信号に対する復調処理を実施して、Δ系受信信号を復調する。
【0031】
ここまでの処理で、Σ系受信信号とΔ系受信信号が得られるが、以降の説明の準備として、Σ系受信信号とΔ系受信信号の導出について詳述する。ただし、説明の簡単化のため、全てベースバンドとして表わし、復調処理は省略する。
まず、モノパルスビーム形成器8の入力段において、アンテナ5の受信信号x1(m)(t)と、アンテナ7の受信信号x2(m)(t)は、下記の式(1)〜(4)のように与えられる。
ただし、mはアンテナ5,7に対応する番号であり、m=1,2である(m=1はアンテナ5を示し、m=2はアンテナ7を示している)。また、下付添え字が第1及び第2のパルスの番号に対応している。
【0032】

【0033】
式(1)〜(4)において、τ1T(h)は第hヒットにおいて、アンテナ5から目標に至るまでの第1の送信パルスの伝搬時間、τT1(h)は第hヒットにおいて、目標からアンテナ5に至るまでの第1の送信パルスの伝搬時間、τT2(h)は第hヒットにおいて、目標からアンテナ7に至るまでの第1の送信パルスの伝搬時間である。
また、τ2T(h)は第hヒットにおいて、アンテナ7から目標に至るまでの第2の送信パルスの伝搬時間、τ’T1(h)は第hヒットにおいて、目標からアンテナ5に至るまでの第2の送信パルスの伝搬時間、τ’T2(h)は第hヒットにおいて、目標からアンテナ7に至るまでの第2の送信パルスの伝搬時間である。
【0034】
Δtは遅延装置3により与えられる遅延時間であって、第1の送信パルスに対する第2の送信パルスの遅延時間である。
遅延時間Δtにおける目標移動を考慮すれば、τT1(h)≠τ’T1(h)、τT2(h)≠τ’T2(h)となる。
gTx1(θs)はアンテナ5の送信ゲイン、gTx2(θs)はアンテナ7の送信ゲイン、gRx1(θs)はアンテナ5の受信ゲイン、gRx2(θs)はアンテナ7の受信ゲインである。
s(t)はパルスエンベローブ、fは送信周波数、n1(m)(t)はΣ受信機9における受信機雑音、n2(m)(t)はΔ受信機11における受信機雑音、PRIはパルス繰返し周期、φ0は初期位相値である。
【0035】
遅延時間Δtは、下記の式(5)に示すように、対処すべき最大目標ラジアル速度より与えられる。
ただし、vmaxは最大目標ラジアル速度、λは波長である。
【0036】
ここで、時刻tにおける原点と目標との距離R(t)が下記の式(6)で与えられるものとする。
式(6)を用いると、伝搬時間は、下記の式(7)〜(10)のように表わすことができる。
【0037】
よって、式(1)〜(4)は、下記の式(11)〜(14)のように書き直すことができる。
【0038】
以降の議論では、後述する補正前目標測距値により限定できる目標信号を含むサンプルのみを扱う。
したがって、受信信号x1(m)(t),x2(m)(t)については、それぞれ時刻h・PRI+2R(0)/c,h・PRI+Δt+2R(0)/cでサンプルされた目標信号を含む受信信号(ヒット方向にて観測された受信信号)を考える。
【0039】
次に、式(15)〜(18)で表わされる受信信号を要素とする受信信号ベクトルx(h)=[x1(1)(th) x1(2)(th) x2(1)(th+Δt) x2(2)(th+Δt)]Tを下記の式(19)のように定義する。
【0040】
ただし、式(19)の展開では、パルスエンベローブに関する下記の関係を用いている。
【0041】
as(vs,θs)は、下記の式(22)のような目標到来角及び目標ラジアル速度により規定される下記の式(23)のようなステアリングベクトルである。
s0(h)は複素振幅、n(h)は受信機雑音ベクトルである。
【0042】
次に、モノパルスビーム形成器8、Σ受信機9及びΣ復調器10を通過して得られる第1の送信パルスに対応するΣ系受信信号x1(1)(th)+x1(2)(th)、モノパルスビーム形成器8、Δ受信機11及びΔ復調器12を通過して得られる第1の送信パルスに対応するΔ系受信信号x1(1)(th)−x1(2)(th)、モノパルスビーム形成器8、Σ受信機9及びΣ復調器10を通過して得られる第2の送信パルスに対応するΣ系受信信号x1(1)(th+Δt)+x1(2)(th+Δt)、モノパルスビーム形成器8、Δ受信機11及びΔ復調器12を通過して得られる第2の送信パルスに対応するΔ系受信信号x1(1)(th+Δt)−x1(2)(th+Δt)は、下記の式(24)〜(27)のように表わせる。
【0043】
以上により、Σ系受信信号とΔ系受信信号が導出される。
【0044】
振幅検波器13は、Σ復調器10が第1の送信パルスに対応するΣ系受信信号x1(1)(th)+x1(2)(th)と、第2の送信パルスに対応するΣ系受信信号x1(1)(th+Δt)+x1(2)(th+Δt)とを復調すると、それらのΣ系受信信号についてパルス間コヒーレント積分を行った後に振幅検波を実施し、その検波結果を示す振幅検波後信号を目標検出器14に出力する。
なお、振幅検波器13に入力されるΣ系受信信号は、式(24)及び式(26)で表されている目標信号が存在するΣ系受信信号のみならず、目標信号が存在していないΣ系受信信号も含む。
【0045】
目標検出器14は、振幅検波器13から振幅検波後信号を受けると、その振幅検波後信号に対する目標検出処理(例えば、CFARに基づくスレッショルド検定などの処理)を実施することで目標を検出する。
目標検出器14は、目標を検出できた場合、従来と同様の測距処理を実施することで、その目標の測距値を求める。
ただし、その測距値には、目標のラジアル速度に依存するバイアス誤差が含まれていることがあるので、目標検出器14は、その測距値を補正前目標測距値として、目標情報推定器15に出力する。
【0046】
目標情報推定器15は、目標検出器14から補正前目標測距値を受けると、Σ復調器10により復調されたΣ系受信信号とΔ復調器12により復調されたΔ系受信信号から目標の測角値及びラジアル速度を推定するとともに、そのラジアル速度を用いて、その補正前目標測距値を補正する。
以下、目標情報推定器15の処理内容を具体的に説明する。
【0047】
目標情報推定器15の受信信号ベクトル形成部21は、Σ復調器10により復調されたΣ系受信信号とΔ復調器12により復調されたΔ系受信信号とを並べることで、下記の式(28)に示すような受信信号ベクトルxΣΔ(h)を形成する。
式(28)では、xΣΔ(h)の要素番号順に、式(24)〜(27)で表わされる第1の送信パルスに対応するΣ系受信信号、第1の送信パルスに対応するΔ系受信信号、第2の送信パルスに対応するΣ系受信信号、第2の送信パルスに対応するΔ系受信信号が並べられている。
式(28)において、Bはモノパルス合成行列であり、下記の式(29)で表される。また、aΣΔ(vs,θs)はモノパルス合成後のステアリングベクトルであり、下記の式(30)で表される。
【0048】
【0049】
ここで、アンテナ5,7について、ghalf(θ)≡gTx1(θ)=gTx2(θ)=gRx1(θ)=gRx2(θ)が成り立ち、さらに、到来方向をボアサイト方向近傍に限定すると、式(28)の受信信号ベクトルxΣΔ(h)は、下記の式(31)のように与えられる。
【0050】
目標ラジアル速度推定部23は、受信信号ベクトル形成部21が受信信号ベクトルxΣΔ(h)を形成すると、その受信信号ベクトルxΣΔ(h)とマニフォルドデータ記憶部22に記憶されているマニフォルドデータから、式(31)に含まれている未知パラメータである目標の測角値θs及びラジアル速度vsを推定する。
例えば、目標の測角値θs及びラジアル速度vsの推定法として、最尤推定法を用いる場合には、下記の式(34)に示すような2次元サーチに基づき、目標ラジアル速度の推定値vsハット及び目標測角値の推定値θsハットを求めることができる。
式(34)において、vs,θsの上部に表記している「^」の記号は、電子出願の関係上、明細書の文章中には表記できないので、vsハット,θsハットのように表記している。
式(34)において、aΣΔ(v,θ)はaΣΔ(vs,θs)を含む角度・速度マニフォルドデータ、Rxxハットはヒット数Hの受信信号ベクトルxΣΔ(h)より推定される相関行列である。なお、Rxxハットはパルス間コヒーレント積分後の受信信号から形成される受信信号ベクトルを用いてもよい。
【0051】
測距値補正部24は、目標ラジアル速度推定部23がラジアル速度vsを推定すると、そのラジアル速度vsから、目標検出器14から出力された補正前目標測距値に含まれているバイアス誤差を特定する。
このバイアス誤差は、目標ラジアル速度に依存する誤差であり、一般にレンジドップラカップリング誤差と呼ばれるものである。
例えば、変調方式として線形周波数変調を用いている場合、このバイアス誤差と目標ラジアル速度が1次関数の関係にあるので、目標ラジアル速度推定部23により推定されたラジアル速度vsからバイアス誤差を容易に求めることができる。
測距値補正部24は、補正前目標測距値に含まれているバイアス誤差を特定すると、その補正前目標測距値からバイアス誤差を除く補正処理を実施し、補正後の測距値を出力する。
【0052】
以上で明らかなように、この実施の形態1によれば、Σ復調器10により復調されたΣ系受信信号から目標を検出して、その目標の測距値を出力する目標検出器14を設け、目標情報推定器15が、Σ復調器10により復調されたΣ系受信信号とΔ復調器12により復調されたΔ系受信信号から目標の測角値θs及びラジアル速度vsを推定するとともに、そのラジアル速度vsを用いて、目標検出器14から出力された目標の測距値を補正するように構成したので、距離アンビギュイティなしに目標の測距値を求めることができるとともに、ドップラアンビギュイティなしに低RCS高速移動目標のラジアル速度vsを推定することができる効果を奏する。
【0053】
即ち、この実施の形態1によれば、送信アンテナを2分割し、それぞれのアンテナ分割面から2つのパルスの送受信を行うことにより、LPRFモードで運用するレーダにおいて、ドップラアンビギュイティなしに低RCS高速移動目標のラジアル速度を推定することができる効果を奏する。
また、目標ラジアル速度の推定と同時に目標測角値も得られるので、従来の測角処理が不要になる効果がある。
さらに、目標ラジアル速度の推定値を用いて、従来の測距値に対するバイアス誤差補正が可能となり、目標測距精度が向上する効果がある。
【0054】
実施の形態2.
上記実施の形態1では、目標情報推定器15の目標ラジアル速度推定部23が、目標の測角値θsとラジアル速度vsを同時に推定するものを示したが、例えば、推定法として最尤推定法を用いる場合には、式(34)に示すように、2次元サーチが必要になり、その演算負荷が問題になるレーダもある。また、目標の測角値θsの推定については、目標情報推定器15を搭載していないが、目標の測角処理が可能なレーダもある。
そこで、この実施の形態2では、目標の測角値θsの推定はモノパルス測角を用いて行うことで、ラジアル速度vsを推定する際の演算負荷を低減するようにしている。
【0055】
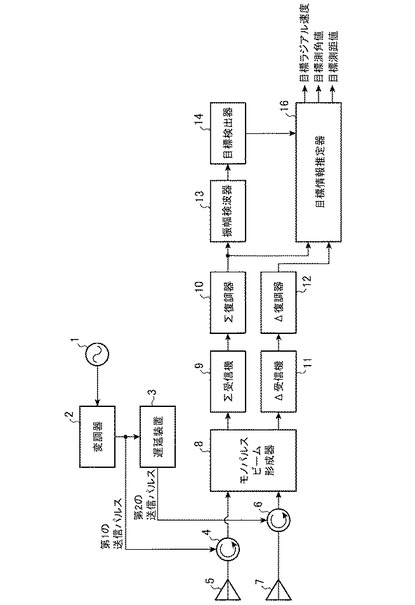
図3はこの発明の実施の形態2によるレーダ装置を示す構成図であり、図において、図1と同一符号は同一または相当部分を示すので説明を省略する。
目標情報推定器16は、図1の目標情報推定器15と同様に、目標の測角値θs及びラジアル速度vsを推定するとともに、目標検出器14から出力された補正前目標測距値を補正する処理を実施するが、測角値θs及びラジアル速度vsの推定処理が、図1の目標情報推定器15と異なっている。なお、目標情報推定器16は目標情報推定手段を構成している。
【0056】
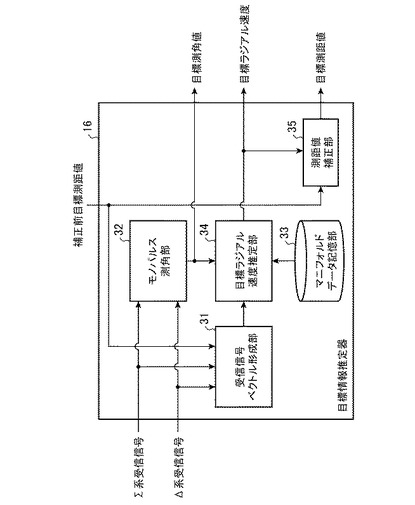
図4はこの発明の実施の形態2によるレーダ装置の目標情報推定器16を示す構成図である。
図4において、受信信号ベクトル形成部31は図2の受信信号ベクトル形成部21と同様に、Σ復調器10により復調されたΣ系受信信号とΔ復調器12により復調されたΔ系受信信号とを並べて、受信信号ベクトルを形成する処理を実施する。なお、受信信号ベクトル形成部31は受信信号ベクトル形成手段を構成している。
モノパルス測角部32はΣ復調器10により復調されたΣ系受信信号とΔ復調器12により復調されたΔ系受信信号から、目標の測角値θsとしてモノパルス測角値を算出する処理を実施する。なお、モノパルス測角部32はモノパルス測角手段を構成している。
【0057】
マニフォルドデータ記憶部33は目標の角度及び速度のマニフォルドデータを記憶しているメモリである。
目標ラジアル速度推定部34は受信信号ベクトル形成部31により形成された受信信号ベクトルとマニフォルドデータ記憶部33に記憶されているマニフォルドデータから、目標のラジアル速度vsを推定する処理を実施する。
なお、マニフォルドデータ記憶部33及び目標ラジアル速度推定部34からラジアル速度推定手段が構成されている。
測距値補正部35は目標ラジアル速度推定部34により推定されたラジアル速度vsから、目標検出器14から出力された補正前目標測距値に含まれているバイアス誤差を特定し、その補正前目標測距値から上記バイアス誤差を除く補正処理を実施する。なお、測距値補正部35は測距値補正手段を構成している。
【0058】
次に動作について説明する。
目標情報推定器16以外は、上記実施の形態1と同様であるため、目標情報推定器16の処理内容だけを説明する。
目標情報推定器16の受信信号ベクトル形成部31は、図2の受信信号ベクトル形成部21と同様に、Σ復調器10により復調されたΣ系受信信号とΔ復調器12により復調されたΔ系受信信号とを並べることで、受信信号ベクトルxΣΔ(h)を形成する。
【0059】
モノパルス測角部32は、Σ復調器10により復調されたΣ系受信信号とΔ復調器12により復調されたΔ系受信信号から、目標の測角値θsとしてモノパルス測角値を算出する。
即ち、モノパルス測角部32は、式(24)で表わされる第1の送信パルスに対応するΣ系受信信号と、式(25)で表わされる第1の送信パルスに対応するΔ系受信信号とからモノパルス比を計算し、そのモノパルス比と予め準備しているモノパルスディスクリ特性を用いて、モノパルス測角値を求める。
また、モノパルス測角部32は、同時に、式(26)で表わされる第2の送信パルスに対応するΣ系受信信号と、式(27)で表わされる第2の送信パルスに対応するΔ系受信信号とからモノパルス比を計算し、そのモノパルス比と予め準備しているモノパルスディスクリ特性を用いて、モノパルス測角値を求める。
モノパルス測角部32は、2つのモノパルス測角値を求めると、2つのモノパルス測角値の平均値、あるいは、いずれか一方のモノパルス測角値を目標の測角値θsとして出力する。
【0060】
目標ラジアル速度推定部34は、受信信号ベクトル形成部31が受信信号ベクトルxΣΔ(h)を形成すると、その受信信号ベクトルxΣΔ(h)とマニフォルドデータ記憶部33に記憶されているマニフォルドデータから、式(31)に含まれている未知パラメータである目標のラジアル速度vsを推定する。
例えば、目標のラジアル速度vsの推定法として、最尤推定法を用いる場合には、下記の式(35)に示すような1次元サーチに基づき、目標ラジアル速度の推定値vsハットを求めることができる。
式(35)において、aΣΔ(v,θsハット)はaΣΔ(vs,θsハット)を含む角度・速度マニフォルドデータ、θsハットはモノパルス測角部32により算出された目標の測角値である。なお、θsハットはパルス間コヒーレント積分後の受信信号から形成される受信信号ベクトルを用いてもよい。
【0061】
以上で明らかなように、この実施の形態2によれば、Σ復調器10により復調されたΣ系受信信号とΔ復調器12により復調されたΔ系受信信号から、目標の測角値θsとしてモノパルス測角値を算出するモノパルス測角部32と、受信信号ベクトル形成部31により形成された受信信号ベクトルとマニフォルドデータ記憶部33に記憶されているマニフォルドデータから、目標のラジアル速度vsを推定する目標ラジアル速度推定部34とを設け、測距値補正部35が、目標ラジアル速度推定部34により推定されたラジアル速度vsから、目標検出器14から出力された補正前目標測距値に含まれているバイアス誤差を特定し、その補正前目標測距値から上記バイアス誤差を除く補正処理を実施するように構成したので、上記実施の形態1と同様に、距離アンビギュイティなしに目標の測距値を求めることができるとともに、ドップラアンビギュイティなしに低RCS高速移動目標のラジアル速度vsを推定することができるほか、ラジアル速度vsを推定する際の演算負荷を軽減することができる効果を奏する。
【0062】
実施の形態3.
上記実施の形態1では、第1の送信パルスと第2の送信パルスが同じ変調方式で変調されて生成されている。このため、振幅検波器13でΔ系受信信号の振幅検波を行うと、1つの目標に対して、遅延時間相当だけ離れている2つのピークが現れる。その結果、目標検出器14が、CFARに基づくスレショルドを設定する際に、CFAR損失が増加する場合がある。
そこで、この実施の形態3では、異なる変調方式で送信周波数信号を変調して第1の送信パルスと第2の送信パルスを生成することで、目標検出器がCFARに基づくスレショルドを設定する際のCFAR損失を軽減するようにしている。
【0063】
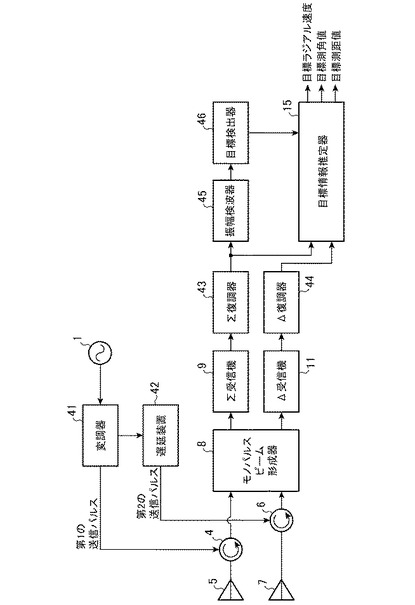
図5はこの発明の実施の形態3によるレーダ装置を示す構成図であり、図において、図1と同一符号は同一または相当部分を示すので説明を省略する。
変調器41は第1の変調方式で搬送波生成器1から出力された送信周波数信号を変調して第1の送信パルスを生成するとともに、第1の変調方式と異なる第2の変調方式で上記送信周波数信号を変調して第2の送信パルスを生成する処理を実施する。
遅延装置42は変調器41により生成された第2の送信パルスに遅延を与え、遅延後の第2の送信パルスをデュプレクサ6に出力する処理を実施する。
なお、搬送波生成器1、変調器41及び遅延装置42から送信パルス生成手段が構成されている。
【0064】
Σ復調器43はΣ受信機9から出力された復調前Σ系受信信号のうち、第1の送信パルスに対応する復調前Σ系受信信号については第1の変調方式に対応する復調方式で復調処理を実施して、その復調処理結果である第1のΣ系受信信号を振幅検波器45及び目標情報推定器15に出力し、第2の送信パルスに対応する復調前Σ系受信信号については第2の変調方式に対応する復調方式で復調処理を実施して、その復調処理結果である第2のΣ系受信信号を振幅検波器45及び目標情報推定器15に出力する処理を実施する。
なお、Σ受信機9及びΣ復調器43からΣ系合成信号復調手段が構成されている。
【0065】
Δ復調器44はΔ受信機11から出力された復調前Δ系受信信号のうち、第1の送信パルスに対応する復調前Δ系受信信号については第1の変調方式に対応する復調方式で復調処理を実施して、その復調処理結果である第1のΔ系受信信号を目標情報推定器15に出力し、第2の送信パルスに対応する復調前Δ系受信信号については第2の変調方式に対応する復調方式で復調処理を実施して、その復調処理結果である第2のΔ系受信信号を目標情報推定器15に出力する処理を実施する。
なお、Δ受信機11及びΔ復調器44からΔ系合成信号復調手段が構成されている。
【0066】
振幅検波器45はΣ復調器43から出力された第1及び第2のΣ系受信信号の振幅を検波し、それぞれの検波結果を示す振幅検波後信号を目標検出器46に出力する処理を実施する。
目標検出器46は振幅検波器45から振幅検波後信号を受ける毎に、その振幅検波後信号に対する目標検出処理(例えば、CFARに基づくスレッショルド検定などの処理)を実施することで目標を検出し、その目標の測距値である補正前目標測距値を目標情報推定器15に出力する。
なお、振幅検波器45及び目標検出器46から目標検出手段が構成されている。
【0067】
次に動作について説明する。
変調器41は、搬送波生成器1から送信周波数信号を受けると、第1の変調方式で送信周波数信号を変調して第1の送信パルスを生成し、第1の送信パルスをデュプレクサ4に出力する。
また、変調器41は、第1の変調方式と異なる第2の変調方式で、その送信周波数信号を変調して第2の送信パルスを生成し、第2の送信パルスを遅延装置42に出力する。
【0068】
遅延装置42は、変調器41から第2の送信パルスを受けると、その第2の送信パルスに遅延を与え、遅延後の第2の送信パルスをデュプレクサ6に出力する。
デュプレクサ4,6、モノパルスビーム形成器8、Σ受信機9及びΔ受信機11の処理内容は、上記実施の形態1と同様であるため説明を省略する。
【0069】
Σ復調器43は、Σ受信機9から出力された復調前Σ系受信信号のうち、第1の送信パルスに対応する復調前Σ系受信信号については第1の変調方式に対応する復調方式で復調処理を実施して、その復調処理結果である第1のΣ系受信信号x1(1)(th)+x1(2)(th)を振幅検波器45及び目標情報推定器15に出力する(上記の式(24)を参照)。
第2の送信パルスに対応する復調前Σ系受信信号については第2の変調方式に対応する復調方式で復調処理を実施して、その復調処理結果である第2のΣ系受信信号x1(1)(th+Δt)+x1(2)(th+Δt)を振幅検波器45及び目標情報推定器15に出力する(上記の式(26)を参照)。
なお、第1のΣ系受信信号x1(1)(th)+x1(2)(th)は、例えば、図示せぬチャンネルAを介して振幅検波器45に出力し、第2のΣ系受信信号x1(1)(th+Δt)+x1(2)(th+Δt)は、図示せぬチャンネルBを介して振幅検波器45に出力する。
【0070】
Δ復調器44は、Δ受信機11から出力された復調前Δ系受信信号のうち、第1の送信パルスに対応する復調前Δ系受信信号については第1の変調方式に対応する復調方式で復調処理を実施して、その復調処理結果である第1のΔ系受信信号x1(1)(th)−x1(2)(th)を目標情報推定器15に出力する(上記の式(25)を参照)。
第2の送信パルスに対応する復調前Δ系受信信号については第2の変調方式に対応する復調方式で復調処理を実施して、その復調処理結果である第2のΔ系受信信号x1(1)(th+Δt)−x1(2)(th+Δt)を目標情報推定器15に出力する(上記の式(27)を参照)。
【0071】
振幅検波器45は、Σ復調器43から第1のΣ系受信信号x1(1)(th)+x1(2)(th)を受けると、第1のΣ系受信信号x1(1)(th)+x1(2)(th)の振幅検波を実施し、その検波結果を示す振幅検波後信号を目標検出器46に出力する。
また、Σ復調器43から第2のΣ系受信信号x1(1)(th+Δt)+x1(2)(th+Δt)を受けると、第2のΣ系受信信号x1(1)(th+Δt)+x1(2)(th+Δt)の振幅検波を実施し、その検波結果を示す振幅検波後信号を目標検出器46に出力する。
【0072】
目標検出器46は、振幅検波器45から振幅検波後信号を受ける毎に、その振幅検波後信号に対する目標検出処理(例えば、CFARに基づくスレッショルド検定などの処理)を実施することで目標を検出し、その目標の測距値である補正前目標測距値を目標情報推定器15に出力する。
目標検出器46は、目標を検出できた場合、従来と同様の測距処理を実施することで、その目標の測距値を求める。
ただし、その測距値には、目標のラジアル速度に依存するバイアス誤差が含まれていることがあるので、目標検出器46は、その測距値を補正前目標測距値として、目標情報推定器15に出力する。
【0073】
目標情報推定器15は、目標検出器46から補正前目標測距値を受けると、上記実施の形態1と同様に、Σ復調器43により復調されたΣ系受信信号とΔ復調器44により復調されたΔ系受信信号から目標の測角値θs及びラジアル速度vsを推定するとともに、そのラジアル速度vsを用いて、その補正前目標測距値を補正する。
【0074】
以上で明らかなように、この実施の形態3によれば、Σ復調器43により復調されたΣ系受信信号から目標を検出して、その目標の測距値を出力する目標検出器46を設け、目標情報推定器15が、Σ復調器43により復調されたΣ系受信信号とΔ復調器44により復調されたΔ系受信信号から目標の測角値θs及びラジアル速度vsを推定するとともに、そのラジアル速度vsを用いて、目標検出器46から出力された目標の測距値を補正するように構成したので、上記実施の形態1と同様に、距離アンビギュイティなしに目標の測距値を求めることができるとともに、ドップラアンビギュイティなしに低RCS高速移動目標のラジアル速度vsを推定することができる効果を奏する。
【0075】
また、この実施の形態3によれば、変調器41が第1の変調方式で送信周波数信号を変調して第1の送信パルスを生成するとともに、第1の変調方式と異なる第2の変調方式で送信周波数信号を変調して第2の送信パルスを生成し、受信側では、第1及び第2の変調方式に対応する2系統を具備するように構成したので、CFARに基づくスレショルドを設定する際のCFAR損失増加を軽減することができる効果を奏する。
【0076】
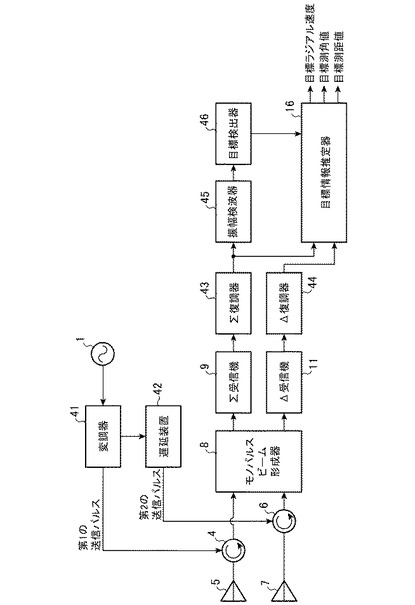
実施の形態4.
上記実施の形態3では、目標情報推定器15の目標ラジアル速度推定部23が、目標の測角値θsとラジアル速度vsを同時に推定するものを示したが、例えば、推定法として最尤推定法を用いる場合には、式(34)に示すように、2次元サーチが必要になり、その演算負荷が問題になるレーダもある。また、目標の測角値θsの推定については、目標情報推定器15を搭載していないが、目標の測角処理が可能なレーダもある。
【0077】
そこで、この実施の形態4では、上記実施の形態2と同様に、目標情報推定器16を実装し(図6を参照)、目標情報推定器16のモノパルス測角部32が、目標の測角値θsの推定をモノパルス測角を用いて行うことで、ラジアル速度vsを推定する際の演算負荷を低減するようにしている。
目標情報推定器15の代わりに、目標情報推定器16を実装している点以外は、上記実施の形態3と同様である。
【0078】
以上で明らかなように、この実施の形態4によれば、Σ復調器43により復調されたΣ系受信信号とΔ復調器44により復調されたΔ系受信信号から、目標の測角値θsとしてモノパルス測角値を算出するモノパルス測角部32と、受信信号ベクトル形成部31により形成された受信信号ベクトルとマニフォルドデータ記憶部33に記憶されているマニフォルドデータから、目標のラジアル速度vsを推定する目標ラジアル速度推定部34とを設け、測距値補正部35が、目標ラジアル速度推定部34により推定されたラジアル速度vsから、目標検出器46から出力された補正前目標測距値に含まれているバイアス誤差を特定し、その補正前目標測距値から上記バイアス誤差を除く補正処理を実施するように構成したので、上記実施の形態3と同様に、距離アンビギュイティなしに目標の測距値を求めることができるとともに、ドップラアンビギュイティなしに低RCS高速移動目標のラジアル速度vsを推定することができるほか、目標の測角値θsとラジアル速度vsを推定する際の演算負荷を軽減することができる効果を奏する。
【0079】
また、この実施の形態4によれば、変調器41が第1の変調方式で送信周波数信号を変調して第1の送信パルスを生成するとともに、第1の変調方式と異なる第2の変調方式で送信周波数信号を変調して第2の送信パルスを生成し、受信側では、第1及び第2の変調方式に対応する2系統を具備するように構成したので、CFARに基づくスレショルドを設定する際のCFAR損失増加を軽減することができる効果を奏する。
【0080】
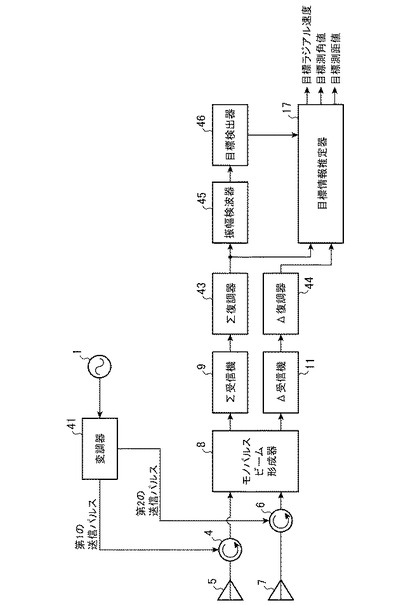
実施の形態5.
上記実施の形態1〜4では、第1の送信パルスと第2の送信パルスの間に遅延時間を設定しているものを示したが、異なる変調方式で送信周波数信号を変調することで、第1及び第2の送信パルスを生成している場合、第1の送信パルスと第2の送信パルスの間に遅延時間を設定していなくても、第1の送信パルスと第2の送信パルスが目標に反射して、アンテナ5,7に戻ってくる時間に相違が生じる。
したがって、第1の送信パルスと第2の送信パルスの間に遅延時間を設定する遅延装置3,42を実装せずに、目標の測距値、測角値及びラジアル速度を推定することが可能である。
この実施の形態5では、遅延装置3,42を実装していないレーダ装置について説明する。
【0081】
図7はこの発明の実施の形態5によるレーダ装置を示す構成図であり、図において、図5と同一符号は同一または相当部分を示すので説明を省略する。
目標情報推定器17はΣ復調器43により復調された第1及び第2のΣ系受信信号とΔ復調器44により復調された第1及び第2のΔ系受信信号から目標の測角値を推定するとともに、目標検出器46から出力された補正前目標測距値から目標のラジアル速度を推定し、そのラジアル速度を用いて、その補正前目標測距値を補正する処理を実施する。なお、目標情報推定器17は目標情報推定手段を構成している。
【0082】
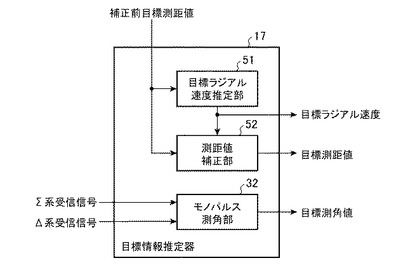
図8はこの発明の実施の形態5によるレーダ装置の目標情報推定器17を示す構成図であり、図において、図4と同一符号は同一または相当部分を示すので説明を省略する。
目標ラジアル速度推定部51は目標検出器46から出力された第1の補正前目標測距値(第1のΣ系受信信号x1(1)(th)+x1(2)(th)の振幅検波後信号から検出された目標の測距値である補正前目標測距値)と、第2の補正前目標測距値(第2のΣ系受信信号x1(1)(th+Δt)+x1(2)(th+Δt)の振幅検波後信号から検出された目標の測距値である補正前目標測距値)との差分ΔRから、目標のラジアル速度を推定する処理を実施する。なお、目標ラジアル速度推定部51はラジアル速度推定手段を構成している。
【0083】
測距値補正部52は目標ラジアル速度推定部51により推定されたラジアル速度から、目標検出器46から出力された補正前目標測距値に含まれているバイアス誤差を特定し、その補正前目標測距値から上記バイアス誤差を除く補正処理を実施する。なお、測距値補正部52は測距値補正手段を構成している。
【0084】
次に動作について説明する。
目標情報推定器17以外は、上記実施の形態3,4と同様であるため、目標情報推定器17の処理内容だけを説明する。
ただし、遅延装置42は実装されていないため、第1の送信パルスと第2の送信パルスは、アンテナ5,7から同時に空間に放射される。
しかし、変調器41において、異なる変調方式で送信周波数信号を変調することで、第1及び第2の送信パルスが生成されているので、第1の送信パルスと第2の送信パルスが目標に反射して、アンテナ5,7に戻ってくる時間はずれている。
【0085】
目標情報推定器17の目標ラジアル速度推定部51は、目標検出器46から出力された第1の補正前目標測距値と、第2の補正前目標測距値との差分ΔRから、目標のラジアル速度vsを推定する。
第1の補正前目標測距値は、第1のΣ系受信信号x1(1)(th)+x1(2)(th)の振幅検波後信号から検出された目標の補正前目標測距値である。
第2の補正前目標測距値は、第2のΣ系受信信号x1(1)(th+Δt)+x1(2)(th+Δt)の振幅検波後信号から検出された目標の補正前目標測距値である。
【0086】
例えば、送信周波数信号が「アップチャープ」と呼ばれる線形周波数変調が施されて第1の送信パルスが生成され、その送信周波数信号が「ダウンチャープ」と呼ばれる線形周波数変調が施されて第2の送信パルスが生成されている場合、目標のラジアル速度の推定値vsハットは、レンジドップラカップリング誤差の関係式を利用して、以下の式(36)に示すように求めることができる。
式(36)において、Bはチャープ帯域幅、τuncompは送信パルス幅である。
他の変調を施す場合でも、目標のラジアル速度vsとレンジドップラカップリング誤差の関係を求めておけば、同様に目標のラジアル速度vsを推定することができる。
【0087】
測距値補正部52は、目標ラジアル速度推定部51がラジアル速度vsを推定すると、そのラジアル速度vsから、目標検出器46から出力された補正前目標測距値に含まれているバイアス誤差を特定する。
このバイアス誤差は、目標ラジアル速度に依存する誤差であり、一般にレンジドップラカップリング誤差と呼ばれるものである。
例えば、変調方式として線形周波数変調を用いている場合、このバイアス誤差と目標ラジアル速度が1次関数の関係にあるので、目標ラジアル速度推定部51により推定されたラジアル速度vsからバイアス誤差を容易に求めることができる。
測距値補正部52は、補正前目標測距値に含まれているバイアス誤差を特定すると、その補正前目標測距値からバイアス誤差を除く補正処理を実施し、補正後の測距値を出力する。
【0088】
以上で明らかなように、この実施の形態5によれば、目標情報推定器17の目標ラジアル速度推定部51が、目標検出器46から出力された第1の補正前目標測距値と、第2の補正前目標測距値との差分ΔRから、目標のラジアル速度vsを推定するように構成したので、遅延装置42を実装することなく、上記実施の形態3,4と同様の効果を奏することができる。
【0089】
実施の形態6.
上記実施の形態1〜4のレーダ装置における目標情報(目標の測距値、測角値、ラジアル速度)の推定精度が、条件によっては、上記実施の形態5のレーダ装置における目標情報(目標の測距値、測角値、ラジアル速度)の推定精度より高くなることがある一方、条件によっては、上記実施の形態5のレーダ装置における目標情報の推定精度より低くなることがある。
そこで、この実施の形態6では、上記実施の形態1〜4のいずれかのレーダ装置の構成と、上記実施の形態5のレーダ装置の構成とを備え、推定精度が高い方のレーダ装置を選択して、そのレーダ装置により推定された目標情報を出力するようにしている。
【0090】
図9はこの発明の実施の形態6によるレーダ装置の目標情報選択部61を示す構成図である。
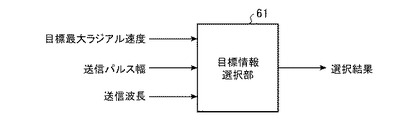
図9において、目標情報選択部61は上記実施の形態1〜4のいずれかのレーダ装置の目標情報推定器15(または16)による目標ラジアル速度vsの推定理論精度σ1と、上記実施の形態5のレーダ装置の目標情報推定器17による目標ラジアル速度vsの推定理論精度σ2とから選択基準値γを算出し、その選択基準値γが1以上であれば、上記実施の形態1〜4のいずれかのレーダ装置の目標情報推定器15(または16)により推定された目標情報を選択して出力し、その選択基準値γが1未満であれば、上記実施の形態5のレーダ装置の目標情報推定器17により推定された目標情報を選択して出力する処理を実施する。なお、目標情報選択部61は選択手段を構成している。
【0091】
次に動作について説明する。
まず、目標情報選択部61は、下記の式(37)に示すように、上記実施の形態1〜4のいずれかのレーダ装置の目標情報推定器15(または16)による目標ラジアル速度vsの推定理論精度σ1と、上記実施の形態5のレーダ装置の目標情報推定器17による目標ラジアル速度vsの推定理論精度σ2とから選択基準値γを算出する。
式(37)において、vmaxは対処すべき目標最大ラジアル速度、λは送信波長、τuncompは送信パルス幅、SNR(Signal to Noise Ratio)は信号に対するノイズの比である。
なお、推定理論精度σ1,σ2は、精度が高い程、小さな値になる。
【0092】
目標情報選択部61は、選択基準値γを算出すると、その選択基準値γが1以上であれば(γ≧1)、上記実施の形態1〜4のいずれかのレーダ装置の目標情報推定器15(または16)により推定された目標情報を選択して出力する。
一方、その選択基準値γが1未満であれば(γ<1)、上記実施の形態5のレーダ装置の目標情報推定器17により推定された目標情報を選択して出力する。
【0093】
以上で明らかなように、この実施の形態6によれば、目標情報選択部61が、上記実施の形態1〜4のいずれかのレーダ装置の目標情報推定器15(または16)による目標ラジアル速度vsの推定理論精度σ1と、上記実施の形態5のレーダ装置の目標情報推定器17による目標ラジアル速度vsの推定理論精度σ2とを比較して、推定理論精度が高い方の目標情報推定器により推定された目標情報を選択するように構成したので、推定精度が安定的に高い目標情報が得られる効果を奏する。
【0094】
なお、本願発明はその発明の範囲内において、各実施の形態の自由な組み合わせ、あるいは各実施の形態の任意の構成要素の変形、もしくは各実施の形態において任意の構成要素の省略が可能である。
【符号の説明】
【0095】
1 搬送波生成器(送信パルス生成手段)、2 変調器(送信パルス生成手段)、3 遅延装置(送信パルス生成手段)、4,6 デュプレクサ(パルス送信手段、反射波受信手段)、5,7 アンテナ(パルス送信手段、反射波受信手段)、8 モノパルスビーム形成器(ビーム合成手段)、9 Σ受信機(Σ系合成信号復調手段)、10 Σ復調器(Σ系合成信号復調手段)、11 Δ受信機(Δ系合成信号復調手段)、12 Δ復調器(Δ系合成信号復調手段)、13 振幅検波器(目標検出手段)、14 目標検出器(目標検出手段)、15,16,17 目標情報推定器(目標情報推定手段)、21 受信信号ベクトル形成部(受信信号ベクトル形成手段)、22 マニフォルドデータ記憶部(測角値・ラジアル速度推定手段)、23 目標ラジアル速度推定部(測角値・ラジアル速度推定手段)、24 測距値補正部(測距値補正手段)、31 受信信号ベクトル形成部(受信信号ベクトル形成手段)、32 モノパルス測角部(モノパルス測角手段)、33 マニフォルドデータ記憶部(ラジアル速度推定手段)、34 目標ラジアル速度推定部(ラジアル速度推定手段)、35 測距値補正部(測距値補正手段)、41 変調器(送信パルス生成手段)、42 遅延装置(送信パルス生成手段)、43 Σ復調器(Σ系合成信号復調手段)、44 Δ復調器(Δ系合成信号復調手段)、45 振幅検波器(目標検出手段)、46 目標検出器(目標検出手段)、51 目標ラジアル速度推定部(ラジアル速度推定手段)、52 測距値補正部(測距値補正手段)、61 目標情報選択部(選択手段)。
【技術分野】
【0001】
この発明は、目標情報(目標測距値、目標測角値、目標ラジアル速度)を推定するレーダ装置に関するものである。
【背景技術】
【0002】
例えば、地上に設置されているレーダ装置、あるいは、艦船搭載型のレーダ装置は、一般的に、LPRF(Low Pulse Repetition Frequency)モードで運用されている。
LPRFモードでは、距離アンビギュイティなしに目標の測距値を求めることができるが、目標のラジアル速度は、PRFに依存するドップラアンビギュイティのため、高精度な推定を行うことが困難である。
【0003】
そこで、目標の追尾処理では、追尾レート毎に、複数の測距値を求めて、その測距値の変化率から目標の速度を推定することがある。
これに対して、より短時間での追尾安定化を達成するために、1回(=1CPI;CPI:Coherent Processing Interval)の観測のみで、目標のラジアル速度を推定することが求められている。
【0004】
LPRFモードにおいて、1回の観測のみで目標のラジアル速度を推定する方法として、FFT(Fast Fourier Transform)法や、ダブルパルス法がある(例えば、特許文献1を参照)。
FFT法は、一定PRFで送受信を実施し、ヒット方向で観測される目標のドップラ周波数をFFTによって求め、そのドップラ周波数を目標のラジアル速度に換算する方法である。
しかし、目標が高速に移動するなどの場合には、実際の目標のドップラ周波数がPRFより高くなり、ヒット方向では、アンダーサンプリングによる折り返しが発生する場合が多い。このため、FFTよって求める目標のドップラ周波数には、ドップラアンビギュイティが含まれることがある。
【0005】
ダブルパルス法は、PRI(Pulse Repetition Interval)内で、2つのパルスの送受信を実施し、それぞれの受信パルスの位相差から目標のラジアル速度を推定する方法である。
ダブルパルスの間隔は、最大対処ラジアル速度より決めるので、ドップラアンビギュイティなしに目標のラジアル速度を推定することができる。ただし、送信アンテナが1つであるため、互いのパルスがオーバーラップしないように、ダブルパルスの間隔を送信パルス幅と比べて長くする必要がある。
このため、ダブルパルス法は、RCS(Radar Cross Section)が大きく、かつ、航空機等と比べて移動速度が遅い降水や雲霧などのラジアル速度の推定を行う気象レーダで用いられる場合がある(例えば、特許文献1を参照)。
【0006】
上記のダブルパルス法を、低RCS高速移動目標への対処が要求されるレーダ装置に適用するためには、高速移動目標対処のためダブルパルスの間隔を気象レーダの場合と比べて狭くすると同時に、低RCS目標対処のため送信パルス幅をより長くする必要がある。
このため、ダブルパルスの間隔が送信パルス幅と比べて短くなる。その結果、2つのパルスをオーバーラップする必要が生じるため、そのまま適用することは困難である。
【0007】
送信パルス幅より短いダブルパルスの間隔を設定する方法として、例えば、送信機で2つのパルスを生成して、所定のダブルパルスの間隔にしたがって送信信号の合成を行いながら、アンテナより送信する方法がある。
ところが、合成信号のエンベローブが、互いのパルスの干渉によって一定とならないため、送信系増幅器を飽和出力レベルで用いる場合には、その増幅器の出力波形が歪んでしまって、受信時のパルス圧縮性能が劣化する可能性がある。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特許第3269441号(段落番号[0034]、図1)
【発明の概要】
【発明が解決しようとする課題】
【0009】
従来のレーダ装置は以上のように構成されているので、FFT法を用いて、目標のラジアル速度を推定する場合、ドップラアンビギュイティが含まれることがある。ダブルパルス法を用いて、目標のラジアル速度を推定する場合、送信パルス幅より短いダブルパルスの間隔を設定することで、低RCS高速移動目標のラジアル速度を推定することができるが、送信系増幅器を飽和出力レベルで用いる場合、その増幅器の出力波形が歪んでしまって、受信時のパルス圧縮性能が劣化してしまうことがあるなどの課題があった。
【0010】
この発明は上記のような課題を解決するためになされたもので、距離アンビギュイティなしに目標の測距値を求めることができるとともに、ドップラアンビギュイティなしに低RCS高速移動目標のラジアル速度を推定することができるレーダ装置を得ることを目的とする。
【課題を解決するための手段】
【0011】
この発明に係るレーダ装置は、搬送波を変調して第1の送信パルスを生成するとともに、第1の送信パルスに遅延が与えられている第2の送信パルスを生成する送信パルス生成手段と、送信パルス生成手段により生成された第1の送信パルスを第1のアンテナから空間に放射させるとともに、送信パルス生成手段により生成された第2の送信パルスを第2のアンテナから空間に放射させるパルス送信手段と、空間に存在する目標に反射されて第1及び第2のアンテナに戻ってくる第1及び第2の送信パルスの反射波を受信する反射波受信手段と、反射波受信手段により受信された反射波の和を求めるΣビーム合成を実施して、その合成結果を示すΣ系合成信号を出力するとともに、反射波受信手段により受信された反射波の差を求めるΔビーム合成を実施して、その合成結果を示すΔ系合成信号を出力するビーム合成手段と、ビーム合成手段から出力されたΣ系合成信号を復調するΣ系合成信号復調手段と、ビーム合成手段から出力されたΔ系合成信号を復調するΔ系合成信号復調手段と、Σ系合成信号復調手段により復調されたΣ系合成信号から目標を検出して、その目標の測距値を出力する目標検出手段とを設け、目標情報推定手段が、Σ系合成信号復調手段により復調されたΣ系合成信号とΔ系合成信号復調手段により復調されたΔ系合成信号から目標の測角値及びラジアル速度を推定するとともに、そのラジアル速度を用いて、目標検出手段から出力された目標の測距値を補正するようにしたものである。
【発明の効果】
【0012】
この発明によれば、搬送波を変調して第1の送信パルスを生成するとともに、第1の送信パルスに遅延が与えられている第2の送信パルスを生成する送信パルス生成手段と、送信パルス生成手段により生成された第1の送信パルスを第1のアンテナから空間に放射させるとともに、送信パルス生成手段により生成された第2の送信パルスを第2のアンテナから空間に放射させるパルス送信手段と、空間に存在する目標に反射されて第1及び第2のアンテナに戻ってくる第1及び第2の送信パルスの反射波を受信する反射波受信手段と、反射波受信手段により受信された反射波の和を求めるΣビーム合成を実施して、その合成結果を示すΣ系合成信号を出力するとともに、反射波受信手段により受信された反射波の差を求めるΔビーム合成を実施して、その合成結果を示すΔ系合成信号を出力するビーム合成手段と、ビーム合成手段から出力されたΣ系合成信号を復調するΣ系合成信号復調手段と、ビーム合成手段から出力されたΔ系合成信号を復調するΔ系合成信号復調手段と、Σ系合成信号復調手段により復調されたΣ系合成信号から目標を検出して、その目標の測距値を出力する目標検出手段とを設け、目標情報推定手段が、Σ系合成信号復調手段により復調されたΣ系合成信号とΔ系合成信号復調手段により復調されたΔ系合成信号から目標の測角値及びラジアル速度を推定するとともに、そのラジアル速度を用いて、目標検出手段から出力された目標の測距値を補正するように構成したので、距離アンビギュイティなしに目標の測距値を求めることができるとともに、ドップラアンビギュイティなしに低RCS高速移動目標のラジアル速度を推定することができる効果がある。
【図面の簡単な説明】
【0013】
【図1】この発明の実施の形態1によるレーダ装置を示す構成図である。
【図2】この発明の実施の形態1によるレーダ装置の目標情報推定器15を示す構成図である。
【図3】この発明の実施の形態2によるレーダ装置を示す構成図である。
【図4】この発明の実施の形態2によるレーダ装置の目標情報推定器16を示す構成図である。
【図5】この発明の実施の形態3によるレーダ装置を示す構成図である。
【図6】この発明の実施の形態4によるレーダ装置を示す構成図である。
【図7】この発明の実施の形態5によるレーダ装置を示す構成図である。
【図8】この発明の実施の形態5によるレーダ装置の目標情報推定器17を示す構成図である。
【図9】この発明の実施の形態6によるレーダ装置の目標情報選択部61を示す構成図である。
【発明を実施するための形態】
【0014】
実施の形態1.
図1はこの発明の実施の形態1によるレーダ装置を示す構成図である。
図1において、搬送波生成器1は所定の送信周波数信号(搬送波)を生成して、その送信周波数信号を変調器2に出力する処理を実施する。
変調器2は所定の変調方式で搬送波生成器1から出力された送信周波数信号を変調して第1の送信パルスを生成し、第1の送信パルスを遅延装置3及びデュプレクサ4に出力する処理を実施する。
遅延装置3は変調器2から出力された第1の送信パルスに遅延を与え、遅延後の第1の送信パルスを第2の送信パルスとしてデュプレクサ6に出力する処理を実施する。
なお、搬送波生成器1、変調器2及び遅延装置3から送信パルス生成手段が構成されている。
【0015】
デュプレクサ4は変調器2から出力された第1の送信パルスをアンテナ5に出力することで、第1の送信パルスを空間に放射させる一方、空間に存在する目標に反射されてアンテナ5に戻ってくる第1及び第2の送信パルスの反射波をモノパルスビーム形成器8に出力する信号経路切換器である。
第1のアンテナであるアンテナ5はデュプレクサ4から出力された第1の送信パルスを空間に放射する一方、空間に存在する目標に反射されて戻ってくる第1及び第2の送信パルスの反射波を受信する。
【0016】
デュプレクサ6は遅延装置3から出力された第2の送信パルスをアンテナ7に出力することで、第2の送信パルスを空間に放射させる一方、空間に存在する目標に反射されてアンテナ7に戻ってくる第1及び第2の送信パルスの反射波をモノパルスビーム形成器8に出力する信号経路切換器である。
第2のアンテナであるアンテナ7はデュプレクサ6から出力された第2の送信パルスを空間に放射する一方、空間に存在する目標に反射されて戻ってくる第1及び第2の送信パルスの反射波を受信する。
なお、デュプレクサ4,6及びアンテナ5,7からパルス送信手段及び反射波受信手段が構成されている。
【0017】
モノパルスビーム形成器8はデュプレクサ4,6から出力された送信パルスの反射波に対するΣビーム合成を実施して、その合成結果を示すΣ系合成信号をΣ受信機9に出力するとともに、送信パルスの反射波に対するΔビーム合成を実施して、その合成結果を示すΔ系合成信号をΔ受信機11に出力する処理を実施する。なお、モノパルスビーム形成器8はビーム合成手段を構成している。
【0018】
Σ受信機9はモノパルスビーム形成器8から出力されたΣ系合成信号に対する周波数変換処理とA/D変換処理を実施し、変換処理後のΣ系合成信号を復調前Σ系受信信号としてΣ復調器10に出力する処理を実施する。
Σ復調器10は変調器2における送信周波数信号の変調方式に対応する復調方式で、Σ受信機9から出力された復調前Σ系受信信号に対する復調処理を実施して、Σ系受信信号を復調する。
なお、Σ受信機9及びΣ復調器10からΣ系合成信号復調手段が構成されている。
【0019】
Δ受信機11はモノパルスビーム形成器8から出力されたΔ系合成信号に対する周波数変換処理とA/D変換処理を実施し、変換処理後のΔ系合成信号を復調前Δ系受信信号としてΔ復調器12に出力する処理を実施する。
Δ復調器12は変調器2における送信周波数信号の変調方式に対応する復調方式で、Δ受信機11から出力された復調前Δ系受信信号に対する復調処理を実施して、Δ系受信信号を復調する。
なお、Δ受信機11及びΔ復調器12からΔ系合成信号復調手段が構成されている。
【0020】
振幅検波器13はΣ復調器10により復調されたΣ系受信信号の振幅を検波し、その検波結果を示す振幅検波後信号を目標検出器14に出力する処理を実施する。
目標検出器14は振幅検波器13から出力された振幅検波後信号に対する目標検出処理(例えば、CFAR(Constant False Alarm Rate)に基づくスレッショルド検定などの処理)を実施することで目標を検出し、その目標の測距値(以下、「補正前目標測距値」と称する)を目標情報推定器15に出力する。
なお、振幅検波器13及び目標検出器14から目標検出手段が構成されている。
【0021】
目標情報推定器15はΣ復調器10により復調されたΣ系受信信号とΔ復調器12により復調されたΔ系受信信号から目標の測角値及びラジアル速度を推定するとともに、そのラジアル速度を用いて、目標検出器14から出力された補正前目標測距値を補正する処理を実施する。なお、目標情報推定器15は目標情報推定手段を構成している。
【0022】
図2はこの発明の実施の形態1によるレーダ装置の目標情報推定器15を示す構成図である。
図2において、受信信号ベクトル形成部21はΣ復調器10により復調されたΣ系受信信号とΔ復調器12により復調されたΔ系受信信号とを並べて、受信信号ベクトルを形成する処理を実施する。なお、受信信号ベクトル形成部21は受信信号ベクトル形成手段を構成している。
【0023】
マニフォルドデータ記憶部22は目標の角度及び速度のマニフォルドデータを記憶しているメモリである。
目標ラジアル速度推定部23は受信信号ベクトル形成部21により形成された受信信号ベクトルとマニフォルドデータ記憶部22に記憶されているマニフォルドデータから、目標の測角値及びラジアル速度を推定する処理を実施する。
なお、マニフォルドデータ記憶部22及び目標ラジアル速度推定部23から測角値・ラジアル速度推定手段が構成されている。
【0024】
測距値補正部24は目標ラジアル速度推定部23により推定されたラジアル速度から、目標検出器14から出力された補正前目標測距値に含まれているバイアス誤差を特定し、その補正前目標測距値から上記バイアス誤差を除く補正処理を実施する。なお、測距値補正部24は測距値補正手段を構成している。
【0025】
次に動作について説明する。
この実施の形態1では、アンテナ5とアンテナ7の間のベースライン上の中点を原点とし、アンテナ5が原点から+Dだけ離れて設置され、アンテナ7が原点から−Dだけ離れて設置されているものとする。
【0026】
まず、搬送波生成器1は、所定の送信周波数信号を生成して、その送信周波数信号を変調器2に出力する。
変調器2は、搬送波生成器1から送信周波数信号を受けると、所定の変調方式(例えば、線形周波数変調を行う方式)で、その送信周波数信号を変調して第1の送信パルスを生成し、第1の送信パルスを遅延装置3及びデュプレクサ4に出力する。
遅延装置3は、変調器2から第1の送信パルスを受けると、その第1の送信パルスに遅延を与え、遅延後の第1の送信パルスを第2の送信パルスとしてデュプレクサ6に出力する。
【0027】
デュプレクサ4は、変調器2から第1の送信パルスを受けると、第1の送信パルスをアンテナ5に出力することで、第1の送信パルスを空間に放射させる。
デュプレクサ6は、遅延装置3から第2の送信パルスを受けると、第2の送信パルスをアンテナ7に出力することで、第2の送信パルスを空間に放射させる。
また、デュプレクサ4は、空間に存在する目標に反射されてアンテナ5に戻ってくる第1及び第2の送信パルスの反射波をモノパルスビーム形成器8に出力する。
また、デュプレクサ6は、空間に存在する目標に反射されてアンテナ7に戻ってくる第1及び第2の送信パルスの反射波をモノパルスビーム形成器8に出力する。
【0028】
モノパルスビーム形成器8は、デュプレクサ4から第1及び第2の送信パルスの反射波を受け、デュプレクサ6から第1及び第2の送信パルスの反射波を受けると、第1及び第2の送信パルスの反射波に対するΣビーム合成を実施して、その合成結果を示すΣ系合成信号をΣ受信機9に出力する。
また、第1及び第2の送信パルスの反射波に対するΔビーム合成を実施して、その合成結果を示すΔ系合成信号をΔ受信機11に出力する。
【0029】
Σ受信機9は、モノパルスビーム形成器8からΣ系合成信号を受けると、そのΣ系合成信号に対する周波数変換処理とA/D変換処理を実施し、変換処理後のΣ系合成信号を復調前Σ系受信信号としてΣ復調器10に出力する。
Σ復調器10は、変調器2における送信周波数信号の変調方式に対応する復調方式で、Σ受信機9から出力された復調前Σ系受信信号に対する復調処理を実施して、Σ系受信信号を復調する。
【0030】
Δ受信機11は、モノパルスビーム形成器8からΔ系合成信号を受けると、そのΔ系合成信号に対する周波数変換処理とA/D変換処理を実施し、変換処理後のΔ系合成信号を復調前Δ系受信信号としてΔ復調器12に出力する。
Δ復調器12は、変調器2における送信周波数信号の変調方式に対応する復調方式で、Δ受信機11から出力された復調前Δ系受信信号に対する復調処理を実施して、Δ系受信信号を復調する。
【0031】
ここまでの処理で、Σ系受信信号とΔ系受信信号が得られるが、以降の説明の準備として、Σ系受信信号とΔ系受信信号の導出について詳述する。ただし、説明の簡単化のため、全てベースバンドとして表わし、復調処理は省略する。
まず、モノパルスビーム形成器8の入力段において、アンテナ5の受信信号x1(m)(t)と、アンテナ7の受信信号x2(m)(t)は、下記の式(1)〜(4)のように与えられる。
ただし、mはアンテナ5,7に対応する番号であり、m=1,2である(m=1はアンテナ5を示し、m=2はアンテナ7を示している)。また、下付添え字が第1及び第2のパルスの番号に対応している。
【0032】
【0033】
式(1)〜(4)において、τ1T(h)は第hヒットにおいて、アンテナ5から目標に至るまでの第1の送信パルスの伝搬時間、τT1(h)は第hヒットにおいて、目標からアンテナ5に至るまでの第1の送信パルスの伝搬時間、τT2(h)は第hヒットにおいて、目標からアンテナ7に至るまでの第1の送信パルスの伝搬時間である。
また、τ2T(h)は第hヒットにおいて、アンテナ7から目標に至るまでの第2の送信パルスの伝搬時間、τ’T1(h)は第hヒットにおいて、目標からアンテナ5に至るまでの第2の送信パルスの伝搬時間、τ’T2(h)は第hヒットにおいて、目標からアンテナ7に至るまでの第2の送信パルスの伝搬時間である。
【0034】
Δtは遅延装置3により与えられる遅延時間であって、第1の送信パルスに対する第2の送信パルスの遅延時間である。
遅延時間Δtにおける目標移動を考慮すれば、τT1(h)≠τ’T1(h)、τT2(h)≠τ’T2(h)となる。
gTx1(θs)はアンテナ5の送信ゲイン、gTx2(θs)はアンテナ7の送信ゲイン、gRx1(θs)はアンテナ5の受信ゲイン、gRx2(θs)はアンテナ7の受信ゲインである。
s(t)はパルスエンベローブ、fは送信周波数、n1(m)(t)はΣ受信機9における受信機雑音、n2(m)(t)はΔ受信機11における受信機雑音、PRIはパルス繰返し周期、φ0は初期位相値である。
【0035】
遅延時間Δtは、下記の式(5)に示すように、対処すべき最大目標ラジアル速度より与えられる。
ただし、vmaxは最大目標ラジアル速度、λは波長である。
【0036】
ここで、時刻tにおける原点と目標との距離R(t)が下記の式(6)で与えられるものとする。
式(6)を用いると、伝搬時間は、下記の式(7)〜(10)のように表わすことができる。
【0037】
よって、式(1)〜(4)は、下記の式(11)〜(14)のように書き直すことができる。
【0038】
以降の議論では、後述する補正前目標測距値により限定できる目標信号を含むサンプルのみを扱う。
したがって、受信信号x1(m)(t),x2(m)(t)については、それぞれ時刻h・PRI+2R(0)/c,h・PRI+Δt+2R(0)/cでサンプルされた目標信号を含む受信信号(ヒット方向にて観測された受信信号)を考える。
【0039】
次に、式(15)〜(18)で表わされる受信信号を要素とする受信信号ベクトルx(h)=[x1(1)(th) x1(2)(th) x2(1)(th+Δt) x2(2)(th+Δt)]Tを下記の式(19)のように定義する。
【0040】
ただし、式(19)の展開では、パルスエンベローブに関する下記の関係を用いている。
【0041】
as(vs,θs)は、下記の式(22)のような目標到来角及び目標ラジアル速度により規定される下記の式(23)のようなステアリングベクトルである。
s0(h)は複素振幅、n(h)は受信機雑音ベクトルである。
【0042】
次に、モノパルスビーム形成器8、Σ受信機9及びΣ復調器10を通過して得られる第1の送信パルスに対応するΣ系受信信号x1(1)(th)+x1(2)(th)、モノパルスビーム形成器8、Δ受信機11及びΔ復調器12を通過して得られる第1の送信パルスに対応するΔ系受信信号x1(1)(th)−x1(2)(th)、モノパルスビーム形成器8、Σ受信機9及びΣ復調器10を通過して得られる第2の送信パルスに対応するΣ系受信信号x1(1)(th+Δt)+x1(2)(th+Δt)、モノパルスビーム形成器8、Δ受信機11及びΔ復調器12を通過して得られる第2の送信パルスに対応するΔ系受信信号x1(1)(th+Δt)−x1(2)(th+Δt)は、下記の式(24)〜(27)のように表わせる。
【0043】
以上により、Σ系受信信号とΔ系受信信号が導出される。
【0044】
振幅検波器13は、Σ復調器10が第1の送信パルスに対応するΣ系受信信号x1(1)(th)+x1(2)(th)と、第2の送信パルスに対応するΣ系受信信号x1(1)(th+Δt)+x1(2)(th+Δt)とを復調すると、それらのΣ系受信信号についてパルス間コヒーレント積分を行った後に振幅検波を実施し、その検波結果を示す振幅検波後信号を目標検出器14に出力する。
なお、振幅検波器13に入力されるΣ系受信信号は、式(24)及び式(26)で表されている目標信号が存在するΣ系受信信号のみならず、目標信号が存在していないΣ系受信信号も含む。
【0045】
目標検出器14は、振幅検波器13から振幅検波後信号を受けると、その振幅検波後信号に対する目標検出処理(例えば、CFARに基づくスレッショルド検定などの処理)を実施することで目標を検出する。
目標検出器14は、目標を検出できた場合、従来と同様の測距処理を実施することで、その目標の測距値を求める。
ただし、その測距値には、目標のラジアル速度に依存するバイアス誤差が含まれていることがあるので、目標検出器14は、その測距値を補正前目標測距値として、目標情報推定器15に出力する。
【0046】
目標情報推定器15は、目標検出器14から補正前目標測距値を受けると、Σ復調器10により復調されたΣ系受信信号とΔ復調器12により復調されたΔ系受信信号から目標の測角値及びラジアル速度を推定するとともに、そのラジアル速度を用いて、その補正前目標測距値を補正する。
以下、目標情報推定器15の処理内容を具体的に説明する。
【0047】
目標情報推定器15の受信信号ベクトル形成部21は、Σ復調器10により復調されたΣ系受信信号とΔ復調器12により復調されたΔ系受信信号とを並べることで、下記の式(28)に示すような受信信号ベクトルxΣΔ(h)を形成する。
式(28)では、xΣΔ(h)の要素番号順に、式(24)〜(27)で表わされる第1の送信パルスに対応するΣ系受信信号、第1の送信パルスに対応するΔ系受信信号、第2の送信パルスに対応するΣ系受信信号、第2の送信パルスに対応するΔ系受信信号が並べられている。
式(28)において、Bはモノパルス合成行列であり、下記の式(29)で表される。また、aΣΔ(vs,θs)はモノパルス合成後のステアリングベクトルであり、下記の式(30)で表される。
【0048】
【0049】
ここで、アンテナ5,7について、ghalf(θ)≡gTx1(θ)=gTx2(θ)=gRx1(θ)=gRx2(θ)が成り立ち、さらに、到来方向をボアサイト方向近傍に限定すると、式(28)の受信信号ベクトルxΣΔ(h)は、下記の式(31)のように与えられる。
【0050】
目標ラジアル速度推定部23は、受信信号ベクトル形成部21が受信信号ベクトルxΣΔ(h)を形成すると、その受信信号ベクトルxΣΔ(h)とマニフォルドデータ記憶部22に記憶されているマニフォルドデータから、式(31)に含まれている未知パラメータである目標の測角値θs及びラジアル速度vsを推定する。
例えば、目標の測角値θs及びラジアル速度vsの推定法として、最尤推定法を用いる場合には、下記の式(34)に示すような2次元サーチに基づき、目標ラジアル速度の推定値vsハット及び目標測角値の推定値θsハットを求めることができる。
式(34)において、vs,θsの上部に表記している「^」の記号は、電子出願の関係上、明細書の文章中には表記できないので、vsハット,θsハットのように表記している。
式(34)において、aΣΔ(v,θ)はaΣΔ(vs,θs)を含む角度・速度マニフォルドデータ、Rxxハットはヒット数Hの受信信号ベクトルxΣΔ(h)より推定される相関行列である。なお、Rxxハットはパルス間コヒーレント積分後の受信信号から形成される受信信号ベクトルを用いてもよい。
【0051】
測距値補正部24は、目標ラジアル速度推定部23がラジアル速度vsを推定すると、そのラジアル速度vsから、目標検出器14から出力された補正前目標測距値に含まれているバイアス誤差を特定する。
このバイアス誤差は、目標ラジアル速度に依存する誤差であり、一般にレンジドップラカップリング誤差と呼ばれるものである。
例えば、変調方式として線形周波数変調を用いている場合、このバイアス誤差と目標ラジアル速度が1次関数の関係にあるので、目標ラジアル速度推定部23により推定されたラジアル速度vsからバイアス誤差を容易に求めることができる。
測距値補正部24は、補正前目標測距値に含まれているバイアス誤差を特定すると、その補正前目標測距値からバイアス誤差を除く補正処理を実施し、補正後の測距値を出力する。
【0052】
以上で明らかなように、この実施の形態1によれば、Σ復調器10により復調されたΣ系受信信号から目標を検出して、その目標の測距値を出力する目標検出器14を設け、目標情報推定器15が、Σ復調器10により復調されたΣ系受信信号とΔ復調器12により復調されたΔ系受信信号から目標の測角値θs及びラジアル速度vsを推定するとともに、そのラジアル速度vsを用いて、目標検出器14から出力された目標の測距値を補正するように構成したので、距離アンビギュイティなしに目標の測距値を求めることができるとともに、ドップラアンビギュイティなしに低RCS高速移動目標のラジアル速度vsを推定することができる効果を奏する。
【0053】
即ち、この実施の形態1によれば、送信アンテナを2分割し、それぞれのアンテナ分割面から2つのパルスの送受信を行うことにより、LPRFモードで運用するレーダにおいて、ドップラアンビギュイティなしに低RCS高速移動目標のラジアル速度を推定することができる効果を奏する。
また、目標ラジアル速度の推定と同時に目標測角値も得られるので、従来の測角処理が不要になる効果がある。
さらに、目標ラジアル速度の推定値を用いて、従来の測距値に対するバイアス誤差補正が可能となり、目標測距精度が向上する効果がある。
【0054】
実施の形態2.
上記実施の形態1では、目標情報推定器15の目標ラジアル速度推定部23が、目標の測角値θsとラジアル速度vsを同時に推定するものを示したが、例えば、推定法として最尤推定法を用いる場合には、式(34)に示すように、2次元サーチが必要になり、その演算負荷が問題になるレーダもある。また、目標の測角値θsの推定については、目標情報推定器15を搭載していないが、目標の測角処理が可能なレーダもある。
そこで、この実施の形態2では、目標の測角値θsの推定はモノパルス測角を用いて行うことで、ラジアル速度vsを推定する際の演算負荷を低減するようにしている。
【0055】
図3はこの発明の実施の形態2によるレーダ装置を示す構成図であり、図において、図1と同一符号は同一または相当部分を示すので説明を省略する。
目標情報推定器16は、図1の目標情報推定器15と同様に、目標の測角値θs及びラジアル速度vsを推定するとともに、目標検出器14から出力された補正前目標測距値を補正する処理を実施するが、測角値θs及びラジアル速度vsの推定処理が、図1の目標情報推定器15と異なっている。なお、目標情報推定器16は目標情報推定手段を構成している。
【0056】
図4はこの発明の実施の形態2によるレーダ装置の目標情報推定器16を示す構成図である。
図4において、受信信号ベクトル形成部31は図2の受信信号ベクトル形成部21と同様に、Σ復調器10により復調されたΣ系受信信号とΔ復調器12により復調されたΔ系受信信号とを並べて、受信信号ベクトルを形成する処理を実施する。なお、受信信号ベクトル形成部31は受信信号ベクトル形成手段を構成している。
モノパルス測角部32はΣ復調器10により復調されたΣ系受信信号とΔ復調器12により復調されたΔ系受信信号から、目標の測角値θsとしてモノパルス測角値を算出する処理を実施する。なお、モノパルス測角部32はモノパルス測角手段を構成している。
【0057】
マニフォルドデータ記憶部33は目標の角度及び速度のマニフォルドデータを記憶しているメモリである。
目標ラジアル速度推定部34は受信信号ベクトル形成部31により形成された受信信号ベクトルとマニフォルドデータ記憶部33に記憶されているマニフォルドデータから、目標のラジアル速度vsを推定する処理を実施する。
なお、マニフォルドデータ記憶部33及び目標ラジアル速度推定部34からラジアル速度推定手段が構成されている。
測距値補正部35は目標ラジアル速度推定部34により推定されたラジアル速度vsから、目標検出器14から出力された補正前目標測距値に含まれているバイアス誤差を特定し、その補正前目標測距値から上記バイアス誤差を除く補正処理を実施する。なお、測距値補正部35は測距値補正手段を構成している。
【0058】
次に動作について説明する。
目標情報推定器16以外は、上記実施の形態1と同様であるため、目標情報推定器16の処理内容だけを説明する。
目標情報推定器16の受信信号ベクトル形成部31は、図2の受信信号ベクトル形成部21と同様に、Σ復調器10により復調されたΣ系受信信号とΔ復調器12により復調されたΔ系受信信号とを並べることで、受信信号ベクトルxΣΔ(h)を形成する。
【0059】
モノパルス測角部32は、Σ復調器10により復調されたΣ系受信信号とΔ復調器12により復調されたΔ系受信信号から、目標の測角値θsとしてモノパルス測角値を算出する。
即ち、モノパルス測角部32は、式(24)で表わされる第1の送信パルスに対応するΣ系受信信号と、式(25)で表わされる第1の送信パルスに対応するΔ系受信信号とからモノパルス比を計算し、そのモノパルス比と予め準備しているモノパルスディスクリ特性を用いて、モノパルス測角値を求める。
また、モノパルス測角部32は、同時に、式(26)で表わされる第2の送信パルスに対応するΣ系受信信号と、式(27)で表わされる第2の送信パルスに対応するΔ系受信信号とからモノパルス比を計算し、そのモノパルス比と予め準備しているモノパルスディスクリ特性を用いて、モノパルス測角値を求める。
モノパルス測角部32は、2つのモノパルス測角値を求めると、2つのモノパルス測角値の平均値、あるいは、いずれか一方のモノパルス測角値を目標の測角値θsとして出力する。
【0060】
目標ラジアル速度推定部34は、受信信号ベクトル形成部31が受信信号ベクトルxΣΔ(h)を形成すると、その受信信号ベクトルxΣΔ(h)とマニフォルドデータ記憶部33に記憶されているマニフォルドデータから、式(31)に含まれている未知パラメータである目標のラジアル速度vsを推定する。
例えば、目標のラジアル速度vsの推定法として、最尤推定法を用いる場合には、下記の式(35)に示すような1次元サーチに基づき、目標ラジアル速度の推定値vsハットを求めることができる。
式(35)において、aΣΔ(v,θsハット)はaΣΔ(vs,θsハット)を含む角度・速度マニフォルドデータ、θsハットはモノパルス測角部32により算出された目標の測角値である。なお、θsハットはパルス間コヒーレント積分後の受信信号から形成される受信信号ベクトルを用いてもよい。
【0061】
以上で明らかなように、この実施の形態2によれば、Σ復調器10により復調されたΣ系受信信号とΔ復調器12により復調されたΔ系受信信号から、目標の測角値θsとしてモノパルス測角値を算出するモノパルス測角部32と、受信信号ベクトル形成部31により形成された受信信号ベクトルとマニフォルドデータ記憶部33に記憶されているマニフォルドデータから、目標のラジアル速度vsを推定する目標ラジアル速度推定部34とを設け、測距値補正部35が、目標ラジアル速度推定部34により推定されたラジアル速度vsから、目標検出器14から出力された補正前目標測距値に含まれているバイアス誤差を特定し、その補正前目標測距値から上記バイアス誤差を除く補正処理を実施するように構成したので、上記実施の形態1と同様に、距離アンビギュイティなしに目標の測距値を求めることができるとともに、ドップラアンビギュイティなしに低RCS高速移動目標のラジアル速度vsを推定することができるほか、ラジアル速度vsを推定する際の演算負荷を軽減することができる効果を奏する。
【0062】
実施の形態3.
上記実施の形態1では、第1の送信パルスと第2の送信パルスが同じ変調方式で変調されて生成されている。このため、振幅検波器13でΔ系受信信号の振幅検波を行うと、1つの目標に対して、遅延時間相当だけ離れている2つのピークが現れる。その結果、目標検出器14が、CFARに基づくスレショルドを設定する際に、CFAR損失が増加する場合がある。
そこで、この実施の形態3では、異なる変調方式で送信周波数信号を変調して第1の送信パルスと第2の送信パルスを生成することで、目標検出器がCFARに基づくスレショルドを設定する際のCFAR損失を軽減するようにしている。
【0063】
図5はこの発明の実施の形態3によるレーダ装置を示す構成図であり、図において、図1と同一符号は同一または相当部分を示すので説明を省略する。
変調器41は第1の変調方式で搬送波生成器1から出力された送信周波数信号を変調して第1の送信パルスを生成するとともに、第1の変調方式と異なる第2の変調方式で上記送信周波数信号を変調して第2の送信パルスを生成する処理を実施する。
遅延装置42は変調器41により生成された第2の送信パルスに遅延を与え、遅延後の第2の送信パルスをデュプレクサ6に出力する処理を実施する。
なお、搬送波生成器1、変調器41及び遅延装置42から送信パルス生成手段が構成されている。
【0064】
Σ復調器43はΣ受信機9から出力された復調前Σ系受信信号のうち、第1の送信パルスに対応する復調前Σ系受信信号については第1の変調方式に対応する復調方式で復調処理を実施して、その復調処理結果である第1のΣ系受信信号を振幅検波器45及び目標情報推定器15に出力し、第2の送信パルスに対応する復調前Σ系受信信号については第2の変調方式に対応する復調方式で復調処理を実施して、その復調処理結果である第2のΣ系受信信号を振幅検波器45及び目標情報推定器15に出力する処理を実施する。
なお、Σ受信機9及びΣ復調器43からΣ系合成信号復調手段が構成されている。
【0065】
Δ復調器44はΔ受信機11から出力された復調前Δ系受信信号のうち、第1の送信パルスに対応する復調前Δ系受信信号については第1の変調方式に対応する復調方式で復調処理を実施して、その復調処理結果である第1のΔ系受信信号を目標情報推定器15に出力し、第2の送信パルスに対応する復調前Δ系受信信号については第2の変調方式に対応する復調方式で復調処理を実施して、その復調処理結果である第2のΔ系受信信号を目標情報推定器15に出力する処理を実施する。
なお、Δ受信機11及びΔ復調器44からΔ系合成信号復調手段が構成されている。
【0066】
振幅検波器45はΣ復調器43から出力された第1及び第2のΣ系受信信号の振幅を検波し、それぞれの検波結果を示す振幅検波後信号を目標検出器46に出力する処理を実施する。
目標検出器46は振幅検波器45から振幅検波後信号を受ける毎に、その振幅検波後信号に対する目標検出処理(例えば、CFARに基づくスレッショルド検定などの処理)を実施することで目標を検出し、その目標の測距値である補正前目標測距値を目標情報推定器15に出力する。
なお、振幅検波器45及び目標検出器46から目標検出手段が構成されている。
【0067】
次に動作について説明する。
変調器41は、搬送波生成器1から送信周波数信号を受けると、第1の変調方式で送信周波数信号を変調して第1の送信パルスを生成し、第1の送信パルスをデュプレクサ4に出力する。
また、変調器41は、第1の変調方式と異なる第2の変調方式で、その送信周波数信号を変調して第2の送信パルスを生成し、第2の送信パルスを遅延装置42に出力する。
【0068】
遅延装置42は、変調器41から第2の送信パルスを受けると、その第2の送信パルスに遅延を与え、遅延後の第2の送信パルスをデュプレクサ6に出力する。
デュプレクサ4,6、モノパルスビーム形成器8、Σ受信機9及びΔ受信機11の処理内容は、上記実施の形態1と同様であるため説明を省略する。
【0069】
Σ復調器43は、Σ受信機9から出力された復調前Σ系受信信号のうち、第1の送信パルスに対応する復調前Σ系受信信号については第1の変調方式に対応する復調方式で復調処理を実施して、その復調処理結果である第1のΣ系受信信号x1(1)(th)+x1(2)(th)を振幅検波器45及び目標情報推定器15に出力する(上記の式(24)を参照)。
第2の送信パルスに対応する復調前Σ系受信信号については第2の変調方式に対応する復調方式で復調処理を実施して、その復調処理結果である第2のΣ系受信信号x1(1)(th+Δt)+x1(2)(th+Δt)を振幅検波器45及び目標情報推定器15に出力する(上記の式(26)を参照)。
なお、第1のΣ系受信信号x1(1)(th)+x1(2)(th)は、例えば、図示せぬチャンネルAを介して振幅検波器45に出力し、第2のΣ系受信信号x1(1)(th+Δt)+x1(2)(th+Δt)は、図示せぬチャンネルBを介して振幅検波器45に出力する。
【0070】
Δ復調器44は、Δ受信機11から出力された復調前Δ系受信信号のうち、第1の送信パルスに対応する復調前Δ系受信信号については第1の変調方式に対応する復調方式で復調処理を実施して、その復調処理結果である第1のΔ系受信信号x1(1)(th)−x1(2)(th)を目標情報推定器15に出力する(上記の式(25)を参照)。
第2の送信パルスに対応する復調前Δ系受信信号については第2の変調方式に対応する復調方式で復調処理を実施して、その復調処理結果である第2のΔ系受信信号x1(1)(th+Δt)−x1(2)(th+Δt)を目標情報推定器15に出力する(上記の式(27)を参照)。
【0071】
振幅検波器45は、Σ復調器43から第1のΣ系受信信号x1(1)(th)+x1(2)(th)を受けると、第1のΣ系受信信号x1(1)(th)+x1(2)(th)の振幅検波を実施し、その検波結果を示す振幅検波後信号を目標検出器46に出力する。
また、Σ復調器43から第2のΣ系受信信号x1(1)(th+Δt)+x1(2)(th+Δt)を受けると、第2のΣ系受信信号x1(1)(th+Δt)+x1(2)(th+Δt)の振幅検波を実施し、その検波結果を示す振幅検波後信号を目標検出器46に出力する。
【0072】
目標検出器46は、振幅検波器45から振幅検波後信号を受ける毎に、その振幅検波後信号に対する目標検出処理(例えば、CFARに基づくスレッショルド検定などの処理)を実施することで目標を検出し、その目標の測距値である補正前目標測距値を目標情報推定器15に出力する。
目標検出器46は、目標を検出できた場合、従来と同様の測距処理を実施することで、その目標の測距値を求める。
ただし、その測距値には、目標のラジアル速度に依存するバイアス誤差が含まれていることがあるので、目標検出器46は、その測距値を補正前目標測距値として、目標情報推定器15に出力する。
【0073】
目標情報推定器15は、目標検出器46から補正前目標測距値を受けると、上記実施の形態1と同様に、Σ復調器43により復調されたΣ系受信信号とΔ復調器44により復調されたΔ系受信信号から目標の測角値θs及びラジアル速度vsを推定するとともに、そのラジアル速度vsを用いて、その補正前目標測距値を補正する。
【0074】
以上で明らかなように、この実施の形態3によれば、Σ復調器43により復調されたΣ系受信信号から目標を検出して、その目標の測距値を出力する目標検出器46を設け、目標情報推定器15が、Σ復調器43により復調されたΣ系受信信号とΔ復調器44により復調されたΔ系受信信号から目標の測角値θs及びラジアル速度vsを推定するとともに、そのラジアル速度vsを用いて、目標検出器46から出力された目標の測距値を補正するように構成したので、上記実施の形態1と同様に、距離アンビギュイティなしに目標の測距値を求めることができるとともに、ドップラアンビギュイティなしに低RCS高速移動目標のラジアル速度vsを推定することができる効果を奏する。
【0075】
また、この実施の形態3によれば、変調器41が第1の変調方式で送信周波数信号を変調して第1の送信パルスを生成するとともに、第1の変調方式と異なる第2の変調方式で送信周波数信号を変調して第2の送信パルスを生成し、受信側では、第1及び第2の変調方式に対応する2系統を具備するように構成したので、CFARに基づくスレショルドを設定する際のCFAR損失増加を軽減することができる効果を奏する。
【0076】
実施の形態4.
上記実施の形態3では、目標情報推定器15の目標ラジアル速度推定部23が、目標の測角値θsとラジアル速度vsを同時に推定するものを示したが、例えば、推定法として最尤推定法を用いる場合には、式(34)に示すように、2次元サーチが必要になり、その演算負荷が問題になるレーダもある。また、目標の測角値θsの推定については、目標情報推定器15を搭載していないが、目標の測角処理が可能なレーダもある。
【0077】
そこで、この実施の形態4では、上記実施の形態2と同様に、目標情報推定器16を実装し(図6を参照)、目標情報推定器16のモノパルス測角部32が、目標の測角値θsの推定をモノパルス測角を用いて行うことで、ラジアル速度vsを推定する際の演算負荷を低減するようにしている。
目標情報推定器15の代わりに、目標情報推定器16を実装している点以外は、上記実施の形態3と同様である。
【0078】
以上で明らかなように、この実施の形態4によれば、Σ復調器43により復調されたΣ系受信信号とΔ復調器44により復調されたΔ系受信信号から、目標の測角値θsとしてモノパルス測角値を算出するモノパルス測角部32と、受信信号ベクトル形成部31により形成された受信信号ベクトルとマニフォルドデータ記憶部33に記憶されているマニフォルドデータから、目標のラジアル速度vsを推定する目標ラジアル速度推定部34とを設け、測距値補正部35が、目標ラジアル速度推定部34により推定されたラジアル速度vsから、目標検出器46から出力された補正前目標測距値に含まれているバイアス誤差を特定し、その補正前目標測距値から上記バイアス誤差を除く補正処理を実施するように構成したので、上記実施の形態3と同様に、距離アンビギュイティなしに目標の測距値を求めることができるとともに、ドップラアンビギュイティなしに低RCS高速移動目標のラジアル速度vsを推定することができるほか、目標の測角値θsとラジアル速度vsを推定する際の演算負荷を軽減することができる効果を奏する。
【0079】
また、この実施の形態4によれば、変調器41が第1の変調方式で送信周波数信号を変調して第1の送信パルスを生成するとともに、第1の変調方式と異なる第2の変調方式で送信周波数信号を変調して第2の送信パルスを生成し、受信側では、第1及び第2の変調方式に対応する2系統を具備するように構成したので、CFARに基づくスレショルドを設定する際のCFAR損失増加を軽減することができる効果を奏する。
【0080】
実施の形態5.
上記実施の形態1〜4では、第1の送信パルスと第2の送信パルスの間に遅延時間を設定しているものを示したが、異なる変調方式で送信周波数信号を変調することで、第1及び第2の送信パルスを生成している場合、第1の送信パルスと第2の送信パルスの間に遅延時間を設定していなくても、第1の送信パルスと第2の送信パルスが目標に反射して、アンテナ5,7に戻ってくる時間に相違が生じる。
したがって、第1の送信パルスと第2の送信パルスの間に遅延時間を設定する遅延装置3,42を実装せずに、目標の測距値、測角値及びラジアル速度を推定することが可能である。
この実施の形態5では、遅延装置3,42を実装していないレーダ装置について説明する。
【0081】
図7はこの発明の実施の形態5によるレーダ装置を示す構成図であり、図において、図5と同一符号は同一または相当部分を示すので説明を省略する。
目標情報推定器17はΣ復調器43により復調された第1及び第2のΣ系受信信号とΔ復調器44により復調された第1及び第2のΔ系受信信号から目標の測角値を推定するとともに、目標検出器46から出力された補正前目標測距値から目標のラジアル速度を推定し、そのラジアル速度を用いて、その補正前目標測距値を補正する処理を実施する。なお、目標情報推定器17は目標情報推定手段を構成している。
【0082】
図8はこの発明の実施の形態5によるレーダ装置の目標情報推定器17を示す構成図であり、図において、図4と同一符号は同一または相当部分を示すので説明を省略する。
目標ラジアル速度推定部51は目標検出器46から出力された第1の補正前目標測距値(第1のΣ系受信信号x1(1)(th)+x1(2)(th)の振幅検波後信号から検出された目標の測距値である補正前目標測距値)と、第2の補正前目標測距値(第2のΣ系受信信号x1(1)(th+Δt)+x1(2)(th+Δt)の振幅検波後信号から検出された目標の測距値である補正前目標測距値)との差分ΔRから、目標のラジアル速度を推定する処理を実施する。なお、目標ラジアル速度推定部51はラジアル速度推定手段を構成している。
【0083】
測距値補正部52は目標ラジアル速度推定部51により推定されたラジアル速度から、目標検出器46から出力された補正前目標測距値に含まれているバイアス誤差を特定し、その補正前目標測距値から上記バイアス誤差を除く補正処理を実施する。なお、測距値補正部52は測距値補正手段を構成している。
【0084】
次に動作について説明する。
目標情報推定器17以外は、上記実施の形態3,4と同様であるため、目標情報推定器17の処理内容だけを説明する。
ただし、遅延装置42は実装されていないため、第1の送信パルスと第2の送信パルスは、アンテナ5,7から同時に空間に放射される。
しかし、変調器41において、異なる変調方式で送信周波数信号を変調することで、第1及び第2の送信パルスが生成されているので、第1の送信パルスと第2の送信パルスが目標に反射して、アンテナ5,7に戻ってくる時間はずれている。
【0085】
目標情報推定器17の目標ラジアル速度推定部51は、目標検出器46から出力された第1の補正前目標測距値と、第2の補正前目標測距値との差分ΔRから、目標のラジアル速度vsを推定する。
第1の補正前目標測距値は、第1のΣ系受信信号x1(1)(th)+x1(2)(th)の振幅検波後信号から検出された目標の補正前目標測距値である。
第2の補正前目標測距値は、第2のΣ系受信信号x1(1)(th+Δt)+x1(2)(th+Δt)の振幅検波後信号から検出された目標の補正前目標測距値である。
【0086】
例えば、送信周波数信号が「アップチャープ」と呼ばれる線形周波数変調が施されて第1の送信パルスが生成され、その送信周波数信号が「ダウンチャープ」と呼ばれる線形周波数変調が施されて第2の送信パルスが生成されている場合、目標のラジアル速度の推定値vsハットは、レンジドップラカップリング誤差の関係式を利用して、以下の式(36)に示すように求めることができる。
式(36)において、Bはチャープ帯域幅、τuncompは送信パルス幅である。
他の変調を施す場合でも、目標のラジアル速度vsとレンジドップラカップリング誤差の関係を求めておけば、同様に目標のラジアル速度vsを推定することができる。
【0087】
測距値補正部52は、目標ラジアル速度推定部51がラジアル速度vsを推定すると、そのラジアル速度vsから、目標検出器46から出力された補正前目標測距値に含まれているバイアス誤差を特定する。
このバイアス誤差は、目標ラジアル速度に依存する誤差であり、一般にレンジドップラカップリング誤差と呼ばれるものである。
例えば、変調方式として線形周波数変調を用いている場合、このバイアス誤差と目標ラジアル速度が1次関数の関係にあるので、目標ラジアル速度推定部51により推定されたラジアル速度vsからバイアス誤差を容易に求めることができる。
測距値補正部52は、補正前目標測距値に含まれているバイアス誤差を特定すると、その補正前目標測距値からバイアス誤差を除く補正処理を実施し、補正後の測距値を出力する。
【0088】
以上で明らかなように、この実施の形態5によれば、目標情報推定器17の目標ラジアル速度推定部51が、目標検出器46から出力された第1の補正前目標測距値と、第2の補正前目標測距値との差分ΔRから、目標のラジアル速度vsを推定するように構成したので、遅延装置42を実装することなく、上記実施の形態3,4と同様の効果を奏することができる。
【0089】
実施の形態6.
上記実施の形態1〜4のレーダ装置における目標情報(目標の測距値、測角値、ラジアル速度)の推定精度が、条件によっては、上記実施の形態5のレーダ装置における目標情報(目標の測距値、測角値、ラジアル速度)の推定精度より高くなることがある一方、条件によっては、上記実施の形態5のレーダ装置における目標情報の推定精度より低くなることがある。
そこで、この実施の形態6では、上記実施の形態1〜4のいずれかのレーダ装置の構成と、上記実施の形態5のレーダ装置の構成とを備え、推定精度が高い方のレーダ装置を選択して、そのレーダ装置により推定された目標情報を出力するようにしている。
【0090】
図9はこの発明の実施の形態6によるレーダ装置の目標情報選択部61を示す構成図である。
図9において、目標情報選択部61は上記実施の形態1〜4のいずれかのレーダ装置の目標情報推定器15(または16)による目標ラジアル速度vsの推定理論精度σ1と、上記実施の形態5のレーダ装置の目標情報推定器17による目標ラジアル速度vsの推定理論精度σ2とから選択基準値γを算出し、その選択基準値γが1以上であれば、上記実施の形態1〜4のいずれかのレーダ装置の目標情報推定器15(または16)により推定された目標情報を選択して出力し、その選択基準値γが1未満であれば、上記実施の形態5のレーダ装置の目標情報推定器17により推定された目標情報を選択して出力する処理を実施する。なお、目標情報選択部61は選択手段を構成している。
【0091】
次に動作について説明する。
まず、目標情報選択部61は、下記の式(37)に示すように、上記実施の形態1〜4のいずれかのレーダ装置の目標情報推定器15(または16)による目標ラジアル速度vsの推定理論精度σ1と、上記実施の形態5のレーダ装置の目標情報推定器17による目標ラジアル速度vsの推定理論精度σ2とから選択基準値γを算出する。
式(37)において、vmaxは対処すべき目標最大ラジアル速度、λは送信波長、τuncompは送信パルス幅、SNR(Signal to Noise Ratio)は信号に対するノイズの比である。
なお、推定理論精度σ1,σ2は、精度が高い程、小さな値になる。
【0092】
目標情報選択部61は、選択基準値γを算出すると、その選択基準値γが1以上であれば(γ≧1)、上記実施の形態1〜4のいずれかのレーダ装置の目標情報推定器15(または16)により推定された目標情報を選択して出力する。
一方、その選択基準値γが1未満であれば(γ<1)、上記実施の形態5のレーダ装置の目標情報推定器17により推定された目標情報を選択して出力する。
【0093】
以上で明らかなように、この実施の形態6によれば、目標情報選択部61が、上記実施の形態1〜4のいずれかのレーダ装置の目標情報推定器15(または16)による目標ラジアル速度vsの推定理論精度σ1と、上記実施の形態5のレーダ装置の目標情報推定器17による目標ラジアル速度vsの推定理論精度σ2とを比較して、推定理論精度が高い方の目標情報推定器により推定された目標情報を選択するように構成したので、推定精度が安定的に高い目標情報が得られる効果を奏する。
【0094】
なお、本願発明はその発明の範囲内において、各実施の形態の自由な組み合わせ、あるいは各実施の形態の任意の構成要素の変形、もしくは各実施の形態において任意の構成要素の省略が可能である。
【符号の説明】
【0095】
1 搬送波生成器(送信パルス生成手段)、2 変調器(送信パルス生成手段)、3 遅延装置(送信パルス生成手段)、4,6 デュプレクサ(パルス送信手段、反射波受信手段)、5,7 アンテナ(パルス送信手段、反射波受信手段)、8 モノパルスビーム形成器(ビーム合成手段)、9 Σ受信機(Σ系合成信号復調手段)、10 Σ復調器(Σ系合成信号復調手段)、11 Δ受信機(Δ系合成信号復調手段)、12 Δ復調器(Δ系合成信号復調手段)、13 振幅検波器(目標検出手段)、14 目標検出器(目標検出手段)、15,16,17 目標情報推定器(目標情報推定手段)、21 受信信号ベクトル形成部(受信信号ベクトル形成手段)、22 マニフォルドデータ記憶部(測角値・ラジアル速度推定手段)、23 目標ラジアル速度推定部(測角値・ラジアル速度推定手段)、24 測距値補正部(測距値補正手段)、31 受信信号ベクトル形成部(受信信号ベクトル形成手段)、32 モノパルス測角部(モノパルス測角手段)、33 マニフォルドデータ記憶部(ラジアル速度推定手段)、34 目標ラジアル速度推定部(ラジアル速度推定手段)、35 測距値補正部(測距値補正手段)、41 変調器(送信パルス生成手段)、42 遅延装置(送信パルス生成手段)、43 Σ復調器(Σ系合成信号復調手段)、44 Δ復調器(Δ系合成信号復調手段)、45 振幅検波器(目標検出手段)、46 目標検出器(目標検出手段)、51 目標ラジアル速度推定部(ラジアル速度推定手段)、52 測距値補正部(測距値補正手段)、61 目標情報選択部(選択手段)。
【特許請求の範囲】
【請求項1】
搬送波を変調して第1の送信パルスを生成するとともに、上記第1の送信パルスに遅延が与えられている第2の送信パルスを生成する送信パルス生成手段と、上記送信パルス生成手段により生成された第1の送信パルスを第1のアンテナから空間に放射させるとともに、上記送信パルス生成手段により生成された第2の送信パルスを第2のアンテナから空間に放射させるパルス送信手段と、上記空間に存在する目標に反射されて第1及び第2のアンテナに戻ってくる第1及び第2の送信パルスの反射波を受信する反射波受信手段と、上記反射波受信手段により受信された反射波の和を求めるΣビーム合成を実施して、その合成結果を示すΣ系合成信号を出力するとともに、上記反射波受信手段により受信された反射波の差を求めるΔビーム合成を実施して、その合成結果を示すΔ系合成信号を出力するビーム合成手段と、上記ビーム合成手段から出力されたΣ系合成信号を復調するΣ系合成信号復調手段と、上記ビーム合成手段から出力されたΔ系合成信号を復調するΔ系合成信号復調手段と、上記Σ系合成信号復調手段により復調されたΣ系合成信号から上記目標を検出して、上記目標の測距値を出力する目標検出手段と、上記Σ系合成信号復調手段により復調されたΣ系合成信号と上記Δ系合成信号復調手段により復調されたΔ系合成信号から上記目標の測角値及びラジアル速度を推定するとともに、上記ラジアル速度を用いて、上記目標検出手段から出力された目標の測距値を補正する目標情報推定手段とを備えたレーダ装置。
【請求項2】
第1の変調方式で搬送波を変調して第1の送信パルスを生成するとともに、上記第1の変調方式と異なる第2の変調方式で上記搬送波を変調して第2の送信パルスを生成し、上記第2の送信パルスに遅延を与える送信パルス生成手段と、上記送信パルス生成手段により生成された第1の送信パルスを第1のアンテナから空間に放射させるとともに、上記送信パルス生成手段により遅延が与えられた第2の送信パルスを第2のアンテナから空間に放射させるパルス送信手段と、上記空間に存在する目標に反射されて第1及び第2のアンテナに戻ってくる第1及び第2の送信パルスの反射波を受信する反射波受信手段と、上記反射波受信手段により受信された反射波の和を求めるΣビーム合成を実施して、その合成結果を示すΣ系合成信号を出力するとともに、上記反射波受信手段により受信された反射波の差を求めるΔビーム合成を実施して、その合成結果を示すΔ系合成信号を出力するビーム合成手段と、第1の変調方式又は第2の変調方式に対応する復調方式で、上記ビーム合成手段から出力されたΣ系合成信号を復調するΣ系合成信号復調手段と、第1の変調方式又は第2の変調方式に対応する復調方式で、上記ビーム合成手段から出力されたΔ系合成信号を復調するΔ系合成信号復調手段と、上記Σ系合成信号復調手段により復調されたΣ系合成信号から上記目標を検出して、上記目標の測距値を出力する目標検出手段と、上記Σ系合成信号復調手段により復調されたΣ系合成信号と上記Δ系合成信号復調手段により復調されたΔ系合成信号から上記目標の測角値及びラジアル速度を推定するとともに、上記ラジアル速度を用いて、上記目標検出手段から出力された目標の測距値を補正する目標情報推定手段とを備えたレーダ装置。
【請求項3】
目標情報推定手段は、Σ系合成信号復調手段により復調されたΣ系合成信号とΔ系合成信号復調手段により復調されたΔ系合成信号とを並べて、受信信号ベクトルを形成する受信信号ベクトル形成手段と、上記受信信号ベクトル形成手段により形成された受信信号ベクトルから目標の測角値及びラジアル速度を推定する測角値・ラジアル速度推定手段と、上記測角値・ラジアル速度推定手段により推定されたラジアル速度から、目標検出手段から出力された目標の測距値に含まれているバイアス誤差を特定し、上記測距値から上記バイアス誤差を除く補正を行う測距値補正手段とから構成されていることを特徴とする請求項1または請求項2記載のレーダ装置。
【請求項4】
目標情報推定手段は、Σ系合成信号復調手段により復調されたΣ系合成信号とΔ系合成信号復調手段により復調されたΔ系合成信号とを並べて、受信信号ベクトルを形成する受信信号ベクトル形成手段と、上記Σ系合成信号及び上記Δ系合成信号から、目標の測角値としてモノパルス測角値を算出するモノパルス測角手段と、上記受信信号ベクトル形成手段により形成された受信信号ベクトルから上記目標のラジアル速度を推定するラジアル速度推定手段と、上記ラジアル速度推定手段により推定されたラジアル速度から、目標検出手段から出力された目標の測距値に含まれているバイアス誤差を特定し、上記測距値から上記バイアス誤差を除く補正を行う測距値補正手段とから構成されていることを特徴とする請求項1または請求項2記載のレーダ装置。
【請求項5】
第1の変調方式で搬送波を変調して第1の送信パルスを生成するとともに、上記第1の変調方式と異なる第2の変調方式で上記搬送波を変調して第2の送信パルスを生成する送信パルス生成手段と、上記送信パルス生成手段により生成された第1の送信パルスを第1のアンテナから空間に放射させるとともに、上記送信パルス生成手段により生成された第2の送信パルスを第2のアンテナから空間に放射させるパルス送信手段と、上記空間に存在する目標に反射されて第1及び第2のアンテナに戻ってくる第1及び第2の送信パルスの反射波を受信する反射波受信手段と、上記反射波受信手段により受信された反射波の和を求めるΣビーム合成を実施して、その合成結果を示すΣ系合成信号を出力するとともに、上記反射波受信手段により受信された反射波の差を求めるΔビーム合成を実施して、その合成結果を示すΔ系合成信号を出力するビーム合成手段と、第1の変調方式又は第2の変調方式に対応する復調方式で、上記ビーム合成手段から出力されたΣ系合成信号を復調するΣ系合成信号復調手段と、第1の変調方式又は第2の変調方式に対応する復調方式で、上記ビーム合成手段から出力されたΔ系合成信号を復調するΔ系合成信号復調手段と、上記Σ系合成信号復調手段により復調されたΣ系合成信号から上記目標を検出して、上記目標の測距値を出力する目標検出手段と、上記Σ系合成信号復調手段により復調されたΣ系合成信号と上記Δ系合成信号復調手段により復調されたΔ系合成信号から上記目標の測角値を推定するとともに、上記目標検出手段から出力された目標の測距値から上記目標のラジアル速度を推定し、上記ラジアル速度を用いて、上記目標の測距値を補正する目標情報推定手段とを備えたレーダ装置。
【請求項6】
目標情報推定手段は、Σ系合成信号復調手段により復調されたΣ系合成信号とΔ系合成信号復調手段により復調されたΔ系合成信号から、目標の測角値としてモノパルス測角値を算出するモノパルス測角手段と、目標検出手段から出力された目標の測距値から上記目標のラジアル速度を推定するラジアル速度推定手段と、上記ラジアル速度推定手段により推定されたラジアル速度から、上記目標の測距値に含まれているバイアス誤差を特定し、上記測距値から上記バイアス誤差を除く補正を行う測距値補正手段とから構成されていることを特徴とする請求項5記載のレーダ装置。
【請求項7】
請求項1または請求項2記載のレーダ装置と、請求項5記載のレーダ装置とから構成されており、
請求項1または請求項2記載のレーダ装置における目標情報推定手段によるラジアル速度の推定理論精度と、請求項5記載のレーダ装置における目標情報推定手段によるラジアル速度の推定理論精度とを比較して、推定理論精度が高い方の目標情報推定手段の処理結果を選択する選択手段を設けたことを特徴とするレーダ装置。
【請求項1】
搬送波を変調して第1の送信パルスを生成するとともに、上記第1の送信パルスに遅延が与えられている第2の送信パルスを生成する送信パルス生成手段と、上記送信パルス生成手段により生成された第1の送信パルスを第1のアンテナから空間に放射させるとともに、上記送信パルス生成手段により生成された第2の送信パルスを第2のアンテナから空間に放射させるパルス送信手段と、上記空間に存在する目標に反射されて第1及び第2のアンテナに戻ってくる第1及び第2の送信パルスの反射波を受信する反射波受信手段と、上記反射波受信手段により受信された反射波の和を求めるΣビーム合成を実施して、その合成結果を示すΣ系合成信号を出力するとともに、上記反射波受信手段により受信された反射波の差を求めるΔビーム合成を実施して、その合成結果を示すΔ系合成信号を出力するビーム合成手段と、上記ビーム合成手段から出力されたΣ系合成信号を復調するΣ系合成信号復調手段と、上記ビーム合成手段から出力されたΔ系合成信号を復調するΔ系合成信号復調手段と、上記Σ系合成信号復調手段により復調されたΣ系合成信号から上記目標を検出して、上記目標の測距値を出力する目標検出手段と、上記Σ系合成信号復調手段により復調されたΣ系合成信号と上記Δ系合成信号復調手段により復調されたΔ系合成信号から上記目標の測角値及びラジアル速度を推定するとともに、上記ラジアル速度を用いて、上記目標検出手段から出力された目標の測距値を補正する目標情報推定手段とを備えたレーダ装置。
【請求項2】
第1の変調方式で搬送波を変調して第1の送信パルスを生成するとともに、上記第1の変調方式と異なる第2の変調方式で上記搬送波を変調して第2の送信パルスを生成し、上記第2の送信パルスに遅延を与える送信パルス生成手段と、上記送信パルス生成手段により生成された第1の送信パルスを第1のアンテナから空間に放射させるとともに、上記送信パルス生成手段により遅延が与えられた第2の送信パルスを第2のアンテナから空間に放射させるパルス送信手段と、上記空間に存在する目標に反射されて第1及び第2のアンテナに戻ってくる第1及び第2の送信パルスの反射波を受信する反射波受信手段と、上記反射波受信手段により受信された反射波の和を求めるΣビーム合成を実施して、その合成結果を示すΣ系合成信号を出力するとともに、上記反射波受信手段により受信された反射波の差を求めるΔビーム合成を実施して、その合成結果を示すΔ系合成信号を出力するビーム合成手段と、第1の変調方式又は第2の変調方式に対応する復調方式で、上記ビーム合成手段から出力されたΣ系合成信号を復調するΣ系合成信号復調手段と、第1の変調方式又は第2の変調方式に対応する復調方式で、上記ビーム合成手段から出力されたΔ系合成信号を復調するΔ系合成信号復調手段と、上記Σ系合成信号復調手段により復調されたΣ系合成信号から上記目標を検出して、上記目標の測距値を出力する目標検出手段と、上記Σ系合成信号復調手段により復調されたΣ系合成信号と上記Δ系合成信号復調手段により復調されたΔ系合成信号から上記目標の測角値及びラジアル速度を推定するとともに、上記ラジアル速度を用いて、上記目標検出手段から出力された目標の測距値を補正する目標情報推定手段とを備えたレーダ装置。
【請求項3】
目標情報推定手段は、Σ系合成信号復調手段により復調されたΣ系合成信号とΔ系合成信号復調手段により復調されたΔ系合成信号とを並べて、受信信号ベクトルを形成する受信信号ベクトル形成手段と、上記受信信号ベクトル形成手段により形成された受信信号ベクトルから目標の測角値及びラジアル速度を推定する測角値・ラジアル速度推定手段と、上記測角値・ラジアル速度推定手段により推定されたラジアル速度から、目標検出手段から出力された目標の測距値に含まれているバイアス誤差を特定し、上記測距値から上記バイアス誤差を除く補正を行う測距値補正手段とから構成されていることを特徴とする請求項1または請求項2記載のレーダ装置。
【請求項4】
目標情報推定手段は、Σ系合成信号復調手段により復調されたΣ系合成信号とΔ系合成信号復調手段により復調されたΔ系合成信号とを並べて、受信信号ベクトルを形成する受信信号ベクトル形成手段と、上記Σ系合成信号及び上記Δ系合成信号から、目標の測角値としてモノパルス測角値を算出するモノパルス測角手段と、上記受信信号ベクトル形成手段により形成された受信信号ベクトルから上記目標のラジアル速度を推定するラジアル速度推定手段と、上記ラジアル速度推定手段により推定されたラジアル速度から、目標検出手段から出力された目標の測距値に含まれているバイアス誤差を特定し、上記測距値から上記バイアス誤差を除く補正を行う測距値補正手段とから構成されていることを特徴とする請求項1または請求項2記載のレーダ装置。
【請求項5】
第1の変調方式で搬送波を変調して第1の送信パルスを生成するとともに、上記第1の変調方式と異なる第2の変調方式で上記搬送波を変調して第2の送信パルスを生成する送信パルス生成手段と、上記送信パルス生成手段により生成された第1の送信パルスを第1のアンテナから空間に放射させるとともに、上記送信パルス生成手段により生成された第2の送信パルスを第2のアンテナから空間に放射させるパルス送信手段と、上記空間に存在する目標に反射されて第1及び第2のアンテナに戻ってくる第1及び第2の送信パルスの反射波を受信する反射波受信手段と、上記反射波受信手段により受信された反射波の和を求めるΣビーム合成を実施して、その合成結果を示すΣ系合成信号を出力するとともに、上記反射波受信手段により受信された反射波の差を求めるΔビーム合成を実施して、その合成結果を示すΔ系合成信号を出力するビーム合成手段と、第1の変調方式又は第2の変調方式に対応する復調方式で、上記ビーム合成手段から出力されたΣ系合成信号を復調するΣ系合成信号復調手段と、第1の変調方式又は第2の変調方式に対応する復調方式で、上記ビーム合成手段から出力されたΔ系合成信号を復調するΔ系合成信号復調手段と、上記Σ系合成信号復調手段により復調されたΣ系合成信号から上記目標を検出して、上記目標の測距値を出力する目標検出手段と、上記Σ系合成信号復調手段により復調されたΣ系合成信号と上記Δ系合成信号復調手段により復調されたΔ系合成信号から上記目標の測角値を推定するとともに、上記目標検出手段から出力された目標の測距値から上記目標のラジアル速度を推定し、上記ラジアル速度を用いて、上記目標の測距値を補正する目標情報推定手段とを備えたレーダ装置。
【請求項6】
目標情報推定手段は、Σ系合成信号復調手段により復調されたΣ系合成信号とΔ系合成信号復調手段により復調されたΔ系合成信号から、目標の測角値としてモノパルス測角値を算出するモノパルス測角手段と、目標検出手段から出力された目標の測距値から上記目標のラジアル速度を推定するラジアル速度推定手段と、上記ラジアル速度推定手段により推定されたラジアル速度から、上記目標の測距値に含まれているバイアス誤差を特定し、上記測距値から上記バイアス誤差を除く補正を行う測距値補正手段とから構成されていることを特徴とする請求項5記載のレーダ装置。
【請求項7】
請求項1または請求項2記載のレーダ装置と、請求項5記載のレーダ装置とから構成されており、
請求項1または請求項2記載のレーダ装置における目標情報推定手段によるラジアル速度の推定理論精度と、請求項5記載のレーダ装置における目標情報推定手段によるラジアル速度の推定理論精度とを比較して、推定理論精度が高い方の目標情報推定手段の処理結果を選択する選択手段を設けたことを特徴とするレーダ装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−233739(P2012−233739A)
【公開日】平成24年11月29日(2012.11.29)
【国際特許分類】
【出願番号】特願2011−101014(P2011−101014)
【出願日】平成23年4月28日(2011.4.28)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成24年11月29日(2012.11.29)
【国際特許分類】
【出願日】平成23年4月28日(2011.4.28)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]