
レーダ装置

【課題】 ステップ周波数をパルス信号帯域よりも大きくした場合においても、曖昧なく距離計測可能なレーダ装置を提供することを目的としている。
【解決手段】 ステップ周波数ずつ周波数が異なる受信パルス信号に基づく合成帯域処理により距離計測を行うレーダ装置であって、前記合成帯域処理が行われる前記受信パルス信号のスペクトルの帯域外の成分を強調する帯域外成分強調フィルタ処理を行うフィルタ処理器と、を備えたものである。
【解決手段】 ステップ周波数ずつ周波数が異なる受信パルス信号に基づく合成帯域処理により距離計測を行うレーダ装置であって、前記合成帯域処理が行われる前記受信パルス信号のスペクトルの帯域外の成分を強調する帯域外成分強調フィルタ処理を行うフィルタ処理器と、を備えたものである。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、合成帯域処理を用いたレーダ装置に関するものである。
【背景技術】
【0002】
従来、レーダの主諸元の1つである距離分解能を向上させる方法の1つとして合成帯域処理が知られている。合成帯域処理は、パルス毎に周波数をステップ状に変化させてパルス信号を送信し、パルス繰り返し周期内の受信信号のダウンコンバートをパルス信号と同じ周波数で行ってビデオ信号を求め、そのビデオ信号を逆フーリエ変換することにより、距離分解能を高分解能化する方法である(例えば、非特許文献1)。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】Donald R.Wehner著, “High-Resolution Radar”, Artech House, Second Edition, Chapter 5, “Synthetic High-Range-Resolution Radar”, 第197頁〜第237頁, September 1994
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、非特許文献1に開示されている合成帯域処理を用いた従来のレーダ装置においては、後述するように、ステップ周波数をパルス信号帯域より大きくすると、曖昧なく距離計測を行うことができないという問題点があった。ひいては、全パルスを送信する時間に制限がある場合、パルス数が制限されることになり、距離分解能が制限されるという問題点もあった。
【0005】
この発明は上記のような課題を解決するためになされたもので、ステップ周波数をパルス信号帯域より大きくした場合においても、曖昧なく距離計測可能なレーダ装置を提供することを目的としている。
【課題を解決するための手段】
【0006】
この発明に係るレーダ装置は、ステップ周波数ずつ周波数が異なる受信パルス信号に基づく合成帯域処理により距離計測を行うレーダ装置であって、前記合成帯域処理が行われる前記受信パルス信号のスペクトルの帯域外の成分を強調する帯域外成分強調フィルタ処理を行うフィルタ処理器と、を備えたものである。
【発明の効果】
【0007】
この発明は、レーダ装置において、ステップ周波数をパルス信号帯域より大きくしても、曖昧なく距離計測可能とすることができる。
【図面の簡単な説明】
【0008】
【図1】この発明の実施の形態1によるレーダ装置を説明するための説明図
【図2】この発明の実施の形態1によるレーダ装置を説明するための説明図
【図3】この発明の実施の形態1によるレーダ装置を説明するための説明図
【図4】この発明の実施の形態1によるレーダ装置を示す構成図
【図5】この発明の実施の形態1によるレーダ装置を説明するための説明図
【図6】この発明の実施の形態1によるレーダ装置を説明するための説明図
【図7】この発明の実施の形態1によるレーダ装置を説明するための説明図
【図8】この発明の実施の形態1によるレーダ装置を説明するための説明図
【図9】この発明の実施の形態2によるレーダ装置を示す構成図
【図10】この発明の実施の形態2によるレーダ装置を説明するための説明図
【図11】この発明の実施の形態2によるレーダ装置を説明するための説明図
【図12】この発明の実施の形態3によるレーダ装置を示す構成図
【図13】この発明の実施の形態3によるレーダ装置を説明するための説明図
【図14】この発明の実施の形態3によるレーダ装置を説明するための説明図
【図15】この発明の実施の形態4によるレーダ装置を示す構成図
【図16】この発明の実施の形態4によるレーダ装置を説明するための説明図
【図17】この発明の実施の形態4によるレーダ装置を示す構成図
【図18】この発明の実施の形態5によるレーダ装置を示す構成図
【図19】この発明の実施の形態6によるレーダ装置を示す構成図
【発明を実施するための形態】
【0009】
実施の形態1.
まず、[発明が解決しようとする課題]欄の記載に関する詳細な説明も含めて、この発明の実施の形態1によるレーダ装置においても用いる合成帯域処理の原理について説明する。光速をc、目標の距離をr、目標信号の振幅を1、パルス数をN、パルス番号をn = 0,1,・・・,N-1とし、送信最小周波数をf0、n番目のパルスの周波数をfn = f0 + nΔfとすると、目標信号が存在するレンジビンにおける受信ビデオ信号は式(1)で表される。
【0010】
【数1】

【0011】
式(1)に逆フーリエ変換を行い、式(2)が得られる。
【0012】
【数2】
【0013】
式(2)が最大値をとるときの整数kをkPとおくと、kPは、式(3)で表される。
【0014】
【数3】
【0015】
よって、目標距離は、式(4)で求めることができる。
【0016】
【数4】
【0017】
さらに、距離分解能は、式(5)で表される。
【0018】
【数5】
【0019】
つまり距離分解能Δrは全送信帯域ΔfNで決定され、ΔfまたはNを大きくするほど、高分解能化が可能となる。また、曖昧なく距離計測可能な範囲は、式(6)となる。
【0020】
【数6】
【0021】
図1に合成帯域処理の原理図を示す。従来のパルスレーダでは、パルス幅をTとした場合、パルス幅Tの間隔で受信信号をサンプリングする。また、パルス信号の信号帯域は、1/Tで表される。そのため、従来のレーダ装置のように、この信号帯域1/Tのまま受信ビデオ信号に帯域合成、すなわち式(2)の逆フーリエ変換を行う場合、曖昧なく距離計測するためには、パルス幅に相当する距離cT/2が、曖昧なく距離計測可能な距離rmax以下であれば良く、図2(a)に示すように、式(7)を満足すれば良い。
【0022】
【数7】
【0023】
このように、従来の合成帯域処理を行うと、曖昧なく距離計測可能な範囲は式(7)で決定されるため、図2(b)に示すように、ステップ周波数Δfがパルス信号帯域1/Tより大きい場合、目標距離と異なる計測距離を求めることになる。すなわち、曖昧なく距離計測可能な範囲を超えると、原点に戻って計測距離を示す、いわゆる距離折り返しが生じ、正しく距離計測ができない欠点を有する。ひいては、図3に示すように、全パルスを送信する時間である全パルス送信時間に制限があるとパルス数Nが制限され、曖昧なく距離計測するためステップ周波数Δfが制限され、すなわちNΔfが制限されることから、式(5)で表される距離分解能が制限されることになる。
【0024】
これに対し、この発明の実施の形態1によるレーダ装置は、帯域外成分強調フィルタ処理としてのウィーナーフィルタ処理を合成帯域処理前に行うフィルタ処理器を設けることにより、ステップ周波数をパルス信号帯域より大きくした場合においても、曖昧なく距離計測可能とするものである。
【0025】
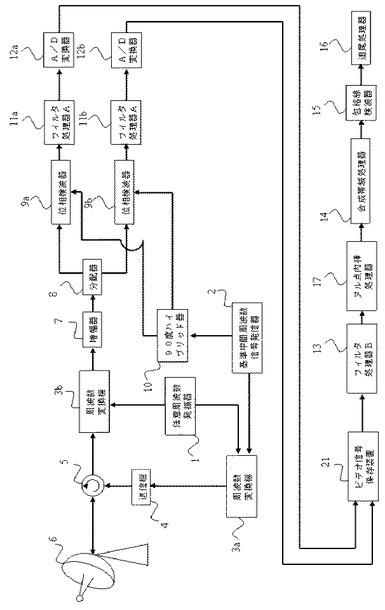
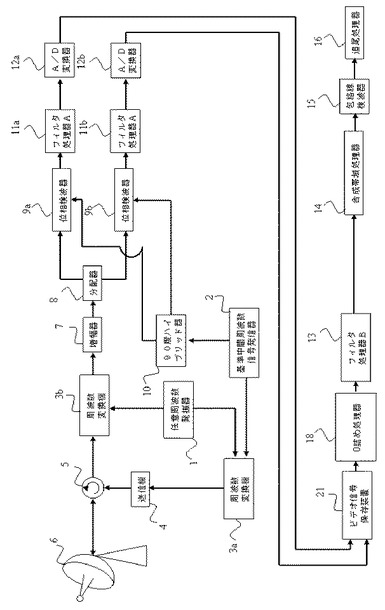
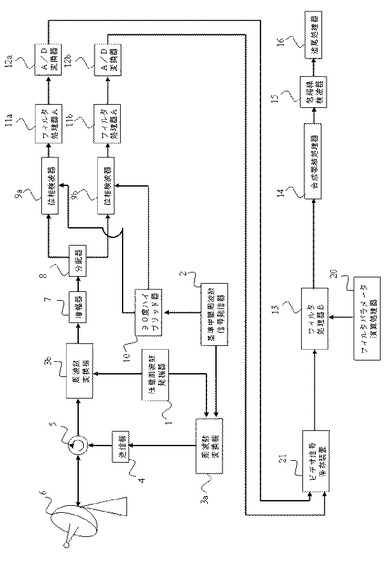
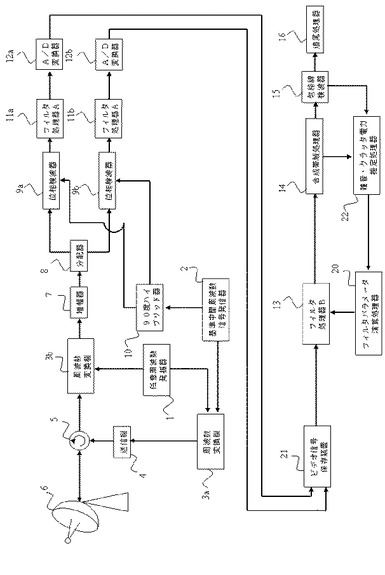
図4は、この発明の実施の形態1によるレーダ装置を示す構成図である。なお、各図において、同一符号は同一または相当部分を示す。図4において、1は任意周波数発振器、2は基準中間周波数信号発振器、3a、3bは周波数変換機、4は送信機、5は送受切替器、6はアンテナ、7は増幅器、8は分配器、9a、9bは位相検波器、10は90度ハイブリッド器、11a、11bはフィルタ処理器A、12a、12bはA/D変換器、13はフィルタ処理器B、14は合成帯域処理器、15は包絡線検波器、16は追尾処理器、21はビデオ信号保存装置である。
【0026】
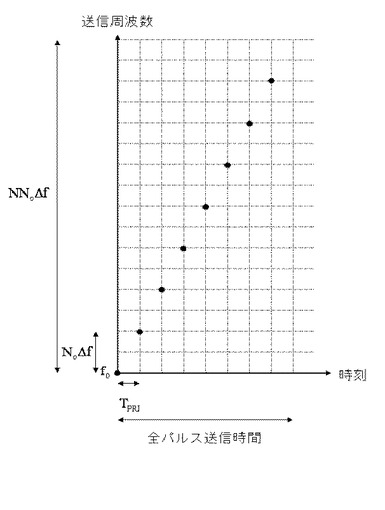
次に動作について説明する。図4において、任意周波数発振器1は、パルス繰り返し周期TPRIを設定するとともに、パルス繰り返し周期TPRI毎に送信周波数が任意の周波数で変化するN個の周波数を繰り返し設定し発振する。但し、パルス繰り返し周期TPRI毎に発振した周波数を低い順から並べた場合、隣接周波数の周波数差は所定の周波数間隔Δfの整数倍、すなわちNo倍となるようにする。ここでは図5に示すようにパルス毎にステップ周波数NoΔfずつ高く設定する。なお、図5はNo=2の場合に相当する。任意周波数発振器1が発振した信号は周波数変換機3a、3bに送られる。
【0027】
基準中間周波数信号発振器2は、基準中間周波数信号を発振し、周波数変換機3aと90度ハイブリッド器10に送る。
【0028】
周波数変換機3aは、任意周波数発振器1で発振された信号の周波数と、基準中間周波数信号発振器2で発振された基準中間周波数信号の周波数との和の周波数の送信キャリア信号を生成し、送信機4に送る。
【0029】
送信機4は、周波数変換機3aからの信号を所定のパルス幅Tにパルス化してパルス信号として生成し、その電力を増幅し、送受切替器5に送る。以後、送信機4で生成される周波数シーケンスを、送信周波数シーケンスと称する。
【0030】
送受切替器5は、送信機4からのパルス信号をアンテナ6に送信した後、送受を切り替える。目標からの反射信号は、アンテナ6で受信された後、周波数変換機3bに送られる。周波数変換機3bは、反射信号を、その周波数と任意周波数発振器1で発振された信号の周波数との差の周波数にIF(Intermediate Frequency)信号として変換し、増幅器7に送る。増幅器7は、周波数変換機3bからのIF信号の電力を増幅し、分配器8に送る。
【0031】
分配器8は、増幅器7からの増幅IF信号を2つの信号に分け、それぞれ位相検波器9a、9bに送る。
【0032】
一方、90度ハイブリッド器10は、基準中間周波数信号発振器2からの基準中間周波数信号を、90度の位相差を持った2つの信号に分離し、位相検波器9a、9bに出力する。位相検波器9a、9bは、分配器8からの入力信号および90度ハイブリッド器10からの入力信号から、IF信号の周波数と基準中間周波数信号の周波数との差の周波数をもち、互いに90度の位相差をもつI成分のビデオ信号、Q成分のビデオ信号(以下、I、Qビデオ信号と称する)を生成する。
【0033】
この生成されたI、Qビデオ信号は、フィルタ処理器A11a、11bにそれぞれ送られ、フィルタ処理を受ける。フィルタ処理器A11a、11bは、送信機4で生成されたパルス信号の帯域1/TのNo倍の周波数以下の成分を通過させる低域通過フィルタである。このフィルタ処理器A11a、11bのフィルタ特性と目標信号スペクトルの関係を図6に示す。
【0034】
通常のパルスレーダでは、A/D変換器のサンプリングレートはパルス幅T相当であるが、この発明の実施の形態1ではNo倍オーバーサンプリングを行う。すなわち、フィルタ処理器A11a、11bでフィルタ処理を受けたI、Qビデオ信号は、サンプリング周波数がNo/TのA/D変換器12a、12bに入力され、レンジビン毎にディジタルI、Qビデオ信号に変換される。以後ディジタルI、Qビデオ信号をまとめてビデオ信号と称する。
【0035】
A/D変換器12a、12bからのビデオ信号は、ビデオ信号保存装置21に入力され保存される。その後、ビデオ信号保存装置21からの受信パルス信号としてのビデオ信号は、フィルタ処理器B13に入力される。
【0036】
フィルタ処理器B13は、ビデオ信号のスペクトルのサイドローブ等の帯域外の成分を強調し、等価的に信号帯域を広げる働きを有するディジタル信号処理フィルタである。このような働きをするフィルタとして、例えばウィーナーフィルタがある。なお、フィルタ処理器B13の構成は、これに限られるものではなく、要するに、ビデオ信号のスペクトルのサイドローブ等の帯域外の成分を強調し、等価的に信号帯域を広げる働きを有するものであれば、どのようなフィルタでも良い。
【0037】
パルス信号のスペクトルをS(f)と定義する。ウィーナーフィルタとしてのフィルタ処理器B13の周波数特性W(f)は式(8)で表される。
【0038】
【数8】
【0039】
式(8)において、Kは規格化定数、ηは0〜1の値をとる変数、S*(f)はS(f)の複素共役である。式(8)で表されるフィルタはウィーナーフィルタと称され、η= 0のとき、信号対雑音比(SNR)を最大にする整合フィルタとなり、η= 1のとき、逆フィルタとなる。
【0040】
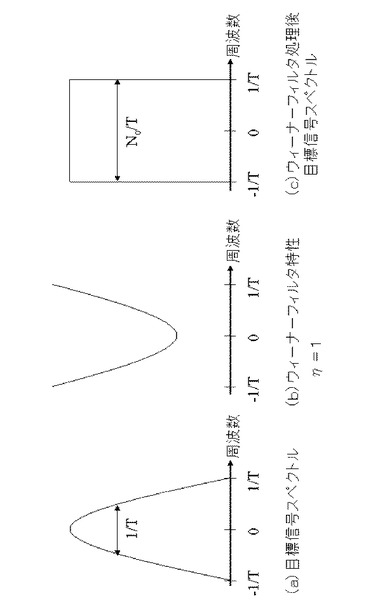
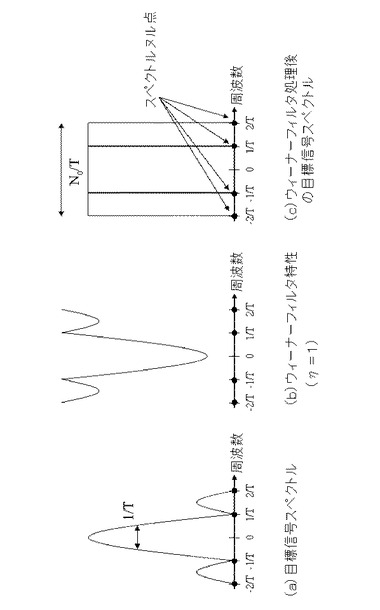
図7に、変数η= 1の場合について、(a)目標信号スペクトル、(b)ウィーナーフィルタ特性(この場合、逆フィルタに相当する)、(c)ウィーナーフィルタ処理後の目標信号スペクトルを示す。なお、図7はNo = 2の場合に相当する。帯域外成分強調フィルタ処理としてのウィーナーフィルタ処理は、目標信号帯域外の成分を強調する働きを有する。そのため、パルス信号の帯域は1/Tであるが、ウィーナーフィルタ処理により等価的に信号帯域をNo倍に広くすることができ、時間領域においてパルス幅を等価的に1/No倍に狭くすることが可能である。
【0041】
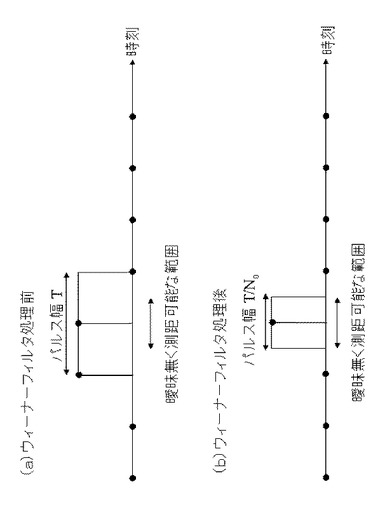
すなわち、図8(a)に示すように、ウィーナーフィルタ処理前では、合成帯域処理において曖昧なく距離計測可能な範囲とパルス幅Tが一致しないのに対し、図8(b)に示すように、ウィーナーフィルタ処理後には、合成帯域処理において曖昧なく距離計測可能な範囲とパルス幅T/Noが一致し、曖昧なく距離計測することが可能となる。このようなウィーナーフィルタ処理が行われたビデオ信号は、合成帯域処理器14に出力される。
【0042】
合成帯域処理器14は、フィルタ処理器B13でウィーナーフィルタ処理が行われたビデオ信号に対し、ΔfをNoΔfに置き換えた式(2)に基づいて、レンジビン毎に逆フーリエ変換を行い、すなわち合成帯域処理を行う。その出力を包絡線検波器15に出力する。
【0043】
包絡線検波器15は、目標信号を検出する検出処理を行い、追尾処理器16は、追尾処理を行う。包絡線検波器15で行われる検出処理は、例えばCFAR(Constant False Alarm Rate)に基づく検出処理である。なお、CFARは、入力信号に対する信号検出のための閾値を決定し、誤警報確率を一定に保って目標検出を行うものである。そして、包絡線検波器15は、検出した目標信号に対し、ΔfをNoΔfに置き換えた式(4)に基づいて目標距離を求め、すなわち距離計測を行う。また、追尾処理器16で行われる追尾処理は、例えばカルマンフィルタを用いた追尾処理である。
【0044】
この発明の実施の形態1によるレーダ装置においては、このようにステップ周波数が高く、従来の合成帯域処理では距離計測結果に曖昧性が生じるような場合でも、上述のウィーナーフィルタ処理を用いることにより曖昧なく距離計測を行うことが可能となるという作用効果を奏する。ひいては、全パルスを送信する時間に制限がある場合においても、ステップ周波数を高く設定することが可能となるため、距離分解能が向上するという作用効果を奏する。なお、ステップ周波数をパルス信号帯域以下としたとき、曖昧なく距離計測を行えることは言うまでもなく、要するに、曖昧なく距離計測を行うことができる計測条件が拡大可能という作用効果を奏するのである。
【0045】
また、上述の実施の形態1によるレーダ装置では、式(8)の変数η= 1の場合の実施例について説明したが、これに限られるものではなく、0<η≦1においてビデオ信号スペクトルのサイドローブ等の帯域外の成分を強調し、等価的に信号帯域を広げる働きを有し、同様の作用効果を奏する。また、上述の実施の形態1によるレーダ装置は、式(8)の変数η= 0と設定することで、ウィーナーフィルタが整合フィルタとなり、通常の合成帯域処理を用いるパルスレーダとして機能させることも可能である。また、上述の実施の形態1によるレーダ装置は、パルス数Nを1とすることで、すなわち合成帯域数を1とすることで、通常のパルスレーダとして機能させることももちろん可能である。
【0046】
実施の形態2.
この発明の実施の形態2によるレーダ装置は、実施の形態1の変形例であり、ウィーナーフィルタ処理を行った後に、ヌル点内挿処理を行うようにするものである。
【0047】
図9は、この発明の実施の形態2によるレーダ装置を示す構成図である。なお、各図において、同一符号は同一または相当部分を示す。図9において、フィルタ処理器B13と合成帯域処理器14との間に、ヌル点内挿処理器17を配置するようにした構成を除き、図4に示した実施の形態1によるレーダ装置と同様の構成であり、その同様の構成と、それによる同様の動作については説明を省略する。
【0048】
次に動作について説明する。図10は、No = 4の場合の(a)目標信号スペクトル、(b)ウィーナーフィルタ特性(η = 1)、(c)ウィーナーフィルタ処理後の目標信号スペクトルを示す模式図である。図10に示すように、フィルタ処理器B13におけるウィーナーフィルタ処理によれば、周波数領域において目標信号のサイドローブ成分等が強調されるが、目標信号スペクトルが0の値をとるヌル点は強調されない。そのため、ウィーナーフィルタ処理後の時間領域での目標信号には不要ピークが生じる場合がある。このため、ヌル点内挿処理器17は、ウィーナーフィルタ処理が行われたビデオ信号の周波数領域におけるヌル点の影響を低減し不要ピークを抑圧する処理を行う。このようなヌル点の影響を低減し不要ピークを抑圧する処理として、ヌル点内挿処理器17は、例えば以下のヌル点内挿処理を行う。
【0049】
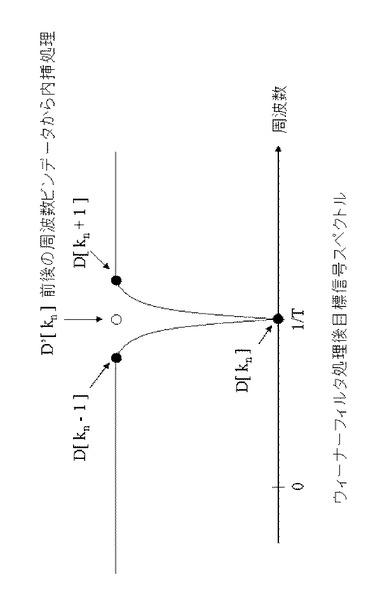
周波数領域におけるウィーナーフィルタ処理後のビデオ信号をD[k]、ヌル点に相当するkをknと定義する。但し、kは整数である。knは、パルス信号の周波数スペクトルより既知である。ヌル点の前後のデータを用い内挿処理を行い、D[kn]を推定する。D'[kn]をD[kn]の推定値と定義すると、ヌル点内挿処理器17によるヌル点内挿処理では、例えば、前後のデータを用いて式(9)によりD'[kn]を求める。
【0050】
【数9】
【0051】
あるいは、式(10)によりD'[kn]を求めても良い。
【0052】
【数10】
【0053】
図11に示すように、ヌル点内挿処理器17は、上述のように求めた白抜き丸で示すD'[kn]を、黒丸で示すD[kn]に代入し、ウィーナーフィルタ処理およびヌル点内挿処理が行われたビデオ信号を、合成帯域処理器14に出力する。
【0054】
この発明の実施の形態2によるレーダ装置においては、このようにステップ周波数が高く、従来の合成帯域処理では距離計測結果に曖昧性が生じるような場合でも、実施の形態1と同様のウィーナーフィルタ処理を用いることにより曖昧なく距離計測を行うことが可能となるという作用効果を奏する。ひいては、全パルスを送信する時間に制限がある場合においても、ステップ周波数を高く設定することが可能となるため、距離分解能が向上する。また、実施の形態2のヌル点内挿処理を用いることによりスペクトルのヌル点の影響による不要ピークを抑圧することが可能となるという作用効果も奏する。
【0055】
実施の形態3.
この発明の実施の形態3によるレーダ装置は、実施の形態1の変形例であり、ウィーナーフィルタ処理を行う前に、0詰め処理を行うようにするものである。
【0056】
図12は、この発明の実施の形態3によるレーダ装置を示す構成図である。なお、各図において、同一符号は同一または相当部分を示す。図12において、ビデオ信号保存装置21とフィルタ処理器B13との間に、0詰め処理器18を配置するようにした構成を除き、図4に示した実施の形態1によるレーダ装置と同様の構成であり、その同様の構成と、それによる同様の動作については説明を省略する。
【0057】
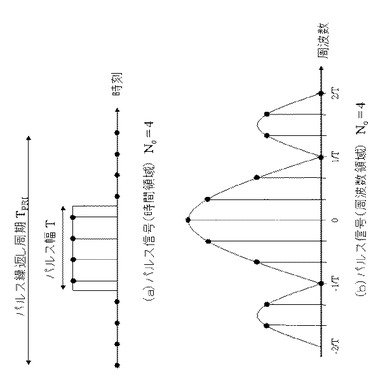
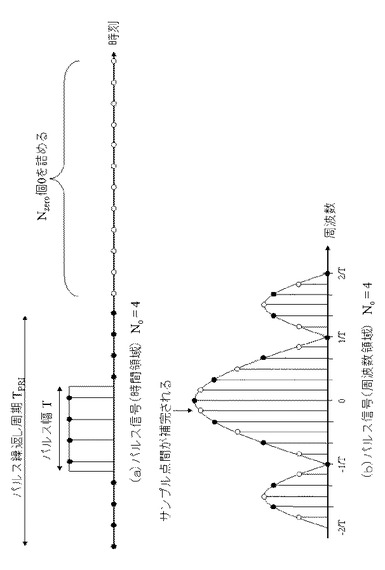
次に動作について説明する。図13、14は、No = 4の場合の0詰め処理前後の(a)パルス信号(時間領域)、(b)パルス信号(周波数領域)を示す模式図である。0詰め処理器18は、パルス繰り返し周期TPRI毎にビデオ信号の後ろに0を詰める処理を行う。A/D変換機12a、12bのサンプリング周波数はNo/Tである。そのため、パルス繰返し周期TPRI内にサンプル点はNoTPRI/T個存在する。パルス繰り返し周期TPRI内のビデオ信号を離散フーリエ変換した場合、全サンプル点中スペクトルのヌル点はNo個であるため、図13に示すように、全サンプル点NoTPRI/T個中ヌル点の割合は、T/TPRIで表され、図13の場合は1/3である。
【0058】
図14に示すように、黒丸で示すパルス繰り返し周期TPRI内のビデオ信号の後ろに、白抜き丸で示すNzero個の0を詰める。但し、図14ではNzero = NoTPRI/T = 12個である。このようにすることで、パルス繰返し周期TPRI内にサンプル点はNzero + NoTPRI/T個となる。パルス繰り返し周期TPRI内のビデオ信号を離散フーリエ変換した場合、全サンプル点中スペクトルのヌル点はNo個のままであるため、図14に示すように、全サンプル点Nzero + NoTPRI/T個中ヌル点の割合は、NoT/(TNzero + NoTPRI)で表され、図14の場合は1/6となり、スペクトルのヌル点の割合が小さくなる。このため、ヌル点の影響を低減し不要ピークを抑圧することができる。
【0059】
この発明の実施の形態3によるレーダ装置においては、このようにステップ周波数が高く、従来の合成帯域処理では距離計測結果に曖昧性が生じるような場合でも、実施の形態1と同様のウィーナーフィルタ処理を用いることにより曖昧なく距離計測を行うことが可能となるという作用効果を奏する。ひいては、全パルスを送信する時間に制限がある場合においても、ステップ周波数を高く設定することが可能となるため、距離分解能が向上する。また、実施の形態3の0詰め処理を用いることによりスペクトルのヌル点の影響による不要ピークを抑圧することが可能となるという作用効果も奏する。
【0060】
実施の形態4.
この発明の実施の形態4によるレーダ装置は、実施の形態1の変形例であり、ウィーナーフィルタ処理を行う前に、周波数シフト処理を行うようにするものである。
【0061】
図15は、この発明の実施の形態4によるレーダ装置を示す構成図である。なお、各図において、同一符号は同一または相当部分を示す。図15において、ビデオ信号保存装置21とフィルタ処理器B13との間に、周波数シフト処理器19を配置するようにした構成を除き、図4に示した実施の形態1によるレーダ装置と同様の構成であり、その同様の構成と、それによる同様の動作については説明を省略する。
【0062】
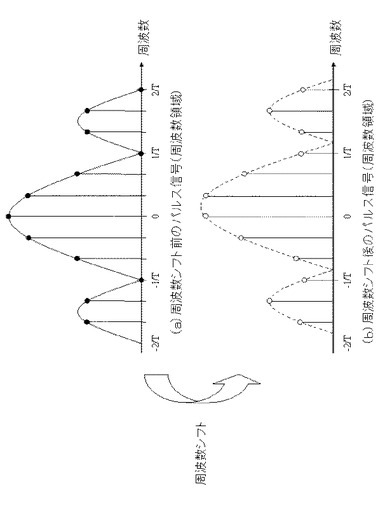
次に動作について説明する。図16は、(a)周波数シフト前のパルス信号(時間領域)、(b)周波数シフト後のパルス信号(周波数領域)を示す模式図である。図16において、周波数シフト処理器19は、ビデオ信号の周波数を変換し、周波数領域でのスペクトルのヌル点の位置をずらす処理を行う。nパルス目のパルス繰返し周期TPRI内のビデオ信号をvn[i]と定義する。但しiはレンジビン番号でありi=0,1,・・・, NoTPRI/T-1である。周波数シフト量をNshiftとすると、周波数変換は式(11)で表される。
【0063】
【数11】
【0064】
ここで、シフト量Nshiftは、例えば、周波数領域のサンプル点間隔の半分に相当するT/2NoTPRIの整数倍に設定する。なお、T/2NoTPRIはパルス繰返し周期TPRIの逆数の半分に相当する。図16の例では、T/2NoTPRIの1倍に相当する。
【0065】
次に、フィルタ処理器B13は、ウィーナーフィルタ処理が行われる。ただし、周波数シフト処理器19において、周波数シフトした分をウィーナーフィルタに考慮したフィルタ処理が行われる。
【0066】
この発明の実施の形態4によるレーダ装置においては、このようにステップ周波数が高く、従来の合成帯域処理では距離計測結果に曖昧性が生じるような場合でも、実施の形態1と同様のウィーナーフィルタ処理を用いることにより曖昧なく距離計測を行うことが可能となるという作用効果を奏する。ひいては、全パルスを送信する時間に制限がある場合においても、ステップ周波数を高く設定することが可能となるため、距離分解能が向上する。また、実施の形態4の周波数シフト処理を用い、サンプル点をヌル点からずらすことにより、スペクトルのヌル点の影響による不要ピークを抑圧することが可能となるという作用効果も奏する。
【0067】
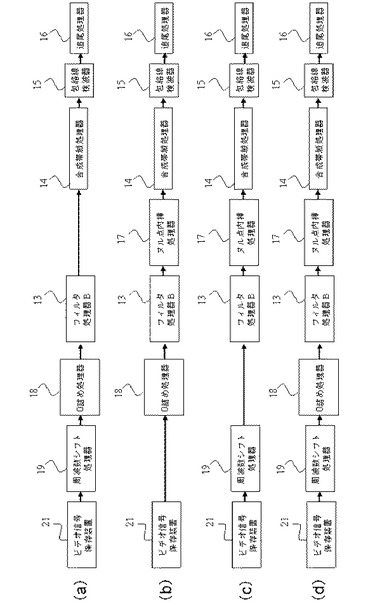
なお、実施の形態2で説明したヌル点内挿処理器17、実施の形態3で説明した0詰め処理器18、実施の形態4で説明した周波数シフト処理器19を図17(a)〜(d)に示すように構成し、スペクトルのヌル点の影響を低減することもできる。なお、図17は、図4に示した実施の形態1におけるビデオ信号保存装置21以降の構成を示している。また、図17において、(a)は、0詰め処理器18と周波数シフト処理器19を併用した場合、(b)は0詰め処理器18とヌル点内挿処理器17を併用した場合、(c)はヌル点内挿処理器17と周波数シフト処理器19を併用した場合、(d)はヌル点内挿処理器17、0詰め処理器18、周波数シフト処理器19を併用した場合を示している。なお、図17の(a)と(d)における0詰め処理器18と周波数シフト処理器19の順番は逆でも可能である。これにより、スペクトルのヌル点の影響による不要ピークを抑圧することが可能となるという作用効果を奏する。
【0068】
実施の形態5.
この発明の実施の形態5によるレーダ装置は、実施の形態1の変形例であり、フィルタパラメータ演算処理によるフィルタパラメータを用いてウィーナーフィルタ処理を行うようにするものである。
【0069】
図18は、この発明の実施の形態5によるレーダ装置を示す構成図である。なお、各図において、同一符号は同一または相当部分を示す。図18において、フィルタ処理器B13に接続するようにフィルタパラメータ演算処理器20を追加した構成を除き、図4に示した実施の形態1によるレーダ装置と同様の構成であり、その同様の構成と、それによる同様の動作については説明を省略する。
【0070】
次に動作について説明する。レーダにおいて、目標以外からの反射信号、例えば海面からの反射信号をクラッタと呼び、その強度は距離分解能に逆比例する。つまり、距離分解能が高いほどクラッタ強度は低くなる。
【0071】
ウィーナーフィルタは、フィルタパラメータη=0のとき、SNRが最大になる整合フィルタとなる。しかし、上述の[発明が解決しようとする課題]欄の記載に関する詳細な説明で述べたように、ステップ周波数Δfがパルス信号帯域より高い場合、距離折り返しが生じるため、信号対クラッタ電力比(SCR)は改善しない。一方、フィルタパラメータη=1のとき、距離折り返し無く距離分解能が向上するためSCRが改善するが、整合フィルタに比べてSNRが劣化する。
【0072】
レーダの検出性能は、信号対雑音クラッタ電力比(SNCR)で決定される。そのため、フィルタパラメータ演算処理器20は、SNCRを最大にするフィルタパラメータηoptを求め、この求めたηoptをフィルタ処理器B13に出力する。フィルタ処理器B13では、ηoptを式(8)のηとして用いてウィーナーフィルタ処理を行う。以後、ηoptの求め方について説明する。
【0073】
1パルスあたりの信号電力をSP、雑音電力をNP、クラッタ電力をCPと定義する。Nパルスを用いた合成帯域処理後の信号電力はN2SP、雑音電力はNNP、クラッタ電力はN2CPとなるため、SNCRはNSP/(NP + NCP)となる。また、ウィーナーフィルタのフィルタパラメータηによる雑音電力の増加を表わす関数をg(η)、クラッタ電力の減少を表す関数をh(η)と定義すると、ウィーナーフィルタ処理を適用した後のSNCRは、式(12)で表される。
【0074】
【数12】
【0075】
式(12)は相加相乗平均の関係式より式(13)を満たす。
【0076】
【数13】
【0077】
等号成立条件は、式(14)である。
【0078】
【数14】
【0079】
x(η) = g(η)/h(η)、x-1(η)をx(η)の逆関数と定義すると、ηoptは式(15)で表される。
【0080】
【数15】
【0081】
x(η)はウィーナーフィルタ特性の式(8)およびオーバーサンプリング数Noから求めることができる。また、式(15)中のNCP/NPは従来の合成帯域処理後のクラッタ対雑音電力比(CNR)である。このCNRは事前に計測することが可能であり、ηoptを求めてSNCRを最大にすることが可能となる。
【0082】
この発明の実施の形態5によるレーダ装置においては、このようにステップ周波数が高く、従来の合成帯域処理では距離計測結果に曖昧性が生じるような場合でも、実施の形態1と同様のウィーナーフィルタ処理を用いることにより曖昧なく距離計測を行うことが可能となるという作用効果を奏する。ひいては、全パルスを送信する時間に制限がある場合においても、ステップ周波数を高く設定することが可能となるため、距離分解能が向上する。また、実施の形態5のフィルタパラメータ演算処理を用いることにより信号対雑音クラッタ電力比を最大にすることができるという作用効果も奏する。
用効果を奏する。
【0083】
なお、フィルタパラメータ演算処理器20は、実施の形態2〜4の構成に追加し、フィルタパラメータ演算処理器20の出力であるηoptを、実施の形態2〜4のフィルタ処理器B13に出力するようにしても良い。
【0084】
また、上述の実施の形態5によるレーダ装置においては、フィルタパラメータ演算処理器20がSNCRを最大にするフィルタパラメータを求めるようにしたので、SNCRの改善効果を最大に高めることができ、好適であるものの、これに限られるものではなく、フィルタパラメータ演算処理器20がSNCRを実使用上望ましい所定の値以上にするフィルタパラメータを求めるようにしても良く、同様の作用効果を奏する。
【0085】
実施の形態6.
この発明の実施の形態6によるレーダ装置は、実施の形態5の変形例であり、雑音・クラッタ電力推定処理およびフィルタパラメータ演算処理によるフィルタパラメータを用いてウィーナーフィルタ処理を行うようにするものである。
【0086】
図19は、この発明の実施の形態6によるレーダ装置を示す構成図である。なお、各図において、同一符号は同一または相当部分を示す。図19において、合成帯域処理器14、包絡線検波器15、フィルタパラメータ演算処理器20に接続するように雑音・クラッタ電力推定処理器21を追加した構成を除き、図18に示した実施の形態5によるレーダ装置と同様の構成であり、その同様の構成と、それによる同様の動作については説明を省略する。
【0087】
次に動作について説明する。フィルタパラメータ演算処理器20において、CNRを適宜観測し、最適フィルタパラメータηoptを適応的に決定するようにしてもよい。例えば、図19に示す雑音・クラッタ電力推定処理器22において、合成帯域処理器14の処理結果から雑音電力、クラッタ電力を推定し、CNRをフィルタパラメータ演算処理器20に出力する。
【0088】
雑音電力を求める際、雑音・クラッタ電力推定処理器22は、送信機4の出力を止めた状態で、合成帯域処理器14の処理結果から雑音電力を求める。あるいは、雑音電力は、受信機雑音指数、ボルツマン定数、受信機温度、フィルタ帯域の積で決定されるので、受信機雑音指数、ボルツマン定数、受信機温度、フィルタ帯域の積から求めるようにしても良い。
【0089】
クラッタ電力を推定する際、雑音・クラッタ電力推定処理器22は、電波照射方向に目標が存在しない場合に合成帯域処理器14の処理結果からクラッタ電力を推定する。あるいは、包絡線検波器15で検出された目標を合成帯域処理器14の処理結果から除いたデータからクラッタ電力を推定するようにしても良い。
【0090】
この発明の実施の形態6によるレーダ装置においては、このようにステップ周波数が高く、従来の合成帯域処理では距離計測結果に曖昧性が生じるような場合でも、実施の形態1と同様のウィーナーフィルタ処理を用いることにより曖昧なく距離計測を行うことが可能となるという作用効果を奏する。ひいては、全パルスを送信する時間に制限がある場合においても、ステップ周波数を高く設定することが可能となるため、距離分解能が向上する。また、実施の形態6の雑音・クラッタ電力推定処理およびフィルタパラメータ演算処理を用いることにより信号対雑音クラッタ電力比を最大にすることができるという作用効果も奏する。
【0091】
なお、フィルタパラメータ演算処理器20および雑音・クラッタ電力推定処理器22は、実施の形態2〜4の構成に追加し、雑音・クラッタ電力推定処理器22の出力であるCNRを、実施の形態2〜4の構成に追加したフィルタパラメータ演算処理器20に出力するようにしても良い。
【0092】
また、上述の実施の形態5、6によるレーダ装置において、距離計測条件に応じて、フィルタパラメータ演算処理器20が式(8)の変数ηを0≦η≦1の範囲で可変させ、フィルタ処理器B13に出力し設定するようにすることも可能である。例えば、クラッタ電力は十分に小さく距離分解能は要求されずSNRを最大にしたい距離計測条件ではη=0と設定し、クラッタ電力は十分に小さく距離分解能を最大にしたい距離計測条件ではη=1と設定し、SNCRを最大にしたい距離計測条件ではη=ηoptと設定し、あるいは、距離分解能、SNRおよび/またはSNCR等に応じて0≦η≦1の範囲内で設定するようにしても良い。これにより、例えば計測環境の変化に適応して、好適なレーダの諸元を柔軟に実現することができるという作用効果を奏する。このとき、パルス数Nを1とすることで、すなわち合成帯域数を1とすることで、通常のパルスレーダとして機能させることももちろん可能である。
【符号の説明】
【0093】
1 任意周波数発振器
2 基準中間周波数信号発振器
3a、3b 周波数変換機
4 送信機
5 送受切替器
6 アンテナ
7 増幅器
8 分配器
9a、9b 位相検波器
10 90度ハイブリッド器
11a、11b フィルタ処理器A
12a、12b A/D変換器
13 フィルタ処理器B
14 合成帯域処理器
15 包絡線検波器
16 追尾処理器
17 ヌル点内挿処理器
18 0詰め処理器
19 周波数シフト処理器
20 フィルタパラメータ演算処理器
21 ビデオ信号保存装置
22 雑音・クラッタ電力推定処理器
【技術分野】
【0001】
この発明は、合成帯域処理を用いたレーダ装置に関するものである。
【背景技術】
【0002】
従来、レーダの主諸元の1つである距離分解能を向上させる方法の1つとして合成帯域処理が知られている。合成帯域処理は、パルス毎に周波数をステップ状に変化させてパルス信号を送信し、パルス繰り返し周期内の受信信号のダウンコンバートをパルス信号と同じ周波数で行ってビデオ信号を求め、そのビデオ信号を逆フーリエ変換することにより、距離分解能を高分解能化する方法である(例えば、非特許文献1)。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】Donald R.Wehner著, “High-Resolution Radar”, Artech House, Second Edition, Chapter 5, “Synthetic High-Range-Resolution Radar”, 第197頁〜第237頁, September 1994
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、非特許文献1に開示されている合成帯域処理を用いた従来のレーダ装置においては、後述するように、ステップ周波数をパルス信号帯域より大きくすると、曖昧なく距離計測を行うことができないという問題点があった。ひいては、全パルスを送信する時間に制限がある場合、パルス数が制限されることになり、距離分解能が制限されるという問題点もあった。
【0005】
この発明は上記のような課題を解決するためになされたもので、ステップ周波数をパルス信号帯域より大きくした場合においても、曖昧なく距離計測可能なレーダ装置を提供することを目的としている。
【課題を解決するための手段】
【0006】
この発明に係るレーダ装置は、ステップ周波数ずつ周波数が異なる受信パルス信号に基づく合成帯域処理により距離計測を行うレーダ装置であって、前記合成帯域処理が行われる前記受信パルス信号のスペクトルの帯域外の成分を強調する帯域外成分強調フィルタ処理を行うフィルタ処理器と、を備えたものである。
【発明の効果】
【0007】
この発明は、レーダ装置において、ステップ周波数をパルス信号帯域より大きくしても、曖昧なく距離計測可能とすることができる。
【図面の簡単な説明】
【0008】
【図1】この発明の実施の形態1によるレーダ装置を説明するための説明図
【図2】この発明の実施の形態1によるレーダ装置を説明するための説明図
【図3】この発明の実施の形態1によるレーダ装置を説明するための説明図
【図4】この発明の実施の形態1によるレーダ装置を示す構成図
【図5】この発明の実施の形態1によるレーダ装置を説明するための説明図
【図6】この発明の実施の形態1によるレーダ装置を説明するための説明図
【図7】この発明の実施の形態1によるレーダ装置を説明するための説明図
【図8】この発明の実施の形態1によるレーダ装置を説明するための説明図
【図9】この発明の実施の形態2によるレーダ装置を示す構成図
【図10】この発明の実施の形態2によるレーダ装置を説明するための説明図
【図11】この発明の実施の形態2によるレーダ装置を説明するための説明図
【図12】この発明の実施の形態3によるレーダ装置を示す構成図
【図13】この発明の実施の形態3によるレーダ装置を説明するための説明図
【図14】この発明の実施の形態3によるレーダ装置を説明するための説明図
【図15】この発明の実施の形態4によるレーダ装置を示す構成図
【図16】この発明の実施の形態4によるレーダ装置を説明するための説明図
【図17】この発明の実施の形態4によるレーダ装置を示す構成図
【図18】この発明の実施の形態5によるレーダ装置を示す構成図
【図19】この発明の実施の形態6によるレーダ装置を示す構成図
【発明を実施するための形態】
【0009】
実施の形態1.
まず、[発明が解決しようとする課題]欄の記載に関する詳細な説明も含めて、この発明の実施の形態1によるレーダ装置においても用いる合成帯域処理の原理について説明する。光速をc、目標の距離をr、目標信号の振幅を1、パルス数をN、パルス番号をn = 0,1,・・・,N-1とし、送信最小周波数をf0、n番目のパルスの周波数をfn = f0 + nΔfとすると、目標信号が存在するレンジビンにおける受信ビデオ信号は式(1)で表される。
【0010】
【数1】
【0011】
式(1)に逆フーリエ変換を行い、式(2)が得られる。
【0012】
【数2】
【0013】
式(2)が最大値をとるときの整数kをkPとおくと、kPは、式(3)で表される。
【0014】
【数3】
【0015】
よって、目標距離は、式(4)で求めることができる。
【0016】
【数4】
【0017】
さらに、距離分解能は、式(5)で表される。
【0018】
【数5】
【0019】
つまり距離分解能Δrは全送信帯域ΔfNで決定され、ΔfまたはNを大きくするほど、高分解能化が可能となる。また、曖昧なく距離計測可能な範囲は、式(6)となる。
【0020】
【数6】
【0021】
図1に合成帯域処理の原理図を示す。従来のパルスレーダでは、パルス幅をTとした場合、パルス幅Tの間隔で受信信号をサンプリングする。また、パルス信号の信号帯域は、1/Tで表される。そのため、従来のレーダ装置のように、この信号帯域1/Tのまま受信ビデオ信号に帯域合成、すなわち式(2)の逆フーリエ変換を行う場合、曖昧なく距離計測するためには、パルス幅に相当する距離cT/2が、曖昧なく距離計測可能な距離rmax以下であれば良く、図2(a)に示すように、式(7)を満足すれば良い。
【0022】
【数7】
【0023】
このように、従来の合成帯域処理を行うと、曖昧なく距離計測可能な範囲は式(7)で決定されるため、図2(b)に示すように、ステップ周波数Δfがパルス信号帯域1/Tより大きい場合、目標距離と異なる計測距離を求めることになる。すなわち、曖昧なく距離計測可能な範囲を超えると、原点に戻って計測距離を示す、いわゆる距離折り返しが生じ、正しく距離計測ができない欠点を有する。ひいては、図3に示すように、全パルスを送信する時間である全パルス送信時間に制限があるとパルス数Nが制限され、曖昧なく距離計測するためステップ周波数Δfが制限され、すなわちNΔfが制限されることから、式(5)で表される距離分解能が制限されることになる。
【0024】
これに対し、この発明の実施の形態1によるレーダ装置は、帯域外成分強調フィルタ処理としてのウィーナーフィルタ処理を合成帯域処理前に行うフィルタ処理器を設けることにより、ステップ周波数をパルス信号帯域より大きくした場合においても、曖昧なく距離計測可能とするものである。
【0025】
図4は、この発明の実施の形態1によるレーダ装置を示す構成図である。なお、各図において、同一符号は同一または相当部分を示す。図4において、1は任意周波数発振器、2は基準中間周波数信号発振器、3a、3bは周波数変換機、4は送信機、5は送受切替器、6はアンテナ、7は増幅器、8は分配器、9a、9bは位相検波器、10は90度ハイブリッド器、11a、11bはフィルタ処理器A、12a、12bはA/D変換器、13はフィルタ処理器B、14は合成帯域処理器、15は包絡線検波器、16は追尾処理器、21はビデオ信号保存装置である。
【0026】
次に動作について説明する。図4において、任意周波数発振器1は、パルス繰り返し周期TPRIを設定するとともに、パルス繰り返し周期TPRI毎に送信周波数が任意の周波数で変化するN個の周波数を繰り返し設定し発振する。但し、パルス繰り返し周期TPRI毎に発振した周波数を低い順から並べた場合、隣接周波数の周波数差は所定の周波数間隔Δfの整数倍、すなわちNo倍となるようにする。ここでは図5に示すようにパルス毎にステップ周波数NoΔfずつ高く設定する。なお、図5はNo=2の場合に相当する。任意周波数発振器1が発振した信号は周波数変換機3a、3bに送られる。
【0027】
基準中間周波数信号発振器2は、基準中間周波数信号を発振し、周波数変換機3aと90度ハイブリッド器10に送る。
【0028】
周波数変換機3aは、任意周波数発振器1で発振された信号の周波数と、基準中間周波数信号発振器2で発振された基準中間周波数信号の周波数との和の周波数の送信キャリア信号を生成し、送信機4に送る。
【0029】
送信機4は、周波数変換機3aからの信号を所定のパルス幅Tにパルス化してパルス信号として生成し、その電力を増幅し、送受切替器5に送る。以後、送信機4で生成される周波数シーケンスを、送信周波数シーケンスと称する。
【0030】
送受切替器5は、送信機4からのパルス信号をアンテナ6に送信した後、送受を切り替える。目標からの反射信号は、アンテナ6で受信された後、周波数変換機3bに送られる。周波数変換機3bは、反射信号を、その周波数と任意周波数発振器1で発振された信号の周波数との差の周波数にIF(Intermediate Frequency)信号として変換し、増幅器7に送る。増幅器7は、周波数変換機3bからのIF信号の電力を増幅し、分配器8に送る。
【0031】
分配器8は、増幅器7からの増幅IF信号を2つの信号に分け、それぞれ位相検波器9a、9bに送る。
【0032】
一方、90度ハイブリッド器10は、基準中間周波数信号発振器2からの基準中間周波数信号を、90度の位相差を持った2つの信号に分離し、位相検波器9a、9bに出力する。位相検波器9a、9bは、分配器8からの入力信号および90度ハイブリッド器10からの入力信号から、IF信号の周波数と基準中間周波数信号の周波数との差の周波数をもち、互いに90度の位相差をもつI成分のビデオ信号、Q成分のビデオ信号(以下、I、Qビデオ信号と称する)を生成する。
【0033】
この生成されたI、Qビデオ信号は、フィルタ処理器A11a、11bにそれぞれ送られ、フィルタ処理を受ける。フィルタ処理器A11a、11bは、送信機4で生成されたパルス信号の帯域1/TのNo倍の周波数以下の成分を通過させる低域通過フィルタである。このフィルタ処理器A11a、11bのフィルタ特性と目標信号スペクトルの関係を図6に示す。
【0034】
通常のパルスレーダでは、A/D変換器のサンプリングレートはパルス幅T相当であるが、この発明の実施の形態1ではNo倍オーバーサンプリングを行う。すなわち、フィルタ処理器A11a、11bでフィルタ処理を受けたI、Qビデオ信号は、サンプリング周波数がNo/TのA/D変換器12a、12bに入力され、レンジビン毎にディジタルI、Qビデオ信号に変換される。以後ディジタルI、Qビデオ信号をまとめてビデオ信号と称する。
【0035】
A/D変換器12a、12bからのビデオ信号は、ビデオ信号保存装置21に入力され保存される。その後、ビデオ信号保存装置21からの受信パルス信号としてのビデオ信号は、フィルタ処理器B13に入力される。
【0036】
フィルタ処理器B13は、ビデオ信号のスペクトルのサイドローブ等の帯域外の成分を強調し、等価的に信号帯域を広げる働きを有するディジタル信号処理フィルタである。このような働きをするフィルタとして、例えばウィーナーフィルタがある。なお、フィルタ処理器B13の構成は、これに限られるものではなく、要するに、ビデオ信号のスペクトルのサイドローブ等の帯域外の成分を強調し、等価的に信号帯域を広げる働きを有するものであれば、どのようなフィルタでも良い。
【0037】
パルス信号のスペクトルをS(f)と定義する。ウィーナーフィルタとしてのフィルタ処理器B13の周波数特性W(f)は式(8)で表される。
【0038】
【数8】
【0039】
式(8)において、Kは規格化定数、ηは0〜1の値をとる変数、S*(f)はS(f)の複素共役である。式(8)で表されるフィルタはウィーナーフィルタと称され、η= 0のとき、信号対雑音比(SNR)を最大にする整合フィルタとなり、η= 1のとき、逆フィルタとなる。
【0040】
図7に、変数η= 1の場合について、(a)目標信号スペクトル、(b)ウィーナーフィルタ特性(この場合、逆フィルタに相当する)、(c)ウィーナーフィルタ処理後の目標信号スペクトルを示す。なお、図7はNo = 2の場合に相当する。帯域外成分強調フィルタ処理としてのウィーナーフィルタ処理は、目標信号帯域外の成分を強調する働きを有する。そのため、パルス信号の帯域は1/Tであるが、ウィーナーフィルタ処理により等価的に信号帯域をNo倍に広くすることができ、時間領域においてパルス幅を等価的に1/No倍に狭くすることが可能である。
【0041】
すなわち、図8(a)に示すように、ウィーナーフィルタ処理前では、合成帯域処理において曖昧なく距離計測可能な範囲とパルス幅Tが一致しないのに対し、図8(b)に示すように、ウィーナーフィルタ処理後には、合成帯域処理において曖昧なく距離計測可能な範囲とパルス幅T/Noが一致し、曖昧なく距離計測することが可能となる。このようなウィーナーフィルタ処理が行われたビデオ信号は、合成帯域処理器14に出力される。
【0042】
合成帯域処理器14は、フィルタ処理器B13でウィーナーフィルタ処理が行われたビデオ信号に対し、ΔfをNoΔfに置き換えた式(2)に基づいて、レンジビン毎に逆フーリエ変換を行い、すなわち合成帯域処理を行う。その出力を包絡線検波器15に出力する。
【0043】
包絡線検波器15は、目標信号を検出する検出処理を行い、追尾処理器16は、追尾処理を行う。包絡線検波器15で行われる検出処理は、例えばCFAR(Constant False Alarm Rate)に基づく検出処理である。なお、CFARは、入力信号に対する信号検出のための閾値を決定し、誤警報確率を一定に保って目標検出を行うものである。そして、包絡線検波器15は、検出した目標信号に対し、ΔfをNoΔfに置き換えた式(4)に基づいて目標距離を求め、すなわち距離計測を行う。また、追尾処理器16で行われる追尾処理は、例えばカルマンフィルタを用いた追尾処理である。
【0044】
この発明の実施の形態1によるレーダ装置においては、このようにステップ周波数が高く、従来の合成帯域処理では距離計測結果に曖昧性が生じるような場合でも、上述のウィーナーフィルタ処理を用いることにより曖昧なく距離計測を行うことが可能となるという作用効果を奏する。ひいては、全パルスを送信する時間に制限がある場合においても、ステップ周波数を高く設定することが可能となるため、距離分解能が向上するという作用効果を奏する。なお、ステップ周波数をパルス信号帯域以下としたとき、曖昧なく距離計測を行えることは言うまでもなく、要するに、曖昧なく距離計測を行うことができる計測条件が拡大可能という作用効果を奏するのである。
【0045】
また、上述の実施の形態1によるレーダ装置では、式(8)の変数η= 1の場合の実施例について説明したが、これに限られるものではなく、0<η≦1においてビデオ信号スペクトルのサイドローブ等の帯域外の成分を強調し、等価的に信号帯域を広げる働きを有し、同様の作用効果を奏する。また、上述の実施の形態1によるレーダ装置は、式(8)の変数η= 0と設定することで、ウィーナーフィルタが整合フィルタとなり、通常の合成帯域処理を用いるパルスレーダとして機能させることも可能である。また、上述の実施の形態1によるレーダ装置は、パルス数Nを1とすることで、すなわち合成帯域数を1とすることで、通常のパルスレーダとして機能させることももちろん可能である。
【0046】
実施の形態2.
この発明の実施の形態2によるレーダ装置は、実施の形態1の変形例であり、ウィーナーフィルタ処理を行った後に、ヌル点内挿処理を行うようにするものである。
【0047】
図9は、この発明の実施の形態2によるレーダ装置を示す構成図である。なお、各図において、同一符号は同一または相当部分を示す。図9において、フィルタ処理器B13と合成帯域処理器14との間に、ヌル点内挿処理器17を配置するようにした構成を除き、図4に示した実施の形態1によるレーダ装置と同様の構成であり、その同様の構成と、それによる同様の動作については説明を省略する。
【0048】
次に動作について説明する。図10は、No = 4の場合の(a)目標信号スペクトル、(b)ウィーナーフィルタ特性(η = 1)、(c)ウィーナーフィルタ処理後の目標信号スペクトルを示す模式図である。図10に示すように、フィルタ処理器B13におけるウィーナーフィルタ処理によれば、周波数領域において目標信号のサイドローブ成分等が強調されるが、目標信号スペクトルが0の値をとるヌル点は強調されない。そのため、ウィーナーフィルタ処理後の時間領域での目標信号には不要ピークが生じる場合がある。このため、ヌル点内挿処理器17は、ウィーナーフィルタ処理が行われたビデオ信号の周波数領域におけるヌル点の影響を低減し不要ピークを抑圧する処理を行う。このようなヌル点の影響を低減し不要ピークを抑圧する処理として、ヌル点内挿処理器17は、例えば以下のヌル点内挿処理を行う。
【0049】
周波数領域におけるウィーナーフィルタ処理後のビデオ信号をD[k]、ヌル点に相当するkをknと定義する。但し、kは整数である。knは、パルス信号の周波数スペクトルより既知である。ヌル点の前後のデータを用い内挿処理を行い、D[kn]を推定する。D'[kn]をD[kn]の推定値と定義すると、ヌル点内挿処理器17によるヌル点内挿処理では、例えば、前後のデータを用いて式(9)によりD'[kn]を求める。
【0050】
【数9】
【0051】
あるいは、式(10)によりD'[kn]を求めても良い。
【0052】
【数10】
【0053】
図11に示すように、ヌル点内挿処理器17は、上述のように求めた白抜き丸で示すD'[kn]を、黒丸で示すD[kn]に代入し、ウィーナーフィルタ処理およびヌル点内挿処理が行われたビデオ信号を、合成帯域処理器14に出力する。
【0054】
この発明の実施の形態2によるレーダ装置においては、このようにステップ周波数が高く、従来の合成帯域処理では距離計測結果に曖昧性が生じるような場合でも、実施の形態1と同様のウィーナーフィルタ処理を用いることにより曖昧なく距離計測を行うことが可能となるという作用効果を奏する。ひいては、全パルスを送信する時間に制限がある場合においても、ステップ周波数を高く設定することが可能となるため、距離分解能が向上する。また、実施の形態2のヌル点内挿処理を用いることによりスペクトルのヌル点の影響による不要ピークを抑圧することが可能となるという作用効果も奏する。
【0055】
実施の形態3.
この発明の実施の形態3によるレーダ装置は、実施の形態1の変形例であり、ウィーナーフィルタ処理を行う前に、0詰め処理を行うようにするものである。
【0056】
図12は、この発明の実施の形態3によるレーダ装置を示す構成図である。なお、各図において、同一符号は同一または相当部分を示す。図12において、ビデオ信号保存装置21とフィルタ処理器B13との間に、0詰め処理器18を配置するようにした構成を除き、図4に示した実施の形態1によるレーダ装置と同様の構成であり、その同様の構成と、それによる同様の動作については説明を省略する。
【0057】
次に動作について説明する。図13、14は、No = 4の場合の0詰め処理前後の(a)パルス信号(時間領域)、(b)パルス信号(周波数領域)を示す模式図である。0詰め処理器18は、パルス繰り返し周期TPRI毎にビデオ信号の後ろに0を詰める処理を行う。A/D変換機12a、12bのサンプリング周波数はNo/Tである。そのため、パルス繰返し周期TPRI内にサンプル点はNoTPRI/T個存在する。パルス繰り返し周期TPRI内のビデオ信号を離散フーリエ変換した場合、全サンプル点中スペクトルのヌル点はNo個であるため、図13に示すように、全サンプル点NoTPRI/T個中ヌル点の割合は、T/TPRIで表され、図13の場合は1/3である。
【0058】
図14に示すように、黒丸で示すパルス繰り返し周期TPRI内のビデオ信号の後ろに、白抜き丸で示すNzero個の0を詰める。但し、図14ではNzero = NoTPRI/T = 12個である。このようにすることで、パルス繰返し周期TPRI内にサンプル点はNzero + NoTPRI/T個となる。パルス繰り返し周期TPRI内のビデオ信号を離散フーリエ変換した場合、全サンプル点中スペクトルのヌル点はNo個のままであるため、図14に示すように、全サンプル点Nzero + NoTPRI/T個中ヌル点の割合は、NoT/(TNzero + NoTPRI)で表され、図14の場合は1/6となり、スペクトルのヌル点の割合が小さくなる。このため、ヌル点の影響を低減し不要ピークを抑圧することができる。
【0059】
この発明の実施の形態3によるレーダ装置においては、このようにステップ周波数が高く、従来の合成帯域処理では距離計測結果に曖昧性が生じるような場合でも、実施の形態1と同様のウィーナーフィルタ処理を用いることにより曖昧なく距離計測を行うことが可能となるという作用効果を奏する。ひいては、全パルスを送信する時間に制限がある場合においても、ステップ周波数を高く設定することが可能となるため、距離分解能が向上する。また、実施の形態3の0詰め処理を用いることによりスペクトルのヌル点の影響による不要ピークを抑圧することが可能となるという作用効果も奏する。
【0060】
実施の形態4.
この発明の実施の形態4によるレーダ装置は、実施の形態1の変形例であり、ウィーナーフィルタ処理を行う前に、周波数シフト処理を行うようにするものである。
【0061】
図15は、この発明の実施の形態4によるレーダ装置を示す構成図である。なお、各図において、同一符号は同一または相当部分を示す。図15において、ビデオ信号保存装置21とフィルタ処理器B13との間に、周波数シフト処理器19を配置するようにした構成を除き、図4に示した実施の形態1によるレーダ装置と同様の構成であり、その同様の構成と、それによる同様の動作については説明を省略する。
【0062】
次に動作について説明する。図16は、(a)周波数シフト前のパルス信号(時間領域)、(b)周波数シフト後のパルス信号(周波数領域)を示す模式図である。図16において、周波数シフト処理器19は、ビデオ信号の周波数を変換し、周波数領域でのスペクトルのヌル点の位置をずらす処理を行う。nパルス目のパルス繰返し周期TPRI内のビデオ信号をvn[i]と定義する。但しiはレンジビン番号でありi=0,1,・・・, NoTPRI/T-1である。周波数シフト量をNshiftとすると、周波数変換は式(11)で表される。
【0063】
【数11】
【0064】
ここで、シフト量Nshiftは、例えば、周波数領域のサンプル点間隔の半分に相当するT/2NoTPRIの整数倍に設定する。なお、T/2NoTPRIはパルス繰返し周期TPRIの逆数の半分に相当する。図16の例では、T/2NoTPRIの1倍に相当する。
【0065】
次に、フィルタ処理器B13は、ウィーナーフィルタ処理が行われる。ただし、周波数シフト処理器19において、周波数シフトした分をウィーナーフィルタに考慮したフィルタ処理が行われる。
【0066】
この発明の実施の形態4によるレーダ装置においては、このようにステップ周波数が高く、従来の合成帯域処理では距離計測結果に曖昧性が生じるような場合でも、実施の形態1と同様のウィーナーフィルタ処理を用いることにより曖昧なく距離計測を行うことが可能となるという作用効果を奏する。ひいては、全パルスを送信する時間に制限がある場合においても、ステップ周波数を高く設定することが可能となるため、距離分解能が向上する。また、実施の形態4の周波数シフト処理を用い、サンプル点をヌル点からずらすことにより、スペクトルのヌル点の影響による不要ピークを抑圧することが可能となるという作用効果も奏する。
【0067】
なお、実施の形態2で説明したヌル点内挿処理器17、実施の形態3で説明した0詰め処理器18、実施の形態4で説明した周波数シフト処理器19を図17(a)〜(d)に示すように構成し、スペクトルのヌル点の影響を低減することもできる。なお、図17は、図4に示した実施の形態1におけるビデオ信号保存装置21以降の構成を示している。また、図17において、(a)は、0詰め処理器18と周波数シフト処理器19を併用した場合、(b)は0詰め処理器18とヌル点内挿処理器17を併用した場合、(c)はヌル点内挿処理器17と周波数シフト処理器19を併用した場合、(d)はヌル点内挿処理器17、0詰め処理器18、周波数シフト処理器19を併用した場合を示している。なお、図17の(a)と(d)における0詰め処理器18と周波数シフト処理器19の順番は逆でも可能である。これにより、スペクトルのヌル点の影響による不要ピークを抑圧することが可能となるという作用効果を奏する。
【0068】
実施の形態5.
この発明の実施の形態5によるレーダ装置は、実施の形態1の変形例であり、フィルタパラメータ演算処理によるフィルタパラメータを用いてウィーナーフィルタ処理を行うようにするものである。
【0069】
図18は、この発明の実施の形態5によるレーダ装置を示す構成図である。なお、各図において、同一符号は同一または相当部分を示す。図18において、フィルタ処理器B13に接続するようにフィルタパラメータ演算処理器20を追加した構成を除き、図4に示した実施の形態1によるレーダ装置と同様の構成であり、その同様の構成と、それによる同様の動作については説明を省略する。
【0070】
次に動作について説明する。レーダにおいて、目標以外からの反射信号、例えば海面からの反射信号をクラッタと呼び、その強度は距離分解能に逆比例する。つまり、距離分解能が高いほどクラッタ強度は低くなる。
【0071】
ウィーナーフィルタは、フィルタパラメータη=0のとき、SNRが最大になる整合フィルタとなる。しかし、上述の[発明が解決しようとする課題]欄の記載に関する詳細な説明で述べたように、ステップ周波数Δfがパルス信号帯域より高い場合、距離折り返しが生じるため、信号対クラッタ電力比(SCR)は改善しない。一方、フィルタパラメータη=1のとき、距離折り返し無く距離分解能が向上するためSCRが改善するが、整合フィルタに比べてSNRが劣化する。
【0072】
レーダの検出性能は、信号対雑音クラッタ電力比(SNCR)で決定される。そのため、フィルタパラメータ演算処理器20は、SNCRを最大にするフィルタパラメータηoptを求め、この求めたηoptをフィルタ処理器B13に出力する。フィルタ処理器B13では、ηoptを式(8)のηとして用いてウィーナーフィルタ処理を行う。以後、ηoptの求め方について説明する。
【0073】
1パルスあたりの信号電力をSP、雑音電力をNP、クラッタ電力をCPと定義する。Nパルスを用いた合成帯域処理後の信号電力はN2SP、雑音電力はNNP、クラッタ電力はN2CPとなるため、SNCRはNSP/(NP + NCP)となる。また、ウィーナーフィルタのフィルタパラメータηによる雑音電力の増加を表わす関数をg(η)、クラッタ電力の減少を表す関数をh(η)と定義すると、ウィーナーフィルタ処理を適用した後のSNCRは、式(12)で表される。
【0074】
【数12】
【0075】
式(12)は相加相乗平均の関係式より式(13)を満たす。
【0076】
【数13】
【0077】
等号成立条件は、式(14)である。
【0078】
【数14】
【0079】
x(η) = g(η)/h(η)、x-1(η)をx(η)の逆関数と定義すると、ηoptは式(15)で表される。
【0080】
【数15】
【0081】
x(η)はウィーナーフィルタ特性の式(8)およびオーバーサンプリング数Noから求めることができる。また、式(15)中のNCP/NPは従来の合成帯域処理後のクラッタ対雑音電力比(CNR)である。このCNRは事前に計測することが可能であり、ηoptを求めてSNCRを最大にすることが可能となる。
【0082】
この発明の実施の形態5によるレーダ装置においては、このようにステップ周波数が高く、従来の合成帯域処理では距離計測結果に曖昧性が生じるような場合でも、実施の形態1と同様のウィーナーフィルタ処理を用いることにより曖昧なく距離計測を行うことが可能となるという作用効果を奏する。ひいては、全パルスを送信する時間に制限がある場合においても、ステップ周波数を高く設定することが可能となるため、距離分解能が向上する。また、実施の形態5のフィルタパラメータ演算処理を用いることにより信号対雑音クラッタ電力比を最大にすることができるという作用効果も奏する。
用効果を奏する。
【0083】
なお、フィルタパラメータ演算処理器20は、実施の形態2〜4の構成に追加し、フィルタパラメータ演算処理器20の出力であるηoptを、実施の形態2〜4のフィルタ処理器B13に出力するようにしても良い。
【0084】
また、上述の実施の形態5によるレーダ装置においては、フィルタパラメータ演算処理器20がSNCRを最大にするフィルタパラメータを求めるようにしたので、SNCRの改善効果を最大に高めることができ、好適であるものの、これに限られるものではなく、フィルタパラメータ演算処理器20がSNCRを実使用上望ましい所定の値以上にするフィルタパラメータを求めるようにしても良く、同様の作用効果を奏する。
【0085】
実施の形態6.
この発明の実施の形態6によるレーダ装置は、実施の形態5の変形例であり、雑音・クラッタ電力推定処理およびフィルタパラメータ演算処理によるフィルタパラメータを用いてウィーナーフィルタ処理を行うようにするものである。
【0086】
図19は、この発明の実施の形態6によるレーダ装置を示す構成図である。なお、各図において、同一符号は同一または相当部分を示す。図19において、合成帯域処理器14、包絡線検波器15、フィルタパラメータ演算処理器20に接続するように雑音・クラッタ電力推定処理器21を追加した構成を除き、図18に示した実施の形態5によるレーダ装置と同様の構成であり、その同様の構成と、それによる同様の動作については説明を省略する。
【0087】
次に動作について説明する。フィルタパラメータ演算処理器20において、CNRを適宜観測し、最適フィルタパラメータηoptを適応的に決定するようにしてもよい。例えば、図19に示す雑音・クラッタ電力推定処理器22において、合成帯域処理器14の処理結果から雑音電力、クラッタ電力を推定し、CNRをフィルタパラメータ演算処理器20に出力する。
【0088】
雑音電力を求める際、雑音・クラッタ電力推定処理器22は、送信機4の出力を止めた状態で、合成帯域処理器14の処理結果から雑音電力を求める。あるいは、雑音電力は、受信機雑音指数、ボルツマン定数、受信機温度、フィルタ帯域の積で決定されるので、受信機雑音指数、ボルツマン定数、受信機温度、フィルタ帯域の積から求めるようにしても良い。
【0089】
クラッタ電力を推定する際、雑音・クラッタ電力推定処理器22は、電波照射方向に目標が存在しない場合に合成帯域処理器14の処理結果からクラッタ電力を推定する。あるいは、包絡線検波器15で検出された目標を合成帯域処理器14の処理結果から除いたデータからクラッタ電力を推定するようにしても良い。
【0090】
この発明の実施の形態6によるレーダ装置においては、このようにステップ周波数が高く、従来の合成帯域処理では距離計測結果に曖昧性が生じるような場合でも、実施の形態1と同様のウィーナーフィルタ処理を用いることにより曖昧なく距離計測を行うことが可能となるという作用効果を奏する。ひいては、全パルスを送信する時間に制限がある場合においても、ステップ周波数を高く設定することが可能となるため、距離分解能が向上する。また、実施の形態6の雑音・クラッタ電力推定処理およびフィルタパラメータ演算処理を用いることにより信号対雑音クラッタ電力比を最大にすることができるという作用効果も奏する。
【0091】
なお、フィルタパラメータ演算処理器20および雑音・クラッタ電力推定処理器22は、実施の形態2〜4の構成に追加し、雑音・クラッタ電力推定処理器22の出力であるCNRを、実施の形態2〜4の構成に追加したフィルタパラメータ演算処理器20に出力するようにしても良い。
【0092】
また、上述の実施の形態5、6によるレーダ装置において、距離計測条件に応じて、フィルタパラメータ演算処理器20が式(8)の変数ηを0≦η≦1の範囲で可変させ、フィルタ処理器B13に出力し設定するようにすることも可能である。例えば、クラッタ電力は十分に小さく距離分解能は要求されずSNRを最大にしたい距離計測条件ではη=0と設定し、クラッタ電力は十分に小さく距離分解能を最大にしたい距離計測条件ではη=1と設定し、SNCRを最大にしたい距離計測条件ではη=ηoptと設定し、あるいは、距離分解能、SNRおよび/またはSNCR等に応じて0≦η≦1の範囲内で設定するようにしても良い。これにより、例えば計測環境の変化に適応して、好適なレーダの諸元を柔軟に実現することができるという作用効果を奏する。このとき、パルス数Nを1とすることで、すなわち合成帯域数を1とすることで、通常のパルスレーダとして機能させることももちろん可能である。
【符号の説明】
【0093】
1 任意周波数発振器
2 基準中間周波数信号発振器
3a、3b 周波数変換機
4 送信機
5 送受切替器
6 アンテナ
7 増幅器
8 分配器
9a、9b 位相検波器
10 90度ハイブリッド器
11a、11b フィルタ処理器A
12a、12b A/D変換器
13 フィルタ処理器B
14 合成帯域処理器
15 包絡線検波器
16 追尾処理器
17 ヌル点内挿処理器
18 0詰め処理器
19 周波数シフト処理器
20 フィルタパラメータ演算処理器
21 ビデオ信号保存装置
22 雑音・クラッタ電力推定処理器
【特許請求の範囲】
【請求項1】
ステップ周波数ずつ周波数が異なる受信パルス信号に基づく合成帯域処理により距離計測を行うレーダ装置であって、
前記合成帯域処理が行われる前記受信パルス信号のスペクトルの帯域外の成分を強調する帯域外成分強調フィルタ処理を行うフィルタ処理器と、
を備えたことを特徴とするレーダ装置。
【請求項2】
前記ステップ周波数は、前記帯域外成分強調フィルタ処理前の前記受信パルス信号の周波数帯域より大きく、前記帯域外成分強調フィルタ処理後の前記受信パルス信号の周波数帯域以下であることを特徴とする請求項1に記載のレーダ装置。
【請求項3】
W(f)を前記帯域外成分強調フィルタ処理の周波数特性とし、S(f)を前記受信パルス信号のスペクトルとし、Kを規格化定数とし、ηをフィルタパラメータとし、S*(f)をS(f)の複素共役とするとき、
W(f) = K・S*(f)/{(1−η)+η・|S(f)|2}、0<η≦1
で表されることを特徴とする請求項1または請求項2に記載のレーダ装置。
【請求項4】
合成帯域数が1であることを特徴とする請求項1〜請求項3のいずれかに記載のレーダ装置。
【請求項5】
前記帯域外成分強調フィルタ処理が行われた前記受信パルス信号のスペクトルのヌル点を前後のデータから内挿するヌル点内挿処理を行うヌル点内挿処理器と、
を備えたことを特徴とする請求項1〜請求項4のいずれかに記載のレーダ装置。
【請求項6】
前記帯域外成分強調フィルタ処理が行われる前記受信パルス信号の後ろに0を詰める0詰め処理を行う0詰め処理器と、
を備えたことを特徴とする請求項1〜請求項5のいずれかに記載のレーダ装置。
【請求項7】
前記帯域外成分強調フィルタ処理が行われる前記受信パルス信号の周波数をシフトさせる周波数シフト処理を行う周波数シフト処理器と、
を備えたことを特徴とする請求項1〜請求項6のいずれかに記載のレーダ装置。
【請求項8】
信号対雑音クラッタ電力比に基づいて前記帯域外成分強調フィルタ処理で用いるフィルタパラメータを演算により求め、この求めたフィルタパラメータを前記フィルタ処理器に設定するフィルタパラメータ演算処理器と、
を備えたことを特徴とする請求項1〜請求項7のいずれかに記載のレーダ装置。
【請求項9】
前記フィルタパラメータを求める演算で用いる雑音電力およびクラッタ電力を推定する雑音・クラッタ電力推定処理を行う雑音・クラッタ電力推定処理器と、
を備えたことを特徴とする請求項8に記載のレーダ装置。
【請求項10】
受信パルス信号に基づいて距離計測を行うレーダ装置であって、
距離計測に用いる前記受信パルス信号に対し、周波数特性をW(f)とし、S(f)を前記受信パルス信号のスペクトルとし、Kを規格化定数とし、ηをフィルタパラメータとし、S*(f)をS(f)の複素共役とするとき、
W(f) = K・S*(f)/{(1−η)+η・|S(f)|2}、0≦η≦1
で表されるフィルタ処理を行うフィルタ処理器と、
距離計測条件に応じて前記フィルタパラメータを求め、この求めたフィルタパラメータを前記フィルタ処理器に設定するフィルタパラメータ演算処理器と、
を備えたことを特徴とするレーダ装置。
【請求項1】
ステップ周波数ずつ周波数が異なる受信パルス信号に基づく合成帯域処理により距離計測を行うレーダ装置であって、
前記合成帯域処理が行われる前記受信パルス信号のスペクトルの帯域外の成分を強調する帯域外成分強調フィルタ処理を行うフィルタ処理器と、
を備えたことを特徴とするレーダ装置。
【請求項2】
前記ステップ周波数は、前記帯域外成分強調フィルタ処理前の前記受信パルス信号の周波数帯域より大きく、前記帯域外成分強調フィルタ処理後の前記受信パルス信号の周波数帯域以下であることを特徴とする請求項1に記載のレーダ装置。
【請求項3】
W(f)を前記帯域外成分強調フィルタ処理の周波数特性とし、S(f)を前記受信パルス信号のスペクトルとし、Kを規格化定数とし、ηをフィルタパラメータとし、S*(f)をS(f)の複素共役とするとき、
W(f) = K・S*(f)/{(1−η)+η・|S(f)|2}、0<η≦1
で表されることを特徴とする請求項1または請求項2に記載のレーダ装置。
【請求項4】
合成帯域数が1であることを特徴とする請求項1〜請求項3のいずれかに記載のレーダ装置。
【請求項5】
前記帯域外成分強調フィルタ処理が行われた前記受信パルス信号のスペクトルのヌル点を前後のデータから内挿するヌル点内挿処理を行うヌル点内挿処理器と、
を備えたことを特徴とする請求項1〜請求項4のいずれかに記載のレーダ装置。
【請求項6】
前記帯域外成分強調フィルタ処理が行われる前記受信パルス信号の後ろに0を詰める0詰め処理を行う0詰め処理器と、
を備えたことを特徴とする請求項1〜請求項5のいずれかに記載のレーダ装置。
【請求項7】
前記帯域外成分強調フィルタ処理が行われる前記受信パルス信号の周波数をシフトさせる周波数シフト処理を行う周波数シフト処理器と、
を備えたことを特徴とする請求項1〜請求項6のいずれかに記載のレーダ装置。
【請求項8】
信号対雑音クラッタ電力比に基づいて前記帯域外成分強調フィルタ処理で用いるフィルタパラメータを演算により求め、この求めたフィルタパラメータを前記フィルタ処理器に設定するフィルタパラメータ演算処理器と、
を備えたことを特徴とする請求項1〜請求項7のいずれかに記載のレーダ装置。
【請求項9】
前記フィルタパラメータを求める演算で用いる雑音電力およびクラッタ電力を推定する雑音・クラッタ電力推定処理を行う雑音・クラッタ電力推定処理器と、
を備えたことを特徴とする請求項8に記載のレーダ装置。
【請求項10】
受信パルス信号に基づいて距離計測を行うレーダ装置であって、
距離計測に用いる前記受信パルス信号に対し、周波数特性をW(f)とし、S(f)を前記受信パルス信号のスペクトルとし、Kを規格化定数とし、ηをフィルタパラメータとし、S*(f)をS(f)の複素共役とするとき、
W(f) = K・S*(f)/{(1−η)+η・|S(f)|2}、0≦η≦1
で表されるフィルタ処理を行うフィルタ処理器と、
距離計測条件に応じて前記フィルタパラメータを求め、この求めたフィルタパラメータを前記フィルタ処理器に設定するフィルタパラメータ演算処理器と、
を備えたことを特徴とするレーダ装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】

【図16】
【図17】
【図18】
【図19】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2012−255723(P2012−255723A)
【公開日】平成24年12月27日(2012.12.27)
【国際特許分類】
【出願番号】特願2011−129221(P2011−129221)
【出願日】平成23年6月9日(2011.6.9)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成24年12月27日(2012.12.27)
【国際特許分類】
【出願日】平成23年6月9日(2011.6.9)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]