
レーダ装置
【課題】従来はレーダ装置が車両の進行方向のターゲットの高さを算出するために所定の演算処理時間がかかっていた。この演算処理時間による遅れ時間を解消し、より迅速な警報指令の送信を可能にする。
【解決手段】演算処理器26は、予め定めた検出範囲においてターゲット32の反射波42の強度の極小点を検知したときに警報器に対して警報指令を送る。検出範囲における強度の極小点の有無に基づいて警報指令の要否を判定することにより、従来よりも迅速に警報指令の要否判定を行うことが可能となる。
【解決手段】演算処理器26は、予め定めた検出範囲においてターゲット32の反射波42の強度の極小点を検知したときに警報器に対して警報指令を送る。検出範囲における強度の極小点の有無に基づいて警報指令の要否を判定することにより、従来よりも迅速に警報指令の要否判定を行うことが可能となる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両等に搭載され、進行方向の障害物や先行車両を検知するレーダ装置に関する。
【背景技術】
【0002】
従来から、車両の進行方向の障害物、先行車両の検知や、当該障害物や先行車両との相対距離を求めるために、車両にレーダ装置が搭載されている。
【0003】
レーダ装置は車両のフロント部に搭載されており、レーダ装置の送信アンテナから車両の進行方向に向かって送信波が出力される。送信波が先行車両や障害物等に当たって反射すると、その反射波はレーダ装置の受信アンテナに受信される。ここで、先行車両や障害物等の反射源を以下ではターゲットと総称する。
【0004】
反射波が受信アンテナに受信された後、レーダ装置内の演算処理器は送信波と反射波のずれ(遅延時間)に基づいて車両とターゲットの相対距離を算出する。また、演算処理器は警報器と接続しており、相対距離の算出の結果、ターゲットが車両に近接し、衝突の可能性があると判断された場合には警報器に警報指令を送る。警報指令を受けた警報器が警報を鳴らしたり、警告メッセージを表示することによりドライバーに車両の減速や障害物や先行車両からの回避を促している。
【0005】
警報指令を送るに当たり、ターゲットの高さが低く、車両が容易に乗り越えることができる場合、例えばターゲットが路上鉄板である場合には車両がターゲットに衝突することはないので警報器に警報指令を送る必要はない。したがって、ターゲットを検知したときに当該ターゲットの高さを求め、その上で警報指令の要否を決定している。
【0006】
ターゲットの高さを求める手法として、反射波の強度(振幅)を利用する手法が従来から知られている。反射波の強度は車両とターゲットの相対距離によって変動することが知られており、さらにこの変動の傾向はターゲットの高さによって異なることが知られている。そこで特許文献1においては、レーダ装置とターゲットの相対距離に対する反射波の強度の軌跡を予め実験等により取得し、さらにこの軌跡をターゲットの高さ別に取得し、この高さ別軌跡データをレーダ装置のメモリに記憶させている。そして、車両運転中にレーダ装置が検知した反射波の強度の軌跡とメモリに記憶されている複数個の高さ別軌跡データとを比較し(パターンマッチングし)、メモリに記憶された高さ別軌跡データの中から、レーダ装置が検知した反射波の軌跡との差異が最小である軌跡データを抽出し、当該軌跡データに対応するターゲットの高さをレーダ装置が検知したターゲットの高さと推定している。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2008−122391号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
従来技術においてはパターンマッチングを行うための演算処理時間を必要とする。つまり、警報器に警報指令が送信されるまでには演算処理時間分の遅れ時間が発生し、その分ターゲットを回避するための時間が短くなるという問題があった。
【0009】
そこで本発明は、パターンマッチング等の演算処理時間を省いて迅速に警報指令の要否を判断することのできるレーダ装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
本願発明は、送信波を発振する発振器と、送信波を出力する送信アンテナと、ターゲットからの反射波を受信する受信アンテナと、反射波の強度を算出するとともに、ターゲットまでの相対距離を求める演算処理器と、を備えたレーダ装置に関するものである。演算処理器には、相対距離について検出範囲が予め設定され、演算処理器は、相対距離に対する反射波の強度が、検出範囲において極小点を有するときに所定の処理を行う。
【0011】
また、上記発明において、演算処理器は、検出範囲における強度の極小点の個数に基づいてターゲットの高さを算出することが好適である。
【0012】
また、上記発明において、演算処理器は、検出範囲における強度の極小点に対応する相対距離の値に基づいてターゲットの高さを算出することが好適である。
【0013】
また、上記発明において、レーダ装置は車両に搭載され、車両の最低高さ未満のターゲットについては極小点が検出されず、かつ、車両の最低高さ以上のターゲットについて極小点が検出されるように検出範囲が定められていることが好適である。
【0014】
また、上記発明において、受信アンテナに入射した反射波の入射角を求め、予め定めた水平方向の入射角範囲外の反射波を排除することにより反射波のノイズ除去を行う、角度検出器を備えることが好適である。
【発明の効果】
【0015】
上述のように、本願発明に係るレーダ装置は、従来技術におけるパターンマッチングのための演算処理時間を省くことが可能となり、その分迅速に警報の要否判断を行うことができる。
【図面の簡単な説明】
【0016】
【図1】本実施形態に係るレーダ装置を例示する図である。
【図2】送信波の波形を例示する図である。
【図3】直接反射波と間接反射波とを例示する図である。
【図4】反射波の入射角を絞る手段を例示する図である。
【図5】車両とターゲットとの相対距離を求める方法を説明する図である。
【図6】車両とターゲットとの相対距離を求める方法を説明する図である。
【図7】ターゲットの高さを変更させたときの、反射波強度の軌跡を示す図である。
【図8】警報指令の要否判定のフローチャートを示す図である。
【図9】車両とターゲットとの相対距離と、ターゲットの高さとの関係を示す図である。
【図10】警報指令の要否判定のフローチャートを示す図である。
【発明を実施するための形態】
【0017】
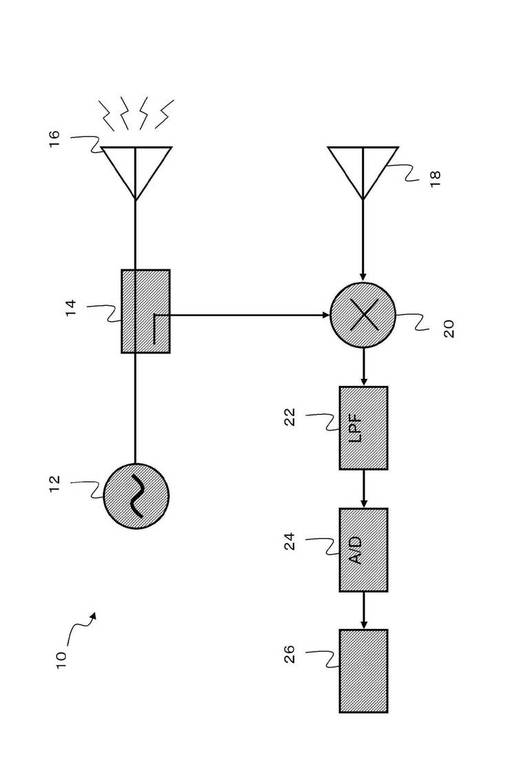
本実施形態に係るレーダ装置の構成について、図1を用いて説明する。レーダ装置10は図示しない車両のフロント部に搭載される。レーダ装置10はFM−CW(Frequency−Modulated Continuous Waves)方式のレーダであり、FM波を出力するために周波数可変の発振器12を備えている。発振器12は分配器14を経て送信アンテナ16に接続される。さらにレーダ装置10は受信アンテナ18を備え、受信アンテナ18はミキサ20に接続している。ミキサ20は上述した分配器14にも接続され、さらにローパスフィルタを有するフィルタ回路22にも接続されている。フィルタ回路22はA/D変換器24に接続され、さらにA/D変換器24は演算処理器26に接続されている。
【0018】
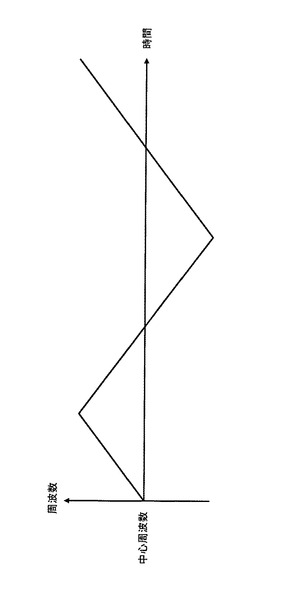
次に、レーダ装置10の各構成の作用について説明する。発振器12は発振周波数を変調させながらFM波である送信波を生成する。具体的には図2のように送信波の波形が三角状になるように送信波を変調させる。なお、本実施例においては、送信波がミリ波(波長1mm〜10mm)となるように、発振器12の発振周波数の帯域を周波数30GHz〜300GHzに設定している。図2においては76GHzを中心周波数として0.3GHzの幅(片幅0.15GHz)で発振周波数を変調させている。
【0019】
送信アンテナ16は発振器12により生成された送信波を出力する。なお、本実施形態においては、車両の進行方向から大きく外れたターゲットからの反射を防ぐために、送信アンテナ16は送信波の出力角を所定の角度に絞っている。本実施形態においては送信波の出力角を水平方向、垂直方向ともに7.0〜7.5°となるように設定している。こうすることにより、例えばレーダ装置10(したがって車両のフロント部)から50m離れた場所においても送信波の水平方向の幅は約3.0mから3.2mの範囲に収まる。
【0020】
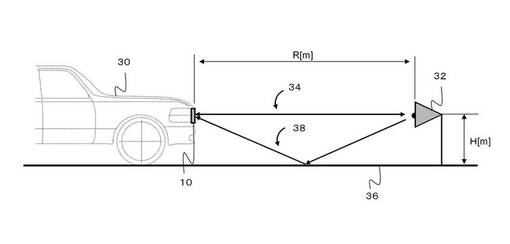
図3に示すように、車両30の進行方向に先行車両や障害物等のターゲット32がある場合には送信波がターゲット32で反射する。この反射波を受信アンテナ18が受信する。ここで、反射波はターゲット32から直接受信アンテナ18に向かう直接反射波34と、ターゲット32から路面36に一度反射した後に受信アンテナ18に向かう間接反射波38とに分けられる。受信アンテナ18は直接反射波34と間接反射波38との合成波を反射波として受信する。直接反射波34と間接反射波38とはターゲット32から受信アンテナ18までの経路長が異なるため、直接反射波34と間接反射波38とは互いに干渉し合い、干渉の度合いによって両者を合成した反射波の強度(振幅)Iは増減する。干渉の度合いはターゲット32から受信アンテナ18までの経路長によって変化する。すなわち、ターゲット32の高さH、および受信アンテナ18とターゲット32との相対距離Rによって反射波の強度Iは変化する。
【0021】
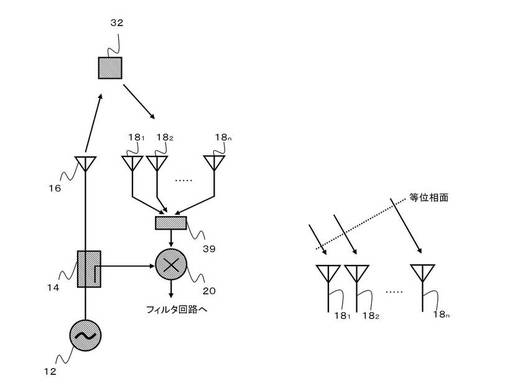
なお、直接反射波34と間接反射波38の他にも、路上に設けられた交通量測定のための路側器等からの信号や、進行方向からみて側方にあるガードレール等からの反射波が受信アンテナ18に受信され得る。そこで、直接反射波34と間接反射波38以外の信号を排除するために、受信アンテナ18に入射する信号の入射角を限定する手段を受信アンテナ18に備えても良い。具体的には図4に示すように、受信アンテナ18−1〜18−nを水平方向に複数個並べるとともに、受信アンテナ18−1〜18−nに接続し、これらの信号を受ける角度検出器39を設ける。角度検出器は周知のMUSIC(Multiple−Signal−Classification)法やESPRIT(Estimation−od−Signal−Parameters−via−Rotational−Invariance−Techniques)法などの演算を行うことにより受信アンテナ18−1〜18−nに入射した受信信号の入射角を算出する。本実施形態では、角度検出器39の図示しないメモリに、受信アンテナ18−1〜18−nに入射する反射波の水平方向における入射角範囲を定める入射角条件(例えば、車両の進行方向に平行な角度を0°として、水平方向について入射角を±5°以内に限定)を記憶させている。角度検出器39が各受信アンテナ18−1〜18−nから信号を受信すると、角度検出器39は受信アンテナ18−1〜18−nに入射した受信信号の入射角と入射角条件とを比較する。もし、入射角が入射角条件で定める角度よりも大きければ角度検出器39は当該受信信号を排除する。他方、入射角が入射角条件を満足すれば角度検出器39は当該受信信号をミキサ20に送信する。
【0022】
図1に戻り、受信アンテナ18により受信された反射波はミキサ20に送られる。ミキサ20は分配器14にも接続されており、発振器12からの送信波がこの分配器14からミキサ20に送られる。
【0023】
ミキサ20では送信波40と反射波42とをミキシングしたビート信号を生成する。ビート信号とは、送信波40と反射波42との周波数の違いから生じるビート(うなり)の信号を指しており、送信波40に対する反射波42の遅延時間(時間ずれ)によって生じる。このビート信号はフィルタ回路22を経てA/D変換器24によりデジタル信号に変換され、演算処理器26に送られる。演算処理器26はビート信号に基づいてターゲット32と車両30との相対距離Rを算出する。
【0024】
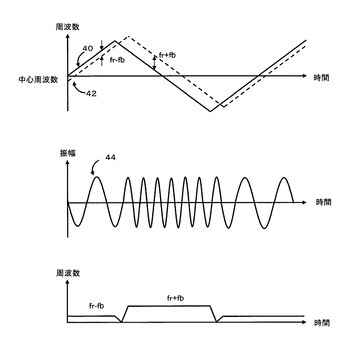
ビート信号から車両30とターゲット32の相対距離Rを求める方法について、以下に説明する。車両30は走行中であることから、ドプラ効果の影響を受けて図5上段に示すように反射波42は送信波40に対して縦軸(周波数)方向にオフセットする。このオフセットの量は、frをビート周波数、fbをドプラ周波数とすると、半周期ごとにfr+fbからfr−fbに変化する。これを受けて、図5中段および下段に示すように、送信波40と反射波42とを混合させたビート信号44の周波数も半期ごとにfr+fbからfr−fbに切り替わる。この現象を利用して、ビート信号44を高速フーリエ変換(FFT)等により周波数成分に変換してfr+fbとfr−fbの値を求めることにより、ビート周波数frを求めることができる。
【0025】
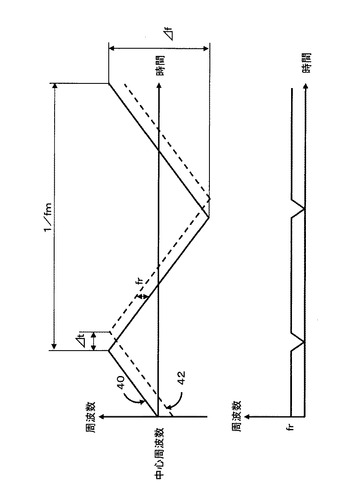
ドプラ効果を取り除いたときの送信波40と反射波42の波形を図6上段に示す。またこのときのビート信号44の周波数変化を図6下段に示す。図6上段に示すように、送信波40と反射波42との間には遅延時間△tが生じている。送信波40と反射波42の伝搬速度をc(例えば光の速度:3×108m/s)とすると、車両30とターゲット32との相対距離(半径距離)Rは下記数式1により表される。
【0026】
【数1】

【0027】
さらに、送信波40の変調繰り返し周期(既知)を1/fm、変調周波数幅(既知)を△fとすると、図6上段の幾何的関係から、下記数式2が導出される。
【0028】
【数2】
【0029】
数式1と数式2より、下記数式3が導出される。数式3により、相対距離Rを求めることができる。
【0030】
【数3】
【0031】
演算処理器26は上述した演算を行うことにより車両30とターゲット32との相対距離Rを求める。
【0032】
また、演算処理器26は車両30とターゲット32との相対距離Rを求めると同時に、反射波42の信号強度(振幅)Iも取得している。取得した強度Iは相対距離Rと対応付けて図示しないメモリに記憶される。
【0033】
上述したように、反射波の信号強度Iは、ターゲット32の相対距離Rおよびターゲット32の高さhによって異なる値を取る。本実施形態においては、相対距離Rおよびターゲット32の高さhを種々変更させたときの反射波の信号強度Iをシミュレーションによって予測し、この予測結果と、相対距離R及び反射波の信号強度Iとから、ターゲット32の高さhを推定している。
【0034】
反射波の信号強度Iは、直接反射波34の強度Ir1と間接反射波38の強度Ir2とを合成値として表わすことができる。直接反射波34の強度Ir1は下記数式4にて表すことができる。
【0035】
【数4】
【0036】
ただし、Pr1は直接反射波34の受信電力、f1は直接反射波34のビート周波数を表わしている。また、Ptは送信電力、Gは利得、λは波長、σはレーダ反射面積(Radar Cross Section、RCS)、Rは車両30とターゲット32との相対距離を表わしている。
【0037】
また、間接反射波38の強度Ir2は下記数式5にて表すことができる。
【0038】
【数5】
【0039】
ただし、Pr2は間接反射波38の受信電力、f2は間接反射波38のビート周波数を表わしている。また、Aは路面反射係数、hはターゲット32の高さを表わしている。さらに、φは直接反射波34と間接反射波38の位相差、cはミリ波の伝搬速度を表わしている。数式4、5から、反射波42の信号強度Iは以下の数式6のように表わすことができる。
【0040】
【数6】
【0041】
数式4〜6を用いたシミュレーションの結果を図7に示す。図7では、相対距離Rの範囲(以下、この範囲を検出範囲と呼ぶ)を区切り、当該検出範囲内においてターゲット32の高さhを種々変更させたときの反射波42の強度Iの軌跡が示されている。ここでは検出範囲はR=30mからR=40mの範囲とした。また、シミュレーションに当たり、ターゲット32の最低高さを0.1mとし、それから0.1m刻みでターゲット32の高さhを上げていき、最高高さを1.0mとした。また、送信波の中心周波数を76GHzとした。また、送信電力Ptは10dBmとし、利得Gは20dBi、レーダ反射面積σは10dBsmとした。
【0042】
図7を参照すると、ターゲット32の高さhが0.1mの時には強度Iの軌跡には極小点が表れていないが、ターゲット32の高さhが0.2mになると相対距離R=38mの地点に強度Iの極小点が表れる。以下高さhが0.2m以上のターゲット32にはすべて極小点が表れていることが理解される。
【0043】
ここで、図7から、ターゲット32が低くなるにつれて極小点の位置が検出範囲の最小値(R=30)から最大値(R=40)側にドリフトしていることが理解される。したがって、当該検出範囲においては検出範囲の最大値に極小点が表れるターゲット32の高さhが検出しうる最小高さということになる。図7から、ターゲット32の高さhが0.2mのときに相対距離R=38mの地点に極小値が表われ、かつ、ターゲットの高さhが0.1mのときには極小値が表われていないことから、検出範囲内において極小値が表われ得るターゲット32の最小高さは0.1mから0.2mの間であることが理解される。一般的に地上から車両30の床下までの高さである最低高さが0.2m以下に設計されていることを考慮すると、この最小高さよりも低いターゲット32は車両が十分に乗り越えられる高さである。したがって当該検出範囲において極小点が検出されなければ警報指令を送る必要はなく、また極小点が検出されれば警報指令を警報器に送らなければならないことが理解される。このように予めシミュレーションにより、車両が乗り越えられる限界高さhL未満のターゲットについては極小点が検出されず、かつ、車両の限界高さhL以上のターゲットについて極小点が検出されるように検出範囲を定めることができる。
【0044】
演算処理器26には上述した検出範囲が予め設定されている。演算処理器26は、実際の車両30とターゲットとの相対距離Rおよび反射波強度Iを求め、相対距離Rの値が上述した検出範囲に含まれるときには相対距離Rに対応する反射波強度Iの軌跡を監視する。さらに当該軌跡における極小点の有無を検出する。極小点の有無を検知することにより、反射波の反射源であるターゲット32の高さが、車両30が乗り越えることのできる高さか否かを判定することができる。さらにその判定結果に基づいて警報指令の要否を決定することができる。
【0045】
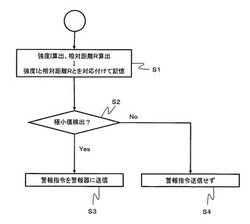
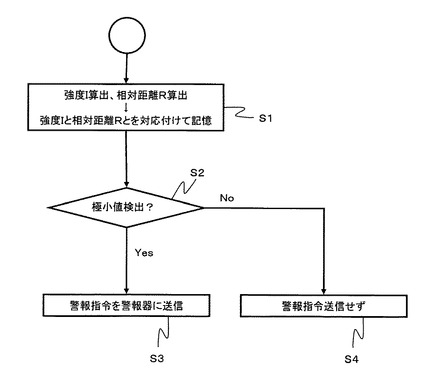
上述した判定処理を演算処理器26に実行させるためのフローチャートを図8に示す。まず、演算処理器26は反射波42の強度Iを算出するともに、当該強度Iを車両30とターゲット32との相対距離Rに対応付けて図示しないメモリ等に記憶する(S1)。このとき、メモリの記憶容量を軽減させるために、検出範囲外の強度Iは記憶しない(捨てる)ように設定しても良い。
【0046】
次に、予め定めた検出範囲における強度Iの軌跡について極小点が検知されたか否かを判定する(S2)。具体的には、I(x)を区間xにおける強度とすると、I(x)<I(x−△x)かつI(x)<I(x+△x)との条件を満たすI(x)を極小点と判定する。
【0047】
上述した条件を満たす強度I(x)が検出範囲内に表れたときには、演算処理器26は直ちに演算処理器26に接続された警報器(図示せず)に警報指令を送る(S3)。これによりドライバーに車両の減速やターゲット32からの回避を促す。また、検出範囲内に極小点が検出されない場合には演算処理器26は警報器には警報指令を送らない(S4)。なお、(S3)において警報器に警報指令を送ることに加えて、もしくはこれに代えて、車両の制御を行うコントロールユニットに対して警報指令を送って車両を減速させたり、シートベルトの張力(テンション)を増加させるようにしても良い。
【0048】
このように、本実施形態においては検出範囲を予め定めておき、当該検出範囲における強度Iの極小点の有無に基づいて警報の要否を判定している。したがって、警報の要否判定に際して従来技術のような軌跡のパターンマッチングを行う必要がなくなり、パターンマッチングのための演算処理時間を省くことが可能となる。この結果従来よりも迅速に警報の要否を判定することができる。
【0049】
なお、図8のフローチャートにおいては極小点の有無により警報要否を判定していたが、検出範囲内の軌跡を全て求め、検出範囲における極小点の個数やその位置に基づいてターゲット32の高さhを判定し、その後に警報要否を決定するようにしても良い。
【0050】
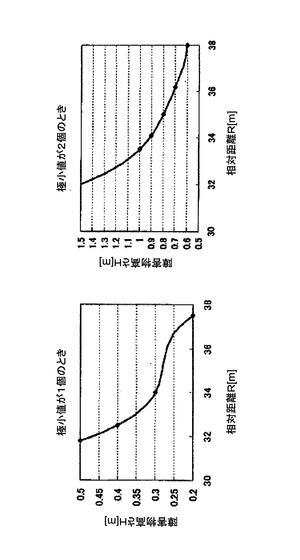
図7に示すように、ターゲット32が高くなるにつれて強度Iの極小点の表れる地点が検出範囲の最大値(R=40m)から最小値(R=30m)に向かって徐々にドリフトする。つまり、極小点に対応する相対距離Rの値が小さくなるほどターゲット32は高くなる。
【0051】
また、ターゲット32が高くなるにつれて検出範囲内の極小点の個数が増える。図7においてはターゲット32の高さが0.2m〜0.5mの範囲においては極小点が1個であるが、0.6m〜1.0mでは極小点が2個となる。
【0052】
ここで、図9の左側のグラフは極小点が1個であったときの極小点のドリフトの様子を示し、図9の右側のグラフは極小点が2個であったときの、検出範囲における最大値(R=40m)側の極小点のドリフトの様子を示している。これらのグラフと極小点の個数および極小点の位置とを参照することにより、ターゲット32の高さを求め、さらに警報指令の要否を判定することができる。
【0053】
図10には上記判定を演算処理器26が行うためのフローチャートが示されている。まず、演算処理器26は反射波42の強度Iを算出するともに、当該強度Iを車両30とターゲット32との相対距離Rに対応付けて記憶する。この処理を全検出範囲にわたって行う(S5、S6)。次に、演算処理器26は検出範囲における強度Iの極小点を計測する(S7)。極小点が検出されなければ(カウントされなければ)警報器に警報指令を送らない(S8)。一方、極小点が検出されると、当該極小点の個数を判定する(S9)。極小点の個数が1個の場合は、当該極小点に対する相対距離Rの値を抽出し、図視しないメモリに記憶された図9左側のグラフ、またはこのグラフに対応する表に照らしてターゲット32の高さhを同定する(S10)。極小点の個数が2個の場合は、当該2個の極小点のうち、最大値(R=40m)側の極小点に対する相対距離Rの値を抽出し、図視しないメモリに記憶された図9右側のグラフ、またはこのグラフに対応する表に照らしてターゲット32の高さhを同定する(S11)。次に、S10またはS11から求められたターゲット32の高さhと、予め設定され図示しないメモリ等に記憶された閾値とを比較する(S12)。ターゲット32の高さhが閾値を超える場合には、演算処理器26は警報器に警報指令を送る(S13)。ターゲット32の高さhが閾値以下である場合には警報指令を送らない(S14)。
【0054】
極小点の個数カウントおよび当該極小点に対応する検出範囲の値の抽出は従来技術のパターンマッチングに比べて演算時間が極めて短いので、図10にて例示した判定処理を実行することにより、警報要否判定を従来よりも迅速に行うことができる。
【0055】
なお、ターゲット32の高さとして想定しうる高さが0.5m以下である場合は検出範囲における極小点は1個から増加することはないので、極小点のドリフト傾向のみからターゲット32の高さ検出を行っても良い。また、ターゲット32の高さ検出が、極小点0個(0〜0.2m)極小点1個(0.2m〜0.5m)、極小点2個(0.5m〜1.0m以下)の3段階検出で足りる場合には、極小点の個数計測のみによってターゲット32の高さ検出を行っても良い。
【符号の説明】
【0056】
10 レーダ装置、12 発振器、14 分配器、16 送信アンテナ、18 受信アンテナ、20 ミキサ、22 フィルタ回路、24 A/D変換器、26 演算処理器、30 車両、32 ターゲット、34 直接反射波、36 路面、38 間接反射波、40 送信波、42 反射波、44 ビート信号。
【技術分野】
【0001】
本発明は、車両等に搭載され、進行方向の障害物や先行車両を検知するレーダ装置に関する。
【背景技術】
【0002】
従来から、車両の進行方向の障害物、先行車両の検知や、当該障害物や先行車両との相対距離を求めるために、車両にレーダ装置が搭載されている。
【0003】
レーダ装置は車両のフロント部に搭載されており、レーダ装置の送信アンテナから車両の進行方向に向かって送信波が出力される。送信波が先行車両や障害物等に当たって反射すると、その反射波はレーダ装置の受信アンテナに受信される。ここで、先行車両や障害物等の反射源を以下ではターゲットと総称する。
【0004】
反射波が受信アンテナに受信された後、レーダ装置内の演算処理器は送信波と反射波のずれ(遅延時間)に基づいて車両とターゲットの相対距離を算出する。また、演算処理器は警報器と接続しており、相対距離の算出の結果、ターゲットが車両に近接し、衝突の可能性があると判断された場合には警報器に警報指令を送る。警報指令を受けた警報器が警報を鳴らしたり、警告メッセージを表示することによりドライバーに車両の減速や障害物や先行車両からの回避を促している。
【0005】
警報指令を送るに当たり、ターゲットの高さが低く、車両が容易に乗り越えることができる場合、例えばターゲットが路上鉄板である場合には車両がターゲットに衝突することはないので警報器に警報指令を送る必要はない。したがって、ターゲットを検知したときに当該ターゲットの高さを求め、その上で警報指令の要否を決定している。
【0006】
ターゲットの高さを求める手法として、反射波の強度(振幅)を利用する手法が従来から知られている。反射波の強度は車両とターゲットの相対距離によって変動することが知られており、さらにこの変動の傾向はターゲットの高さによって異なることが知られている。そこで特許文献1においては、レーダ装置とターゲットの相対距離に対する反射波の強度の軌跡を予め実験等により取得し、さらにこの軌跡をターゲットの高さ別に取得し、この高さ別軌跡データをレーダ装置のメモリに記憶させている。そして、車両運転中にレーダ装置が検知した反射波の強度の軌跡とメモリに記憶されている複数個の高さ別軌跡データとを比較し(パターンマッチングし)、メモリに記憶された高さ別軌跡データの中から、レーダ装置が検知した反射波の軌跡との差異が最小である軌跡データを抽出し、当該軌跡データに対応するターゲットの高さをレーダ装置が検知したターゲットの高さと推定している。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2008−122391号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
従来技術においてはパターンマッチングを行うための演算処理時間を必要とする。つまり、警報器に警報指令が送信されるまでには演算処理時間分の遅れ時間が発生し、その分ターゲットを回避するための時間が短くなるという問題があった。
【0009】
そこで本発明は、パターンマッチング等の演算処理時間を省いて迅速に警報指令の要否を判断することのできるレーダ装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
本願発明は、送信波を発振する発振器と、送信波を出力する送信アンテナと、ターゲットからの反射波を受信する受信アンテナと、反射波の強度を算出するとともに、ターゲットまでの相対距離を求める演算処理器と、を備えたレーダ装置に関するものである。演算処理器には、相対距離について検出範囲が予め設定され、演算処理器は、相対距離に対する反射波の強度が、検出範囲において極小点を有するときに所定の処理を行う。
【0011】
また、上記発明において、演算処理器は、検出範囲における強度の極小点の個数に基づいてターゲットの高さを算出することが好適である。
【0012】
また、上記発明において、演算処理器は、検出範囲における強度の極小点に対応する相対距離の値に基づいてターゲットの高さを算出することが好適である。
【0013】
また、上記発明において、レーダ装置は車両に搭載され、車両の最低高さ未満のターゲットについては極小点が検出されず、かつ、車両の最低高さ以上のターゲットについて極小点が検出されるように検出範囲が定められていることが好適である。
【0014】
また、上記発明において、受信アンテナに入射した反射波の入射角を求め、予め定めた水平方向の入射角範囲外の反射波を排除することにより反射波のノイズ除去を行う、角度検出器を備えることが好適である。
【発明の効果】
【0015】
上述のように、本願発明に係るレーダ装置は、従来技術におけるパターンマッチングのための演算処理時間を省くことが可能となり、その分迅速に警報の要否判断を行うことができる。
【図面の簡単な説明】
【0016】
【図1】本実施形態に係るレーダ装置を例示する図である。
【図2】送信波の波形を例示する図である。
【図3】直接反射波と間接反射波とを例示する図である。
【図4】反射波の入射角を絞る手段を例示する図である。
【図5】車両とターゲットとの相対距離を求める方法を説明する図である。
【図6】車両とターゲットとの相対距離を求める方法を説明する図である。
【図7】ターゲットの高さを変更させたときの、反射波強度の軌跡を示す図である。
【図8】警報指令の要否判定のフローチャートを示す図である。
【図9】車両とターゲットとの相対距離と、ターゲットの高さとの関係を示す図である。
【図10】警報指令の要否判定のフローチャートを示す図である。
【発明を実施するための形態】
【0017】
本実施形態に係るレーダ装置の構成について、図1を用いて説明する。レーダ装置10は図示しない車両のフロント部に搭載される。レーダ装置10はFM−CW(Frequency−Modulated Continuous Waves)方式のレーダであり、FM波を出力するために周波数可変の発振器12を備えている。発振器12は分配器14を経て送信アンテナ16に接続される。さらにレーダ装置10は受信アンテナ18を備え、受信アンテナ18はミキサ20に接続している。ミキサ20は上述した分配器14にも接続され、さらにローパスフィルタを有するフィルタ回路22にも接続されている。フィルタ回路22はA/D変換器24に接続され、さらにA/D変換器24は演算処理器26に接続されている。
【0018】
次に、レーダ装置10の各構成の作用について説明する。発振器12は発振周波数を変調させながらFM波である送信波を生成する。具体的には図2のように送信波の波形が三角状になるように送信波を変調させる。なお、本実施例においては、送信波がミリ波(波長1mm〜10mm)となるように、発振器12の発振周波数の帯域を周波数30GHz〜300GHzに設定している。図2においては76GHzを中心周波数として0.3GHzの幅(片幅0.15GHz)で発振周波数を変調させている。
【0019】
送信アンテナ16は発振器12により生成された送信波を出力する。なお、本実施形態においては、車両の進行方向から大きく外れたターゲットからの反射を防ぐために、送信アンテナ16は送信波の出力角を所定の角度に絞っている。本実施形態においては送信波の出力角を水平方向、垂直方向ともに7.0〜7.5°となるように設定している。こうすることにより、例えばレーダ装置10(したがって車両のフロント部)から50m離れた場所においても送信波の水平方向の幅は約3.0mから3.2mの範囲に収まる。
【0020】
図3に示すように、車両30の進行方向に先行車両や障害物等のターゲット32がある場合には送信波がターゲット32で反射する。この反射波を受信アンテナ18が受信する。ここで、反射波はターゲット32から直接受信アンテナ18に向かう直接反射波34と、ターゲット32から路面36に一度反射した後に受信アンテナ18に向かう間接反射波38とに分けられる。受信アンテナ18は直接反射波34と間接反射波38との合成波を反射波として受信する。直接反射波34と間接反射波38とはターゲット32から受信アンテナ18までの経路長が異なるため、直接反射波34と間接反射波38とは互いに干渉し合い、干渉の度合いによって両者を合成した反射波の強度(振幅)Iは増減する。干渉の度合いはターゲット32から受信アンテナ18までの経路長によって変化する。すなわち、ターゲット32の高さH、および受信アンテナ18とターゲット32との相対距離Rによって反射波の強度Iは変化する。
【0021】
なお、直接反射波34と間接反射波38の他にも、路上に設けられた交通量測定のための路側器等からの信号や、進行方向からみて側方にあるガードレール等からの反射波が受信アンテナ18に受信され得る。そこで、直接反射波34と間接反射波38以外の信号を排除するために、受信アンテナ18に入射する信号の入射角を限定する手段を受信アンテナ18に備えても良い。具体的には図4に示すように、受信アンテナ18−1〜18−nを水平方向に複数個並べるとともに、受信アンテナ18−1〜18−nに接続し、これらの信号を受ける角度検出器39を設ける。角度検出器は周知のMUSIC(Multiple−Signal−Classification)法やESPRIT(Estimation−od−Signal−Parameters−via−Rotational−Invariance−Techniques)法などの演算を行うことにより受信アンテナ18−1〜18−nに入射した受信信号の入射角を算出する。本実施形態では、角度検出器39の図示しないメモリに、受信アンテナ18−1〜18−nに入射する反射波の水平方向における入射角範囲を定める入射角条件(例えば、車両の進行方向に平行な角度を0°として、水平方向について入射角を±5°以内に限定)を記憶させている。角度検出器39が各受信アンテナ18−1〜18−nから信号を受信すると、角度検出器39は受信アンテナ18−1〜18−nに入射した受信信号の入射角と入射角条件とを比較する。もし、入射角が入射角条件で定める角度よりも大きければ角度検出器39は当該受信信号を排除する。他方、入射角が入射角条件を満足すれば角度検出器39は当該受信信号をミキサ20に送信する。
【0022】
図1に戻り、受信アンテナ18により受信された反射波はミキサ20に送られる。ミキサ20は分配器14にも接続されており、発振器12からの送信波がこの分配器14からミキサ20に送られる。
【0023】
ミキサ20では送信波40と反射波42とをミキシングしたビート信号を生成する。ビート信号とは、送信波40と反射波42との周波数の違いから生じるビート(うなり)の信号を指しており、送信波40に対する反射波42の遅延時間(時間ずれ)によって生じる。このビート信号はフィルタ回路22を経てA/D変換器24によりデジタル信号に変換され、演算処理器26に送られる。演算処理器26はビート信号に基づいてターゲット32と車両30との相対距離Rを算出する。
【0024】
ビート信号から車両30とターゲット32の相対距離Rを求める方法について、以下に説明する。車両30は走行中であることから、ドプラ効果の影響を受けて図5上段に示すように反射波42は送信波40に対して縦軸(周波数)方向にオフセットする。このオフセットの量は、frをビート周波数、fbをドプラ周波数とすると、半周期ごとにfr+fbからfr−fbに変化する。これを受けて、図5中段および下段に示すように、送信波40と反射波42とを混合させたビート信号44の周波数も半期ごとにfr+fbからfr−fbに切り替わる。この現象を利用して、ビート信号44を高速フーリエ変換(FFT)等により周波数成分に変換してfr+fbとfr−fbの値を求めることにより、ビート周波数frを求めることができる。
【0025】
ドプラ効果を取り除いたときの送信波40と反射波42の波形を図6上段に示す。またこのときのビート信号44の周波数変化を図6下段に示す。図6上段に示すように、送信波40と反射波42との間には遅延時間△tが生じている。送信波40と反射波42の伝搬速度をc(例えば光の速度:3×108m/s)とすると、車両30とターゲット32との相対距離(半径距離)Rは下記数式1により表される。
【0026】
【数1】
【0027】
さらに、送信波40の変調繰り返し周期(既知)を1/fm、変調周波数幅(既知)を△fとすると、図6上段の幾何的関係から、下記数式2が導出される。
【0028】
【数2】
【0029】
数式1と数式2より、下記数式3が導出される。数式3により、相対距離Rを求めることができる。
【0030】
【数3】
【0031】
演算処理器26は上述した演算を行うことにより車両30とターゲット32との相対距離Rを求める。
【0032】
また、演算処理器26は車両30とターゲット32との相対距離Rを求めると同時に、反射波42の信号強度(振幅)Iも取得している。取得した強度Iは相対距離Rと対応付けて図示しないメモリに記憶される。
【0033】
上述したように、反射波の信号強度Iは、ターゲット32の相対距離Rおよびターゲット32の高さhによって異なる値を取る。本実施形態においては、相対距離Rおよびターゲット32の高さhを種々変更させたときの反射波の信号強度Iをシミュレーションによって予測し、この予測結果と、相対距離R及び反射波の信号強度Iとから、ターゲット32の高さhを推定している。
【0034】
反射波の信号強度Iは、直接反射波34の強度Ir1と間接反射波38の強度Ir2とを合成値として表わすことができる。直接反射波34の強度Ir1は下記数式4にて表すことができる。
【0035】
【数4】
【0036】
ただし、Pr1は直接反射波34の受信電力、f1は直接反射波34のビート周波数を表わしている。また、Ptは送信電力、Gは利得、λは波長、σはレーダ反射面積(Radar Cross Section、RCS)、Rは車両30とターゲット32との相対距離を表わしている。
【0037】
また、間接反射波38の強度Ir2は下記数式5にて表すことができる。
【0038】
【数5】
【0039】
ただし、Pr2は間接反射波38の受信電力、f2は間接反射波38のビート周波数を表わしている。また、Aは路面反射係数、hはターゲット32の高さを表わしている。さらに、φは直接反射波34と間接反射波38の位相差、cはミリ波の伝搬速度を表わしている。数式4、5から、反射波42の信号強度Iは以下の数式6のように表わすことができる。
【0040】
【数6】
【0041】
数式4〜6を用いたシミュレーションの結果を図7に示す。図7では、相対距離Rの範囲(以下、この範囲を検出範囲と呼ぶ)を区切り、当該検出範囲内においてターゲット32の高さhを種々変更させたときの反射波42の強度Iの軌跡が示されている。ここでは検出範囲はR=30mからR=40mの範囲とした。また、シミュレーションに当たり、ターゲット32の最低高さを0.1mとし、それから0.1m刻みでターゲット32の高さhを上げていき、最高高さを1.0mとした。また、送信波の中心周波数を76GHzとした。また、送信電力Ptは10dBmとし、利得Gは20dBi、レーダ反射面積σは10dBsmとした。
【0042】
図7を参照すると、ターゲット32の高さhが0.1mの時には強度Iの軌跡には極小点が表れていないが、ターゲット32の高さhが0.2mになると相対距離R=38mの地点に強度Iの極小点が表れる。以下高さhが0.2m以上のターゲット32にはすべて極小点が表れていることが理解される。
【0043】
ここで、図7から、ターゲット32が低くなるにつれて極小点の位置が検出範囲の最小値(R=30)から最大値(R=40)側にドリフトしていることが理解される。したがって、当該検出範囲においては検出範囲の最大値に極小点が表れるターゲット32の高さhが検出しうる最小高さということになる。図7から、ターゲット32の高さhが0.2mのときに相対距離R=38mの地点に極小値が表われ、かつ、ターゲットの高さhが0.1mのときには極小値が表われていないことから、検出範囲内において極小値が表われ得るターゲット32の最小高さは0.1mから0.2mの間であることが理解される。一般的に地上から車両30の床下までの高さである最低高さが0.2m以下に設計されていることを考慮すると、この最小高さよりも低いターゲット32は車両が十分に乗り越えられる高さである。したがって当該検出範囲において極小点が検出されなければ警報指令を送る必要はなく、また極小点が検出されれば警報指令を警報器に送らなければならないことが理解される。このように予めシミュレーションにより、車両が乗り越えられる限界高さhL未満のターゲットについては極小点が検出されず、かつ、車両の限界高さhL以上のターゲットについて極小点が検出されるように検出範囲を定めることができる。
【0044】
演算処理器26には上述した検出範囲が予め設定されている。演算処理器26は、実際の車両30とターゲットとの相対距離Rおよび反射波強度Iを求め、相対距離Rの値が上述した検出範囲に含まれるときには相対距離Rに対応する反射波強度Iの軌跡を監視する。さらに当該軌跡における極小点の有無を検出する。極小点の有無を検知することにより、反射波の反射源であるターゲット32の高さが、車両30が乗り越えることのできる高さか否かを判定することができる。さらにその判定結果に基づいて警報指令の要否を決定することができる。
【0045】
上述した判定処理を演算処理器26に実行させるためのフローチャートを図8に示す。まず、演算処理器26は反射波42の強度Iを算出するともに、当該強度Iを車両30とターゲット32との相対距離Rに対応付けて図示しないメモリ等に記憶する(S1)。このとき、メモリの記憶容量を軽減させるために、検出範囲外の強度Iは記憶しない(捨てる)ように設定しても良い。
【0046】
次に、予め定めた検出範囲における強度Iの軌跡について極小点が検知されたか否かを判定する(S2)。具体的には、I(x)を区間xにおける強度とすると、I(x)<I(x−△x)かつI(x)<I(x+△x)との条件を満たすI(x)を極小点と判定する。
【0047】
上述した条件を満たす強度I(x)が検出範囲内に表れたときには、演算処理器26は直ちに演算処理器26に接続された警報器(図示せず)に警報指令を送る(S3)。これによりドライバーに車両の減速やターゲット32からの回避を促す。また、検出範囲内に極小点が検出されない場合には演算処理器26は警報器には警報指令を送らない(S4)。なお、(S3)において警報器に警報指令を送ることに加えて、もしくはこれに代えて、車両の制御を行うコントロールユニットに対して警報指令を送って車両を減速させたり、シートベルトの張力(テンション)を増加させるようにしても良い。
【0048】
このように、本実施形態においては検出範囲を予め定めておき、当該検出範囲における強度Iの極小点の有無に基づいて警報の要否を判定している。したがって、警報の要否判定に際して従来技術のような軌跡のパターンマッチングを行う必要がなくなり、パターンマッチングのための演算処理時間を省くことが可能となる。この結果従来よりも迅速に警報の要否を判定することができる。
【0049】
なお、図8のフローチャートにおいては極小点の有無により警報要否を判定していたが、検出範囲内の軌跡を全て求め、検出範囲における極小点の個数やその位置に基づいてターゲット32の高さhを判定し、その後に警報要否を決定するようにしても良い。
【0050】
図7に示すように、ターゲット32が高くなるにつれて強度Iの極小点の表れる地点が検出範囲の最大値(R=40m)から最小値(R=30m)に向かって徐々にドリフトする。つまり、極小点に対応する相対距離Rの値が小さくなるほどターゲット32は高くなる。
【0051】
また、ターゲット32が高くなるにつれて検出範囲内の極小点の個数が増える。図7においてはターゲット32の高さが0.2m〜0.5mの範囲においては極小点が1個であるが、0.6m〜1.0mでは極小点が2個となる。
【0052】
ここで、図9の左側のグラフは極小点が1個であったときの極小点のドリフトの様子を示し、図9の右側のグラフは極小点が2個であったときの、検出範囲における最大値(R=40m)側の極小点のドリフトの様子を示している。これらのグラフと極小点の個数および極小点の位置とを参照することにより、ターゲット32の高さを求め、さらに警報指令の要否を判定することができる。
【0053】
図10には上記判定を演算処理器26が行うためのフローチャートが示されている。まず、演算処理器26は反射波42の強度Iを算出するともに、当該強度Iを車両30とターゲット32との相対距離Rに対応付けて記憶する。この処理を全検出範囲にわたって行う(S5、S6)。次に、演算処理器26は検出範囲における強度Iの極小点を計測する(S7)。極小点が検出されなければ(カウントされなければ)警報器に警報指令を送らない(S8)。一方、極小点が検出されると、当該極小点の個数を判定する(S9)。極小点の個数が1個の場合は、当該極小点に対する相対距離Rの値を抽出し、図視しないメモリに記憶された図9左側のグラフ、またはこのグラフに対応する表に照らしてターゲット32の高さhを同定する(S10)。極小点の個数が2個の場合は、当該2個の極小点のうち、最大値(R=40m)側の極小点に対する相対距離Rの値を抽出し、図視しないメモリに記憶された図9右側のグラフ、またはこのグラフに対応する表に照らしてターゲット32の高さhを同定する(S11)。次に、S10またはS11から求められたターゲット32の高さhと、予め設定され図示しないメモリ等に記憶された閾値とを比較する(S12)。ターゲット32の高さhが閾値を超える場合には、演算処理器26は警報器に警報指令を送る(S13)。ターゲット32の高さhが閾値以下である場合には警報指令を送らない(S14)。
【0054】
極小点の個数カウントおよび当該極小点に対応する検出範囲の値の抽出は従来技術のパターンマッチングに比べて演算時間が極めて短いので、図10にて例示した判定処理を実行することにより、警報要否判定を従来よりも迅速に行うことができる。
【0055】
なお、ターゲット32の高さとして想定しうる高さが0.5m以下である場合は検出範囲における極小点は1個から増加することはないので、極小点のドリフト傾向のみからターゲット32の高さ検出を行っても良い。また、ターゲット32の高さ検出が、極小点0個(0〜0.2m)極小点1個(0.2m〜0.5m)、極小点2個(0.5m〜1.0m以下)の3段階検出で足りる場合には、極小点の個数計測のみによってターゲット32の高さ検出を行っても良い。
【符号の説明】
【0056】
10 レーダ装置、12 発振器、14 分配器、16 送信アンテナ、18 受信アンテナ、20 ミキサ、22 フィルタ回路、24 A/D変換器、26 演算処理器、30 車両、32 ターゲット、34 直接反射波、36 路面、38 間接反射波、40 送信波、42 反射波、44 ビート信号。
【特許請求の範囲】
【請求項1】
送信波を発振する発振器と、
前記送信波を出力する送信アンテナと、
ターゲットからの反射波を受信する受信アンテナと、
前記反射波の強度を算出するとともに、前記ターゲットまでの相対距離を求める演算処理器と、を備え、
前記演算処理器には、前記相対距離について検出範囲が予め設定され、
前記演算処理器は、前記相対距離に対する前記反射波の強度が、前記検出範囲において極小点を有するときに所定の処理を行うことを特徴とする、レーダ装置。
【請求項2】
請求項1に記載のレーダ装置であって、
前記演算処理器は、前記検出範囲における前記強度の極小点の個数に基づいて前記ターゲットの高さを算出することを特徴とする、レーダ装置。
【請求項3】
請求項1または2に記載のレーダ装置であって、
前記演算処理器は、前記検出範囲における前記強度の極小点に対応する相対距離の値に基づいて前記ターゲットの高さを算出することを特徴とする、レーダ装置。
【請求項4】
請求項1から3のいずれか一つに記載のレーダ装置であって、
前記レーダ装置は車両に搭載され、
前記車両の最低高さ未満のターゲットについては極小点が検出されず、かつ、前記車両の最低高さ以上のターゲットについて極小点が検出されるように前記検出範囲が定められていることを特徴とする、レーダ装置。
【請求項5】
請求項1から4のいずれか一つに記載のレーダ装置であって、
前記受信アンテナに入射した前記反射波の入射角を求め、予め定めた水平方向の入射角範囲外の反射波を排除することにより前記反射波のノイズ除去を行う、角度検出器を備えたことを特徴とする、レーダ装置。
【請求項1】
送信波を発振する発振器と、
前記送信波を出力する送信アンテナと、
ターゲットからの反射波を受信する受信アンテナと、
前記反射波の強度を算出するとともに、前記ターゲットまでの相対距離を求める演算処理器と、を備え、
前記演算処理器には、前記相対距離について検出範囲が予め設定され、
前記演算処理器は、前記相対距離に対する前記反射波の強度が、前記検出範囲において極小点を有するときに所定の処理を行うことを特徴とする、レーダ装置。
【請求項2】
請求項1に記載のレーダ装置であって、
前記演算処理器は、前記検出範囲における前記強度の極小点の個数に基づいて前記ターゲットの高さを算出することを特徴とする、レーダ装置。
【請求項3】
請求項1または2に記載のレーダ装置であって、
前記演算処理器は、前記検出範囲における前記強度の極小点に対応する相対距離の値に基づいて前記ターゲットの高さを算出することを特徴とする、レーダ装置。
【請求項4】
請求項1から3のいずれか一つに記載のレーダ装置であって、
前記レーダ装置は車両に搭載され、
前記車両の最低高さ未満のターゲットについては極小点が検出されず、かつ、前記車両の最低高さ以上のターゲットについて極小点が検出されるように前記検出範囲が定められていることを特徴とする、レーダ装置。
【請求項5】
請求項1から4のいずれか一つに記載のレーダ装置であって、
前記受信アンテナに入射した前記反射波の入射角を求め、予め定めた水平方向の入射角範囲外の反射波を排除することにより前記反射波のノイズ除去を行う、角度検出器を備えたことを特徴とする、レーダ装置。
【図2】

【図5】
【図6】
【図7】

【図8】
【図9】
【図10】

【図1】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図1】
【図3】
【図4】
【公開番号】特開2012−2636(P2012−2636A)
【公開日】平成24年1月5日(2012.1.5)
【国際特許分類】
【出願番号】特願2010−137205(P2010−137205)
【出願日】平成22年6月16日(2010.6.16)
【出願人】(000003609)株式会社豊田中央研究所 (4,200)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成24年1月5日(2012.1.5)
【国際特許分類】
【出願日】平成22年6月16日(2010.6.16)
【出願人】(000003609)株式会社豊田中央研究所 (4,200)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]