
レーダ装置
【課題】安定した相関追尾ができるレーダ装置を提供する。
【解決手段】FMCW方式のダウンスイープまたはアップスイープの信号を繰り返し送受信する送受信器20と、送受信器からの信号に基づく測角値を用いてビート周波数の空間を表すfbx−fby軸に座標変換するビート周波数軸変換部36と、ビート周波数軸変換部における変換によって得られたfbx−fby軸の空間において位置、速度および加速度を用いて相関追尾を行う相関追尾部37と、相関追尾部における相関追尾によって得られた結果をX−Y軸の位置および速度に変換するX−Y軸変換部38を備える。
【解決手段】FMCW方式のダウンスイープまたはアップスイープの信号を繰り返し送受信する送受信器20と、送受信器からの信号に基づく測角値を用いてビート周波数の空間を表すfbx−fby軸に座標変換するビート周波数軸変換部36と、ビート周波数軸変換部における変換によって得られたfbx−fby軸の空間において位置、速度および加速度を用いて相関追尾を行う相関追尾部37と、相関追尾部における相関追尾によって得られた結果をX−Y軸の位置および速度に変換するX−Y軸変換部38を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、相関追尾により車両の速度を観測するレーダ装置に関する。
【背景技術】
【0002】
道路を走行する車両の速度をレーダ装置によって観測する場合は、他車両や背景といった複雑かつ多数の反射点が存在する中で目標車両を検出して相関追尾が行われる。このような環境下において、アンテナビーム幅が広く、FMCW(Frequency Modulated Continuous Wave)方式によるビート周波数軸の分解能が低い場合は、角度軸でも周波数軸でもメインローブの中に複数の反射点が存在することになる。このため、従来のダウンスイープとアップスイープのペアリングにより距離および速度を算出する方法では、ペアリングの誤りに起因するゴーストが生じる。なお、FMCW方式については、例えば『吉田孝監修、電子情報通信学会、“改訂レーダ技術”、pp.274-275(1996)』に説明されている。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】吉田孝監修、‘改定レーダ技術’、電子情報通信学会、pp.264-267(1996)
【非特許文献2】Paul R.KALATA,”A Generalized Parameter for α−β、α−β−γ Target Trackers ”,IEEE Trans. ,pp.174-181,AES VOL.AES-20,N0.2,MARCH 1984
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述したように、従来のレーダ装置では、ダウンスイープとアップスイープとをペアリングすることにより距離および速度を算出するので、ペアリングの誤りに起因するゴーストが生じ、安定した相関追尾ができないという問題がある。
【0005】
本発明は、ペアリングを不要にして、安定した相関追尾ができるレーダ装置を提供することを課題とする。
【課題を解決するための手段】
【0006】
上記の課題を解決するために、実施形態に係るレーダ装置は、FMCW方式のダウンスイープまたはアップスイープの信号を繰り返し送受信する送受信器と、送受信器からの信号に基づく測角値を用いてビート周波数の空間を表すfbx−fby軸に座標変換するビート周波数軸変換部と、ビート周波数軸変換部における変換によって得られたfbx−fby軸の空間において位置、速度および加速度を用いて相関追尾を行う相関追尾部と、相関追尾部における相関追尾によって得られた結果をX−Y軸の位置および速度に変換するX−Y軸変換部を備えたことを特徴とする。
【図面の簡単な説明】
【0007】
【図1】第1の実施形態に係るレーダ装置の構成を示すブロック図である。
【図2】第1の実施形態に係るレーダ装置の動作を示すフローチャートである。
【図3】第1の実施形態に係るレーダ装置で用いられるスイープ波形の例を示す図である。
【図4】第1の実施形態に係るレーダ装置で生じる誤差を説明するためのX−Y空間を示す図である。
【図5】第1の実施形態に係るレーダ装置で生じる誤差を説明するためのfbx−fby空間を示す図である。
【図6】第1の実施形態に係るレーダ装置で生じる誤差の例を説明するための図である。
【図7】第1の実施形態に係るレーダ装置で誤差が生じる原理を説明するための図である。
【図8】第1の実施形態に係るレーダ装置で残留する誤差を説明するための図である。
【図9】第2の実施形態に係るレーダ装置の構成を示すブロック図である。
【図10】第2の実施形態に係るレーダ装置の動作を示すフローチャートである。
【図11】第3の実施形態に係るレーダ装置の構成を示すブロック図である。
【図12】第3の実施形態に係るレーダ装置の動作を示すフローチャートである。
【図13】第3の実施形態に係るレーダ装置の動作を説明するための図である。
【図14】第1〜第3実施形態に係るレーダ装置で行われる相関追尾を説明するための図である。
【発明を実施するための形態】
【0008】
以下、実施形態について、図面を参照しながら詳細に説明する。
【0009】
(第1の実施形態)
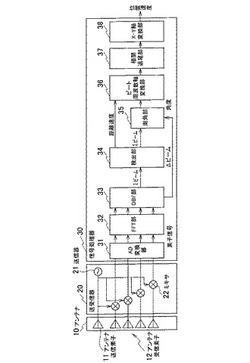
第1の実施形態に係るレーダ装置において採用されている方式をFSAT(Frequency Space data Association and Tracking)と呼ぶ。図1は、第1の実施形態に係るレーダ装置の構成を示す系統図である。このレーダ装置は、アンテナ10、送受信器20および信号処理器30を備えている。
【0010】
アンテナ10は、アンテナ送信素子11と複数のアンテナ受信素子12とから構成されている。アンテナ送信素子11は、送受信器20から送信信号として送られてくる電気信号を電波に変換して外部に送出する。複数のアンテナ受信素子12は、外部からの電波を受信して電気信号に変換し、受信信号として送受信器20に送る。
【0011】
送受信器20は、送信器21と複数のミキサ22を備えており、複数のミキサ22は、複数のアンテナ受信素子12にそれぞれ対応して設けられている。一般的なアップチャープとダウンチャープの信号を送信信号として用いるFMCW方式の場合は、送信器21でスイープした送信信号を生成し、アンテナ送信素子11および複数のミキサ22に送る。複数のミキサ22は、複数のアンテナ受信素子12からそれぞれ受け取った受信信号を、送信器21からの信号に応じて周波数変換してビート周波数信号を生成し、信号処理器30に送る。
【0012】
信号処理器30は、AD変換器31、FFT部32、DBF部33、検出部34、測角部35、ビート周波数軸変換部36、相関追尾部37およびX−Y軸変換部38を備えている。
【0013】
AD変換器31は、送受信器20からアナログ信号として送られてくるビート周波数信号をデジタル信号に変換し、素子信号としてFFT部32に送る。FFT部32は、AD変換器31から送られてくる素子信号を高速フーリエ変換により周波数軸上の信号に変換し、DBF部33に送る。
【0014】
DBF部33は、FFT部32から送られてくる周波数軸上の信号を用いて、ΣビームとΔビームを形成する。このDBF部33で形成されたΣビームは検出部34に送られ、Δビームは測角部35に送られる。
【0015】
検出部34は、DBF部33から送られてくるΣビームに基づき距離および速度を検出し、それらを表す値をビート周波数軸変換部36に送る。また、検出部34は、DBF部33から送られてきたΣビームを測角部35に送る。
【0016】
測角部35は、検出部34から送られてくるΣビームおよびDBF部33から送られてくるΔビームを用いて、位相モノパルス測角方式により測角を行う。なお、位相モノパルス測角方式については、例えば『電子情報通信学会、“改訂レーダ技術”、pp.262-264(1996)』に説明されている。
【0017】
位相モノパルス測角の場合のビームは次式で表すことができる。
【数1】

【0018】
ここで、
bm(θ);Σビーム出力
en(θ);素子パターン(n=1〜N)
Wm(θ) ;複素ウェイト(n=1〜N)
n ;素子番号(n=1〜N)
λ ;波長
また、位相モノパルス測角の場合には、次式のΔビームを用いて測角することができる。
【数2】
【0019】
ここで、
Δm(θ) ; Δビーム出力
en(θ); 素子パターン
Wm(n) ; 複素ウェイト(n=1〜N)
n ; 素子番号(n=1〜N)
λ ; 波長
bmとΔmを用いて、誤差電圧εは、次式で表すことができる。
【数3】
【0020】
ここで、
* ;複素共役
この誤差電圧εと、予め保存されている誤差電圧εと測角値θの対応テーブル(または、多項式近似値)を用いて、測角値を算出できる。以上のようにして測角部35で算出された測角値は、ビート周波数軸変換部36に送られる。
【0021】
ビート周波数軸変換部36は、検出部34から送られてくる距離および速度を表す値と、測角部35から送られてくる測角値とに基づき、ビート周波数軸変換を行う。ここで、ΣビームとΔビームの信号をビート周波数fbで代表して表記すると、ビート周波数fbは、次のように表すことができる。
【数4】
【0022】
ここで、
fb:ビ−ト周波数
B :周波数帯域
T :スイープ時間
R :距離
c :光速
V :速度
λ :波長
kr:2B/(Tc)
kv:λ/2
ビート周波数fbの微分、更にその微分で表現すると、次の通りである。
【数5】
【0023】
これらを距離R、速度Vおよび加速度Aで表現すると、次の通りである。
【数6】
【0024】
ここで、
R:距離
V:速度
A:加速度
これを、測角値θを用いてX−Y軸に変換できる。
【数7】
【0025】
ここで、
fb; ビート周波数
θ ; 測角値
このようにしてビート周波数軸変換部36においてfbx−fbyに座標変換された結果(fbxおよびfby)は、相関追尾部37に送られる。
【0026】
相関追尾部37は、ビート周波数軸変換部36から送られてくるfbxおよびfbyの空間で、位置、速度および加速度を用いて相関追尾処理を実行する。
【0027】
上述したfbxおよびfbyは、1回微分と2回微分を用いて、等加速度運動(加速度の時間微分は0)とすると、次式で表現できる。
【数8】
【0028】
fbxとfbyの速度(1回微分)と加速度(2回微分)まで観測すれば、(8)式と(9)式に代入して、位置(xs、ys)と速度(vxs、vys)を算出することができる。
【0029】
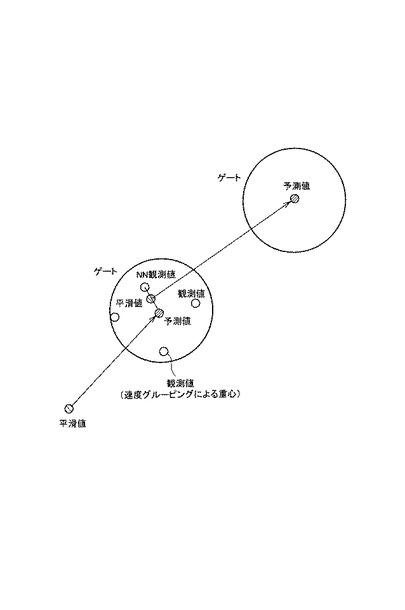
このfbxとfbyの速度、加速度は、例えばαβγフィルタを用いると、次式で表される(図14参照)。なお、αβγフィルタについては、例えば非特許文献1および非特許文献2に追尾フィルタとして説明されているので、必要に応じて参照されたい。
【数9】
【0030】
初期値は次の通りである。
【数10】
【0031】
この相関追尾を用いて平滑値を算出し、(8)〜(10)式を用いて、位置(xs、ys)と速度(vxs、vys)を算出することができる。相関追尾部37における相関追尾処理により得られる平滑値および予測値は、X−Y軸変換部38に送られる。
【0032】
X−Y軸変換部38は、相関追尾部37から送られてきた平滑値および予測値をX−Y軸の位置および速度に変換し、外部に送る。
【0033】
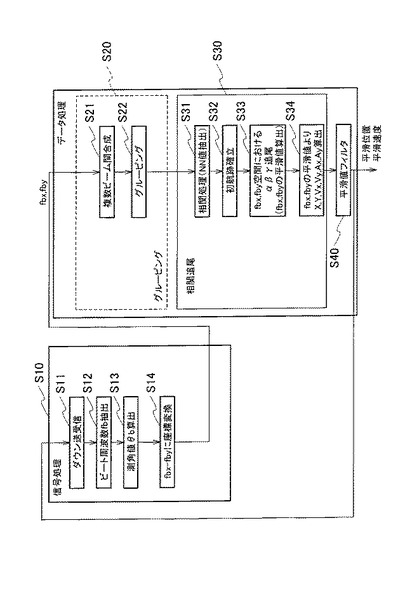
次に、第1の実施形態に係るレーダ装置の動作を、図2に示すフローチャートを参照しながら説明する。最初に、信号処理が行われる(ステップS10)。具体的には、まず、ダウン送受信が行われる(ステップS11)。すなわち、送受信器20では、送信器21で生成されたダウンスイープの送信信号を、アンテナ10のアンテナ送信素子11および複数のミキサ22に送る。アンテナ送信素子11は、送受信器20から送信信号として送られてくる電気信号を電波に変換して外部に送出する。アンテナ10の複数のアンテナ受信素子12は、外部からの電波を受信して電気信号に変換し、受信信号として送受信器20に送る。送受信器20に含まれる複数のミキサ22は、複数のアンテナ受信素子12からそれぞれ受け取った受信信号を、送信器21からの信号に応じて周波数変換してビート周波数信号を生成し、信号処理器30に送る。
【0034】
信号処理器30においては、AD変換器31は、送受信器20からアナログ信号として送られてくるビート周波数信号をデジタル信号に変換し、素子信号としてFFT部32に送る。FFT部32は、AD変換器31から送られてくる素子信号を高速フーリエ変換により周波数軸上の信号に変換し、DBF部33に送る。DBF部33は、FFT部32から送られてくる周波数軸上の信号を用いて、ΣビームとΔビームを形成し、それぞれ検出部34および測角部35に送る。検出部34は、DBF部33から送られてくるΣビームに基づき距離および速度を検出し、それらを表す値をビート周波数軸変換部36に送る。また、検出部34は、DBF部33から送られてきたΣビームを測角部35に送る。
【0035】
次いで、測角値θbが算出される(ステップS13)。すなわち、測角部35は、検出部34から送られてくるΣビームおよびDBF部33から送られてくるΔビームを用いて、位相モノパルス測角方式により測角を行い、測角値θbをビート周波数軸変換部36に送る。
【0036】
次いで、fbx−fbyへの座標変換が行われる(ステップS14)。すなわち、ビート周波数軸変換部36は、検出部34から送られてくる距離および速度を表す値と、測角部35から送られてくる測角値とに基づき、ビート周波数軸変換を行い、fbx−fbyに座標変換された結果(fbxおよびfby)を相関追尾部37に送る。
【0037】
次いで、グルーピング処理が行われる(ステップS20)。このグルーピング処理はオプションであり、複数ビームを形成する場合に実行される。グルーピング処理の内容は後述する。
【0038】
次いで、相関追尾処理が行われる(ステップS30)。この相関追尾処理は、相関処理部37において実行される。相関追尾処理においては、まず、相関処理が行われる(ステップS31)。すなわち、NN値が抽出される。次いで、初航跡が確立される(ステップS32)。次いで、fbx、fby空間におけるαβγ追尾が行われる(ステップS33)。すなわち、fbx、fbyの平滑値が算出される。次いで、fbx、fbyの平滑値より、X、Y、Vx、Vy、AxおよびAyが算出される(ステップS34)。
【0039】
以上の相関追尾処理が終了すると、次いで、平滑値のフィルタ処理が行われる(ステップS40)。これにより、平滑位置および平滑速度が出力される。その後、信号処理S10のステップS11に戻り、上述した処理が繰り返される。
【0040】
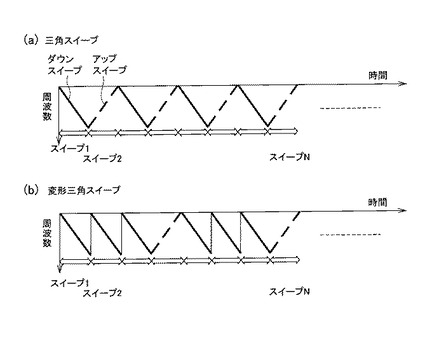
図3は、第1の実施形態で用いられるスイープ波形の例を示す。スイープ波形としては、ダウンスイープまたはアップスイープの一方のみでよいが、一般的にダウンスイープとアップスイープの組み合わせで表現している。相関追尾のためのサイクルタイム(相関追尾の時間間隔)内のスイープを、一般にNスイープとした場合、NスイープのFFT波形の同一ビート周波数において、振幅積分した結果によりスレショルド判定して検出した後、検出バンク(ビート周波数バンク)において、Nスイープ分の測角を行い、測角値を平均することにより、測角値の精度を高めることができる。
【0041】
また、上述したグルーピング処理は、以下のように構成できる。グルーピング処理においては、まず、複数ビーム間合成が行われる(ステップS21)。すなわち、複数ビーム間の観測値(fbx、fby)が合成される。次いで、グルーピングが行われる(ステップS22)。すなわち、複数の観測値の中から、振幅値の大きい順から極値を抽出し、抽出点のビート周波数軸の周りに所定のゲートを形成し、そのゲート内にある観測値(ビート周波数)を各振幅値により重みづけするといった重心演算を用いて、複数点をグルーピングする。このグルーピングした結果は相関追尾部37に送られる。
【0042】
また、(fbx、fby)より、位置および速度の平滑値を算出後、路肩反射点の速度(自車両速度)や路肩位置等によるフィルタを適用して、不要点を抑圧する処理を付加するように構成することもできる。
【0043】
以上説明したように、第1の実施形態に係るレーダ装置によれば、ダウンスイープまたはアップスイープのみの繰り返しスイープを用いて、ビート周波数を観測し、ビート周波数空間で相関追尾し、相関追尾の結果(平滑値および予測値)を用いてX−Y軸に変換するので、ダウンスイープとアップスイープのペアリングが不要であり、誤ペアリングによるゴーストは生じない。その結果、複雑な背景下においても、目標の観測位置精度を高めて、安定した相関追尾を実現できる。
【0044】
(第2の実施形態)
第2の実施形態に係るレーダ装置において採用される方式をIFSAT(;Improved FSAT)と呼ぶ。上述した第1の実施形態に係るレーダ装置では、ダウンスイープまたはアップスイープの一方のみを用いている。この場合、fbx−fby空間とX−Y空間の関係により、非線形の誤差が生じる。まず、この誤差について説明する。
【0045】
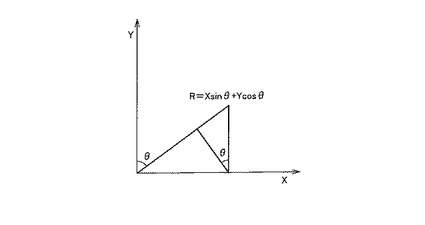
X−Y空間とfbx−fby空間の測角値θが等しいものとし、等加速度運動を前提とすると、図4および図5を参照して、ビート周波数fb、その1回微分および2回微分は次式で表現できる。
【数11】
【0046】
(15)式をx、y成分に分離すると次式で表すことができる。ただし、等加速度運動(加速度の時間微分は0)とする。
【数12】
【0047】
ここで、
xs、ys :位置の平滑値
vxs、vys:速度の平滑値
axs,ays:加速度の平滑値
θ :測角値
(8)式と(16)式、(9)式と(17)式を比較する。左辺のfbx、fbyを両者で等しいとすると、
(8)式→(16)式
xs→xs・sinθ
vxs→vxs・sinθ
axs→axs・sinθ
(9)式→(17)式
ys→ys・cosθ
vys→vys・cosθ
ays→ays・cosθ
が対応しており、θによる誤差分があることがわかる。これは、fbとθより、fbxとfbyを(7)式の関係で定義したものと、(16)および(17)式で定義したfbxとfbyが異なり、実装上は簡単化のため(7)〜(14)式を用いて処理するために生じる誤差である。この誤差の一例を図6に示す。
【0048】
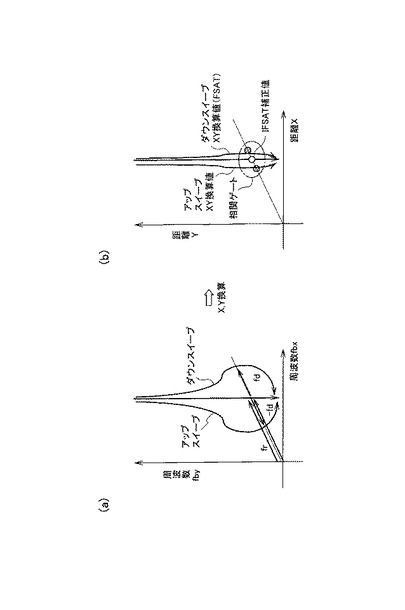
ダウンスイープで目標がX軸一定で、Y軸に沿って近づく場合は、ビート周波数空間では、近距離広角において、図6(a)に示すように、距離によるビート周波数成分frと速度によるビート周波数成分fdが加算され、外側に膨らむような航跡となる。この原理を、アップスイープの場合と合わせて、図7に示す。
【0049】
ダウンスイープの場合は、距離によるビート周波数fbrと近づく速度によるビート周波数fbvは同一の正の周波数となる。一方、アップスイープの場合には、距離によるビート周波数fbrは負の周波数となり、近づく速度によるビート周波数fbvは正の方向の周波数となる。これを正の周波数として観測すると、折り返した周波数となり、ダウンスイープの場合とアップスイープの場合では、図8に示すような関係となる。これを(8)および(9)式により、X−Y軸に換算すると、上述した誤差が残留し、図8(b)に示すように、実際の車両の軌跡が直線の場合であっても、若干ずれた位置に観測される。
【0050】
次に、この誤差を補正する手法を考える。ダウンスイープとアップスイープの場合の軌跡は、X−Y軸に変換すると、図8(b)に示すように、真値の軌跡に対して左右の逆方向に誤差が残留する。この逆方向へのズレを利用して、ダウンスイープとアップスイープの各々のX−Y軸に換算後の出力であるダウンスイープのXY換算値(xsd、ysd)とアップスイープのXY換算値(xsu,ysu)が所定のゲート範囲内にあれば、一般に、次式で結合することにより、位置精度を改善できる。
【数13】
【0051】
ここで、
(xs,ys) ;結合後のX−Y軸の位置
(xsd,ysd);ダウンスイープのX−Y軸換算後の位置
(xsu,ysu);アップスイープのX−Y軸換算後の位置
Wd ;ダウンスイープに対する重みづけ
Wu ;アップスイープに対する重みづけ=(1−Wd)
重みづけの例としては、ダウンスイープとアップスイープを均等にすればWd=Wu=0.5とすることができる。図8(b)に示すIFSAT補正値は、ダウンスイープのXY換算値とアップスイープのXY換算値とが重み付けされた値である。
【0052】
図9は、上述した誤差の補正を実現するための第2の実施形態に係るレーダ装置の構成を示す系統図である。このレーダ装置は、図1に示した第1の実施形態に係るレーダ装置の信号処理部30にダウンアップ結合部39が追加されて構成されている。
【0053】
ダウンアップ結合部39は、X−Y軸変換部38から送られてきたダウンスイープに基づく平滑値とアップスイープに基づく平滑値を結合し、外部に送る。
【0054】
次に、第2の実施形態に係るレーダ装置の動作を、図10に示すフローチャートを参照しながら説明する。最初に、信号処理が行われる(ステップS15)。この信号処理は、第1の実施形態のステップS10(図2参照)の処理が、ダウンスイープとアップスイープの信号を交互に送受信するダウン/アップ信号処理(ステップS16)に変更されている点を除けば、第1の実施形態のそれと同じである。
【0055】
次いで、グルーピング処理が行われる(ステップS20)。このグルーピング処理は、第1の実施形態のそれと同様にオプションであり、複数ビームを形成する場合に実行される。
【0056】
次いで、相関追尾処理が行われる(ステップS30)。この相関追尾処理は、ダウンスイープとアップスイープに対する処理が交互に行われる点を除けば、上述した第1の実施形態のそれと同じである。次いで、ダウン・アップ平滑値結合が行われる(ステップS50)、すなわち、ダウンアップ結合部39は、X−Y軸変換部38から送られてきたダウンスイープに基づく平滑値とアップスイープに基づく平滑値を結合する。
【0057】
次いで、平滑値のフィルタ処理が行われる(ステップS40)。これにより、平滑位置および平滑速度が出力される。その後、信号処理S10のステップS16に戻り、上述した処理が繰り返される。
【0058】
なお、ゲートとしては、位置ゲートの他に、速度ゲートを用いて、ダウンスイープとアップスイープの速度である(vxd、vyd)と(vxu,vyu)が所定の範囲内にあるという条件を追加するように構成できる。
【0059】
以上説明したように、第2の実施形態に係るレーダ装置によれば、ダウンスイープとアップスイープの各々について第1の実施形態に係るレーダ装置により得られた結果を用いて、X−Y軸上で相関をとり、重みづけ平均化するので、位置および速度の精度を向上できる。
【0060】
(第3の実施形態)
第3の実施形態に係るレーダ装置において採用されている方式をAFSAT(Advanced FSAT)と呼ぶ。上述した第2の実施形態に係るレーダ装置では、ダウンスイープとアップスイープの位置の結合を用いるので、誤差を補正した位置を算出できる。
【0061】
第3の実施形態に係るレーダ装置は、更に精度の高い位置を算出するようにしたものである。従来のレーダ装置においては、誤ペアリングにより、ゴーストが発生するという問題が存在するが、ペアリングが正しければ、より精度の高い位置を算出できる。ここでは、簡単のためダウンスイープとアップスイープによるペアリングを用いた測距測速方式をMPAT(Measured Pairing data Association and Tracking)と呼ぶ。
【0062】
図11は、MPAT方式を用いたレーダ装置の構成を示すブロック図である。このレーダ装置は、図9に示した第2の実施形態に係るレーダ装置の信号処理部30にペアリング処理部40および相関追尾部41が追加されて構成されている。
【0063】
ペアリング処理部40は、測角部35からダウンスイープとアップスイープの各々に対する測角値を取得し、両者の測角値が所定の範囲にあるものをペアリングし、(19)式を用いて、距離および速度を算出する。このペアリング処理部40で算出された距離および速度は、相関追尾部41に送られる。
【数14】
【0064】
ここで、
B ;周波数帯域
R ;目標距離
T ;スイープ時間
c ;光速
V ;目標速度
λ ;波長
Δf1;ダウンチャープ信号の観測周波数
Δf2;アップチャープ信号の観測周波数
fd ;ドップラー周波数
fr ;距離による周波数
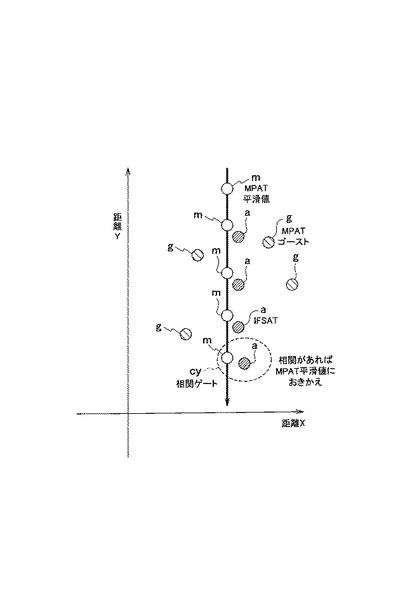
相関追尾部41は、ペアリング処理部40から送られてくる距離および速度により相関追尾を実施し、距離および速度の平滑値を算出してダウンアップ結合部39に送る。この平滑値の中には、図13に示すように、誤ペアリングによるゴーストであるMPATゴーストmも含まれているので、これを排除するために、第2の実施形態で算出した位置X−Y(IFSAT)aを中心に相関ゲートcgを形成し、ペアリングにより算出したX−Y(MPAT)mが相関ゲート内にある場合は、X−Y(IFSAT)aの結果を置き換える。また、置き換える際にX−Yの位置の差により段差が生じることを防ぐために、次式に示すようにIFSATとMPATのX−Yの値に重みづけする。
【数15】
【0065】
ここで、
(xs,ys) ;結合後のX−Y軸の位置
(xsa,ysa) ;IFSATのX−Y軸の位置
(xsm,ysm) ;MPATのX−Y軸の位置
Wa ;IFSATに対する重みづけ
Wm ;MPATに対する重みづけ=(1−Wa)
重みづけの例としては、IFSATとMPATを均等にすればWa=Wm=0.5とすればよい。
【0066】
なお、IFSATとMPATの相関をとる際には、両者の速度が所定の範囲内になるという条件を追加するように構成できる。
【0067】
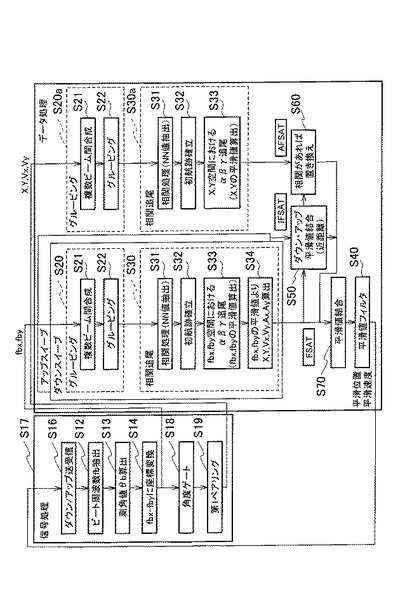
次に、第3の実施形態に係るレーダ装置の動作を、図12に示すフローチャートを参照しながら説明する。
【0068】
最初に、信号処理が行われる(ステップS17)。この信号処理は、ステップS17の処理に、角度ゲート処理(ステップS18)および第1ペアリング処理(ステップS19)が追加されている点を除けば、第2の実施形態のステップS15(図10参照)で行われる信号処理と同じである。この信号処理では、まず、上述した第2の実施形態と同様に、ステップS16→ステップS12→ステップS13→ステップS14の処理が行われる。
【0069】
次いで、グルーピング処理が行われる(ステップS20)。このグルーピング処理は、第1の実施形態のそれと同様にオプションであり、複数ビームを形成する場合に実行される。次いで、相関追尾処理が行われる(ステップS30)。この相関追尾処理は、上述した第2の実施形態のそれと同じである。
【0070】
次いで、ダウン・アップ平滑値結合(近距離)が行われる(ステップS50)、すなわち、ダウンアップ結合部39は、X−Y軸変換部38から送られてきたダウンスイープに基づく平滑値とアップスイープに基づく平滑値を結合する。
【0071】
上記ステップS17、S20、S30およびS40の処理と並行して、以下の処理が行われる。すなわち、信号処理では、ステップS14の処理が終了すると、角度ゲート処理が行われる(ステップS18)。すなわち、ペアリング処理部40は、相関ゲートを形成する。次いで、第1ペアリング処理が行われる(ステップS19)。すなわち、ペアリング処理部40は、測角部35からダウンスイープとアップスイープの各々に対する測角値を取得し、両者の測角値が所定の範囲にあるものをペアリングして距離および速度を算出し、相関追尾部41に送る。
【0072】
次いで、グルーピング処理が行われる(ステップS20a)。このグルーピング処理は、第1の実施形態のそれと同様にオプションであり、複数ビームを形成する場合に実行される。次いで、相関追尾処理が行われる(ステップS30a)。この相関追尾処理は、上述したステップS30の処理からステップS34の処理、つまりfbx、fbyの平滑値よりX、Y、Vx、Vy、AxおよびAyを算出する処理を除去したものである。
【0073】
次いで、相関があれば置き換える処理が行われる(ステップS60)。すなわち、相関追尾部41は、ペアリングにより算出したX−Y(MPAT)mが相関ゲートcg内にある場合は、X−Y(IFSAT)iの結果を置き換える。
【0074】
次いで、平滑値結合が行われる(ステップS70)。すなわち、ダウンアップ結合部39は、X−Y軸変換部38から送られてきたダウンスイープに基づく平滑値とアップスイープに基づく平滑値を結合した結果に、更に、相関追尾部41から送られてきた平滑値を結合する。
【0075】
次いで、平滑値のフィルタが行われる(ステップS40)。その後、ステップS16に戻り、上述した処理が繰り返される。
【0076】
以上説明したように、第3の実施形態に係るレーダ装置によれば、第2の実施形態に係るレーダ装置により得られた結果と、ダウンスイープとアップスイープによるペアリング結果の観測値を用いた相関追尾の結果との相関をとるので、ダウンスイープーアップスイープの誤ペアリングによるゴーストを抑えつつ、位置および速度の精度を向上できる。
【0077】
なお、上述した第3の実施形態に係るレーダ装置は、第2の実施形態に係るレーダ装置にペアリングを適用して精度向上を図るようにしたものであるが、第1の実施形態に係るレーダ装置にペアリングを適用して精度向上を図るように構成することもできる。
【0078】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0079】
10 アンテナ
11 アンテナ送信素子
12 複数のアンテナ受信素子
20 送受信器
21 送信器
22 複数のミキサ
30 信号処理器
31 AD変換器
32 FFT部
33 DBF部
34 検出部
35 測角部
36 ビート周波数軸変換部
37 相関追尾部
38 X−Y軸変換部
39 ダウンアップ結合部
40 ペアリング処理部
41 相関追尾部
【技術分野】
【0001】
本発明の実施形態は、相関追尾により車両の速度を観測するレーダ装置に関する。
【背景技術】
【0002】
道路を走行する車両の速度をレーダ装置によって観測する場合は、他車両や背景といった複雑かつ多数の反射点が存在する中で目標車両を検出して相関追尾が行われる。このような環境下において、アンテナビーム幅が広く、FMCW(Frequency Modulated Continuous Wave)方式によるビート周波数軸の分解能が低い場合は、角度軸でも周波数軸でもメインローブの中に複数の反射点が存在することになる。このため、従来のダウンスイープとアップスイープのペアリングにより距離および速度を算出する方法では、ペアリングの誤りに起因するゴーストが生じる。なお、FMCW方式については、例えば『吉田孝監修、電子情報通信学会、“改訂レーダ技術”、pp.274-275(1996)』に説明されている。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】吉田孝監修、‘改定レーダ技術’、電子情報通信学会、pp.264-267(1996)
【非特許文献2】Paul R.KALATA,”A Generalized Parameter for α−β、α−β−γ Target Trackers ”,IEEE Trans. ,pp.174-181,AES VOL.AES-20,N0.2,MARCH 1984
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述したように、従来のレーダ装置では、ダウンスイープとアップスイープとをペアリングすることにより距離および速度を算出するので、ペアリングの誤りに起因するゴーストが生じ、安定した相関追尾ができないという問題がある。
【0005】
本発明は、ペアリングを不要にして、安定した相関追尾ができるレーダ装置を提供することを課題とする。
【課題を解決するための手段】
【0006】
上記の課題を解決するために、実施形態に係るレーダ装置は、FMCW方式のダウンスイープまたはアップスイープの信号を繰り返し送受信する送受信器と、送受信器からの信号に基づく測角値を用いてビート周波数の空間を表すfbx−fby軸に座標変換するビート周波数軸変換部と、ビート周波数軸変換部における変換によって得られたfbx−fby軸の空間において位置、速度および加速度を用いて相関追尾を行う相関追尾部と、相関追尾部における相関追尾によって得られた結果をX−Y軸の位置および速度に変換するX−Y軸変換部を備えたことを特徴とする。
【図面の簡単な説明】
【0007】
【図1】第1の実施形態に係るレーダ装置の構成を示すブロック図である。
【図2】第1の実施形態に係るレーダ装置の動作を示すフローチャートである。
【図3】第1の実施形態に係るレーダ装置で用いられるスイープ波形の例を示す図である。
【図4】第1の実施形態に係るレーダ装置で生じる誤差を説明するためのX−Y空間を示す図である。
【図5】第1の実施形態に係るレーダ装置で生じる誤差を説明するためのfbx−fby空間を示す図である。
【図6】第1の実施形態に係るレーダ装置で生じる誤差の例を説明するための図である。
【図7】第1の実施形態に係るレーダ装置で誤差が生じる原理を説明するための図である。
【図8】第1の実施形態に係るレーダ装置で残留する誤差を説明するための図である。
【図9】第2の実施形態に係るレーダ装置の構成を示すブロック図である。
【図10】第2の実施形態に係るレーダ装置の動作を示すフローチャートである。
【図11】第3の実施形態に係るレーダ装置の構成を示すブロック図である。
【図12】第3の実施形態に係るレーダ装置の動作を示すフローチャートである。
【図13】第3の実施形態に係るレーダ装置の動作を説明するための図である。
【図14】第1〜第3実施形態に係るレーダ装置で行われる相関追尾を説明するための図である。
【発明を実施するための形態】
【0008】
以下、実施形態について、図面を参照しながら詳細に説明する。
【0009】
(第1の実施形態)
第1の実施形態に係るレーダ装置において採用されている方式をFSAT(Frequency Space data Association and Tracking)と呼ぶ。図1は、第1の実施形態に係るレーダ装置の構成を示す系統図である。このレーダ装置は、アンテナ10、送受信器20および信号処理器30を備えている。
【0010】
アンテナ10は、アンテナ送信素子11と複数のアンテナ受信素子12とから構成されている。アンテナ送信素子11は、送受信器20から送信信号として送られてくる電気信号を電波に変換して外部に送出する。複数のアンテナ受信素子12は、外部からの電波を受信して電気信号に変換し、受信信号として送受信器20に送る。
【0011】
送受信器20は、送信器21と複数のミキサ22を備えており、複数のミキサ22は、複数のアンテナ受信素子12にそれぞれ対応して設けられている。一般的なアップチャープとダウンチャープの信号を送信信号として用いるFMCW方式の場合は、送信器21でスイープした送信信号を生成し、アンテナ送信素子11および複数のミキサ22に送る。複数のミキサ22は、複数のアンテナ受信素子12からそれぞれ受け取った受信信号を、送信器21からの信号に応じて周波数変換してビート周波数信号を生成し、信号処理器30に送る。
【0012】
信号処理器30は、AD変換器31、FFT部32、DBF部33、検出部34、測角部35、ビート周波数軸変換部36、相関追尾部37およびX−Y軸変換部38を備えている。
【0013】
AD変換器31は、送受信器20からアナログ信号として送られてくるビート周波数信号をデジタル信号に変換し、素子信号としてFFT部32に送る。FFT部32は、AD変換器31から送られてくる素子信号を高速フーリエ変換により周波数軸上の信号に変換し、DBF部33に送る。
【0014】
DBF部33は、FFT部32から送られてくる周波数軸上の信号を用いて、ΣビームとΔビームを形成する。このDBF部33で形成されたΣビームは検出部34に送られ、Δビームは測角部35に送られる。
【0015】
検出部34は、DBF部33から送られてくるΣビームに基づき距離および速度を検出し、それらを表す値をビート周波数軸変換部36に送る。また、検出部34は、DBF部33から送られてきたΣビームを測角部35に送る。
【0016】
測角部35は、検出部34から送られてくるΣビームおよびDBF部33から送られてくるΔビームを用いて、位相モノパルス測角方式により測角を行う。なお、位相モノパルス測角方式については、例えば『電子情報通信学会、“改訂レーダ技術”、pp.262-264(1996)』に説明されている。
【0017】
位相モノパルス測角の場合のビームは次式で表すことができる。
【数1】
【0018】
ここで、
bm(θ);Σビーム出力
en(θ);素子パターン(n=1〜N)
Wm(θ) ;複素ウェイト(n=1〜N)
n ;素子番号(n=1〜N)
λ ;波長
また、位相モノパルス測角の場合には、次式のΔビームを用いて測角することができる。
【数2】
【0019】
ここで、
Δm(θ) ; Δビーム出力
en(θ); 素子パターン
Wm(n) ; 複素ウェイト(n=1〜N)
n ; 素子番号(n=1〜N)
λ ; 波長
bmとΔmを用いて、誤差電圧εは、次式で表すことができる。
【数3】
【0020】
ここで、
* ;複素共役
この誤差電圧εと、予め保存されている誤差電圧εと測角値θの対応テーブル(または、多項式近似値)を用いて、測角値を算出できる。以上のようにして測角部35で算出された測角値は、ビート周波数軸変換部36に送られる。
【0021】
ビート周波数軸変換部36は、検出部34から送られてくる距離および速度を表す値と、測角部35から送られてくる測角値とに基づき、ビート周波数軸変換を行う。ここで、ΣビームとΔビームの信号をビート周波数fbで代表して表記すると、ビート周波数fbは、次のように表すことができる。
【数4】
【0022】
ここで、
fb:ビ−ト周波数
B :周波数帯域
T :スイープ時間
R :距離
c :光速
V :速度
λ :波長
kr:2B/(Tc)
kv:λ/2
ビート周波数fbの微分、更にその微分で表現すると、次の通りである。
【数5】
【0023】
これらを距離R、速度Vおよび加速度Aで表現すると、次の通りである。
【数6】
【0024】
ここで、
R:距離
V:速度
A:加速度
これを、測角値θを用いてX−Y軸に変換できる。
【数7】
【0025】
ここで、
fb; ビート周波数
θ ; 測角値
このようにしてビート周波数軸変換部36においてfbx−fbyに座標変換された結果(fbxおよびfby)は、相関追尾部37に送られる。
【0026】
相関追尾部37は、ビート周波数軸変換部36から送られてくるfbxおよびfbyの空間で、位置、速度および加速度を用いて相関追尾処理を実行する。
【0027】
上述したfbxおよびfbyは、1回微分と2回微分を用いて、等加速度運動(加速度の時間微分は0)とすると、次式で表現できる。
【数8】
【0028】
fbxとfbyの速度(1回微分)と加速度(2回微分)まで観測すれば、(8)式と(9)式に代入して、位置(xs、ys)と速度(vxs、vys)を算出することができる。
【0029】
このfbxとfbyの速度、加速度は、例えばαβγフィルタを用いると、次式で表される(図14参照)。なお、αβγフィルタについては、例えば非特許文献1および非特許文献2に追尾フィルタとして説明されているので、必要に応じて参照されたい。
【数9】
【0030】
初期値は次の通りである。
【数10】
【0031】
この相関追尾を用いて平滑値を算出し、(8)〜(10)式を用いて、位置(xs、ys)と速度(vxs、vys)を算出することができる。相関追尾部37における相関追尾処理により得られる平滑値および予測値は、X−Y軸変換部38に送られる。
【0032】
X−Y軸変換部38は、相関追尾部37から送られてきた平滑値および予測値をX−Y軸の位置および速度に変換し、外部に送る。
【0033】
次に、第1の実施形態に係るレーダ装置の動作を、図2に示すフローチャートを参照しながら説明する。最初に、信号処理が行われる(ステップS10)。具体的には、まず、ダウン送受信が行われる(ステップS11)。すなわち、送受信器20では、送信器21で生成されたダウンスイープの送信信号を、アンテナ10のアンテナ送信素子11および複数のミキサ22に送る。アンテナ送信素子11は、送受信器20から送信信号として送られてくる電気信号を電波に変換して外部に送出する。アンテナ10の複数のアンテナ受信素子12は、外部からの電波を受信して電気信号に変換し、受信信号として送受信器20に送る。送受信器20に含まれる複数のミキサ22は、複数のアンテナ受信素子12からそれぞれ受け取った受信信号を、送信器21からの信号に応じて周波数変換してビート周波数信号を生成し、信号処理器30に送る。
【0034】
信号処理器30においては、AD変換器31は、送受信器20からアナログ信号として送られてくるビート周波数信号をデジタル信号に変換し、素子信号としてFFT部32に送る。FFT部32は、AD変換器31から送られてくる素子信号を高速フーリエ変換により周波数軸上の信号に変換し、DBF部33に送る。DBF部33は、FFT部32から送られてくる周波数軸上の信号を用いて、ΣビームとΔビームを形成し、それぞれ検出部34および測角部35に送る。検出部34は、DBF部33から送られてくるΣビームに基づき距離および速度を検出し、それらを表す値をビート周波数軸変換部36に送る。また、検出部34は、DBF部33から送られてきたΣビームを測角部35に送る。
【0035】
次いで、測角値θbが算出される(ステップS13)。すなわち、測角部35は、検出部34から送られてくるΣビームおよびDBF部33から送られてくるΔビームを用いて、位相モノパルス測角方式により測角を行い、測角値θbをビート周波数軸変換部36に送る。
【0036】
次いで、fbx−fbyへの座標変換が行われる(ステップS14)。すなわち、ビート周波数軸変換部36は、検出部34から送られてくる距離および速度を表す値と、測角部35から送られてくる測角値とに基づき、ビート周波数軸変換を行い、fbx−fbyに座標変換された結果(fbxおよびfby)を相関追尾部37に送る。
【0037】
次いで、グルーピング処理が行われる(ステップS20)。このグルーピング処理はオプションであり、複数ビームを形成する場合に実行される。グルーピング処理の内容は後述する。
【0038】
次いで、相関追尾処理が行われる(ステップS30)。この相関追尾処理は、相関処理部37において実行される。相関追尾処理においては、まず、相関処理が行われる(ステップS31)。すなわち、NN値が抽出される。次いで、初航跡が確立される(ステップS32)。次いで、fbx、fby空間におけるαβγ追尾が行われる(ステップS33)。すなわち、fbx、fbyの平滑値が算出される。次いで、fbx、fbyの平滑値より、X、Y、Vx、Vy、AxおよびAyが算出される(ステップS34)。
【0039】
以上の相関追尾処理が終了すると、次いで、平滑値のフィルタ処理が行われる(ステップS40)。これにより、平滑位置および平滑速度が出力される。その後、信号処理S10のステップS11に戻り、上述した処理が繰り返される。
【0040】
図3は、第1の実施形態で用いられるスイープ波形の例を示す。スイープ波形としては、ダウンスイープまたはアップスイープの一方のみでよいが、一般的にダウンスイープとアップスイープの組み合わせで表現している。相関追尾のためのサイクルタイム(相関追尾の時間間隔)内のスイープを、一般にNスイープとした場合、NスイープのFFT波形の同一ビート周波数において、振幅積分した結果によりスレショルド判定して検出した後、検出バンク(ビート周波数バンク)において、Nスイープ分の測角を行い、測角値を平均することにより、測角値の精度を高めることができる。
【0041】
また、上述したグルーピング処理は、以下のように構成できる。グルーピング処理においては、まず、複数ビーム間合成が行われる(ステップS21)。すなわち、複数ビーム間の観測値(fbx、fby)が合成される。次いで、グルーピングが行われる(ステップS22)。すなわち、複数の観測値の中から、振幅値の大きい順から極値を抽出し、抽出点のビート周波数軸の周りに所定のゲートを形成し、そのゲート内にある観測値(ビート周波数)を各振幅値により重みづけするといった重心演算を用いて、複数点をグルーピングする。このグルーピングした結果は相関追尾部37に送られる。
【0042】
また、(fbx、fby)より、位置および速度の平滑値を算出後、路肩反射点の速度(自車両速度)や路肩位置等によるフィルタを適用して、不要点を抑圧する処理を付加するように構成することもできる。
【0043】
以上説明したように、第1の実施形態に係るレーダ装置によれば、ダウンスイープまたはアップスイープのみの繰り返しスイープを用いて、ビート周波数を観測し、ビート周波数空間で相関追尾し、相関追尾の結果(平滑値および予測値)を用いてX−Y軸に変換するので、ダウンスイープとアップスイープのペアリングが不要であり、誤ペアリングによるゴーストは生じない。その結果、複雑な背景下においても、目標の観測位置精度を高めて、安定した相関追尾を実現できる。
【0044】
(第2の実施形態)
第2の実施形態に係るレーダ装置において採用される方式をIFSAT(;Improved FSAT)と呼ぶ。上述した第1の実施形態に係るレーダ装置では、ダウンスイープまたはアップスイープの一方のみを用いている。この場合、fbx−fby空間とX−Y空間の関係により、非線形の誤差が生じる。まず、この誤差について説明する。
【0045】
X−Y空間とfbx−fby空間の測角値θが等しいものとし、等加速度運動を前提とすると、図4および図5を参照して、ビート周波数fb、その1回微分および2回微分は次式で表現できる。
【数11】
【0046】
(15)式をx、y成分に分離すると次式で表すことができる。ただし、等加速度運動(加速度の時間微分は0)とする。
【数12】
【0047】
ここで、
xs、ys :位置の平滑値
vxs、vys:速度の平滑値
axs,ays:加速度の平滑値
θ :測角値
(8)式と(16)式、(9)式と(17)式を比較する。左辺のfbx、fbyを両者で等しいとすると、
(8)式→(16)式
xs→xs・sinθ
vxs→vxs・sinθ
axs→axs・sinθ
(9)式→(17)式
ys→ys・cosθ
vys→vys・cosθ
ays→ays・cosθ
が対応しており、θによる誤差分があることがわかる。これは、fbとθより、fbxとfbyを(7)式の関係で定義したものと、(16)および(17)式で定義したfbxとfbyが異なり、実装上は簡単化のため(7)〜(14)式を用いて処理するために生じる誤差である。この誤差の一例を図6に示す。
【0048】
ダウンスイープで目標がX軸一定で、Y軸に沿って近づく場合は、ビート周波数空間では、近距離広角において、図6(a)に示すように、距離によるビート周波数成分frと速度によるビート周波数成分fdが加算され、外側に膨らむような航跡となる。この原理を、アップスイープの場合と合わせて、図7に示す。
【0049】
ダウンスイープの場合は、距離によるビート周波数fbrと近づく速度によるビート周波数fbvは同一の正の周波数となる。一方、アップスイープの場合には、距離によるビート周波数fbrは負の周波数となり、近づく速度によるビート周波数fbvは正の方向の周波数となる。これを正の周波数として観測すると、折り返した周波数となり、ダウンスイープの場合とアップスイープの場合では、図8に示すような関係となる。これを(8)および(9)式により、X−Y軸に換算すると、上述した誤差が残留し、図8(b)に示すように、実際の車両の軌跡が直線の場合であっても、若干ずれた位置に観測される。
【0050】
次に、この誤差を補正する手法を考える。ダウンスイープとアップスイープの場合の軌跡は、X−Y軸に変換すると、図8(b)に示すように、真値の軌跡に対して左右の逆方向に誤差が残留する。この逆方向へのズレを利用して、ダウンスイープとアップスイープの各々のX−Y軸に換算後の出力であるダウンスイープのXY換算値(xsd、ysd)とアップスイープのXY換算値(xsu,ysu)が所定のゲート範囲内にあれば、一般に、次式で結合することにより、位置精度を改善できる。
【数13】
【0051】
ここで、
(xs,ys) ;結合後のX−Y軸の位置
(xsd,ysd);ダウンスイープのX−Y軸換算後の位置
(xsu,ysu);アップスイープのX−Y軸換算後の位置
Wd ;ダウンスイープに対する重みづけ
Wu ;アップスイープに対する重みづけ=(1−Wd)
重みづけの例としては、ダウンスイープとアップスイープを均等にすればWd=Wu=0.5とすることができる。図8(b)に示すIFSAT補正値は、ダウンスイープのXY換算値とアップスイープのXY換算値とが重み付けされた値である。
【0052】
図9は、上述した誤差の補正を実現するための第2の実施形態に係るレーダ装置の構成を示す系統図である。このレーダ装置は、図1に示した第1の実施形態に係るレーダ装置の信号処理部30にダウンアップ結合部39が追加されて構成されている。
【0053】
ダウンアップ結合部39は、X−Y軸変換部38から送られてきたダウンスイープに基づく平滑値とアップスイープに基づく平滑値を結合し、外部に送る。
【0054】
次に、第2の実施形態に係るレーダ装置の動作を、図10に示すフローチャートを参照しながら説明する。最初に、信号処理が行われる(ステップS15)。この信号処理は、第1の実施形態のステップS10(図2参照)の処理が、ダウンスイープとアップスイープの信号を交互に送受信するダウン/アップ信号処理(ステップS16)に変更されている点を除けば、第1の実施形態のそれと同じである。
【0055】
次いで、グルーピング処理が行われる(ステップS20)。このグルーピング処理は、第1の実施形態のそれと同様にオプションであり、複数ビームを形成する場合に実行される。
【0056】
次いで、相関追尾処理が行われる(ステップS30)。この相関追尾処理は、ダウンスイープとアップスイープに対する処理が交互に行われる点を除けば、上述した第1の実施形態のそれと同じである。次いで、ダウン・アップ平滑値結合が行われる(ステップS50)、すなわち、ダウンアップ結合部39は、X−Y軸変換部38から送られてきたダウンスイープに基づく平滑値とアップスイープに基づく平滑値を結合する。
【0057】
次いで、平滑値のフィルタ処理が行われる(ステップS40)。これにより、平滑位置および平滑速度が出力される。その後、信号処理S10のステップS16に戻り、上述した処理が繰り返される。
【0058】
なお、ゲートとしては、位置ゲートの他に、速度ゲートを用いて、ダウンスイープとアップスイープの速度である(vxd、vyd)と(vxu,vyu)が所定の範囲内にあるという条件を追加するように構成できる。
【0059】
以上説明したように、第2の実施形態に係るレーダ装置によれば、ダウンスイープとアップスイープの各々について第1の実施形態に係るレーダ装置により得られた結果を用いて、X−Y軸上で相関をとり、重みづけ平均化するので、位置および速度の精度を向上できる。
【0060】
(第3の実施形態)
第3の実施形態に係るレーダ装置において採用されている方式をAFSAT(Advanced FSAT)と呼ぶ。上述した第2の実施形態に係るレーダ装置では、ダウンスイープとアップスイープの位置の結合を用いるので、誤差を補正した位置を算出できる。
【0061】
第3の実施形態に係るレーダ装置は、更に精度の高い位置を算出するようにしたものである。従来のレーダ装置においては、誤ペアリングにより、ゴーストが発生するという問題が存在するが、ペアリングが正しければ、より精度の高い位置を算出できる。ここでは、簡単のためダウンスイープとアップスイープによるペアリングを用いた測距測速方式をMPAT(Measured Pairing data Association and Tracking)と呼ぶ。
【0062】
図11は、MPAT方式を用いたレーダ装置の構成を示すブロック図である。このレーダ装置は、図9に示した第2の実施形態に係るレーダ装置の信号処理部30にペアリング処理部40および相関追尾部41が追加されて構成されている。
【0063】
ペアリング処理部40は、測角部35からダウンスイープとアップスイープの各々に対する測角値を取得し、両者の測角値が所定の範囲にあるものをペアリングし、(19)式を用いて、距離および速度を算出する。このペアリング処理部40で算出された距離および速度は、相関追尾部41に送られる。
【数14】
【0064】
ここで、
B ;周波数帯域
R ;目標距離
T ;スイープ時間
c ;光速
V ;目標速度
λ ;波長
Δf1;ダウンチャープ信号の観測周波数
Δf2;アップチャープ信号の観測周波数
fd ;ドップラー周波数
fr ;距離による周波数
相関追尾部41は、ペアリング処理部40から送られてくる距離および速度により相関追尾を実施し、距離および速度の平滑値を算出してダウンアップ結合部39に送る。この平滑値の中には、図13に示すように、誤ペアリングによるゴーストであるMPATゴーストmも含まれているので、これを排除するために、第2の実施形態で算出した位置X−Y(IFSAT)aを中心に相関ゲートcgを形成し、ペアリングにより算出したX−Y(MPAT)mが相関ゲート内にある場合は、X−Y(IFSAT)aの結果を置き換える。また、置き換える際にX−Yの位置の差により段差が生じることを防ぐために、次式に示すようにIFSATとMPATのX−Yの値に重みづけする。
【数15】
【0065】
ここで、
(xs,ys) ;結合後のX−Y軸の位置
(xsa,ysa) ;IFSATのX−Y軸の位置
(xsm,ysm) ;MPATのX−Y軸の位置
Wa ;IFSATに対する重みづけ
Wm ;MPATに対する重みづけ=(1−Wa)
重みづけの例としては、IFSATとMPATを均等にすればWa=Wm=0.5とすればよい。
【0066】
なお、IFSATとMPATの相関をとる際には、両者の速度が所定の範囲内になるという条件を追加するように構成できる。
【0067】
次に、第3の実施形態に係るレーダ装置の動作を、図12に示すフローチャートを参照しながら説明する。
【0068】
最初に、信号処理が行われる(ステップS17)。この信号処理は、ステップS17の処理に、角度ゲート処理(ステップS18)および第1ペアリング処理(ステップS19)が追加されている点を除けば、第2の実施形態のステップS15(図10参照)で行われる信号処理と同じである。この信号処理では、まず、上述した第2の実施形態と同様に、ステップS16→ステップS12→ステップS13→ステップS14の処理が行われる。
【0069】
次いで、グルーピング処理が行われる(ステップS20)。このグルーピング処理は、第1の実施形態のそれと同様にオプションであり、複数ビームを形成する場合に実行される。次いで、相関追尾処理が行われる(ステップS30)。この相関追尾処理は、上述した第2の実施形態のそれと同じである。
【0070】
次いで、ダウン・アップ平滑値結合(近距離)が行われる(ステップS50)、すなわち、ダウンアップ結合部39は、X−Y軸変換部38から送られてきたダウンスイープに基づく平滑値とアップスイープに基づく平滑値を結合する。
【0071】
上記ステップS17、S20、S30およびS40の処理と並行して、以下の処理が行われる。すなわち、信号処理では、ステップS14の処理が終了すると、角度ゲート処理が行われる(ステップS18)。すなわち、ペアリング処理部40は、相関ゲートを形成する。次いで、第1ペアリング処理が行われる(ステップS19)。すなわち、ペアリング処理部40は、測角部35からダウンスイープとアップスイープの各々に対する測角値を取得し、両者の測角値が所定の範囲にあるものをペアリングして距離および速度を算出し、相関追尾部41に送る。
【0072】
次いで、グルーピング処理が行われる(ステップS20a)。このグルーピング処理は、第1の実施形態のそれと同様にオプションであり、複数ビームを形成する場合に実行される。次いで、相関追尾処理が行われる(ステップS30a)。この相関追尾処理は、上述したステップS30の処理からステップS34の処理、つまりfbx、fbyの平滑値よりX、Y、Vx、Vy、AxおよびAyを算出する処理を除去したものである。
【0073】
次いで、相関があれば置き換える処理が行われる(ステップS60)。すなわち、相関追尾部41は、ペアリングにより算出したX−Y(MPAT)mが相関ゲートcg内にある場合は、X−Y(IFSAT)iの結果を置き換える。
【0074】
次いで、平滑値結合が行われる(ステップS70)。すなわち、ダウンアップ結合部39は、X−Y軸変換部38から送られてきたダウンスイープに基づく平滑値とアップスイープに基づく平滑値を結合した結果に、更に、相関追尾部41から送られてきた平滑値を結合する。
【0075】
次いで、平滑値のフィルタが行われる(ステップS40)。その後、ステップS16に戻り、上述した処理が繰り返される。
【0076】
以上説明したように、第3の実施形態に係るレーダ装置によれば、第2の実施形態に係るレーダ装置により得られた結果と、ダウンスイープとアップスイープによるペアリング結果の観測値を用いた相関追尾の結果との相関をとるので、ダウンスイープーアップスイープの誤ペアリングによるゴーストを抑えつつ、位置および速度の精度を向上できる。
【0077】
なお、上述した第3の実施形態に係るレーダ装置は、第2の実施形態に係るレーダ装置にペアリングを適用して精度向上を図るようにしたものであるが、第1の実施形態に係るレーダ装置にペアリングを適用して精度向上を図るように構成することもできる。
【0078】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0079】
10 アンテナ
11 アンテナ送信素子
12 複数のアンテナ受信素子
20 送受信器
21 送信器
22 複数のミキサ
30 信号処理器
31 AD変換器
32 FFT部
33 DBF部
34 検出部
35 測角部
36 ビート周波数軸変換部
37 相関追尾部
38 X−Y軸変換部
39 ダウンアップ結合部
40 ペアリング処理部
41 相関追尾部
【特許請求の範囲】
【請求項1】
FMCW方式のダウンスイープまたはアップスイープの信号を繰り返し送受信する送受信器と、
前記送受信器からの信号に基づく測角値を用いてビート周波数の空間を表すfbx−fby軸に座標変換するビート周波数軸変換部と、
前記ビート周波数軸変換部における変換によって得られたfbx−fby軸の空間において位置、速度および加速度を用いて相関追尾を行う相関追尾部と、
前記相関追尾部における相関追尾によって得られた結果をX−Y軸の位置および速度に変換するX−Y軸変換部と、
を備えることを特徴とするレーダ装置。
【請求項2】
FMCW方式のダウンスイープおよびアップスイープの信号を繰り返し送受信する送受信器と、
前記送受信器からのダウンスイープおよびアップスイープの信号の各々において、該信号に基づく測角値を用いてビート周波数の空間を表すfbx−fby軸に座標変換するビート周波数軸変換部と、
前記ビート周波数軸変換部における変換によって得られたfbx−fby軸の空間において位置、速度および加速度を用いて相関追尾を行う相関追尾部と、
前記相関追尾部における相関追尾によって得られた結果をX−Y軸の位置および速度に変換するX−Y軸変換部と、
前記X−Y軸変換部で得られたダウンスイープとアップスイープの位置または速度の少なくとも一方の差が所定値以下であれば、該位置、速度または加速度を重みづけして結合した値を求めるダウンアップ結合部と、
を備えることを特徴とするレーダ装置。
【請求項3】
ダウンスイープとアップスイープの各々に対する測角値が所定の範囲にあるものをペアリングするペアリング処理部と、
前記ペアリング処理部におけるペアリングにより得られた距離および速度により相関追尾を実施して距離および速度の平滑値を算出する他の相関追尾部を備え、
前記ダウンアップ結合部は、前記他の相関追尾部により得られた平滑値と、前記相関追尾部により得られた平滑値の位置および速度の少なくとも1つの差が所定値以下であれば、該位置、速度または加速度を重みづけして結合した値を求めることを特徴とする請求項2記載のレーダ装置。
【請求項4】
ダウンスイープまたはアップスイープに対する測角値が所定の範囲にあるものをペアリングするペアリング処理部と、
前記ペアリング処理部におけるペアリングにより得られた距離および速度により相関追尾を実施して距離および速度の平滑値を算出する他の相関追尾部と、
前記他の相関追尾部により得られた平滑値と、前記相関追尾部により得られた平滑値の位置および速度の少なくとも1つの差が所定値以下であれば、該位置、速度または加速度を重みづけして結合した値を求めるダウンアップ結合部とを備えることを特徴とする請求項1記載のレーダ装置。
【請求項1】
FMCW方式のダウンスイープまたはアップスイープの信号を繰り返し送受信する送受信器と、
前記送受信器からの信号に基づく測角値を用いてビート周波数の空間を表すfbx−fby軸に座標変換するビート周波数軸変換部と、
前記ビート周波数軸変換部における変換によって得られたfbx−fby軸の空間において位置、速度および加速度を用いて相関追尾を行う相関追尾部と、
前記相関追尾部における相関追尾によって得られた結果をX−Y軸の位置および速度に変換するX−Y軸変換部と、
を備えることを特徴とするレーダ装置。
【請求項2】
FMCW方式のダウンスイープおよびアップスイープの信号を繰り返し送受信する送受信器と、
前記送受信器からのダウンスイープおよびアップスイープの信号の各々において、該信号に基づく測角値を用いてビート周波数の空間を表すfbx−fby軸に座標変換するビート周波数軸変換部と、
前記ビート周波数軸変換部における変換によって得られたfbx−fby軸の空間において位置、速度および加速度を用いて相関追尾を行う相関追尾部と、
前記相関追尾部における相関追尾によって得られた結果をX−Y軸の位置および速度に変換するX−Y軸変換部と、
前記X−Y軸変換部で得られたダウンスイープとアップスイープの位置または速度の少なくとも一方の差が所定値以下であれば、該位置、速度または加速度を重みづけして結合した値を求めるダウンアップ結合部と、
を備えることを特徴とするレーダ装置。
【請求項3】
ダウンスイープとアップスイープの各々に対する測角値が所定の範囲にあるものをペアリングするペアリング処理部と、
前記ペアリング処理部におけるペアリングにより得られた距離および速度により相関追尾を実施して距離および速度の平滑値を算出する他の相関追尾部を備え、
前記ダウンアップ結合部は、前記他の相関追尾部により得られた平滑値と、前記相関追尾部により得られた平滑値の位置および速度の少なくとも1つの差が所定値以下であれば、該位置、速度または加速度を重みづけして結合した値を求めることを特徴とする請求項2記載のレーダ装置。
【請求項4】
ダウンスイープまたはアップスイープに対する測角値が所定の範囲にあるものをペアリングするペアリング処理部と、
前記ペアリング処理部におけるペアリングにより得られた距離および速度により相関追尾を実施して距離および速度の平滑値を算出する他の相関追尾部と、
前記他の相関追尾部により得られた平滑値と、前記相関追尾部により得られた平滑値の位置および速度の少なくとも1つの差が所定値以下であれば、該位置、速度または加速度を重みづけして結合した値を求めるダウンアップ結合部とを備えることを特徴とする請求項1記載のレーダ装置。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】

【図7】

【図8】
【図9】

【図10】

【図11】

【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2012−2686(P2012−2686A)
【公開日】平成24年1月5日(2012.1.5)
【国際特許分類】
【出願番号】特願2010−138277(P2010−138277)
【出願日】平成22年6月17日(2010.6.17)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成24年1月5日(2012.1.5)
【国際特許分類】
【出願日】平成22年6月17日(2010.6.17)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]