
レーダ装置
【課題】異る周波数変調率で変調された受信ビート信号のビート周波数を組合せて目標距離を算出するレーダで、異る目標の振幅値及び測角値が閾値以内では目標の正しい組合せができず、又複数目標のビート周波数差がビート周波数分解能以下では信号を分離できない。
【解決手段】アンビギュイティのない距離分解能と、ビート周波数分解能からのパラメータで選択した周波数変調率で複数のPRIに亘りチャープ状に周波数変調されたキャリア信号を放射、目標での反射信号を受信し、キャリア信号で変換した受信ビート信号にPRI間FFTを行い作成したPRI内距離−ビート周波数マップから、検出した目標候補同士を組合せ、目標候補のビート周波数の組合せからアンビギュイティのない距離及び速度を算出、アンビギュイティのない距離によりPRI内距離の距離アンビギュィティを解消し目標との距離を算出する。
【解決手段】アンビギュイティのない距離分解能と、ビート周波数分解能からのパラメータで選択した周波数変調率で複数のPRIに亘りチャープ状に周波数変調されたキャリア信号を放射、目標での反射信号を受信し、キャリア信号で変換した受信ビート信号にPRI間FFTを行い作成したPRI内距離−ビート周波数マップから、検出した目標候補同士を組合せ、目標候補のビート周波数の組合せからアンビギュイティのない距離及び速度を算出、アンビギュイティのない距離によりPRI内距離の距離アンビギュィティを解消し目標との距離を算出する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、異なる周波数変調率で周波数変調された受信ビート信号のビート周波数の組み合わせを決定し、目標物までの距離を算出するレーダ装置に関するものである。
【背景技術】
【0002】
ここでは、この発明に係わるビート周波数の組み合わせを、振幅値または測角値を用いて決定し、複数目標までの距離を測定する特開08-262131号公報(特許文献1)で示されたレーダ装置について説明する。
【0003】
特許文献1で示されたレーダ装置は、アップチャープの周波数変調を施した信号を送信し、目標物からその反射波を受信した後、周波数変調率の絶対値が等しいダウンチャープの周波数変調を施した信号を送信し、目標物からその反射波を受信し、それぞれの受信信号を高速フーリエ変換 (FFT: Fast Fourier Transform) することによりビート周波数を求める。複数目標の場合、アップチャープとダウンチャープの周波数変調を施した信号を送受信により、それぞれ複数のビート周波数のピークが得られるため、それらビート周波数の組み合わせを求める必要がある。
【0004】
ここで、図26と図27とを参照しながら、特許文献1で示されたレーダ装置における受信ビート信号の振幅値または測角値を用いて受信ビート信号のビート周波数の組み合わせを決定する方法について説明する。図26では、受信ビート信号の振幅値を用いて受信ビート信号のビート周波数の組み合わせを決定する方法を示し、図27では測角値を用いて受信ビート信号のビート周波数の組み合わせを決定する方法を示す。
【0005】
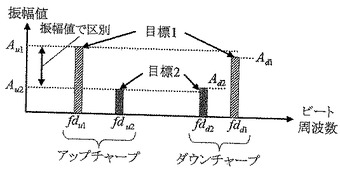
図26の横軸は受信ビート信号のビート周波数、縦軸は振幅である。図27の横軸は受信ビート信号のビート周波数、縦軸は測角値である。図26において、fdu1は目標1のアップチャープ時のビート周波数、fdu2は目標2のアップチャープ時のビート周波数、fdd1は目標1のダウンチャープ時のビート周波数、fdd2は目標2のダウンチャープ時のビート周波数、Au1は目標1のアップチャープ時のビート周波数fdu1の振幅、Au2は目標2のアップチャープ時のビート周波数fdu2の振幅、Ad1は目標1のダウンチャープ時のビート周波数fdd1の振幅、Ad2は目標2のダウンチャープ時のビート周波数fdd2の振幅である。
【0006】
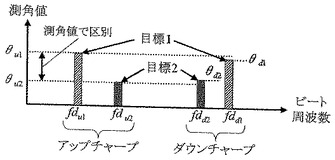
また、図27において、fdu1は目標1のアップチャープ時のビート周波数、fdu2は目標2のアップチャープ時のビート周波数、fdd1は目標1のダウンチャープ時のビート周波数、fdd2は目標2のダウンチャープ時のビート周波数、θu1は目標1のアップチャープ時のビート周波数fdu1の測角値、θu2は目標2のアップチャープ時のビート周波数fdu2の測角値、θd1は目標1のダウンチャープ時のビート周波数fdd1の測角値、θd2は目標2のダウンチャープ時のビート周波数fdd2の測角値である。
【0007】
図26では、目標1のアップチャープ時のビート周波数fdu1の振幅Au1と目標1のダウンチャープ時のビート周波数fdd1の振幅Ad1および目標2のアップチャープ時のビート周波数fdu2の振幅Au2と目標2のダウンチャープ時のビート周波数fdd2の振幅Ad2との差が閾値以内となっており、それ以外、例えば、目標1のアップチャープ時のビート周波数fdu1の振幅Au1と目標2のダウンチャープ時のビート周波数fdd2の振幅Ad2との差や、目標1のダウンチャープ時のビート周波数fdd1の振幅Ad1と目標2のアップチャープ時のビート周波数fdu2と振幅Au2との差は閾値以上であることから、目標1のアップチャープ時のビート周波数fdu1と目標1のダウンチャープ時のビート周波数fdd1および目標2のアップチャープ時のビート周波数fdu2と目標2のダウンチャープ時のビート周波数fdd2について組み合わせを行う。
【0008】
図27では、図26と同様、目標1のアップチャープ時のビート周波数fdu1の測角値θu1と目標1のダウンチャープ時のビート周波数fdd1の測角値θd1および目標2のアップチャープ時のビート周波数fdu2の測角値θu2と目標2のダウンチャープ時のビート周波数fdd2の測角値θd2との差が閾値以内となっており、それ以外、例えば、目標1のアップチャープ時のビート周波数fdu1の測角値θu1と目標2のダウンチャープ時のビート周波数fdd2の測角値θd2との差や、目標1のダウンチャープ時のビート周波数fdd1の測角値θd1と目標2のアップチャープ時のビート周波数fdu2との測角値θu2との差は閾値以上であることから、目標1のアップチャープ時のビート周波数fdu1と目標1のダウンチャープ時のビート周波数fdd1および目標2のアップチャープ時のビート周波数fdu2と目標2のダウンチャープ時のビート周波数fdd2について組み合わせを行う。
【0009】
このレーダ装置では、以上の方法で、ビート信号の振幅値または測角値の差が閾値以内となる信号のビート周波数を組み合わせ、ビート周波数の速度項を消去することにより、測距を行う。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開平08-262131号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
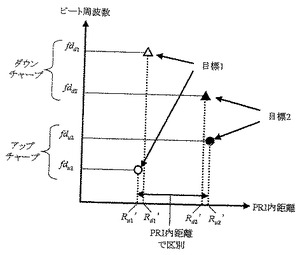
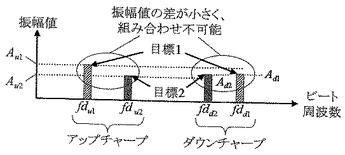
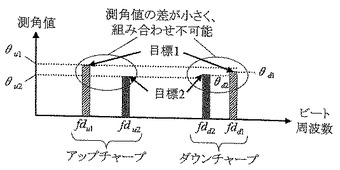
しかし、図28、図29に示すように、異なる目標の振幅値および測角値が閾値以内となった場合、目標を正しく組み合わせることができないという問題がある。
【0012】
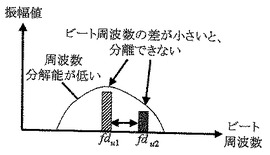
また、複数目標のビート周波数差がビート周波数の分解能以下となる場合、このレーダ装置では、図30に示すように信号を分離できないという問題がある。
【0013】
この発明の目的は、異なる目標の振幅値や測角値の差が閾値以内となる場合でも、ビート周波数の組み合わせを決定し、高分解能に目標までの距離を算出でき、かつ、複数目標のビート周波数差がビート周波数の分解能以下となる場合でも、信号を分離し、目標までのそれぞれの距離を算出可能なレーダ装置を提供することである。
【課題を解決するための手段】
【0014】
この発明に係るレーダ装置は、
PRI (Pulse Repetition Interval) 内距離の距離アンビギュィティを解消できるアンビギュイティのない距離の分解能と、ビート周波数分解能よりPRI内距離分解能が高精度になるようなパラメータに基づき送信信号の異なる周波数変調率を複数選択し、得られた周波数変調率で複数のPRIに渡ってチャープ上に周波数変調されたキャリア信号を放射する送信手段と、
目標で反射して戻った前記送信手段から得られる送信信号を受信信号として受信し、この受信信号に対して、前記送信手段から得られる前記キャリア信号を用いてダウンコンバートし受信ビート信号に変換する受信手段と、
前記受信手段から得られる受信ビート信号に対しPRI間FFT (Fast Fourier Transform) を行い、目標との相対距離を算出するためのPRI内距離−ビート周波数マップを作成するPRI内距離−ビート周波数マップ作成手段と、
前記PRI内距離−ビート周波数マップ作成手段から得られるPRI内距離−ビート周波数マップに対し、信号の強度に基づき目標候補を検出する目標候補検出手段と、
前記目標候補検出手段から得られる目標候補に対し、PRI内距離を用いて目標候補同士を組み合わせる組み合わせ手段と、
前記組み合わせ手段により得られる組み合わせを用いて、目標候補のビート周波数を組み合わせ、アンビギュイティのない距離および速度を算出する距離速度算出手段と、
前記距離速度算出手段により得られるアンビギュイティのない距離を用いて、PRI内距離の距離アンビギュィティを解消し目標との相対距離を算出する距離高分解能化手段と
を備える。
【発明の効果】
【0015】
この発明に係るレーダ装置によれば、
複数目標が高分解能できるPRI内距離情報を用いることにより、多目標に対処可能で、かつ、距離アンビギュィティの無い高分解能な距離を算出可能なレーダ装置を得ることができる。また、振幅値と測角値の差が小さい場合にも、高分解能なPRI内距離を用いることで、複数目標の距離を得ることが可能になる。さらに、従来のレーダ装置では、信号分離性能が、分解能の低いビート周波数の分解能に依存しており、ビート周波数の差が周波数分解能よりも小さい場合、信号の分離ができなかったが、この発明に係るレーダ装置では、高分解能なPRI内距離の分解能で信号を分離することができるため、目標分離性能が高い効果を有する。
【図面の簡単な説明】
【0016】
【図1】この発明の実施の形態1に係るレーダ装置の構成図である。
【図2】アップチャープの場合における周波数変調とパルス内符号変調した送信信号と受信信号の関係の説明図である。
【図3】アップチャープの場合におけるPRI (Pulse Repetition Interval)内距離−ビート周波数マップの説明図である。
【図4】実施の形態1における送信信号帯域幅が等しいアップチャープとダウンチャープの場合の局部発振信号(キャリア信号)の周波数時間変化の説明図である。
【図5】局部発振信号の周波数時間変化(送信信号帯域幅が異なるアップチャープとダウンチャープの場合)の説明図である。
【図6】局部発振信号の周波数時間変化(送信信号帯域幅が異なるアップチャープ同士の場合)の説明図である。
【図7】局部発振信号の周波数時間変化(送信信号帯域幅が異なるダウンチャープ同士の場合)の説明図である。
【図8】パルス内変調信号発生器が生成する4bit Barkerコードの説明図である。
【図9】信号処理器の受信ビート信号に対する処理ブロック図である。
【図10】CFAR処理に関わる注目セル、ガードセル、サンプルセルの説明図である。
【図11】CFAR処理の結果によるCFAR閾値 CFAR_th (kh,l) を越えるセルが集合した場合の処理内容を説明する図である。
【図12】組み合わせ手段によるPRI内距離判定方法の説明図である。
【図13】組み合わせ手段による複数目標の場合のビート周波数組み合わせ方法の説明図である。
【図14】この発明の実施の形態2に係るレーダ装置の構成図である。
【図15】実施の形態2における信号処理器の受信ビート信号に対する処理ブロック図である。
【図16】地上クラッタサイドローブの影響を示す説明図である。
【図17】目標が地上クラッタサイドローブに埋もれる場合を示す図である。
【図18】フィルタ処理手段のフィルタ特性を示す説明図である。
【図19】フィルタ処理手段によるフィルタ処理の効果を示す説明図である。
【図20】この発明の実施の形態3に係るレーダ装置の構成図である。
【図21】実施の形態3における信号処理器の受信ビート信号に対する処理ブロック図である。
【図22】相関処理の際に窓関数処理を行う効果を示す説明図である。
【図23】PRI間FFTの際に窓関数処理を行う効果を示す説明図である。
【図24】この発明の実施の形態4に係るレーダ装置の構成図である。
【図25】段階的な周波数変調とパルス内符号変調した送信信号と受信信号の関係の説明図である。
【図26】特許文献1で示された従来のレーダ装置の振幅値を用いたビート周波数組み合わせ方法の説明図である。
【図27】特許文献1で示された従来のレーダ装置の測角値を用いたビート周波数組み合わせ方法の説明図である。
【図28】特許文献1で示された従来のレーダ装置の振幅値で組み合わせを解くことができない場合の説明図である。
【図29】特許文献1で示された従来のレーダ装置の測角値で組み合わせを解くことができない場合の説明図である。
【図30】特許文献1で示された変調周波数がアップチャープ時における従来のレーダ装置の目標分離性能の説明図である。
【発明を実施するための形態】
【0017】
実施の形態1.
この発明の実施の形態1に係るレーダ装置について図1から図13までを参照しながら説明する。図1はこの発明の実施の形態1に係るレーダ装置の構成を示す処理ブロック図である。なお、各図中、同一符号は同一または相当部分を示す。
【0018】
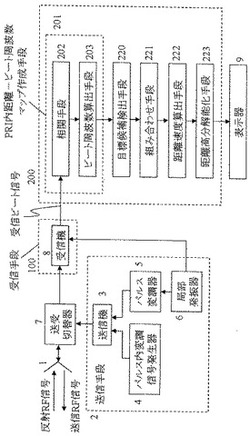
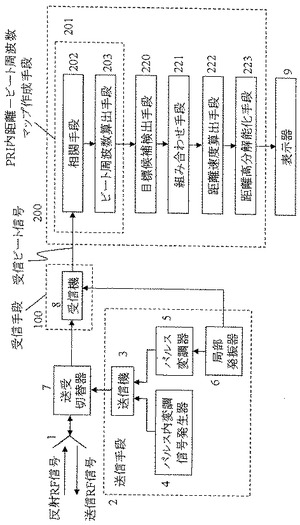
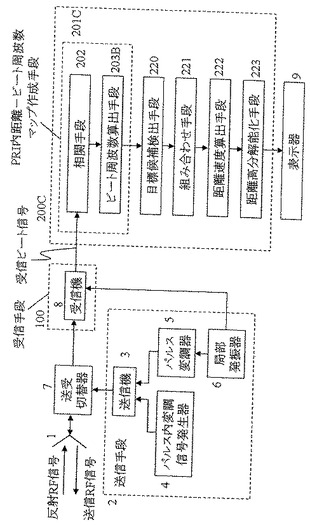
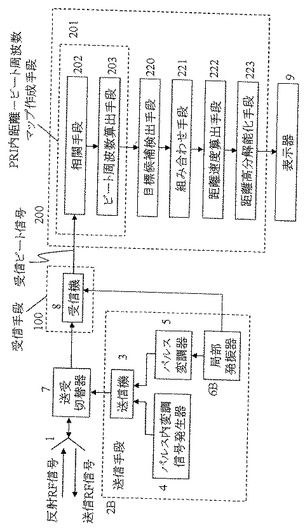
この発明の実施の形態1に係るレーダ装置は、図1に示すように、空中線1と、送信手段2と、送受切替器7と、受信手段100と、信号処理器200と、表示器9とから構成されている。
【0019】
送信手段2は、送信機3と、パルス内変調信号発生器4と、パルス変調器5と、局部発振器6とが設けられている。
【0020】
信号処理手段200は、CPU(Central Processing Unit)、RAM(Random Access Memory)、ROM(Read Only Memory)、インターフェース回路を有するコンピュータから構成され、ROMに記憶されるプログラムに従って、CPUで演算処理が行われる。信号処理手段200の処理結果は、RAMなどのメモリに記録される。
【0021】
信号処理手段200は、PRI内距離−ビート周波数マップ作成手段201と、目標候補検出手段220と、組み合わせ手段221と、距離速度算出手段222と、距離高分解能化手段223とが設けられている。
【0022】
PRI内距離−ビート周波数マップ作成手段201は、相関手段202と、ビート周波数算出手段203とが設けられている。
【0023】
つぎに、この実施の形態1に係るレーダ装置の動作について図面を参照しながら説明する。
【0024】
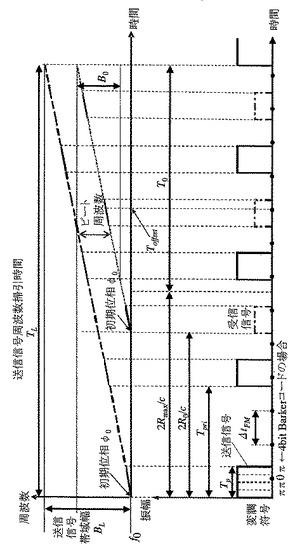
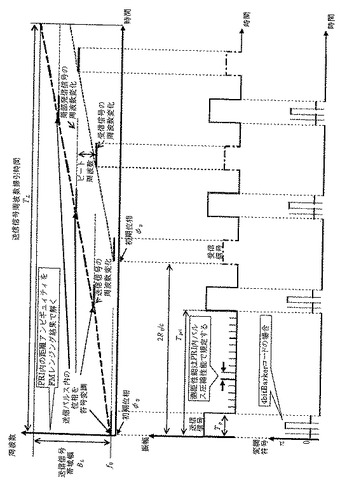
まず、図2を参照しながら受信ビート信号を生成するまでの動作について説明する。図2は周波数変調とパルス内符号変調した送信信号と受信信号の関係を説明するための図である。ただし、図2ではアップチャープの場合を示す。
【0025】
図2において、f0は送信開始周波数、Tpriはパルス繰り返し周期 (PRI)、TLは送信信号周波数掃引時間、BLは送信信号帯域幅、T0はビート信号観測時間、B0はビート信号観測時間T0の時間間隔での送信信号帯域幅、Tpは送信パルス幅、φ0は送信信号と局部発振信号(キャリア信号)の初期位相、R0は時刻t=0の目標との初期相対距離、Rmaxは最大探知距離、Toffsetは時刻2Rmax /c以上で初めての送信パルス送信開始時刻、cは光速を示す。
【0026】
また、時刻2Rmax /c以上で初めての送信パルス送信開始時刻Toffset、最大探知距離Rmax 、送信信号周波数掃引時間TL、TLの時間間隔での送信信号帯域幅BL、ビート信号観測時間T0、T0の時間間隔での送信信号帯域幅B0には次の式(1)、式(2)、式(3)で示す関係がある。
【0027】
【数1】

【0028】
図2では簡単のため、局部発振信号がアップチャープで、単一目標からの受信ビート信号のみを示すが、実施の形態1は、局部発振信号として周波数変調率の絶対値の等しいアップチャープとダウンチャープの信号を用い、目標数を2として説明する。
【0029】
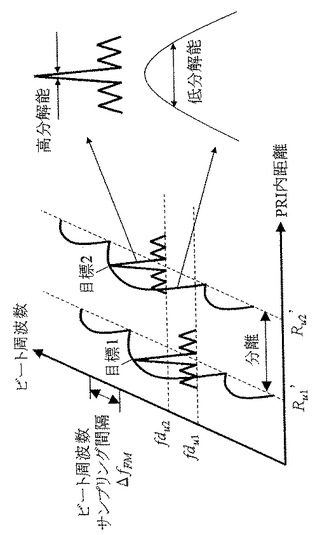
次に、図3を参照しながら、送信信号に関わるパラメータの設定方法について説明する。図3では、アップチャープの場合のPRI内距離−ビート周波数マップを示す。ここで、Ru1’は目標1のPRI内距離(周波数変調率がアップチャープ時)、Ru2’は目標2のPRI内距離(周波数変調率がアップチャープ時)、ΔfFMはビート周波数のサンプリング周波数間隔である。
【0030】
PRI内距離の距離アンビギュィティの解消と、アンビギュイティのない距離の分解能より相関処理後の距離分解能が高距離分解能になるような、式(4)と式(5)と式(6)を満たすビート周波数の周波数分解能ΔfFM’とビート周波数のサンプリング周波数間隔ΔfFM、相関処理後の距離分解能ΔRPC’、1PRIの折り返し距離Rpriを算出するパラメータが設定される。1PRIの折り返し距離Rpriを算出するパラメータとしては、ビート信号観測時間T0、ビート信号観測時間T0の時間間隔での送信信号帯域幅B0が設定される。
【0031】
【数2】
【0032】
また、ビート周波数の距離分解能ΔfFM’は式(7)、PRI内折返し距離Rpriは式(8)、サンプリング間隔ΔfFMは式(9)、相関処理後の距離分解能ΔRPC’は式(10)で算出される。ただし、1サンプル毎に符号変調した場合としている。ここで、HはPRI間FFT点数を表す。送信手段2は、以上のように設定されたパラメータに基づいて動作する。
【0033】
【数3】
【0034】
次に、図4から図7までを参照しながら局部発振信号の周波数変調率変化の設定方法について説明する。
【0035】
局部発振器6は、送信信号周波数掃引時間TL、送信信号帯域幅BLで周波数変調された次の式(11)で表される局部発振信号L0(t)を生成し、パルス変調器5と受信手段100に出力する。
【0036】
【数4】
【0037】
ただし、ALは局部発振信号の振幅、φ0は送信RG信号の初期位相とし、±の符号は、アップチャープの場合は+を、ダウンチャープの場合は−を用いる。
【0038】
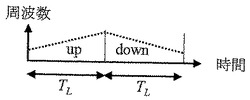
図4に局部発振信号の周波数時間変化を示す。局部発振器6は、図4に示すように、初めの送信信号周波数掃引時間TLではアップチャープの局部発振信号、次のTLでは周波数変調率の絶対値が等しいダウンチャープの局部発振信号を生成する。実施の形態1では、局部発振器6は、以上のように設定された局部発振信号の周波数変調率に基づいて動作する。
【0039】
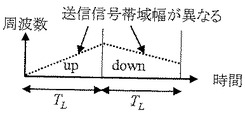
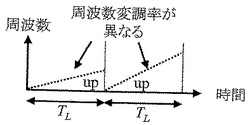
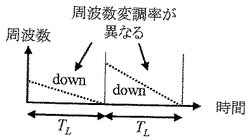
局部発振器6に設定される周波数変調率は、図5に示すように、アップチャープまたはダウンチャープの送信信号周波数掃引時間TLの時間間隔での送信信号帯域幅BLを、異なる送信信号帯域幅BL’に変更したアップチャープとダウンチャープの局部発振信号の組み合わせでも良い。また、図6に示すように、送信信号帯域幅BLのダウンチャープの局部発振信号を、異なる送信信号帯域幅BL’のアップチャープの局部発振信号に変更したアップチャープ同士の組み合わせでも良い。さらに、図7に示すように、送信信号帯域幅BLのアップチャープの局部発振信号を、異なる送信信号帯域幅BL’のダウンチャープの局部発振信号に変更したダウンチャープ同士の組み合わせでも良い。ただし、用いる送信信号帯域幅BL’は式(4)と式(5)と式(6)の条件を満たすものとする。
【0040】
パルス変調器5は、局部発振器6から入力された局部発振信号L0(t)に対しパルス変調を行い、次の式(12)で表されるパルス変調された局部発振信号L’0(t)として、送信機3に出力する。
【0041】
【数5】
【0042】
ここで、nLは送信信号周波数掃引時間TL内のパルス番号、NLは送信信号周波数掃引時間TL内のパルス数を表す。
【0043】
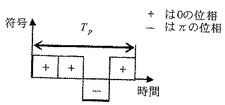
パルス内変調信号発生器4は、図8に示す4bit Barkerコードをパルス内変調信号φ(t)として生成し、送信機3に出力する。パルス内変調信号として他のbit Barkerコードを用いても良い。また、パルス内変調信号として他の符号変調や周波数変調を用いても良い。
【0044】
送信機3は、パルス変調器5から入力されたパルス変調された局部発振信号L’0(t)に対して、パルス内変調信号発生器4から入力されたパルス内変調信号φ(t)を用いてパルス内変調を行い、次の式(13)で表される送信RF信号Tx(t)を送受切替器7に出力する。
【0045】
【数6】
【0046】
ここで、ATは送信RF信号の振幅、rem(X, Y)は変数Xを変数Yで割った時の剰余を示す。
【0047】
送受切替器7は、送信機3から入力された送信RF信号を空中線1に出力する。そして、空中線1から送信RF信号が空中に放射される。
【0048】
空中に放射された送信RF信号は、目標で反射され、反射RF信号として空中線1に入射する。そこで、空中線1は、入射してきた反射RF信号を受信し、受信RF信号として送受切替器7に出力する。
【0049】
送受切替器7は、空中線1から入力された受信RF信号を受信手段100に出力する。式(13)で表される送信RF信号Tx(t)が、相対距離R(t)にある目標からの反射RF信号を受信した場合、受信RF信号Rxtgt (nL, t)は次の式(14)で表される。
【0050】
【数7】
【0051】
ここで、Atgt(ntgt)は受信RF信号の振幅、ntgtは目標番号を表し、目標1はntgt=1、目標2はntgt=2に対応する。また、時刻tでの目標相対距離R(t, ntgt)は次の式(15)で表される。
【0052】
【数8】
【0053】
ここで、R0(1)は目標1の距離、v(1)は目標1の速度、R0(2)は目標2の距離、v(2)は目標2の速度を示す。
【0054】
ビート信号観測時間T0内に観測される受信RF信号Rxtgt (n, t)は次の式(16)で表される。
【0055】
【数9】
【0056】
ここで、nはビート信号観測時間T0内のパルス番号、Nはビート信号観測時間T0内のパルス数を示す。
【0057】
受信手段100は受信機8により構成される。受信機8は、送受切替器7から入力された受信RF信号Rxtgt (n, t)に対し、局部発振器6から入力された局部発振信号L0(t)を用いてダウンコンバートした後、増幅、位相検波を行い、次の式(17)で表される受信ビート信号S (n, t)として信号処理手段200に出力する。
【0058】
【数10】
【0059】
さらに式(17)を展開すると、受信ビート信号S (n, t)は次の式(18)のように表される。
【0060】
【数11】
【0061】
以下、mを1PRI内のサンプリング番号、Mを1PRI内のサンプリング点数、Δtを1PRI内のサンプリング時間として、次の式(19)で表されるサンプリングされた受信ビート信号S(n, m)を用いて、説明を行う。ただし、T0内のサンプリング時間tsamp(n, m)は次の式(20)で表される。
【0062】
【数12】
【0063】
以降、図9の処理ブロック図に示される受信ビート信号に対する各手段の処理内容について説明する。
【0064】
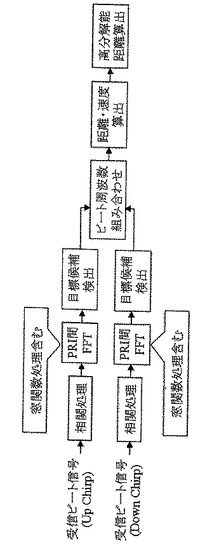
PRI内距離−ビート周波数マップ作成手段201は相関手段202とビート周波数算出手段203で構成され、受信ビート信号に対して相関処理とPRI間FFTを行い、目標との相対距離を算出するためのPRI内距離−ビート周波数マップを作成する。
【0065】
相関手段202は、式(18)で表される受信ビート信号S(n, m)と参照信号Ex(mτ)との相関処理、つまりパルス圧縮を行う。ここでは、周波数領域での相関処理について説明する。
【0066】
送信RF信号のパルス内変調成分と同じA/D変換後の参照信号Ex(mτ)は式(21)で表される。ここで、mτはサンプリング番号、Mτは1PRIのサンプリング点数(式(22))、floor(X)は変数Xを越えない最大の整数を表す。
【0067】
【数13】
【0068】
相関手段202は、受信ビート信号S(n, m)と参照信号Ex(mτ)を式(23)と式(24)によりそれぞれFFTした後、乗算する(式(25))。ここで、*は複素共役、lはPRI内サンプリング番号、L’は相関処理のFFT点数を表す。ただし、L’>Mの時にはS(n, m)に0を代入し、L’>Mτの時にはEx(mτ)に0を代入する。
【0069】
【数14】
【0070】
また、相関手段202は、相関処理後の信号を受信ビート信号のサンプリング間隔よりも高精度にサンプリングする場合、式(26)により0を設定する。ここで、Lは相関処理の高速フーリエ逆変換(IFFT:Inverse Fast Fourier Transform)点数であり、式(27)により表される。ただし、qは0以上の整数である。また、q=0の場合は、受信ビート信号のサンプリング間隔と同じサンプリング間隔になる。
【0071】
【数15】
【0072】
最後に、相関手段202は、乗算結果FV・Ex(n, kr)に対して、式(28)によりIFFTを行い、相関処理の結果、すなわちパルス圧縮後の信号RV・Ex(n, l)を出力する。また、パルス圧縮後の信号RV・Ex(n, l)のサンプリング番号lに対応するPRI内相対距離RPC(l)は式(29)により表される。
【0073】
【数16】
【0074】
ビート周波数算出手段203は、式(30)によりパルス圧縮後の信号RV・Ex(n, l)をPRI方向にH点でIFFTすることでPRI内距離−ビート周波数マップRFMRPC (kh , l)を出力する。ただし、H>Nの時にはRV・Ex(n, l)に0埋めを行う。ここで、khはPRI間FFT後のサンプリング番号を表す。また、PRI間FFT後のサンプリング番号に対応するビート周波数f(kh)は式(31)により表される。
【0075】
【数17】
【0076】
上記のように、PRI内距離−ビート周波数マップ作成手段201は、PRI内パルス圧縮とPRI間FFTを行うことにより、目標との相対距離を算出するための図3に示すPRI内距離−ビート周波数マップを目標候補検出手段220に出力する。
【0077】
次に、目標候補検出手段220は、信号の強度に基づき目標候補を検出するCFAR(Constant False Alarm Rate)処理を行う。
【0078】
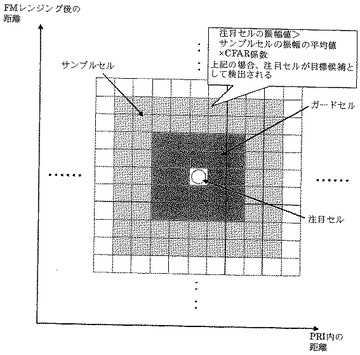
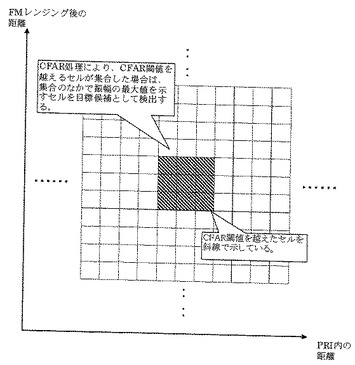
図10と図11を参照しながら、CFAR処理による目標候補検出の処理内容を説明する。図10は、CFAR処理に関わる注目セル、ガードセル、サンプルセルを説明するための図である。また、図11は、CFAR処理の結果、CFAR閾値CFAR_th(kh, l)を越えるセルが集合した場合の処理内容を説明するための図である。
【0079】
目標候補検出手段220は、PRI内距離−ビート周波数マップ作成手段201から得られるPRI内距離−ビート周波数マップRFMRPC(kh, l)に対し、式(32)によりCFAR処理を行い、目標候補を検出する。ここで、RFMRPC,CFAR(kh, l)はCFAR処理による目標候補検出結果を表し、目標候補は0が設定される。ただし、abs(X)は定数Xの絶対値を表す。
【0080】
【数18】
【0081】
また、CFAR閾値 CFAR_th (kh, l) は次の式(33)により算出する。ここで、CFAR_corはCFAR係数、Samp_cell (kh, l) はサンプルセル、ave (Z(p))は配列Z(p)の平均値を表す。ただし、図11のようにCFAR閾値 CFAR_th(kh, l) を越えるセルが集合した場合は、集合のなかで振幅の最大値を示すセルを目標候補として検出する。また、複数の集合がある場合も、振幅の最大値を示すセルを目標候補として検出する。
【0082】
【数19】
【0083】
ここで、本方式では、図3で示すように、相関手段202は高分解能なPRI内距離を算出する。よって、本方式では特許文献1で示されたレーダ装置とは異なり、目標候補検出手段220は、ビート周波数の差が周波数分解能以下でも、相関手段202によりPRI内距離方向の信号が分離され、CFAR処理により2つの目標を検出できる。
【0084】
以上の処理により得られた目標候補は、周波数変調がアップチャープ時の振幅値がピークとなるセルをピークu1、ピークu2、周波数変調がダウンチャープ時の振幅値がピークとなるセルをピークd1、ピークd2とすると、ピークu1は次の式(34)、ピークu2は次の式(35)、ピークd1は次の式(36)、ピークd2は次の式(37)で表される。
【0085】
【数20】
【0086】
ただし、ピークu1のセルと対応するビート周波数をfdu1、PRI内距離をRu1’、ピークu2のセルと対応するビート周波数をfdu2、PRI内距離をRu2’、ピークd1のセルと対応するビート周波数をfdd1、PRI内距離をRd1’、ピーク2のセルと対応するビート周波数をfdd2、PRI内距離をRd2’、目標1のPRI内距離のサンプリング番号をltgt1、目標2のPRI内距離のサンプリング番号をltgt2とした。また、Kr、Kvは次の式(38)、式(39)で表される。
【0087】
【数21】
【0088】
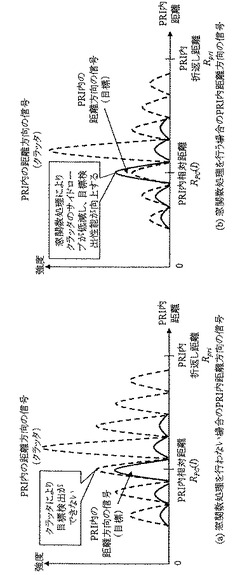
図12と図13を参照しながら、組み合わせ手段221の処理内容を説明する。図12は、PRI内距離判定方法を説明するための図であり、図13は、複数目標の場合のビート周波数組み合わせ方法を説明するための図である。
【0089】
組み合わせ手段221では、目標候補検出手段220から入力された目標候補に対し、PRI内相対距離RPC(l)を用いて組み合わせを求める。
【0090】
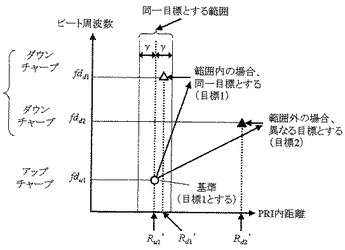
図12に同一目標の判定方法を示す。ここで、Ru1’ は目標1のPRI内距離(周波数変調率がアップチャープ時)、Rd1’は目標1のPRI内距離(周波数変調率がダウンチャープ時)、Rd2’は目標2のPRI内距離(周波数変調率がダウンチャープ時)である。
【0091】
組み合わせ手段221は、図12のRu1’とRd1’とのように、PRI内距離の差が閾値γ以内であった場合、同一目標であると判定する。また、組み合わせ手段221は、図12のRu1’とRd2’とのように、PRI内距離の差が閾値γ以上であった場合、異なる目標であると判定する。
【0092】
図13に複数目標の場合の組み合わせ方法を示す。組み合わせ手段221は、図12で示した判定方法を用いて、目標候補のビート周波数の中で、PRI内距離の差が閾値以内となるもの同士を組み合わせる。以降、目標1について説明を行うが、目標2についても同様の方法を用いることができる。
【0093】
距離速度算出手段222では、組み合わせ手段221から入力されたビート周波数の組み合わせを用いて、アンビギュイティのない距離および速度を算出する。速度算出式を式(40)、アンビギュイティのない距離算出式を式(41)に示す。
【0094】
【数22】
【0095】
以上のように、本方式では、予め速度が得られなくても、ビート周波数の組み合わせにより速度項を消去してアンビギュイティのない距離を算出することができるため、移動目標についてもアンビギュイティ無く距離を算出することができる。
【0096】
距離高分解能化手段223は距離高分解能化処理を行う。
【0097】
まず、距離高分解能化手段223は、パルス折り返し数を算出する。目標距離はパルス折り返し数とPRI内距離を用いて次の式(42)により表される。よって、パルス折り返し数は、距離速度算出手段222から入力されたアンビギュイティのない距離と、相関手段202から入力されたPRI間相対距離RFM(kh)を用いて、式(43)により表される。ここで、Nrtn(1)は目標1のパルス折り返し数である。また、式(42)のRd1’の代わりにRu1’を用いても良い。
【0098】
【数23】
【0099】
ただし、距離高分解能化手段223が算出する目標1のパルス折り返し数Nrtn (1)は、ビート周波数のサンプリング誤差を含む。
【0100】
そこで、距離高分解能化手段223は、式(44)によりサンプリング誤差を除いた目標1のパルス折り返し数Nrtn’ (1)を求める。ここで、round(X)は変数Xを四捨五入した整数である。
【0101】
【数24】
【0102】
さらに、距離高分解能化手段223は、誤差を除いた目標1のパルス折り返し数Nrtn’ (1)を用いて、式(45)から高分解能な目標相対距離R0’(1)を求める。ここでも、式(45)のRd1’の代わりにRu1’を用いても良い。
【0103】
【数25】
【0104】
表示器9は、PRI内距離−ビート周波数マップと、目標候補がある場合、目標情報として目標相対距離を画面上に表示する。
【0105】
実施の形態1では、目標数が2の場合について説明したが、目標数が1、または3以上の場合も同様の効果が得られる。
【0106】
以上のように、実施の形態1によれば、ビート周波数を得るために、アップチャープの周波数変調を行い、かつ、PRI内距離を得るために、パルス内変調を施した送信RF信号を、送受信し、受信ビート信号に対し、PRI内はパルス圧縮、PRI間はFFTを行い、PRI内距離−ビート周波数マップを作成し、PRI内距離−ビート周波数マップに対し、CFAR処理により目標候補を算出し、同様の処理をダウンチャープの周波数変調を施した送信信号に対しても行い、PRI内距離を用いた組み合わせ処理によりアップチャープとダウンチャープのビート周波数の組み合わせを決定し、組み合わせ処理により得られたビート周波数の組み合わせから、目標のアンビギュイティのない距離および速度を算出し、目標のPRI内距離アンビギュィティをアンビギュイティのない距離を用いて解き、目標相対距離を算出する。
【0107】
この結果、複数目標が高分解能なPRI内距離情報を用いることにより、多目標対処可能で、かつ、距離アンビギュィティの無い高分解能な距離を算出可能なレーダ装置を得ることができる。また、先の特許文献1では、振幅値や測角値の差が小さい複数目標は、ビート周波数の組み合わせを区別することができなかったが、実施の形態1では、振幅値と測角値の差が小さい場合にも、高分解能なPRI内距離を用いることで、複数目標の距離を得ることが可能になる。さらに、先の特許文献1では、信号分離性能が、分解能の低いビート周波数の分解能に依存しており、ビート周波数の差が周波数分解能よりも小さい場合、信号の分離ができなかったが、実施の形態1では、高分解能なPRI内距離の分解能で信号を分離することができるため、目標分離性能が高い。
【0108】
実施の形態2.
この発明の実施の形態2に係るレーダ装置について図14から図19までを参照しながら説明する。図14は、この発明の実施の形態2に係るレーダ装置の構成を示す処理ブロック図である。
【0109】
図14において、この発明の実施の形態2に係るレーダ装置は、空中線1と、送信手段2と、送受切替器7と、受信手段100と、信号処理器200Bと、表示器9とが設けられている。
【0110】
この実施の形態2に係るレーダ装置は、実施の形態1に係るレーダ装置と信号処理器200Bが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。
【0111】
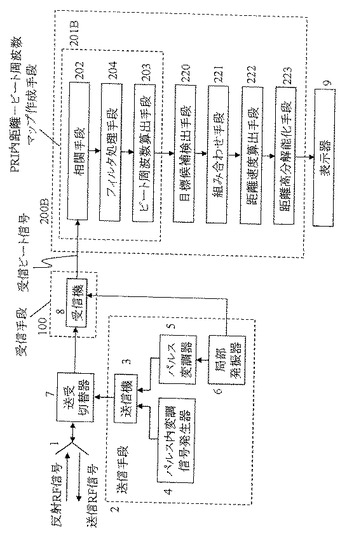
すなわち、信号処理器200Bは、図14に示すように、実施の形態1に係る信号処理器200のPRI内距離−ビート周波数マップ作成手段201に代えて、フィルタ処理手段204を加えたPRI内距離−ビート周波数マップ作成手段201Bを有することが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。
【0112】
信号処理器200Bは、図15に示す処理を受信ビート信号に対して行う。
【0113】
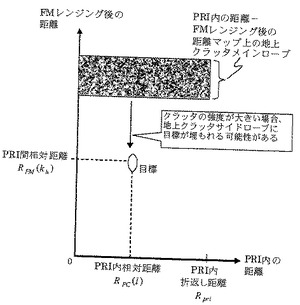
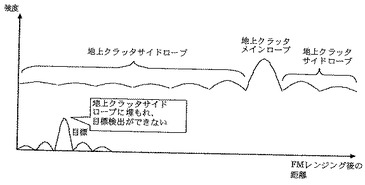
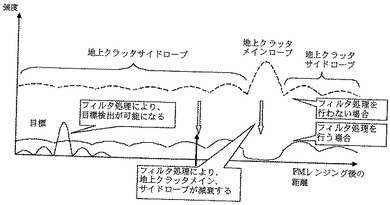
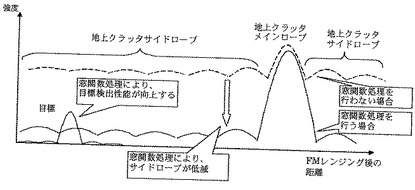
実施の形態2では、クラッタとしてさらに地上クラッタサイドローブを想定し、地上クラッタサイドローブの低減を目的として、フィルタ処理を行う。強度の大きい地上クラッタがある場合、図16のように目標が地上クラッタメインローブと異なる距離においても、図17のように目標が地上クラッタサイドローブに埋もれる可能性がある。
【0114】
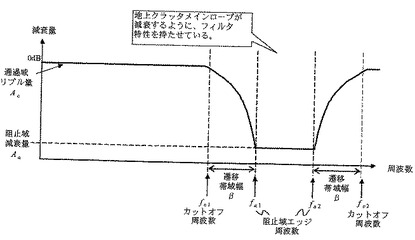
フィルタ処理手段204は、地上クラッタメインローブを減衰させ、それに伴い地上クラッタサイドローブを減衰させるフィルタのパラメータを次の式(46)、式(47)、式(48)、式(49)により算出する。ここで、fc1、fc2は阻止域エッジ周波数、fa1、fa2はカットオフ周波数、αは予め設定した阻止域帯域幅に余裕を持たせる帯域幅、βは予め設定した遷移帯域幅、Acは予め設定した通過域リプル量、Aaは予め設定した阻止域減衰量である。また、min(X, Y)は変数XとYの最小値、max(X, Y)は変数XとYの最大値を表す。
【0115】
【数26】
【0116】
フィルタ処理手段204は、式(46)〜式(49)により算出されたパラメータと予め設定したフィルタ特性を持つNflt次のフィルタflt(p)を作成する。
実施の形態2では、フィルタとしてFIR(Finite Impulse Response)フィルタを用いて説明するが、IIR(Infinite Impulse Response)フィルタを用いた場合も同様の効果を得ることが可能である。
【0117】
フィルタ処理手段204は、図18に示すように、地上クラッタメインローブが減衰するようなフィルタ特性を持たせているため、フィルタ処理後は地上クラッタメインローブと地上クラッタサイドローブを減衰することが可能になる。
【0118】
フィルタ処理手段204は、地上クラッタサイドローブの低減を目的として、パルス圧縮後の信号RV・Ex(n, l)に対して、次の式(50)によりPRI方向にフィルタ処理を行い、フィルタ処理後の信号Rflt(n, l)を出力する。
【0119】
【数27】
【0120】
ビート周波数算出手段203は、入力されたフィルタ処理後の信号Rflt(n, l)に対し、PRI方向にH点でIFFTすることでPRI内距離−ビート周波数マップRFMRPC (kh , l)を出力する。
【0121】
図19に示すように、フィルタ処理を行うことにより、PRI内距離−ビート周波数マップのビート周波数方向の地上クラッタメインローブとサイドローブが低減し、目標検出性能が向上する。
【0122】
以上のように、実施の形態2によれば、目標が地上クラッタサイドローブに埋もれないようにフィルタ処理を加えて行うフィルタ処理手段204を備えているので、クラッタ分離性能の向上、つまり目標検出性能の向上を図ったレーダ装置を得ることできる。
【0123】
実施の形態3.
この発明の実施の形態3に係るレーダ装置について図20から図23までを参照しながら説明する。図20は、この発明の実施の形態3に係るレーダ装置の構成を示す処理ブロック図である。
【0124】
図20において、この発明の実施の形態3に係るレーダ装置は、空中線1と、送信手段2と、送受切替器7と、受信手段100と、信号処理器200Cと、表示器9とをが設けられている。
【0125】
この実施の形態3に係るレーダ装置は、上記の実施の形態1に係るレーダ装置と信号処理器200Cが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。
【0126】
すなわち、信号処理器200Cは、図20に示すように、実施の形態1に係る信号処理器200のPRI内距離−ビート周波数マップ作成手段201のビート周波数算出手段203に代えて、距離−ビート周波数マップ作成手段201Cのビート周波数算出手段203Bを有することが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。
【0127】
信号処理器200Cは、図21に示す処理を受信ビート信号に対して行う。
【0128】
ビート周波数算出手段203Bは、PRI間FFTのための窓関数windFM(n)を次の式(51)により算出する。ここでは、PRI間FFTのための窓関数をハミング窓として説明をするが、他の窓関数を用いた場合も同様の効果を得ることが可能である。また、実施の形態3ではPRI内に符号変調を行っているが、PRI内に符号変調以外の変調を行った場合、図22に示すように、PRI内に窓関数を用いることにより同様の効果を得ることが可能である。
【0129】
【数28】
【0130】
ビート周波数算出手段203Bは、次の式(52)により窓関数処理を行ったPRI間FFTのための窓関数windFM(n)を乗算し、PRI方向に窓関数処理を行ったパルス圧縮後の信号R”V・Ex(n, l)を算出する。
【0131】
【数29】
【0132】
ビート周波数算出手段203Bは、パルス圧縮後の信号RV・Ex(n, l)に代えてPRI方向に窓関数処理を行ったパルス圧縮後の信号R”V・Ex(n, l)を式(30)に従いPRI方向にH点でIFFTすることでPRI内距離−ビート周波数マップRFMRPC (kh , l)を出力する。
【0133】
図23に示すように、PRI間FFTの際に窓関数処理を加えて行うことにより、地上クラッタサイドローブが低減し、目標検出性能が向上する。
【0134】
以上のように、実施の形態3によれば、目標が地上クラッタサイドローブに埋もれないように窓関数処理を加えて行うビート周波数算出手段203Bを備えているので、クラッタ分離性能の向上、つまり目標検出性能の向上を図ったレーダ装置を得ることできる。また、ビート周波数算出手段203Bに代えてビート周波数算出手段203を用いた場合においてもそれぞれに同様の効果を得ることができる。
【0135】
実施の形態4.
この発明の実施の形態4に係るレーダ装置について図24から図25までを参照しながら説明する。図24は、この発明の実施の形態4に係るレーダ装置の構成を示す処理ブロック図である。
【0136】
図24において、この発明の実施の形態4に係るレーダ装置は、空中線1と、送信手段2Bと、送受切替器7と、受信手段100と、信号処理器200と、表示器9とが設けられている。
【0137】
この発明の実施の形態4に係るレーダ装置は、実施の形態1に係るレーダ装置と送信手段2Bが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。
【0138】
すなわち、送信手段2Bは、図24に示すように、実施の形態1に係る送信手段2の局部発振器6に代えて、局部発振器6Bを有し、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。
【0139】
送信手段2Bは、式(4)〜式(6) を満たすビート周波数分解能ΔfFM’とサンプリング間隔ΔfFM、相関処理後の距離分解能ΔR’PC、1PRIの折り返し距離Rpriのパラメータが設定される。
【0140】
以降、図25を参照しながら、局部発振器6Bの動作について説明する。この局部発振器6Bは、送信信号周波数掃引時間TL、送信信号帯域幅BLでPRI間隔に段階的に周波数変調された次の式(53)で表される局部発振信号L0(t)を生成し、パルス変調器5と受信手段100に出力する。ここで、PRI間隔の周波数変調幅Δfは式(54)により算出する。
【0141】
【数30】
【0142】
局部発振器6Bでは段階的に周波数変調を行っているが受信ビート信号に対する処理は同じ処理を行うため、信号処理器200は、図9に示す処理を受信ビート信号に対して行う。ただし、段階的に周波数変調しているためビート周波数のサンプリング間隔はビート周波数分解能ΔfFM’と同じになる。パルス内を周波数変調する必要がなくなり、ハードウェアの規模を小さくすることが可能になる。
【0143】
以上のように、この実施の形態4によれば、パルス内を周波数変調する必要がなくなり、ハードウェアの規模を小さくすることが可能になり、かつ、目標相対距離を精度良く算出することが可能なレーダ装置を得ることができる。
【産業上の利用可能性】
【0144】
この発明のレーダ装置は、複数目標までの距離を測定することができ、例えば複数の船舶や、複数の航空機等の目標探知に利用される可能性がある。
【符号の説明】
【0145】
1 空中線、2、2B 送信手段、3 送信機、4 パルス内変調信号発生器、5 パルス変調器、6、6B 局部発振器、7 送受切替器、8 受信機、9 表示器、100 受信手段、200、200B、200C 信号処理手段、201、201B、201C PRI内距離−ビート周波数マップ作成手段、202 相関手段、203、203B ビート周波数算出手段、204 フィルタ処理手段、220 目標候補検出手段、221 組み合わせ手段、222 距離速度算出手段、223 距離高分解能化手段。
【技術分野】
【0001】
この発明は、異なる周波数変調率で周波数変調された受信ビート信号のビート周波数の組み合わせを決定し、目標物までの距離を算出するレーダ装置に関するものである。
【背景技術】
【0002】
ここでは、この発明に係わるビート周波数の組み合わせを、振幅値または測角値を用いて決定し、複数目標までの距離を測定する特開08-262131号公報(特許文献1)で示されたレーダ装置について説明する。
【0003】
特許文献1で示されたレーダ装置は、アップチャープの周波数変調を施した信号を送信し、目標物からその反射波を受信した後、周波数変調率の絶対値が等しいダウンチャープの周波数変調を施した信号を送信し、目標物からその反射波を受信し、それぞれの受信信号を高速フーリエ変換 (FFT: Fast Fourier Transform) することによりビート周波数を求める。複数目標の場合、アップチャープとダウンチャープの周波数変調を施した信号を送受信により、それぞれ複数のビート周波数のピークが得られるため、それらビート周波数の組み合わせを求める必要がある。
【0004】
ここで、図26と図27とを参照しながら、特許文献1で示されたレーダ装置における受信ビート信号の振幅値または測角値を用いて受信ビート信号のビート周波数の組み合わせを決定する方法について説明する。図26では、受信ビート信号の振幅値を用いて受信ビート信号のビート周波数の組み合わせを決定する方法を示し、図27では測角値を用いて受信ビート信号のビート周波数の組み合わせを決定する方法を示す。
【0005】
図26の横軸は受信ビート信号のビート周波数、縦軸は振幅である。図27の横軸は受信ビート信号のビート周波数、縦軸は測角値である。図26において、fdu1は目標1のアップチャープ時のビート周波数、fdu2は目標2のアップチャープ時のビート周波数、fdd1は目標1のダウンチャープ時のビート周波数、fdd2は目標2のダウンチャープ時のビート周波数、Au1は目標1のアップチャープ時のビート周波数fdu1の振幅、Au2は目標2のアップチャープ時のビート周波数fdu2の振幅、Ad1は目標1のダウンチャープ時のビート周波数fdd1の振幅、Ad2は目標2のダウンチャープ時のビート周波数fdd2の振幅である。
【0006】
また、図27において、fdu1は目標1のアップチャープ時のビート周波数、fdu2は目標2のアップチャープ時のビート周波数、fdd1は目標1のダウンチャープ時のビート周波数、fdd2は目標2のダウンチャープ時のビート周波数、θu1は目標1のアップチャープ時のビート周波数fdu1の測角値、θu2は目標2のアップチャープ時のビート周波数fdu2の測角値、θd1は目標1のダウンチャープ時のビート周波数fdd1の測角値、θd2は目標2のダウンチャープ時のビート周波数fdd2の測角値である。
【0007】
図26では、目標1のアップチャープ時のビート周波数fdu1の振幅Au1と目標1のダウンチャープ時のビート周波数fdd1の振幅Ad1および目標2のアップチャープ時のビート周波数fdu2の振幅Au2と目標2のダウンチャープ時のビート周波数fdd2の振幅Ad2との差が閾値以内となっており、それ以外、例えば、目標1のアップチャープ時のビート周波数fdu1の振幅Au1と目標2のダウンチャープ時のビート周波数fdd2の振幅Ad2との差や、目標1のダウンチャープ時のビート周波数fdd1の振幅Ad1と目標2のアップチャープ時のビート周波数fdu2と振幅Au2との差は閾値以上であることから、目標1のアップチャープ時のビート周波数fdu1と目標1のダウンチャープ時のビート周波数fdd1および目標2のアップチャープ時のビート周波数fdu2と目標2のダウンチャープ時のビート周波数fdd2について組み合わせを行う。
【0008】
図27では、図26と同様、目標1のアップチャープ時のビート周波数fdu1の測角値θu1と目標1のダウンチャープ時のビート周波数fdd1の測角値θd1および目標2のアップチャープ時のビート周波数fdu2の測角値θu2と目標2のダウンチャープ時のビート周波数fdd2の測角値θd2との差が閾値以内となっており、それ以外、例えば、目標1のアップチャープ時のビート周波数fdu1の測角値θu1と目標2のダウンチャープ時のビート周波数fdd2の測角値θd2との差や、目標1のダウンチャープ時のビート周波数fdd1の測角値θd1と目標2のアップチャープ時のビート周波数fdu2との測角値θu2との差は閾値以上であることから、目標1のアップチャープ時のビート周波数fdu1と目標1のダウンチャープ時のビート周波数fdd1および目標2のアップチャープ時のビート周波数fdu2と目標2のダウンチャープ時のビート周波数fdd2について組み合わせを行う。
【0009】
このレーダ装置では、以上の方法で、ビート信号の振幅値または測角値の差が閾値以内となる信号のビート周波数を組み合わせ、ビート周波数の速度項を消去することにより、測距を行う。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開平08-262131号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
しかし、図28、図29に示すように、異なる目標の振幅値および測角値が閾値以内となった場合、目標を正しく組み合わせることができないという問題がある。
【0012】
また、複数目標のビート周波数差がビート周波数の分解能以下となる場合、このレーダ装置では、図30に示すように信号を分離できないという問題がある。
【0013】
この発明の目的は、異なる目標の振幅値や測角値の差が閾値以内となる場合でも、ビート周波数の組み合わせを決定し、高分解能に目標までの距離を算出でき、かつ、複数目標のビート周波数差がビート周波数の分解能以下となる場合でも、信号を分離し、目標までのそれぞれの距離を算出可能なレーダ装置を提供することである。
【課題を解決するための手段】
【0014】
この発明に係るレーダ装置は、
PRI (Pulse Repetition Interval) 内距離の距離アンビギュィティを解消できるアンビギュイティのない距離の分解能と、ビート周波数分解能よりPRI内距離分解能が高精度になるようなパラメータに基づき送信信号の異なる周波数変調率を複数選択し、得られた周波数変調率で複数のPRIに渡ってチャープ上に周波数変調されたキャリア信号を放射する送信手段と、
目標で反射して戻った前記送信手段から得られる送信信号を受信信号として受信し、この受信信号に対して、前記送信手段から得られる前記キャリア信号を用いてダウンコンバートし受信ビート信号に変換する受信手段と、
前記受信手段から得られる受信ビート信号に対しPRI間FFT (Fast Fourier Transform) を行い、目標との相対距離を算出するためのPRI内距離−ビート周波数マップを作成するPRI内距離−ビート周波数マップ作成手段と、
前記PRI内距離−ビート周波数マップ作成手段から得られるPRI内距離−ビート周波数マップに対し、信号の強度に基づき目標候補を検出する目標候補検出手段と、
前記目標候補検出手段から得られる目標候補に対し、PRI内距離を用いて目標候補同士を組み合わせる組み合わせ手段と、
前記組み合わせ手段により得られる組み合わせを用いて、目標候補のビート周波数を組み合わせ、アンビギュイティのない距離および速度を算出する距離速度算出手段と、
前記距離速度算出手段により得られるアンビギュイティのない距離を用いて、PRI内距離の距離アンビギュィティを解消し目標との相対距離を算出する距離高分解能化手段と
を備える。
【発明の効果】
【0015】
この発明に係るレーダ装置によれば、
複数目標が高分解能できるPRI内距離情報を用いることにより、多目標に対処可能で、かつ、距離アンビギュィティの無い高分解能な距離を算出可能なレーダ装置を得ることができる。また、振幅値と測角値の差が小さい場合にも、高分解能なPRI内距離を用いることで、複数目標の距離を得ることが可能になる。さらに、従来のレーダ装置では、信号分離性能が、分解能の低いビート周波数の分解能に依存しており、ビート周波数の差が周波数分解能よりも小さい場合、信号の分離ができなかったが、この発明に係るレーダ装置では、高分解能なPRI内距離の分解能で信号を分離することができるため、目標分離性能が高い効果を有する。
【図面の簡単な説明】
【0016】
【図1】この発明の実施の形態1に係るレーダ装置の構成図である。
【図2】アップチャープの場合における周波数変調とパルス内符号変調した送信信号と受信信号の関係の説明図である。
【図3】アップチャープの場合におけるPRI (Pulse Repetition Interval)内距離−ビート周波数マップの説明図である。
【図4】実施の形態1における送信信号帯域幅が等しいアップチャープとダウンチャープの場合の局部発振信号(キャリア信号)の周波数時間変化の説明図である。
【図5】局部発振信号の周波数時間変化(送信信号帯域幅が異なるアップチャープとダウンチャープの場合)の説明図である。
【図6】局部発振信号の周波数時間変化(送信信号帯域幅が異なるアップチャープ同士の場合)の説明図である。
【図7】局部発振信号の周波数時間変化(送信信号帯域幅が異なるダウンチャープ同士の場合)の説明図である。
【図8】パルス内変調信号発生器が生成する4bit Barkerコードの説明図である。
【図9】信号処理器の受信ビート信号に対する処理ブロック図である。
【図10】CFAR処理に関わる注目セル、ガードセル、サンプルセルの説明図である。
【図11】CFAR処理の結果によるCFAR閾値 CFAR_th (kh,l) を越えるセルが集合した場合の処理内容を説明する図である。
【図12】組み合わせ手段によるPRI内距離判定方法の説明図である。
【図13】組み合わせ手段による複数目標の場合のビート周波数組み合わせ方法の説明図である。
【図14】この発明の実施の形態2に係るレーダ装置の構成図である。
【図15】実施の形態2における信号処理器の受信ビート信号に対する処理ブロック図である。
【図16】地上クラッタサイドローブの影響を示す説明図である。
【図17】目標が地上クラッタサイドローブに埋もれる場合を示す図である。
【図18】フィルタ処理手段のフィルタ特性を示す説明図である。
【図19】フィルタ処理手段によるフィルタ処理の効果を示す説明図である。
【図20】この発明の実施の形態3に係るレーダ装置の構成図である。
【図21】実施の形態3における信号処理器の受信ビート信号に対する処理ブロック図である。
【図22】相関処理の際に窓関数処理を行う効果を示す説明図である。
【図23】PRI間FFTの際に窓関数処理を行う効果を示す説明図である。
【図24】この発明の実施の形態4に係るレーダ装置の構成図である。
【図25】段階的な周波数変調とパルス内符号変調した送信信号と受信信号の関係の説明図である。
【図26】特許文献1で示された従来のレーダ装置の振幅値を用いたビート周波数組み合わせ方法の説明図である。
【図27】特許文献1で示された従来のレーダ装置の測角値を用いたビート周波数組み合わせ方法の説明図である。
【図28】特許文献1で示された従来のレーダ装置の振幅値で組み合わせを解くことができない場合の説明図である。
【図29】特許文献1で示された従来のレーダ装置の測角値で組み合わせを解くことができない場合の説明図である。
【図30】特許文献1で示された変調周波数がアップチャープ時における従来のレーダ装置の目標分離性能の説明図である。
【発明を実施するための形態】
【0017】
実施の形態1.
この発明の実施の形態1に係るレーダ装置について図1から図13までを参照しながら説明する。図1はこの発明の実施の形態1に係るレーダ装置の構成を示す処理ブロック図である。なお、各図中、同一符号は同一または相当部分を示す。
【0018】
この発明の実施の形態1に係るレーダ装置は、図1に示すように、空中線1と、送信手段2と、送受切替器7と、受信手段100と、信号処理器200と、表示器9とから構成されている。
【0019】
送信手段2は、送信機3と、パルス内変調信号発生器4と、パルス変調器5と、局部発振器6とが設けられている。
【0020】
信号処理手段200は、CPU(Central Processing Unit)、RAM(Random Access Memory)、ROM(Read Only Memory)、インターフェース回路を有するコンピュータから構成され、ROMに記憶されるプログラムに従って、CPUで演算処理が行われる。信号処理手段200の処理結果は、RAMなどのメモリに記録される。
【0021】
信号処理手段200は、PRI内距離−ビート周波数マップ作成手段201と、目標候補検出手段220と、組み合わせ手段221と、距離速度算出手段222と、距離高分解能化手段223とが設けられている。
【0022】
PRI内距離−ビート周波数マップ作成手段201は、相関手段202と、ビート周波数算出手段203とが設けられている。
【0023】
つぎに、この実施の形態1に係るレーダ装置の動作について図面を参照しながら説明する。
【0024】
まず、図2を参照しながら受信ビート信号を生成するまでの動作について説明する。図2は周波数変調とパルス内符号変調した送信信号と受信信号の関係を説明するための図である。ただし、図2ではアップチャープの場合を示す。
【0025】
図2において、f0は送信開始周波数、Tpriはパルス繰り返し周期 (PRI)、TLは送信信号周波数掃引時間、BLは送信信号帯域幅、T0はビート信号観測時間、B0はビート信号観測時間T0の時間間隔での送信信号帯域幅、Tpは送信パルス幅、φ0は送信信号と局部発振信号(キャリア信号)の初期位相、R0は時刻t=0の目標との初期相対距離、Rmaxは最大探知距離、Toffsetは時刻2Rmax /c以上で初めての送信パルス送信開始時刻、cは光速を示す。
【0026】
また、時刻2Rmax /c以上で初めての送信パルス送信開始時刻Toffset、最大探知距離Rmax 、送信信号周波数掃引時間TL、TLの時間間隔での送信信号帯域幅BL、ビート信号観測時間T0、T0の時間間隔での送信信号帯域幅B0には次の式(1)、式(2)、式(3)で示す関係がある。
【0027】
【数1】
【0028】
図2では簡単のため、局部発振信号がアップチャープで、単一目標からの受信ビート信号のみを示すが、実施の形態1は、局部発振信号として周波数変調率の絶対値の等しいアップチャープとダウンチャープの信号を用い、目標数を2として説明する。
【0029】
次に、図3を参照しながら、送信信号に関わるパラメータの設定方法について説明する。図3では、アップチャープの場合のPRI内距離−ビート周波数マップを示す。ここで、Ru1’は目標1のPRI内距離(周波数変調率がアップチャープ時)、Ru2’は目標2のPRI内距離(周波数変調率がアップチャープ時)、ΔfFMはビート周波数のサンプリング周波数間隔である。
【0030】
PRI内距離の距離アンビギュィティの解消と、アンビギュイティのない距離の分解能より相関処理後の距離分解能が高距離分解能になるような、式(4)と式(5)と式(6)を満たすビート周波数の周波数分解能ΔfFM’とビート周波数のサンプリング周波数間隔ΔfFM、相関処理後の距離分解能ΔRPC’、1PRIの折り返し距離Rpriを算出するパラメータが設定される。1PRIの折り返し距離Rpriを算出するパラメータとしては、ビート信号観測時間T0、ビート信号観測時間T0の時間間隔での送信信号帯域幅B0が設定される。
【0031】
【数2】
【0032】
また、ビート周波数の距離分解能ΔfFM’は式(7)、PRI内折返し距離Rpriは式(8)、サンプリング間隔ΔfFMは式(9)、相関処理後の距離分解能ΔRPC’は式(10)で算出される。ただし、1サンプル毎に符号変調した場合としている。ここで、HはPRI間FFT点数を表す。送信手段2は、以上のように設定されたパラメータに基づいて動作する。
【0033】
【数3】
【0034】
次に、図4から図7までを参照しながら局部発振信号の周波数変調率変化の設定方法について説明する。
【0035】
局部発振器6は、送信信号周波数掃引時間TL、送信信号帯域幅BLで周波数変調された次の式(11)で表される局部発振信号L0(t)を生成し、パルス変調器5と受信手段100に出力する。
【0036】
【数4】
【0037】
ただし、ALは局部発振信号の振幅、φ0は送信RG信号の初期位相とし、±の符号は、アップチャープの場合は+を、ダウンチャープの場合は−を用いる。
【0038】
図4に局部発振信号の周波数時間変化を示す。局部発振器6は、図4に示すように、初めの送信信号周波数掃引時間TLではアップチャープの局部発振信号、次のTLでは周波数変調率の絶対値が等しいダウンチャープの局部発振信号を生成する。実施の形態1では、局部発振器6は、以上のように設定された局部発振信号の周波数変調率に基づいて動作する。
【0039】
局部発振器6に設定される周波数変調率は、図5に示すように、アップチャープまたはダウンチャープの送信信号周波数掃引時間TLの時間間隔での送信信号帯域幅BLを、異なる送信信号帯域幅BL’に変更したアップチャープとダウンチャープの局部発振信号の組み合わせでも良い。また、図6に示すように、送信信号帯域幅BLのダウンチャープの局部発振信号を、異なる送信信号帯域幅BL’のアップチャープの局部発振信号に変更したアップチャープ同士の組み合わせでも良い。さらに、図7に示すように、送信信号帯域幅BLのアップチャープの局部発振信号を、異なる送信信号帯域幅BL’のダウンチャープの局部発振信号に変更したダウンチャープ同士の組み合わせでも良い。ただし、用いる送信信号帯域幅BL’は式(4)と式(5)と式(6)の条件を満たすものとする。
【0040】
パルス変調器5は、局部発振器6から入力された局部発振信号L0(t)に対しパルス変調を行い、次の式(12)で表されるパルス変調された局部発振信号L’0(t)として、送信機3に出力する。
【0041】
【数5】
【0042】
ここで、nLは送信信号周波数掃引時間TL内のパルス番号、NLは送信信号周波数掃引時間TL内のパルス数を表す。
【0043】
パルス内変調信号発生器4は、図8に示す4bit Barkerコードをパルス内変調信号φ(t)として生成し、送信機3に出力する。パルス内変調信号として他のbit Barkerコードを用いても良い。また、パルス内変調信号として他の符号変調や周波数変調を用いても良い。
【0044】
送信機3は、パルス変調器5から入力されたパルス変調された局部発振信号L’0(t)に対して、パルス内変調信号発生器4から入力されたパルス内変調信号φ(t)を用いてパルス内変調を行い、次の式(13)で表される送信RF信号Tx(t)を送受切替器7に出力する。
【0045】
【数6】
【0046】
ここで、ATは送信RF信号の振幅、rem(X, Y)は変数Xを変数Yで割った時の剰余を示す。
【0047】
送受切替器7は、送信機3から入力された送信RF信号を空中線1に出力する。そして、空中線1から送信RF信号が空中に放射される。
【0048】
空中に放射された送信RF信号は、目標で反射され、反射RF信号として空中線1に入射する。そこで、空中線1は、入射してきた反射RF信号を受信し、受信RF信号として送受切替器7に出力する。
【0049】
送受切替器7は、空中線1から入力された受信RF信号を受信手段100に出力する。式(13)で表される送信RF信号Tx(t)が、相対距離R(t)にある目標からの反射RF信号を受信した場合、受信RF信号Rxtgt (nL, t)は次の式(14)で表される。
【0050】
【数7】
【0051】
ここで、Atgt(ntgt)は受信RF信号の振幅、ntgtは目標番号を表し、目標1はntgt=1、目標2はntgt=2に対応する。また、時刻tでの目標相対距離R(t, ntgt)は次の式(15)で表される。
【0052】
【数8】
【0053】
ここで、R0(1)は目標1の距離、v(1)は目標1の速度、R0(2)は目標2の距離、v(2)は目標2の速度を示す。
【0054】
ビート信号観測時間T0内に観測される受信RF信号Rxtgt (n, t)は次の式(16)で表される。
【0055】
【数9】
【0056】
ここで、nはビート信号観測時間T0内のパルス番号、Nはビート信号観測時間T0内のパルス数を示す。
【0057】
受信手段100は受信機8により構成される。受信機8は、送受切替器7から入力された受信RF信号Rxtgt (n, t)に対し、局部発振器6から入力された局部発振信号L0(t)を用いてダウンコンバートした後、増幅、位相検波を行い、次の式(17)で表される受信ビート信号S (n, t)として信号処理手段200に出力する。
【0058】
【数10】
【0059】
さらに式(17)を展開すると、受信ビート信号S (n, t)は次の式(18)のように表される。
【0060】
【数11】
【0061】
以下、mを1PRI内のサンプリング番号、Mを1PRI内のサンプリング点数、Δtを1PRI内のサンプリング時間として、次の式(19)で表されるサンプリングされた受信ビート信号S(n, m)を用いて、説明を行う。ただし、T0内のサンプリング時間tsamp(n, m)は次の式(20)で表される。
【0062】
【数12】
【0063】
以降、図9の処理ブロック図に示される受信ビート信号に対する各手段の処理内容について説明する。
【0064】
PRI内距離−ビート周波数マップ作成手段201は相関手段202とビート周波数算出手段203で構成され、受信ビート信号に対して相関処理とPRI間FFTを行い、目標との相対距離を算出するためのPRI内距離−ビート周波数マップを作成する。
【0065】
相関手段202は、式(18)で表される受信ビート信号S(n, m)と参照信号Ex(mτ)との相関処理、つまりパルス圧縮を行う。ここでは、周波数領域での相関処理について説明する。
【0066】
送信RF信号のパルス内変調成分と同じA/D変換後の参照信号Ex(mτ)は式(21)で表される。ここで、mτはサンプリング番号、Mτは1PRIのサンプリング点数(式(22))、floor(X)は変数Xを越えない最大の整数を表す。
【0067】
【数13】
【0068】
相関手段202は、受信ビート信号S(n, m)と参照信号Ex(mτ)を式(23)と式(24)によりそれぞれFFTした後、乗算する(式(25))。ここで、*は複素共役、lはPRI内サンプリング番号、L’は相関処理のFFT点数を表す。ただし、L’>Mの時にはS(n, m)に0を代入し、L’>Mτの時にはEx(mτ)に0を代入する。
【0069】
【数14】
【0070】
また、相関手段202は、相関処理後の信号を受信ビート信号のサンプリング間隔よりも高精度にサンプリングする場合、式(26)により0を設定する。ここで、Lは相関処理の高速フーリエ逆変換(IFFT:Inverse Fast Fourier Transform)点数であり、式(27)により表される。ただし、qは0以上の整数である。また、q=0の場合は、受信ビート信号のサンプリング間隔と同じサンプリング間隔になる。
【0071】
【数15】
【0072】
最後に、相関手段202は、乗算結果FV・Ex(n, kr)に対して、式(28)によりIFFTを行い、相関処理の結果、すなわちパルス圧縮後の信号RV・Ex(n, l)を出力する。また、パルス圧縮後の信号RV・Ex(n, l)のサンプリング番号lに対応するPRI内相対距離RPC(l)は式(29)により表される。
【0073】
【数16】
【0074】
ビート周波数算出手段203は、式(30)によりパルス圧縮後の信号RV・Ex(n, l)をPRI方向にH点でIFFTすることでPRI内距離−ビート周波数マップRFMRPC (kh , l)を出力する。ただし、H>Nの時にはRV・Ex(n, l)に0埋めを行う。ここで、khはPRI間FFT後のサンプリング番号を表す。また、PRI間FFT後のサンプリング番号に対応するビート周波数f(kh)は式(31)により表される。
【0075】
【数17】
【0076】
上記のように、PRI内距離−ビート周波数マップ作成手段201は、PRI内パルス圧縮とPRI間FFTを行うことにより、目標との相対距離を算出するための図3に示すPRI内距離−ビート周波数マップを目標候補検出手段220に出力する。
【0077】
次に、目標候補検出手段220は、信号の強度に基づき目標候補を検出するCFAR(Constant False Alarm Rate)処理を行う。
【0078】
図10と図11を参照しながら、CFAR処理による目標候補検出の処理内容を説明する。図10は、CFAR処理に関わる注目セル、ガードセル、サンプルセルを説明するための図である。また、図11は、CFAR処理の結果、CFAR閾値CFAR_th(kh, l)を越えるセルが集合した場合の処理内容を説明するための図である。
【0079】
目標候補検出手段220は、PRI内距離−ビート周波数マップ作成手段201から得られるPRI内距離−ビート周波数マップRFMRPC(kh, l)に対し、式(32)によりCFAR処理を行い、目標候補を検出する。ここで、RFMRPC,CFAR(kh, l)はCFAR処理による目標候補検出結果を表し、目標候補は0が設定される。ただし、abs(X)は定数Xの絶対値を表す。
【0080】
【数18】
【0081】
また、CFAR閾値 CFAR_th (kh, l) は次の式(33)により算出する。ここで、CFAR_corはCFAR係数、Samp_cell (kh, l) はサンプルセル、ave (Z(p))は配列Z(p)の平均値を表す。ただし、図11のようにCFAR閾値 CFAR_th(kh, l) を越えるセルが集合した場合は、集合のなかで振幅の最大値を示すセルを目標候補として検出する。また、複数の集合がある場合も、振幅の最大値を示すセルを目標候補として検出する。
【0082】
【数19】
【0083】
ここで、本方式では、図3で示すように、相関手段202は高分解能なPRI内距離を算出する。よって、本方式では特許文献1で示されたレーダ装置とは異なり、目標候補検出手段220は、ビート周波数の差が周波数分解能以下でも、相関手段202によりPRI内距離方向の信号が分離され、CFAR処理により2つの目標を検出できる。
【0084】
以上の処理により得られた目標候補は、周波数変調がアップチャープ時の振幅値がピークとなるセルをピークu1、ピークu2、周波数変調がダウンチャープ時の振幅値がピークとなるセルをピークd1、ピークd2とすると、ピークu1は次の式(34)、ピークu2は次の式(35)、ピークd1は次の式(36)、ピークd2は次の式(37)で表される。
【0085】
【数20】
【0086】
ただし、ピークu1のセルと対応するビート周波数をfdu1、PRI内距離をRu1’、ピークu2のセルと対応するビート周波数をfdu2、PRI内距離をRu2’、ピークd1のセルと対応するビート周波数をfdd1、PRI内距離をRd1’、ピーク2のセルと対応するビート周波数をfdd2、PRI内距離をRd2’、目標1のPRI内距離のサンプリング番号をltgt1、目標2のPRI内距離のサンプリング番号をltgt2とした。また、Kr、Kvは次の式(38)、式(39)で表される。
【0087】
【数21】
【0088】
図12と図13を参照しながら、組み合わせ手段221の処理内容を説明する。図12は、PRI内距離判定方法を説明するための図であり、図13は、複数目標の場合のビート周波数組み合わせ方法を説明するための図である。
【0089】
組み合わせ手段221では、目標候補検出手段220から入力された目標候補に対し、PRI内相対距離RPC(l)を用いて組み合わせを求める。
【0090】
図12に同一目標の判定方法を示す。ここで、Ru1’ は目標1のPRI内距離(周波数変調率がアップチャープ時)、Rd1’は目標1のPRI内距離(周波数変調率がダウンチャープ時)、Rd2’は目標2のPRI内距離(周波数変調率がダウンチャープ時)である。
【0091】
組み合わせ手段221は、図12のRu1’とRd1’とのように、PRI内距離の差が閾値γ以内であった場合、同一目標であると判定する。また、組み合わせ手段221は、図12のRu1’とRd2’とのように、PRI内距離の差が閾値γ以上であった場合、異なる目標であると判定する。
【0092】
図13に複数目標の場合の組み合わせ方法を示す。組み合わせ手段221は、図12で示した判定方法を用いて、目標候補のビート周波数の中で、PRI内距離の差が閾値以内となるもの同士を組み合わせる。以降、目標1について説明を行うが、目標2についても同様の方法を用いることができる。
【0093】
距離速度算出手段222では、組み合わせ手段221から入力されたビート周波数の組み合わせを用いて、アンビギュイティのない距離および速度を算出する。速度算出式を式(40)、アンビギュイティのない距離算出式を式(41)に示す。
【0094】
【数22】
【0095】
以上のように、本方式では、予め速度が得られなくても、ビート周波数の組み合わせにより速度項を消去してアンビギュイティのない距離を算出することができるため、移動目標についてもアンビギュイティ無く距離を算出することができる。
【0096】
距離高分解能化手段223は距離高分解能化処理を行う。
【0097】
まず、距離高分解能化手段223は、パルス折り返し数を算出する。目標距離はパルス折り返し数とPRI内距離を用いて次の式(42)により表される。よって、パルス折り返し数は、距離速度算出手段222から入力されたアンビギュイティのない距離と、相関手段202から入力されたPRI間相対距離RFM(kh)を用いて、式(43)により表される。ここで、Nrtn(1)は目標1のパルス折り返し数である。また、式(42)のRd1’の代わりにRu1’を用いても良い。
【0098】
【数23】
【0099】
ただし、距離高分解能化手段223が算出する目標1のパルス折り返し数Nrtn (1)は、ビート周波数のサンプリング誤差を含む。
【0100】
そこで、距離高分解能化手段223は、式(44)によりサンプリング誤差を除いた目標1のパルス折り返し数Nrtn’ (1)を求める。ここで、round(X)は変数Xを四捨五入した整数である。
【0101】
【数24】
【0102】
さらに、距離高分解能化手段223は、誤差を除いた目標1のパルス折り返し数Nrtn’ (1)を用いて、式(45)から高分解能な目標相対距離R0’(1)を求める。ここでも、式(45)のRd1’の代わりにRu1’を用いても良い。
【0103】
【数25】
【0104】
表示器9は、PRI内距離−ビート周波数マップと、目標候補がある場合、目標情報として目標相対距離を画面上に表示する。
【0105】
実施の形態1では、目標数が2の場合について説明したが、目標数が1、または3以上の場合も同様の効果が得られる。
【0106】
以上のように、実施の形態1によれば、ビート周波数を得るために、アップチャープの周波数変調を行い、かつ、PRI内距離を得るために、パルス内変調を施した送信RF信号を、送受信し、受信ビート信号に対し、PRI内はパルス圧縮、PRI間はFFTを行い、PRI内距離−ビート周波数マップを作成し、PRI内距離−ビート周波数マップに対し、CFAR処理により目標候補を算出し、同様の処理をダウンチャープの周波数変調を施した送信信号に対しても行い、PRI内距離を用いた組み合わせ処理によりアップチャープとダウンチャープのビート周波数の組み合わせを決定し、組み合わせ処理により得られたビート周波数の組み合わせから、目標のアンビギュイティのない距離および速度を算出し、目標のPRI内距離アンビギュィティをアンビギュイティのない距離を用いて解き、目標相対距離を算出する。
【0107】
この結果、複数目標が高分解能なPRI内距離情報を用いることにより、多目標対処可能で、かつ、距離アンビギュィティの無い高分解能な距離を算出可能なレーダ装置を得ることができる。また、先の特許文献1では、振幅値や測角値の差が小さい複数目標は、ビート周波数の組み合わせを区別することができなかったが、実施の形態1では、振幅値と測角値の差が小さい場合にも、高分解能なPRI内距離を用いることで、複数目標の距離を得ることが可能になる。さらに、先の特許文献1では、信号分離性能が、分解能の低いビート周波数の分解能に依存しており、ビート周波数の差が周波数分解能よりも小さい場合、信号の分離ができなかったが、実施の形態1では、高分解能なPRI内距離の分解能で信号を分離することができるため、目標分離性能が高い。
【0108】
実施の形態2.
この発明の実施の形態2に係るレーダ装置について図14から図19までを参照しながら説明する。図14は、この発明の実施の形態2に係るレーダ装置の構成を示す処理ブロック図である。
【0109】
図14において、この発明の実施の形態2に係るレーダ装置は、空中線1と、送信手段2と、送受切替器7と、受信手段100と、信号処理器200Bと、表示器9とが設けられている。
【0110】
この実施の形態2に係るレーダ装置は、実施の形態1に係るレーダ装置と信号処理器200Bが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。
【0111】
すなわち、信号処理器200Bは、図14に示すように、実施の形態1に係る信号処理器200のPRI内距離−ビート周波数マップ作成手段201に代えて、フィルタ処理手段204を加えたPRI内距離−ビート周波数マップ作成手段201Bを有することが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。
【0112】
信号処理器200Bは、図15に示す処理を受信ビート信号に対して行う。
【0113】
実施の形態2では、クラッタとしてさらに地上クラッタサイドローブを想定し、地上クラッタサイドローブの低減を目的として、フィルタ処理を行う。強度の大きい地上クラッタがある場合、図16のように目標が地上クラッタメインローブと異なる距離においても、図17のように目標が地上クラッタサイドローブに埋もれる可能性がある。
【0114】
フィルタ処理手段204は、地上クラッタメインローブを減衰させ、それに伴い地上クラッタサイドローブを減衰させるフィルタのパラメータを次の式(46)、式(47)、式(48)、式(49)により算出する。ここで、fc1、fc2は阻止域エッジ周波数、fa1、fa2はカットオフ周波数、αは予め設定した阻止域帯域幅に余裕を持たせる帯域幅、βは予め設定した遷移帯域幅、Acは予め設定した通過域リプル量、Aaは予め設定した阻止域減衰量である。また、min(X, Y)は変数XとYの最小値、max(X, Y)は変数XとYの最大値を表す。
【0115】
【数26】
【0116】
フィルタ処理手段204は、式(46)〜式(49)により算出されたパラメータと予め設定したフィルタ特性を持つNflt次のフィルタflt(p)を作成する。
実施の形態2では、フィルタとしてFIR(Finite Impulse Response)フィルタを用いて説明するが、IIR(Infinite Impulse Response)フィルタを用いた場合も同様の効果を得ることが可能である。
【0117】
フィルタ処理手段204は、図18に示すように、地上クラッタメインローブが減衰するようなフィルタ特性を持たせているため、フィルタ処理後は地上クラッタメインローブと地上クラッタサイドローブを減衰することが可能になる。
【0118】
フィルタ処理手段204は、地上クラッタサイドローブの低減を目的として、パルス圧縮後の信号RV・Ex(n, l)に対して、次の式(50)によりPRI方向にフィルタ処理を行い、フィルタ処理後の信号Rflt(n, l)を出力する。
【0119】
【数27】
【0120】
ビート周波数算出手段203は、入力されたフィルタ処理後の信号Rflt(n, l)に対し、PRI方向にH点でIFFTすることでPRI内距離−ビート周波数マップRFMRPC (kh , l)を出力する。
【0121】
図19に示すように、フィルタ処理を行うことにより、PRI内距離−ビート周波数マップのビート周波数方向の地上クラッタメインローブとサイドローブが低減し、目標検出性能が向上する。
【0122】
以上のように、実施の形態2によれば、目標が地上クラッタサイドローブに埋もれないようにフィルタ処理を加えて行うフィルタ処理手段204を備えているので、クラッタ分離性能の向上、つまり目標検出性能の向上を図ったレーダ装置を得ることできる。
【0123】
実施の形態3.
この発明の実施の形態3に係るレーダ装置について図20から図23までを参照しながら説明する。図20は、この発明の実施の形態3に係るレーダ装置の構成を示す処理ブロック図である。
【0124】
図20において、この発明の実施の形態3に係るレーダ装置は、空中線1と、送信手段2と、送受切替器7と、受信手段100と、信号処理器200Cと、表示器9とをが設けられている。
【0125】
この実施の形態3に係るレーダ装置は、上記の実施の形態1に係るレーダ装置と信号処理器200Cが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。
【0126】
すなわち、信号処理器200Cは、図20に示すように、実施の形態1に係る信号処理器200のPRI内距離−ビート周波数マップ作成手段201のビート周波数算出手段203に代えて、距離−ビート周波数マップ作成手段201Cのビート周波数算出手段203Bを有することが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。
【0127】
信号処理器200Cは、図21に示す処理を受信ビート信号に対して行う。
【0128】
ビート周波数算出手段203Bは、PRI間FFTのための窓関数windFM(n)を次の式(51)により算出する。ここでは、PRI間FFTのための窓関数をハミング窓として説明をするが、他の窓関数を用いた場合も同様の効果を得ることが可能である。また、実施の形態3ではPRI内に符号変調を行っているが、PRI内に符号変調以外の変調を行った場合、図22に示すように、PRI内に窓関数を用いることにより同様の効果を得ることが可能である。
【0129】
【数28】
【0130】
ビート周波数算出手段203Bは、次の式(52)により窓関数処理を行ったPRI間FFTのための窓関数windFM(n)を乗算し、PRI方向に窓関数処理を行ったパルス圧縮後の信号R”V・Ex(n, l)を算出する。
【0131】
【数29】
【0132】
ビート周波数算出手段203Bは、パルス圧縮後の信号RV・Ex(n, l)に代えてPRI方向に窓関数処理を行ったパルス圧縮後の信号R”V・Ex(n, l)を式(30)に従いPRI方向にH点でIFFTすることでPRI内距離−ビート周波数マップRFMRPC (kh , l)を出力する。
【0133】
図23に示すように、PRI間FFTの際に窓関数処理を加えて行うことにより、地上クラッタサイドローブが低減し、目標検出性能が向上する。
【0134】
以上のように、実施の形態3によれば、目標が地上クラッタサイドローブに埋もれないように窓関数処理を加えて行うビート周波数算出手段203Bを備えているので、クラッタ分離性能の向上、つまり目標検出性能の向上を図ったレーダ装置を得ることできる。また、ビート周波数算出手段203Bに代えてビート周波数算出手段203を用いた場合においてもそれぞれに同様の効果を得ることができる。
【0135】
実施の形態4.
この発明の実施の形態4に係るレーダ装置について図24から図25までを参照しながら説明する。図24は、この発明の実施の形態4に係るレーダ装置の構成を示す処理ブロック図である。
【0136】
図24において、この発明の実施の形態4に係るレーダ装置は、空中線1と、送信手段2Bと、送受切替器7と、受信手段100と、信号処理器200と、表示器9とが設けられている。
【0137】
この発明の実施の形態4に係るレーダ装置は、実施の形態1に係るレーダ装置と送信手段2Bが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。
【0138】
すなわち、送信手段2Bは、図24に示すように、実施の形態1に係る送信手段2の局部発振器6に代えて、局部発振器6Bを有し、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。
【0139】
送信手段2Bは、式(4)〜式(6) を満たすビート周波数分解能ΔfFM’とサンプリング間隔ΔfFM、相関処理後の距離分解能ΔR’PC、1PRIの折り返し距離Rpriのパラメータが設定される。
【0140】
以降、図25を参照しながら、局部発振器6Bの動作について説明する。この局部発振器6Bは、送信信号周波数掃引時間TL、送信信号帯域幅BLでPRI間隔に段階的に周波数変調された次の式(53)で表される局部発振信号L0(t)を生成し、パルス変調器5と受信手段100に出力する。ここで、PRI間隔の周波数変調幅Δfは式(54)により算出する。
【0141】
【数30】
【0142】
局部発振器6Bでは段階的に周波数変調を行っているが受信ビート信号に対する処理は同じ処理を行うため、信号処理器200は、図9に示す処理を受信ビート信号に対して行う。ただし、段階的に周波数変調しているためビート周波数のサンプリング間隔はビート周波数分解能ΔfFM’と同じになる。パルス内を周波数変調する必要がなくなり、ハードウェアの規模を小さくすることが可能になる。
【0143】
以上のように、この実施の形態4によれば、パルス内を周波数変調する必要がなくなり、ハードウェアの規模を小さくすることが可能になり、かつ、目標相対距離を精度良く算出することが可能なレーダ装置を得ることができる。
【産業上の利用可能性】
【0144】
この発明のレーダ装置は、複数目標までの距離を測定することができ、例えば複数の船舶や、複数の航空機等の目標探知に利用される可能性がある。
【符号の説明】
【0145】
1 空中線、2、2B 送信手段、3 送信機、4 パルス内変調信号発生器、5 パルス変調器、6、6B 局部発振器、7 送受切替器、8 受信機、9 表示器、100 受信手段、200、200B、200C 信号処理手段、201、201B、201C PRI内距離−ビート周波数マップ作成手段、202 相関手段、203、203B ビート周波数算出手段、204 フィルタ処理手段、220 目標候補検出手段、221 組み合わせ手段、222 距離速度算出手段、223 距離高分解能化手段。
【特許請求の範囲】
【請求項1】
PRI (Pulse Repetition Interval) 内距離の距離アンビギュィティを解消できるアンビギュイティのない距離の分解能と、ビート周波数分解能よりPRI内距離分解能が高精度になるようなパラメータに基づき送信信号の異なる周波数変調率を複数選択し、得られた周波数変調率で複数のPRIに亘ってチャープ上に周波数変調されたキャリア信号を放射する送信手段と、
目標で反射して戻った前記送信手段から得られる送信信号を受信信号として受信し、この受信信号に対して、前記送信手段から得られる前記キャリア信号を用いてダウンコンバートし受信ビート信号に変換する受信手段と、
前記受信手段から得られる受信ビート信号に対しPRI間FFT (Fast Fourier Transform) を行い、目標との相対距離を算出するためのPRI内距離−ビート周波数マップを作成するPRI内距離−ビート周波数マップ作成手段と、
前記PRI内距離−ビート周波数マップ作成手段から得られるPRI内距離−ビート周波数マップに対し、信号の強度に基づき目標候補を検出する目標候補検出手段と、
前記目標候補検出手段から得られる目標候補に対し、PRI内距離を用いて目標候補同士を組み合わせる組み合わせ手段と、
前記組み合わせ手段により得られる組み合わせを用いて、目標候補のビート周波数を組み合わせ、アンビギュイティのない距離および速度を算出する距離速度算出手段と、
前記距離速度算出手段により得られるアンビギュイティのない距離を用いて、PRI内距離の距離アンビギュィティを解消し目標との相対距離を算出する距離高分解能化手段と
を備えたことを特徴とするレーダ装置。
【請求項2】
前記PRI内距離−ビート周波数マップ作成手段は、レーダ装置とクラッタの関係に基づき、クラッタの影響を低減するフィルタ処理を行うフィルタ処理手段を備えることを特徴とする請求項1に記載のレーダ装置。
【請求項3】
前記PRI内距離−ビート周波数マップ作成手段は、
参照信号と受信機からの受信ビート信号との相関処理を行う相関手段と、
相関手段により相関処理された信号にクラッタの影響を低減する窓関数処理を行いPRI方向にIFFT処理をしPRI内距離−ビート周波数マップを出力するビート周波数算出手段を備えることを特徴とする請求項1に記載のレーダ装置。。
【請求項4】
前記送信手段に代えて、PRI内距離の距離アンビギュイティを解消できるアンビギュイティのない距離の距離分解能と、アンビギュイティのない距離の距離分解能よりPRI内距離分解能が高精度になるようなパラメータに基づき、複数のPRIに渡って段階的に周波数変調したキャリア信号に対してPRIでパルス変調された送信信号を放射する送信手段を備えたことを特徴とする請求項1に記載のレーダ装置。
【請求項5】
前記送信手段は、前記キャリア信号に対してPRIでパルス内変調を加え、
前記PRI内距離−ビート周波数マップ作成手段は、前記受信ビート信号に対してパルス内変調との相関処理を加えることを特徴とする請求項1から請求項4の何れか1項に記載のレーダ装置。
【請求項1】
PRI (Pulse Repetition Interval) 内距離の距離アンビギュィティを解消できるアンビギュイティのない距離の分解能と、ビート周波数分解能よりPRI内距離分解能が高精度になるようなパラメータに基づき送信信号の異なる周波数変調率を複数選択し、得られた周波数変調率で複数のPRIに亘ってチャープ上に周波数変調されたキャリア信号を放射する送信手段と、
目標で反射して戻った前記送信手段から得られる送信信号を受信信号として受信し、この受信信号に対して、前記送信手段から得られる前記キャリア信号を用いてダウンコンバートし受信ビート信号に変換する受信手段と、
前記受信手段から得られる受信ビート信号に対しPRI間FFT (Fast Fourier Transform) を行い、目標との相対距離を算出するためのPRI内距離−ビート周波数マップを作成するPRI内距離−ビート周波数マップ作成手段と、
前記PRI内距離−ビート周波数マップ作成手段から得られるPRI内距離−ビート周波数マップに対し、信号の強度に基づき目標候補を検出する目標候補検出手段と、
前記目標候補検出手段から得られる目標候補に対し、PRI内距離を用いて目標候補同士を組み合わせる組み合わせ手段と、
前記組み合わせ手段により得られる組み合わせを用いて、目標候補のビート周波数を組み合わせ、アンビギュイティのない距離および速度を算出する距離速度算出手段と、
前記距離速度算出手段により得られるアンビギュイティのない距離を用いて、PRI内距離の距離アンビギュィティを解消し目標との相対距離を算出する距離高分解能化手段と
を備えたことを特徴とするレーダ装置。
【請求項2】
前記PRI内距離−ビート周波数マップ作成手段は、レーダ装置とクラッタの関係に基づき、クラッタの影響を低減するフィルタ処理を行うフィルタ処理手段を備えることを特徴とする請求項1に記載のレーダ装置。
【請求項3】
前記PRI内距離−ビート周波数マップ作成手段は、
参照信号と受信機からの受信ビート信号との相関処理を行う相関手段と、
相関手段により相関処理された信号にクラッタの影響を低減する窓関数処理を行いPRI方向にIFFT処理をしPRI内距離−ビート周波数マップを出力するビート周波数算出手段を備えることを特徴とする請求項1に記載のレーダ装置。。
【請求項4】
前記送信手段に代えて、PRI内距離の距離アンビギュイティを解消できるアンビギュイティのない距離の距離分解能と、アンビギュイティのない距離の距離分解能よりPRI内距離分解能が高精度になるようなパラメータに基づき、複数のPRIに渡って段階的に周波数変調したキャリア信号に対してPRIでパルス変調された送信信号を放射する送信手段を備えたことを特徴とする請求項1に記載のレーダ装置。
【請求項5】
前記送信手段は、前記キャリア信号に対してPRIでパルス内変調を加え、
前記PRI内距離−ビート周波数マップ作成手段は、前記受信ビート信号に対してパルス内変調との相関処理を加えることを特徴とする請求項1から請求項4の何れか1項に記載のレーダ装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】

【図10】
【図11】
【図12】
【図13】
【図14】
【図15】

【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【公開番号】特開2012−42214(P2012−42214A)
【公開日】平成24年3月1日(2012.3.1)
【国際特許分類】
【出願番号】特願2010−180777(P2010−180777)
【出願日】平成22年8月12日(2010.8.12)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成24年3月1日(2012.3.1)
【国際特許分類】
【出願日】平成22年8月12日(2010.8.12)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]