
レーダ装置
【課題】少ない演算量で、目標の3次元速度ベクトルを推定することができるレーダ装置を得ることを目的とする。
【解決手段】目標信号検出手段により検出された目標信号のうち、送受信局00及び受信局01,02,10,11の中で基準となる局により受信されたパルスから検出された目標信号と基準局以外の局により受信されたパルスから検出された目標信号との位相差の変化率を算出する位相差変化率算出手段とを設け、速度ベクトル算出手段が、位相差変化率算出手段により算出された位相差の変化率が、目標のクロスレンジ方向の速度に比例するものとして、その位相差の変化率から目標の速度ベクトルの推定値を算出する。
【解決手段】目標信号検出手段により検出された目標信号のうち、送受信局00及び受信局01,02,10,11の中で基準となる局により受信されたパルスから検出された目標信号と基準局以外の局により受信されたパルスから検出された目標信号との位相差の変化率を算出する位相差変化率算出手段とを設け、速度ベクトル算出手段が、位相差変化率算出手段により算出された位相差の変化率が、目標のクロスレンジ方向の速度に比例するものとして、その位相差の変化率から目標の速度ベクトルの推定値を算出する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、マルチスタティック観測により目標の速度ベクトルを推定するレーダ装置に関するものである。
【背景技術】
【0002】
パルスを送信する1つ以上の送信局と、パルスを受信する3つ以上の受信局とから構成されているマルチスタティックレーダを用いることで、複数の受信局により受信されたパルスから検出される目標信号のドップラー周波数から、目標の3次元速度ベクトルを推定することができることは自明であり、従来から知られている(例えば、特許文献1を参照)。
しかし、Low PRF(Pulse Repetition Frequency) レーダにおいては、ドップラー周波数の折り返し(アンビギュイティ)が発生するため、ドップラー周波数の観測値を用いて、高速移動目標の速度を正確に推定することは困難である。
【0003】
そこで、以下の非特許文献1,2では、高速移動目標の速度を正確に推定するために、最尤推定のアプローチで、目標の速度ベクトルを推定する方式を提案している。
ただし、最尤推定のアプローチでは、演算量の増大が避けられない問題がある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平9−292463号公報(段落番号[0021])
【非特許文献】
【0005】
【非特許文献1】E. Insanic,P. Siqueira,“Velocity unfolding in networked radar system,”IEEE International Geoscience and Remote Sensing Symposium,2008. (IGARSS 2008),pp.III-1103 − III-1106
【非特許文献2】E. Insanic,P. Siqueira,“Use of vector velocity estimate accuracy for improved resource allocation in a network of Doppler radars,”IEEE International Geoscience and Remote Sensing Symposium,2008. (IGARSS 2008),pp.III-1123 − III-1126
【発明の概要】
【発明が解決しようとする課題】
【0006】
従来のレーダ装置は以上のように構成されているので、Low PRFモードで運用されるマルチスタティックレーダを用いて、目標の3次元速度ベクトルを推定する場合、ドップラー周波数の折り返し(アンビギュイティ)が発生しているため、高速移動目標の速度を正確に推定することが困難である課題があった。
最尤推定のアプローチで、目標の速度ベクトルを推定すれば、高速移動目標の速度を正確に推定することが可能であるが、演算量が増大してしまう課題があった。
【0007】
この発明は上記のような課題を解決するためになされたもので、少ない演算量で、目標の3次元速度ベクトルを推定することができるレーダ装置を得ることを目的とする。
【課題を解決するための手段】
【0008】
この発明に係るレーダ装置は、パルスを送信するとともに、目標に反射されて戻ってくる上記パルスを受信する送受信局と、送受信局から送信された後、目標に反射されたパルスを受信する複数の受信局と、送受信局により受信されたパルスから目標信号を検出するとともに、受信局により受信されたパルスから目標信号を検出する目標信号検出手段と、目標信号検出手段により検出された目標信号のうち、送受信局及び受信局の中で基準となる局により受信されたパルスから検出された目標信号と基準局以外の局により受信されたパルスから検出された目標信号との位相差の変化率を算出する位相差変化率算出手段とを設け、速度ベクトル算出手段が、位相差変化率算出手段により算出された位相差の変化率が、目標のクロスレンジ方向の速度に比例するものとして、その位相差の変化率から目標の速度ベクトルの推定値を算出するようにしたものである。
【発明の効果】
【0009】
この発明によれば、パルスを送信するとともに、目標に反射されて戻ってくる上記パルスを受信する送受信局と、送受信局から送信された後、目標に反射されたパルスを受信する複数の受信局と、送受信局により受信されたパルスから目標信号を検出するとともに、受信局により受信されたパルスから目標信号を検出する目標信号検出手段と、目標信号検出手段により検出された目標信号のうち、送受信局及び受信局の中で基準となる局により受信されたパルスから検出された目標信号と基準局以外の局により受信されたパルスから検出された目標信号との位相差の変化率を算出する位相差変化率算出手段とを設け、速度ベクトル算出手段が、位相差変化率算出手段により算出された位相差の変化率が、目標のクロスレンジ方向の速度に比例するものとして、その位相差の変化率から目標の速度ベクトルの推定値を算出するように構成したので、少ない演算量で、目標の3次元速度ベクトルを推定することができる効果がある。
【図面の簡単な説明】
【0010】
【図1】この発明の実施の形態1によるレーダ装置による観測のジオメトリを示す説明図である。
【図2】この発明の実施の形態1によるレーダ装置を示す構成図である。
【図3】STFT処理部105−0〜105−4の処理内容を示す説明図である。
【図4】この発明の実施の形態2によるレーダ装置を示す構成図である。
【発明を実施するための形態】
【0011】
実施の形態1.
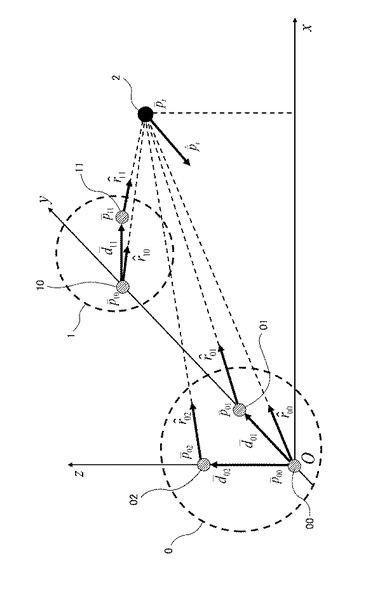
図1はこの発明の実施の形態1によるレーダ装置による観測のジオメトリを示す説明図である。
送受信局00はパルスを送信するとともに、観測対象の移動目標2に反射されて戻ってくる上記パルスを受信し、受信局01,02,10,11は送受信局00から送信された後、移動目標2に反射されたパルスを受信する。
送受信局00と受信局01,02からレーダサイト0が構成されており、受信局10,11からレーダサイト1が構成されている。
【0012】
図1では、Oを原点とする直交座標系のx,y,z座標が定義されている。
x,y,z座標の軸の向きは任意であるが、例えば、x,y平面が水平面を表し、zが鉛直方向上向きを表すと考えてよい。
ここで、p00バー(明細書では、電子出願の関係上、文字の上に付記されている“−”を表記することができないので、p00バーのように表記する)は送受信局00の位置を表す位置ベクトルである。
図1の例では、p00バーを原点Oの位置に合わせているが、p00バーは任意の位置で構わない。
【0013】
p01バーは受信局01の位置を表す位置ベクトル、p02バーは受信局02の位置を表す位置ベクトル、p10バーは受信局10の位置を表す位置ベクトル、p11バーは受信局11の位置を表す位置ベクトルである。
また、ptバーは移動目標2の位置を表す位置ベクトルであり、ptバードット(明細書では、電子出願の関係上、文字の上に付記されている“・”を表記することができないので、p00バードットのように表記する)は移動目標2の速度を表す速度ベクトルである。
【0014】
r00ハット(明細書では、電子出願の関係上、文字の上に付記されている“^”を表記することができないので、r00ハットのように表記する)は送受信局00から移動目標2に向かう向きを表す単位ベクトル、r01ハットは受信局01から移動目標2に向かう向きを表す単位ベクトル、r02ハットは受信局02から移動目標2に向かう向きを表す単位ベクトル、r10ハットは受信局10から移動目標2に向かう向きを表す単位ベクトル、r11ハットは受信局11から移動目標2に向かう向きを表す単位ベクトルである。
【0015】
d01バーはレーダサイト0において、送受信局00を基準にして、送受信局00から受信局01を結ぶベクトル(以下、「基線ベクトル」と称する)であり、d02バーはレーダサイト0において、送受信局00を基準にして、送受信局00から受信局02を結ぶ基線ベクトルである。
d11バーはレーダサイト1において、受信局10を基準にして、受信局10から受信局11を結ぶ基線ベクトルである。
基線ベクトルd01バー,d02バー,d11バーは、下記の式(1)の関係を満たしている。

【0016】
本明細書では、文字の上に“−”が付記されている変数は空間内のベクトルを表し、文字の上に“・”が付記されている変数は、当該変数の時間微分を表している。
また、文字の上に二重のバーである“=”が付記されている変数は行列を表し、文字の上に“^”が付記されている変数は長さが1の単位ベクトルを表している。
【0017】
ここで、移動目標2から送受信局00及び受信局01,受信局02,受信局10,受信局11までの距離r00,r01,r02,r10,r11を下記の式(2)のように定義する。
【0018】
以下、移動目標2から送受信局00及び受信局01,受信局02,受信局10,受信局11までの距離r00,r01,r02,r10,r11が、基線ベクトルd01バー,d02バー,d11バーの長さに対して、十分に長いものとする。
即ち、下記の次(3)の関係を満たしているものとする。
【0019】
以上で説明した図1のジオメトリにおいて、本質的に重要な点は、3つの基線ベクトルd01バー,d02バー,d11バーと、各レーダサイトの基準局から移動目標2に向かう単位ベクトルr00ハット,r10ハットとの配置関係であり、これらのベクトルは、以下の関係を満たしている必要がある。
【0020】
図1の例では、観測対象領域内に移動目標2が1つだけ存在しており、この実施の形態1では、移動目標2が1つである例を説明するが、移動目標2が複数存在する場合、後述する目標の検出処理を実施した後に、各受信局で検出された目標信号の対応付け処理が必要になるが、適切な対応付けが行われた後の処理は、移動目標2が1つである場合と同様である。
【0021】
ここで、実施の形態1によるレーダ装置の動作を具体的に説明する前に、図1のジオメトリによって観測される信号について説明する。
送受信局00から送信されたのち、移動目標2によって散乱されたパルス信号は、送受信局00及び受信局01,受信局02,受信局10,受信局11により受信される。
送受信局00及び受信局01,受信局02,受信局10,受信局11の受信信号から検出される目標信号のピーク複素振幅を、それぞれs00,s01,s02,s10,s11とすると、各レーダサイトの基準局の受信信号に対する他の受信局の受信信号の位相差φ01,φ02,φ11は、下記の式(4)〜(6)の関係を満足する。
この実施の形態1では、レーダサイト0の基準局を送受信局00、レーダサイト1の基準局を受信局10としている。
【0022】
【0023】
式(4)〜(6)は、アレイアンテナを用いて、遠方からの到来波を受信する際に、その到来角度によって決まるアレイ素子間の位相差の式に他ならない。
移動目標2の移動に伴って、移動目標2の位置ベクトルptバーが変化するため、受信信号の位相差φ01,φ02,φ11は時変であるが、短時間の間では、その変化はほぼ線形とみなすことができるため、その位相差φ01,φ02,φ11の変化率φ01ドット,φ02ドット,φ11ドットは、下記の式(7)〜(9)で表される。
【0024】
【0025】
ただし、式(7)〜(9)の導出には、下記の式(10)に示す関係及び近似を用いている。
【0026】
なお、式(7)〜(9)のAは、レンジ方向r00ハットに直交する平面への射影行列であることから、位相差φ01,φ02,φ11の変化率φ01ドット,φ02ドット,φ11ドットは、目標速度のクロスレンジ方向の速度に比例することが分かる。
また、単位ベクトルr00ハット,r10ハットと、基線ベクトルd01バー,d02バー,d11バーとが、上述した関係を満たす場合、式(7)〜(9)の連立方程式を解くことにより、移動目標2の速度ベクトルptバードットを推定できることが分かる。
【0027】
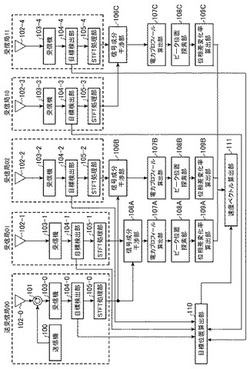
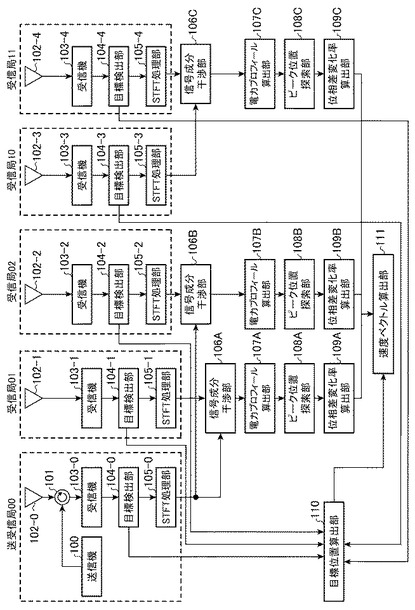
図2はこの発明の実施の形態1によるレーダ装置を示す構成図である。
図2において、送信機100は送受信局00内に搭載されており、tpriの繰り返し周期(PRI:Pulse Repetition Interval)で、Nh個のパルスを出力する処理を実施する。
送受切換器101は送信機100から出力されたパルスを送受信アンテナ102−0に出力する一方、送受信アンテナ102−0の受信信号であるパルスを受信機103−0に出力する処理を実施する。
【0028】
送受信局00内の送受信アンテナ102−0は送受切換器101から出力されたパルスを空間に放射する一方、観測対象の移動目標2によって散乱されて戻ってきたパルスを受信する。
受信局01,02,10,11内の受信アンテナ102−1〜102−4は送受信局00内の送受信アンテナ102−0から空間に放射された後、移動目標2によって散乱されたパルスを受信する。
受信機103−0〜103−4は送受信アンテナ102−0,受信アンテナ102−1〜102−4の受信信号に対して、位相検波処理とA/D変換処理を実施することで、その受信信号の振幅と位相を示すディジタル受信信号を目標検出部104−0〜104−4に出力する処理を実施する。
【0029】
目標検出部104−0〜104−4は受信機103−0〜103−4から出力されたディジタル受信信号に対するCFAR(Constant False Alarm Rate)などの目標検出処理を実施する。
即ち、目標検出部104−0〜104−4は受信機103−0〜103−4から出力されたディジタル受信信号から目標信号が存在しているレンジセルを検出することで、送受信局00及び受信局01,02,10,11から移動目標2までの距離r00,r01,r02,r10,r11と、目標信号のドップラー周波数を算出する処理を実施する。
信号成分抽出部であるSTFT処理部105−0〜105−4は目標検出部104−0〜104−4により検出されたレンジセルの信号と目標検出部104−0〜104−4により算出された目標信号のドップラー周波数を用いて、目標信号のドップラー周波数に対応する信号成分を抽出する処理を実施する。
なお、目標検出部104−0〜104−4及びSTFT処理部105−0〜105−4から目標信号検出手段が構成されている。
図2では、目標検出部104−0〜104−4及びSTFT処理部105−0〜105−4が、送受信局00,受信局01,02,10,11の内部に実装されている例を示しているが、送受信局00,受信局01,02,10,11の外部に実装されていてもよい。
【0030】
信号成分干渉部106Aはレーダサイト0の基準局である送受信局00内のSTFT処理部105−0から出力されたドップラー周波数に対応する信号成分と、基準局以外の局である受信局01内のSTFT処理部105−1から出力されたドップラー周波数に対応する信号成分とを干渉させて、その干渉結果を示す干渉信号を電力プロフィール算出部107Aに出力する処理を実施する。
信号成分干渉部106Bはレーダサイト0の基準局である送受信局00内のSTFT処理部105−0から出力されたドップラー周波数に対応する信号成分と、基準局以外の局である受信局02内のSTFT処理部105−2から出力されたドップラー周波数に対応する信号成分とを干渉させて、その干渉結果を示す干渉信号を電力プロフィール算出部107Bに出力する処理を実施する。
【0031】
信号成分干渉部106Cはレーダサイト1の基準局である送受信局10内のSTFT処理部105−3から出力されたドップラー周波数に対応する信号成分と、基準局以外の局である受信局11内のSTFT処理部105−4から出力されたドップラー周波数に対応する信号成分とを干渉させて、その干渉結果を示す干渉信号を電力プロフィール算出部107Cに出力する処理を実施する。
電力プロフィール算出部107A〜107Cは信号成分干渉部106A〜106Cから出力された干渉信号に対する高速フーリエ変換処理を実施することで、電力プロフィールを算出する処理を実施する。
【0032】
ピーク位置探索部108A〜108Cは電力プロフィール算出部107A〜107Cにより算出された電力プロフィールのピーク位置を探索する処理を実施する。
位相差変化率算出部109A〜109Cはピーク位置探索部108A〜108Cにより探索されたピーク位置から位相差の変化率φ01ドット,φ02ドット,φ11ドットを算出する処理を実施する。
なお、信号成分干渉部106A〜106C、電力プロフィール算出部107A〜107C、ピーク位置探索部108A〜108C及び位相差変化率算出部109A〜109Cから位相差変化率算出手段が構成されている。
【0033】
目標位置算出部110は目標検出部104−0〜104−4により算出された目標までの距離r00,r01,r02,r10,r11を用いて、移動目標2が存在している位置ptバーの推定値を算出する処理を実施する。
速度ベクトル算出部111は位相差変化率算出部109A〜109Cにより算出された位相差の変化率φ01ドット,φ02ドット,φ11ドットが、移動目標2のクロスレンジ方向の速度に比例するものとして、その位相差の変化率φ01ドット,φ02ドット,φ11ドットと目標位置算出部110により算出された位置ptバーの推定値から移動目標の速度ベクトルの推定値を算出する処理を実施する。
なお、目標位置算出部110及び速度ベクトル算出部111から速度ベクトル算出手段が構成されている。
【0034】
図2の例では、レーダ装置の構成要素である送信機100、送受切換器101、送受信アンテナ102−0、受信アンテナ102−1〜102−4、受信機103−0〜103−4、目標検出部104−0〜104−4、STFT処理部105−0〜105−4、信号成分干渉部106A〜106C、電力プロフィール算出部107A〜107C、ピーク位置探索部108A〜108C、位相差変化率算出部109A〜109C、目標位置算出部110及び速度ベクトル算出部111のそれぞれが専用のハードウェア(例えば、CPUを実装している半導体集積回路、あるいは、ワンチップマイコンなど)で構成されているものを想定しているが、レーダ装置の全部又は一部がコンピュータで構成されていてもよい。
例えば、送信機100、送受切換器101、送受信アンテナ102−0、受信アンテナ102−1〜102−4及び受信機103−0〜103−4を除く構成要素をコンピュータで構成する場合、目標検出部104−0〜104−4、STFT処理部105−0〜105−4、信号成分干渉部106A〜106C、電力プロフィール算出部107A〜107C、ピーク位置探索部108A〜108C、位相差変化率算出部109A〜109C、目標位置算出部110及び速度ベクトル算出部111の処理内容を記述しているプログラムをコンピュータのメモリに格納し、当該コンピュータのCPUが当該メモリに格納されているプログラムを実行するようにすればよい。
【0035】
次に動作について説明する。
まず、送受信局00内の送信機100が、繰り返し周期tpriで、Nh個のパルスを出力する。
送受信局00内の送受切換器101は、送信機100からパルスを受けると、そのパルスを送受信アンテナ102−0に出力する。
これにより、送受信局00内の送受信アンテナ102−0からパルスが空間に放射される。
【0036】
その後、送受信局00内の送受信アンテナ102−0は、観測対象の移動目標2によって散乱されて戻ってきたNh個のパルスを受信する。
受信局01,02,10,11内の受信アンテナ102−1〜102−4は、送受信局00内の送受信アンテナ102−0から空間に放射された後、移動目標2によって散乱されたNh個のパルスを受信する。
受信機103−0〜103−4は、送受信アンテナ102−0,受信アンテナ102−1〜102−4の受信信号に対して、位相検波処理とA/D変換処理を実施することで、その受信信号の振幅と位相を検波し、その受信信号の振幅と位相を示すディジタル受信信号を目標検出部104−0〜104−4に出力する。
【0037】
目標検出部104−0〜104−4は、受信機103−0〜103−4からディジタル受信信号を受けると、そのディジタル受信信号に対するCFAR(Constant False Alarm Rate)などの目標検出処理を実施する。
ただし、低SNR環境下では、例えば、一旦、Nh点のフーリエ変換によるコヒーレント積分を実施することで、目標信号が存在しているレンジセルを特定する必要があるため、目標検出部104−0〜104−4は、ディジタル受信信号に対するフーリエ変換によるコヒーレント積分を実施して、目標信号が存在しているレンジセルを特定することで、送受信局00及び受信局01,02,10,11から移動目標2までの距離r00,r01,r02,r10,r11と、目標信号のドップラー周波数を算出する。
【0038】
なお、目標検出部104−0〜104−4により算出された目標信号のドップラー周波数は、STFT処理部105−0〜105−4に与えられるが、このドップラー周波数には、一般に折り返しが含まれているため、このドップラー周波数から、アンビギュイティなく移動目標2の速度に変換することはできない。
ただし、後述するSTFT処理部105−0〜105−4における信号成分の抽出処理では、折り返しが含まれているドップラー周波数でも構わない。
【0039】
STFT処理部105−0〜105−4は、目標検出部104−0〜104−4が目標信号のドップラー周波数を算出すると、目標信号が存在しているレンジセルの信号と目標信号のドップラー周波数を用いて、目標信号のドップラー周波数に対応する信号成分を抽出する。
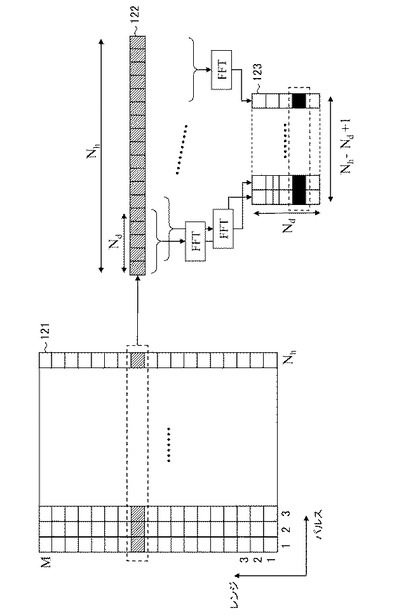
ここで、図3はSTFT処理部105−0〜105−4の処理内容を示す説明図である。
図3において、121は受信機103−0〜103−4から出力されたレンジ圧縮処理後の受信信号を表しており、レンジセル数M、パルス数Nhの信号である。
122は目標検出部104−0〜104−4により目標信号が検出されたレンジセルの信号の集合である。
123は目標信号のドップラー周波数に対応するドップラーセルの信号の集合である。
【0040】
以下、図3を参照しながら、STFT処理部105−0〜105−4の処理内容を具体的に説明する。
STFT処理部105−0〜105−4は、目標検出部104−0〜104−4により目標信号が検出されたレンジセルの信号の集合122について、Nd点の短時間フーリエ変換処理(STFT:Short Time Fourier Transform)を実施する。
図3に示すように、短時間フーリエ変換処理においては、Nh個のサンプルの中から連続するNd個のサンプルを取り出して、FFTを適用する。
さらに、図3に示すように、取り出すサンプルのセットを少しずつずらしながら、FFTを適用する。
図3では、取り出すサンプルを1サンプルずつずらす例を示しており、この場合、取り出されるサンプルのセットの総数は、Nh−Nd+1になる。ただし、ずらし量は1サンプル以上でも構わない。
【0041】
STFT処理部105−0〜105−4は、レンジセルの信号の集合122について、Nd点の短時間フーリエ変換処理を実施すると、図3に示すように、その変換結果から目標信号のドップラー周波数に対応する信号123(目標信号のドップラー周波数に対応する信号成分)を取り出して出力する。
送受信局00及び受信局01,02,10,11において取り出される信号s00(h),s01(h),s02(h),s10(h),s11(h)は、下記の式(11)で表される。
【0042】
【0043】
信号成分干渉部106Aは、レーダサイト0の基準局である送受信局00内のSTFT処理部105−0から出力されたドップラー周波数に対応する信号s00(h)と、基準局以外の局である受信局01内のSTFT処理部105−1から出力されたドップラー周波数に対応する信号s01(h)とを干渉させて、その干渉結果を示す干渉信号を電力プロフィール算出部107Aに出力する。
信号成分干渉部106Bは、レーダサイト0の基準局である送受信局00内のSTFT処理部105−0から出力されたドップラー周波数に対応する信号s00(h)と、基準局以外の局である受信局02内のSTFT処理部105−2から出力されたドップラー周波数に対応する信号s02(h)とを干渉させて、その干渉結果を示す干渉信号を電力プロフィール算出部107Bに出力する。
【0044】
信号成分干渉部106Cは、レーダサイト1の基準局である送受信局10内のSTFT処理部105−3から出力されたドップラー周波数に対応する信号s10(h)と、基準局以外の局である受信局11内のSTFT処理部105−4から出力されたドップラー周波数に対応する信号s11(h)とを干渉させて、その干渉結果を示す干渉信号を電力プロフィール算出部107Cに出力する。
信号成分干渉部106A,106B,106Cから出力される干渉信号は、下記の式(13)で表される。
【0045】
ただし、サンプル番号hにおける位相差は、それぞれ次の1次近似で表現できると考えることができる。
なお、h0は観測時間の中心時刻に相当するパルス番号であり、下記の式(15)で定義される。
【0046】
電力プロフィール算出部107A〜107Cは、信号成分干渉部106A〜106Cから干渉信号を受けると、その干渉信号に対する高速フーリエ変換処理を実施することで、電力プロフィールを算出する
式(13)で表される干渉信号をフーリエ変換して得られる電力プロフィールR01(ω),R02(ω),R11(ω)は、下記の式(16)で表される。
【0047】
【0048】
ピーク位置探索部108A〜108Cは、電力プロフィール算出部107A〜107Cが電力プロフィールR01(ω),R02(ω),R11(ω)を算出すると、その電力プロフィールR01(ω),R02(ω),R11(ω)のピーク位置を探索する。
位相差変化率算出部109A〜109Cは、ピーク位置探索部108A〜108Cが電力プロフィールR01(ω),R02(ω),R11(ω)のピーク位置を探索すると、そのピーク位置から位相差の変化率φ01ドット,φ02ドット,φ11ドットを算出する。
なお、電力プロフィールR01(ω),R02(ω),R11(ω)のピーク位置から位相差の変化率φ01ドット,φ02ドット,φ11ドットを算出できることは、式(16)からも明らかである。
【0049】
目標位置算出部110は、目標検出部104−0〜104−4が目標までの距離r00,r01,r02,r10,r11を算出すると、目標までの距離r00,r01,r02,r10,r11を用いて、移動目標2が存在している位置ptバーの推定値を算出する。
以下、目標位置算出部110による移動目標2が存在している位置ptバーの推定方法を具体的に説明する。
【0050】
送受信局00及び受信局01,02,10,11で観測される目標距離は、それぞれ2r00,r00+r01,r00+r02,r00+r10,r00+r11であるが、これらの目標距離と移動目標2が存在している位置ptバーは、下記の式(17)の関係を満足する。
【0051】
目標位置算出部110は、式(17)の連立方程式を最小二乗法などによって位置ptバーについて解くことにより、移動目標2が存在している位置ptバーの推定値を算出する。
なお、目標位置の推定方法は上記の方式に限るものではなく、例えば、送受信局00で観測された目標距離、方位角の情報から推定するようにしてもよい。
【0052】
速度ベクトル算出部111は、位相差変化率算出部109A〜109Cが位相差の変化率φ01ドット,φ02ドット,φ11ドットを算出すると、その位相差の変化率φ01ドット,φ02ドット,φ11ドットが、移動目標2のクロスレンジ方向の速度に比例するものとして、その位相差の変化率φ01ドット,φ02ドット,φ11ドットと、目標位置算出部110により算出された位置ptバーの推定値とから、移動目標2の速度ベクトルの推定値を算出する。
即ち、速度ベクトル算出部111は、式(7)〜(9)の連立方程式を解くことにより、下記の式(18)に示すように、移動目標2の速度ベクトルの推定値を算出する。
なお、受信局の数を追加して、冗長な観測を実施する場合には、最小二乗法によって解くことができる。
【0053】
[実施の形態1の成立条件]
この発明の実施の形態1のレーダ装置において、上記の処理による速度ベクトルの推定方式が成立するには、位相差の変化率φ01ドット,φ02ドット,φ11ドットの推定値の折り返しに起因する速度のアンビギュイティが発生しない必要がある。
位相差の変化率φ01ドット,φ02ドット,φ11ドットを算出する際に用いている電力プロフィールR01(ω),R02(ω),R11(ω)が、式(16)の離散フーリエ変換で与えられることからも明らかなように、位相差の変化率φ01ドット,φ02ドット,φ11ドットの推定値には、一般には折り返しが発生し、その折り返し周期は、下記の式(19)で表わされる。
【0054】
位相差の変化率φ01ドット,φ02ドット,φ11ドットの折り返し周期に起因するクロスレンジ方向の速度の折り返し周期は、式(7)〜(9)の関係より、下記の式(20)のように算出することができる。
【0055】
式(20)において、dc01,dc02,dc11は基線を視線方向に直交する平面へ投影したベクトルの長さであり、下記の式(21)で定義される。
【0056】
図1に示すような観測ジオメトリの条件下では、ドップラー周波数の折り返し周期で決まるレンジ方向速度の折り返し周期と比べて、位相差の変化率φ01ドット,φ02ドット,φ11ドットの折り返し周期で決まるクロスレンジ方向の速度の折り返し周期(式(20)を参照)は、圧倒的に長い周期を確保することができる。
そのため、実用上は、位相差の変化率φ01ドット,φ02ドット,φ11ドットの折り返し周期で決まるクロスレンジ方向の速度の折り返し周期を、想定される目標速度の最大値よりも大きく設定することが容易である。
【0057】
以上で明らかなように、この実施の形態1によれば、パルスを送信するとともに、目標に反射されて戻ってくる上記パルスを受信する送受信局00と、送受信局00から送信された後、目標に反射されたパルスを受信する受信局01,02,10,11と、送受信局00及び受信局01,02,10,11により受信されたパルスから目標信号を検出する目標信号検出手段と、目標信号検出手段により検出された目標信号のうち、送受信局00及び受信局01,02,10,11の中で基準となる局により受信されたパルスから検出された目標信号と基準局以外の局により受信されたパルスから検出された目標信号との位相差の変化率を算出する位相差変化率算出手段とを設け、速度ベクトル算出手段が、位相差変化率算出手段により算出された位相差の変化率が、目標のクロスレンジ方向の速度に比例するものとして、その位相差の変化率から目標の速度ベクトルの推定値を算出するように構成したので、少ない演算量で、目標の3次元速度ベクトルを推定することができる効果を奏する。
【0058】
即ち、この実施の形態1によれば、マルチスタティック観測で得られる各レーダの受信信号を干渉させて、位相差の変化率を観測することで、クロスレンジ方向の速度を直接推定できることを利用し、クロスレンジ方向の速度を3方向以上計測することによって目標の速度ベクトルを推定するように構成しているので、ドップラー周波数の折り返しの影響を直接被ることが無く、Low PRFのマルチスタティックレーダを用いて、目標速度ベクトルを推定することが可能になる。また、最尤推定法を用いている従来のレーダ装置のように、演算量の大幅な増大を招くことがない特長を有している。
【0059】
実施の形態2.
上述したように、複数の方向から目標信号のドップラー周波数を計測することができれば、移動目標2の速度ベクトルを推定することは可能である。しかし、Low PRFレーダにおいては、ドップラー周波数の折り返し(アンビギュイティ)が発生するために、ドップラー周波数の観測値をそのまま使用することはできない。
上記実施の形態1では、ドップラー周波数の観測値を使用せず、2つの受信局で観測された受信信号の位相差の変化率を観測することで、目標のクロスレンジ方向の速度を推定して、移動目標2の速度ベクトルを推定している。
しかし、上記実施の形態1におけるクロスレンジ方向の速度推定精度は、比較的低い問題がある。ここで言う「比較的低い」とは、ドップラー周波数の折り返しの問題が何らかの方法で解けた場合には、ドップラー周波数の観測によって得られる速度推定精度よりも低いという意味である。
そこで、この実施の形態2では、ドップラー周波数の情報も利用することで、速度推定精度を高めるようにしている。
【0060】
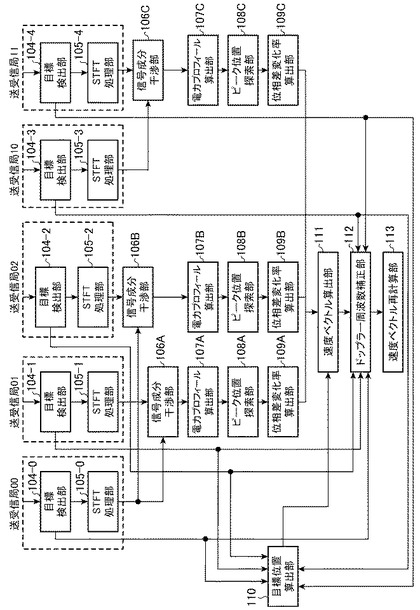
図4はこの発明の実施の形態2によるレーダ装置を示す構成図であり、図において、図2と同一符号は同一または相当部分を示すので説明を省略する。
図4では、送信機100、送受切換器101、送受信アンテナ102−0、受信アンテナ102−1〜102−4、受信機103−0〜103−4の記載を省略している。
ドップラー周波数補正部112は速度ベクトル算出部111により算出された速度ベクトルの推定値を用いて、目標検出部104−0〜104−4により算出された目標信号のドップラー周波数を補正して、そのドップラー周波数に含まれている折り返しの影響を解消する処理を実施する。
速度ベクトル再計算部113はドップラー周波数補正部112により補正されたドップラー周波数を用いて、移動目標2の速度ベクトルの推定値を再計算する。
なお、ドップラー周波数補正部112及び速度ベクトル再計算部113から速度ベクトル再計算手段が構成されている。
【0061】
図4の例では、レーダ装置の構成要素である送信機100、送受切換器101、送受信アンテナ102−0、受信アンテナ102−1〜102−4、受信機103−0〜103−4、目標検出部104−0〜104−4、STFT処理部105−0〜105−4、信号成分干渉部106A〜106C、電力プロフィール算出部107A〜107C、ピーク位置探索部108A〜108C、位相差変化率算出部109A〜109C、目標位置算出部110、速度ベクトル算出部111、ドップラー周波数補正部112及び速度ベクトル再計算部113のそれぞれが専用のハードウェア(例えば、CPUを実装している半導体集積回路、あるいは、ワンチップマイコンなど)で構成されているものを想定しているが、レーダ装置の全部又は一部がコンピュータで構成されていてもよい。
例えば、送信機100、送受切換器101、送受信アンテナ102−0、受信アンテナ102−1〜102−4及び受信機103−0〜103−4を除く構成要素をコンピュータで構成する場合、目標検出部104−0〜104−4、STFT処理部105−0〜105−4、信号成分干渉部106A〜106C、電力プロフィール算出部107A〜107C、ピーク位置探索部108A〜108C、位相差変化率算出部109A〜109C、目標位置算出部110、速度ベクトル算出部111、ドップラー周波数補正部112及び速度ベクトル再計算部113の処理内容を記述しているプログラムをコンピュータのメモリに格納し、当該コンピュータのCPUが当該メモリに格納されているプログラムを実行するようにすればよい。
【0062】
次に動作について説明する。
ドップラー周波数補正部112及び速度ベクトル再計算部113を実装している点以外は、上記実施の形態1と同様であるため、ドップラー周波数補正部112及び速度ベクトル再計算部113の処理内容だけを説明する。
【0063】
ドップラー周波数補正部112は、速度ベクトル算出部111が速度ベクトルの推定値を算出すると、その速度ベクトルの推定値を用いて、目標検出部104−0〜104−4により算出された目標信号のドップラー周波数を補正して、そのドップラー周波数に含まれている折り返しの影響を解消する。
具体的には、以下のようにして、目標信号のドップラー周波数を補正する。
【0064】
まず、各受信局で観測される目標信号のドップラー周波数fdバーの真値は、下記の式(22)で表される。
【0065】
しかし、実際に観測されるのは、PRFで決まる折り返し後のドップラー周波数fdバーチルダである。
目標検出部104−0〜104−4により算出されるドップラー周波数は、PRFで決まる折り返し後のドップラー周波数fdバーチルダである。
一方、速度ベクトル算出部111により算出された速度ベクトルの推定値(式(18)を参照)を用いると、下記の式(23)に示すように、ドップラー周波数の大まかな推定値が得られる。
【0066】
そこで、ドップラー周波数補正部112は、式(23)によって、速度ベクトル算出部111により算出された速度ベクトルの推定値(式(18)を参照)を用いて、折り返しの影響の無いドップラー周波数の大まかな推定値を算出する。
【0067】
次に、ドップラー周波数補正部112は、下記の式(24)に示すように、ドップラー周波数の大まかな推定値(式(23)を参照)を用いて、その推定値に含まれているドップラー周波数の折り返しを補正する。
ここで、[x]はxに最も近い整数値を表す数学記号である。
【0068】
速度ベクトル再計算部113は、ドップラー周波数補正部112が目標検出部104−0〜104−4により算出された目標信号のドップラー周波数を補正すると、下記の式(25)に示すように、補正後のドップラー周波数(式(24)を参照)を用いて、移動目標2の速度ベクトルの推定値を再計算する。
【0069】
[実施の形態2の成立条件]
この発明の実施の形態2のレーダ装置において、ドップラー周波数の折り返しが解消されるためには、式(23)によるドップラー周波数の推定誤差が、PRFよりも十分に小さい必要がある。
したがって、観測ジオメトリを設定した後に、移動目標2の距離や目標速度などについて、上記の条件が成立する範囲の確認が必要である。
【0070】
以上で明らかなように、この実施の形態2によれば、ドップラー周波数補正部112が、速度ベクトル算出部111により算出された速度ベクトルの推定値を用いて、目標検出部104−0〜104−4により算出された目標信号のドップラー周波数を補正して、そのドップラー周波数に含まれている折り返しの影響を解消し、速度ベクトル再計算部113が、ドップラー周波数補正部112により補正されたドップラー周波数を用いて、移動目標2の速度ベクトルの推定値を再計算するように構成したので、上記実施の形態1のレーダ装置よりも速度ベクトルの推定精度を高めることができる効果を奏する。
【0071】
なお、本願発明はその発明の範囲内において、各実施の形態の自由な組み合わせ、あるいは各実施の形態の任意の構成要素の変形、もしくは各実施の形態において任意の構成要素の省略が可能である。
【符号の説明】
【0072】
0,1 レーダサイト、00 送受信局、01,02,10,11 受信局、2 移動目標、100 送信機、101 送受切換器、102−0 送受信アンテナ、102−1〜102−4 受信アンテナ、103−0〜103−4 受信機、104−0〜104−4 目標検出部(目標信号検出手段)、105−0〜105−4 STFT処理部(目標信号検出手段)、106A〜106C 信号成分干渉部(位相差変化率算出手段)、107A〜107C 電力プロフィール算出部(位相差変化率算出手段)、108A〜108C ピーク位置探索部(位相差変化率算出手段)、109A〜109C 位相差変化率算出部(位相差変化率算出手段)、110 目標位置算出部(速度ベクトル算出手段)、111 速度ベクトル算出部(速度ベクトル算出手段)、112 ドップラー周波数補正部(速度ベクトル再計算手段)、113 速度ベクトル再計算部(速度ベクトル再計算手段)、121 レンジ圧縮処理後の受信信号、122 目標信号が検出されたレンジセルの信号の集合、123 目標信号のドップラー周波数に対応するドップラーセルの信号の集合。
【技術分野】
【0001】
この発明は、マルチスタティック観測により目標の速度ベクトルを推定するレーダ装置に関するものである。
【背景技術】
【0002】
パルスを送信する1つ以上の送信局と、パルスを受信する3つ以上の受信局とから構成されているマルチスタティックレーダを用いることで、複数の受信局により受信されたパルスから検出される目標信号のドップラー周波数から、目標の3次元速度ベクトルを推定することができることは自明であり、従来から知られている(例えば、特許文献1を参照)。
しかし、Low PRF(Pulse Repetition Frequency) レーダにおいては、ドップラー周波数の折り返し(アンビギュイティ)が発生するため、ドップラー周波数の観測値を用いて、高速移動目標の速度を正確に推定することは困難である。
【0003】
そこで、以下の非特許文献1,2では、高速移動目標の速度を正確に推定するために、最尤推定のアプローチで、目標の速度ベクトルを推定する方式を提案している。
ただし、最尤推定のアプローチでは、演算量の増大が避けられない問題がある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平9−292463号公報(段落番号[0021])
【非特許文献】
【0005】
【非特許文献1】E. Insanic,P. Siqueira,“Velocity unfolding in networked radar system,”IEEE International Geoscience and Remote Sensing Symposium,2008. (IGARSS 2008),pp.III-1103 − III-1106
【非特許文献2】E. Insanic,P. Siqueira,“Use of vector velocity estimate accuracy for improved resource allocation in a network of Doppler radars,”IEEE International Geoscience and Remote Sensing Symposium,2008. (IGARSS 2008),pp.III-1123 − III-1126
【発明の概要】
【発明が解決しようとする課題】
【0006】
従来のレーダ装置は以上のように構成されているので、Low PRFモードで運用されるマルチスタティックレーダを用いて、目標の3次元速度ベクトルを推定する場合、ドップラー周波数の折り返し(アンビギュイティ)が発生しているため、高速移動目標の速度を正確に推定することが困難である課題があった。
最尤推定のアプローチで、目標の速度ベクトルを推定すれば、高速移動目標の速度を正確に推定することが可能であるが、演算量が増大してしまう課題があった。
【0007】
この発明は上記のような課題を解決するためになされたもので、少ない演算量で、目標の3次元速度ベクトルを推定することができるレーダ装置を得ることを目的とする。
【課題を解決するための手段】
【0008】
この発明に係るレーダ装置は、パルスを送信するとともに、目標に反射されて戻ってくる上記パルスを受信する送受信局と、送受信局から送信された後、目標に反射されたパルスを受信する複数の受信局と、送受信局により受信されたパルスから目標信号を検出するとともに、受信局により受信されたパルスから目標信号を検出する目標信号検出手段と、目標信号検出手段により検出された目標信号のうち、送受信局及び受信局の中で基準となる局により受信されたパルスから検出された目標信号と基準局以外の局により受信されたパルスから検出された目標信号との位相差の変化率を算出する位相差変化率算出手段とを設け、速度ベクトル算出手段が、位相差変化率算出手段により算出された位相差の変化率が、目標のクロスレンジ方向の速度に比例するものとして、その位相差の変化率から目標の速度ベクトルの推定値を算出するようにしたものである。
【発明の効果】
【0009】
この発明によれば、パルスを送信するとともに、目標に反射されて戻ってくる上記パルスを受信する送受信局と、送受信局から送信された後、目標に反射されたパルスを受信する複数の受信局と、送受信局により受信されたパルスから目標信号を検出するとともに、受信局により受信されたパルスから目標信号を検出する目標信号検出手段と、目標信号検出手段により検出された目標信号のうち、送受信局及び受信局の中で基準となる局により受信されたパルスから検出された目標信号と基準局以外の局により受信されたパルスから検出された目標信号との位相差の変化率を算出する位相差変化率算出手段とを設け、速度ベクトル算出手段が、位相差変化率算出手段により算出された位相差の変化率が、目標のクロスレンジ方向の速度に比例するものとして、その位相差の変化率から目標の速度ベクトルの推定値を算出するように構成したので、少ない演算量で、目標の3次元速度ベクトルを推定することができる効果がある。
【図面の簡単な説明】
【0010】
【図1】この発明の実施の形態1によるレーダ装置による観測のジオメトリを示す説明図である。
【図2】この発明の実施の形態1によるレーダ装置を示す構成図である。
【図3】STFT処理部105−0〜105−4の処理内容を示す説明図である。
【図4】この発明の実施の形態2によるレーダ装置を示す構成図である。
【発明を実施するための形態】
【0011】
実施の形態1.
図1はこの発明の実施の形態1によるレーダ装置による観測のジオメトリを示す説明図である。
送受信局00はパルスを送信するとともに、観測対象の移動目標2に反射されて戻ってくる上記パルスを受信し、受信局01,02,10,11は送受信局00から送信された後、移動目標2に反射されたパルスを受信する。
送受信局00と受信局01,02からレーダサイト0が構成されており、受信局10,11からレーダサイト1が構成されている。
【0012】
図1では、Oを原点とする直交座標系のx,y,z座標が定義されている。
x,y,z座標の軸の向きは任意であるが、例えば、x,y平面が水平面を表し、zが鉛直方向上向きを表すと考えてよい。
ここで、p00バー(明細書では、電子出願の関係上、文字の上に付記されている“−”を表記することができないので、p00バーのように表記する)は送受信局00の位置を表す位置ベクトルである。
図1の例では、p00バーを原点Oの位置に合わせているが、p00バーは任意の位置で構わない。
【0013】
p01バーは受信局01の位置を表す位置ベクトル、p02バーは受信局02の位置を表す位置ベクトル、p10バーは受信局10の位置を表す位置ベクトル、p11バーは受信局11の位置を表す位置ベクトルである。
また、ptバーは移動目標2の位置を表す位置ベクトルであり、ptバードット(明細書では、電子出願の関係上、文字の上に付記されている“・”を表記することができないので、p00バードットのように表記する)は移動目標2の速度を表す速度ベクトルである。
【0014】
r00ハット(明細書では、電子出願の関係上、文字の上に付記されている“^”を表記することができないので、r00ハットのように表記する)は送受信局00から移動目標2に向かう向きを表す単位ベクトル、r01ハットは受信局01から移動目標2に向かう向きを表す単位ベクトル、r02ハットは受信局02から移動目標2に向かう向きを表す単位ベクトル、r10ハットは受信局10から移動目標2に向かう向きを表す単位ベクトル、r11ハットは受信局11から移動目標2に向かう向きを表す単位ベクトルである。
【0015】
d01バーはレーダサイト0において、送受信局00を基準にして、送受信局00から受信局01を結ぶベクトル(以下、「基線ベクトル」と称する)であり、d02バーはレーダサイト0において、送受信局00を基準にして、送受信局00から受信局02を結ぶ基線ベクトルである。
d11バーはレーダサイト1において、受信局10を基準にして、受信局10から受信局11を結ぶ基線ベクトルである。
基線ベクトルd01バー,d02バー,d11バーは、下記の式(1)の関係を満たしている。
【0016】
本明細書では、文字の上に“−”が付記されている変数は空間内のベクトルを表し、文字の上に“・”が付記されている変数は、当該変数の時間微分を表している。
また、文字の上に二重のバーである“=”が付記されている変数は行列を表し、文字の上に“^”が付記されている変数は長さが1の単位ベクトルを表している。
【0017】
ここで、移動目標2から送受信局00及び受信局01,受信局02,受信局10,受信局11までの距離r00,r01,r02,r10,r11を下記の式(2)のように定義する。
【0018】
以下、移動目標2から送受信局00及び受信局01,受信局02,受信局10,受信局11までの距離r00,r01,r02,r10,r11が、基線ベクトルd01バー,d02バー,d11バーの長さに対して、十分に長いものとする。
即ち、下記の次(3)の関係を満たしているものとする。
【0019】
以上で説明した図1のジオメトリにおいて、本質的に重要な点は、3つの基線ベクトルd01バー,d02バー,d11バーと、各レーダサイトの基準局から移動目標2に向かう単位ベクトルr00ハット,r10ハットとの配置関係であり、これらのベクトルは、以下の関係を満たしている必要がある。
【0020】
図1の例では、観測対象領域内に移動目標2が1つだけ存在しており、この実施の形態1では、移動目標2が1つである例を説明するが、移動目標2が複数存在する場合、後述する目標の検出処理を実施した後に、各受信局で検出された目標信号の対応付け処理が必要になるが、適切な対応付けが行われた後の処理は、移動目標2が1つである場合と同様である。
【0021】
ここで、実施の形態1によるレーダ装置の動作を具体的に説明する前に、図1のジオメトリによって観測される信号について説明する。
送受信局00から送信されたのち、移動目標2によって散乱されたパルス信号は、送受信局00及び受信局01,受信局02,受信局10,受信局11により受信される。
送受信局00及び受信局01,受信局02,受信局10,受信局11の受信信号から検出される目標信号のピーク複素振幅を、それぞれs00,s01,s02,s10,s11とすると、各レーダサイトの基準局の受信信号に対する他の受信局の受信信号の位相差φ01,φ02,φ11は、下記の式(4)〜(6)の関係を満足する。
この実施の形態1では、レーダサイト0の基準局を送受信局00、レーダサイト1の基準局を受信局10としている。
【0022】
【0023】
式(4)〜(6)は、アレイアンテナを用いて、遠方からの到来波を受信する際に、その到来角度によって決まるアレイ素子間の位相差の式に他ならない。
移動目標2の移動に伴って、移動目標2の位置ベクトルptバーが変化するため、受信信号の位相差φ01,φ02,φ11は時変であるが、短時間の間では、その変化はほぼ線形とみなすことができるため、その位相差φ01,φ02,φ11の変化率φ01ドット,φ02ドット,φ11ドットは、下記の式(7)〜(9)で表される。
【0024】
【0025】
ただし、式(7)〜(9)の導出には、下記の式(10)に示す関係及び近似を用いている。
【0026】
なお、式(7)〜(9)のAは、レンジ方向r00ハットに直交する平面への射影行列であることから、位相差φ01,φ02,φ11の変化率φ01ドット,φ02ドット,φ11ドットは、目標速度のクロスレンジ方向の速度に比例することが分かる。
また、単位ベクトルr00ハット,r10ハットと、基線ベクトルd01バー,d02バー,d11バーとが、上述した関係を満たす場合、式(7)〜(9)の連立方程式を解くことにより、移動目標2の速度ベクトルptバードットを推定できることが分かる。
【0027】
図2はこの発明の実施の形態1によるレーダ装置を示す構成図である。
図2において、送信機100は送受信局00内に搭載されており、tpriの繰り返し周期(PRI:Pulse Repetition Interval)で、Nh個のパルスを出力する処理を実施する。
送受切換器101は送信機100から出力されたパルスを送受信アンテナ102−0に出力する一方、送受信アンテナ102−0の受信信号であるパルスを受信機103−0に出力する処理を実施する。
【0028】
送受信局00内の送受信アンテナ102−0は送受切換器101から出力されたパルスを空間に放射する一方、観測対象の移動目標2によって散乱されて戻ってきたパルスを受信する。
受信局01,02,10,11内の受信アンテナ102−1〜102−4は送受信局00内の送受信アンテナ102−0から空間に放射された後、移動目標2によって散乱されたパルスを受信する。
受信機103−0〜103−4は送受信アンテナ102−0,受信アンテナ102−1〜102−4の受信信号に対して、位相検波処理とA/D変換処理を実施することで、その受信信号の振幅と位相を示すディジタル受信信号を目標検出部104−0〜104−4に出力する処理を実施する。
【0029】
目標検出部104−0〜104−4は受信機103−0〜103−4から出力されたディジタル受信信号に対するCFAR(Constant False Alarm Rate)などの目標検出処理を実施する。
即ち、目標検出部104−0〜104−4は受信機103−0〜103−4から出力されたディジタル受信信号から目標信号が存在しているレンジセルを検出することで、送受信局00及び受信局01,02,10,11から移動目標2までの距離r00,r01,r02,r10,r11と、目標信号のドップラー周波数を算出する処理を実施する。
信号成分抽出部であるSTFT処理部105−0〜105−4は目標検出部104−0〜104−4により検出されたレンジセルの信号と目標検出部104−0〜104−4により算出された目標信号のドップラー周波数を用いて、目標信号のドップラー周波数に対応する信号成分を抽出する処理を実施する。
なお、目標検出部104−0〜104−4及びSTFT処理部105−0〜105−4から目標信号検出手段が構成されている。
図2では、目標検出部104−0〜104−4及びSTFT処理部105−0〜105−4が、送受信局00,受信局01,02,10,11の内部に実装されている例を示しているが、送受信局00,受信局01,02,10,11の外部に実装されていてもよい。
【0030】
信号成分干渉部106Aはレーダサイト0の基準局である送受信局00内のSTFT処理部105−0から出力されたドップラー周波数に対応する信号成分と、基準局以外の局である受信局01内のSTFT処理部105−1から出力されたドップラー周波数に対応する信号成分とを干渉させて、その干渉結果を示す干渉信号を電力プロフィール算出部107Aに出力する処理を実施する。
信号成分干渉部106Bはレーダサイト0の基準局である送受信局00内のSTFT処理部105−0から出力されたドップラー周波数に対応する信号成分と、基準局以外の局である受信局02内のSTFT処理部105−2から出力されたドップラー周波数に対応する信号成分とを干渉させて、その干渉結果を示す干渉信号を電力プロフィール算出部107Bに出力する処理を実施する。
【0031】
信号成分干渉部106Cはレーダサイト1の基準局である送受信局10内のSTFT処理部105−3から出力されたドップラー周波数に対応する信号成分と、基準局以外の局である受信局11内のSTFT処理部105−4から出力されたドップラー周波数に対応する信号成分とを干渉させて、その干渉結果を示す干渉信号を電力プロフィール算出部107Cに出力する処理を実施する。
電力プロフィール算出部107A〜107Cは信号成分干渉部106A〜106Cから出力された干渉信号に対する高速フーリエ変換処理を実施することで、電力プロフィールを算出する処理を実施する。
【0032】
ピーク位置探索部108A〜108Cは電力プロフィール算出部107A〜107Cにより算出された電力プロフィールのピーク位置を探索する処理を実施する。
位相差変化率算出部109A〜109Cはピーク位置探索部108A〜108Cにより探索されたピーク位置から位相差の変化率φ01ドット,φ02ドット,φ11ドットを算出する処理を実施する。
なお、信号成分干渉部106A〜106C、電力プロフィール算出部107A〜107C、ピーク位置探索部108A〜108C及び位相差変化率算出部109A〜109Cから位相差変化率算出手段が構成されている。
【0033】
目標位置算出部110は目標検出部104−0〜104−4により算出された目標までの距離r00,r01,r02,r10,r11を用いて、移動目標2が存在している位置ptバーの推定値を算出する処理を実施する。
速度ベクトル算出部111は位相差変化率算出部109A〜109Cにより算出された位相差の変化率φ01ドット,φ02ドット,φ11ドットが、移動目標2のクロスレンジ方向の速度に比例するものとして、その位相差の変化率φ01ドット,φ02ドット,φ11ドットと目標位置算出部110により算出された位置ptバーの推定値から移動目標の速度ベクトルの推定値を算出する処理を実施する。
なお、目標位置算出部110及び速度ベクトル算出部111から速度ベクトル算出手段が構成されている。
【0034】
図2の例では、レーダ装置の構成要素である送信機100、送受切換器101、送受信アンテナ102−0、受信アンテナ102−1〜102−4、受信機103−0〜103−4、目標検出部104−0〜104−4、STFT処理部105−0〜105−4、信号成分干渉部106A〜106C、電力プロフィール算出部107A〜107C、ピーク位置探索部108A〜108C、位相差変化率算出部109A〜109C、目標位置算出部110及び速度ベクトル算出部111のそれぞれが専用のハードウェア(例えば、CPUを実装している半導体集積回路、あるいは、ワンチップマイコンなど)で構成されているものを想定しているが、レーダ装置の全部又は一部がコンピュータで構成されていてもよい。
例えば、送信機100、送受切換器101、送受信アンテナ102−0、受信アンテナ102−1〜102−4及び受信機103−0〜103−4を除く構成要素をコンピュータで構成する場合、目標検出部104−0〜104−4、STFT処理部105−0〜105−4、信号成分干渉部106A〜106C、電力プロフィール算出部107A〜107C、ピーク位置探索部108A〜108C、位相差変化率算出部109A〜109C、目標位置算出部110及び速度ベクトル算出部111の処理内容を記述しているプログラムをコンピュータのメモリに格納し、当該コンピュータのCPUが当該メモリに格納されているプログラムを実行するようにすればよい。
【0035】
次に動作について説明する。
まず、送受信局00内の送信機100が、繰り返し周期tpriで、Nh個のパルスを出力する。
送受信局00内の送受切換器101は、送信機100からパルスを受けると、そのパルスを送受信アンテナ102−0に出力する。
これにより、送受信局00内の送受信アンテナ102−0からパルスが空間に放射される。
【0036】
その後、送受信局00内の送受信アンテナ102−0は、観測対象の移動目標2によって散乱されて戻ってきたNh個のパルスを受信する。
受信局01,02,10,11内の受信アンテナ102−1〜102−4は、送受信局00内の送受信アンテナ102−0から空間に放射された後、移動目標2によって散乱されたNh個のパルスを受信する。
受信機103−0〜103−4は、送受信アンテナ102−0,受信アンテナ102−1〜102−4の受信信号に対して、位相検波処理とA/D変換処理を実施することで、その受信信号の振幅と位相を検波し、その受信信号の振幅と位相を示すディジタル受信信号を目標検出部104−0〜104−4に出力する。
【0037】
目標検出部104−0〜104−4は、受信機103−0〜103−4からディジタル受信信号を受けると、そのディジタル受信信号に対するCFAR(Constant False Alarm Rate)などの目標検出処理を実施する。
ただし、低SNR環境下では、例えば、一旦、Nh点のフーリエ変換によるコヒーレント積分を実施することで、目標信号が存在しているレンジセルを特定する必要があるため、目標検出部104−0〜104−4は、ディジタル受信信号に対するフーリエ変換によるコヒーレント積分を実施して、目標信号が存在しているレンジセルを特定することで、送受信局00及び受信局01,02,10,11から移動目標2までの距離r00,r01,r02,r10,r11と、目標信号のドップラー周波数を算出する。
【0038】
なお、目標検出部104−0〜104−4により算出された目標信号のドップラー周波数は、STFT処理部105−0〜105−4に与えられるが、このドップラー周波数には、一般に折り返しが含まれているため、このドップラー周波数から、アンビギュイティなく移動目標2の速度に変換することはできない。
ただし、後述するSTFT処理部105−0〜105−4における信号成分の抽出処理では、折り返しが含まれているドップラー周波数でも構わない。
【0039】
STFT処理部105−0〜105−4は、目標検出部104−0〜104−4が目標信号のドップラー周波数を算出すると、目標信号が存在しているレンジセルの信号と目標信号のドップラー周波数を用いて、目標信号のドップラー周波数に対応する信号成分を抽出する。
ここで、図3はSTFT処理部105−0〜105−4の処理内容を示す説明図である。
図3において、121は受信機103−0〜103−4から出力されたレンジ圧縮処理後の受信信号を表しており、レンジセル数M、パルス数Nhの信号である。
122は目標検出部104−0〜104−4により目標信号が検出されたレンジセルの信号の集合である。
123は目標信号のドップラー周波数に対応するドップラーセルの信号の集合である。
【0040】
以下、図3を参照しながら、STFT処理部105−0〜105−4の処理内容を具体的に説明する。
STFT処理部105−0〜105−4は、目標検出部104−0〜104−4により目標信号が検出されたレンジセルの信号の集合122について、Nd点の短時間フーリエ変換処理(STFT:Short Time Fourier Transform)を実施する。
図3に示すように、短時間フーリエ変換処理においては、Nh個のサンプルの中から連続するNd個のサンプルを取り出して、FFTを適用する。
さらに、図3に示すように、取り出すサンプルのセットを少しずつずらしながら、FFTを適用する。
図3では、取り出すサンプルを1サンプルずつずらす例を示しており、この場合、取り出されるサンプルのセットの総数は、Nh−Nd+1になる。ただし、ずらし量は1サンプル以上でも構わない。
【0041】
STFT処理部105−0〜105−4は、レンジセルの信号の集合122について、Nd点の短時間フーリエ変換処理を実施すると、図3に示すように、その変換結果から目標信号のドップラー周波数に対応する信号123(目標信号のドップラー周波数に対応する信号成分)を取り出して出力する。
送受信局00及び受信局01,02,10,11において取り出される信号s00(h),s01(h),s02(h),s10(h),s11(h)は、下記の式(11)で表される。
【0042】
【0043】
信号成分干渉部106Aは、レーダサイト0の基準局である送受信局00内のSTFT処理部105−0から出力されたドップラー周波数に対応する信号s00(h)と、基準局以外の局である受信局01内のSTFT処理部105−1から出力されたドップラー周波数に対応する信号s01(h)とを干渉させて、その干渉結果を示す干渉信号を電力プロフィール算出部107Aに出力する。
信号成分干渉部106Bは、レーダサイト0の基準局である送受信局00内のSTFT処理部105−0から出力されたドップラー周波数に対応する信号s00(h)と、基準局以外の局である受信局02内のSTFT処理部105−2から出力されたドップラー周波数に対応する信号s02(h)とを干渉させて、その干渉結果を示す干渉信号を電力プロフィール算出部107Bに出力する。
【0044】
信号成分干渉部106Cは、レーダサイト1の基準局である送受信局10内のSTFT処理部105−3から出力されたドップラー周波数に対応する信号s10(h)と、基準局以外の局である受信局11内のSTFT処理部105−4から出力されたドップラー周波数に対応する信号s11(h)とを干渉させて、その干渉結果を示す干渉信号を電力プロフィール算出部107Cに出力する。
信号成分干渉部106A,106B,106Cから出力される干渉信号は、下記の式(13)で表される。
【0045】
ただし、サンプル番号hにおける位相差は、それぞれ次の1次近似で表現できると考えることができる。
なお、h0は観測時間の中心時刻に相当するパルス番号であり、下記の式(15)で定義される。
【0046】
電力プロフィール算出部107A〜107Cは、信号成分干渉部106A〜106Cから干渉信号を受けると、その干渉信号に対する高速フーリエ変換処理を実施することで、電力プロフィールを算出する
式(13)で表される干渉信号をフーリエ変換して得られる電力プロフィールR01(ω),R02(ω),R11(ω)は、下記の式(16)で表される。
【0047】
【0048】
ピーク位置探索部108A〜108Cは、電力プロフィール算出部107A〜107Cが電力プロフィールR01(ω),R02(ω),R11(ω)を算出すると、その電力プロフィールR01(ω),R02(ω),R11(ω)のピーク位置を探索する。
位相差変化率算出部109A〜109Cは、ピーク位置探索部108A〜108Cが電力プロフィールR01(ω),R02(ω),R11(ω)のピーク位置を探索すると、そのピーク位置から位相差の変化率φ01ドット,φ02ドット,φ11ドットを算出する。
なお、電力プロフィールR01(ω),R02(ω),R11(ω)のピーク位置から位相差の変化率φ01ドット,φ02ドット,φ11ドットを算出できることは、式(16)からも明らかである。
【0049】
目標位置算出部110は、目標検出部104−0〜104−4が目標までの距離r00,r01,r02,r10,r11を算出すると、目標までの距離r00,r01,r02,r10,r11を用いて、移動目標2が存在している位置ptバーの推定値を算出する。
以下、目標位置算出部110による移動目標2が存在している位置ptバーの推定方法を具体的に説明する。
【0050】
送受信局00及び受信局01,02,10,11で観測される目標距離は、それぞれ2r00,r00+r01,r00+r02,r00+r10,r00+r11であるが、これらの目標距離と移動目標2が存在している位置ptバーは、下記の式(17)の関係を満足する。
【0051】
目標位置算出部110は、式(17)の連立方程式を最小二乗法などによって位置ptバーについて解くことにより、移動目標2が存在している位置ptバーの推定値を算出する。
なお、目標位置の推定方法は上記の方式に限るものではなく、例えば、送受信局00で観測された目標距離、方位角の情報から推定するようにしてもよい。
【0052】
速度ベクトル算出部111は、位相差変化率算出部109A〜109Cが位相差の変化率φ01ドット,φ02ドット,φ11ドットを算出すると、その位相差の変化率φ01ドット,φ02ドット,φ11ドットが、移動目標2のクロスレンジ方向の速度に比例するものとして、その位相差の変化率φ01ドット,φ02ドット,φ11ドットと、目標位置算出部110により算出された位置ptバーの推定値とから、移動目標2の速度ベクトルの推定値を算出する。
即ち、速度ベクトル算出部111は、式(7)〜(9)の連立方程式を解くことにより、下記の式(18)に示すように、移動目標2の速度ベクトルの推定値を算出する。
なお、受信局の数を追加して、冗長な観測を実施する場合には、最小二乗法によって解くことができる。
【0053】
[実施の形態1の成立条件]
この発明の実施の形態1のレーダ装置において、上記の処理による速度ベクトルの推定方式が成立するには、位相差の変化率φ01ドット,φ02ドット,φ11ドットの推定値の折り返しに起因する速度のアンビギュイティが発生しない必要がある。
位相差の変化率φ01ドット,φ02ドット,φ11ドットを算出する際に用いている電力プロフィールR01(ω),R02(ω),R11(ω)が、式(16)の離散フーリエ変換で与えられることからも明らかなように、位相差の変化率φ01ドット,φ02ドット,φ11ドットの推定値には、一般には折り返しが発生し、その折り返し周期は、下記の式(19)で表わされる。
【0054】
位相差の変化率φ01ドット,φ02ドット,φ11ドットの折り返し周期に起因するクロスレンジ方向の速度の折り返し周期は、式(7)〜(9)の関係より、下記の式(20)のように算出することができる。
【0055】
式(20)において、dc01,dc02,dc11は基線を視線方向に直交する平面へ投影したベクトルの長さであり、下記の式(21)で定義される。
【0056】
図1に示すような観測ジオメトリの条件下では、ドップラー周波数の折り返し周期で決まるレンジ方向速度の折り返し周期と比べて、位相差の変化率φ01ドット,φ02ドット,φ11ドットの折り返し周期で決まるクロスレンジ方向の速度の折り返し周期(式(20)を参照)は、圧倒的に長い周期を確保することができる。
そのため、実用上は、位相差の変化率φ01ドット,φ02ドット,φ11ドットの折り返し周期で決まるクロスレンジ方向の速度の折り返し周期を、想定される目標速度の最大値よりも大きく設定することが容易である。
【0057】
以上で明らかなように、この実施の形態1によれば、パルスを送信するとともに、目標に反射されて戻ってくる上記パルスを受信する送受信局00と、送受信局00から送信された後、目標に反射されたパルスを受信する受信局01,02,10,11と、送受信局00及び受信局01,02,10,11により受信されたパルスから目標信号を検出する目標信号検出手段と、目標信号検出手段により検出された目標信号のうち、送受信局00及び受信局01,02,10,11の中で基準となる局により受信されたパルスから検出された目標信号と基準局以外の局により受信されたパルスから検出された目標信号との位相差の変化率を算出する位相差変化率算出手段とを設け、速度ベクトル算出手段が、位相差変化率算出手段により算出された位相差の変化率が、目標のクロスレンジ方向の速度に比例するものとして、その位相差の変化率から目標の速度ベクトルの推定値を算出するように構成したので、少ない演算量で、目標の3次元速度ベクトルを推定することができる効果を奏する。
【0058】
即ち、この実施の形態1によれば、マルチスタティック観測で得られる各レーダの受信信号を干渉させて、位相差の変化率を観測することで、クロスレンジ方向の速度を直接推定できることを利用し、クロスレンジ方向の速度を3方向以上計測することによって目標の速度ベクトルを推定するように構成しているので、ドップラー周波数の折り返しの影響を直接被ることが無く、Low PRFのマルチスタティックレーダを用いて、目標速度ベクトルを推定することが可能になる。また、最尤推定法を用いている従来のレーダ装置のように、演算量の大幅な増大を招くことがない特長を有している。
【0059】
実施の形態2.
上述したように、複数の方向から目標信号のドップラー周波数を計測することができれば、移動目標2の速度ベクトルを推定することは可能である。しかし、Low PRFレーダにおいては、ドップラー周波数の折り返し(アンビギュイティ)が発生するために、ドップラー周波数の観測値をそのまま使用することはできない。
上記実施の形態1では、ドップラー周波数の観測値を使用せず、2つの受信局で観測された受信信号の位相差の変化率を観測することで、目標のクロスレンジ方向の速度を推定して、移動目標2の速度ベクトルを推定している。
しかし、上記実施の形態1におけるクロスレンジ方向の速度推定精度は、比較的低い問題がある。ここで言う「比較的低い」とは、ドップラー周波数の折り返しの問題が何らかの方法で解けた場合には、ドップラー周波数の観測によって得られる速度推定精度よりも低いという意味である。
そこで、この実施の形態2では、ドップラー周波数の情報も利用することで、速度推定精度を高めるようにしている。
【0060】
図4はこの発明の実施の形態2によるレーダ装置を示す構成図であり、図において、図2と同一符号は同一または相当部分を示すので説明を省略する。
図4では、送信機100、送受切換器101、送受信アンテナ102−0、受信アンテナ102−1〜102−4、受信機103−0〜103−4の記載を省略している。
ドップラー周波数補正部112は速度ベクトル算出部111により算出された速度ベクトルの推定値を用いて、目標検出部104−0〜104−4により算出された目標信号のドップラー周波数を補正して、そのドップラー周波数に含まれている折り返しの影響を解消する処理を実施する。
速度ベクトル再計算部113はドップラー周波数補正部112により補正されたドップラー周波数を用いて、移動目標2の速度ベクトルの推定値を再計算する。
なお、ドップラー周波数補正部112及び速度ベクトル再計算部113から速度ベクトル再計算手段が構成されている。
【0061】
図4の例では、レーダ装置の構成要素である送信機100、送受切換器101、送受信アンテナ102−0、受信アンテナ102−1〜102−4、受信機103−0〜103−4、目標検出部104−0〜104−4、STFT処理部105−0〜105−4、信号成分干渉部106A〜106C、電力プロフィール算出部107A〜107C、ピーク位置探索部108A〜108C、位相差変化率算出部109A〜109C、目標位置算出部110、速度ベクトル算出部111、ドップラー周波数補正部112及び速度ベクトル再計算部113のそれぞれが専用のハードウェア(例えば、CPUを実装している半導体集積回路、あるいは、ワンチップマイコンなど)で構成されているものを想定しているが、レーダ装置の全部又は一部がコンピュータで構成されていてもよい。
例えば、送信機100、送受切換器101、送受信アンテナ102−0、受信アンテナ102−1〜102−4及び受信機103−0〜103−4を除く構成要素をコンピュータで構成する場合、目標検出部104−0〜104−4、STFT処理部105−0〜105−4、信号成分干渉部106A〜106C、電力プロフィール算出部107A〜107C、ピーク位置探索部108A〜108C、位相差変化率算出部109A〜109C、目標位置算出部110、速度ベクトル算出部111、ドップラー周波数補正部112及び速度ベクトル再計算部113の処理内容を記述しているプログラムをコンピュータのメモリに格納し、当該コンピュータのCPUが当該メモリに格納されているプログラムを実行するようにすればよい。
【0062】
次に動作について説明する。
ドップラー周波数補正部112及び速度ベクトル再計算部113を実装している点以外は、上記実施の形態1と同様であるため、ドップラー周波数補正部112及び速度ベクトル再計算部113の処理内容だけを説明する。
【0063】
ドップラー周波数補正部112は、速度ベクトル算出部111が速度ベクトルの推定値を算出すると、その速度ベクトルの推定値を用いて、目標検出部104−0〜104−4により算出された目標信号のドップラー周波数を補正して、そのドップラー周波数に含まれている折り返しの影響を解消する。
具体的には、以下のようにして、目標信号のドップラー周波数を補正する。
【0064】
まず、各受信局で観測される目標信号のドップラー周波数fdバーの真値は、下記の式(22)で表される。
【0065】
しかし、実際に観測されるのは、PRFで決まる折り返し後のドップラー周波数fdバーチルダである。
目標検出部104−0〜104−4により算出されるドップラー周波数は、PRFで決まる折り返し後のドップラー周波数fdバーチルダである。
一方、速度ベクトル算出部111により算出された速度ベクトルの推定値(式(18)を参照)を用いると、下記の式(23)に示すように、ドップラー周波数の大まかな推定値が得られる。
【0066】
そこで、ドップラー周波数補正部112は、式(23)によって、速度ベクトル算出部111により算出された速度ベクトルの推定値(式(18)を参照)を用いて、折り返しの影響の無いドップラー周波数の大まかな推定値を算出する。
【0067】
次に、ドップラー周波数補正部112は、下記の式(24)に示すように、ドップラー周波数の大まかな推定値(式(23)を参照)を用いて、その推定値に含まれているドップラー周波数の折り返しを補正する。
ここで、[x]はxに最も近い整数値を表す数学記号である。
【0068】
速度ベクトル再計算部113は、ドップラー周波数補正部112が目標検出部104−0〜104−4により算出された目標信号のドップラー周波数を補正すると、下記の式(25)に示すように、補正後のドップラー周波数(式(24)を参照)を用いて、移動目標2の速度ベクトルの推定値を再計算する。
【0069】
[実施の形態2の成立条件]
この発明の実施の形態2のレーダ装置において、ドップラー周波数の折り返しが解消されるためには、式(23)によるドップラー周波数の推定誤差が、PRFよりも十分に小さい必要がある。
したがって、観測ジオメトリを設定した後に、移動目標2の距離や目標速度などについて、上記の条件が成立する範囲の確認が必要である。
【0070】
以上で明らかなように、この実施の形態2によれば、ドップラー周波数補正部112が、速度ベクトル算出部111により算出された速度ベクトルの推定値を用いて、目標検出部104−0〜104−4により算出された目標信号のドップラー周波数を補正して、そのドップラー周波数に含まれている折り返しの影響を解消し、速度ベクトル再計算部113が、ドップラー周波数補正部112により補正されたドップラー周波数を用いて、移動目標2の速度ベクトルの推定値を再計算するように構成したので、上記実施の形態1のレーダ装置よりも速度ベクトルの推定精度を高めることができる効果を奏する。
【0071】
なお、本願発明はその発明の範囲内において、各実施の形態の自由な組み合わせ、あるいは各実施の形態の任意の構成要素の変形、もしくは各実施の形態において任意の構成要素の省略が可能である。
【符号の説明】
【0072】
0,1 レーダサイト、00 送受信局、01,02,10,11 受信局、2 移動目標、100 送信機、101 送受切換器、102−0 送受信アンテナ、102−1〜102−4 受信アンテナ、103−0〜103−4 受信機、104−0〜104−4 目標検出部(目標信号検出手段)、105−0〜105−4 STFT処理部(目標信号検出手段)、106A〜106C 信号成分干渉部(位相差変化率算出手段)、107A〜107C 電力プロフィール算出部(位相差変化率算出手段)、108A〜108C ピーク位置探索部(位相差変化率算出手段)、109A〜109C 位相差変化率算出部(位相差変化率算出手段)、110 目標位置算出部(速度ベクトル算出手段)、111 速度ベクトル算出部(速度ベクトル算出手段)、112 ドップラー周波数補正部(速度ベクトル再計算手段)、113 速度ベクトル再計算部(速度ベクトル再計算手段)、121 レンジ圧縮処理後の受信信号、122 目標信号が検出されたレンジセルの信号の集合、123 目標信号のドップラー周波数に対応するドップラーセルの信号の集合。
【特許請求の範囲】
【請求項1】
パルスを送信するとともに、目標に反射されて戻ってくる上記パルスを受信する送受信局と、上記送受信局から送信された後、上記目標に反射されたパルスを受信する複数の受信局と、上記送受信局により受信されたパルスから目標信号を検出するとともに、上記受信局により受信されたパルスから目標信号を検出する目標信号検出手段と、上記目標信号検出手段により検出された目標信号のうち、上記送受信局及び上記受信局の中で基準となる局により受信されたパルスから検出された目標信号と基準局以外の局により受信されたパルスから検出された目標信号との位相差の変化率を算出する位相差変化率算出手段と、上記位相差変化率算出手段により算出された位相差の変化率が、上記目標のクロスレンジ方向の速度に比例するものとして、上記位相差の変化率から上記目標の速度ベクトルの推定値を算出する速度ベクトル算出手段とを備えたレーダ装置。
【請求項2】
目標信号検出手段は、送受信局及び受信局により受信されたパルスから目標信号が存在しているレンジセルを検出することで、上記送受信局及び上記受信局から上記目標までの距離と上記目標信号のドップラー周波数を算出する目標検出部と、上記目標検出部により検出されたレンジセルの信号と上記目標検出部により算出された目標信号のドップラー周波数を用いて、上記目標信号のドップラー周波数に対応する信号成分を抽出する信号成分抽出部とから構成され、
位相差変化率算出手段は、上記信号成分抽出部により抽出された目標信号のドップラー周波数に対応する信号成分のうち、基準局により受信されたパルスから検出されたドップラー周波数に対応する信号成分と基準局以外の局により受信されたパルスから検出されたドップラー周波数に対応する信号成分とを干渉させて、その干渉結果を示す干渉信号を出力する信号成分干渉部と、上記信号成分干渉部から出力された干渉信号から電力プロフィールを算出する電力プロフィール算出部と、上記電力プロフィール算出部により算出された電力プロフィールのピーク位置を探索するピーク位置探索部と、上記ピーク位置探索部により探索されたピーク位置から位相差の変化率を算出する位相差変化率算出部とから構成され、
速度ベクトル算出手段は、上記目標検出部により算出された目標までの距離を用いて、上記目標が存在している位置の推定値を算出する目標位置算出部と、上記位相差変化率算出部により算出された位相差の変化率が、上記目標のクロスレンジ方向の速度に比例するものとして、上記位相差の変化率と上記目標位置算出部により算出された位置の推定値から上記目標の速度ベクトルの推定値を算出する速度ベクトル算出部とから構成されていることを特徴とする請求項1記載のレーダ装置。
【請求項3】
パルスを送信するとともに、目標に反射されて戻ってくる上記パルスを受信する送受信局と、上記送受信局から送信された後、上記目標に反射されたパルスを受信する複数の受信局と、上記送受信局により受信されたパルスから目標信号を検出して、上記目標信号のドップラー周波数を算出するとともに、上記受信局により受信されたパルスから目標信号を検出して、上記目標信号のドップラー周波数を算出する目標信号検出手段と、上記目標信号検出手段により検出された目標信号のうち、上記送受信局及び上記受信局の中で基準となる局により受信されたパルスから検出された目標信号と基準局以外の局により受信されたパルスから検出された目標信号との位相差の変化率を算出する位相差変化率算出手段と、上記位相差変化率算出手段により算出された位相差の変化率が、上記目標のクロスレンジ方向の速度に比例するものとして、上記位相差の変化率から上記目標の速度ベクトルの推定値を算出する速度ベクトル算出手段と、上記速度ベクトル算出手段により算出された速度ベクトルの推定値を用いて、上記目標信号検出手段により算出された目標信号のドップラー周波数を補正して、上記ドップラー周波数に含まれている折り返しの影響を解消し、補正後のドップラー周波数を用いて、上記目標の速度ベクトルの推定値を再計算する速度ベクトル再計算手段とを備えたレーダ装置。
【請求項4】
目標信号検出手段は、送受信局及び受信局により受信されたパルスから目標信号が存在しているレンジセルを検出することで、上記送受信局及び上記受信局から上記目標までの距離と上記目標信号のドップラー周波数を算出する目標検出部と、上記目標検出部により検出されたレンジセルの信号と上記目標検出部により算出された目標信号のドップラー周波数を用いて、上記目標信号のドップラー周波数に対応する信号成分を抽出する信号成分抽出部とから構成され、
位相差変化率算出手段は、上記信号成分抽出部により抽出された目標信号のドップラー周波数に対応する信号成分のうち、基準局により受信されたパルスから検出されたドップラー周波数に対応する信号成分と基準局以外の局により受信されたパルスから検出されたドップラー周波数に対応する信号成分とを干渉させて、その干渉結果を示す干渉信号を出力する信号成分干渉部と、上記信号成分干渉部から出力された干渉信号から電力プロフィールを算出する電力プロフィール算出部と、上記電力プロフィール算出部により算出された電力プロフィールのピーク位置を探索するピーク位置探索部と、上記ピーク位置探索部により探索されたピーク位置から位相差の変化率を算出する位相差変化率算出部とから構成され、
速度ベクトル算出手段は、上記目標検出部により算出された目標までの距離を用いて、上記目標が存在している位置の推定値を算出する目標位置算出部と、上記位相差変化率算出部により算出された位相差の変化率が、上記目標のクロスレンジ方向の速度に比例するものとして、上記位相差の変化率と上記目標位置算出部により算出された位置の推定値から上記目標の速度ベクトルの推定値を算出する速度ベクトル算出部とから構成され、
速度ベクトル再計算手段は、上記速度ベクトル算出部により算出された速度ベクトルの推定値を用いて、上記目標検出部により算出された目標信号のドップラー周波数を補正して、上記ドップラー周波数に含まれている折り返しの影響を解消するドップラー周波数補正部と、上記ドップラー周波数補正部により補正されたドップラー周波数を用いて、上記目標の速度ベクトルの推定値を再計算する速度ベクトル再計算部とから構成されていることを特徴とする請求項3記載のレーダ装置。
【請求項1】
パルスを送信するとともに、目標に反射されて戻ってくる上記パルスを受信する送受信局と、上記送受信局から送信された後、上記目標に反射されたパルスを受信する複数の受信局と、上記送受信局により受信されたパルスから目標信号を検出するとともに、上記受信局により受信されたパルスから目標信号を検出する目標信号検出手段と、上記目標信号検出手段により検出された目標信号のうち、上記送受信局及び上記受信局の中で基準となる局により受信されたパルスから検出された目標信号と基準局以外の局により受信されたパルスから検出された目標信号との位相差の変化率を算出する位相差変化率算出手段と、上記位相差変化率算出手段により算出された位相差の変化率が、上記目標のクロスレンジ方向の速度に比例するものとして、上記位相差の変化率から上記目標の速度ベクトルの推定値を算出する速度ベクトル算出手段とを備えたレーダ装置。
【請求項2】
目標信号検出手段は、送受信局及び受信局により受信されたパルスから目標信号が存在しているレンジセルを検出することで、上記送受信局及び上記受信局から上記目標までの距離と上記目標信号のドップラー周波数を算出する目標検出部と、上記目標検出部により検出されたレンジセルの信号と上記目標検出部により算出された目標信号のドップラー周波数を用いて、上記目標信号のドップラー周波数に対応する信号成分を抽出する信号成分抽出部とから構成され、
位相差変化率算出手段は、上記信号成分抽出部により抽出された目標信号のドップラー周波数に対応する信号成分のうち、基準局により受信されたパルスから検出されたドップラー周波数に対応する信号成分と基準局以外の局により受信されたパルスから検出されたドップラー周波数に対応する信号成分とを干渉させて、その干渉結果を示す干渉信号を出力する信号成分干渉部と、上記信号成分干渉部から出力された干渉信号から電力プロフィールを算出する電力プロフィール算出部と、上記電力プロフィール算出部により算出された電力プロフィールのピーク位置を探索するピーク位置探索部と、上記ピーク位置探索部により探索されたピーク位置から位相差の変化率を算出する位相差変化率算出部とから構成され、
速度ベクトル算出手段は、上記目標検出部により算出された目標までの距離を用いて、上記目標が存在している位置の推定値を算出する目標位置算出部と、上記位相差変化率算出部により算出された位相差の変化率が、上記目標のクロスレンジ方向の速度に比例するものとして、上記位相差の変化率と上記目標位置算出部により算出された位置の推定値から上記目標の速度ベクトルの推定値を算出する速度ベクトル算出部とから構成されていることを特徴とする請求項1記載のレーダ装置。
【請求項3】
パルスを送信するとともに、目標に反射されて戻ってくる上記パルスを受信する送受信局と、上記送受信局から送信された後、上記目標に反射されたパルスを受信する複数の受信局と、上記送受信局により受信されたパルスから目標信号を検出して、上記目標信号のドップラー周波数を算出するとともに、上記受信局により受信されたパルスから目標信号を検出して、上記目標信号のドップラー周波数を算出する目標信号検出手段と、上記目標信号検出手段により検出された目標信号のうち、上記送受信局及び上記受信局の中で基準となる局により受信されたパルスから検出された目標信号と基準局以外の局により受信されたパルスから検出された目標信号との位相差の変化率を算出する位相差変化率算出手段と、上記位相差変化率算出手段により算出された位相差の変化率が、上記目標のクロスレンジ方向の速度に比例するものとして、上記位相差の変化率から上記目標の速度ベクトルの推定値を算出する速度ベクトル算出手段と、上記速度ベクトル算出手段により算出された速度ベクトルの推定値を用いて、上記目標信号検出手段により算出された目標信号のドップラー周波数を補正して、上記ドップラー周波数に含まれている折り返しの影響を解消し、補正後のドップラー周波数を用いて、上記目標の速度ベクトルの推定値を再計算する速度ベクトル再計算手段とを備えたレーダ装置。
【請求項4】
目標信号検出手段は、送受信局及び受信局により受信されたパルスから目標信号が存在しているレンジセルを検出することで、上記送受信局及び上記受信局から上記目標までの距離と上記目標信号のドップラー周波数を算出する目標検出部と、上記目標検出部により検出されたレンジセルの信号と上記目標検出部により算出された目標信号のドップラー周波数を用いて、上記目標信号のドップラー周波数に対応する信号成分を抽出する信号成分抽出部とから構成され、
位相差変化率算出手段は、上記信号成分抽出部により抽出された目標信号のドップラー周波数に対応する信号成分のうち、基準局により受信されたパルスから検出されたドップラー周波数に対応する信号成分と基準局以外の局により受信されたパルスから検出されたドップラー周波数に対応する信号成分とを干渉させて、その干渉結果を示す干渉信号を出力する信号成分干渉部と、上記信号成分干渉部から出力された干渉信号から電力プロフィールを算出する電力プロフィール算出部と、上記電力プロフィール算出部により算出された電力プロフィールのピーク位置を探索するピーク位置探索部と、上記ピーク位置探索部により探索されたピーク位置から位相差の変化率を算出する位相差変化率算出部とから構成され、
速度ベクトル算出手段は、上記目標検出部により算出された目標までの距離を用いて、上記目標が存在している位置の推定値を算出する目標位置算出部と、上記位相差変化率算出部により算出された位相差の変化率が、上記目標のクロスレンジ方向の速度に比例するものとして、上記位相差の変化率と上記目標位置算出部により算出された位置の推定値から上記目標の速度ベクトルの推定値を算出する速度ベクトル算出部とから構成され、
速度ベクトル再計算手段は、上記速度ベクトル算出部により算出された速度ベクトルの推定値を用いて、上記目標検出部により算出された目標信号のドップラー周波数を補正して、上記ドップラー周波数に含まれている折り返しの影響を解消するドップラー周波数補正部と、上記ドップラー周波数補正部により補正されたドップラー周波数を用いて、上記目標の速度ベクトルの推定値を再計算する速度ベクトル再計算部とから構成されていることを特徴とする請求項3記載のレーダ装置。
【図1】

【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−24775(P2013−24775A)
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願番号】特願2011−161032(P2011−161032)
【出願日】平成23年7月22日(2011.7.22)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願日】平成23年7月22日(2011.7.22)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]