
レーダ装置
【課題】レーダ装置の近傍に配置されたECM装置、通信装置、他のレーダ装置などの干渉信号源が、強い断続的信号を送信する場合であっても、複数目標からの反射信号を欠落せずに受信でき、干渉信号源との干渉を低減する。
【解決手段】干渉信号源の動作を制御する制御ユニット15から出力された制御信号に基づいてレーダ装置は動作する。干渉信号源16が送信停止するタイミング情報を制御ユニット15から受取り、干渉信号が停止する前に探知距離相当の時間長のチャープ変調信号を送信し、干渉信号の停止と同時に短い受信期間内に、探知距離内に位置する複数目標からの反射信号を受信する。目標までの距離情報を送受信の差分周波数により得ているため、必要な受信期間が最大探知距離に依存せず、短期間に受信できる。また干渉信号の存在しない時間のみの受信信号を用いて信号処理するため、干渉信号源との干渉を低減できる。
【解決手段】干渉信号源の動作を制御する制御ユニット15から出力された制御信号に基づいてレーダ装置は動作する。干渉信号源16が送信停止するタイミング情報を制御ユニット15から受取り、干渉信号が停止する前に探知距離相当の時間長のチャープ変調信号を送信し、干渉信号の停止と同時に短い受信期間内に、探知距離内に位置する複数目標からの反射信号を受信する。目標までの距離情報を送受信の差分周波数により得ているため、必要な受信期間が最大探知距離に依存せず、短期間に受信できる。また干渉信号の存在しない時間のみの受信信号を用いて信号処理するため、干渉信号源との干渉を低減できる。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、変調した電波信号を空間に照射して、目標の位置や速度を検出するレーダ装置に関する。特に、近傍に強い干渉信号源が配置されている場合に、この干渉信号源との干渉を回避し、本レーダ装置を有効に動作させる技術に関する。
【背景技術】
【0002】
車両や航空機、艦船等の狭いプラットホームにレーダを搭載する場合、通信装置やECM装置、他のレーダ装置等の電波機器との干渉が問題となる。従来、これらの電波機器間の干渉は、空中線の配置を工夫したり、レーダ同士の場合はレーダ装置ごとにパルスの送信周期を異なるようにする等の対策が採られてきた。例えば後者の例として、特許文献1のような方法がある。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−25944号公報(第1−17頁、第1図)
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示された方法では、車載用レーダ装置ごとにパルス送信間隔(周期)PRIを異なるようにすることにより、干渉の発生頻度を軽減している。また、低価格で簡易な方式であるFMCWレーダや周波CWレーダを採用し、小型化も可能である。しかし、パルスの送信周期を異なるようにしても、レーダ間で非同期の干渉があることは明白であり、探知性能が劣化することは容易に想像できる。また、干渉信号源が通信装置やECM装置等の周期性でない信号を送信する装置である場合、このようなレーダを前提とした干渉対策は実施することができないという問題がある。
【0005】
本発明はこのような課題を解決するためのものであり、近傍に通信装置やECM装置、他のレーダ装置等の強い干渉信号源が配置されている場合であっても、干渉信号源が無い場合と同等のレーダ性能を得ることを目的とする。
【課題を解決するための手段】
【0006】
この発明に係るレーダ装置は、近傍に断続的な干渉信号を送信する干渉信号源が配置され、この干渉信号源の動作を制御する制御ユニットから出力された制御信号に基づいて動作するレーダ装置であって、前記制御信号に従いチャープ変調信号を生成するチャープ変調生成部と、前記制御信号に従い前記チャープ変調信号を送信するタイミングを制御する送信タイミング制御器と、前記チャープ変調信号を放射する送信アンテナと、異なる距離に位置する複数目標からの反射信号を受信する受信アンテナと、前記制御信号に従い受信するタイミングを制御し受信信号を出力する受信タイミング制御器と、前記受信信号に前記チャープ変調信号を混合した送受信信号の差分周波数から各目標の距離を算出する受信信号処理部とを備え、前記送信タイミング制御器は、前記制御ユニットから前記干渉信号の停止タイミング情報を受取り、この停止タイミングより前に予め設定した送信時間長の前記チャープ変調信号を送信し、前記受信タイミング制御器は、前記干渉信号の停止タイミングと同時に、この停止期間内に前記複数目標からの反射信号を受信することを特徴とする。
【発明の効果】
【0007】
本発明によると、目標までの距離情報を送受信の差分周波数から算出するため、必要な受信期間が最大探知距離に依存せず、短期間に探知距離内に存在する複数目標からの反射信号を受信し、距離を算出できる。また、干渉信号の存在しない時間のみの受信信号を用いて信号処理するため、干渉信号の影響を最小限に抑制することができるという効果を奏する。
【図面の簡単な説明】
【0008】
【図1】この発明の実施の形態1に係るレーダ装置の全体構成を表すブロック図である。
【図2】この発明の実施の形態1に係るレーダ装置の制御動作を表すタイムチャートである。
【図3】この発明の実施の形態2に係るレーダ装置の制御動作を表すタイムチャートである。
【図4】従来のパルスレーダ装置に係る制御動作を表すタイムチャートである。
【発明を実施するための形態】
【0009】
実施の形態1.
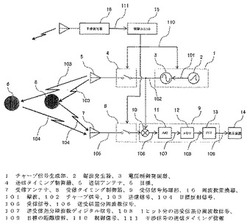
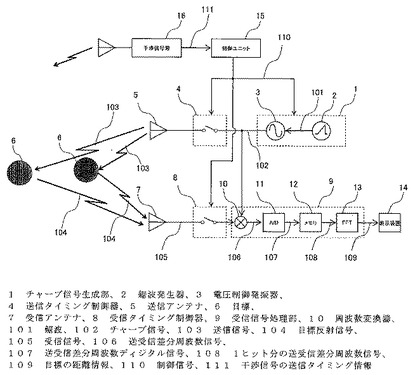
図1には、本発明による実施の形態1に係るレーダ装置の全体構成を表すブロック図を示す。チャープ変調信号生成部1は鋸波発生器2と電圧制御発振器3から構成され、鋸波101を電圧制御発振器3に入力することによりチャープ変調信号102を生成する。生成されたチャープ変調信号102は、送信タイミング制御器4を通して送信アンテナ5から送信信号103として放射される。送信信号103は目標6に反射されて目標反射信号104となり、受信アンテナ7に受信信号105として受信される。一般に受信信号105は距離の異なる複数の目標からの反射された信号104の和となる。
【0010】
受信信号105は受信タイミング制御器8を通して受信信号処理部9に入力される。
受信信号処理部9の内部では、周波数変換器10で受信信号105にチャープ変調信号102を混合し、送受信の差分周波数の信号106を得る。送信信号にはチャープ変調がかけられているため、送受信の差分周波数は遅延時間、すなわち目標までの距離に応じた周波数となる。すなわち、本レーダにおいては、距離情報は送受信の差分周波数として得られる。送受信差分周波数の信号106はA/D変換器11でディジタル信号107に変換され、メモリ12に蓄えられる。1ヒット分蓄えられた信号108はFFT処理器13で処理されて目標の距離情報109となり、表示装置14に目標までの距離情報が表示される。
【0011】
なお、チャープ変調信号生成部1はDDS(Direct Digital Synthesizer)等で構成してもよい。また、受信信号処理部9は、内部で送信信号と同様のチャープ変調信号を生成させてもよく、その場合、周波数変換器10も含めてディジタル信号処理で構成することができる。送信タイミング制御器4と受信タイミング制御器8、およびチャープ変調信号生成部1は、制御ユニット15からの制御信号110により制御される。制御ユニット15は、干渉信号源16から干渉信号の送信タイミング情報111を受取り、レーダの送信タイミングと受信タイミング、およびチャープ変調の開始タイミングを決定する。
【0012】
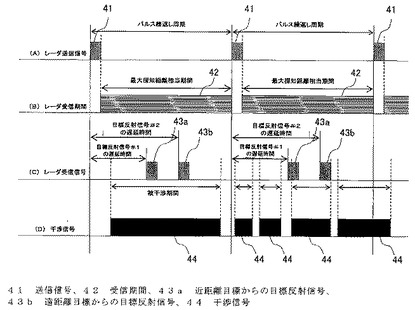
この送受信タイミングやチャープ変調の制御方法に本発明の特徴があるので、これらの制御方法について次に説明する。比較のため、はじめに通常のパルスレーダの問題点について図4を用いて説明する。図において、(A)の縦軸はレーダ送信信号、(B)の縦軸はレーダ受信期間、(C)の縦軸はレーダ受信信号、(D)の縦軸は干渉信号、を示し、各図の横軸は時間を示す。通常のパルスレーダは、パルス状の送信信号41を送信した後、想定する最大探知距離からの反射波の遅延時間に相当する長さの受信期間42を設けて、その受信期間内に目標からの反射波である目標反射信号43a、43bを受信する。
送信信号41を送信してから目標反射信号43a、43bを受信するまでの遅延時間は目標までの距離に依存するため、この遅延時間を計測して目標までの距離を求める。
【0013】
ここで、レーダの近傍に、レーダと同じ周波数帯の干渉信号源が存在する場合を考える。図4(D)に示す干渉信号44が受信期間42内に送信されると、干渉信号44と重複する目標反射信号43a、43bが受信できなくなり、干渉信号が存在する時間に相当する距離内(被干渉期間)の目標を探知することが出来ないという問題がある。図に示す干渉信号44のように、干渉信号がレーダのパルス繰返し周期と同期していない断続性の信号の場合、複数のパルス繰返し周期で繰り返し観測することにより、1回のパルス繰返し周期内で受信できなかった距離の目標反射信号を補う方法が一般には行われている。
【0014】
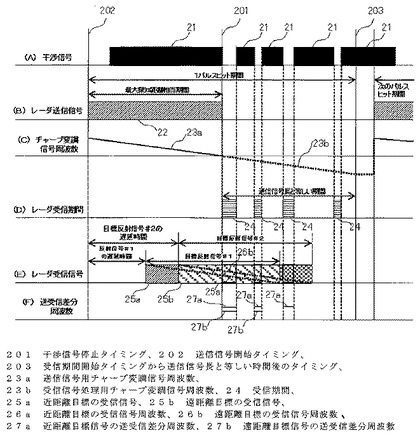
しかし、干渉信号のデューティ比が大きくなると、欠落する目標反射信号が多くなり、レーダ性能が劣化するという問題がある。これを解決するための、本実施の形態におけるレーダ装置の制御動作を表すタイムチャートを図2に示す。図において、(A)の縦軸は干渉信号、(B)の縦軸はレーダ送信信号、(C)の縦軸はチャープ変調信号周波数、(D)の縦軸はレーダ受信期間、(E)の縦軸はレーダ受信信号、(F)の縦軸は送受信差分周波数、を示し、各図の横軸は時間を示す。
【0015】
本実施の形態では、図2に示すように、制御ユニットは干渉信号源16から干渉信号の送信タイミング情報111から、干渉信号21が停止するタイミング201を得る。次に、送信タイミング制御器4は制御ユニットからの制御信号に従い、この干渉信号停止タイミング201より最大探知距離に相当する時間だけ前のタイミング202から、最大探知距離に相当する長さのレーダ送信信号22を送信させる。チャープ変調信号周波数23aは、レーダ信号の送信開始202から、時間とともに線形に変化させ、いわゆるリニアチャープ変調を行う。チャープ変調の周波数変化方向はアップチャープでもダウンチャープでもかまわない。
【0016】
受信期間24は、干渉信号21の停止タイミング201から送信信号長(最大探知距離相当と等しい期間203までの間で、干渉信号21が停止している期間とする。
送信信号の長さが最大探知距離相当と長いため、受信信号は一般に複数の目標からの受信信号25a、25bが重畳したものとなるが、送信信号がチャープ変調されているため、受信期間における周波数は26a、26bのように距離に応じた周波数となっている。そこで受信信号処理部において送信周波数との差分をとることにより27a、27bのように周波数差として距離情報を得ることができる。以上の送信信号、チャープ変調信号周波数、受信期間の一連の流れを1パルスヒット期間とし、次の干渉信号の停止タイミングより最大探知距離相当期間前から次のパルスヒット期間が始まり、それを繰り返す。
【0017】
制御ユニット15は、レーダ装置に送る送信タイミング情報は次のようにして決定する。干渉信号が停止するタイミング201の情報は、干渉信号源16がレーダである場合は、前回パルスを送信したタイミングとパルス繰り返し周期から予測することができ、また、時分割方式の通信装置の場合には通信装置が使用するタイムスロットの情報から予測することができる。また、自ら送信タイミングを制御可能な干渉信号源の場合は、自ら決定する送信スケジュールそのものを用いればよい。
【0018】
このように、本実施の形態によると、干渉信号が停止するタイミングを制御ユニットより受取り、その前に最大探知距離に相当する時間長の送信信号を送信するため、受信期間が短くても、探知距離内に存在する複数目標からの反射信号を受信することができ、従来のレーダで問題となっていた目標反射信号の欠落が生じないという効果を奏する。
また、目標までの距離情報を送受信の差分周波数により得ているため、必要な受信期間が最大探知距離に依存せず、受信期間を短くすることができる。また、パルス変調方式は、低価格で簡易な方式であるため、小型化できる。更に、干渉信号の存在しない時間のみの受信信号を用いて信号処理するため、干渉信号源との干渉を低減し、レーダ性能の劣化が最小限に抑えられるという効果を奏する。
【0019】
実施の形態2.
実施の形態1では、最大探知距離に相当する長さの送信信号にチャープ変調を施して送信するが、電波法やコストの観点から十分な周波数帯域幅を用いることができない場合、チャープ変調の周波数変化率を大きくすることができず、距離の異なる目標信号間の周波数差が小さくなり距離分解能が劣化する可能性がある。本実施の形態はこのような問題に対処するためのものである。ハードウェア構成は実施の形態1と同じため説明を省略する。
【0020】
本実施の形態では、限られた周波数帯域幅でチャープ変調の周波数変化率を大きくするため、送信信号長を短くする。しかし、送信信号長を短くすると、それより狭い距離範囲の目標しか探知できなくなってしまう。そこで、複数のパルスヒットを遠距離用と近距離用に分け、遠距離用パルスヒットでは、送信タイミングと受信タイミングとの間隔を広くして遠距離の目標信号を受信し、近距離用パルスヒットでは送信タイミングと受信タイミングの間隔を狭くすることにより近距離の目標信号を受信し、2つのパルスヒット間で受信する目標信号を合成することによって近距離から最大探知距離までの目標信号を受信する。
【0021】
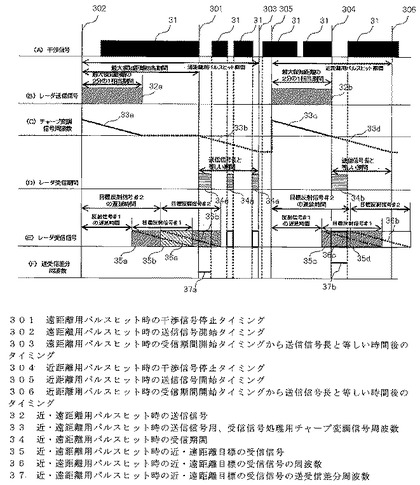
図3に本実施の形態のタイムチャートを示す。図において、(A)の縦軸は干渉信号、(B)の縦軸はレーダ送信信号、(C)の縦軸はチャープ変調信号周波数、(D)の縦軸はレーダ受信期間、(E)の縦軸はレーダ受信信号、(F)の縦軸は送受信差分周波数、を示し、各図の横軸は時間を示す。実施の形態1と同様に、まず、制御ユニットは干渉信号源16から干渉信号の送信タイミング情報111から、干渉信号21が停止するタイミング201を得る。次に、送信タイミング制御器4は制御ユニットからの制御信号に従い、遠距離用パルスヒットでは、干渉信号停止の予測タイミング301より最大探知距離に相当する時間前のタイミング302を送信信号開始タイミングとし、そのタイミングから最大探知距離の2分の1相当の長さのレーダ送信信号32aを送信する。
【0022】
チャープ変調信号周波数33aは、レーダ信号の送信開始302から、リニアチャープ変調を開始するが、実施の形態1に比べて送信信号長が2分の1のため、周波数変化率を2倍にする。また、送信信号32aの送信が終了してから受信期間34の開始まで最大探知距離の2分の1相当の期間があるため、その期間は周波数変化を止めて、受信期間が始まるタイミング301から受信信号処理用のためのチャープ変調信号周波数33bの変調を開始する。受信期間34aは、干渉信号31の停止タイミング301から送信信号長(最大探知距離の2分の1相当)と等しい期間303までの間で、干渉信号31が停止している期間とする。
【0023】
この受信期間には、距離が最大探知距離の2分の1から最大探知距離までの遠距離目標の信号35bのみが受信でき、距離が最大探知距離の2分の1以下の近距離目標の信号35aは受信できない。そこで、次の近距離用パルスヒット時では、干渉信号の停止予測タイミング304と送信信号開始タイミング305の間隔を最大探知距離の2分の1相当とし、その期間に送信信号32bを送信する。
【0024】
チャープ変調信号周波数33cは送信開始305からすぐにチャープ変調を開始し、このパルスヒットでは送信信号停止タイミング304からすぐに受信期間34bが開始するため、送信信号停止タイミング304からも引き続き同じ周波数変化率でチャープ変調信号周波数33dを変化させ、受信信号処理に供する。受信期間34bは送信信号停止タイミング304からすぐに開始するため、遠距離の目標信号35dは受信できないが、近距離の目標信号35cを受信することができ、前のパルスヒットと合わせて、近距離から最大探知距離までの複数の目標反射信号を受信することができる。
【0025】
このように、本実施の形態では近距離から最大探知距離までの期間を2回のパルスヒットに分けて受信し、送信信号長を2分の1に短くすることによって、同じ周波数帯域幅の送受信信号処理系を用いてチャープ変調の周波数変化率を2倍にすることができるので、周波数差として得られる距離分解能を2倍に向上させることができるという効果を奏する。また、同様に、近距離から最大探知距離までの期間を3分の1ずつ3回のパルスヒットに分けて受信し、チャープ変調信号の周波数変化率を3倍にすると、同じ周波数帯域幅の送受信信号処理系を用いて3倍の距離分解能得られる。同様に、より多くのパルスヒットに分割することにより所望の距離分解能を得ることができる。
【符号の説明】
【0026】
1 チャープ変調信号生成部
2 鋸波発生器
3 電圧制御発振器
4 送信タイミング制御器
5 送信アンテナ
6 目標
7 受信アンテナ
8 受信タイミング制御器
9 受信信号処理部
10 周波数変換器
11 A/D変換器
12 メモリ
13 FFT処理器
14 表示装置
15 制御ユニット
16 干渉信号源
21 干渉信号
22 送信信号
23a 送信信号用チャープ変調信号周波数
23b 受信信号処理用チャープ変調信号周波数
24 受信期間
25a 近距離目標の反射信号
25b 遠距離目標の反射信号
26a 近距離目標の反射信号周波数
26b 遠距離目標の反射信号周波数
27a 近距離目標の反射信号の送受信差分周波数
27b 遠距離目標の反射信号の送受信差分周波数
31 干渉信号
32a 遠距離用パルスヒット時の送信信号
32b 近距離用パルスヒット時の送信信号
33a 遠距離用パルスヒット時の送信信号用チャープ変調信号周波数
33b 遠距離用パルスヒット時の受信信号処理用チャープ変調信号周波数
33c 近距離用パルスヒット時の送信信号用チャープ変調信号周波数
33d 近距離用パルスヒット時の受信信号処理用チャープ変調信号周波数
34a 遠距離用パルスヒット時の受信期間
34b 近距離用パルスヒット時の受信期間
35a 遠距離用パルスヒット時の近距離目標の反射信号
35b 遠距離用パルスヒット時の遠距離目標の反射信号
35c 近距離用パルスヒット時の近距離目標の反射信号
35d 近距離用パルスヒット時の遠距離目標の反射信号
36a 遠距離用パルスヒット時の近距離目標の反射信号周波数
36b 遠距離用パルスヒット時の遠距離目標の反射信号周波数
36c 近距離用パルスヒット時の近距離目標の反射信号周波数
36d 近距離用パルスヒット時の遠距離目標の反射信号周波数
37a 遠距離用パルスヒット時の遠距離目標の反射信号の送受信差分周波数
37b 近距離用パルスヒット時の近距離目標の反射信号の送受信差分周波数
41 従来レーダの送信信号
42 従来レーダの受信期間
43a 近距離目標からの目標反射信号
43b 遠距離目標からの目標反射信号
44 干渉信号
101 鋸波
102 チャープ変調信号
103 送信信号
104 目標反射信号
105 受信信号
106 送受信差分周波数信号
107 送受信差分周波数ディジタル信号
108 1ヒット分の送受信差分周波数信号
109 目標の距離情報
110 制御信号
111 干渉信号の送信タイミング情報
201 干渉信号停止タイミング
202 送信信号開始タイミング
203 受信期間開始タイミングから送信信号長と等しい時間後のタイミング
301 遠距離用パルスヒット時の干渉信号停止タイミング
302 遠距離用パルスヒット時の送信信号開始タイミング
303 遠距離用パルスヒット時の受信期間開始タイミングから送信信号長と等しい時間後のタイミング
304 近距離用パルスヒット時の干渉信号停止タイミング
305 近距離用パルスヒット時の送信信号開始タイミング
306 近距離用パルスヒット時の受信期間開始タイミングから送信信号長と等しい時間後のタイミング
【技術分野】
【0001】
この発明は、変調した電波信号を空間に照射して、目標の位置や速度を検出するレーダ装置に関する。特に、近傍に強い干渉信号源が配置されている場合に、この干渉信号源との干渉を回避し、本レーダ装置を有効に動作させる技術に関する。
【背景技術】
【0002】
車両や航空機、艦船等の狭いプラットホームにレーダを搭載する場合、通信装置やECM装置、他のレーダ装置等の電波機器との干渉が問題となる。従来、これらの電波機器間の干渉は、空中線の配置を工夫したり、レーダ同士の場合はレーダ装置ごとにパルスの送信周期を異なるようにする等の対策が採られてきた。例えば後者の例として、特許文献1のような方法がある。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−25944号公報(第1−17頁、第1図)
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示された方法では、車載用レーダ装置ごとにパルス送信間隔(周期)PRIを異なるようにすることにより、干渉の発生頻度を軽減している。また、低価格で簡易な方式であるFMCWレーダや周波CWレーダを採用し、小型化も可能である。しかし、パルスの送信周期を異なるようにしても、レーダ間で非同期の干渉があることは明白であり、探知性能が劣化することは容易に想像できる。また、干渉信号源が通信装置やECM装置等の周期性でない信号を送信する装置である場合、このようなレーダを前提とした干渉対策は実施することができないという問題がある。
【0005】
本発明はこのような課題を解決するためのものであり、近傍に通信装置やECM装置、他のレーダ装置等の強い干渉信号源が配置されている場合であっても、干渉信号源が無い場合と同等のレーダ性能を得ることを目的とする。
【課題を解決するための手段】
【0006】
この発明に係るレーダ装置は、近傍に断続的な干渉信号を送信する干渉信号源が配置され、この干渉信号源の動作を制御する制御ユニットから出力された制御信号に基づいて動作するレーダ装置であって、前記制御信号に従いチャープ変調信号を生成するチャープ変調生成部と、前記制御信号に従い前記チャープ変調信号を送信するタイミングを制御する送信タイミング制御器と、前記チャープ変調信号を放射する送信アンテナと、異なる距離に位置する複数目標からの反射信号を受信する受信アンテナと、前記制御信号に従い受信するタイミングを制御し受信信号を出力する受信タイミング制御器と、前記受信信号に前記チャープ変調信号を混合した送受信信号の差分周波数から各目標の距離を算出する受信信号処理部とを備え、前記送信タイミング制御器は、前記制御ユニットから前記干渉信号の停止タイミング情報を受取り、この停止タイミングより前に予め設定した送信時間長の前記チャープ変調信号を送信し、前記受信タイミング制御器は、前記干渉信号の停止タイミングと同時に、この停止期間内に前記複数目標からの反射信号を受信することを特徴とする。
【発明の効果】
【0007】
本発明によると、目標までの距離情報を送受信の差分周波数から算出するため、必要な受信期間が最大探知距離に依存せず、短期間に探知距離内に存在する複数目標からの反射信号を受信し、距離を算出できる。また、干渉信号の存在しない時間のみの受信信号を用いて信号処理するため、干渉信号の影響を最小限に抑制することができるという効果を奏する。
【図面の簡単な説明】
【0008】
【図1】この発明の実施の形態1に係るレーダ装置の全体構成を表すブロック図である。
【図2】この発明の実施の形態1に係るレーダ装置の制御動作を表すタイムチャートである。
【図3】この発明の実施の形態2に係るレーダ装置の制御動作を表すタイムチャートである。
【図4】従来のパルスレーダ装置に係る制御動作を表すタイムチャートである。
【発明を実施するための形態】
【0009】
実施の形態1.
図1には、本発明による実施の形態1に係るレーダ装置の全体構成を表すブロック図を示す。チャープ変調信号生成部1は鋸波発生器2と電圧制御発振器3から構成され、鋸波101を電圧制御発振器3に入力することによりチャープ変調信号102を生成する。生成されたチャープ変調信号102は、送信タイミング制御器4を通して送信アンテナ5から送信信号103として放射される。送信信号103は目標6に反射されて目標反射信号104となり、受信アンテナ7に受信信号105として受信される。一般に受信信号105は距離の異なる複数の目標からの反射された信号104の和となる。
【0010】
受信信号105は受信タイミング制御器8を通して受信信号処理部9に入力される。
受信信号処理部9の内部では、周波数変換器10で受信信号105にチャープ変調信号102を混合し、送受信の差分周波数の信号106を得る。送信信号にはチャープ変調がかけられているため、送受信の差分周波数は遅延時間、すなわち目標までの距離に応じた周波数となる。すなわち、本レーダにおいては、距離情報は送受信の差分周波数として得られる。送受信差分周波数の信号106はA/D変換器11でディジタル信号107に変換され、メモリ12に蓄えられる。1ヒット分蓄えられた信号108はFFT処理器13で処理されて目標の距離情報109となり、表示装置14に目標までの距離情報が表示される。
【0011】
なお、チャープ変調信号生成部1はDDS(Direct Digital Synthesizer)等で構成してもよい。また、受信信号処理部9は、内部で送信信号と同様のチャープ変調信号を生成させてもよく、その場合、周波数変換器10も含めてディジタル信号処理で構成することができる。送信タイミング制御器4と受信タイミング制御器8、およびチャープ変調信号生成部1は、制御ユニット15からの制御信号110により制御される。制御ユニット15は、干渉信号源16から干渉信号の送信タイミング情報111を受取り、レーダの送信タイミングと受信タイミング、およびチャープ変調の開始タイミングを決定する。
【0012】
この送受信タイミングやチャープ変調の制御方法に本発明の特徴があるので、これらの制御方法について次に説明する。比較のため、はじめに通常のパルスレーダの問題点について図4を用いて説明する。図において、(A)の縦軸はレーダ送信信号、(B)の縦軸はレーダ受信期間、(C)の縦軸はレーダ受信信号、(D)の縦軸は干渉信号、を示し、各図の横軸は時間を示す。通常のパルスレーダは、パルス状の送信信号41を送信した後、想定する最大探知距離からの反射波の遅延時間に相当する長さの受信期間42を設けて、その受信期間内に目標からの反射波である目標反射信号43a、43bを受信する。
送信信号41を送信してから目標反射信号43a、43bを受信するまでの遅延時間は目標までの距離に依存するため、この遅延時間を計測して目標までの距離を求める。
【0013】
ここで、レーダの近傍に、レーダと同じ周波数帯の干渉信号源が存在する場合を考える。図4(D)に示す干渉信号44が受信期間42内に送信されると、干渉信号44と重複する目標反射信号43a、43bが受信できなくなり、干渉信号が存在する時間に相当する距離内(被干渉期間)の目標を探知することが出来ないという問題がある。図に示す干渉信号44のように、干渉信号がレーダのパルス繰返し周期と同期していない断続性の信号の場合、複数のパルス繰返し周期で繰り返し観測することにより、1回のパルス繰返し周期内で受信できなかった距離の目標反射信号を補う方法が一般には行われている。
【0014】
しかし、干渉信号のデューティ比が大きくなると、欠落する目標反射信号が多くなり、レーダ性能が劣化するという問題がある。これを解決するための、本実施の形態におけるレーダ装置の制御動作を表すタイムチャートを図2に示す。図において、(A)の縦軸は干渉信号、(B)の縦軸はレーダ送信信号、(C)の縦軸はチャープ変調信号周波数、(D)の縦軸はレーダ受信期間、(E)の縦軸はレーダ受信信号、(F)の縦軸は送受信差分周波数、を示し、各図の横軸は時間を示す。
【0015】
本実施の形態では、図2に示すように、制御ユニットは干渉信号源16から干渉信号の送信タイミング情報111から、干渉信号21が停止するタイミング201を得る。次に、送信タイミング制御器4は制御ユニットからの制御信号に従い、この干渉信号停止タイミング201より最大探知距離に相当する時間だけ前のタイミング202から、最大探知距離に相当する長さのレーダ送信信号22を送信させる。チャープ変調信号周波数23aは、レーダ信号の送信開始202から、時間とともに線形に変化させ、いわゆるリニアチャープ変調を行う。チャープ変調の周波数変化方向はアップチャープでもダウンチャープでもかまわない。
【0016】
受信期間24は、干渉信号21の停止タイミング201から送信信号長(最大探知距離相当と等しい期間203までの間で、干渉信号21が停止している期間とする。
送信信号の長さが最大探知距離相当と長いため、受信信号は一般に複数の目標からの受信信号25a、25bが重畳したものとなるが、送信信号がチャープ変調されているため、受信期間における周波数は26a、26bのように距離に応じた周波数となっている。そこで受信信号処理部において送信周波数との差分をとることにより27a、27bのように周波数差として距離情報を得ることができる。以上の送信信号、チャープ変調信号周波数、受信期間の一連の流れを1パルスヒット期間とし、次の干渉信号の停止タイミングより最大探知距離相当期間前から次のパルスヒット期間が始まり、それを繰り返す。
【0017】
制御ユニット15は、レーダ装置に送る送信タイミング情報は次のようにして決定する。干渉信号が停止するタイミング201の情報は、干渉信号源16がレーダである場合は、前回パルスを送信したタイミングとパルス繰り返し周期から予測することができ、また、時分割方式の通信装置の場合には通信装置が使用するタイムスロットの情報から予測することができる。また、自ら送信タイミングを制御可能な干渉信号源の場合は、自ら決定する送信スケジュールそのものを用いればよい。
【0018】
このように、本実施の形態によると、干渉信号が停止するタイミングを制御ユニットより受取り、その前に最大探知距離に相当する時間長の送信信号を送信するため、受信期間が短くても、探知距離内に存在する複数目標からの反射信号を受信することができ、従来のレーダで問題となっていた目標反射信号の欠落が生じないという効果を奏する。
また、目標までの距離情報を送受信の差分周波数により得ているため、必要な受信期間が最大探知距離に依存せず、受信期間を短くすることができる。また、パルス変調方式は、低価格で簡易な方式であるため、小型化できる。更に、干渉信号の存在しない時間のみの受信信号を用いて信号処理するため、干渉信号源との干渉を低減し、レーダ性能の劣化が最小限に抑えられるという効果を奏する。
【0019】
実施の形態2.
実施の形態1では、最大探知距離に相当する長さの送信信号にチャープ変調を施して送信するが、電波法やコストの観点から十分な周波数帯域幅を用いることができない場合、チャープ変調の周波数変化率を大きくすることができず、距離の異なる目標信号間の周波数差が小さくなり距離分解能が劣化する可能性がある。本実施の形態はこのような問題に対処するためのものである。ハードウェア構成は実施の形態1と同じため説明を省略する。
【0020】
本実施の形態では、限られた周波数帯域幅でチャープ変調の周波数変化率を大きくするため、送信信号長を短くする。しかし、送信信号長を短くすると、それより狭い距離範囲の目標しか探知できなくなってしまう。そこで、複数のパルスヒットを遠距離用と近距離用に分け、遠距離用パルスヒットでは、送信タイミングと受信タイミングとの間隔を広くして遠距離の目標信号を受信し、近距離用パルスヒットでは送信タイミングと受信タイミングの間隔を狭くすることにより近距離の目標信号を受信し、2つのパルスヒット間で受信する目標信号を合成することによって近距離から最大探知距離までの目標信号を受信する。
【0021】
図3に本実施の形態のタイムチャートを示す。図において、(A)の縦軸は干渉信号、(B)の縦軸はレーダ送信信号、(C)の縦軸はチャープ変調信号周波数、(D)の縦軸はレーダ受信期間、(E)の縦軸はレーダ受信信号、(F)の縦軸は送受信差分周波数、を示し、各図の横軸は時間を示す。実施の形態1と同様に、まず、制御ユニットは干渉信号源16から干渉信号の送信タイミング情報111から、干渉信号21が停止するタイミング201を得る。次に、送信タイミング制御器4は制御ユニットからの制御信号に従い、遠距離用パルスヒットでは、干渉信号停止の予測タイミング301より最大探知距離に相当する時間前のタイミング302を送信信号開始タイミングとし、そのタイミングから最大探知距離の2分の1相当の長さのレーダ送信信号32aを送信する。
【0022】
チャープ変調信号周波数33aは、レーダ信号の送信開始302から、リニアチャープ変調を開始するが、実施の形態1に比べて送信信号長が2分の1のため、周波数変化率を2倍にする。また、送信信号32aの送信が終了してから受信期間34の開始まで最大探知距離の2分の1相当の期間があるため、その期間は周波数変化を止めて、受信期間が始まるタイミング301から受信信号処理用のためのチャープ変調信号周波数33bの変調を開始する。受信期間34aは、干渉信号31の停止タイミング301から送信信号長(最大探知距離の2分の1相当)と等しい期間303までの間で、干渉信号31が停止している期間とする。
【0023】
この受信期間には、距離が最大探知距離の2分の1から最大探知距離までの遠距離目標の信号35bのみが受信でき、距離が最大探知距離の2分の1以下の近距離目標の信号35aは受信できない。そこで、次の近距離用パルスヒット時では、干渉信号の停止予測タイミング304と送信信号開始タイミング305の間隔を最大探知距離の2分の1相当とし、その期間に送信信号32bを送信する。
【0024】
チャープ変調信号周波数33cは送信開始305からすぐにチャープ変調を開始し、このパルスヒットでは送信信号停止タイミング304からすぐに受信期間34bが開始するため、送信信号停止タイミング304からも引き続き同じ周波数変化率でチャープ変調信号周波数33dを変化させ、受信信号処理に供する。受信期間34bは送信信号停止タイミング304からすぐに開始するため、遠距離の目標信号35dは受信できないが、近距離の目標信号35cを受信することができ、前のパルスヒットと合わせて、近距離から最大探知距離までの複数の目標反射信号を受信することができる。
【0025】
このように、本実施の形態では近距離から最大探知距離までの期間を2回のパルスヒットに分けて受信し、送信信号長を2分の1に短くすることによって、同じ周波数帯域幅の送受信信号処理系を用いてチャープ変調の周波数変化率を2倍にすることができるので、周波数差として得られる距離分解能を2倍に向上させることができるという効果を奏する。また、同様に、近距離から最大探知距離までの期間を3分の1ずつ3回のパルスヒットに分けて受信し、チャープ変調信号の周波数変化率を3倍にすると、同じ周波数帯域幅の送受信信号処理系を用いて3倍の距離分解能得られる。同様に、より多くのパルスヒットに分割することにより所望の距離分解能を得ることができる。
【符号の説明】
【0026】
1 チャープ変調信号生成部
2 鋸波発生器
3 電圧制御発振器
4 送信タイミング制御器
5 送信アンテナ
6 目標
7 受信アンテナ
8 受信タイミング制御器
9 受信信号処理部
10 周波数変換器
11 A/D変換器
12 メモリ
13 FFT処理器
14 表示装置
15 制御ユニット
16 干渉信号源
21 干渉信号
22 送信信号
23a 送信信号用チャープ変調信号周波数
23b 受信信号処理用チャープ変調信号周波数
24 受信期間
25a 近距離目標の反射信号
25b 遠距離目標の反射信号
26a 近距離目標の反射信号周波数
26b 遠距離目標の反射信号周波数
27a 近距離目標の反射信号の送受信差分周波数
27b 遠距離目標の反射信号の送受信差分周波数
31 干渉信号
32a 遠距離用パルスヒット時の送信信号
32b 近距離用パルスヒット時の送信信号
33a 遠距離用パルスヒット時の送信信号用チャープ変調信号周波数
33b 遠距離用パルスヒット時の受信信号処理用チャープ変調信号周波数
33c 近距離用パルスヒット時の送信信号用チャープ変調信号周波数
33d 近距離用パルスヒット時の受信信号処理用チャープ変調信号周波数
34a 遠距離用パルスヒット時の受信期間
34b 近距離用パルスヒット時の受信期間
35a 遠距離用パルスヒット時の近距離目標の反射信号
35b 遠距離用パルスヒット時の遠距離目標の反射信号
35c 近距離用パルスヒット時の近距離目標の反射信号
35d 近距離用パルスヒット時の遠距離目標の反射信号
36a 遠距離用パルスヒット時の近距離目標の反射信号周波数
36b 遠距離用パルスヒット時の遠距離目標の反射信号周波数
36c 近距離用パルスヒット時の近距離目標の反射信号周波数
36d 近距離用パルスヒット時の遠距離目標の反射信号周波数
37a 遠距離用パルスヒット時の遠距離目標の反射信号の送受信差分周波数
37b 近距離用パルスヒット時の近距離目標の反射信号の送受信差分周波数
41 従来レーダの送信信号
42 従来レーダの受信期間
43a 近距離目標からの目標反射信号
43b 遠距離目標からの目標反射信号
44 干渉信号
101 鋸波
102 チャープ変調信号
103 送信信号
104 目標反射信号
105 受信信号
106 送受信差分周波数信号
107 送受信差分周波数ディジタル信号
108 1ヒット分の送受信差分周波数信号
109 目標の距離情報
110 制御信号
111 干渉信号の送信タイミング情報
201 干渉信号停止タイミング
202 送信信号開始タイミング
203 受信期間開始タイミングから送信信号長と等しい時間後のタイミング
301 遠距離用パルスヒット時の干渉信号停止タイミング
302 遠距離用パルスヒット時の送信信号開始タイミング
303 遠距離用パルスヒット時の受信期間開始タイミングから送信信号長と等しい時間後のタイミング
304 近距離用パルスヒット時の干渉信号停止タイミング
305 近距離用パルスヒット時の送信信号開始タイミング
306 近距離用パルスヒット時の受信期間開始タイミングから送信信号長と等しい時間後のタイミング
【特許請求の範囲】
【請求項1】
近傍に断続的な干渉信号を送信する干渉信号源が配置され、この干渉信号源の動作を制御する制御ユニットから出力された制御信号に基づいて動作するレーダ装置であって、
前記制御信号に従いチャープ変調信号を生成するチャープ変調生成部と、
前記制御信号に従い前記チャープ変調信号を送信するタイミングを制御する送信タイミング制御器と、
前記チャープ変調信号を放射する送信アンテナと、
異なる距離に位置する複数目標からの反射信号を受信する受信アンテナと、
前記制御信号に従い受信するタイミングを制御し受信信号を出力する受信タイミング制御器と、
前記受信信号に前記チャープ変調信号を混合した送受信信号の差分周波数から各目標の距離を算出する受信信号処理部とを備え、
前記送信タイミング制御器は、前記制御ユニットから前記干渉信号の停止タイミング情報を受取り、この停止タイミングより前に予め設定した送信時間長の前記チャープ変調信号を送信し、
前記受信タイミング制御器は、前記干渉信号の停止タイミングと同時に、この停止期間内に前記複数目標からの反射信号を受信する
ことを特徴とするレーダ装置。
【請求項2】
前記送信時間長が、想定する最大探知距離に相当する時間長である
ことを特徴とする請求項1に記載のレーダ装置。
【請求項3】
前記送信時間長が想定する最大探知距離に相当する時間長より短かく、送信信号の送信開始タイミングから受信期間開始タイミングまで時間長をパルスヒットごとに変えることにより、複数のパルスヒットを用いて異なる距離範囲の目標を探知する
ことを特徴とする請求項1に記載のレーダ装置。
【請求項1】
近傍に断続的な干渉信号を送信する干渉信号源が配置され、この干渉信号源の動作を制御する制御ユニットから出力された制御信号に基づいて動作するレーダ装置であって、
前記制御信号に従いチャープ変調信号を生成するチャープ変調生成部と、
前記制御信号に従い前記チャープ変調信号を送信するタイミングを制御する送信タイミング制御器と、
前記チャープ変調信号を放射する送信アンテナと、
異なる距離に位置する複数目標からの反射信号を受信する受信アンテナと、
前記制御信号に従い受信するタイミングを制御し受信信号を出力する受信タイミング制御器と、
前記受信信号に前記チャープ変調信号を混合した送受信信号の差分周波数から各目標の距離を算出する受信信号処理部とを備え、
前記送信タイミング制御器は、前記制御ユニットから前記干渉信号の停止タイミング情報を受取り、この停止タイミングより前に予め設定した送信時間長の前記チャープ変調信号を送信し、
前記受信タイミング制御器は、前記干渉信号の停止タイミングと同時に、この停止期間内に前記複数目標からの反射信号を受信する
ことを特徴とするレーダ装置。
【請求項2】
前記送信時間長が、想定する最大探知距離に相当する時間長である
ことを特徴とする請求項1に記載のレーダ装置。
【請求項3】
前記送信時間長が想定する最大探知距離に相当する時間長より短かく、送信信号の送信開始タイミングから受信期間開始タイミングまで時間長をパルスヒットごとに変えることにより、複数のパルスヒットを用いて異なる距離範囲の目標を探知する
ことを特徴とする請求項1に記載のレーダ装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−76568(P2013−76568A)
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願番号】特願2011−214896(P2011−214896)
【出願日】平成23年9月29日(2011.9.29)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願日】平成23年9月29日(2011.9.29)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]