
レーダ装置
【課題】DDOA法に基づくレーダ装置においてDOAの不定性を軽減するためのレーダシステムを提供する。
【解決手段】レーダー装置は、距離、方向、速度を記憶するデータ記憶部114と、目標物体150の運動軌跡を予測する追尾予測部115と、レンジの近接を判定し、レンジ制御信号を生成する干渉判定部116と、レンジ制御信号に応じて送信用拡散符号、受信用拡散符号の一方に1チップ未満の位相オフセットを与える符号制御部109と、レンジ制御信号に応じて干渉除去処理を行う干渉分離部110とを備え、干渉分離部110は、レンジ制御信号に応じて、近接する目標物体の当該レンジの信号または当該レンジに隣接するレンジの信号の一方を選択し、距離決定部111、速度検知部112、方向検知部113の入力とする。
【解決手段】レーダー装置は、距離、方向、速度を記憶するデータ記憶部114と、目標物体150の運動軌跡を予測する追尾予測部115と、レンジの近接を判定し、レンジ制御信号を生成する干渉判定部116と、レンジ制御信号に応じて送信用拡散符号、受信用拡散符号の一方に1チップ未満の位相オフセットを与える符号制御部109と、レンジ制御信号に応じて干渉除去処理を行う干渉分離部110とを備え、干渉分離部110は、レンジ制御信号に応じて、近接する目標物体の当該レンジの信号または当該レンジに隣接するレンジの信号の一方を選択し、距離決定部111、速度検知部112、方向検知部113の入力とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、移動物体を検知し、追尾するレーダ装置に関する。
【背景技術】
【0002】
近年、安全、快適に暮らせる住環境が重視されるようになり、日常生活において、人間の不審行動の監視や周囲に散在する危険からの回避を目的として、人間を検知してその移動を追尾することが必要な場合がある。また、多数の人間がそれぞれの意思で動き回っている空間の中で人共存型ロボットをうまく走行させるため、ロボットの周辺に存在する人間やその他の障害物をセンシングする必要がある。
【0003】
このようなシーンは、見通しのよい空間よりも、火災で煙の立ちこめた環境や夜間街灯のない暗闇、さらには壁を隔てた空間など、通常とは異なる条件で、より人間のセンシングが求められ、活用されると考えられる。
【0004】
すなわち、いかに劣悪な環境でも、人間をうまく検知し、その行動や移動軌跡を予測できることが必要である。
【0005】
そのような環境にも適用できるセンシング手段としては、ミリ波レーダなどの電波センサがある。レーダは相対速度と相対距離とを同時かつ瞬時に計測可能であることから、特に自動車用のセンシングシステムとして既に実用化されている。
物体が何であるのかをできる限り精度よく区別するためには、物体の運動の同定に必要な速度に加え、物体の形状の同定に必要な距離と角度を計測する方法がよい。
【0006】
そのようなレーダを用いて歩行者など人間の形状や運動を計測する試みとして、ドップラー(Doppler)シフトによる速度検知とDOA(Direction-of-Arrival)による到来方向検知とを組み合わせたDDOA(Doppler and Direction-of-Arrival)法と呼ばれる方法が知られている。(非特許文献1)
DDOA法によると、人間の腕や脚、胴体、頭部などの運動がスペクトルの微細な構造(マイクロドップラー)として観測可能であることから、その微細構造を分析、解析することによって、人間の検出あるいは人間の動作同定にも利用することができる。DDOA法では、人間とそれ以外とを区別することができるようになる。
ところで、一般的なDDOA法によると、観測可能な全範囲を対象としてドップラー信号処理およびDOA信号処理を行うため、さまざまな干渉を受けやすいという問題がある。
そのような場合、パルスドップラーレーダを用い、距離ゲート(レンジビン)を設けるという考え方がある。(例えば、特許文献1参照。)
従来例によると、モノパルスドップラレーダ装置1は、A/D変換部26からI信号ディジタル値、Q信号ディジタル値を入力してターゲットの距離、相対速度及び方位を算出するディジタル演算処理部として、主演算処理部30と高速演算が可能な補助演算処理部40の2つを備える構成としている。補助演算処理部40では、演算量が多いプリサム処理、FFT処理、及びターゲット判定処理を行わせ、主演算処理部30では、方位算出処理を行わせている。また、主演算処理部30における方位算出処理は、ターゲット判定処理でターゲットが検出された距離ゲートおよび周波数ゲートに対してのみ行わせるようにすることで、方位算出処理で行う演算量を大幅に低減している。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2010−230473号公報
【非特許文献】
【0008】
【非特許文献1】“Two−dimensional human tracking using a three−element Doppler and direction−of−arrival (DDOA) radar” Lin, A.; Ling, H., IEEE Radar Conference, April 2006.
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかしながら、従来の距離ゲートを有するレーダであるスペクトラム拡散方式とDDOA法に基づくレーダ装置によると、観測したいターゲットや観測範囲、観測周期に応じてレンジビンの幅を予め設計しておくことが前提であり、レーダの走査方法に関して、動的なパラメータ変更は想定されていない。
【0010】
さらに、単純にレンジビン幅を狭める(例えば1/2にする)とき、次のような問題点が考えられる。(1)電波の占有帯域幅が2倍となり、電波資源監理上の制限を受ける場合がある。(2)最大探知距離や最大観測速度、観測周期といった観測条件を確保するためには、信号のS/N比を3dB相当も犠牲にせざるを得ない。
【0011】
特に(2)については、DDOA法のように、散乱断面積の小さいものを見ようとしているシステムでは、S/N比の劣化が検知精度に与える影響が大きい。
【0012】
そこで、本発明は、前記従来の課題を鑑み、DDOA法に基づくレーダ装置においてDOAの不定性を軽減するためのレーダシステムを提供することを目的とする。
【課題を解決するための手段】
【0013】
前記従来の課題を解決するため、本発明のレーダ装置は、目標物体の距離を算出する距離決定部と、目標物体の方向を算出する方向検知部と、目標物体の相対速度を算出する速度検知部とを有するレーダシステムであって、前記距離決定部、方向検知部、速度検知部の出力を記憶するデータ記憶部と、前記データ記憶部の出力に基づいて目標物体の運動軌跡を予測する追尾予測部と、前記予測追尾部の出力及び、前記データ記憶部の出力に基づいてレンジの接近を判定し、レンジ制御信号を生成する干渉判定部と、前記レンジ制御信号に応じて送信用拡散符号、受信用拡散符号の一方に1チップ未満の位相オフセットを与える符号制御部と、前記レンジ制御信号に応じて干渉分離処理を行う干渉分離部とを備え、
前記干渉分離部は、レンジ制御信号に応じて、近接する目標物体の存在する当該レンジの信号または当該レンジに隣接するレンジの信号の一方を選択し、前記距離決定部、方向検知部、速度検知部の入力とすることを特徴とする。
【0014】
本構成によって、DDOA法に基づくレーダ装置においてDOAの不定性を軽減することができる。
【発明の効果】
【0015】
本発明の移動機器用レーダシステムによれば、DOAの不定性を軽減し、移動物体を安定に検知及び追尾可能なレーダシステムを実現することができる。
【図面の簡単な説明】
【0016】
【図1】本発明の実施形態1におけるレーダシステムの概略を表すブロック図
【図2】本発明で想定するレーダシステムと目標物体の構成を表す模式図
【図3】本発明で想定するDOA不定性の発現を説明するグラフ
【図4】スペクトラム拡散方式のレーダにおける、レンジ区切りと目標位置の推定を説明する模式図
【図5】本発明の実施形態1におけるレンジ区切りの効果を説明する模式図
【図6】本発明の実施形態1における干渉判定部の判定フローを説明する模式図
【図7】本発明の実施形態1におけるオフセット量の決定方法を表す模式図
【図8A】本発明の実施形態1におけるオフセット量の決定方法を表す模式図
【図8B】本発明の実施形態1におけるオフセット量の決定方法を表す模式図
【図8C】本発明の実施形態1におけるオフセット量の決定方法を表す模式図
【図9】本発明の実施形態1におけるオフセット量の決定方法を表す模式図
【図10】本発明の実施形態1における符号制御部の概略を表すブロック図
【図11】本発明の実施形態1における符号のオフセット量制御の概略を説明するタイミングを示す図
【図12】本発明の実施形態2の原理を説明する図
【図13】本発明の実施形態3の原理を説明する図
【図14】本発明の実施形態4におけるレーダシステムの概略の一部を表すブロック図
【図15】本発明の実施形態4における符号制御部の構成の概略を表すブロック図
【図16】従来のレーダシステムの概略図
【発明を実施するための形態】
【0017】
以下、本発明の実施の形態について、図面を参照しながら説明する。
【0018】
(実施の形態1)
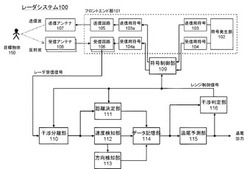
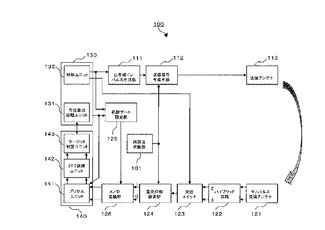
図1は、本発明の実施形態1におけるレーダシステム100の概略を表すブロック図である。
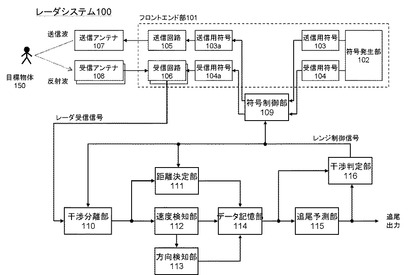
レーダシステム100は、スペクトラム拡散レーダのフロントエンド部101と、符号制御部109と、距離決定部111と、速度検知部112と、方向検知部113と、データ記憶部114と、追尾予測部115と、干渉判定部116と、干渉分離部110と備える。
【0019】
スペクトラム拡散レーダのフロントエンド部101は、スペクトル拡散用の拡散符号(例えば、擬似雑音符号)として送信用符号103及び受信用符号104を生成する符号発生部102と、送信回路105と、受信回路106とを備える。送信回路105及び受信回路106は、それぞれ送信アンテナ107及び受信アンテナ108と接続されている。図1に、符合発生部102から符号制御部109に送信する送信用符号103及び受信用符号104と、符号制御部109から送信回路105に送信する送信用符号103aと、符号制御部109から受信回路106に送信する受信用符号104aを、便宜上記載している。
【0020】
なお、目標物体150の形状又は速度の分布を知るためには、2次元の平面または3次元の空間上の反射点の分布を計測する必要があるので、受信アンテナ108は少なくとも2つ設置することが好ましい。それに応じて受信回路106についても併置しておくことが好ましい。
【0021】
(符号発生部102)
符号発生部102は、送信用符号103及び受信用符号104を発生する。送信用符号103及び受信用符号104は、同一の生成多項式により生成された擬似雑音符号である。
【0022】
例えば、よく知られたスペクトラム拡散レーダの構成のように、受信用符号は送信用符号を1チップ単位で順次遅延できるようにしてあって、これを用いて送信波と反射波との相関演算を行い、距離を算出する。この相関演算の結果、距離は離散的に算出され、1チップに相当する長さ(例えば、符号速度が250Mcpsの場合60cm)が距離の分解能となる。
【0023】
以下、相関演算後の信号を、レーダ受信信号と呼ぶ。レーダ受信信号は、受信チャネルの数だけ存在する。1チャネルあたりのレーダ受信信号は、複素信号である。複素信号は、同相の成分(I相という)とそれに直交する成分(Q相という)とを含む。
【0024】
実際の距離の決定は、受信回路での相関演算の後、距離決定部111において実施される。距離決定部111では、レンジビン単位で離散的にしか計測できない距離に対して補間演算を行うことにより、レンジビン内の詳細な距離を推定する。距離決定部111の出力はデータ記憶部114に格納される。
【0025】
補間演算の方法としては、一般的な1次元フーリエ補間による方法以外にも、補間テーブルを参照する方法、補間テーブルを近似曲線で表した補間関数を適用する方法を用いることができる。
【0026】
この補間演算のため、距離決定部111は、予め定める距離補間の関係117を有していることが好ましい。
【0027】
速度検知部112は、レーダ受信信号の周波数を解析する。例えば、ドップラー信号処理を用いる。具体的には、速度検知部112は、高速フーリエ変換(Fast Fourier Transform,FFT)により、レーダ受信信号の周波数を解析する。この速度検知部112は、反射波のドップラースペクトルを解析し、必要に応じてスペクトルのピークとその位相、そのドップラー周波数を抽出する。速度検知部112は、ドップラー周波数を予め定めた係数で演算し、速度に変換する。速度検知部112は、データ記憶部114に格納される。
【0028】
方向検知部113は、速度検知部112で得られたドップラースペクトル(パワー特性と位相特性)について、各受信チャネル間で位相特性の差分を演算(DOA信号処理)することにより、反射点の方向を算定する。受信チャネルが2の場合、方向は一次元(例えば、方位角のみ)、受信チャネルが3の場合、方向は2次元(例えば、方位角と仰角)である。なお、受信チャネルとは、受信アンテナ、受信回路の系統を指す。方向検知部113の出力は、データ記憶部に格納される。
【0029】
このように、データ記憶部114には、速度、距離、方向のデータが格納されている。距離と方向は位置を示すことから、データ記憶部114には速度と位置とが適切に関連付けられて格納されており、必要に応じて取り出すことができる。
【0030】
追尾予測部115は、データ記憶部114に格納された、速度と位置の情報を使って、分布する反射点の代表点を決定したり、クラスタリングを行って目標物体の個数を管理したり、代表点の情報をカルマンフィルタに入力し、目標物体の移動軌跡を予測も含めて計算したりする。
【0031】
追尾予測部115の出力(追尾出力)は、予測フィルタによる事前推定値(ここでは予測値という)、事後推定値(ここでは軌跡値という)である。追尾出力は、位置(距離と方向)、速度(視線方向と接線方向)を含む。
なお、軌跡値として、事後推定値の変わりに計測値そのものを用いてもよい。
【0032】
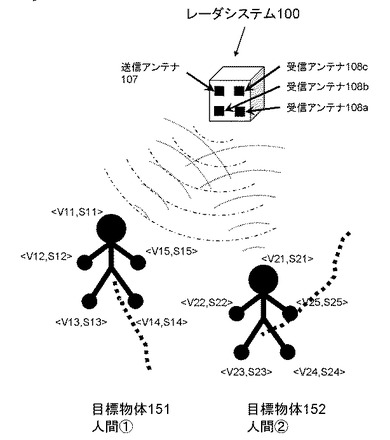
図2は、受信アンテナを3つ設けたレーダシステムを用いて、人間2人を検知し、追尾する状況を想定した模式図である。受信アンテナをそれぞれ受信アンテナ108a、108b、108cとし、それらをまとめて受信アンテナ108と表記することがある。
【0033】
3つの受信アンテナ108を互いの方向が独立となるように(ここでは直交するように)設置しているため、反射点の水平方向(すなわち方位角)、鉛直方向(すなわち仰角)、その相対速度を計測することができる。
【0034】
例えば、運動速度V(視線方向のスカラー量)と位置S(空間座標のベクトル量)を<V,S>と表すことにすると、人間151と人間152の頭部、腕、反対側の腕、脚、反対側の脚は、それぞれ、<V11,S11>、<V12,S12>、<V13,S13>、<V14,S14>、<V15,S15>、および、<V21,S21>、<V22,S22>、<V23,S23>、<V24,S24>、<V25,S25>として正しく観測することができる。実際の観測では、さらに細かい運動状態を取得可能であるが、模式図では簡略化している。
【0035】
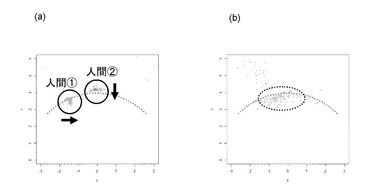
図3(a)及び図3(b)は、人間2人の場合、観測結果の見え方について、数値計算で検証したグラフである。図3(a)は、人間1と人間2とが、少なくとも1レンジビン以上離れている場合、同3(b)は、人間1と人間2とが、同一レンジビンに存在する場合を示している。図3では、3次元の<V,S>の分布を2次元平面に投影した結果を示しており、各点が反射点に対応している。
【0036】
図3(a)のように、複数の人間がそれぞれ異なるレンジビンに存在する場合、人間1と人間2は、分布のまとまりが明確であるため、容易にクラスタリングできる。
ところが、図3(b)のように、複数の人間の存在する領域が同一レンジビンになった途端に、<V,S>の分布が大きく広がり、クラスタリングが困難になる。これが、DOAの不定と呼んでいる現象の発現である。
【0037】
DOA不定が発現した状況を、ここでは「速度干渉」、あるいは単純に「干渉」と表現する。干渉は、上述の通り、同一のレンジビンに複数の速度成分を有する目標物体が存在する場合に発生する可能性がある。ところが実際は、目標物体の受信相関出力は、その隣接するレンジでもゼロにはならず、目標物体の存在するレンジ内の距離に依存することがわかっている。ここでは、これを「漏れ信号」と呼び、距離決定部における距離補間演算でも積極的に利用されている。
【0038】
したがって、干渉の影響は、レンジビン1つ分に限らず、レンジビン2つ分でも発生する可能性が十分にあり、干渉の影響を排除するには、一般に複数の目標物体が2レンジビン以上離れていることが必要である。
【0039】
ここで、実施形態1では、干渉判定部116、符号制御部109、干渉分離部110を有していることから、DOA不定を軽減することができる。予め各ブロックの機能をまず簡単に説明し、詳細は後述する。
【0040】
干渉判定部116は、追尾予測部115の出力と、データ記憶部114の出力を使い、複数の目標物体が干渉を起こしうる範囲に存在するかどうかを判定し、レンジ制御信号を出力する。
【0041】
符号制御部109は、レンジ制御信号に基づいて、符号発生部102で生成した送信用符号103、受信用符号104の一方に、1チップ未満の位相オフセットを与える。符号制御部を通した拡散符号をそれぞれ送信用符号103a、受信用符号104aとして区別するが、少なくとも一方はオフセットが付加されていない。
【0042】
干渉分離部110は、レンジ制御信号に基づいて、信号の干渉成分を除去する処理を行う。この際、距離決定部111では、レンジ制御信号に基づいて、付与された位相オフセットに相当する距離を補正する機能を有することを加えておく。
【0043】
発明の原理について、図4〜図5を用い、干渉分離部110の機能を詳細に記述することで説明する。
【0044】
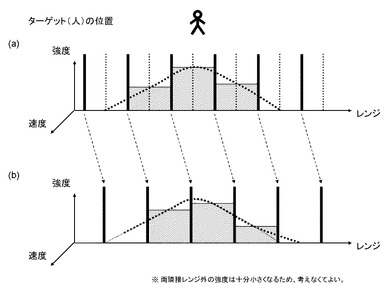
図4は、目標物体が1つ(1人)の場合のレーダ受信信号の波形の模式図である。図4(a)は、目標物体が存在するとき、あるドップラー速度におけるレンジ方向の強度分布、すなわち、波形を表している。ドップラー速度のうちの1つを取り出して表示しているが、実際には、目標物体が有する速度に応じて、同図と同様な波形を対応するドップラー速度に対しても描くことができる。
【0045】
この模式波形において柱状に表したものは、理想的な「矩形応答波形」である。実際はこのような理想的な波形にはならず、インパルス応答の重ね合わせになるが、便宜上、矩形応答波形によって説明する。
【0046】
この矩形応答波形からもわかるように、目標物体が存在するレンジのみならず、それに隣接するレンジもある程度の信号強度を有している。これが漏れ信号と表現したものである。
【0047】
漏れ信号も含め、各レンジの矩形応答波形における中央部分を結ぶように曲線を形成した「ガイド波形」も、合わせて表示している。
【0048】
ガイド波形は、1次元のフーリエ補間などの補間手段によって得られるフィルタ波形であると考えてよい。ガイド波形のピーク位置のレンジ座標はその反射点の距離と考えることができ、レンジ内の距離を精度よく推定できるのはこのためである。
【0049】
また、ひとつの目標物体に対して矩形応答波形の強度がゼロでない部分を、中央レンジとそれに隣接するレンジの3レンジ分しか考慮していないが、さらに外側(隣隣接)のレンジの信号強度は一般に十分小さく、考えなくてもよい。
【0050】
逆に、3レンジ分のみを考えればよいように、レンジビン幅を設定しておくことが好ましい。具体的には、目標物体が主に人間である場合には、レンジビン幅を人幅程度に設定しておくとよい。さらに具体的には、符号速度を250Mcpsとし、レンジビン幅を60cmとするとなお好ましい。(この数値は、想定される利用シーンの要求から定まるスペックと矛盾しない)
ここで同図(b)のように、レンジの区切り位置が同図(a)と異なる場合を考える。同図(b)では、レンジ区切りをレンジビン幅の1/2分だけ、遠方へシフトさせたものである。
【0051】
この結果、矩形応答波形の形状は、同図(a)の場合とは異なったものとなる。ところが、このガイド波形は、同図(a)と(b)でほぼ同様のものになる。言い換えれば、もともとガイド波形が存在し、それをいかにサンプリングするかが異なっているだけである。
このことから、レンジの区切り位置すなわち符号の位相オフセット量は、目標物体の位置の同定には影響を与えない、ということを確認できる。
【0052】
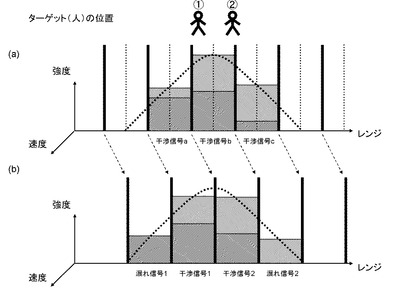
続いて、図5は、2つの目標物体が近接して存在する場合の波形を示したものである。
なお、速度干渉の起こりうる状態を「干渉予備状態」とし、干渉予備状態における目標物体は、「近接」している、と呼ぶことにする。
【0053】
同図(a)、(b)でもガイド波形は同一であるが、(a)では、同一レンジビン内に人間1、人間2が同時に存在し、干渉が極めて起こりやすい状況になっている一方、同図(b)では、人間1、人間2は隣接しているものの異なるレンジに分離されている。
【0054】
なお、干渉が緩和された結果、各ドップラー速度における波形が、符号の位相オフセットによって変化する場合があるが、ここでは波形は変化しないものとして考える。
【0055】
この図5において、矩形応答波形の人間1の成分と人間2の成分と表示を変えて図示しているが、積層された矩形応答波形は、実際には受信の段階で既に混合され、分離することはできないことを強調しておく。
【0056】
ここで、同図(b)において、最外部にある2つのレンジに着目すると、そこには漏れ信号のみが存在することがわかる。その内側の積層された矩形応答波形(ただしくは、混合された矩形応答波形)とは意義が全く異なる。目標物体が同一レンジビンに入りそうな状況で、レンジ区切りを変更できれば、この漏れ信号をドップラー信号処理、DOA信号処理に適用することができる。
【0057】
干渉分離部は、おもにこの漏れ信号を有効に抽出する処理を行うブロックである。本実施形態1はこの最外部の漏れ信号に着目したことが特徴である。そのために、本実施形態では、干渉判定部と、符号制御部と、干渉分離部が必要なのである。
【0058】
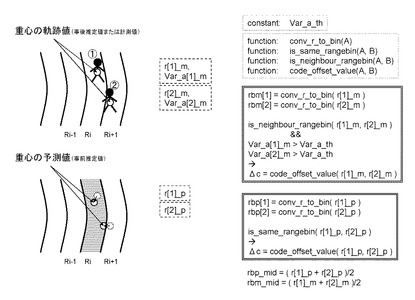
次に、干渉判定部116と符号制御部109について、詳細に説明する(干渉分離部は前述)。図6は、干渉判定部の判定手続き(関数)を示したものである。複数ある目標物体うち、判定に必要なのは2つずつであるため、説明では、2つの目標物体の例を説明する。これは、一般性を失うものではない。また、説明を単純化するため、2次元平面で事象として考える。
【0059】
追尾予測部115では、人間1、人間2のそれぞれ、下記のように表す。
距離の軌跡値(重心)である r[1]_m、r[2]_m、
距離の予測値(重心)である r[1]_p、r[2]_p、
角度(方位角)の軌跡値の分散(ここでは目標物体の構成する反射点群の空間的な分布を指す)である var_a[1]_m、var_a[2]_m
を計算することができる。
【0060】
また、干渉が起こっていないと判断するための角度分布の広がり限界値として、
角度許容分散Var_a_thを定めておく。
【0061】
さらに、距離あるいはレンジビン番号を複数入力として、同一レンジビンに存在するかどうかを判定し、出力する関数 is_same_rangebin、距離あるいはレンジビン番号を複数入力として、隣接するレンジビンに存在するかどうかを判定し、出力する関数 is_neighbour_rangebin、2つの目標物体の距離(重心)をそれぞれ入力として、符号の位相オフセット量を出力する関数 code_offset_valueを定義することができる。
【0062】
まず、追尾予測部115の軌跡値を見て、is_neighbour_rangebin(r[1]_m,r[2]_m)が真であり、かつ、Var_a[1]_m>Var_a_th、または、Var_a[2]_m>Var_a_thのとき、Δc_m=code_offset_value(r[1]_m,r[2]_m)を出力する。
【0063】
次に、追尾予測部の予測値を見て、is_same_rangebin(r[1]_p, r[2]_p)のとき、Δc_p=code_offset_value(r[1]_p, r[2]_p)を出力する。
【0064】
ここで、最終的な符号の位相オフセット量Δcとして、Δc_m、Δc_pがともにゼロのときは、Δc=0とする。
【0065】
Δc_pがゼロでないときは、Δc=Δc_p とする。それ以外のときは、Δc=Δc_mとする。
【0066】
レンジ制御信号は、この数値をバイトコードとしたものか、何らかの規則に基づいて制御コードに変換したものとすればよい。
【0067】
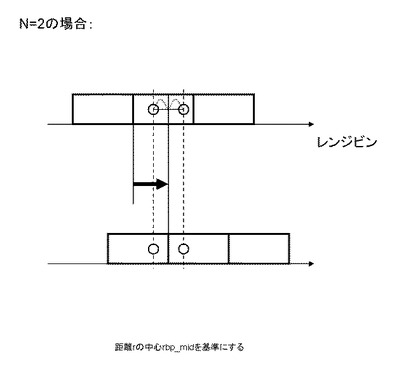
図7〜図9は、目標物体が多数存在する場合にどのようにΔcを決定するか、考えうるパターンについてその代表例を示している。このいくつかを組み合わせれば、どのような状況にも対応できると考えてよい。(ただし、本発明であっても完全に干渉を緩和できないような場面は除かれる)
図7は、目標物体の個数(Nとする)が2、すなわちN=2の場合を示している。この例では、code_offset_value(r[1]_p,r[2]_p)=o_control_value((r[1]_p+r[2]_p)/2 r[1]_p)、あるいは、code_offset_value(r[1]_p,r[2]_p)=to_control_value((r[1]_p+r[2]_p)/2r[2]_p)とした場合に相当する。
【0068】
関数to_control_valueは、符号の位相オフセット量を適切な数値に丸め、必要に応じて制御コードに変換する関数とする。
【0069】
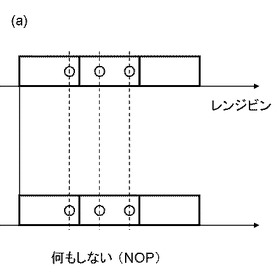
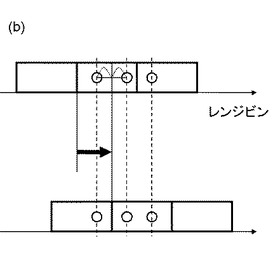
図8Aは、目標物体の個数Nが2より大きい場合であり、最も距離の短い位置の反射点(最短距離の反射点)のみ優先して処理するよう定めたものである。
【0070】
図8Aは、最短距離の反射点が独立して単独のレンジビンに収まっているので、何もしない(NOP)ことを示し、図8Bは、最短距離の反射点が他の反射点とともに同一のレンジビンに存在しているので、そのレンジビンに対して、図7にあるオフセット量の決定手法を適用することを示している。
【0071】
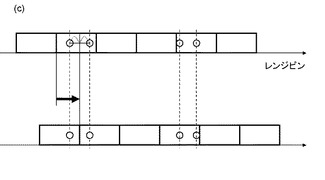
図8Cは、N=4の場合だが、この場合も最短距離の反射点のみについて判断すればよいことを示している。
【0072】
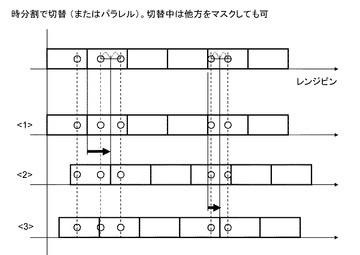
図9は、最短距離の反射点のみに着目するのではなく、干渉し得るすべての反射点に対して、交換的に処理を行う例を示したものである。
【0073】
交換的な処理とは、時分割で符号のオフセット量を切り替える場合や、すべてのオフセット量を並列的に処理して行う場合を意味する。あるいは、まったくランダムに切り替えてもよいし、最短距離を重点的に回数を割り当てるなどをしてもよい。
【0074】
図9では、N=5の反射点に対して、code_offset_value関数を計算しうる状況が3パターンあることから、その3パターンを交換的に行うための、符号オフセット量の決定方法を示している。
【0075】
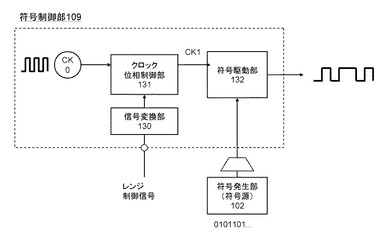
図10は、符号制御部109の内部を説明するブロック図である。
【0076】
符号制御部109は、送信用符号103、受信用符号104の一方に1チップ未満のオフセット(進みまたは遅れ)を付加できるようになっている。そのため、符号発生部102で生成する送信用符号103、受信用符号104の一方を予めマルチプレクサで選択し、それを符号制御部109の入力にする構成として説明する。
【0077】
なお、送信用符号103、受信用符号104のどちらにオフセットを付加するかは、レンジ制御信号などを使って、動的に選択変更可能となるように構成することができる。
符号制御部109は、符号用の基準駆動クロック(CK0)を備えている。
【0078】
基準駆動クロックCK0をクロック位相制御部131に入力すると、レンジ制御信号(クロック位相制御部が解釈できるように信号変換部130で変換したものも含む)の制御情報に応じ、基準クロックに対して0〜2πの位相差を有する移相駆動クロックCK1を生成することができる。このようなクロック位相制御部131としては、DLL(Delay−Locked Loop)あるいは、PLL(Phase−Locked Loop)などを用いることができる。
【0079】
この移相駆動クロックCK1を使って符号駆動部132を駆動することにより、必要な符号速度で、所望のオフセット量を有する拡散符号を生成することができる。
なお、レンジ制御信号としてNOPや0(ゼロ)を与えた場合、CK0とCK1は同位相となり、入力した基準符号に対してオフセットのない符号が生成されるものとする。
【0080】
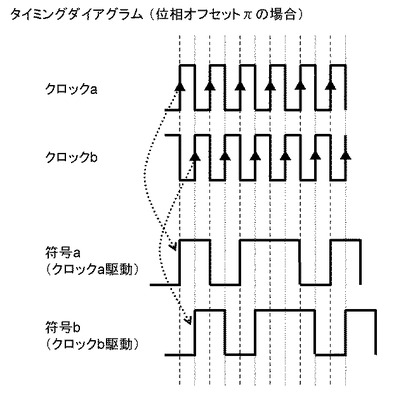
図11は、基準駆動クロックaと、それに対する位相差がπである移相駆動クロックbを用いれば、オフセット量が0.5チップ分異なる符号aと符号bをそれぞれ生成できることを示したチャートである。
【0081】
以上、本発明の実施形態1の構成によると、DOAの不定性を軽減できるレーダシステムを実現できる。
【0082】
(実施の形態2)
実施形態2は、実施形態1の構成と共通であるため、異なる部分についてのみ説明する。
【0083】
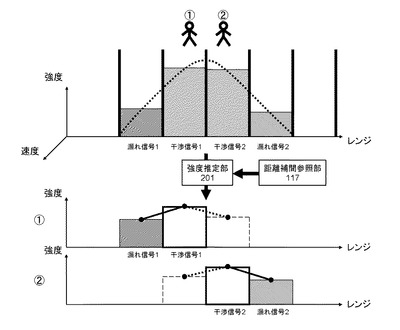
図12は、距離決定部111が有する距離補間参照部117を参照することで、漏れ信号の強度と、距離の軌跡値あるいは予測値とから、中央レンジの信号強度を推定する手段として、強度推定部201を備えていることを示している。
【0084】
レーダなど目標物体の散乱断面積と同程度の波長を有するセンサでは、反射点からの反射強度は、断面積や材質などの情報を含んでいる。そのため、実施形態1で実現した速度の分離に加え、強度をうまく分離できれば、レーダによる目標検知や追尾にとって非常に都合がよい。
【0085】
そこで、具体的には、人間1に対する漏れ信号と、人間1が存在する距離の予測値または軌跡値(補間あり)に対して、距離補間参照部117が有する、レンジ間における強度関係と反射点の正解位置の関係(テーブルや関数)を適用することで、人間1に対するピーク信号強度を推定できる。人間2に対しても同様である。
【0086】
このように、実施形態2によると、目標物体の信号強度を推定することができるため、目標物体上の各反射点の散乱断面積を推定したり、反射点の優位度(雑音と見なしてよいかなど)を判断する基準として用いたりすることが可能で、レーダによる検知精度や追尾精度が大きく向上する。
【0087】
(実施の形態3)
実施形態3は、実施形態1の構成と共通であるため、異なる部分についてのみ説明する。
実施形態の1や2のように、漏れ信号を使ってドップラースペクトルを評価する場合、漏れ信号のS/N比(信号対雑音比)が著しく小さいのが普通である。そのため、漏れ信号から速度データを抽出する場合は、検出閾値を下げるなどして、もれなく成分を抽出する必要がある。そして、漏れ信号で抽出した速度データをそのまま適用すると、雑音による無意味な速度データまで抽出されるため、結果として、その速度データを用いる方向検知部113では、無意味な方向データを出力するということになりかねない。
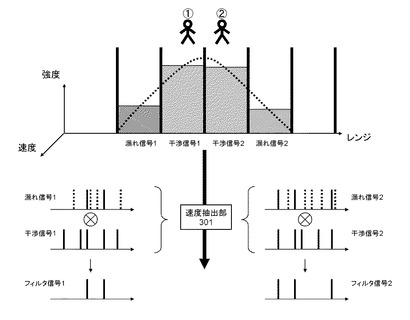
そこで、実施形態3では、漏れ信号の速度データの中から、雑音成分を効率的に落とす手段を提供し、そのための速度抽出部301を有している。
【0088】
図13は、人間1、人間2それぞれの漏れ信号の速度スペクトルに対して、干渉信号の速度スペクトルを乗算することにより、少なくとも漏れ信号の速度スペクトルに含まれる雑音に関しては、効率的に除去できる。
なぜなら、干渉信号の速度スペクトルには、干渉相手の速度データが含まれるかもしれないが、雑音成分はほとんどふくまれない。漏れ信号の速度スペクトルには、自身の速度データしか含まれない。したがって、両者を乗算することにより、雑音スペクトルのレベルを低減することができる。
【0089】
ただし、雑音スペクトルと干渉相手の速度スペクトルに共通成分がある場合は、除去できない。
【0090】
なお、上のようなスペクトル同士の演算をする場合、干渉信号のスペクトルおよび、漏れ信号のスペクトルをともに2値化(0・1)しておくとよい。その際の閾値はスペクトルの性質に応じて適切に設定するものとする。
【0091】
この場合の乗算はAND演算となる。そして、AND演算の結果(0・1)に応じて、干渉信号のスペクトルから速度成分を抽出すればよい。
このようにすることで、速度成分の要・不要をより明確に区別することができる。
【0092】
以上、実施形態3によると、信号レベルの低い漏れ信号を使った処理であっても、より効果的に干渉のない成分を抽出することができ、DOAの不定性の軽減性能を高めることができる。
【0093】
(実施の形態4)
実施形態4は、予めオフセット量の異なる複数の拡散符号(受信用符号)を生成するように構成しておき、後から最適のデータを選択するようにするものである。
【0094】
実施形態1などとは異なり、レンジ制御信号が符号制御部の内部で生成される点が異なる。
【0095】
実施形態4において、実施形態1などと異なる部分について、図面を用いて説明する。
【0096】
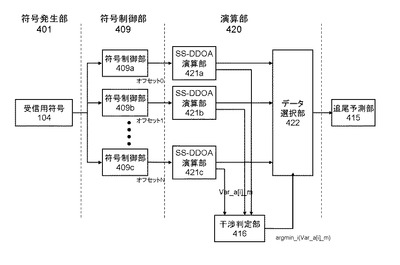
図14は、実施形態4におけるおおまかなデータフローを示したものである。
符号発生部401では位相の基準となる受信用符号104を生成する。
符号制御部409では受信用符号に対してオフセット(複数の並列)を付加する。
演算部402は、複数の受信用符号に対して並列に処理する必要があるため、受信回路における相関演算、距離決定、速度検知、方向検知、データ記憶を含むSS−DDOA演算部421と、その出力について、分布が最小となるものを選択することで干渉の程度を判断する干渉判定部416と、その干渉判定部416の判定出力に基づいて、SS−DDOA演算部421の出力から対応する1つを選択するデータ選択部422を有している。
追尾予測部415は、データ選択部422の出力を受けて、必要に応じて追尾予測を行う。
【0097】
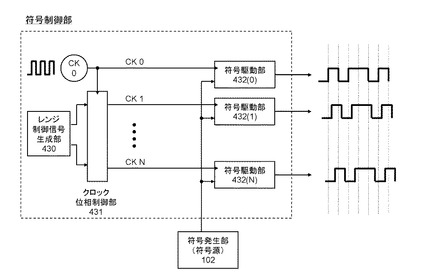
図15は、この実施形態4における符号制御部409の内部を説明するブロック図である。
【0098】
実施形態1などにおける符号制御部109(図10)とは異なり、レンジ制御信号生成部430で内的に生成したレンジ制御信号を使い、クロック位相制御部431における移相量をそれぞれ制御することで、基準駆動クロックCK0から、移相駆動クロックCK1,CK2、・・・・を生成することができる。
【0099】
レンジ制御信号は、予め駆動クロックの移相単位と生成クロック個数などをプリセットしたものと考えてよい。もちろん、レンジ制御信号生成部430は、外部から命令を受け入れられるようにしておいてもかまわない。
【0100】
基準駆動クロックと移相駆動クロックを使い、個々の符号駆動部432を駆動することで、位相オフセット量の異なる拡散符号を同時に生成することができる。
【0101】
実施形態1〜3のように追尾予測部の予測値を使って干渉判定を行っていると、特に多数の目標物体が存在し、干渉が極めて起こりやすい状況下では、予測結果そのものの誤差が拡大する。これは、干渉判定部の判定エラーの増加と直結するため、状況によっては意味を成さない場合もある。
【0102】
それに対して、実施形態4のようにすることで、予測の信頼性が低下する状況においても、より簡便にDOAの不定性を軽減することができる。
【産業上の利用可能性】
【0103】
本発明にかかる移動機器用レーダシステムは、移動機器に搭載し、被測定物の運動そのものを利用して被測定物の形状や速度を計測あるいは推定し、その結果を利用して移動機器の走行を制御する装置として有用である。また、据置型の移動体検知システムとしても利用できる。
【符号の説明】
【0104】
100 レーダシステム
101 フロントエンド部
102 符号発生部
103、103a 送信用符号
104、104a 受信用符号
105 送信回路
106 受信回路
107 送信アンテナ
108 受信アンテナ
109 符号制御部
110 干渉分離部
111 距離決定部
112 速度検知部
113 方向検知部
114 データ記憶部
115 追尾予測部
116 干渉判定部
150 目標物体
【技術分野】
【0001】
本発明は、移動物体を検知し、追尾するレーダ装置に関する。
【背景技術】
【0002】
近年、安全、快適に暮らせる住環境が重視されるようになり、日常生活において、人間の不審行動の監視や周囲に散在する危険からの回避を目的として、人間を検知してその移動を追尾することが必要な場合がある。また、多数の人間がそれぞれの意思で動き回っている空間の中で人共存型ロボットをうまく走行させるため、ロボットの周辺に存在する人間やその他の障害物をセンシングする必要がある。
【0003】
このようなシーンは、見通しのよい空間よりも、火災で煙の立ちこめた環境や夜間街灯のない暗闇、さらには壁を隔てた空間など、通常とは異なる条件で、より人間のセンシングが求められ、活用されると考えられる。
【0004】
すなわち、いかに劣悪な環境でも、人間をうまく検知し、その行動や移動軌跡を予測できることが必要である。
【0005】
そのような環境にも適用できるセンシング手段としては、ミリ波レーダなどの電波センサがある。レーダは相対速度と相対距離とを同時かつ瞬時に計測可能であることから、特に自動車用のセンシングシステムとして既に実用化されている。
物体が何であるのかをできる限り精度よく区別するためには、物体の運動の同定に必要な速度に加え、物体の形状の同定に必要な距離と角度を計測する方法がよい。
【0006】
そのようなレーダを用いて歩行者など人間の形状や運動を計測する試みとして、ドップラー(Doppler)シフトによる速度検知とDOA(Direction-of-Arrival)による到来方向検知とを組み合わせたDDOA(Doppler and Direction-of-Arrival)法と呼ばれる方法が知られている。(非特許文献1)
DDOA法によると、人間の腕や脚、胴体、頭部などの運動がスペクトルの微細な構造(マイクロドップラー)として観測可能であることから、その微細構造を分析、解析することによって、人間の検出あるいは人間の動作同定にも利用することができる。DDOA法では、人間とそれ以外とを区別することができるようになる。
ところで、一般的なDDOA法によると、観測可能な全範囲を対象としてドップラー信号処理およびDOA信号処理を行うため、さまざまな干渉を受けやすいという問題がある。
そのような場合、パルスドップラーレーダを用い、距離ゲート(レンジビン)を設けるという考え方がある。(例えば、特許文献1参照。)
従来例によると、モノパルスドップラレーダ装置1は、A/D変換部26からI信号ディジタル値、Q信号ディジタル値を入力してターゲットの距離、相対速度及び方位を算出するディジタル演算処理部として、主演算処理部30と高速演算が可能な補助演算処理部40の2つを備える構成としている。補助演算処理部40では、演算量が多いプリサム処理、FFT処理、及びターゲット判定処理を行わせ、主演算処理部30では、方位算出処理を行わせている。また、主演算処理部30における方位算出処理は、ターゲット判定処理でターゲットが検出された距離ゲートおよび周波数ゲートに対してのみ行わせるようにすることで、方位算出処理で行う演算量を大幅に低減している。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2010−230473号公報
【非特許文献】
【0008】
【非特許文献1】“Two−dimensional human tracking using a three−element Doppler and direction−of−arrival (DDOA) radar” Lin, A.; Ling, H., IEEE Radar Conference, April 2006.
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかしながら、従来の距離ゲートを有するレーダであるスペクトラム拡散方式とDDOA法に基づくレーダ装置によると、観測したいターゲットや観測範囲、観測周期に応じてレンジビンの幅を予め設計しておくことが前提であり、レーダの走査方法に関して、動的なパラメータ変更は想定されていない。
【0010】
さらに、単純にレンジビン幅を狭める(例えば1/2にする)とき、次のような問題点が考えられる。(1)電波の占有帯域幅が2倍となり、電波資源監理上の制限を受ける場合がある。(2)最大探知距離や最大観測速度、観測周期といった観測条件を確保するためには、信号のS/N比を3dB相当も犠牲にせざるを得ない。
【0011】
特に(2)については、DDOA法のように、散乱断面積の小さいものを見ようとしているシステムでは、S/N比の劣化が検知精度に与える影響が大きい。
【0012】
そこで、本発明は、前記従来の課題を鑑み、DDOA法に基づくレーダ装置においてDOAの不定性を軽減するためのレーダシステムを提供することを目的とする。
【課題を解決するための手段】
【0013】
前記従来の課題を解決するため、本発明のレーダ装置は、目標物体の距離を算出する距離決定部と、目標物体の方向を算出する方向検知部と、目標物体の相対速度を算出する速度検知部とを有するレーダシステムであって、前記距離決定部、方向検知部、速度検知部の出力を記憶するデータ記憶部と、前記データ記憶部の出力に基づいて目標物体の運動軌跡を予測する追尾予測部と、前記予測追尾部の出力及び、前記データ記憶部の出力に基づいてレンジの接近を判定し、レンジ制御信号を生成する干渉判定部と、前記レンジ制御信号に応じて送信用拡散符号、受信用拡散符号の一方に1チップ未満の位相オフセットを与える符号制御部と、前記レンジ制御信号に応じて干渉分離処理を行う干渉分離部とを備え、
前記干渉分離部は、レンジ制御信号に応じて、近接する目標物体の存在する当該レンジの信号または当該レンジに隣接するレンジの信号の一方を選択し、前記距離決定部、方向検知部、速度検知部の入力とすることを特徴とする。
【0014】
本構成によって、DDOA法に基づくレーダ装置においてDOAの不定性を軽減することができる。
【発明の効果】
【0015】
本発明の移動機器用レーダシステムによれば、DOAの不定性を軽減し、移動物体を安定に検知及び追尾可能なレーダシステムを実現することができる。
【図面の簡単な説明】
【0016】
【図1】本発明の実施形態1におけるレーダシステムの概略を表すブロック図
【図2】本発明で想定するレーダシステムと目標物体の構成を表す模式図
【図3】本発明で想定するDOA不定性の発現を説明するグラフ
【図4】スペクトラム拡散方式のレーダにおける、レンジ区切りと目標位置の推定を説明する模式図
【図5】本発明の実施形態1におけるレンジ区切りの効果を説明する模式図
【図6】本発明の実施形態1における干渉判定部の判定フローを説明する模式図
【図7】本発明の実施形態1におけるオフセット量の決定方法を表す模式図
【図8A】本発明の実施形態1におけるオフセット量の決定方法を表す模式図
【図8B】本発明の実施形態1におけるオフセット量の決定方法を表す模式図
【図8C】本発明の実施形態1におけるオフセット量の決定方法を表す模式図
【図9】本発明の実施形態1におけるオフセット量の決定方法を表す模式図
【図10】本発明の実施形態1における符号制御部の概略を表すブロック図
【図11】本発明の実施形態1における符号のオフセット量制御の概略を説明するタイミングを示す図
【図12】本発明の実施形態2の原理を説明する図
【図13】本発明の実施形態3の原理を説明する図
【図14】本発明の実施形態4におけるレーダシステムの概略の一部を表すブロック図
【図15】本発明の実施形態4における符号制御部の構成の概略を表すブロック図
【図16】従来のレーダシステムの概略図
【発明を実施するための形態】
【0017】
以下、本発明の実施の形態について、図面を参照しながら説明する。
【0018】
(実施の形態1)
図1は、本発明の実施形態1におけるレーダシステム100の概略を表すブロック図である。
レーダシステム100は、スペクトラム拡散レーダのフロントエンド部101と、符号制御部109と、距離決定部111と、速度検知部112と、方向検知部113と、データ記憶部114と、追尾予測部115と、干渉判定部116と、干渉分離部110と備える。
【0019】
スペクトラム拡散レーダのフロントエンド部101は、スペクトル拡散用の拡散符号(例えば、擬似雑音符号)として送信用符号103及び受信用符号104を生成する符号発生部102と、送信回路105と、受信回路106とを備える。送信回路105及び受信回路106は、それぞれ送信アンテナ107及び受信アンテナ108と接続されている。図1に、符合発生部102から符号制御部109に送信する送信用符号103及び受信用符号104と、符号制御部109から送信回路105に送信する送信用符号103aと、符号制御部109から受信回路106に送信する受信用符号104aを、便宜上記載している。
【0020】
なお、目標物体150の形状又は速度の分布を知るためには、2次元の平面または3次元の空間上の反射点の分布を計測する必要があるので、受信アンテナ108は少なくとも2つ設置することが好ましい。それに応じて受信回路106についても併置しておくことが好ましい。
【0021】
(符号発生部102)
符号発生部102は、送信用符号103及び受信用符号104を発生する。送信用符号103及び受信用符号104は、同一の生成多項式により生成された擬似雑音符号である。
【0022】
例えば、よく知られたスペクトラム拡散レーダの構成のように、受信用符号は送信用符号を1チップ単位で順次遅延できるようにしてあって、これを用いて送信波と反射波との相関演算を行い、距離を算出する。この相関演算の結果、距離は離散的に算出され、1チップに相当する長さ(例えば、符号速度が250Mcpsの場合60cm)が距離の分解能となる。
【0023】
以下、相関演算後の信号を、レーダ受信信号と呼ぶ。レーダ受信信号は、受信チャネルの数だけ存在する。1チャネルあたりのレーダ受信信号は、複素信号である。複素信号は、同相の成分(I相という)とそれに直交する成分(Q相という)とを含む。
【0024】
実際の距離の決定は、受信回路での相関演算の後、距離決定部111において実施される。距離決定部111では、レンジビン単位で離散的にしか計測できない距離に対して補間演算を行うことにより、レンジビン内の詳細な距離を推定する。距離決定部111の出力はデータ記憶部114に格納される。
【0025】
補間演算の方法としては、一般的な1次元フーリエ補間による方法以外にも、補間テーブルを参照する方法、補間テーブルを近似曲線で表した補間関数を適用する方法を用いることができる。
【0026】
この補間演算のため、距離決定部111は、予め定める距離補間の関係117を有していることが好ましい。
【0027】
速度検知部112は、レーダ受信信号の周波数を解析する。例えば、ドップラー信号処理を用いる。具体的には、速度検知部112は、高速フーリエ変換(Fast Fourier Transform,FFT)により、レーダ受信信号の周波数を解析する。この速度検知部112は、反射波のドップラースペクトルを解析し、必要に応じてスペクトルのピークとその位相、そのドップラー周波数を抽出する。速度検知部112は、ドップラー周波数を予め定めた係数で演算し、速度に変換する。速度検知部112は、データ記憶部114に格納される。
【0028】
方向検知部113は、速度検知部112で得られたドップラースペクトル(パワー特性と位相特性)について、各受信チャネル間で位相特性の差分を演算(DOA信号処理)することにより、反射点の方向を算定する。受信チャネルが2の場合、方向は一次元(例えば、方位角のみ)、受信チャネルが3の場合、方向は2次元(例えば、方位角と仰角)である。なお、受信チャネルとは、受信アンテナ、受信回路の系統を指す。方向検知部113の出力は、データ記憶部に格納される。
【0029】
このように、データ記憶部114には、速度、距離、方向のデータが格納されている。距離と方向は位置を示すことから、データ記憶部114には速度と位置とが適切に関連付けられて格納されており、必要に応じて取り出すことができる。
【0030】
追尾予測部115は、データ記憶部114に格納された、速度と位置の情報を使って、分布する反射点の代表点を決定したり、クラスタリングを行って目標物体の個数を管理したり、代表点の情報をカルマンフィルタに入力し、目標物体の移動軌跡を予測も含めて計算したりする。
【0031】
追尾予測部115の出力(追尾出力)は、予測フィルタによる事前推定値(ここでは予測値という)、事後推定値(ここでは軌跡値という)である。追尾出力は、位置(距離と方向)、速度(視線方向と接線方向)を含む。
なお、軌跡値として、事後推定値の変わりに計測値そのものを用いてもよい。
【0032】
図2は、受信アンテナを3つ設けたレーダシステムを用いて、人間2人を検知し、追尾する状況を想定した模式図である。受信アンテナをそれぞれ受信アンテナ108a、108b、108cとし、それらをまとめて受信アンテナ108と表記することがある。
【0033】
3つの受信アンテナ108を互いの方向が独立となるように(ここでは直交するように)設置しているため、反射点の水平方向(すなわち方位角)、鉛直方向(すなわち仰角)、その相対速度を計測することができる。
【0034】
例えば、運動速度V(視線方向のスカラー量)と位置S(空間座標のベクトル量)を<V,S>と表すことにすると、人間151と人間152の頭部、腕、反対側の腕、脚、反対側の脚は、それぞれ、<V11,S11>、<V12,S12>、<V13,S13>、<V14,S14>、<V15,S15>、および、<V21,S21>、<V22,S22>、<V23,S23>、<V24,S24>、<V25,S25>として正しく観測することができる。実際の観測では、さらに細かい運動状態を取得可能であるが、模式図では簡略化している。
【0035】
図3(a)及び図3(b)は、人間2人の場合、観測結果の見え方について、数値計算で検証したグラフである。図3(a)は、人間1と人間2とが、少なくとも1レンジビン以上離れている場合、同3(b)は、人間1と人間2とが、同一レンジビンに存在する場合を示している。図3では、3次元の<V,S>の分布を2次元平面に投影した結果を示しており、各点が反射点に対応している。
【0036】
図3(a)のように、複数の人間がそれぞれ異なるレンジビンに存在する場合、人間1と人間2は、分布のまとまりが明確であるため、容易にクラスタリングできる。
ところが、図3(b)のように、複数の人間の存在する領域が同一レンジビンになった途端に、<V,S>の分布が大きく広がり、クラスタリングが困難になる。これが、DOAの不定と呼んでいる現象の発現である。
【0037】
DOA不定が発現した状況を、ここでは「速度干渉」、あるいは単純に「干渉」と表現する。干渉は、上述の通り、同一のレンジビンに複数の速度成分を有する目標物体が存在する場合に発生する可能性がある。ところが実際は、目標物体の受信相関出力は、その隣接するレンジでもゼロにはならず、目標物体の存在するレンジ内の距離に依存することがわかっている。ここでは、これを「漏れ信号」と呼び、距離決定部における距離補間演算でも積極的に利用されている。
【0038】
したがって、干渉の影響は、レンジビン1つ分に限らず、レンジビン2つ分でも発生する可能性が十分にあり、干渉の影響を排除するには、一般に複数の目標物体が2レンジビン以上離れていることが必要である。
【0039】
ここで、実施形態1では、干渉判定部116、符号制御部109、干渉分離部110を有していることから、DOA不定を軽減することができる。予め各ブロックの機能をまず簡単に説明し、詳細は後述する。
【0040】
干渉判定部116は、追尾予測部115の出力と、データ記憶部114の出力を使い、複数の目標物体が干渉を起こしうる範囲に存在するかどうかを判定し、レンジ制御信号を出力する。
【0041】
符号制御部109は、レンジ制御信号に基づいて、符号発生部102で生成した送信用符号103、受信用符号104の一方に、1チップ未満の位相オフセットを与える。符号制御部を通した拡散符号をそれぞれ送信用符号103a、受信用符号104aとして区別するが、少なくとも一方はオフセットが付加されていない。
【0042】
干渉分離部110は、レンジ制御信号に基づいて、信号の干渉成分を除去する処理を行う。この際、距離決定部111では、レンジ制御信号に基づいて、付与された位相オフセットに相当する距離を補正する機能を有することを加えておく。
【0043】
発明の原理について、図4〜図5を用い、干渉分離部110の機能を詳細に記述することで説明する。
【0044】
図4は、目標物体が1つ(1人)の場合のレーダ受信信号の波形の模式図である。図4(a)は、目標物体が存在するとき、あるドップラー速度におけるレンジ方向の強度分布、すなわち、波形を表している。ドップラー速度のうちの1つを取り出して表示しているが、実際には、目標物体が有する速度に応じて、同図と同様な波形を対応するドップラー速度に対しても描くことができる。
【0045】
この模式波形において柱状に表したものは、理想的な「矩形応答波形」である。実際はこのような理想的な波形にはならず、インパルス応答の重ね合わせになるが、便宜上、矩形応答波形によって説明する。
【0046】
この矩形応答波形からもわかるように、目標物体が存在するレンジのみならず、それに隣接するレンジもある程度の信号強度を有している。これが漏れ信号と表現したものである。
【0047】
漏れ信号も含め、各レンジの矩形応答波形における中央部分を結ぶように曲線を形成した「ガイド波形」も、合わせて表示している。
【0048】
ガイド波形は、1次元のフーリエ補間などの補間手段によって得られるフィルタ波形であると考えてよい。ガイド波形のピーク位置のレンジ座標はその反射点の距離と考えることができ、レンジ内の距離を精度よく推定できるのはこのためである。
【0049】
また、ひとつの目標物体に対して矩形応答波形の強度がゼロでない部分を、中央レンジとそれに隣接するレンジの3レンジ分しか考慮していないが、さらに外側(隣隣接)のレンジの信号強度は一般に十分小さく、考えなくてもよい。
【0050】
逆に、3レンジ分のみを考えればよいように、レンジビン幅を設定しておくことが好ましい。具体的には、目標物体が主に人間である場合には、レンジビン幅を人幅程度に設定しておくとよい。さらに具体的には、符号速度を250Mcpsとし、レンジビン幅を60cmとするとなお好ましい。(この数値は、想定される利用シーンの要求から定まるスペックと矛盾しない)
ここで同図(b)のように、レンジの区切り位置が同図(a)と異なる場合を考える。同図(b)では、レンジ区切りをレンジビン幅の1/2分だけ、遠方へシフトさせたものである。
【0051】
この結果、矩形応答波形の形状は、同図(a)の場合とは異なったものとなる。ところが、このガイド波形は、同図(a)と(b)でほぼ同様のものになる。言い換えれば、もともとガイド波形が存在し、それをいかにサンプリングするかが異なっているだけである。
このことから、レンジの区切り位置すなわち符号の位相オフセット量は、目標物体の位置の同定には影響を与えない、ということを確認できる。
【0052】
続いて、図5は、2つの目標物体が近接して存在する場合の波形を示したものである。
なお、速度干渉の起こりうる状態を「干渉予備状態」とし、干渉予備状態における目標物体は、「近接」している、と呼ぶことにする。
【0053】
同図(a)、(b)でもガイド波形は同一であるが、(a)では、同一レンジビン内に人間1、人間2が同時に存在し、干渉が極めて起こりやすい状況になっている一方、同図(b)では、人間1、人間2は隣接しているものの異なるレンジに分離されている。
【0054】
なお、干渉が緩和された結果、各ドップラー速度における波形が、符号の位相オフセットによって変化する場合があるが、ここでは波形は変化しないものとして考える。
【0055】
この図5において、矩形応答波形の人間1の成分と人間2の成分と表示を変えて図示しているが、積層された矩形応答波形は、実際には受信の段階で既に混合され、分離することはできないことを強調しておく。
【0056】
ここで、同図(b)において、最外部にある2つのレンジに着目すると、そこには漏れ信号のみが存在することがわかる。その内側の積層された矩形応答波形(ただしくは、混合された矩形応答波形)とは意義が全く異なる。目標物体が同一レンジビンに入りそうな状況で、レンジ区切りを変更できれば、この漏れ信号をドップラー信号処理、DOA信号処理に適用することができる。
【0057】
干渉分離部は、おもにこの漏れ信号を有効に抽出する処理を行うブロックである。本実施形態1はこの最外部の漏れ信号に着目したことが特徴である。そのために、本実施形態では、干渉判定部と、符号制御部と、干渉分離部が必要なのである。
【0058】
次に、干渉判定部116と符号制御部109について、詳細に説明する(干渉分離部は前述)。図6は、干渉判定部の判定手続き(関数)を示したものである。複数ある目標物体うち、判定に必要なのは2つずつであるため、説明では、2つの目標物体の例を説明する。これは、一般性を失うものではない。また、説明を単純化するため、2次元平面で事象として考える。
【0059】
追尾予測部115では、人間1、人間2のそれぞれ、下記のように表す。
距離の軌跡値(重心)である r[1]_m、r[2]_m、
距離の予測値(重心)である r[1]_p、r[2]_p、
角度(方位角)の軌跡値の分散(ここでは目標物体の構成する反射点群の空間的な分布を指す)である var_a[1]_m、var_a[2]_m
を計算することができる。
【0060】
また、干渉が起こっていないと判断するための角度分布の広がり限界値として、
角度許容分散Var_a_thを定めておく。
【0061】
さらに、距離あるいはレンジビン番号を複数入力として、同一レンジビンに存在するかどうかを判定し、出力する関数 is_same_rangebin、距離あるいはレンジビン番号を複数入力として、隣接するレンジビンに存在するかどうかを判定し、出力する関数 is_neighbour_rangebin、2つの目標物体の距離(重心)をそれぞれ入力として、符号の位相オフセット量を出力する関数 code_offset_valueを定義することができる。
【0062】
まず、追尾予測部115の軌跡値を見て、is_neighbour_rangebin(r[1]_m,r[2]_m)が真であり、かつ、Var_a[1]_m>Var_a_th、または、Var_a[2]_m>Var_a_thのとき、Δc_m=code_offset_value(r[1]_m,r[2]_m)を出力する。
【0063】
次に、追尾予測部の予測値を見て、is_same_rangebin(r[1]_p, r[2]_p)のとき、Δc_p=code_offset_value(r[1]_p, r[2]_p)を出力する。
【0064】
ここで、最終的な符号の位相オフセット量Δcとして、Δc_m、Δc_pがともにゼロのときは、Δc=0とする。
【0065】
Δc_pがゼロでないときは、Δc=Δc_p とする。それ以外のときは、Δc=Δc_mとする。
【0066】
レンジ制御信号は、この数値をバイトコードとしたものか、何らかの規則に基づいて制御コードに変換したものとすればよい。
【0067】
図7〜図9は、目標物体が多数存在する場合にどのようにΔcを決定するか、考えうるパターンについてその代表例を示している。このいくつかを組み合わせれば、どのような状況にも対応できると考えてよい。(ただし、本発明であっても完全に干渉を緩和できないような場面は除かれる)
図7は、目標物体の個数(Nとする)が2、すなわちN=2の場合を示している。この例では、code_offset_value(r[1]_p,r[2]_p)=o_control_value((r[1]_p+r[2]_p)/2 r[1]_p)、あるいは、code_offset_value(r[1]_p,r[2]_p)=to_control_value((r[1]_p+r[2]_p)/2r[2]_p)とした場合に相当する。
【0068】
関数to_control_valueは、符号の位相オフセット量を適切な数値に丸め、必要に応じて制御コードに変換する関数とする。
【0069】
図8Aは、目標物体の個数Nが2より大きい場合であり、最も距離の短い位置の反射点(最短距離の反射点)のみ優先して処理するよう定めたものである。
【0070】
図8Aは、最短距離の反射点が独立して単独のレンジビンに収まっているので、何もしない(NOP)ことを示し、図8Bは、最短距離の反射点が他の反射点とともに同一のレンジビンに存在しているので、そのレンジビンに対して、図7にあるオフセット量の決定手法を適用することを示している。
【0071】
図8Cは、N=4の場合だが、この場合も最短距離の反射点のみについて判断すればよいことを示している。
【0072】
図9は、最短距離の反射点のみに着目するのではなく、干渉し得るすべての反射点に対して、交換的に処理を行う例を示したものである。
【0073】
交換的な処理とは、時分割で符号のオフセット量を切り替える場合や、すべてのオフセット量を並列的に処理して行う場合を意味する。あるいは、まったくランダムに切り替えてもよいし、最短距離を重点的に回数を割り当てるなどをしてもよい。
【0074】
図9では、N=5の反射点に対して、code_offset_value関数を計算しうる状況が3パターンあることから、その3パターンを交換的に行うための、符号オフセット量の決定方法を示している。
【0075】
図10は、符号制御部109の内部を説明するブロック図である。
【0076】
符号制御部109は、送信用符号103、受信用符号104の一方に1チップ未満のオフセット(進みまたは遅れ)を付加できるようになっている。そのため、符号発生部102で生成する送信用符号103、受信用符号104の一方を予めマルチプレクサで選択し、それを符号制御部109の入力にする構成として説明する。
【0077】
なお、送信用符号103、受信用符号104のどちらにオフセットを付加するかは、レンジ制御信号などを使って、動的に選択変更可能となるように構成することができる。
符号制御部109は、符号用の基準駆動クロック(CK0)を備えている。
【0078】
基準駆動クロックCK0をクロック位相制御部131に入力すると、レンジ制御信号(クロック位相制御部が解釈できるように信号変換部130で変換したものも含む)の制御情報に応じ、基準クロックに対して0〜2πの位相差を有する移相駆動クロックCK1を生成することができる。このようなクロック位相制御部131としては、DLL(Delay−Locked Loop)あるいは、PLL(Phase−Locked Loop)などを用いることができる。
【0079】
この移相駆動クロックCK1を使って符号駆動部132を駆動することにより、必要な符号速度で、所望のオフセット量を有する拡散符号を生成することができる。
なお、レンジ制御信号としてNOPや0(ゼロ)を与えた場合、CK0とCK1は同位相となり、入力した基準符号に対してオフセットのない符号が生成されるものとする。
【0080】
図11は、基準駆動クロックaと、それに対する位相差がπである移相駆動クロックbを用いれば、オフセット量が0.5チップ分異なる符号aと符号bをそれぞれ生成できることを示したチャートである。
【0081】
以上、本発明の実施形態1の構成によると、DOAの不定性を軽減できるレーダシステムを実現できる。
【0082】
(実施の形態2)
実施形態2は、実施形態1の構成と共通であるため、異なる部分についてのみ説明する。
【0083】
図12は、距離決定部111が有する距離補間参照部117を参照することで、漏れ信号の強度と、距離の軌跡値あるいは予測値とから、中央レンジの信号強度を推定する手段として、強度推定部201を備えていることを示している。
【0084】
レーダなど目標物体の散乱断面積と同程度の波長を有するセンサでは、反射点からの反射強度は、断面積や材質などの情報を含んでいる。そのため、実施形態1で実現した速度の分離に加え、強度をうまく分離できれば、レーダによる目標検知や追尾にとって非常に都合がよい。
【0085】
そこで、具体的には、人間1に対する漏れ信号と、人間1が存在する距離の予測値または軌跡値(補間あり)に対して、距離補間参照部117が有する、レンジ間における強度関係と反射点の正解位置の関係(テーブルや関数)を適用することで、人間1に対するピーク信号強度を推定できる。人間2に対しても同様である。
【0086】
このように、実施形態2によると、目標物体の信号強度を推定することができるため、目標物体上の各反射点の散乱断面積を推定したり、反射点の優位度(雑音と見なしてよいかなど)を判断する基準として用いたりすることが可能で、レーダによる検知精度や追尾精度が大きく向上する。
【0087】
(実施の形態3)
実施形態3は、実施形態1の構成と共通であるため、異なる部分についてのみ説明する。
実施形態の1や2のように、漏れ信号を使ってドップラースペクトルを評価する場合、漏れ信号のS/N比(信号対雑音比)が著しく小さいのが普通である。そのため、漏れ信号から速度データを抽出する場合は、検出閾値を下げるなどして、もれなく成分を抽出する必要がある。そして、漏れ信号で抽出した速度データをそのまま適用すると、雑音による無意味な速度データまで抽出されるため、結果として、その速度データを用いる方向検知部113では、無意味な方向データを出力するということになりかねない。
そこで、実施形態3では、漏れ信号の速度データの中から、雑音成分を効率的に落とす手段を提供し、そのための速度抽出部301を有している。
【0088】
図13は、人間1、人間2それぞれの漏れ信号の速度スペクトルに対して、干渉信号の速度スペクトルを乗算することにより、少なくとも漏れ信号の速度スペクトルに含まれる雑音に関しては、効率的に除去できる。
なぜなら、干渉信号の速度スペクトルには、干渉相手の速度データが含まれるかもしれないが、雑音成分はほとんどふくまれない。漏れ信号の速度スペクトルには、自身の速度データしか含まれない。したがって、両者を乗算することにより、雑音スペクトルのレベルを低減することができる。
【0089】
ただし、雑音スペクトルと干渉相手の速度スペクトルに共通成分がある場合は、除去できない。
【0090】
なお、上のようなスペクトル同士の演算をする場合、干渉信号のスペクトルおよび、漏れ信号のスペクトルをともに2値化(0・1)しておくとよい。その際の閾値はスペクトルの性質に応じて適切に設定するものとする。
【0091】
この場合の乗算はAND演算となる。そして、AND演算の結果(0・1)に応じて、干渉信号のスペクトルから速度成分を抽出すればよい。
このようにすることで、速度成分の要・不要をより明確に区別することができる。
【0092】
以上、実施形態3によると、信号レベルの低い漏れ信号を使った処理であっても、より効果的に干渉のない成分を抽出することができ、DOAの不定性の軽減性能を高めることができる。
【0093】
(実施の形態4)
実施形態4は、予めオフセット量の異なる複数の拡散符号(受信用符号)を生成するように構成しておき、後から最適のデータを選択するようにするものである。
【0094】
実施形態1などとは異なり、レンジ制御信号が符号制御部の内部で生成される点が異なる。
【0095】
実施形態4において、実施形態1などと異なる部分について、図面を用いて説明する。
【0096】
図14は、実施形態4におけるおおまかなデータフローを示したものである。
符号発生部401では位相の基準となる受信用符号104を生成する。
符号制御部409では受信用符号に対してオフセット(複数の並列)を付加する。
演算部402は、複数の受信用符号に対して並列に処理する必要があるため、受信回路における相関演算、距離決定、速度検知、方向検知、データ記憶を含むSS−DDOA演算部421と、その出力について、分布が最小となるものを選択することで干渉の程度を判断する干渉判定部416と、その干渉判定部416の判定出力に基づいて、SS−DDOA演算部421の出力から対応する1つを選択するデータ選択部422を有している。
追尾予測部415は、データ選択部422の出力を受けて、必要に応じて追尾予測を行う。
【0097】
図15は、この実施形態4における符号制御部409の内部を説明するブロック図である。
【0098】
実施形態1などにおける符号制御部109(図10)とは異なり、レンジ制御信号生成部430で内的に生成したレンジ制御信号を使い、クロック位相制御部431における移相量をそれぞれ制御することで、基準駆動クロックCK0から、移相駆動クロックCK1,CK2、・・・・を生成することができる。
【0099】
レンジ制御信号は、予め駆動クロックの移相単位と生成クロック個数などをプリセットしたものと考えてよい。もちろん、レンジ制御信号生成部430は、外部から命令を受け入れられるようにしておいてもかまわない。
【0100】
基準駆動クロックと移相駆動クロックを使い、個々の符号駆動部432を駆動することで、位相オフセット量の異なる拡散符号を同時に生成することができる。
【0101】
実施形態1〜3のように追尾予測部の予測値を使って干渉判定を行っていると、特に多数の目標物体が存在し、干渉が極めて起こりやすい状況下では、予測結果そのものの誤差が拡大する。これは、干渉判定部の判定エラーの増加と直結するため、状況によっては意味を成さない場合もある。
【0102】
それに対して、実施形態4のようにすることで、予測の信頼性が低下する状況においても、より簡便にDOAの不定性を軽減することができる。
【産業上の利用可能性】
【0103】
本発明にかかる移動機器用レーダシステムは、移動機器に搭載し、被測定物の運動そのものを利用して被測定物の形状や速度を計測あるいは推定し、その結果を利用して移動機器の走行を制御する装置として有用である。また、据置型の移動体検知システムとしても利用できる。
【符号の説明】
【0104】
100 レーダシステム
101 フロントエンド部
102 符号発生部
103、103a 送信用符号
104、104a 受信用符号
105 送信回路
106 受信回路
107 送信アンテナ
108 受信アンテナ
109 符号制御部
110 干渉分離部
111 距離決定部
112 速度検知部
113 方向検知部
114 データ記憶部
115 追尾予測部
116 干渉判定部
150 目標物体
【特許請求の範囲】
【請求項1】
目標物体の距離を算出する距離決定部と、
目標物体の方向を算出する方向検知部と、
目標物体の相対速度を算出する速度検知部と、
前記距離決定部、方向検知部、速度検知部の出力を記憶するデータ記憶部と、
前記データ記憶部の出力に基づいて目標物体の運動軌跡を予測する追尾予測部と、
前記予測追尾部の出力及び、前記データ記憶部の出力に基づいてレンジの接近を判定し、レンジ制御信号を生成する干渉判定部と、
前記レンジ制御信号に応じて送信用拡散符号、受信用拡散符号の一方に1チップ未満の位相オフセットを与える符号制御部と、
前記レンジ制御信号に応じて干渉分離処理を行う干渉分離部とを備え、
前記干渉分離部は、レンジ制御信号に応じて、近接する目標物体の存在する当該レンジの信号または当該レンジに隣接するレンジの信号の一方を選択し、前記距離決定部、方向検知部、速度検知部の入力とする、
速度干渉の軽減方法それを用いたレーダ装置。
【請求項2】
前記距離決定部は、レンジ及びその隣接レンジの強度関係に基づいてレンジビン幅内の距離を補間する距離補間参照部を有し、
前記干渉分離部は、前記距離補間参照部を参照し、前記当該レンジに隣接する信号の信号強度から前記当該レンジの信号の信号強度を算出する強度推定部をさらに備える、請求項1記載のレーダ装置。
【請求項3】
近接する目標物体のうち、2つ目標物体の距離の平均値を用いて前記位相オフセット量を決定する、
請求項1又は2に記載の速度干渉の軽減方法それを用いたレーダ装置。
【請求項4】
距離最小の目標物体を含む近接する目標物体に対して前記位相オフセット量を決定する、
請求項1から3のいずれか1つに記載のレーダ装置。
【請求項5】
前記干渉判定部は複数のレンジ制御信号を生成し、前記複数のレンジ制御信号に基づいて前記位相オフセット量を切り替える、
請求項1から4のいずれか1つに記載のレーダ装置。
【請求項6】
前記干渉分離部は、前記当該レンジの信号の速度スペクトル(ドップラースペクトル)と前記当該レンジに隣接するレンジの信号の速度スペクトルを演算する速度抽出部をさらに備え、
前記速度演算部の出力を前記当該レンジに含まれる目標物体の速度スペクトルの一方として出力する、
請求項1から5のいずれか1つに記載のレーダ装置。
【請求項7】
前記符号制御部は位相オフセット量の異なる複数の受信用拡散符号を同時に生成し、複数備えた前記距離決定部、方向検知部、速度検知部にそれぞれ位相オフセット量の異なる受信用拡散符号を供給する、
請求項1記載のレーダ装置。
【請求項8】
前記レンジビン幅が人間の幅と同程度である、
請求項1から7のいずれか1つに記載の速度干渉の軽減方法それを用いたレーダ装置。
【請求項1】
目標物体の距離を算出する距離決定部と、
目標物体の方向を算出する方向検知部と、
目標物体の相対速度を算出する速度検知部と、
前記距離決定部、方向検知部、速度検知部の出力を記憶するデータ記憶部と、
前記データ記憶部の出力に基づいて目標物体の運動軌跡を予測する追尾予測部と、
前記予測追尾部の出力及び、前記データ記憶部の出力に基づいてレンジの接近を判定し、レンジ制御信号を生成する干渉判定部と、
前記レンジ制御信号に応じて送信用拡散符号、受信用拡散符号の一方に1チップ未満の位相オフセットを与える符号制御部と、
前記レンジ制御信号に応じて干渉分離処理を行う干渉分離部とを備え、
前記干渉分離部は、レンジ制御信号に応じて、近接する目標物体の存在する当該レンジの信号または当該レンジに隣接するレンジの信号の一方を選択し、前記距離決定部、方向検知部、速度検知部の入力とする、
速度干渉の軽減方法それを用いたレーダ装置。
【請求項2】
前記距離決定部は、レンジ及びその隣接レンジの強度関係に基づいてレンジビン幅内の距離を補間する距離補間参照部を有し、
前記干渉分離部は、前記距離補間参照部を参照し、前記当該レンジに隣接する信号の信号強度から前記当該レンジの信号の信号強度を算出する強度推定部をさらに備える、請求項1記載のレーダ装置。
【請求項3】
近接する目標物体のうち、2つ目標物体の距離の平均値を用いて前記位相オフセット量を決定する、
請求項1又は2に記載の速度干渉の軽減方法それを用いたレーダ装置。
【請求項4】
距離最小の目標物体を含む近接する目標物体に対して前記位相オフセット量を決定する、
請求項1から3のいずれか1つに記載のレーダ装置。
【請求項5】
前記干渉判定部は複数のレンジ制御信号を生成し、前記複数のレンジ制御信号に基づいて前記位相オフセット量を切り替える、
請求項1から4のいずれか1つに記載のレーダ装置。
【請求項6】
前記干渉分離部は、前記当該レンジの信号の速度スペクトル(ドップラースペクトル)と前記当該レンジに隣接するレンジの信号の速度スペクトルを演算する速度抽出部をさらに備え、
前記速度演算部の出力を前記当該レンジに含まれる目標物体の速度スペクトルの一方として出力する、
請求項1から5のいずれか1つに記載のレーダ装置。
【請求項7】
前記符号制御部は位相オフセット量の異なる複数の受信用拡散符号を同時に生成し、複数備えた前記距離決定部、方向検知部、速度検知部にそれぞれ位相オフセット量の異なる受信用拡散符号を供給する、
請求項1記載のレーダ装置。
【請求項8】
前記レンジビン幅が人間の幅と同程度である、
請求項1から7のいずれか1つに記載の速度干渉の軽減方法それを用いたレーダ装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8A】
【図8B】
【図8C】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8A】
【図8B】
【図8C】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2013−96887(P2013−96887A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−240938(P2011−240938)
【出願日】平成23年11月2日(2011.11.2)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年11月2日(2011.11.2)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]