
レーダ計測システム
【課題】レーダ装置を用いて移動体の角速度を算出する「レーダ計測システム」を提供する。
【解決手段】レーダ装置で検出した、同一物体上の点である可能性が認められる程度に近接している二つの検出点a、bの、地面に対する速度ベクトルva、vbを求め、検出点aの位置paを通り速度ベクトルvaと垂直な直線と、検出点bの位置pbを通り速度ベクトルvbと垂直な直線との交点を仮想中心点Oとし、位置paから速度ベクトルvaで単位時間進んだ相対位置qaと、位置pbから速度ベクトルvbで単位時間進んだ相対位置qbを求め、pa-O-qaの角度θaを検出点aの角速度、pb-O-qbの角度θbを検出点bの角速度として求める。そして、両角速度が近似していれば、強検出点に、bに、求めた二つの角速度の平均値を角速度として設定する。
【解決手段】レーダ装置で検出した、同一物体上の点である可能性が認められる程度に近接している二つの検出点a、bの、地面に対する速度ベクトルva、vbを求め、検出点aの位置paを通り速度ベクトルvaと垂直な直線と、検出点bの位置pbを通り速度ベクトルvbと垂直な直線との交点を仮想中心点Oとし、位置paから速度ベクトルvaで単位時間進んだ相対位置qaと、位置pbから速度ベクトルvbで単位時間進んだ相対位置qbを求め、pa-O-qaの角度θaを検出点aの角速度、pb-O-qbの角度θbを検出点bの角速度として求める。そして、両角速度が近似していれば、強検出点に、bに、求めた二つの角速度の平均値を角速度として設定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、レーダ装置を用いて移動体を計測する技術に関するものである。
【背景技術】
【0002】
レーダ装置を用いて移動体を計測する技術としては、レーダ装置に対する物体の相対位置の他に、物体の反射波に生じたドップラシフト量が表す物体のレーダ装置に対して遠近する方向の速度成分を測定する技術が知られている。
また、このようなレーダ装置を用いて移動体を計測する技術としては、レーダ装置が計測した複数の物体の位置のうち、相互に所定レベル以上近接する位置は、同じ移動体について計測された位置であるとして、当該移動体の位置を計測する技術が知られている(たとえば、特許文献1)。
【特許文献1】特開平11-72557号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
レーダ装置を用いた従来の計測の技術によれば、レーダ装置に対して遠近する方向の速度成分しか測定することができず、物体の角速度などを測定することができなかった。そして、このために、物体のレーダ装置に対する相対的な運動を正しく計測することができなかった。
【0004】
また、前述した特許文献1の技術によれば、近接した併走する2つの移動体に対してレーダ装置が計測した複数の位置の全てを、単一の移動体上の位置として誤検出してしまうことがあった。また、この結果、一方の移動体の存在の検出漏れが生じてしまう場合があった。
【0005】
そこで、本発明は、レーダ装置を用いて物体のレーダ装置に対する相対的な運動をより正しく計測することを課題とする。
また、併せて、本発明は、物体毎に、当該物体についてレーダ装置で計測した位置を、精度良く弁別することを課題とする。
【課題を解決するための手段】
【0006】
前記課題達成のために、本発明は、レーダを用いて移動体を計測するレーダ計測システムを、走査範囲内の物体上の点を検出点として検出し、検出された各検出点の相対位置と相対速度ベクトルとを計測するレーダ装置と、前記相対位置が相互に所定レベル以上近接する複数の検出点であって、かつ、当該複数の検出点に対して設定した仮想回転中心点まわりの角速度が近似する複数の検出点に対して、当該複数の検出点の前記仮想回転中心点まわりの角速度の代表値を当該検出点の角速度として算定する角速度算定手段とより構成したものである。ここで、前記角速度算定手段は、前記複数の検出点の対地速度ベクトルを、当該検出点について計測された前記相対速度ベクトルに基づいて算出し、前記複数の検出点の各々について、当該検出点について計測された相対位置が示す位置を通る、当該検出点について算出した対地速度ベクトルと垂直な直線を求め、前記複数の検出点の各々について求めた直線の交点を前記仮想中心点として設定し、前記複数の検出点の各々について、当該検出点について算出した対地速度ベクトルを、前記回転中心点まわりの回転運動の接線速度ベクトルと見なして求めた当該回転運動の角速度を、当該検出点の前記仮想回転中心点まわりの前記角速度として算定するものである。
【0007】
このようなレーダ計測システムによれば、レーダ装置を用いて物体の角速度も算定することができ、当該物体のレーダ装置に対する相対的な運動をより正しく計測することができるようになる。
ここで、このようなレーダ計測システムには、さらに、前記レーダ装置が検出した検出点のうち、少なくとも、前記相対位置が近接し、かつ、前記角速度算定手段が算定した角速度が所定のレベル以上近似する検出点を、同じ物体に対して検出された検出点として識別する同物体上検出点識別手段を備えるようにしてもよい。また、この場合には、前記同物体上検出点識別手段において、少なくとも、前記相対位置が近接し、かつ、前記角速度算定手段が算定した角速度が所定のレベル以上近似する、当該角速度の算定に用いられた前記仮想回転中心点が近接する検出点を、同じ物体に対して検出された検出点として識別するようにしてもよい。
【0008】
このようにすることにより、算定した角速度や回転中心を用いて、精度よく、同一の物体に対してレーダ装置で計測された検出点の弁別を行うことができるようになる。
なお、以上のレーダ計測システムは、自動車に搭載された、当該自動車周辺の少なくとも一部を前記走査範囲とする前記レーダを備えたレーダ計測システムとして構成するようにしてもよい。
【発明の効果】
【0009】
以上のように、本発明によれば、レーダ装置を用いて物体のレーダ装置に対する相対的な運動をより正しく計測することができる。
また、本発明によれば、物体毎に、当該物体についてレーダ装置で計測した位置を、精度良く弁別することができる。
【発明を実施するための最良の形態】
【0010】
以下、本発明の実施形態について、自動車に搭載される車載周辺監視システムへの適用を例にとり説明する。
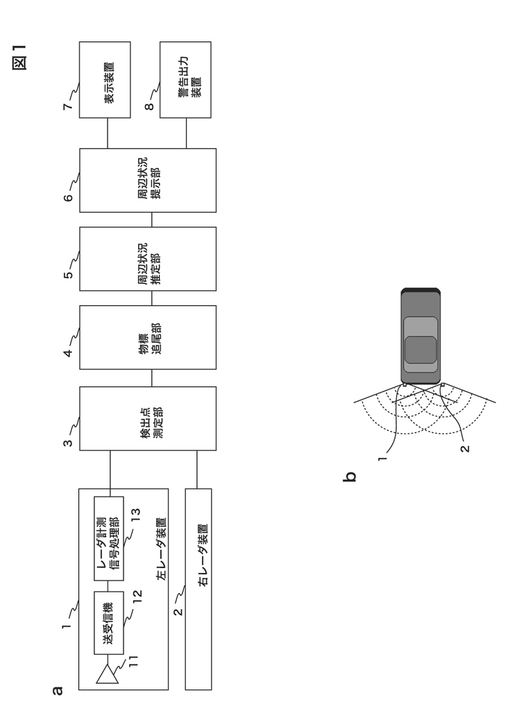
図1aに、本実施形態に係る車載周辺監視システムの構成を示す。
図示するように、車載周辺監視システムは、左レーダ装置1、右レーダ装置2、検出点測定部3、物標追尾部4、周辺状況推定部5、周辺状況提示部6、表示装置7、警告出力装置8を含んで構成される。
また、左レーダ装置1、右レーダ装置2は、同じ構成を有しており、それぞれ、アンテナ11と、送受信機12と、レーダ計測信号処理部13とより構成されている。そして、レーダ計測信号処理部13は、送受信機12を介してアンテナ11を駆動し、所定のスキャン範囲内に存在する物体上のレーダ反射点を検出点として検出し、検出点のアンテナ11に対する相対位置を示す相対位置ベクトル、検出された各物体のアンテナ11に対する遠近方向の相対速度の大きさと向きを表す遠近方向相対速度ベクトルを計測し、計測データとして検出点測定部3に出力するスキャンを繰り返し行う。
【0011】
ここで、図1bに示すように、左レーダ装置1と右レーダ装置2は、たとえば、車両後部に左右方向に離間して配置されている。すなわち、左レーダ装置1は車両の後部左側部に配置されており、車両の後方をスキャン範囲として、スキャン範囲内の物体上のレーダ反射点を検出点として検出する。また、右レーダ装置2は車両の後部右側部に配置されており、車両の後方をスキャン範囲として、スキャン範囲内の物体上のレーダ反射点を検出点として検出する。なお、左レーダ装置1と右レーダ装置2のスキャンの周期は同一である。なお、検出点は、一つの物体に対して複数検出され得る。
【0012】
次に、検出点測定部3は、左レーダ装置1の1回のスキャンの終了の度に後述する検出点測定処理を行って、左レーダ装置1と右レーダ装置2から出力される計測データに基づいて、左レーダ装置1が検出した各検出点の位置ベクトルと遠近方向相対速度ベクトルと相対速度ベクトルと角速度と回転中心とを算定する。そして、各検出点毎に、当該検出点について算定した位置ベクトルと遠近方向相対速度ベクトルと相対速度ベクトルと角速度と回転中心とを含めた検出点測定データを生成し、物標追尾部4に出力する。
【0013】
物標追尾部4は、検出点測定部3が1回の検出点測定処理を行う度に、検出点測定処理で出力された各検出点測定データを、同じ物体に対して測定された検出点測定データ同士のグループにグループ分する。このグループ分けは、角速度と回転中心を含む検出点測定データについては、位置ベクトルが所定レベル以上近似し、かつ、角速度と回転中心が所定レベル以上近似する検出点測定データは、同じ物体に対して測定された検出点測定データであるとすることにより行う。または、回転中心を考慮せずに、簡易的に、位置ベクトルが所定レベル以上近似し、かつ、角速度が所定レベル以上近似する検出点測定データは、同じ物体に対して測定された検出点測定データであるとすることにより行うようにすることもできる。一方、速度と回転中心を含まず、相対速度ベクトルや位置ベクトルを含む検出点測定データについては、位置ベクトルが所定レベル以上近似し、かつ、相対速度ベクトルや位置ベクトルが所定レベル以上近似する検出点測定データは、同じ物体に対して測定された検出点測定データであるとすることによりグループ分けを行う。
【0014】
そして、物標追尾部4は、検出点測定データをグループ分けした各グループについて、一つの物標測定データを生成する。この物標測定データは、その物標測定データを生成するグループに対応する物体上の代表的な点の位置ベクトルと遠近方向相対速度ベクトルと相対速度ベクトルと角速度と回転中心を表すものであり、これらの値は、当該グループに属する検出点測定データが表す位置ベクトル、遠近方向相対速度ベクトル、相対速度ベクトル、角速度、回転中心の代表値を用いる。ただし、相対速度ベクトルと角速度と回転中心は、当該グループに属する検出点測定データに、これらが含まれていない場合には、物標測定データにも含めない。
【0015】
また、物標追尾部4は、このようにして生成した各物標測定データに基づいて、自車後方に存在する各物体の追尾を行い、追尾中の物体である追尾中物体毎に、追尾情報を生成、管理する物標追尾処理を繰り返し行う。ここで、物体の追尾とは、各時点で算定された物標測定データを、当該物標測定データが算定された物体毎に、当該物体の時系列の計測データとして系列化する処理である。また、ある追尾中物体の追尾情報とは、このように系列化された当該追尾中物体の時系列の物標測定データを指す。
【0016】
なお、この物標追尾処理では、たとえば、次のようにして物体の追尾を行う。
すなわち、物標測定データのうちに、ある追尾中物体の過去の物標測定データから推定される当該追尾中物体の現在の位置ベクトルと近似する位置ベクトルを示す物標測定データが存在する場合に、当該物標測定データを、当該追尾中物体の物標測定データであるとして、当該追尾中物体の追尾情報に加える。
【0017】
なお、ある物体の過去の物標測定データからの現在の位置ベクトルの推定は、過去最近の物標測定データが回転中心と角速度を含んでいる場合には、たとえば、過去最近の物標測定データの位置ベクトルが示す相対位置と当該過去最近の物標測定データ算出時よりの左レーダ装置1のアンテナ11の変位とより求まる、当該物体の現在の相対位置を、当該過去最近の物標測定データに含まれる回転中心と当該過去最近の物標測定データ算出時よりの左レーダ装置1のアンテナ11の変位とより求まる、当該回転中心の現在の相対位置を中心として、当該過去最近の物標測定データに含まれる角速度に当該過去最近の物標測定データ算出時よりの経過時間を乗じた角度回転した位置を示す相対位置ベクトルを、当該物体の現在の位置ベクトルとして推定することにより行うことができる。なお、左レーダ装置1のアンテナ11の変位は、自動車に備えた車速センサや方位センサや角速度センサなどの自車の走行状態を検知する各種センサの出力の履歴より求まる自車上の所定の基準点の変位と、当該基準点に対する左レーダ装置1の配置より求めることができる。
【0018】
また、物標測定データのうちに、追尾中物体の物標測定データとすることのできなかった物標測定データが存在する場合には、その物標測定データが計測された物体を、新たな追尾中物体として、その追尾情報を生成し、当該存在した物標測定データを、当該新たな追尾中物体の追尾情報に加える。また、当該物標追尾処理では、所定期間以上対応する物標測定データが計測されなかった追尾中物体については、その追尾を終了し、当該追尾中物体についての追尾情報を消去する。
【0019】
次に、周辺状況推定部5は、物標追尾部が追尾中の各物体について、追尾情報が示す当該物体の運動の特徴等から、自車を追い越し/追い抜き動作中の他車が存在するかどうかなどの、周辺の状況を推定する処理を行う。
そして、周辺状況提示部6は、各追尾中物体の追尾情報に基づいて、自車後方の他車の自車に対する相対位置や相対移動方向を表示装置7に表示する処理などを行う。また、各追尾中物体の追尾情報と、周辺状況推定部5が推定した周辺状況に基づいて、自車後方の他車が追い越し/追い抜き動作である場合に路線変更を行わないよう警告する音声を警告出力装置8から出力したり、追尾中物体との衝突の可能性が生じている場合にその旨を警告する音声を警告出力装置8から出力する処理なども行う。
【0020】
以下、前述のように検出点測定部3が行う検出点測定処理について説明する。
ここで、前述したように、この検出点測定処理は、左レーダ装置1の1回のスキャンの終了の度に行う。
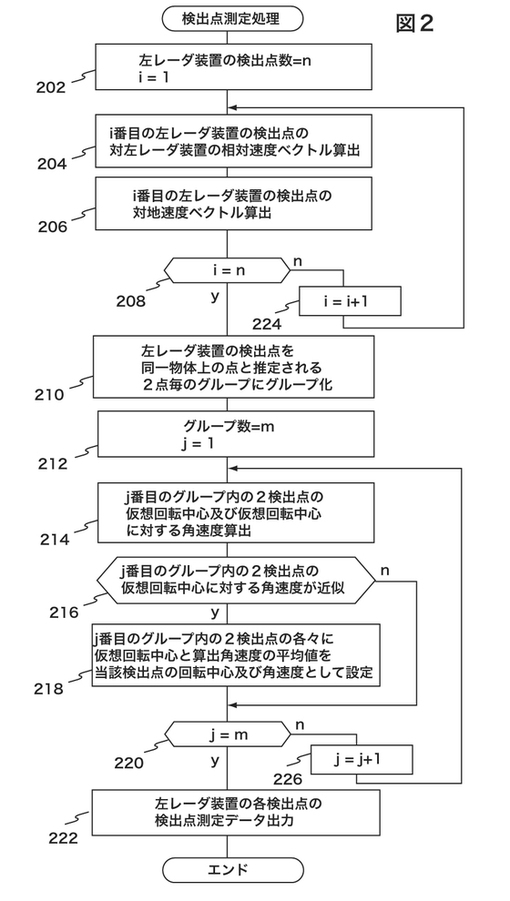
図2に、この検出点測定処理の手順を示す。
図示するように、この検出点測定処理では、まず、最近の左レーダ装置1のスキャンにおける検出点(計測データが計測された点)の各々を順次、処理対象検出点(i番目の検出点)として、各処理対象検出点について(ステップ202、208、224)、処理対象検出点の左レーダ装置1のアンテナ11に対する相対速度ベクトル(ステップ204)と、地面に対する相対速度ベクトルである対地速度ベクトルの算出を行う(ステップ206)。
【0021】
ここで、ステップ204において、処理対象検出点の左レーダ装置1のアンテナ11に対する相対速度ベクトルは、たとえば、次のように求める。
すなわち、まず、最近の右レーダ装置2のスキャンにおいて出力された計測データのうち、処理対象検出点と同じ点を計測したと推定される計測データを探索する。この探索では、たとえば、処理対象検出点の計測データの位置ベクトルが示す自車上の所定の基準点に対する相対位置に所定レベル以上近接する、前記基準点に対する相対位置を示す位置ベクトルを含む右レータ装置が出力した計測データのうちの、最も近接の度合いが強い計測データを、処理対象検出点と同じ点を計測したと推定される計測データとして探索する。
【0022】
そして、図3aに示すように、処理対象検出点の計測データの位置ベクトルが示す相対位置をPL、遠近方向相対速度ベクトルをuL、探索した右レーダ装置2が出力した計測データの位置ベクトルが示す相対位置をPR、遠近方向相対速度ベクトルをuRとして、次のように処理対象検出点の相対速度ベクトルを求める。
【0023】
すなわち、まず、PLから単位時間uLで進んだ位置を通る、PLと左レーダ装置1のアンテナ11を結ぶ直線LALに垂直な直線LBLと、PRから単位時間uRで進んだ位置を通る、PRと右レーダ装置2のアンテナ11を結ぶ直線LARに垂直な直線LBRとを求める。そして、点QLから見た点QRの位置ベクトルが、PLから見たPRの位置ベクトルΔPと等しくなるように、直線LBL上の点QLと直線LBR上の点QRとを求める。そして、単位時間にPLからQLまで(PRからQRとしても同じ)進む速度ベクトルuを、処理対象検出点の相対速度ベクトルとする。
【0024】
なお、相対速度ベクトルuは、図3bに示すように、右レーダ装置2のアンテナ11の位置を、点PRから見た点PLの位置ベクトルΔD分移動した位置をRDとして、PLから単位時間uLで進んだ位置を通る、PLと左レーダ装置1のアンテナ11を結ぶ直線LALに垂直な直線LBLと、PLから単位時間uRで進んだ位置を通る、PLとRDを結ぶ直線LARDに垂直な直線LBRDとの交点Qを求め、単位時間にPLからQまで進む速度ベクトルuを、このグループ対して算定する相対速度ベクトルとすることによっても同様に求めることができる。
【0025】
さて、このようにしてステップ204で求めた処理対象検出点の相対速度ベクトルを用いて、ステップ206では、処理対象検出点の対地速度ベクトルを、求めた相対速度ベクトルに、左レーダ装置1のアンテナ11の地面に対する相対速度ベクトルを加算することにより求める。なお、左レーダ装置1のアンテナ11の地面に対する相対速度ベクトルは、たとえば、自動車に備えた車速センサや方位センサや角速度センサなどの自車の走行状態を検出する各種センサの出力より求まる自動車上の所定の基準点の地面に対する相対速度ベクトルと、当該基準点に対する左レーダ装置1のアンテナ11の配置などより求めることができる。
【0026】
さて、図2に戻り、このようにして、最近の左レーダ装置1のスキャンにおける全ての検出点について相対速度ベクトル(ステップ204)と、対地速度ベクトルを(ステップ206)求めたならば、次に、最近の左レーダ装置1のスキャンにおける角検出点を、同じ物体上の点と推定される二つの検出点毎のグループにグループ化する(ステップ210)。ここでは、同一物体上の点である可能性が認められる程度に近接している二つの検出点の組の全てを、各々一つのグループとする。
【0027】
そして、各グループについて(ステップ212、220、226)、ステップ214、216、218の処理を行う。
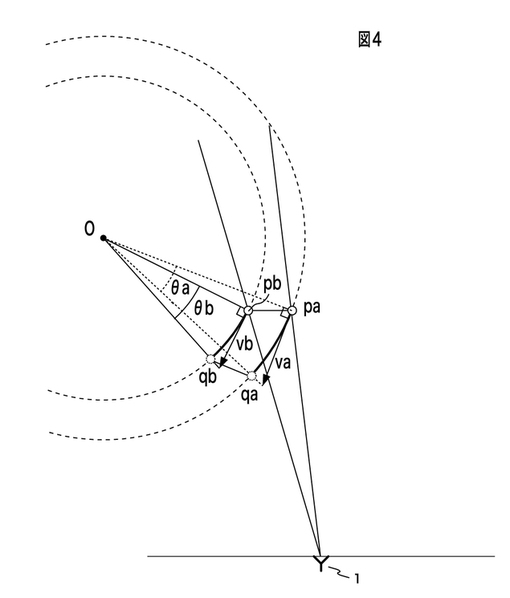
すなわち、まず、ステップ212において図4に示すように、グループ内の一方の検出点aの計測データの位置ベクトルが示す相対位置をpa、検出点aのステップ206で求めた対地速度ベクトルをvaとし、グループ内の他方の検出点bの計測データの位置ベクトルが示す相対位置をpb、検出点bのステップ206で求めた対地速度ベクトルをvbとし、相対位置paを通り対地速度ベクトルvaと垂直な直線と、相対位置pbを通り対地速度ベクトルvbと垂直な直線との交点Oを仮想中心点として求める。
【0028】
そして、検出点aが仮想中心点を中心とする回転運動をしているものと仮定し、対地速度ベクトルvaを当該回転運動の接線ベクトルと見なして検出点aの角速度を算出する。また、同様に、検出点bが仮想中心点を中心とする回転運動をしているものと仮定し、対地速度ベクトルvbを当該回転運動の接線ベクトルと見なして検出点bの角速度を算出する。すなわち、具体的には、相対位置paから対地速度ベクトルvaで単位時間進んだ相対位置qaと、相対位置pbから対地速度ベクトルvbで単位時間進んだ相対位置qbを求め、pa-O-qaの角度θaを検出点aの角速度、pb-O-qbの角度θbを検出点bの角速度として求める。
【0029】
そして、ステップ216で、このようにして求めた、検出点aの角速度と検出点bの角速度が所定レベル以上近似するかどうかを判定する。ここで、検出点aと検出点bが、回転運動を行っている同じ物体上の位置である場合、以上のようにして求めた両者の角速度は一致することになる。
【0030】
そして、近似していなければ、そのままこのグループについての処理を終了する。一方、近似している場合には、ステップ218において、グループ内の二つの検出点に、求めた仮想回転中心Oを回転中心として設定し、求めた二つの角速度θaとθbの平均値を角速度として設定する。
【0031】
ただし、既に回転中心や角速度が設定されている検出点については、新たな回転中心や角速度の設定は行わない。または、既に回転中心や角速度が設定されている検出点については、次のように処理する。すなわち、回転中心や角速度をグループ内の二つの検出点に設定するときに、併せて、当該設定を行う各検出点に対応づけて、求めた二つの角速度θaとθbの差分を記憶しておくようにする。そして、既に回転中心や角速度が設定されている検出点について、ステップ214で所定のレベル以上近接する角速度が算出された場合には、今回求めた二つの角速度θaとθbの差分が、当該検出点に対応づけて記憶されている差分よりも小さい場合にのみ、新たな回転中心や角速度の設定を行うようにする。
【0032】
さて、図3に戻り、各グループについてステップ214、216、218の処理を終了したならば、最近の左レーダ装置1のスキャンにおける検出点(計測データが計測された点)の各々について検出点測定データを生成して出力し(ステップ222)、検出点測定処理を終了する。ここで、この検出点測定データには、当該検出点についての左レーダ装置1が計測した計測データが表す位置ベクトルと、遠近方向相対速度ベクトルと、当該検出点を処理対象検出点としてステップ204で算出した相対速度ベクトルと、当該検出点を処理対象検出点としてステップ206で算出した対地速度ベクトルと、当該検出点に対してステップ218で設定した回転中心と角速度とを含める。ただし、相対速度ベクトルや対地速度ベクトルや回転中心や角速度のうち、当該検出点について算出、設定されていないものは、当該検出点についての検出点測定データには含めない。
【0033】
以上、検出点測定部3が行う検出点測定処理について説明した。
このように本実施形態によれば、レーダ装置を用いて、自車周辺の回転運動を行っている他車などの移動体の、角速度と回転中心を算定することができる。また、このようにした算出した角速度や回転中心を用いて、精度よく、同一の物体に対してレーダ装置で計測された検出点の識別や、物体の追尾を行うことができるようになる。
【図面の簡単な説明】
【0034】
【図1】本発明の実施形態に係る車載周辺監視システムの構成を示すブロック図である。
【図2】本発明の実施形態に係る物体計測処理を示すフローチャートである。
【図3】本発明の実施形態に係る物体計測処理における相対速度ベクトルの算出例を示す図である。
【図4】本本発明の実施形態に係る物体計測処理における角速度の算出例を示す図である。
【符号の説明】
【0035】
1…左レーダ装置、2…右レーダ装置、3…検出点測定部、4…物標追尾部、5…周辺状況推定部、6…周辺状況提示部、7…表示装置、8…警告出力装置、11…アンテナ、12…送受信機、13…レーダ計測信号処理部。
【技術分野】
【0001】
本発明は、レーダ装置を用いて移動体を計測する技術に関するものである。
【背景技術】
【0002】
レーダ装置を用いて移動体を計測する技術としては、レーダ装置に対する物体の相対位置の他に、物体の反射波に生じたドップラシフト量が表す物体のレーダ装置に対して遠近する方向の速度成分を測定する技術が知られている。
また、このようなレーダ装置を用いて移動体を計測する技術としては、レーダ装置が計測した複数の物体の位置のうち、相互に所定レベル以上近接する位置は、同じ移動体について計測された位置であるとして、当該移動体の位置を計測する技術が知られている(たとえば、特許文献1)。
【特許文献1】特開平11-72557号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
レーダ装置を用いた従来の計測の技術によれば、レーダ装置に対して遠近する方向の速度成分しか測定することができず、物体の角速度などを測定することができなかった。そして、このために、物体のレーダ装置に対する相対的な運動を正しく計測することができなかった。
【0004】
また、前述した特許文献1の技術によれば、近接した併走する2つの移動体に対してレーダ装置が計測した複数の位置の全てを、単一の移動体上の位置として誤検出してしまうことがあった。また、この結果、一方の移動体の存在の検出漏れが生じてしまう場合があった。
【0005】
そこで、本発明は、レーダ装置を用いて物体のレーダ装置に対する相対的な運動をより正しく計測することを課題とする。
また、併せて、本発明は、物体毎に、当該物体についてレーダ装置で計測した位置を、精度良く弁別することを課題とする。
【課題を解決するための手段】
【0006】
前記課題達成のために、本発明は、レーダを用いて移動体を計測するレーダ計測システムを、走査範囲内の物体上の点を検出点として検出し、検出された各検出点の相対位置と相対速度ベクトルとを計測するレーダ装置と、前記相対位置が相互に所定レベル以上近接する複数の検出点であって、かつ、当該複数の検出点に対して設定した仮想回転中心点まわりの角速度が近似する複数の検出点に対して、当該複数の検出点の前記仮想回転中心点まわりの角速度の代表値を当該検出点の角速度として算定する角速度算定手段とより構成したものである。ここで、前記角速度算定手段は、前記複数の検出点の対地速度ベクトルを、当該検出点について計測された前記相対速度ベクトルに基づいて算出し、前記複数の検出点の各々について、当該検出点について計測された相対位置が示す位置を通る、当該検出点について算出した対地速度ベクトルと垂直な直線を求め、前記複数の検出点の各々について求めた直線の交点を前記仮想中心点として設定し、前記複数の検出点の各々について、当該検出点について算出した対地速度ベクトルを、前記回転中心点まわりの回転運動の接線速度ベクトルと見なして求めた当該回転運動の角速度を、当該検出点の前記仮想回転中心点まわりの前記角速度として算定するものである。
【0007】
このようなレーダ計測システムによれば、レーダ装置を用いて物体の角速度も算定することができ、当該物体のレーダ装置に対する相対的な運動をより正しく計測することができるようになる。
ここで、このようなレーダ計測システムには、さらに、前記レーダ装置が検出した検出点のうち、少なくとも、前記相対位置が近接し、かつ、前記角速度算定手段が算定した角速度が所定のレベル以上近似する検出点を、同じ物体に対して検出された検出点として識別する同物体上検出点識別手段を備えるようにしてもよい。また、この場合には、前記同物体上検出点識別手段において、少なくとも、前記相対位置が近接し、かつ、前記角速度算定手段が算定した角速度が所定のレベル以上近似する、当該角速度の算定に用いられた前記仮想回転中心点が近接する検出点を、同じ物体に対して検出された検出点として識別するようにしてもよい。
【0008】
このようにすることにより、算定した角速度や回転中心を用いて、精度よく、同一の物体に対してレーダ装置で計測された検出点の弁別を行うことができるようになる。
なお、以上のレーダ計測システムは、自動車に搭載された、当該自動車周辺の少なくとも一部を前記走査範囲とする前記レーダを備えたレーダ計測システムとして構成するようにしてもよい。
【発明の効果】
【0009】
以上のように、本発明によれば、レーダ装置を用いて物体のレーダ装置に対する相対的な運動をより正しく計測することができる。
また、本発明によれば、物体毎に、当該物体についてレーダ装置で計測した位置を、精度良く弁別することができる。
【発明を実施するための最良の形態】
【0010】
以下、本発明の実施形態について、自動車に搭載される車載周辺監視システムへの適用を例にとり説明する。
図1aに、本実施形態に係る車載周辺監視システムの構成を示す。
図示するように、車載周辺監視システムは、左レーダ装置1、右レーダ装置2、検出点測定部3、物標追尾部4、周辺状況推定部5、周辺状況提示部6、表示装置7、警告出力装置8を含んで構成される。
また、左レーダ装置1、右レーダ装置2は、同じ構成を有しており、それぞれ、アンテナ11と、送受信機12と、レーダ計測信号処理部13とより構成されている。そして、レーダ計測信号処理部13は、送受信機12を介してアンテナ11を駆動し、所定のスキャン範囲内に存在する物体上のレーダ反射点を検出点として検出し、検出点のアンテナ11に対する相対位置を示す相対位置ベクトル、検出された各物体のアンテナ11に対する遠近方向の相対速度の大きさと向きを表す遠近方向相対速度ベクトルを計測し、計測データとして検出点測定部3に出力するスキャンを繰り返し行う。
【0011】
ここで、図1bに示すように、左レーダ装置1と右レーダ装置2は、たとえば、車両後部に左右方向に離間して配置されている。すなわち、左レーダ装置1は車両の後部左側部に配置されており、車両の後方をスキャン範囲として、スキャン範囲内の物体上のレーダ反射点を検出点として検出する。また、右レーダ装置2は車両の後部右側部に配置されており、車両の後方をスキャン範囲として、スキャン範囲内の物体上のレーダ反射点を検出点として検出する。なお、左レーダ装置1と右レーダ装置2のスキャンの周期は同一である。なお、検出点は、一つの物体に対して複数検出され得る。
【0012】
次に、検出点測定部3は、左レーダ装置1の1回のスキャンの終了の度に後述する検出点測定処理を行って、左レーダ装置1と右レーダ装置2から出力される計測データに基づいて、左レーダ装置1が検出した各検出点の位置ベクトルと遠近方向相対速度ベクトルと相対速度ベクトルと角速度と回転中心とを算定する。そして、各検出点毎に、当該検出点について算定した位置ベクトルと遠近方向相対速度ベクトルと相対速度ベクトルと角速度と回転中心とを含めた検出点測定データを生成し、物標追尾部4に出力する。
【0013】
物標追尾部4は、検出点測定部3が1回の検出点測定処理を行う度に、検出点測定処理で出力された各検出点測定データを、同じ物体に対して測定された検出点測定データ同士のグループにグループ分する。このグループ分けは、角速度と回転中心を含む検出点測定データについては、位置ベクトルが所定レベル以上近似し、かつ、角速度と回転中心が所定レベル以上近似する検出点測定データは、同じ物体に対して測定された検出点測定データであるとすることにより行う。または、回転中心を考慮せずに、簡易的に、位置ベクトルが所定レベル以上近似し、かつ、角速度が所定レベル以上近似する検出点測定データは、同じ物体に対して測定された検出点測定データであるとすることにより行うようにすることもできる。一方、速度と回転中心を含まず、相対速度ベクトルや位置ベクトルを含む検出点測定データについては、位置ベクトルが所定レベル以上近似し、かつ、相対速度ベクトルや位置ベクトルが所定レベル以上近似する検出点測定データは、同じ物体に対して測定された検出点測定データであるとすることによりグループ分けを行う。
【0014】
そして、物標追尾部4は、検出点測定データをグループ分けした各グループについて、一つの物標測定データを生成する。この物標測定データは、その物標測定データを生成するグループに対応する物体上の代表的な点の位置ベクトルと遠近方向相対速度ベクトルと相対速度ベクトルと角速度と回転中心を表すものであり、これらの値は、当該グループに属する検出点測定データが表す位置ベクトル、遠近方向相対速度ベクトル、相対速度ベクトル、角速度、回転中心の代表値を用いる。ただし、相対速度ベクトルと角速度と回転中心は、当該グループに属する検出点測定データに、これらが含まれていない場合には、物標測定データにも含めない。
【0015】
また、物標追尾部4は、このようにして生成した各物標測定データに基づいて、自車後方に存在する各物体の追尾を行い、追尾中の物体である追尾中物体毎に、追尾情報を生成、管理する物標追尾処理を繰り返し行う。ここで、物体の追尾とは、各時点で算定された物標測定データを、当該物標測定データが算定された物体毎に、当該物体の時系列の計測データとして系列化する処理である。また、ある追尾中物体の追尾情報とは、このように系列化された当該追尾中物体の時系列の物標測定データを指す。
【0016】
なお、この物標追尾処理では、たとえば、次のようにして物体の追尾を行う。
すなわち、物標測定データのうちに、ある追尾中物体の過去の物標測定データから推定される当該追尾中物体の現在の位置ベクトルと近似する位置ベクトルを示す物標測定データが存在する場合に、当該物標測定データを、当該追尾中物体の物標測定データであるとして、当該追尾中物体の追尾情報に加える。
【0017】
なお、ある物体の過去の物標測定データからの現在の位置ベクトルの推定は、過去最近の物標測定データが回転中心と角速度を含んでいる場合には、たとえば、過去最近の物標測定データの位置ベクトルが示す相対位置と当該過去最近の物標測定データ算出時よりの左レーダ装置1のアンテナ11の変位とより求まる、当該物体の現在の相対位置を、当該過去最近の物標測定データに含まれる回転中心と当該過去最近の物標測定データ算出時よりの左レーダ装置1のアンテナ11の変位とより求まる、当該回転中心の現在の相対位置を中心として、当該過去最近の物標測定データに含まれる角速度に当該過去最近の物標測定データ算出時よりの経過時間を乗じた角度回転した位置を示す相対位置ベクトルを、当該物体の現在の位置ベクトルとして推定することにより行うことができる。なお、左レーダ装置1のアンテナ11の変位は、自動車に備えた車速センサや方位センサや角速度センサなどの自車の走行状態を検知する各種センサの出力の履歴より求まる自車上の所定の基準点の変位と、当該基準点に対する左レーダ装置1の配置より求めることができる。
【0018】
また、物標測定データのうちに、追尾中物体の物標測定データとすることのできなかった物標測定データが存在する場合には、その物標測定データが計測された物体を、新たな追尾中物体として、その追尾情報を生成し、当該存在した物標測定データを、当該新たな追尾中物体の追尾情報に加える。また、当該物標追尾処理では、所定期間以上対応する物標測定データが計測されなかった追尾中物体については、その追尾を終了し、当該追尾中物体についての追尾情報を消去する。
【0019】
次に、周辺状況推定部5は、物標追尾部が追尾中の各物体について、追尾情報が示す当該物体の運動の特徴等から、自車を追い越し/追い抜き動作中の他車が存在するかどうかなどの、周辺の状況を推定する処理を行う。
そして、周辺状況提示部6は、各追尾中物体の追尾情報に基づいて、自車後方の他車の自車に対する相対位置や相対移動方向を表示装置7に表示する処理などを行う。また、各追尾中物体の追尾情報と、周辺状況推定部5が推定した周辺状況に基づいて、自車後方の他車が追い越し/追い抜き動作である場合に路線変更を行わないよう警告する音声を警告出力装置8から出力したり、追尾中物体との衝突の可能性が生じている場合にその旨を警告する音声を警告出力装置8から出力する処理なども行う。
【0020】
以下、前述のように検出点測定部3が行う検出点測定処理について説明する。
ここで、前述したように、この検出点測定処理は、左レーダ装置1の1回のスキャンの終了の度に行う。
図2に、この検出点測定処理の手順を示す。
図示するように、この検出点測定処理では、まず、最近の左レーダ装置1のスキャンにおける検出点(計測データが計測された点)の各々を順次、処理対象検出点(i番目の検出点)として、各処理対象検出点について(ステップ202、208、224)、処理対象検出点の左レーダ装置1のアンテナ11に対する相対速度ベクトル(ステップ204)と、地面に対する相対速度ベクトルである対地速度ベクトルの算出を行う(ステップ206)。
【0021】
ここで、ステップ204において、処理対象検出点の左レーダ装置1のアンテナ11に対する相対速度ベクトルは、たとえば、次のように求める。
すなわち、まず、最近の右レーダ装置2のスキャンにおいて出力された計測データのうち、処理対象検出点と同じ点を計測したと推定される計測データを探索する。この探索では、たとえば、処理対象検出点の計測データの位置ベクトルが示す自車上の所定の基準点に対する相対位置に所定レベル以上近接する、前記基準点に対する相対位置を示す位置ベクトルを含む右レータ装置が出力した計測データのうちの、最も近接の度合いが強い計測データを、処理対象検出点と同じ点を計測したと推定される計測データとして探索する。
【0022】
そして、図3aに示すように、処理対象検出点の計測データの位置ベクトルが示す相対位置をPL、遠近方向相対速度ベクトルをuL、探索した右レーダ装置2が出力した計測データの位置ベクトルが示す相対位置をPR、遠近方向相対速度ベクトルをuRとして、次のように処理対象検出点の相対速度ベクトルを求める。
【0023】
すなわち、まず、PLから単位時間uLで進んだ位置を通る、PLと左レーダ装置1のアンテナ11を結ぶ直線LALに垂直な直線LBLと、PRから単位時間uRで進んだ位置を通る、PRと右レーダ装置2のアンテナ11を結ぶ直線LARに垂直な直線LBRとを求める。そして、点QLから見た点QRの位置ベクトルが、PLから見たPRの位置ベクトルΔPと等しくなるように、直線LBL上の点QLと直線LBR上の点QRとを求める。そして、単位時間にPLからQLまで(PRからQRとしても同じ)進む速度ベクトルuを、処理対象検出点の相対速度ベクトルとする。
【0024】
なお、相対速度ベクトルuは、図3bに示すように、右レーダ装置2のアンテナ11の位置を、点PRから見た点PLの位置ベクトルΔD分移動した位置をRDとして、PLから単位時間uLで進んだ位置を通る、PLと左レーダ装置1のアンテナ11を結ぶ直線LALに垂直な直線LBLと、PLから単位時間uRで進んだ位置を通る、PLとRDを結ぶ直線LARDに垂直な直線LBRDとの交点Qを求め、単位時間にPLからQまで進む速度ベクトルuを、このグループ対して算定する相対速度ベクトルとすることによっても同様に求めることができる。
【0025】
さて、このようにしてステップ204で求めた処理対象検出点の相対速度ベクトルを用いて、ステップ206では、処理対象検出点の対地速度ベクトルを、求めた相対速度ベクトルに、左レーダ装置1のアンテナ11の地面に対する相対速度ベクトルを加算することにより求める。なお、左レーダ装置1のアンテナ11の地面に対する相対速度ベクトルは、たとえば、自動車に備えた車速センサや方位センサや角速度センサなどの自車の走行状態を検出する各種センサの出力より求まる自動車上の所定の基準点の地面に対する相対速度ベクトルと、当該基準点に対する左レーダ装置1のアンテナ11の配置などより求めることができる。
【0026】
さて、図2に戻り、このようにして、最近の左レーダ装置1のスキャンにおける全ての検出点について相対速度ベクトル(ステップ204)と、対地速度ベクトルを(ステップ206)求めたならば、次に、最近の左レーダ装置1のスキャンにおける角検出点を、同じ物体上の点と推定される二つの検出点毎のグループにグループ化する(ステップ210)。ここでは、同一物体上の点である可能性が認められる程度に近接している二つの検出点の組の全てを、各々一つのグループとする。
【0027】
そして、各グループについて(ステップ212、220、226)、ステップ214、216、218の処理を行う。
すなわち、まず、ステップ212において図4に示すように、グループ内の一方の検出点aの計測データの位置ベクトルが示す相対位置をpa、検出点aのステップ206で求めた対地速度ベクトルをvaとし、グループ内の他方の検出点bの計測データの位置ベクトルが示す相対位置をpb、検出点bのステップ206で求めた対地速度ベクトルをvbとし、相対位置paを通り対地速度ベクトルvaと垂直な直線と、相対位置pbを通り対地速度ベクトルvbと垂直な直線との交点Oを仮想中心点として求める。
【0028】
そして、検出点aが仮想中心点を中心とする回転運動をしているものと仮定し、対地速度ベクトルvaを当該回転運動の接線ベクトルと見なして検出点aの角速度を算出する。また、同様に、検出点bが仮想中心点を中心とする回転運動をしているものと仮定し、対地速度ベクトルvbを当該回転運動の接線ベクトルと見なして検出点bの角速度を算出する。すなわち、具体的には、相対位置paから対地速度ベクトルvaで単位時間進んだ相対位置qaと、相対位置pbから対地速度ベクトルvbで単位時間進んだ相対位置qbを求め、pa-O-qaの角度θaを検出点aの角速度、pb-O-qbの角度θbを検出点bの角速度として求める。
【0029】
そして、ステップ216で、このようにして求めた、検出点aの角速度と検出点bの角速度が所定レベル以上近似するかどうかを判定する。ここで、検出点aと検出点bが、回転運動を行っている同じ物体上の位置である場合、以上のようにして求めた両者の角速度は一致することになる。
【0030】
そして、近似していなければ、そのままこのグループについての処理を終了する。一方、近似している場合には、ステップ218において、グループ内の二つの検出点に、求めた仮想回転中心Oを回転中心として設定し、求めた二つの角速度θaとθbの平均値を角速度として設定する。
【0031】
ただし、既に回転中心や角速度が設定されている検出点については、新たな回転中心や角速度の設定は行わない。または、既に回転中心や角速度が設定されている検出点については、次のように処理する。すなわち、回転中心や角速度をグループ内の二つの検出点に設定するときに、併せて、当該設定を行う各検出点に対応づけて、求めた二つの角速度θaとθbの差分を記憶しておくようにする。そして、既に回転中心や角速度が設定されている検出点について、ステップ214で所定のレベル以上近接する角速度が算出された場合には、今回求めた二つの角速度θaとθbの差分が、当該検出点に対応づけて記憶されている差分よりも小さい場合にのみ、新たな回転中心や角速度の設定を行うようにする。
【0032】
さて、図3に戻り、各グループについてステップ214、216、218の処理を終了したならば、最近の左レーダ装置1のスキャンにおける検出点(計測データが計測された点)の各々について検出点測定データを生成して出力し(ステップ222)、検出点測定処理を終了する。ここで、この検出点測定データには、当該検出点についての左レーダ装置1が計測した計測データが表す位置ベクトルと、遠近方向相対速度ベクトルと、当該検出点を処理対象検出点としてステップ204で算出した相対速度ベクトルと、当該検出点を処理対象検出点としてステップ206で算出した対地速度ベクトルと、当該検出点に対してステップ218で設定した回転中心と角速度とを含める。ただし、相対速度ベクトルや対地速度ベクトルや回転中心や角速度のうち、当該検出点について算出、設定されていないものは、当該検出点についての検出点測定データには含めない。
【0033】
以上、検出点測定部3が行う検出点測定処理について説明した。
このように本実施形態によれば、レーダ装置を用いて、自車周辺の回転運動を行っている他車などの移動体の、角速度と回転中心を算定することができる。また、このようにした算出した角速度や回転中心を用いて、精度よく、同一の物体に対してレーダ装置で計測された検出点の識別や、物体の追尾を行うことができるようになる。
【図面の簡単な説明】
【0034】
【図1】本発明の実施形態に係る車載周辺監視システムの構成を示すブロック図である。
【図2】本発明の実施形態に係る物体計測処理を示すフローチャートである。
【図3】本発明の実施形態に係る物体計測処理における相対速度ベクトルの算出例を示す図である。
【図4】本本発明の実施形態に係る物体計測処理における角速度の算出例を示す図である。
【符号の説明】
【0035】
1…左レーダ装置、2…右レーダ装置、3…検出点測定部、4…物標追尾部、5…周辺状況推定部、6…周辺状況提示部、7…表示装置、8…警告出力装置、11…アンテナ、12…送受信機、13…レーダ計測信号処理部。
【特許請求の範囲】
【請求項1】
レーダを用いて移動体を計測するレーダ計測システムであって、
走査範囲内の物体上の点を検出点として検出し、検出された各検出点の相対位置と相対速度ベクトルとを計測するレーダ装置と、
前記相対位置が相互に所定レベル以上近接する複数の検出点であって、かつ、当該複数の検出点に対して設定した仮想回転中心点まわりの角速度が近似する複数の検出点に対して、当該複数の検出点の前記仮想回転中心点まわりの角速度の代表値を当該検出点の角速度として算定する角速度算定手段とを有し、
前記角速度算定手段は、前記複数の検出点の対地速度ベクトルを、当該検出点について計測された前記相対速度ベクトルに基づいて算出し、前記複数の検出点の各々について、当該検出点について計測された相対位置が示す位置を通る、当該検出点について算出した対地速度ベクトルと垂直な直線を求め、前記複数の検出点の各々について求めた直線の交点を前記仮想中心点として設定し、前記複数の検出点の各々について、当該検出点について算出した対地速度ベクトルを、前記回転中心点まわりの回転運動の接線速度ベクトルと見なして求めた当該回転運動の角速度を、当該検出点の前記仮想回転中心点まわりの前記角速度として算定することを特徴とするレーダ計測システム。
【請求項2】
請求項1記載のレーダ計測システムであって、
前記レーダ装置が検出した検出点のうち、少なくとも、前記相対位置が近接し、かつ、前記角速度算定手段が算定した角速度が所定のレベル以上近似する検出点を、同じ物体に対して検出された検出点として識別する同物体上検出点識別手段を有することを特徴とするレーダ計測システム。
【請求項3】
請求項2記載のレーダ計測システムであって、
前記同物体上検出点識別手段は、少なくとも、前記相対位置が近接し、かつ、前記角速度算定手段が算定した角速度が所定のレベル以上近似する、当該角速度の算定に用いられた前記仮想回転中心点が近接する検出点を、同じ物体に対して検出された検出点として識別することを特徴とするレーダ計測システム。
【請求項4】
請求項1、2または3記載のレーダ計測システムであって、
当該レーダ計測システムは自動車に搭載された、当該自動車周辺の少なくとも一部を前記走査範囲とする前記レーダを備えたレーダ計測システムであることを特徴とするレーダ計測システム。
【請求項5】
レーダを用いて物体の角速度を計測する角速度計測方法であって、
レーダ装置を用いて、当該レーダ装置の走査範囲内の物体上の点を検出点として検出すると共に、検出された各検出点の相対位置と相対速度ベクトルとを計測する計測ステップと、
前記相対位置が相互に所定レベル以上近接する複数の検出点であって、かつ、当該複数の検出点に対して設定した仮想回転中心点まわりの角速度が近似する複数の検出点に対して、当該複数の検出点の前記仮想回転中心点まわりの角速度の代表値を当該検出点の角速度として算定する角速度算定ステップとを有し、
前記角速度算定ステップにおいて、前記複数の検出点の対地速度ベクトルを、当該検出点について計測された前記相対速度ベクトルに基づいて算出し、前記複数の検出点の各々について、当該検出点について計測された相対位置が示す位置を通る、当該検出点について算出した対地速度ベクトルと垂直な直線を求め、前記複数の検出点の各々について求めた直線の交点を前記仮想中心点として設定し、前記複数の検出点の各々について、当該検出点について算出した対地速度ベクトルを、前記回転中心点まわりの回転運動の接線速度ベクトルと見なして求めた当該回転運動の角速度を、当該検出点の前記仮想回転中心点まわりの前記角速度として算定することを特徴とする角速度計測方法。
【請求項1】
レーダを用いて移動体を計測するレーダ計測システムであって、
走査範囲内の物体上の点を検出点として検出し、検出された各検出点の相対位置と相対速度ベクトルとを計測するレーダ装置と、
前記相対位置が相互に所定レベル以上近接する複数の検出点であって、かつ、当該複数の検出点に対して設定した仮想回転中心点まわりの角速度が近似する複数の検出点に対して、当該複数の検出点の前記仮想回転中心点まわりの角速度の代表値を当該検出点の角速度として算定する角速度算定手段とを有し、
前記角速度算定手段は、前記複数の検出点の対地速度ベクトルを、当該検出点について計測された前記相対速度ベクトルに基づいて算出し、前記複数の検出点の各々について、当該検出点について計測された相対位置が示す位置を通る、当該検出点について算出した対地速度ベクトルと垂直な直線を求め、前記複数の検出点の各々について求めた直線の交点を前記仮想中心点として設定し、前記複数の検出点の各々について、当該検出点について算出した対地速度ベクトルを、前記回転中心点まわりの回転運動の接線速度ベクトルと見なして求めた当該回転運動の角速度を、当該検出点の前記仮想回転中心点まわりの前記角速度として算定することを特徴とするレーダ計測システム。
【請求項2】
請求項1記載のレーダ計測システムであって、
前記レーダ装置が検出した検出点のうち、少なくとも、前記相対位置が近接し、かつ、前記角速度算定手段が算定した角速度が所定のレベル以上近似する検出点を、同じ物体に対して検出された検出点として識別する同物体上検出点識別手段を有することを特徴とするレーダ計測システム。
【請求項3】
請求項2記載のレーダ計測システムであって、
前記同物体上検出点識別手段は、少なくとも、前記相対位置が近接し、かつ、前記角速度算定手段が算定した角速度が所定のレベル以上近似する、当該角速度の算定に用いられた前記仮想回転中心点が近接する検出点を、同じ物体に対して検出された検出点として識別することを特徴とするレーダ計測システム。
【請求項4】
請求項1、2または3記載のレーダ計測システムであって、
当該レーダ計測システムは自動車に搭載された、当該自動車周辺の少なくとも一部を前記走査範囲とする前記レーダを備えたレーダ計測システムであることを特徴とするレーダ計測システム。
【請求項5】
レーダを用いて物体の角速度を計測する角速度計測方法であって、
レーダ装置を用いて、当該レーダ装置の走査範囲内の物体上の点を検出点として検出すると共に、検出された各検出点の相対位置と相対速度ベクトルとを計測する計測ステップと、
前記相対位置が相互に所定レベル以上近接する複数の検出点であって、かつ、当該複数の検出点に対して設定した仮想回転中心点まわりの角速度が近似する複数の検出点に対して、当該複数の検出点の前記仮想回転中心点まわりの角速度の代表値を当該検出点の角速度として算定する角速度算定ステップとを有し、
前記角速度算定ステップにおいて、前記複数の検出点の対地速度ベクトルを、当該検出点について計測された前記相対速度ベクトルに基づいて算出し、前記複数の検出点の各々について、当該検出点について計測された相対位置が示す位置を通る、当該検出点について算出した対地速度ベクトルと垂直な直線を求め、前記複数の検出点の各々について求めた直線の交点を前記仮想中心点として設定し、前記複数の検出点の各々について、当該検出点について算出した対地速度ベクトルを、前記回転中心点まわりの回転運動の接線速度ベクトルと見なして求めた当該回転運動の角速度を、当該検出点の前記仮想回転中心点まわりの前記角速度として算定することを特徴とする角速度計測方法。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2007−333615(P2007−333615A)
【公開日】平成19年12月27日(2007.12.27)
【国際特許分類】
【出願番号】特願2006−167075(P2006−167075)
【出願日】平成18年6月16日(2006.6.16)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
【公開日】平成19年12月27日(2007.12.27)
【国際特許分類】
【出願日】平成18年6月16日(2006.6.16)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
[ Back to top ]