
レーダ試験装置
【課題】
飛翔体に搭載された合成開口レーダが撮像したレーダ画像の絶対校正等に用いられるレーダ試験装置を提供することを目的とする。
【解決手段】
飛翔体に搭載された合成開口レーダの校正に用いるレーダ試験装置であって、レーダ試験装置は、合成開口レーダとの間でパルス電波の送受信を行うアンテナ部と、アンテナ部で受信したパルス信号に対する処理を実行する処理部と、を備えており、アンテナ部で受信したパルス信号に、処理部における遅延時間に対応する時間進みを与えることで、処理部における遅延時間を相殺する、レーダ試験装置である。
飛翔体に搭載された合成開口レーダが撮像したレーダ画像の絶対校正等に用いられるレーダ試験装置を提供することを目的とする。
【解決手段】
飛翔体に搭載された合成開口レーダの校正に用いるレーダ試験装置であって、レーダ試験装置は、合成開口レーダとの間でパルス電波の送受信を行うアンテナ部と、アンテナ部で受信したパルス信号に対する処理を実行する処理部と、を備えており、アンテナ部で受信したパルス信号に、処理部における遅延時間に対応する時間進みを与えることで、処理部における遅延時間を相殺する、レーダ試験装置である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、航空機や人工衛星などの飛翔体に搭載された合成開口レーダが撮像したレーダ画像の絶対校正等に用いられるレーダ試験装置に関する。
【背景技術】
【0002】
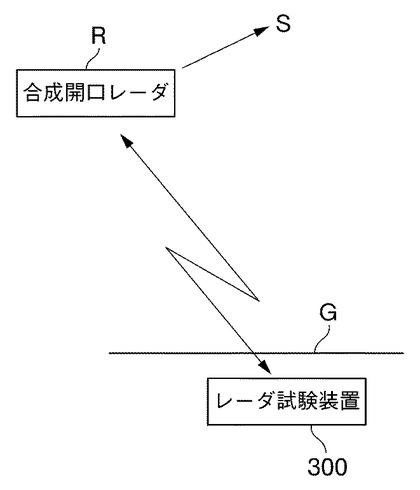
合成開口レーダ(Synthetic Aperture Radar:SAR)のレーダ画像の絶対校正等にはレーダ試験装置が用いられている。図8に、人工衛星に搭載された合成開口レーダRと地球表面Gに設置された従来のレーダ試験装置300との関係を模式的に示す。なお、図8においてSは人工衛星の進行方向である。
【0003】
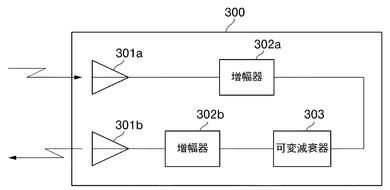
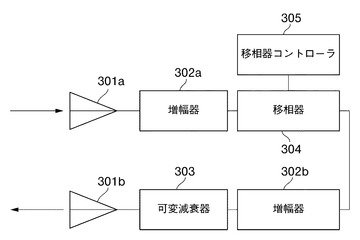
代表的なレーダ試験装置としては、図9に示すものが広く知られている。図9に示すレーダ試験装置300は、人工衛星に搭載された合成開口レーダRと地球表面Gに設置されたレーダ試験装置300との間でパルス電波の送受信を行うものであり、送受信を行うアンテナ301a、301bと、受信パルス信号の増幅を行う増幅器302a、302bと、レーダ試験装置300のレーダ断面積を設定する可変減衰器303とを具備している。
【0004】
人工衛星に搭載された合成開口レーダRからのパルス電波は、地球表面Gに設置されたレーダ試験装置300内の受信用アンテナ301aで受信されてから、増幅器302aで所定レベルまで増幅される。増幅された受信パルス信号は、レーダ試験装置300のレーダ断面積が所定の値に設定されるよう可変減衰器303の減衰量を調整する。その後、受信パルス信号は増幅器302bで所定レベルまで増幅された後、送信用アンテナ301bから合成開口レーダRに向けてパルス電波が送信される。
【0005】
また従来のレーダ試験装置の一例として、下記特許文献1に記載のレーダ試験装置がある。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2000−111642号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
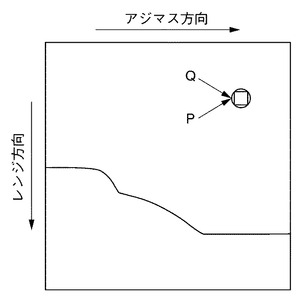
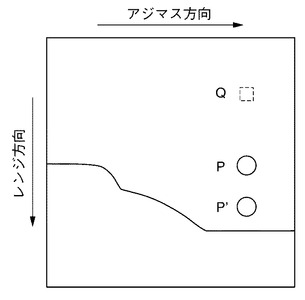
上述の特許文献1や図9に示した従来のレーダ試験装置300では、その内部処理に処理時間を要し、パルス電波の受信から送信までに、遅延時間Δtが発生する。そしてレーダ試験装置300の遅延時間Δtの影響により、レーダ画像上に現れるレーダ試験装置300の点像位置がレンジ方向(人工衛星の進行方向(アジマス方向)に直交する方向)にシフト(ずれ)してしまう。これを図11に模式的に示す。図11では、点Qがレーダ試験装置300を設置した位置であるが、上述の遅延時間Δtの影響により、レーダ試験装置300の点像位置は点Pや点P’で示す位置にシフトして現れる。たとえばレーダ試験装置300における遅延時間Δtが10ナノ秒程度とすると、1メートルから2メートル前後の位置のシフトが発生してしまう。
【0008】
このような技術的課題に対して、レーダ試験装置300の内部のデジタル処理で遅延時間を補正する解決方法が存在するが、回路として複雑になってしまう問題がある。
【0009】
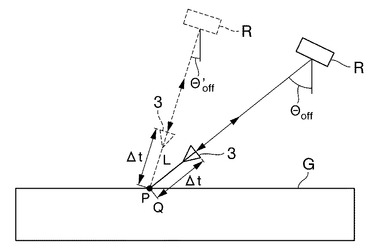
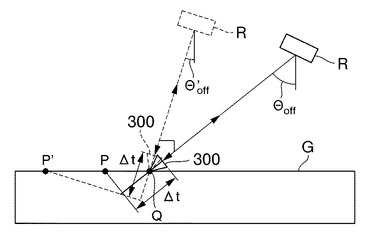
また、レーダ試験装置300の点像がシフトして現れる位置は、図10に示すように合成開口レーダRの観測時のオフナディア角θoffによって異なる。オフナディア角θoffの場合の点像位置は点Pに現れるが、オフナディア角θ’offの場合は点P’に現れる。
【0010】
従来のレーダ試験装置300ではレーダ試験装置300が有する遅延時間Δtが一定であっても、合成開口レーダRのオフナディア角θoffに依存してレーダ試験装置300の点像位置がレンジ方向の異なる位置にシフトしてしまう。そのため、レーダ試験装置300の点像を地上基準点(Ground Control Point:GCP)として使用する場合、幾何精度の低下が課題となり、レーダ試験装置300の遅延時間対策が必要となる技術的課題もある。
【課題を解決するための手段】
【0011】
そこで本発明者は上述の技術的課題に鑑み、等価的にレンジ方向への位置シフトを発生させないレーダ試験装置を発明した。
【0012】
第1の発明は、飛翔体に搭載された合成開口レーダの校正に用いるレーダ試験装置であって、前記レーダ試験装置は、前記合成開口レーダとの間でパルス電波の送受信を行うアンテナ部と、前記アンテナ部で受信したパルス信号に対する処理を実行する処理部と、を備えており、前記アンテナ部で受信したパルス信号に、前記処理部における遅延時間に対応する時間進みを与えることで、前記処理部における遅延時間を相殺する、レーダ試験装置である。
【0013】
本発明のように構成することで、レーダ試験装置の内部処理による遅延時間に基づく位置シフトを防止することが可能となる。
【0014】
上述の発明において、前記時間進みは、前記処理部における遅延時間に基づく遅延距離に概略一致する距離に前記アンテナ部を設けることで与えられる、レーダ試験装置のように構成することができる。
【0015】
上述の発明において、前記レーダ試験装置は、さらに、前記処理部における遅延時間に基づく遅延距離に概略一致する長さまたは高さを備えた支持機構を備えることで前記時間進みを与える、レーダ試験装置のように構成することができる。
【0016】
遅延時間については、遅延時間に基づく遅延距離だけ、合成開口レーダにアンテナ部を近づければ良い。そこで上述の発明のように構成することで、レーダ試験装置の内部処理による遅延時間に基づく位置シフトを防止することが可能となる。
【0017】
上述の発明において、前記支持機構は、前記支持機構の一端に備えられた軸を中心として回転可能な支持棒である可動アームであって、前記合成開口レーダのオフナディア角に基づいて前記可動アームの傾き角を算出し、法線に対して前記算出した傾き角で前記可動アームを傾けることで、レーダ画像における前記レーダ試験装置の点像位置のシフトを防止する、レーダ試験装置のように構成することができる。
【0018】
また上述の発明において、前記レーダ試験装置は、前記合成開口レーダのオフナディア角に基づいて、前記アンテナ部の傾き角を算出し、法線に対して前記算出した傾き角で前記アンテナ部を傾けることで、レーダ画像における前記レーダ試験装置の点像位置のシフトを防止する、レーダ試験装置のように構成することができる。
【0019】
レーダ試験装置のシフトする位置は、オフナディア角に依存する。そのため、地上基準点としてレーダ試験装置の位置を用いると精度が低下する。しかし、上述の発明のように構成することで、レーダ画像におけるレーダ試験装置の点像位置のシフトを防止できることから、精度の維持に繋がる。
【0020】
上述の発明において、前記レーダ試験装置は、さらに、前記可動アームと一端で接続しており、前記接続点において回転可能であって、前記可動アームが傾けられた場合に前記可動アームを支持する補助アームを備える、レーダ試験装置のように構成することができる。
【0021】
可動アームが傾けられると、回転の中心となる軸に負荷が発生し、軸の緩みなどが起こる可能性がある。そのため、上述の発明のように補助アームで支持することで、軸の緩みを防止できる。
【0022】
上述の発明において、前記支持機構は、その周囲に電波吸収材を取り付けている、レーダ試験装置のように構成することができる。
【0023】
また、上述の発明において、前記支持機構は、電波吸収材を含む素材により構成されている、レーダ試験装置のように構成することができる。
【0024】
可動アームのような支持機構を新たに備えることで、その部材自体の電波の反射の問題が発生する。これは精度の低下に繋がりかねない。そこで、上述の発明のように構成することで、かかる問題の発生を防止し、精度の維持を図ることが出来る。
【0025】
上述の発明において、前記支持機構は、前記合成開口レーダのオフナディア角に基づいて算出される高さを備えたペデスタルであって、前記合成開口レーダのオフナディア角に基づいて前記アンテナ部の傾き角を算出し、法線に対して前記算出した傾き角で前記アンテナ部を傾けることで、レーダ画像における前記レーダ試験装置の点像位置のシフトを防止する、レーダ試験装置のように構成することができる。
【0026】
遅延時間に基づく遅延距離を保つには、上述のようにアームのほか、本発明のようにペデスタルを用いることでも良い。この場合であっても同様の技術的効果を得ることが出来る。
【0027】
上述の発明において、前記処理部は、前記アンテナ部で受信したパルス信号を増幅する増幅器と、レーダ断面積の設定を行う可変減衰器と、を備えるレーダ試験装置のように構成することができる。
【0028】
処理部としては少なくとも上述のような機能を備えていることが好ましい。
【0029】
上述の発明は、飛翔体に搭載された合成開口レーダの校正に用いるレーダ試験装置であって、前記レーダ試験装置は、前記合成開口レーダとの間でパルス電波の送受信を行うアンテナ部と、前記アンテナ部で受信したパルス信号に対する処理を実行する処理部をその内部に備える筐体と、前記筐体と一端で接続しており、前記他の一端が、前記レーダ試験装置を支持する架台と接続しているアームと、を備えており、前記アームは、前記処理部における遅延時間に基づく遅延距離に概略一致する長さを有する、レーダ試験装置のように構成することができる。
【0030】
本発明のように構成することでも上述と同様の技術的効果を得ることが出来る。
【0031】
上述の発明において、前記アームは、前記筐体と接続する一端または前記架台と接続する一端で軸止されており、前記軸を中心として回転可能な可動アームであって、前記合成開口レーダのオフナディア角に基づいて算出された傾き角で前記可動アームを傾けることで、レーダ画像における前記レーダ試験装置の点像位置のシフトを防止する、レーダ試験装置のように構成することができる。
【0032】
レーダ試験装置のシフトする位置は、オフナディア角に依存する。そのため、地上基準点としてレーダ試験装置の位置を用いると精度が低下する。しかし、上述の発明のように構成することで、レーダ画像におけるレーダ試験装置の点像位置のシフトを防止できることから、精度の維持に繋がる。
【0033】
上述の発明において、飛翔体に搭載された合成開口レーダの校正に用いるレーダ試験装置であって、前記レーダ試験装置は、前記合成開口レーダとの間でパルス電波の送受信を行うアンテナ部と、前記アンテナ部で受信したパルス信号に対する処理を実行する処理部をその内部に備える筐体と、前記筐体と一端で接続しており、前記他の一端が、前記レーダ試験装置を支持する架台と接続しているペデスタルと、を備えており、前記ペデスタルは、前記処理部における遅延時間に基づく遅延距離に概略一致する高さを有する、レーダ試験装置のように構成することができる。
【0034】
本発明のように構成することでも上述と同様の技術的効果を得ることが出来る。
【発明の効果】
【0035】
本発明によって、レーダ画像上でレンジ方向への位置のシフトが発生しないレーダ試験装置が可能となる。また、本発明のレーダ試験装置を、地上基準点としても使用可能となる。
【図面の簡単な説明】
【0036】
【図1】本発明のレーダ試験装置の一例を示す図である。
【図2】本発明のレーダ試験装置のRF回路の機能も含めたレーダ試験装置の簡略構成図の一例である。
【図3】可動アーム部を傾けた状態の一例を示す図である。
【図4】本発明のレーダ試験装置で位置シフトが発生しないことの原理を説明する図である。
【図5】本発明のレーダ試験装置によるレーダ画像上で、点像の位置シフトが発生しないことを示す図である。
【図6】本発明のレーダ試験装置のほかの実施例の簡略外観図である。
【図7】実施例2におけるレーダ試験装置の使用状態を模式的に示す図である。
【図8】人工衛星に搭載された合成開口レーダと地球表面に設置された従来のレーダ試験装置との関係を模式的に示す図である。
【図9】従来のレーダ試験装置の構成の一例を示す図である。
【図10】従来のレーダ試験装置で位置シフトが発生することの原理を説明する図である。
【図11】従来のレーダ試験装置によるレーダ画像上で、点像の位置のシフトが発生することを示す図である。
【図12】合成開口レーダRのオフナディア角θoffと、可動アーム41の傾き角との関係を模式的に示す図である。
【図13】レーダ試験装置のレーダ画像上の位置をアジマス方向の任意の位置にシフトさせる、所定の速度で移動させるようにRF回路を構成した場合の一例を示す図である。
【図14】周波数オフセットを与える場合の従来のレーダ試験装置におけるRF回路の一例を示す図である。
【図15】レーダ試験装置のレーダ画像上の位置をアジマス方向の任意の位置にシフトさせた例を示す図である。
【図16】レーダ試験装置をアジマス方向に疑似移動体化させた例を示す図である。
【発明を実施するための形態】
【0037】
本発明のレーダ試験装置1は、従来のレーダ試験装置300のように地球表面Gに設置されるのではなく、レーダ試験装置1の信号処理を行う処理部などの制御回路による遅延時間に対応した時間進みを与えるように構成される。この時間進みは、たとえば、遅延時間に対応する遅延距離に概略一致する位置に、レーダ試験装置1の処理部やアンテナ部3を設けることで構成する。
【実施例1】
【0038】
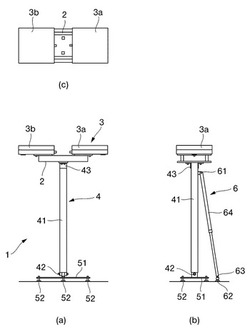
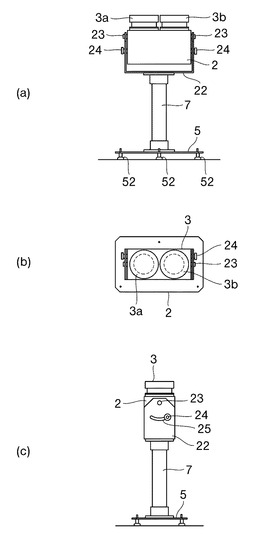
図1に本発明のレーダ試験装置1の構成の一例を模式的に示す。図1(a)はレーダ試験装置1の正面図であり、図1(b)はレーダ試験装置1の側面図であり、図1(c)はレーダ試験装置1の上面図である。本発明のレーダ試験装置1では、長さLの可動アーム部(後述)を設けている。
【0039】
本発明のレーダ試験装置1では、筐体2とアンテナ部3と可動アーム部4と架台5と補助アーム部6とを有している。
【0040】
筐体2はレーダ試験装置1における信号処理を行う制御回路、好ましくはRF回路21をその内部に備えている。図2は筐体2の制御回路の機能を含めて、レーダ試験装置1の簡略構成図とともに模式的に示した図である。RF回路21には、少なくとも増幅器211a、可変減衰器212、増幅器211bを備えているが、その目的に応じてほかの装置を備えていても良い。なお以下の説明では、RF回路21の場合を説明するが、それ以外の回路であっても良い。
【0041】
筐体2の上面にはアンテナ部3を備えている。アンテナ部3は、飛行機や人工衛星等の飛翔体に搭載された合成開口レーダRとの間で電波の送受信を行う。アンテナ部3は、受信用アンテナ3a、送信用アンテナ3bを備えている。
【0042】
なおアンテナ部3とRF回路21とは筐体2の内部において電気的に接続されている。受信用アンテナ3aで受信したパルス電波は、RF回路21の増幅器211aで所定レベルまで受信パルス信号として増幅される。その後、RF回路21の可変減衰器212では、レーダ試験装置1のレーダ断面積が所定の値に設定されるよう減衰量を調整する。そして増幅器211bで所定レベルまで増幅され、受信用パルス信号が送信用アンテナ3bから合成開口レーダRに向けてパルス電波の形で送信される。
【0043】
また筐体2はその底面において、地面に設置される架台5上の可動アーム部4と接合している。筐体2と可動アーム部4との接合方法は如何なるものであっても良く、螺着、溶着などさまざまな接合方法を採ることが出来る。
【0044】
可動アーム部4は、筐体2およびアンテナ部3を支持する支持機構であって、可動アーム部4は、長さLの可動アーム41と軸42とを有している。
【0045】
可動アーム41の上方の一端は筐体2と接合部43で接続しており、他の一端は軸42を介して架台5と接続している。可動アーム41の筐体2と接続する端部は、接合部43で固定される。
【0046】
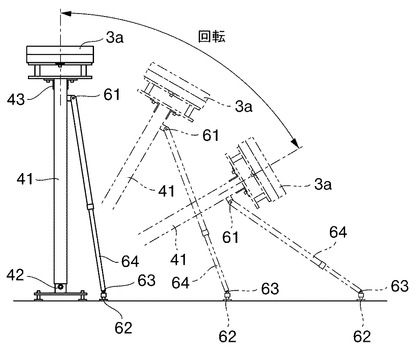
可動アーム41の架台5と接合する端部は、軸42で軸止され、軸42を中心に可動アーム部4が回動可能となることが好ましい。これによって、図3に示すように、軸42を中心として可動アーム部4が回動でき、結果としてアンテナ部3を任意の方向に傾けることが出来る。なお軸42は、平面に対して180度回動可能な軸でも良いし、空間の任意の方向に回動可能な軸であっても良い。前者の軸42の場合には可動アーム部4の一端に設けられた孔(図示せず)にピン(図示せず)を挿通し、固定することで、軸止することができる。後者の軸42の場合には、可動アーム部4の一端を球とし、それを球面上の軸受けで受けることで軸止することができる。なお、可動アーム部4の支持機構として図1では支持棒の場合を示したが、ペデスタル7のようなほかの支持機構であっても良い。なお、ペデスタル7の場合は後述する。
【0047】
可動アーム41の素材は鉄やアルミなどの金属製であっても良いし、グラファイト製であっても良い。素材としてグラファイトを用いた場合には、電波の影響を減らすことが出来るので好適である。また可動アーム41の周囲には電波吸収材を巻くことで電波の影響を減らしても良い。電波吸収材としては、たとえばゴムシート状のフェライトやカーボンなどがある。さらに、可動アーム41自体をグラファイト製のように、導電性電波吸収材、磁性電波吸収材などで構成しても良い。
【0048】
なお、上述の可動アーム41は、軸42を中心として回転可能になっているが、接合部43の代わりに、軸止めしても良い。この場合、当該軸を中心に、筐体2が傾けられることが好ましい。
【0049】
架台5は地面などに設置され、筐体2、アンテナ部3、可動アーム部4を支持する。架台5は基盤51と脚52とを備えている。脚52はその高さが調整可能となっていてもよい。また脚52は、基盤51に複数備えられている。これによって、地面が水平でない場合に、脚52の高さを調整することで、アンテナ部3を水平とすることが出来る。なお、脚52の代わりに車輪を用いても良い。また、電波の影響を減らすため、架台5、とくに基盤51を、可動アーム41と同様に、導電性電波吸収材、磁性電波吸収材などで構成することができる。たとえばグラファイト製とすることができる。また、電波吸収材を貼り付けることで電波の影響を減らしても良い。
【0050】
補助アーム部6は、上方の一端が可動アーム部4と接続しており、ほかの一端は地面と接することで、可動アーム部4を傾けた場合に、筐体部2、アンテナ部3、可動アーム部4を支持する。補助アーム部6は、補助アーム64と軸61と軸63とストッパー62とを備えている。補助アーム64は、その長さが伸縮自在であると良い。可動アーム部4が傾けられた場合に補助アーム64の長さを調整するためである。補助アーム部6の補助アーム64と、可動アーム41との接続は、軸61によって軸止される。これによって、補助アーム部6は軸61を中心に回動可能となる。また、補助アーム64のほかの一端にはストッパー62が設けられており、ストッパー62と補助アーム64とは軸63によって軸止される。軸63は、補助アーム部6が傾けられた場合、ストッパー62が地面に密着するように、ストッパー62と補助アーム64との角度を調整する。可動アーム部4が傾けられた場合の補助アーム部6を示すのが図3である。
【0051】
次に、本発明のレーダ試験装置1で、点像の位置シフトが起こらないことを説明するが、それに先立ち、従来のレーダ試験装置300で、点像の位置シフトが起こる原理を説明する。
【0052】
図10に示すように、従来のレーダ試験装置300は、地球表面G付近に設置されている。レーダ試験装置300では、その内部のRF回路21などの制御回路の処理により、遅延時間Δtが発生する。そのため、図10に示すように、内部の遅延時間Δtによる遅延距離が発生するので、本来、レーダ試験装置300の点像位置はQとならなければいけないにもかかわらず、P(オフナディア角θoffの場合)、P’(オフナディア角θ’offの場合)に位置がシフトしてしまう。従って、従来のレーダ試験装置300の設置位置である点Qと、シフトした点像位置PやP’とは図11のような関係となってしまう。つまり、本来の点像位置Qとシフトした位置PやP’とは一致しない。
【0053】
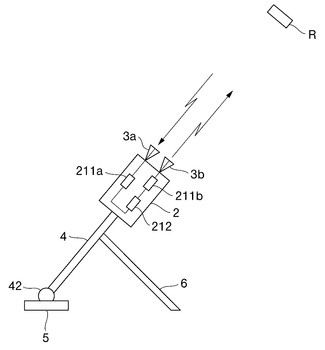
図4は本発明のレーダ試験装置1で点像の位置シフトが起こらない原理を説明する図である。図4に示すように、本発明のレーダ試験装置1の場合であってもRF回路21の処理により遅延時間Δtが発生するのは変わらない。しかし、従来のレーダ試験装置300とは異なり、レーダ試験装置1、とくにアンテナ部3は、所定の長さLを有している可動アーム部4および筐体2の上に設置されている。すなわち、レーダ試験装置1のアンテナ部3は、地球表面G付近に設置される従来のレーダ試験装置300のアンテナ301よりも、合成開口レーダR側に近づいて設置される。そのため、アンテナ部3を、可動アーム部4および筐体2上に設置しない従来のレーダ試験装置300の場合と比較して時間進みΔtを得ることが出来る。このように、レーダ試験装置1のアンテナ部3は所定の長さLを有する可動アーム部4上に設置することによって、レーダ試験装置1が有する時間遅れΔtを、レーダ試験装置1の設置位置による時間進みΔtで相殺できることとなる。図5は、本発明のレーダ試験装置1によるレーダ画像における点像位置を示す図である。図5における点Qはレーダ試験装置1の設置位置であり、点Pはレーダ試験装置1の点像位置であって、点Qと点Pは一致する。
【0054】
以上のような理由から、可動アーム部4における可動アーム41の長さLは、遅延時間Δtに基づく遅延距離に対応する長さである必要がある。つまり、可動アーム41の長さLは、以下の数1で表される。なお、本実施例では長さLとして、可動アーム41の長さとしたが、架台5からの長さ、筐体2やアンテナ部3の厚み、RF回路21の位置などを考慮した長さとしても良く、下記の数式で表されるLと厳密に一致していなくても良い。つまり、概略一致する程度でも良い。
【0055】
レーダ試験装置1の遅延時間をΔt、可動アーム41の長さL、cを光速(=3×108メートル/秒)とすると、長さLは、概略、
(数1)

で表される。
【0056】
レーダ試験装置1の遅延時間Δtを設計段階で予測し、その値を用いることも出来るが、レーダ試験装置1のRF回路21、アンテナ部3などを製作した後、実際にそれらを用いて遅延時間Δtを計測し、実測の遅延時間Δtに基づいて、長さLの可動アーム41を製作することで、より精度を高めることが可能となる。
【0057】
また、合成開口レーダRのオフナディア角θoffによってレーダ試験装置1の指向方向は変わる。しかし、その指向方向は可動アーム部4の設定角度をオフナディア角θoffに応じて所定の角度に変化させれば、たとえオフナディア角がθoffからθ’offに変化してもレーダ試験装置1の点像位置Pはシフトしないことになる。そこで合成開口レーダRのオフナディア角θoffに基づく、可動アーム41の傾き角は、以下の数2により示される。
【0058】
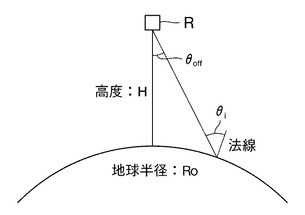
図12に合成開口レーダRのオフナディア角θoffと、可動アーム41の傾き角との関係を模式的に示す。合成開口レーダRを搭載した飛翔体の高度をH、地球の半径をR0、合成開口レーダRのオフナディア角をθoff、可動アーム41の法線方向からの傾き角をθiとした場合、合成開口レーダRのオフナディア角θoffと、可動アーム41の傾き角θiとの関係は、
(数2)
で表される。ここで、飛翔体の高度H、地球半径R0およびオフナディア角θoffは既知の値であるから、オフナディア角θoffが与えられれば、可動アーム41の傾き角θiは数2により算出できる。たとえば飛翔体の高度H=500キロメートル、オフナディア角θoffを30度とした場合、可動アーム41の法線方向からの傾き角θiは数2により32.6度となる。
【0059】
以上のように、レーダ試験装置1の長さLの可動アーム41を、数2で算出される法線方向からの傾き角θiで傾けることで、レーダ試験装置1の設置位置Qと点像位置Pとを一致させることが出来る。
【0060】
上述のように、筐体2、アンテナ部3、可動アーム41の傾きは手動で行っても良いが、コンピュータで傾きを制御する傾き制御部(図示せず)によって実現しても良い。傾き制御部は、傾き制御を行う箇所(上述の軸42など)に取り付け、上述の数2や数3により傾き角θiを算出し、モータや歯車を公知の方法で組み合わせることで、傾きを自動的に制御することが出来る。
【0061】
さらに、GPS受信機を用いてレーダ試験装置1が設置された可動アーム部4の架台5の設置位置の緯度および経度を計測しておけば、レーダ画像上の点像Pと緯度および経度との対応関係を関連付けることが出来る。そのため、本発明のレーダ試験装置1を用いることによって合成開口レーダ用の地上基準点を取得することができる。
【0062】
なお、レーダ試験装置1内の送信用アンテナ3bの位置が合成開口レーダRのアジマス方向(人工衛星の進行方向Sの方向)にオフセットして設置されている場合、オフセットを考慮して可動アーム部4の架台5の緯度・経度の計測を行う。
【実施例2】
【0063】
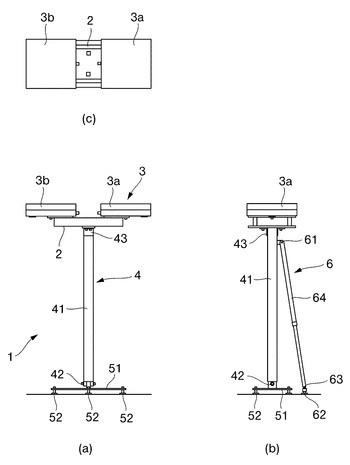
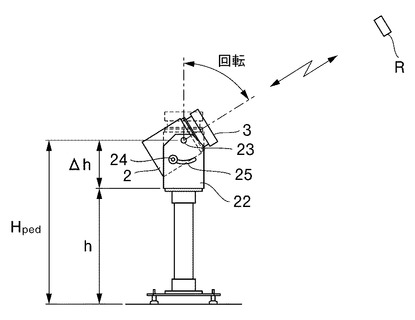
上述のレーダ試験装置1では可動アーム部4の長さLを利用して所定の時間進みΔtを得ていたが、図6に示すように、レーダ試験装置1の支持機構としてペデスタル7を用いることによって同等の機能を実現しても良い。図6(a)はペデスタル7を用いた場合のレーダ試験装置の正面図、図6(b)はペデスタル7を用いた場合のレーダ試験装置1の上面図、図6(c)はペデスタル7を用いた場合のレーダ試験装置1の側面図である。また、図7に、ペデスタル7を用いた場合のレーダ試験装置1の使用状態を模式的に示す。
【0064】
本実施例におけるレーダ試験装置1は、筐体2とアンテナ部3とペデスタル7と架台5とを有している。筐体2の内部には、実施例1と同様に、制御回路、好ましくはRF回路21が備えられており、アンテナ部3と電気的に接続している。
【0065】
筐体2の上面にはアンテナ部3が設けられている。なお、実施例1では平面アレータイプのアンテナを示したが、実施例2ではホーンタイプのアンテナを示している。アンテナ方式は、レーダ試験装置1の周波数帯に依存して、適宜、使い分けることが出来る。そのため、実施例1および実施例2は、いずれのタイプのアンテナを用いることが出来る。また、周波数帯に応じて、ほかのタイプのアンテナを用いることも出来る。
【0066】
筐体2を支持するために、地面に設置される架台5上のペデスタル7と筐体支持部22が接合している。筐体支持部22は、4つの側面のうち相対する1組の側面のみが形成された凹字形状であって、筐体支持部22の内側に筐体2を、軸23で軸止している。軸23は、筐体2の側面と、筐体支持部22の側面とを軸止する。そのため、軸23を中心として、筐体2を任意の方向に傾けることが出来る。すなわち、アンテナ部3を合成開口レーダRの方向に向けられる。
【0067】
また、筐体支持部22の側面に対向する筐体2の側面には、ボルトやナットなどの固定部材24が取り付けられる。固定部材24は、筐体支持部22の軸23を中心とした円弧上の溝25上に取り付けられる。すなわち、筐体支持部22に設けられた溝25のいずれかの位置に、筐体支持部22の上から溝25を挿通して固定部材24が筐体2に取り付けられることで、筐体2の傾き角度を、筐体支持部22の溝25の範囲に限定するとともに、筐体2が傾けられた状態を固定することが出来る。たとえば、固定部材24としてボルトとナットを用いた場合は、筐体2の内側面からボルトを外側面に貫通させて取り付け、ボルトを筐体支持部22の溝25から突出させる。そして筐体支持部22の外側面上からナットで当該ボルトの突出部分を締めることで筐体2を筐体支持部22に固定する。
【0068】
筐体支持部22はその底面において、地面に設置される架台5上のペデスタル7と接合している。筐体支持部22とペデスタル7との接合方法は如何なるものであっても良く、螺着、溶着などさまざまな接合方法を採ることが出来る。
【0069】
ペデスタル7は、地面から筐体支持部22までの高さhがある。また、ガススプリングなどの高さ調整機構によって上下方向に高さ調整が可能な支持機構であっても良い。
【0070】
まず、合成開口レーダ1のオフナディア角をθoffとした場合、アンテナ部3の法線方向からの傾きθiは、上述の数2で表される。また、地球表面Gから軸23までの高さHpedは、架台5を含むペデスタル7の高さhとペデスタル7から軸23までの高さΔhとの和で概略表され、すなわち高さHpedは、数3で概略表される。
(数3)
【0071】
なお、上述のΔhは、筐体2の内部に設置されるRF回路21の回路実装に依存する。また、数3から明らかなように、高さHpedは、合成開口レーダ1のオフナディア角θoffに依存して変化する。
【0072】
レーダ試験装置1の遅延時間Δtを設計段階で予測し、その値を用いることも出来るが、レーダ試験装置1のRF回路21、アンテナ部3などを製作した後、実際にそれらを用いて遅延時間Δtを計測し、実測の遅延時間Δtに基づいて、高さHpedを調整して製作することで、より精度を高めることが可能となる。
【実施例3】
【0073】
さらに、上述の各実施例におけるレーダ試験装置1のRF回路21では、もっとも単純な形態としたが、レーダ試験装置1の点像位置を任意のアジマス方向の位置にシフトさせたり、あるいは所定の速度で移動させるように構成することもできる。この場合のRF回路21の構成を図13に示す。
【0074】
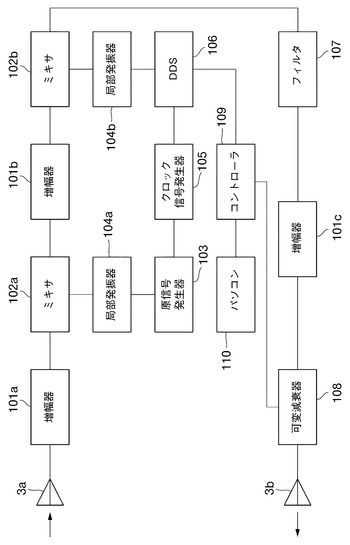
図13に本実施例のレーダ試験装置1の構成の一例を模式的に示す。本発明のレーダ試験装置1は、飛行機や人工衛星等の飛翔体に搭載された合成開口レーダ1との間で電波の送受信を行うアンテナ3と、受信信号の増幅を行う増幅器101と、受信信号の周波数変換を行うためのミキサ102と、種信号を生成する原信号発生器103(通常の高周波数信号を発生させる発振器を示す。例えば10MHz発振器などがある)と、ミキサ102へのローカル信号を与える局部発振器104と、原信号発生器103で発生した種信号に基づいてクロック信号を生成するクロック信号発生器105と、ローカル信号に周波数オフセットを与えるDDS(Direct Digital Synthesizer)106と、イメージ周波数を除去するフィルタ107と、レーダ断面積の設定を行う可変減衰器108と、DDS106ならびに可変減衰器108の制御を行うコントローラ109と、コントローラ109への指令を与えるパソコン110(コンピュータ端末であればよい)とを具備している。
【0075】
増幅器101、ミキサ102、原信号発生器103、局部発振器104、クロック信号発生器105、DDS106、フィルタ107、可変減衰器108、コントローラ109は、上述のRF回路21として構成されることが好ましく、これらの各機能は、筐体2の内部に設置される。また筐体2の外部にあるパソコン110と有線または無線により通信が可能である。
【0076】
飛行機や人工衛星等の飛翔体に搭載された合成開口レーダRからの電波は、地球表面Gに設置されたレーダ試験装置1内の受信用アンテナ3aで受信され、RF回路21における増幅器101aで所定レベルまで増幅された後、ミキサ102aに入力される。原信号発生器103からの種信号(原信号発生器103は、レーダ試験装置1の電源がオンになった時点で連続した高周波数信号を発生させ、それを原信号として用いる)を用いて局部発振器104aで生成されたローカル信号は、ミキサ102aに入力され、増幅器101aで増幅された受信信号と混合されて中間周波数f1にダウンコンバートされる。この受信信号は増幅器101bによって増幅されてからミキサ102bに入力される。
【0077】
一方、原信号発生器103からの種信号に基づきクロック信号発生器105で生成されたクロック信号はDDS106に入力され、DDS106で所定のオフセット周波数f0を有する信号を発生する。このオフセット周波数f0を有する信号は、局部発振器104bで周波数オフセットf0を伴ったローカル信号としてミキサ102bに入力され、前記中間周波数f1の受信信号と混合されてアップコンバートされる。
【0078】
例えば図14に示すような従来のレーダ試験装置10’では、移相器304により周波数オフセットを与えていたが、帯域内スプリアスの発生が否めなかった。そこで、本実施例のようにDDS106を用い、かつ中間周波数により周波数オフセットを行うことによって、帯域内スプリアスを防止することが可能となる。
【0079】
上述のようにアップコンバートされた受信信号は、合成開口レーダRからの受信信号に周波数オフセットf0を伴った受信信号となる。周波数オフセットf0を伴った受信信号は、フィルタ107に入力されて不要なイメージ周波数の成分が除去された後、増幅器101cで所定のレベルまで増幅される。そして、レーダ試験装置1のレーダ断面積が所定の値に設定されるよう可変減衰器108の減衰量の調整が行われた後、送信用アンテナ3bから合成開口レーダRに向けて電波が送信される。
【0080】
なお、レーダ試験装置1の周波数オフセット量並びに減衰量の制御は、コントローラ109によって行われるが、コントローラ109への制御指令はパソコン110から与えられる。
【0081】
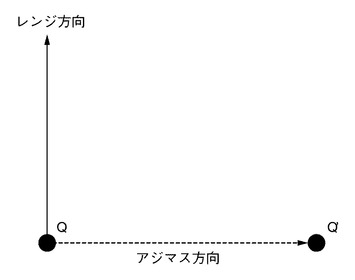
図13におけるRF回路21を用いたレーダ試験装置1は、パソコン110からの指令に基づいて、コントローラ109からの制御信号でDDS106を動作させることにより、図15に示すように、レーダ試験装置1が実際に設置された位置Qから位置Q’に見かけ上のレーダ試験装置1の位置をアジマス方向にシフトできる。
【0082】
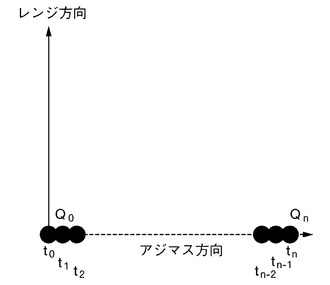
また、図13において、コントローラ109の制御によりDDS106で周波数オフセットf0の値が時間と共に所定の割合で変化させることにより、図16に示すように、レーダ試験装置1が設置された時刻t0の位置Q0から時刻tn後の見かけ上の位置Qのアジマス方向に、レーダ試験装置1が所定の速度であたかも移動しているかのような疑似移動体として動作させることもできる。
【0083】
以上のようなRF回路21を筐体2の内部に備えることによって、レーダ試験装置1自体が有する内部処理による遅延時間Δtによる初期オフセットを取り除いた上で、レーダ試験装置1の位置を任意のアジマス方向の位置にシフトさせることが出来る。またレーダ試験装置1が所定の速度であたかもアジマス方向に移動しているかのような擬似移動体として動作させることも出来る。
【産業上の利用可能性】
【0084】
本発明のレーダ試験装置によって、レーダ画像上でレンジ方向への位置のシフトが発生しないレーダ試験装置が可能となる。また、本発明のレーダ試験装置を、地上基準点としても使用可能となる。
【符号の説明】
【0085】
R:合成開口レーダ
G:地球表面
1:レーダ試験装置
2:筐体
3:アンテナ部
3a:受信用アンテナ
3b:送信用アンテナ
4:可動アーム部
5:架台
6:補助アーム部
7:ペデスタル
21:RF回路
41:可動アーム
42:軸
43:接合部
51:基盤
52:脚
61:軸
62:ストッパー
63:軸
64:補助アーム
101a〜101c:増幅器
102a、102b:ミキサ
103:原信号発生器
104a、104b:局部発振器
105:クロック信号発生器
106:DDS
107:フィルタ
108:可変減衰器
109:コントローラ
110:パソコン
211a、211b:増幅器
212:可変減衰器
300:従来のレーダ試験装置
301:アンテナ
302:増幅器
303:可変減衰器
304:移相器
305:移相器コントローラ
【技術分野】
【0001】
本発明は、航空機や人工衛星などの飛翔体に搭載された合成開口レーダが撮像したレーダ画像の絶対校正等に用いられるレーダ試験装置に関する。
【背景技術】
【0002】
合成開口レーダ(Synthetic Aperture Radar:SAR)のレーダ画像の絶対校正等にはレーダ試験装置が用いられている。図8に、人工衛星に搭載された合成開口レーダRと地球表面Gに設置された従来のレーダ試験装置300との関係を模式的に示す。なお、図8においてSは人工衛星の進行方向である。
【0003】
代表的なレーダ試験装置としては、図9に示すものが広く知られている。図9に示すレーダ試験装置300は、人工衛星に搭載された合成開口レーダRと地球表面Gに設置されたレーダ試験装置300との間でパルス電波の送受信を行うものであり、送受信を行うアンテナ301a、301bと、受信パルス信号の増幅を行う増幅器302a、302bと、レーダ試験装置300のレーダ断面積を設定する可変減衰器303とを具備している。
【0004】
人工衛星に搭載された合成開口レーダRからのパルス電波は、地球表面Gに設置されたレーダ試験装置300内の受信用アンテナ301aで受信されてから、増幅器302aで所定レベルまで増幅される。増幅された受信パルス信号は、レーダ試験装置300のレーダ断面積が所定の値に設定されるよう可変減衰器303の減衰量を調整する。その後、受信パルス信号は増幅器302bで所定レベルまで増幅された後、送信用アンテナ301bから合成開口レーダRに向けてパルス電波が送信される。
【0005】
また従来のレーダ試験装置の一例として、下記特許文献1に記載のレーダ試験装置がある。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2000−111642号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
上述の特許文献1や図9に示した従来のレーダ試験装置300では、その内部処理に処理時間を要し、パルス電波の受信から送信までに、遅延時間Δtが発生する。そしてレーダ試験装置300の遅延時間Δtの影響により、レーダ画像上に現れるレーダ試験装置300の点像位置がレンジ方向(人工衛星の進行方向(アジマス方向)に直交する方向)にシフト(ずれ)してしまう。これを図11に模式的に示す。図11では、点Qがレーダ試験装置300を設置した位置であるが、上述の遅延時間Δtの影響により、レーダ試験装置300の点像位置は点Pや点P’で示す位置にシフトして現れる。たとえばレーダ試験装置300における遅延時間Δtが10ナノ秒程度とすると、1メートルから2メートル前後の位置のシフトが発生してしまう。
【0008】
このような技術的課題に対して、レーダ試験装置300の内部のデジタル処理で遅延時間を補正する解決方法が存在するが、回路として複雑になってしまう問題がある。
【0009】
また、レーダ試験装置300の点像がシフトして現れる位置は、図10に示すように合成開口レーダRの観測時のオフナディア角θoffによって異なる。オフナディア角θoffの場合の点像位置は点Pに現れるが、オフナディア角θ’offの場合は点P’に現れる。
【0010】
従来のレーダ試験装置300ではレーダ試験装置300が有する遅延時間Δtが一定であっても、合成開口レーダRのオフナディア角θoffに依存してレーダ試験装置300の点像位置がレンジ方向の異なる位置にシフトしてしまう。そのため、レーダ試験装置300の点像を地上基準点(Ground Control Point:GCP)として使用する場合、幾何精度の低下が課題となり、レーダ試験装置300の遅延時間対策が必要となる技術的課題もある。
【課題を解決するための手段】
【0011】
そこで本発明者は上述の技術的課題に鑑み、等価的にレンジ方向への位置シフトを発生させないレーダ試験装置を発明した。
【0012】
第1の発明は、飛翔体に搭載された合成開口レーダの校正に用いるレーダ試験装置であって、前記レーダ試験装置は、前記合成開口レーダとの間でパルス電波の送受信を行うアンテナ部と、前記アンテナ部で受信したパルス信号に対する処理を実行する処理部と、を備えており、前記アンテナ部で受信したパルス信号に、前記処理部における遅延時間に対応する時間進みを与えることで、前記処理部における遅延時間を相殺する、レーダ試験装置である。
【0013】
本発明のように構成することで、レーダ試験装置の内部処理による遅延時間に基づく位置シフトを防止することが可能となる。
【0014】
上述の発明において、前記時間進みは、前記処理部における遅延時間に基づく遅延距離に概略一致する距離に前記アンテナ部を設けることで与えられる、レーダ試験装置のように構成することができる。
【0015】
上述の発明において、前記レーダ試験装置は、さらに、前記処理部における遅延時間に基づく遅延距離に概略一致する長さまたは高さを備えた支持機構を備えることで前記時間進みを与える、レーダ試験装置のように構成することができる。
【0016】
遅延時間については、遅延時間に基づく遅延距離だけ、合成開口レーダにアンテナ部を近づければ良い。そこで上述の発明のように構成することで、レーダ試験装置の内部処理による遅延時間に基づく位置シフトを防止することが可能となる。
【0017】
上述の発明において、前記支持機構は、前記支持機構の一端に備えられた軸を中心として回転可能な支持棒である可動アームであって、前記合成開口レーダのオフナディア角に基づいて前記可動アームの傾き角を算出し、法線に対して前記算出した傾き角で前記可動アームを傾けることで、レーダ画像における前記レーダ試験装置の点像位置のシフトを防止する、レーダ試験装置のように構成することができる。
【0018】
また上述の発明において、前記レーダ試験装置は、前記合成開口レーダのオフナディア角に基づいて、前記アンテナ部の傾き角を算出し、法線に対して前記算出した傾き角で前記アンテナ部を傾けることで、レーダ画像における前記レーダ試験装置の点像位置のシフトを防止する、レーダ試験装置のように構成することができる。
【0019】
レーダ試験装置のシフトする位置は、オフナディア角に依存する。そのため、地上基準点としてレーダ試験装置の位置を用いると精度が低下する。しかし、上述の発明のように構成することで、レーダ画像におけるレーダ試験装置の点像位置のシフトを防止できることから、精度の維持に繋がる。
【0020】
上述の発明において、前記レーダ試験装置は、さらに、前記可動アームと一端で接続しており、前記接続点において回転可能であって、前記可動アームが傾けられた場合に前記可動アームを支持する補助アームを備える、レーダ試験装置のように構成することができる。
【0021】
可動アームが傾けられると、回転の中心となる軸に負荷が発生し、軸の緩みなどが起こる可能性がある。そのため、上述の発明のように補助アームで支持することで、軸の緩みを防止できる。
【0022】
上述の発明において、前記支持機構は、その周囲に電波吸収材を取り付けている、レーダ試験装置のように構成することができる。
【0023】
また、上述の発明において、前記支持機構は、電波吸収材を含む素材により構成されている、レーダ試験装置のように構成することができる。
【0024】
可動アームのような支持機構を新たに備えることで、その部材自体の電波の反射の問題が発生する。これは精度の低下に繋がりかねない。そこで、上述の発明のように構成することで、かかる問題の発生を防止し、精度の維持を図ることが出来る。
【0025】
上述の発明において、前記支持機構は、前記合成開口レーダのオフナディア角に基づいて算出される高さを備えたペデスタルであって、前記合成開口レーダのオフナディア角に基づいて前記アンテナ部の傾き角を算出し、法線に対して前記算出した傾き角で前記アンテナ部を傾けることで、レーダ画像における前記レーダ試験装置の点像位置のシフトを防止する、レーダ試験装置のように構成することができる。
【0026】
遅延時間に基づく遅延距離を保つには、上述のようにアームのほか、本発明のようにペデスタルを用いることでも良い。この場合であっても同様の技術的効果を得ることが出来る。
【0027】
上述の発明において、前記処理部は、前記アンテナ部で受信したパルス信号を増幅する増幅器と、レーダ断面積の設定を行う可変減衰器と、を備えるレーダ試験装置のように構成することができる。
【0028】
処理部としては少なくとも上述のような機能を備えていることが好ましい。
【0029】
上述の発明は、飛翔体に搭載された合成開口レーダの校正に用いるレーダ試験装置であって、前記レーダ試験装置は、前記合成開口レーダとの間でパルス電波の送受信を行うアンテナ部と、前記アンテナ部で受信したパルス信号に対する処理を実行する処理部をその内部に備える筐体と、前記筐体と一端で接続しており、前記他の一端が、前記レーダ試験装置を支持する架台と接続しているアームと、を備えており、前記アームは、前記処理部における遅延時間に基づく遅延距離に概略一致する長さを有する、レーダ試験装置のように構成することができる。
【0030】
本発明のように構成することでも上述と同様の技術的効果を得ることが出来る。
【0031】
上述の発明において、前記アームは、前記筐体と接続する一端または前記架台と接続する一端で軸止されており、前記軸を中心として回転可能な可動アームであって、前記合成開口レーダのオフナディア角に基づいて算出された傾き角で前記可動アームを傾けることで、レーダ画像における前記レーダ試験装置の点像位置のシフトを防止する、レーダ試験装置のように構成することができる。
【0032】
レーダ試験装置のシフトする位置は、オフナディア角に依存する。そのため、地上基準点としてレーダ試験装置の位置を用いると精度が低下する。しかし、上述の発明のように構成することで、レーダ画像におけるレーダ試験装置の点像位置のシフトを防止できることから、精度の維持に繋がる。
【0033】
上述の発明において、飛翔体に搭載された合成開口レーダの校正に用いるレーダ試験装置であって、前記レーダ試験装置は、前記合成開口レーダとの間でパルス電波の送受信を行うアンテナ部と、前記アンテナ部で受信したパルス信号に対する処理を実行する処理部をその内部に備える筐体と、前記筐体と一端で接続しており、前記他の一端が、前記レーダ試験装置を支持する架台と接続しているペデスタルと、を備えており、前記ペデスタルは、前記処理部における遅延時間に基づく遅延距離に概略一致する高さを有する、レーダ試験装置のように構成することができる。
【0034】
本発明のように構成することでも上述と同様の技術的効果を得ることが出来る。
【発明の効果】
【0035】
本発明によって、レーダ画像上でレンジ方向への位置のシフトが発生しないレーダ試験装置が可能となる。また、本発明のレーダ試験装置を、地上基準点としても使用可能となる。
【図面の簡単な説明】
【0036】
【図1】本発明のレーダ試験装置の一例を示す図である。
【図2】本発明のレーダ試験装置のRF回路の機能も含めたレーダ試験装置の簡略構成図の一例である。
【図3】可動アーム部を傾けた状態の一例を示す図である。
【図4】本発明のレーダ試験装置で位置シフトが発生しないことの原理を説明する図である。
【図5】本発明のレーダ試験装置によるレーダ画像上で、点像の位置シフトが発生しないことを示す図である。
【図6】本発明のレーダ試験装置のほかの実施例の簡略外観図である。
【図7】実施例2におけるレーダ試験装置の使用状態を模式的に示す図である。
【図8】人工衛星に搭載された合成開口レーダと地球表面に設置された従来のレーダ試験装置との関係を模式的に示す図である。
【図9】従来のレーダ試験装置の構成の一例を示す図である。
【図10】従来のレーダ試験装置で位置シフトが発生することの原理を説明する図である。
【図11】従来のレーダ試験装置によるレーダ画像上で、点像の位置のシフトが発生することを示す図である。
【図12】合成開口レーダRのオフナディア角θoffと、可動アーム41の傾き角との関係を模式的に示す図である。
【図13】レーダ試験装置のレーダ画像上の位置をアジマス方向の任意の位置にシフトさせる、所定の速度で移動させるようにRF回路を構成した場合の一例を示す図である。
【図14】周波数オフセットを与える場合の従来のレーダ試験装置におけるRF回路の一例を示す図である。
【図15】レーダ試験装置のレーダ画像上の位置をアジマス方向の任意の位置にシフトさせた例を示す図である。
【図16】レーダ試験装置をアジマス方向に疑似移動体化させた例を示す図である。
【発明を実施するための形態】
【0037】
本発明のレーダ試験装置1は、従来のレーダ試験装置300のように地球表面Gに設置されるのではなく、レーダ試験装置1の信号処理を行う処理部などの制御回路による遅延時間に対応した時間進みを与えるように構成される。この時間進みは、たとえば、遅延時間に対応する遅延距離に概略一致する位置に、レーダ試験装置1の処理部やアンテナ部3を設けることで構成する。
【実施例1】
【0038】
図1に本発明のレーダ試験装置1の構成の一例を模式的に示す。図1(a)はレーダ試験装置1の正面図であり、図1(b)はレーダ試験装置1の側面図であり、図1(c)はレーダ試験装置1の上面図である。本発明のレーダ試験装置1では、長さLの可動アーム部(後述)を設けている。
【0039】
本発明のレーダ試験装置1では、筐体2とアンテナ部3と可動アーム部4と架台5と補助アーム部6とを有している。
【0040】
筐体2はレーダ試験装置1における信号処理を行う制御回路、好ましくはRF回路21をその内部に備えている。図2は筐体2の制御回路の機能を含めて、レーダ試験装置1の簡略構成図とともに模式的に示した図である。RF回路21には、少なくとも増幅器211a、可変減衰器212、増幅器211bを備えているが、その目的に応じてほかの装置を備えていても良い。なお以下の説明では、RF回路21の場合を説明するが、それ以外の回路であっても良い。
【0041】
筐体2の上面にはアンテナ部3を備えている。アンテナ部3は、飛行機や人工衛星等の飛翔体に搭載された合成開口レーダRとの間で電波の送受信を行う。アンテナ部3は、受信用アンテナ3a、送信用アンテナ3bを備えている。
【0042】
なおアンテナ部3とRF回路21とは筐体2の内部において電気的に接続されている。受信用アンテナ3aで受信したパルス電波は、RF回路21の増幅器211aで所定レベルまで受信パルス信号として増幅される。その後、RF回路21の可変減衰器212では、レーダ試験装置1のレーダ断面積が所定の値に設定されるよう減衰量を調整する。そして増幅器211bで所定レベルまで増幅され、受信用パルス信号が送信用アンテナ3bから合成開口レーダRに向けてパルス電波の形で送信される。
【0043】
また筐体2はその底面において、地面に設置される架台5上の可動アーム部4と接合している。筐体2と可動アーム部4との接合方法は如何なるものであっても良く、螺着、溶着などさまざまな接合方法を採ることが出来る。
【0044】
可動アーム部4は、筐体2およびアンテナ部3を支持する支持機構であって、可動アーム部4は、長さLの可動アーム41と軸42とを有している。
【0045】
可動アーム41の上方の一端は筐体2と接合部43で接続しており、他の一端は軸42を介して架台5と接続している。可動アーム41の筐体2と接続する端部は、接合部43で固定される。
【0046】
可動アーム41の架台5と接合する端部は、軸42で軸止され、軸42を中心に可動アーム部4が回動可能となることが好ましい。これによって、図3に示すように、軸42を中心として可動アーム部4が回動でき、結果としてアンテナ部3を任意の方向に傾けることが出来る。なお軸42は、平面に対して180度回動可能な軸でも良いし、空間の任意の方向に回動可能な軸であっても良い。前者の軸42の場合には可動アーム部4の一端に設けられた孔(図示せず)にピン(図示せず)を挿通し、固定することで、軸止することができる。後者の軸42の場合には、可動アーム部4の一端を球とし、それを球面上の軸受けで受けることで軸止することができる。なお、可動アーム部4の支持機構として図1では支持棒の場合を示したが、ペデスタル7のようなほかの支持機構であっても良い。なお、ペデスタル7の場合は後述する。
【0047】
可動アーム41の素材は鉄やアルミなどの金属製であっても良いし、グラファイト製であっても良い。素材としてグラファイトを用いた場合には、電波の影響を減らすことが出来るので好適である。また可動アーム41の周囲には電波吸収材を巻くことで電波の影響を減らしても良い。電波吸収材としては、たとえばゴムシート状のフェライトやカーボンなどがある。さらに、可動アーム41自体をグラファイト製のように、導電性電波吸収材、磁性電波吸収材などで構成しても良い。
【0048】
なお、上述の可動アーム41は、軸42を中心として回転可能になっているが、接合部43の代わりに、軸止めしても良い。この場合、当該軸を中心に、筐体2が傾けられることが好ましい。
【0049】
架台5は地面などに設置され、筐体2、アンテナ部3、可動アーム部4を支持する。架台5は基盤51と脚52とを備えている。脚52はその高さが調整可能となっていてもよい。また脚52は、基盤51に複数備えられている。これによって、地面が水平でない場合に、脚52の高さを調整することで、アンテナ部3を水平とすることが出来る。なお、脚52の代わりに車輪を用いても良い。また、電波の影響を減らすため、架台5、とくに基盤51を、可動アーム41と同様に、導電性電波吸収材、磁性電波吸収材などで構成することができる。たとえばグラファイト製とすることができる。また、電波吸収材を貼り付けることで電波の影響を減らしても良い。
【0050】
補助アーム部6は、上方の一端が可動アーム部4と接続しており、ほかの一端は地面と接することで、可動アーム部4を傾けた場合に、筐体部2、アンテナ部3、可動アーム部4を支持する。補助アーム部6は、補助アーム64と軸61と軸63とストッパー62とを備えている。補助アーム64は、その長さが伸縮自在であると良い。可動アーム部4が傾けられた場合に補助アーム64の長さを調整するためである。補助アーム部6の補助アーム64と、可動アーム41との接続は、軸61によって軸止される。これによって、補助アーム部6は軸61を中心に回動可能となる。また、補助アーム64のほかの一端にはストッパー62が設けられており、ストッパー62と補助アーム64とは軸63によって軸止される。軸63は、補助アーム部6が傾けられた場合、ストッパー62が地面に密着するように、ストッパー62と補助アーム64との角度を調整する。可動アーム部4が傾けられた場合の補助アーム部6を示すのが図3である。
【0051】
次に、本発明のレーダ試験装置1で、点像の位置シフトが起こらないことを説明するが、それに先立ち、従来のレーダ試験装置300で、点像の位置シフトが起こる原理を説明する。
【0052】
図10に示すように、従来のレーダ試験装置300は、地球表面G付近に設置されている。レーダ試験装置300では、その内部のRF回路21などの制御回路の処理により、遅延時間Δtが発生する。そのため、図10に示すように、内部の遅延時間Δtによる遅延距離が発生するので、本来、レーダ試験装置300の点像位置はQとならなければいけないにもかかわらず、P(オフナディア角θoffの場合)、P’(オフナディア角θ’offの場合)に位置がシフトしてしまう。従って、従来のレーダ試験装置300の設置位置である点Qと、シフトした点像位置PやP’とは図11のような関係となってしまう。つまり、本来の点像位置Qとシフトした位置PやP’とは一致しない。
【0053】
図4は本発明のレーダ試験装置1で点像の位置シフトが起こらない原理を説明する図である。図4に示すように、本発明のレーダ試験装置1の場合であってもRF回路21の処理により遅延時間Δtが発生するのは変わらない。しかし、従来のレーダ試験装置300とは異なり、レーダ試験装置1、とくにアンテナ部3は、所定の長さLを有している可動アーム部4および筐体2の上に設置されている。すなわち、レーダ試験装置1のアンテナ部3は、地球表面G付近に設置される従来のレーダ試験装置300のアンテナ301よりも、合成開口レーダR側に近づいて設置される。そのため、アンテナ部3を、可動アーム部4および筐体2上に設置しない従来のレーダ試験装置300の場合と比較して時間進みΔtを得ることが出来る。このように、レーダ試験装置1のアンテナ部3は所定の長さLを有する可動アーム部4上に設置することによって、レーダ試験装置1が有する時間遅れΔtを、レーダ試験装置1の設置位置による時間進みΔtで相殺できることとなる。図5は、本発明のレーダ試験装置1によるレーダ画像における点像位置を示す図である。図5における点Qはレーダ試験装置1の設置位置であり、点Pはレーダ試験装置1の点像位置であって、点Qと点Pは一致する。
【0054】
以上のような理由から、可動アーム部4における可動アーム41の長さLは、遅延時間Δtに基づく遅延距離に対応する長さである必要がある。つまり、可動アーム41の長さLは、以下の数1で表される。なお、本実施例では長さLとして、可動アーム41の長さとしたが、架台5からの長さ、筐体2やアンテナ部3の厚み、RF回路21の位置などを考慮した長さとしても良く、下記の数式で表されるLと厳密に一致していなくても良い。つまり、概略一致する程度でも良い。
【0055】
レーダ試験装置1の遅延時間をΔt、可動アーム41の長さL、cを光速(=3×108メートル/秒)とすると、長さLは、概略、
(数1)
で表される。
【0056】
レーダ試験装置1の遅延時間Δtを設計段階で予測し、その値を用いることも出来るが、レーダ試験装置1のRF回路21、アンテナ部3などを製作した後、実際にそれらを用いて遅延時間Δtを計測し、実測の遅延時間Δtに基づいて、長さLの可動アーム41を製作することで、より精度を高めることが可能となる。
【0057】
また、合成開口レーダRのオフナディア角θoffによってレーダ試験装置1の指向方向は変わる。しかし、その指向方向は可動アーム部4の設定角度をオフナディア角θoffに応じて所定の角度に変化させれば、たとえオフナディア角がθoffからθ’offに変化してもレーダ試験装置1の点像位置Pはシフトしないことになる。そこで合成開口レーダRのオフナディア角θoffに基づく、可動アーム41の傾き角は、以下の数2により示される。
【0058】
図12に合成開口レーダRのオフナディア角θoffと、可動アーム41の傾き角との関係を模式的に示す。合成開口レーダRを搭載した飛翔体の高度をH、地球の半径をR0、合成開口レーダRのオフナディア角をθoff、可動アーム41の法線方向からの傾き角をθiとした場合、合成開口レーダRのオフナディア角θoffと、可動アーム41の傾き角θiとの関係は、
(数2)
で表される。ここで、飛翔体の高度H、地球半径R0およびオフナディア角θoffは既知の値であるから、オフナディア角θoffが与えられれば、可動アーム41の傾き角θiは数2により算出できる。たとえば飛翔体の高度H=500キロメートル、オフナディア角θoffを30度とした場合、可動アーム41の法線方向からの傾き角θiは数2により32.6度となる。
【0059】
以上のように、レーダ試験装置1の長さLの可動アーム41を、数2で算出される法線方向からの傾き角θiで傾けることで、レーダ試験装置1の設置位置Qと点像位置Pとを一致させることが出来る。
【0060】
上述のように、筐体2、アンテナ部3、可動アーム41の傾きは手動で行っても良いが、コンピュータで傾きを制御する傾き制御部(図示せず)によって実現しても良い。傾き制御部は、傾き制御を行う箇所(上述の軸42など)に取り付け、上述の数2や数3により傾き角θiを算出し、モータや歯車を公知の方法で組み合わせることで、傾きを自動的に制御することが出来る。
【0061】
さらに、GPS受信機を用いてレーダ試験装置1が設置された可動アーム部4の架台5の設置位置の緯度および経度を計測しておけば、レーダ画像上の点像Pと緯度および経度との対応関係を関連付けることが出来る。そのため、本発明のレーダ試験装置1を用いることによって合成開口レーダ用の地上基準点を取得することができる。
【0062】
なお、レーダ試験装置1内の送信用アンテナ3bの位置が合成開口レーダRのアジマス方向(人工衛星の進行方向Sの方向)にオフセットして設置されている場合、オフセットを考慮して可動アーム部4の架台5の緯度・経度の計測を行う。
【実施例2】
【0063】
上述のレーダ試験装置1では可動アーム部4の長さLを利用して所定の時間進みΔtを得ていたが、図6に示すように、レーダ試験装置1の支持機構としてペデスタル7を用いることによって同等の機能を実現しても良い。図6(a)はペデスタル7を用いた場合のレーダ試験装置の正面図、図6(b)はペデスタル7を用いた場合のレーダ試験装置1の上面図、図6(c)はペデスタル7を用いた場合のレーダ試験装置1の側面図である。また、図7に、ペデスタル7を用いた場合のレーダ試験装置1の使用状態を模式的に示す。
【0064】
本実施例におけるレーダ試験装置1は、筐体2とアンテナ部3とペデスタル7と架台5とを有している。筐体2の内部には、実施例1と同様に、制御回路、好ましくはRF回路21が備えられており、アンテナ部3と電気的に接続している。
【0065】
筐体2の上面にはアンテナ部3が設けられている。なお、実施例1では平面アレータイプのアンテナを示したが、実施例2ではホーンタイプのアンテナを示している。アンテナ方式は、レーダ試験装置1の周波数帯に依存して、適宜、使い分けることが出来る。そのため、実施例1および実施例2は、いずれのタイプのアンテナを用いることが出来る。また、周波数帯に応じて、ほかのタイプのアンテナを用いることも出来る。
【0066】
筐体2を支持するために、地面に設置される架台5上のペデスタル7と筐体支持部22が接合している。筐体支持部22は、4つの側面のうち相対する1組の側面のみが形成された凹字形状であって、筐体支持部22の内側に筐体2を、軸23で軸止している。軸23は、筐体2の側面と、筐体支持部22の側面とを軸止する。そのため、軸23を中心として、筐体2を任意の方向に傾けることが出来る。すなわち、アンテナ部3を合成開口レーダRの方向に向けられる。
【0067】
また、筐体支持部22の側面に対向する筐体2の側面には、ボルトやナットなどの固定部材24が取り付けられる。固定部材24は、筐体支持部22の軸23を中心とした円弧上の溝25上に取り付けられる。すなわち、筐体支持部22に設けられた溝25のいずれかの位置に、筐体支持部22の上から溝25を挿通して固定部材24が筐体2に取り付けられることで、筐体2の傾き角度を、筐体支持部22の溝25の範囲に限定するとともに、筐体2が傾けられた状態を固定することが出来る。たとえば、固定部材24としてボルトとナットを用いた場合は、筐体2の内側面からボルトを外側面に貫通させて取り付け、ボルトを筐体支持部22の溝25から突出させる。そして筐体支持部22の外側面上からナットで当該ボルトの突出部分を締めることで筐体2を筐体支持部22に固定する。
【0068】
筐体支持部22はその底面において、地面に設置される架台5上のペデスタル7と接合している。筐体支持部22とペデスタル7との接合方法は如何なるものであっても良く、螺着、溶着などさまざまな接合方法を採ることが出来る。
【0069】
ペデスタル7は、地面から筐体支持部22までの高さhがある。また、ガススプリングなどの高さ調整機構によって上下方向に高さ調整が可能な支持機構であっても良い。
【0070】
まず、合成開口レーダ1のオフナディア角をθoffとした場合、アンテナ部3の法線方向からの傾きθiは、上述の数2で表される。また、地球表面Gから軸23までの高さHpedは、架台5を含むペデスタル7の高さhとペデスタル7から軸23までの高さΔhとの和で概略表され、すなわち高さHpedは、数3で概略表される。
(数3)
【0071】
なお、上述のΔhは、筐体2の内部に設置されるRF回路21の回路実装に依存する。また、数3から明らかなように、高さHpedは、合成開口レーダ1のオフナディア角θoffに依存して変化する。
【0072】
レーダ試験装置1の遅延時間Δtを設計段階で予測し、その値を用いることも出来るが、レーダ試験装置1のRF回路21、アンテナ部3などを製作した後、実際にそれらを用いて遅延時間Δtを計測し、実測の遅延時間Δtに基づいて、高さHpedを調整して製作することで、より精度を高めることが可能となる。
【実施例3】
【0073】
さらに、上述の各実施例におけるレーダ試験装置1のRF回路21では、もっとも単純な形態としたが、レーダ試験装置1の点像位置を任意のアジマス方向の位置にシフトさせたり、あるいは所定の速度で移動させるように構成することもできる。この場合のRF回路21の構成を図13に示す。
【0074】
図13に本実施例のレーダ試験装置1の構成の一例を模式的に示す。本発明のレーダ試験装置1は、飛行機や人工衛星等の飛翔体に搭載された合成開口レーダ1との間で電波の送受信を行うアンテナ3と、受信信号の増幅を行う増幅器101と、受信信号の周波数変換を行うためのミキサ102と、種信号を生成する原信号発生器103(通常の高周波数信号を発生させる発振器を示す。例えば10MHz発振器などがある)と、ミキサ102へのローカル信号を与える局部発振器104と、原信号発生器103で発生した種信号に基づいてクロック信号を生成するクロック信号発生器105と、ローカル信号に周波数オフセットを与えるDDS(Direct Digital Synthesizer)106と、イメージ周波数を除去するフィルタ107と、レーダ断面積の設定を行う可変減衰器108と、DDS106ならびに可変減衰器108の制御を行うコントローラ109と、コントローラ109への指令を与えるパソコン110(コンピュータ端末であればよい)とを具備している。
【0075】
増幅器101、ミキサ102、原信号発生器103、局部発振器104、クロック信号発生器105、DDS106、フィルタ107、可変減衰器108、コントローラ109は、上述のRF回路21として構成されることが好ましく、これらの各機能は、筐体2の内部に設置される。また筐体2の外部にあるパソコン110と有線または無線により通信が可能である。
【0076】
飛行機や人工衛星等の飛翔体に搭載された合成開口レーダRからの電波は、地球表面Gに設置されたレーダ試験装置1内の受信用アンテナ3aで受信され、RF回路21における増幅器101aで所定レベルまで増幅された後、ミキサ102aに入力される。原信号発生器103からの種信号(原信号発生器103は、レーダ試験装置1の電源がオンになった時点で連続した高周波数信号を発生させ、それを原信号として用いる)を用いて局部発振器104aで生成されたローカル信号は、ミキサ102aに入力され、増幅器101aで増幅された受信信号と混合されて中間周波数f1にダウンコンバートされる。この受信信号は増幅器101bによって増幅されてからミキサ102bに入力される。
【0077】
一方、原信号発生器103からの種信号に基づきクロック信号発生器105で生成されたクロック信号はDDS106に入力され、DDS106で所定のオフセット周波数f0を有する信号を発生する。このオフセット周波数f0を有する信号は、局部発振器104bで周波数オフセットf0を伴ったローカル信号としてミキサ102bに入力され、前記中間周波数f1の受信信号と混合されてアップコンバートされる。
【0078】
例えば図14に示すような従来のレーダ試験装置10’では、移相器304により周波数オフセットを与えていたが、帯域内スプリアスの発生が否めなかった。そこで、本実施例のようにDDS106を用い、かつ中間周波数により周波数オフセットを行うことによって、帯域内スプリアスを防止することが可能となる。
【0079】
上述のようにアップコンバートされた受信信号は、合成開口レーダRからの受信信号に周波数オフセットf0を伴った受信信号となる。周波数オフセットf0を伴った受信信号は、フィルタ107に入力されて不要なイメージ周波数の成分が除去された後、増幅器101cで所定のレベルまで増幅される。そして、レーダ試験装置1のレーダ断面積が所定の値に設定されるよう可変減衰器108の減衰量の調整が行われた後、送信用アンテナ3bから合成開口レーダRに向けて電波が送信される。
【0080】
なお、レーダ試験装置1の周波数オフセット量並びに減衰量の制御は、コントローラ109によって行われるが、コントローラ109への制御指令はパソコン110から与えられる。
【0081】
図13におけるRF回路21を用いたレーダ試験装置1は、パソコン110からの指令に基づいて、コントローラ109からの制御信号でDDS106を動作させることにより、図15に示すように、レーダ試験装置1が実際に設置された位置Qから位置Q’に見かけ上のレーダ試験装置1の位置をアジマス方向にシフトできる。
【0082】
また、図13において、コントローラ109の制御によりDDS106で周波数オフセットf0の値が時間と共に所定の割合で変化させることにより、図16に示すように、レーダ試験装置1が設置された時刻t0の位置Q0から時刻tn後の見かけ上の位置Qのアジマス方向に、レーダ試験装置1が所定の速度であたかも移動しているかのような疑似移動体として動作させることもできる。
【0083】
以上のようなRF回路21を筐体2の内部に備えることによって、レーダ試験装置1自体が有する内部処理による遅延時間Δtによる初期オフセットを取り除いた上で、レーダ試験装置1の位置を任意のアジマス方向の位置にシフトさせることが出来る。またレーダ試験装置1が所定の速度であたかもアジマス方向に移動しているかのような擬似移動体として動作させることも出来る。
【産業上の利用可能性】
【0084】
本発明のレーダ試験装置によって、レーダ画像上でレンジ方向への位置のシフトが発生しないレーダ試験装置が可能となる。また、本発明のレーダ試験装置を、地上基準点としても使用可能となる。
【符号の説明】
【0085】
R:合成開口レーダ
G:地球表面
1:レーダ試験装置
2:筐体
3:アンテナ部
3a:受信用アンテナ
3b:送信用アンテナ
4:可動アーム部
5:架台
6:補助アーム部
7:ペデスタル
21:RF回路
41:可動アーム
42:軸
43:接合部
51:基盤
52:脚
61:軸
62:ストッパー
63:軸
64:補助アーム
101a〜101c:増幅器
102a、102b:ミキサ
103:原信号発生器
104a、104b:局部発振器
105:クロック信号発生器
106:DDS
107:フィルタ
108:可変減衰器
109:コントローラ
110:パソコン
211a、211b:増幅器
212:可変減衰器
300:従来のレーダ試験装置
301:アンテナ
302:増幅器
303:可変減衰器
304:移相器
305:移相器コントローラ
【特許請求の範囲】
【請求項1】
飛翔体に搭載された合成開口レーダの校正に用いるレーダ試験装置であって、
前記レーダ試験装置は、
前記合成開口レーダとの間でパルス電波の送受信を行うアンテナ部と、
前記アンテナ部で受信したパルス信号に対する処理を実行する処理部と、を備えており、
前記アンテナ部で受信したパルス信号に、前記処理部における遅延時間に対応する時間進みを与えることで、前記処理部における遅延時間を相殺する、
ことを特徴とするレーダ試験装置。
【請求項2】
前記時間進みは、
前記処理部における遅延時間に基づく遅延距離に概略一致する距離に前記アンテナ部を設けることで与えられる、
ことを特徴とする請求項1に記載のレーダ試験装置。
【請求項3】
前記レーダ試験装置は、さらに、前記処理部における遅延時間に基づく遅延距離に概略一致する長さまたは高さを備えた支持機構を備えることで前記時間進みを与える、
ことを特徴とする請求項1または請求項2に記載のレーダ試験装置。
【請求項4】
前記支持機構は、前記支持機構の一端に備えられた軸を中心として回転可能な支持棒である可動アームであって、
前記合成開口レーダのオフナディア角に基づいて前記可動アームの傾き角を算出し、法線に対して前記算出した傾き角で前記可動アームを傾けることで、レーダ画像における前記レーダ試験装置の点像位置のシフトを防止する、
ことを特徴とする請求項3に記載のレーダ試験装置。
【請求項5】
前記レーダ試験装置は、
前記合成開口レーダのオフナディア角に基づいて、前記アンテナ部の傾き角を算出し、法線に対して前記算出した傾き角で前記アンテナ部を傾けることで、レーダ画像における前記レーダ試験装置の点像位置のシフトを防止する、
ことを特徴とする請求項1から請求項3のいずれかに記載のレーダ試験装置。
【請求項6】
前記レーダ試験装置は、さらに、
前記可動アームと一端で接続しており、前記接続点において回転可能であって、前記可動アームが傾けられた場合に前記可動アームを支持する補助アームを備える、
ことを特徴とする請求項4または請求項5に記載のレーダ試験装置。
【請求項7】
前記支持機構は、その周囲に電波吸収材を取り付けている、
ことを特徴とする請求項1から請求項5のいずれかに記載のレーダ試験装置。
【請求項8】
前記支持機構は、電波吸収材を含む素材により構成されている、
ことを特徴とする請求項1から請求項5のいずれかに記載のレーダ試験装置。
【請求項9】
前記支持機構は、前記合成開口レーダのオフナディア角に基づいて算出される高さを備えたペデスタルであって、
前記合成開口レーダのオフナディア角に基づいて前記アンテナ部の傾き角を算出し、法線に対して前記算出した傾き角で前記アンテナ部を傾けることで、レーダ画像における前記レーダ試験装置の点像位置のシフトを防止する、
ことを特徴とする請求項3に記載のレーダ試験装置。
【請求項10】
前記処理部は、
前記アンテナ部で受信したパルス信号を増幅する増幅器と、
レーダ断面積の設定を行う可変減衰器と、を備える
ことを特徴とする請求項1から請求項9のいずれかに記載のレーダ試験装置。
【請求項11】
飛翔体に搭載された合成開口レーダの校正に用いるレーダ試験装置であって、
前記レーダ試験装置は、
前記合成開口レーダとの間でパルス電波の送受信を行うアンテナ部と、
前記アンテナ部で受信したパルス信号に対する処理を実行する処理部をその内部に備える筐体と、
前記筐体と一端で接続しており、前記他の一端が、前記レーダ試験装置を支持する架台と接続しているアームと、を備えており、
前記アームは、
前記処理部における遅延時間に基づく遅延距離に概略一致する長さを有する、
ことを特徴とするレーダ試験装置。
【請求項12】
前記アームは、前記筐体と接続する一端または前記架台と接続する一端で軸止されており、前記軸を中心として回転可能な可動アームであって、
前記合成開口レーダのオフナディア角に基づいて算出された傾き角で前記可動アームを傾けることで、レーダ画像における前記レーダ試験装置の点像位置のシフトを防止する、
ことを特徴とする請求項11に記載のレーダ試験装置。
【請求項13】
飛翔体に搭載された合成開口レーダの校正に用いるレーダ試験装置であって、
前記レーダ試験装置は、
前記合成開口レーダとの間でパルス電波の送受信を行うアンテナ部と、
前記アンテナ部で受信したパルス信号に対する処理を実行する処理部をその内部に備える筐体と、
前記筐体と一端で接続しており、前記他の一端が、前記レーダ試験装置を支持する架台と接続しているペデスタルと、を備えており、
前記ペデスタルは、
前記処理部における遅延時間に基づく遅延距離に概略一致する高さを有する、
ことを特徴とするレーダ試験装置。
【請求項1】
飛翔体に搭載された合成開口レーダの校正に用いるレーダ試験装置であって、
前記レーダ試験装置は、
前記合成開口レーダとの間でパルス電波の送受信を行うアンテナ部と、
前記アンテナ部で受信したパルス信号に対する処理を実行する処理部と、を備えており、
前記アンテナ部で受信したパルス信号に、前記処理部における遅延時間に対応する時間進みを与えることで、前記処理部における遅延時間を相殺する、
ことを特徴とするレーダ試験装置。
【請求項2】
前記時間進みは、
前記処理部における遅延時間に基づく遅延距離に概略一致する距離に前記アンテナ部を設けることで与えられる、
ことを特徴とする請求項1に記載のレーダ試験装置。
【請求項3】
前記レーダ試験装置は、さらに、前記処理部における遅延時間に基づく遅延距離に概略一致する長さまたは高さを備えた支持機構を備えることで前記時間進みを与える、
ことを特徴とする請求項1または請求項2に記載のレーダ試験装置。
【請求項4】
前記支持機構は、前記支持機構の一端に備えられた軸を中心として回転可能な支持棒である可動アームであって、
前記合成開口レーダのオフナディア角に基づいて前記可動アームの傾き角を算出し、法線に対して前記算出した傾き角で前記可動アームを傾けることで、レーダ画像における前記レーダ試験装置の点像位置のシフトを防止する、
ことを特徴とする請求項3に記載のレーダ試験装置。
【請求項5】
前記レーダ試験装置は、
前記合成開口レーダのオフナディア角に基づいて、前記アンテナ部の傾き角を算出し、法線に対して前記算出した傾き角で前記アンテナ部を傾けることで、レーダ画像における前記レーダ試験装置の点像位置のシフトを防止する、
ことを特徴とする請求項1から請求項3のいずれかに記載のレーダ試験装置。
【請求項6】
前記レーダ試験装置は、さらに、
前記可動アームと一端で接続しており、前記接続点において回転可能であって、前記可動アームが傾けられた場合に前記可動アームを支持する補助アームを備える、
ことを特徴とする請求項4または請求項5に記載のレーダ試験装置。
【請求項7】
前記支持機構は、その周囲に電波吸収材を取り付けている、
ことを特徴とする請求項1から請求項5のいずれかに記載のレーダ試験装置。
【請求項8】
前記支持機構は、電波吸収材を含む素材により構成されている、
ことを特徴とする請求項1から請求項5のいずれかに記載のレーダ試験装置。
【請求項9】
前記支持機構は、前記合成開口レーダのオフナディア角に基づいて算出される高さを備えたペデスタルであって、
前記合成開口レーダのオフナディア角に基づいて前記アンテナ部の傾き角を算出し、法線に対して前記算出した傾き角で前記アンテナ部を傾けることで、レーダ画像における前記レーダ試験装置の点像位置のシフトを防止する、
ことを特徴とする請求項3に記載のレーダ試験装置。
【請求項10】
前記処理部は、
前記アンテナ部で受信したパルス信号を増幅する増幅器と、
レーダ断面積の設定を行う可変減衰器と、を備える
ことを特徴とする請求項1から請求項9のいずれかに記載のレーダ試験装置。
【請求項11】
飛翔体に搭載された合成開口レーダの校正に用いるレーダ試験装置であって、
前記レーダ試験装置は、
前記合成開口レーダとの間でパルス電波の送受信を行うアンテナ部と、
前記アンテナ部で受信したパルス信号に対する処理を実行する処理部をその内部に備える筐体と、
前記筐体と一端で接続しており、前記他の一端が、前記レーダ試験装置を支持する架台と接続しているアームと、を備えており、
前記アームは、
前記処理部における遅延時間に基づく遅延距離に概略一致する長さを有する、
ことを特徴とするレーダ試験装置。
【請求項12】
前記アームは、前記筐体と接続する一端または前記架台と接続する一端で軸止されており、前記軸を中心として回転可能な可動アームであって、
前記合成開口レーダのオフナディア角に基づいて算出された傾き角で前記可動アームを傾けることで、レーダ画像における前記レーダ試験装置の点像位置のシフトを防止する、
ことを特徴とする請求項11に記載のレーダ試験装置。
【請求項13】
飛翔体に搭載された合成開口レーダの校正に用いるレーダ試験装置であって、
前記レーダ試験装置は、
前記合成開口レーダとの間でパルス電波の送受信を行うアンテナ部と、
前記アンテナ部で受信したパルス信号に対する処理を実行する処理部をその内部に備える筐体と、
前記筐体と一端で接続しており、前記他の一端が、前記レーダ試験装置を支持する架台と接続しているペデスタルと、を備えており、
前記ペデスタルは、
前記処理部における遅延時間に基づく遅延距離に概略一致する高さを有する、
ことを特徴とするレーダ試験装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2012−208034(P2012−208034A)
【公開日】平成24年10月25日(2012.10.25)
【国際特許分類】
【出願番号】特願2011−74405(P2011−74405)
【出願日】平成23年3月30日(2011.3.30)
【特許番号】特許第4812904号(P4812904)
【特許公報発行日】平成23年11月9日(2011.11.9)
【出願人】(598022646)一般財団法人 リモート・センシング技術センター (2)
【Fターム(参考)】
【公開日】平成24年10月25日(2012.10.25)
【国際特許分類】
【出願日】平成23年3月30日(2011.3.30)
【特許番号】特許第4812904号(P4812904)
【特許公報発行日】平成23年11月9日(2011.11.9)
【出願人】(598022646)一般財団法人 リモート・センシング技術センター (2)
【Fターム(参考)】
[ Back to top ]