
レーダ追跡装置及びその方法
追跡の測定値を極座標系から直交座標系に変換することによって発生するレーダ測定値の測定誤差共分散の変化を基に、α−β追跡フィルタのα及びβフィルタ利得を求めるための追跡指数を計算する追跡指数部、及び追跡指数変化率に対するα及びβフィルタ利得の変化率の偏微分係数と追跡指数変化量とを基に、α及びβフィルタ利得の変化量を計算し、α及びβフィルタ利得を更新するフィルタ利得更新部を具備するα−β追跡フィルタを有するレーダ追跡装置である。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、レーダ追跡装置及びその方法に係り、さらに詳細には、測定値の誤差特性変化を考慮してα−β利得を更新するレーダ追跡装置及びその方法に関する。
【0002】
すなわち本発明は、直交座標系に変換されたレーダ測定値から測定誤差共分散を計算し、これを利用して追跡指数の変化量、α−β利得変化量計算及びα−β利得を更新するレーダ追跡装置及びその方法に関する。
【背景技術】
【0003】
レーダを利用した追跡装置は、軍事用目的だけではなく、港湾及び大型船舶などで主に使われてきた。しかし、最近には、車両の衝突防止分野にまでその利用分野が拡大されている。
【0004】
レーダ追跡装置には、α−βフィルタ、カルマン(Kalman)フィルタなどが使われており、特に、数十〜数百の標的を同時に追跡しなければならないTWS(Track−While−Scan)追跡装置では、α−βフィルタが広範囲に使われている。
【0005】
α−βフィルタは、他の追跡方法に比べて演算量が非常に少ないために、リアルタイムで多数の標的を追跡せねばならないTWS追跡装置に適するためである。しかし、直交座標系に変換されたレーダ測定値は、標的の距離及び方位によって測定誤差の特性が変わるので、これを考慮したα−β利得の更新が必要である。
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明がなそうとする技術的課題は、レーダ測定値を利用して物標に対する追跡を行う場合、レーダ測定値の誤差特性変化を考慮して追跡フィルタの利得を更新することによって、さらに向上した追跡性能を提供するところにある。
【課題を解決するための手段】
【0007】
前記技術的課題をなすための本発明によるレーダ追跡装置の一実施例は、追跡の測定値を極座標系から直交座標系に変換することによって発生するレーダ測定値の測定誤差共分散の変化を基に、α−β追跡フィルタのα及びβフィルタ利得を求めるための追跡指数を計算する追跡指数部、及び追跡指数変化率に対するα及びβフィルタ利得の変化率の偏微分係数と追跡指数変化量とを基にα及びβフィルタ利得の変化量を計算し、α及びβフィルタ利得を更新するフィルタ利得更新部を具備するα−β追跡フィルタを有する。
【0008】
前記技術的課題をなすための本発明によるレーダ追跡装置の一実施例は、追跡の測定値を極座標系から直交座標系に変換することによって発生するレーダ測定値の測定誤差共分散の変化を基に、α−β追跡フィルタのα及びβフィルタ利得を求めるための追跡指数を計算する追跡指数の計算段階、及び追跡指数変化率に対するα及びβフィルタ利得の変化率の偏微分係数と追跡指数変化量とを基にα及びβフィルタ利得の変化量を計算し、α及びβフィルタ利得を更新するフィルタ利得の更新段階を有する。
【発明の効果】
【0009】
本発明は、レーダ測定値を利用した追跡装置において、測定誤差の特性変化によって追跡フィルタの利得を更新することによって、向上した追跡性能を提供する。
【0010】
このように本発明は、軍事用レーダ;港湾などの船舶の航路誘導及び統制のためのレーダ;航空機、船舶及び車両などの衝突防止のためのレーダのような多様な目的のレーダに使われうる。
【図面の簡単な説明】
【0011】
【図1】本発明の望ましい一実施例によるレーダ追跡装置を示す図面である。
【図2】本発明の望ましい一実施例によるレーダ追跡装置で使用する追跡フィルタ部を示す図面である。
【図3】本発明の望ましい一実施例によるレーダ追跡方法のフローチャートである。
【図4】本発明の他の望ましい一実施例によるレーダ追跡方法のフローチャートである。
【図5】本発明の望ましい一実施例によるレーダ測定誤差特性の変化による追跡指数の変化を示すグラフである。
【図6】本発明の望ましい一実施例による更新されたα利得パラメータを示すグラフである。
【図7】本発明の望ましい一実施例による更新されたβ利得パラメータを示すグラフである。
【図8】本発明の望ましい一実施例による更新されたα−β利得を利用した追跡フィルタの位置推定誤差を示すグラフである。
【図9】本発明の望ましい一実施例による更新されたα−β利得を利用した追跡フィルタの速度推定誤差を示すグラフである。
【発明を実施するための形態】
【0012】
以下、添付した図面を使用しつつ、本発明によるレーダ追跡装置及びその方法について詳細に説明する。
【0013】
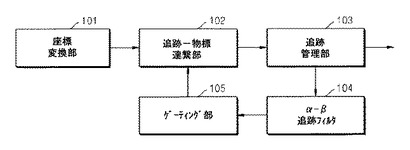
図1は、本発明の望ましい一実施例によるレーダ追跡装置である。図1を参照すれば、本発明によるレーダ追跡装置は、座標変換部101、追跡−物標連繋部102、追跡管理部103、α−β追跡フィルタ104及びゲーティング部105を備える。
【0014】
座標変換部101は、極座標系で観測された物標の位置を、直交座標系での位置に変換する。レーダ観測値は極座標系で得られるので、追跡フィルタで使用する座標系と同じ座標系(直交座標系)への変換が必要である。
【0015】
追跡−物標連繋部102は、探知された物標の位置と予測された標的の位置とを利用し、距離誤差の自乗が最小になる標的と物標とを連繋する。物標は、レーダスキャン映像から抽出された「object」である。一般的に物標という用語は、軍隊で使用する表現であり、軍隊で物標は、レーダによって探知された未確認物体を意味する。
【0016】
標的は、物標のうちで追跡しなければならない価値のある関心物標をいう。主に、任務遂行中である味方の船舶、飛行機や操業中である船舶または威嚇要因になると推定される物標が標的である。
【0017】
標的を追跡して標的の現在位置及び航速方向が分かる。これを介して味方の円滑な任務遂行のための誘導(guidance)、操業中である船舶の場合には、軍事境界線侵犯、操業区域離脱または離脱可能性などに対して判断できる。
【0018】
すなわち、船舶などの誘導を行うことができ、多数の船舶が密集した区域では、衝突回避などのための自動衝突予防補助装置(ARPA:Automatic Radar Plotting Aids)機能に追跡情報を使用する。
【0019】
追跡管理部103は、新たに探知された物標に対する追跡の生成を行い、物標と関連しない追跡に対して追跡の維持及び削除を管理する。
【0020】
α−β追跡フィルタ104は、物標と関連した追跡に対して、物標を測定値として追跡の更新及び予測を行う。α−β追跡フィルタ104は、既追跡物標の予測位置提供のために追跡予測を行う。
【0021】
ゲーティング部105は、予測された標的の位置とレーダによって観測された物標との連繋のための境界を設定する。
【0022】
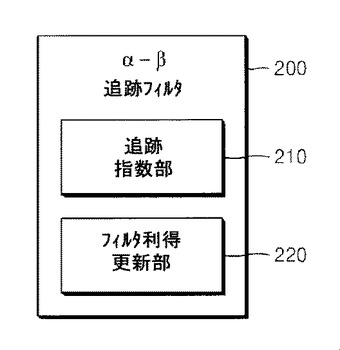
図2は、本発明の望ましい一実施例によるレーダ追跡装置で使用する追跡フィルタ部である。図2を参照すれば、本発明のレーダ追跡装置で使用するα−β追跡フィルタ200は、追跡指数部210及びフィルタ利得更新部220を備える。
【0023】
追跡指数部210は、追跡の測定値を極座標系から直交座標系に変換することによって発生するレーダ測定値の測定誤差共分散の変化を基に、α−β追跡フィルタのα及びβフィルタ利得を求めるための追跡指数を計算する。
【0024】
追跡指数部210でのレーダ測定値の測定誤差共分散の変化は、レーダ測定誤差の標準偏差の関数を基に示す。これについて詳細に説明すれば、次の通りである。
【0025】
α−β追跡フィルタは、レーダによって観測された物標の位置情報から測定誤差共分散を計算する。
【0026】
まず、最適α−β追跡フィルタの運動及び観測モデルは、次の通りである。離散時間で位置と速度とを状態変数とする標的の運動モデルは、次の通り示すことができる。
【0027】
【数1】
【0028】
【0029】
T秒の間隔で観測される標的の位置に係る測定方程式は、次の通り示すことができる。
【0030】
【数2】
【0031】
【0032】
α−β追跡フィルタの予測式(式3)と改善式(式4)は、次の通り示すことができる。
【0033】
【数3】
【0034】
【数4】
【0035】
【0036】
【数5】
【0037】
最適のα−β利得は、追跡指数から次の通り求めることができる。
【0038】
【数6】
【0039】
【数7】
【0040】
従って、α−β追跡フィルタの利得行列は、次の通り示すことができる。
【0041】
【数8】
【0042】
また、変換された測定値を利用する直交座標系で設計された分離型追跡フィルタの利得行列は、距離と方位とを分けて次の通り示すことができる。
【0043】
【数9】
【0044】
ここで、DとD2は、(式10)及び(式11)の通りである。
【0045】
【数10】
【0046】
【数11】
【0047】
【0048】
MUCM(Modified Unbiased Converted Measurements)を利用して直交座標系に変換されたレーダ測定値に対する測定誤差の共分散行列は、次の通り示すことができる。
【0049】
【数12】
【0050】
ここで、
【0051】
【数13】
【0052】
【数14】
【0053】
【数15】
【0054】
【数16】
【0055】
【数17】
【0056】
【0057】
(式12)と(式13)とから分かるように、x,y軸に対する測定誤差共分散は、標的の距離によって変わるので、あらかじめ計算された追跡指数及びα−β利得が不適切になって追跡性能が低下しうる。従って、これを考慮して、追跡フィルタの利得を更新せねばならない。
【0058】
これまで、MUCMを利用して直交座標系に変換されたレーダ測定値に対する測定誤差の共分散行列を示した。
【0059】
しかし、変換方法をMUCMのみに制限する必要はなく、MUCMだけではなく、古典的な変換(Classical Conversion)、Debiased Conversion、不偏変換(Unbiased Conversion)を含むいなかる方法で変換しても、直交座標系に変換した測定値の測定誤差共分散は、変わるようになる。
【0060】
次に、追跡指数の変化量を計算する。近似的α−β利得更新のために、追跡指数の変化量を計算する。
【0061】
まず、x,y軸に対する測定誤差共分散の変化を考慮し、(式5)を次の通り示すことができる。
【0062】
【数18】
【0063】
【0064】
フィルタ利得更新部220は、追跡指数変化率に対するα及びβフィルタ利得の変化率の偏微分係数と追跡指数変化量とを基に、α及びβフィルタ利得の変化量を計算し、α及びβフィルタ利得を更新する。
【0065】
追跡指数での偏微分係数を利用し、δα,δβを計算する。追跡指数の変化率によるα−β利得の変化率は、次の通り示すことができる。
【0066】
【数19】
【0067】
【数20】
【0068】
追跡指数に対するα−β利得の偏微分方程式は、(式6)と(式7)とから、次の通り誘導できる。
【0069】
【数21】
【0070】
【数22】
【0071】
k番目スキャンとk+1番目スキャンとの間の追跡指数と、α−β利得の変化量は、次の通り示すことができる。
【0072】
【数23】
【0073】
【数24】
【0074】
【数25】
【0075】
(式19)ないし(式25)から、α−β利得の変化量は、次の通り与えられる。
【0076】
【数26】
【0077】
【数27】
【0078】
従って、k+1番目の更新周期で、公称点に対する追跡指数の変化量と、α−β利得の変化量とを利用した更新されたα−β利得は、次の通り示すことができる。
【0079】
【数28】
【0080】
【数29】
【0081】
【数30】
【0082】
また、α−β追跡フィルタの利得行列は、次の通り与えられる。
【0083】
【数31】
【0084】
(式18)ないし(式31)まで追跡フィルタの利得を計算する過程は、追跡指数に対するα−β利得の偏微分が定数であると仮定すれば、非常に簡略に整理でき、(式26)と(式27)は、次の通り示すことができる。
【0085】
【数32】
【0086】
【数33】
【0087】
【0088】
【数34】
【0089】
【数35】
【0090】
【0091】
計算されたα−β利得の変化量を利用し、α−β利得を更新する。計算されたα−β利得の変化量を利用し、次の通りα−β利得を更新する。また、更新されたα−β利得を利用し、追跡を更新する。
【0092】
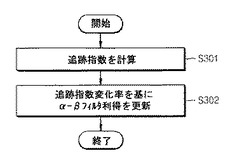
図3は、本発明の望ましい一実施例によるレーダ追跡方法のフローチャートである。図3を参照すれば、α−β追跡フィルタを利用するレーダ追跡方法は、追跡指数の計算段階(S301)及びフィルタ利得の更新段階(S302)を含む。
【0093】
追跡指数の計算段階(S301)は、追跡の測定値を極座標系から直交座標系に変換することによって発生するレーダ測定値の測定誤差共分散の変化を基に、α−β追跡フィルタのα及びβフィルタ利得を求めるための追跡指数を計算する。
【0094】
追跡指数の計算段階(S301)で、レーダ測定値の測定誤差共分散の変化は、レーダ測定誤差の標準偏差の関数を基に示すことができる。
【0095】
フィルタ利得の更新段階(S302)は、追跡指数変化率に対するα及びβフィルタ利得の変化率の偏微分係数と追跡指数変化量とを基に、α及びβフィルタ利得の変化量を計算し、α及びβフィルタ利得を更新する。
【0096】
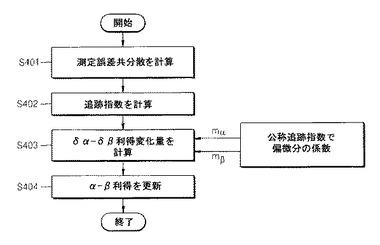
図4は、本発明の他の望ましい一実施例によるレーダ追跡方法で、測定値誤差特性の変化を考慮した追跡フィルタの利得更新方法に係る説明である。
【0097】
α−β追跡フィルタは、レーダによって観測された物標の位置情報から測定誤差共分散を計算する。
【0098】
まず、最適α−β追跡フィルタの運動及び観測モデルは、次の通りである。離散時間で、位置と速度とを状態変数とする標的の運動モデルは、次の通り示すことができる。
【0099】
【数36】
【0100】
【0101】
T秒の間隔で観測される標的の位置に係る測定方程式は、次の通り示すことができる。
【0102】
【数37】
【0103】
【0104】
α−β追跡フィルタの予測式(式3)と改善式(式4)は、次の通り示すことができる。
【0105】
【数38】
【0106】
【数39】
【0107】
【0108】
【数40】
【0109】
最適のα−β利得は、追跡指数から次の通り求めることができる。
【0110】
【数41】
【0111】
【数42】
【0112】
従って、α−β追跡フィルタの利得行列は、次の通り示すことができる。
【0113】
【数43】
【0114】
また、変換された測定値を利用する直交座標系で設計された分離型追跡フィルタの利得行列は、距離と方位とを分けて次の通り示すことができる。
【0115】
【数44】
【0116】
ここで、DとD2は、(式10)及び(式11)の通りである。
【0117】
【数45】
【0118】
【数46】
【0119】
である。
【0120】
【0121】
MUCMを利用し、直交座標系に変換されたレーダ測定値に対する測定誤差の共分散行列は、次の通り示すことができる。
【0122】
【数47】
【0123】
ここで、
【0124】
【数48】
【0125】
【数49】
【0126】
【数50】
【0127】
【数51】
【0128】
【数52】
【0129】
【0130】
(式12)と(式13)とから分かるように、x,y軸に対する測定誤差共分散は、標的の距離によって変わるので、あらかじめ計算された追跡指数及びα−β利得が不適切になって追跡性能が低下しうる。従って、これを考慮して、追跡フィルタの利得を更新せねばならない。
【0131】
これまで、MUCMを利用して直交座標系に変換されたレーダ測定値に対する測定誤差の共分散行列を示した。しかし、変換方法をMUCMだけに制限する必要はなく、MUCMだけではなく、古典的な変換、Debiased Conversion)、不偏変換を含むいかなる方法で変換しても、直交座標系に変換した測定値の測定誤差共分散は変わるようになる。
【0132】
次に、追跡指数の変化量を計算する(S402)。近似的α−β利得更新のために、追跡指数の変化量を計算する。
【0133】
まず、x,y軸に対する測定誤差共分散の変化を考慮し、(式5)を次の通り示すことができる。
【0134】
【数53】
【0135】
【0136】
追跡指数での偏微分係数を利用し、δα,δβを計算する(S403)。追跡指数の変化率によるα−β利得の変化率は、次の通り示すことができる。
【0137】
【数54】
【0138】
【数55】
【0139】
追跡指数に対するα−β利得の偏微分方程式は、(式6)と(式7)とから、次の通り誘導できる。
【0140】
【数56】
【0141】
【数57】
【0142】
k番目スキャンとk+1番目スキャンとの間の追跡指数と、α−β利得の変化量は、次の通り示すことができる。
【0143】
【数58】
【0144】
【数59】
【0145】
【数60】
【0146】
(式19)ないし(式25)から、α−β利得の変化量は、次の通り与えられる。
【0147】
【数61】
【0148】
【数62】
【0149】
従って、k+1番目の更新周期で、公称点に対する追跡指数の変化量と、α−β利得の変化量とを利用した更新されたα−β利得は、次の通り示すことができる。
【0150】
【数63】
【0151】
【数64】
【0152】
【数65】
【0153】
また、α−β追跡フィルタの利得行列は、次の通り与えられる。
【0154】
【数66】
【0155】
(式18)ないし(式31)まで追跡フィルタの利得を計算する過程は、追跡指数に対するα−β利得の偏微分が定数であると仮定すれば、非常に簡略に整理でき、(式26)と(式27)は、次の通り示すことができる。
【0156】
【数67】
【0157】
【数68】
【0158】
【0159】
【数69】
【0160】
【数70】
【0161】
【0162】
計算されたα−β利得の変化量を利用し、α−β利得を更新する(S404)。計算されたα−β利得の変化量を利用し、次の通りα−β利得を更新する。また、更新されたα−β利得を利用して追跡を更新する。
【0163】
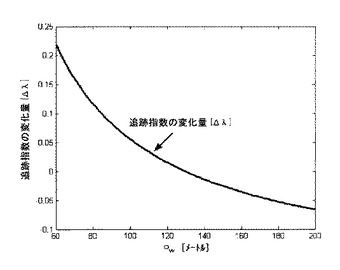
図5は、本発明の望ましい一実施例によるレーダ測定誤差特性の変化による追跡指数の変化を示す。すなわち、図5は、観測誤差共分散の変化に対する追跡指数の変化量を示したものである。
【0164】
標的の運動モデルは、等速運動モデルを利用し、工程誤差の標準偏差は、0.98m/s2に設定した。レーダ観測値は、距離と方位とに対してそれぞれ50mと1°との標準偏差を有する平均が0である白色ノイズと仮定して生成した。また、更新周期は5秒、すなわち、アンテナの回転率を12rpm(revolution per minute)に設定した。
【0165】
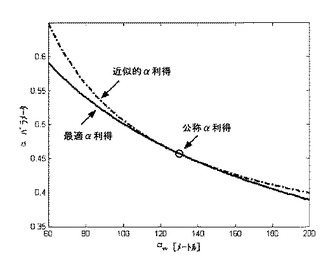
図6は、本発明の望ましい一実施例による更新されたα利得パラメータを示す。図6を参照すれば、既存方法による公称α利得パラメータと、本発明の一実施例による更新されたα利得パラメータ及び最適α利得パラメータとを示している。
【0166】
図6は、最適追跡指数を利用して計算したα利得と、近似法を利用して計算された追跡指数を利用したα利得とを示したものであり、後者は、本発明によるα−β追跡フィルタに使われる。
【0167】
円は、公称点での最適α利得を意味する。標的の運動モデルは等速運動モデルを利用し、工程誤差の標準偏差は、0.98に設定した。レーダ観測値は、距離と方位とに対してそれぞれ50mと1°との標準偏差を有する平均が0である白色ノイズと仮定して生成した。また、更新周期は5秒、すなわち、アンテナの回転率を12rpmに設定した。
【0168】
【0169】
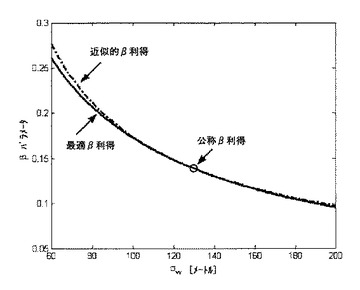
図7は、本発明の望ましい一実施例による更新されたβ利得パラメータを示す。図7を参照すれば、既存方法による公称β利得パラメータと、本発明の一実施例による更新されたβ利得パラメータ及び最適β利得パラメータとを示している。
【0170】
図7は、最適追跡指数を利用して計算したβ利得と、近似法を利用して計算された追跡指数を利用したβ利得とを示したものであり、後者は、本発明によるα−β追跡フィルタに使われる。
【0171】
円は、公称点での最適β利得を意味する。標的の運動モデルは等速運動モデルを利用し、工程誤差の標準偏差は、0.98に設定した。レーダ観測値は、距離と方位とに対してそれぞれ50mと1°との標準偏差を有する平均が0である白色ノイズと仮定して生成した。また、更新周期は5秒、すなわち、アンテナの回転率を12rpmに設定した。
【0172】
【0173】
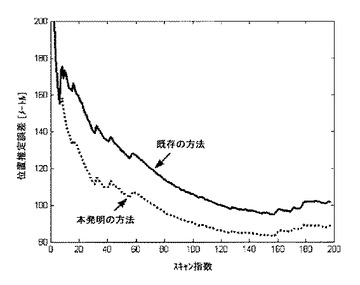
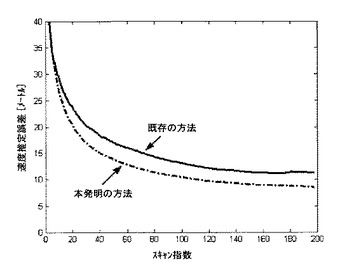
図8は、本発明の望ましい一実施例による更新されたα−β利得を利用した追跡フィルタの位置推定誤差を示す。図8を参照し、既存方法と本発明とによる更新されたα−β利得を利用した追跡フィルタの位置推定誤差に対するRMS値の比較する。
【0174】
図8は、位置と速度との推定値に対するRMS(Root Mean Square)誤差を示したものであり、実線は、一般的なα−β追跡フィルタの位置推定誤差に対するRMS値であり、点線は、提案した方式によるα−β追跡フィルタの位置推定誤差に対するRMS値である。
【0175】
本発明によるα−β追跡フィルタが、一般的なα−β追跡フィルタに比べて大きく改善された位置追跡性能を提供することが分かる。
【0176】
点線は、本発明によるα−β利得更新を利用したα−β追跡フィルタを利用した標的の位置推定誤差をRMS値で示したものであり、実線は、既存方法である公称点でのα−β利得を利用して追跡した場合の標的の位置推定誤差RMS値で示したものである。
【0177】
図9は、本発明の望ましい一実施例による更新されたα−β利得を利用した追跡フィルタの速度推定誤差を示す。図9を参照し、既存方法と本発明とによる更新されたα−β利得を利用した追跡フィルタの速度推定誤差に対するRMS値を比較する。
【0178】
図9は、位置と速度との推定値に対するRMS誤差を示したものであり、実線は、一般的なα−β追跡フィルタの位置推定誤差に対するRMS値であり、点線は、提案した方式によるα−β追跡フィルタの位置推定誤差に対するRMS値である。
【0179】
点線は、本発明によるα−β利得更新を利用したα−β追跡フィルタを利用した標的の位置推定誤差をRMS値で示したものであり、実線は、既存方法である公称点でのα−β利得を利用して追跡した場合の標的の位置推定誤差RMS値で示したものである。
【0180】
本発明によるレーダ観測誤差特性変化を考慮したα−β追跡フィルタが、一般的なα−β追跡フィルタに比べて大きく改善された位置追跡性能を提供することが分かる。
【0181】
本発明はまた、コンピュータで読み取り可能な記録媒体にコンピュータで読み取り可能なコードでもって具現することが可能である。コンピュータで読み取り可能な記録媒体は、コンピュータシステムによって読み取り可能なデータが保存されるあらゆる種類の記録装置を含む。
【0182】
コンピュータで読み取り可能な記録媒体の例としては、ROM(Read-Only Memory)、RAM(Random-Access Memory)、CD−ROM、磁気テープ、フロッピーディスク、光データ保存装置などがあり、またキャリアウェーブ(例えば、インターネットを介した伝送)の形態で具現されるものも含む。また、コンピュータで読み取り可能な記録媒体は、ネットワークに連結されたコンピュータシステムに分散され、分散方式でコンピュータで読み取り可能なコードが保存されて実行されうる。
【0183】
以上、本発明についてその望ましい実施例を中心に説明した。本発明が属する技術分野で当業者は、本発明が本発明の本質的な特性から外れない範囲で変形された形態で具現しうることを理解することができるであろう。従って、開示された実施例は、限定的な観点ではなく、説明的な観点から考慮されねばならない。本発明の範囲は、前述の説明ではなくして特許請求の範囲に示されており、それと同等な範囲内にあるあらゆる差異点は、本発明に含まれるものと解釈されるものである。
【産業上の利用可能性】
【0184】
本発明は、レーダ測定値を利用して物標に対する追跡を行う場合、レーダ測定値の誤差特性変化を考慮して追跡フィルタの利得を更新することによって、さらに向上した追跡性能を提供する。
【技術分野】
【0001】
本発明は、レーダ追跡装置及びその方法に係り、さらに詳細には、測定値の誤差特性変化を考慮してα−β利得を更新するレーダ追跡装置及びその方法に関する。
【0002】
すなわち本発明は、直交座標系に変換されたレーダ測定値から測定誤差共分散を計算し、これを利用して追跡指数の変化量、α−β利得変化量計算及びα−β利得を更新するレーダ追跡装置及びその方法に関する。
【背景技術】
【0003】
レーダを利用した追跡装置は、軍事用目的だけではなく、港湾及び大型船舶などで主に使われてきた。しかし、最近には、車両の衝突防止分野にまでその利用分野が拡大されている。
【0004】
レーダ追跡装置には、α−βフィルタ、カルマン(Kalman)フィルタなどが使われており、特に、数十〜数百の標的を同時に追跡しなければならないTWS(Track−While−Scan)追跡装置では、α−βフィルタが広範囲に使われている。
【0005】
α−βフィルタは、他の追跡方法に比べて演算量が非常に少ないために、リアルタイムで多数の標的を追跡せねばならないTWS追跡装置に適するためである。しかし、直交座標系に変換されたレーダ測定値は、標的の距離及び方位によって測定誤差の特性が変わるので、これを考慮したα−β利得の更新が必要である。
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明がなそうとする技術的課題は、レーダ測定値を利用して物標に対する追跡を行う場合、レーダ測定値の誤差特性変化を考慮して追跡フィルタの利得を更新することによって、さらに向上した追跡性能を提供するところにある。
【課題を解決するための手段】
【0007】
前記技術的課題をなすための本発明によるレーダ追跡装置の一実施例は、追跡の測定値を極座標系から直交座標系に変換することによって発生するレーダ測定値の測定誤差共分散の変化を基に、α−β追跡フィルタのα及びβフィルタ利得を求めるための追跡指数を計算する追跡指数部、及び追跡指数変化率に対するα及びβフィルタ利得の変化率の偏微分係数と追跡指数変化量とを基にα及びβフィルタ利得の変化量を計算し、α及びβフィルタ利得を更新するフィルタ利得更新部を具備するα−β追跡フィルタを有する。
【0008】
前記技術的課題をなすための本発明によるレーダ追跡装置の一実施例は、追跡の測定値を極座標系から直交座標系に変換することによって発生するレーダ測定値の測定誤差共分散の変化を基に、α−β追跡フィルタのα及びβフィルタ利得を求めるための追跡指数を計算する追跡指数の計算段階、及び追跡指数変化率に対するα及びβフィルタ利得の変化率の偏微分係数と追跡指数変化量とを基にα及びβフィルタ利得の変化量を計算し、α及びβフィルタ利得を更新するフィルタ利得の更新段階を有する。
【発明の効果】
【0009】
本発明は、レーダ測定値を利用した追跡装置において、測定誤差の特性変化によって追跡フィルタの利得を更新することによって、向上した追跡性能を提供する。
【0010】
このように本発明は、軍事用レーダ;港湾などの船舶の航路誘導及び統制のためのレーダ;航空機、船舶及び車両などの衝突防止のためのレーダのような多様な目的のレーダに使われうる。
【図面の簡単な説明】
【0011】
【図1】本発明の望ましい一実施例によるレーダ追跡装置を示す図面である。
【図2】本発明の望ましい一実施例によるレーダ追跡装置で使用する追跡フィルタ部を示す図面である。
【図3】本発明の望ましい一実施例によるレーダ追跡方法のフローチャートである。
【図4】本発明の他の望ましい一実施例によるレーダ追跡方法のフローチャートである。
【図5】本発明の望ましい一実施例によるレーダ測定誤差特性の変化による追跡指数の変化を示すグラフである。
【図6】本発明の望ましい一実施例による更新されたα利得パラメータを示すグラフである。
【図7】本発明の望ましい一実施例による更新されたβ利得パラメータを示すグラフである。
【図8】本発明の望ましい一実施例による更新されたα−β利得を利用した追跡フィルタの位置推定誤差を示すグラフである。
【図9】本発明の望ましい一実施例による更新されたα−β利得を利用した追跡フィルタの速度推定誤差を示すグラフである。
【発明を実施するための形態】
【0012】
以下、添付した図面を使用しつつ、本発明によるレーダ追跡装置及びその方法について詳細に説明する。
【0013】
図1は、本発明の望ましい一実施例によるレーダ追跡装置である。図1を参照すれば、本発明によるレーダ追跡装置は、座標変換部101、追跡−物標連繋部102、追跡管理部103、α−β追跡フィルタ104及びゲーティング部105を備える。
【0014】
座標変換部101は、極座標系で観測された物標の位置を、直交座標系での位置に変換する。レーダ観測値は極座標系で得られるので、追跡フィルタで使用する座標系と同じ座標系(直交座標系)への変換が必要である。
【0015】
追跡−物標連繋部102は、探知された物標の位置と予測された標的の位置とを利用し、距離誤差の自乗が最小になる標的と物標とを連繋する。物標は、レーダスキャン映像から抽出された「object」である。一般的に物標という用語は、軍隊で使用する表現であり、軍隊で物標は、レーダによって探知された未確認物体を意味する。
【0016】
標的は、物標のうちで追跡しなければならない価値のある関心物標をいう。主に、任務遂行中である味方の船舶、飛行機や操業中である船舶または威嚇要因になると推定される物標が標的である。
【0017】
標的を追跡して標的の現在位置及び航速方向が分かる。これを介して味方の円滑な任務遂行のための誘導(guidance)、操業中である船舶の場合には、軍事境界線侵犯、操業区域離脱または離脱可能性などに対して判断できる。
【0018】
すなわち、船舶などの誘導を行うことができ、多数の船舶が密集した区域では、衝突回避などのための自動衝突予防補助装置(ARPA:Automatic Radar Plotting Aids)機能に追跡情報を使用する。
【0019】
追跡管理部103は、新たに探知された物標に対する追跡の生成を行い、物標と関連しない追跡に対して追跡の維持及び削除を管理する。
【0020】
α−β追跡フィルタ104は、物標と関連した追跡に対して、物標を測定値として追跡の更新及び予測を行う。α−β追跡フィルタ104は、既追跡物標の予測位置提供のために追跡予測を行う。
【0021】
ゲーティング部105は、予測された標的の位置とレーダによって観測された物標との連繋のための境界を設定する。
【0022】
図2は、本発明の望ましい一実施例によるレーダ追跡装置で使用する追跡フィルタ部である。図2を参照すれば、本発明のレーダ追跡装置で使用するα−β追跡フィルタ200は、追跡指数部210及びフィルタ利得更新部220を備える。
【0023】
追跡指数部210は、追跡の測定値を極座標系から直交座標系に変換することによって発生するレーダ測定値の測定誤差共分散の変化を基に、α−β追跡フィルタのα及びβフィルタ利得を求めるための追跡指数を計算する。
【0024】
追跡指数部210でのレーダ測定値の測定誤差共分散の変化は、レーダ測定誤差の標準偏差の関数を基に示す。これについて詳細に説明すれば、次の通りである。
【0025】
α−β追跡フィルタは、レーダによって観測された物標の位置情報から測定誤差共分散を計算する。
【0026】
まず、最適α−β追跡フィルタの運動及び観測モデルは、次の通りである。離散時間で位置と速度とを状態変数とする標的の運動モデルは、次の通り示すことができる。
【0027】
【数1】
【0028】
【0029】
T秒の間隔で観測される標的の位置に係る測定方程式は、次の通り示すことができる。
【0030】
【数2】
【0031】
【0032】
α−β追跡フィルタの予測式(式3)と改善式(式4)は、次の通り示すことができる。
【0033】
【数3】
【0034】
【数4】
【0035】
【0036】
【数5】
【0037】
最適のα−β利得は、追跡指数から次の通り求めることができる。
【0038】
【数6】
【0039】
【数7】
【0040】
従って、α−β追跡フィルタの利得行列は、次の通り示すことができる。
【0041】
【数8】
【0042】
また、変換された測定値を利用する直交座標系で設計された分離型追跡フィルタの利得行列は、距離と方位とを分けて次の通り示すことができる。
【0043】
【数9】
【0044】
ここで、DとD2は、(式10)及び(式11)の通りである。
【0045】
【数10】
【0046】
【数11】
【0047】
【0048】
MUCM(Modified Unbiased Converted Measurements)を利用して直交座標系に変換されたレーダ測定値に対する測定誤差の共分散行列は、次の通り示すことができる。
【0049】
【数12】
【0050】
ここで、
【0051】
【数13】
【0052】
【数14】
【0053】
【数15】
【0054】
【数16】
【0055】
【数17】
【0056】
【0057】
(式12)と(式13)とから分かるように、x,y軸に対する測定誤差共分散は、標的の距離によって変わるので、あらかじめ計算された追跡指数及びα−β利得が不適切になって追跡性能が低下しうる。従って、これを考慮して、追跡フィルタの利得を更新せねばならない。
【0058】
これまで、MUCMを利用して直交座標系に変換されたレーダ測定値に対する測定誤差の共分散行列を示した。
【0059】
しかし、変換方法をMUCMのみに制限する必要はなく、MUCMだけではなく、古典的な変換(Classical Conversion)、Debiased Conversion、不偏変換(Unbiased Conversion)を含むいなかる方法で変換しても、直交座標系に変換した測定値の測定誤差共分散は、変わるようになる。
【0060】
次に、追跡指数の変化量を計算する。近似的α−β利得更新のために、追跡指数の変化量を計算する。
【0061】
まず、x,y軸に対する測定誤差共分散の変化を考慮し、(式5)を次の通り示すことができる。
【0062】
【数18】
【0063】
【0064】
フィルタ利得更新部220は、追跡指数変化率に対するα及びβフィルタ利得の変化率の偏微分係数と追跡指数変化量とを基に、α及びβフィルタ利得の変化量を計算し、α及びβフィルタ利得を更新する。
【0065】
追跡指数での偏微分係数を利用し、δα,δβを計算する。追跡指数の変化率によるα−β利得の変化率は、次の通り示すことができる。
【0066】
【数19】
【0067】
【数20】
【0068】
追跡指数に対するα−β利得の偏微分方程式は、(式6)と(式7)とから、次の通り誘導できる。
【0069】
【数21】
【0070】
【数22】
【0071】
k番目スキャンとk+1番目スキャンとの間の追跡指数と、α−β利得の変化量は、次の通り示すことができる。
【0072】
【数23】
【0073】
【数24】
【0074】
【数25】
【0075】
(式19)ないし(式25)から、α−β利得の変化量は、次の通り与えられる。
【0076】
【数26】
【0077】
【数27】
【0078】
従って、k+1番目の更新周期で、公称点に対する追跡指数の変化量と、α−β利得の変化量とを利用した更新されたα−β利得は、次の通り示すことができる。
【0079】
【数28】
【0080】
【数29】
【0081】
【数30】
【0082】
また、α−β追跡フィルタの利得行列は、次の通り与えられる。
【0083】
【数31】
【0084】
(式18)ないし(式31)まで追跡フィルタの利得を計算する過程は、追跡指数に対するα−β利得の偏微分が定数であると仮定すれば、非常に簡略に整理でき、(式26)と(式27)は、次の通り示すことができる。
【0085】
【数32】
【0086】
【数33】
【0087】
【0088】
【数34】
【0089】
【数35】
【0090】
【0091】
計算されたα−β利得の変化量を利用し、α−β利得を更新する。計算されたα−β利得の変化量を利用し、次の通りα−β利得を更新する。また、更新されたα−β利得を利用し、追跡を更新する。
【0092】
図3は、本発明の望ましい一実施例によるレーダ追跡方法のフローチャートである。図3を参照すれば、α−β追跡フィルタを利用するレーダ追跡方法は、追跡指数の計算段階(S301)及びフィルタ利得の更新段階(S302)を含む。
【0093】
追跡指数の計算段階(S301)は、追跡の測定値を極座標系から直交座標系に変換することによって発生するレーダ測定値の測定誤差共分散の変化を基に、α−β追跡フィルタのα及びβフィルタ利得を求めるための追跡指数を計算する。
【0094】
追跡指数の計算段階(S301)で、レーダ測定値の測定誤差共分散の変化は、レーダ測定誤差の標準偏差の関数を基に示すことができる。
【0095】
フィルタ利得の更新段階(S302)は、追跡指数変化率に対するα及びβフィルタ利得の変化率の偏微分係数と追跡指数変化量とを基に、α及びβフィルタ利得の変化量を計算し、α及びβフィルタ利得を更新する。
【0096】
図4は、本発明の他の望ましい一実施例によるレーダ追跡方法で、測定値誤差特性の変化を考慮した追跡フィルタの利得更新方法に係る説明である。
【0097】
α−β追跡フィルタは、レーダによって観測された物標の位置情報から測定誤差共分散を計算する。
【0098】
まず、最適α−β追跡フィルタの運動及び観測モデルは、次の通りである。離散時間で、位置と速度とを状態変数とする標的の運動モデルは、次の通り示すことができる。
【0099】
【数36】
【0100】
【0101】
T秒の間隔で観測される標的の位置に係る測定方程式は、次の通り示すことができる。
【0102】
【数37】
【0103】
【0104】
α−β追跡フィルタの予測式(式3)と改善式(式4)は、次の通り示すことができる。
【0105】
【数38】
【0106】
【数39】
【0107】
【0108】
【数40】
【0109】
最適のα−β利得は、追跡指数から次の通り求めることができる。
【0110】
【数41】
【0111】
【数42】
【0112】
従って、α−β追跡フィルタの利得行列は、次の通り示すことができる。
【0113】
【数43】
【0114】
また、変換された測定値を利用する直交座標系で設計された分離型追跡フィルタの利得行列は、距離と方位とを分けて次の通り示すことができる。
【0115】
【数44】
【0116】
ここで、DとD2は、(式10)及び(式11)の通りである。
【0117】
【数45】
【0118】
【数46】
【0119】
である。
【0120】
【0121】
MUCMを利用し、直交座標系に変換されたレーダ測定値に対する測定誤差の共分散行列は、次の通り示すことができる。
【0122】
【数47】
【0123】
ここで、
【0124】
【数48】
【0125】
【数49】
【0126】
【数50】
【0127】
【数51】
【0128】
【数52】
【0129】
【0130】
(式12)と(式13)とから分かるように、x,y軸に対する測定誤差共分散は、標的の距離によって変わるので、あらかじめ計算された追跡指数及びα−β利得が不適切になって追跡性能が低下しうる。従って、これを考慮して、追跡フィルタの利得を更新せねばならない。
【0131】
これまで、MUCMを利用して直交座標系に変換されたレーダ測定値に対する測定誤差の共分散行列を示した。しかし、変換方法をMUCMだけに制限する必要はなく、MUCMだけではなく、古典的な変換、Debiased Conversion)、不偏変換を含むいかなる方法で変換しても、直交座標系に変換した測定値の測定誤差共分散は変わるようになる。
【0132】
次に、追跡指数の変化量を計算する(S402)。近似的α−β利得更新のために、追跡指数の変化量を計算する。
【0133】
まず、x,y軸に対する測定誤差共分散の変化を考慮し、(式5)を次の通り示すことができる。
【0134】
【数53】
【0135】
【0136】
追跡指数での偏微分係数を利用し、δα,δβを計算する(S403)。追跡指数の変化率によるα−β利得の変化率は、次の通り示すことができる。
【0137】
【数54】
【0138】
【数55】
【0139】
追跡指数に対するα−β利得の偏微分方程式は、(式6)と(式7)とから、次の通り誘導できる。
【0140】
【数56】
【0141】
【数57】
【0142】
k番目スキャンとk+1番目スキャンとの間の追跡指数と、α−β利得の変化量は、次の通り示すことができる。
【0143】
【数58】
【0144】
【数59】
【0145】
【数60】
【0146】
(式19)ないし(式25)から、α−β利得の変化量は、次の通り与えられる。
【0147】
【数61】
【0148】
【数62】
【0149】
従って、k+1番目の更新周期で、公称点に対する追跡指数の変化量と、α−β利得の変化量とを利用した更新されたα−β利得は、次の通り示すことができる。
【0150】
【数63】
【0151】
【数64】
【0152】
【数65】
【0153】
また、α−β追跡フィルタの利得行列は、次の通り与えられる。
【0154】
【数66】
【0155】
(式18)ないし(式31)まで追跡フィルタの利得を計算する過程は、追跡指数に対するα−β利得の偏微分が定数であると仮定すれば、非常に簡略に整理でき、(式26)と(式27)は、次の通り示すことができる。
【0156】
【数67】
【0157】
【数68】
【0158】
【0159】
【数69】
【0160】
【数70】
【0161】
【0162】
計算されたα−β利得の変化量を利用し、α−β利得を更新する(S404)。計算されたα−β利得の変化量を利用し、次の通りα−β利得を更新する。また、更新されたα−β利得を利用して追跡を更新する。
【0163】
図5は、本発明の望ましい一実施例によるレーダ測定誤差特性の変化による追跡指数の変化を示す。すなわち、図5は、観測誤差共分散の変化に対する追跡指数の変化量を示したものである。
【0164】
標的の運動モデルは、等速運動モデルを利用し、工程誤差の標準偏差は、0.98m/s2に設定した。レーダ観測値は、距離と方位とに対してそれぞれ50mと1°との標準偏差を有する平均が0である白色ノイズと仮定して生成した。また、更新周期は5秒、すなわち、アンテナの回転率を12rpm(revolution per minute)に設定した。
【0165】
図6は、本発明の望ましい一実施例による更新されたα利得パラメータを示す。図6を参照すれば、既存方法による公称α利得パラメータと、本発明の一実施例による更新されたα利得パラメータ及び最適α利得パラメータとを示している。
【0166】
図6は、最適追跡指数を利用して計算したα利得と、近似法を利用して計算された追跡指数を利用したα利得とを示したものであり、後者は、本発明によるα−β追跡フィルタに使われる。
【0167】
円は、公称点での最適α利得を意味する。標的の運動モデルは等速運動モデルを利用し、工程誤差の標準偏差は、0.98に設定した。レーダ観測値は、距離と方位とに対してそれぞれ50mと1°との標準偏差を有する平均が0である白色ノイズと仮定して生成した。また、更新周期は5秒、すなわち、アンテナの回転率を12rpmに設定した。
【0168】
【0169】
図7は、本発明の望ましい一実施例による更新されたβ利得パラメータを示す。図7を参照すれば、既存方法による公称β利得パラメータと、本発明の一実施例による更新されたβ利得パラメータ及び最適β利得パラメータとを示している。
【0170】
図7は、最適追跡指数を利用して計算したβ利得と、近似法を利用して計算された追跡指数を利用したβ利得とを示したものであり、後者は、本発明によるα−β追跡フィルタに使われる。
【0171】
円は、公称点での最適β利得を意味する。標的の運動モデルは等速運動モデルを利用し、工程誤差の標準偏差は、0.98に設定した。レーダ観測値は、距離と方位とに対してそれぞれ50mと1°との標準偏差を有する平均が0である白色ノイズと仮定して生成した。また、更新周期は5秒、すなわち、アンテナの回転率を12rpmに設定した。
【0172】
【0173】
図8は、本発明の望ましい一実施例による更新されたα−β利得を利用した追跡フィルタの位置推定誤差を示す。図8を参照し、既存方法と本発明とによる更新されたα−β利得を利用した追跡フィルタの位置推定誤差に対するRMS値の比較する。
【0174】
図8は、位置と速度との推定値に対するRMS(Root Mean Square)誤差を示したものであり、実線は、一般的なα−β追跡フィルタの位置推定誤差に対するRMS値であり、点線は、提案した方式によるα−β追跡フィルタの位置推定誤差に対するRMS値である。
【0175】
本発明によるα−β追跡フィルタが、一般的なα−β追跡フィルタに比べて大きく改善された位置追跡性能を提供することが分かる。
【0176】
点線は、本発明によるα−β利得更新を利用したα−β追跡フィルタを利用した標的の位置推定誤差をRMS値で示したものであり、実線は、既存方法である公称点でのα−β利得を利用して追跡した場合の標的の位置推定誤差RMS値で示したものである。
【0177】
図9は、本発明の望ましい一実施例による更新されたα−β利得を利用した追跡フィルタの速度推定誤差を示す。図9を参照し、既存方法と本発明とによる更新されたα−β利得を利用した追跡フィルタの速度推定誤差に対するRMS値を比較する。
【0178】
図9は、位置と速度との推定値に対するRMS誤差を示したものであり、実線は、一般的なα−β追跡フィルタの位置推定誤差に対するRMS値であり、点線は、提案した方式によるα−β追跡フィルタの位置推定誤差に対するRMS値である。
【0179】
点線は、本発明によるα−β利得更新を利用したα−β追跡フィルタを利用した標的の位置推定誤差をRMS値で示したものであり、実線は、既存方法である公称点でのα−β利得を利用して追跡した場合の標的の位置推定誤差RMS値で示したものである。
【0180】
本発明によるレーダ観測誤差特性変化を考慮したα−β追跡フィルタが、一般的なα−β追跡フィルタに比べて大きく改善された位置追跡性能を提供することが分かる。
【0181】
本発明はまた、コンピュータで読み取り可能な記録媒体にコンピュータで読み取り可能なコードでもって具現することが可能である。コンピュータで読み取り可能な記録媒体は、コンピュータシステムによって読み取り可能なデータが保存されるあらゆる種類の記録装置を含む。
【0182】
コンピュータで読み取り可能な記録媒体の例としては、ROM(Read-Only Memory)、RAM(Random-Access Memory)、CD−ROM、磁気テープ、フロッピーディスク、光データ保存装置などがあり、またキャリアウェーブ(例えば、インターネットを介した伝送)の形態で具現されるものも含む。また、コンピュータで読み取り可能な記録媒体は、ネットワークに連結されたコンピュータシステムに分散され、分散方式でコンピュータで読み取り可能なコードが保存されて実行されうる。
【0183】
以上、本発明についてその望ましい実施例を中心に説明した。本発明が属する技術分野で当業者は、本発明が本発明の本質的な特性から外れない範囲で変形された形態で具現しうることを理解することができるであろう。従って、開示された実施例は、限定的な観点ではなく、説明的な観点から考慮されねばならない。本発明の範囲は、前述の説明ではなくして特許請求の範囲に示されており、それと同等な範囲内にあるあらゆる差異点は、本発明に含まれるものと解釈されるものである。
【産業上の利用可能性】
【0184】
本発明は、レーダ測定値を利用して物標に対する追跡を行う場合、レーダ測定値の誤差特性変化を考慮して追跡フィルタの利得を更新することによって、さらに向上した追跡性能を提供する。
【特許請求の範囲】
【請求項1】
α−β追跡フィルタを有するレーダ追跡装置において、
前記α−β追跡フィルタは、
追跡の測定値を極座標系から直交座標系に変換することによって発生するレーダ測定値の測定誤差共分散の変化を基に、前記α−β追跡フィルタのα及びβフィルタ利得を求めるための追跡指数を計算する追跡指数部と、
前記追跡指数変化率に対する前記α及びβフィルタ利得の変化率の偏微分係数と前記追跡指数変化量とを基に、前記α及びβフィルタ利得の変化量を計算し、前記α及びβフィルタ利得を更新するフィルタ利得更新部と、
を具備することを特徴とするレーダ追跡装置。
【請求項2】
前記レーダ測定値の測定誤差共分散の変化は、レーダ測定誤差の標準偏差の関数を基に示されることを特徴とする請求項1に記載のレーダ追跡装置。
【請求項3】
前記追跡指数は、
レーダ測定誤差の標準偏差に対する前記追跡の運動モデルに係る工程誤差の標準偏差の比例値と、離散化間隔とに比例することを特徴とする請求項1に記載のレーダ追跡装置。
【請求項4】
【請求項5】
α−β追跡フィルタを利用するレーダ追跡方法において、
追跡の測定値を極座標系から直交座標系に変換することによって発生するレーダ測定値の測定誤差共分散の変化を基に、前記α−β追跡フィルタのα及びβフィルタ利得を求めるための追跡指数を計算する追跡指数の計算段階と、
前記追跡指数変化率に対する前記α及びβフィルタ利得の変化率の偏微分係数と前記追跡指数変化量とを基に、前記α及びβフィルタ利得の変化量を計算し、前記α及びβフィルタ利得を更新するフィルタ利得の更新段階と、
を含むことを特徴とするレーダ追跡方法。
【請求項6】
前記レーダ測定値の測定誤差共分散の変化は、レーダ測定誤差の標準偏差の関数を基に示されることを特徴とする請求項5に記載のレーダ追跡方法。
【請求項7】
請求項5または請求項6に記載の方法をコンピュータで実行させるためのプログラムを記録したコンピュータで読み取り可能な記録媒体。
【請求項1】
α−β追跡フィルタを有するレーダ追跡装置において、
前記α−β追跡フィルタは、
追跡の測定値を極座標系から直交座標系に変換することによって発生するレーダ測定値の測定誤差共分散の変化を基に、前記α−β追跡フィルタのα及びβフィルタ利得を求めるための追跡指数を計算する追跡指数部と、
前記追跡指数変化率に対する前記α及びβフィルタ利得の変化率の偏微分係数と前記追跡指数変化量とを基に、前記α及びβフィルタ利得の変化量を計算し、前記α及びβフィルタ利得を更新するフィルタ利得更新部と、
を具備することを特徴とするレーダ追跡装置。
【請求項2】
前記レーダ測定値の測定誤差共分散の変化は、レーダ測定誤差の標準偏差の関数を基に示されることを特徴とする請求項1に記載のレーダ追跡装置。
【請求項3】
前記追跡指数は、
レーダ測定誤差の標準偏差に対する前記追跡の運動モデルに係る工程誤差の標準偏差の比例値と、離散化間隔とに比例することを特徴とする請求項1に記載のレーダ追跡装置。
【請求項4】
【請求項5】
α−β追跡フィルタを利用するレーダ追跡方法において、
追跡の測定値を極座標系から直交座標系に変換することによって発生するレーダ測定値の測定誤差共分散の変化を基に、前記α−β追跡フィルタのα及びβフィルタ利得を求めるための追跡指数を計算する追跡指数の計算段階と、
前記追跡指数変化率に対する前記α及びβフィルタ利得の変化率の偏微分係数と前記追跡指数変化量とを基に、前記α及びβフィルタ利得の変化量を計算し、前記α及びβフィルタ利得を更新するフィルタ利得の更新段階と、
を含むことを特徴とするレーダ追跡方法。
【請求項6】
前記レーダ測定値の測定誤差共分散の変化は、レーダ測定誤差の標準偏差の関数を基に示されることを特徴とする請求項5に記載のレーダ追跡方法。
【請求項7】
請求項5または請求項6に記載の方法をコンピュータで実行させるためのプログラムを記録したコンピュータで読み取り可能な記録媒体。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公表番号】特表2010−505111(P2010−505111A)
【公表日】平成22年2月18日(2010.2.18)
【国際特許分類】
【出願番号】特願2009−530246(P2009−530246)
【出願日】平成19年6月15日(2007.6.15)
【国際出願番号】PCT/KR2007/002899
【国際公開番号】WO2008/038889
【国際公開日】平成20年4月3日(2008.4.3)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.フロッピー
【出願人】(596180076)韓國電子通信研究院 (733)
【氏名又は名称原語表記】Electronics and Telecommunications Research Institute
【住所又は居所原語表記】161 Kajong−dong, Yusong−gu, Taejon korea
【Fターム(参考)】
【公表日】平成22年2月18日(2010.2.18)
【国際特許分類】
【出願日】平成19年6月15日(2007.6.15)
【国際出願番号】PCT/KR2007/002899
【国際公開番号】WO2008/038889
【国際公開日】平成20年4月3日(2008.4.3)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.フロッピー
【出願人】(596180076)韓國電子通信研究院 (733)
【氏名又は名称原語表記】Electronics and Telecommunications Research Institute
【住所又は居所原語表記】161 Kajong−dong, Yusong−gu, Taejon korea
【Fターム(参考)】
[ Back to top ]