
レーダ通信装置
【課題】空中線が回転している他船の船舶と、データ通信可能なレーダ通信装置を提供する。
【解決手段】レーダ通信装置10は、レーダ波の送受信を行うレーダ送受信部16と、通信データの送受信を行う通信送受信部20とを備え、前記通信データを前記レーダ波に合成して送受信することにより空中線が回転する他船と通信するレーダ通信装置であって、前記通信データを受信し、受信した前記通信データを通信送受信部20に供給する通信用空中線44を有する。レーダ送受信部16は、前記通信データを前記レーダ波に合成して、前記レーダ波を送受信するレーダ用空中線30より送信し、通信用空中線44は、無指向性である。
【解決手段】レーダ通信装置10は、レーダ波の送受信を行うレーダ送受信部16と、通信データの送受信を行う通信送受信部20とを備え、前記通信データを前記レーダ波に合成して送受信することにより空中線が回転する他船と通信するレーダ通信装置であって、前記通信データを受信し、受信した前記通信データを通信送受信部20に供給する通信用空中線44を有する。レーダ送受信部16は、前記通信データを前記レーダ波に合成して、前記レーダ波を送受信するレーダ用空中線30より送信し、通信用空中線44は、無指向性である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、レーダ波の送受信を行うレーダ送受信部と、通信データの送受信を行う通信送受信部とを備え、前記通信データを前記レーダ波に合成して送受信することにより他船と通信するレーダ通信装置に関する。
【背景技術】
【0002】
従来、船舶同士が通信を行うためには、レーダ装置以外に通信装置が搭載されていた。船舶が商船の場合には、通信装置として、国際VHF無線装置やインマルサット衛星通信装置等が搭載され、船舶が小型漁船の場合には、通信装置として、SSB無線装置等が搭載されていた。従って、商船と小型漁船との通信装置は異なるために、両船舶間で通信することはできなかった。このような通信装置が異なる船舶同士の通信を実現すべく、船舶間の通信方法が研究されている。
【0003】
特許文献1には、レーダ波に通信データを合成させて、レーダ装置を利用して船舶同士の通信を行う通信装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−8069号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載の通信装置では、受信側の船舶は、空中線の回転を停止して、通信データを受信している。従って、受信側の船舶は、通信データを受信している間、空中線が停止しているために、レーダによる物標の探知をすることができない。また、特許文献1に記載の通信装置で用いられる空中線の水平ビーム幅は、1〜5度と非常に狭いために自船の空中線と他船の空中線とが正対しないと通信データを送受信することができないという不具合がある。
【0006】
本発明は、上記の課題を考慮してなされたものであって、空中線が回転している他船の船舶と通信可能なレーダ通信装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明に係るレーダ通信装置は、レーダ波の送受信を行うレーダ送受信部と、通信データの送受信を行う通信送受信部とを備え、前記通信データを送受信することにより他船と通信するレーダ通信装置であって、回転する前記他船の空中線から送信された前記通信データを受信し、受信した前記通信データを前記通信送受信部に供給する通信用空中線を有することを特徴とする。
【0008】
前記レーダ通信装置において、前記レーダ送受信部は、前記通信データを前記レーダ波に合成して、前記レーダ波を送受信するレーダ用空中線より送信し、前記通信用空中線は、無指向性であることを特徴とする。
【0009】
前記レーダ通信装置において、他船の方位を追尾する他船方位追尾部を有し、前記レーダ送受信部は、前記通信データを前記レーダ波に合成して、前記レーダ波を送受信するレーダ用空中線より送信し、前記通信送受信部は、前記他船方位追尾部で取得した前記他船の方位に指向性を有する前記通信用空中線を向けて、前記他船から前記通信データを受信することを特徴とする。
【0010】
前記レーダ通信装置において、他船の方位を追尾する他船方位追尾部を有し、前記通信用空中線は、前記レーダ波を送受信するレーダ用空中線よりも水平面内の指向性が広く、前記通信データを送受信可能であって、前記通信送受信部は、前記他船方位追尾部で取得した前記他船の方位に指向性を有する前記通信用空中線を向けて、前記他船と通信することを特徴とする。
【発明の効果】
【0011】
本発明のレーダ通信装置によれば、通信データの受信用として、無指向性の通信用空中線を有しているために、他船から送信された通信データを容易に受信することができる。また、通信データの受信用の通信用空中線が指向性空中線である場合には、通信データの受信時の混信を防ぐことができ、また、通信データの送受信用の通信用空中線が指向性空中線である場合には、通信データの送信時の送信電力を低減できる。さらに、送信側及び受信側の船舶は、空中線を停止せずにデータ通信時においても、レーダによる物標の探知をすることができる。
【図面の簡単な説明】
【0012】
【図1】本発明の第1実施形態に係るレーダ通信装置の説明図である。
【図2】本発明の第2実施形態に係るレーダ通信装置の説明図である。
【図3】本発明の第3実施形態に係るレーダ通信装置の説明図である。
【発明を実施するための形態】
【0013】
<第1実施形態の構成>
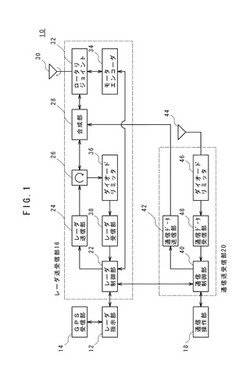
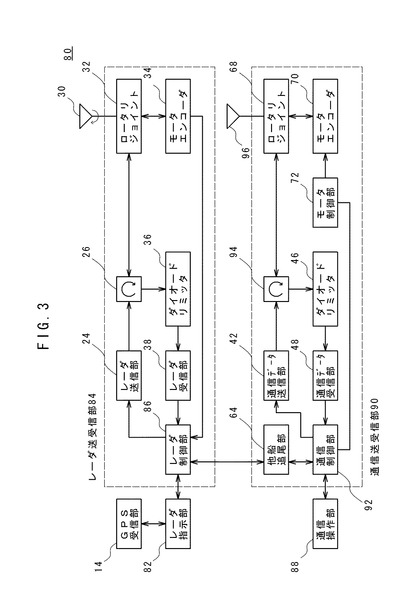
以下、本発明の実施形態について図面を参照して説明する。図1は、本発明の第1実施形態に係るレーダ通信装置10の説明図である。
【0014】
レーダ通信装置10は、レーダ指示部12と、GPS受信部14と、レーダ送受信部16と、通信操作部18と、通信送受信部20とを備える。
【0015】
レーダ指示部12は、レーダ波の送受信により他船等を探知するために操作する操作部であって、探知した他船等を表示する表示部(図示無し)を備える。GPS受信部14は、自船の位置情報を取得する受信部である。
【0016】
レーダ送受信部16は、レーダ波の送受信を制御するレーダ制御部22と、送信信号としてレーダ波を送信するレーダ送信部24と、3ポートサーキュレータであるサーキュレータ26と、レーダ波と通信データとを合成する合成部28と、水平ビーム幅が狭い指向性空中線であるレーダ用空中線30と、レーダ用空中線30を回転可能に支持するロータリジョイント32と、ロータリジョイント32を介してレーダ用空中線30を回転させるモータエンコーダ34と、ダイオードリミッタ36と、反射波を反射信号として受信するレーダ受信部38とを備える。レーダ用空中線30の水平ビーム幅としては、1〜5度程度であり、モータエンコーダ34は、自船の船首方向に対するレーダ用空中線30の相対方位をレーダ用空中線30の回転角度情報として検出するエンコーダ機能を有する。ダイオードリミッタ36は、レーダ波の送信時の送信電力からレーダ受信部38を保護するために設けられている。
【0017】
通信操作部18は、通信データを通信送受信部20において送受信するための操作をする操作部であって、通信データを表示する表示部(図示無し)を備える。
【0018】
通信送受信部20は、通信データの送受信を制御する通信制御部40と、通信データを送信する通信データ送信部42と、無指向性空中線である通信用空中線44と、ダイオードリミッタ46と、通信データを受信する通信データ受信部48とを備える。ダイオードリミッタ46は、ダイオードリミッタ36と同様にレーダ波の送信時の送信電力から通信データ受信部48を保護するために設けられている。
【0019】
<第1実施形態によるデータ通信の手順>
次に、レーダ通信装置10によるデータ通信の手順について、説明する。
【0020】
レーダ通信装置10では、まず、自船の周りの通信対象である他船の探知が行われる。通信操作部18から自船の周りの他船の探知をするための指示信号が通信制御部40を介してレーダ制御部22に供給される。レーダ制御部22は、レーダ用空中線30を回転させるための指示信号をモータエンコーダ34に供給し、ロータリジョイント32を介してモータエンコーダ34によってレーダ用空中線30が回転する。レーダ送信部24は、レーダ波として送信される送信信号を生成し、サーキュレータ26、合成部28、ロータリジョイント32を介して、送信信号がレーダ用空中線30に供給され、レーダ波としてレーダ用空中線30より放射される。また、この際、モータエンコーダ34は、自船の船首方向に対するレーダ用空中線30の相対方位を回転角度情報として検出し、前記回転角度情報に基づいて回転同期信号を生成し、レーダ制御部22に供給する。
【0021】
放射されたレーダ波は、他船を含む物標で反射され、反射波がレーダ用空中線30で受信される。受信された反射波は、ロータリジョイント32、合成部28、サーキュレータ26、ダイオードリミッタ36を介してレーダ受信部38に反射信号として供給される。レーダ受信部38は、反射信号を信号処理して映像表示信号に変換し、レーダ制御部22に供給する。レーダ制御部22は、前記回転同期信号及び映像表示信号をレーダ指示部12に供給し、他船を含めた物標の位置がレーダ指示部12の表示部に表示される。
【0022】
次に、自船から他船への通信データの送信が行われる。通信制御部40からレーダ制御部22への指示によりレーダ指示部12の表示部において通信対象となる他船が特定される。レーダ制御部22は、レーダ指示部12から特定した他船の方位情報として他船方位θtを取得し、モータエンコーダ34へ供給する。オペレータによって通信操作部18が操作され、他船に送信する通信データが用意され、通信制御部40に供給される。通信制御部40は、前記通信データを通信データ送信部42に供給し、通信データ送信部42によって通信データが合成部28に供給される。合成部28では、通信制御部40からレーダ制御部22への指示に従って、レーダ送信部24において、送信信号が生成され、サーキュレータ26を介して合成部28に供給される。合成部28において、供給された送信信号と、前記通信データを含む通信信号とが合成される。モータエンコーダ34において、他船方位θtに基づいて放射方向が調整され、合成された信号は、ロータリジョイント32を介してレーダ用空中線30よりレーダ波として他船方位θtの方向に放射される。
【0023】
他船の空中線が無指向性空中線の場合には、自船から放射されたレーダ波は、他船での自船の方位に依存することなく受信され、自船から他船への通信データの送信が完了する。また、他船の空中線が指向性空中線の場合には、水平ビーム幅が20度程度以上あれば、空中線が、大略、自船の方向に向いていれば、実用上問題なく、他船は、自船から通信データを受信することができる。
【0024】
また、他船を呼び出して通信する呼び出し通信をする際には、呼び出し用通信データとして、自船の識別符号及びGPS受信部14で取得した位置情報を所定時間、例えば1分間、他船に連続送信することにより行うことができる。他船に自船の識別符号及び位置情報を送信することにより、他船は、自船からの呼び出し通信に対して、応答することができる。他船の空中線の水平ビーム幅が20度程度の指向性の通信用空中線の場合に、他船の通信用空中線が1rpm程度にあれば、呼び出し用通信データを受信でき、その後、通信用空中線を受信信号の強度が最大の方位に維持して、他船は自船からの通信データを受信することができる。
【0025】
次に、自船における他船が送信した通信データの受信について説明する。他船より送信された通信データを含む通信信号は空中線44で受信され、ダイオードリミッタ46を介して、通信データ受信部48で受信され、増幅復調されて、通信制御部40を介して、通信操作部18に出力される。他船からの通信データは、通信操作部18の表示部に表示される。通信用空中線44は、無指向性空中線であるので、他船のレーダ波を放射する空中線が指向性空中線であっても、他船の空中線が自船方向に向けられていれば、通信データを受信することができる。
【0026】
レーダ通信装置10は、レーダ波の送受信を行うレーダ送受信部16と、通信データの送受信を行う通信送受信部20とを備え、前記通信データを送受信することにより他船と通信するレーダ通信装置であって、回転する前記他船の空中線から送信された前記通信データを受信し、受信した前記通信データを前記通信送受信部20に供給する通信用空中線を有する。レーダ送受信部16は、前記通信データを前記レーダ波に合成して、前記レーダ波を送受信するレーダ用空中線30より送信し、通信用空中線44は、受信用の無指向性空中線である。
【0027】
レーダ通信装置10によれば、通信データの受信用として、無指向性の通信用空中線を有しているために、他船から送信された通信データを容易に受信することができる。
【0028】
<第2実施形態の構成>
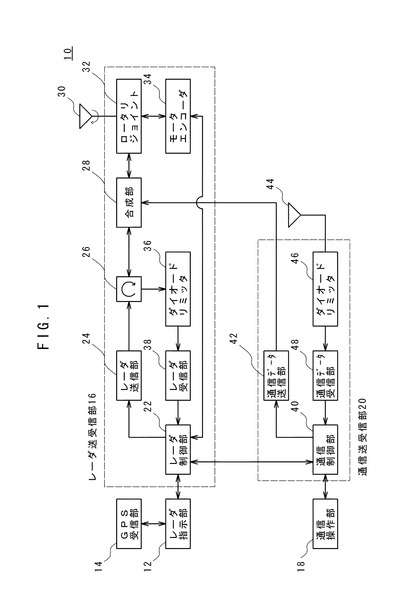
次に、本発明の第2実施形態について、図2を参照して説明する。図2は、本発明の第2実施形態に係るレーダ通信装置50の説明図である。なお、図1に示したレーダ通信装置10と同一の構成要素には同一の符号を付し、その詳細な説明を省略する。
【0029】
レーダ通信装置50は、レーダ指示部52と、GPS受信部14と、レーダ送受信部54と、通信操作部58と、通信送受信部60とを備える。
【0030】
レーダ指示部52は、レーダ指示部12と同様の指示部であって、さらに、後述する他船追尾部64により追尾する他船も表示しうる。レーダ送受信部54は、基本的な構成はレーダ送受信部16と同様であり、レーダ制御部22の代わりにレーダ制御部56を有する。
【0031】
通信操作部58は、通信データを通信送受信部60において送受信するための操作をする操作部であって、通信データを表示する表示部(図示無し)を備える。
【0032】
通信送受信部60は、通信データの送受信を制御する通信制御部62と、レーダ送受信部54で特定した他船の位置を追尾するための信号処理を行う他船追尾部64、通信データを送信する通信データ送信部42と、指向性空中線である通信用空中線66と、通信用空中線66を回転可能に支持するロータリジョイント68と、ロータリジョイント68を介して通信用空中線66を回転させるモータエンコーダ70と、モータエンコーダ70を制御するモータ制御部72と、ダイオードリミッタ46と、通信データを受信する通信データ受信部48とを備える。
【0033】
通信用空中線66は、レーダ用空中線30よりも水平面内の指向性が広く、水平ビーム幅が20度程度の指向性空中線である。ロータリジョイント68はロータリジョイント32と同様であり、モータエンコーダ70はモータエンコーダ34と同様である。ダイオードリミッタ46は、ダイオードリミッタ36と同様にレーダ波の送信時の送信電力から通信データ受信部48を保護するために設けられている。
【0034】
<第2実施形態によるデータ通信の手順>
レーダ通信装置50によるデータ通信の手順について、説明する。
【0035】
まず、自船の周りの通信対象である他船の探知、続いて、自船から他船への通信データの送信が行われる。この他船の探知及び通信データの送信は、第1実施形態と同様の方法で行われるので、その説明を省略する。レーダ通信装置50において、第1実施形態に係るレーダ通信装置10と異なる処理として、他船の探知の際に、レーダ制御部56が、通信対象として特定された他船の位置情報を他船追尾部64に供給する。他船追尾部64は、他船の位置情報に基づいて、他船をレーダ送受信部54により随時探知することにより追尾し、追尾状況はレーダ指示部52の表示部に表示される。
【0036】
次に、自船における他船が送信した通信データの受信について説明する。通信送受信部60では、他船追尾部64は追尾する他船の位置情報を通信制御部62に供給し、通信制御部62は、他船方位θtを取得する。通信制御部62は、取得した他船方位θtをモータ制御部72を介して、モータエンコーダ70に供給する。モータエンコーダ70において、他船方位θtに基づいて通信用空中線66の受信方向が調整される。
【0037】
他船より送信された通信データを含む通信信号は通信用空中線66で受信され、ダイオードリミッタ46を介して、通信データ受信部48で受信され、増幅復調されて、通信制御部62を介して、通信操作部58に出力される。他船からの通信データは、通信操作部58の表示部に表示される。
【0038】
通信用空中線66は、水平ビーム幅が20度程度の指向性空中線であるので、通信対象である他船方向に受信面を向けることにより、他船からの通信データを容易に受信することができる。また、他船追尾部64により他船を追尾して、通信用空中線66の受信面を他船方向に向けることにより、他船から安定して通信データを受信することができる。また、待ち受け受信の際には、通信用空中線66を1rpm程度で回転させておけば、他船の呼び出し用通信データを受信することができる。呼び出し用通信データを受信した場合には、通信制御部62は呼び出し用通信データに含まれる他船の位置情報から他船方位θtを取得し、モータ制御部72を介して、モータエンコーダ70に供給する。モータエンコーダ70において、他船方位θtに基づいて通信用空中線66の受信方向が調整され、以後、呼び出しされた他船から通信データを受信することができる。
【0039】
レーダ通信装置50は、レーダ波の送受信を行うレーダ送受信部54と、通信データの送受信を行う通信送受信部60とを備え、前記通信データを前記レーダ波に合成して送受信することにより他船と通信するレーダ通信装置であって、前記通信データを受信し、受信した前記通信データを通信送受信部60に供給する通信用空中線66と、他船の方位を追尾する他船追尾部64を有し、レーダ送受信部54は、前記通信データを前記レーダ波に合成して、前記レーダ波を送受信するレーダ用空中線30より送信し、通信送受信部60は、他船追尾部64で取得した前記他船の方位に通信用空中線66を向けて、前記他船から前記通信データを受信する。
【0040】
レーダ通信装置50によれば、指向性空中線である通信用空中線66を有しているために、通信データの受信時の混信を防ぐことができる。
【0041】
<第3実施形態の構成>
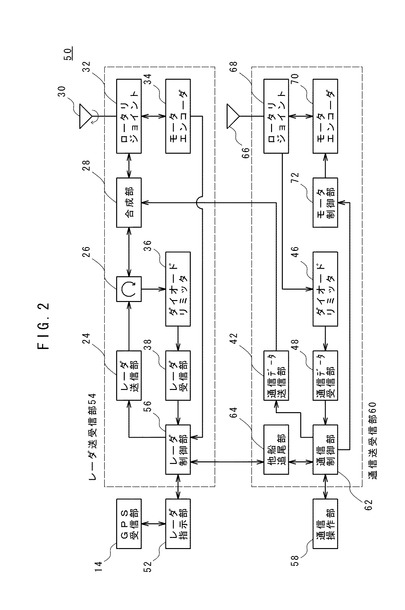
本発明の第3実施形態について、図3を参照して説明する。図3は、本発明の第3実施形態に係るレーダ通信装置80の説明図である。なお、図1に示したレーダ通信装置10、図2に示したレーダ通信装置50と同一の構成要素には同一の符号を付し、その詳細な説明を省略する。
【0042】
レーダ通信装置80は、レーダ指示部82と、GPS受信部14と、レーダ送受信部84と、通信操作部88と、通信送受信部90とを備える。
【0043】
レーダ指示部82は、レーダ指示部52と同様の指示部である。レーダ送受信部84は、基本的な構成はレーダ送受信部54と同様であるが、レーダ制御部56の代わりにレーダ制御部86を有し、また、合成部28を備えていない。
【0044】
通信操作部88は、通信操作部58と同様の操作部である。通信送受信部90は、基本的な構成は通信送受信部60と同様であるが、通信制御部62の代わりに通信制御部92を、通信用空中線66の代わりに送受信可能な指向性空中線である通信用空中線96を有し、通信データ送信部42と、ダイオードリミッタ46と、ロータリジョイント68との間にサーキュレータ94を備える。このサーキュレータ94は、サーキュレータ26と同様に3ポートサーキュレータである。また、通信用空中線96は、レーダ用空中線30よりも水平面内の指向性が広い。
【0045】
<第3実施形態によるデータ通信の手順>
レーダ通信装置80によるデータ通信の手順について、説明する。
【0046】
まず、自船の周りの通信対象である他船の探知が行われる。この他船の探知は、第1実施形態と同様の方法で行われるので、その説明を省略する。レーダ通信装置80において、第1実施形態に係るレーダ通信装置10と異なる処理として、レーダ制御部86が、通信対象として特定された他船の位置情報を他船追尾部64に供給する。他船追尾部64は、他船の位置情報に基づいて、他船をレーダ送受信部84により随時探知することにより追尾し、追尾状況はレーダ指示部82の表示部に表示される。
【0047】
次に、自船から他船への通信データの送信が行われる。レーダ通信装置80では、他船追尾部64は追尾する他船の位置情報を通信制御部92に供給し、通信制御部92は、他船方位θtを取得する。通信制御部92は、取得した他船方位θtをモータ制御部72を介して、モータエンコーダ70に供給する。モータエンコーダ70において、他船方位θtに基づいて通信用空中線96の送受信方向が調整される。
【0048】
オペレータによって通信操作部88が操作され、他船に送信する通信データが用意され、通信制御部92に供給される。通信制御部92は、前記通信データを通信データ送信部42に供給する。通信データ送信部42は、前記通信データに基づいて送信信号を生成し、サーキュレータ94、ロータリジョイント68を介して通信用空中線96から他船に向けて送信する。自船から他船に送信された通信データの他船における受信については、第1実施形態と同様であるので、その説明を省略する。
【0049】
自船における他船が送信した通信データの受信について説明する。通信送受信部90では、他船追尾部64は追尾する他船の位置情報を通信制御部92に供給し、通信制御部92は、他船方位θtを取得する。通信制御部92は、取得した他船方位θtをモータ制御部72を介して、モータエンコーダ70に供給する。モータエンコーダ70において、他船方位θtに基づいて通信用空中線96の受信方向が調整される。他船より送信された通信データを含む通信信号は通信用空中線96で受信され、サーキュレータ94、ダイオードリミッタ46を介して、通信データ受信部48で受信され、増幅復調されて、通信制御部92を介して、通信操作部88に出力される。他船からの通信データは、通信操作部88の表示部に表示される。
【0050】
レーダ通信装置80における通信用空中線96は、レーダ通信装置50が備える通信用空中線66と受信機能においては同様であるので、他船からの通信データの受信についても第2実施形態と同様の作用、効果を奏する。
【0051】
レーダ通信装置80は、レーダ波の送受信を行うレーダ送受信部84と、通信データの送受信を行う通信送受信部90とを備え、前記通信データを前記レーダ波に合成して送受信することにより他船と通信するレーダ通信装置であって、他船の方位を追尾する他船方位追尾部64を有し、通信用空中線96は、前記レーダ波を送受信するレーダ用空中線30よりも水平面内の指向性が広く、前記通信データを送受信可能であって、通信送受信部90は、他船追尾部64で取得した前記他船の方位に通信用空中線96を向けて、前記他船と通信する。
【0052】
レーダ通信装置80によれば、指向性空中線である通信用空中線96を有しているために、通信データの送信時の送信電力を低減できるとともに、受信時の混信を防ぐことができる。また、送信側及び受信側の船舶は、空中線を停止せずにデータ通信時においても、また、レーダによる物標の探知をすることができる。さらに、送信側船舶及び受信側船舶もレーダ通信装置80を備えている場合には、連続通信が可能となる。
【0053】
なお、本発明は、上述の実施形態に限らず、本発明の要旨を逸脱することなく、種々の構成を採り得ることはもちろんである。
【符号の説明】
【0054】
10,50,80…レーダ通信装置
12,52,82…レーダ指示部
14…GPS受信部
16,54,84…レーダ送受信部
18,58,88…通信操作部
20,60,90…通信送受信部
22,56,86…レーダ制御部
24…レーダ送信部
26,94…サーキュレータ
28…合成部
32,68…ロータリジョイント
30…レーダ用空中線
34,70…モータエンコーダ
36,46…ダイオードリミッタ
38…レーダ受信部
40,62,92…通信制御部
42…通信データ送信部
44,66,96…通信用空中線
48…通信データ受信部
64…他船追尾部
72…モータ制御部
【技術分野】
【0001】
本発明は、レーダ波の送受信を行うレーダ送受信部と、通信データの送受信を行う通信送受信部とを備え、前記通信データを前記レーダ波に合成して送受信することにより他船と通信するレーダ通信装置に関する。
【背景技術】
【0002】
従来、船舶同士が通信を行うためには、レーダ装置以外に通信装置が搭載されていた。船舶が商船の場合には、通信装置として、国際VHF無線装置やインマルサット衛星通信装置等が搭載され、船舶が小型漁船の場合には、通信装置として、SSB無線装置等が搭載されていた。従って、商船と小型漁船との通信装置は異なるために、両船舶間で通信することはできなかった。このような通信装置が異なる船舶同士の通信を実現すべく、船舶間の通信方法が研究されている。
【0003】
特許文献1には、レーダ波に通信データを合成させて、レーダ装置を利用して船舶同士の通信を行う通信装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−8069号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載の通信装置では、受信側の船舶は、空中線の回転を停止して、通信データを受信している。従って、受信側の船舶は、通信データを受信している間、空中線が停止しているために、レーダによる物標の探知をすることができない。また、特許文献1に記載の通信装置で用いられる空中線の水平ビーム幅は、1〜5度と非常に狭いために自船の空中線と他船の空中線とが正対しないと通信データを送受信することができないという不具合がある。
【0006】
本発明は、上記の課題を考慮してなされたものであって、空中線が回転している他船の船舶と通信可能なレーダ通信装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明に係るレーダ通信装置は、レーダ波の送受信を行うレーダ送受信部と、通信データの送受信を行う通信送受信部とを備え、前記通信データを送受信することにより他船と通信するレーダ通信装置であって、回転する前記他船の空中線から送信された前記通信データを受信し、受信した前記通信データを前記通信送受信部に供給する通信用空中線を有することを特徴とする。
【0008】
前記レーダ通信装置において、前記レーダ送受信部は、前記通信データを前記レーダ波に合成して、前記レーダ波を送受信するレーダ用空中線より送信し、前記通信用空中線は、無指向性であることを特徴とする。
【0009】
前記レーダ通信装置において、他船の方位を追尾する他船方位追尾部を有し、前記レーダ送受信部は、前記通信データを前記レーダ波に合成して、前記レーダ波を送受信するレーダ用空中線より送信し、前記通信送受信部は、前記他船方位追尾部で取得した前記他船の方位に指向性を有する前記通信用空中線を向けて、前記他船から前記通信データを受信することを特徴とする。
【0010】
前記レーダ通信装置において、他船の方位を追尾する他船方位追尾部を有し、前記通信用空中線は、前記レーダ波を送受信するレーダ用空中線よりも水平面内の指向性が広く、前記通信データを送受信可能であって、前記通信送受信部は、前記他船方位追尾部で取得した前記他船の方位に指向性を有する前記通信用空中線を向けて、前記他船と通信することを特徴とする。
【発明の効果】
【0011】
本発明のレーダ通信装置によれば、通信データの受信用として、無指向性の通信用空中線を有しているために、他船から送信された通信データを容易に受信することができる。また、通信データの受信用の通信用空中線が指向性空中線である場合には、通信データの受信時の混信を防ぐことができ、また、通信データの送受信用の通信用空中線が指向性空中線である場合には、通信データの送信時の送信電力を低減できる。さらに、送信側及び受信側の船舶は、空中線を停止せずにデータ通信時においても、レーダによる物標の探知をすることができる。
【図面の簡単な説明】
【0012】
【図1】本発明の第1実施形態に係るレーダ通信装置の説明図である。
【図2】本発明の第2実施形態に係るレーダ通信装置の説明図である。
【図3】本発明の第3実施形態に係るレーダ通信装置の説明図である。
【発明を実施するための形態】
【0013】
<第1実施形態の構成>
以下、本発明の実施形態について図面を参照して説明する。図1は、本発明の第1実施形態に係るレーダ通信装置10の説明図である。
【0014】
レーダ通信装置10は、レーダ指示部12と、GPS受信部14と、レーダ送受信部16と、通信操作部18と、通信送受信部20とを備える。
【0015】
レーダ指示部12は、レーダ波の送受信により他船等を探知するために操作する操作部であって、探知した他船等を表示する表示部(図示無し)を備える。GPS受信部14は、自船の位置情報を取得する受信部である。
【0016】
レーダ送受信部16は、レーダ波の送受信を制御するレーダ制御部22と、送信信号としてレーダ波を送信するレーダ送信部24と、3ポートサーキュレータであるサーキュレータ26と、レーダ波と通信データとを合成する合成部28と、水平ビーム幅が狭い指向性空中線であるレーダ用空中線30と、レーダ用空中線30を回転可能に支持するロータリジョイント32と、ロータリジョイント32を介してレーダ用空中線30を回転させるモータエンコーダ34と、ダイオードリミッタ36と、反射波を反射信号として受信するレーダ受信部38とを備える。レーダ用空中線30の水平ビーム幅としては、1〜5度程度であり、モータエンコーダ34は、自船の船首方向に対するレーダ用空中線30の相対方位をレーダ用空中線30の回転角度情報として検出するエンコーダ機能を有する。ダイオードリミッタ36は、レーダ波の送信時の送信電力からレーダ受信部38を保護するために設けられている。
【0017】
通信操作部18は、通信データを通信送受信部20において送受信するための操作をする操作部であって、通信データを表示する表示部(図示無し)を備える。
【0018】
通信送受信部20は、通信データの送受信を制御する通信制御部40と、通信データを送信する通信データ送信部42と、無指向性空中線である通信用空中線44と、ダイオードリミッタ46と、通信データを受信する通信データ受信部48とを備える。ダイオードリミッタ46は、ダイオードリミッタ36と同様にレーダ波の送信時の送信電力から通信データ受信部48を保護するために設けられている。
【0019】
<第1実施形態によるデータ通信の手順>
次に、レーダ通信装置10によるデータ通信の手順について、説明する。
【0020】
レーダ通信装置10では、まず、自船の周りの通信対象である他船の探知が行われる。通信操作部18から自船の周りの他船の探知をするための指示信号が通信制御部40を介してレーダ制御部22に供給される。レーダ制御部22は、レーダ用空中線30を回転させるための指示信号をモータエンコーダ34に供給し、ロータリジョイント32を介してモータエンコーダ34によってレーダ用空中線30が回転する。レーダ送信部24は、レーダ波として送信される送信信号を生成し、サーキュレータ26、合成部28、ロータリジョイント32を介して、送信信号がレーダ用空中線30に供給され、レーダ波としてレーダ用空中線30より放射される。また、この際、モータエンコーダ34は、自船の船首方向に対するレーダ用空中線30の相対方位を回転角度情報として検出し、前記回転角度情報に基づいて回転同期信号を生成し、レーダ制御部22に供給する。
【0021】
放射されたレーダ波は、他船を含む物標で反射され、反射波がレーダ用空中線30で受信される。受信された反射波は、ロータリジョイント32、合成部28、サーキュレータ26、ダイオードリミッタ36を介してレーダ受信部38に反射信号として供給される。レーダ受信部38は、反射信号を信号処理して映像表示信号に変換し、レーダ制御部22に供給する。レーダ制御部22は、前記回転同期信号及び映像表示信号をレーダ指示部12に供給し、他船を含めた物標の位置がレーダ指示部12の表示部に表示される。
【0022】
次に、自船から他船への通信データの送信が行われる。通信制御部40からレーダ制御部22への指示によりレーダ指示部12の表示部において通信対象となる他船が特定される。レーダ制御部22は、レーダ指示部12から特定した他船の方位情報として他船方位θtを取得し、モータエンコーダ34へ供給する。オペレータによって通信操作部18が操作され、他船に送信する通信データが用意され、通信制御部40に供給される。通信制御部40は、前記通信データを通信データ送信部42に供給し、通信データ送信部42によって通信データが合成部28に供給される。合成部28では、通信制御部40からレーダ制御部22への指示に従って、レーダ送信部24において、送信信号が生成され、サーキュレータ26を介して合成部28に供給される。合成部28において、供給された送信信号と、前記通信データを含む通信信号とが合成される。モータエンコーダ34において、他船方位θtに基づいて放射方向が調整され、合成された信号は、ロータリジョイント32を介してレーダ用空中線30よりレーダ波として他船方位θtの方向に放射される。
【0023】
他船の空中線が無指向性空中線の場合には、自船から放射されたレーダ波は、他船での自船の方位に依存することなく受信され、自船から他船への通信データの送信が完了する。また、他船の空中線が指向性空中線の場合には、水平ビーム幅が20度程度以上あれば、空中線が、大略、自船の方向に向いていれば、実用上問題なく、他船は、自船から通信データを受信することができる。
【0024】
また、他船を呼び出して通信する呼び出し通信をする際には、呼び出し用通信データとして、自船の識別符号及びGPS受信部14で取得した位置情報を所定時間、例えば1分間、他船に連続送信することにより行うことができる。他船に自船の識別符号及び位置情報を送信することにより、他船は、自船からの呼び出し通信に対して、応答することができる。他船の空中線の水平ビーム幅が20度程度の指向性の通信用空中線の場合に、他船の通信用空中線が1rpm程度にあれば、呼び出し用通信データを受信でき、その後、通信用空中線を受信信号の強度が最大の方位に維持して、他船は自船からの通信データを受信することができる。
【0025】
次に、自船における他船が送信した通信データの受信について説明する。他船より送信された通信データを含む通信信号は空中線44で受信され、ダイオードリミッタ46を介して、通信データ受信部48で受信され、増幅復調されて、通信制御部40を介して、通信操作部18に出力される。他船からの通信データは、通信操作部18の表示部に表示される。通信用空中線44は、無指向性空中線であるので、他船のレーダ波を放射する空中線が指向性空中線であっても、他船の空中線が自船方向に向けられていれば、通信データを受信することができる。
【0026】
レーダ通信装置10は、レーダ波の送受信を行うレーダ送受信部16と、通信データの送受信を行う通信送受信部20とを備え、前記通信データを送受信することにより他船と通信するレーダ通信装置であって、回転する前記他船の空中線から送信された前記通信データを受信し、受信した前記通信データを前記通信送受信部20に供給する通信用空中線を有する。レーダ送受信部16は、前記通信データを前記レーダ波に合成して、前記レーダ波を送受信するレーダ用空中線30より送信し、通信用空中線44は、受信用の無指向性空中線である。
【0027】
レーダ通信装置10によれば、通信データの受信用として、無指向性の通信用空中線を有しているために、他船から送信された通信データを容易に受信することができる。
【0028】
<第2実施形態の構成>
次に、本発明の第2実施形態について、図2を参照して説明する。図2は、本発明の第2実施形態に係るレーダ通信装置50の説明図である。なお、図1に示したレーダ通信装置10と同一の構成要素には同一の符号を付し、その詳細な説明を省略する。
【0029】
レーダ通信装置50は、レーダ指示部52と、GPS受信部14と、レーダ送受信部54と、通信操作部58と、通信送受信部60とを備える。
【0030】
レーダ指示部52は、レーダ指示部12と同様の指示部であって、さらに、後述する他船追尾部64により追尾する他船も表示しうる。レーダ送受信部54は、基本的な構成はレーダ送受信部16と同様であり、レーダ制御部22の代わりにレーダ制御部56を有する。
【0031】
通信操作部58は、通信データを通信送受信部60において送受信するための操作をする操作部であって、通信データを表示する表示部(図示無し)を備える。
【0032】
通信送受信部60は、通信データの送受信を制御する通信制御部62と、レーダ送受信部54で特定した他船の位置を追尾するための信号処理を行う他船追尾部64、通信データを送信する通信データ送信部42と、指向性空中線である通信用空中線66と、通信用空中線66を回転可能に支持するロータリジョイント68と、ロータリジョイント68を介して通信用空中線66を回転させるモータエンコーダ70と、モータエンコーダ70を制御するモータ制御部72と、ダイオードリミッタ46と、通信データを受信する通信データ受信部48とを備える。
【0033】
通信用空中線66は、レーダ用空中線30よりも水平面内の指向性が広く、水平ビーム幅が20度程度の指向性空中線である。ロータリジョイント68はロータリジョイント32と同様であり、モータエンコーダ70はモータエンコーダ34と同様である。ダイオードリミッタ46は、ダイオードリミッタ36と同様にレーダ波の送信時の送信電力から通信データ受信部48を保護するために設けられている。
【0034】
<第2実施形態によるデータ通信の手順>
レーダ通信装置50によるデータ通信の手順について、説明する。
【0035】
まず、自船の周りの通信対象である他船の探知、続いて、自船から他船への通信データの送信が行われる。この他船の探知及び通信データの送信は、第1実施形態と同様の方法で行われるので、その説明を省略する。レーダ通信装置50において、第1実施形態に係るレーダ通信装置10と異なる処理として、他船の探知の際に、レーダ制御部56が、通信対象として特定された他船の位置情報を他船追尾部64に供給する。他船追尾部64は、他船の位置情報に基づいて、他船をレーダ送受信部54により随時探知することにより追尾し、追尾状況はレーダ指示部52の表示部に表示される。
【0036】
次に、自船における他船が送信した通信データの受信について説明する。通信送受信部60では、他船追尾部64は追尾する他船の位置情報を通信制御部62に供給し、通信制御部62は、他船方位θtを取得する。通信制御部62は、取得した他船方位θtをモータ制御部72を介して、モータエンコーダ70に供給する。モータエンコーダ70において、他船方位θtに基づいて通信用空中線66の受信方向が調整される。
【0037】
他船より送信された通信データを含む通信信号は通信用空中線66で受信され、ダイオードリミッタ46を介して、通信データ受信部48で受信され、増幅復調されて、通信制御部62を介して、通信操作部58に出力される。他船からの通信データは、通信操作部58の表示部に表示される。
【0038】
通信用空中線66は、水平ビーム幅が20度程度の指向性空中線であるので、通信対象である他船方向に受信面を向けることにより、他船からの通信データを容易に受信することができる。また、他船追尾部64により他船を追尾して、通信用空中線66の受信面を他船方向に向けることにより、他船から安定して通信データを受信することができる。また、待ち受け受信の際には、通信用空中線66を1rpm程度で回転させておけば、他船の呼び出し用通信データを受信することができる。呼び出し用通信データを受信した場合には、通信制御部62は呼び出し用通信データに含まれる他船の位置情報から他船方位θtを取得し、モータ制御部72を介して、モータエンコーダ70に供給する。モータエンコーダ70において、他船方位θtに基づいて通信用空中線66の受信方向が調整され、以後、呼び出しされた他船から通信データを受信することができる。
【0039】
レーダ通信装置50は、レーダ波の送受信を行うレーダ送受信部54と、通信データの送受信を行う通信送受信部60とを備え、前記通信データを前記レーダ波に合成して送受信することにより他船と通信するレーダ通信装置であって、前記通信データを受信し、受信した前記通信データを通信送受信部60に供給する通信用空中線66と、他船の方位を追尾する他船追尾部64を有し、レーダ送受信部54は、前記通信データを前記レーダ波に合成して、前記レーダ波を送受信するレーダ用空中線30より送信し、通信送受信部60は、他船追尾部64で取得した前記他船の方位に通信用空中線66を向けて、前記他船から前記通信データを受信する。
【0040】
レーダ通信装置50によれば、指向性空中線である通信用空中線66を有しているために、通信データの受信時の混信を防ぐことができる。
【0041】
<第3実施形態の構成>
本発明の第3実施形態について、図3を参照して説明する。図3は、本発明の第3実施形態に係るレーダ通信装置80の説明図である。なお、図1に示したレーダ通信装置10、図2に示したレーダ通信装置50と同一の構成要素には同一の符号を付し、その詳細な説明を省略する。
【0042】
レーダ通信装置80は、レーダ指示部82と、GPS受信部14と、レーダ送受信部84と、通信操作部88と、通信送受信部90とを備える。
【0043】
レーダ指示部82は、レーダ指示部52と同様の指示部である。レーダ送受信部84は、基本的な構成はレーダ送受信部54と同様であるが、レーダ制御部56の代わりにレーダ制御部86を有し、また、合成部28を備えていない。
【0044】
通信操作部88は、通信操作部58と同様の操作部である。通信送受信部90は、基本的な構成は通信送受信部60と同様であるが、通信制御部62の代わりに通信制御部92を、通信用空中線66の代わりに送受信可能な指向性空中線である通信用空中線96を有し、通信データ送信部42と、ダイオードリミッタ46と、ロータリジョイント68との間にサーキュレータ94を備える。このサーキュレータ94は、サーキュレータ26と同様に3ポートサーキュレータである。また、通信用空中線96は、レーダ用空中線30よりも水平面内の指向性が広い。
【0045】
<第3実施形態によるデータ通信の手順>
レーダ通信装置80によるデータ通信の手順について、説明する。
【0046】
まず、自船の周りの通信対象である他船の探知が行われる。この他船の探知は、第1実施形態と同様の方法で行われるので、その説明を省略する。レーダ通信装置80において、第1実施形態に係るレーダ通信装置10と異なる処理として、レーダ制御部86が、通信対象として特定された他船の位置情報を他船追尾部64に供給する。他船追尾部64は、他船の位置情報に基づいて、他船をレーダ送受信部84により随時探知することにより追尾し、追尾状況はレーダ指示部82の表示部に表示される。
【0047】
次に、自船から他船への通信データの送信が行われる。レーダ通信装置80では、他船追尾部64は追尾する他船の位置情報を通信制御部92に供給し、通信制御部92は、他船方位θtを取得する。通信制御部92は、取得した他船方位θtをモータ制御部72を介して、モータエンコーダ70に供給する。モータエンコーダ70において、他船方位θtに基づいて通信用空中線96の送受信方向が調整される。
【0048】
オペレータによって通信操作部88が操作され、他船に送信する通信データが用意され、通信制御部92に供給される。通信制御部92は、前記通信データを通信データ送信部42に供給する。通信データ送信部42は、前記通信データに基づいて送信信号を生成し、サーキュレータ94、ロータリジョイント68を介して通信用空中線96から他船に向けて送信する。自船から他船に送信された通信データの他船における受信については、第1実施形態と同様であるので、その説明を省略する。
【0049】
自船における他船が送信した通信データの受信について説明する。通信送受信部90では、他船追尾部64は追尾する他船の位置情報を通信制御部92に供給し、通信制御部92は、他船方位θtを取得する。通信制御部92は、取得した他船方位θtをモータ制御部72を介して、モータエンコーダ70に供給する。モータエンコーダ70において、他船方位θtに基づいて通信用空中線96の受信方向が調整される。他船より送信された通信データを含む通信信号は通信用空中線96で受信され、サーキュレータ94、ダイオードリミッタ46を介して、通信データ受信部48で受信され、増幅復調されて、通信制御部92を介して、通信操作部88に出力される。他船からの通信データは、通信操作部88の表示部に表示される。
【0050】
レーダ通信装置80における通信用空中線96は、レーダ通信装置50が備える通信用空中線66と受信機能においては同様であるので、他船からの通信データの受信についても第2実施形態と同様の作用、効果を奏する。
【0051】
レーダ通信装置80は、レーダ波の送受信を行うレーダ送受信部84と、通信データの送受信を行う通信送受信部90とを備え、前記通信データを前記レーダ波に合成して送受信することにより他船と通信するレーダ通信装置であって、他船の方位を追尾する他船方位追尾部64を有し、通信用空中線96は、前記レーダ波を送受信するレーダ用空中線30よりも水平面内の指向性が広く、前記通信データを送受信可能であって、通信送受信部90は、他船追尾部64で取得した前記他船の方位に通信用空中線96を向けて、前記他船と通信する。
【0052】
レーダ通信装置80によれば、指向性空中線である通信用空中線96を有しているために、通信データの送信時の送信電力を低減できるとともに、受信時の混信を防ぐことができる。また、送信側及び受信側の船舶は、空中線を停止せずにデータ通信時においても、また、レーダによる物標の探知をすることができる。さらに、送信側船舶及び受信側船舶もレーダ通信装置80を備えている場合には、連続通信が可能となる。
【0053】
なお、本発明は、上述の実施形態に限らず、本発明の要旨を逸脱することなく、種々の構成を採り得ることはもちろんである。
【符号の説明】
【0054】
10,50,80…レーダ通信装置
12,52,82…レーダ指示部
14…GPS受信部
16,54,84…レーダ送受信部
18,58,88…通信操作部
20,60,90…通信送受信部
22,56,86…レーダ制御部
24…レーダ送信部
26,94…サーキュレータ
28…合成部
32,68…ロータリジョイント
30…レーダ用空中線
34,70…モータエンコーダ
36,46…ダイオードリミッタ
38…レーダ受信部
40,62,92…通信制御部
42…通信データ送信部
44,66,96…通信用空中線
48…通信データ受信部
64…他船追尾部
72…モータ制御部
【特許請求の範囲】
【請求項1】
レーダ波の送受信を行うレーダ送受信部と、
通信データの送受信を行う通信送受信部とを備え、
前記通信データを送受信することにより他船と通信するレーダ通信装置であって、
回転する前記他船の空中線から送信された前記通信データを受信し、受信した前記通信データを前記通信送受信部に供給する通信用空中線を有することを特徴とするレーダ通信装置。
【請求項2】
請求項1記載のレーダ通信装置において、
前記レーダ送受信部は、前記通信データを前記レーダ波に合成して、前記レーダ波を送受信するレーダ用空中線より送信し、
前記通信用空中線は、無指向性であることを特徴とするレーダ通信装置。
【請求項3】
請求項1記載のレーダ通信装置において、
他船の方位を追尾する他船方位追尾部を有し、
前記レーダ送受信部は、前記通信データを前記レーダ波に合成して、前記レーダ波を送受信するレーダ用空中線より送信し、
前記通信送受信部は、前記他船方位追尾部で取得した前記他船の方位に指向性を有する前記通信用空中線を向けて、前記他船から前記通信データを受信することを特徴とするレーダ通信装置。
【請求項4】
請求項1記載のレーダ通信装置において、
他船の方位を追尾する他船方位追尾部を有し、
前記通信用空中線は、前記レーダ波を送受信するレーダ用空中線よりも水平面内の指向性が広く、前記通信データを送受信可能であって、
前記通信送受信部は、前記他船方位追尾部で取得した前記他船の方位に指向性を有する前記通信用空中線を向けて、前記他船と通信することを特徴とするレーダ通信装置。
【請求項1】
レーダ波の送受信を行うレーダ送受信部と、
通信データの送受信を行う通信送受信部とを備え、
前記通信データを送受信することにより他船と通信するレーダ通信装置であって、
回転する前記他船の空中線から送信された前記通信データを受信し、受信した前記通信データを前記通信送受信部に供給する通信用空中線を有することを特徴とするレーダ通信装置。
【請求項2】
請求項1記載のレーダ通信装置において、
前記レーダ送受信部は、前記通信データを前記レーダ波に合成して、前記レーダ波を送受信するレーダ用空中線より送信し、
前記通信用空中線は、無指向性であることを特徴とするレーダ通信装置。
【請求項3】
請求項1記載のレーダ通信装置において、
他船の方位を追尾する他船方位追尾部を有し、
前記レーダ送受信部は、前記通信データを前記レーダ波に合成して、前記レーダ波を送受信するレーダ用空中線より送信し、
前記通信送受信部は、前記他船方位追尾部で取得した前記他船の方位に指向性を有する前記通信用空中線を向けて、前記他船から前記通信データを受信することを特徴とするレーダ通信装置。
【請求項4】
請求項1記載のレーダ通信装置において、
他船の方位を追尾する他船方位追尾部を有し、
前記通信用空中線は、前記レーダ波を送受信するレーダ用空中線よりも水平面内の指向性が広く、前記通信データを送受信可能であって、
前記通信送受信部は、前記他船方位追尾部で取得した前記他船の方位に指向性を有する前記通信用空中線を向けて、前記他船と通信することを特徴とするレーダ通信装置。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2013−113606(P2013−113606A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−257564(P2011−257564)
【出願日】平成23年11月25日(2011.11.25)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成20〜22年度電波資源拡大のための研究開発における委託研究、産業技術力強化法第19条の適用を受ける特許出願
【出願人】(592072344)武蔵野電機株式会社 (2)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月25日(2011.11.25)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成20〜22年度電波資源拡大のための研究開発における委託研究、産業技術力強化法第19条の適用を受ける特許出願
【出願人】(592072344)武蔵野電機株式会社 (2)
【Fターム(参考)】
[ Back to top ]