
レール変位量測定におけるレール検出方法およびレール変位量測定装置
【課題】
レール近傍にあって頭面がレールに比べて比較的幅のある平面形状の物体をレールと誤検出することを防止することができるレール変位量測定装置におけるレール検出方法を提供することにある。
【解決手段】
この発明は、測定三角形が形成されたときのこの測定三角形において測定されるレールの位置とこの測定三角形において第1の距離検出器あるいは第2の距離検出器のいずれかにより測定されるレールの位置との位置誤差を算出して、この位置誤差が所定値の範囲にあるときに測定対象をレールとして検出する。
レール近傍にあって頭面がレールに比べて比較的幅のある平面形状の物体をレールと誤検出することを防止することができるレール変位量測定装置におけるレール検出方法を提供することにある。
【解決手段】
この発明は、測定三角形が形成されたときのこの測定三角形において測定されるレールの位置とこの測定三角形において第1の距離検出器あるいは第2の距離検出器のいずれかにより測定されるレールの位置との位置誤差を算出して、この位置誤差が所定値の範囲にあるときに測定対象をレールとして検出する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、レール変位量測定におけるレール検出方法およびレール変位量測定装置に関し、詳しくは、既知の距離にある2点に配置された距離センサとレールとの間で測定三角形を形成して2点からレールに測定光を照射してレールの位置を測定するレール変位量測定において、脱線防止用ガードレール等の軌道内にある頭面がレールに比べて比較的幅のある平面形状の物体をレールと誤検出することを防止することができるようなレール検出方法およびレール変位量測定装置に関する。
【背景技術】
【0002】
列車運行の安全を確保するために、軌道検測車は、レール変位量測定装置を搭載し、これによりレール間が基準ゲージの軌道間隔あるいはその許容範囲の間隔にあるか否かを定期的に測定している。
従来のレール変位量測定装置として、既知の距離にある2点に配置された距離センサ(レーザ変位センサ)とレールとの間で測定三角形を形成して2点の距離センサ(レーザ変位センサ)から測定光をレールに照射し、レールの位置を測定するものがある。
これは、レールとレーザ変位センサとの間に回動ミラーを介在させてレール上の特定の測定点の変動に応じて回動ミラーを追従回動させてレール上の測定点を追従制御することで測定三角形を維持しながらレールの測定点と測定基準点との距離(位置座標)を検出してレール変位量を測定するものである。
この測定技術は、車体が上下左右に変動する走行車輪のばねより上のシャーシ等に変位検出器(2点に配置されたレーザ変位センサ)を左右のレールに対応してそれぞれ設けるもので、レールの左右の変位量を測定三角形の角度と距離とから三角法を利用して演算処理において高精度に測定するができる。しかも、距離検出器を小型化することを可能にしている(特許文献1,2)。
【0003】
ところで、検測車が走行する軌道上には脱線防止用ガードレールがレールに沿って所定の間隔を置いて軌道の内側に敷設されている。この脱線防止用ガードレールは、走行車輪がレール横断方向に一定以上移動することを阻止することにより脱線を防止する。
レールと脱線防止用ガードレールとの間隔は、通常、80mm程度はあり、脱線防止用ガードレールは、レールより10mm〜25mm高く設置されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2001−41705号公報
【特許文献2】特開2003−254740号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
三角法を利用して演算処理によりレールの位置(変位量)を測定する従来のレール変位量測定装置にあっては、分岐やレール継目等でレールに対する追従が外れることがある。このようなときにはレールが検出されなくなるのでレール検出が必要になる。このようなときにレール検出をすると、脱線防止用ガードレールをレールと誤認して脱線防止用ガードレールに追従してレール変位量測定が行われてしまう問題がある。
これと同様に、踏切などでも脱線防止用ガードレールと同様に地面がレールに沿って形成されている。この踏切の地面も車両の傾斜などによりレールと誤認される対象になる。
すなわち、三角法を利用する前記した従来のレール変位量測定では、レール近傍にあってレールと同様な上部が平面状の物体をレールと誤検出する傾向がる。
【0006】
したがって、この発明の目的は、このような従来技術の問題点を解決するものであって、レール近傍にあって頭面がレールに比べて比較的幅のある平面形状の物体をレールと誤検出することを防止することができるレール変位量測定装置におけるレール検出方法を提供することにある。
この発明の他の目的は、レール追従制御のためのレール検出のデータ処理を行う装置の処理ロードを低減してレール変位量の測定精度を向上させることができるレール変位量測定装置を提供することにある。
【課題を解決するための手段】
【0007】
このような目的を達成するためのこの発明のレール変位量測定におけるレール検出方法およびレール変位量測定装置の特徴は、既知の距離にある2点に配置された第1および第2の距離検出器とレールとの間で測定三角形を形成して第1および第2の距離検出器から測定光をレールに照射してレールの位置を測定するレール変位量測定装置におけるレール検出方法であって、
第1の距離検出器の測定光をレールの頭面に照射し、第2の距離検出器の測定光をレール頭部の内軌側側面に照射して測定三角形を形成してこの測定三角形において測定されるレールの位置とこの測定三角形において第1の距離検出器および第2の距離検出器のいずれかにより測定されるレールの位置との位置誤差をレール変位量測定装置において算出して、この位置誤差が所定値の範囲にあるときにレール変位量測定装置が測定対象をレールとするものである。
【発明の効果】
【0008】
レール位置の近傍に設けられる脱線防止用ガードレールを始めとして、踏切の地面等の頭面がレールに比べて比較的幅のある平面形状の物体は、検測車の車体が傾斜することなどにより、レールの位置が変動すると、同時に軌道内にある物体もレールの位置に併せて同様の方向にシフトしてレール変位量測定装置に検出されることがある。
レールの形状は、頭面が狭い平面で側面方向に湾曲した特殊な頭部形状をしている。その上、レールと距離検出器との間で形成される測定三角形の測定光の1つが頭部側面を照射することから測定対象との間に形成される測定三角形は、脱線防止用ガードレール等の頭面が比較的幅のある平面形状の物体とは異なってくる。
発明者等は、この測定三角形の形成形態の相違が測定三角形により測定されるレールの位置と距離検出器の1つで測定されるレールの位置との位置誤差として表れてくることに着目した。
そこで、この発明は、この位置誤差を基準としてレールと軌道内にある他の物体とを区分けして測定対象がレールであるか否かの判定をする。
【0009】
すなわち、この発明は、測定三角形が形成されたときのこの測定三角形において測定されるレールの位置とこの測定三角形において第1の距離検出器あるいは第2の距離検出器のいずれかにより測定されるレールの位置との位置誤差を算出して、この位置誤差が所定値の範囲にあるときに測定対象をレールとして検出する。
これにより、車両が傾斜するカーブ等でレールの位置が大きく変化してレールに対する追従が外れてレールが検出されないときのレール検出においても脱線防止用ガードレール等の軌道内にある物体をレールと誤認することが防止され、容易にレールだけを検出することができる。
しかも、この場合のレール検出処理は、位置誤差の算出だけで済むので、データ処理を行う装置の処理ロードは小さいものとなる。したがって、後述するように、レールからの反射光がなくあるいは規定値以下となってレール未検状態となる場合に限らずに、この発明では、常時、レール判定をしながらレール変位量の測定をすることで、レールに沿って設けられた踏切の地面などの頭面がレールに比べて比較的幅のある平面形状の物体に対する誤認も防止することができる。
その結果、追従制御のためのレール検出の処理ロードが低減でき、レール近傍に設けられるレール以外の検出を防止することができ、レールの追従を外れて軌道内にある物体をレールと誤検出して変位量測定することがほとんどなくなる。
【図面の簡単な説明】
【0010】
【図1】図1は、この発明を適用した一実施例の軌道検測車に搭載されたレール変位量測定装置の説明図である。
【図2】図2は、測定三角形からレールの位置を算出する算出原理の説明図である。
【図3】図3は、脱線防止用ガードレール等に対して形成される測定三角形についての説明図である。
【図4】図4は、頭面がレールに比べて比較的幅のある平面形状の物体に対して形成される測定三角形についての説明図である。
【図5】図5は、レール変位量測定におけるレール検出処理のフローチャートである。
【発明を実施するための形態】
【0011】
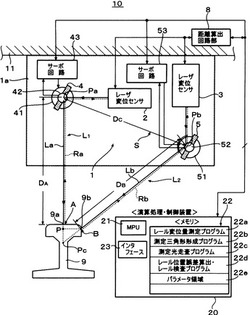
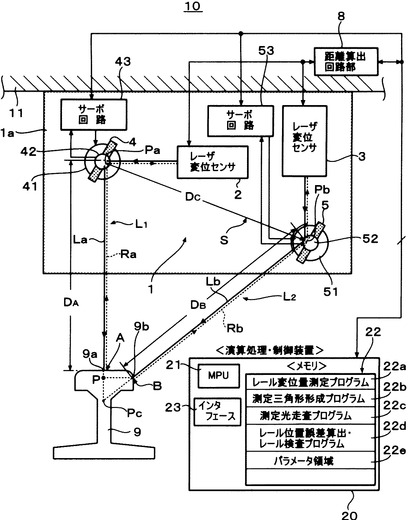
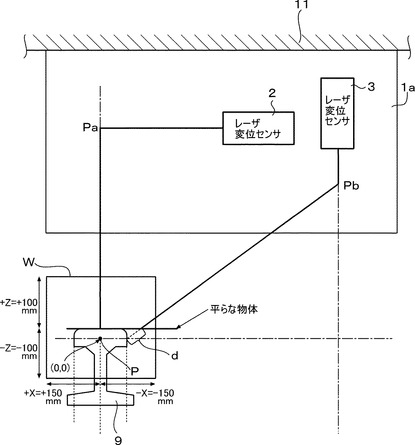
図1は、軌道検測車に搭載されたレール変位量測定装置の説明図であって、この図1において、10は、レール変位量測定装置である。1は、左右のレールに対応してそれぞれに設けられたレール変位検出器であり、図では、左側のレール9に対応するレール変位検出器1のみを示してある。右側のレールについては、単にレール変位検出器1のレーザ変位センサが軌道中心に対して対称に配置されるだけであり、その構造上においては本質的な相違はないので、左側のレール9について以下説明し、右側のレールについては割愛する。
レール変位検出器1の測定基板1aには上下方向の距離検出のレーザ変位センサ2と左右方向の距離検出のレーザ変位センサ3とがそれぞれ設けられている。
【0012】
レーザ変位センサ2は、自己の測定基準点Paとレール9の頭頂面(頭面の中央)9a(測定点A)との間の変位量(距離)を検出する検出信号を発生する。レーザ変位センサ3は、自己の測定基準点Pbとレール9の内軌側側面(軌道におけるレール内側側面)9b(測定点B)との間の変位量(距離)を検出する検出信号を発生する。
Laは、レーザ変位センサ2の投光光であり、Raは、レーザ変位センサ2の受光光である。Lbは、レーザ変位センサ3の投光光であり、Rbは、レーザ変位センサ3の受光光である。
測定基板1aは、検測車の車体動揺の影響を受けるばね上のシャーシ(車体)11に取付けられ、測定基板1aには回動ミラー4がレーザ変位センサ2の投受光光路L1に介在するように設けられ、また、回動ミラー5がレーザ変位センサ3の投受光光路L2に同様に設けられている。ここでは、回動ミラー4,5のそれぞれの測定光の反射位置がそれぞれの測定基準点Pa,Pbとなっている。
【0013】
回動ミラー4,5は、それぞれサーボモータ(ステッピングモータ)41,51により回転駆動される。サーボモータ(ステッピングモータ)41,51には、角度検出器42,52が設けられ、ミラーの回転角度が検出される。検出されたミラーの回転角度は、サーボ回路43,53に入力される。サーボ回路43,53は、演算処理・制御回路20によりそれぞれ制御され、サーボモータ(ステッピングモータ)41,51をそれぞれ回転駆動する。
距離算出回路部6は、レーザ変位センサ2,3の検出信号を受けて検出された変位量からレーザ変位センサ2と測定点Aとの距離、レーザ変位センサ3と測定点Bとの距離を算出してデジタル値として演算処理・制御回路20に送出する。
なお、ここでの距離検出器は、レーザ変位センサ3と距離算出回路部6とレーザ変位センサ2と距離算出回路部6とによりそれぞれ構成されている。なお、距離算出回路部6の距離算出機能は、A/D変換したデジタル値を受けて演算処理・制御装置20によるプログラム処理にて実現されてもよい。
演算処理・制御装置20は、MPU21とメモリ22、インタフェース23、そしてキーボード等により構成され、これらがバスにより相互に接続されている。メモリ22には、レール変位量測定プログラム22a、測定三角形形成プログラム22b、測定光走査プログラム22c、レール位置誤差算出・レール検出プログラム22d等が記憶され、パラメータ領域22eが設けられている。
なお、パラメータ領域22eにはレール検出のときの判定基準値が記憶されている。
【0014】
演算処理・制御装置20は、距離算出回路部6から距離算出信号を受けて、それによりレール9が検出されているときに、MPU21がレール変位量測定プログラム22aを実行してレール9の位置移動に追従してレール9に対して測定三角形(後述)を形成して回動ミラー4と測定点Aとの距離DAと、回動ミラー5と測定点Bとの距離DBとをそれぞれ算出する。このとき形成される測定三角形は距離DA、距離DB、そして距離DCからなる三角形である。距離DAは、レーザ変位センサ2の測定基準点Paとレール頭頂面(測定点A)9aとの距離であり、距離DBは、レーザ変位センサ3の測定基準点Pbとレールの内軌側側面(測定点B)9bとの距離であり、距離DCは、測定基準点Paと測定基準点Pbとの間の距離である。
【0015】
この三角形の形成は、MPU21による測定三角形形成プログラム22bの実行により、上下方向の距離検出のレーザ変位センサ2の回動ミラー4と測定点Aとの距離DA、左右方向の距離検出のレーザ変位センサ3の回動ミラー5と測定点Bとの距離DB、そして回動ミラー4と回動ミラー5との距離DCとから余弦定理に従って演算して角度制御値を発生し、レール9の上下、左右の移動に応じてその角度制御値により回動ミラー4をレール9の上下、左右の移動に応じて回動させ、レーザ変位センサ2の投受光光路L1を測定点Aの移動に追従させ回動して次にミラー5を回動させて測定点Bの移動に追従させて投受光光路L2を測定点Bに一致させる。これを交互に繰り返すことで距離DA、距離DB、そして距離DCとレール9とにおいて距離DA、距離DBの変動が所定値以内に収まったところで測定三角形を形成し、これを維持する。こうして形成されるのが測定三角形Sであり、レーザ変位センサ2の測定光(投光光La)とレーザ変位センサ3の測定光(投光光Lb)とのレール9上の交点をPcとすると、三角形PaPbPcとして形成される。
【0016】
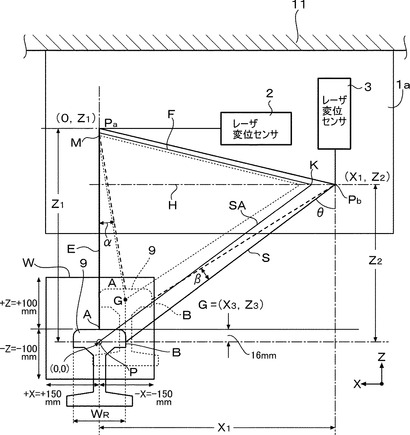
測定三角形Sにおいて測定されるレール9の位置は、通常、レールの頭頂面(測定点A)9aから16mmのところを基準点Pとしてこの基準点Pの位置をもってレールの位置と定めている。そのために、レール9の位置検出に際しては測定三角形Sの内側に基準点Pを頂点とするレールの位置を計算するための計算上の測定三角形SA(図2参照)が算出される。
計算上の測定三角形SAは、図2に示すように、レーザ変位センサ3の測定基準点Pbを通る水平線Hとレーザ変位センサ3の測定光に平行なレール9の基準点Pを通る線との交点をKとすると、交点Kを通り三角形PaPbPc(測定三角形S)の辺PaPbに平行な線Fとレーザ変位センサ2の投受光光路L1の測定光に当たる三角形PaPbPc(測定三角形S)の辺PaPcに平行なレール9の基準点Pを通る線E(図2ではこの線は投光光Laに重なっている。)との交点Mとが作る三角形PKMである。
【0017】
図2は、測定三角形からレールの位置を算出する算出原理の説明図である。
上下、左右方向のレール9の変位量は、レール9の基準点Pが基準位置にあるときの基準点Pの座標を原点XZ=(0,0)として測定三角形Sを形成してレール9の変位に応じて同様な測定三角形Sを形成し、さらに計算上の測定三角形SAを算出してレール9の位置座標を算出することにより測定することができる。
ただし、座標はXZ座標であり、X軸がレールを横断する左右方向、Z方向がレールの高さ方向、そしてY方向が車両の走行方向である。
検測車が揺れたとしても測定値に対して通常傾斜補正や左右補正がなされるので、検測車の揺動は考慮しないものとしてレール9の位置座標について以下説明する。
まず、基準位置でのレール9の原点(0,0)からこのときのレーザ変位センサ2の測定基準点Paの位置座標は、(0,Z1)となる。ただし、Z1は、レール9が基準位置にあるときの原点からみた測定基準点Paの高さである。これは、測定基準点Paから測定点Aまでの距離Da+16mmで算出される。レーザ変位センサ3の測定基準点Pbの位置座標は、(X1,Z2)となる。ただし、X1は、レール9が基準位置にあるときの原点からみた測定基準点PbのX方向の距離であり、Z2は、レール9が基準位置にあるときの原点からみた測定基準点Pbの高さである。
なお、前記の距離Da+16mmで算出するときの16mmは、特定路線の例であって、実際には路線に応じて任意の値が選択可能である。
【0018】
これらは、測定基準点Paから測定点Aまでの距離Dbとレール9の頭面の幅WRの半分=WR/2、そして水平線Hとからの回動ミラー5の回転角θとによりX1=Db・sinθ+WR/2とZ2=Db・cosθにより算出される。
次に、レール9は、図2に示されるように右上方に移動したとした場合には、この測定三角形Sの座標(0,Z1)と(X1,Z2)の座標、そして回動ミラー4の回転基準位置からの回転角αと回動ミラー5のの回転基準位置からの回転角βと、このときに形成される測定三角形Sの各内角と計算上の測定三角形SA(三角形PKM)と各内角との関係によりレール9の基準点Pの座標位置が算出される。
【0019】
そこで、レール変位量測定装置10の測定初期状態において、基準位置におかれたレール9に対して回動ミラー5の投受光光路L1の測定光(投光光La)がレール9の頭面から16mmの側面に当たるように回動ミラー5の角度が設定される。そして、そのときの回動ミラー4の測定光(投光光Lb)がレール9の頭頂面9aに当たるように回動ミラー4の角度が設定され、このときの回動ミラー4の回転角度が回転基準位置とされ、このときの座標位置(測定基準点Paの座標)が演算処理・制御装置20にそれぞれメモリ22のパラメータ領域22eに記録される。同様に、このときの回動ミラー5の回転角度が回転基準位置とされ、このときの回動ミラー5の座標位置(測定基準点Pbの座標)が演算処理・制御装置20にメモリ22に記録される。
なお、回動ミラー4の座標位置(測定三角形の一方の頂点位置)と回動ミラー5の座標位置(測定三角形の他方の頂点位置)と回転基準角度とは、検測車にレーザ変位センサ2,3が固定されたときに基準位置におかれたレール9を測定することでこのとき読込まれあるいは設計値としてあらかじめメモリ22のパラメータ領域22eに記録されていてもよい。
【0020】
測定点Aから投受光光路L1を延長し、測定点Bから投受光光路L2を延長したレール9の内部にある交点Pcにおいて、測定三角形Sが成立し、さらに、レールの基準位置Pとの間にも計算上の測定三角形SAが成立し、回動ミラー4と回動ミラー5との距離DCは一定であるので、演算処理・制御装置20の余弦定理を利用した追従制御として、例えば、レーザ変位センサ2により測定され距離DAが距離DBより大きく変化したときには、この変化に応じた距離DAと距離DCと、変化する以前の距離DBとから点Pcとの間の測定三角形Sにおいて回動ミラー5の角度βを算出することができる。
なお、前記の算出ではレール9の頭頂面9aから交点Pcまでの距離は変化しないものとする。
【0021】
実測された距離DBも変化しているときには、さらに、この角度βと変化した距離DBと、測定された距離DAと、距離DCとから回動ミラー4の角度αが算出されて、距離DBが再計算される。さらに算出された距離DBと測定された距離DBとが一致する方向に角度βが補正され、回動ミラー4の角度αが算出されて同様な処理が繰り返され、角度αと角度βとが測定された距離DBと測定された距離DAとに適合するように決定され、測定点Aと測定点Bを維持する測定三角形Sが形成される。
逆にレーザ変位センサ3により測定され距離DBが距離DAより大きく変化したときには、この変化に応じて距離DBと、距離DCと距離DAとから同様にして回動ミラー4の角度αを算出する。そして、前記と同様にして実測値との差を優先させて回動ミラー5の角度βと回動ミラー4の角度αとを算出することで、レール9の測定点A,Bの変動に対して追従させる回動ミラー4,5の角度α,βを算出して、それぞれの測定光がレール9のレールの頭頂面9aと頭面の中央の測定点Aと頭頂面9aから16mmの側面の測定点Bにそれぞれ当たるように角度α,βと測定距離Da,Dbと距離DCに基づいて測定点Aと測定点Bを照射する適合条件になるように測定三角形Sを形成する追込み制御が測定三角形の内角と加えた余弦定理を利用してなされる。
【0022】
図2に戻り、基準位置におかれたレール9に対して、図2に示すように、レール9の位置が右上に変位してその位置のレール9に対して追込み制御により測定三角形Sが形成されると、測定三角形Sの内側にレール9の基準位置Pを頂点とする測定三角形Sの3辺に平行な辺を持つ点線で示した計算上の測定三角形SAが算出される。
この計算上の測定三角形SAとこの三角形の内角の角度と三角形の辺の長さ、そして原点(0,0)に対する測定基準点Paの位置座標(0,Z1)、測定基準点Pbの位置座標(X1,Z2)とから変位したレール9の基準点Pの位置座標G=(X3,Z3)を算出することができる。
なお、計算上の測定三角形SAの各辺の長さは、測定距離Da,Dbと変位センサ間の距離DCと角度α,β、そして基準点Pの深さ16mmとの関係から算出される。
レール9の基準点Pの位置座標G=(X3,Z3)の算出については、先に挙げた特開2001−41705号公報に記載されているのでここでは割愛する。
【0023】
ところで、基準位置におかれたレール9を測定して初期状態で形成した測定三角形をレール9の位置変動に追従させてレール9の位置を測定する場合に、レール9が変位する範囲は、現在のところ図2に示す変位枠Wの範囲にある。この変位枠Wの範囲は、
−150mm<=X<=+150mmでかつ−100mm<=Z<=+100mmの範囲である。
したがって、レール8の測定点Aを照射するレーザ変位センサ2の投光光Laの角度とレール8の測定点Bを照射するレーザ変位センサ3の投光光Lbの角度とは変位枠Wの範囲に入る一定の角度範囲にある。そして、レール9が基準位置にある初期状態で形成した測定三角形Sを基準として以後のレール9の変位に対応させて測定三角形Sを形成していくとすると、いずれか一方の角度αあるいはβが決まると測定距離Daあるいは測定距離Dbとからいずれか他方の角度βあるいはαが決まり、前記した測定三角形Sを形成する追い込み処理により変位したレール9の位置に対して新しい測定三角形Sを形成することが可能になる。なお、これらのことは、右側のレールについても同様である。
レール変位量測定装置10は、この変位枠Wの範囲においてレール9の検出を行うことになるが、変位枠Wにおいてレール9に対して形成される測定三角形Sと脱線防止用ガードレール7に対して形成される測定三角形Sとは図3に示すようにその図形状が異なっている。
【0024】
通常は、レール9に対して追従制御をしているので、レールと脱線防止用ガードレール等とは区別されて脱線防止用ガードレール等が測定対象として検出されることはないが、車両が傾斜するカーブ等でレールの位置が大きく変化してレールに対する追従が外れたときにはレールを検出しなければならない。そこで、従来では、レールと脱線防止用ガードレール等との誤認が発生する。
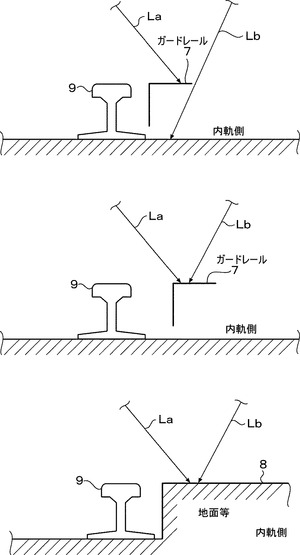
図3は、脱線防止用ガードレール等に対して形成される測定三角形についての説明図である。
前記したように、レール9の測定点Aを照射するレーザ変位センサ2の投光光Laの角度とレール9の測定点Bを照射するレーザ変位センサ3の投光光Lbの角度とは変位枠Wの範囲に入る一定の角度範囲にあって、前記した追い込み処理により測定三角形Sが形成される関係にある。
【0025】
上下方向の距離検出のレーザ変位センサ2により軌道内を走査して脱線防止用ガードレール7をレールとして検出したときでも、図3(a)に示すように、脱線防止用ガードレール7の右端に位置しているときには、脱線防止用ガードレール7との間でレーザ変位センサ2の測定光(投光光La)とレーザ変位センサ3の測定光(投光光Lb)とによる正規の測定三角形Sが形成されないことになり、誤検出の問題は生じない。このような場合には、レーザ変位センサ3の測定距離がレーザ変位センサ2の測地距離に対して非常に長くなるからであり、測定対象の誤認として処理をすることができる。
逆に上下方向の距離検出のレーザ変位センサ2が脱線防止用ガードレール7の左端に位置した場合も同様に脱線防止用ガードレール7との間で正規の測定三角形Sが形成されないので前記と同様に問題は生じない。このような場合には、レーザ変位センサ3の測定距離がレーザ変位センサ2の測地距離に対して予測以上に短くなるからであり、これも測定対象の誤認として処理をすることができる。
問題は、図3(b)に示すように、脱線防止用ガードレール7の頭面にレーザ変位センサ2の測定光(投光光La)とレーザ変位センサ3の測定光(投光光Lb)とが照射されて測定三角形Sが形成されたときである。
このようなことは、図3(c)に示すように、踏切などの地面8についても発生する。
【0026】
図4は、頭面がレールに比べて比較的幅のある平面形状の物体に対して形成される測定三角形についての説明図である。
レール9の変位を測定する各測定三角形Sは、脱線防止用ガードレール7等では、頭面がレール9よりも長い幅の平板であるので、図示するように、上下方向のレーザ変位センサ2の測定光(投光光La)は平面上に設定される。これに対して左右方向の距離検出のレーザ変位センサ3の測定光(投光光Lb)は、レール9の頭頂面9aから16mm下の側面となる方向から照射され、測定三角形Sが形成されている。
しかし、脱線防止用ガードレール7等ではこの照射光が実際には測定点Bに相当する側面に当っていない。その結果、脱線防止用ガードレール7等ではレーザ変位センサ3の測定光による測定距離が本来よりも距離dだけ短くなる誤差を生じる。
この誤差dは、現在のところ変位枠Wの中の変位において、左側レールにおいて変位枠Wの左上側角にレール9が位置したときなどに最大で30mm以上の誤差があり、左側レールにおいて変位枠Wの右下側角にレール9が位置したときに誤差は最小となって、それでも19mm程度はある。
【0027】
その結果、この測定三角形Sによりレールの位置(基準点P)として算出される座標XZは、本来のレール9の基準点Pとして測定されるべき位置とにずれが生じる。このずれは、左右方向のレーザ変位センサ2の測定光により測定される基準点Pあるいはレーザ変位センサ3の測定光により測定される基準点Pとの間の位置ずれとして表れてくる。
シャーシ11に取付けられたレール変位検出器1の上下方向の距離検出のレーザ変位センサ2の測定基準点Paは、通常、基準位置(原点)におかれたレール9の頭頂面9aに対して350mm程度の位置であり、左右方向の距離検出のレーザ変位センサ3の測定基準点Pbは、通常、基準位置(原点)におかれたレール9の頭頂面9aに対して260mm程度の位置にある。そして、距離検出のレーザ変位センサ2の測定基準点Paとレーザ変位センサ3の測定基準点PbのX方向の距離は、430mm程度である。
【0028】
このような条件下で測定三角形Sを形成して測定されるレール9の位置座標と、上下方向の距離検出のレーザ変位センサ2のみで測定されるレール9の位置座標の測定値との間で発生する測定誤差(位置ずれ量)は、測定対象が脱線防止用ガードレール7になっているときには右方向(X方向)においては測定されるレール基準点Pの位置ずれ量kは、k>±3.3mmであり、上下方向(Z方向)においては、k>±1.5mmである。
言い換えれば、レール9の検出については、測定されるレール基準点Pの位置ずれ量kが変位枠Wの範囲における位置座標の誤差として−3.3mm<=X<=+3.3mmでかつ−1.5mm<=Z<=+1.5mmの範囲にあるとすることができる。
なお、左右方向の距離検出のレーザ変位センサ3のみで測定されるレール9の位置座標の測定値との間で発生する測定誤差は、対象が脱線防止用ガードレール7では左右方向(X方向)において測定されるレール基準点Pの位置ずれ量kは、k>±2.0mmであり、上下方向(Z方向)においては、k>±0.5mmであり、左右方向と上下方向の距離検出のレーザ変位センサ2の誤差の場合よりも小さい。
【0029】
そこで、この誤差値をレール検出座標の位置ずれ量kとしてレール9と脱線防止用ガードレール7等とを区別することができる。
シャーシ11に取付けられたレール変位検出器1のレール9に対する位置は、実際上は、前記のような条件より多少前後する数値の場合がある。そこで、次のレール検出処理として、ここでは、レール検出座標の位置ずれ量kとして、−2mm<=X<=+2mmでかつ−1mm<=Z<=+1mmの範囲にあるものをもって行うことにする。このような条件に設定することで、シャーシ11に取付けられたレール変位検出器1の位置が25%程度変動しても問題なく、脱線防止用ガードレール7等を排除してレールだけを検出することが可能である。
【0030】
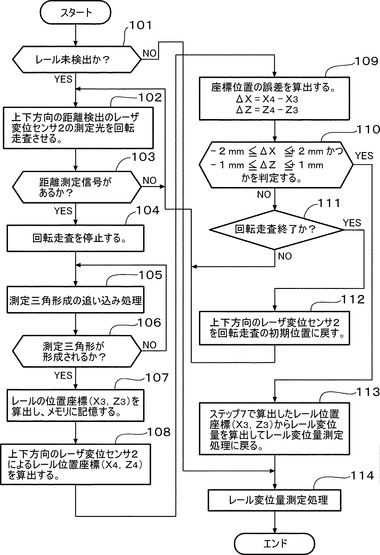
図5は、レール変位量測定におけるレール検出座標の位置ずれ量kによるレール検出処理のフローチャートである。
MPU21によるレール変位量測定プログラム22aの実行による前記のような追従をさせても軌道上にあるカーブ等では、レール9の位置は大きく変動してレール9が検出できなくなることがある。
このような時には、レール未検出か否かの判定により(ステップ101)、レール9からの反射光がなくあるいは規定値以下となって、レール9を見失い、距離算出回路部6から正規の状態での距離算出信号が得られなくなると、MPU21が測定光走査プログラム22cをコールして実行する。
なお、正規の状態での距離算出信号が得られると、ステップ101でNOになり、レール変位量測定プログラム22aにリターンしてステップ114のレール変位量測定を続行する。
【0031】
一方、ステップ101でYESとなると、レール未検出処理スタートで測定光走査プログラム22cがMPU21に実行され、回動ミラー4の角度αを軌道内内側に振って上下方向の距離検出のレーザ変位センサ2の測定光(投光光La)を軌道内内側の初期位置から外側へとレール横断方向において回転走査をさせて(ステップ102)、距離測定に対応する反射光が測定光として得られているかを距離測定信号があるか否かにより判定し(ステップ103)、ここでNOとなると、ステップ102へと戻り、さらに外側へと測定光(投光光La)を回転走査をさせる。
ここで、YESのときには回転走査を停止する(ステップ104)。
そして、MPU21が測定三角形形成プログラム22bをコールして実行し、追い込み処理を行い(ステップ105)、測定三角形Sが形成されたか否かを判定する(ステップ106)。
【0032】
ステップ106でNOのときには、ステップ105へと戻り、回動ミラー4の角度αを変化させて回動ミラー5の角度βをそれに合わせて振って、測定点Aの測定距離DAと測定点Aの測定距離DBを得て測定三角形Sを形成する追い込み処理を続ける。
ステップ106でYESと判定されたときには、レール9の位置座標(X3,Z3)を算出してメモリに記憶する(ステップ107)、さらに、上下方向の距離検出のレーザ変位センサ2だけによるレール位置座標(X4,Z4)を算出する(ステップ108)。
次に座標値の誤差ΔX=X4−X3,ΔZ=Z4−Z3を算出して(ステップ109)、−2mm<=ΔX<=+2mmでかつ−1mm<=ΔZ<=+1mmの範囲にある否かの判定をする(ステップ110)。
この判定の結果、NOであるときには、回転走査終了かを判定して(ステップ111)、NOのときには、ステップ102へと戻り、停止した回転走査を再開して軌道内で内側から外側へとさらに振って、ステップ102以降の処理を実行する。
ステップ111でYESのときには、上下方向の距離検出のレーザ変位センサ2の測定光を軌道内の内側の回転走査の初期位置に戻して(ステップ112)、ステップ102へと戻り、再び回動ミラー4の角度αを軌道内内側に振って内側から外側へと測定光の回転走査を再開する。
ステップ110でYESのときには、ステップ107で算出したレール位置座標(X3,Z3)からレール変位量を算出してレール変位量測定プログラム22aにリターンしてレール変位量測定処理に戻る(ステップ113)。そしてレール変位量測定処理を続行する(ステップ114)。
なお、この実施例では、ステップ102において軌道内内側の初期位置から外側へとレール横断方向において回転走査をしているが、これは逆に、初期位置をレールの外側として外側から内側に回転走査するようにしてもよい。
【産業上の利用可能性】
【0033】
以上説明してきたが、実施例では、上下方向の距離検出のレーザ変位センサ2により検出されるレールの座標値を基準としてステップ109において座標値の誤差ΔX,ΔZを算出しているが、この発明は、図3の説明から理解できるように、左右方向の距離検出のレーザ変位センサ3により検出されるレールの座標値を基準として座標値の誤差ΔX,ΔZを算出を算出して所定値と比較してもよい。
また、実施例では、レールからの反射光がなくあるいは規定値以下となってレール未検状態となる場合のガードレールについての誤検出を中心に説明しているが、この発明では、常時、レール判定をしながらレール変位量の測定をすることで、レールに沿って設けられた踏切の地面などの頭面がレールに比べて比較的幅のある平面形状の物体に対する誤認も防止することができる。
【符号の説明】
【0034】
1…レール変位検出器、1a…測定基板、
2,3…レーザ変位センサ、4,5…回転ミラー、
6…距離算出回路部、7…脱線防止用ガードレール、
8…踏切などの地面、9…レール、9a…頭頂面、
10…レール変位量測定装置、11…シャーシ(車体)、
20…演算処理・制御装置、21…MPU、
22…メモリ、22a…レール変位量測定プログラム、
22b…測定三角形形成プログラム、
22c…測定光走査プログラム、
22d…レール位置誤差算出・レール検出プログラム、
22e…パラメータ領域、23…インタフェース。
【技術分野】
【0001】
この発明は、レール変位量測定におけるレール検出方法およびレール変位量測定装置に関し、詳しくは、既知の距離にある2点に配置された距離センサとレールとの間で測定三角形を形成して2点からレールに測定光を照射してレールの位置を測定するレール変位量測定において、脱線防止用ガードレール等の軌道内にある頭面がレールに比べて比較的幅のある平面形状の物体をレールと誤検出することを防止することができるようなレール検出方法およびレール変位量測定装置に関する。
【背景技術】
【0002】
列車運行の安全を確保するために、軌道検測車は、レール変位量測定装置を搭載し、これによりレール間が基準ゲージの軌道間隔あるいはその許容範囲の間隔にあるか否かを定期的に測定している。
従来のレール変位量測定装置として、既知の距離にある2点に配置された距離センサ(レーザ変位センサ)とレールとの間で測定三角形を形成して2点の距離センサ(レーザ変位センサ)から測定光をレールに照射し、レールの位置を測定するものがある。
これは、レールとレーザ変位センサとの間に回動ミラーを介在させてレール上の特定の測定点の変動に応じて回動ミラーを追従回動させてレール上の測定点を追従制御することで測定三角形を維持しながらレールの測定点と測定基準点との距離(位置座標)を検出してレール変位量を測定するものである。
この測定技術は、車体が上下左右に変動する走行車輪のばねより上のシャーシ等に変位検出器(2点に配置されたレーザ変位センサ)を左右のレールに対応してそれぞれ設けるもので、レールの左右の変位量を測定三角形の角度と距離とから三角法を利用して演算処理において高精度に測定するができる。しかも、距離検出器を小型化することを可能にしている(特許文献1,2)。
【0003】
ところで、検測車が走行する軌道上には脱線防止用ガードレールがレールに沿って所定の間隔を置いて軌道の内側に敷設されている。この脱線防止用ガードレールは、走行車輪がレール横断方向に一定以上移動することを阻止することにより脱線を防止する。
レールと脱線防止用ガードレールとの間隔は、通常、80mm程度はあり、脱線防止用ガードレールは、レールより10mm〜25mm高く設置されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2001−41705号公報
【特許文献2】特開2003−254740号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
三角法を利用して演算処理によりレールの位置(変位量)を測定する従来のレール変位量測定装置にあっては、分岐やレール継目等でレールに対する追従が外れることがある。このようなときにはレールが検出されなくなるのでレール検出が必要になる。このようなときにレール検出をすると、脱線防止用ガードレールをレールと誤認して脱線防止用ガードレールに追従してレール変位量測定が行われてしまう問題がある。
これと同様に、踏切などでも脱線防止用ガードレールと同様に地面がレールに沿って形成されている。この踏切の地面も車両の傾斜などによりレールと誤認される対象になる。
すなわち、三角法を利用する前記した従来のレール変位量測定では、レール近傍にあってレールと同様な上部が平面状の物体をレールと誤検出する傾向がる。
【0006】
したがって、この発明の目的は、このような従来技術の問題点を解決するものであって、レール近傍にあって頭面がレールに比べて比較的幅のある平面形状の物体をレールと誤検出することを防止することができるレール変位量測定装置におけるレール検出方法を提供することにある。
この発明の他の目的は、レール追従制御のためのレール検出のデータ処理を行う装置の処理ロードを低減してレール変位量の測定精度を向上させることができるレール変位量測定装置を提供することにある。
【課題を解決するための手段】
【0007】
このような目的を達成するためのこの発明のレール変位量測定におけるレール検出方法およびレール変位量測定装置の特徴は、既知の距離にある2点に配置された第1および第2の距離検出器とレールとの間で測定三角形を形成して第1および第2の距離検出器から測定光をレールに照射してレールの位置を測定するレール変位量測定装置におけるレール検出方法であって、
第1の距離検出器の測定光をレールの頭面に照射し、第2の距離検出器の測定光をレール頭部の内軌側側面に照射して測定三角形を形成してこの測定三角形において測定されるレールの位置とこの測定三角形において第1の距離検出器および第2の距離検出器のいずれかにより測定されるレールの位置との位置誤差をレール変位量測定装置において算出して、この位置誤差が所定値の範囲にあるときにレール変位量測定装置が測定対象をレールとするものである。
【発明の効果】
【0008】
レール位置の近傍に設けられる脱線防止用ガードレールを始めとして、踏切の地面等の頭面がレールに比べて比較的幅のある平面形状の物体は、検測車の車体が傾斜することなどにより、レールの位置が変動すると、同時に軌道内にある物体もレールの位置に併せて同様の方向にシフトしてレール変位量測定装置に検出されることがある。
レールの形状は、頭面が狭い平面で側面方向に湾曲した特殊な頭部形状をしている。その上、レールと距離検出器との間で形成される測定三角形の測定光の1つが頭部側面を照射することから測定対象との間に形成される測定三角形は、脱線防止用ガードレール等の頭面が比較的幅のある平面形状の物体とは異なってくる。
発明者等は、この測定三角形の形成形態の相違が測定三角形により測定されるレールの位置と距離検出器の1つで測定されるレールの位置との位置誤差として表れてくることに着目した。
そこで、この発明は、この位置誤差を基準としてレールと軌道内にある他の物体とを区分けして測定対象がレールであるか否かの判定をする。
【0009】
すなわち、この発明は、測定三角形が形成されたときのこの測定三角形において測定されるレールの位置とこの測定三角形において第1の距離検出器あるいは第2の距離検出器のいずれかにより測定されるレールの位置との位置誤差を算出して、この位置誤差が所定値の範囲にあるときに測定対象をレールとして検出する。
これにより、車両が傾斜するカーブ等でレールの位置が大きく変化してレールに対する追従が外れてレールが検出されないときのレール検出においても脱線防止用ガードレール等の軌道内にある物体をレールと誤認することが防止され、容易にレールだけを検出することができる。
しかも、この場合のレール検出処理は、位置誤差の算出だけで済むので、データ処理を行う装置の処理ロードは小さいものとなる。したがって、後述するように、レールからの反射光がなくあるいは規定値以下となってレール未検状態となる場合に限らずに、この発明では、常時、レール判定をしながらレール変位量の測定をすることで、レールに沿って設けられた踏切の地面などの頭面がレールに比べて比較的幅のある平面形状の物体に対する誤認も防止することができる。
その結果、追従制御のためのレール検出の処理ロードが低減でき、レール近傍に設けられるレール以外の検出を防止することができ、レールの追従を外れて軌道内にある物体をレールと誤検出して変位量測定することがほとんどなくなる。
【図面の簡単な説明】
【0010】
【図1】図1は、この発明を適用した一実施例の軌道検測車に搭載されたレール変位量測定装置の説明図である。
【図2】図2は、測定三角形からレールの位置を算出する算出原理の説明図である。
【図3】図3は、脱線防止用ガードレール等に対して形成される測定三角形についての説明図である。
【図4】図4は、頭面がレールに比べて比較的幅のある平面形状の物体に対して形成される測定三角形についての説明図である。
【図5】図5は、レール変位量測定におけるレール検出処理のフローチャートである。
【発明を実施するための形態】
【0011】
図1は、軌道検測車に搭載されたレール変位量測定装置の説明図であって、この図1において、10は、レール変位量測定装置である。1は、左右のレールに対応してそれぞれに設けられたレール変位検出器であり、図では、左側のレール9に対応するレール変位検出器1のみを示してある。右側のレールについては、単にレール変位検出器1のレーザ変位センサが軌道中心に対して対称に配置されるだけであり、その構造上においては本質的な相違はないので、左側のレール9について以下説明し、右側のレールについては割愛する。
レール変位検出器1の測定基板1aには上下方向の距離検出のレーザ変位センサ2と左右方向の距離検出のレーザ変位センサ3とがそれぞれ設けられている。
【0012】
レーザ変位センサ2は、自己の測定基準点Paとレール9の頭頂面(頭面の中央)9a(測定点A)との間の変位量(距離)を検出する検出信号を発生する。レーザ変位センサ3は、自己の測定基準点Pbとレール9の内軌側側面(軌道におけるレール内側側面)9b(測定点B)との間の変位量(距離)を検出する検出信号を発生する。
Laは、レーザ変位センサ2の投光光であり、Raは、レーザ変位センサ2の受光光である。Lbは、レーザ変位センサ3の投光光であり、Rbは、レーザ変位センサ3の受光光である。
測定基板1aは、検測車の車体動揺の影響を受けるばね上のシャーシ(車体)11に取付けられ、測定基板1aには回動ミラー4がレーザ変位センサ2の投受光光路L1に介在するように設けられ、また、回動ミラー5がレーザ変位センサ3の投受光光路L2に同様に設けられている。ここでは、回動ミラー4,5のそれぞれの測定光の反射位置がそれぞれの測定基準点Pa,Pbとなっている。
【0013】
回動ミラー4,5は、それぞれサーボモータ(ステッピングモータ)41,51により回転駆動される。サーボモータ(ステッピングモータ)41,51には、角度検出器42,52が設けられ、ミラーの回転角度が検出される。検出されたミラーの回転角度は、サーボ回路43,53に入力される。サーボ回路43,53は、演算処理・制御回路20によりそれぞれ制御され、サーボモータ(ステッピングモータ)41,51をそれぞれ回転駆動する。
距離算出回路部6は、レーザ変位センサ2,3の検出信号を受けて検出された変位量からレーザ変位センサ2と測定点Aとの距離、レーザ変位センサ3と測定点Bとの距離を算出してデジタル値として演算処理・制御回路20に送出する。
なお、ここでの距離検出器は、レーザ変位センサ3と距離算出回路部6とレーザ変位センサ2と距離算出回路部6とによりそれぞれ構成されている。なお、距離算出回路部6の距離算出機能は、A/D変換したデジタル値を受けて演算処理・制御装置20によるプログラム処理にて実現されてもよい。
演算処理・制御装置20は、MPU21とメモリ22、インタフェース23、そしてキーボード等により構成され、これらがバスにより相互に接続されている。メモリ22には、レール変位量測定プログラム22a、測定三角形形成プログラム22b、測定光走査プログラム22c、レール位置誤差算出・レール検出プログラム22d等が記憶され、パラメータ領域22eが設けられている。
なお、パラメータ領域22eにはレール検出のときの判定基準値が記憶されている。
【0014】
演算処理・制御装置20は、距離算出回路部6から距離算出信号を受けて、それによりレール9が検出されているときに、MPU21がレール変位量測定プログラム22aを実行してレール9の位置移動に追従してレール9に対して測定三角形(後述)を形成して回動ミラー4と測定点Aとの距離DAと、回動ミラー5と測定点Bとの距離DBとをそれぞれ算出する。このとき形成される測定三角形は距離DA、距離DB、そして距離DCからなる三角形である。距離DAは、レーザ変位センサ2の測定基準点Paとレール頭頂面(測定点A)9aとの距離であり、距離DBは、レーザ変位センサ3の測定基準点Pbとレールの内軌側側面(測定点B)9bとの距離であり、距離DCは、測定基準点Paと測定基準点Pbとの間の距離である。
【0015】
この三角形の形成は、MPU21による測定三角形形成プログラム22bの実行により、上下方向の距離検出のレーザ変位センサ2の回動ミラー4と測定点Aとの距離DA、左右方向の距離検出のレーザ変位センサ3の回動ミラー5と測定点Bとの距離DB、そして回動ミラー4と回動ミラー5との距離DCとから余弦定理に従って演算して角度制御値を発生し、レール9の上下、左右の移動に応じてその角度制御値により回動ミラー4をレール9の上下、左右の移動に応じて回動させ、レーザ変位センサ2の投受光光路L1を測定点Aの移動に追従させ回動して次にミラー5を回動させて測定点Bの移動に追従させて投受光光路L2を測定点Bに一致させる。これを交互に繰り返すことで距離DA、距離DB、そして距離DCとレール9とにおいて距離DA、距離DBの変動が所定値以内に収まったところで測定三角形を形成し、これを維持する。こうして形成されるのが測定三角形Sであり、レーザ変位センサ2の測定光(投光光La)とレーザ変位センサ3の測定光(投光光Lb)とのレール9上の交点をPcとすると、三角形PaPbPcとして形成される。
【0016】
測定三角形Sにおいて測定されるレール9の位置は、通常、レールの頭頂面(測定点A)9aから16mmのところを基準点Pとしてこの基準点Pの位置をもってレールの位置と定めている。そのために、レール9の位置検出に際しては測定三角形Sの内側に基準点Pを頂点とするレールの位置を計算するための計算上の測定三角形SA(図2参照)が算出される。
計算上の測定三角形SAは、図2に示すように、レーザ変位センサ3の測定基準点Pbを通る水平線Hとレーザ変位センサ3の測定光に平行なレール9の基準点Pを通る線との交点をKとすると、交点Kを通り三角形PaPbPc(測定三角形S)の辺PaPbに平行な線Fとレーザ変位センサ2の投受光光路L1の測定光に当たる三角形PaPbPc(測定三角形S)の辺PaPcに平行なレール9の基準点Pを通る線E(図2ではこの線は投光光Laに重なっている。)との交点Mとが作る三角形PKMである。
【0017】
図2は、測定三角形からレールの位置を算出する算出原理の説明図である。
上下、左右方向のレール9の変位量は、レール9の基準点Pが基準位置にあるときの基準点Pの座標を原点XZ=(0,0)として測定三角形Sを形成してレール9の変位に応じて同様な測定三角形Sを形成し、さらに計算上の測定三角形SAを算出してレール9の位置座標を算出することにより測定することができる。
ただし、座標はXZ座標であり、X軸がレールを横断する左右方向、Z方向がレールの高さ方向、そしてY方向が車両の走行方向である。
検測車が揺れたとしても測定値に対して通常傾斜補正や左右補正がなされるので、検測車の揺動は考慮しないものとしてレール9の位置座標について以下説明する。
まず、基準位置でのレール9の原点(0,0)からこのときのレーザ変位センサ2の測定基準点Paの位置座標は、(0,Z1)となる。ただし、Z1は、レール9が基準位置にあるときの原点からみた測定基準点Paの高さである。これは、測定基準点Paから測定点Aまでの距離Da+16mmで算出される。レーザ変位センサ3の測定基準点Pbの位置座標は、(X1,Z2)となる。ただし、X1は、レール9が基準位置にあるときの原点からみた測定基準点PbのX方向の距離であり、Z2は、レール9が基準位置にあるときの原点からみた測定基準点Pbの高さである。
なお、前記の距離Da+16mmで算出するときの16mmは、特定路線の例であって、実際には路線に応じて任意の値が選択可能である。
【0018】
これらは、測定基準点Paから測定点Aまでの距離Dbとレール9の頭面の幅WRの半分=WR/2、そして水平線Hとからの回動ミラー5の回転角θとによりX1=Db・sinθ+WR/2とZ2=Db・cosθにより算出される。
次に、レール9は、図2に示されるように右上方に移動したとした場合には、この測定三角形Sの座標(0,Z1)と(X1,Z2)の座標、そして回動ミラー4の回転基準位置からの回転角αと回動ミラー5のの回転基準位置からの回転角βと、このときに形成される測定三角形Sの各内角と計算上の測定三角形SA(三角形PKM)と各内角との関係によりレール9の基準点Pの座標位置が算出される。
【0019】
そこで、レール変位量測定装置10の測定初期状態において、基準位置におかれたレール9に対して回動ミラー5の投受光光路L1の測定光(投光光La)がレール9の頭面から16mmの側面に当たるように回動ミラー5の角度が設定される。そして、そのときの回動ミラー4の測定光(投光光Lb)がレール9の頭頂面9aに当たるように回動ミラー4の角度が設定され、このときの回動ミラー4の回転角度が回転基準位置とされ、このときの座標位置(測定基準点Paの座標)が演算処理・制御装置20にそれぞれメモリ22のパラメータ領域22eに記録される。同様に、このときの回動ミラー5の回転角度が回転基準位置とされ、このときの回動ミラー5の座標位置(測定基準点Pbの座標)が演算処理・制御装置20にメモリ22に記録される。
なお、回動ミラー4の座標位置(測定三角形の一方の頂点位置)と回動ミラー5の座標位置(測定三角形の他方の頂点位置)と回転基準角度とは、検測車にレーザ変位センサ2,3が固定されたときに基準位置におかれたレール9を測定することでこのとき読込まれあるいは設計値としてあらかじめメモリ22のパラメータ領域22eに記録されていてもよい。
【0020】
測定点Aから投受光光路L1を延長し、測定点Bから投受光光路L2を延長したレール9の内部にある交点Pcにおいて、測定三角形Sが成立し、さらに、レールの基準位置Pとの間にも計算上の測定三角形SAが成立し、回動ミラー4と回動ミラー5との距離DCは一定であるので、演算処理・制御装置20の余弦定理を利用した追従制御として、例えば、レーザ変位センサ2により測定され距離DAが距離DBより大きく変化したときには、この変化に応じた距離DAと距離DCと、変化する以前の距離DBとから点Pcとの間の測定三角形Sにおいて回動ミラー5の角度βを算出することができる。
なお、前記の算出ではレール9の頭頂面9aから交点Pcまでの距離は変化しないものとする。
【0021】
実測された距離DBも変化しているときには、さらに、この角度βと変化した距離DBと、測定された距離DAと、距離DCとから回動ミラー4の角度αが算出されて、距離DBが再計算される。さらに算出された距離DBと測定された距離DBとが一致する方向に角度βが補正され、回動ミラー4の角度αが算出されて同様な処理が繰り返され、角度αと角度βとが測定された距離DBと測定された距離DAとに適合するように決定され、測定点Aと測定点Bを維持する測定三角形Sが形成される。
逆にレーザ変位センサ3により測定され距離DBが距離DAより大きく変化したときには、この変化に応じて距離DBと、距離DCと距離DAとから同様にして回動ミラー4の角度αを算出する。そして、前記と同様にして実測値との差を優先させて回動ミラー5の角度βと回動ミラー4の角度αとを算出することで、レール9の測定点A,Bの変動に対して追従させる回動ミラー4,5の角度α,βを算出して、それぞれの測定光がレール9のレールの頭頂面9aと頭面の中央の測定点Aと頭頂面9aから16mmの側面の測定点Bにそれぞれ当たるように角度α,βと測定距離Da,Dbと距離DCに基づいて測定点Aと測定点Bを照射する適合条件になるように測定三角形Sを形成する追込み制御が測定三角形の内角と加えた余弦定理を利用してなされる。
【0022】
図2に戻り、基準位置におかれたレール9に対して、図2に示すように、レール9の位置が右上に変位してその位置のレール9に対して追込み制御により測定三角形Sが形成されると、測定三角形Sの内側にレール9の基準位置Pを頂点とする測定三角形Sの3辺に平行な辺を持つ点線で示した計算上の測定三角形SAが算出される。
この計算上の測定三角形SAとこの三角形の内角の角度と三角形の辺の長さ、そして原点(0,0)に対する測定基準点Paの位置座標(0,Z1)、測定基準点Pbの位置座標(X1,Z2)とから変位したレール9の基準点Pの位置座標G=(X3,Z3)を算出することができる。
なお、計算上の測定三角形SAの各辺の長さは、測定距離Da,Dbと変位センサ間の距離DCと角度α,β、そして基準点Pの深さ16mmとの関係から算出される。
レール9の基準点Pの位置座標G=(X3,Z3)の算出については、先に挙げた特開2001−41705号公報に記載されているのでここでは割愛する。
【0023】
ところで、基準位置におかれたレール9を測定して初期状態で形成した測定三角形をレール9の位置変動に追従させてレール9の位置を測定する場合に、レール9が変位する範囲は、現在のところ図2に示す変位枠Wの範囲にある。この変位枠Wの範囲は、
−150mm<=X<=+150mmでかつ−100mm<=Z<=+100mmの範囲である。
したがって、レール8の測定点Aを照射するレーザ変位センサ2の投光光Laの角度とレール8の測定点Bを照射するレーザ変位センサ3の投光光Lbの角度とは変位枠Wの範囲に入る一定の角度範囲にある。そして、レール9が基準位置にある初期状態で形成した測定三角形Sを基準として以後のレール9の変位に対応させて測定三角形Sを形成していくとすると、いずれか一方の角度αあるいはβが決まると測定距離Daあるいは測定距離Dbとからいずれか他方の角度βあるいはαが決まり、前記した測定三角形Sを形成する追い込み処理により変位したレール9の位置に対して新しい測定三角形Sを形成することが可能になる。なお、これらのことは、右側のレールについても同様である。
レール変位量測定装置10は、この変位枠Wの範囲においてレール9の検出を行うことになるが、変位枠Wにおいてレール9に対して形成される測定三角形Sと脱線防止用ガードレール7に対して形成される測定三角形Sとは図3に示すようにその図形状が異なっている。
【0024】
通常は、レール9に対して追従制御をしているので、レールと脱線防止用ガードレール等とは区別されて脱線防止用ガードレール等が測定対象として検出されることはないが、車両が傾斜するカーブ等でレールの位置が大きく変化してレールに対する追従が外れたときにはレールを検出しなければならない。そこで、従来では、レールと脱線防止用ガードレール等との誤認が発生する。
図3は、脱線防止用ガードレール等に対して形成される測定三角形についての説明図である。
前記したように、レール9の測定点Aを照射するレーザ変位センサ2の投光光Laの角度とレール9の測定点Bを照射するレーザ変位センサ3の投光光Lbの角度とは変位枠Wの範囲に入る一定の角度範囲にあって、前記した追い込み処理により測定三角形Sが形成される関係にある。
【0025】
上下方向の距離検出のレーザ変位センサ2により軌道内を走査して脱線防止用ガードレール7をレールとして検出したときでも、図3(a)に示すように、脱線防止用ガードレール7の右端に位置しているときには、脱線防止用ガードレール7との間でレーザ変位センサ2の測定光(投光光La)とレーザ変位センサ3の測定光(投光光Lb)とによる正規の測定三角形Sが形成されないことになり、誤検出の問題は生じない。このような場合には、レーザ変位センサ3の測定距離がレーザ変位センサ2の測地距離に対して非常に長くなるからであり、測定対象の誤認として処理をすることができる。
逆に上下方向の距離検出のレーザ変位センサ2が脱線防止用ガードレール7の左端に位置した場合も同様に脱線防止用ガードレール7との間で正規の測定三角形Sが形成されないので前記と同様に問題は生じない。このような場合には、レーザ変位センサ3の測定距離がレーザ変位センサ2の測地距離に対して予測以上に短くなるからであり、これも測定対象の誤認として処理をすることができる。
問題は、図3(b)に示すように、脱線防止用ガードレール7の頭面にレーザ変位センサ2の測定光(投光光La)とレーザ変位センサ3の測定光(投光光Lb)とが照射されて測定三角形Sが形成されたときである。
このようなことは、図3(c)に示すように、踏切などの地面8についても発生する。
【0026】
図4は、頭面がレールに比べて比較的幅のある平面形状の物体に対して形成される測定三角形についての説明図である。
レール9の変位を測定する各測定三角形Sは、脱線防止用ガードレール7等では、頭面がレール9よりも長い幅の平板であるので、図示するように、上下方向のレーザ変位センサ2の測定光(投光光La)は平面上に設定される。これに対して左右方向の距離検出のレーザ変位センサ3の測定光(投光光Lb)は、レール9の頭頂面9aから16mm下の側面となる方向から照射され、測定三角形Sが形成されている。
しかし、脱線防止用ガードレール7等ではこの照射光が実際には測定点Bに相当する側面に当っていない。その結果、脱線防止用ガードレール7等ではレーザ変位センサ3の測定光による測定距離が本来よりも距離dだけ短くなる誤差を生じる。
この誤差dは、現在のところ変位枠Wの中の変位において、左側レールにおいて変位枠Wの左上側角にレール9が位置したときなどに最大で30mm以上の誤差があり、左側レールにおいて変位枠Wの右下側角にレール9が位置したときに誤差は最小となって、それでも19mm程度はある。
【0027】
その結果、この測定三角形Sによりレールの位置(基準点P)として算出される座標XZは、本来のレール9の基準点Pとして測定されるべき位置とにずれが生じる。このずれは、左右方向のレーザ変位センサ2の測定光により測定される基準点Pあるいはレーザ変位センサ3の測定光により測定される基準点Pとの間の位置ずれとして表れてくる。
シャーシ11に取付けられたレール変位検出器1の上下方向の距離検出のレーザ変位センサ2の測定基準点Paは、通常、基準位置(原点)におかれたレール9の頭頂面9aに対して350mm程度の位置であり、左右方向の距離検出のレーザ変位センサ3の測定基準点Pbは、通常、基準位置(原点)におかれたレール9の頭頂面9aに対して260mm程度の位置にある。そして、距離検出のレーザ変位センサ2の測定基準点Paとレーザ変位センサ3の測定基準点PbのX方向の距離は、430mm程度である。
【0028】
このような条件下で測定三角形Sを形成して測定されるレール9の位置座標と、上下方向の距離検出のレーザ変位センサ2のみで測定されるレール9の位置座標の測定値との間で発生する測定誤差(位置ずれ量)は、測定対象が脱線防止用ガードレール7になっているときには右方向(X方向)においては測定されるレール基準点Pの位置ずれ量kは、k>±3.3mmであり、上下方向(Z方向)においては、k>±1.5mmである。
言い換えれば、レール9の検出については、測定されるレール基準点Pの位置ずれ量kが変位枠Wの範囲における位置座標の誤差として−3.3mm<=X<=+3.3mmでかつ−1.5mm<=Z<=+1.5mmの範囲にあるとすることができる。
なお、左右方向の距離検出のレーザ変位センサ3のみで測定されるレール9の位置座標の測定値との間で発生する測定誤差は、対象が脱線防止用ガードレール7では左右方向(X方向)において測定されるレール基準点Pの位置ずれ量kは、k>±2.0mmであり、上下方向(Z方向)においては、k>±0.5mmであり、左右方向と上下方向の距離検出のレーザ変位センサ2の誤差の場合よりも小さい。
【0029】
そこで、この誤差値をレール検出座標の位置ずれ量kとしてレール9と脱線防止用ガードレール7等とを区別することができる。
シャーシ11に取付けられたレール変位検出器1のレール9に対する位置は、実際上は、前記のような条件より多少前後する数値の場合がある。そこで、次のレール検出処理として、ここでは、レール検出座標の位置ずれ量kとして、−2mm<=X<=+2mmでかつ−1mm<=Z<=+1mmの範囲にあるものをもって行うことにする。このような条件に設定することで、シャーシ11に取付けられたレール変位検出器1の位置が25%程度変動しても問題なく、脱線防止用ガードレール7等を排除してレールだけを検出することが可能である。
【0030】
図5は、レール変位量測定におけるレール検出座標の位置ずれ量kによるレール検出処理のフローチャートである。
MPU21によるレール変位量測定プログラム22aの実行による前記のような追従をさせても軌道上にあるカーブ等では、レール9の位置は大きく変動してレール9が検出できなくなることがある。
このような時には、レール未検出か否かの判定により(ステップ101)、レール9からの反射光がなくあるいは規定値以下となって、レール9を見失い、距離算出回路部6から正規の状態での距離算出信号が得られなくなると、MPU21が測定光走査プログラム22cをコールして実行する。
なお、正規の状態での距離算出信号が得られると、ステップ101でNOになり、レール変位量測定プログラム22aにリターンしてステップ114のレール変位量測定を続行する。
【0031】
一方、ステップ101でYESとなると、レール未検出処理スタートで測定光走査プログラム22cがMPU21に実行され、回動ミラー4の角度αを軌道内内側に振って上下方向の距離検出のレーザ変位センサ2の測定光(投光光La)を軌道内内側の初期位置から外側へとレール横断方向において回転走査をさせて(ステップ102)、距離測定に対応する反射光が測定光として得られているかを距離測定信号があるか否かにより判定し(ステップ103)、ここでNOとなると、ステップ102へと戻り、さらに外側へと測定光(投光光La)を回転走査をさせる。
ここで、YESのときには回転走査を停止する(ステップ104)。
そして、MPU21が測定三角形形成プログラム22bをコールして実行し、追い込み処理を行い(ステップ105)、測定三角形Sが形成されたか否かを判定する(ステップ106)。
【0032】
ステップ106でNOのときには、ステップ105へと戻り、回動ミラー4の角度αを変化させて回動ミラー5の角度βをそれに合わせて振って、測定点Aの測定距離DAと測定点Aの測定距離DBを得て測定三角形Sを形成する追い込み処理を続ける。
ステップ106でYESと判定されたときには、レール9の位置座標(X3,Z3)を算出してメモリに記憶する(ステップ107)、さらに、上下方向の距離検出のレーザ変位センサ2だけによるレール位置座標(X4,Z4)を算出する(ステップ108)。
次に座標値の誤差ΔX=X4−X3,ΔZ=Z4−Z3を算出して(ステップ109)、−2mm<=ΔX<=+2mmでかつ−1mm<=ΔZ<=+1mmの範囲にある否かの判定をする(ステップ110)。
この判定の結果、NOであるときには、回転走査終了かを判定して(ステップ111)、NOのときには、ステップ102へと戻り、停止した回転走査を再開して軌道内で内側から外側へとさらに振って、ステップ102以降の処理を実行する。
ステップ111でYESのときには、上下方向の距離検出のレーザ変位センサ2の測定光を軌道内の内側の回転走査の初期位置に戻して(ステップ112)、ステップ102へと戻り、再び回動ミラー4の角度αを軌道内内側に振って内側から外側へと測定光の回転走査を再開する。
ステップ110でYESのときには、ステップ107で算出したレール位置座標(X3,Z3)からレール変位量を算出してレール変位量測定プログラム22aにリターンしてレール変位量測定処理に戻る(ステップ113)。そしてレール変位量測定処理を続行する(ステップ114)。
なお、この実施例では、ステップ102において軌道内内側の初期位置から外側へとレール横断方向において回転走査をしているが、これは逆に、初期位置をレールの外側として外側から内側に回転走査するようにしてもよい。
【産業上の利用可能性】
【0033】
以上説明してきたが、実施例では、上下方向の距離検出のレーザ変位センサ2により検出されるレールの座標値を基準としてステップ109において座標値の誤差ΔX,ΔZを算出しているが、この発明は、図3の説明から理解できるように、左右方向の距離検出のレーザ変位センサ3により検出されるレールの座標値を基準として座標値の誤差ΔX,ΔZを算出を算出して所定値と比較してもよい。
また、実施例では、レールからの反射光がなくあるいは規定値以下となってレール未検状態となる場合のガードレールについての誤検出を中心に説明しているが、この発明では、常時、レール判定をしながらレール変位量の測定をすることで、レールに沿って設けられた踏切の地面などの頭面がレールに比べて比較的幅のある平面形状の物体に対する誤認も防止することができる。
【符号の説明】
【0034】
1…レール変位検出器、1a…測定基板、
2,3…レーザ変位センサ、4,5…回転ミラー、
6…距離算出回路部、7…脱線防止用ガードレール、
8…踏切などの地面、9…レール、9a…頭頂面、
10…レール変位量測定装置、11…シャーシ(車体)、
20…演算処理・制御装置、21…MPU、
22…メモリ、22a…レール変位量測定プログラム、
22b…測定三角形形成プログラム、
22c…測定光走査プログラム、
22d…レール位置誤差算出・レール検出プログラム、
22e…パラメータ領域、23…インタフェース。
【特許請求の範囲】
【請求項1】
既知の距離にある2点に配置された第1および第2の距離検出器とレールとの間で測定三角形を形成して前記第1および前記第2の距離検出器から測定光を前記レールに照射してレールの位置を測定するレール変位量測定装置におけるレール検出方法であって、
前記第1の距離検出器の測定光を前記レールの頭面に照射し、前記第2の距離検出器の測定光をレール頭部の内軌側側面に照射して前記測定三角形を形成してこの測定三角形において測定される前記レールの位置とこの測定三角形において前記第1の距離検出器および前記第2の距離検出器のいずれかにより測定される前記レールの位置との位置誤差を前記レール変位量測定装置において算出して、この位置誤差が所定値の範囲にあるときに前記レール変位量測定装置が測定対象を前記レールとするレール変位量測定装置におけるレール検出方法。
【請求項2】
レールからの反射光がなくあるいは規定値以下となったときに前記第1の距離検出器の測定光をレール横断方向に走査して距離測定に対応するレベルの反射光があるときに前記測定三角形を形成してこの測定三角形において前記位置誤差が所定値の範囲にあるか否かが判定され前記レールの検出をする請求項1記載のレール変位量測定におけるレール検出方法。
【請求項3】
前記第1および前記第2の距離検出器はレーザ変位センサであり、前記レールの位置は、前記レールが基準位置にあるときの前記レールの位置を原点として前記レール横断方向と前記レールの高さ方向の位置座標として測定され、前記測定三角形の形成は、前記基準位置において形成された前記測定三角形の測定光の角度が角度基準とされて変位した前記レールに対して形成されるものであって、前記位置誤差は、座標誤差である請求項2記載のレール変位量測定におけるレール検出方法。
【請求項4】
前記レールに沿って脱線防止用ガードレールが鉄道軌道上に設けられていて、前記所定の範囲は、少なくとも前記レールと前記脱線防止用ガードレールとを区分けするものである請求項3記載のレール変位量測定におけるレール検出方法。
【請求項5】
前記所定値の範囲は、Xを前記レール横断方向とし、Zを前記レールの高さ方向としたときに、前記座標誤差が3.3mm<=X<=−3.3mm、1.5mm<=Z<=−1.5mmの範囲にあるときに前記レールと判定する請求項4記載のレール変位量測定におけるレール検出方法。
【請求項6】
既知の距離にある2点に配置された第1および第2の距離検出器とレールとの間で測定三角形を形成して前記第1および前記第2の距離検出器から測定光を前記レールに照射してレールの位置を測定するレール変位量測定装置において、
前記第1の距離検出器の測定光を前記レールの頭面に照射し、前記第2の距離検出器の測定光をレール頭部の内軌側側面に照射して前記測定三角形を形成する測定三角形形成手段と、
この測定三角形において測定される前記レールの位置とこの測定三角形において前記第1の距離検出器および前記第2の距離検出器のいずれかにより測定される前記レールの位置との位置誤差を算出する位置誤差算出手段と、
この位置誤差が所定値の範囲にあるときに前記レール変位量測定装置が測定対象を前記レールと判定する判定手段とを備えるレール変位量測定装置。
【請求項7】
前記レールからの反射光がなくあるいは規定値以下となったときに前記第1の距離検出器の測定光をレール横断方向に走査する走査手段をさらに有し、
距離測定に対応するレベルの反射光があるときに前記測定三角形形成手段が前記測定三角形を形成し、この測定三角形において前記位置誤差算出手段により算出された前記位置誤差が前記判定手段により前記所定値の範囲にあるか否かが判定されて前記レールが検出される請求項6記載のレール変位量測定におけるレール検出方法。
【請求項8】
前記第1および前記第2の距離検出器はレーザ変位センサであり、前記レールの位置は、前記レールが基準位置にあるときの前記レールの位置を原点として前記レール横断方向と前記レールの高さ方向の位置座標として測定され、前記測定三角形の形成は、前記基準位置において形成された前記測定三角形の測定光の角度が角度基準とされて変位した前記レールに対して形成されるものであって、前記位置誤差は、座標誤差である請求項7記載のレール変位量測定装置。
【請求項9】
前記レールに沿って脱線防止用ガードレールが鉄道軌道上に設けられていて、前記所定の範囲は、少なくとも前記レールと前記脱線防止用ガードレールとを区分けするものである請求項8記載のレール変位量測定装置。
【請求項10】
前記所定値の範囲は、Xを前記レール横断方向とし、Zを前記レールの高さ方向としたときに、前記座標誤差が3.3mm<=X<=−3.3mm、1.5mm<=Z<=−1.5mmの範囲にあるときに前記レールと判定する請求項9記載のレール変位量測定装置。
【請求項1】
既知の距離にある2点に配置された第1および第2の距離検出器とレールとの間で測定三角形を形成して前記第1および前記第2の距離検出器から測定光を前記レールに照射してレールの位置を測定するレール変位量測定装置におけるレール検出方法であって、
前記第1の距離検出器の測定光を前記レールの頭面に照射し、前記第2の距離検出器の測定光をレール頭部の内軌側側面に照射して前記測定三角形を形成してこの測定三角形において測定される前記レールの位置とこの測定三角形において前記第1の距離検出器および前記第2の距離検出器のいずれかにより測定される前記レールの位置との位置誤差を前記レール変位量測定装置において算出して、この位置誤差が所定値の範囲にあるときに前記レール変位量測定装置が測定対象を前記レールとするレール変位量測定装置におけるレール検出方法。
【請求項2】
レールからの反射光がなくあるいは規定値以下となったときに前記第1の距離検出器の測定光をレール横断方向に走査して距離測定に対応するレベルの反射光があるときに前記測定三角形を形成してこの測定三角形において前記位置誤差が所定値の範囲にあるか否かが判定され前記レールの検出をする請求項1記載のレール変位量測定におけるレール検出方法。
【請求項3】
前記第1および前記第2の距離検出器はレーザ変位センサであり、前記レールの位置は、前記レールが基準位置にあるときの前記レールの位置を原点として前記レール横断方向と前記レールの高さ方向の位置座標として測定され、前記測定三角形の形成は、前記基準位置において形成された前記測定三角形の測定光の角度が角度基準とされて変位した前記レールに対して形成されるものであって、前記位置誤差は、座標誤差である請求項2記載のレール変位量測定におけるレール検出方法。
【請求項4】
前記レールに沿って脱線防止用ガードレールが鉄道軌道上に設けられていて、前記所定の範囲は、少なくとも前記レールと前記脱線防止用ガードレールとを区分けするものである請求項3記載のレール変位量測定におけるレール検出方法。
【請求項5】
前記所定値の範囲は、Xを前記レール横断方向とし、Zを前記レールの高さ方向としたときに、前記座標誤差が3.3mm<=X<=−3.3mm、1.5mm<=Z<=−1.5mmの範囲にあるときに前記レールと判定する請求項4記載のレール変位量測定におけるレール検出方法。
【請求項6】
既知の距離にある2点に配置された第1および第2の距離検出器とレールとの間で測定三角形を形成して前記第1および前記第2の距離検出器から測定光を前記レールに照射してレールの位置を測定するレール変位量測定装置において、
前記第1の距離検出器の測定光を前記レールの頭面に照射し、前記第2の距離検出器の測定光をレール頭部の内軌側側面に照射して前記測定三角形を形成する測定三角形形成手段と、
この測定三角形において測定される前記レールの位置とこの測定三角形において前記第1の距離検出器および前記第2の距離検出器のいずれかにより測定される前記レールの位置との位置誤差を算出する位置誤差算出手段と、
この位置誤差が所定値の範囲にあるときに前記レール変位量測定装置が測定対象を前記レールと判定する判定手段とを備えるレール変位量測定装置。
【請求項7】
前記レールからの反射光がなくあるいは規定値以下となったときに前記第1の距離検出器の測定光をレール横断方向に走査する走査手段をさらに有し、
距離測定に対応するレベルの反射光があるときに前記測定三角形形成手段が前記測定三角形を形成し、この測定三角形において前記位置誤差算出手段により算出された前記位置誤差が前記判定手段により前記所定値の範囲にあるか否かが判定されて前記レールが検出される請求項6記載のレール変位量測定におけるレール検出方法。
【請求項8】
前記第1および前記第2の距離検出器はレーザ変位センサであり、前記レールの位置は、前記レールが基準位置にあるときの前記レールの位置を原点として前記レール横断方向と前記レールの高さ方向の位置座標として測定され、前記測定三角形の形成は、前記基準位置において形成された前記測定三角形の測定光の角度が角度基準とされて変位した前記レールに対して形成されるものであって、前記位置誤差は、座標誤差である請求項7記載のレール変位量測定装置。
【請求項9】
前記レールに沿って脱線防止用ガードレールが鉄道軌道上に設けられていて、前記所定の範囲は、少なくとも前記レールと前記脱線防止用ガードレールとを区分けするものである請求項8記載のレール変位量測定装置。
【請求項10】
前記所定値の範囲は、Xを前記レール横断方向とし、Zを前記レールの高さ方向としたときに、前記座標誤差が3.3mm<=X<=−3.3mm、1.5mm<=Z<=−1.5mmの範囲にあるときに前記レールと判定する請求項9記載のレール変位量測定装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2011−69699(P2011−69699A)
【公開日】平成23年4月7日(2011.4.7)
【国際特許分類】
【出願番号】特願2009−220415(P2009−220415)
【出願日】平成21年9月25日(2009.9.25)
【出願人】(000173784)財団法人鉄道総合技術研究所 (1,666)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
【公開日】平成23年4月7日(2011.4.7)
【国際特許分類】
【出願日】平成21年9月25日(2009.9.25)
【出願人】(000173784)財団法人鉄道総合技術研究所 (1,666)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
[ Back to top ]