
ロケーションコンテキスト識別子を用いた移動局ナビゲーションのためのスケーラブルルーティング
本明細書で開示する例は、第1のマップ上で移動局の推定された位置に最も近い、指定量までの当該ポイントを識別することと、識別された当該ポイントのうちの第1の当該ポイントに関連付けられた第1のロケーションコンテキスト識別子によって識別される第2のマップを選択することと、第1のマップと第2のマップとを使用して移動局の推定された位置から目的ポイントへのルートを判断することとに関し得る。

【発明の詳細な説明】
【技術分野】
【0001】
米国特許法第119条に基づく優先権の主張
本出願は、本出願の譲受人に譲渡され、参照により本明細書に組み込まれる、2010年1月14日に出願された「Seamless Pedestrian Navigation Through Multi-Floor, Indoor and Outdoor Contexts」と題する米国仮出願第61/295,089号と、2010年1月14日に出願された「Scalable Routing on Static Points of Interest (POIs)」と題する米国仮出願第61/295,149号との米国特許法第119条に基づく優先権を主張する。
【0002】
本明細書で開示する主題は、ロケーションコンテキスト識別子を使用したスケーラブルルーティングを用いた移動局ナビゲーションに関する。
【背景技術】
【0003】
セルラー電話などの移動局の位置は、様々なシステムから収集された情報に基づいて推定され得る。1つのそのようなシステムは、いくつかの移動局のための通信をサポートするためにいくつかのアクセスポイントを含むワイヤレスローカルアクセスネットワーク(WLAN)通信システムを含み得る。また、移動局の位置を推定するために衛星測位システム(satellite positioning system)(SPS)が利用され得る。移動局のためのナビゲーションソリューションは、移動局の現在の推定された位置に少なくとも部分的に基づき、現在の推定された位置から目的ポイントに経路をルーティングすることを含み得る。ルーティングソリューションは、たとえば、歩行者または運転者が目的ポイントへの経路を移動するのを助けるために移動局上のグラフィカルユーザインターフェース上に表示され得る。しかしながら、たとえば、現在の推定された位置から目的ポイントへのルートが屋内部分と屋外部分とを含む場合、または別の例では、ルートが屋内部分中に複数のフロアを含む場合、困難が生じ得る。
【発明の概要】
【課題を解決するための手段】
【0004】
例示的な実装形態では、方法は、移動局の位置を推定するステップと、第1のマップ上で移動局の推定された位置に最も近い、指定量までの当該ポイントを識別するステップと、識別された当該ポイントのうちの第1の当該ポイントに関連付けられた第1のロケーションコンテキスト識別子によって識別される第2のマップを選択するステップと、第1のマップと第2のマップとを使用して移動局の推定された位置から目的ポイントへのルートを判断するステップとを含み得る。別の例示的な実装形態では、物品は、移動局の位置を推定することと、第1のマップ上で移動局の推定された位置に最も近い、指定量までの当該ポイントを識別することと、識別された当該ポイントのうちの第1の当該ポイントに関連付けられた第1のロケーションコンテキスト識別子によって識別される第2のマップを選択することと、第1のマップと第2のマップとを使用して移動局の推定された位置から目的ポイントへのルートを判断することとを行うための、移動局のプロセッサによって実行可能な命令を記憶した記憶媒体を含み得る。さらなる例示的な実装形態では、移動局は、ナビゲーション動作のために複数のマップを記憶するためのメモリと、プロセッサであって、複数のマップのうちの第1のマップ上で当該ポイントに対応する移動局の推定された位置に最も近い、指定量までの当該ポイントを識別することと、識別された当該ポイントのうちの第1の当該ポイントに関連付けられた第1のロケーションコンテキスト識別子によって識別される複数のマップのうちの第2のマップを選択することと、第1のマップと第2のマップとを使用して移動局の推定された位置から目的ポイントへのルートを判断することとを行うためのプロセッサとを含み得る。追加の例示的な実装形態では、装置は、移動局の位置を推定するための手段と、第1のマップ上で移動局の推定された位置に最も近い、指定量までの当該ポイントを識別するための手段と、識別された当該ポイントのうちの第1の当該ポイントに関連付けられた第1のロケーションコンテキスト識別子によって識別される第2のマップを選択するための手段と、第1のマップと第2のマップとを使用して移動局の推定された位置から目的ポイントへのルートを判断するための手段とを含み得る。
【0005】
以下の図を参照しながら非限定的で非網羅的な例について説明し、様々な図の全体を通して、同様の参照番号は同様の部分を指す。
【図面の簡単な説明】
【0006】
【図1】例示的なワイヤレス通信ネットワークおよび例示的な衛星測位システムと通信している例示的な移動局を示す概略ブロック図である。
【図2】移動局の例示的な実施形態の概略ブロック図である。
【図3】1つまたは複数のワイヤレス通信ネットワークを介していくつかの移動局と通信している例示的なアルマナックサーバを示す図である。
【図4】例示的なナビゲーション経路を含む屋外エリアの例示的なマップを示す図である。
【図5】屋外エリアと屋内エリアとの間の遷移における例示的なナビゲーション経路と当該ポイントとを示す図である。
【図6】例示的な屋内エリアの例示的なフロアプランを示す図である。
【図7】グリッドに区分される例示的な屋内エリアの例示的なフロアプランを示す図である。
【図8】移動局ナビゲーションのためのスケーラブルルーティングのための例示的なプロセスの流れ図である。
【図9】移動局ナビゲーションのためのスケーラブルルーティングのための例示的なプロセスの流れ図である。
【図10】屋外エリアを含む例示的なルーティングシナリオを示す図である。
【図11】屋内エリアと屋外エリアとを含む例示的なルーティングシナリオを示す図である。
【図12】屋外エリアと屋内エリアとを含む例示的なルーティングシナリオを示す図である。
【図13】屋外エリアによって分離された2つの屋内エリアを含む例示的なルーティングシナリオを示す図である。
【図14】建築物中の開始当該ポイントから屋外エリアを通って別の建築物中の目的当該ポイントに至る例示的なルーティング経路を示す図である。
【発明を実施するための形態】
【0007】
上記で説明したように、たとえば、セルラー電話などの移動局の位置は、様々なシステムから収集された情報に基づいて推定され得る。1つのそのようなシステムは、いくつかの移動局のための通信をサポートするためにいくつかのアクセスポイントを含むワイヤレスローカルアクセスネットワーク(WLAN)通信システムを含み得る。また、移動局の位置を推定するために衛星測位システム(SPS)が利用され得る。移動局のためのナビゲーションソリューションは、移動局の現在の推定された位置に少なくとも部分的に基づき、現在の推定された位置から目的ポイントに経路をルーティングすることを含み得る。ルーティングソリューションは、たとえば、歩行者または運転者が目的ポイントへの経路を移動するのを助けるために移動局上のグラフィカルユーザインターフェース上に表示され得る。しかしながら、たとえば、現在の推定された位置から目的ポイントへのルートが屋内部分と屋外部分とを含む場合、困難が生じ得る。さらに、たとえば、屋内部分が複数のフロアを含む場合、困難が生じ得る。
【0008】
移動局の現在の位置から目的ポイントへのルートを移動し得るエンドツーエンドナビゲーションソリューションは、屋外ナビゲーション技法と屋内ナビゲーション技法との統合を必要とし得る。屋内ルーティング技法と屋外ルーティング技法とでは、たとえば、マップスケール、ルーティングアルゴリズム、またはロケーション識別技術が異なり得る。一態様では、例示的なナビゲーション技法では、ユーザは、ナビゲーション動作のために利用され得る1つまたは複数のマップに気づいている必要がないことがあり、ユーザは、マップに変化がある場合、たとえば、ユーザが屋外エリアから屋内エリアに移動するとき、またはユーザが屋内エリア中でフロア間を移動するときにマップに変化がある場合、アクションをとる必要がないことがある。
【0009】
一態様では、1つのナビゲーションマップから別のナビゲーションマップへの遷移は、1つまたは複数のロケーションコンテキスト識別子(location context identifier)(LCI)を個々に含み得る1つまたは複数の当該位置(point of interest)(POI)でマークされたマップを利用するシステムを使用することによって達成され得る。例示的なナビゲーションシステム内の1つまたは複数のマップはLCIに関連付けられ得る。一態様では、マップはLCIによって一意に識別され得る。さらに、建築物のフロアは、それぞれのLCIによって個々に識別される複数のマップから構成され得る。例示的な実装形態では、建築物のフロアはLCIによって完全に識別され得る。さらに、別の態様では、POIは、POIから到達可能であり得る複数のLCIへの参照を含み得る。さらなる態様では、LCIは、汎用一意識別子(universal unique identifier)(UUID)ハッシュアルゴリズムなどを使用して生成され得る。このようにして、第1のマップ上のPOIアノテーションは、1つまたは複数の他の関連するマップへの1つまたは複数の参照を与え得る。一態様では、1つまたは複数のマップは、埋込みLCI情報を含んでいる1つまたは複数のPOIを使用することによって、別のマップにおいて参照され得る。ナビゲーション動作中に、ユーザが埋込みLCI情報を含む当該ポイントのうちの1つに到着した場合、その埋込み情報を利用して後続のマップを検索し得、その後続のマップを使用してルート判断が継続し得る。本明細書で使用する「当該ポイント」という用語は、1つのエリアから別のエリアへの遷移を識別し得るマップ上の任意のポイントに関係する。例示的なPOIは、階段、エレベータ、エスカレータ、動く歩道、外部ドア、建築物の2つの屋内部分を分離する内部ドア、または2つの建築物の間の接続を含み得る。ただし、これらは例示的なPOIにすぎず、請求する主題の範囲はこの点について限定されない。さらに、本明細書で使用する「ロケーションコンテキスト識別子」という用語は、移動局のためのナビゲーション動作において使用され得る1つまたは複数のマップを識別する当該位置に関連付けられた任意の情報に関係する。
【0010】
一態様では、移動局の位置が推定され得る。第1のマップ上の1つまたは複数のPOIのうちのどれが、移動局の推定された位置に最も近いかに関する判断が行われ得る。第1のマップ上のPOIは、当該ポイントに関連付けられた第2のマップを識別するLCIをその中に埋め込んでいることがある。移動局の推定された位置から指定された目的地へのルートを判断するために、ナビゲーション動作において移動局が使用するための第2のマップが選択され得る。一態様では、ルート判断を完了するために、必要に応じて追加のマップが選択され得る。また、さらなる態様では、ルーティング技法は反復的であり得る。1つまたは複数のPOI中に埋め込まれたLCIを使用して複数のマップが検索され得る。たとえば、ユーザが1つの建築物から別の建築物に移動することを望む場合、第1の建築物のマップが検索され、第2の建築物に通じる屋外エリアのマップが検索され、また、第2の建築物の第2のマップが検索され得る。たとえば、最短ルートを判断するために様々な可能なルートが分析され得る。
【0011】
一例では、第1のマップは、ナビゲーション動作を実行するために移動局によって使用され得る。一例では、第1のマップは屋外エリアのマップを含み得る。一態様では、ユーザは移動局を建築物の入口に携行し得る。また一態様では、建築物の入口のロケーションは、第1のマップの一部として記憶された情報に応じた当該ポイントを含み得る。移動局が、この例では、建築物の入口のロケーションに対応する当該ポイントに到着したと検出することの結果として、当該ポイントに関連付けられたロケーションコンテキスト識別子によって識別される第2のマップが検索され得、移動局は、その検索された第2のマップを使用してナビゲーション動作を実行し得る。本例では、第2のマップは、建築物内の屋内空間のうちの少なくとも一部のマップを含み得る。このようにして、ユーザは、移動局によって提供されるナビゲーションソリューションによって入口に案内されながら、移動局を建築物の入口に携行し得、ユーザが特定のアクションを起こすことなしに、移動局は建築物の内部のマップを自動的に検索し得、ユーザが建築物に入ったとき、移動局はナビゲーションソリューションを提供し続け得る。したがって、この例では屋外エリアから屋内エリアに移動することを含む、1つのエリアから別のエリアに横断する際に、ユーザによってシームレスな遷移が経験され得る。もちろん、これらは例示的なナビゲーション動作にすぎず、請求する主題はこれらの点について範囲を限定されない。
【0012】
一態様では、移動局の様々な時点の位置について推定が行われ得る。たとえば、移動局の位置の推定値を判断するために、以下でより十分に説明するように、様々なアクセスポイントまたは他のワイヤレス送信機から受信した信号を使用した、三辺測量、三角測量、またはマルチラテレーション動作が利用され得る。移動局の位置の初期推定値を判断するための追加の技法は、たとえば、初期推定値を概算するために1つまたは複数の衛星測位システム(SPS)信号に基づいて以前に判断されたロケーション推定値を利用することを含み得る。別の例では、以前に推定されたロケーションに基づいて移動局の位置の推定値を判断するために、たとえば、加速度計またはジャイロスコープなど、移動局中のセンサが利用され得る。請求する主題は、移動局の位置の推定値を判断するための特定の技法に限定されないことに留意されたい。
【0013】
図1は、移動局200と通信しているSPS110およびワイヤレス通信ネットワーク120の概略ブロック図である。ワイヤレス通信ネットワーク120は、この例では、たとえば、移動局200を含むいくつかの移動局のためのボイス通信を可能にすることができるセルラー通信ネットワークを含み得、ボイス通信を行うことに加えてさらに移動局の位置推定をサポートし得る。ワイヤレス通信ネットワーク120はいくつかのネットワークタイプのうちのいずれかを含み得、それのいくつかの例について以下で説明する。ワイヤレス通信ネットワーク120は、この例では、たとえば、移動局200など、いくつかのワイヤレス端末のための通信を行うワイヤレス送信機132、134、および136を含む。簡単のために、図1には、ほんのいくつかのワイヤレス送信機132、134、および136を示し、1つの移動局200を示してある。もちろん、他の例は追加の数のワイヤレス送信機を含み得、図1に示すワイヤレス送信機の構成は例示的な構成にすぎない。また、ワイヤレス通信ネットワーク120は例示的なワイヤレス通信システムにすぎず、請求する主題の範囲はこの点について限定されない。
【0014】
本明細書で使用する「ワイヤレス送信機」という用語は、たとえば、セルラーネットワークなど、ワイヤレス通信システムにおいて通信を可能にするために使用される任意のワイヤレス通信局またはデバイスを含むことを意味するが、請求する主題の範囲はこの点について限定されない。セルラーネットワークにおいて利用されるワイヤレス送信機の例示的なタイプは基地局と呼ばれることがある。別の態様では、ワイヤレス送信機は、セルラー電話サービスを企業または自宅に拡張するために利用されるフェムトセルを含み得る。そのような実装形態では、1つまたは複数の移動局は、たとえば、符号分割多元接続(CDMA)セルラー通信プロトコルを介してフェムトセルと通信し得、フェムトセルは、インターネットなどの別のブロードバンドネットワークを介してより大きいセルラー通信ネットワークへの移動局アクセスを与え得る。別の態様では、ワイヤレス送信機は、様々な電子デバイスタイプのうちのいずれかの中に含まれ得る。一態様では、ワイヤレス送信機は、たとえば、ワイヤレスローカルエリアネットワーク(WLAN)アクセスポイントを含み得る。そのようなWLANは、一態様では、IEEE802.11x規格のうちの1つまたは複数と互換性があるネットワークを含み得るが、請求する主題の範囲はこの点について限定されない。さらに、デバイスについて説明する際の「送信機」という用語の使用は、送信することのみにそのデバイスの機能を限定するものではない。たとえば、基地局およびアクセスポイントは、一般に、ワイヤレス信号を送信することと受信することの両方が可能である。
【0015】
本明細書で使用する「移動局(mobile station)」(MS)という用語は、時々位置が変化し得るデバイスを指す。そのような位置の変化は、いくつかの例として、方向、距離、配向などに対する変化を含み得る。特定の例では、移動局は、セルラー電話、ワイヤレス通信デバイス、ユーザ機器、ラップトップコンピュータ、他のパーソナル通信システム(PCS)デバイス、携帯情報端末(PDA)、パーソナルオーディオデバイス(PAD)、ポータブルナビゲーションデバイス、または他のポータブル通信デバイスを含み得る。移動局はまた、機械可読命令によって制御される機能を実行するように適応されたプロセッサまたは計算プラットフォームを含み得る。
【0016】
一態様では、SPS110は、いくつかの宇宙ビークル(space vehicle)(SV)、たとえばSV112、114、および116を含み得る。一例では、SPS110は、GPS、GLONASSおよびGalileoなど、1つまたは複数の衛星測位システムを含み得るが、請求する主題の範囲はこの点について限定されない。1つまたは複数の態様では、移動局200は、SV112、114、および116から信号を受信し、ワイヤレス送信機132、134、および136のうちの1つまたは複数と通信し得る。たとえば、移動局200は、SVまたはワイヤレス送信機のうちの1つまたは複数から受信した1つまたは複数の信号から1つまたは複数の測定値を取得し得る。ただし、いくつかの状況では、SPSからタイミング信号が入手できないことがある。そのような状況では、移動局200は、ワイヤレス送信機132、134、または136のうちの1つまたは複数との通信を通して伝搬遅延情報を収集し得る。移動局200は、ワイヤレス送信機132、134、または136のうちの1つまたは複数との通信を通して受信したタイミング較正パラメータに少なくとも部分的に基づいて、さらにワイヤレス送信機の既知のロケーションに少なくとも部分的に基づいて、移動局の位置を計算し得る。移動局200はまた、ワイヤレス送信機ソース、衛星ソース、または両方から受信した信号の推定伝搬遅延を利用して、そのようなソースまでの距離を測定し得る。
【0017】
別の態様では、位置判断計算は、移動局200においてではなく、たとえば、図1に示すロケーションサーバ170など、ネットワークエンティティによって実行され得る。そのような計算は、ワイヤレス送信機132、134、または136のうちの1つまたは複数から移動局200によって収集された情報に少なくとも部分的に基づき得る。さらなる態様では、ロケーションサーバ170は計算された位置を移動局200に送信し得る。
【0018】
モバイル交換センター(MSC)140は、この例ではワイヤレス送信機132、134、および136に結合され得、さらに、公衆交換電話網(PSTN)、パケットデータサービングノード(PDSN)160など、他のシステムおよびネットワークに結合し得る。ロケーションサーバ170は、ロケーションデータを収集し、フォーマッティングし、位置推定のために移動局への支援を提供するか、または移動局の位置推定値を得るための計算を実行し得る。BSAサーバ180はBSAデータベース185を管理し、BSAデータベース185は、この例では、ワイヤレス通信ネットワーク120のための基地局アルマナックを記憶する。
【0019】
また一態様では、ロケーションサーバ170は、移動局200に1つまたは複数のマップを供給し得る。移動局200に供給されるマップは、1つまたは複数のマップ上でそれぞれの1つまたは複数の当該ポイントに関連付けられた1つまたは複数のロケーションコンテキスト識別子(LCI)に少なくとも部分的に依存し得る。LCIはマップを一意に識別し得、マップ中に含まれているPOIは、そのPOIが到達し得る1つまたは複数のLCIへの参照を含み得る。たとえば、建築物のドアはPOIを含み得、その特定のPOIは、ドアの屋外側の屋外エリアのマップを識別するLCIに関係する情報を含み得、また、ドアの他方の屋内側の屋内エリアのマップを識別するLCIに関係する情報を含み得る。移動局200に供給されたマップは、ユーザのためのナビゲーションソリューションを判断するために移動局200によって利用され得る。マップは、移動局200上のグラフィカルユーザインターフェースまたはディスプレイスクリーンを介してユーザに視覚的に提示され得る。本明細書で使用する「マップ」という用語は、開始ポイントと目的ポイントとの間でナビゲーションソリューションが判断され得るように屋内エリアまたは屋外エリアを記述し得る任意の情報に関係する。一態様では、マップは、ルート計算を可能にし得るメタデータを含み得る。たとえば、マップのグラフ表現がルート計算を可能にし得る。様々な例示的なマップの例示的なグラフ表現について以下で説明する。前述のように、マップは、移動局または他のコンピューティングプラットフォーム上に表示され得る情報を含み得る。マップは1つまたは複数の当該ポイントをさらに含み得る。当該ポイントは、座標のセット、たとえばSPS座標のセットに関連付けられ得る。当該ポイントは1つまたは複数のロケーションコンテキスト識別子にさらに関連付けられ得る。前述のように、LCIは別のマップの識別情報を含み得る。一態様では、LCIはマップへのポインタを含み得るが、請求する主題の範囲はこの点について限定されない。
【0020】
図2は、移動局200の例示的な実装形態の概略ブロック図である。一態様では、移動局200はSPS受信機210とワイヤレス通信トランシーバ220とを含む。したがって、移動局200は、SPS110などの1つまたは複数のSPSと通信し、たとえば、一態様ではセルラーネットワークを含むか、または別の態様ではWLANを含む、ワイヤレス通信ネットワーク120などの1つまたは複数の地上波ワイヤレスネットワークと通信し得る。別の態様では、移動局200は、一例では、マップ記憶領域230にマップ情報を記憶し、基地局アルマナック記憶領域240に基地局アルマナック情報を記憶するために区分されたメモリデバイスをさらに含み得る。
【0021】
さらなる態様では、移動局200は、この例では、たとえば、デッドレコニングナビゲーション動作において利用され得る慣性測定ユニット(Inertial Measurement Unit)(IMU)270に組み込まれた1つまたは複数のセンサを含み得る。IMU270に組み込まれ得る例示的なセンサは加速度計またはジャイロスコープを含み得る。ただし、請求する主題はこの点について限定されない。移動局200は、この例ではプロセッサ260をさらに含む。もちろん、これは移動局の構成の一例にすぎず、請求する主題の範囲はこの点について限定されない。
【0022】
一態様では、複数のワイヤレス送信機のためのロケーション情報は、ワイヤレス通信ネットワーク120中のBSAサーバ180などのネットワークエンティティに記憶されるか、またはワイヤレスネットワーク中の広範囲の他のリソースのうちのいずれかに記憶され得る。さらに、一例では、ワイヤレス送信機のためのロケーション情報は、経度および緯度を含み得、また別の例では高度情報を含み得る。ただし、これらはワイヤレス送信機のためのロケーション情報の例にすぎず、請求する主題の範囲はこの点について限定されない。別の態様では、いくつかのワイヤレス送信機は、それらのワイヤレス送信機のロケーションをブロードキャストし、そのようなロケーション情報は移動局200の1つまたは複数のデータベースに記憶され得る。
【0023】
さらに、追加の態様では、マップ記憶領域230は、たとえば、場合によっては位置サーバ170に記憶された、より大きいマップデータベースのサブセットを記憶していることがある。一態様では、ロケーションサーバ170などのネットワークエンティティは、将来のナビゲーション動作をサポートするために複数のマップのうちのどれが移動局200によって要求される可能性があるかを判断し得、そのようなマップの1つまたは複数は移動局200に供給され得る。さらなる態様では、ロケーションサーバ170は、特定のマップを識別するロケーションコンテキスト識別子を含む要求を移動局200から受信したことに少なくとも部分的に応答して、移動局200にマップを供給し得る。もちろん、請求する主題はこれらの点について範囲を限定されない。また、ルート判断は、たとえば、ロケーションサーバ170などのネットワークエンティティによって実行され得る。一態様では、移動局200は、移動局200が遷移POIに到着したことに少なくとも部分的に応答して、ロケーションサーバ170にルート要求を送信し得る。「遷移POI」は、LCIに関係する情報をもつPOIを含み得、ロケーションサーバ170は移動局200にルーティングソリューションを戻し得る。この場合も、請求する主題の範囲はこれらの点について限定されない。
【0024】
図3は、1つまたは複数のワイヤレス通信ネットワーク332および334を介して、およびインターネット340を介していくつかの移動局200および324と通信している例示的な基地局アルマナックサーバ350を示す図である。この例では、移動局200は、パケット交換ワイヤレスローカルエリアネットワーク(WLAN)332とセルラーネットワーク334の両方との通信をサポートし得るマルチモードデバイスを表す。もちろん、これらはマルチモードデバイスが通信し得るワイヤレス通信ネットワークのタイプの例にすぎず、請求する主題の範囲はこの点について限定されない。またこの例では、移動局324は、セルラーネットワーク334との通信をサポートし得るシングルモードデバイスを表す。この場合も、セルラーネットワークは、移動局が通信を確立し得るワイヤレス通信ネットワークの一例にすぎない。
【0025】
図3は、移動局200および324が監視し得るいくつかの送信機タイプ310をさらに示している。移動局200および324は、様々な送信機タイプから送信された信号を監視することが可能になるために、様々なそれぞれの送信機タイプに関連する任意の所与のネットワークにサブスクライブされてもまたはサブスクライブされなくてもよい。したがって、移動局に供給されるBSA情報は、移動局がサブスクライブされていないネットワークに関連する情報を含んでもまたは含まなくてもよい。移動局は、BSA情報について要求を行う場合、特定のネットワークまたは特定の送信機タイプを指定し得る。図3の例では、移動局200および324は、BSAデータベースのうちの少なくともサブセットを含むBSA情報をBSAサーバ350に要求し得る。
【0026】
別の態様では、BSAサーバ350は、外部BSAソース360からBSAデータベースを取得し得る。たとえば、セルラーネットワークプロバイダは、BSA情報をBSAサーバ350に展開または供給するためにサードパーティと契約を結び得る。さらに、一態様では、BSAサーバ350は、ナビゲーション動作のために1つまたは複数の移動局によって使用されるべき1つまたは複数のマップを記憶し得、別の態様では、そのようなマップは外部ソースによって供給され得る。BSA情報またはマップ情報のうちの少なくともサブセットは最終的に移動局200または324に送信され得る。図3の例は2つの移動局を示しているが、実際には、様々な潜在的なネットワークタイプと通信するために、広範囲の異なる機能または記憶能力を示す多種多様な移動局タイプが利用され得る。さらに、移動局は、広範囲の異なる使用パターンを示し得る。したがって、個々の移動局が必要とするかまたは要求し得るマップ情報またはBSA情報のうちの個別化されたサブセットをBSAサーバ350または別のネットワークエンティティが提供することが有利であり得、さらに、指定され得るパラメータのほんの少しの例を挙げれば、指定されたファイルサイズ、カバレージエリア、または送信機タイプに従って、フレキシブルな方法でフォーマッティングされたそのような情報を提供することが有利であり得る。一態様では、これらのパラメータは移動局によって指定され得る。
【0027】
図4は、例示的な屋外エリアを示すマップ400の図である。一例では、図4に示す屋外エリアは、上記で説明した移動局200など、移動局によって実行され得るナビゲーション動作のための特定のコンテキストを表す。図4の例では、移動局200のユーザが空港402に到着したと仮定され得る。移動局200が空港402に位置することが推定されるという判断に応答して、図4に示す屋外エリアに関連付けられたマップ400が移動局200に送信され得る。代替的に、図4に示す屋外エリアに関連付けられたマップ400がすでに移動局200に存在する場合、移動局200は、ナビゲーション動作のためにマップ400を選択し、マップ記憶領域230からマップ400を検索し得る。マップ400を利用して、移動局200は空港402から、一例ではオフィスビル500の入口を表し得る、当該ポイント510へのルートを判断し得る。本例では、移動局200のユーザは、商用で旅行中であり、当該ポイント510に位置するオフィスビル中にいる個人を訪問することを計画していると仮定され得る。ユーザは移動局200上でナビゲーション動作を開始し得、そのナビゲーション動作の開始に応答して、移動局200は空港402からPOI510へのルートを判断し得る。本例では、判断されたルートは経路415によって表され得、その経路415によって、ユーザは、街路404に沿って南に移動し、街路453に沿って東に移動し、街路468に沿って北に移動し、街路455に沿って東に移動し、POI510に位置するオフィスビルの入口に進むように指示され得る。もちろん、これは、例示的なルートと例示的なマップとにすぎず、請求する主題はこれらの点について範囲を限定されない。
【0028】
図5は、図4に示すマップ400のズームインされた部分を示す図である。より詳細には、図5は、街路455と街路468との交差点の近くにあるオフィスビル500の近傍のエリアにおけるマップ400の一部分を示す。経路415は、一例ではSPS座標(42.88,-71.55,321)に位置し得るPOI510に通じるものとして示されている。もちろん、これらは例示的な座標にすぎず、請求する主題の範囲はこの点について限定されない。一例では、ユーザは、移動局200を、本例ではPOI510を表すオフィスビル500の入口に携行し得る。一態様では、移動局200が時間とともに移動するにつれて、場合によっては周期的に、いくつかの位置フィックスが実行され得る。さらなる態様では、移動局200は、たとえば、1つまたは複数のSPS信号、あるいは1つまたは複数のWi-Fi信号に少なくとも部分的に基づいて移動局200のロケーションを周期的に判断し得る。さらに、一態様では、移動局200は、1つまたは複数のSPSまたはWi-Fi信号に基づいて少なくとも部分的に判断された以前のナビゲーションソリューションに基づいて移動局200の推定された位置を断続的または周期的に更新するために、移動局200中の1つまたは複数のIMUセンサ279を利用してデッドレコニングナビゲーション動作を実行し得る。
【0029】
移動局200がPOI510に到着したという判断に少なくとも部分的に応答して、移動局は、POI510に関連付けられたロケーションコンテキスト識別子(LCI)によって識別されるマップを選択し得る。POI510に関連付けられたLCIは、一態様では、追加のマップへのポインタを含むか、または場合によっては追加のマップを識別し得る。本例では、POI510に関連付けられたLCIによって識別されるマップは、オフィスビル500内の屋内エリアに関係する情報を含み得る。このようにして、ユーザがオフィスビル500に入ったとき、移動局200内でコンテキストスイッチが発生し得、それによって、ユーザによる介入を必要とすることなしにナビゲーション機能のために新しいマップが利用可能になり得る。
【0030】
図4および図5の例は、移動局が屋外エリアから屋内エリアに携行されている状況を示している。ただし、請求する主題はこの点について限定されず、マップを識別するLCIを含むPOIに移動局200が到着したという判断に応答して1つまたは複数のマップを選択することを含むマップ変化は、2つの異なる屋外エリアマップの間、2つの異なる屋内エリアマップの間、屋内エリアマップから屋外エリアマップへの間、または屋外エリアマップから屋内エリアマップへの間に生じ得る。さらに、請求する主題は、ナビゲーション動作のために利用され得るマップの特定のタイプに限定されない。たとえば、図4に示すマップなど、比較的大きいエリアをカバーする屋外マップでは、たとえば、比較的低い詳細レベルであるが比較的大きいエリアをカバーするマップが有利に利用され得る。別の例では、たとえば、図5に示すマップなど、より小さいエリアをカバーする屋外マップでは、より大きい詳細量が含まれ得る。
【0031】
同様に、屋内エリアについて、請求する主題はマップの特定のタイプに限定されない。以下で、具体的な例について説明する。ただし、上記のように、請求する主題の範囲はこの点について限定されない。1つまたは複数のマップによって表される屋内エリアは、サイズが大きく異なるか、あるいは屋内空間のタイプまたは目的によって大きく異なり得る。たとえば、ショッピングモールのメインエリア、または屋内フットボールスタジアム、または飛行機ハンガー、または他の同様の建造物は大型から極大型の内部を有し得る。別の例は食料雑貨店を含み得る。移動局は、ユーザによって指定された食料雑貨品目のリストを記憶し得、移動局は、店の位置を特定するために本明細書で説明する1つまたは複数の例示的なナビゲーション技法を利用し得る。さらに、移動局は、ユーザによって指定された品目までの食料雑貨店内のルートを判断し得る。そのような比較的大きい屋内エリアを通る経路を判断するためのナビゲーション技法は、より小さい屋内エリアに対してより適し得る技法とは異なり得る。いくつかの比較的大きい屋内エリアでは、ナビゲーションルーティング技法は、一態様では、屋外エリアのために使用される技法と同様であり得る。いくつかの極めて小さい屋内エリアでは、最終目的地へのルートを発見するためのどんなソリューションもユーザには直ちに明らかであり得るので、単にユーザを屋内空間の入口に導くことだけで十分であり得る。たとえば、ユーザがオフィスビル中の10フィート×10フィートの小会議室の入口に導かれた場合、ユーザは、どのように部屋に入室するかまたはその部屋を横断すべきかに関する命令を受け取る必要がないことがある。代替的に、比較的小さい部屋では、ナビゲーションソリューションは、小部屋の入口から目的ポイントへの直接経路を示すルートを提供し得る。図6および図7に関して説明する以下の例では、異なるサイズの屋内エリアに適切であり得るナビゲーションルーティングのいくつかの追加の例示的なタイプについて説明する。まとめると、開始ポイントから目的ポイントへの経路を判断するための様々な例示的な技法は、移動局ナビゲーションのためのスケーラブルルーティングのための例示的なシステムを提供する。当該ポイントに関連付けられたロケーションコンテキスト識別子によって判断された適切なマップを選択することによって、多種多様な状況に適したナビゲーションソリューションがユーザにとって利用可能になり得る。
【0032】
図6に、例示的なオフィスビル500の一部分の例示的なフロアプラン600を示す。移動局200は、POI510に、オフィスビル500の入口に位置するものとして示されていることに留意されたい。一例では、移動局200のユーザは、目的ポイントを指定する移動局200のプロセッサ260によって実行されるナビゲーションエージェントへの入力を与え得る。一態様では、ユーザは、オフィスビル500内の特定の会議を指定し得、その会議の入口はこの例では目的ポイント632と標示されている。また一態様では、移動局200はPOI510から目的ポイント632への適切な経路を判断し得、移動局200は、フロアプラン600のグラフ表示および判断された経路の表示を介してユーザにナビゲーションソリューションを提示し得る。
【0033】
一態様では、建築物内ルーティングの例示的な技法では、フロアプラン600などのフロアプランは、指定された目的地への適切な経路を判断するためにナビゲーションシステムによって使用され得るルーティンググラフに変換され得る。一態様では、建築物500などの建築物の屋内レイアウトのコンピュータ支援設計(CAD)表現が定義またはマークされ得る。レイアウトの例示的な定義では、廊下と廊下交差点とが定義およびマークされ得る。さらなる態様では、ルーティンググラフの交点が建築物の廊下交差点を表す、ルーティンググラフのグラフ図が生成され得る。図6の例では、廊下交差点620がマークされる。交点に対応する廊下交差点が廊下によって接続される場合、それらの交点はエッジによって接続され得る。図6の例では、エッジ640がマークされる。一態様では、ルーティンググラフ中の交点はロケーション情報を含み得る。一例では、そのようなロケーション情報は(x,y)座標ならびにフロア情報を含み得る。もちろん、請求する主題はこの点について限定されない。さらなる態様では、エッジには、交差点間の距離に少なくとも部分的に基づいて重みが割り当てられ得る。交点およびエッジの作成および定義に対するそのような手法は、いくつかの利点を有し得る、複雑さが低減されたルーティンググラフを提供し得る。意図された利点は、たとえば、ルーティンググラフを通る目的ポイントへの経路を判断する際に利用される、マップについての記憶要件の低減、およびコンピューティングリソースの低減を含み得る。さらなる態様では、グラフの複雑さをさらに低減するために、建築物内の部屋はルーティンググラフ中に表されないことがある。フロアプラン600に示すものなど、他の例では、部屋の入口ポイントが定義され得る。たとえば、フロアプラン600は屋内エリア入口ポイント630を示している。部屋は屋内エリアの一例にすぎない。
【0034】
また、フロアプラン600には当該ポイント610が示されている。特定の当該ポイント510、614、および616が示されている。POI510については上記で説明しており、さらに以下で説明する。フロアプラン600では、当該ポイント614はエレベータの入口に位置し、当該ポイント616は階段吹き抜けに位置する。一例では、POI614および616は、それぞれのマップを識別するロケーションコンテキスト識別子を含み得る。たとえば、移動局200のユーザが移動局200を当該ポイント614まで歩いて運ぶ場合、移動局200がPOI614に到着したと判断されると、POI614に関連付けられたLCIによって識別されるマップが、後続のナビゲーション動作において使用するために移動局200によって選択され得る。POI614に関連付けられたLCIによって識別されるマップが移動局200のマップ記憶領域230に現在記憶されていない場合、そのマップは、一例では、ロケーションサーバ170または別のネットワークエンティティによって検索され得る。さらなる態様では、POI614に関連付けられたLCIは2つ以上のマップを識別し得る。たとえば、移動局200のユーザがエレベータの入口に到着した場合、ユーザが建築物のどのフロアを訪問しようとしているのかがわからないことがある。したがって、移動局200は、ユーザが移動し得る可能なフロアの各々のマップを移動局200が利用できるようにすることが有利であり得る。別の例では、ユーザが特定のフロアのエレベータを出たとき、ユーザが建築物中のそのポイントにおけるPOIに到達するにつれてマップスイッチが行われ得、移動局がその特定のフロアとその特定のPOIとに到達することに基づいて、適切なマップが選択され得る。もちろん、これらは当該ポイントがどのように定義または使用され得るかの例にすぎず、請求する主題の範囲はこれらの点について限定されない。
【0035】
図6に戻ると、ユーザは、ポイント632をナビゲーション動作の目的ポイントとして指定し得る。ユーザはPOI510から目的ポイント632への最短ルートを知ることを望み得る。図6に示すように、廊下交差点620が示されており、それらの廊下交差点を接続するエッジ640が示されている。図6では、経路はPOI510から目的ポイント632に通じるものとして示されている。移動局200は、廊下交差点620のロケーションと、一例では廊下交差点を接続する個々のエッジに割り当てられた重み付け値によって表される、それらのロケーション間の距離とを分析することに少なくとも部分的によって、目的ポイント632への最短経路を判断し得る。図6に示す例では、エッジ641と、廊下交差点621と、エッジ642と、廊下交差点622と、エッジ643と、廊下交差点623と、エッジ644と、廊下交差点624と、エッジ645とを含み、目的ポイント632において終了する経路が判断される。ソリューション経路の一部として利用されないエッジは破線セグメントとして示されており、太線セグメントとして示されたエッジは、判断されたソリューション経路の部分を含む。もちろん、図6に示し上記で説明した例は、屋内エリアにおける移動局のためのルーティングナビゲーションソリューションのための例示的な技法にすぎない。請求する主題はこれらの点について範囲を限定されない。さらに、フロアプラン600は一例にすぎず、他の屋内エリアはより複雑であり得る。本明細書で説明する例示的な技法は、たとえば、ショッピングモール、オフィスビル、病院など、大きい屋内空間のためのルーティンググラフおよびナビゲーションソリューションを生成するために利用され得る。
【0036】
図6に関して上記で説明した例示的な技法は、比較的大きい屋内エリアまたは建築物内ナビゲーションルーティングのために有利に使用され得るが、空間内(intra-room)ルーティングのために他の例示的な技法が利用され得る。上記で説明した例示的な建築物内技法は、2部ルーティングシステムを達成するために様々な例示的な空間内技法とともに利用され得る。一態様では、ルーティングプロセスは、1)たとえば、上記で説明したようにルーティング交点および重み付けされたエッジを使用した、建築物内ルーティング、ならびに2)空間内ルーティングという、2つの別個のセグメントに区分され得る。例示的な2部ルーティング技法は建築物内ルーティングの複雑さを低減し得る。さらに、部屋はしばしば家具または仮設壁などの障害物を含んでいることがあり、これらの潜在的な障害物はルーティンググラフ中に表すことが困難なことがある。また、そのような潜在的な障害物は比較的頻繁に変化し、ルーティンググラフを最新に保つことをより困難にさせ得る。そのような問題に対して少なくとも部分的に対処するために、一態様では、例示的な空間内ルーティング技法が利用され得る。このようにして、比較的複雑な屋内空間または部屋をもつ比較的大きい建築物でさえエンドツーエンドにルーティングされ得る。
【0037】
空間内ルーティングのための例示的な技法は、前に説明したシンプルライン技法を含む。シンプルラインベースルーティング技法は、比較的小さい部屋か、または効率的なルーティングを可能にするのにはユーザの直観で十分であり得る部屋において使用され得る。そのような部屋の一例は、内部に限られた家具または障害物がある単純な事務室または小さい会議室を含み得る。例示的な実装形態では、屋内エリア入口ポイントから目的ポイントへの経路を判断することは、屋内エリア入口ポイントから目的ポイントへのラインをプロットすることを含むが、請求する主題はこの点において範囲を限定されない。
【0038】
図7は、上記で説明した単純なより小さい部屋よりも比較的大きくあり得る部屋において有利に利用され得る例示的な迷路ベースのルーティング技法を示す図である。より大きい部屋は、個室、または机の列など、複数の障害物を含んでいることがある。ユーザはそのような部屋の中を移動するための支援を望み得る。図7に示すように、部屋700の図は、グリッドに、または複数の方形エリアを含むグリッドに区分され得る。もちろん、この例示的な技法では方形を記載しているが、請求する主題はそのように限定されない。障害物を含んでいるグリッドのエリアを、障害エリア701を含むものとしてマークすることに少なくとも部分的によって、迷路マップが生成され得る。一例では、障害エリアは、横断することが困難であり得るかまたは通り抜け不可能であり得るエリアを含み得る。障害物を有しないグリッドのエリアはブランクのままにされ得る。そのようなエリアは、図7では非障害エリア702と標示されている。このように部屋が定義されると、屋内エリア入口ポイント710から目的ポイント720への経路715がルーティングされ得る。このようにして、複雑な部屋でも、よく知られている迷路横断ベースの経路発見アルゴリズムを使用して経路がルーティングされ得る。
【0039】
図8は、移動局ナビゲーションのためのスケーラブルルーティングのための例示的な技法の流れ図である。ブロック810において、移動局の位置を推定し得る。ブロック820において、第1のマップ上で移動局の推定された位置に最も近い、指定量までの当該ポイントを識別し得る。ブロック830において、第2のマップを選択し得る。第2のマップは、複数の当該ポイントのうちの第1の当該ポイントに関連付けられたロケーションコンテキスト識別子によって識別され得る。ブロック840において、第1のマップと第2のマップとを使用して移動局の推定された位置から目的ポイントへのルートを判断し得る。一態様では、第1のマップは屋外エリアのマップを含み得、第2のマップは屋内エリアのマップを含み得るが、請求する主題の範囲はこの点について限定されない。さらなる態様では、目的ポイントから屋外に通じる1つまたは複数の当該ポイントを識別し得る。
【0040】
さらなる態様では、第2のマップ上の第2の当該ポイントを識別し得、その第2の当該ポイントの識別に少なくとも部分的に応答して、後続のナビゲーション動作において移動局が使用するために第2の当該ポイントに関連付けられた第2のロケーションコンテキスト識別子によって識別される第3のマップを選択し得る。さらに、一態様では、他のロケーションコンテキスト識別子に通じる追加の当該ポイントを識別し続け得、他のロケーションコンテキスト識別子によって識別される追加のマップを選択し続け得、移動局の推定された位置から目的ポイントへの最終ルーティングソリューションが判断されるまで潜在的なルートを分析し続け得る。
【0041】
さらなる態様では、第1のマップに少なくとも部分的に基づく第1のエリアのグラフ図を表示し得、第1のマップにおいて1つまたは複数のロケーションコンテキスト識別子に個々に関連付けられた第1の複数の当該ポイントを表示し得る。一態様では、第1の複数の当該ポイントは、ユーザに対して表示され得る視覚マーカーを個々に含み得る。さらなる態様では、複数の第1の当該ポイントに関連付けられた1つまたは複数のロケーションコンテキスト識別子は、それぞれの1つまたは複数のマップへの1つまたは複数のポインタを個々に含み得る。ただし、この場合も、請求する主題の範囲はこの点について限定されない。請求する主題による例は、ブロック810およびブロック820のすべて、それら未満、またはそれら以上を含み得る。さらに、ブロック810およびブロック820の順序は例示的な順序にすぎず、請求する主題の範囲はこの点について限定されない。
【0042】
図9は、開始POIから目的POIへのルートを判断するための例示的なプロセスを示す流れ図である。ブロック910において、開始当該ポイントを確定するために移動局の位置の推定値を推定し得る。ブロック920において、開始POIのロケーションコンテキスト識別子と、目的POIのロケーションコンテキスト識別子とを識別し得る。ブロック930において、開始POIと目的POIとのLCIが複数のシナリオのうちのどれに対応するかに関する判断を行い得る。一態様では、開始POIと目的POIとのLCIは、それぞれ、以下のシナリオ、すなわち、1)屋外エリア、屋外エリア、2)屋内エリア、屋外エリア、3)屋外エリア、屋内エリア、または4)屋内エリア、屋内エリアのうちの1つに対応し得る。さらに、ブロック940において、判断されたシナリオに適した技法を使用して開始POIから目的POIへのルートを判断し得る。もちろん、図9に示すプロセスは一例にすぎず、請求する主題の範囲はこれらの点について限定されない。さらに、上記の例示的なシナリオに従って利用され得る例示的な技法について以下で説明する。
【0043】
図10は、屋外エリア1010と屋外エリア1020とを含む例示的なルーティングシナリオを示す図である。図10の例示的なシナリオは、上記で説明したシナリオ1に対応する。一態様では、開始当該ポイント1015と目的当該ポイント1025とが屋外エリア中にある図10に示すシナリオなどのシナリオでは、開始POI1015と目的POI1025との間のルートは、たとえば、以下で説明する屋内エリアから屋外エリアへの遷移を含み得るルーティングシナリオにおいて発見し得るような出口に位置する当該ポイントを顧慮せずに判断され得る。一態様では、屋外エリア1010および1020は、別々のマップを含み得、または、別の態様では、単一のマップを含み得る。さらに、屋外エリアに関与する少なくともいくつかのシナリオでは、エリア1010とエリア1020との間に追加の中間的屋外エリアが位置し得る。そのような場合、ルートを判断するために、ナビゲーション動作中に、中間的屋外エリアに対応する1つまたは複数の追加のマップが識別され、利用され得る。もちろん、図10に示すシナリオは一例にすぎず、請求する主題の範囲はこれらの点について限定されない。
【0044】
図11は、屋内エリア1110と屋外エリア1120とを含む例示的なルーティングシナリオを示す図である。図11に示す例示的なシナリオは、上記で説明した例示的なシナリオ2に対応する。図11に示す例では、開始POI1115は屋内エリア1110中にあり得、目的POI1125は屋外エリア1120中にあり得る。また、図11には、屋内エリア1110から屋外エリア1120に通じる出口に位置する当該ポイント1130、1140、および1150が示されている。POI1130、1140、および1150は「出口POI」と呼ばれることがある。図11に示す例示的なシナリオでは、例示的なルーティングプロセスは、開始POI1115から出口POI1130、1140、および1150への可能なルートを判断し得る。例示的な可能なルート1101、1102、および1103が図11に示されている。さらに、出口POI1130、1140、および1150から目的POI1125への可能なルートが判断され得、ルート1104、1105、および1106と標示されている。可能なルートを判断する際に、個々の可能なルートについて「コスト値」が判断され得る。一態様では、コスト値は、たとえば、距離、時間、または何らかの他の重み付け値を含み得るが、請求する主題の範囲はこの点について限定されない。コスト値は、開始POI1115から目的POI1125への最終ルートを少なくとも部分的に判断するための基礎を与え得る。最終ルート選択は、ほんのいくつかの考えられる例を挙げれば、開始から目的地への最短距離に少なくとも部分的に基づくか、または開始から目的地への推定移動時間に少なくとも部分的に基づき得る。図11に示す例では、可能なルート1101および1104を含むルートが最短最終ルートを含み得る。もちろん、図11に示すシナリオは一例にすぎず、請求する主題の範囲はこれらの点について限定されない。
【0045】
図12は、屋外エリア1210と屋内エリア1220とを含む例示的なルーティングシナリオを示す図である。図12に示す例示的なシナリオは、上記で説明した例示的なシナリオ3に対応する。一態様では、開始POI1215は屋外エリア1210中にあり得、目的POI1225は屋内エリア1220中にあり得る。出口POI1230および1240は、一例では、屋内エリア1220と屋外エリア1210との間の境界に位置し得る。一態様では、例示的な本シナリオでは、図12に示すように、目的POI1225から出口POI1230および1240への可能なルートが判断され得る。目的POI1225から出口POI1230および1240への可能なルートはそれぞれ1203および1204と標示されている。さらなる態様では、開始POI1215から出口POI1230および1240への可能なルートが判断され得、図12ではルート1201および1202と標示されている。開始POI1215から目的POI1225への最終ルート選択は、以前に判断された可能なルートに関連付けられたコスト値に少なくとも部分的に基づき得る。最終ルートは、ほんのいくつかの考えられる例を挙げれば、開始から目的地への最短距離、または開始から目的地への推定移動時間に少なくとも部分的に基づいて判断され得る。図12に示す例では、可能なルート1201および1203を含むルートが最短最終ルートを含み得る。もちろん、図12に示すシナリオは一例にすぎず、請求する主題の範囲はこれらの点について限定されない。
【0046】
図13は、屋外エリアによって分離された2つの屋内エリアを含む例示的なルーティングシナリオを示す図である。図13に示す例示的なシナリオは、上記で説明した例示的なシナリオ4の特殊な場合に対応する。一態様では、開始POI1315と目的POI1325とは1つまたは複数の屋内エリア中にあり得る。図13の例示的なシナリオでは、開始POI1315は屋内エリア1310中にあり得、目的POI1325は屋内エリア1320中にあり得る。一態様では、屋外エリア1330は、屋内エリア1310と屋内エリア1320との間に位置し得る。別の態様では、開始POI1315と目的POI1325との間のルートを判断するために、開始POI1315から、図13では出口POI1340および1350として示されている屋内エリア1310の出口点への可能なルートが判断され得る。さらに、目的POI1325から、図13では出口POI1360および1370として示されている屋内エリア1320の出口点への可能なルートが判断され得る。さらに、出口POI1340および1350を出口POI1360および1370に接続するルートが判断され得る。開始POI1315から目的POI1325への最終ルートは、たとえば、最低コスト経路を判断することに少なくとも部分的によって判断され得る。図13に示す例では、可能なルート1301、1305、および1303を含むルートが最短最終ルートを含み得る。もちろん、図13に示すシナリオは一例にすぎず、請求する主題の範囲はこれらの点について限定されない。
【0047】
さらなる態様では、開始ポイントと目的ポイントとがそれぞれ屋内エリア中にある図13に関して上記で説明したルーティングプロセスなどの例示的なルーティングプロセスでは、開始ポイントと目的ポイントとが同じ屋内エリア中にあり得るという可能性が存在する。上記で説明したように、開始POIと目的POIの両方が屋内エリア中にある例示的なルーティングシナリオでは、例示的なルーティングプロセスは、開始POIから開始POI屋内エリアの出口への可能な経路を判断することを含み得、また、目的POIから目的POI屋内エリアの出口への可能な経路を判断することを含み得る。目的POIから目的POI屋内エリアの出口への可能なルートを判断する際に、開始POIから開始POI屋内エリアの出口への以前に判断されたルートに沿って位置する当該ポイントのLCIに一致するLCIを有する1つまたは複数の当該ポイントを通過する可能なルートが判断され得る。LCIのそのような一致を発見すると、開始POIと目的POIとが同じ屋内エリア中にあると判断され得る。屋内エリアは1つまたは複数のフロアを含み得ることと、開始POIまたは目的POIから出口POIへの可能なルートを判断することは、屋内機構を示し得る1つまたは複数の中間当該ポイントを通る可能な経路を分析することを含み得ることとに留意されたい。当該ポイントとしてマップ上またはマップ中に表され得るマップ上の屋内機構は、たとえば、階段、エレベータ、エスカレータ、動く歩道、屋内出入口などを含み得る。もちろん、これらは例にすぎず、請求する主題の範囲はこの点について限定されない。
【0048】
図14は、建築物1410中の開始当該ポイント1415から屋外エリア1430を通って建築物1420中の目的当該ポイント1425に至る例示的な最低コストルート1402を示す図である。また、建築物1410および1420の出口当該点を含む、当該ポイント1440が図14に示されている。一態様では、最良の経路を判断するために利用され得る例示的なルーティングプロセスは、図13に関して上記で説明した例示的なプロセスに対応し得る。図13の例示的なシナリオの場合と同様に、図14の例は、上記で説明した例示的なシナリオ4に対応する、屋内エリア中にある開始POIと目的POIとを含む。一態様では、例示的なルーティングプロセスは、開始POI1415から建築物1410の出口POIへの可能なルートを判断することを含み得る。例示的な建築物1410はエレベータ1414および階段1412を含むことと、可能な経路はそれらの屋内機構を利用し得ることとに留意されたい。屋内機構は、ルートを判断する際に利用され得るコスト値を有し得る。もちろん、他の例示的な建築物は、たとえば、エスカレータ、動く歩道、屋内出入口など、他のタイプの屋内機構を含み得る。さらなる態様では、目的POI1425から建築物1420の出口POIへの可能なルートが判断され得る。建築物1420は階段1422およびエレベータ1424を含むが、この場合も、他の例示的な建築物は他のタイプの屋内機構を含み得る。さらに、建築物1410および1420は3つのフロアを含むが、請求する主題の範囲はこの点について限定されない。
【0049】
さらなる態様では、建築物1410の出口POIから建築物1420の出口POIへの可能なルートが判断され得る。上記で説明したように、可能なルートはコスト値に個々に関連付けられ得る。各建築物が3つの出口POIを含む状況では、9つの可能なルートが判断され得る。最低コストルート1402を判断するために、建築物1410と建築物1420との間のこれらの可能な経路は、開始POI1415から建築物1410の出口POIへの以前に判断された可能なルートとともに、および目的POI1425から建築物1420の出口POIへの以前に判断された可能なルートとともに分析され得る。
【0050】
前に説明した他の例の場合と同様に、図14に示すルーティング例はグラフ構造として示され得る。前に説明した例の場合と同様に、ルーティングソリューションは1つまたは複数のグラフを利用し得る。図14の例では、建築物1410および1420の各フロアは、たとえば、図6または図7に示すものなど、グラフ構造として示され得る。図6の例の場合と同様に、建築物1410および1420の各フロアは、廊下交差点と、廊下交差点または当該ポイントを接続するエッジとを含むグラフ構造によって表され得る。上述のように、エッジは重み付け値を有し得る。重み付け値は、少なくとも部分的に、可能なルートのコスト値を判断するために使用され得る。同様に、建築物1410の出口ポイントと建築物1420の出口ポイントとの間の屋外経路は、たとえば、グラフ構造として表され得る。ただし、図14に関して説明するグラフ構造は例示的なルーティング技法にすぎず、請求する主題の範囲はこれらの点について限定されない。
【0051】
本明細書で説明する方法は、特定の例に従って適用例に応じて様々な手段によって実装され得る。たとえば、そのような方法は、ハードウェア、ファームウェア、ソフトウェア、および/またはそれらの組合せで実装され得る。ハードウェア実装の場合、たとえば、処理ユニットは、1つまたは複数の特定用途向け集積回路(ASIC)、デジタル信号プロセッサ(DSP)、デジタル信号処理デバイス(DSP)、プログラマブル論理デバイス(PLD)、フィールドプログラマブルゲートアレイ(FPGA)、プロセッサ、コントローラ、マイクロコントローラ、マイクロプロセッサ、電子デバイス、本明細書で説明する機能を実行するように設計された他のデバイスユニット、および/またはそれらの組合せの中で実装され得る。
【0052】
本明細書で言及する「命令」は、1つまたは複数の論理演算を表す表現に関係する。たとえば、命令は、1つまたは複数のデータオブジェクトに対して1つまたは複数の演算を実行するために機械によって解釈可能であることによって「機械可読」であり得る。ただし、これは命令の一例にすぎず、請求する主題はこの点について限定されない。別の例では、本明細書で言及する命令は、符号化コマンドを含むコマンドセットを有する処理回路によって実行可能である符号化コマンドに関係し得る。そのような命令は、処理回路によって理解される機械語の形態で符号化され得る。この場合も、これらは命令の例にすぎず、請求する主題はこの点について限定されない。
【0053】
本明細書で言及する「記憶媒体」は、1つまたは複数の機械によって知覚可能な表現を維持することが可能な媒体に関係する。たとえば、記憶媒体は、機械可読命令および/または情報を記憶するための1つまたは複数の記憶デバイスを含み得る。そのような記憶デバイスは、たとえば、磁気、光学または半導体記憶媒体を含む、いくつかの媒体タイプのうちのいずれか1つを含み得る。そのような記憶デバイスはまた、任意のタイプの長期、短期、揮発性または非揮発性メモリデバイスを含み得る。ただし、これらは記憶媒体の例にすぎず、請求する主題はこれらの点について限定されない。
【0054】
本明細書で説明するワイヤレス通信技法は、ワイヤレスワイドエリアネットワーク(WWAN)、ワイヤレスローカルエリアネットワーク(WLAN)、ワイヤレスパーソナルエリアネットワーク(WPAN)など、様々なワイヤレス通信ネットワークに関連し得る。「ネットワーク」および「システム」という用語は、本明細書では互換的に使用され得る。WWANは、符号分割多元接続(CDMA)ネットワーク、時分割多元接続(TDMA)ネットワーク、周波数分割多元接続(FDMA)ネットワーク、直交周波数分割多元接続(OFDMA)ネットワーク、シングルキャリア周波数分割多元接続(SC-FDMA)ネットワーク、または上記のネットワークの任意の組合せなどであり得る。CDMAネットワークは、ほんのいくつかの無線技術を挙げれば、cdma2000、広帯域CDMA(W-CDMA)など、1つまたは複数の無線アクセス技術(RAT)を実装し得る。この場合、cdma2000は、IS-95規格、IS-2000規格、およびIS-856規格に従って実装される技術を含み得る。TDMAネットワークは、Global System for Mobile Communications(GSM(登録商標))、Digital Advanced Mobile Phone System(D-AMPS)、または何らかの他のRATを実装し得る。GSM(登録商標)およびW-CDMAは、「3rd Generation Partnership Project」(3GPP)と称する団体からの文書に記載されている。cdma2000は、「3rd Generation Partnership Project 2」(3GPP2)と称する団体からの文書に記載されている。3GPPおよび3GPP2の文書は公に入手可能である。たとえば、WLANはIEEE802.11xネットワークを含み得、WPANは、Bluetooth(登録商標)ネットワーク、IEEE802.15xを含み得る。本明細書で説明するワイヤレス通信実装形態はまた、WWAN、WLANおよび/またはWPANの任意の組合せとともに使用され得る。さらに、本明細書で説明するワイヤレス通信は、4Gワイヤレス通信プロトコルに準拠して実行されるワイヤレス通信を含み得る。
【0055】
本明細書で使用する「または」という用語は、その用語が使用されるコンテキストに少なくとも部分的に依存する様々な意味を含み得る。一般に、「または」がA、BまたはCなどのリストを関連付けるために使用された場合、包含的な意味で使用された場合はA、B、およびCを意味し、ならびに排他的な意味で使用された場合はA、BまたはCを意味するものとする。本明細書全体にわたる「一例」または「例」という言及は、例に関して説明する特定の特徴、構造、または特性が、請求する主題の少なくとも1つの例の中に含まれることを意味する。したがって、本明細書全体にわたる様々な箇所における「一例では」または「例」という句の出現は、必ずしもすべてが同じ例を指すわけではない。さらに、それらの特定の特徴、構造、または特性を組み合わせて1つまたは複数の例にし得る。本明細書で説明する例は、デジタル信号を使用して動作する機械、デバイス、エンジン、または装置を含み得る。そのような信号は、ロケーション間で情報を提供する電子信号、光信号、電磁信号、または任意の形態のエネルギーを含み得る。
【0056】
現在例示的な特徴と考えられていることを例示し説明したが、請求する主題を逸脱することなく、様々な他の変更が行われ得、均等物が代用され得ることが、当業者には理解されよう。さらに、本明細書で説明する中心概念から逸脱することなく、請求する主題の教示に特定の状況を適合させるために多くの変更が行われ得る。したがって、請求する主題は、開示する特定の例に限定されず、そのような請求する主題は、添付の特許請求の範囲の範囲内に入るすべての態様、およびそれらの均等物をも含み得るものとする。
【符号の説明】
【0057】
110 SPS
112 SV
114 SV
116 SV
120 ワイヤレス通信ネットワーク
132 ワイヤレス送信機
134 ワイヤレス送信機
136 ワイヤレス送信機
140 モバイル交換センター(MSC)
160 パケットデータサービングノード(PDSN)
170 ロケーションサーバ
170 位置サーバ
180 BSAサーバ
185 BSAデータベース
200 移動局
210 SPS受信機
220 ワイヤレス通信トランシーバ
230 マップ記憶領域
240 基地局アルマナック記憶領域
260 プロセッサ
270 慣性測定ユニット(Inertial Measurement Unit)(IMU)
270 IMU
279 IMUセンサ
310 送信機タイプ
324 移動局
332 パケット交換ワイヤレスローカルエリアネットワーク(WLAN)
334 セルラーネットワーク
340 インターネット
350 基地局アルマナックサーバ
350 BSAサーバ
360 外部BSAソース
400 マップ
402 空港
404 街路
415 経路
453 街路
455 街路
468 街路
500 オフィスビル
500 建築物
510 当該ポイント
510 POI
600 フロアプラン
610 当該ポイント
614 当該ポイント
614 POI
616 当該ポイント
616 POI
620 廊下交差点
621 廊下交差点
622 廊下交差点
623 廊下交差点
624 廊下交差点
630 屋内エリア入口ポイント
632 目的ポイント
632 ポイント
640 エッジ
641 エッジ
642 エッジ
643 エッジ
644 エッジ
645 エッジ
701 障害エリア
702 非障害エリア
710 屋内エリア入口ポイント
715 経路
720 目的ポイント
1010 屋外エリア
1015 開始当該ポイント
1015 開始POI
1020 屋外エリア
1025 目的当該ポイント
1025 目的POI
1101 ルート
1102 ルート
1103 ルート
1104 ルート
1105 ルート
1106 ルート
1110 屋内エリア
1115 開始POI
1120 屋外エリア
1125 目的POI
1130 当該ポイント
1130 POI
1130 出口POI
1140 当該ポイント
1140 POI
1140 出口POI
1150 当該ポイント
1150 POI
1150 出口POI
1201 ルート
1202 ルート
1203 ルート
1204 ルート
1210 屋外エリア
1215 開始POI
1220 屋内エリア
1225 目的POI
1230 出口POI
1240 出口POI
1301 ルート
1303 ルート
1305 ルート
1310 屋内エリア
1315 開始POI
1320 屋内エリア
1325 目的POI
1330 屋外エリア
1340 出口POI
1350 出口POI
1360 出口POI
1370 出口POI
1402 最低コストルート
1410 建築物
1412 階段
1414 エレベータ
1415 開始当該ポイント
1415 開始POI
1420 建築物
1422 階段
1424 エレベータ
1425 目的当該ポイント
1425 目的POI
1430 屋外エリア
1440 当該ポイント
【技術分野】
【0001】
米国特許法第119条に基づく優先権の主張
本出願は、本出願の譲受人に譲渡され、参照により本明細書に組み込まれる、2010年1月14日に出願された「Seamless Pedestrian Navigation Through Multi-Floor, Indoor and Outdoor Contexts」と題する米国仮出願第61/295,089号と、2010年1月14日に出願された「Scalable Routing on Static Points of Interest (POIs)」と題する米国仮出願第61/295,149号との米国特許法第119条に基づく優先権を主張する。
【0002】
本明細書で開示する主題は、ロケーションコンテキスト識別子を使用したスケーラブルルーティングを用いた移動局ナビゲーションに関する。
【背景技術】
【0003】
セルラー電話などの移動局の位置は、様々なシステムから収集された情報に基づいて推定され得る。1つのそのようなシステムは、いくつかの移動局のための通信をサポートするためにいくつかのアクセスポイントを含むワイヤレスローカルアクセスネットワーク(WLAN)通信システムを含み得る。また、移動局の位置を推定するために衛星測位システム(satellite positioning system)(SPS)が利用され得る。移動局のためのナビゲーションソリューションは、移動局の現在の推定された位置に少なくとも部分的に基づき、現在の推定された位置から目的ポイントに経路をルーティングすることを含み得る。ルーティングソリューションは、たとえば、歩行者または運転者が目的ポイントへの経路を移動するのを助けるために移動局上のグラフィカルユーザインターフェース上に表示され得る。しかしながら、たとえば、現在の推定された位置から目的ポイントへのルートが屋内部分と屋外部分とを含む場合、または別の例では、ルートが屋内部分中に複数のフロアを含む場合、困難が生じ得る。
【発明の概要】
【課題を解決するための手段】
【0004】
例示的な実装形態では、方法は、移動局の位置を推定するステップと、第1のマップ上で移動局の推定された位置に最も近い、指定量までの当該ポイントを識別するステップと、識別された当該ポイントのうちの第1の当該ポイントに関連付けられた第1のロケーションコンテキスト識別子によって識別される第2のマップを選択するステップと、第1のマップと第2のマップとを使用して移動局の推定された位置から目的ポイントへのルートを判断するステップとを含み得る。別の例示的な実装形態では、物品は、移動局の位置を推定することと、第1のマップ上で移動局の推定された位置に最も近い、指定量までの当該ポイントを識別することと、識別された当該ポイントのうちの第1の当該ポイントに関連付けられた第1のロケーションコンテキスト識別子によって識別される第2のマップを選択することと、第1のマップと第2のマップとを使用して移動局の推定された位置から目的ポイントへのルートを判断することとを行うための、移動局のプロセッサによって実行可能な命令を記憶した記憶媒体を含み得る。さらなる例示的な実装形態では、移動局は、ナビゲーション動作のために複数のマップを記憶するためのメモリと、プロセッサであって、複数のマップのうちの第1のマップ上で当該ポイントに対応する移動局の推定された位置に最も近い、指定量までの当該ポイントを識別することと、識別された当該ポイントのうちの第1の当該ポイントに関連付けられた第1のロケーションコンテキスト識別子によって識別される複数のマップのうちの第2のマップを選択することと、第1のマップと第2のマップとを使用して移動局の推定された位置から目的ポイントへのルートを判断することとを行うためのプロセッサとを含み得る。追加の例示的な実装形態では、装置は、移動局の位置を推定するための手段と、第1のマップ上で移動局の推定された位置に最も近い、指定量までの当該ポイントを識別するための手段と、識別された当該ポイントのうちの第1の当該ポイントに関連付けられた第1のロケーションコンテキスト識別子によって識別される第2のマップを選択するための手段と、第1のマップと第2のマップとを使用して移動局の推定された位置から目的ポイントへのルートを判断するための手段とを含み得る。
【0005】
以下の図を参照しながら非限定的で非網羅的な例について説明し、様々な図の全体を通して、同様の参照番号は同様の部分を指す。
【図面の簡単な説明】
【0006】
【図1】例示的なワイヤレス通信ネットワークおよび例示的な衛星測位システムと通信している例示的な移動局を示す概略ブロック図である。
【図2】移動局の例示的な実施形態の概略ブロック図である。
【図3】1つまたは複数のワイヤレス通信ネットワークを介していくつかの移動局と通信している例示的なアルマナックサーバを示す図である。
【図4】例示的なナビゲーション経路を含む屋外エリアの例示的なマップを示す図である。
【図5】屋外エリアと屋内エリアとの間の遷移における例示的なナビゲーション経路と当該ポイントとを示す図である。
【図6】例示的な屋内エリアの例示的なフロアプランを示す図である。
【図7】グリッドに区分される例示的な屋内エリアの例示的なフロアプランを示す図である。
【図8】移動局ナビゲーションのためのスケーラブルルーティングのための例示的なプロセスの流れ図である。
【図9】移動局ナビゲーションのためのスケーラブルルーティングのための例示的なプロセスの流れ図である。
【図10】屋外エリアを含む例示的なルーティングシナリオを示す図である。
【図11】屋内エリアと屋外エリアとを含む例示的なルーティングシナリオを示す図である。
【図12】屋外エリアと屋内エリアとを含む例示的なルーティングシナリオを示す図である。
【図13】屋外エリアによって分離された2つの屋内エリアを含む例示的なルーティングシナリオを示す図である。
【図14】建築物中の開始当該ポイントから屋外エリアを通って別の建築物中の目的当該ポイントに至る例示的なルーティング経路を示す図である。
【発明を実施するための形態】
【0007】
上記で説明したように、たとえば、セルラー電話などの移動局の位置は、様々なシステムから収集された情報に基づいて推定され得る。1つのそのようなシステムは、いくつかの移動局のための通信をサポートするためにいくつかのアクセスポイントを含むワイヤレスローカルアクセスネットワーク(WLAN)通信システムを含み得る。また、移動局の位置を推定するために衛星測位システム(SPS)が利用され得る。移動局のためのナビゲーションソリューションは、移動局の現在の推定された位置に少なくとも部分的に基づき、現在の推定された位置から目的ポイントに経路をルーティングすることを含み得る。ルーティングソリューションは、たとえば、歩行者または運転者が目的ポイントへの経路を移動するのを助けるために移動局上のグラフィカルユーザインターフェース上に表示され得る。しかしながら、たとえば、現在の推定された位置から目的ポイントへのルートが屋内部分と屋外部分とを含む場合、困難が生じ得る。さらに、たとえば、屋内部分が複数のフロアを含む場合、困難が生じ得る。
【0008】
移動局の現在の位置から目的ポイントへのルートを移動し得るエンドツーエンドナビゲーションソリューションは、屋外ナビゲーション技法と屋内ナビゲーション技法との統合を必要とし得る。屋内ルーティング技法と屋外ルーティング技法とでは、たとえば、マップスケール、ルーティングアルゴリズム、またはロケーション識別技術が異なり得る。一態様では、例示的なナビゲーション技法では、ユーザは、ナビゲーション動作のために利用され得る1つまたは複数のマップに気づいている必要がないことがあり、ユーザは、マップに変化がある場合、たとえば、ユーザが屋外エリアから屋内エリアに移動するとき、またはユーザが屋内エリア中でフロア間を移動するときにマップに変化がある場合、アクションをとる必要がないことがある。
【0009】
一態様では、1つのナビゲーションマップから別のナビゲーションマップへの遷移は、1つまたは複数のロケーションコンテキスト識別子(location context identifier)(LCI)を個々に含み得る1つまたは複数の当該位置(point of interest)(POI)でマークされたマップを利用するシステムを使用することによって達成され得る。例示的なナビゲーションシステム内の1つまたは複数のマップはLCIに関連付けられ得る。一態様では、マップはLCIによって一意に識別され得る。さらに、建築物のフロアは、それぞれのLCIによって個々に識別される複数のマップから構成され得る。例示的な実装形態では、建築物のフロアはLCIによって完全に識別され得る。さらに、別の態様では、POIは、POIから到達可能であり得る複数のLCIへの参照を含み得る。さらなる態様では、LCIは、汎用一意識別子(universal unique identifier)(UUID)ハッシュアルゴリズムなどを使用して生成され得る。このようにして、第1のマップ上のPOIアノテーションは、1つまたは複数の他の関連するマップへの1つまたは複数の参照を与え得る。一態様では、1つまたは複数のマップは、埋込みLCI情報を含んでいる1つまたは複数のPOIを使用することによって、別のマップにおいて参照され得る。ナビゲーション動作中に、ユーザが埋込みLCI情報を含む当該ポイントのうちの1つに到着した場合、その埋込み情報を利用して後続のマップを検索し得、その後続のマップを使用してルート判断が継続し得る。本明細書で使用する「当該ポイント」という用語は、1つのエリアから別のエリアへの遷移を識別し得るマップ上の任意のポイントに関係する。例示的なPOIは、階段、エレベータ、エスカレータ、動く歩道、外部ドア、建築物の2つの屋内部分を分離する内部ドア、または2つの建築物の間の接続を含み得る。ただし、これらは例示的なPOIにすぎず、請求する主題の範囲はこの点について限定されない。さらに、本明細書で使用する「ロケーションコンテキスト識別子」という用語は、移動局のためのナビゲーション動作において使用され得る1つまたは複数のマップを識別する当該位置に関連付けられた任意の情報に関係する。
【0010】
一態様では、移動局の位置が推定され得る。第1のマップ上の1つまたは複数のPOIのうちのどれが、移動局の推定された位置に最も近いかに関する判断が行われ得る。第1のマップ上のPOIは、当該ポイントに関連付けられた第2のマップを識別するLCIをその中に埋め込んでいることがある。移動局の推定された位置から指定された目的地へのルートを判断するために、ナビゲーション動作において移動局が使用するための第2のマップが選択され得る。一態様では、ルート判断を完了するために、必要に応じて追加のマップが選択され得る。また、さらなる態様では、ルーティング技法は反復的であり得る。1つまたは複数のPOI中に埋め込まれたLCIを使用して複数のマップが検索され得る。たとえば、ユーザが1つの建築物から別の建築物に移動することを望む場合、第1の建築物のマップが検索され、第2の建築物に通じる屋外エリアのマップが検索され、また、第2の建築物の第2のマップが検索され得る。たとえば、最短ルートを判断するために様々な可能なルートが分析され得る。
【0011】
一例では、第1のマップは、ナビゲーション動作を実行するために移動局によって使用され得る。一例では、第1のマップは屋外エリアのマップを含み得る。一態様では、ユーザは移動局を建築物の入口に携行し得る。また一態様では、建築物の入口のロケーションは、第1のマップの一部として記憶された情報に応じた当該ポイントを含み得る。移動局が、この例では、建築物の入口のロケーションに対応する当該ポイントに到着したと検出することの結果として、当該ポイントに関連付けられたロケーションコンテキスト識別子によって識別される第2のマップが検索され得、移動局は、その検索された第2のマップを使用してナビゲーション動作を実行し得る。本例では、第2のマップは、建築物内の屋内空間のうちの少なくとも一部のマップを含み得る。このようにして、ユーザは、移動局によって提供されるナビゲーションソリューションによって入口に案内されながら、移動局を建築物の入口に携行し得、ユーザが特定のアクションを起こすことなしに、移動局は建築物の内部のマップを自動的に検索し得、ユーザが建築物に入ったとき、移動局はナビゲーションソリューションを提供し続け得る。したがって、この例では屋外エリアから屋内エリアに移動することを含む、1つのエリアから別のエリアに横断する際に、ユーザによってシームレスな遷移が経験され得る。もちろん、これらは例示的なナビゲーション動作にすぎず、請求する主題はこれらの点について範囲を限定されない。
【0012】
一態様では、移動局の様々な時点の位置について推定が行われ得る。たとえば、移動局の位置の推定値を判断するために、以下でより十分に説明するように、様々なアクセスポイントまたは他のワイヤレス送信機から受信した信号を使用した、三辺測量、三角測量、またはマルチラテレーション動作が利用され得る。移動局の位置の初期推定値を判断するための追加の技法は、たとえば、初期推定値を概算するために1つまたは複数の衛星測位システム(SPS)信号に基づいて以前に判断されたロケーション推定値を利用することを含み得る。別の例では、以前に推定されたロケーションに基づいて移動局の位置の推定値を判断するために、たとえば、加速度計またはジャイロスコープなど、移動局中のセンサが利用され得る。請求する主題は、移動局の位置の推定値を判断するための特定の技法に限定されないことに留意されたい。
【0013】
図1は、移動局200と通信しているSPS110およびワイヤレス通信ネットワーク120の概略ブロック図である。ワイヤレス通信ネットワーク120は、この例では、たとえば、移動局200を含むいくつかの移動局のためのボイス通信を可能にすることができるセルラー通信ネットワークを含み得、ボイス通信を行うことに加えてさらに移動局の位置推定をサポートし得る。ワイヤレス通信ネットワーク120はいくつかのネットワークタイプのうちのいずれかを含み得、それのいくつかの例について以下で説明する。ワイヤレス通信ネットワーク120は、この例では、たとえば、移動局200など、いくつかのワイヤレス端末のための通信を行うワイヤレス送信機132、134、および136を含む。簡単のために、図1には、ほんのいくつかのワイヤレス送信機132、134、および136を示し、1つの移動局200を示してある。もちろん、他の例は追加の数のワイヤレス送信機を含み得、図1に示すワイヤレス送信機の構成は例示的な構成にすぎない。また、ワイヤレス通信ネットワーク120は例示的なワイヤレス通信システムにすぎず、請求する主題の範囲はこの点について限定されない。
【0014】
本明細書で使用する「ワイヤレス送信機」という用語は、たとえば、セルラーネットワークなど、ワイヤレス通信システムにおいて通信を可能にするために使用される任意のワイヤレス通信局またはデバイスを含むことを意味するが、請求する主題の範囲はこの点について限定されない。セルラーネットワークにおいて利用されるワイヤレス送信機の例示的なタイプは基地局と呼ばれることがある。別の態様では、ワイヤレス送信機は、セルラー電話サービスを企業または自宅に拡張するために利用されるフェムトセルを含み得る。そのような実装形態では、1つまたは複数の移動局は、たとえば、符号分割多元接続(CDMA)セルラー通信プロトコルを介してフェムトセルと通信し得、フェムトセルは、インターネットなどの別のブロードバンドネットワークを介してより大きいセルラー通信ネットワークへの移動局アクセスを与え得る。別の態様では、ワイヤレス送信機は、様々な電子デバイスタイプのうちのいずれかの中に含まれ得る。一態様では、ワイヤレス送信機は、たとえば、ワイヤレスローカルエリアネットワーク(WLAN)アクセスポイントを含み得る。そのようなWLANは、一態様では、IEEE802.11x規格のうちの1つまたは複数と互換性があるネットワークを含み得るが、請求する主題の範囲はこの点について限定されない。さらに、デバイスについて説明する際の「送信機」という用語の使用は、送信することのみにそのデバイスの機能を限定するものではない。たとえば、基地局およびアクセスポイントは、一般に、ワイヤレス信号を送信することと受信することの両方が可能である。
【0015】
本明細書で使用する「移動局(mobile station)」(MS)という用語は、時々位置が変化し得るデバイスを指す。そのような位置の変化は、いくつかの例として、方向、距離、配向などに対する変化を含み得る。特定の例では、移動局は、セルラー電話、ワイヤレス通信デバイス、ユーザ機器、ラップトップコンピュータ、他のパーソナル通信システム(PCS)デバイス、携帯情報端末(PDA)、パーソナルオーディオデバイス(PAD)、ポータブルナビゲーションデバイス、または他のポータブル通信デバイスを含み得る。移動局はまた、機械可読命令によって制御される機能を実行するように適応されたプロセッサまたは計算プラットフォームを含み得る。
【0016】
一態様では、SPS110は、いくつかの宇宙ビークル(space vehicle)(SV)、たとえばSV112、114、および116を含み得る。一例では、SPS110は、GPS、GLONASSおよびGalileoなど、1つまたは複数の衛星測位システムを含み得るが、請求する主題の範囲はこの点について限定されない。1つまたは複数の態様では、移動局200は、SV112、114、および116から信号を受信し、ワイヤレス送信機132、134、および136のうちの1つまたは複数と通信し得る。たとえば、移動局200は、SVまたはワイヤレス送信機のうちの1つまたは複数から受信した1つまたは複数の信号から1つまたは複数の測定値を取得し得る。ただし、いくつかの状況では、SPSからタイミング信号が入手できないことがある。そのような状況では、移動局200は、ワイヤレス送信機132、134、または136のうちの1つまたは複数との通信を通して伝搬遅延情報を収集し得る。移動局200は、ワイヤレス送信機132、134、または136のうちの1つまたは複数との通信を通して受信したタイミング較正パラメータに少なくとも部分的に基づいて、さらにワイヤレス送信機の既知のロケーションに少なくとも部分的に基づいて、移動局の位置を計算し得る。移動局200はまた、ワイヤレス送信機ソース、衛星ソース、または両方から受信した信号の推定伝搬遅延を利用して、そのようなソースまでの距離を測定し得る。
【0017】
別の態様では、位置判断計算は、移動局200においてではなく、たとえば、図1に示すロケーションサーバ170など、ネットワークエンティティによって実行され得る。そのような計算は、ワイヤレス送信機132、134、または136のうちの1つまたは複数から移動局200によって収集された情報に少なくとも部分的に基づき得る。さらなる態様では、ロケーションサーバ170は計算された位置を移動局200に送信し得る。
【0018】
モバイル交換センター(MSC)140は、この例ではワイヤレス送信機132、134、および136に結合され得、さらに、公衆交換電話網(PSTN)、パケットデータサービングノード(PDSN)160など、他のシステムおよびネットワークに結合し得る。ロケーションサーバ170は、ロケーションデータを収集し、フォーマッティングし、位置推定のために移動局への支援を提供するか、または移動局の位置推定値を得るための計算を実行し得る。BSAサーバ180はBSAデータベース185を管理し、BSAデータベース185は、この例では、ワイヤレス通信ネットワーク120のための基地局アルマナックを記憶する。
【0019】
また一態様では、ロケーションサーバ170は、移動局200に1つまたは複数のマップを供給し得る。移動局200に供給されるマップは、1つまたは複数のマップ上でそれぞれの1つまたは複数の当該ポイントに関連付けられた1つまたは複数のロケーションコンテキスト識別子(LCI)に少なくとも部分的に依存し得る。LCIはマップを一意に識別し得、マップ中に含まれているPOIは、そのPOIが到達し得る1つまたは複数のLCIへの参照を含み得る。たとえば、建築物のドアはPOIを含み得、その特定のPOIは、ドアの屋外側の屋外エリアのマップを識別するLCIに関係する情報を含み得、また、ドアの他方の屋内側の屋内エリアのマップを識別するLCIに関係する情報を含み得る。移動局200に供給されたマップは、ユーザのためのナビゲーションソリューションを判断するために移動局200によって利用され得る。マップは、移動局200上のグラフィカルユーザインターフェースまたはディスプレイスクリーンを介してユーザに視覚的に提示され得る。本明細書で使用する「マップ」という用語は、開始ポイントと目的ポイントとの間でナビゲーションソリューションが判断され得るように屋内エリアまたは屋外エリアを記述し得る任意の情報に関係する。一態様では、マップは、ルート計算を可能にし得るメタデータを含み得る。たとえば、マップのグラフ表現がルート計算を可能にし得る。様々な例示的なマップの例示的なグラフ表現について以下で説明する。前述のように、マップは、移動局または他のコンピューティングプラットフォーム上に表示され得る情報を含み得る。マップは1つまたは複数の当該ポイントをさらに含み得る。当該ポイントは、座標のセット、たとえばSPS座標のセットに関連付けられ得る。当該ポイントは1つまたは複数のロケーションコンテキスト識別子にさらに関連付けられ得る。前述のように、LCIは別のマップの識別情報を含み得る。一態様では、LCIはマップへのポインタを含み得るが、請求する主題の範囲はこの点について限定されない。
【0020】
図2は、移動局200の例示的な実装形態の概略ブロック図である。一態様では、移動局200はSPS受信機210とワイヤレス通信トランシーバ220とを含む。したがって、移動局200は、SPS110などの1つまたは複数のSPSと通信し、たとえば、一態様ではセルラーネットワークを含むか、または別の態様ではWLANを含む、ワイヤレス通信ネットワーク120などの1つまたは複数の地上波ワイヤレスネットワークと通信し得る。別の態様では、移動局200は、一例では、マップ記憶領域230にマップ情報を記憶し、基地局アルマナック記憶領域240に基地局アルマナック情報を記憶するために区分されたメモリデバイスをさらに含み得る。
【0021】
さらなる態様では、移動局200は、この例では、たとえば、デッドレコニングナビゲーション動作において利用され得る慣性測定ユニット(Inertial Measurement Unit)(IMU)270に組み込まれた1つまたは複数のセンサを含み得る。IMU270に組み込まれ得る例示的なセンサは加速度計またはジャイロスコープを含み得る。ただし、請求する主題はこの点について限定されない。移動局200は、この例ではプロセッサ260をさらに含む。もちろん、これは移動局の構成の一例にすぎず、請求する主題の範囲はこの点について限定されない。
【0022】
一態様では、複数のワイヤレス送信機のためのロケーション情報は、ワイヤレス通信ネットワーク120中のBSAサーバ180などのネットワークエンティティに記憶されるか、またはワイヤレスネットワーク中の広範囲の他のリソースのうちのいずれかに記憶され得る。さらに、一例では、ワイヤレス送信機のためのロケーション情報は、経度および緯度を含み得、また別の例では高度情報を含み得る。ただし、これらはワイヤレス送信機のためのロケーション情報の例にすぎず、請求する主題の範囲はこの点について限定されない。別の態様では、いくつかのワイヤレス送信機は、それらのワイヤレス送信機のロケーションをブロードキャストし、そのようなロケーション情報は移動局200の1つまたは複数のデータベースに記憶され得る。
【0023】
さらに、追加の態様では、マップ記憶領域230は、たとえば、場合によっては位置サーバ170に記憶された、より大きいマップデータベースのサブセットを記憶していることがある。一態様では、ロケーションサーバ170などのネットワークエンティティは、将来のナビゲーション動作をサポートするために複数のマップのうちのどれが移動局200によって要求される可能性があるかを判断し得、そのようなマップの1つまたは複数は移動局200に供給され得る。さらなる態様では、ロケーションサーバ170は、特定のマップを識別するロケーションコンテキスト識別子を含む要求を移動局200から受信したことに少なくとも部分的に応答して、移動局200にマップを供給し得る。もちろん、請求する主題はこれらの点について範囲を限定されない。また、ルート判断は、たとえば、ロケーションサーバ170などのネットワークエンティティによって実行され得る。一態様では、移動局200は、移動局200が遷移POIに到着したことに少なくとも部分的に応答して、ロケーションサーバ170にルート要求を送信し得る。「遷移POI」は、LCIに関係する情報をもつPOIを含み得、ロケーションサーバ170は移動局200にルーティングソリューションを戻し得る。この場合も、請求する主題の範囲はこれらの点について限定されない。
【0024】
図3は、1つまたは複数のワイヤレス通信ネットワーク332および334を介して、およびインターネット340を介していくつかの移動局200および324と通信している例示的な基地局アルマナックサーバ350を示す図である。この例では、移動局200は、パケット交換ワイヤレスローカルエリアネットワーク(WLAN)332とセルラーネットワーク334の両方との通信をサポートし得るマルチモードデバイスを表す。もちろん、これらはマルチモードデバイスが通信し得るワイヤレス通信ネットワークのタイプの例にすぎず、請求する主題の範囲はこの点について限定されない。またこの例では、移動局324は、セルラーネットワーク334との通信をサポートし得るシングルモードデバイスを表す。この場合も、セルラーネットワークは、移動局が通信を確立し得るワイヤレス通信ネットワークの一例にすぎない。
【0025】
図3は、移動局200および324が監視し得るいくつかの送信機タイプ310をさらに示している。移動局200および324は、様々な送信機タイプから送信された信号を監視することが可能になるために、様々なそれぞれの送信機タイプに関連する任意の所与のネットワークにサブスクライブされてもまたはサブスクライブされなくてもよい。したがって、移動局に供給されるBSA情報は、移動局がサブスクライブされていないネットワークに関連する情報を含んでもまたは含まなくてもよい。移動局は、BSA情報について要求を行う場合、特定のネットワークまたは特定の送信機タイプを指定し得る。図3の例では、移動局200および324は、BSAデータベースのうちの少なくともサブセットを含むBSA情報をBSAサーバ350に要求し得る。
【0026】
別の態様では、BSAサーバ350は、外部BSAソース360からBSAデータベースを取得し得る。たとえば、セルラーネットワークプロバイダは、BSA情報をBSAサーバ350に展開または供給するためにサードパーティと契約を結び得る。さらに、一態様では、BSAサーバ350は、ナビゲーション動作のために1つまたは複数の移動局によって使用されるべき1つまたは複数のマップを記憶し得、別の態様では、そのようなマップは外部ソースによって供給され得る。BSA情報またはマップ情報のうちの少なくともサブセットは最終的に移動局200または324に送信され得る。図3の例は2つの移動局を示しているが、実際には、様々な潜在的なネットワークタイプと通信するために、広範囲の異なる機能または記憶能力を示す多種多様な移動局タイプが利用され得る。さらに、移動局は、広範囲の異なる使用パターンを示し得る。したがって、個々の移動局が必要とするかまたは要求し得るマップ情報またはBSA情報のうちの個別化されたサブセットをBSAサーバ350または別のネットワークエンティティが提供することが有利であり得、さらに、指定され得るパラメータのほんの少しの例を挙げれば、指定されたファイルサイズ、カバレージエリア、または送信機タイプに従って、フレキシブルな方法でフォーマッティングされたそのような情報を提供することが有利であり得る。一態様では、これらのパラメータは移動局によって指定され得る。
【0027】
図4は、例示的な屋外エリアを示すマップ400の図である。一例では、図4に示す屋外エリアは、上記で説明した移動局200など、移動局によって実行され得るナビゲーション動作のための特定のコンテキストを表す。図4の例では、移動局200のユーザが空港402に到着したと仮定され得る。移動局200が空港402に位置することが推定されるという判断に応答して、図4に示す屋外エリアに関連付けられたマップ400が移動局200に送信され得る。代替的に、図4に示す屋外エリアに関連付けられたマップ400がすでに移動局200に存在する場合、移動局200は、ナビゲーション動作のためにマップ400を選択し、マップ記憶領域230からマップ400を検索し得る。マップ400を利用して、移動局200は空港402から、一例ではオフィスビル500の入口を表し得る、当該ポイント510へのルートを判断し得る。本例では、移動局200のユーザは、商用で旅行中であり、当該ポイント510に位置するオフィスビル中にいる個人を訪問することを計画していると仮定され得る。ユーザは移動局200上でナビゲーション動作を開始し得、そのナビゲーション動作の開始に応答して、移動局200は空港402からPOI510へのルートを判断し得る。本例では、判断されたルートは経路415によって表され得、その経路415によって、ユーザは、街路404に沿って南に移動し、街路453に沿って東に移動し、街路468に沿って北に移動し、街路455に沿って東に移動し、POI510に位置するオフィスビルの入口に進むように指示され得る。もちろん、これは、例示的なルートと例示的なマップとにすぎず、請求する主題はこれらの点について範囲を限定されない。
【0028】
図5は、図4に示すマップ400のズームインされた部分を示す図である。より詳細には、図5は、街路455と街路468との交差点の近くにあるオフィスビル500の近傍のエリアにおけるマップ400の一部分を示す。経路415は、一例ではSPS座標(42.88,-71.55,321)に位置し得るPOI510に通じるものとして示されている。もちろん、これらは例示的な座標にすぎず、請求する主題の範囲はこの点について限定されない。一例では、ユーザは、移動局200を、本例ではPOI510を表すオフィスビル500の入口に携行し得る。一態様では、移動局200が時間とともに移動するにつれて、場合によっては周期的に、いくつかの位置フィックスが実行され得る。さらなる態様では、移動局200は、たとえば、1つまたは複数のSPS信号、あるいは1つまたは複数のWi-Fi信号に少なくとも部分的に基づいて移動局200のロケーションを周期的に判断し得る。さらに、一態様では、移動局200は、1つまたは複数のSPSまたはWi-Fi信号に基づいて少なくとも部分的に判断された以前のナビゲーションソリューションに基づいて移動局200の推定された位置を断続的または周期的に更新するために、移動局200中の1つまたは複数のIMUセンサ279を利用してデッドレコニングナビゲーション動作を実行し得る。
【0029】
移動局200がPOI510に到着したという判断に少なくとも部分的に応答して、移動局は、POI510に関連付けられたロケーションコンテキスト識別子(LCI)によって識別されるマップを選択し得る。POI510に関連付けられたLCIは、一態様では、追加のマップへのポインタを含むか、または場合によっては追加のマップを識別し得る。本例では、POI510に関連付けられたLCIによって識別されるマップは、オフィスビル500内の屋内エリアに関係する情報を含み得る。このようにして、ユーザがオフィスビル500に入ったとき、移動局200内でコンテキストスイッチが発生し得、それによって、ユーザによる介入を必要とすることなしにナビゲーション機能のために新しいマップが利用可能になり得る。
【0030】
図4および図5の例は、移動局が屋外エリアから屋内エリアに携行されている状況を示している。ただし、請求する主題はこの点について限定されず、マップを識別するLCIを含むPOIに移動局200が到着したという判断に応答して1つまたは複数のマップを選択することを含むマップ変化は、2つの異なる屋外エリアマップの間、2つの異なる屋内エリアマップの間、屋内エリアマップから屋外エリアマップへの間、または屋外エリアマップから屋内エリアマップへの間に生じ得る。さらに、請求する主題は、ナビゲーション動作のために利用され得るマップの特定のタイプに限定されない。たとえば、図4に示すマップなど、比較的大きいエリアをカバーする屋外マップでは、たとえば、比較的低い詳細レベルであるが比較的大きいエリアをカバーするマップが有利に利用され得る。別の例では、たとえば、図5に示すマップなど、より小さいエリアをカバーする屋外マップでは、より大きい詳細量が含まれ得る。
【0031】
同様に、屋内エリアについて、請求する主題はマップの特定のタイプに限定されない。以下で、具体的な例について説明する。ただし、上記のように、請求する主題の範囲はこの点について限定されない。1つまたは複数のマップによって表される屋内エリアは、サイズが大きく異なるか、あるいは屋内空間のタイプまたは目的によって大きく異なり得る。たとえば、ショッピングモールのメインエリア、または屋内フットボールスタジアム、または飛行機ハンガー、または他の同様の建造物は大型から極大型の内部を有し得る。別の例は食料雑貨店を含み得る。移動局は、ユーザによって指定された食料雑貨品目のリストを記憶し得、移動局は、店の位置を特定するために本明細書で説明する1つまたは複数の例示的なナビゲーション技法を利用し得る。さらに、移動局は、ユーザによって指定された品目までの食料雑貨店内のルートを判断し得る。そのような比較的大きい屋内エリアを通る経路を判断するためのナビゲーション技法は、より小さい屋内エリアに対してより適し得る技法とは異なり得る。いくつかの比較的大きい屋内エリアでは、ナビゲーションルーティング技法は、一態様では、屋外エリアのために使用される技法と同様であり得る。いくつかの極めて小さい屋内エリアでは、最終目的地へのルートを発見するためのどんなソリューションもユーザには直ちに明らかであり得るので、単にユーザを屋内空間の入口に導くことだけで十分であり得る。たとえば、ユーザがオフィスビル中の10フィート×10フィートの小会議室の入口に導かれた場合、ユーザは、どのように部屋に入室するかまたはその部屋を横断すべきかに関する命令を受け取る必要がないことがある。代替的に、比較的小さい部屋では、ナビゲーションソリューションは、小部屋の入口から目的ポイントへの直接経路を示すルートを提供し得る。図6および図7に関して説明する以下の例では、異なるサイズの屋内エリアに適切であり得るナビゲーションルーティングのいくつかの追加の例示的なタイプについて説明する。まとめると、開始ポイントから目的ポイントへの経路を判断するための様々な例示的な技法は、移動局ナビゲーションのためのスケーラブルルーティングのための例示的なシステムを提供する。当該ポイントに関連付けられたロケーションコンテキスト識別子によって判断された適切なマップを選択することによって、多種多様な状況に適したナビゲーションソリューションがユーザにとって利用可能になり得る。
【0032】
図6に、例示的なオフィスビル500の一部分の例示的なフロアプラン600を示す。移動局200は、POI510に、オフィスビル500の入口に位置するものとして示されていることに留意されたい。一例では、移動局200のユーザは、目的ポイントを指定する移動局200のプロセッサ260によって実行されるナビゲーションエージェントへの入力を与え得る。一態様では、ユーザは、オフィスビル500内の特定の会議を指定し得、その会議の入口はこの例では目的ポイント632と標示されている。また一態様では、移動局200はPOI510から目的ポイント632への適切な経路を判断し得、移動局200は、フロアプラン600のグラフ表示および判断された経路の表示を介してユーザにナビゲーションソリューションを提示し得る。
【0033】
一態様では、建築物内ルーティングの例示的な技法では、フロアプラン600などのフロアプランは、指定された目的地への適切な経路を判断するためにナビゲーションシステムによって使用され得るルーティンググラフに変換され得る。一態様では、建築物500などの建築物の屋内レイアウトのコンピュータ支援設計(CAD)表現が定義またはマークされ得る。レイアウトの例示的な定義では、廊下と廊下交差点とが定義およびマークされ得る。さらなる態様では、ルーティンググラフの交点が建築物の廊下交差点を表す、ルーティンググラフのグラフ図が生成され得る。図6の例では、廊下交差点620がマークされる。交点に対応する廊下交差点が廊下によって接続される場合、それらの交点はエッジによって接続され得る。図6の例では、エッジ640がマークされる。一態様では、ルーティンググラフ中の交点はロケーション情報を含み得る。一例では、そのようなロケーション情報は(x,y)座標ならびにフロア情報を含み得る。もちろん、請求する主題はこの点について限定されない。さらなる態様では、エッジには、交差点間の距離に少なくとも部分的に基づいて重みが割り当てられ得る。交点およびエッジの作成および定義に対するそのような手法は、いくつかの利点を有し得る、複雑さが低減されたルーティンググラフを提供し得る。意図された利点は、たとえば、ルーティンググラフを通る目的ポイントへの経路を判断する際に利用される、マップについての記憶要件の低減、およびコンピューティングリソースの低減を含み得る。さらなる態様では、グラフの複雑さをさらに低減するために、建築物内の部屋はルーティンググラフ中に表されないことがある。フロアプラン600に示すものなど、他の例では、部屋の入口ポイントが定義され得る。たとえば、フロアプラン600は屋内エリア入口ポイント630を示している。部屋は屋内エリアの一例にすぎない。
【0034】
また、フロアプラン600には当該ポイント610が示されている。特定の当該ポイント510、614、および616が示されている。POI510については上記で説明しており、さらに以下で説明する。フロアプラン600では、当該ポイント614はエレベータの入口に位置し、当該ポイント616は階段吹き抜けに位置する。一例では、POI614および616は、それぞれのマップを識別するロケーションコンテキスト識別子を含み得る。たとえば、移動局200のユーザが移動局200を当該ポイント614まで歩いて運ぶ場合、移動局200がPOI614に到着したと判断されると、POI614に関連付けられたLCIによって識別されるマップが、後続のナビゲーション動作において使用するために移動局200によって選択され得る。POI614に関連付けられたLCIによって識別されるマップが移動局200のマップ記憶領域230に現在記憶されていない場合、そのマップは、一例では、ロケーションサーバ170または別のネットワークエンティティによって検索され得る。さらなる態様では、POI614に関連付けられたLCIは2つ以上のマップを識別し得る。たとえば、移動局200のユーザがエレベータの入口に到着した場合、ユーザが建築物のどのフロアを訪問しようとしているのかがわからないことがある。したがって、移動局200は、ユーザが移動し得る可能なフロアの各々のマップを移動局200が利用できるようにすることが有利であり得る。別の例では、ユーザが特定のフロアのエレベータを出たとき、ユーザが建築物中のそのポイントにおけるPOIに到達するにつれてマップスイッチが行われ得、移動局がその特定のフロアとその特定のPOIとに到達することに基づいて、適切なマップが選択され得る。もちろん、これらは当該ポイントがどのように定義または使用され得るかの例にすぎず、請求する主題の範囲はこれらの点について限定されない。
【0035】
図6に戻ると、ユーザは、ポイント632をナビゲーション動作の目的ポイントとして指定し得る。ユーザはPOI510から目的ポイント632への最短ルートを知ることを望み得る。図6に示すように、廊下交差点620が示されており、それらの廊下交差点を接続するエッジ640が示されている。図6では、経路はPOI510から目的ポイント632に通じるものとして示されている。移動局200は、廊下交差点620のロケーションと、一例では廊下交差点を接続する個々のエッジに割り当てられた重み付け値によって表される、それらのロケーション間の距離とを分析することに少なくとも部分的によって、目的ポイント632への最短経路を判断し得る。図6に示す例では、エッジ641と、廊下交差点621と、エッジ642と、廊下交差点622と、エッジ643と、廊下交差点623と、エッジ644と、廊下交差点624と、エッジ645とを含み、目的ポイント632において終了する経路が判断される。ソリューション経路の一部として利用されないエッジは破線セグメントとして示されており、太線セグメントとして示されたエッジは、判断されたソリューション経路の部分を含む。もちろん、図6に示し上記で説明した例は、屋内エリアにおける移動局のためのルーティングナビゲーションソリューションのための例示的な技法にすぎない。請求する主題はこれらの点について範囲を限定されない。さらに、フロアプラン600は一例にすぎず、他の屋内エリアはより複雑であり得る。本明細書で説明する例示的な技法は、たとえば、ショッピングモール、オフィスビル、病院など、大きい屋内空間のためのルーティンググラフおよびナビゲーションソリューションを生成するために利用され得る。
【0036】
図6に関して上記で説明した例示的な技法は、比較的大きい屋内エリアまたは建築物内ナビゲーションルーティングのために有利に使用され得るが、空間内(intra-room)ルーティングのために他の例示的な技法が利用され得る。上記で説明した例示的な建築物内技法は、2部ルーティングシステムを達成するために様々な例示的な空間内技法とともに利用され得る。一態様では、ルーティングプロセスは、1)たとえば、上記で説明したようにルーティング交点および重み付けされたエッジを使用した、建築物内ルーティング、ならびに2)空間内ルーティングという、2つの別個のセグメントに区分され得る。例示的な2部ルーティング技法は建築物内ルーティングの複雑さを低減し得る。さらに、部屋はしばしば家具または仮設壁などの障害物を含んでいることがあり、これらの潜在的な障害物はルーティンググラフ中に表すことが困難なことがある。また、そのような潜在的な障害物は比較的頻繁に変化し、ルーティンググラフを最新に保つことをより困難にさせ得る。そのような問題に対して少なくとも部分的に対処するために、一態様では、例示的な空間内ルーティング技法が利用され得る。このようにして、比較的複雑な屋内空間または部屋をもつ比較的大きい建築物でさえエンドツーエンドにルーティングされ得る。
【0037】
空間内ルーティングのための例示的な技法は、前に説明したシンプルライン技法を含む。シンプルラインベースルーティング技法は、比較的小さい部屋か、または効率的なルーティングを可能にするのにはユーザの直観で十分であり得る部屋において使用され得る。そのような部屋の一例は、内部に限られた家具または障害物がある単純な事務室または小さい会議室を含み得る。例示的な実装形態では、屋内エリア入口ポイントから目的ポイントへの経路を判断することは、屋内エリア入口ポイントから目的ポイントへのラインをプロットすることを含むが、請求する主題はこの点において範囲を限定されない。
【0038】
図7は、上記で説明した単純なより小さい部屋よりも比較的大きくあり得る部屋において有利に利用され得る例示的な迷路ベースのルーティング技法を示す図である。より大きい部屋は、個室、または机の列など、複数の障害物を含んでいることがある。ユーザはそのような部屋の中を移動するための支援を望み得る。図7に示すように、部屋700の図は、グリッドに、または複数の方形エリアを含むグリッドに区分され得る。もちろん、この例示的な技法では方形を記載しているが、請求する主題はそのように限定されない。障害物を含んでいるグリッドのエリアを、障害エリア701を含むものとしてマークすることに少なくとも部分的によって、迷路マップが生成され得る。一例では、障害エリアは、横断することが困難であり得るかまたは通り抜け不可能であり得るエリアを含み得る。障害物を有しないグリッドのエリアはブランクのままにされ得る。そのようなエリアは、図7では非障害エリア702と標示されている。このように部屋が定義されると、屋内エリア入口ポイント710から目的ポイント720への経路715がルーティングされ得る。このようにして、複雑な部屋でも、よく知られている迷路横断ベースの経路発見アルゴリズムを使用して経路がルーティングされ得る。
【0039】
図8は、移動局ナビゲーションのためのスケーラブルルーティングのための例示的な技法の流れ図である。ブロック810において、移動局の位置を推定し得る。ブロック820において、第1のマップ上で移動局の推定された位置に最も近い、指定量までの当該ポイントを識別し得る。ブロック830において、第2のマップを選択し得る。第2のマップは、複数の当該ポイントのうちの第1の当該ポイントに関連付けられたロケーションコンテキスト識別子によって識別され得る。ブロック840において、第1のマップと第2のマップとを使用して移動局の推定された位置から目的ポイントへのルートを判断し得る。一態様では、第1のマップは屋外エリアのマップを含み得、第2のマップは屋内エリアのマップを含み得るが、請求する主題の範囲はこの点について限定されない。さらなる態様では、目的ポイントから屋外に通じる1つまたは複数の当該ポイントを識別し得る。
【0040】
さらなる態様では、第2のマップ上の第2の当該ポイントを識別し得、その第2の当該ポイントの識別に少なくとも部分的に応答して、後続のナビゲーション動作において移動局が使用するために第2の当該ポイントに関連付けられた第2のロケーションコンテキスト識別子によって識別される第3のマップを選択し得る。さらに、一態様では、他のロケーションコンテキスト識別子に通じる追加の当該ポイントを識別し続け得、他のロケーションコンテキスト識別子によって識別される追加のマップを選択し続け得、移動局の推定された位置から目的ポイントへの最終ルーティングソリューションが判断されるまで潜在的なルートを分析し続け得る。
【0041】
さらなる態様では、第1のマップに少なくとも部分的に基づく第1のエリアのグラフ図を表示し得、第1のマップにおいて1つまたは複数のロケーションコンテキスト識別子に個々に関連付けられた第1の複数の当該ポイントを表示し得る。一態様では、第1の複数の当該ポイントは、ユーザに対して表示され得る視覚マーカーを個々に含み得る。さらなる態様では、複数の第1の当該ポイントに関連付けられた1つまたは複数のロケーションコンテキスト識別子は、それぞれの1つまたは複数のマップへの1つまたは複数のポインタを個々に含み得る。ただし、この場合も、請求する主題の範囲はこの点について限定されない。請求する主題による例は、ブロック810およびブロック820のすべて、それら未満、またはそれら以上を含み得る。さらに、ブロック810およびブロック820の順序は例示的な順序にすぎず、請求する主題の範囲はこの点について限定されない。
【0042】
図9は、開始POIから目的POIへのルートを判断するための例示的なプロセスを示す流れ図である。ブロック910において、開始当該ポイントを確定するために移動局の位置の推定値を推定し得る。ブロック920において、開始POIのロケーションコンテキスト識別子と、目的POIのロケーションコンテキスト識別子とを識別し得る。ブロック930において、開始POIと目的POIとのLCIが複数のシナリオのうちのどれに対応するかに関する判断を行い得る。一態様では、開始POIと目的POIとのLCIは、それぞれ、以下のシナリオ、すなわち、1)屋外エリア、屋外エリア、2)屋内エリア、屋外エリア、3)屋外エリア、屋内エリア、または4)屋内エリア、屋内エリアのうちの1つに対応し得る。さらに、ブロック940において、判断されたシナリオに適した技法を使用して開始POIから目的POIへのルートを判断し得る。もちろん、図9に示すプロセスは一例にすぎず、請求する主題の範囲はこれらの点について限定されない。さらに、上記の例示的なシナリオに従って利用され得る例示的な技法について以下で説明する。
【0043】
図10は、屋外エリア1010と屋外エリア1020とを含む例示的なルーティングシナリオを示す図である。図10の例示的なシナリオは、上記で説明したシナリオ1に対応する。一態様では、開始当該ポイント1015と目的当該ポイント1025とが屋外エリア中にある図10に示すシナリオなどのシナリオでは、開始POI1015と目的POI1025との間のルートは、たとえば、以下で説明する屋内エリアから屋外エリアへの遷移を含み得るルーティングシナリオにおいて発見し得るような出口に位置する当該ポイントを顧慮せずに判断され得る。一態様では、屋外エリア1010および1020は、別々のマップを含み得、または、別の態様では、単一のマップを含み得る。さらに、屋外エリアに関与する少なくともいくつかのシナリオでは、エリア1010とエリア1020との間に追加の中間的屋外エリアが位置し得る。そのような場合、ルートを判断するために、ナビゲーション動作中に、中間的屋外エリアに対応する1つまたは複数の追加のマップが識別され、利用され得る。もちろん、図10に示すシナリオは一例にすぎず、請求する主題の範囲はこれらの点について限定されない。
【0044】
図11は、屋内エリア1110と屋外エリア1120とを含む例示的なルーティングシナリオを示す図である。図11に示す例示的なシナリオは、上記で説明した例示的なシナリオ2に対応する。図11に示す例では、開始POI1115は屋内エリア1110中にあり得、目的POI1125は屋外エリア1120中にあり得る。また、図11には、屋内エリア1110から屋外エリア1120に通じる出口に位置する当該ポイント1130、1140、および1150が示されている。POI1130、1140、および1150は「出口POI」と呼ばれることがある。図11に示す例示的なシナリオでは、例示的なルーティングプロセスは、開始POI1115から出口POI1130、1140、および1150への可能なルートを判断し得る。例示的な可能なルート1101、1102、および1103が図11に示されている。さらに、出口POI1130、1140、および1150から目的POI1125への可能なルートが判断され得、ルート1104、1105、および1106と標示されている。可能なルートを判断する際に、個々の可能なルートについて「コスト値」が判断され得る。一態様では、コスト値は、たとえば、距離、時間、または何らかの他の重み付け値を含み得るが、請求する主題の範囲はこの点について限定されない。コスト値は、開始POI1115から目的POI1125への最終ルートを少なくとも部分的に判断するための基礎を与え得る。最終ルート選択は、ほんのいくつかの考えられる例を挙げれば、開始から目的地への最短距離に少なくとも部分的に基づくか、または開始から目的地への推定移動時間に少なくとも部分的に基づき得る。図11に示す例では、可能なルート1101および1104を含むルートが最短最終ルートを含み得る。もちろん、図11に示すシナリオは一例にすぎず、請求する主題の範囲はこれらの点について限定されない。
【0045】
図12は、屋外エリア1210と屋内エリア1220とを含む例示的なルーティングシナリオを示す図である。図12に示す例示的なシナリオは、上記で説明した例示的なシナリオ3に対応する。一態様では、開始POI1215は屋外エリア1210中にあり得、目的POI1225は屋内エリア1220中にあり得る。出口POI1230および1240は、一例では、屋内エリア1220と屋外エリア1210との間の境界に位置し得る。一態様では、例示的な本シナリオでは、図12に示すように、目的POI1225から出口POI1230および1240への可能なルートが判断され得る。目的POI1225から出口POI1230および1240への可能なルートはそれぞれ1203および1204と標示されている。さらなる態様では、開始POI1215から出口POI1230および1240への可能なルートが判断され得、図12ではルート1201および1202と標示されている。開始POI1215から目的POI1225への最終ルート選択は、以前に判断された可能なルートに関連付けられたコスト値に少なくとも部分的に基づき得る。最終ルートは、ほんのいくつかの考えられる例を挙げれば、開始から目的地への最短距離、または開始から目的地への推定移動時間に少なくとも部分的に基づいて判断され得る。図12に示す例では、可能なルート1201および1203を含むルートが最短最終ルートを含み得る。もちろん、図12に示すシナリオは一例にすぎず、請求する主題の範囲はこれらの点について限定されない。
【0046】
図13は、屋外エリアによって分離された2つの屋内エリアを含む例示的なルーティングシナリオを示す図である。図13に示す例示的なシナリオは、上記で説明した例示的なシナリオ4の特殊な場合に対応する。一態様では、開始POI1315と目的POI1325とは1つまたは複数の屋内エリア中にあり得る。図13の例示的なシナリオでは、開始POI1315は屋内エリア1310中にあり得、目的POI1325は屋内エリア1320中にあり得る。一態様では、屋外エリア1330は、屋内エリア1310と屋内エリア1320との間に位置し得る。別の態様では、開始POI1315と目的POI1325との間のルートを判断するために、開始POI1315から、図13では出口POI1340および1350として示されている屋内エリア1310の出口点への可能なルートが判断され得る。さらに、目的POI1325から、図13では出口POI1360および1370として示されている屋内エリア1320の出口点への可能なルートが判断され得る。さらに、出口POI1340および1350を出口POI1360および1370に接続するルートが判断され得る。開始POI1315から目的POI1325への最終ルートは、たとえば、最低コスト経路を判断することに少なくとも部分的によって判断され得る。図13に示す例では、可能なルート1301、1305、および1303を含むルートが最短最終ルートを含み得る。もちろん、図13に示すシナリオは一例にすぎず、請求する主題の範囲はこれらの点について限定されない。
【0047】
さらなる態様では、開始ポイントと目的ポイントとがそれぞれ屋内エリア中にある図13に関して上記で説明したルーティングプロセスなどの例示的なルーティングプロセスでは、開始ポイントと目的ポイントとが同じ屋内エリア中にあり得るという可能性が存在する。上記で説明したように、開始POIと目的POIの両方が屋内エリア中にある例示的なルーティングシナリオでは、例示的なルーティングプロセスは、開始POIから開始POI屋内エリアの出口への可能な経路を判断することを含み得、また、目的POIから目的POI屋内エリアの出口への可能な経路を判断することを含み得る。目的POIから目的POI屋内エリアの出口への可能なルートを判断する際に、開始POIから開始POI屋内エリアの出口への以前に判断されたルートに沿って位置する当該ポイントのLCIに一致するLCIを有する1つまたは複数の当該ポイントを通過する可能なルートが判断され得る。LCIのそのような一致を発見すると、開始POIと目的POIとが同じ屋内エリア中にあると判断され得る。屋内エリアは1つまたは複数のフロアを含み得ることと、開始POIまたは目的POIから出口POIへの可能なルートを判断することは、屋内機構を示し得る1つまたは複数の中間当該ポイントを通る可能な経路を分析することを含み得ることとに留意されたい。当該ポイントとしてマップ上またはマップ中に表され得るマップ上の屋内機構は、たとえば、階段、エレベータ、エスカレータ、動く歩道、屋内出入口などを含み得る。もちろん、これらは例にすぎず、請求する主題の範囲はこの点について限定されない。
【0048】
図14は、建築物1410中の開始当該ポイント1415から屋外エリア1430を通って建築物1420中の目的当該ポイント1425に至る例示的な最低コストルート1402を示す図である。また、建築物1410および1420の出口当該点を含む、当該ポイント1440が図14に示されている。一態様では、最良の経路を判断するために利用され得る例示的なルーティングプロセスは、図13に関して上記で説明した例示的なプロセスに対応し得る。図13の例示的なシナリオの場合と同様に、図14の例は、上記で説明した例示的なシナリオ4に対応する、屋内エリア中にある開始POIと目的POIとを含む。一態様では、例示的なルーティングプロセスは、開始POI1415から建築物1410の出口POIへの可能なルートを判断することを含み得る。例示的な建築物1410はエレベータ1414および階段1412を含むことと、可能な経路はそれらの屋内機構を利用し得ることとに留意されたい。屋内機構は、ルートを判断する際に利用され得るコスト値を有し得る。もちろん、他の例示的な建築物は、たとえば、エスカレータ、動く歩道、屋内出入口など、他のタイプの屋内機構を含み得る。さらなる態様では、目的POI1425から建築物1420の出口POIへの可能なルートが判断され得る。建築物1420は階段1422およびエレベータ1424を含むが、この場合も、他の例示的な建築物は他のタイプの屋内機構を含み得る。さらに、建築物1410および1420は3つのフロアを含むが、請求する主題の範囲はこの点について限定されない。
【0049】
さらなる態様では、建築物1410の出口POIから建築物1420の出口POIへの可能なルートが判断され得る。上記で説明したように、可能なルートはコスト値に個々に関連付けられ得る。各建築物が3つの出口POIを含む状況では、9つの可能なルートが判断され得る。最低コストルート1402を判断するために、建築物1410と建築物1420との間のこれらの可能な経路は、開始POI1415から建築物1410の出口POIへの以前に判断された可能なルートとともに、および目的POI1425から建築物1420の出口POIへの以前に判断された可能なルートとともに分析され得る。
【0050】
前に説明した他の例の場合と同様に、図14に示すルーティング例はグラフ構造として示され得る。前に説明した例の場合と同様に、ルーティングソリューションは1つまたは複数のグラフを利用し得る。図14の例では、建築物1410および1420の各フロアは、たとえば、図6または図7に示すものなど、グラフ構造として示され得る。図6の例の場合と同様に、建築物1410および1420の各フロアは、廊下交差点と、廊下交差点または当該ポイントを接続するエッジとを含むグラフ構造によって表され得る。上述のように、エッジは重み付け値を有し得る。重み付け値は、少なくとも部分的に、可能なルートのコスト値を判断するために使用され得る。同様に、建築物1410の出口ポイントと建築物1420の出口ポイントとの間の屋外経路は、たとえば、グラフ構造として表され得る。ただし、図14に関して説明するグラフ構造は例示的なルーティング技法にすぎず、請求する主題の範囲はこれらの点について限定されない。
【0051】
本明細書で説明する方法は、特定の例に従って適用例に応じて様々な手段によって実装され得る。たとえば、そのような方法は、ハードウェア、ファームウェア、ソフトウェア、および/またはそれらの組合せで実装され得る。ハードウェア実装の場合、たとえば、処理ユニットは、1つまたは複数の特定用途向け集積回路(ASIC)、デジタル信号プロセッサ(DSP)、デジタル信号処理デバイス(DSP)、プログラマブル論理デバイス(PLD)、フィールドプログラマブルゲートアレイ(FPGA)、プロセッサ、コントローラ、マイクロコントローラ、マイクロプロセッサ、電子デバイス、本明細書で説明する機能を実行するように設計された他のデバイスユニット、および/またはそれらの組合せの中で実装され得る。
【0052】
本明細書で言及する「命令」は、1つまたは複数の論理演算を表す表現に関係する。たとえば、命令は、1つまたは複数のデータオブジェクトに対して1つまたは複数の演算を実行するために機械によって解釈可能であることによって「機械可読」であり得る。ただし、これは命令の一例にすぎず、請求する主題はこの点について限定されない。別の例では、本明細書で言及する命令は、符号化コマンドを含むコマンドセットを有する処理回路によって実行可能である符号化コマンドに関係し得る。そのような命令は、処理回路によって理解される機械語の形態で符号化され得る。この場合も、これらは命令の例にすぎず、請求する主題はこの点について限定されない。
【0053】
本明細書で言及する「記憶媒体」は、1つまたは複数の機械によって知覚可能な表現を維持することが可能な媒体に関係する。たとえば、記憶媒体は、機械可読命令および/または情報を記憶するための1つまたは複数の記憶デバイスを含み得る。そのような記憶デバイスは、たとえば、磁気、光学または半導体記憶媒体を含む、いくつかの媒体タイプのうちのいずれか1つを含み得る。そのような記憶デバイスはまた、任意のタイプの長期、短期、揮発性または非揮発性メモリデバイスを含み得る。ただし、これらは記憶媒体の例にすぎず、請求する主題はこれらの点について限定されない。
【0054】
本明細書で説明するワイヤレス通信技法は、ワイヤレスワイドエリアネットワーク(WWAN)、ワイヤレスローカルエリアネットワーク(WLAN)、ワイヤレスパーソナルエリアネットワーク(WPAN)など、様々なワイヤレス通信ネットワークに関連し得る。「ネットワーク」および「システム」という用語は、本明細書では互換的に使用され得る。WWANは、符号分割多元接続(CDMA)ネットワーク、時分割多元接続(TDMA)ネットワーク、周波数分割多元接続(FDMA)ネットワーク、直交周波数分割多元接続(OFDMA)ネットワーク、シングルキャリア周波数分割多元接続(SC-FDMA)ネットワーク、または上記のネットワークの任意の組合せなどであり得る。CDMAネットワークは、ほんのいくつかの無線技術を挙げれば、cdma2000、広帯域CDMA(W-CDMA)など、1つまたは複数の無線アクセス技術(RAT)を実装し得る。この場合、cdma2000は、IS-95規格、IS-2000規格、およびIS-856規格に従って実装される技術を含み得る。TDMAネットワークは、Global System for Mobile Communications(GSM(登録商標))、Digital Advanced Mobile Phone System(D-AMPS)、または何らかの他のRATを実装し得る。GSM(登録商標)およびW-CDMAは、「3rd Generation Partnership Project」(3GPP)と称する団体からの文書に記載されている。cdma2000は、「3rd Generation Partnership Project 2」(3GPP2)と称する団体からの文書に記載されている。3GPPおよび3GPP2の文書は公に入手可能である。たとえば、WLANはIEEE802.11xネットワークを含み得、WPANは、Bluetooth(登録商標)ネットワーク、IEEE802.15xを含み得る。本明細書で説明するワイヤレス通信実装形態はまた、WWAN、WLANおよび/またはWPANの任意の組合せとともに使用され得る。さらに、本明細書で説明するワイヤレス通信は、4Gワイヤレス通信プロトコルに準拠して実行されるワイヤレス通信を含み得る。
【0055】
本明細書で使用する「または」という用語は、その用語が使用されるコンテキストに少なくとも部分的に依存する様々な意味を含み得る。一般に、「または」がA、BまたはCなどのリストを関連付けるために使用された場合、包含的な意味で使用された場合はA、B、およびCを意味し、ならびに排他的な意味で使用された場合はA、BまたはCを意味するものとする。本明細書全体にわたる「一例」または「例」という言及は、例に関して説明する特定の特徴、構造、または特性が、請求する主題の少なくとも1つの例の中に含まれることを意味する。したがって、本明細書全体にわたる様々な箇所における「一例では」または「例」という句の出現は、必ずしもすべてが同じ例を指すわけではない。さらに、それらの特定の特徴、構造、または特性を組み合わせて1つまたは複数の例にし得る。本明細書で説明する例は、デジタル信号を使用して動作する機械、デバイス、エンジン、または装置を含み得る。そのような信号は、ロケーション間で情報を提供する電子信号、光信号、電磁信号、または任意の形態のエネルギーを含み得る。
【0056】
現在例示的な特徴と考えられていることを例示し説明したが、請求する主題を逸脱することなく、様々な他の変更が行われ得、均等物が代用され得ることが、当業者には理解されよう。さらに、本明細書で説明する中心概念から逸脱することなく、請求する主題の教示に特定の状況を適合させるために多くの変更が行われ得る。したがって、請求する主題は、開示する特定の例に限定されず、そのような請求する主題は、添付の特許請求の範囲の範囲内に入るすべての態様、およびそれらの均等物をも含み得るものとする。
【符号の説明】
【0057】
110 SPS
112 SV
114 SV
116 SV
120 ワイヤレス通信ネットワーク
132 ワイヤレス送信機
134 ワイヤレス送信機
136 ワイヤレス送信機
140 モバイル交換センター(MSC)
160 パケットデータサービングノード(PDSN)
170 ロケーションサーバ
170 位置サーバ
180 BSAサーバ
185 BSAデータベース
200 移動局
210 SPS受信機
220 ワイヤレス通信トランシーバ
230 マップ記憶領域
240 基地局アルマナック記憶領域
260 プロセッサ
270 慣性測定ユニット(Inertial Measurement Unit)(IMU)
270 IMU
279 IMUセンサ
310 送信機タイプ
324 移動局
332 パケット交換ワイヤレスローカルエリアネットワーク(WLAN)
334 セルラーネットワーク
340 インターネット
350 基地局アルマナックサーバ
350 BSAサーバ
360 外部BSAソース
400 マップ
402 空港
404 街路
415 経路
453 街路
455 街路
468 街路
500 オフィスビル
500 建築物
510 当該ポイント
510 POI
600 フロアプラン
610 当該ポイント
614 当該ポイント
614 POI
616 当該ポイント
616 POI
620 廊下交差点
621 廊下交差点
622 廊下交差点
623 廊下交差点
624 廊下交差点
630 屋内エリア入口ポイント
632 目的ポイント
632 ポイント
640 エッジ
641 エッジ
642 エッジ
643 エッジ
644 エッジ
645 エッジ
701 障害エリア
702 非障害エリア
710 屋内エリア入口ポイント
715 経路
720 目的ポイント
1010 屋外エリア
1015 開始当該ポイント
1015 開始POI
1020 屋外エリア
1025 目的当該ポイント
1025 目的POI
1101 ルート
1102 ルート
1103 ルート
1104 ルート
1105 ルート
1106 ルート
1110 屋内エリア
1115 開始POI
1120 屋外エリア
1125 目的POI
1130 当該ポイント
1130 POI
1130 出口POI
1140 当該ポイント
1140 POI
1140 出口POI
1150 当該ポイント
1150 POI
1150 出口POI
1201 ルート
1202 ルート
1203 ルート
1204 ルート
1210 屋外エリア
1215 開始POI
1220 屋内エリア
1225 目的POI
1230 出口POI
1240 出口POI
1301 ルート
1303 ルート
1305 ルート
1310 屋内エリア
1315 開始POI
1320 屋内エリア
1325 目的POI
1330 屋外エリア
1340 出口POI
1350 出口POI
1360 出口POI
1370 出口POI
1402 最低コストルート
1410 建築物
1412 階段
1414 エレベータ
1415 開始当該ポイント
1415 開始POI
1420 建築物
1422 階段
1424 エレベータ
1425 目的当該ポイント
1425 目的POI
1430 屋外エリア
1440 当該ポイント
【特許請求の範囲】
【請求項1】
移動局の位置を推定するステップと、
第1のマップ上で前記移動局の前記推定された位置に最も近い、指定量までの当該ポイントを識別するステップと、
前記識別された当該ポイントのうちの第1の当該ポイントに関連付けられた第1のロケーションコンテキスト識別子によって識別される第2のマップを選択するステップと、
前記第1のマップと前記第2のマップとを使用して前記移動局の前記推定された位置から目的ポイントへのルートを判断するステップと
を含む、方法。
【請求項2】
前記第1のマップが屋外エリアのマップを含み、前記第2のマップが屋内エリアのマップを含み、前記方法が、前記目的ポイントから屋外に通じる1つまたは複数の当該ポイントを識別するステップをさらに含む、請求項1に記載の方法。
【請求項3】
前記第2のマップ上で第2の当該ポイントを識別するステップと、
前記第2の当該ポイントを識別する前記ステップに少なくとも部分的に応答して、後続のナビゲーション動作において前記移動局が使用するために前記第2の当該ポイントに関連付けられた第2のロケーションコンテキスト識別子によって識別される第3のマップを選択するステップと、
他のロケーションコンテキスト識別子に通じる当該ポイントを識別することと、前記他のロケーションコンテキスト識別子によって識別される追加のマップを選択することと、前記移動局の前記推定された位置から前記目的ポイントへの最終ルーティングソリューションまで潜在的なルートを分析することとを続けるステップと
をさらに含む、請求項1に記載の方法。
【請求項4】
前記第1のマップに少なくとも部分的に基づく第1のエリアのグラフ図と、
前記第1のマップにおいて1つまたは複数のロケーションコンテキスト識別子に個々に関連付けられた第1の複数の当該ポイントであって、前記識別された当該ポイントのうちの1つまたは複数を含む、第1の複数の当該ポイントと
を表示するステップをさらに含む、請求項1に記載の方法。
【請求項5】
前記第1の複数の当該ポイントが視覚マーカーをさらに個々に含む、請求項4に記載の方法。
【請求項6】
前記第1の複数の当該ポイントに関連付けられた前記1つまたは複数のロケーションコンテキスト識別子が、それぞれの1つまたは複数のマップへの1つまたは複数のポインタを個々に含む、請求項4に記載の方法。
【請求項7】
前記第2のマップが前記屋内エリアのルーティンググラフを含む、請求項2に記載の方法。
【請求項8】
前記ルーティンググラフが、
複数の廊下交差点のうちの1つを個々に表す複数の交点と、
1つまたは複数の屋内エリア入口ポイントと、
複数のエッジであって、前記複数の廊下交差点のうちの2つ以上を個々に接続する1つまたは複数のエッジを含み、前記複数の廊下交差点のうちの1つと前記1つまたは複数の屋内エリア入口ポイントのうちの1つとを個々に接続する1つまたは複数のエッジをさらに含む、複数のエッジと
を含む、請求項7に記載の方法。
【請求項9】
前記複数の廊下交差点のうちの2つ以上の間の距離に従って、前記複数のエッジのうちのそれぞれの1つまたは複数に1つまたは複数の第1の重み値を割り当てるステップと、
前記1つまたは複数の屋内エリア入口ポイントのうちの第1の屋内エリア入口ポイントと前記複数の廊下交差点のうちの廊下交差点との間の距離に従って、前記複数のエッジのうちの別のそれぞれの1つまたは複数に1つまたは複数の第2の重み値を割り当てるステップと
をさらに含む、請求項8に記載の方法。
【請求項10】
前記第1の当該ポイントから前記目的ポイントへの経路を判断するステップをさらに含む、請求項9に記載の方法。
【請求項11】
前記経路を判断する前記ステップが、
前記第1の当該ポイントから前記第1の屋内エリア入口ポイントへの第1の経路を判断するステップと、
前記第1の屋内エリア入口ポイントから前記目的ポイントへの第2の経路を判断するステップと
を含む、請求項10に記載の方法。
【請求項12】
前記第1の経路を判断する前記ステップが、前記複数の廊下交差点のうちの1つまたは複数のロケーションに少なくとも部分的に基づいて、さらに前記複数の廊下交差点のうちの前記2つ以上を接続する前記複数のエッジのうちの前記それぞれの1つまたは複数の前記1つまたは複数の第1の重み値に少なくとも部分的に基づいて、前記第1の当該ポイントから前記第1の屋内エリア入口ポイントへの最短ルートを判断するステップを含む、請求項11に記載の方法。
【請求項13】
前記第1の屋内エリア入口ポイントから前記目的ポイントへの前記第2の経路を判断する前記ステップが、前記第1の屋内エリア入口ポイントから前記目的ポイントへのラインをプロットするステップを含む、請求項11に記載の方法。
【請求項14】
前記第1の屋内エリア入口ポイントから前記目的ポイントへの前記第2の経路を判断する前記ステップが、
前記屋内エリアを複数のエリアに区分するステップを含む、前記屋内エリアのグリッドを生成するステップと、
障害物を含んでいない前記複数のエリアのうちの1つまたは複数のエリアを識別するステップと、
前記第1の屋内エリア入口ポイントから前記目的ポイントまでの、障害物を含んでいないものとして識別された前記1つまたは複数のエリアを通る最短経路を判断するステップと
を含む、請求項11に記載の方法。
【請求項15】
前記第1の屋内エリア入口ポイントが、前記屋内エリアの前記マップを識別するロケーションコンテキスト識別子を含み、前記第1の屋内エリア入口ポイントから前記目的ポイントへの前記第2の経路を判断する前記ステップが、前記屋内エリアの前記マップを使用して前記第2の経路を判断するステップを含む、請求項11に記載の方法。
【請求項16】
前記移動局の位置を推定することと、
第1のマップ上で前記移動局の前記推定された位置に最も近い、指定量までの当該ポイントを識別することと、
前記識別された当該ポイントのうちの第1の当該ポイントに関連付けられた第1のロケーションコンテキスト識別子によって識別される第2のマップを選択することと、
前記第1のマップと前記第2のマップとを使用して前記移動局の前記推定された位置から目的ポイントへのルートを判断することと
を行うための、移動局のプロセッサによって実行可能な命令を記録したプロセッサ読み取り可能な記録媒体。
【請求項17】
前記第1のマップが屋外エリアのマップを含み、前記第2のマップが屋内エリアのマップを含み、前記記録媒体が、前記目的ポイントから屋外に通じる1つまたは複数の当該ポイントを識別するための、前記プロセッサによって実行可能なさらなる命令を記録した、請求項16に記載の記録媒体。
【請求項18】
前記記録媒体が、
前記第2のマップ上で第2の当該ポイントを識別することと、
前記第2の当該ポイントの前記識別に少なくとも部分的に応答して、後続のナビゲーション動作において前記移動局が使用するために前記第2の当該ポイントに関連付けられた第2のロケーションコンテキスト識別子によって識別される第3のマップを選択することと、
他のロケーションコンテキスト識別子に通じる当該ポイントを識別することと、前記他のロケーションコンテキスト識別子によって識別される追加のマップを選択することと、前記移動局の前記推定された位置から前記目的ポイントへの最終ルーティングソリューションが判断されるまで潜在的なルートを分析することとを続けることと
を行うための、前記プロセッサによって実行可能なさらなる命令を記録した、請求項16に記載の記録媒体。
【請求項19】
前記記録媒体が、
前記第1のマップに少なくとも部分的に基づく第1のエリアのグラフ図を表示することと、
前記第1のマップにおいて1つまたは複数のロケーションコンテキスト識別子に個々に関連付けられた第1の複数の当該ポイントを表示することであって、前記第1の複数の当該ポイントが前記識別された当該ポイントのうちの1つまたは複数を含む、第1の複数の当該ポイントを表示することと
を行うための、前記プロセッサによって実行可能なさらなる命令を記録した、請求項16に記載の記録媒体。
【請求項20】
前記第1の複数の当該ポイントが視覚マーカーをさらに個々に含む、請求項19に記載の記録媒体。
【請求項21】
前記第1の複数の当該ポイントに関連付けられた前記1つまたは複数のロケーションコンテキスト識別子が、それぞれの1つまたは複数のマップへの1つまたは複数のポインタを個々に含む、請求項19に記載の記録媒体。
【請求項22】
前記第2のマップが前記屋内エリアのルーティンググラフを含む、請求項17に記載の記録媒体。
【請求項23】
前記ルーティンググラフが、
複数の廊下交差点のうちの1つを個々に表す複数の交点と、
1つまたは複数の屋内エリア入口ポイントと、
複数のエッジであって、前記複数の廊下交差点のうちの2つ以上を個々に接続する1つまたは複数のエッジを含み、前記複数の廊下交差点のうちの1つと前記1つまたは複数の屋内エリア入口ポイントのうちの1つとを個々に接続する1つまたは複数のエッジをさらに含む、複数のエッジと
を含む、請求項22に記載の記録媒体。
【請求項24】
前記記録媒体が、
前記複数の廊下交差点のうちの2つ以上の間の距離に従って、前記複数のエッジのうちのそれぞれの1つまたは複数に1つまたは複数の第1の重み値を割り当てることと、
前記1つまたは複数の屋内エリア入口ポイントのうちの第1の屋内エリア入口ポイントと前記複数の廊下交差点のうちの廊下交差点との間の距離に従って、前記複数のエッジのうちの別のそれぞれの1つまたは複数に1つまたは複数の第2の重み値を割り当てることと
を行うための、前記プロセッサによって実行可能なさらなる命令を記録した、請求項23に記載の記録媒体。
【請求項25】
前記記録媒体が、前記第1の当該ポイントから前記目的ポイントへの経路を判断するための、前記プロセッサによって実行可能なさらなる命令を記録した、請求項24に記載の記録媒体。
【請求項26】
前記記録媒体が、
前記第1の当該ポイントから前記第1の屋内エリア入口ポイントへの第1の経路を判断することと、
前記第1の屋内エリア入口ポイントから前記目的ポイントへの第2の経路を判断することと
に少なくとも部分的によって前記経路を判断するための、前記プロセッサによって実行可能なさらなる命令を記録した、請求項25に記載の記録媒体。
【請求項27】
前記記録媒体が、前記複数の廊下交差点のうちの1つまたは複数のロケーションに少なくとも部分的に基づいて、さらに前記複数の廊下交差点のうちの前記2つ以上を接続する前記複数のエッジのうちの前記それぞれの1つまたは複数の前記1つまたは複数の第1の重み値に少なくとも部分的に基づいて、前記第1の当該ポイントから前記第1の屋内エリア入口ポイントへの最短ルートを判断することに少なくとも部分的によって前記第1の経路を判断するための、前記プロセッサによって実行可能なさらなる命令を記録した、請求項26に記載の記録媒体。
【請求項28】
前記記録媒体が、前記第1の屋内エリア入口ポイントから前記目的ポイントへのラインをプロットすることに少なくとも部分的によって前記第1の屋内エリア入口ポイントから前記目的ポイントへの前記第2の経路を判断するための、前記プロセッサによって実行可能なさらなる命令を記録した、請求項26に記載の記録媒体。
【請求項29】
前記記録媒体が、
前記屋内エリアを複数のエリアに区分することを含む、前記屋内エリアのグリッドを生成することと、
障害物を含んでいない前記複数のエリアのうちの1つまたは複数のエリアを識別することと、
前記第1の屋内エリア入口ポイントから前記目的ポイントまでの、障害物を含んでいないものとして識別された前記1つまたは複数のエリアを通る最短経路を判断することと
に少なくとも部分的によって前記第1の屋内エリア入口ポイントから前記目的ポイントへの前記第2の経路を判断するための、前記プロセッサによって実行可能なさらなる命令を記録した、請求項26に記載の記録媒体。
【請求項30】
前記第1の屋内エリア入口ポイントが、前記屋内エリアの前記マップを識別するロケーションコンテキスト識別子を含み、前記記録媒体が、前記屋内エリアの前記マップを使用して前記第2の経路を判断することに少なくとも部分的によって前記第1の屋内エリア入口ポイントから前記目的ポイントへの前記第2の経路を判断するための、前記プロセッサによって実行可能なさらなる命令を記録した、請求項26に記載の記録媒体。
【請求項31】
移動局であって、
ナビゲーション動作のために複数のマップを記憶するためのメモリと、
プロセッサであって、
前記複数のマップのうちの第1のマップ上で当該ポイントに対応する移動局の推定された位置に最も近い、指定量までの当該ポイントを識別することと、
前記識別された当該ポイントのうちの第1の当該ポイントに関連付けられた第1のロケーションコンテキスト識別子によって識別される前記複数のマップのうちの第2のマップを選択することと、
前記第1のマップと前記第2のマップとを使用して前記移動局の前記推定された位置から目的ポイントへのルートを判断することと
を行うためのプロセッサと
を含む移動局。
【請求項32】
前記第1のマップが屋外エリアのマップを含み、前記第2のマップが屋内エリアのマップを含み、前記プロセッサが、前記目的ポイントから屋外に通じる1つまたは複数の当該ポイントを識別することをさらに行う、請求項31に記載の移動局。
【請求項33】
前記プロセッサが、
前記第2のマップ上で第2の当該ポイントを識別することと、
前記第2の当該ポイントを前記識別することに少なくとも部分的に応答して、後続のナビゲーション動作において前記移動局が使用するために前記第2の当該ポイントに関連付けられた第2のロケーションコンテキスト識別子によって識別される第3のマップを選択することと、
他のロケーションコンテキスト識別子に通じる当該ポイントを識別することと、前記他のロケーションコンテキスト識別子によって識別される追加のマップを選択することと、前記移動局の前記推定された位置から前記目的ポイントへの最終ルーティングソリューションまで潜在的なルートを分析することとを続けることと
をさらに行う、請求項31に記載の移動局。
【請求項34】
前記第1のマップに少なくとも部分的に基づく第1のエリアのグラフ図と、
前記第1のマップにおいて1つまたは複数のロケーションコンテキスト識別子に個々に関連付けられた第1の複数の当該ポイントであって、前記識別された当該ポイントのうちの1つまたは複数を含む、第1の複数の当該ポイントと
を表示するためのディスプレイスクリーンをさらに含む、請求項31に記載の移動局。
【請求項35】
前記第1の複数の当該ポイントが視覚マーカーをさらに個々に含む、請求項34に記載の移動局。
【請求項36】
前記第1の複数の当該ポイントに関連付けられた前記1つまたは複数のロケーションコンテキスト識別子が、それぞれの1つまたは複数のマップへの1つまたは複数のポインタを個々に含む、請求項34に記載の移動局。
【請求項37】
前記第2のマップが前記屋内エリアのルーティンググラフを含む、請求項32に記載の移動局。
【請求項38】
前記ルーティンググラフが、
複数の廊下交差点のうちの1つを個々に表す複数の交点と、
1つまたは複数の屋内エリア入口ポイントと、
複数のエッジであって、前記複数の廊下交差点のうちの2つ以上を個々に接続する1つまたは複数のエッジを含み、前記複数の廊下交差点のうちの1つと前記1つまたは複数の屋内エリア入口ポイントのうちの1つとを個々に接続する1つまたは複数のエッジをさらに含む、複数のエッジと
を含む、請求項37に記載の移動局。
【請求項39】
前記プロセッサが、
前記複数の廊下交差点のうちの2つ以上の間の距離に従って、前記複数のエッジのうちのそれぞれの1つまたは複数に1つまたは複数の第1の重み値を割り当てることと、
前記1つまたは複数の屋内エリア入口ポイントのうちの第1の屋内エリア入口ポイントと前記複数の廊下交差点のうちの廊下交差点との間の距離に従って、前記複数のエッジのうちの別のそれぞれの1つまたは複数に1つまたは複数の第2の重み値を割り当てることと
をさらに行う、請求項38に記載の移動局。
【請求項40】
前記プロセッサが、前記第1の当該ポイントから前記目的ポイントへの経路を判断することをさらに行う、請求項39に記載の移動局。
【請求項41】
前記プロセッサが、
前記第1の当該ポイントから前記第1の屋内エリア入口ポイントへの第1の経路を判断することと、
前記第1の屋内エリア入口ポイントから前記目的ポイントへの第2の経路を判断することと
に少なくとも部分的によって前記経路を判断する、請求項40に記載の移動局。
【請求項42】
前記プロセッサが、前記複数の廊下交差点のうちの1つまたは複数のロケーションに少なくとも部分的に基づいて、さらに前記複数の廊下交差点のうちの前記2つ以上を接続する前記複数のエッジのうちの前記それぞれの1つまたは複数の前記1つまたは複数の第1の重み値に少なくとも部分的に基づいて、前記第1の当該ポイントから前記第1の屋内エリア入口ポイントへの最短ルートを判断することによって前記第1の経路を判断する、請求項41に記載の移動局。
【請求項43】
前記プロセッサが、前記第1の屋内エリア入口ポイントから前記目的ポイントへのラインをプロットすることに少なくとも部分的によって前記第1の屋内エリア入口ポイントから前記目的ポイントへの前記第2の経路を判断する、請求項41に記載の移動局。
【請求項44】
前記プロセッサが、
前記屋内エリアを複数のエリアに区分することを含む、前記屋内エリアのグリッドを生成することと、
障害物を含んでいない前記複数のエリアのうちの1つまたは複数のエリアを識別することと、
前記第1の屋内エリア入口ポイントから前記目的ポイントまでの、障害物を含んでいないものとして識別された前記1つまたは複数のエリアを通る最短経路を判断することと
に少なくとも部分的によって前記第1の屋内エリア入口ポイントから前記目的ポイントへの前記第2の経路を判断する、請求項41に記載の移動局。
【請求項45】
前記第1の屋内エリア入口ポイントが、前記屋内エリアの前記マップを識別するロケーションコンテキスト識別子を含み、前記プロセッサが、前記屋内エリアの前記マップを使用して前記第2の経路を判断することに少なくとも部分的によって前記第1の屋内エリア入口ポイントから前記目的ポイントへの前記第2の経路を判断する、請求項41に記載の移動局。
【請求項46】
移動局の位置を推定するための手段と、
第1のマップ上で前記移動局の前記推定された位置に最も近い、指定量までの当該ポイントを識別するための手段と、
前記識別された当該ポイントのうちの第1の当該ポイントに関連付けられた第1のロケーションコンテキスト識別子によって識別される第2のマップを選択するための手段と、
前記第1のマップと前記第2のマップとを使用して前記移動局の前記推定された位置から目的ポイントへのルートを判断するための手段と
を含む、装置。
【請求項47】
前記第1のマップが屋外エリアのマップを含み、前記第2のマップが屋内エリアのマップを含み、前記装置が、前記目的ポイントから屋外に通じる1つまたは複数の当該ポイントを識別するための手段をさらに含む、請求項46に記載の装置。
【請求項48】
前記第2のマップ上で第2の当該ポイントを識別するための手段と、
前記第2の当該ポイントの前記識別に少なくとも部分的に応答して、後続のナビゲーション動作において前記移動局が使用するために前記第2の当該ポイントに関連付けられた第2のロケーションコンテキスト識別子によって識別される第3のマップを選択するための手段と、
他のロケーションコンテキスト識別子に通じる当該ポイントを識別することと、前記他のロケーションコンテキスト識別子によって識別される追加のマップを選択することと、前記移動局の前記推定された位置から前記目的ポイントへの最終ルーティングソリューションまで潜在的なルートを分析することとを続けるための手段と
をさらに含む、請求項46に記載の装置。
【請求項49】
前記第1のマップに少なくとも部分的に基づく第1のエリアのグラフ図と、
前記第1のマップにおいて1つまたは複数のロケーションコンテキスト識別子に個々に関連付けられた第1の複数の当該ポイントであって、前記識別された当該ポイントのうちの1つまたは複数を含む、第1の複数の当該ポイントと
を表示するための手段をさらに含む、請求項46に記載の装置。
【請求項50】
前記第1の複数の当該ポイントが視覚マーカーをさらに個々に含む、請求項49に記載の装置。
【請求項51】
前記第1の複数の当該ポイントに関連付けられた前記1つまたは複数のロケーションコンテキスト識別子が、それぞれの1つまたは複数のマップへの1つまたは複数のポインタを個々に含む、請求項49に記載の装置。
【請求項52】
前記第2のマップが前記屋内エリアのルーティンググラフを含む、請求項47に記載の装置。
【請求項53】
前記ルーティンググラフが、
複数の廊下交差点のうちの1つを個々に表す複数の交点と、
1つまたは複数の屋内エリア入口ポイントと、
複数のエッジであって、前記複数の廊下交差点のうちの2つ以上を個々に接続する1つまたは複数のエッジを含み、前記複数の廊下交差点のうちの1つと前記1つまたは複数の屋内エリア入口ポイントのうちの1つとを個々に接続する1つまたは複数のエッジをさらに含む、複数のエッジと
を含む、請求項52に記載の装置。
【請求項54】
前記複数の廊下交差点のうちの2つ以上の間の距離に従って、前記複数のエッジのうちのそれぞれの1つまたは複数に1つまたは複数の第1の重み値を割り当てるための手段と、
前記1つまたは複数の屋内エリア入口ポイントのうちの第1の屋内エリア入口ポイントと廊下交差点との間の距離に従って、前記複数のエッジのうちの別のそれぞれの1つまたは複数に1つまたは複数の第2の重み値を割り当てるための手段と
をさらに含む、請求項53に記載の装置。
【請求項55】
前記第1の当該ポイントから前記目的ポイントへの経路を判断するための手段をさらに含む、請求項54に記載の装置。
【請求項56】
前記経路を判断するための前記手段が、
前記第1の当該ポイントから前記第1の屋内エリア入口ポイントへの第1の経路を判断するための手段と、
前記第1の屋内エリア入口ポイントから前記目的ポイントへの第2の経路を判断するための手段と
を含む、請求項55に記載の装置。
【請求項57】
前記第1の経路を判断するための前記手段が、前記複数の廊下交差点のうちの1つまたは複数のロケーションに少なくとも部分的に基づいて、さらに前記複数の廊下交差点のうちの前記2つ以上を接続する前記複数のエッジのうちの前記それぞれの1つまたは複数の前記1つまたは複数の第1の重み値に少なくとも部分的に基づいて、前記第1の当該ポイントから前記第1の屋内エリア入口ポイントへの最短ルートを判断するための手段を含む、請求項56に記載の装置。
【請求項58】
前記第1の屋内エリア入口ポイントから前記目的ポイントへの前記第2の経路を判断するための前記手段が、前記第1の屋内エリア入口ポイントから前記目的ポイントへのラインをプロットするための手段を含む、請求項56に記載の装置。
【請求項59】
前記第1の屋内エリア入口ポイントから前記目的ポイントへの前記第2の経路を判断するための前記手段が、
前記屋内エリアを複数のエリアに区分することを含む、前記屋内エリアのグリッドを生成するための手段と、
障害物を含んでいない前記複数のエリアのうちの1つまたは複数のエリアを識別するための手段と、
前記第1の屋内エリア入口ポイントから前記目的ポイントまでの、障害物を含んでいないものとして識別された前記1つまたは複数のエリアを通る最短経路を判断するための手段と
を含む、請求項56に記載の装置。
【請求項60】
前記第1の屋内エリア入口ポイントが、前記屋内エリアの前記マップを識別するロケーションコンテキスト識別子を含み、前記第1の屋内エリア入口ポイントから前記目的ポイントへの前記第2の経路を判断するための前記手段が、前記屋内エリアの前記マップを使用して前記第2の経路を判断するための手段を含む、請求項56に記載の装置。
【請求項1】
移動局の位置を推定するステップと、
第1のマップ上で前記移動局の前記推定された位置に最も近い、指定量までの当該ポイントを識別するステップと、
前記識別された当該ポイントのうちの第1の当該ポイントに関連付けられた第1のロケーションコンテキスト識別子によって識別される第2のマップを選択するステップと、
前記第1のマップと前記第2のマップとを使用して前記移動局の前記推定された位置から目的ポイントへのルートを判断するステップと
を含む、方法。
【請求項2】
前記第1のマップが屋外エリアのマップを含み、前記第2のマップが屋内エリアのマップを含み、前記方法が、前記目的ポイントから屋外に通じる1つまたは複数の当該ポイントを識別するステップをさらに含む、請求項1に記載の方法。
【請求項3】
前記第2のマップ上で第2の当該ポイントを識別するステップと、
前記第2の当該ポイントを識別する前記ステップに少なくとも部分的に応答して、後続のナビゲーション動作において前記移動局が使用するために前記第2の当該ポイントに関連付けられた第2のロケーションコンテキスト識別子によって識別される第3のマップを選択するステップと、
他のロケーションコンテキスト識別子に通じる当該ポイントを識別することと、前記他のロケーションコンテキスト識別子によって識別される追加のマップを選択することと、前記移動局の前記推定された位置から前記目的ポイントへの最終ルーティングソリューションまで潜在的なルートを分析することとを続けるステップと
をさらに含む、請求項1に記載の方法。
【請求項4】
前記第1のマップに少なくとも部分的に基づく第1のエリアのグラフ図と、
前記第1のマップにおいて1つまたは複数のロケーションコンテキスト識別子に個々に関連付けられた第1の複数の当該ポイントであって、前記識別された当該ポイントのうちの1つまたは複数を含む、第1の複数の当該ポイントと
を表示するステップをさらに含む、請求項1に記載の方法。
【請求項5】
前記第1の複数の当該ポイントが視覚マーカーをさらに個々に含む、請求項4に記載の方法。
【請求項6】
前記第1の複数の当該ポイントに関連付けられた前記1つまたは複数のロケーションコンテキスト識別子が、それぞれの1つまたは複数のマップへの1つまたは複数のポインタを個々に含む、請求項4に記載の方法。
【請求項7】
前記第2のマップが前記屋内エリアのルーティンググラフを含む、請求項2に記載の方法。
【請求項8】
前記ルーティンググラフが、
複数の廊下交差点のうちの1つを個々に表す複数の交点と、
1つまたは複数の屋内エリア入口ポイントと、
複数のエッジであって、前記複数の廊下交差点のうちの2つ以上を個々に接続する1つまたは複数のエッジを含み、前記複数の廊下交差点のうちの1つと前記1つまたは複数の屋内エリア入口ポイントのうちの1つとを個々に接続する1つまたは複数のエッジをさらに含む、複数のエッジと
を含む、請求項7に記載の方法。
【請求項9】
前記複数の廊下交差点のうちの2つ以上の間の距離に従って、前記複数のエッジのうちのそれぞれの1つまたは複数に1つまたは複数の第1の重み値を割り当てるステップと、
前記1つまたは複数の屋内エリア入口ポイントのうちの第1の屋内エリア入口ポイントと前記複数の廊下交差点のうちの廊下交差点との間の距離に従って、前記複数のエッジのうちの別のそれぞれの1つまたは複数に1つまたは複数の第2の重み値を割り当てるステップと
をさらに含む、請求項8に記載の方法。
【請求項10】
前記第1の当該ポイントから前記目的ポイントへの経路を判断するステップをさらに含む、請求項9に記載の方法。
【請求項11】
前記経路を判断する前記ステップが、
前記第1の当該ポイントから前記第1の屋内エリア入口ポイントへの第1の経路を判断するステップと、
前記第1の屋内エリア入口ポイントから前記目的ポイントへの第2の経路を判断するステップと
を含む、請求項10に記載の方法。
【請求項12】
前記第1の経路を判断する前記ステップが、前記複数の廊下交差点のうちの1つまたは複数のロケーションに少なくとも部分的に基づいて、さらに前記複数の廊下交差点のうちの前記2つ以上を接続する前記複数のエッジのうちの前記それぞれの1つまたは複数の前記1つまたは複数の第1の重み値に少なくとも部分的に基づいて、前記第1の当該ポイントから前記第1の屋内エリア入口ポイントへの最短ルートを判断するステップを含む、請求項11に記載の方法。
【請求項13】
前記第1の屋内エリア入口ポイントから前記目的ポイントへの前記第2の経路を判断する前記ステップが、前記第1の屋内エリア入口ポイントから前記目的ポイントへのラインをプロットするステップを含む、請求項11に記載の方法。
【請求項14】
前記第1の屋内エリア入口ポイントから前記目的ポイントへの前記第2の経路を判断する前記ステップが、
前記屋内エリアを複数のエリアに区分するステップを含む、前記屋内エリアのグリッドを生成するステップと、
障害物を含んでいない前記複数のエリアのうちの1つまたは複数のエリアを識別するステップと、
前記第1の屋内エリア入口ポイントから前記目的ポイントまでの、障害物を含んでいないものとして識別された前記1つまたは複数のエリアを通る最短経路を判断するステップと
を含む、請求項11に記載の方法。
【請求項15】
前記第1の屋内エリア入口ポイントが、前記屋内エリアの前記マップを識別するロケーションコンテキスト識別子を含み、前記第1の屋内エリア入口ポイントから前記目的ポイントへの前記第2の経路を判断する前記ステップが、前記屋内エリアの前記マップを使用して前記第2の経路を判断するステップを含む、請求項11に記載の方法。
【請求項16】
前記移動局の位置を推定することと、
第1のマップ上で前記移動局の前記推定された位置に最も近い、指定量までの当該ポイントを識別することと、
前記識別された当該ポイントのうちの第1の当該ポイントに関連付けられた第1のロケーションコンテキスト識別子によって識別される第2のマップを選択することと、
前記第1のマップと前記第2のマップとを使用して前記移動局の前記推定された位置から目的ポイントへのルートを判断することと
を行うための、移動局のプロセッサによって実行可能な命令を記録したプロセッサ読み取り可能な記録媒体。
【請求項17】
前記第1のマップが屋外エリアのマップを含み、前記第2のマップが屋内エリアのマップを含み、前記記録媒体が、前記目的ポイントから屋外に通じる1つまたは複数の当該ポイントを識別するための、前記プロセッサによって実行可能なさらなる命令を記録した、請求項16に記載の記録媒体。
【請求項18】
前記記録媒体が、
前記第2のマップ上で第2の当該ポイントを識別することと、
前記第2の当該ポイントの前記識別に少なくとも部分的に応答して、後続のナビゲーション動作において前記移動局が使用するために前記第2の当該ポイントに関連付けられた第2のロケーションコンテキスト識別子によって識別される第3のマップを選択することと、
他のロケーションコンテキスト識別子に通じる当該ポイントを識別することと、前記他のロケーションコンテキスト識別子によって識別される追加のマップを選択することと、前記移動局の前記推定された位置から前記目的ポイントへの最終ルーティングソリューションが判断されるまで潜在的なルートを分析することとを続けることと
を行うための、前記プロセッサによって実行可能なさらなる命令を記録した、請求項16に記載の記録媒体。
【請求項19】
前記記録媒体が、
前記第1のマップに少なくとも部分的に基づく第1のエリアのグラフ図を表示することと、
前記第1のマップにおいて1つまたは複数のロケーションコンテキスト識別子に個々に関連付けられた第1の複数の当該ポイントを表示することであって、前記第1の複数の当該ポイントが前記識別された当該ポイントのうちの1つまたは複数を含む、第1の複数の当該ポイントを表示することと
を行うための、前記プロセッサによって実行可能なさらなる命令を記録した、請求項16に記載の記録媒体。
【請求項20】
前記第1の複数の当該ポイントが視覚マーカーをさらに個々に含む、請求項19に記載の記録媒体。
【請求項21】
前記第1の複数の当該ポイントに関連付けられた前記1つまたは複数のロケーションコンテキスト識別子が、それぞれの1つまたは複数のマップへの1つまたは複数のポインタを個々に含む、請求項19に記載の記録媒体。
【請求項22】
前記第2のマップが前記屋内エリアのルーティンググラフを含む、請求項17に記載の記録媒体。
【請求項23】
前記ルーティンググラフが、
複数の廊下交差点のうちの1つを個々に表す複数の交点と、
1つまたは複数の屋内エリア入口ポイントと、
複数のエッジであって、前記複数の廊下交差点のうちの2つ以上を個々に接続する1つまたは複数のエッジを含み、前記複数の廊下交差点のうちの1つと前記1つまたは複数の屋内エリア入口ポイントのうちの1つとを個々に接続する1つまたは複数のエッジをさらに含む、複数のエッジと
を含む、請求項22に記載の記録媒体。
【請求項24】
前記記録媒体が、
前記複数の廊下交差点のうちの2つ以上の間の距離に従って、前記複数のエッジのうちのそれぞれの1つまたは複数に1つまたは複数の第1の重み値を割り当てることと、
前記1つまたは複数の屋内エリア入口ポイントのうちの第1の屋内エリア入口ポイントと前記複数の廊下交差点のうちの廊下交差点との間の距離に従って、前記複数のエッジのうちの別のそれぞれの1つまたは複数に1つまたは複数の第2の重み値を割り当てることと
を行うための、前記プロセッサによって実行可能なさらなる命令を記録した、請求項23に記載の記録媒体。
【請求項25】
前記記録媒体が、前記第1の当該ポイントから前記目的ポイントへの経路を判断するための、前記プロセッサによって実行可能なさらなる命令を記録した、請求項24に記載の記録媒体。
【請求項26】
前記記録媒体が、
前記第1の当該ポイントから前記第1の屋内エリア入口ポイントへの第1の経路を判断することと、
前記第1の屋内エリア入口ポイントから前記目的ポイントへの第2の経路を判断することと
に少なくとも部分的によって前記経路を判断するための、前記プロセッサによって実行可能なさらなる命令を記録した、請求項25に記載の記録媒体。
【請求項27】
前記記録媒体が、前記複数の廊下交差点のうちの1つまたは複数のロケーションに少なくとも部分的に基づいて、さらに前記複数の廊下交差点のうちの前記2つ以上を接続する前記複数のエッジのうちの前記それぞれの1つまたは複数の前記1つまたは複数の第1の重み値に少なくとも部分的に基づいて、前記第1の当該ポイントから前記第1の屋内エリア入口ポイントへの最短ルートを判断することに少なくとも部分的によって前記第1の経路を判断するための、前記プロセッサによって実行可能なさらなる命令を記録した、請求項26に記載の記録媒体。
【請求項28】
前記記録媒体が、前記第1の屋内エリア入口ポイントから前記目的ポイントへのラインをプロットすることに少なくとも部分的によって前記第1の屋内エリア入口ポイントから前記目的ポイントへの前記第2の経路を判断するための、前記プロセッサによって実行可能なさらなる命令を記録した、請求項26に記載の記録媒体。
【請求項29】
前記記録媒体が、
前記屋内エリアを複数のエリアに区分することを含む、前記屋内エリアのグリッドを生成することと、
障害物を含んでいない前記複数のエリアのうちの1つまたは複数のエリアを識別することと、
前記第1の屋内エリア入口ポイントから前記目的ポイントまでの、障害物を含んでいないものとして識別された前記1つまたは複数のエリアを通る最短経路を判断することと
に少なくとも部分的によって前記第1の屋内エリア入口ポイントから前記目的ポイントへの前記第2の経路を判断するための、前記プロセッサによって実行可能なさらなる命令を記録した、請求項26に記載の記録媒体。
【請求項30】
前記第1の屋内エリア入口ポイントが、前記屋内エリアの前記マップを識別するロケーションコンテキスト識別子を含み、前記記録媒体が、前記屋内エリアの前記マップを使用して前記第2の経路を判断することに少なくとも部分的によって前記第1の屋内エリア入口ポイントから前記目的ポイントへの前記第2の経路を判断するための、前記プロセッサによって実行可能なさらなる命令を記録した、請求項26に記載の記録媒体。
【請求項31】
移動局であって、
ナビゲーション動作のために複数のマップを記憶するためのメモリと、
プロセッサであって、
前記複数のマップのうちの第1のマップ上で当該ポイントに対応する移動局の推定された位置に最も近い、指定量までの当該ポイントを識別することと、
前記識別された当該ポイントのうちの第1の当該ポイントに関連付けられた第1のロケーションコンテキスト識別子によって識別される前記複数のマップのうちの第2のマップを選択することと、
前記第1のマップと前記第2のマップとを使用して前記移動局の前記推定された位置から目的ポイントへのルートを判断することと
を行うためのプロセッサと
を含む移動局。
【請求項32】
前記第1のマップが屋外エリアのマップを含み、前記第2のマップが屋内エリアのマップを含み、前記プロセッサが、前記目的ポイントから屋外に通じる1つまたは複数の当該ポイントを識別することをさらに行う、請求項31に記載の移動局。
【請求項33】
前記プロセッサが、
前記第2のマップ上で第2の当該ポイントを識別することと、
前記第2の当該ポイントを前記識別することに少なくとも部分的に応答して、後続のナビゲーション動作において前記移動局が使用するために前記第2の当該ポイントに関連付けられた第2のロケーションコンテキスト識別子によって識別される第3のマップを選択することと、
他のロケーションコンテキスト識別子に通じる当該ポイントを識別することと、前記他のロケーションコンテキスト識別子によって識別される追加のマップを選択することと、前記移動局の前記推定された位置から前記目的ポイントへの最終ルーティングソリューションまで潜在的なルートを分析することとを続けることと
をさらに行う、請求項31に記載の移動局。
【請求項34】
前記第1のマップに少なくとも部分的に基づく第1のエリアのグラフ図と、
前記第1のマップにおいて1つまたは複数のロケーションコンテキスト識別子に個々に関連付けられた第1の複数の当該ポイントであって、前記識別された当該ポイントのうちの1つまたは複数を含む、第1の複数の当該ポイントと
を表示するためのディスプレイスクリーンをさらに含む、請求項31に記載の移動局。
【請求項35】
前記第1の複数の当該ポイントが視覚マーカーをさらに個々に含む、請求項34に記載の移動局。
【請求項36】
前記第1の複数の当該ポイントに関連付けられた前記1つまたは複数のロケーションコンテキスト識別子が、それぞれの1つまたは複数のマップへの1つまたは複数のポインタを個々に含む、請求項34に記載の移動局。
【請求項37】
前記第2のマップが前記屋内エリアのルーティンググラフを含む、請求項32に記載の移動局。
【請求項38】
前記ルーティンググラフが、
複数の廊下交差点のうちの1つを個々に表す複数の交点と、
1つまたは複数の屋内エリア入口ポイントと、
複数のエッジであって、前記複数の廊下交差点のうちの2つ以上を個々に接続する1つまたは複数のエッジを含み、前記複数の廊下交差点のうちの1つと前記1つまたは複数の屋内エリア入口ポイントのうちの1つとを個々に接続する1つまたは複数のエッジをさらに含む、複数のエッジと
を含む、請求項37に記載の移動局。
【請求項39】
前記プロセッサが、
前記複数の廊下交差点のうちの2つ以上の間の距離に従って、前記複数のエッジのうちのそれぞれの1つまたは複数に1つまたは複数の第1の重み値を割り当てることと、
前記1つまたは複数の屋内エリア入口ポイントのうちの第1の屋内エリア入口ポイントと前記複数の廊下交差点のうちの廊下交差点との間の距離に従って、前記複数のエッジのうちの別のそれぞれの1つまたは複数に1つまたは複数の第2の重み値を割り当てることと
をさらに行う、請求項38に記載の移動局。
【請求項40】
前記プロセッサが、前記第1の当該ポイントから前記目的ポイントへの経路を判断することをさらに行う、請求項39に記載の移動局。
【請求項41】
前記プロセッサが、
前記第1の当該ポイントから前記第1の屋内エリア入口ポイントへの第1の経路を判断することと、
前記第1の屋内エリア入口ポイントから前記目的ポイントへの第2の経路を判断することと
に少なくとも部分的によって前記経路を判断する、請求項40に記載の移動局。
【請求項42】
前記プロセッサが、前記複数の廊下交差点のうちの1つまたは複数のロケーションに少なくとも部分的に基づいて、さらに前記複数の廊下交差点のうちの前記2つ以上を接続する前記複数のエッジのうちの前記それぞれの1つまたは複数の前記1つまたは複数の第1の重み値に少なくとも部分的に基づいて、前記第1の当該ポイントから前記第1の屋内エリア入口ポイントへの最短ルートを判断することによって前記第1の経路を判断する、請求項41に記載の移動局。
【請求項43】
前記プロセッサが、前記第1の屋内エリア入口ポイントから前記目的ポイントへのラインをプロットすることに少なくとも部分的によって前記第1の屋内エリア入口ポイントから前記目的ポイントへの前記第2の経路を判断する、請求項41に記載の移動局。
【請求項44】
前記プロセッサが、
前記屋内エリアを複数のエリアに区分することを含む、前記屋内エリアのグリッドを生成することと、
障害物を含んでいない前記複数のエリアのうちの1つまたは複数のエリアを識別することと、
前記第1の屋内エリア入口ポイントから前記目的ポイントまでの、障害物を含んでいないものとして識別された前記1つまたは複数のエリアを通る最短経路を判断することと
に少なくとも部分的によって前記第1の屋内エリア入口ポイントから前記目的ポイントへの前記第2の経路を判断する、請求項41に記載の移動局。
【請求項45】
前記第1の屋内エリア入口ポイントが、前記屋内エリアの前記マップを識別するロケーションコンテキスト識別子を含み、前記プロセッサが、前記屋内エリアの前記マップを使用して前記第2の経路を判断することに少なくとも部分的によって前記第1の屋内エリア入口ポイントから前記目的ポイントへの前記第2の経路を判断する、請求項41に記載の移動局。
【請求項46】
移動局の位置を推定するための手段と、
第1のマップ上で前記移動局の前記推定された位置に最も近い、指定量までの当該ポイントを識別するための手段と、
前記識別された当該ポイントのうちの第1の当該ポイントに関連付けられた第1のロケーションコンテキスト識別子によって識別される第2のマップを選択するための手段と、
前記第1のマップと前記第2のマップとを使用して前記移動局の前記推定された位置から目的ポイントへのルートを判断するための手段と
を含む、装置。
【請求項47】
前記第1のマップが屋外エリアのマップを含み、前記第2のマップが屋内エリアのマップを含み、前記装置が、前記目的ポイントから屋外に通じる1つまたは複数の当該ポイントを識別するための手段をさらに含む、請求項46に記載の装置。
【請求項48】
前記第2のマップ上で第2の当該ポイントを識別するための手段と、
前記第2の当該ポイントの前記識別に少なくとも部分的に応答して、後続のナビゲーション動作において前記移動局が使用するために前記第2の当該ポイントに関連付けられた第2のロケーションコンテキスト識別子によって識別される第3のマップを選択するための手段と、
他のロケーションコンテキスト識別子に通じる当該ポイントを識別することと、前記他のロケーションコンテキスト識別子によって識別される追加のマップを選択することと、前記移動局の前記推定された位置から前記目的ポイントへの最終ルーティングソリューションまで潜在的なルートを分析することとを続けるための手段と
をさらに含む、請求項46に記載の装置。
【請求項49】
前記第1のマップに少なくとも部分的に基づく第1のエリアのグラフ図と、
前記第1のマップにおいて1つまたは複数のロケーションコンテキスト識別子に個々に関連付けられた第1の複数の当該ポイントであって、前記識別された当該ポイントのうちの1つまたは複数を含む、第1の複数の当該ポイントと
を表示するための手段をさらに含む、請求項46に記載の装置。
【請求項50】
前記第1の複数の当該ポイントが視覚マーカーをさらに個々に含む、請求項49に記載の装置。
【請求項51】
前記第1の複数の当該ポイントに関連付けられた前記1つまたは複数のロケーションコンテキスト識別子が、それぞれの1つまたは複数のマップへの1つまたは複数のポインタを個々に含む、請求項49に記載の装置。
【請求項52】
前記第2のマップが前記屋内エリアのルーティンググラフを含む、請求項47に記載の装置。
【請求項53】
前記ルーティンググラフが、
複数の廊下交差点のうちの1つを個々に表す複数の交点と、
1つまたは複数の屋内エリア入口ポイントと、
複数のエッジであって、前記複数の廊下交差点のうちの2つ以上を個々に接続する1つまたは複数のエッジを含み、前記複数の廊下交差点のうちの1つと前記1つまたは複数の屋内エリア入口ポイントのうちの1つとを個々に接続する1つまたは複数のエッジをさらに含む、複数のエッジと
を含む、請求項52に記載の装置。
【請求項54】
前記複数の廊下交差点のうちの2つ以上の間の距離に従って、前記複数のエッジのうちのそれぞれの1つまたは複数に1つまたは複数の第1の重み値を割り当てるための手段と、
前記1つまたは複数の屋内エリア入口ポイントのうちの第1の屋内エリア入口ポイントと廊下交差点との間の距離に従って、前記複数のエッジのうちの別のそれぞれの1つまたは複数に1つまたは複数の第2の重み値を割り当てるための手段と
をさらに含む、請求項53に記載の装置。
【請求項55】
前記第1の当該ポイントから前記目的ポイントへの経路を判断するための手段をさらに含む、請求項54に記載の装置。
【請求項56】
前記経路を判断するための前記手段が、
前記第1の当該ポイントから前記第1の屋内エリア入口ポイントへの第1の経路を判断するための手段と、
前記第1の屋内エリア入口ポイントから前記目的ポイントへの第2の経路を判断するための手段と
を含む、請求項55に記載の装置。
【請求項57】
前記第1の経路を判断するための前記手段が、前記複数の廊下交差点のうちの1つまたは複数のロケーションに少なくとも部分的に基づいて、さらに前記複数の廊下交差点のうちの前記2つ以上を接続する前記複数のエッジのうちの前記それぞれの1つまたは複数の前記1つまたは複数の第1の重み値に少なくとも部分的に基づいて、前記第1の当該ポイントから前記第1の屋内エリア入口ポイントへの最短ルートを判断するための手段を含む、請求項56に記載の装置。
【請求項58】
前記第1の屋内エリア入口ポイントから前記目的ポイントへの前記第2の経路を判断するための前記手段が、前記第1の屋内エリア入口ポイントから前記目的ポイントへのラインをプロットするための手段を含む、請求項56に記載の装置。
【請求項59】
前記第1の屋内エリア入口ポイントから前記目的ポイントへの前記第2の経路を判断するための前記手段が、
前記屋内エリアを複数のエリアに区分することを含む、前記屋内エリアのグリッドを生成するための手段と、
障害物を含んでいない前記複数のエリアのうちの1つまたは複数のエリアを識別するための手段と、
前記第1の屋内エリア入口ポイントから前記目的ポイントまでの、障害物を含んでいないものとして識別された前記1つまたは複数のエリアを通る最短経路を判断するための手段と
を含む、請求項56に記載の装置。
【請求項60】
前記第1の屋内エリア入口ポイントが、前記屋内エリアの前記マップを識別するロケーションコンテキスト識別子を含み、前記第1の屋内エリア入口ポイントから前記目的ポイントへの前記第2の経路を判断するための前記手段が、前記屋内エリアの前記マップを使用して前記第2の経路を判断するための手段を含む、請求項56に記載の装置。
【図1】

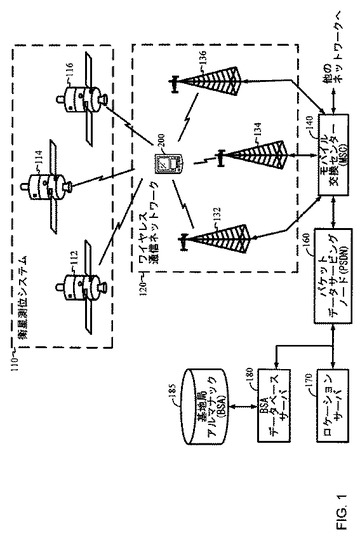
【図2】
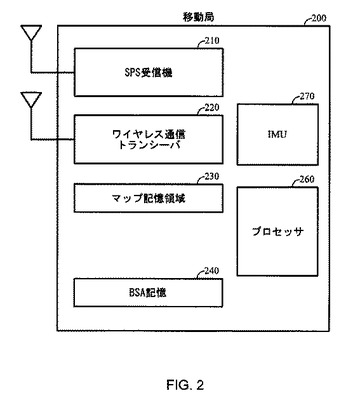
【図3】
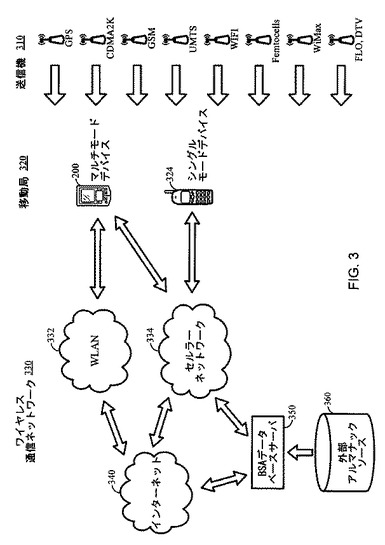
【図4】
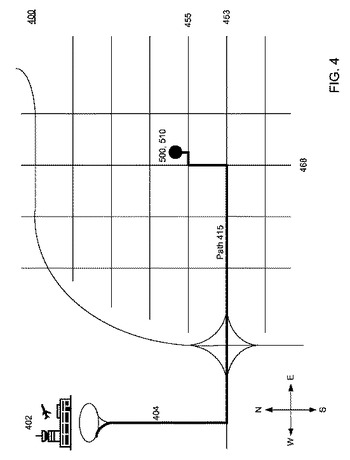
【図5】
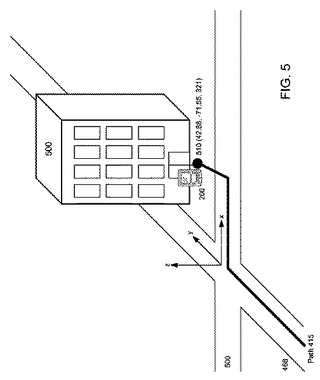
【図6】
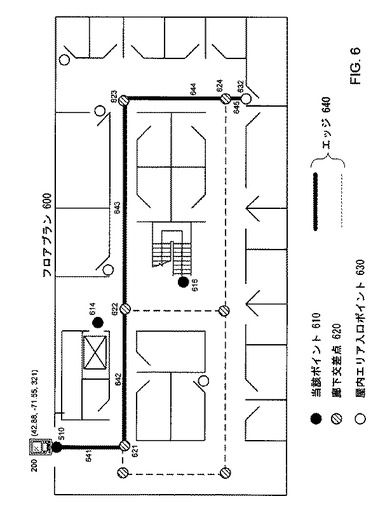
【図7】
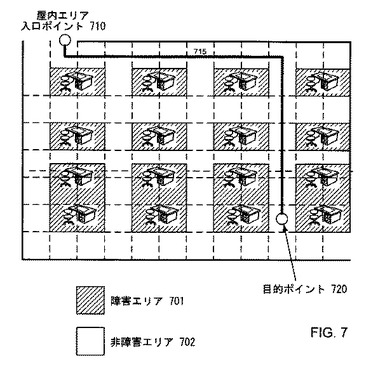
【図8】
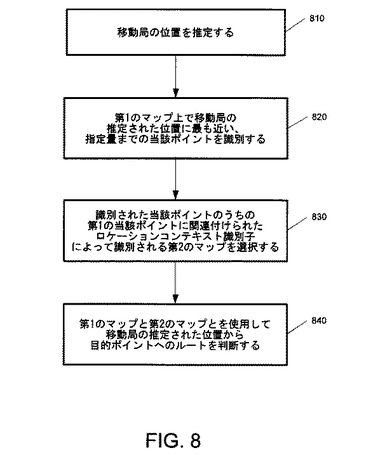
【図9】
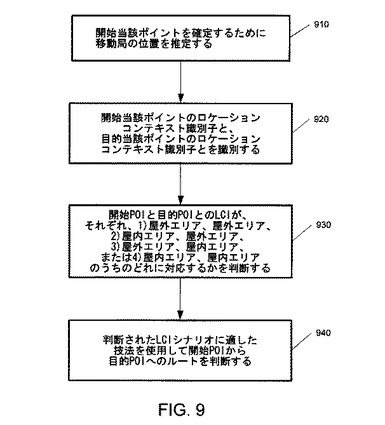
【図10】
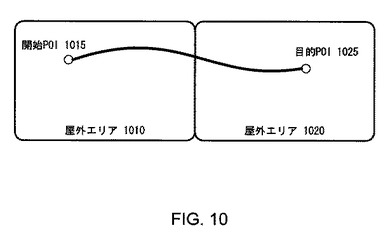
【図11】
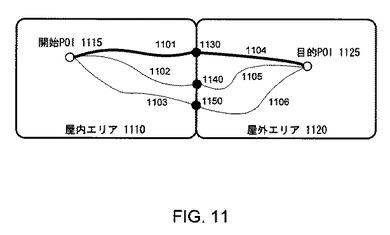
【図12】
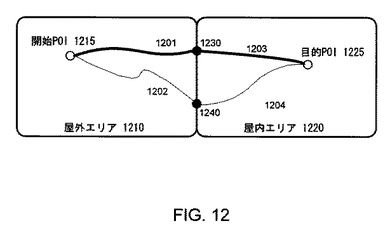
【図13】
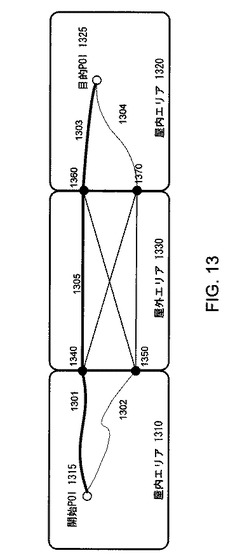
【図14】
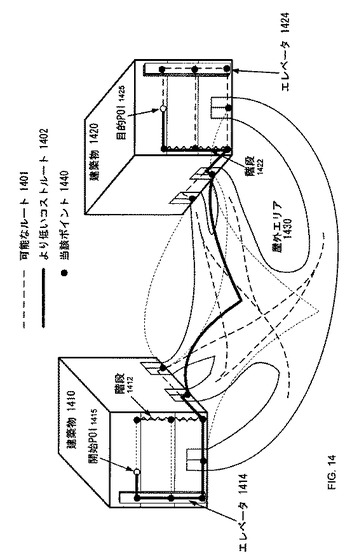
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公表番号】特表2013−517480(P2013−517480A)
【公表日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願番号】特願2012−549143(P2012−549143)
【出願日】平成23年1月14日(2011.1.14)
【国際出願番号】PCT/US2011/021414
【国際公開番号】WO2011/088407
【国際公開日】平成23年7月21日(2011.7.21)
【出願人】(507364838)クアルコム,インコーポレイテッド (446)
【Fターム(参考)】
【公表日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願日】平成23年1月14日(2011.1.14)
【国際出願番号】PCT/US2011/021414
【国際公開番号】WO2011/088407
【国際公開日】平成23年7月21日(2011.7.21)
【出願人】(507364838)クアルコム,インコーポレイテッド (446)
【Fターム(参考)】
[ Back to top ]