
ロケーティングステーション
【課題】コンベアシステム用のロケーティングデバイスを提供する。
【解決手段】コンベアシステムにおけるロケーティング位置でパックを保持するためのロケーティングデバイス(1)は、ベース部(4)と、レールセクション(2)と、ベース部(4)に回転可能に支持されかつパック凹部(5)を有する回転ディスク(3)とを具備してなり、ロケーティングデバイスは、回転ディスク(3)のパック凹部(5)とレールセクションにおけるポジショニング手段(6)と間のロケーティング位置を具備してなると共に、ロケーティングデバイスはロケーティング位置においてパックを保持するよう構成された弾性手段(7)を具備してなる。本発明の利点は、物品を、あるコンベアトラックから他のコンベアトラックへと、容易にかつコスト効率よく移動させることができるということである。
【解決手段】コンベアシステムにおけるロケーティング位置でパックを保持するためのロケーティングデバイス(1)は、ベース部(4)と、レールセクション(2)と、ベース部(4)に回転可能に支持されかつパック凹部(5)を有する回転ディスク(3)とを具備してなり、ロケーティングデバイスは、回転ディスク(3)のパック凹部(5)とレールセクションにおけるポジショニング手段(6)と間のロケーティング位置を具備してなると共に、ロケーティングデバイスはロケーティング位置においてパックを保持するよう構成された弾性手段(7)を具備してなる。本発明の利点は、物品を、あるコンベアトラックから他のコンベアトラックへと、容易にかつコスト効率よく移動させることができるということである。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はコンベアシステム用のロケーティングデバイスに関する。
【背景技術】
【0002】
工場内で異なるステーション間で物品を移動させるために使用されるもののような輸送デバイスは、たいてい、ベルトあるいはチェーンの形態の輸送トラックを有する。輸送トラックは、垂直側面を備えた溝内に配置される。あるいは、溝の水平上面に配置でき、あるいはその他の様式で配置できる。輸送される物品は、直にあるいは運搬手段(これはまたパレットとして知られている)を介して、輸送トラックに対してスライド可能に配置される。特殊なタイプのパレットがパック(puck)であり、これは、小さなあるいは軽量な物品に適合した円形キャリアである。
【0003】
パレットは輸送デバイスに沿って運ばれるが、これは異なるワークステーションを具備してなる。ワークステーションにおいては、輸送される物品に対して作業を実施できるようにパレットは停止させられる。ある場合には、物品は、それに対して作業が実施されることなく、特定のワークステーションを通過できる。
【0004】
輸送システムが従来型のもの(全てのワークステーションは前後に配置されかつ物品に対する作業は同期的に実施される)である場合、全てのパレットは各ワークステーションにおいて停止する。特定のワークステーションにおいて物品に対して作業が実施されない場合、物品は、それが前進できるまで、そのワークステーションにおいて先行物品に対する作業が準備完了となるまで、そのワークステーションにおいて待機する必要がある。全てのパレットは、この場合、同時に解放され、そして同時に移動する。そうしたシステムの一つの利点は、システムの効率を予測するのが容易であるということである。そうしたシステムの一つの欠点は、著しく柔軟性に欠けることである。ワークステーションでの作業時間が長い場合、全ての物品はその時間は待機する必要がある。したがって、そうしたシステムは、主として、単一の製品あるいは製品の差異が僅かである場合に使用される。
【0005】
他のシステムにおいては、物品に対する作業は非同期的に実施される。すなわち、パレットは、作業が実施されるワークステーションにおいて停止し、そして作業が準備完了となったときに解放される。そうしたシステムにおいては、製品の異なる流通時間を、そしてワークステーションにおける異なる作業時間を補償するために、各ワークステーション間には比較的大きなバッファーが必要となる。
【0006】
ワークステーションにおける異なる作業時間を補償する他の方法は、同じ作業を行う二つ以上のワークステーションを使用することである。それらは、たいてい、互いに近接して配置され、そして物体は、フリーなワークステーションにおいて停止させられる。こうして、システムの流通時間は、システムにおけるボトルネックを回避するために、バランスさせることができる。そうしたシステムにおいて、パレットは、ワークステーションにおいて停止させられ、あるいは作業が実施されることなくワークステーションを通過する。
【0007】
非常に簡素なシステムにおいては、コンベアデバイス上でパレットを停止させ、それを簡単な停止機構を用いてそこで保持すれば十分であろう。これは、充填あるいは取り出しといった簡単な作業が実施される場合には十分である。より高度な作業に関して、パレットおよび/またはワークピースは、通常、メインコンベアからコンベアトラックの側の位置へと方向転換される。こうして、コンベアトラック(これは動き続ける)からの影響を受けることなくワークピースに対して作業を実施できる。
【0008】
ワークステーションは、メインコンベアの側方に配置されたサブコンベアに配置される。そうした解決策は、余分なスペース、余分なサブコンベア、そしてサブコンベアへと物品を方向転換するための手段を必要とする。この解決策は、ある場合には、良好に機能するが、些細な作業に関しては柔軟性に乏しく、しかも複雑である。
【0009】
パレットがワークステーションにおいて停止させられたとき、ワークステーションが作業を実施するために、特別な予め決定された位置でパレットが保持されることが重要である。ワークステーションのロケーティング精度が十分に良くない場合、ワークピースが損傷することがあり、あるいは作業が期待したほど良好でないことがある。パレットおよび/またはワークピースの繰り返し可能な位置決めを実現するために、作業ステーションは、通常、作業中にワークピースを保持する特殊な固定手段を備える。
【0010】
そうした固定手段はたいてい、それがワークピースを保持するためにセンサーに依存して作動させられる停止および特殊な保持手段に到達する前に、パレットおよび/またはワークピースの位置を確定するために多数のセンサーを備える。そうした解決策は、ある場合には、必要以上に複雑になることがある。それゆえ改善の余地があった。
【発明の概要】
【発明が解決しようとする課題】
【0011】
したがって本発明の目的は、コンベアシステム用のロケーティングデバイスを提供することである。
【0012】
本発明のさらなる目的は、パックを方向転換しかつそれを特定の位置にて保持できるロケーティングデバイスを提供することである。本発明の他の目的は、ロケーティングデバイスを備えたコンベアシステムを提供することである。
【課題を解決するための手段】
【0013】
本発明に基づく課題の解決策は、請求項1の特徴部に記載されている。請求項11には有利なコンベアシステムが記載されている。その他の請求項には有利な実施形態およびロケーティングデバイスのさらなる展開が記載されている。
【0014】
ベース部と、レールセクションと、ベース部に回転可能に支持されると共にパック凹部を有する回転ディスクとを備えた、コンベアシステムにおけるロケーティング位置でパックを保持するためのロケーティングデバイスにおいて、本発明の目的は、ロケーティングデバイスが、回転ディスクのパック凹部とレールセクションにおけるポジショニング手段との間にロケーティング位置を具備してなること、および、ロケーティングデバイスは、ロケーティング位置でパックを保持するよう構成された弾性手段を具備してなることによって達成される。
【0015】
本発明に基づくロケーティングデバイスのこの第1実施形態によれば、コンベアトラック側方の予め決定された位置へとパックを方向転換でき、かつ、この位置でパックをほじできるロケーティングデバイスが提供される。そうしたロケーティングデバイスによれば、回転ディスクは、コンベアトラックに隣接するロケーティング位置へとコンベアトラックからまずパックを方向転換し、そして、その後、パックのワークピースに作業が実施されている間、この固定された、予め決定されたロケーティング位置にてパックを保持する。こうして、ロケーティング位置へとパックを輸送する外的運搬手段、およびこの位置でパックを保持する外的保持手段は不要である。こうして、簡単かつコスト効率に優れたロケーティングデバイスが実現される。ロケーティングデバイスは、回転ディスクは別として、メンテナンスを必要とする可動部品を持たない。
【0016】
本発明に係るロケーティングデバイスは、一つ以上の弾性要素によってパックをロケーティング位置で保持する。弾性要素は異なるタイプのスプリング、たとえばスチールスプリング、あるいはエラストマー要素であってもよい。弾性要素は、回転ディスクに、あるいはレールに設けられたポジショニング手段に設けることができる。弾性要素はパックを位置確定要素に向かって押し付ける。このため、ロケーティング位置の繰り返し精度が極めて高い。
【0017】
ある実施形態では、弾性手段が回転ディスクに設けられる。位置確定要素がレールに搭載されたポジショニング手段に設けられる。この実施形態では、位置確定要素は固定される。この解決策は、回転ディスクの精度に関係のないロケーティング位置の高い繰り返し精度を実現する。こうして比較的安価なデコーダーが回転ディスクのために使用できる。なぜなら、回転ディスクの停止位置の偏差はロケーティング位置に影響を与えないからである。回転ディスクの設計に依存して、回転ディスクの停止位置に関する数度の偏差は許容可能である。
【0018】
第2実施形態では、弾性要素がレールのポジショニング手段に設けられる。位置確定要素は、ここでは、回転ディスクのパック凹部内に設けられる。この実施形態では、ロケーティング位置の繰り返し精度は回転ディスクの精度に依存する。ロケーティング位置の必要な繰り返し精度に依存して、適当な回転デコーダーが回転ディスクのために選ばれる。1/10度ないし1度の範囲内にある回転ディスクの停止位置に関する精度が好ましい。
【0019】
以下、図示する実施形態を参照して、本発明についてさらに詳しく説明する。
【図面の簡単な説明】
【0020】
【図1】本発明に基づくロケーティングユニットを示す図である。
【図2】本発明に基づくロケーティングデバイスの第1実施形態を示す図である。
【図3a】本発明に基づくロケーティングデバイスの第2実施形態の実例を示す図である。
【図3b】本発明に基づくロケーティングデバイスの第2実施形態の他の実例を示す図である。
【発明を実施するための形態】
【0021】
以下で説明するさらなる展開を具備した本発明の実施形態は単なる実例と見なすべきであり、特許請求の範囲の記載によってもたらされる保護範囲を決して制限するものではない。
【0022】
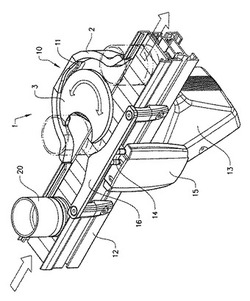
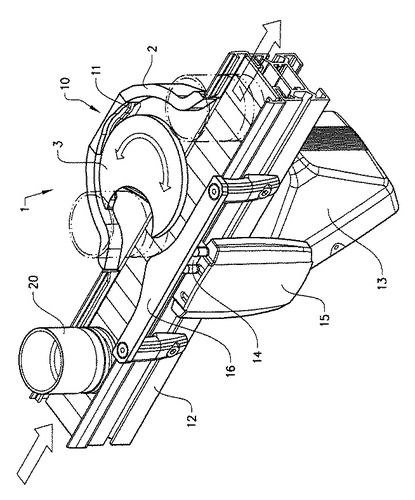
図1は本発明に基づくコンベアシステム用のロケーティングユニット10を示し、かつ、図2はロケーティングユニットにおいて使用されるロケーティングデバイスの第1実施形態を示している。ロケーティングユニット10は、この実例では、ロケーティングデバイス1、コンベアビーム12、モーター13、位置センサー14、RFID読み取り/書き込みヘッド15およびステアリングレール16を具備してなる。ロケーティングユニット10は、試験管、小瓶あるいはその他の容器といったワークピースを保持するパック20を扱うよう構成される。
【0023】
ロケーティングユニットは、コンベアシステム内に搭載されるよう構成される。コンベアビームは他のコンベアビームに対して接続され、かつ、コンベアチェーンは、エンドレスなコンベアトラックが得られるようにビームに対して設置される。モーターは、パックが回転ユニットに到着したとき回転ディスクを回転させる。モーターは独立していても、ロケーティングユニットにおけるセンサーによってのみ制御されてもよく、あるいは完全なコンベアシステムの制御システムに対して接続されていてもよい。センサー14は、パックが回転ディスクのパック凹部内に到達したどうかを検出する。センサーはモーターを直に制御してもよく、あるいは制御システムに信号を送信してもよい。RFID読み取り/書き込みヘッドはパックに設けられたRFIDタグを検出でき、この結果、各パックが識別され、かつ/または特定のデータがRFIDに蓄積される。コンベアシステムは公知であり、詳しくは説明しない。
【0024】
図1および図2に示すロケーティングデバイスは、コンベアビームに搭載されるよう構成されたベース部4を具備してなる。ベース部が、コンベアチェーンを具備してなるコンベアビームに搭載されたとき、ベース部の上面の高さは、パックが問題なくコンベアチェーンからベース部上のロケーティング位置19へと方向転換できるように、コンベアチェーンの高さと一致する。ロケーティング位置19は、パックのワークピースに対する作業の間、パック20が保持されることになる位置である。ロケーティングデバイスはさらに、コンベアチェーンから方向転換されたとき、パックがロケーティングデバイスから落下するのを阻止する湾曲レール2を具備してなる。パックは、このパックのサイズに対応するパック凹部5を具備してなる回転ディスク3によって方向転換される。パックがロケーティングデバイスに到達したとき、回転ディスクは、パックがパック凹部内に入り込むアイドル位置に置かれる。
【0025】
センサーはパックがパック凹部内の適所に存在することを検出し、そしてモーターが回転ディスクをパックと共に回転させる。図1では、回転ディスクはアイドル位置で示されている。図2では、回転ディスクはパックがロケーティング位置19に存在する状態で示されている。図示する実施形態では、コンベアトラックは矢印17の方向に動く。回転ディスクは、この例では、ロケーティング位置へとパックを運ぶために、時計回りに回転する。これに代えて、パックをロケーティング位置へと運ぶべきでない場合には、回転ディスクは、パックをロケーティングデバイスを素通りさせるために、反時計周りに回転する。パックは、その後、それがコンベアトラック上で解放されるまで、ステアリングレール16に当接状態で支持される。
【0026】
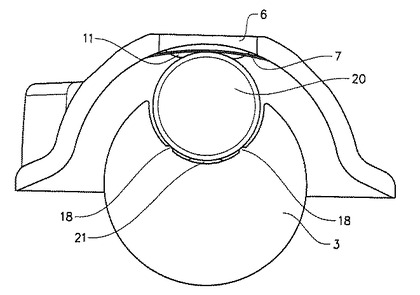
パックがロケーティング位置に配置されるべきとき、回転ディスクはパックがロケーティング位置に配置されるまで回転する。この位置は予め決定され、そしてモーターの検出器は回転ディスクがこの位置で停止するように較正される。ロケーティング位置でパックを保持するために、ポジショニング手段6がレールに設けられる。ポジショニング手段は、それに対してパックが当接する位置確定要素18を具備してなる。図示する実施形態では、位置確定手段はV字形ブロックの二つの側面であるが、他の形式の位置確定手段も使用可能である。ポジショニング手段はロケーティングデバイスに固定されるが、これは、ロケーティング位置の位置繰り返し精度が極めて良好であることを意味する。回転ディスクは、ポジショニング手段に対してパックを押し付ける弾性手段を備える。こうして、各パックは、毎回、回転ディスクの停止位置の精度に関係なく、ロケーティングデバイスにおいて同じ位置を獲得する。回転ディスクの停止位置は、それゆえ、パック位置の繰り返し精度に影響を与えることなく、ある程度、ずれてもよい。
【0027】
回転ディスクにおける弾性手段は、図示する実施例では、スチール製の連続したリーフスプリングである。他の形状のリーフスプリングを使用すること、二つのリーフスプリングを使用すること、あるいは他の種類のスプリングを使用することも可能である。弾性手段としてエラストマー要素を使用することも可能である。弾性手段はパックがパック凹部内に入り込むのを阻んではならないが、ポジショニング手段に対してパックを押し付けることが可能でなければならない。弾性手段の力は、たとえばモーターの回転トルクに依存する。
【0028】
パックがロケーティング位置にあるとき、パック内のワークピースに対して作業を実施できる。そうした作業としては、試験管を充填すること、試験管からサンプルを抽出すること、医薬品ボトルを充填すること、試験管を挿入することあるいは取り出すことが挙げられる。パックが弾性手段によって適所にて保持されるので、コンベアトラックの面内でワークピースに対して荷重が加えられるべきではない。下向き垂直方向の荷重は許容される。パックのベースの溝に対応する位置決めフランジ11をポジション手段に設けることによって、また、上向き鉛直方向の荷重が許容される。回転ホイール3はまた、図2に破線で示すように、位置決めホイール21を備える。位置決めホイールはまた、パックのベースの溝に対応し、そしてまた上向き鉛直方向の力を受けるのを助ける。上向き鉛直方向における荷重性能を向上させるために、回転ディスクのパック凹部に、パックのベースの溝に対応するフランジを設けることも可能である。
【0029】
ワークピースへの作業が完了したとき、回転ディスクは、パックが解放位置(これは次のステーションへとコンベアトラック上でつながっている)に達するまで時計回りに回転し続ける。回転ディスクは、続いて、次のパックをピックアップするために、アイドル位置まで回転して戻る。回転ディスクはパック凹部を一つしか持たないので、ロケーティングデバイスには余分な停止機能は必要ない。なぜなら、他のパックはロケーティングデバイスに入り込むことができないからである。ロケーティングデバイスはまた、キューイング(queuing)機能を提供するが、これによれば、ロケーティングデバイスはパックを整列させ、そしてシステムが必要とするとき、それをロケーティングデバイスを通過させる。
【0030】
本ロケーティングデバイスの一つの利点は、全てのパックがロケーティングデバイスのロケーティング位置を通過する必要はないということである。これによって、システムの能力を高めるために、コンベアシステムをスケールアップすることが可能となる。コンベアトラック上に前後に二つのロケーティングを配置することによって、第1のロケーティングデバイスは、全ての第2のパックを第2のロケーティングデバイスへと送り込むことができ、かつ、作業のために第1のロケーティングデバイスのロケーティング位置へと全ての他のものを送り込むことができる。第2のロケーティングデバイスは、第1のロケーティング位置に存在していたパックを通過させる。
【0031】
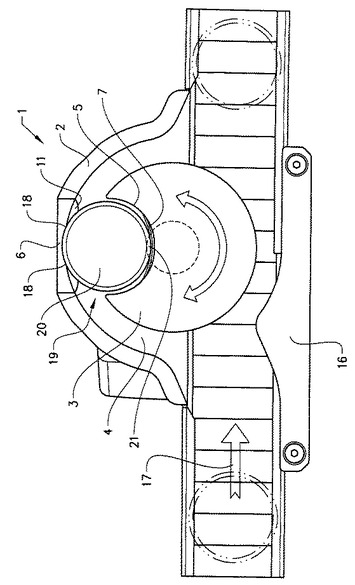
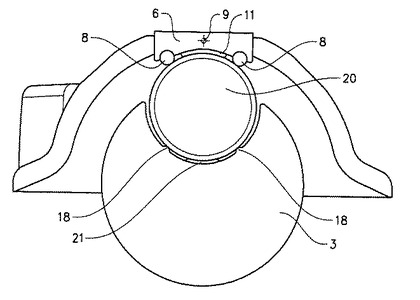
図3aに示すロケーティングデバイスの第2実施形態においては、ポジショニング手段は、回転ディスクのパック凹部の内面に対してパックを押し付ける弾性手段7を備える。ロケーティング位置の繰り返し精度を改善するために、パック凹部に、位置確定要素18を設けることが可能である。パック凹部に位置確定要素18を設けることが可能である。位置確定要素は、好ましくは、パック凹部の内面の二つの突起であり、この結果、パックが位置確定要素に当接するときに良好に確定されたロケーティング位置が実現される。この実施形態では、回転ディスクの停止位置の精度は第1実施形態よりも重要であり、それは、ロケーティング位置の繰り返し精度を確定する。ワークピースに施される作業に依存して、停止位置に精度は相応に選択可能である。
【0032】
ポジショニング手段における弾性手段はまた、スチールからなる連続リーフスプリングであってもよい。他の形状のリーフスプリングを使用すること、二つのリーフスプリングを使用すること、あるいは他のタイプのスプリングを使用することも可能である。弾性手段としてエラストマー要素を使用することも可能である。弾性手段はパックがロケーティング位置に入り込むことを可能とする必要があり、かつ、パックを位置確定要素に対して押し付ける必要がある。弾性手段の力は、たとえばモーターの回転トルクに依存する。他の例では、図3bに示すように、ポジショニング手段はまた、ほとんど摩擦を伴わずに、ロケーティング位置にパックが入り込むことを可能とする二つのローラー要素8を備える。ポジショニング手段は、ここでは、ロケーティング位置へとパックが入り込むことを可能とするために、ポジショニング手段が軸の周りである程度回転できるように、軸9上で懸架されている。ポジショニング手段の軸はまたスプリング付勢されているが、各回転要素をスプリング付勢することも可能である。こうして、パックは小さな力でロケーティング位置へと入り込むことができる。
【0033】
本発明は上記実施形態に限定されるものではなく、特許請求の範囲に記載された中で、さまざまな付加的変形および変更が可能である。
【符号の説明】
【0034】
1 ロケーティングデバイス
2 湾曲レール
3 回転ディスク
4 ベース部
5 パック凹部
6 ポジショニング手段
7 スプリング
8 ローラー要素
9 軸
10 ロケーティングユニット
11 位置決めフランジ
12 コンベアビーム
13 モーター
14 センサー
15 RFIDヘッド
16 ステアリングレール
17 移動方向
18 位置確定要素
19 ロケーティング位置
20 パック
21 位置決めホイール
【技術分野】
【0001】
本発明はコンベアシステム用のロケーティングデバイスに関する。
【背景技術】
【0002】
工場内で異なるステーション間で物品を移動させるために使用されるもののような輸送デバイスは、たいてい、ベルトあるいはチェーンの形態の輸送トラックを有する。輸送トラックは、垂直側面を備えた溝内に配置される。あるいは、溝の水平上面に配置でき、あるいはその他の様式で配置できる。輸送される物品は、直にあるいは運搬手段(これはまたパレットとして知られている)を介して、輸送トラックに対してスライド可能に配置される。特殊なタイプのパレットがパック(puck)であり、これは、小さなあるいは軽量な物品に適合した円形キャリアである。
【0003】
パレットは輸送デバイスに沿って運ばれるが、これは異なるワークステーションを具備してなる。ワークステーションにおいては、輸送される物品に対して作業を実施できるようにパレットは停止させられる。ある場合には、物品は、それに対して作業が実施されることなく、特定のワークステーションを通過できる。
【0004】
輸送システムが従来型のもの(全てのワークステーションは前後に配置されかつ物品に対する作業は同期的に実施される)である場合、全てのパレットは各ワークステーションにおいて停止する。特定のワークステーションにおいて物品に対して作業が実施されない場合、物品は、それが前進できるまで、そのワークステーションにおいて先行物品に対する作業が準備完了となるまで、そのワークステーションにおいて待機する必要がある。全てのパレットは、この場合、同時に解放され、そして同時に移動する。そうしたシステムの一つの利点は、システムの効率を予測するのが容易であるということである。そうしたシステムの一つの欠点は、著しく柔軟性に欠けることである。ワークステーションでの作業時間が長い場合、全ての物品はその時間は待機する必要がある。したがって、そうしたシステムは、主として、単一の製品あるいは製品の差異が僅かである場合に使用される。
【0005】
他のシステムにおいては、物品に対する作業は非同期的に実施される。すなわち、パレットは、作業が実施されるワークステーションにおいて停止し、そして作業が準備完了となったときに解放される。そうしたシステムにおいては、製品の異なる流通時間を、そしてワークステーションにおける異なる作業時間を補償するために、各ワークステーション間には比較的大きなバッファーが必要となる。
【0006】
ワークステーションにおける異なる作業時間を補償する他の方法は、同じ作業を行う二つ以上のワークステーションを使用することである。それらは、たいてい、互いに近接して配置され、そして物体は、フリーなワークステーションにおいて停止させられる。こうして、システムの流通時間は、システムにおけるボトルネックを回避するために、バランスさせることができる。そうしたシステムにおいて、パレットは、ワークステーションにおいて停止させられ、あるいは作業が実施されることなくワークステーションを通過する。
【0007】
非常に簡素なシステムにおいては、コンベアデバイス上でパレットを停止させ、それを簡単な停止機構を用いてそこで保持すれば十分であろう。これは、充填あるいは取り出しといった簡単な作業が実施される場合には十分である。より高度な作業に関して、パレットおよび/またはワークピースは、通常、メインコンベアからコンベアトラックの側の位置へと方向転換される。こうして、コンベアトラック(これは動き続ける)からの影響を受けることなくワークピースに対して作業を実施できる。
【0008】
ワークステーションは、メインコンベアの側方に配置されたサブコンベアに配置される。そうした解決策は、余分なスペース、余分なサブコンベア、そしてサブコンベアへと物品を方向転換するための手段を必要とする。この解決策は、ある場合には、良好に機能するが、些細な作業に関しては柔軟性に乏しく、しかも複雑である。
【0009】
パレットがワークステーションにおいて停止させられたとき、ワークステーションが作業を実施するために、特別な予め決定された位置でパレットが保持されることが重要である。ワークステーションのロケーティング精度が十分に良くない場合、ワークピースが損傷することがあり、あるいは作業が期待したほど良好でないことがある。パレットおよび/またはワークピースの繰り返し可能な位置決めを実現するために、作業ステーションは、通常、作業中にワークピースを保持する特殊な固定手段を備える。
【0010】
そうした固定手段はたいてい、それがワークピースを保持するためにセンサーに依存して作動させられる停止および特殊な保持手段に到達する前に、パレットおよび/またはワークピースの位置を確定するために多数のセンサーを備える。そうした解決策は、ある場合には、必要以上に複雑になることがある。それゆえ改善の余地があった。
【発明の概要】
【発明が解決しようとする課題】
【0011】
したがって本発明の目的は、コンベアシステム用のロケーティングデバイスを提供することである。
【0012】
本発明のさらなる目的は、パックを方向転換しかつそれを特定の位置にて保持できるロケーティングデバイスを提供することである。本発明の他の目的は、ロケーティングデバイスを備えたコンベアシステムを提供することである。
【課題を解決するための手段】
【0013】
本発明に基づく課題の解決策は、請求項1の特徴部に記載されている。請求項11には有利なコンベアシステムが記載されている。その他の請求項には有利な実施形態およびロケーティングデバイスのさらなる展開が記載されている。
【0014】
ベース部と、レールセクションと、ベース部に回転可能に支持されると共にパック凹部を有する回転ディスクとを備えた、コンベアシステムにおけるロケーティング位置でパックを保持するためのロケーティングデバイスにおいて、本発明の目的は、ロケーティングデバイスが、回転ディスクのパック凹部とレールセクションにおけるポジショニング手段との間にロケーティング位置を具備してなること、および、ロケーティングデバイスは、ロケーティング位置でパックを保持するよう構成された弾性手段を具備してなることによって達成される。
【0015】
本発明に基づくロケーティングデバイスのこの第1実施形態によれば、コンベアトラック側方の予め決定された位置へとパックを方向転換でき、かつ、この位置でパックをほじできるロケーティングデバイスが提供される。そうしたロケーティングデバイスによれば、回転ディスクは、コンベアトラックに隣接するロケーティング位置へとコンベアトラックからまずパックを方向転換し、そして、その後、パックのワークピースに作業が実施されている間、この固定された、予め決定されたロケーティング位置にてパックを保持する。こうして、ロケーティング位置へとパックを輸送する外的運搬手段、およびこの位置でパックを保持する外的保持手段は不要である。こうして、簡単かつコスト効率に優れたロケーティングデバイスが実現される。ロケーティングデバイスは、回転ディスクは別として、メンテナンスを必要とする可動部品を持たない。
【0016】
本発明に係るロケーティングデバイスは、一つ以上の弾性要素によってパックをロケーティング位置で保持する。弾性要素は異なるタイプのスプリング、たとえばスチールスプリング、あるいはエラストマー要素であってもよい。弾性要素は、回転ディスクに、あるいはレールに設けられたポジショニング手段に設けることができる。弾性要素はパックを位置確定要素に向かって押し付ける。このため、ロケーティング位置の繰り返し精度が極めて高い。
【0017】
ある実施形態では、弾性手段が回転ディスクに設けられる。位置確定要素がレールに搭載されたポジショニング手段に設けられる。この実施形態では、位置確定要素は固定される。この解決策は、回転ディスクの精度に関係のないロケーティング位置の高い繰り返し精度を実現する。こうして比較的安価なデコーダーが回転ディスクのために使用できる。なぜなら、回転ディスクの停止位置の偏差はロケーティング位置に影響を与えないからである。回転ディスクの設計に依存して、回転ディスクの停止位置に関する数度の偏差は許容可能である。
【0018】
第2実施形態では、弾性要素がレールのポジショニング手段に設けられる。位置確定要素は、ここでは、回転ディスクのパック凹部内に設けられる。この実施形態では、ロケーティング位置の繰り返し精度は回転ディスクの精度に依存する。ロケーティング位置の必要な繰り返し精度に依存して、適当な回転デコーダーが回転ディスクのために選ばれる。1/10度ないし1度の範囲内にある回転ディスクの停止位置に関する精度が好ましい。
【0019】
以下、図示する実施形態を参照して、本発明についてさらに詳しく説明する。
【図面の簡単な説明】
【0020】
【図1】本発明に基づくロケーティングユニットを示す図である。
【図2】本発明に基づくロケーティングデバイスの第1実施形態を示す図である。
【図3a】本発明に基づくロケーティングデバイスの第2実施形態の実例を示す図である。
【図3b】本発明に基づくロケーティングデバイスの第2実施形態の他の実例を示す図である。
【発明を実施するための形態】
【0021】
以下で説明するさらなる展開を具備した本発明の実施形態は単なる実例と見なすべきであり、特許請求の範囲の記載によってもたらされる保護範囲を決して制限するものではない。
【0022】
図1は本発明に基づくコンベアシステム用のロケーティングユニット10を示し、かつ、図2はロケーティングユニットにおいて使用されるロケーティングデバイスの第1実施形態を示している。ロケーティングユニット10は、この実例では、ロケーティングデバイス1、コンベアビーム12、モーター13、位置センサー14、RFID読み取り/書き込みヘッド15およびステアリングレール16を具備してなる。ロケーティングユニット10は、試験管、小瓶あるいはその他の容器といったワークピースを保持するパック20を扱うよう構成される。
【0023】
ロケーティングユニットは、コンベアシステム内に搭載されるよう構成される。コンベアビームは他のコンベアビームに対して接続され、かつ、コンベアチェーンは、エンドレスなコンベアトラックが得られるようにビームに対して設置される。モーターは、パックが回転ユニットに到着したとき回転ディスクを回転させる。モーターは独立していても、ロケーティングユニットにおけるセンサーによってのみ制御されてもよく、あるいは完全なコンベアシステムの制御システムに対して接続されていてもよい。センサー14は、パックが回転ディスクのパック凹部内に到達したどうかを検出する。センサーはモーターを直に制御してもよく、あるいは制御システムに信号を送信してもよい。RFID読み取り/書き込みヘッドはパックに設けられたRFIDタグを検出でき、この結果、各パックが識別され、かつ/または特定のデータがRFIDに蓄積される。コンベアシステムは公知であり、詳しくは説明しない。
【0024】
図1および図2に示すロケーティングデバイスは、コンベアビームに搭載されるよう構成されたベース部4を具備してなる。ベース部が、コンベアチェーンを具備してなるコンベアビームに搭載されたとき、ベース部の上面の高さは、パックが問題なくコンベアチェーンからベース部上のロケーティング位置19へと方向転換できるように、コンベアチェーンの高さと一致する。ロケーティング位置19は、パックのワークピースに対する作業の間、パック20が保持されることになる位置である。ロケーティングデバイスはさらに、コンベアチェーンから方向転換されたとき、パックがロケーティングデバイスから落下するのを阻止する湾曲レール2を具備してなる。パックは、このパックのサイズに対応するパック凹部5を具備してなる回転ディスク3によって方向転換される。パックがロケーティングデバイスに到達したとき、回転ディスクは、パックがパック凹部内に入り込むアイドル位置に置かれる。
【0025】
センサーはパックがパック凹部内の適所に存在することを検出し、そしてモーターが回転ディスクをパックと共に回転させる。図1では、回転ディスクはアイドル位置で示されている。図2では、回転ディスクはパックがロケーティング位置19に存在する状態で示されている。図示する実施形態では、コンベアトラックは矢印17の方向に動く。回転ディスクは、この例では、ロケーティング位置へとパックを運ぶために、時計回りに回転する。これに代えて、パックをロケーティング位置へと運ぶべきでない場合には、回転ディスクは、パックをロケーティングデバイスを素通りさせるために、反時計周りに回転する。パックは、その後、それがコンベアトラック上で解放されるまで、ステアリングレール16に当接状態で支持される。
【0026】
パックがロケーティング位置に配置されるべきとき、回転ディスクはパックがロケーティング位置に配置されるまで回転する。この位置は予め決定され、そしてモーターの検出器は回転ディスクがこの位置で停止するように較正される。ロケーティング位置でパックを保持するために、ポジショニング手段6がレールに設けられる。ポジショニング手段は、それに対してパックが当接する位置確定要素18を具備してなる。図示する実施形態では、位置確定手段はV字形ブロックの二つの側面であるが、他の形式の位置確定手段も使用可能である。ポジショニング手段はロケーティングデバイスに固定されるが、これは、ロケーティング位置の位置繰り返し精度が極めて良好であることを意味する。回転ディスクは、ポジショニング手段に対してパックを押し付ける弾性手段を備える。こうして、各パックは、毎回、回転ディスクの停止位置の精度に関係なく、ロケーティングデバイスにおいて同じ位置を獲得する。回転ディスクの停止位置は、それゆえ、パック位置の繰り返し精度に影響を与えることなく、ある程度、ずれてもよい。
【0027】
回転ディスクにおける弾性手段は、図示する実施例では、スチール製の連続したリーフスプリングである。他の形状のリーフスプリングを使用すること、二つのリーフスプリングを使用すること、あるいは他の種類のスプリングを使用することも可能である。弾性手段としてエラストマー要素を使用することも可能である。弾性手段はパックがパック凹部内に入り込むのを阻んではならないが、ポジショニング手段に対してパックを押し付けることが可能でなければならない。弾性手段の力は、たとえばモーターの回転トルクに依存する。
【0028】
パックがロケーティング位置にあるとき、パック内のワークピースに対して作業を実施できる。そうした作業としては、試験管を充填すること、試験管からサンプルを抽出すること、医薬品ボトルを充填すること、試験管を挿入することあるいは取り出すことが挙げられる。パックが弾性手段によって適所にて保持されるので、コンベアトラックの面内でワークピースに対して荷重が加えられるべきではない。下向き垂直方向の荷重は許容される。パックのベースの溝に対応する位置決めフランジ11をポジション手段に設けることによって、また、上向き鉛直方向の荷重が許容される。回転ホイール3はまた、図2に破線で示すように、位置決めホイール21を備える。位置決めホイールはまた、パックのベースの溝に対応し、そしてまた上向き鉛直方向の力を受けるのを助ける。上向き鉛直方向における荷重性能を向上させるために、回転ディスクのパック凹部に、パックのベースの溝に対応するフランジを設けることも可能である。
【0029】
ワークピースへの作業が完了したとき、回転ディスクは、パックが解放位置(これは次のステーションへとコンベアトラック上でつながっている)に達するまで時計回りに回転し続ける。回転ディスクは、続いて、次のパックをピックアップするために、アイドル位置まで回転して戻る。回転ディスクはパック凹部を一つしか持たないので、ロケーティングデバイスには余分な停止機能は必要ない。なぜなら、他のパックはロケーティングデバイスに入り込むことができないからである。ロケーティングデバイスはまた、キューイング(queuing)機能を提供するが、これによれば、ロケーティングデバイスはパックを整列させ、そしてシステムが必要とするとき、それをロケーティングデバイスを通過させる。
【0030】
本ロケーティングデバイスの一つの利点は、全てのパックがロケーティングデバイスのロケーティング位置を通過する必要はないということである。これによって、システムの能力を高めるために、コンベアシステムをスケールアップすることが可能となる。コンベアトラック上に前後に二つのロケーティングを配置することによって、第1のロケーティングデバイスは、全ての第2のパックを第2のロケーティングデバイスへと送り込むことができ、かつ、作業のために第1のロケーティングデバイスのロケーティング位置へと全ての他のものを送り込むことができる。第2のロケーティングデバイスは、第1のロケーティング位置に存在していたパックを通過させる。
【0031】
図3aに示すロケーティングデバイスの第2実施形態においては、ポジショニング手段は、回転ディスクのパック凹部の内面に対してパックを押し付ける弾性手段7を備える。ロケーティング位置の繰り返し精度を改善するために、パック凹部に、位置確定要素18を設けることが可能である。パック凹部に位置確定要素18を設けることが可能である。位置確定要素は、好ましくは、パック凹部の内面の二つの突起であり、この結果、パックが位置確定要素に当接するときに良好に確定されたロケーティング位置が実現される。この実施形態では、回転ディスクの停止位置の精度は第1実施形態よりも重要であり、それは、ロケーティング位置の繰り返し精度を確定する。ワークピースに施される作業に依存して、停止位置に精度は相応に選択可能である。
【0032】
ポジショニング手段における弾性手段はまた、スチールからなる連続リーフスプリングであってもよい。他の形状のリーフスプリングを使用すること、二つのリーフスプリングを使用すること、あるいは他のタイプのスプリングを使用することも可能である。弾性手段としてエラストマー要素を使用することも可能である。弾性手段はパックがロケーティング位置に入り込むことを可能とする必要があり、かつ、パックを位置確定要素に対して押し付ける必要がある。弾性手段の力は、たとえばモーターの回転トルクに依存する。他の例では、図3bに示すように、ポジショニング手段はまた、ほとんど摩擦を伴わずに、ロケーティング位置にパックが入り込むことを可能とする二つのローラー要素8を備える。ポジショニング手段は、ここでは、ロケーティング位置へとパックが入り込むことを可能とするために、ポジショニング手段が軸の周りである程度回転できるように、軸9上で懸架されている。ポジショニング手段の軸はまたスプリング付勢されているが、各回転要素をスプリング付勢することも可能である。こうして、パックは小さな力でロケーティング位置へと入り込むことができる。
【0033】
本発明は上記実施形態に限定されるものではなく、特許請求の範囲に記載された中で、さまざまな付加的変形および変更が可能である。
【符号の説明】
【0034】
1 ロケーティングデバイス
2 湾曲レール
3 回転ディスク
4 ベース部
5 パック凹部
6 ポジショニング手段
7 スプリング
8 ローラー要素
9 軸
10 ロケーティングユニット
11 位置決めフランジ
12 コンベアビーム
13 モーター
14 センサー
15 RFIDヘッド
16 ステアリングレール
17 移動方向
18 位置確定要素
19 ロケーティング位置
20 パック
21 位置決めホイール
【特許請求の範囲】
【請求項1】
コンベアシステムにおけるロケーティング位置でパックを保持するためのロケーティングデバイス(1)であって、ベース部(4)と、レールセクション(2)と、前記ベース部(4)において回転可能に支持されかつパック凹部(5)を有する回転ディスク(3)と、を具備してなり、前記ロケーティングデバイスは、前記回転ディスク(3)の前記パック凹部(5)と前記レールセクションにおけるポジショニング手段(6)との間にロケーティング位置を具備してなり、かつ、前記ロケーティングデバイスは、前記ロケーティング位置においてパックを保持するよう構成された弾性手段(7)を具備してなることを特徴とするロケーティングデバイス。
【請求項2】
前記弾性手段(7)は、一つ以上のリーフスプリングであることを特徴とする請求項1に記載のデバイス。
【請求項3】
前記弾性手段(7)は、ゴムまたはプラスチックからなる一つ以上のエラストマー要素であることを特徴とする請求項1に記載のデバイス。
【請求項4】
前記弾性手段(7)は、前記回転ディスク(3)のパック凹部(5)内に設けられることを特徴とする請求項1ないし請求項3のいずれか1項に記載のデバイス。
【請求項5】
前記弾性手段(7)は、前記ポジショニング手段(6)上に設けられることを特徴とする請求項1ないし請求項3のいずれか1項に記載のデバイス。
【請求項6】
前記ポジショニング手段(6)は前記弾性手段(7)によって懸架されることを特徴とする請求項5に記載のデバイス。
【請求項7】
前記ポジショニング手段(6)はさらに、二つの回転要素(8)を具備してなることを特徴とする請求項5または請求項6に記載のデバイス。
【請求項8】
前記ポジショニング手段(6)は軸(9)上で回転可能に懸架されることを特徴とする請求項5ないし請求項7のいずれか1項に記載のデバイス。
【請求項9】
前記デバイスは、コンベアビームの一部に対して、それが、既存のコンベアシステムにおけるコンベアトラック内に組み込むことができるロケーティングユニットを形成するように設置されることを特徴とする請求項1ないし請求項8のいずれか1項に記載のデバイス。
【請求項10】
前記デバイスはさらに、前記パック凹部内のパックの存在を検出するよう構成された光電センサーを具備してなることを特徴とする請求項9に記載のデバイス。
【請求項11】
前記デバイスはさらに、RFIDタグを備えたパックを識別するよう構成されたRFID読み取り/書き込みユニットを具備してなることを特徴とする請求項9または請求項10に記載のデバイス。
【請求項12】
請求項1ないし請求項11のいずれか1項に記載のロケーティングデバイスを具備してなるコンベアシステム。
【請求項1】
コンベアシステムにおけるロケーティング位置でパックを保持するためのロケーティングデバイス(1)であって、ベース部(4)と、レールセクション(2)と、前記ベース部(4)において回転可能に支持されかつパック凹部(5)を有する回転ディスク(3)と、を具備してなり、前記ロケーティングデバイスは、前記回転ディスク(3)の前記パック凹部(5)と前記レールセクションにおけるポジショニング手段(6)との間にロケーティング位置を具備してなり、かつ、前記ロケーティングデバイスは、前記ロケーティング位置においてパックを保持するよう構成された弾性手段(7)を具備してなることを特徴とするロケーティングデバイス。
【請求項2】
前記弾性手段(7)は、一つ以上のリーフスプリングであることを特徴とする請求項1に記載のデバイス。
【請求項3】
前記弾性手段(7)は、ゴムまたはプラスチックからなる一つ以上のエラストマー要素であることを特徴とする請求項1に記載のデバイス。
【請求項4】
前記弾性手段(7)は、前記回転ディスク(3)のパック凹部(5)内に設けられることを特徴とする請求項1ないし請求項3のいずれか1項に記載のデバイス。
【請求項5】
前記弾性手段(7)は、前記ポジショニング手段(6)上に設けられることを特徴とする請求項1ないし請求項3のいずれか1項に記載のデバイス。
【請求項6】
前記ポジショニング手段(6)は前記弾性手段(7)によって懸架されることを特徴とする請求項5に記載のデバイス。
【請求項7】
前記ポジショニング手段(6)はさらに、二つの回転要素(8)を具備してなることを特徴とする請求項5または請求項6に記載のデバイス。
【請求項8】
前記ポジショニング手段(6)は軸(9)上で回転可能に懸架されることを特徴とする請求項5ないし請求項7のいずれか1項に記載のデバイス。
【請求項9】
前記デバイスは、コンベアビームの一部に対して、それが、既存のコンベアシステムにおけるコンベアトラック内に組み込むことができるロケーティングユニットを形成するように設置されることを特徴とする請求項1ないし請求項8のいずれか1項に記載のデバイス。
【請求項10】
前記デバイスはさらに、前記パック凹部内のパックの存在を検出するよう構成された光電センサーを具備してなることを特徴とする請求項9に記載のデバイス。
【請求項11】
前記デバイスはさらに、RFIDタグを備えたパックを識別するよう構成されたRFID読み取り/書き込みユニットを具備してなることを特徴とする請求項9または請求項10に記載のデバイス。
【請求項12】
請求項1ないし請求項11のいずれか1項に記載のロケーティングデバイスを具備してなるコンベアシステム。
【図1】


【図2】
【図3a】
【図3b】
【図2】
【図3a】
【図3b】
【公開番号】特開2011−207589(P2011−207589A)
【公開日】平成23年10月20日(2011.10.20)
【国際特許分類】
【出願番号】特願2010−77474(P2010−77474)
【出願日】平成22年3月30日(2010.3.30)
【出願人】(502047040)フレックスリンク コンポーネンツ アーベー (3)
【Fターム(参考)】
【公開日】平成23年10月20日(2011.10.20)
【国際特許分類】
【出願日】平成22年3月30日(2010.3.30)
【出願人】(502047040)フレックスリンク コンポーネンツ アーベー (3)
【Fターム(参考)】
[ Back to top ]