
ロッキング関節接合機構
【課題】ツールアセンブリを1つ以上の位置において選択的にロッキングするように構成されている関節接合機構を有する外科手術ステープラーを提供すること。
【解決手段】外科手術ステープラーが提供され、ハンドルアセンブリ、細長い本体、関節接合可能ツールアセンブリおよび関節接合機構を含む。関節接合機構は、関節接合リンケージに接続されたメインシャフト部材と、メインシャフト部材のシャフト部分を受け取るための開口部を有する保持器と、カムロッキング表面およびロッキングタブを有するカムロックと、ロッキングタブを受け取るためのくぼみを規定するロッキングカバーと、カムロックのカムロッキング表面を係合するように構成されているカム表面を有する関節接合ハンドルとを有する。
【解決手段】外科手術ステープラーが提供され、ハンドルアセンブリ、細長い本体、関節接合可能ツールアセンブリおよび関節接合機構を含む。関節接合機構は、関節接合リンケージに接続されたメインシャフト部材と、メインシャフト部材のシャフト部分を受け取るための開口部を有する保持器と、カムロッキング表面およびロッキングタブを有するカムロックと、ロッキングタブを受け取るためのくぼみを規定するロッキングカバーと、カムロックのカムロッキング表面を係合するように構成されているカム表面を有する関節接合ハンドルとを有する。
【発明の詳細な説明】
【技術分野】
【0001】
(背景)
(技術分野)
本開示は、1つ以上の関節接合部分を有する外科手術器具に関する。より具体的には、本開示は、外科手術器具の関節接合する部分を複数の位置においてロッキングする機構に関する。
【背景技術】
【0002】
(関連技術の背景)
さまざまな器具が閉鎖的処置(すなわち、腹腔鏡、関節鏡、内視鏡)における使用のために改変されてきた。そのような器具は、細長い本体部分を一般的に含む。細長い本体部分は、患者における開口部を通り(すなわち、アクセスポートを通るか、および/または、例えば肛門、口のような生来の開口を通り)延びるように構成されている。
【0003】
閉じられた処置に対して適合されているこれら器具の多くは、細長い本体部分の遠位端部上に搭載された、関節接合可能なツールアセンブリを含む。ツールアセンブリは、細長い本体部分の近位端部上に搭載されたハンドルアセンブリからリモートで制御される。ハンドルアセンブリ上に搭載された関節接合機構は、ツールアセンブリを細長い本体部分に対してリモートで関節接合することを可能にする。一般的に、関節接合機構は、ハンドルアセンブリ上に搭載されたレバーを含む。レバーは、作動されたとき、関節接合リンケージを進行させるか、または後退させる。関節接合リンクは、細長い本体部分を通り延び、動作可能にツールアセンブリに接続される。関節接合リンケージの長手方向の進行および後退は、ツールアセンブリを関節接合させる。ツールアセンブリは、レバーとハンドルとの間の摩擦によってのみ、所望の位置に維持される。このようにして、臨床医が誤ってツールアセンブリを身体内の構造に十分な力によって接触させた場合、力はツールアセンブリを所望の位置からそらさせる。
【発明の概要】
【発明が解決しようとする課題】
【0004】
そのため、ツールアセンブリを1つ以上の位置において選択的にロッキングするように構成されている関節接合機構を有することが有益である。
【課題を解決するための手段】
【0005】
(概要)
したがって、ロッキング交換機構を含む外科手術器具が提供される。
【0006】
例えば、本発明は、以下の項目を提供する。
(項目1)
外科手術ステープラーであって、
ハンドルアセンブリと、
該ハンドルアセンブリから延びる細長い本体と、
該細長い本体の遠位端部上に搭載される関節接合可能ツールアセンブリと、
関節接合機構であって、該関節接合機構は、該ハンドルアセンブリに動作可能に接続され、該ツールアセンブリを1つ以上の位置において、選択的に関節接合することと、しっかりとロッキングすることとを行うように構成されている、関節接合機構と
を備え、該関節接合機構は、
回転するように搭載され、関節接合リンケージに接続されている、メインシャフト部材と、
回転可能に固定された保持器であって、該保持器は、該メインシャフト部材のシャフト部分を受け取るための開口部を有する、保持器と、
該メインシャフト部材の該シャフト部分を受け取るように構成されている穴を有するカムロックであって、該カムロックは、カムロッキング表面とロッキングタブとを有する、カムロックと、
該保持器と該カムロックとの間に配置される付勢部材と、
該ロッキングタブを受け取るためのくぼみを規定するロッキングカバーであって、該くぼみは、非関節接合位置に対応するために位置決めされる中央くぼみを含む、ロッキングカバーと、
該カムロックの該カムロッキング表面を係合するように構成されたカム表面を有する関節接合ハンドルであって、該カムロッキング表面と該カム表面との係合が、該カムロックを該付勢部材の付勢に対抗するように移動させる、関節接合ハンドルと
を有する、外科手術ステープラー。
(項目2)
上記くぼみは、面取りされた表面を有する複数のディバイダーによって規定される、上記項目のいずれかに記載の外科手術ステープラー。
(項目3)
上記複数のディバイダーは、サイズが異なる、上記項目のいずれかに記載の外科手術ステープラー。
(項目4)
上記複数のディバイダーは、中央ディバイダーを含み、該中央ディバイダーは、中央くぼみを規定し、他のディバイダーは、関節接合された位置のためのくぼみを規定する、上記項目のいずれかに記載の外科手術ステープラー。
(項目5)
上記中央ディバイダー上の面取り部は、比較的大きく、関節接合された位置のためのくぼみを規定する該ディバイダーの面取り部は、比較的小さい、上記項目のいずれかに記載の外科手術ステープラー。
(項目6)
上記ロッキングカバーは、半円形の拡張部を有し、該拡張部は、端部を有し、該端部は、上記カムロックと相互接触することと、過度な回転を妨げることとを行うように構成されている、上記項目のいずれかに記載の外科手術ステープラー。
(項目7)
上記関節接合ハンドルは、カットアウトを有し、該カットアウトは、上記シャフト部分上に形成された開口部と一列に並び、該カットアウトは、該関節接合ハンドルを上記メインシャフトに固定するロッキングピンをさらに含み、該カットアウトは、該関節接合ハンドルが該メインシャフトを回転させる前に旋回することを可能にする、上記項目のいずれかに記載の外科手術ステープラー。
(項目8)
ヨークは、上記メインシャフト部材および上記関節接合リンケージに取り付けられる、上記項目のいずれかに記載の外科手術ステープラー。
【0007】
(摘要)
外科手術ステープラーが提供され、ハンドルアセンブリ、細長い本体、関節接合可能ツールアセンブリおよび関節接合機構を含む。関節接合機構は、関節接合リンケージに接続されたメインシャフト部材と、メインシャフト部材のシャフト部分を受け取るための開口部を有する保持器と、カムロッキング表面およびロッキングタブを有するカムロックと、ロッキングタブを受け取るためのくぼみを規定するロッキングカバーと、カムロックのカムロッキング表面を係合するように構成されているカム表面を有する関節接合ハンドルとを有する。
【0008】
ロッキング関節接合機構の実施形態が本明細書において図面を参照して開示される。
【図面の簡単な説明】
【0009】
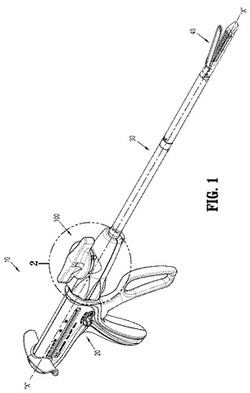
【図1】図1は、本開示の実施形態に従うロッキング関節接合機構を含む外科手術ステープラーの透視図である。
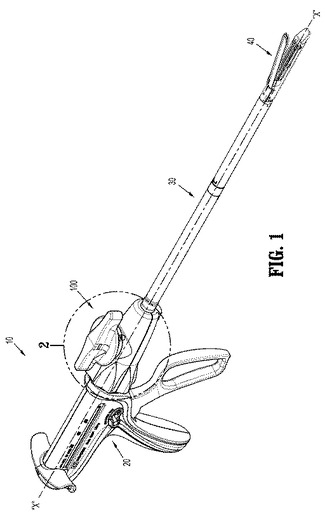
【図2】図2は、図1の部分2の拡大透視図である。
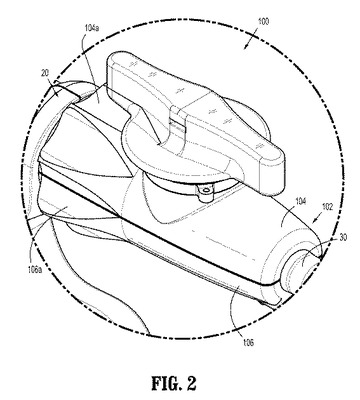
【図3】図3は、図1のロッキング関節接合機構の分解組み立て透視図である。
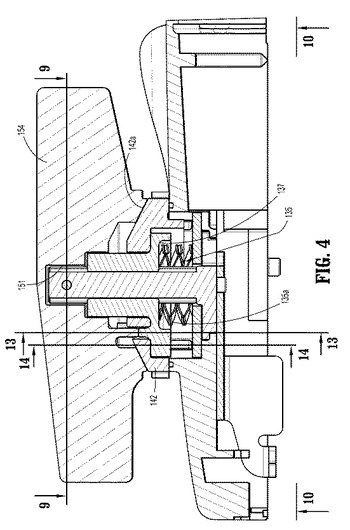
【図4】図4は、図1のロッキング関節接合機構の断面側面図である。
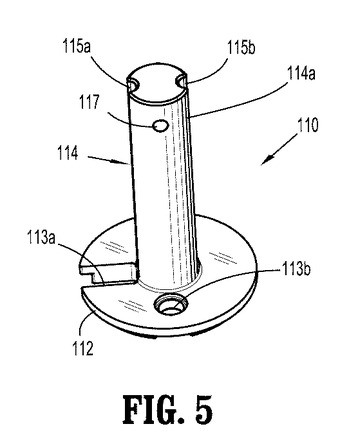
【図5】図5は、図1のロッキング関節接合機構のメインシャフトの透視図である。
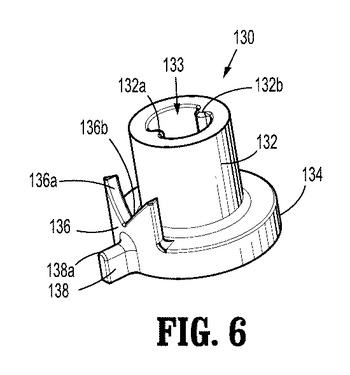
【図6】図6は、図1のロッキング関節接合機構のカムロックの透視図である。
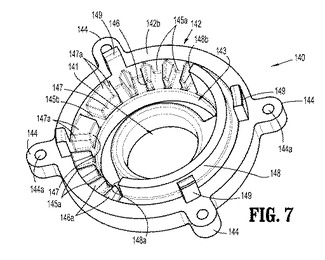
【図7】図7は、図1のロッキング関節接合機構のロッキングカバーの遠位表面の透視図である。
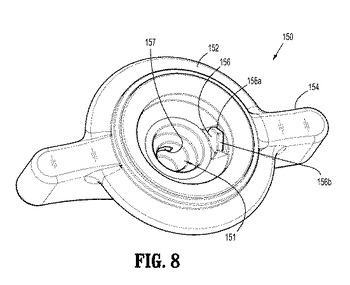
【図8】図8は、図1のロッキング関節接合機構の関節接合レバーの遠位表面の透視図である。
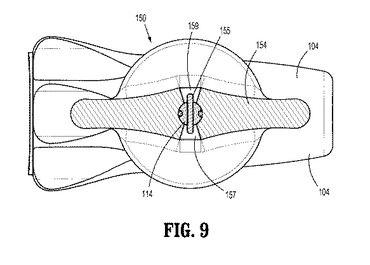
【図9】図9は、図4の線9−9に沿って取られた図1のロッキング関節接合機構の断面上面図である。
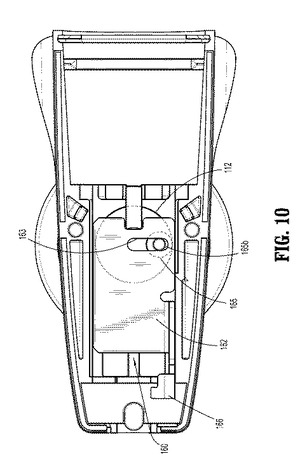
【図10】図10は、図4の線10−10に沿って取られた図1のロッキング関節接合機構の底面図である。
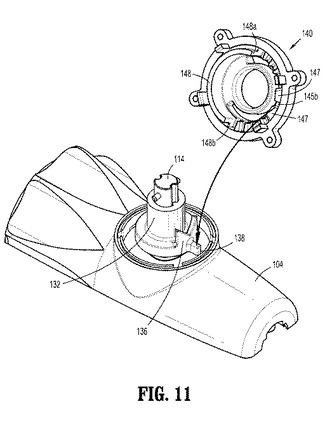
【図11】図11は、図1のロッキング関節接合機構から分離された図7のロッキングカバーの透視図である。
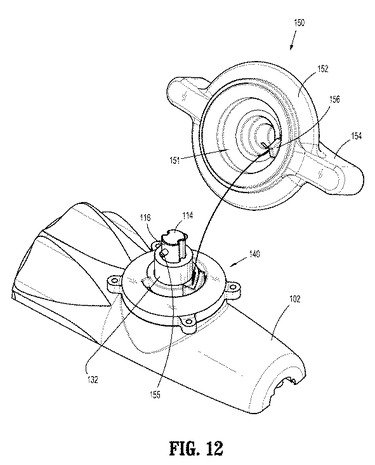
【図12】図12は、図1のロッキング関節接合機構から分離された図8の関節接合レバーの透視図である。
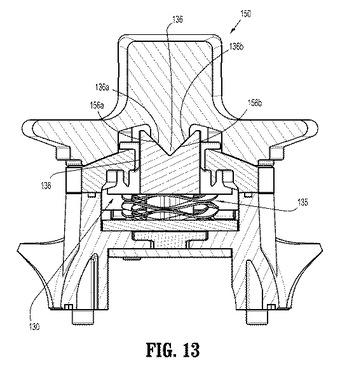
【図13】図13は、図4の線13−13に沿って取られた図1のロッキング関節接合機構の断面端面図である。
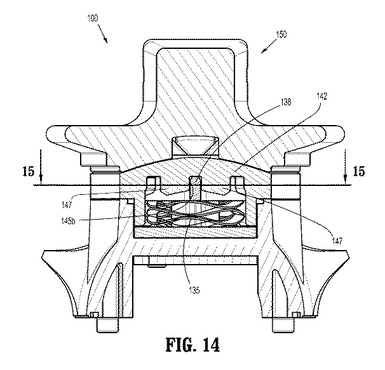
【図14】図14は、図4の線14−14に沿って取られた図1のロッキング関節接合機構の断面端面図である。
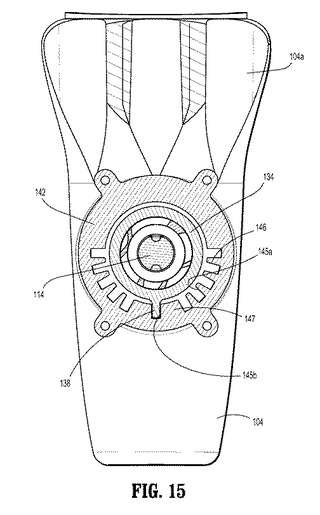
【図15】図15は、図14の線15−15に沿って取られた図1のロッキング関節接合機構の断面上面図である。
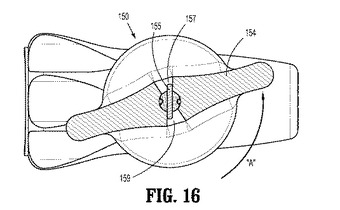
【図16】図16は、関節接合レバーが第二の位置にある、図9の断面上面図である。
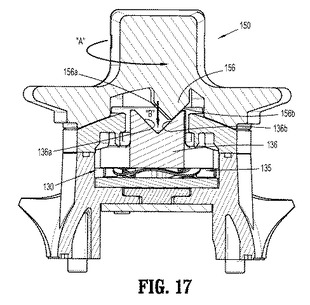
【図17】図17は、関節接合レバーが第二の位置にある、図13の断面端面図である。
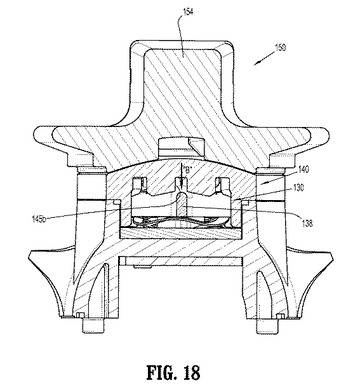
【図18】図18は、関節接合レバーが第二の位置にある、図14の断面端面図である。
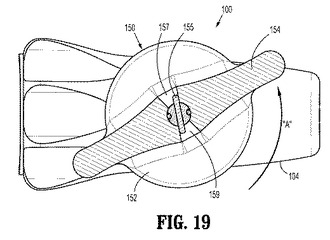
【図19】図19は、関節接合レバーが第三の位置にある、図9および図16の断面上面図である。
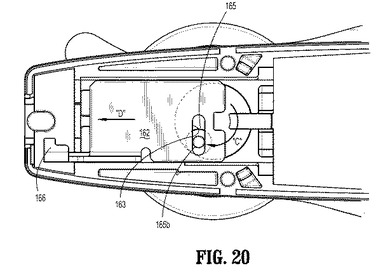
【図20】図20は、関節接合レバーが第三の位置にある、図1のロッキング関節接合機構の底面図である。
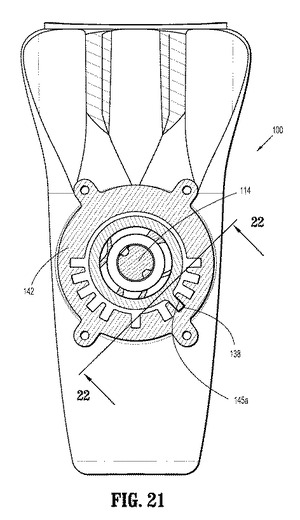
【図21】図21は、関節接合機構がロッキングされた位置にある、図15の断面上面図である。
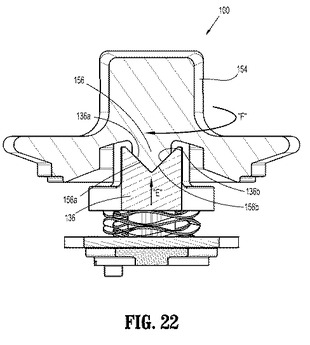
【図22】図22は、図21の線22−22に沿って取られた図1の関節接合レバーの断面側面図である。
【発明を実施するための形態】
【0010】
(詳細な説明)
本開示のロッキング関節接合機構の実施形態がここで図面を参照して詳細に説明される。類似の数字は、複数の図の各々において、同一または対応する要素を指す。当分野において共通であるが、用語「近位」は、ユーザーまたはオペレーター(すなわち、外科医または内科医)により近い一部または構成要素を指し、用語「遠位」は、ユーザーからより遠い一部または構成要素を指す。本開示の関節接合機構は、外科手術ステープリングデバイスに関するものとして説明されるが、本開示の関節接合機構は、他の外科手術デバイスを用いた使用に対して改変され得る。
【0011】
図1〜22は、本開示に従うロッキング関節接合機構の実施形態を例示し、全体がロッキング関節接合機構100として示される。図1において示され、下で述べられるように、ロッキング関節接合機構100は、外科手術ステープラー10に組み込まれる。外科手術ステープラー10は、ハンドルアセンブリ20と、ハンドルアセンブリ20から延びる細長い本体30と、細長い本体30の遠位端部上に搭載されたツールアセンブリ40とを含む。外科手術ステープラー10の構造および機能は、本明細書においてロッキング関節接合機構100を完全に開示するために必要な程度に説明されるに過ぎない。外科手術ステープラー10に類似した外科手術ステープラーの構造および機能のより詳細な説明は、Millimanらへの共有に係る米国特許第5,865,361号を参照されたい。その内容は、本明細書において参照することによって全体が援用される。
【0012】
ここで、図1〜3を参照すると、関節接合機構100は、上部および下部ハウジングまたはノブ半分部104、106を有する関節接合ハウジング102を含む。上部および下部ハウジング半分部104、106は、ハンドルアセンブリ20の遠位端部および細長い本体30の近位端部の周りに受け取られるように構成されている。関節接合ハウジング102は、細長い本体30が長手方向軸「x」(図1)の周りを回転することを容易にするように構成されている。上部および下部ハウジング半分部104、106の各々は、ふしを有する近位端部104a、106aを含む。ふしを有する近位端部104a、106aは、ユーザーによって動作可能に係合されるように構成されている。上部ハウジング半分部104は、上部ハウジング半分部104を通り延びる開口部105(図3)を規定する。上部ハウジング半分部104は、開口部105を放射状に外側方向に延びる複数のスロット107をさらに規定する。示されるように、上部ハウジング半分部104は、4つのスロット107を含むが、上部ハウジング半分部104は、4つより多いまたは少ないスロット107を規定し得る。
【0013】
ここで、図3および図4を参照すると、関節接合機構100は、メインシャフト部材110、保持器120、カムロック130、ロッキングカバー140、関節接合レバー150およびチャネルヨーク160をさらに含む。上で述べたように、用語「近位」は、ユーザーまたはオペレーターにより近い部分または構成要素を指す。ユーザーは、図3および図4において示されるように、関節接合機構100の関節接合レバー150を係合するので、ロッキング関節接合機構100の近位端部にある関節接合レバー150へ参照がなされ、チャネルヨーク160は、ロッキング関節接合機構100の近位端部に設けられる。
【0014】
図3、図4および図5をさらに参照して、メインシャフト部材110は、土台部分112と、土台部分112から延びるシャフト部分114とを含む。土台部分112は、上部ハウジング半分部104の開口部105内に回転可能に受け取られるように構成されている。土台部分112は、放射状に外側方向に延びるスロット113aを含む(スロット113a)。センサーキャップ(たる形状の部分)は、軸方向にストロークを打ち、メインシャフトの放射状部分におけるスロットを係合し、係合解除する突出形体を含む。スロット113aの目的は、下で述べられる。土台部分112は、カム部材をさらに含む。より具体的には、開口部113bがカム部材を通して形成され、近位方向に延びるカムピン165(図3)の165aの一部を係合するように構成されている(下でさらに詳細に述べられる)。メインシャフト部材110のシャフト部分114は、長手方向に延びる一対のノッチ115a、115bを含む。ノッチ115a、115bは、対向した実質的にU形状のくぼみを形成する。くぼみは、シャフト部分114の長さを延びる。くぼみ115a、115bは、同じU形状プロファイルを有して示されるが、代わりの形状のプロファイルを含み得るか、および/またはプロファイルは、形状が異なり得る。シャフト部分114は、シャフト部分114の近位端部114aを放射状に通り延びる開口部117をさらに含む。下でさらに詳細に述べられるように、開口部117は、ピン155(図3)を受け取るように構成されており、関節接合ハンドルまたはレバー150をメインシャフト110に固定する。
【0015】
引き続き図3および図4を参照すると、保持器120は、実質的に平面なディスク122を形成する。ディスク122は、複数の放射状に外側方向に延びるタブ124を含む。示されるように、ディスク122は、上部ハウジング半分部104における開口部105の周りに形成されたスロット107に数および配置が対応する4つのタブ124を含む。タブ124の数および間隔は、上部ハウジング半分部104において形成されたスロット107の数および配置に応じて変わり得る。ディスク122は、スロット107より少ないタブ124を含み得ることが予期される。保持器120は、ディスク122の中央を通り延びる開口部123をさらに含む。開口部123は、メインシャフト部材110のシャフト部分114を受け取るサイズとされる。
【0016】
ここで、図3、図4および図6を参照すると、カムロック130は、実質的に環状な本体132およびフランジ部分134を含む。環状な本体132は、環状な本体132を通り延びる長手方向の穴133を規定する。穴133は、メインシャフト部材110のシャフト部分114を受け取るように構成されている。環状な本体132は、一対の隆起部132a、132bを含む。隆起部132a、132bは、穴133の長さを延びる。隆起部132a、132bは、メインシャフト110のシャフト部分114上に形成されたノッチ115a、115bに対応する。カム部材136は、カムロック130のフランジ部分134上に形成される。カム部材136は、環状な本体132から放射状に一定の距離を置かれ、フランジ部分134から近位方向に延びる。カム部材は、カムロッキング表面136a、136bを含む。ロッキングタブ138は、カム部材136から放射状に外側方向に延びる。ロッキングタブ138は、丸みのある近位表面138aを含む。フランジ部分134は、くぼみ137(図4)をフランジ部分134の遠位表面において規定する。くぼみ137は、付勢部材135の近位端部135aを受け取るように構成されている。下でさらに詳細に述べられるように、付勢部材135は、保持器120とカムロック130との間のメインシャフト110のシャフト部分114の周りに受け取られるように構成されている。示されるように、付勢部材135は、ウェーブスプリングを含むが、付勢部材135は、カムロック130を保持器120から離すように選択的に付勢する能力を有する任意の装置を含み得る。ウェーブスプリングは、ロープロファイルを含み、それによって、付勢部材135を受け取るスペースであり、カムロック130と保持器120との間に要求されるスペースを最小化する。
【0017】
ここで、図3、図4および図7を参照すると、ロッキングカバー140は、近位表面142aおよび遠位表面142b(図7)を有する実質的に環状な部材142を規定する。近位表面142aは、関節接合ハンドルまたはレバー150を係合および安定するように構成されている。示されるように、近位表面142aは傾いているが、他の構成が関節接合レバー150を安定させるために採用され得る。複数のフランジ144は、ロッキングカバー140を関節接合ハウジング102の上部ハウジング半分部104に固定するために、環状な部材142から放射状に外側方向に延びる。超音波溶接、もどり止め、バヨネットロック、接着剤などのような、カバーを取り付ける他の方法が用いられ得る。示されるように、ロッキングカバー140は、環状な部材142の周りに均等に一定の距離を置かれた4つのフランジ144を含む。ロッキングカバー140は、4つより多いまたは少ないフランジ144を含み得、フランジ144は、環状な部材142の周りに均等に一定の距離を置かれる場合か、または置かれない場合がある。示されるように、各フランジ144は、アパーチャ144aを規定する。アパーチャ144aは、スクリューまたは他のファスナー留めデバイスを受け取るように構成されている。あるいは、フランジ144は、ロッキングタブを含み得るか、または、そうでない場合、フランジ144は、関節接合ハウジング102の上部ハウジング半分部104をしっかりと係合するように構成され得る。
【0018】
特に図7を参照すると、環状な部材142は、環状な部材142を通り延びる長手方向の穴141と、長手方向の穴141から放射状に一定の距離を置かれた半円形のカットアウト143とを規定する。下でより詳細に述べられるように、カットアウト143は、カムロック130のカム部材136をスライドして受け取るように構成されている。環状な部材142の遠位表面142bは、複数のくぼみ145aを含む。複数のくぼみ145aは、半円形のカットアウト143の第一および第二の端部に沿って半円形のカットアウト143から放射状に外側方向に延びる。中央くぼみ145bは、半円形のカットアウト143の中間点に形成される。くぼみ145aおよび145bの各々は、カムロック130のロッキングタブ138を受け取るように構成されている。下でより詳細に述べられるように、中央くぼみ145bは、ロッキングタブ138が中央くぼみ145bにおいて受け取られたとき、ツールアセンブリ40が非関節接合位置にある位置に対応する。くぼみ145bは、一対のディバイダー147によって規定され、ディバイダー147は、面取りされた表面147aを有する。くぼみ145aは、ディバイダー146によって規定され、ディバイダー146は、面取りされた表面146aを有する。ディバイダー146は、類似した間隔のくぼみ145aを提供する、示された類似するサイズであり得る。このようにして、ツールアセンブリ40は、均等に増加して関節接合され得る。あるいは、ディバイダー146は、異なるサイズであり得、それによって、結果として、ツールアセンブリ40の不均一な増加関節接合となる。下でさらに詳細に論じられるように、ディバイダー146、147の面取りされた表面146a、147bは、それぞれ、カムロック130のロッキングタブ138をくぼみ145a、145bのうちの1つ内に方向付けるように規定されている。
【0019】
さらに図7を参照すると、半円形の拡張部148が環状な部材142から遠位方向に延びる。拡張部148の第一および第二の端部148a、148bは、関節接合機構100の過度な回転を妨げるためにカムロック130と相互接触するように構成されている。複数のフット149は、環状な部材142の遠位表面142bから遠位方向に延びる。フット149は、上部ハウジング半分部104(図3)における開口部105の周りに形成されたスロット107に、数および場所が対応する。フット149は、上部ハウジング半分部104のスロット107内に受け取られるように構成されており、保持器120のタブ124を係合するように構成されている。
【0020】
ここで、図3、図4、図8および図9を参照すると、関節接合ハンドルまたはレバー150は、円形土台152および細長い係合部分154を含む。関節接合レバー150は、くぼみ151を規定する。くぼみ151は、メインシャフト110のシャフト部分114の近位端部114aを受け取るように構成されており、カムロック130の環状な本体132の周りに受け取られるように構成されている。関節接合レバー150は、くぼみ151内から遠位方向に延びるカム部材156をさらに含む。カム部材156は、カム表面156a、156bを含む。下でさらに詳細に述べられるように、カム表面156a、156bは、カムロック130のカム部材136上に形成されたカムロック表面136a、136bを係合するように構成されている。特に図9を参照すると、関節接合レバー150は、一対の水平方向のカットアウト157、159をさらに規定する。カットアウト157、159は、細長い係合部分154を通り、くぼみ151から放射状に外側方向に延びる。カットアウト157、159は、メインシャフト110のシャフト部分114の近位端部114a上に形成された開口部117と一列に並ぶために位置決めされる。下でさらに詳細に述べられるように、カットアウト157、159は、関節接合レバー150がロッキングピン155と係合する前に、メインシャフト110に対して関節接合レバー150の部分的な回転を可能にするように構成されている。
【0021】
ここで、図3および図4を参照すると、チャネルヨーク160は、水平方向の部分162および垂直方向の部分164を有する実質的にL形状のブラケットである。フランジ166は、垂直方向の部材164から延びている。フランジ166は、関節接合リンケージ(示されていない)を係合するように構成されている。関節接合リンケージは、上で述べられたように、動作可能にツールアセンブリ40に接続される。水平方向の部材162は、スロット163を規定する。スロット163は、カムピン165の、遠位方向に延びる部分165bを受け取るように構成されている。
【0022】
関節接合機構は、外科手術ステープラーのような外科手術器具上に含まれるように構成され得る。関節接合機構は、外科手術ステープラーのセンサー機構と相互接触し得る。外科手術ステープラーは、ステープラーの細長いシャフトを通り延びる構造を含む。管状部材を含み得る構造は、関節接合外科手術ステープリング装填ユニットが細長いシャフトに係合すると、近位方向に交換される。関節接合しない装填ユニットは、管状部材を交換されないように構成されている。センサーキャップは、管状部材の近位端部に配列され、管状部材と一緒に交換される。センサーキャップは、スロット113aにおいて受け取られる突出部を有することによって、センサーキャップが交換されない限り、および交換されるまで、メインシャフト110の動きを妨げる。このようにして、関節接合機構は、関節接合装填ユニットが外科手術ステープラーの細長いシャフトに係合されない限り、動かされ得ない。スロット113aは、装填ユニットが装填されない場合に関節接合機構をロッキングすることと、関節接合装填ユニットが装填された場合に関節接合機構をロック解除することと、非関節接合装填ユニットが装填された場合に関節接合機構をロッキングすることとのために使用される。Millimanらへの米国特許第5,865,361号は、関節接合装填ユニットに相互接触するセンサー機構のセンサー管を開示する。
【0023】
関節接合機構100のアセンブリが、ここで図3〜12を参照して説明される。まず、図1〜3を参照すると、上部および下部ハウジング半分部104、106を外科手術ステープラー10の細長い本体30に取り付ける前に、チャネルヨーク160がハンドルアセンブリ20内に位置決めされる。チャネルヨーク160は、チャネルヨーク160の垂直方向の部材164上に形成されたフランジ166が細長い本体30内から延びる関節接合リンク(示されていない)を係合するように位置決めされる。上で述べたように、関節接合リンクの長手方向の並進は、ツールアセンブリ40を関節接合させる。次いで、上部および下部ハウジング半分部104、106は、細長い本体30の近位端部およびハンドルアセンブリ20の近位端部の周りに一緒にフィットされる。上部および下部ハウジング半分部104、106は、スナップフィット接続、機械ファスナー、接合、接着剤または任意の他の適切な方法によって結合され得る。
【0024】
ここで、図3、図4および図10を参照すると、カムピン165が次にメインシャフト110の土台部分112に固定される。カムピン165の近位部分165aは、土台部分112における開口部113bを通して受け取られる。一実施形態において、カムピン165の近位部分165aが開口部113bを通して受け取られると、近位部分165aは、メインシャフト110の固定されたカムピン165に打ち込まれる。あるいは、機械ファスナーまたは他の適切な方法がカムピン165をメインシャフト110に固定するために用いられ得る。カムピン165が土台部分112の開口部112b内に固定されると、メインシャフト110は、カムピン165の遠位部分165bがチャネルヨーク160の水平方向の部材162において形成されたスロット163内に受け取られるように、上部ハウジング半分部104の開口部105内に位置決めされる。
【0025】
引き続き図3および図4を参照すると、次に、保持器120がメインシャフト110のシャフト部分114にわたり、その周りに配置され、保持器120のディスク122から放射状に外側方向に延びるタブ124が上部ハウジング半分部104の開口部105の周りに形成されたスロット107内に受け取られるように位置決めされる。次に、付勢部材135は、付勢部材135の遠位端部135bが保持器120のディスク122を係合するようにメインシャフト110のシャフト部分114の周りに受け取られる。次いで、カムロック130がシャフト部分114の周りに受け取られる。上で述べたように、カムロック130の環状な本体132は、一対の対向する隆起部132a、132bを含む。隆起部132a、132bは、長手方向の穴133の長さを延びる。隆起部132a、132bは、メインシャフト110のシャフト部分114において形成されたノッチ115a、115bに対応する。カムロック130の隆起部132a、132bをメインシャフト110のそれぞれのノッチ115a、115bと係合することは、カムロック130をメインシャフト110に適切に整列させることを確実にし、さらにカムロック130をメインシャフト110によって位置指示する。このようにして、メインシャフト110の回転は、カムロック130の回転に対応する原因となる。
【0026】
ここで、図3、図4および図11を参照すると、次いで、ロッキングカバー140は、カムロック130のカム部材136が半円形のカットアウト143を通して受け取られるようにメインシャフト110のシャフト部分114の周りにカムロック130の環状な本体132にわたり受け取られる。図11においてみられるように、まず、ロックカバー140をカムロック130に係合すると、付勢部材135は、カムロック130のロッキングタブ138がディバイダー147の間に形成されたくぼみ145b内に受け取られるように、カムロック130をロッキングカバー140の方へ付勢する。ロッキングカバー140は、上で述べられた上部ハウジング半分部104に固定される。
【0027】
図3、図4、図9および図12を参照すると、次に、関節接合レバー150は、関節接合レバー150の土台152上に形成されたカム部材156がカムロック130のカム部材136を係合し、シャフト114の近位端部114a上に形成された開口部117が関節接合レバー150の係合部分154において形成された水平方向のカットアウト157、159に一列に並ぶように、シャフト114の近位端部114a上に配置される。次いで、ロッキングピン155がメインシャフト110のシャフト部分114において形成された開口部117を通して挿入され、関節接合ハンドルまたはレバー150をメインシャフト110に固定する。図9においてみられるように、ロッキングピン155は、完全にメインシャフト110のシャフト部分114を通り、水平方向のカットアウト157、159の各々の中へ延びるように構成されている。ロッキングピン155は、開口部117内に摩擦ばめ、接着剤または他の適切な方法によって、固定され得る。
【0028】
ここで、関節接合機構100の使用が図を参照して説明される。まず、図1、図4、図9および図13〜15を参照すると、関節接合機構100が最初の位置において示される。関節接合機構100が最初の位置にある場合、外科手術ステープラー10の細長い本体30およびツールアセンブリ40は、関節接合していない構成または直線構成にある。特に図13を参照すると、最初の位置において、カムロック130のカム部材136上に形成されたカム表面136a、136bは、関節接合レバー150のカム部材156上に形成されたカム表面156a、156bと一列に並べられている。付勢部材135は、カムロック130のカム表面136a、136bを関節接合レバー150のカム表面156a、156bとの係合へ付勢する。この係合は、摩擦に頼らない絶対的ロックを提供する。ここで、特に図14および図15を参照すると、最初の位置において、カムロック130のフランジ134上に形成されたロッキングタブ138がロックカバー140のディバイダー147の間に形成されたくぼみ145b内に受け取られる。中央くぼみ145bを規定するディバイダー上の面取りされた表面146は、比較的大きな面取りであり、機構を非関節接合位置へ戻す。他のディバイダー上の比較的より小さい面取りは、関節接合機構を関節接合された位置にロッキングする。これらの面取りは、関節接合された位置の間を動くために要求されるトルクを最小化するように構成され得る。簡単に図9を参照すると、最初の位置において、ロッキングピン155が関節接合レバー150の係合部分154において形成された水平方向のカットアウト157、159内の中央にある。
【0029】
ここで、図16〜18を参照すると、使用中、関節接合レバー150は、第一の半時計方向に矢印「A」によって示されるように回転させられる。以下に述べることは、関節接合レバー150を第一の半時計方向に回転させることによってツールアセンブリ40の第一の方向における関節接合の原因となることを指すが、関節接合レバー150は、また、第二の時計方向に回転させられ得ることによって、ツールアセンブリ40を第二の方向において関節接合させる。図16においてみられるように、係合部分154において形成された水平方向のカットアウト157、159の構成は、関節接合レバー150がメインシャフト110のシャフト部分114に対して最初の位置(図9)から第二の位置(図16)へ、メインシャフト110を回転させずに、回転させられることを可能にする。図17を参照すると、関節接合レバー150の最初の位置から第二の位置への回転は、関節接合レバー150をカムロック130に対して回転させる。カムロック130に対する関節接合レバー150の回転は、ロッキング部材130のカム部材136に対する関節接合レバー150のカム部材156の動きの原因となる。図17においてみられるように、第一の方向への関節接合レバー150の回転は、カム部材156のカム表面156bをカム表面136bと係合させる。カム表面136bとのカム表面156bの係合は、カムロック130を矢印「B」によって示されるように、関節接合レバー150から遠位方向にさせる。カムロック130の動きは、結果として付勢部材135の圧縮となる。図18を参照すると、カムロック130の遠位の動きは、さらにロッキングカバー140のくぼみ145b内からロッキングタブ138を係合解除させる。
【0030】
ここで、図19〜22を参照すると、関節接合レバー150の係合部分154とのロッキングピン155の係合は、メインシャフト110を関節接合レバー150に位置指示し、それによって、結果として関節接合レバー150のさらなるいずれかの回転となり、メインシャフト110を回転させる。したがって、関節接合レバー150の、矢印「A」によって示されるように、第一の位置への引き続きの回転は、矢印「C」(図20)によって示されるように、同じ第一の方向へメインシャフト11をの回転させる。メインシャフト110の回転は、カム部材165を動かせ、この動きは、矢印「D」によって示されるように、チャネルヨーク160を長手方向に並進させる。上で述べたように、チャネルヨーク160は、関節接合リンケージ(示されていない)に動作可能に接続される。チャネルヨーク160の並進は、関節接合リンケージを並進させ、関節接合リンケージは、細長い本体30に対してツールアセンブリ40(図1)を関節接合させる。
【0031】
関節接合レバー150は、カムロック130のロッキングタブ138がカバーロック140の半円形の拡張部148の端部表面148b(図11)を係合するまで、第一の方向「A」に回転され得る。関節接合レバー150がツールアセンブリ40(図1)を所望の位置に関節接合するために十分回転させられると、関節接合レバー150およびメインシャフト110を回転させるために関節接合レバー150に印加された力が解除される。関節接合レバー150に印加された力が解除された場合、付勢部材135を圧縮する力も解除される。カムロック130に対する付勢部材135の付勢力は、カムロック130を矢印「E」(図22)によって示されるように、関節接合レバー150の方へ近位方向に推進させる。関節接合レバー150の方へのカムロック130の動きは、カム部材136、156のカム表面136a、156a、136b、156bが、それぞれ再係合するので、矢印「F」によって示されるように、関節接合レバー150を第二の方向に回転させる。関節接合レバー150に対するカムロック130の近位方向への動きは、さらに、カムロック130のロッキングタブ138をロックカバー140のくぼみ145aのうちの1つ内に受け取らせる。ロッキングタブ138の丸みのある表面138aおよびディバイダー146の面取りされた表面146aは、くぼみ145aのうちの1つ内でのロッキングタブ138の受け取りを容易にする。面取りされた表面146aは、また、「カチッ」という触覚のフィードバックを提供する。
【0032】
ロッキングタブ138がくぼみ145aのうちの1つ内に受け取られると、ツールアセンブリ40は、関節接合された位置においてロッキングされ、外科手術ステープラー10は、使用の準備ができる。外科手術ステープラー10の使用に続き、ロッキング関節接合機構100は、ツールアセンブリ40を上で述べた態様で別の関節接合された位置に関節接合するために用いられ得るか、またはロッキング関節接合機構100は、ツールアセンブリ40を非関節接合位置(図1)に戻すために用いられ得る。
【0033】
さまざまな改変が本明細書において開示された実施形態になされ得ることが理解される。例えば、上で注意したように、開示された関節接合ロッキング機構は、関節接合の増加した度合いを提供するために改変され得る。関節接合の度合いは、実行されている処置に応じて変わり得る。そのため、上の説明は、限定的として解釈されるべきでなく、特定の実施形態の例示としてのみ解釈されるべきである。当業者は、本明細書に添付の請求項の範囲および精神内の他の改変を予想する。
【符号の説明】
【0034】
10 外科手術ステープラー
20 ハンドルアセンブリ
30 細長い本体
40 ツールアセンブリ
100 ロッキング関節接合機構
【技術分野】
【0001】
(背景)
(技術分野)
本開示は、1つ以上の関節接合部分を有する外科手術器具に関する。より具体的には、本開示は、外科手術器具の関節接合する部分を複数の位置においてロッキングする機構に関する。
【背景技術】
【0002】
(関連技術の背景)
さまざまな器具が閉鎖的処置(すなわち、腹腔鏡、関節鏡、内視鏡)における使用のために改変されてきた。そのような器具は、細長い本体部分を一般的に含む。細長い本体部分は、患者における開口部を通り(すなわち、アクセスポートを通るか、および/または、例えば肛門、口のような生来の開口を通り)延びるように構成されている。
【0003】
閉じられた処置に対して適合されているこれら器具の多くは、細長い本体部分の遠位端部上に搭載された、関節接合可能なツールアセンブリを含む。ツールアセンブリは、細長い本体部分の近位端部上に搭載されたハンドルアセンブリからリモートで制御される。ハンドルアセンブリ上に搭載された関節接合機構は、ツールアセンブリを細長い本体部分に対してリモートで関節接合することを可能にする。一般的に、関節接合機構は、ハンドルアセンブリ上に搭載されたレバーを含む。レバーは、作動されたとき、関節接合リンケージを進行させるか、または後退させる。関節接合リンクは、細長い本体部分を通り延び、動作可能にツールアセンブリに接続される。関節接合リンケージの長手方向の進行および後退は、ツールアセンブリを関節接合させる。ツールアセンブリは、レバーとハンドルとの間の摩擦によってのみ、所望の位置に維持される。このようにして、臨床医が誤ってツールアセンブリを身体内の構造に十分な力によって接触させた場合、力はツールアセンブリを所望の位置からそらさせる。
【発明の概要】
【発明が解決しようとする課題】
【0004】
そのため、ツールアセンブリを1つ以上の位置において選択的にロッキングするように構成されている関節接合機構を有することが有益である。
【課題を解決するための手段】
【0005】
(概要)
したがって、ロッキング交換機構を含む外科手術器具が提供される。
【0006】
例えば、本発明は、以下の項目を提供する。
(項目1)
外科手術ステープラーであって、
ハンドルアセンブリと、
該ハンドルアセンブリから延びる細長い本体と、
該細長い本体の遠位端部上に搭載される関節接合可能ツールアセンブリと、
関節接合機構であって、該関節接合機構は、該ハンドルアセンブリに動作可能に接続され、該ツールアセンブリを1つ以上の位置において、選択的に関節接合することと、しっかりとロッキングすることとを行うように構成されている、関節接合機構と
を備え、該関節接合機構は、
回転するように搭載され、関節接合リンケージに接続されている、メインシャフト部材と、
回転可能に固定された保持器であって、該保持器は、該メインシャフト部材のシャフト部分を受け取るための開口部を有する、保持器と、
該メインシャフト部材の該シャフト部分を受け取るように構成されている穴を有するカムロックであって、該カムロックは、カムロッキング表面とロッキングタブとを有する、カムロックと、
該保持器と該カムロックとの間に配置される付勢部材と、
該ロッキングタブを受け取るためのくぼみを規定するロッキングカバーであって、該くぼみは、非関節接合位置に対応するために位置決めされる中央くぼみを含む、ロッキングカバーと、
該カムロックの該カムロッキング表面を係合するように構成されたカム表面を有する関節接合ハンドルであって、該カムロッキング表面と該カム表面との係合が、該カムロックを該付勢部材の付勢に対抗するように移動させる、関節接合ハンドルと
を有する、外科手術ステープラー。
(項目2)
上記くぼみは、面取りされた表面を有する複数のディバイダーによって規定される、上記項目のいずれかに記載の外科手術ステープラー。
(項目3)
上記複数のディバイダーは、サイズが異なる、上記項目のいずれかに記載の外科手術ステープラー。
(項目4)
上記複数のディバイダーは、中央ディバイダーを含み、該中央ディバイダーは、中央くぼみを規定し、他のディバイダーは、関節接合された位置のためのくぼみを規定する、上記項目のいずれかに記載の外科手術ステープラー。
(項目5)
上記中央ディバイダー上の面取り部は、比較的大きく、関節接合された位置のためのくぼみを規定する該ディバイダーの面取り部は、比較的小さい、上記項目のいずれかに記載の外科手術ステープラー。
(項目6)
上記ロッキングカバーは、半円形の拡張部を有し、該拡張部は、端部を有し、該端部は、上記カムロックと相互接触することと、過度な回転を妨げることとを行うように構成されている、上記項目のいずれかに記載の外科手術ステープラー。
(項目7)
上記関節接合ハンドルは、カットアウトを有し、該カットアウトは、上記シャフト部分上に形成された開口部と一列に並び、該カットアウトは、該関節接合ハンドルを上記メインシャフトに固定するロッキングピンをさらに含み、該カットアウトは、該関節接合ハンドルが該メインシャフトを回転させる前に旋回することを可能にする、上記項目のいずれかに記載の外科手術ステープラー。
(項目8)
ヨークは、上記メインシャフト部材および上記関節接合リンケージに取り付けられる、上記項目のいずれかに記載の外科手術ステープラー。
【0007】
(摘要)
外科手術ステープラーが提供され、ハンドルアセンブリ、細長い本体、関節接合可能ツールアセンブリおよび関節接合機構を含む。関節接合機構は、関節接合リンケージに接続されたメインシャフト部材と、メインシャフト部材のシャフト部分を受け取るための開口部を有する保持器と、カムロッキング表面およびロッキングタブを有するカムロックと、ロッキングタブを受け取るためのくぼみを規定するロッキングカバーと、カムロックのカムロッキング表面を係合するように構成されているカム表面を有する関節接合ハンドルとを有する。
【0008】
ロッキング関節接合機構の実施形態が本明細書において図面を参照して開示される。
【図面の簡単な説明】
【0009】
【図1】図1は、本開示の実施形態に従うロッキング関節接合機構を含む外科手術ステープラーの透視図である。
【図2】図2は、図1の部分2の拡大透視図である。
【図3】図3は、図1のロッキング関節接合機構の分解組み立て透視図である。
【図4】図4は、図1のロッキング関節接合機構の断面側面図である。
【図5】図5は、図1のロッキング関節接合機構のメインシャフトの透視図である。
【図6】図6は、図1のロッキング関節接合機構のカムロックの透視図である。
【図7】図7は、図1のロッキング関節接合機構のロッキングカバーの遠位表面の透視図である。
【図8】図8は、図1のロッキング関節接合機構の関節接合レバーの遠位表面の透視図である。
【図9】図9は、図4の線9−9に沿って取られた図1のロッキング関節接合機構の断面上面図である。
【図10】図10は、図4の線10−10に沿って取られた図1のロッキング関節接合機構の底面図である。
【図11】図11は、図1のロッキング関節接合機構から分離された図7のロッキングカバーの透視図である。
【図12】図12は、図1のロッキング関節接合機構から分離された図8の関節接合レバーの透視図である。
【図13】図13は、図4の線13−13に沿って取られた図1のロッキング関節接合機構の断面端面図である。
【図14】図14は、図4の線14−14に沿って取られた図1のロッキング関節接合機構の断面端面図である。
【図15】図15は、図14の線15−15に沿って取られた図1のロッキング関節接合機構の断面上面図である。
【図16】図16は、関節接合レバーが第二の位置にある、図9の断面上面図である。
【図17】図17は、関節接合レバーが第二の位置にある、図13の断面端面図である。
【図18】図18は、関節接合レバーが第二の位置にある、図14の断面端面図である。
【図19】図19は、関節接合レバーが第三の位置にある、図9および図16の断面上面図である。
【図20】図20は、関節接合レバーが第三の位置にある、図1のロッキング関節接合機構の底面図である。
【図21】図21は、関節接合機構がロッキングされた位置にある、図15の断面上面図である。
【図22】図22は、図21の線22−22に沿って取られた図1の関節接合レバーの断面側面図である。
【発明を実施するための形態】
【0010】
(詳細な説明)
本開示のロッキング関節接合機構の実施形態がここで図面を参照して詳細に説明される。類似の数字は、複数の図の各々において、同一または対応する要素を指す。当分野において共通であるが、用語「近位」は、ユーザーまたはオペレーター(すなわち、外科医または内科医)により近い一部または構成要素を指し、用語「遠位」は、ユーザーからより遠い一部または構成要素を指す。本開示の関節接合機構は、外科手術ステープリングデバイスに関するものとして説明されるが、本開示の関節接合機構は、他の外科手術デバイスを用いた使用に対して改変され得る。
【0011】
図1〜22は、本開示に従うロッキング関節接合機構の実施形態を例示し、全体がロッキング関節接合機構100として示される。図1において示され、下で述べられるように、ロッキング関節接合機構100は、外科手術ステープラー10に組み込まれる。外科手術ステープラー10は、ハンドルアセンブリ20と、ハンドルアセンブリ20から延びる細長い本体30と、細長い本体30の遠位端部上に搭載されたツールアセンブリ40とを含む。外科手術ステープラー10の構造および機能は、本明細書においてロッキング関節接合機構100を完全に開示するために必要な程度に説明されるに過ぎない。外科手術ステープラー10に類似した外科手術ステープラーの構造および機能のより詳細な説明は、Millimanらへの共有に係る米国特許第5,865,361号を参照されたい。その内容は、本明細書において参照することによって全体が援用される。
【0012】
ここで、図1〜3を参照すると、関節接合機構100は、上部および下部ハウジングまたはノブ半分部104、106を有する関節接合ハウジング102を含む。上部および下部ハウジング半分部104、106は、ハンドルアセンブリ20の遠位端部および細長い本体30の近位端部の周りに受け取られるように構成されている。関節接合ハウジング102は、細長い本体30が長手方向軸「x」(図1)の周りを回転することを容易にするように構成されている。上部および下部ハウジング半分部104、106の各々は、ふしを有する近位端部104a、106aを含む。ふしを有する近位端部104a、106aは、ユーザーによって動作可能に係合されるように構成されている。上部ハウジング半分部104は、上部ハウジング半分部104を通り延びる開口部105(図3)を規定する。上部ハウジング半分部104は、開口部105を放射状に外側方向に延びる複数のスロット107をさらに規定する。示されるように、上部ハウジング半分部104は、4つのスロット107を含むが、上部ハウジング半分部104は、4つより多いまたは少ないスロット107を規定し得る。
【0013】
ここで、図3および図4を参照すると、関節接合機構100は、メインシャフト部材110、保持器120、カムロック130、ロッキングカバー140、関節接合レバー150およびチャネルヨーク160をさらに含む。上で述べたように、用語「近位」は、ユーザーまたはオペレーターにより近い部分または構成要素を指す。ユーザーは、図3および図4において示されるように、関節接合機構100の関節接合レバー150を係合するので、ロッキング関節接合機構100の近位端部にある関節接合レバー150へ参照がなされ、チャネルヨーク160は、ロッキング関節接合機構100の近位端部に設けられる。
【0014】
図3、図4および図5をさらに参照して、メインシャフト部材110は、土台部分112と、土台部分112から延びるシャフト部分114とを含む。土台部分112は、上部ハウジング半分部104の開口部105内に回転可能に受け取られるように構成されている。土台部分112は、放射状に外側方向に延びるスロット113aを含む(スロット113a)。センサーキャップ(たる形状の部分)は、軸方向にストロークを打ち、メインシャフトの放射状部分におけるスロットを係合し、係合解除する突出形体を含む。スロット113aの目的は、下で述べられる。土台部分112は、カム部材をさらに含む。より具体的には、開口部113bがカム部材を通して形成され、近位方向に延びるカムピン165(図3)の165aの一部を係合するように構成されている(下でさらに詳細に述べられる)。メインシャフト部材110のシャフト部分114は、長手方向に延びる一対のノッチ115a、115bを含む。ノッチ115a、115bは、対向した実質的にU形状のくぼみを形成する。くぼみは、シャフト部分114の長さを延びる。くぼみ115a、115bは、同じU形状プロファイルを有して示されるが、代わりの形状のプロファイルを含み得るか、および/またはプロファイルは、形状が異なり得る。シャフト部分114は、シャフト部分114の近位端部114aを放射状に通り延びる開口部117をさらに含む。下でさらに詳細に述べられるように、開口部117は、ピン155(図3)を受け取るように構成されており、関節接合ハンドルまたはレバー150をメインシャフト110に固定する。
【0015】
引き続き図3および図4を参照すると、保持器120は、実質的に平面なディスク122を形成する。ディスク122は、複数の放射状に外側方向に延びるタブ124を含む。示されるように、ディスク122は、上部ハウジング半分部104における開口部105の周りに形成されたスロット107に数および配置が対応する4つのタブ124を含む。タブ124の数および間隔は、上部ハウジング半分部104において形成されたスロット107の数および配置に応じて変わり得る。ディスク122は、スロット107より少ないタブ124を含み得ることが予期される。保持器120は、ディスク122の中央を通り延びる開口部123をさらに含む。開口部123は、メインシャフト部材110のシャフト部分114を受け取るサイズとされる。
【0016】
ここで、図3、図4および図6を参照すると、カムロック130は、実質的に環状な本体132およびフランジ部分134を含む。環状な本体132は、環状な本体132を通り延びる長手方向の穴133を規定する。穴133は、メインシャフト部材110のシャフト部分114を受け取るように構成されている。環状な本体132は、一対の隆起部132a、132bを含む。隆起部132a、132bは、穴133の長さを延びる。隆起部132a、132bは、メインシャフト110のシャフト部分114上に形成されたノッチ115a、115bに対応する。カム部材136は、カムロック130のフランジ部分134上に形成される。カム部材136は、環状な本体132から放射状に一定の距離を置かれ、フランジ部分134から近位方向に延びる。カム部材は、カムロッキング表面136a、136bを含む。ロッキングタブ138は、カム部材136から放射状に外側方向に延びる。ロッキングタブ138は、丸みのある近位表面138aを含む。フランジ部分134は、くぼみ137(図4)をフランジ部分134の遠位表面において規定する。くぼみ137は、付勢部材135の近位端部135aを受け取るように構成されている。下でさらに詳細に述べられるように、付勢部材135は、保持器120とカムロック130との間のメインシャフト110のシャフト部分114の周りに受け取られるように構成されている。示されるように、付勢部材135は、ウェーブスプリングを含むが、付勢部材135は、カムロック130を保持器120から離すように選択的に付勢する能力を有する任意の装置を含み得る。ウェーブスプリングは、ロープロファイルを含み、それによって、付勢部材135を受け取るスペースであり、カムロック130と保持器120との間に要求されるスペースを最小化する。
【0017】
ここで、図3、図4および図7を参照すると、ロッキングカバー140は、近位表面142aおよび遠位表面142b(図7)を有する実質的に環状な部材142を規定する。近位表面142aは、関節接合ハンドルまたはレバー150を係合および安定するように構成されている。示されるように、近位表面142aは傾いているが、他の構成が関節接合レバー150を安定させるために採用され得る。複数のフランジ144は、ロッキングカバー140を関節接合ハウジング102の上部ハウジング半分部104に固定するために、環状な部材142から放射状に外側方向に延びる。超音波溶接、もどり止め、バヨネットロック、接着剤などのような、カバーを取り付ける他の方法が用いられ得る。示されるように、ロッキングカバー140は、環状な部材142の周りに均等に一定の距離を置かれた4つのフランジ144を含む。ロッキングカバー140は、4つより多いまたは少ないフランジ144を含み得、フランジ144は、環状な部材142の周りに均等に一定の距離を置かれる場合か、または置かれない場合がある。示されるように、各フランジ144は、アパーチャ144aを規定する。アパーチャ144aは、スクリューまたは他のファスナー留めデバイスを受け取るように構成されている。あるいは、フランジ144は、ロッキングタブを含み得るか、または、そうでない場合、フランジ144は、関節接合ハウジング102の上部ハウジング半分部104をしっかりと係合するように構成され得る。
【0018】
特に図7を参照すると、環状な部材142は、環状な部材142を通り延びる長手方向の穴141と、長手方向の穴141から放射状に一定の距離を置かれた半円形のカットアウト143とを規定する。下でより詳細に述べられるように、カットアウト143は、カムロック130のカム部材136をスライドして受け取るように構成されている。環状な部材142の遠位表面142bは、複数のくぼみ145aを含む。複数のくぼみ145aは、半円形のカットアウト143の第一および第二の端部に沿って半円形のカットアウト143から放射状に外側方向に延びる。中央くぼみ145bは、半円形のカットアウト143の中間点に形成される。くぼみ145aおよび145bの各々は、カムロック130のロッキングタブ138を受け取るように構成されている。下でより詳細に述べられるように、中央くぼみ145bは、ロッキングタブ138が中央くぼみ145bにおいて受け取られたとき、ツールアセンブリ40が非関節接合位置にある位置に対応する。くぼみ145bは、一対のディバイダー147によって規定され、ディバイダー147は、面取りされた表面147aを有する。くぼみ145aは、ディバイダー146によって規定され、ディバイダー146は、面取りされた表面146aを有する。ディバイダー146は、類似した間隔のくぼみ145aを提供する、示された類似するサイズであり得る。このようにして、ツールアセンブリ40は、均等に増加して関節接合され得る。あるいは、ディバイダー146は、異なるサイズであり得、それによって、結果として、ツールアセンブリ40の不均一な増加関節接合となる。下でさらに詳細に論じられるように、ディバイダー146、147の面取りされた表面146a、147bは、それぞれ、カムロック130のロッキングタブ138をくぼみ145a、145bのうちの1つ内に方向付けるように規定されている。
【0019】
さらに図7を参照すると、半円形の拡張部148が環状な部材142から遠位方向に延びる。拡張部148の第一および第二の端部148a、148bは、関節接合機構100の過度な回転を妨げるためにカムロック130と相互接触するように構成されている。複数のフット149は、環状な部材142の遠位表面142bから遠位方向に延びる。フット149は、上部ハウジング半分部104(図3)における開口部105の周りに形成されたスロット107に、数および場所が対応する。フット149は、上部ハウジング半分部104のスロット107内に受け取られるように構成されており、保持器120のタブ124を係合するように構成されている。
【0020】
ここで、図3、図4、図8および図9を参照すると、関節接合ハンドルまたはレバー150は、円形土台152および細長い係合部分154を含む。関節接合レバー150は、くぼみ151を規定する。くぼみ151は、メインシャフト110のシャフト部分114の近位端部114aを受け取るように構成されており、カムロック130の環状な本体132の周りに受け取られるように構成されている。関節接合レバー150は、くぼみ151内から遠位方向に延びるカム部材156をさらに含む。カム部材156は、カム表面156a、156bを含む。下でさらに詳細に述べられるように、カム表面156a、156bは、カムロック130のカム部材136上に形成されたカムロック表面136a、136bを係合するように構成されている。特に図9を参照すると、関節接合レバー150は、一対の水平方向のカットアウト157、159をさらに規定する。カットアウト157、159は、細長い係合部分154を通り、くぼみ151から放射状に外側方向に延びる。カットアウト157、159は、メインシャフト110のシャフト部分114の近位端部114a上に形成された開口部117と一列に並ぶために位置決めされる。下でさらに詳細に述べられるように、カットアウト157、159は、関節接合レバー150がロッキングピン155と係合する前に、メインシャフト110に対して関節接合レバー150の部分的な回転を可能にするように構成されている。
【0021】
ここで、図3および図4を参照すると、チャネルヨーク160は、水平方向の部分162および垂直方向の部分164を有する実質的にL形状のブラケットである。フランジ166は、垂直方向の部材164から延びている。フランジ166は、関節接合リンケージ(示されていない)を係合するように構成されている。関節接合リンケージは、上で述べられたように、動作可能にツールアセンブリ40に接続される。水平方向の部材162は、スロット163を規定する。スロット163は、カムピン165の、遠位方向に延びる部分165bを受け取るように構成されている。
【0022】
関節接合機構は、外科手術ステープラーのような外科手術器具上に含まれるように構成され得る。関節接合機構は、外科手術ステープラーのセンサー機構と相互接触し得る。外科手術ステープラーは、ステープラーの細長いシャフトを通り延びる構造を含む。管状部材を含み得る構造は、関節接合外科手術ステープリング装填ユニットが細長いシャフトに係合すると、近位方向に交換される。関節接合しない装填ユニットは、管状部材を交換されないように構成されている。センサーキャップは、管状部材の近位端部に配列され、管状部材と一緒に交換される。センサーキャップは、スロット113aにおいて受け取られる突出部を有することによって、センサーキャップが交換されない限り、および交換されるまで、メインシャフト110の動きを妨げる。このようにして、関節接合機構は、関節接合装填ユニットが外科手術ステープラーの細長いシャフトに係合されない限り、動かされ得ない。スロット113aは、装填ユニットが装填されない場合に関節接合機構をロッキングすることと、関節接合装填ユニットが装填された場合に関節接合機構をロック解除することと、非関節接合装填ユニットが装填された場合に関節接合機構をロッキングすることとのために使用される。Millimanらへの米国特許第5,865,361号は、関節接合装填ユニットに相互接触するセンサー機構のセンサー管を開示する。
【0023】
関節接合機構100のアセンブリが、ここで図3〜12を参照して説明される。まず、図1〜3を参照すると、上部および下部ハウジング半分部104、106を外科手術ステープラー10の細長い本体30に取り付ける前に、チャネルヨーク160がハンドルアセンブリ20内に位置決めされる。チャネルヨーク160は、チャネルヨーク160の垂直方向の部材164上に形成されたフランジ166が細長い本体30内から延びる関節接合リンク(示されていない)を係合するように位置決めされる。上で述べたように、関節接合リンクの長手方向の並進は、ツールアセンブリ40を関節接合させる。次いで、上部および下部ハウジング半分部104、106は、細長い本体30の近位端部およびハンドルアセンブリ20の近位端部の周りに一緒にフィットされる。上部および下部ハウジング半分部104、106は、スナップフィット接続、機械ファスナー、接合、接着剤または任意の他の適切な方法によって結合され得る。
【0024】
ここで、図3、図4および図10を参照すると、カムピン165が次にメインシャフト110の土台部分112に固定される。カムピン165の近位部分165aは、土台部分112における開口部113bを通して受け取られる。一実施形態において、カムピン165の近位部分165aが開口部113bを通して受け取られると、近位部分165aは、メインシャフト110の固定されたカムピン165に打ち込まれる。あるいは、機械ファスナーまたは他の適切な方法がカムピン165をメインシャフト110に固定するために用いられ得る。カムピン165が土台部分112の開口部112b内に固定されると、メインシャフト110は、カムピン165の遠位部分165bがチャネルヨーク160の水平方向の部材162において形成されたスロット163内に受け取られるように、上部ハウジング半分部104の開口部105内に位置決めされる。
【0025】
引き続き図3および図4を参照すると、次に、保持器120がメインシャフト110のシャフト部分114にわたり、その周りに配置され、保持器120のディスク122から放射状に外側方向に延びるタブ124が上部ハウジング半分部104の開口部105の周りに形成されたスロット107内に受け取られるように位置決めされる。次に、付勢部材135は、付勢部材135の遠位端部135bが保持器120のディスク122を係合するようにメインシャフト110のシャフト部分114の周りに受け取られる。次いで、カムロック130がシャフト部分114の周りに受け取られる。上で述べたように、カムロック130の環状な本体132は、一対の対向する隆起部132a、132bを含む。隆起部132a、132bは、長手方向の穴133の長さを延びる。隆起部132a、132bは、メインシャフト110のシャフト部分114において形成されたノッチ115a、115bに対応する。カムロック130の隆起部132a、132bをメインシャフト110のそれぞれのノッチ115a、115bと係合することは、カムロック130をメインシャフト110に適切に整列させることを確実にし、さらにカムロック130をメインシャフト110によって位置指示する。このようにして、メインシャフト110の回転は、カムロック130の回転に対応する原因となる。
【0026】
ここで、図3、図4および図11を参照すると、次いで、ロッキングカバー140は、カムロック130のカム部材136が半円形のカットアウト143を通して受け取られるようにメインシャフト110のシャフト部分114の周りにカムロック130の環状な本体132にわたり受け取られる。図11においてみられるように、まず、ロックカバー140をカムロック130に係合すると、付勢部材135は、カムロック130のロッキングタブ138がディバイダー147の間に形成されたくぼみ145b内に受け取られるように、カムロック130をロッキングカバー140の方へ付勢する。ロッキングカバー140は、上で述べられた上部ハウジング半分部104に固定される。
【0027】
図3、図4、図9および図12を参照すると、次に、関節接合レバー150は、関節接合レバー150の土台152上に形成されたカム部材156がカムロック130のカム部材136を係合し、シャフト114の近位端部114a上に形成された開口部117が関節接合レバー150の係合部分154において形成された水平方向のカットアウト157、159に一列に並ぶように、シャフト114の近位端部114a上に配置される。次いで、ロッキングピン155がメインシャフト110のシャフト部分114において形成された開口部117を通して挿入され、関節接合ハンドルまたはレバー150をメインシャフト110に固定する。図9においてみられるように、ロッキングピン155は、完全にメインシャフト110のシャフト部分114を通り、水平方向のカットアウト157、159の各々の中へ延びるように構成されている。ロッキングピン155は、開口部117内に摩擦ばめ、接着剤または他の適切な方法によって、固定され得る。
【0028】
ここで、関節接合機構100の使用が図を参照して説明される。まず、図1、図4、図9および図13〜15を参照すると、関節接合機構100が最初の位置において示される。関節接合機構100が最初の位置にある場合、外科手術ステープラー10の細長い本体30およびツールアセンブリ40は、関節接合していない構成または直線構成にある。特に図13を参照すると、最初の位置において、カムロック130のカム部材136上に形成されたカム表面136a、136bは、関節接合レバー150のカム部材156上に形成されたカム表面156a、156bと一列に並べられている。付勢部材135は、カムロック130のカム表面136a、136bを関節接合レバー150のカム表面156a、156bとの係合へ付勢する。この係合は、摩擦に頼らない絶対的ロックを提供する。ここで、特に図14および図15を参照すると、最初の位置において、カムロック130のフランジ134上に形成されたロッキングタブ138がロックカバー140のディバイダー147の間に形成されたくぼみ145b内に受け取られる。中央くぼみ145bを規定するディバイダー上の面取りされた表面146は、比較的大きな面取りであり、機構を非関節接合位置へ戻す。他のディバイダー上の比較的より小さい面取りは、関節接合機構を関節接合された位置にロッキングする。これらの面取りは、関節接合された位置の間を動くために要求されるトルクを最小化するように構成され得る。簡単に図9を参照すると、最初の位置において、ロッキングピン155が関節接合レバー150の係合部分154において形成された水平方向のカットアウト157、159内の中央にある。
【0029】
ここで、図16〜18を参照すると、使用中、関節接合レバー150は、第一の半時計方向に矢印「A」によって示されるように回転させられる。以下に述べることは、関節接合レバー150を第一の半時計方向に回転させることによってツールアセンブリ40の第一の方向における関節接合の原因となることを指すが、関節接合レバー150は、また、第二の時計方向に回転させられ得ることによって、ツールアセンブリ40を第二の方向において関節接合させる。図16においてみられるように、係合部分154において形成された水平方向のカットアウト157、159の構成は、関節接合レバー150がメインシャフト110のシャフト部分114に対して最初の位置(図9)から第二の位置(図16)へ、メインシャフト110を回転させずに、回転させられることを可能にする。図17を参照すると、関節接合レバー150の最初の位置から第二の位置への回転は、関節接合レバー150をカムロック130に対して回転させる。カムロック130に対する関節接合レバー150の回転は、ロッキング部材130のカム部材136に対する関節接合レバー150のカム部材156の動きの原因となる。図17においてみられるように、第一の方向への関節接合レバー150の回転は、カム部材156のカム表面156bをカム表面136bと係合させる。カム表面136bとのカム表面156bの係合は、カムロック130を矢印「B」によって示されるように、関節接合レバー150から遠位方向にさせる。カムロック130の動きは、結果として付勢部材135の圧縮となる。図18を参照すると、カムロック130の遠位の動きは、さらにロッキングカバー140のくぼみ145b内からロッキングタブ138を係合解除させる。
【0030】
ここで、図19〜22を参照すると、関節接合レバー150の係合部分154とのロッキングピン155の係合は、メインシャフト110を関節接合レバー150に位置指示し、それによって、結果として関節接合レバー150のさらなるいずれかの回転となり、メインシャフト110を回転させる。したがって、関節接合レバー150の、矢印「A」によって示されるように、第一の位置への引き続きの回転は、矢印「C」(図20)によって示されるように、同じ第一の方向へメインシャフト11をの回転させる。メインシャフト110の回転は、カム部材165を動かせ、この動きは、矢印「D」によって示されるように、チャネルヨーク160を長手方向に並進させる。上で述べたように、チャネルヨーク160は、関節接合リンケージ(示されていない)に動作可能に接続される。チャネルヨーク160の並進は、関節接合リンケージを並進させ、関節接合リンケージは、細長い本体30に対してツールアセンブリ40(図1)を関節接合させる。
【0031】
関節接合レバー150は、カムロック130のロッキングタブ138がカバーロック140の半円形の拡張部148の端部表面148b(図11)を係合するまで、第一の方向「A」に回転され得る。関節接合レバー150がツールアセンブリ40(図1)を所望の位置に関節接合するために十分回転させられると、関節接合レバー150およびメインシャフト110を回転させるために関節接合レバー150に印加された力が解除される。関節接合レバー150に印加された力が解除された場合、付勢部材135を圧縮する力も解除される。カムロック130に対する付勢部材135の付勢力は、カムロック130を矢印「E」(図22)によって示されるように、関節接合レバー150の方へ近位方向に推進させる。関節接合レバー150の方へのカムロック130の動きは、カム部材136、156のカム表面136a、156a、136b、156bが、それぞれ再係合するので、矢印「F」によって示されるように、関節接合レバー150を第二の方向に回転させる。関節接合レバー150に対するカムロック130の近位方向への動きは、さらに、カムロック130のロッキングタブ138をロックカバー140のくぼみ145aのうちの1つ内に受け取らせる。ロッキングタブ138の丸みのある表面138aおよびディバイダー146の面取りされた表面146aは、くぼみ145aのうちの1つ内でのロッキングタブ138の受け取りを容易にする。面取りされた表面146aは、また、「カチッ」という触覚のフィードバックを提供する。
【0032】
ロッキングタブ138がくぼみ145aのうちの1つ内に受け取られると、ツールアセンブリ40は、関節接合された位置においてロッキングされ、外科手術ステープラー10は、使用の準備ができる。外科手術ステープラー10の使用に続き、ロッキング関節接合機構100は、ツールアセンブリ40を上で述べた態様で別の関節接合された位置に関節接合するために用いられ得るか、またはロッキング関節接合機構100は、ツールアセンブリ40を非関節接合位置(図1)に戻すために用いられ得る。
【0033】
さまざまな改変が本明細書において開示された実施形態になされ得ることが理解される。例えば、上で注意したように、開示された関節接合ロッキング機構は、関節接合の増加した度合いを提供するために改変され得る。関節接合の度合いは、実行されている処置に応じて変わり得る。そのため、上の説明は、限定的として解釈されるべきでなく、特定の実施形態の例示としてのみ解釈されるべきである。当業者は、本明細書に添付の請求項の範囲および精神内の他の改変を予想する。
【符号の説明】
【0034】
10 外科手術ステープラー
20 ハンドルアセンブリ
30 細長い本体
40 ツールアセンブリ
100 ロッキング関節接合機構
【特許請求の範囲】
【請求項1】
外科手術ステープラーであって、
ハンドルアセンブリと、
該ハンドルアセンブリから延びる細長い本体と、
該細長い本体の遠位端部上に搭載される関節接合可能ツールアセンブリと、
関節接合機構であって、該関節接合機構は、該ハンドルアセンブリに動作可能に接続され、該ツールアセンブリを1つ以上の位置において、選択的に関節接合することと、しっかりとロッキングすることとを行うように構成されている、関節接合機構と
を備え、該関節接合機構は、
回転するように搭載され、関節接合リンケージに接続されている、メインシャフト部材と、
回転可能に固定された保持器であって、該保持器は、該メインシャフト部材のシャフト部分を受け取るための開口部を有する、保持器と、
該メインシャフト部材の該シャフト部分を受け取るように構成されている穴を有するカムロックであって、該カムロックは、カムロッキング表面とロッキングタブとを有する、カムロックと、
該保持器と該カムロックとの間に配置される付勢部材と、
該ロッキングタブを受け取るためのくぼみを規定するロッキングカバーであって、該くぼみは、非関節接合位置に対応するために位置決めされる中央くぼみを含む、ロッキングカバーと、
該カムロックの該カムロッキング表面を係合するように構成されたカム表面を有する関節接合ハンドルであって、該カムロッキング表面と該カム表面との係合が、該カムロックを該付勢部材の付勢に対抗するように移動させる、関節接合ハンドルと
を有する、外科手術ステープラー。
【請求項2】
前記くぼみは、面取りされた表面を有する複数のディバイダーによって規定される、請求項1に記載の外科手術ステープラー。
【請求項3】
前記複数のディバイダーは、サイズが異なる、請求項2に記載の外科手術ステープラー。
【請求項4】
前記複数のディバイダーは、中央ディバイダーを含み、該中央ディバイダーは、中央くぼみを規定し、他のディバイダーは、関節接合された位置のためのくぼみを規定する、請求項2に記載の外科手術ステープラー。
【請求項5】
前記中央ディバイダー上の面取り部は、比較的大きく、関節接合された位置のためのくぼみを規定する該ディバイダーの面取り部は、比較的小さい、請求項4に記載の外科手術ステープラー。
【請求項6】
前記ロッキングカバーは、半円形の拡張部を有し、該拡張部は、端部を有し、該端部は、前記カムロックと相互接触することと、過度な回転を妨げることとを行うように構成されている、請求項1に記載の外科手術ステープラー。
【請求項7】
前記関節接合ハンドルは、カットアウトを有し、該カットアウトは、前記シャフト部分上に形成された開口部と一列に並び、該カットアウトは、該関節接合ハンドルを前記メインシャフトに固定するロッキングピンをさらに含み、該カットアウトは、該関節接合ハンドルが該メインシャフトを回転させる前に旋回することを可能にする、請求項1に記載の外科手術ステープラー。
【請求項8】
ヨークは、前記メインシャフト部材および前記関節接合リンケージに取り付けられる、請求項1に記載の外科手術ステープラー。
【請求項1】
外科手術ステープラーであって、
ハンドルアセンブリと、
該ハンドルアセンブリから延びる細長い本体と、
該細長い本体の遠位端部上に搭載される関節接合可能ツールアセンブリと、
関節接合機構であって、該関節接合機構は、該ハンドルアセンブリに動作可能に接続され、該ツールアセンブリを1つ以上の位置において、選択的に関節接合することと、しっかりとロッキングすることとを行うように構成されている、関節接合機構と
を備え、該関節接合機構は、
回転するように搭載され、関節接合リンケージに接続されている、メインシャフト部材と、
回転可能に固定された保持器であって、該保持器は、該メインシャフト部材のシャフト部分を受け取るための開口部を有する、保持器と、
該メインシャフト部材の該シャフト部分を受け取るように構成されている穴を有するカムロックであって、該カムロックは、カムロッキング表面とロッキングタブとを有する、カムロックと、
該保持器と該カムロックとの間に配置される付勢部材と、
該ロッキングタブを受け取るためのくぼみを規定するロッキングカバーであって、該くぼみは、非関節接合位置に対応するために位置決めされる中央くぼみを含む、ロッキングカバーと、
該カムロックの該カムロッキング表面を係合するように構成されたカム表面を有する関節接合ハンドルであって、該カムロッキング表面と該カム表面との係合が、該カムロックを該付勢部材の付勢に対抗するように移動させる、関節接合ハンドルと
を有する、外科手術ステープラー。
【請求項2】
前記くぼみは、面取りされた表面を有する複数のディバイダーによって規定される、請求項1に記載の外科手術ステープラー。
【請求項3】
前記複数のディバイダーは、サイズが異なる、請求項2に記載の外科手術ステープラー。
【請求項4】
前記複数のディバイダーは、中央ディバイダーを含み、該中央ディバイダーは、中央くぼみを規定し、他のディバイダーは、関節接合された位置のためのくぼみを規定する、請求項2に記載の外科手術ステープラー。
【請求項5】
前記中央ディバイダー上の面取り部は、比較的大きく、関節接合された位置のためのくぼみを規定する該ディバイダーの面取り部は、比較的小さい、請求項4に記載の外科手術ステープラー。
【請求項6】
前記ロッキングカバーは、半円形の拡張部を有し、該拡張部は、端部を有し、該端部は、前記カムロックと相互接触することと、過度な回転を妨げることとを行うように構成されている、請求項1に記載の外科手術ステープラー。
【請求項7】
前記関節接合ハンドルは、カットアウトを有し、該カットアウトは、前記シャフト部分上に形成された開口部と一列に並び、該カットアウトは、該関節接合ハンドルを前記メインシャフトに固定するロッキングピンをさらに含み、該カットアウトは、該関節接合ハンドルが該メインシャフトを回転させる前に旋回することを可能にする、請求項1に記載の外科手術ステープラー。
【請求項8】
ヨークは、前記メインシャフト部材および前記関節接合リンケージに取り付けられる、請求項1に記載の外科手術ステープラー。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【公開番号】特開2012−161606(P2012−161606A)
【公開日】平成24年8月30日(2012.8.30)
【国際特許分類】
【出願番号】特願2012−19528(P2012−19528)
【出願日】平成24年2月1日(2012.2.1)
【出願人】(501289751)タイコ ヘルスケア グループ リミテッド パートナーシップ (320)
【Fターム(参考)】
【公開日】平成24年8月30日(2012.8.30)
【国際特許分類】
【出願日】平成24年2月1日(2012.2.1)
【出願人】(501289751)タイコ ヘルスケア グループ リミテッド パートナーシップ (320)
【Fターム(参考)】
[ Back to top ]