
ロックアセンブリを含む外科用器具
【課題】所定の位置にある直線状ステープラーのツールアセンブリを保持するためのロックアセンブリを含む外科用器具を提供する。
【解決手段】ハンドル部分、本体部分、関節ツールアセンブリ17およびロックアセンブリ700を含む外科用器具において、該本体部分は、ハンドル部分から遠位側に延び、第1の長手方向軸を定義し、該関節ツールアセンブリは第2の長手方向軸を定義し、第2の長手方向軸が第1の長手方向軸と実質的に一致する第1の位置から、第2の長手方向軸が第1の長手方向軸に対して所定の角度をなす少なくとも第2の位置まで移動可能である。該ロックアセンブリ700は、本体部分と機械的に協動するプッシャー704と、関節ツールアセンブリと機械的に協動するピボット706とを含む。該プッシャーは、ピボット嵌合面と嵌合するような寸法のプッシャー嵌合面を含む。
【解決手段】ハンドル部分、本体部分、関節ツールアセンブリ17およびロックアセンブリ700を含む外科用器具において、該本体部分は、ハンドル部分から遠位側に延び、第1の長手方向軸を定義し、該関節ツールアセンブリは第2の長手方向軸を定義し、第2の長手方向軸が第1の長手方向軸と実質的に一致する第1の位置から、第2の長手方向軸が第1の長手方向軸に対して所定の角度をなす少なくとも第2の位置まで移動可能である。該ロックアセンブリ700は、本体部分と機械的に協動するプッシャー704と、関節ツールアセンブリと機械的に協動するピボット706とを含む。該プッシャーは、ピボット嵌合面と嵌合するような寸法のプッシャー嵌合面を含む。
【発明の詳細な説明】
【技術分野】
【0001】
本開示は、ロックアセンブリを含む外科用器具および使い捨て可能な装填ユニットに関する。より詳細には、本開示は、関節外科用器具、例えば、所定の位置にある直線状ステープラーのツールアセンブリを保持するためのロックアセンブリを含む外科用器具に関する。
【背景技術】
【0002】
関節のために外科用器具の本体部分の遠位端上に取り付けられたツールアセンブリを含む外科用器具は周知である。代表的には、このような外科用器具は、操作者が外科用器具の本体部分に対して上記ツールアセンブリを遠隔的に関節運動させて、操作者が組織に、より容易に接近し、組織を手術し、そして/または組織を操作することを可能にする関節制御機構を含む。
【0003】
このような関節ツールアセンブリが、特に内視鏡外科的手順において所望されるようになった。内視鏡外科的手順では、外科用器具の遠位端は、手術部位に接近するために身体中の小切開を通じて挿入される。代表的には、適切なサイズ、例えば、5mm、10mmのカニューレが、この身体の切開を通じて挿入され、手術部位に接近するための案内チャネルを提供する。より少ない瘢痕、患者に対する低減された外傷、より早い治癒時間が存在するように小さな身体切開を提供することが所望されるので、外科用器具とカニューレの内径との間の許容誤差は小さい。
【0004】
内視鏡手順の間に関節ツールアセンブリを有する外科用器具が用いられるとき、この関節ツールアセンブリは、カニューレまたは小さな身体切開を通るツールアセンブリの挿入の間に、一般にその関節運動されない位置(すなわち、このツールアセンブリの長手方向軸が外科用器具の本体部分の長手方向軸と一致した位置)にある。このツールアセンブリの関節運動された位置への移動は、外科用器具の本体部分とわずかにずれているときでさえ、カニューレまたは小さな切開を通る外科用器具の遠位端の挿入を妨害、および/または防ぎ得る。
【0005】
関節ツールアセンブリを有する外科用器具の操作または取り扱いの間に、ツールアセンブリは、このツールアセンブリが、偶然に非関節運動位置から関節運動位置まで移動するように、震動させられるか、または動揺させられることは一般的ではない。上記で論議されたように、これは、特に、この外科用器具が内視鏡手順で用いられ得る場合に所望されない。さらに、ツールアセンブリがハンドル部分に対してその位置を保持する能力は、外科医がこのツールアセブリを用いて如何に良好に組織を操作し得るかに影響する。
【発明の概要】
【発明が解決しようとする課題】
【0006】
したがって、所定の位置にある直線状ステープラーのツールアセンブリを保持するためのロックアセンブリを含む外科用器具が必要とされる。
【課題を解決するための手段】
【0007】
本開示は、ハンドル部分、本体部分、関節ツールアセンブリおよびロックアセンブリを含む外科用器具に関する。この本体部分は、上記ハンドル部分から遠位側に延び、第1の長手-方向軸を定義する。上記関節ツールアセンブリは第2の長手方向軸を定義し、本体
部分の遠位端に配置され、この第2の長手-方向軸が上記第1の長手方向軸と実質的に一
致する第1の位置から、少なくとも上記第2の長手方向軸が上記第1の長手方向軸に対して所定の角度をなす第2の位置まで移動可能である。上記ロックアセンブリは、上記本体部分と機械的に協動するプッシャーと、上記関節ツールアセンブリと機械的に協動するピボットとを含む。上記プッシャーは、上記ピボット上のピボット嵌合面と嵌合するような寸法の嵌合面を含む。このプッシャーは、上記ピボットに向かって(例えば、上記本体部分と機械的に協動するスプリングを経由して)遠位側に付勢され、上記関節ツールアセンブリが上記第2の位置に移動されるとき近位側に押される。
【0008】
本開示の実施形態では、上記プッシャーの嵌合面および/またはピボットの嵌合面は、その長さの大部分に沿って実質的に平坦である。上記ロックアセンブリが上記ピボットおよびプッシャーと機械的に係合するリンクを含むこともまた開示される。1つの実施形態では、このリンクは、上記ピボットと旋回可能に係合している。本開示の別の実施形態では、このピボットは、上記プッシャー嵌合面が上記ピボット嵌合面と接触するとき、プッシャーの少なくとも一部分と重複するシェルフを含む。
【0009】
開示される実施形態では、上記関節アセンブリは、使い捨て装填ユニットの一部分である。本開示は、上記に記載のような関節ツールアセンブリおよびロックアセンブリを含む使い捨て可能な装填ユニットにも関する。
【0010】
本発明は、さらに、以下の手段を提供する。
【0011】
(項目1)
外科用器具であって、
ハンドル部分と、
該ハンドル部分から遠位側に延び、第1の長手-方向軸を定義する本体部分と、
第2の長手方向軸を定義する関節ツールアセンブリであって、該本体部分の遠位端に配置され、該第2の長手-方向軸が該第1の長手方向軸と実質的に一致する第1の位置から
、少なくとも該第2の長手方向軸が該第1の長手方向軸に対して所定の角度で配置される第2の位置まで移動可能である関節ツールアセンブリと、
該本体部分と機械的に協動するプッシャーと、該関節ツールアセンブリと機械的に協動するピボットとを含むロックアセンブリであって、該プッシャーが該ピボットのピボット嵌合面と嵌合するような寸法のプッシャー嵌合面を有し、該プッシャーは、該ピボットに向かって遠位側に付勢され、該関節ツールアセンブリが該第2の位置に移動されるとき近位側に押される、ロックアセンブリと
を備えた、外科用器具。
【0012】
(項目2)
前記プッシャー嵌合面が、その長さの大部分に沿って実質的に平坦である、項目1に記載の外科用器具。
【0013】
(項目3)
前記ピボット嵌合面が、その長さの大部分に沿って実質的に平坦である、項目1に記載の外科用器具。
【0014】
(項目4)
前記プッシャー嵌合面が、その長さの大部分に沿って実質的に平坦であり、かつ前記ピボット嵌合面が、その長さの大部分に沿って実質的に平坦である、項目1に記載の外科用器具。
【0015】
(項目5)
少なくとも1つのスプリングが、前記本体部分と機械的に協動し、かつ前記プッシャーを遠位側に付勢する、項目1に記載の外科用器具。
【0016】
(項目6)
前記ロックアセンブリがリンクをさらに含み、該リンクがピボットプレートおよび前記プッシャーと機械的に係合する、項目1に記載の外科用器具。
【0017】
(項目7)
前記リンクが、前記ピボットと旋回可能に係合する、項目6に記載の外科用器具。
【0018】
(項目8)
前記ピボットがシェルフを含み、前記プッシャー嵌合面が前記ピボット嵌合面と接触するとき、該シェルフが該プッシャーの少なくとも一部分と重複する、項目1に記載の外科用器具。
【0019】
(項目9)
前記関節ツールアセンブリが、使い捨て可能な装填ユニットの一部分である、項目1に記載の外科用器具。
【0020】
(項目10)
外科用器具と離脱可能に係合するように構成された使い捨て可能な装填ユニットであって、
第1の長手-方向軸を定義する本体部分と、
該本体部分の遠位端に固定可能であり、第2の長手方向軸を定義する該本体部分の遠位側に配置される関節ツールアセンブリであって、該関節ツールアセンブリは、該第2の長手方向軸が該第1の長手方向軸と実質的に一致する第1の位置から、該第2の長手方向軸が該第1の長手方向軸に対して所定の角度で配置される第2の位置まで移動可能である、関節ツールアセンブリと、
該本体部分と機械的に協動するプッシャーと、該関節ツールアセンブリと機械的に協動するピボットとを含むロックアセンブリであって、該プッシャーが、該ピボットのピボット嵌合面と嵌合するような寸法のプッシャー嵌合面を有し、該プッシャーが該ピボットに向かって遠位側に付勢され、該関節ツールアセンブリが該第2の位置に移動されるとき近位側に押される、使い捨て可能な装填ユニット。
【0021】
(項目11)
前記プッシャー嵌合面が、その長さの大部分に沿って実質的に平坦である、項目10に記載の使い捨て可能な装填ユニット。
【0022】
(項目12)
前記ピボット嵌合面が、その長さの大部分に沿って実質的に平坦である、項目10に記載の使い捨て可能な装填ユニット。
【0023】
(項目13)
前記プッシャー嵌合面が、その長さの大部分に沿って実質的に平坦であり、かつ前記ピボット嵌合面が、その長さの大部分に沿って実質的に平坦である、項目10に記載の使い捨て可能な装填ユニット。
【0024】
(項目14)
前記プッシャーが、少なくとも1つのスプリングによって前記ピボットに向かって遠位側に付勢される、項目10に記載の使い捨て可能な装填ユニット。
【0025】
(項目15)
前記ロックアセンブリがリンクをさらに含み、該リンクがピボットプレートおよび前記プッシャーと機械的に係合する、項目10に記載の使い捨て可能な装填ユニット。
【0026】
(項目16)
前記リンクが、前記ピボットと旋回可能に係合する、項目15に記載の使い捨て可能な装填ユニット。
【0027】
(項目17)
前記ピボットがシェルフを含み、前記プッシャー嵌合面が前記ピボット嵌合面と接触するとき、該シェルフが該プッシャーの少なくとも一部分と重複する、項目10に記載の使い捨て可能な装填ユニット。
【0028】
(摘要)
ハンドル部分、本体部分、関節ツールアセンブリおよびロックアセンブリを含む外科用器具が開示される。この本体部分は、上記ハンドル部分から遠位側に延び、そして第1の長軸-方向軸を定義する。上記関節ツールアセンブリは第2の長手方向軸を定義し、そし
てこの第2の長手-方向軸が上記第1の長手方向軸と実質的に一致する第1の位置から、
上記第2の長手方向軸が上記第1の長手方向軸に対して所定の角度をなす少なくとも第2の位置まで移動可能である。上記ロックアセンブリは、上記本体部分と機械的に協動するプッシャーと、上記関節ツールアセンブリと機械的に協動するピボットとを含む。上記プッシャーは、ピボット嵌合面と嵌合するような寸法のプッシャー嵌合面を含む。このプッシャーは、上記ピボットに向かって遠位側に付勢され、そして上記関節ツールアセンブリが上記第2の位置に移動されるとき近位側に押される。
【図面の簡単な説明】
【0029】
本明細書に開示される外科用器具の種々の実施形態は、本明細書において図面を参照して説明される。
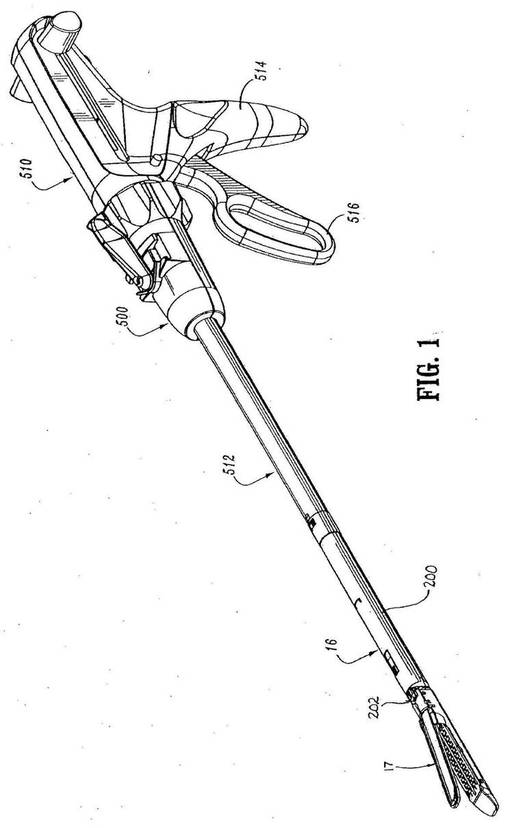
【図1】図1は、関節ツールアセンブリを備えた本明細書に開示される外科用器具の1つの実施形態の遠位端からの側方斜視図である。
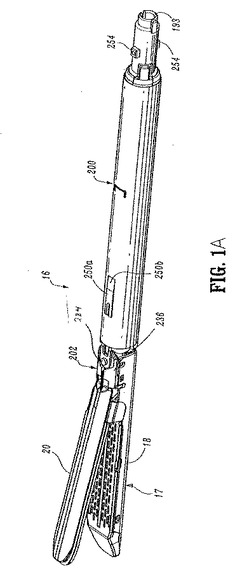
【図1A】図1Aは、ツールアセンブリを含む図1に示される外科用器具の使い捨て可能な装填ユニット(DLU)の近位端からの側方斜視図である。
【図2】図2は、図1に示される外科用器具のDLUの、パーツが分離された、取り付けアセンブリとツールアセンブリの遠位端の側方斜視図である。
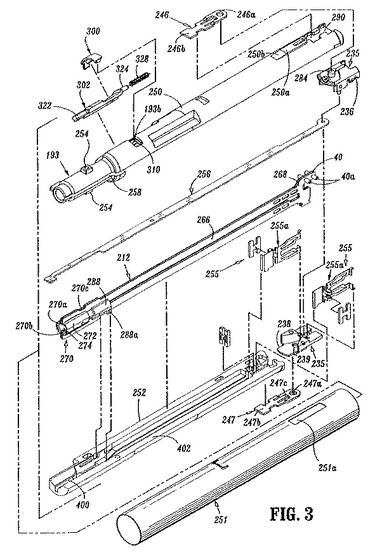
【図3】図3は、パーツを分離して図1Aに示されるDLUの取り付けアセンブリと近位本体部分の側方斜視図である。
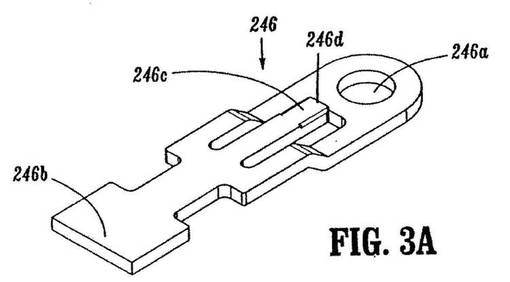
【図3A】図3Aは、図1に示される外科用器具のカップリング部材の側方斜視図である。
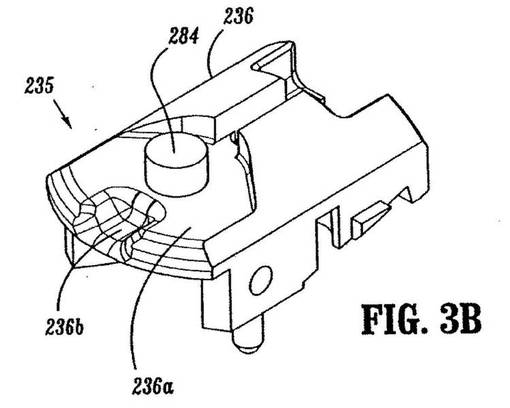
【図3B】図3Bは、図1に示される外科用器具のDLUの取り付けアセンブリの上部取り付け部分の側方斜視図である。
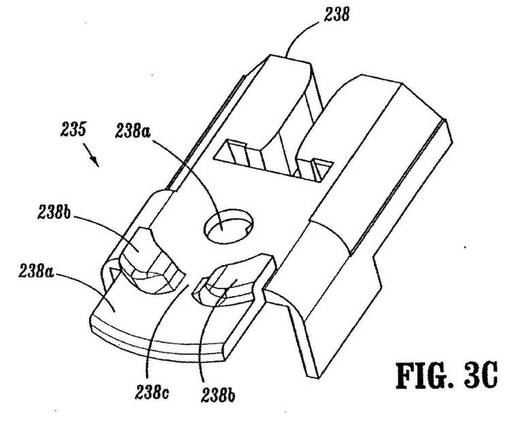
【図3C】図3Cは、図1に示される外科用器具のDLUの取り付けアセンブリの下部取り付け部分の側方斜視図である。
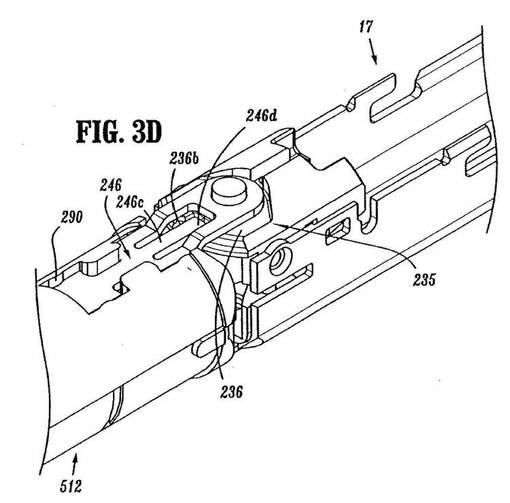
【図3D】図3Dは、ツールアセンブリを非関節運動位置にした外科用器具のDLUの取り付けアセンブリおよびツールアセンブリの、近位本体部分の上からの側方斜視図である。
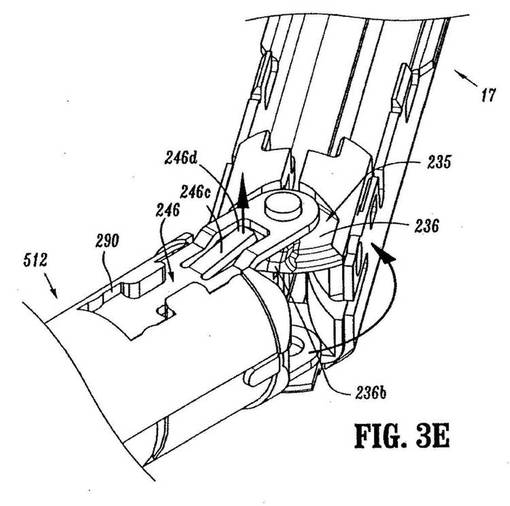
【図3E】図3Eは、ツールアセンブリを関節運動位置にした、図3Dに示される取り付けアセンブリおよびツールアセンブリの、近位本体部分の上からの側方斜視図である。
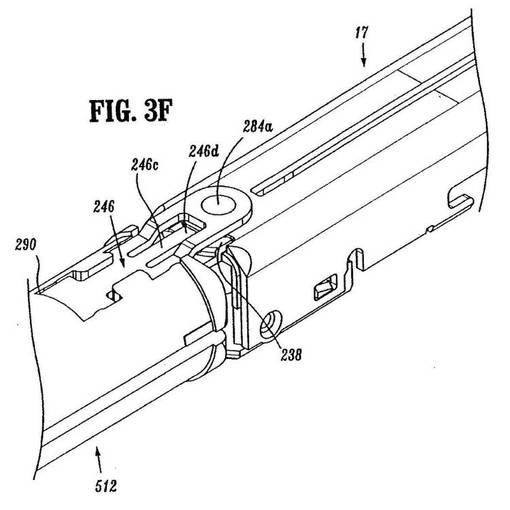
【図3F】図3Fは、ツールアセンブリを非関節運動位置にした外科用器具のDLUの取り付けアセンブリおよびツールアセンブリの、近位本体部分の下からの側方斜視図である。
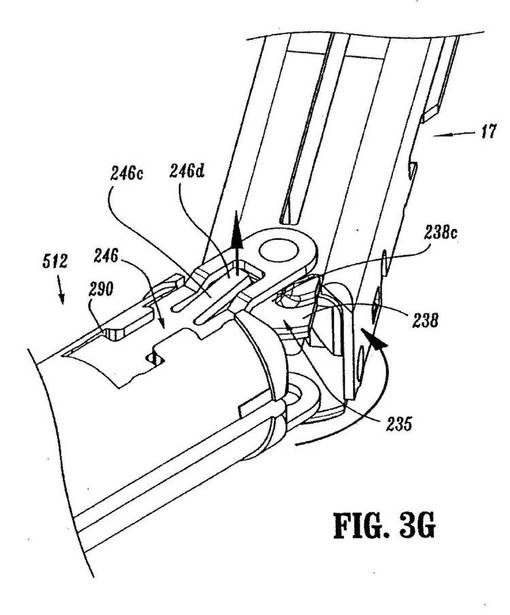
【図3G】図3Gは、ツールアセンブリを関節運動位置にした図3Fに示される取り付けアセンブリおよびツールアセンブリの、近位本体部分の下からの側方斜視図である。
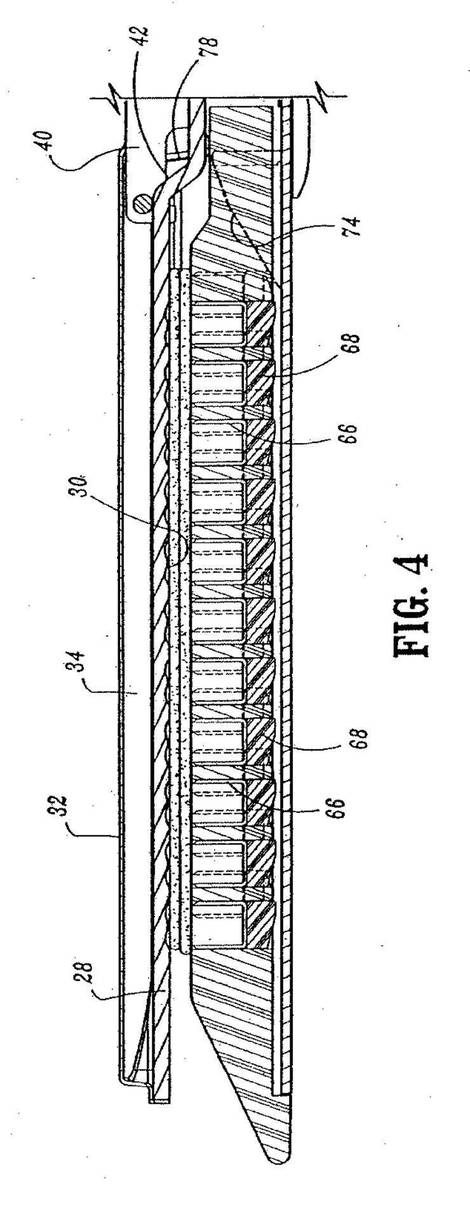
【図4】図4は、図1Aに示されるDLUのツールアセンブリの側方断面図である。
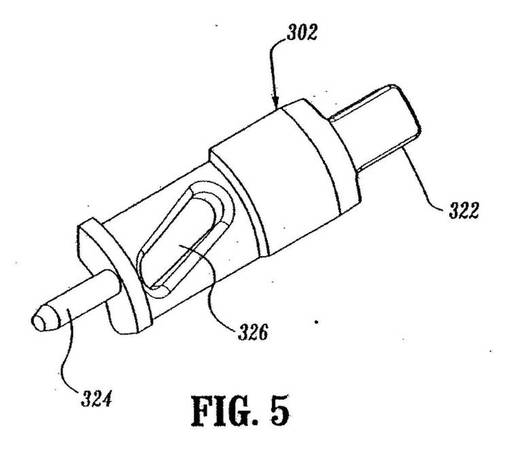
【図5】図5は、図3に示される近位本体部分ロック機構のロック部材アクチュエーターの上からの斜視図である。
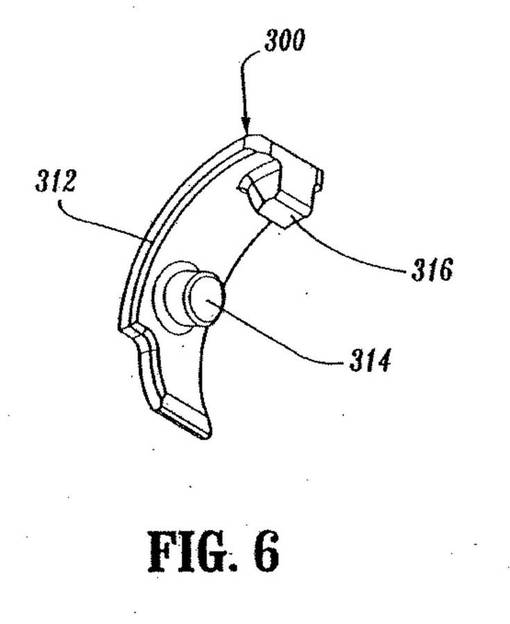
【図6】図6は、図3に示されるロック機構のロック部材の底からの斜視図である。
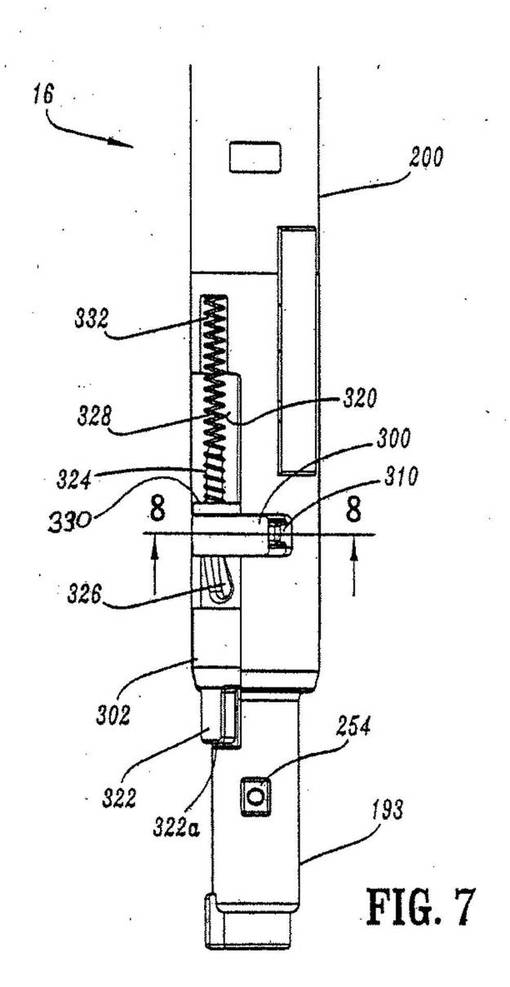
【図7】図7は、ロック機構をロック位置にした図1Aに示されるDLU近位本体部分の近位端の平面図である。
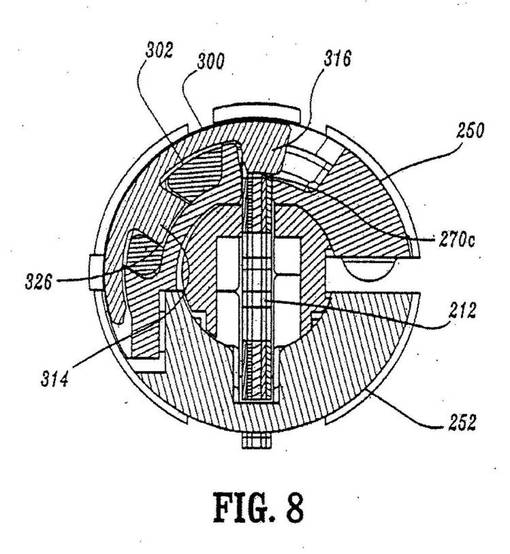
【図8】図8は、図7の断面線8−8に沿ってとった断面図である。
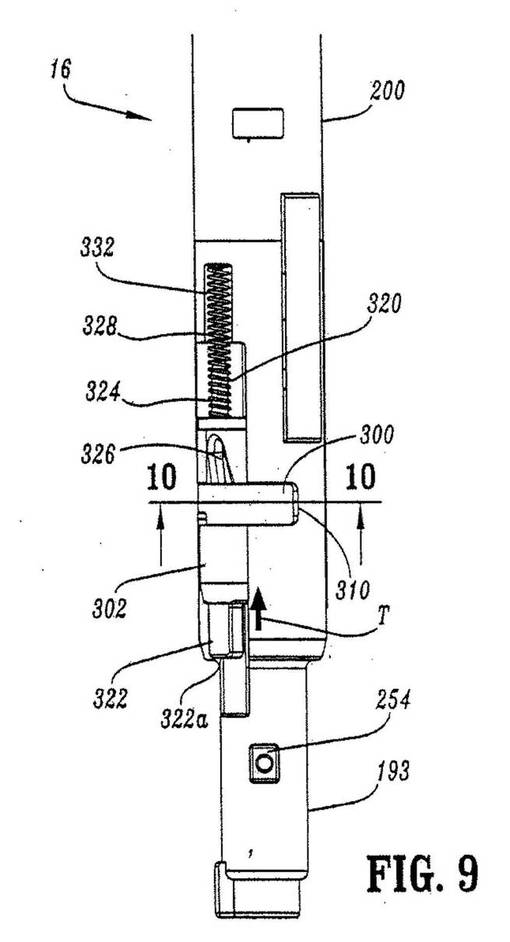
【図9】図9は、ロック機構を非ロック位置にした図1Aに示されるDLU近位本体部分の近位端の平面図である。
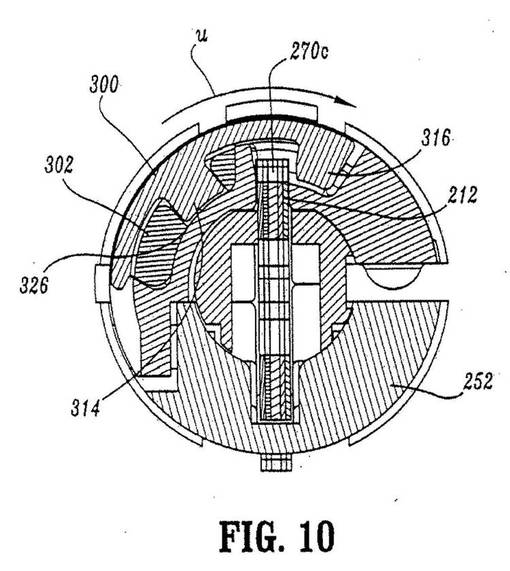
【図10】図10は、図9の断面線10−10に沿ってとった断面図である。
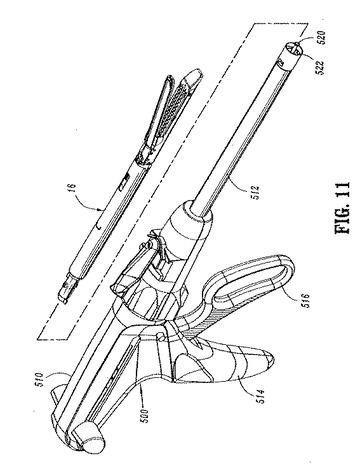
【図11】図11は、外科用器具へのDLUの取り付けの前の図1に示されるDLUおよび外科用器具の側方斜視図である。
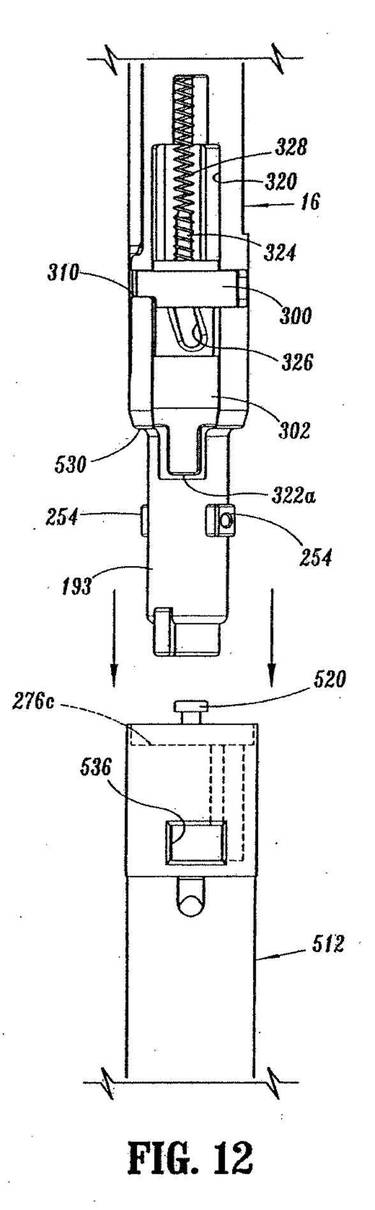
【図12】図12は、外科用器具の遠位端への取り付けの前の図11に示されるDLUの近位端および外科用器具の遠位端の平面図である。
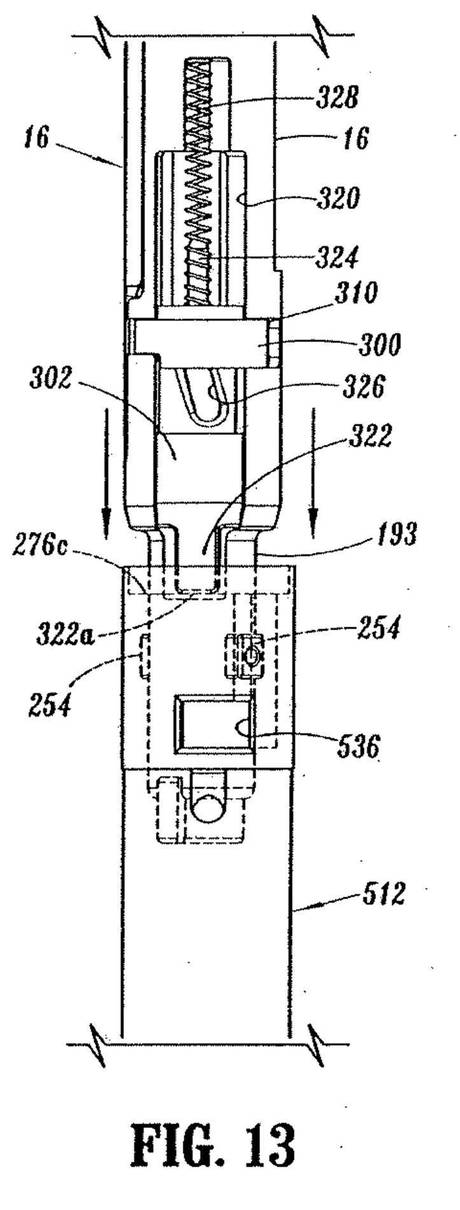
【図13】図13は、DLUが外科用器具の遠位端の中へに直線状に進行させられるときの、図11に示されるDLUの近位端の平面図である。
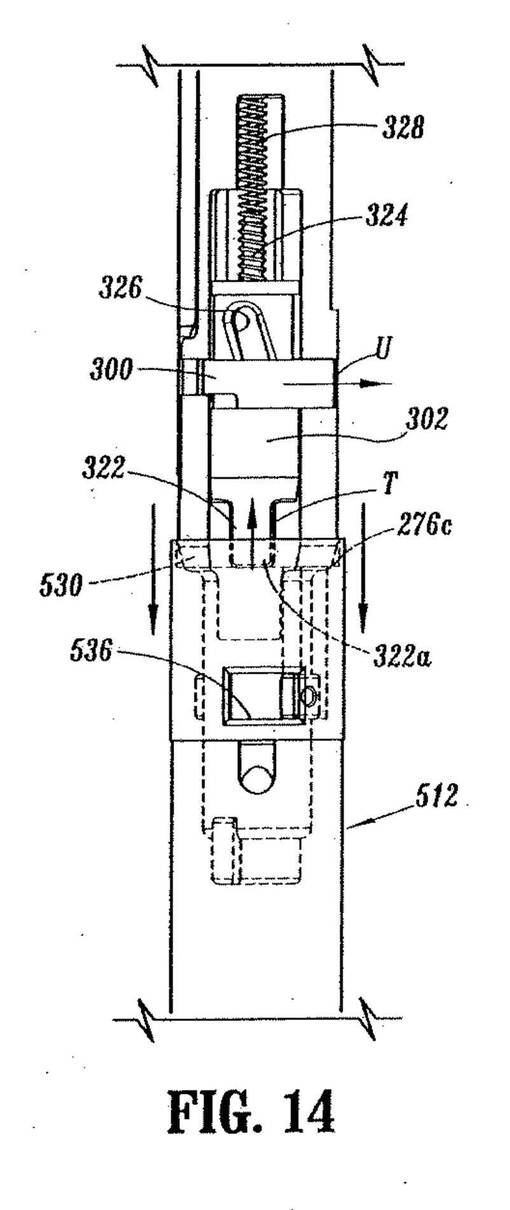
【図14】図14は、DLUが直線状に進行された後ではあるが、DLUを外科用器具にロックする前の、図12に示されるDLUの近位端および外科用器具の遠位端の平面図である。
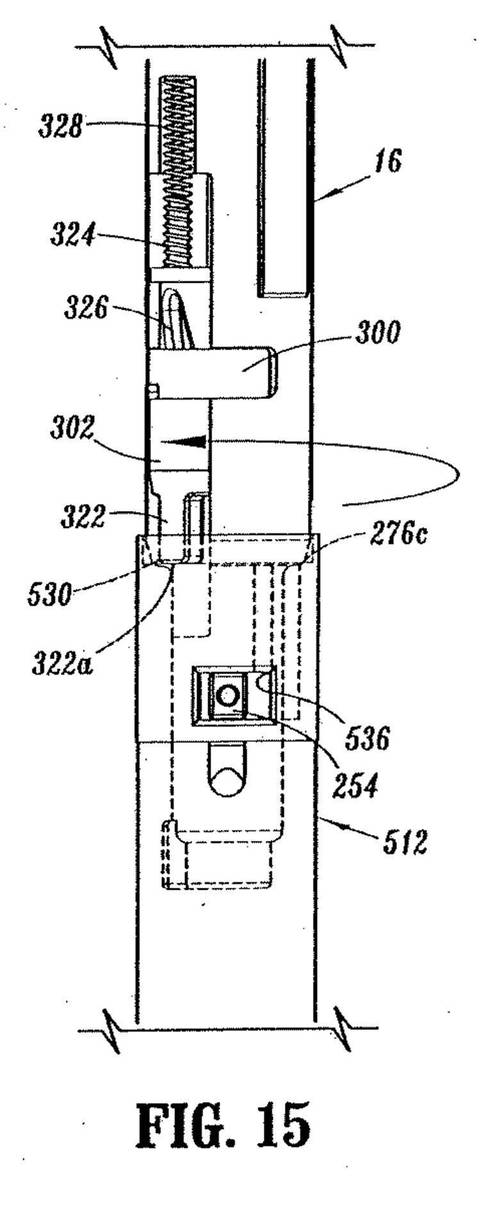
【図15】図15は、DLUが直線状に進行させられ、外科用器具上に回転可能にロックされた後の、図13に示されるDLUの近位端および外科用器具の遠位端の平面図である。
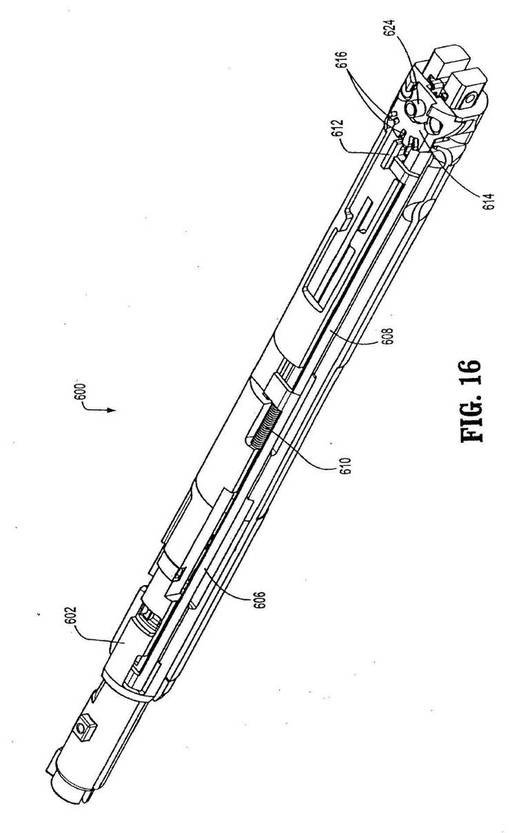
【図16】図16は、本開示の実施形態による外科用器具とともに使用するためのロックアセンブリの斜視図である。
【図17】図17は、図16のロックアセンブリの種々の構成要素の斜視図である。
【図18】図18は、関節ツールアセンブリを非関節運動位置にして示される、図16および17のロックアセンブリの一部分の拡大斜視図である。
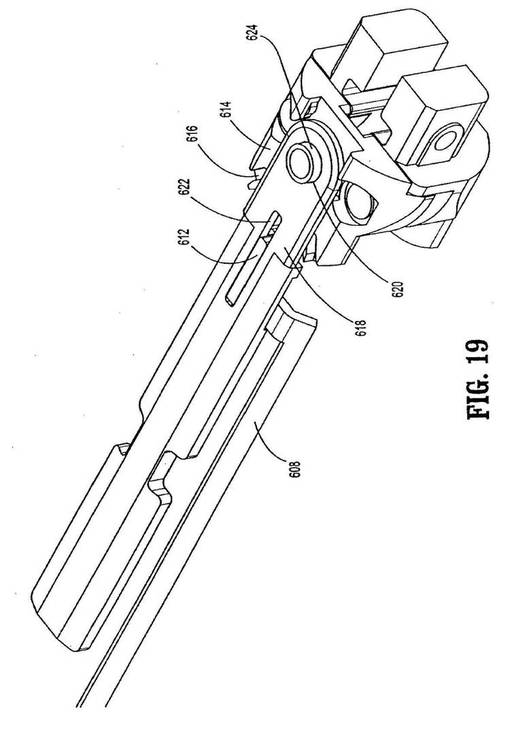
【図19】図19は、図16〜18の、リンクを含むロックアセンブリの一部分の拡大斜視図である。
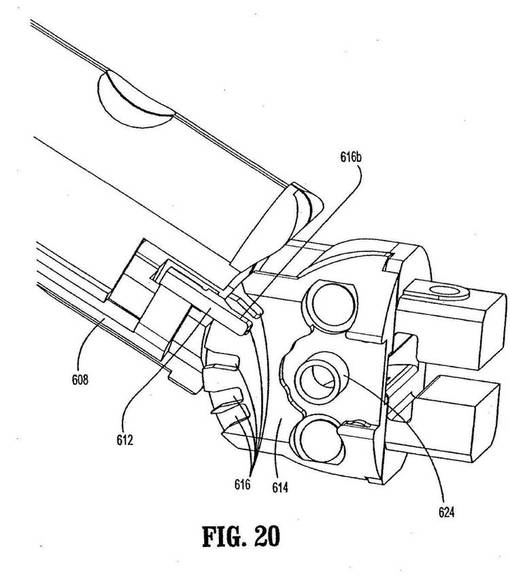
【図20】図20は、関節ツールアセンブリを関節運動位置にして示される、図16〜19のロックアセンブリの一部分の拡大斜視図である。
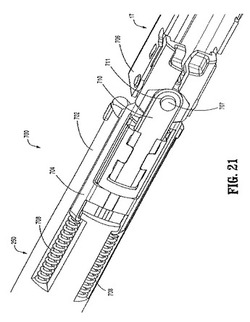
【図21】図21は、本開示の実施形態に従う外科用器具とともに使用するための別のロックアセンブリの一部分の拡大斜視図である。
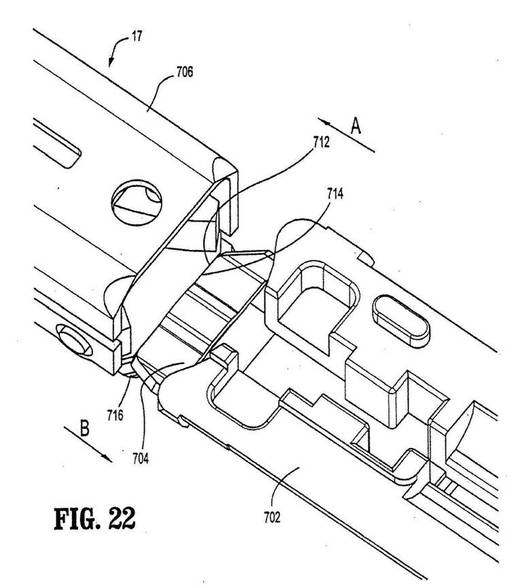
【図22】図22は、図21のロックアセンブリの拡大された下からの斜視図である。
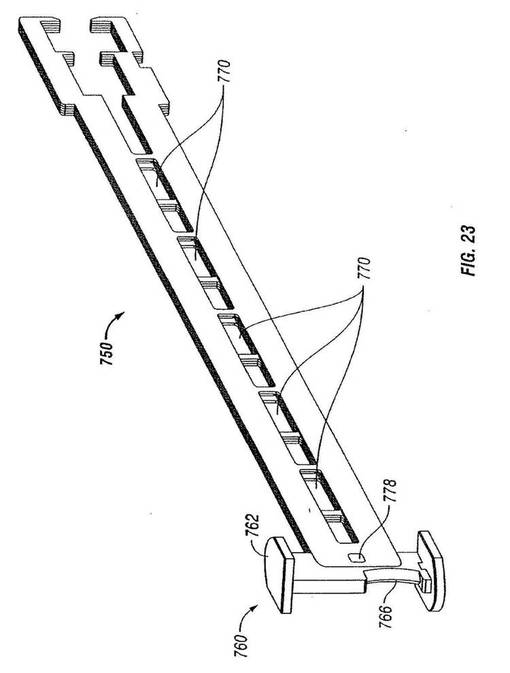
【図23】図23は、本開示の実施形態に従う複数の層を有する駆動ビームおよび閉鎖装置の斜視図である。
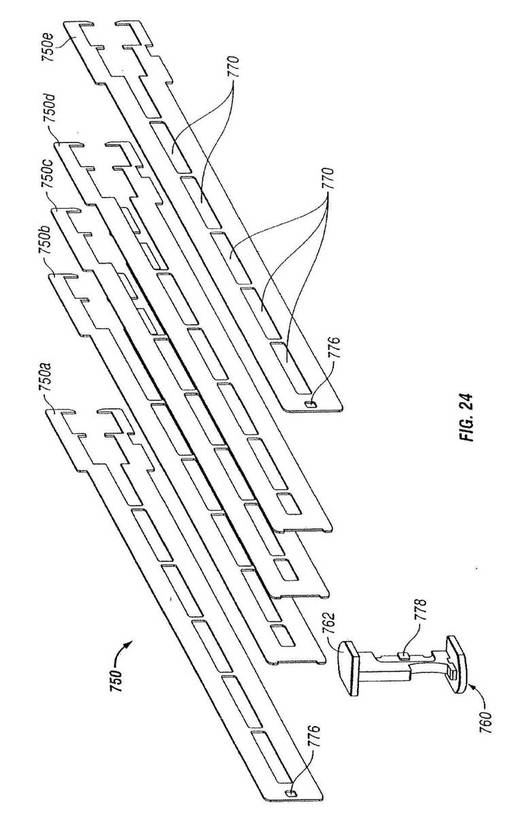
【図24】図24は、パーツが分離された図23の駆動ビームおよび閉鎖装置の斜視図である。
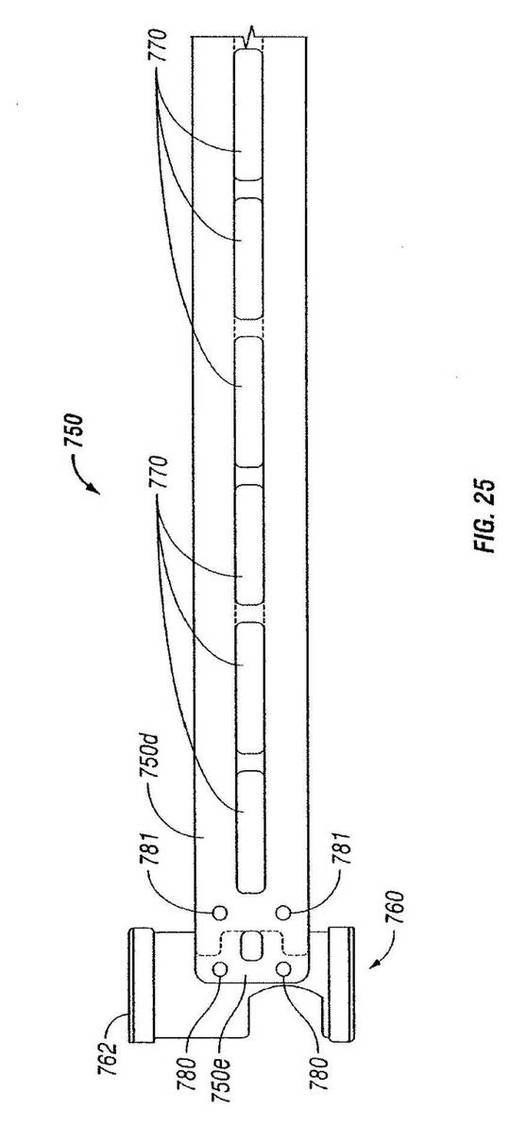
【図25】図25は、図23および24の駆動ビームおよび閉鎖装置の一部分の断面図である。
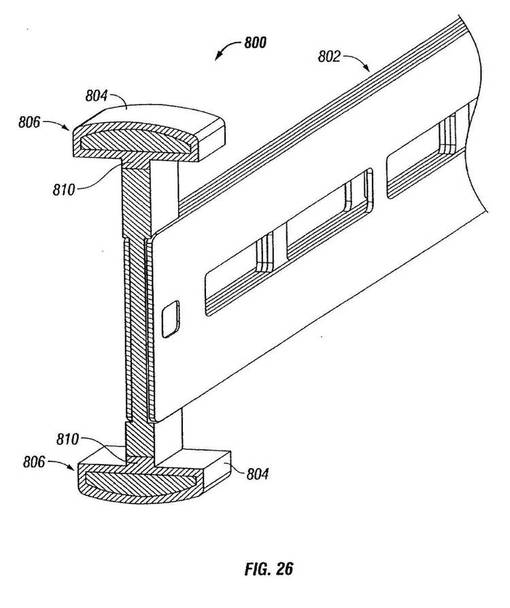
【図26】図26は、本開示の実施形態に従う駆動ビームおよび閉鎖装置の断面図である。
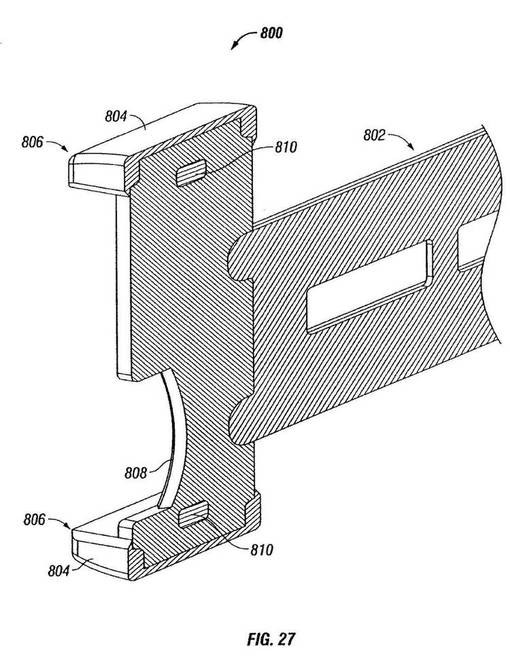
【図27】図27は、図26の駆動ビームおよび閉鎖装置の断面図である。
【図28】図28は、本開示の実施形態に従うツールアセンブリの斜視図である。
【図29】図29は、図28のツールアセンブリの組み立て図である。
【発明を実施するための形態】
【0030】
本明細書に開示される外科用器具およびDLUの実施形態は、ここで、図面を参照して詳細に説明され、図面では、同様の参照番号は、いくつかの図面の各々で同一または対応する要素を示す。
【0031】
図1を参照して、外科用器具500は、ハンドル部分510、本体部分512、および使い捨て可能な装填ユニット(「DLU」)16を含む。ハンドル部分510は、静止ハンドル514および移動可能なハンドルまたはトリガー516を含む。移動可能なハンドル516は、静止ハンドル514に対して移動可能であり、本体部分512の遠位端から突出する制御ロッド520を進行させる。ハンドル部分510および本体部分512は、米国特許第6,330,965号に開示される様式で構築され得、この特許は、本明細書中にその全体が参考として本明細書によって援用される。あるいは、その他の外科用器具がDLU16とともに用いられ得、内視鏡外科的手順を実施する。
【0032】
図1および1Aを参照して、簡単に述べれば、DLU16は、ツールアセンブリ17、近位本体部分200および取り付けアセンブリ202を含む。本体部分200は、外科用器具500の遠位端(図11)に、以下に詳細に論議される様式で離脱可能に係合するように構成された近位端を有する。取り付けアセンブリ202は、本体部分200の遠位端に旋回可能に固定され、ツールアセンブリ17の近位端に固定して取り付けられる。取り付けアセンブリ202の本体部分200の長手方向軸に垂直である軸の周りの旋回移動は、ツールアセンブリ17の長手方向軸が本体部分200の長手方向軸と一致させられる非関節運動位置と、ツールアセンブリ17の長手方向軸が本体部分200の長手方向軸と所定の角度で配置される関節運動位置との間のツールアセンブリ17の関節運動に影響する。
【0033】
図2〜4を参照して、ツールアセンブリ17は、カートリッジアセンブリ18およびアンビルアセンブリ20を含む。アンビルアセンブリ20は、複数のステープル変形窪み30(図4)を有するアンビル部分28、およびアンビル部分28の上面に固定されるカバープレート32を含む。カバープレート32およびアンビル部分28は、それらの間に駆動アセンブリ212の遠位端(図3)を受容するような寸法である窪み34(図4)を定義する。カバープレート32は、駆動アセンブリ212の遠位端を取り囲み、DLU16の作動の間に組織をつまむことを防ぐ。長軸方向スロット38がアンビル部分28を通って延び、駆動アセンブリ212の保持フランジ40の通過を容易にする。アンビル部分28上に形成されたカム作用面42が、駆動アセンブリ212の保持フランジ40上に支持される一対のカム部材40aと係合するように位置決めされ、アンビルとカートリッジアセンブリとを接近させる。一対の旋回部材44が形成される。一対の安定化部材50が、キャリア48上に形成された個々のショルダー52を係合し、カム作用面42が旋回部材44の周りで旋回されるとき、アンビル部分28が、ステープルカートリッジ54に対して軸方向に滑動することを防ぐ。
【0034】
カートリッジアセンブリ18は、ステープルカートリッジ54を受容するような寸法かつ形態である細長い支持チャネル56を定義するキャリア48を含む。ステープルカートリッジ54および支持チャネル56に沿ってそれぞれ形成された対応するタブ58およびスロット60は、支持チャネル56内の固定された位置でステープルカートリッジ54を保持するために機能する。ステープルカートリッジ54上に形成された一対の支持支柱62が、キャリア48の側壁上に静止するように位置決めされ、支持チャネル56内でステープルカートリッジ54をさらに安定化する。キャリア48は、アンビル部分28の旋回部材44を受容するためのスロット46を有し、そしてアンビル部分28が間隔を置いた位置と接近された位置との間を移動するようにする。
【0035】
ステープルカートリッジ54は、複数のステープルまたはファスナー66を受容するための保持スロット64(図2)、およびプッシャー68を含む。複数の側方に間隔を置いて配置された長手方向スロット70は、ステープルカートリッジ54を通って延び、作動スレッド74の直立するカムウェッジ72を収容する(図2)。中央長軸方向スロット76が、ステープルカートリッジ54の実質的に長さに沿って延び、ナイフブレード78の通過を容易にする(図4)。外科用ステープラー10の作動の間に、駆動アセンブリ212は作動スレッド74に接し、そして作動スレッド74をステープルカートリッジ54の長軸方向スロット70を通って押し、カムウェッジ72をプッシャー68との連続的接触に進める。プッシャー68は、ファスナー保持スロット64内のカムウェッジ72に沿って垂直方向に並進し、ファスナー66を保持スロット64からアンビルアセンブリ20のステープル変形窪み30(図4)中に押す。
【0036】
図3を参照して、取り付けアセンブリ235は、上部取り付け部分236および下部取り付け部分238を含む。中心に配置された旋回部材284は、上部取り付け部分236から、第1のカップリング部材246中に形成された個々の開口部246aを通って延びる。下部取り付け部分238は、旋回部材284を受容するためのボア239を含む(図3Fを参照のこと)。旋回部材284は、-ボア239および第2のカップリング部材2
47の開口部247aを通って延びる。カップリング部材246、247の各々は、上部ハウジリグ半分体250および下部ハウジング半分体252から形成される内部ハンジングの遠位端中に形成される溝290中に受容されるよう構成された相互ロックする近位部分246b、247bを含む。カップリング部材246、247は、取り付けアセンブリ235と、上部ハウジリグ半分体250および下部ハウジング半分体252とを互いに対して長手方向に固定された位置に保持し、その一方、それに対する取り付けアセンブリ235の旋回移動を許容する。
【0037】
図3A〜3Cを参照して、各カップリング部材246、247は、取り付けアセンブリ235と係合するように位置決めされた遠位端246dを有する片持ちスプリングアーム246cを含む。より詳細には、上部取り付け部分236は、個々のカップリング部材246のスプリングアーム246cの遠位端246dを受容するような寸法である窪み236bを含む上面236aを含む。下部取り付け部分238は、個々のカップリング部材247のスプリングアーム247cを受容するような寸法である窪み238cを定義する一対の高くなった面238bを有する底面238aを含む。あるいは、少なくとも1つの窪みがツールアセンブリ17の近位端に形成され得る。
【0038】
図3D〜3Gに示されるように、カップリング部材246、247のスプリングアーム246c、247cの遠位端が、上部取り付け部分236および下部取り付け部分238の窪み236bおよび238cにそれぞれ位置決めされるとき、スプリングアーム246c、247cは、取り付けアセンブリ235を非関節運動位置に保持する。スプリングアーム246c、247cは、取り付けアセンブリ235を、スプリングアーム246cを窪み236bおよび238cから曲げるのに十分な所定の力が付与されて、取り付けアセンブリ235およびツールアセンブリ17の関節運動を行うまで、その非関節運動位置に保持する。所定の力が取り付けアセンブリ235およびツールアセンブリ17に付与されるとき、スプリングアーム246c、247cは、図3Eおよらび3Gに示されるように窪み236bおよび238cから外方に跳ねるか、または曲がり、取り付けアンセンブリ235(そして、それ故、ツールアセンブリ17)の、DLU16の近位本体部分200の遠位端に対する旋回移動を許容する。
【0039】
上記で論議されたように、スプリングアーム246cならびに窪み236bおよび238cは、ツールアセンブリ17を、所定の力が取り付けアンセブリ235に付与されて、スプリングアーム246c、247cの取り付けアセンブリ235の窪み236bおよび238cとの係合を解くまで、その非関節運動位置に維持する。これらのスプリングアーム/窪みは、ステープラー、把持器(図3Hを参照のこと)、電力シールデバイス、例えば、RFシールデバイスなどを含む任意の関節外科用デバイス中に組み込まれ得ることが想定される。さらに、2つのスプリングアーム/窪みが示されるけれども、単一のスプリングアームが提供され得る。さらに、上記関節ツールアセンブリは、DLUのパーツを形成する必要はなく、むしろ、外科用器具の遠位端上に直接支持され得る。例えば、取り付けアセンブリは、ツールアセンブリに取り外し可能または取り外し不能に固定され得、さらに外科用器具の遠位端に直接固定される。
【0040】
上部ハウジング半分体250および下部ハウジング半分体252は、本体部分200の外側スリーブ251内に含まれる(図3)。本体部分200は、上部ハウジング半分体250上に形成されるボスまたは突出部250aを受容するような寸法の切り抜き251aを含む。切り抜き251a内の突出部250aの位置決めは、本体部分200の外側スリーブ251内で下部ハウジング半分体250および上部ハウジング半分体252の軸方向移動および回転移動を防ぐ。1つの実施形態では、ボス250aは、横方向寸法より大きい軸方向寸法を有する実質的に矩形の形状を有する。より大きな軸方向寸法は、スリーブ251内の上部ハウジング半分体250および下部ハウジング半分体252の回転を防ぐための増加した表面積を提供する。ボス250aの近位部分250bは傾斜している。傾斜した近位部分250bは、上部ハウジング半分体250および下部ハウジング半分体252がスリーブ251内に位置決めされるとき、スリーブ251がボス250a上を滑動することを可能にする。ボス250aは、例えば、円形、矩形、三角形などのその他の形態をとり得、そしてなおその意図される機能を達成することが予想される。さらに、ボス250aは、上部ハウジング半分体250に沿ったいずれの場所にも再位置決めされ得るか、またはそれに代わって、下部ハウジング半分体252上、もしくは各ハウジング半分体250および252上に部分的に位置決めされ得る。
【0041】
上部ハウジング半分体250の近位端または挿入先端部193は、差し込みタイプ様式(図1Aおよび7を参照のこと)で、外科用器具の遠位端に離脱可能に係合するための係合ナブ254を含む。ハウジング半分体250および252は、その中に軸方向駆動アセンブリ212を滑動可能に受容するためのチャネル400を定義する。関節リンク256は、上部ハウジング半分体250と下部ハウジング半分体252との間に形成されたスロット402内に滑動可能に位置決めされるような寸法である。一対のH−ブロックアセンブリ255は、ハウジング部分200の遠位端に隣接し、かつ軸方向駆動アセンブリ212の遠位端に隣接して位置決めされて、外科用ステープル留め装置10の関節運動および発射の間の駆動アセンブリ212の外方への歪みおよび膨らみを防ぐ。各H−ブロックアセンブリ255は、本体部分200に固定して取り付けられた近位端、および取り付けアセンブリ235に固定して取り付けられた遠位端を含む可撓性本体255aを含む(図3)。
【0042】
保持部材288は、軸方向駆動アセンブリ212の係合セクション270上に支持される。保持部材288は、下部ハウジング半分体252中に形成されたスロットまたは窪み252a内に離脱可能に配置される一対のフィンガー288aを含む。作動において、SULU16が外科用器具に取り付けられ、そして軸方向駆動アセンブリ212が外科用器具500の作動部材516に所定の力を付与することによって作動されるとき(図11)、軸方向駆動アセンブリ212は遠位側に進行させられて、駆動アセンブリ212および保持部材288を遠位側に移動させる。保持部材288が遠位側に進行させられるとき、フィンガー288aは窪み252aから押されて、外科用器具が作動されたことの音響および触覚指標を提供する。保持部材288は、所定の軸方向の力が軸方向駆動アセンブリ212に付与されるまで、DLU16内の固定された位置で軸方向駆動アセンブリ212を維持することにより、例えば輸送の間に、DLU16の不注意な部分的作動を防ぐよう設計されている。
【0043】
軸方向駆動アセンブリ212は、遠位仕事ヘッド268および近位係合セクション270を含む細長い駆動ビーム266を含む。1つの実施形態では、駆動ビーム266は、複数のスタックされた材料シートから構成される。係合セクション270は、駆動部材272中に形成された対応する一対の保持スロットを実装して係合する一対の弾性係合フィンガー270aおよび270bを含む。駆動部材272は、DLU16の近位端が外科用器具500の本体部分512と係合されるとき、外科用器具の制御ロッド520(図11)の遠位端を受容するように構成された近位出入口を含む。
【0044】
図5〜10をまた参照して、DLU16はさらに、ロック部材300およびロック部材アクチュエーター302を含むロック機構を含む。ロック部材300(図6)は、DLU16の本体部分200の上部ハウジング半分体250の近位部分中に形成された長手方向または軸方向スロット310(図7)内に回転可能に支持される。ロック部材300は、ロック部材300が駆動アセンブリ212を発射前位置に維持する第1の位置(図7および8)から、駆動アセンブリ212が自由に軸方向に移動する第2の位置(図9および10)まで移動可能である。
【0045】
図6に示されるように、ロック部材300は、本体部分200の上部ハウジング半分体250中に形成される横方向スロット310内に滑動可能に位置決めされる半円筒形本体312を含む。本体312は、半径方向の内方に延びるカム部材314および半径方向に内方に延びるフィンガー316を含む。フィンガー316は、駆動アセンブリ212中に形成されたノッチまたはスロット270c(図3)内に滑動可能に受容される寸法である。駆動アセンブリ212のノッチ270cにおけるフィンガー316の係合は、駆動アセンブリ212が本体部分200内で直線状に移動することを防ぎ、そしてそれ故、DLU16の作動を防ぐ。
【0046】
図3、5および7を参照して、ロック部材アクチュエーター302は、DLU16の本体部分200の上部ハウジング半分体250中に形成された軸方向スロット320(図7)内に滑動可能に位置決めされる。アクチュエーター302は、近位接触部材322、遠位スプリングガイド324、および中央カムスロット326を含む。軸方向スロット320は、横方向スロット310と、ロック部材300のカム部材314がロック部材アクチュエーター302のカムスロット326内に滑動可能に位置決めされるように交差する。付勢部材またはスプリング328(図7)は、アクチュエーター302の遠位面330と軸方向スロット320の遠位端を定義する壁332(図7)との間のスプリングガイド324の周りに配置される。スプリング328は、アクチュエーター302を軸方向スロット320内のその退却位置まで押す。その退却された位置で、接触部材322は、近位本体部分200の挿入先端部193に隣接するDLU16の近位端上に位置決めされて、半径方向の外方に延び、そしてカムスロット326は、カム部材314を、ロック部材300のフィンガー316が駆動アセンブリ212のノッチ270c内に配置されるように位置決めするよう配置される。
【0047】
図11〜15は、DLU16の外科用器具500への取り付けの前およびその間のDLU16および外科用器具500を示す。DLU16の外科用器具500上への取り付けの前に、スプリング328は、アクチュエーター302をその退却位置まで押して、上記で論議されたように、ロック部材300をそのロックされた位置まで移動させる。DLU16の挿入先端部193が外科用器具500の本体部分512(図13)の開放端部522(図11)中に直線状に挿入されるとき、ナブ254が、本体部分512の開放端部522中に形成されたスロット(図示されず)を通って直線状に移動する。ナブ254がスロットを通過するとき、ナブ254から角度をなしてオフセットされる接触部材322の近位端322aは、ナブ254を受容するためのスロットを定義する壁276cに接する。DLU16が本体部分512中にさらに移動するとき、ロック部材アクチュエーター302は、その退却位置からその進行位置まで図14中矢印「T」によって示される方向に移動する。アクチュエーター302が、その進行位置に移動するとき、ロック部材300は、駆動アセンブリ212と係合されるそのロック位置(図8)から、その非ロック位置(図10)まで図14中、矢印「U」によって示される方向にカム運動により移動し、フィンガー316をノッチ270cから移動させる。ロック部材300およびロック部材アクチュエーター302を含むロック機構は、DLU16の外科用器具500上への装填の間のように、DLU16の駆動部材の偶発的なまたは不注意による進行または操作を防ぐ。
【0048】
DLU16が、器具500に対して直線状に、本体部分200の近位面530が本体部分512の内面276cに接する位置(図15)まで移動したとき、DLU16は、差し込みタイプ作用で本体部分512に対して回転されることにより、本体部分512の開口部536内にナブ254を位置決めして、DLU16を本体部分512上にロックし得る。差し込みカップリング以外のその他のカップリングタイプが、DLU16を器具500に連結するために用いられ得ることが想定され、例えば、スプリング移動止め、またはスナップ嵌めカップリング、摩擦嵌めカップリング、相互ロック部材、ねじ山カップリングなどがある。
【0049】
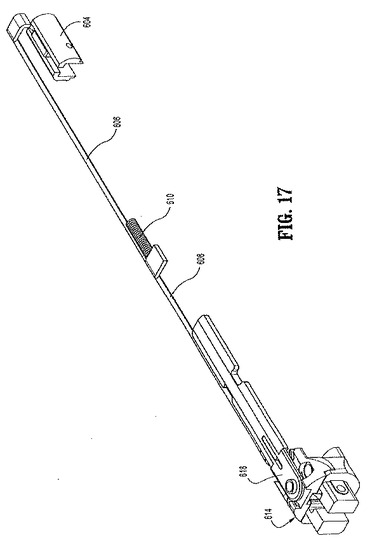
図16〜20に示される本開示の実施形態では、外科用器具500および使い捨て可能な装填ユニット16(例えば、図1を参照のこと)とともに使用するためのロックアセンブリ600が示される。示される実施形態では、ロックアセンブリ600は、ハウジング602、プッシャー604、ロッド606、スライド608、少なくとも1つのスプリング610、カムフィンガー612、スロット616を有するピボットプレート614およびリンク618を含む。ロックアセンブリ600は、一般に、外科用器具500の発射の間に、ツールアセンブリ17(例えば、図1を参照のこと)をその位置に維持することを支援する。
【0050】
図16および17を参照して、ロックアセンブリ600の一部分は、ハウジング602内に少なくとも部分的に含まれる。図16は、ハウジング602に関連して配置されたロックアセンブリ600を示し、その一方、図17は、ハウジング602から分離されたロックアセンブリ600を示す。示される図17の実施形態では、プッシャー604は、それから遠位側に延びるロッド606とともに示される。スライド608は、ロッド606から遠位側に延び、そしてそれと滑動可能な関係にあり、それ故、スライド608がロッド606に対して軸方向に移動することを可能にする。スプリング610または一対のスプリング(この実施形態では明瞭に示されていない)は、スライド608をロッド606から遠位側に付勢する。
【0051】
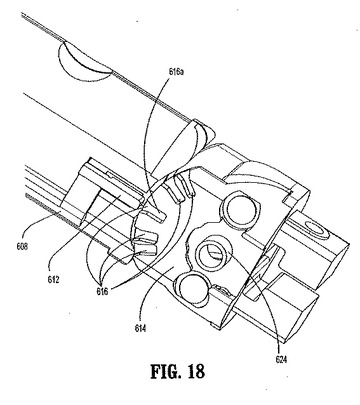
ここで、図18〜20を参照して、カムフィンガー612およびピボットプレート614が示される。カムフィンガー612はスライド608から遠位側に延び、そしてピボットプレート614は、例えば、取り付けアセンブリ235上に配置され得る(図13を参照のこと)。ピボットプレート614は、ツールアセンブリ17上に配置され得るか、またはその一部分に組み込まれ得ることが予想される。複数のスロット616(5つのスロット616が図示される)が、ピボットプレート614上に配置され、そしてその中にカムフィンガー612の少なくとも一部分を受容するようなサイズである。本体部分512(例えば、図1を参照のこと)に対し(実質的な関節運動のないことを含む)、ツールアセンブリ17の異なる量の関節運動に際し、カムフィンガー612は、ピボットプレート614の個々のスロット616とほぼ一致する。図18および19は、中央スロット616a(図19中の視界からは隠されている)と実質的に一致したカムフィンガー612を示し、そして図20は、側方スロット616bと実質的に一致したカムフィンガー612を示す。
【0052】
図17および19に示されるリンク618は、ピボットプレート614とカムフィンガー612とに機械的に係合している。(図18では、リンクは除かれている。)リンク618は、開口部620およびスロット622を有して示される(図19)。開口部620は、ピポットプレート614上のボス624に対して旋回する関係にあり、そしてスロット622は、カムフィンガー612と滑動可能に係合される。この関係は、本体部分512に対するピポットプレート614の関節運動、およびピポットプレート614に対するスライド608の長手方向並進を可能にする。
【0053】
操作において、移動可能ハンドル516の少なくとも部分的な関節運動に際し(例えば、図1を参照のこと)、プッシャー604は、例えば、制御ロッド(例えば、図11を参照のこと)を経由して遠位側に押され、それ故、ピポットプレート614のスロット616中に少なくとも部分的にカムフィンガー612の遠位側並進を引き起こす。カートリッジアセンブリ18およびアンビルアセンブリ20を接近させるために移動可能なハンドル516を作動させることは(例えば、図1Aを参照のこと)また、カムフィンガー612を遠位側に並進させるよう作用することが想定される。このような実施形態では、関節ツールアセンブリ17がその場にあり、そして組織に対してクランプするとき、(例えば、移動可能ハンドル516を解放することなく)さらなる関節運動を達成することはできない。従って、ロックアセンブリ600は、ステープルを例えば組織中に据え付ける前に、関節ツールアセンブリ17を本体部分512に対してその場に維持することを支援する。
【0054】
上記で論議されたように、スプリング610は、スライド608をロッド606から遠位側に付勢する。スプリング610によって提供されるこの付勢は、カムフィンガー612がピポットプレート614のスロット616から偶発的または早まって移動されないことを確実にすることを支援し、これは、それらの間に有意な量の「遊び」を生じ得る。さらに、スプリング610によって提供される遠位側への付勢は、スライド608とピポットプレート614との間に存在する製造許容誤差および/または隙間を削除することを支援する。カムフィンガー612および/またはスロット616の少なくとも一部分は、それらの間の意図されない移動を減少させることを支援するようにくさび型形状であり得ることもまた想定される。このような実施形態では、カムフィンガー612およびスロット616の遠位部分は、対応する近位部分より狭くあり得る。
【0055】
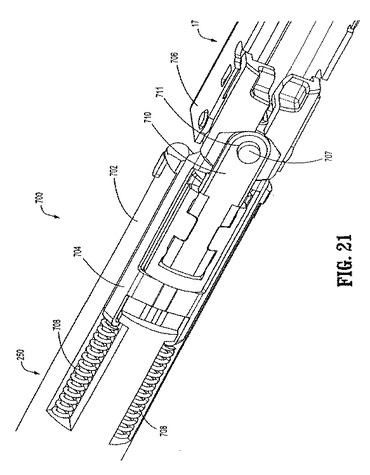
図21および22に示される本開示の実施形態では、外科用器具500および使い捨て可能な装填ユニット16(例えば、図1を参照のこと)とともに使用するためのロックアセンブリ700が示される。示される実施形態では、ロックアセンブリ700は、アダプター702、プッシャー704、ピボット706、付勢要素(例えば、一対のスプリング708)およびリンク710を含む。ロックアセンブリ700は、一般に、ツールアセンブリ17を所定の位置に維持することを支援する。
【0056】
図21を参照して、ロックアセンブリ700のアダプター702は、外科用器具500の本体512(例えば、図1を参照のこと)内、または使い捨て可能な装填ユニット16内にほぼ収容される。図示される実施形態では、プッシャー704は、一対のスプリング708の遠位側に配置される。プッシャー704は、一対のスプリング708を経由して関節ツールアセンブリ17のピボット706に向かって遠位側に付勢される。プッシャー704の遠位部分は、ピボット706の近位部分に隣接して配置されるピボット嵌合面714(図22)と嵌合する形状および寸法のプッシャー嵌合面712(図22)を含む。プッシャー704の一部分と機械的に協動し、そしてピボット706の一部分に旋回可能に連結されたリンク710が示され、それ故、関節ツールアセンブリ17が、本体部分512に対し、その第1の位置とその第2の位置との間を移動することを可能にする。より詳細には、リンク710は、ピボット706の突出部707上に適合する開口部711を含み、それ故、それらの間の旋回移動を可能にする。さらに、リンク710は、アダプター702の一部分と滑動可能に係合され、それ故、それらの間の長手方向の移動を可能にする。
【0057】
ここで、図22を参照して、プッシャー嵌合面712は、この実施形態では、その長さの大部分に沿って実質的に平坦である。同様に、ピボット嵌合面714はまた、図示された実施形態ではその長さの大部分に沿って平坦である。それ故、一対のスプリング708を経由するプッシャー704のピボット706に向かう遠位側付勢(矢印Aの方向)は、
関節アセンブリ17をその第1の非関節運動位置に維持することを支援する。なぜなら、この付勢力は、関節ツールアセンブリ17が旋回に抵抗することを支援するからである。2つのスプリング708が示されるけれども、より多く、またはより少ないスプリング708が提供され得る。
【0058】
関節ツール17をその第1の非関節運動位置から旋回するために、対のスプリング708からの遠位側付勢力が乗り越えられなければならない。このような旋回作用は、プッシャー704を、対のスプリング708の付勢に対して近位方向(矢印Bの方向)に移動させる。プッシャー嵌合面714は、(この実施形態では明瞭に示されていないが)移動止めを含むことにより、関節顎部材17を選択された関節運動位置に安定化することを支援する。
【0059】
図22を続いて参照し、ピボット706は、その上のシェルフ716を含む。図22に示されるように、シェルフ716は、プッシャー嵌合面712がピボット嵌合面714と接触するとき、プッシャー704の少なくとも一部分と重複する。シェルフ716は、関節ツールアセンブリ17が回転され、そして/または関節運動されるとき、プッシャー704とピボット706との間に組織がつままれることを防ぐことを支援するように配置され、かつ構成されている。
【0060】
図23〜25に示される本開示の実施形態では、複数の層750a〜750eを有する複数層の駆動ビーム750が示され、そして使い捨て可能な装填ユニット16(例えば、図1を参照のこと)中に含まれ得る。I−ビームのような閉鎖装置760もまた示される。閉鎖装置760は、図2を参照して上記で詳細に説明されたように、ツールアセンブリ17に接近するためにカム作用面42(またはその他の接触面)中に進行可能である水平部分762を含む。
【0061】
図24を参照して、5つの層750a〜750eを有する複数層の駆動ビーム750が示される。より少ないか、またはより多い層を用いて複数層の駆動ビーム750を形成し得ることが想定され、そして本開示の範囲内である。複数層の駆動ビーム750が、本開示のその他の実施形態における駆動ビーム266を置換し得ることもまた想定される。複数層の駆動ビーム750の使用は、使用の間、特に、例えば、ツールアセンブリ17がその関節運動位置にある間に、増加した強度および可撓性を提供し得る。
【0062】
図23〜25に、複数層の駆動ビーム750の各層を通って延びる複数の切り抜き770が示される。これらの図は、複数層の駆動ビーム750の層あたり、5〜10の間の切り抜きを示しているけれども、切り抜き770の正確な数は、5より少なく、5と10との間、または10より多くあり得る。さらに、駆動ビーム750の隣接する層の切り抜き770は、互いに一致していても良いし、していなくても良い。切り抜き770の使用は、駆動ビーム750の断面寸法を減少し、そして偏向力調節を可能にする。矩形の切り抜き770が示されているけれども、その他の矩形または非矩形形状を有する切り抜き770の使用もまた企図される。
【0063】
複数層の駆動ビーム750の各層750a〜750eの取り付け、および閉鎖装置760への取り付けは、図25に示される。示される実施形態では、外側層(図24の750aまたは750e)は、例えば、一対のスポット溶接により、2つの位置(各位置は、図25で番号780によって示される)で閉鎖装置760に固定される。各外側層750a、750eは、閉鎖装置760から突出するボス778上に適合するアパーチャ776を含むことがまた想定される。各外側層750a、750eはまた、恐らくは、一対のスポット溶接により2つの位置(各位置は、図25で番号781によって示される)で隣接する層(例えば、750bまたは750d)に固定される。さらに、各内側層(例えば、750b、750cおよび750d)は、例えば、スポット溶接を経由して2つの位置で隣接する内側層に付着される(例えば、750bは750cに付着され;750cは750bおよび750dに付着され;そして750dは750cに付着される)。スポット溶接が付着方法として開示されているけれども、各層を互いに、そして外側層を閉鎖装置に付着するためのその他の方法が想定され、これは本開示の範囲内である。示された実施形態は、閉鎖装置760に隣接する内側層の付着点780を示すが、これら付着点780が駆動ビーム750のその他の位置に配置されることが想定され、これは本開示の範囲内である。さらに、駆動ビーム750の少なくとも1つの層が、ステンレス鋼のような金属から作製されることが想定される。駆動ビーム750および/または閉鎖装置760の一部分はまた、以下に説明されるように、プラスチック材料から作製され得るか、またはプラスチック材料で少なくとも部分的に被覆され得る。さらに、閉鎖装置790は、その上の、組織を切断するための切断面(図23)を含み得る。
【0064】
図26および27に示される本開示の実施形態では、閉鎖装置800および駆動ビーム802の一部分が示される。閉鎖装置および/またはツールアセンブリ(例えば、図2を参照のこと)の接触面(例えば、カム作用面42)は、プラスチック面またはプラスチック被覆を含み得る。この実施形態では、閉鎖装置800の水平部分806を少なくとも部分的に被覆する一対のキャップ804を有する閉鎖装置800が示される。キャップ804は、この実施形態ではプラスチックから作製され得る。このような閉鎖装置800および/またはツールアセンブリ17の接触面上に配置されるプラスチック表面は、2つの金属表面に対してそれらの間の摩擦の量を一般に低減する。すなわち、金属に対するプラスチック、またはプラスチックに対するプラスチックの相互作用は、一対の金属表面間の相互作用より少ない摩擦を生成し得る。この減少した摩擦の量は、減少した発射力に対応し得る。
【0065】
一対のキャップ804のような閉鎖装置800の一部分は、プラスチックから作製されるか、プラスチックでオーバーモールドされるか、またはプラスチック被覆を含むことが想定される。さらに、ツールアセンブリ17の接触面、またはその少なくとも一部分がまた、プラスチックから作製されるか、プラスチックでオーバーモールドされるか、またはプラスチック被覆を含み得る。
【0066】
本開示の実施形態では、閉鎖装置800は、図26および27に示されるように、I−形状断面を含み得る。さらに、閉鎖装置800および駆動ビーム802は、使い捨て可能な装填ユニット16の一部、および/または関節運動し得る外科用器具の一部であり得る。さらに、駆動ビーム802は、単一の層または(図26に示されるような)複数の層を含み得、そして少なくとも駆動ビーム802の一部分はプラスチックから作製され得る。なお、さらに、閉鎖装置800は、組織を切断するための、その上の切断面808(図27)を含み得る。
【0067】
図26および27を続いて参照し、プラスチックキャップ804は、閉鎖装置800の強度を増加し得るか、またはキャップ804と閉鎖装置800の水平部分806との間により強力な連結を提供し得る補強セクション810を含み得る。キャップ804が閉鎖装置800に離脱可能に付着され得ることがまた想定される。このような実施形態では、キャップ804は、なんらかの実質的な摩耗または損傷が生じた場合に取り外され、そして置換され得る。
【0068】
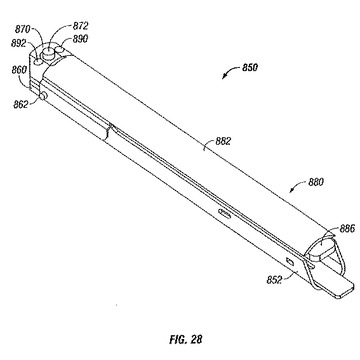
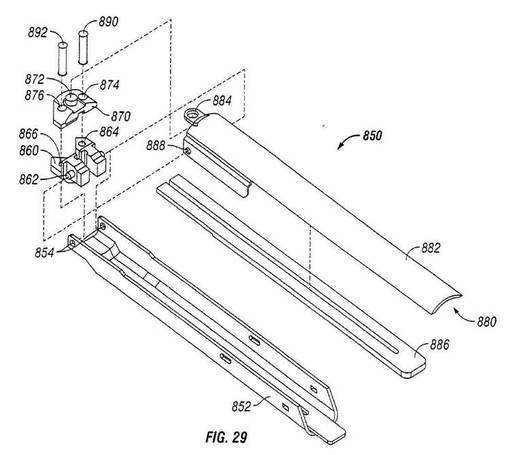
図28および29に示される本開示の実施形態では、ツールアセンブリ850が示される。この実施形態のツールアセンブリ850は、チャネル852、第1の取り付け部材860、第2の取り付け部材870、アンビルアセンブリ880、第1の取り付けロッド890および第2の取り付けロッド892を含む。第1の取り付けロッド890および第2の取り付けロッド892は、ツールアセンブリ850の要素が一緒のままであることを促進する強力な連結を提供する。
【0069】
チャネル852はその近位端に隣接する開口部854(2つの開口部が示される)を含み、そして第1の取り付け部材860はそれから延びるボス862を含む(2つのボスが示される)。チャネル852は、ボス862(単数または複数)上に開口部854(単数または複数)を配置することによって第1の取り付け部材に連結可能であり、それ故、それらの間での旋回連結を提供する。この実施形態では明瞭に示されていないけれども、チャネル852は、複数の外科用ファスナーまたはステープルカートリッジを収容し得る。
【0070】
アンビルアセンブリ880は、アンビルカバー882およびアンビル886を含む。アンビル886は、例えば、スナップ嵌め連結を経由して、アンビルカバー882と機械的に係合するために構成されている。アパーチャ884が、アンビルカバー882の一部分を少なくとも部分的に通って延びる。アパーチャ884は、第2の取り付け部材870上に配置された突出部872上に適合するように構成されており、それによって、アンビルアセンブリ880と第2の取り付け部材870との間の連結を提供する。さらに、アンビルカバー882は、この開示の実施形態ではそれを通って少なくとも部分的に延びる少なくとも1つの開口部888を含む。開口部888は、第1の取り付け部材860のボス862上に適合するように構成されている。このような実施形態では、アンビルアセンブリ880は、第1の取り付け部材860および第2の取り付け部材870に対して旋回され得る。
【0071】
第1の取り付け部材860は、それを通って延びる第1の開口部864および第2の開口部866を含む。第2の取り付け部材870はまた、それを通って延びる第1の開口部874および第2の開口部876を含む(図29)。さらに、第1の取り付け部材860および第2の取り付け部材870は、第1の開口部864、874が実質的に一致し、そして第2の開口部866、874が実施的に一致するように機械的に係合している。
【0072】
第1の取り付け部材860を第2の取り付け部材870と(そしてそれ故、チャネル852とアンビルアセンブリ880とを)固定するために、第1の取り付けロッド890、またはその一部分は、第1の開口部864および874を通って挿入される。ツールアセンブリ850の要素をさらに固定するために、第2の取り付けロッド892、またはその一部分が、第2の開口部866および876を通って挿入される。第1の取り付けロッド890および/または第2の取り付けロッド892は、締め付け可能である2部分リベットのようなリベットであることが想定される。
【0073】
本開示の1つの実施形態では、ツールアセンブリ850は、関節運動し得る、使い捨て可能な装填ユニットのパーツである。ツールアセンブリ850の関節運動は、第2の取り付け部材870から延びる突出部874および(図21中のリンク710のような)リンクを経由して、外科用器具の本体部分にツールアセンブリ850を旋回可能に取り付けることにより促進され得る。さらに、上記に記載されたような、ツールアセンブリ850を組み立てる方法が、本開示によって企図される。
【0074】
種々の改変が本明細書に開示される実施形態になされ得ることが理解される。例えば、上記に記載のロックアセンブリは、DLUを含む種々の外科用器具に取り込まれ得、そして直線状のステープラー上の使用に制限されない。さらに、このDLUは、開示されたものとは対照的に、外科用器具の挿入先端部を受容するような形態であり得る。従って、上記の説明は、制限的であるとは解釈されるべきではなく、種々の実施形態の単なる例示である。当業者は、本明細書に添付された特許請求の範囲の範疇および精神の内でその他の改変を想定するものである。
【符号の説明】
【0075】
16 使い捨て可能な装填ユニット
17 ツールアセンブリ
200 近位本体部分
202 取り付けアセンブリ
500 外科用器具
510 ハンドル部分
512 本体部分
514 静止ハンドル
516 トリガー
【技術分野】
【0001】
本開示は、ロックアセンブリを含む外科用器具および使い捨て可能な装填ユニットに関する。より詳細には、本開示は、関節外科用器具、例えば、所定の位置にある直線状ステープラーのツールアセンブリを保持するためのロックアセンブリを含む外科用器具に関する。
【背景技術】
【0002】
関節のために外科用器具の本体部分の遠位端上に取り付けられたツールアセンブリを含む外科用器具は周知である。代表的には、このような外科用器具は、操作者が外科用器具の本体部分に対して上記ツールアセンブリを遠隔的に関節運動させて、操作者が組織に、より容易に接近し、組織を手術し、そして/または組織を操作することを可能にする関節制御機構を含む。
【0003】
このような関節ツールアセンブリが、特に内視鏡外科的手順において所望されるようになった。内視鏡外科的手順では、外科用器具の遠位端は、手術部位に接近するために身体中の小切開を通じて挿入される。代表的には、適切なサイズ、例えば、5mm、10mmのカニューレが、この身体の切開を通じて挿入され、手術部位に接近するための案内チャネルを提供する。より少ない瘢痕、患者に対する低減された外傷、より早い治癒時間が存在するように小さな身体切開を提供することが所望されるので、外科用器具とカニューレの内径との間の許容誤差は小さい。
【0004】
内視鏡手順の間に関節ツールアセンブリを有する外科用器具が用いられるとき、この関節ツールアセンブリは、カニューレまたは小さな身体切開を通るツールアセンブリの挿入の間に、一般にその関節運動されない位置(すなわち、このツールアセンブリの長手方向軸が外科用器具の本体部分の長手方向軸と一致した位置)にある。このツールアセンブリの関節運動された位置への移動は、外科用器具の本体部分とわずかにずれているときでさえ、カニューレまたは小さな切開を通る外科用器具の遠位端の挿入を妨害、および/または防ぎ得る。
【0005】
関節ツールアセンブリを有する外科用器具の操作または取り扱いの間に、ツールアセンブリは、このツールアセンブリが、偶然に非関節運動位置から関節運動位置まで移動するように、震動させられるか、または動揺させられることは一般的ではない。上記で論議されたように、これは、特に、この外科用器具が内視鏡手順で用いられ得る場合に所望されない。さらに、ツールアセンブリがハンドル部分に対してその位置を保持する能力は、外科医がこのツールアセブリを用いて如何に良好に組織を操作し得るかに影響する。
【発明の概要】
【発明が解決しようとする課題】
【0006】
したがって、所定の位置にある直線状ステープラーのツールアセンブリを保持するためのロックアセンブリを含む外科用器具が必要とされる。
【課題を解決するための手段】
【0007】
本開示は、ハンドル部分、本体部分、関節ツールアセンブリおよびロックアセンブリを含む外科用器具に関する。この本体部分は、上記ハンドル部分から遠位側に延び、第1の長手-方向軸を定義する。上記関節ツールアセンブリは第2の長手方向軸を定義し、本体
部分の遠位端に配置され、この第2の長手-方向軸が上記第1の長手方向軸と実質的に一
致する第1の位置から、少なくとも上記第2の長手方向軸が上記第1の長手方向軸に対して所定の角度をなす第2の位置まで移動可能である。上記ロックアセンブリは、上記本体部分と機械的に協動するプッシャーと、上記関節ツールアセンブリと機械的に協動するピボットとを含む。上記プッシャーは、上記ピボット上のピボット嵌合面と嵌合するような寸法の嵌合面を含む。このプッシャーは、上記ピボットに向かって(例えば、上記本体部分と機械的に協動するスプリングを経由して)遠位側に付勢され、上記関節ツールアセンブリが上記第2の位置に移動されるとき近位側に押される。
【0008】
本開示の実施形態では、上記プッシャーの嵌合面および/またはピボットの嵌合面は、その長さの大部分に沿って実質的に平坦である。上記ロックアセンブリが上記ピボットおよびプッシャーと機械的に係合するリンクを含むこともまた開示される。1つの実施形態では、このリンクは、上記ピボットと旋回可能に係合している。本開示の別の実施形態では、このピボットは、上記プッシャー嵌合面が上記ピボット嵌合面と接触するとき、プッシャーの少なくとも一部分と重複するシェルフを含む。
【0009】
開示される実施形態では、上記関節アセンブリは、使い捨て装填ユニットの一部分である。本開示は、上記に記載のような関節ツールアセンブリおよびロックアセンブリを含む使い捨て可能な装填ユニットにも関する。
【0010】
本発明は、さらに、以下の手段を提供する。
【0011】
(項目1)
外科用器具であって、
ハンドル部分と、
該ハンドル部分から遠位側に延び、第1の長手-方向軸を定義する本体部分と、
第2の長手方向軸を定義する関節ツールアセンブリであって、該本体部分の遠位端に配置され、該第2の長手-方向軸が該第1の長手方向軸と実質的に一致する第1の位置から
、少なくとも該第2の長手方向軸が該第1の長手方向軸に対して所定の角度で配置される第2の位置まで移動可能である関節ツールアセンブリと、
該本体部分と機械的に協動するプッシャーと、該関節ツールアセンブリと機械的に協動するピボットとを含むロックアセンブリであって、該プッシャーが該ピボットのピボット嵌合面と嵌合するような寸法のプッシャー嵌合面を有し、該プッシャーは、該ピボットに向かって遠位側に付勢され、該関節ツールアセンブリが該第2の位置に移動されるとき近位側に押される、ロックアセンブリと
を備えた、外科用器具。
【0012】
(項目2)
前記プッシャー嵌合面が、その長さの大部分に沿って実質的に平坦である、項目1に記載の外科用器具。
【0013】
(項目3)
前記ピボット嵌合面が、その長さの大部分に沿って実質的に平坦である、項目1に記載の外科用器具。
【0014】
(項目4)
前記プッシャー嵌合面が、その長さの大部分に沿って実質的に平坦であり、かつ前記ピボット嵌合面が、その長さの大部分に沿って実質的に平坦である、項目1に記載の外科用器具。
【0015】
(項目5)
少なくとも1つのスプリングが、前記本体部分と機械的に協動し、かつ前記プッシャーを遠位側に付勢する、項目1に記載の外科用器具。
【0016】
(項目6)
前記ロックアセンブリがリンクをさらに含み、該リンクがピボットプレートおよび前記プッシャーと機械的に係合する、項目1に記載の外科用器具。
【0017】
(項目7)
前記リンクが、前記ピボットと旋回可能に係合する、項目6に記載の外科用器具。
【0018】
(項目8)
前記ピボットがシェルフを含み、前記プッシャー嵌合面が前記ピボット嵌合面と接触するとき、該シェルフが該プッシャーの少なくとも一部分と重複する、項目1に記載の外科用器具。
【0019】
(項目9)
前記関節ツールアセンブリが、使い捨て可能な装填ユニットの一部分である、項目1に記載の外科用器具。
【0020】
(項目10)
外科用器具と離脱可能に係合するように構成された使い捨て可能な装填ユニットであって、
第1の長手-方向軸を定義する本体部分と、
該本体部分の遠位端に固定可能であり、第2の長手方向軸を定義する該本体部分の遠位側に配置される関節ツールアセンブリであって、該関節ツールアセンブリは、該第2の長手方向軸が該第1の長手方向軸と実質的に一致する第1の位置から、該第2の長手方向軸が該第1の長手方向軸に対して所定の角度で配置される第2の位置まで移動可能である、関節ツールアセンブリと、
該本体部分と機械的に協動するプッシャーと、該関節ツールアセンブリと機械的に協動するピボットとを含むロックアセンブリであって、該プッシャーが、該ピボットのピボット嵌合面と嵌合するような寸法のプッシャー嵌合面を有し、該プッシャーが該ピボットに向かって遠位側に付勢され、該関節ツールアセンブリが該第2の位置に移動されるとき近位側に押される、使い捨て可能な装填ユニット。
【0021】
(項目11)
前記プッシャー嵌合面が、その長さの大部分に沿って実質的に平坦である、項目10に記載の使い捨て可能な装填ユニット。
【0022】
(項目12)
前記ピボット嵌合面が、その長さの大部分に沿って実質的に平坦である、項目10に記載の使い捨て可能な装填ユニット。
【0023】
(項目13)
前記プッシャー嵌合面が、その長さの大部分に沿って実質的に平坦であり、かつ前記ピボット嵌合面が、その長さの大部分に沿って実質的に平坦である、項目10に記載の使い捨て可能な装填ユニット。
【0024】
(項目14)
前記プッシャーが、少なくとも1つのスプリングによって前記ピボットに向かって遠位側に付勢される、項目10に記載の使い捨て可能な装填ユニット。
【0025】
(項目15)
前記ロックアセンブリがリンクをさらに含み、該リンクがピボットプレートおよび前記プッシャーと機械的に係合する、項目10に記載の使い捨て可能な装填ユニット。
【0026】
(項目16)
前記リンクが、前記ピボットと旋回可能に係合する、項目15に記載の使い捨て可能な装填ユニット。
【0027】
(項目17)
前記ピボットがシェルフを含み、前記プッシャー嵌合面が前記ピボット嵌合面と接触するとき、該シェルフが該プッシャーの少なくとも一部分と重複する、項目10に記載の使い捨て可能な装填ユニット。
【0028】
(摘要)
ハンドル部分、本体部分、関節ツールアセンブリおよびロックアセンブリを含む外科用器具が開示される。この本体部分は、上記ハンドル部分から遠位側に延び、そして第1の長軸-方向軸を定義する。上記関節ツールアセンブリは第2の長手方向軸を定義し、そし
てこの第2の長手-方向軸が上記第1の長手方向軸と実質的に一致する第1の位置から、
上記第2の長手方向軸が上記第1の長手方向軸に対して所定の角度をなす少なくとも第2の位置まで移動可能である。上記ロックアセンブリは、上記本体部分と機械的に協動するプッシャーと、上記関節ツールアセンブリと機械的に協動するピボットとを含む。上記プッシャーは、ピボット嵌合面と嵌合するような寸法のプッシャー嵌合面を含む。このプッシャーは、上記ピボットに向かって遠位側に付勢され、そして上記関節ツールアセンブリが上記第2の位置に移動されるとき近位側に押される。
【図面の簡単な説明】
【0029】
本明細書に開示される外科用器具の種々の実施形態は、本明細書において図面を参照して説明される。
【図1】図1は、関節ツールアセンブリを備えた本明細書に開示される外科用器具の1つの実施形態の遠位端からの側方斜視図である。
【図1A】図1Aは、ツールアセンブリを含む図1に示される外科用器具の使い捨て可能な装填ユニット(DLU)の近位端からの側方斜視図である。
【図2】図2は、図1に示される外科用器具のDLUの、パーツが分離された、取り付けアセンブリとツールアセンブリの遠位端の側方斜視図である。
【図3】図3は、パーツを分離して図1Aに示されるDLUの取り付けアセンブリと近位本体部分の側方斜視図である。
【図3A】図3Aは、図1に示される外科用器具のカップリング部材の側方斜視図である。
【図3B】図3Bは、図1に示される外科用器具のDLUの取り付けアセンブリの上部取り付け部分の側方斜視図である。
【図3C】図3Cは、図1に示される外科用器具のDLUの取り付けアセンブリの下部取り付け部分の側方斜視図である。
【図3D】図3Dは、ツールアセンブリを非関節運動位置にした外科用器具のDLUの取り付けアセンブリおよびツールアセンブリの、近位本体部分の上からの側方斜視図である。
【図3E】図3Eは、ツールアセンブリを関節運動位置にした、図3Dに示される取り付けアセンブリおよびツールアセンブリの、近位本体部分の上からの側方斜視図である。
【図3F】図3Fは、ツールアセンブリを非関節運動位置にした外科用器具のDLUの取り付けアセンブリおよびツールアセンブリの、近位本体部分の下からの側方斜視図である。
【図3G】図3Gは、ツールアセンブリを関節運動位置にした図3Fに示される取り付けアセンブリおよびツールアセンブリの、近位本体部分の下からの側方斜視図である。
【図4】図4は、図1Aに示されるDLUのツールアセンブリの側方断面図である。
【図5】図5は、図3に示される近位本体部分ロック機構のロック部材アクチュエーターの上からの斜視図である。
【図6】図6は、図3に示されるロック機構のロック部材の底からの斜視図である。
【図7】図7は、ロック機構をロック位置にした図1Aに示されるDLU近位本体部分の近位端の平面図である。
【図8】図8は、図7の断面線8−8に沿ってとった断面図である。
【図9】図9は、ロック機構を非ロック位置にした図1Aに示されるDLU近位本体部分の近位端の平面図である。
【図10】図10は、図9の断面線10−10に沿ってとった断面図である。
【図11】図11は、外科用器具へのDLUの取り付けの前の図1に示されるDLUおよび外科用器具の側方斜視図である。
【図12】図12は、外科用器具の遠位端への取り付けの前の図11に示されるDLUの近位端および外科用器具の遠位端の平面図である。
【図13】図13は、DLUが外科用器具の遠位端の中へに直線状に進行させられるときの、図11に示されるDLUの近位端の平面図である。
【図14】図14は、DLUが直線状に進行された後ではあるが、DLUを外科用器具にロックする前の、図12に示されるDLUの近位端および外科用器具の遠位端の平面図である。
【図15】図15は、DLUが直線状に進行させられ、外科用器具上に回転可能にロックされた後の、図13に示されるDLUの近位端および外科用器具の遠位端の平面図である。
【図16】図16は、本開示の実施形態による外科用器具とともに使用するためのロックアセンブリの斜視図である。
【図17】図17は、図16のロックアセンブリの種々の構成要素の斜視図である。
【図18】図18は、関節ツールアセンブリを非関節運動位置にして示される、図16および17のロックアセンブリの一部分の拡大斜視図である。
【図19】図19は、図16〜18の、リンクを含むロックアセンブリの一部分の拡大斜視図である。
【図20】図20は、関節ツールアセンブリを関節運動位置にして示される、図16〜19のロックアセンブリの一部分の拡大斜視図である。
【図21】図21は、本開示の実施形態に従う外科用器具とともに使用するための別のロックアセンブリの一部分の拡大斜視図である。
【図22】図22は、図21のロックアセンブリの拡大された下からの斜視図である。
【図23】図23は、本開示の実施形態に従う複数の層を有する駆動ビームおよび閉鎖装置の斜視図である。
【図24】図24は、パーツが分離された図23の駆動ビームおよび閉鎖装置の斜視図である。
【図25】図25は、図23および24の駆動ビームおよび閉鎖装置の一部分の断面図である。
【図26】図26は、本開示の実施形態に従う駆動ビームおよび閉鎖装置の断面図である。
【図27】図27は、図26の駆動ビームおよび閉鎖装置の断面図である。
【図28】図28は、本開示の実施形態に従うツールアセンブリの斜視図である。
【図29】図29は、図28のツールアセンブリの組み立て図である。
【発明を実施するための形態】
【0030】
本明細書に開示される外科用器具およびDLUの実施形態は、ここで、図面を参照して詳細に説明され、図面では、同様の参照番号は、いくつかの図面の各々で同一または対応する要素を示す。
【0031】
図1を参照して、外科用器具500は、ハンドル部分510、本体部分512、および使い捨て可能な装填ユニット(「DLU」)16を含む。ハンドル部分510は、静止ハンドル514および移動可能なハンドルまたはトリガー516を含む。移動可能なハンドル516は、静止ハンドル514に対して移動可能であり、本体部分512の遠位端から突出する制御ロッド520を進行させる。ハンドル部分510および本体部分512は、米国特許第6,330,965号に開示される様式で構築され得、この特許は、本明細書中にその全体が参考として本明細書によって援用される。あるいは、その他の外科用器具がDLU16とともに用いられ得、内視鏡外科的手順を実施する。
【0032】
図1および1Aを参照して、簡単に述べれば、DLU16は、ツールアセンブリ17、近位本体部分200および取り付けアセンブリ202を含む。本体部分200は、外科用器具500の遠位端(図11)に、以下に詳細に論議される様式で離脱可能に係合するように構成された近位端を有する。取り付けアセンブリ202は、本体部分200の遠位端に旋回可能に固定され、ツールアセンブリ17の近位端に固定して取り付けられる。取り付けアセンブリ202の本体部分200の長手方向軸に垂直である軸の周りの旋回移動は、ツールアセンブリ17の長手方向軸が本体部分200の長手方向軸と一致させられる非関節運動位置と、ツールアセンブリ17の長手方向軸が本体部分200の長手方向軸と所定の角度で配置される関節運動位置との間のツールアセンブリ17の関節運動に影響する。
【0033】
図2〜4を参照して、ツールアセンブリ17は、カートリッジアセンブリ18およびアンビルアセンブリ20を含む。アンビルアセンブリ20は、複数のステープル変形窪み30(図4)を有するアンビル部分28、およびアンビル部分28の上面に固定されるカバープレート32を含む。カバープレート32およびアンビル部分28は、それらの間に駆動アセンブリ212の遠位端(図3)を受容するような寸法である窪み34(図4)を定義する。カバープレート32は、駆動アセンブリ212の遠位端を取り囲み、DLU16の作動の間に組織をつまむことを防ぐ。長軸方向スロット38がアンビル部分28を通って延び、駆動アセンブリ212の保持フランジ40の通過を容易にする。アンビル部分28上に形成されたカム作用面42が、駆動アセンブリ212の保持フランジ40上に支持される一対のカム部材40aと係合するように位置決めされ、アンビルとカートリッジアセンブリとを接近させる。一対の旋回部材44が形成される。一対の安定化部材50が、キャリア48上に形成された個々のショルダー52を係合し、カム作用面42が旋回部材44の周りで旋回されるとき、アンビル部分28が、ステープルカートリッジ54に対して軸方向に滑動することを防ぐ。
【0034】
カートリッジアセンブリ18は、ステープルカートリッジ54を受容するような寸法かつ形態である細長い支持チャネル56を定義するキャリア48を含む。ステープルカートリッジ54および支持チャネル56に沿ってそれぞれ形成された対応するタブ58およびスロット60は、支持チャネル56内の固定された位置でステープルカートリッジ54を保持するために機能する。ステープルカートリッジ54上に形成された一対の支持支柱62が、キャリア48の側壁上に静止するように位置決めされ、支持チャネル56内でステープルカートリッジ54をさらに安定化する。キャリア48は、アンビル部分28の旋回部材44を受容するためのスロット46を有し、そしてアンビル部分28が間隔を置いた位置と接近された位置との間を移動するようにする。
【0035】
ステープルカートリッジ54は、複数のステープルまたはファスナー66を受容するための保持スロット64(図2)、およびプッシャー68を含む。複数の側方に間隔を置いて配置された長手方向スロット70は、ステープルカートリッジ54を通って延び、作動スレッド74の直立するカムウェッジ72を収容する(図2)。中央長軸方向スロット76が、ステープルカートリッジ54の実質的に長さに沿って延び、ナイフブレード78の通過を容易にする(図4)。外科用ステープラー10の作動の間に、駆動アセンブリ212は作動スレッド74に接し、そして作動スレッド74をステープルカートリッジ54の長軸方向スロット70を通って押し、カムウェッジ72をプッシャー68との連続的接触に進める。プッシャー68は、ファスナー保持スロット64内のカムウェッジ72に沿って垂直方向に並進し、ファスナー66を保持スロット64からアンビルアセンブリ20のステープル変形窪み30(図4)中に押す。
【0036】
図3を参照して、取り付けアセンブリ235は、上部取り付け部分236および下部取り付け部分238を含む。中心に配置された旋回部材284は、上部取り付け部分236から、第1のカップリング部材246中に形成された個々の開口部246aを通って延びる。下部取り付け部分238は、旋回部材284を受容するためのボア239を含む(図3Fを参照のこと)。旋回部材284は、-ボア239および第2のカップリング部材2
47の開口部247aを通って延びる。カップリング部材246、247の各々は、上部ハウジリグ半分体250および下部ハウジング半分体252から形成される内部ハンジングの遠位端中に形成される溝290中に受容されるよう構成された相互ロックする近位部分246b、247bを含む。カップリング部材246、247は、取り付けアセンブリ235と、上部ハウジリグ半分体250および下部ハウジング半分体252とを互いに対して長手方向に固定された位置に保持し、その一方、それに対する取り付けアセンブリ235の旋回移動を許容する。
【0037】
図3A〜3Cを参照して、各カップリング部材246、247は、取り付けアセンブリ235と係合するように位置決めされた遠位端246dを有する片持ちスプリングアーム246cを含む。より詳細には、上部取り付け部分236は、個々のカップリング部材246のスプリングアーム246cの遠位端246dを受容するような寸法である窪み236bを含む上面236aを含む。下部取り付け部分238は、個々のカップリング部材247のスプリングアーム247cを受容するような寸法である窪み238cを定義する一対の高くなった面238bを有する底面238aを含む。あるいは、少なくとも1つの窪みがツールアセンブリ17の近位端に形成され得る。
【0038】
図3D〜3Gに示されるように、カップリング部材246、247のスプリングアーム246c、247cの遠位端が、上部取り付け部分236および下部取り付け部分238の窪み236bおよび238cにそれぞれ位置決めされるとき、スプリングアーム246c、247cは、取り付けアセンブリ235を非関節運動位置に保持する。スプリングアーム246c、247cは、取り付けアセンブリ235を、スプリングアーム246cを窪み236bおよび238cから曲げるのに十分な所定の力が付与されて、取り付けアセンブリ235およびツールアセンブリ17の関節運動を行うまで、その非関節運動位置に保持する。所定の力が取り付けアセンブリ235およびツールアセンブリ17に付与されるとき、スプリングアーム246c、247cは、図3Eおよらび3Gに示されるように窪み236bおよび238cから外方に跳ねるか、または曲がり、取り付けアンセンブリ235(そして、それ故、ツールアセンブリ17)の、DLU16の近位本体部分200の遠位端に対する旋回移動を許容する。
【0039】
上記で論議されたように、スプリングアーム246cならびに窪み236bおよび238cは、ツールアセンブリ17を、所定の力が取り付けアンセブリ235に付与されて、スプリングアーム246c、247cの取り付けアセンブリ235の窪み236bおよび238cとの係合を解くまで、その非関節運動位置に維持する。これらのスプリングアーム/窪みは、ステープラー、把持器(図3Hを参照のこと)、電力シールデバイス、例えば、RFシールデバイスなどを含む任意の関節外科用デバイス中に組み込まれ得ることが想定される。さらに、2つのスプリングアーム/窪みが示されるけれども、単一のスプリングアームが提供され得る。さらに、上記関節ツールアセンブリは、DLUのパーツを形成する必要はなく、むしろ、外科用器具の遠位端上に直接支持され得る。例えば、取り付けアセンブリは、ツールアセンブリに取り外し可能または取り外し不能に固定され得、さらに外科用器具の遠位端に直接固定される。
【0040】
上部ハウジング半分体250および下部ハウジング半分体252は、本体部分200の外側スリーブ251内に含まれる(図3)。本体部分200は、上部ハウジング半分体250上に形成されるボスまたは突出部250aを受容するような寸法の切り抜き251aを含む。切り抜き251a内の突出部250aの位置決めは、本体部分200の外側スリーブ251内で下部ハウジング半分体250および上部ハウジング半分体252の軸方向移動および回転移動を防ぐ。1つの実施形態では、ボス250aは、横方向寸法より大きい軸方向寸法を有する実質的に矩形の形状を有する。より大きな軸方向寸法は、スリーブ251内の上部ハウジング半分体250および下部ハウジング半分体252の回転を防ぐための増加した表面積を提供する。ボス250aの近位部分250bは傾斜している。傾斜した近位部分250bは、上部ハウジング半分体250および下部ハウジング半分体252がスリーブ251内に位置決めされるとき、スリーブ251がボス250a上を滑動することを可能にする。ボス250aは、例えば、円形、矩形、三角形などのその他の形態をとり得、そしてなおその意図される機能を達成することが予想される。さらに、ボス250aは、上部ハウジング半分体250に沿ったいずれの場所にも再位置決めされ得るか、またはそれに代わって、下部ハウジング半分体252上、もしくは各ハウジング半分体250および252上に部分的に位置決めされ得る。
【0041】
上部ハウジング半分体250の近位端または挿入先端部193は、差し込みタイプ様式(図1Aおよび7を参照のこと)で、外科用器具の遠位端に離脱可能に係合するための係合ナブ254を含む。ハウジング半分体250および252は、その中に軸方向駆動アセンブリ212を滑動可能に受容するためのチャネル400を定義する。関節リンク256は、上部ハウジング半分体250と下部ハウジング半分体252との間に形成されたスロット402内に滑動可能に位置決めされるような寸法である。一対のH−ブロックアセンブリ255は、ハウジング部分200の遠位端に隣接し、かつ軸方向駆動アセンブリ212の遠位端に隣接して位置決めされて、外科用ステープル留め装置10の関節運動および発射の間の駆動アセンブリ212の外方への歪みおよび膨らみを防ぐ。各H−ブロックアセンブリ255は、本体部分200に固定して取り付けられた近位端、および取り付けアセンブリ235に固定して取り付けられた遠位端を含む可撓性本体255aを含む(図3)。
【0042】
保持部材288は、軸方向駆動アセンブリ212の係合セクション270上に支持される。保持部材288は、下部ハウジング半分体252中に形成されたスロットまたは窪み252a内に離脱可能に配置される一対のフィンガー288aを含む。作動において、SULU16が外科用器具に取り付けられ、そして軸方向駆動アセンブリ212が外科用器具500の作動部材516に所定の力を付与することによって作動されるとき(図11)、軸方向駆動アセンブリ212は遠位側に進行させられて、駆動アセンブリ212および保持部材288を遠位側に移動させる。保持部材288が遠位側に進行させられるとき、フィンガー288aは窪み252aから押されて、外科用器具が作動されたことの音響および触覚指標を提供する。保持部材288は、所定の軸方向の力が軸方向駆動アセンブリ212に付与されるまで、DLU16内の固定された位置で軸方向駆動アセンブリ212を維持することにより、例えば輸送の間に、DLU16の不注意な部分的作動を防ぐよう設計されている。
【0043】
軸方向駆動アセンブリ212は、遠位仕事ヘッド268および近位係合セクション270を含む細長い駆動ビーム266を含む。1つの実施形態では、駆動ビーム266は、複数のスタックされた材料シートから構成される。係合セクション270は、駆動部材272中に形成された対応する一対の保持スロットを実装して係合する一対の弾性係合フィンガー270aおよび270bを含む。駆動部材272は、DLU16の近位端が外科用器具500の本体部分512と係合されるとき、外科用器具の制御ロッド520(図11)の遠位端を受容するように構成された近位出入口を含む。
【0044】
図5〜10をまた参照して、DLU16はさらに、ロック部材300およびロック部材アクチュエーター302を含むロック機構を含む。ロック部材300(図6)は、DLU16の本体部分200の上部ハウジング半分体250の近位部分中に形成された長手方向または軸方向スロット310(図7)内に回転可能に支持される。ロック部材300は、ロック部材300が駆動アセンブリ212を発射前位置に維持する第1の位置(図7および8)から、駆動アセンブリ212が自由に軸方向に移動する第2の位置(図9および10)まで移動可能である。
【0045】
図6に示されるように、ロック部材300は、本体部分200の上部ハウジング半分体250中に形成される横方向スロット310内に滑動可能に位置決めされる半円筒形本体312を含む。本体312は、半径方向の内方に延びるカム部材314および半径方向に内方に延びるフィンガー316を含む。フィンガー316は、駆動アセンブリ212中に形成されたノッチまたはスロット270c(図3)内に滑動可能に受容される寸法である。駆動アセンブリ212のノッチ270cにおけるフィンガー316の係合は、駆動アセンブリ212が本体部分200内で直線状に移動することを防ぎ、そしてそれ故、DLU16の作動を防ぐ。
【0046】
図3、5および7を参照して、ロック部材アクチュエーター302は、DLU16の本体部分200の上部ハウジング半分体250中に形成された軸方向スロット320(図7)内に滑動可能に位置決めされる。アクチュエーター302は、近位接触部材322、遠位スプリングガイド324、および中央カムスロット326を含む。軸方向スロット320は、横方向スロット310と、ロック部材300のカム部材314がロック部材アクチュエーター302のカムスロット326内に滑動可能に位置決めされるように交差する。付勢部材またはスプリング328(図7)は、アクチュエーター302の遠位面330と軸方向スロット320の遠位端を定義する壁332(図7)との間のスプリングガイド324の周りに配置される。スプリング328は、アクチュエーター302を軸方向スロット320内のその退却位置まで押す。その退却された位置で、接触部材322は、近位本体部分200の挿入先端部193に隣接するDLU16の近位端上に位置決めされて、半径方向の外方に延び、そしてカムスロット326は、カム部材314を、ロック部材300のフィンガー316が駆動アセンブリ212のノッチ270c内に配置されるように位置決めするよう配置される。
【0047】
図11〜15は、DLU16の外科用器具500への取り付けの前およびその間のDLU16および外科用器具500を示す。DLU16の外科用器具500上への取り付けの前に、スプリング328は、アクチュエーター302をその退却位置まで押して、上記で論議されたように、ロック部材300をそのロックされた位置まで移動させる。DLU16の挿入先端部193が外科用器具500の本体部分512(図13)の開放端部522(図11)中に直線状に挿入されるとき、ナブ254が、本体部分512の開放端部522中に形成されたスロット(図示されず)を通って直線状に移動する。ナブ254がスロットを通過するとき、ナブ254から角度をなしてオフセットされる接触部材322の近位端322aは、ナブ254を受容するためのスロットを定義する壁276cに接する。DLU16が本体部分512中にさらに移動するとき、ロック部材アクチュエーター302は、その退却位置からその進行位置まで図14中矢印「T」によって示される方向に移動する。アクチュエーター302が、その進行位置に移動するとき、ロック部材300は、駆動アセンブリ212と係合されるそのロック位置(図8)から、その非ロック位置(図10)まで図14中、矢印「U」によって示される方向にカム運動により移動し、フィンガー316をノッチ270cから移動させる。ロック部材300およびロック部材アクチュエーター302を含むロック機構は、DLU16の外科用器具500上への装填の間のように、DLU16の駆動部材の偶発的なまたは不注意による進行または操作を防ぐ。
【0048】
DLU16が、器具500に対して直線状に、本体部分200の近位面530が本体部分512の内面276cに接する位置(図15)まで移動したとき、DLU16は、差し込みタイプ作用で本体部分512に対して回転されることにより、本体部分512の開口部536内にナブ254を位置決めして、DLU16を本体部分512上にロックし得る。差し込みカップリング以外のその他のカップリングタイプが、DLU16を器具500に連結するために用いられ得ることが想定され、例えば、スプリング移動止め、またはスナップ嵌めカップリング、摩擦嵌めカップリング、相互ロック部材、ねじ山カップリングなどがある。
【0049】
図16〜20に示される本開示の実施形態では、外科用器具500および使い捨て可能な装填ユニット16(例えば、図1を参照のこと)とともに使用するためのロックアセンブリ600が示される。示される実施形態では、ロックアセンブリ600は、ハウジング602、プッシャー604、ロッド606、スライド608、少なくとも1つのスプリング610、カムフィンガー612、スロット616を有するピボットプレート614およびリンク618を含む。ロックアセンブリ600は、一般に、外科用器具500の発射の間に、ツールアセンブリ17(例えば、図1を参照のこと)をその位置に維持することを支援する。
【0050】
図16および17を参照して、ロックアセンブリ600の一部分は、ハウジング602内に少なくとも部分的に含まれる。図16は、ハウジング602に関連して配置されたロックアセンブリ600を示し、その一方、図17は、ハウジング602から分離されたロックアセンブリ600を示す。示される図17の実施形態では、プッシャー604は、それから遠位側に延びるロッド606とともに示される。スライド608は、ロッド606から遠位側に延び、そしてそれと滑動可能な関係にあり、それ故、スライド608がロッド606に対して軸方向に移動することを可能にする。スプリング610または一対のスプリング(この実施形態では明瞭に示されていない)は、スライド608をロッド606から遠位側に付勢する。
【0051】
ここで、図18〜20を参照して、カムフィンガー612およびピボットプレート614が示される。カムフィンガー612はスライド608から遠位側に延び、そしてピボットプレート614は、例えば、取り付けアセンブリ235上に配置され得る(図13を参照のこと)。ピボットプレート614は、ツールアセンブリ17上に配置され得るか、またはその一部分に組み込まれ得ることが予想される。複数のスロット616(5つのスロット616が図示される)が、ピボットプレート614上に配置され、そしてその中にカムフィンガー612の少なくとも一部分を受容するようなサイズである。本体部分512(例えば、図1を参照のこと)に対し(実質的な関節運動のないことを含む)、ツールアセンブリ17の異なる量の関節運動に際し、カムフィンガー612は、ピボットプレート614の個々のスロット616とほぼ一致する。図18および19は、中央スロット616a(図19中の視界からは隠されている)と実質的に一致したカムフィンガー612を示し、そして図20は、側方スロット616bと実質的に一致したカムフィンガー612を示す。
【0052】
図17および19に示されるリンク618は、ピボットプレート614とカムフィンガー612とに機械的に係合している。(図18では、リンクは除かれている。)リンク618は、開口部620およびスロット622を有して示される(図19)。開口部620は、ピポットプレート614上のボス624に対して旋回する関係にあり、そしてスロット622は、カムフィンガー612と滑動可能に係合される。この関係は、本体部分512に対するピポットプレート614の関節運動、およびピポットプレート614に対するスライド608の長手方向並進を可能にする。
【0053】
操作において、移動可能ハンドル516の少なくとも部分的な関節運動に際し(例えば、図1を参照のこと)、プッシャー604は、例えば、制御ロッド(例えば、図11を参照のこと)を経由して遠位側に押され、それ故、ピポットプレート614のスロット616中に少なくとも部分的にカムフィンガー612の遠位側並進を引き起こす。カートリッジアセンブリ18およびアンビルアセンブリ20を接近させるために移動可能なハンドル516を作動させることは(例えば、図1Aを参照のこと)また、カムフィンガー612を遠位側に並進させるよう作用することが想定される。このような実施形態では、関節ツールアセンブリ17がその場にあり、そして組織に対してクランプするとき、(例えば、移動可能ハンドル516を解放することなく)さらなる関節運動を達成することはできない。従って、ロックアセンブリ600は、ステープルを例えば組織中に据え付ける前に、関節ツールアセンブリ17を本体部分512に対してその場に維持することを支援する。
【0054】
上記で論議されたように、スプリング610は、スライド608をロッド606から遠位側に付勢する。スプリング610によって提供されるこの付勢は、カムフィンガー612がピポットプレート614のスロット616から偶発的または早まって移動されないことを確実にすることを支援し、これは、それらの間に有意な量の「遊び」を生じ得る。さらに、スプリング610によって提供される遠位側への付勢は、スライド608とピポットプレート614との間に存在する製造許容誤差および/または隙間を削除することを支援する。カムフィンガー612および/またはスロット616の少なくとも一部分は、それらの間の意図されない移動を減少させることを支援するようにくさび型形状であり得ることもまた想定される。このような実施形態では、カムフィンガー612およびスロット616の遠位部分は、対応する近位部分より狭くあり得る。
【0055】
図21および22に示される本開示の実施形態では、外科用器具500および使い捨て可能な装填ユニット16(例えば、図1を参照のこと)とともに使用するためのロックアセンブリ700が示される。示される実施形態では、ロックアセンブリ700は、アダプター702、プッシャー704、ピボット706、付勢要素(例えば、一対のスプリング708)およびリンク710を含む。ロックアセンブリ700は、一般に、ツールアセンブリ17を所定の位置に維持することを支援する。
【0056】
図21を参照して、ロックアセンブリ700のアダプター702は、外科用器具500の本体512(例えば、図1を参照のこと)内、または使い捨て可能な装填ユニット16内にほぼ収容される。図示される実施形態では、プッシャー704は、一対のスプリング708の遠位側に配置される。プッシャー704は、一対のスプリング708を経由して関節ツールアセンブリ17のピボット706に向かって遠位側に付勢される。プッシャー704の遠位部分は、ピボット706の近位部分に隣接して配置されるピボット嵌合面714(図22)と嵌合する形状および寸法のプッシャー嵌合面712(図22)を含む。プッシャー704の一部分と機械的に協動し、そしてピボット706の一部分に旋回可能に連結されたリンク710が示され、それ故、関節ツールアセンブリ17が、本体部分512に対し、その第1の位置とその第2の位置との間を移動することを可能にする。より詳細には、リンク710は、ピボット706の突出部707上に適合する開口部711を含み、それ故、それらの間の旋回移動を可能にする。さらに、リンク710は、アダプター702の一部分と滑動可能に係合され、それ故、それらの間の長手方向の移動を可能にする。
【0057】
ここで、図22を参照して、プッシャー嵌合面712は、この実施形態では、その長さの大部分に沿って実質的に平坦である。同様に、ピボット嵌合面714はまた、図示された実施形態ではその長さの大部分に沿って平坦である。それ故、一対のスプリング708を経由するプッシャー704のピボット706に向かう遠位側付勢(矢印Aの方向)は、
関節アセンブリ17をその第1の非関節運動位置に維持することを支援する。なぜなら、この付勢力は、関節ツールアセンブリ17が旋回に抵抗することを支援するからである。2つのスプリング708が示されるけれども、より多く、またはより少ないスプリング708が提供され得る。
【0058】
関節ツール17をその第1の非関節運動位置から旋回するために、対のスプリング708からの遠位側付勢力が乗り越えられなければならない。このような旋回作用は、プッシャー704を、対のスプリング708の付勢に対して近位方向(矢印Bの方向)に移動させる。プッシャー嵌合面714は、(この実施形態では明瞭に示されていないが)移動止めを含むことにより、関節顎部材17を選択された関節運動位置に安定化することを支援する。
【0059】
図22を続いて参照し、ピボット706は、その上のシェルフ716を含む。図22に示されるように、シェルフ716は、プッシャー嵌合面712がピボット嵌合面714と接触するとき、プッシャー704の少なくとも一部分と重複する。シェルフ716は、関節ツールアセンブリ17が回転され、そして/または関節運動されるとき、プッシャー704とピボット706との間に組織がつままれることを防ぐことを支援するように配置され、かつ構成されている。
【0060】
図23〜25に示される本開示の実施形態では、複数の層750a〜750eを有する複数層の駆動ビーム750が示され、そして使い捨て可能な装填ユニット16(例えば、図1を参照のこと)中に含まれ得る。I−ビームのような閉鎖装置760もまた示される。閉鎖装置760は、図2を参照して上記で詳細に説明されたように、ツールアセンブリ17に接近するためにカム作用面42(またはその他の接触面)中に進行可能である水平部分762を含む。
【0061】
図24を参照して、5つの層750a〜750eを有する複数層の駆動ビーム750が示される。より少ないか、またはより多い層を用いて複数層の駆動ビーム750を形成し得ることが想定され、そして本開示の範囲内である。複数層の駆動ビーム750が、本開示のその他の実施形態における駆動ビーム266を置換し得ることもまた想定される。複数層の駆動ビーム750の使用は、使用の間、特に、例えば、ツールアセンブリ17がその関節運動位置にある間に、増加した強度および可撓性を提供し得る。
【0062】
図23〜25に、複数層の駆動ビーム750の各層を通って延びる複数の切り抜き770が示される。これらの図は、複数層の駆動ビーム750の層あたり、5〜10の間の切り抜きを示しているけれども、切り抜き770の正確な数は、5より少なく、5と10との間、または10より多くあり得る。さらに、駆動ビーム750の隣接する層の切り抜き770は、互いに一致していても良いし、していなくても良い。切り抜き770の使用は、駆動ビーム750の断面寸法を減少し、そして偏向力調節を可能にする。矩形の切り抜き770が示されているけれども、その他の矩形または非矩形形状を有する切り抜き770の使用もまた企図される。
【0063】
複数層の駆動ビーム750の各層750a〜750eの取り付け、および閉鎖装置760への取り付けは、図25に示される。示される実施形態では、外側層(図24の750aまたは750e)は、例えば、一対のスポット溶接により、2つの位置(各位置は、図25で番号780によって示される)で閉鎖装置760に固定される。各外側層750a、750eは、閉鎖装置760から突出するボス778上に適合するアパーチャ776を含むことがまた想定される。各外側層750a、750eはまた、恐らくは、一対のスポット溶接により2つの位置(各位置は、図25で番号781によって示される)で隣接する層(例えば、750bまたは750d)に固定される。さらに、各内側層(例えば、750b、750cおよび750d)は、例えば、スポット溶接を経由して2つの位置で隣接する内側層に付着される(例えば、750bは750cに付着され;750cは750bおよび750dに付着され;そして750dは750cに付着される)。スポット溶接が付着方法として開示されているけれども、各層を互いに、そして外側層を閉鎖装置に付着するためのその他の方法が想定され、これは本開示の範囲内である。示された実施形態は、閉鎖装置760に隣接する内側層の付着点780を示すが、これら付着点780が駆動ビーム750のその他の位置に配置されることが想定され、これは本開示の範囲内である。さらに、駆動ビーム750の少なくとも1つの層が、ステンレス鋼のような金属から作製されることが想定される。駆動ビーム750および/または閉鎖装置760の一部分はまた、以下に説明されるように、プラスチック材料から作製され得るか、またはプラスチック材料で少なくとも部分的に被覆され得る。さらに、閉鎖装置790は、その上の、組織を切断するための切断面(図23)を含み得る。
【0064】
図26および27に示される本開示の実施形態では、閉鎖装置800および駆動ビーム802の一部分が示される。閉鎖装置および/またはツールアセンブリ(例えば、図2を参照のこと)の接触面(例えば、カム作用面42)は、プラスチック面またはプラスチック被覆を含み得る。この実施形態では、閉鎖装置800の水平部分806を少なくとも部分的に被覆する一対のキャップ804を有する閉鎖装置800が示される。キャップ804は、この実施形態ではプラスチックから作製され得る。このような閉鎖装置800および/またはツールアセンブリ17の接触面上に配置されるプラスチック表面は、2つの金属表面に対してそれらの間の摩擦の量を一般に低減する。すなわち、金属に対するプラスチック、またはプラスチックに対するプラスチックの相互作用は、一対の金属表面間の相互作用より少ない摩擦を生成し得る。この減少した摩擦の量は、減少した発射力に対応し得る。
【0065】
一対のキャップ804のような閉鎖装置800の一部分は、プラスチックから作製されるか、プラスチックでオーバーモールドされるか、またはプラスチック被覆を含むことが想定される。さらに、ツールアセンブリ17の接触面、またはその少なくとも一部分がまた、プラスチックから作製されるか、プラスチックでオーバーモールドされるか、またはプラスチック被覆を含み得る。
【0066】
本開示の実施形態では、閉鎖装置800は、図26および27に示されるように、I−形状断面を含み得る。さらに、閉鎖装置800および駆動ビーム802は、使い捨て可能な装填ユニット16の一部、および/または関節運動し得る外科用器具の一部であり得る。さらに、駆動ビーム802は、単一の層または(図26に示されるような)複数の層を含み得、そして少なくとも駆動ビーム802の一部分はプラスチックから作製され得る。なお、さらに、閉鎖装置800は、組織を切断するための、その上の切断面808(図27)を含み得る。
【0067】
図26および27を続いて参照し、プラスチックキャップ804は、閉鎖装置800の強度を増加し得るか、またはキャップ804と閉鎖装置800の水平部分806との間により強力な連結を提供し得る補強セクション810を含み得る。キャップ804が閉鎖装置800に離脱可能に付着され得ることがまた想定される。このような実施形態では、キャップ804は、なんらかの実質的な摩耗または損傷が生じた場合に取り外され、そして置換され得る。
【0068】
図28および29に示される本開示の実施形態では、ツールアセンブリ850が示される。この実施形態のツールアセンブリ850は、チャネル852、第1の取り付け部材860、第2の取り付け部材870、アンビルアセンブリ880、第1の取り付けロッド890および第2の取り付けロッド892を含む。第1の取り付けロッド890および第2の取り付けロッド892は、ツールアセンブリ850の要素が一緒のままであることを促進する強力な連結を提供する。
【0069】
チャネル852はその近位端に隣接する開口部854(2つの開口部が示される)を含み、そして第1の取り付け部材860はそれから延びるボス862を含む(2つのボスが示される)。チャネル852は、ボス862(単数または複数)上に開口部854(単数または複数)を配置することによって第1の取り付け部材に連結可能であり、それ故、それらの間での旋回連結を提供する。この実施形態では明瞭に示されていないけれども、チャネル852は、複数の外科用ファスナーまたはステープルカートリッジを収容し得る。
【0070】
アンビルアセンブリ880は、アンビルカバー882およびアンビル886を含む。アンビル886は、例えば、スナップ嵌め連結を経由して、アンビルカバー882と機械的に係合するために構成されている。アパーチャ884が、アンビルカバー882の一部分を少なくとも部分的に通って延びる。アパーチャ884は、第2の取り付け部材870上に配置された突出部872上に適合するように構成されており、それによって、アンビルアセンブリ880と第2の取り付け部材870との間の連結を提供する。さらに、アンビルカバー882は、この開示の実施形態ではそれを通って少なくとも部分的に延びる少なくとも1つの開口部888を含む。開口部888は、第1の取り付け部材860のボス862上に適合するように構成されている。このような実施形態では、アンビルアセンブリ880は、第1の取り付け部材860および第2の取り付け部材870に対して旋回され得る。
【0071】
第1の取り付け部材860は、それを通って延びる第1の開口部864および第2の開口部866を含む。第2の取り付け部材870はまた、それを通って延びる第1の開口部874および第2の開口部876を含む(図29)。さらに、第1の取り付け部材860および第2の取り付け部材870は、第1の開口部864、874が実質的に一致し、そして第2の開口部866、874が実施的に一致するように機械的に係合している。
【0072】
第1の取り付け部材860を第2の取り付け部材870と(そしてそれ故、チャネル852とアンビルアセンブリ880とを)固定するために、第1の取り付けロッド890、またはその一部分は、第1の開口部864および874を通って挿入される。ツールアセンブリ850の要素をさらに固定するために、第2の取り付けロッド892、またはその一部分が、第2の開口部866および876を通って挿入される。第1の取り付けロッド890および/または第2の取り付けロッド892は、締め付け可能である2部分リベットのようなリベットであることが想定される。
【0073】
本開示の1つの実施形態では、ツールアセンブリ850は、関節運動し得る、使い捨て可能な装填ユニットのパーツである。ツールアセンブリ850の関節運動は、第2の取り付け部材870から延びる突出部874および(図21中のリンク710のような)リンクを経由して、外科用器具の本体部分にツールアセンブリ850を旋回可能に取り付けることにより促進され得る。さらに、上記に記載されたような、ツールアセンブリ850を組み立てる方法が、本開示によって企図される。
【0074】
種々の改変が本明細書に開示される実施形態になされ得ることが理解される。例えば、上記に記載のロックアセンブリは、DLUを含む種々の外科用器具に取り込まれ得、そして直線状のステープラー上の使用に制限されない。さらに、このDLUは、開示されたものとは対照的に、外科用器具の挿入先端部を受容するような形態であり得る。従って、上記の説明は、制限的であるとは解釈されるべきではなく、種々の実施形態の単なる例示である。当業者は、本明細書に添付された特許請求の範囲の範疇および精神の内でその他の改変を想定するものである。
【符号の説明】
【0075】
16 使い捨て可能な装填ユニット
17 ツールアセンブリ
200 近位本体部分
202 取り付けアセンブリ
500 外科用器具
510 ハンドル部分
512 本体部分
514 静止ハンドル
516 トリガー
【特許請求の範囲】
【請求項1】
明細書に記載の発明。
【請求項1】
明細書に記載の発明。
【図1A】


【図3】
【図11】
【図17】
【図18】
【図21】
【図28】
【図1】
【図2】

【図3A】
【図3B】
【図3C】
【図3D】
【図3E】
【図3F】
【図3G】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図12】
【図13】
【図14】
【図15】
【図16】
【図19】
【図20】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図29】
【図3】
【図11】
【図17】
【図18】
【図21】
【図28】
【図1】
【図2】
【図3A】
【図3B】
【図3C】
【図3D】
【図3E】
【図3F】
【図3G】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図12】
【図13】
【図14】
【図15】
【図16】
【図19】
【図20】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図29】
【公開番号】特開2013−39384(P2013−39384A)
【公開日】平成25年2月28日(2013.2.28)
【国際特許分類】
【出願番号】特願2012−212038(P2012−212038)
【出願日】平成24年9月26日(2012.9.26)
【分割の表示】特願2007−259197(P2007−259197)の分割
【原出願日】平成19年10月2日(2007.10.2)
【出願人】(501289751)タイコ ヘルスケア グループ リミテッド パートナーシップ (320)
【Fターム(参考)】
【公開日】平成25年2月28日(2013.2.28)
【国際特許分類】
【出願日】平成24年9月26日(2012.9.26)
【分割の表示】特願2007−259197(P2007−259197)の分割
【原出願日】平成19年10月2日(2007.10.2)
【出願人】(501289751)タイコ ヘルスケア グループ リミテッド パートナーシップ (320)
【Fターム(参考)】
[ Back to top ]