
ロボット、ヒント出力装置、ロボット制御システム、ロボット制御方法、ロボット制御プログラム及び集積回路
従来から、利用者を識別し、利用者毎に異なる行動パターンを取るペットロボットや、ペットロボット自身の行動履歴に基づいて、段階的に行動パターンを変化させ、成長の過程を演出するペットロボットが存在する。 本発明は、メモリカードを所持した利用者と接する際に、メモリカードから、メモリカードの識別情報、利用者に関する情報、利用者がロボットに接した履歴情報など、各種の情報を取得し、取得した情報を反映したする行動をすることで、利用者に、より高い満足感を与えることができるロボットを提供する。
【発明の詳細な説明】
【技術分野】
【0001】
外部機器から取得した情報を反映した行動制御を行うロボットに関する。
【背景技術】
【0002】
近年、周囲の環境やユーザからの指示などによって、自律的に動作するペット型ロボットが開発され、販売されている。これらのペット型ロボットに、より現実のペットに近い動作をさせるために、特許文献1では、行動レベルを、段階的に変化させる技術が開示されている。この技術によると、ペット型ロボットは、自身の行動履歴、外部からの入力履歴に基づいて、行動レベルを段階的に、子供らしい行動から大人らしい行動へと変化させる。
【0003】
また、特許文献2には、対面する人に応じて、行動パターンを変更する技術が開示されている。この技術によると、ペット型ロボットは、予め、複数の使用者と個別に対応する行動計画データを記憶しており、音声や顔の画像といった特徴量によって、利用者を識別し、識別した利用者と対応する行動計画データに従って行動する。
【特許文献1】国際公開WO00/67961号公報
【特許文献2】特開2001−101349号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、利用者に、より高い満足感を与ることができるロボットが要望されている。
【課題を解決するための手段】
【0005】
この要望を受けて、本発明は、利用者とコンタクトを取りつつ、自律的に行動するロボットであって、駆動部と、当該ロボットの複数の行動をそれぞれ定義する複数の制御情報を記憶している記憶手段と、ロボットに行動のヒントを与えるヒント出力装置から、前記複数の行動のうちいずれかを示唆する装置ヒント情報を取得する取得手段と、取得した装置ヒント情報により示唆される行動を定義する制御情報を前記記憶手段から選択する選択手段と、選択された制御情報により定義された行動を当該ロボットがするように、選択された制御情報に基づいて、前記駆動部を駆動制御する駆動制御手段とを備えることを特徴とする。
【発明の効果】
【0006】
この構成によると、本発明のロボットは、前記装置ヒント情報の示唆する行動をする。このため、詳細な指示を受けなくても簡単なヒント情報によって、適切な制御情報を選択し、利用者を満足させる行動をすることができる。
【図面の簡単な説明】
【0007】
【図1】擬似ペットシステム1の構成を示す構成図である。
【図2】メモリカード300aの構成を示すブロック図である。
【図3】メモリカード300bの構成を示すブロック図である。
【図4】カード側履歴ファイル314bの詳細を示す。
【図5】擬似ペット100の構成を示すブロック図である。
【図6】有限確率オートマトンの概要を示す。
【図7】状態遷移表A 151の詳細を示す。
【図8】行動ライブラリ108に記憶されている情報を示す。
【図9】確率調整表A 161の詳細を示す。
【図10】ペット側履歴ファイル119の詳細を示す。
【図11】擬似ペット100の動作を示すフローチャートである。
【図12】擬似ペット100aの履歴管理部106aによる状態遷移表の変更及び履歴ファイルの更新の動作を示すフローチャートである。これは、擬似ペット100aの場合の、図11ステップS113の詳細である。
【図13】履歴管理部106aによるペット履歴表に基づく、遷移確率の変更の動作を示すフローチャートである。図12のステップS131の詳細である。
【図14】履歴管理部106aによるカード側履歴ファイルと種別情報に基づく、遷移確率の変更の動作を示すフローチャートである。図12のステップS136の詳細である。
【図15】履歴管理部106aによるカード側履歴ファイルの更新動作を示すフローチャートである。図12のステップS137の詳細である。
【図16】擬似ペット100bの履歴管理部106aによる状態遷移表の変更及び履歴ファイルの更新の動作を示すフローチャートである。これは、擬似ペット100bの場合の、図11ステップS113の詳細である。
【図17】擬似ペット100bの履歴管理部106aによる状態遷移表の変更及び履歴ファイルの更新の動作を示すフローチャートである。図16から続く。
【図18】履歴管理部106bによるペット側履歴ファイル及び性別情報に基づく遷移確率の変更の動作を示すフローチャートである。これは、図16ステップS226の詳細である。
【図19】履歴管理部106bによる、カードタイプ「1」の場合の終了の判定及びペット側履歴ファイルの更新の動作を示すフローチャートである。これは、図16のステップS228の詳細である。
【図20】履歴管理部106bによる、カード側履歴ファイル及びペット側履歴ファイルに基づく遷移確率の変更の動作を示すフローチャートである。これは、図17ステップS239の詳細である。
【図21】履歴管理部106bによる、カード側履歴ファイル及びペット側履歴ファイルに基づく遷移確率の変更の動作を示すフローチャートである。図20から続く。
【図22】履歴管理部106bによる、カード側履歴ファイル及びユーザ履歴表に基づく遷移確率の変更の動作を示すフローチャートである。これは、図17のステップS243の詳細である。
【図23】履歴管理部106bによる、カード側履歴ファイル及びユーザ履歴表に基づく遷移確率の変更の動作を示すフローチャートである。図22から続く。
【符号の説明】
【0008】
1 擬似ペットシステム
100a 擬似ペット
100b 擬似ペット
100c 擬似ペット
101 通信部
102 認証部
103 アンテナ
104 固有情報記憶部
106 履歴管理部
107 行動制御部
108 行動ライブラリ
109 信号処理部
110 情報記憶部
111 駆動部
112 感知部
113 感情管理部
114 時間計測部
300a メモリカード
300b メモリカード
【発明を実施するための最良の形態】
【0009】
1.実施の形態1
本発明の一例である、実施の形態1の擬似ペットシステム1について以下に説明する。
1.1 擬似ペットシステムの概要
本発明の擬似ペットシステム1は、図1に示すように複数の擬似ペット100a、100b、100cとメモリカード300a、300bから構成される。
【0010】
利用者は、図1に示すようにメモリカード300a又は300bを身につけて、擬似ペットに接する。
メモリカード300a及び300bは、非接触ICカードであり、それぞれ、固有のカードIDを記憶している。メモリカード300bは、さらに、複数のペット履歴表を記憶している。ペット履歴表は、メモリカード300bを所持する利用者と擬似ペットが遊んだ際の履歴を示すものであり、擬似ペットを示すペットIDと、そのときの擬似ペットの「喜び・楽しさ」の感情を示すJoy指数を含む。
【0011】
擬似ペット100a及び100bは犬型のペットロボットであり、擬似ペット100cは、ネコ型のペットロボットである。以下、これらを特に区別する必要がないときは、擬似ペット100a〜100cを総称して、擬似ペット100と呼ぶ。擬似ペット100は、利用者による、なでる、たたく、呼びかけるといった働きかけ、温度、照度といった周囲の状況に応じて自律的に動作する。また、擬似ペット100は、メモリカード300a及び300bからの情報の読み出し、メモリカード300bへの情報の書き込みをすることができる。
【0012】
擬似ペット100a及び100cは、メモリカード300bを所持した利用者と遊ぶ際、メモリカード300bからペット履歴表を読み出し、読み出したペット履歴表に基づいて、行動パターンを変化させる。例えば、自身のペットIDと対応するペット履歴表からJoy指数を読み出し、読み出したJoy指数が大きれば、より親密な行動をする。また、自身のペットIDと対応するペット履歴表がない場合、自身と同種の擬似ペットと遊んだ際の履歴、自身と異種の擬似ペットと遊んでからの経過時間などによって、行動を変更する。
【0013】
擬似ペット100bは、擬似ペット100a及び100cとは異なり、複数のユーザ履歴表を生成し、記憶している。ユーザ履歴表は、メモリカードを所持する利用者と擬似ペット100bが遊んだ際の履歴を示すものであり、メモリカードを示すカードIDと、そのときの擬似ペット100bの感情を示すJoy指数を含む。
擬似ペット100bは、メモリカード300aを所持した利用者と遊ぶ際、自身の記憶しているユーザ履歴表に基づいて行動を変化させる。さらに、メモリカード300bを有する利用者と遊ぶ際、自身の記憶しているユーザ履歴表及びメモリカード300bの記憶しているペット履歴表に基づいて行動を変化させる。例えば、メモリカード300bを示すカードIDと対応するユーザ履歴表に記載されているJoy指数が高いが、自身と異種の擬似ペットと最近遊んだことを示すペット履歴表が存在すると、不機嫌な行動をするように、行動パターンを変更する。
1.2 メモリカード300aの構成
メモリカード300aは読み取り専用の非接触ICカードである。
【0014】
メモリカード300aは、図2に示すように、通信部301a、アンテナ303a、認証部302a、制御部307a及び情報記憶部310aから構成される。以下にメモリカード300aを構成する各部について説明する。
(1)情報記憶部310a
情報記憶部310aは、ROMから構成され図2に示すように、カードタイプ311a、カードID312a、性別情報313aを記憶している。
【0015】
カードタイプ311aは、メモリカードの種類を示すものであり、「1」は読み取り専用であること、「2」は読み出し及び書き込み可能であることを示す。ここで、カードタイプ311a「1」は、メモリカード300aが、読み出し専用であることを示している。
カードID312aは、メモリカード300aに固有の識別情報である。
【0016】
性別情報313aは、メモリカード300aの所有者の属性を示す情報の一つであり、「男」又は「女」の何れかである。ここで、性別情報313aは、メモリカード300aの所有者の性別が「男」であることを示している。
(2)通信部301a及びアンテナ303a
通信部301aは、アンテナ303aを介して外部機器と、制御部307a又は認証部302aとの間で、各種の情報の送受信を行う。
【0017】
(3)認証部302a
認証部302aは、制御部307aの指示により、通信部301aを介して外部機器との間で機器認証を行う。機器認証の方法は、一例としてチャレンジアンドレスポンス方式を用いる。認証方法は、これに限るものではない。
機器認証が成功であれば、認証部302aは、制御部307aと外部機器との通信を許可し、失敗であれば、制御部307aと外部機器との間の通信を禁止する。ここで、外部機器とは、擬似ペット100である。
【0018】
(4)制御部307a
通信部301aを介して、擬似ペット100から、チャレンジデータを受信する。チャレンジデータを受信すると、受信したチャレンジデータを認証部へ出力し、機器認証を指示する。
また、制御部307aは、通信部301aを介して、擬似ペット100から、ID要求を受信する。ID要求を受信すると、制御部307aは、情報記憶部310aからカードタイプ311a、カードID312a及び性別情報313aを読み出し、読み出した性別情報313aを通信部301a及びアンテナ303aを介して、擬似ペット100へ送信する。
1.3 メモリカード300bの構成
メモリカード300bは読み書き可能な非接触ICカードである。
【0019】
メモリカード300bは、図3に示すように、通信部301b、アンテナ303b、認証部302b、制御部307b及び情報記憶部310bから構成される。以下にメモリカード300bを構成する各部について説明する。なお、通信部301b、アンテナ303b、認証部302bについては、メモリカード300aを構成する通信部301a、アンテナ303a及び認証部302aと同様であるので、説明を省略する。
【0020】
(1)情報記憶部310b
情報記憶部310bは、ROM及びフラッシュメモリを含んで構成され、図3に示すように、カードタイプ311b、カードID312b、性別情報313b及びカード側履歴ファイル314bを記憶している。
カードタイプ311b、カードID312b及び性別情報313bは、メモリカード300aの説明において、既に説明した通りである。ここでは、カードタイプ311bは、メモリカード300bが、書き込み及び読み出し可能であることを示す「2」であり、性別情報313bは、メモリカード300bの所有者の性別が「男」であることを示している。
【0021】
カードタイプ311b、カードID312b及び性別情報313bは、情報記憶部310bのROMから構成される部分に記憶されており、メモリカード300bの発売前に予め書き込まれている。
カード側履歴ファイル314bは、図4に示すように、複数のペット履歴表320、330、340・・・から構成される。これらは、情報記憶部310bのフラッシュメモリから構成される部分に記憶されており、メモリカード300bの発売後に擬似ペット100により書き込まれたものである。
【0022】
各ペット履歴表は、メモリカード300bを所持した利用者が擬似ペットと遊んだ際の履歴情報であり、ペットID、種別情報、通信回数、更新日時及びJoy指数から構成される。
ペットIDは、メモリカード300bを所持した利用者が遊んだ擬似ペットと対応する識別情報であり、何れかの擬似ペットの有するペットIDと一致する。種別情報は、ペットIDと対応する擬似ペットの種類を示す。一例として、犬型ロボットであることを示す「犬」、ネコ型ロボットであることを示す「猫」などが種別情報としてペット履歴表に含まれている。通信回数は、ペットIDの示す擬似ペットとメモリカード300aを所持する利用者とが、遊んだ回数を示す。更新日時は、ペットIDの示す擬似ペットとメモリカード300bを所持した利用者とが遊んだ最も新しい時を示す日付と時刻を示している。Joy指数は、その際の、擬似ペットの「喜び・楽しさ」を示す指数であり、数値が大きいほど、擬似ペットの感じる(算出する)楽しさが大きいことを示す。Joy指数については、擬似ペット100の説明において、詳しく説明する。
【0023】
(2)制御部307b
制御部307bは、メモリカード300aの制御部307aと同様に、機器認証の指示、カードタイプ311b、カードID312b及び性別情報313bの送信を行う。
これに加えて、制御部307bは、通信部301bを介して擬似ペット100から、履歴要求及び更新情報を受信する。履歴要求は、カード側履歴ファイルの送信を要求するものであり、更新情報は、ペットID、現在日時、種別情報、通信回数及びJoy指数を含んでいる。
【0024】
履歴要求を受信すると、制御部307bは、情報記憶部310bからカード側履歴ファイル314bを読み出し、読み出したカード側履歴ファイル314bを通信部301bを介して、擬似ペット100へ送信する。
更新情報を受信すると、カード側履歴ファイル314b内で、受信した更新情報に含まれるペットIDを含むペット履歴表を検索する。受信したペットIDを含むペット履歴表を検出すると、検出したペット履歴表の、通信回数と更新日時とJoy指数とを受信した更新情報に含まれる通信回数、現在日時、Joy指数によって更新する。
【0025】
受信したペット更新情報に含まれるペットIDを含むペット履歴表を検出できなければ、制御部307bは、受信した更新情報を基に新たなペット履歴表を生成する。ここで、受信した更新情報に含まれる現在日時をペット履歴表中の更新日時とする。次に、制御部307bは、生成したペット履歴表を、カード側履歴ファイル314bに追加する。
ペット履歴表の更新又は生成が終了すると、制御部307bは、正常にカード側履歴ファイルの更新が終了したことを示す完了通知を、通信部301bを介して擬似ペット100へ送信する。
1.4 擬似ペット100
擬似ペット100は、図5に示すように通信部101、認証部102、固有情報記憶部104、履歴管理部106、行動制御部107、行動ライブラリ108、信号処理部109、駆動部111、感知部112、感情管理部113、時間計測部114及び情報記憶部110から構成される。なお、情報記憶部110は、擬似ペット100bにのみ備えられている。
【0026】
通信部101、認証部102、固有情報記憶部104、行動制御部107、行動ライブラリ108、信号処理部109、駆動部111、感知部112、感情管理部113及び時間計測部114は、擬似ペット100a〜100cにおいて、共通でありその構成及び動作は同一である。履歴管理部106の動作は、擬似ペット100a及び100cと、擬似ペット100bとで異なる。説明の便宜上、擬似ペット100a、100b及び100cの備える履歴管理部106をそれぞれ履歴管理部106a、106b及び106cと表記する。
【0027】
以下に、擬似ペット100a〜100cに、共通する部分について説明し、続いて、擬似ペット100a及び100cと100bとで異なる部分について説明する。
<共通の構成部分>
(1)固有情報記憶部104
固有情報記憶部104は、ROMから構成されペットID116と種別情報117とを記憶している。ペットID116は、擬似ペット100に固有の識別情報であり、種別情報117は、擬似ペット100の種類を示す情報である。例えば、犬型のペットロボットである擬似ペット100a及び100bの場合、種別情報「犬」が記憶されており、ネコ型のペットロボットである擬似ペット100cの場合、種別情報「猫」が記憶されている。
【0028】
(2)通信部101及びアンテナ103
通信部101は、アンテナ103を介して履歴管理部106及び認証部102と、メモリカード300との間で各種の情報を送受信する。(以下の説明において、メモリカード300aと300bとを特に区別する必要がないときは、これらを総称してメモリカード300と表記する。また、この場合、メモリカード300を構成する各部についても、通信部101というように、参照符号の「a」及び「b」を省いて表記する)
(3)認証部102
認証部102は、通信部101を介して、メモリカード300の認証部302と機器認証を行う。機器認証の方法には、チャレンジアンドレスポンス方式を用いる。機器認証の方法は、これに限るものではない。
【0029】
機器認証が成功であれば、認証部102は、履歴管理部106とメモリカード300との通信を許可し、失敗であれば、履歴管理部106とメモリカード300との間の通信を禁止する。
(4)時間計測部114
時間計測部114は、水晶発信機を備え、時間の経過を計測し、現在日時を算出する。
【0030】
(5)信号処理部109、駆動部111及び感知部112
感知部112は、具体的には、擬似ペット100の頭部先端に備えられているCCDカメラ141、距離センサ142、マイク143などを含む。また、頭部ユニット123、胴体ユニット126、脚部ユニット121など、擬似ペット100のボディを構成する各部に備えられた圧力センサ144、温度センサ145を含む。
【0031】
信号処理部109は、感知部112から、圧力データ、音声データなど各種のデータを受け取り、受け取ったデータを行動制御部107及び感情管理部113へ出力する。さらに、頭部ユニット123に備えられた圧力センサ144a(図1に示す)から取得した圧力データを履歴管理部106へ出力する。
また、信号処理部109は、行動制御部107から、駆動部111を構成する各部への動作指示を受け取り、受け取った動作指示を、駆動部111の該当部分へ出力する。
【0032】
駆動部111は、脚動作部131、脚部ユニット121、尻尾動作部132、尻尾ユニット122、頭部動作部133、頭部ユニット123、スピーカ124、点灯制御部135、ランプ125などから構成される。
脚部ユニット121、尻尾ユニット122、頭部ユニット123などは、図1に示すように擬似ペット100のボディを構成しており、脚動作部131、尻尾動作部132、頭部動作部133は、それぞれ、対応するユニット自体を前後左右に動作させたり、回転させたりするアクチュエータを備えている。脚動作部131、尻尾動作部132、頭部動作部133は、信号処理部109から動作指示を受け取り、受け取った動作指示に従って、各ユニットを動作させる。
【0033】
スピーカ124は、信号処理部109からの動作指示に従った音声を生成し、生成した音声を出力する。ここで、スピーカ124は、例えば、甘えた声、怒った声、疲れた声、うなり声など数種類の音声を生成する。
ランプ125は、図1に示す様に、頭部ユニット123の目に当たる部分に内蔵されており、複数のランプを含んで構成される。点灯制御部135は、信号処理部109から動作指示を受け取り、受け取った動作指示に従って、ランプ125を点灯、消灯、点滅させる。ここで、点灯されるランプの色は、擬似ペットの感情を表現しており、例えば、赤は怒り、緑は喜び、青は悲しみを表現し、その感情の強さにより、光の強さや、点滅の周期が変化する。
【0034】
このような、自律動作するペットロボットの動作制御や、各センサから出力されるデータの処理については、特許文献2が詳しい。
(6)感情管理部113
感情管理部113は、喜び、悲しみ、怒り、疲れといった擬似的な感情を、数値化して計数するカウンタを備えている。具体的には、感情管理部113は、喜びや楽しさを示すJoy指数、怒りを示すanger指数、疲れを示すfatigue指数、悲しみを示すsad指数を計数する。
【0035】
また、感情管理部113は、予め、受け取るデータの種類及び数値と、受け取ったデータに応じて加算又は減算する指数の種類と数値とを対応付けて記憶している。
感情管理部113は、信号処理部109を介して感知部112から圧力データ、音声データ、温度データ、照度データなどの各種のデータを受け取り、受け取ったデータにより、各指数を増減させる。例えば、圧力センサから2.0以上の圧力データを受け取った場合、つまりたたかれた場合、sad指数に10加算し、Joy指数から15減じる。温度センサからの温度データが15度未満から15度以上に変化すると、Joy指数に10加算する。
【0036】
また、感情管理部113は、行動制御部107から、信号処理部109へ出力される動作指示を取得し、取得した動作指示によって各指数を増減させる。例えば、怒った声の音声を出力する旨の動作指示を取得すると、anger指数を2減少させる。尻尾ユニットを左右に動作させる旨の動作指示を取得するJoy指数を3増加させる。
擬似的な感情の制御について、ここでは、非常に単純なモデルについて、説明したが、特許文献2には、関数を用いて、より複雑な感情の制御をする方法が説明されており、このような方法を用いても良い。
【0037】
また、ここでは、感情を示す指数は4つのみであるが、驚き、嫌悪といったその他の感情を示す指数や、運動欲、食欲といった生理的感情を示す指数を計数しても良い。
(7)行動ライブラリ108及び行動制御部107
行動制御部107は、有限確率オートマトンと呼ばれるアルゴリズムに基づいて、擬似ペット100の動作を制御する。図6は、この有限確率オートマトンを模式的に示したものである。図7は、有限確率オートマトンに基づく制御を実現するために、行動制御部107が用いる状態遷移表の一例を示している。図6及び図7を用いて、有限確率オートマトンに基づく動作制御について、以下に説明する。
【0038】
図6に示すノードA 211、ノードB 212、ノードC 213・・・は、それぞれ、擬似ペットの状態を示している。例えば、基本姿勢で立っている状態、転倒した状態、座っている状態などである。ノード間を接続する矢印は、ノードからノードへの状態遷移216、217、218・・・を示している。各状態遷移には、予め所定の確率(遷移確率と呼ぶ)が割り当てられており、行動制御部107は、遷移確率に応じて、確率的に遷移先のノードを決定する。図中の(a)、(b)、(c)・・・は、状態遷移に伴う擬似ペット100の動作であり、図7(詳細は後述)中の動作236、237、238・・・と同一である。
【0039】
行動制御部107は、各ノードに対応する状態遷移表を用いて、このような確率的な状態遷移を実現する。図7は、行動制御部107が使用する状態遷移表のうち、ノードA 211に対応する状態遷移表A 151の詳細を示している。ここで、ノードAは、基本姿勢(正面を向いて立っている)の状態と対応している。
図7に示す状態遷移表A 151は、横方向に遷移先231、232、233・・・を配置している。遷移先は、ノードAから状態遷移先となるノードの名称である。各遷移先の下には、ノードAから遷移する際に、擬似ペットが行う動作236、237、238・・・が記載されている。なお、説明の便宜上横方向に列番号A、B、C・・・が、縦方向行番号1、2、3・・・を記載している。
【0040】
縦方向には、状態遷移のトリガとなる外部からの入力イベント243、244・・・が配されている。各入力イベントの隣の列には、入力イベントを特定する具体的なデータのデータ名が配されており、その隣の列には、状態遷移のトリガとなるためのデータの範囲245・・・が配されている。データ名246、247、248・・・は、入力イベントがない場合に、状態遷移のトリガとなる擬似感情の指数の名称が記載されている。これらの入力イベント又は感情指数のうち行番号が小さいものほど優先度が高い。つまり、入力イベント243「音声の検出」と入力イベント244「なでる」とを両方同時に検出した場合、行動制御部107は、入力イベント243「音声の検出」を状態遷移のトリガとして採用する。
【0041】
行番号の付された行と、列番号の付された列の交点の欄には、遷移確率が記載されている。なお遷移確率「0%」の記載は、省略している。図の理解を助けるために、図中の行番号x、列番号yの欄には、(xy)と記載している。以下、この欄をセル(xy)と呼ぶ。
例えば、列番号Aの列の遷移先231「ノードA」の下には、動作236「(a)尻尾を振る」と記載されており、行番号1の行に、入力イベント243「音声の検出」、データ名241「音声」、範囲245「3以上」が記載され、セル(A1)には、遷移確率251「20」が記載されている。これは、レベル「3以上」の音声を検出した場合、「20」%の確率で、「(a)尻尾を振る」という動作を伴って、ノードAに状態遷移することを示している。(ここでは、同一のノードに戻る場合も、状態遷移と呼ぶ)。
【0042】
また、一例として、列番号Cの列には、遷移先233「ノードC」、動作238「(c)甘えた声を出力」と記載されており、行番号6の行には、データ名247「fatigue指数」、範囲250「50以上」と記載されており、セル(C6)には、遷移確率252「30」と記載されている。これは、fatigue指数が「50」以上である場合、「30」%の遷移確率で、「(c)甘えた声を出力」してノードCへ状態遷移することを示している。
【0043】
行動ライブラリ108は、ROM及びRAMを含んで構成され、図8に示すように状態遷移表A 151、状態遷移表B 152・・・状態遷移表Z 154と動作手順a 156、動作手順b 157・・・動作手順z 159、確率調整表A 161、確率調整表B 162、確率調整表C 163、確率調整表D 164を記憶している。
状態遷移表A 151、状態遷移表B 152・・・状態遷移表Z 154は、既に説明した有限確率オートマトンのノードA、ノードB・・・ノードZと、それぞれ対応している。状態遷移表の具体的構成については、図7を用いて説明した通りである。
【0044】
動作手順a 156、動作手順b 157・・・動作手順z 159は、状態遷移の際の擬似ペット100の動作手順を含んでおり、動作手順a 156、動作手順b 157・・・は、図7の動作236「a:尻尾を振る」、動作237「b:方向転換」・・・と、それぞれ、対応している。例えば、動作手順a 156は、尻尾ユニット122を左右に動作させることを示す動作指示を、信号処理部109を介して、尻尾動作部132へ出力する手順を含んでいる。
【0045】
確率調整表A 161〜確率調整表D 164は、擬似ペット100の行動を変化させる際に、履歴管理部106によって用いられるものであり、各状態遷移表の遷移確率の増減量を定義するものである。
一例として、図9は、確率調整表A 161の構成を示している。確率調整表Aは、ノード名271、272、273・・・と、各ノード名と対応する調整量276、277、278・・・とから構成されている。各調整量は、複数の増減量を含んで構成され、各増減量は、ノード名と対応する状態遷移表に含まれる遷移確率に加算又は減算される値である。
【0046】
例えば、ノード名271「ノードA」と対応する調整量276には、増減量281「(C1)+10」、増減量282「(D1)−10」・・・が含まれる。増減量281「(C1)+10」は、「ノードA」と対応する状態遷移表A 151において、セル(C1)の遷移確率に加算する値が「10」であることを示しており、増減量282「(D1)−10」は、セル(D1)の遷移確率から減じる値が「10」であることを示している。
【0047】
確率調整表B162〜確率調整表D164についても、同様の構成である。
確率調整表A 161に基づいて、各状態遷移表の遷移確率を変更した場合、擬似ペット100は、尻尾を振る、甘えた声を出力する、体を摺り寄せるといった好意的な動作を行う確率が高く、怒った声を出力する、噛み付くといった敵対的な動作を行う確率が低くなり、全体的にやや親密な行動をとる。
【0048】
確率調整表B 162に基づいて、各状態遷移表の遷移確率を調整した場合、擬似ペット100は、好意的な動作を行う確率がさらに高くなり、非常に親密な行動をとる。
確率遷移表C 163に基づいて、各状態遷移表の遷移確率を調整した場合、擬似ペット100は、好意的な動作を行う確率が低く、姿勢を低くする、うなり声を出力する、逃げるといった警戒した動作を行う確率が高くなり、全体的に警戒的な行動をとる。
【0049】
確率遷移表D 164に基づいて、各状態遷移表の遷移確率を調整した場合、擬似ペット100は、甘えた声を出力した直後に噛み付く、体を摺り寄せた直後に怒った声を出力するといった、相反する行動を連続して行う確率が高くなり、全体的に親密だが不機嫌な行動をとる。
行動制御部107は、信号処理部109を介して、感知部112から、圧力データ、音声データ、温度データを初めとする各種のデータを取得する。また、定期的に、感情管理部113がカウントしている4つの感情指数を監視する。
【0050】
擬似ペット100の電源がONになると、行動制御部107は、先ず、状態遷移表A 151を読み出す。読み出した状態遷移表A 151と、受け取った各種のデータ及び感情指数に基づいて、次に行う動作と遷移先のノードとを決定する。決定した動作と対応する動作手順に従って、信号処理部109を介して駆動部111へ動作指示を出力し、続いて、遷移先に決定したノードと対応する状態遷移表を読み出す。
【0051】
以下、同様にして、行動ライブラリ108の記憶している状態遷移表A 151、状態遷移表B 152・・・状態遷移表Z 154、動作手順a 156、動作手順b 157・・・動作手順z 159を用いて、擬似ペット100の行動を制御する。
また、履歴管理部106が、確率調整表を用いて、各状態遷移表を構成する遷移確率を増減させて状態遷移表の一部を変更した場合、行動制御部107は、変更後の状態遷移表を用いて、行動制御を続ける。
【0052】
以下の説明において、動作手順a 156〜動作手順z 159により定義される個々の動きを「動作」と呼び、各状態遷移表を用いて実行される擬似ペット100の一連の動作の組み合わせを「行動」と呼ぶ。
<個別の構成部分A>
以下に、擬似ペット100aを構成する履歴管理部106aについて説明する。
(A1)履歴管理部106a
擬似ペット100aを構成する履歴管理部106aは、予め、回数閾値「20」、Joy閾値「80」、無遊戯期間閾値「7日」、種別履歴閾値「50」、猫接触閾値「24時間」を記憶している。これらの情報は、メモリカード300を所持した利用者に対して、非常に親密な行動、やや親密な行動、通常の行動、警戒した行動、非常に親密だが不機嫌な行動、通常の行動のうち、いずれの行動を取るかを決定する基準値となる値である。ここで、通常の行動とは、初期状態の状態遷移表を用いて、行動制御する場合に擬似ペット100のとる行動を指す。
【0053】
また、送信間隔「15秒」を記憶している。送信間隔は、読み書き可能なメモリカード300bへ、更新情報(後述する)を送信する時間間隔である。さらに、履歴管理部106は時間の経過を計測するカウンタtを備えている。
履歴管理部106aは、信号処理部109を介して、頭部ユニット123に備えられた圧力センサ144aからの圧力データを取得する。圧力データを取得すると、履歴管理部106aは、認証部102へ、メモリカード300との間の機器認証を指示する。認証部102による機器認証が失敗であれば、以下の処理を中止する。
【0054】
認証部102による機器認証が成功であれば、履歴管理部106aは、通信部101を介してメモリカード300へ、カードIDの送信を要求するID要求を送信する。次に、通信部101を介して、カードタイプとカードIDと性別情報とを受信する。受信したカードタイプが読み出し専用カードであることを示す「1」であると、履歴管理部106aは、何もしない。
【0055】
受信したカードタイプが、読み書き可能であることを示す「2」であると、履歴管理部106aは、メモリカード300へ、メモリカード300の記憶している履歴情報の送信を要求する履歴要求を送信する。(カードタイプ「2」を記憶しているメモリカードは、メモリカード300bであるので、以下、メモリカード300bと記載する)
次に、履歴管理部106aは、メモリカード300bから、カード側履歴ファイルを受信する。カード側履歴ファイルを受信すると、固有情報記憶部104からペットID116を読み出し、読み出したペットID116を含むペット履歴表を、受信したカード側履歴表内で検索する。読み出したペットID116を含むペット履歴表を検出した場合、検出したペット履歴表から通信回数を読み出し、読み出した通信回数に1加算したものを変数pに代入し、変数pを一時的に記憶する。変数pは、メモリカード300bと擬似ペット100aとの通信回数をカウントするための変数である。次に、履歴管理部106aは、検出したペット履歴表に基づいて状態遷移表の遷移確率を変更する。
【0056】
読み出したペットID116を含むペット履歴表が存在しない場合、履歴管理部106aは、変数pに1を代入し、一時的に記憶する。次に、受信したカード側履歴ファイル及び擬似ペット100a自身の種別情報に基づいて、状態遷移表の遷移確率を変更する。
状態遷移表の遷移確率を変更すると、次に、定期的にメモリカード300へ、更新情報を送信する。
【0057】
以上、概要を述べた
(A1−1)ペット履歴表に基づく遷移確率の変更
(A1−2)カード側履歴ファイル及び種別情報に基づく遷移確率の変更
(A1−3)更新情報の送信
について、詳細に説明する。
(A1−1)ペット履歴表に基づく遷移確率の変更
履歴管理部106aは、検出したペット履歴表から通信回数を読み出す。読み出した通信回数と回数閾値「20」とを比較する。さらに、検出したペット履歴表からJoy指数を読み出し、読み出したJoy指数と、Joy閾値「80」とを比較する。
【0058】
これらの比較の結果、通信回数が「20」以上で、Joy指数が「80」以上であれば、履歴管理部106aは、行動ライブラリ108から確率調整表B162を読み出し、読み出した確率調整表B 162を用いて、状態遷移表A151〜状態遷移表Z154に記載されている遷移確率を増減させる。
比較の結果、通信回数が「20」以上で、Joy指数が「80」未満であれば、行動ライブラリ108から確率調整表A 161を読み出し、読み出した確率調整表A 161を用いて状態遷移表A151〜状態遷移表Z154に記載されている遷移確率を増減させる。
【0059】
比較の結果、通信回数が「20」未満で、joy指数が「80」未満であれば、遷移確率の変更は行わない。
比較の結果、通信回数が「20」未満で、joy指数が「80」以上であれば、検出したペット履歴表から更新日時を読み出す。次に、時間計測部114から現在日時を取得し、取得した現在日時と読み出した更新日時との差を算出する(この差を無遊戯期間と呼ぶ)。無遊戯期間が無遊戯期間閾値「7日」以内であれば、確率調整表A 161を用いて、遷移確率を変更する。
【0060】
無遊戯期間が「7日」を越えていれば、遷移確率の変更は行わない。
(A1−2)カード側履歴ファイル及び種別情報に基づく遷移確率の変更
履歴管理部106aは、受信したカード側履歴ファイルを構成するペット履歴表のうち、擬似ペット100a自身の種別情報「犬」と同一の種別情報を含んでいるものを選択し、選択したペット履歴表に記載されている通信回数の和を算出する(以下、算出した和をD履歴指数と呼ぶ)。
【0061】
次に、履歴管理部106aは、自身の種別情報「犬」とは異なる種別情報「猫」を含むペット履歴表を選択する。選択したペット履歴表に含まれる更新日時のうち最も新しいものを抽出する。(以下、ここで抽出した更新日時を猫接触時と呼ぶ)。
次に、履歴管理部106aは、時間計測部114から現在日時を取得し、取得した現在日時から猫接触時を減算して、経過時間を算出する。算出した経過時間が猫接触閾値「24時間」未満であれば、行動ライブラリ108から、確率調整表C 163を読み出し、読み出した確率調整表C 163を用いて状態遷移表A 151〜状態遷移表Z 154の遷移確率を増減させる。
【0062】
算出した経過時間が「24時間」以上であれば、履歴管理部106aは、次に、算出したD履歴指数と種別履歴閾値「50」とを比較する。算出したD履歴指数が「50」未満であれば、遷移確率の変更を行わない。
算出したD履歴指数が「50」以上であれば、確率調整表A 161を用いて、状態遷移表A 151〜状態遷移表Z 154の遷移確率を増減させる。
(A1−3)更新情報の送信
次に、履歴管理部106aは、カウンタtを「0」に初期化し、時間の計測を開始する。カウンタtが送信間隔「15秒」になると、感情管理部113からJoy指数を取得し、時間計測部114から現在日時を取得し、固有情報記憶部104からペットID116と種別情報117とを読み出す。
【0063】
次に、通信部101を介して、読み出したペットID、種別情報、取得した現在日時、Joy指数、通信回数を送信する。ここで、通信回数は、履歴管理部106aが記憶している変数pである。以下、メモリカード300bに送信するこれらの情報をまとめて、更新情報と呼ぶ。
次に、履歴管理部106aは、更新情報を送信してからの時間を計測する。所定時間内に、正常に更新情報を受信しカード側履歴情報を更新したことを示す完了通知をメモリカード300bから受信すると、カウンタtを「0」に初期化し、同様の処理を繰り返す。
【0064】
所定時間内に、完了通知を受信しなければ、履歴管理部106aは、行動ライブラリ108に記憶されている状態遷移表A〜状態遷移表Zの遷移確率を変更前の状態に戻す。(遷移確率の変更をしていなければ何もしない)
以上、擬似ペット100aを構成する履歴管理部106aについて説明してきたが、擬似ペット100cを構成する履歴管理部106cの構成及び動作は、履歴管理部106aとほぼ同様である。上記の説明において、猫接触閾値「24時間」を、犬接触閾値「24時間」と読み替え、種別情報「犬」と種別情報「猫」とを入れ替えればよいので、履歴管理部106cについての説明は省略する。
<個別の構成部分B>
以下に、擬似ペット100bを構成する情報記憶部110及び履歴管理部106bについて説明する。
【0065】
(B1)情報記憶部110
情報記憶部110は、フラッシュメモリなどの、書き込み及び消去可能な記録媒体から構成され、一例として、図10に示すようなペット側履歴ファイル119を記憶している。ペット側履歴ファイル119は、図10に示すように、複数のユーザ履歴表180、190、200・・・を含む。
【0066】
各ユーザ履歴表は、カードID、性別情報、通信回数、更新日時、Joy指数から構成される。カードIDは、擬似ペット100bと通信したメモリカードを一意に識別する情報であり、メモリカードが記憶しているカードIDと同一である。性別情報は、カードIDの示すメモリカードの所有者の性別であり、メモリカードの記憶している性別情報と一致する。通信回数は、擬似ペット100bがカードIDの示すメモリカードと通信した累積回数である。更新日時は、メモリカードと通信した最も新しい日時を示す。Joy指数は、更新日時の示すときに、メモリカードを有する利用者と遊んだ際に感情管理部113の計数したdoy指数の値である。
【0067】
例えば、ユーザ履歴表180は、カードID181「001A」、性別情報182「男」、通信回数183「10」、更新日時184「2005.3.14.10:30」及びJoy指数186「70」を含む。これは、擬似ペット100がカードID「001A」と性別情報「男」を有するメモリカードと過去に「10」回通信したことがあり、10回の通信のうち、最新の通信は、「2005.3.14.10:30」に行われており、その際の、擬似ペット100bのJoy指数が「70」であったことを示している。
【0068】
(B2)履歴管理部106b
履歴管理部106bは、予め、回数閾値「20」、Joy閾値「80」、無遊戯期間閾値「7日」、種別履歴閾値「50」、猫接触閾値「24時間」及び性別履歴閾値「100」を記憶している。これらの情報は、メモリカード300を所持した利用者に対して、非常に親密な行動、やや親密な行動、通常の行動、警戒した行動、非常に親密だが不機嫌な行動、通常の行動のうち、いずれの行動を取るかを判断する基準値となる値である。
【0069】
また、送信間隔「15秒」と接触間隔「60秒」とを記憶している。送信間隔は、書き込み可能なメモリカード300bへ、更新情報を送信する時間間隔である。接触間隔は、読み出し専用のメモリカード300aを所持した利用者と擬似ペット100bが遊ぶ際に、遊び終わりを判定する基準となる時間である。また、履歴管理部106bは時間の経過を計測するカウンタtを備えている。
【0070】
履歴管理部106bは、信号処理部109を介して、頭部ユニット123に備えられた圧力センサ144aからの圧力データを取得する。圧力データを取得すると、履歴管理部106bは、認証部102へ、メモリカード300との間の機器認証を指示する。認証部102による機器認証が失敗であれば、以下の処理を中止する。
認証部102による機器認証が成功であれば、履歴管理部106bは、通信部101を介してメモリカード300へ、カードIDの送信を要求するID要求を送信する。次に、通信部101を介して、カードタイプとカードIDと性別情報とを受信する。
【0071】
(B2−1)カードタイプ「1」の場合
受信したカードタイプが読み出し専用カードであることを示す「1」の場合、つまり通信相手のメモリカードがメモリカード300aの場合、情報記憶部110の記憶しているペット側履歴ファイル119において、受信したカードIDを含むユーザ履歴表を検索する。
【0072】
受信したカードIDを含むユーザ履歴表が存在しなければ、ペット側履歴ファイル119と受信した性別情報とに基づいて、行動ライブラリ108の状態遷移表A 151〜状態遷移表Z 154の遷移確率を変更する。
受信したカードIDを含むユーザ履歴表を検出すると、履歴管理部106bは、検出したユーザ履歴表に基づいて、行動ライブラリ108の状態遷移表A 151〜状態遷移表Z 154の遷移確率を変更する。
【0073】
遷移確率を変更すると、カウンタtを用いて、メモリカード300aを所持した利用者が擬似ペット100bと遊び終わったか否かを判定し、遊び終わったときに、ペット側履歴ファイル119の内容を更新する。
以下に、
(B2−1−1)ペット側履歴ファイル及び性別情報に基づく遷移確率の変更
(B2−1−2)ユーザ履歴表に基づく遷移確率の変更
(B2−1−3)遊び終わりの判定とペット側履歴ファイルの更新
について、詳細に説明する。
(B2−1−1)ペット側履歴ファイル及び性別情報に基づく遷移確率の変更
履歴管理部106bは、情報記憶部110に記憶されているペット側履歴ファイル119において、受信した性別情報と一致する性別情報を含むユーザ履歴表を選択する。選択したユーザ履歴表に含まれる通信回数の和を算出する。(以下、ここで算出した和を、性別履歴指数と呼ぶ)
次に、履歴管理部106bは、算出した性別履歴指数と性別履歴閾値「100」とを比較する。性別履歴指数が100以上であれば、行動ライブラリ108から、確率調整表A 161を読み出し、読み出した確率調整表A 161を用いて、状態遷移表A 151〜状態遷移表Z 154の制御部に確率を変更する。
【0074】
算出した性別指数が100未満であれば、何もしない。
(B2−1−2)ユーザ履歴表に基づく遷移確率の変更
履歴管理部106bは、検出したユーザ履歴表を用いて、何れの確率調整表を用いて遷移確率を変更するか、又は、遷移確率の変更をするか否かを判定し、判定結果に従って、状態遷移表A〜状態遷移表Zの遷移確率を増減させる。
【0075】
ここでの処理は、既に説明した、擬似ペット100aを構成する履歴管理部106aによる、(A1−1)ペット履歴表に基づく遷移確率の変更とほぼ同一であり、ペット履歴表をユーザ履歴表と読み替えればよいので、簡単な説明にとどめる。
(B2−1−3)遊び終わりの判定とペット側履歴ファイルの更新
上記の手順で、遷移確率を変更すると、履歴管理部106bは、次に、カウンタtを「0」に初期化し、時間の計測を開始する。接触間隔「60秒」以内に、信号処理部109を介して頭部ユニット123に備えられた圧力センサ144aからの圧力データを受け取ると、カウンタtを「0」に初期化する。「60秒」以内に圧力データを受け取らなければ、遊び終えたと判断する。
【0076】
遊び終えたと判断すると、履歴管理部106bは、感情管理部113からJoy指数を取得し、時間計測部114から現在日時を取得する。
メモリカード300aから受信したカードIDを含むユーザ履歴表がペット側履歴ファイル119内に存在しない場合、新たなユーザ履歴表を生成する。ここで、新たなユーザ履歴表のカードID、性別情報には、受信したカードIDと性別情報とを記載する。通信回数には「1」の値を記載する。更新日時には、取得した現在日時を記載し、Joy指数には、取得したJoy指数を記載する。
【0077】
メモリカード300aから受信したカードIDを含むユーザ履歴表をペット側履歴ファイル119内で検出した場合、履歴管理部106bは、検出したユーザ履歴表の更新日時を、取得した現在日時により更新し、Joy指数を、取得したJoy指数により更新する。次に、通信回数に1加算する。
ペット側履歴ファイルを更新し終えると、履歴管理部106bは、カウンタtを停止させ、状態遷移表A 151〜状態遷移表Z 154の遷移確率を初期値に戻す。
【0078】
(B2−2)カードタイプ「2」の場合
受信したカードタイプが、読み書き可能であることを示す「2」の場合、つまり、通信相手のメモリカードがメモリカード300bである場合、履歴管理部106bは、通信部101を介して、メモリカード300bへ、履歴要求を送信する(カードタイプ「2」を記憶しているメモリカードは、メモリカード300bであるので、以下、メモリカード300bと記載する)。次に、履歴管理部106bは、メモリカード300bから、カード側履歴ファイルを受信する。カード側履歴ファイルを受信すると、次に、情報記憶部110の記憶しているペット側履歴ファイル119において、受信したカードIDを含むユーザ履歴表を検索する。
【0079】
受信したカードIDを含むユーザ履歴表が存在しなければ、履歴管理部106bは、変数pに1を代入し、これを一時的に記憶する。変数pは、メモリカード300bと擬似ペット100bとの通信回数をカウントするための変数である。次に、履歴管理部106は、受信したカード側履歴ファイル及び情報記憶部110の記憶しているペット側履歴ファイル119に基づいて、状態遷移表A 151〜状態遷移表Z 154の遷移確率を変更する。
【0080】
受信したカードIDを含むユーザ履歴表を、ペット側履歴ファイル119内で検出した場合、履歴管理部106bは、検出したユーザ履歴表から通信回数を読み出し、読み出した通信回数に1加算したものを変数pに代入し、これを一時的に記憶する。次に、メモリカード300bから、取得したカード側履歴ファイルと検出したユーザ履歴表とに基づいて、状態遷移表A 151〜状態遷移表Z 154の遷移確率を変更する。
【0081】
遷移確率を変更し終えると、定期的に、更新情報を送信する。更新情報の送信に対する応答がなくなると、メモリカード300bを所持した利用者が、擬似ペット100bと遊び終えたと判断し、ペット側履歴ファイルを更新する。
上記の、
(B2−2−1)カード側履歴ファイル及びペット側履歴ファイルに基づく遷移確率の変更
(B2−2−2)カード側履歴ファイルとユーザ履歴表とに基づく遷移確率の変更
(B2−2−3)更新情報の送信
(B2−2−4)ペット側履歴ファイルの更新
について、以下に詳細に説明する。
(B2−2−1)カード側履歴ファイル及びペット側履歴ファイルに基づく遷移確率の変更
履歴管理部106bは、受信したカード側履歴ファイルから、擬似ペット100b自身の種別を示す種別情報「犬」を含むペット履歴表を選択する。選択したペット履歴表に含まれる通信回数を、全て加算してD履歴指数を算出する。
【0082】
続いて、履歴管理部106bは、受信したカード側履歴ファイルから、種別情報「猫」を含むペット履歴表を選択し、選択したペット履歴表に含まれる更新日時のうち最も新しいものを抽出する(以下、猫接触時と呼ぶ)。次に、履歴管理部106bは、時間計測部114から現在時刻を取得し、取得した現在時刻から猫接触時を減じて経過時間を算出する。
【0083】
次に、履歴管理部106bは、情報記憶部110の記憶しているペット側履歴ファイル119内で、受信した性別情報と同一の性別情報を含むユーザ履歴表を選択する。選択したユーザ履歴表に含まれる通信回数を全て加算して性別履歴指数を算出する。
次に、履歴管理部106bは、算出した経過時間と猫接触閾値「24時間」とを比較し、経過時間が「24時間」未満であれば、確率調整表C 163を用いて状態遷移表A〜状態遷移表Zの遷移確率を増減させる。
【0084】
算出した経過時間が「24時間」以上であれば、さらに、算出した性別履歴指数と性別履歴閾値「100」とを比較し、算出したD履歴指数と種別履歴閾値「50」とを比較する。
性別履歴指数が「100」以上であり、かつ、D履歴指数が「50」以上であれば、履歴管理部106bは、確率調整表Bを用いて、状態遷移表A 151〜状態遷移表Z 154の遷移確率を増減させる。
【0085】
性別履歴指数が「100」以上であり、かつ、D履歴指数が「50」未満の場合、又は、性別履歴指数が「100」未満であり、かつ、D履歴指数が「50」以上の場合、履歴管理部106bは、確率調整表Aを用いて、状態遷移表A 151〜状態遷移表Z 154の遷移確率を増減させる。
性別履歴指数が「100」未満であり、かつ、D履歴指数が「50」未満の場合遷移確率の変更は行わない。
(B2−2−2)カード側履歴ファイルとユーザ履歴表とに基づく遷移確率の変更
履歴管理部106bは、受信したカード側履歴ファイルから、種別情報「猫」を含むペット履歴表を選択し、選択したペット履歴表に含まれる更新日時のうち最も新しいものを抽出する(以下、猫接触時と呼ぶ)。次に、履歴管理部106bは、時間計測部114から現在時刻を取得し、取得した現在時刻から猫接触時を減じて経過時間を算出する。
【0086】
次に、ペット側履歴ファイル119内において検出したユーザ履歴表から通信回数を読み出し、読み出した通信回数と回数閾値「20」とを比較する。
通信回数が「20」以上であれば、履歴管理部106bは、次に、検出したユーザ履歴表からJoy指数を読み出し、読み出したJoy指数とJoy閾値「80」とを比較する。読み出したJoy閾値が「80」未満であれば、履歴管理部106bは、確率調整表A 161を用いて、状態遷移表A 151〜状態遷移表Z 154の遷移確率を増減させる。読み出したJoy指数とJoy閾値「80」とを比較する。
【0087】
読み出したJoy閾値が「80」以上であれば、履歴管理部106は、さらに、算出した経過時間と猫接触閾値「24時間」とを比較し、経過時間が「24時間」未満であれば、確率調整表D 164を用いて状態遷移表A〜状態遷移表Zの遷移確率を増減させる。経過時間が「24時間」以上であれば、確率調整表B 162を用いて状態遷移表A〜状態遷移表Zの遷移確率を増減させる。
【0088】
通信回数が「20」未満であれば、履歴管理部106bは、次に、算出した経過時間と猫接触閾値「24時間」とを比較し、経過時間が「24時間」未満であれば、確率調整表C 163を用いて状態遷移表A〜状態遷移表Zの遷移確率を増減させる。
経過時間が「24時間」以上であれば、履歴管理部106bは、検出したユーザ履歴表から更新日時を読み出す。次に、時間計測部114から現在日時を取得し、取得した現在日時から読み出した更新日時を減じて無遊戯期間を算出する。算出した無遊戯期間が無遊戯期間閾値「7日」未満であれば、確率調整表A 161を用いて状態遷移表A〜状態遷移表Zの遷移確率を増減させる。算出した無遊戯期間が無遊戯期間閾値「7日」以上であれば、遷移確率の変更は行わない。
(B2−2−3)更新情報の送信
遷移確率の変更を終えると、履歴管理部106bは、カウンタtを用いて、定期的に更新情報をメモリカード300bへ送信し、送信に対する応答がなくなると遊び終えたと判定する。具体的な処理手順は、擬似ペット100aを構成する履歴管理部106aによる(A1−3)更新情報の送信の手順と同様であるので、ここでは、説明を省略する。
(B2−2−4)ペット側履歴ファイルの更新
遊び終えたと判断すると、履歴管理部106bは、感情管理部113からJoy指数を取得し、時間計測部114から現在日時を取得する。
【0089】
メモリカード300aから受信したカードIDを含むユーザ履歴表がペット側履歴ファイル内に存在しない場合、新たなユーザ履歴表を生成する。ここで、新たなユーザ履歴表のカードID、性別情報には、受信したカードIDと性別情報とを記載する。通信回数には「1」の値を記載する。更新日時には、取得した現在日時を記載し、Joy指数には、取得したJoy指数を記載する。
【0090】
メモリカード300aから受信したカードIDを含むユーザ履歴表がペット側履歴ファイル内に存在する場合、検出したユーザ履歴表の更新日時を、取得した現在日時により更新し、Joy指数を、取得したJoy指数により更新する。次に、通信回数に1加算する。
ペット側履歴ファイルを更新し終えると、履歴管理部106bは、カウンタtを停止させ、状態遷移表A 151〜状態遷移表Z 154の遷移確率を初期値に戻す。
1.5 動作
(1)擬似ペット100の動作
以下に、擬似ペット100の動作について、図11に示すフローチャートを用いて説明する。
【0091】
電源をONにされると(ステップS101)、擬似ペット100の行動制御部107は、行動ライブラリ108に記憶されている状態遷移表A 151〜状態遷移表Z 154を用いて、擬似ペット100の行動制御を継続的に行う(ステップS102)。
一方、履歴管理部106は、頭部ユニット123の備える圧力センサ144aからの圧力データを受け取ると(ステップS106のYES)、認証部102にメモリカード300との機器認証を指示し、認証部102は、メモリカード300との機器認証を開始する(ステップS107)。機器認証が失敗であれば(ステップS108のNO)、ステップS106へ戻り、圧力データを取得するまで待機する。
【0092】
認証部102による機器認証が成功であれば(ステップS108のYES)、履歴管理部106は、通信部101を介して、メモリカード300へID要求を送信する(ステップS109)。
メモリカード300の制御部307は、通信部301を介して擬似ペット100から、ID要求を受信し、情報記憶部310から、カードタイプ、カードID及び性別情報を読み出し(ステップS111)、読み出したカードタイプ、カードID及び性別情報を、通信部301を介して擬似ペット100へ送信する(ステップS112)。
【0093】
擬似ペット100の履歴管理部106は、通信部101を介して、メモリカード300から、カードタイプ、カードID、性別情報を受け取る。次に、メモリカード300及び擬似ペット100自身の記憶している履歴情報ファイルに応じて、状態遷移表の遷移確率を変更し、続いて、メモリカード300、擬似ペット100双方の有する履歴情報ファイルを更新する(ステップS113)。
【0094】
メモリカード300を所持した利用者と遊び終え、履歴情報の更新が完了すると、履歴管理部106は、状態遷移表を初期状態に戻し(ステップS114)、ステップS106へ戻る。だだし、ステップS113において、状態遷移表を変更しない場合は、ステップS114は省略する。
(2)擬似ペット100aの履歴管理部106aによる状態遷移表の変更及び履歴情報の更新
図12は、擬似ペット100aを構成する履歴管理部106aによる、状態遷移表の変更及びメモリカード300bの履歴情報の更新の動作を示すフローチャートである。以下に、図12を用いて、履歴管理部106aによる、状態遷移表の変更及びメモリカード300bの履歴情報の更新について説明する。なお、これは、擬似ペット100aの場合の、図11のステップS113の詳細である。
【0095】
メモリカード300から受信したカードタイプが「1」であれば(ステップS121の「1」)、擬似ペット100aの履歴管理部106aは、何もせずにここでの処理を終了する。
受信したカードタイプが「2」であれば(ステップS121の「2」)、履歴管理部106aは、通信部101を介して、メモリカード300bへ履歴要求を送信する(ステップS122)。
【0096】
メモリカード300bの制御部307bは、通信部301bを介して履歴要求を受信し、情報記憶部310bからカード側履歴ファイル314bを読み出す(ステップS123)。通信部301bを介して、読み出したカード側履歴ファイル314bを、擬似ペット100へ送信する(ステップS124)。
擬似ペット100aの履歴管理部106aは、通信部101を介してメモリカード300bからカード側履歴ファイルを受信する。カード側履歴ファイルを受信すると、固有情報記憶部104に記憶されている擬似ペット100a自身のペットID116を含むペット履歴表を、受信したカード側履歴ファイルにおいて検索する(ステップS126)。該当するペット履歴表を検出すると(ステップS127のYES)、検出したペット履歴表から通信回数を読み出す(ステップS128)。読み出した通信回数に1加算したものを変数pに代入する(ステップS129)。続いて、検出したペット履歴表に基づいて、各状態遷移表の遷移確率を変更する(ステップS131)。
【0097】
ステップS126の検索の結果、該当するペット履歴表が存在しなければ(ステップS127のNO)、履歴管理部106aは、変数pに「1」を代入する。(ステップS134)。次に、受信したカード側履歴ファイルと、擬似ペット100a自身の種別情報「犬」に基づいて、各状態遷移表の遷移確率を変更する(ステップS136)。
次に、履歴管理部106a及びメモリカード300bの制御部307bは、メモリカード300bの記憶しているカード側履歴情報を更新する(ステップS137)。
(3)履歴管理部106aによるペット履歴表に基づく遷移確率の変更
図13は、擬似ペット100aを構成する履歴管理部106aの、ペット履歴表に基づく遷移確率の変更の動作を示したものであり、図12のステップS131の詳細である。以下に、図13を用いて、ペット履歴表に基づく遷移確率の変更動作について説明する。
【0098】
擬似ペット100aの履歴管理部106aは、検出したペット履歴表から通信回数とJoy指数を読み出す(ステップS151)。読み出した通信回数が回数閾値「20」未満であれば(ステップS152の20未満)、次に、読み出したJoy指数と、Joy閾値「80」とを比較する(ステップS152)。Joy指数が「80」未満であれば(ステップS153のNO)、遷移確率の変更は行わない。Joy指数が「80」以上であれば(ステップS153のYES)、検出したペット履歴表から更新日時を読み出す(ステップS154)。次に、履歴管理部106aは、現在日時から更新日時を減算して無遊戯期間を算出する(ステップS156)。算出した無遊戯期間が7日未満であれば(ステップS157のYES)、履歴管理部106aは、確率調整表A 161を用いて、状態遷移表A 151〜状態遷移表Z 154の遷移確率を変更する(ステップS159)。
【0099】
無遊戯期間が7日以上であれば(ステップS157のNO)、履歴管理部106は、遷移確率の変更は行わない。
通信回数が「20」以上であれば(ステップS152の20以上)、履歴管理部106aは、読み出したJoy指数とJoy閾値「80」とを比較し(ステップS161)、「80」未満であれば(ステップS161のNO)、ステップS159へ処理を移す。読み出したJoy指数が、「80」以上であれば(ステップS161のYES)、履歴管理部106aは、確率調整表B 162を用いて状態遷移表A 151〜状態遷移表Z 154の遷移確率を変更する(ステップS162)。
(4)履歴管理部106aによるカード側履歴ファイルと種別情報に基づく遷移確率の変更
図14は、擬似ペット100aを構成する履歴管理部106aによる、カード側履歴ファイル及び擬似ペット100a自身の種別情報「犬」に基づく遷移確率の変更の動作を示したものであり、図12のステップS136の詳細である。以下に、図14を用いて、カード側履歴ファイル及び種別情報「犬」に基づく遷移確率の変更について説明する。
【0100】
履歴管理部106aは、受信したカード側履歴ファイルにおいて、固有情報記憶部104の記憶している擬似ペット100a自身の種別情報「犬」と同一の種別情報を含むペット履歴表を選択する(ステップS171)。選択したペット履歴表に含まれる通信回数を全て加算してD履歴指数を算出する(ステップS172)。
次に、履歴管理部106aは、受信したカード側履歴ファイルにおいて、種別情報「猫」を含むペット履歴表を選択し(ステップS173)、選択したペット履歴表に含まれる更新日時のうち最も新しいものを抽出し、これを猫接触時とする(ステップS176)。時間計測部114から現在時刻を取得し、取得した現在時刻から猫接触時を減算して、経過時間を算出する(ステップS177)。算出した経過時間が猫接触閾値「24時間」未満であれば(ステップS178のNO)、履歴管理部106aは、確率調整表C 163を用いて、状態遷移表A〜状態遷移表Zの遷移確率を変更する(ステップS179)。
【0101】
経過時間が、猫接触閾値「24時間」以上であれば(ステップS178のYES)、次に、履歴管理部106aは、算出したD履歴指数と種別履歴閾値「50」とを比較し(ステップS181)、D履歴指数が「50」未満であれば(ステップS181の50未満)、遷移確率の変更は行わない。
D履歴指数が「50」以上であれば(ステップS181の50以上)、履歴管理部106aは、確率調整表A 161を用いて、各状態遷移表の遷移確率を変更する(ステップS182)。
【0102】
(5)カード側履歴ファイルの更新
以下に、メモリカード300b及び擬似ペット100aによるカード側履歴ファイルの更新の動作について、図15に示すフローチャートを用いて説明する。これは、図12のステップS137の詳細である。
擬似ペット100aの履歴管理部106aは、カウンタtを「0」に初期化し(ステップS191)、時間を計測する(ステップS192)。カウンタtが送信間隔「15秒」に等しくなると(ステップS193のYES)、履歴管理部106aは、感情管理部113からJoy指数を取得し(ステップS194)、時間計測部114から現在日時を取得する(ステップS196)。次に、固有情報記憶部104から、ペットID116と種別情報117とを読み出す(ステップS197)。次に、履歴管理部106aは、通信部101を介して、ペットID116、種別情報117、現在日時、通信回数(=変数p)及びJoy指数から構成される更新情報を擬似ペット100aへ送信する(ステップS198)。
【0103】
メモリカード300bの制御部307bは、通信部301bを介して、擬似ペット100aから更新情報を受信する。制御部307bは、情報記憶部310bに記憶されているカード側履歴ファイル314bにおいて、更新情報含んで受信したペットIDと同一のペットIDを含むペット履歴表を検索する(ステップS201)。該当するペット履歴表が存在しなければ(ステップS202のNO)、受信した更新情報を基に、新たなペット履歴表を生成し、生成したペット履歴表を、カード側履歴ファイル314bに追加する(ステップS203)。
【0104】
該当するペット履歴表を検出すると(ステップS202のYES)、検出したペット履歴表の通信回数、更新日時、及びJoy指数を、受信した更新情報に含まれる通信回数、現在日時及びJoy指数によって更新する(ステップS206)。次に、制御部307bは、通信部301bを介して、正常に更新情報を受信したことを示す完了通知を、擬似ペット100aへ送信する(ステップS207)。
【0105】
擬似ペット100aの履歴管理部106aは、更新情報の送信後の時間の経過を計測し、所定時間内に、メモリカード300bから完了通知を受信すると(ステップS208のYES)、ステップS191へ戻り、ステップS191〜ステップS208の処理を繰り返す。
所定時間内に、完了通知を受信できなければ(ステップS208のNO)、メモリカード300bを所持した利用者が擬似ペット100bと遊び終えたと判断し、カード側履歴ファイルの更新処理を終了する。
【0106】
(6)擬似ペット100bの履歴管理部106bによる状態遷移表の変更及び履歴ファイルの更新
図16及び図17は、擬似ペット100bを構成する履歴管理部106bによる、状態遷移表の変更、メモリカード300b及び擬似ペット100b双方の履歴ファイルの更新の動作を示すフローチャートである。これは、擬似ペット100bの場合の、図11のステップS113の詳細である。
【0107】
以下に、図16及び図17を用いて、履歴管理部106bによる、状態遷移表の変更及び履歴情報ファイルの更新について説明する。
メモリカード300から受信したカードタイプが「1」であれば(ステップS221の「1」)、擬似ペット100bの履歴管理部106bは、情報記憶部110の記憶しているペット側履歴ファイル119内で、受信したカードIDを含むユーザ履歴表を検索する(ステップS222)。該当するユーザ履歴表が存在しなければ(ステップS223のNO)、擬似ペット100bの記憶しているペット側履歴ファイル119及び受信した性別情報に基づいて、各状態遷移表の遷移確率を変更する(ステップS226)。
【0108】
該当するユーザ履歴表を検出した場合(ステップS223のYES)、履歴管理部106bは、検出したユーザ履歴表に基づいて、各状態遷移表の遷移確率を変更する(ステップS227)。なお、ステップS227の動作は、図13を用いて説明した履歴管理部106aによるペット履歴表に基づく遷移確率の変更とほぼ同様であり、擬似ペット100a、履歴管理部106a、ペット履歴表をそれぞれ、擬似ペット100b、履歴管理部106b、ユーザ履歴表と読み替えればよいので、ここでは、説明を省略する。
【0109】
次に、履歴管理部106bは、メモリカード300aを所持した利用者が擬似ペット100bと遊び終えたか否かを判定し、遊び終えたと判断すると、ペット側履歴ファイル119を更新する(ステップS228)。
受信したカードタイプが「2」であれば(ステップS221の「2」)、履歴管理部106bは、通信部101を介して、メモリカード300bへ履歴要求を送信する(ステップS231)。
【0110】
メモリカード300bの制御部307bは、通信部301bを介して、履歴要求を受信し、情報記憶部310bから、カード側履歴ファイル314bを読み出す(ステップS232)。次に、通信部301bを介して、読み出したカード側履歴ファイル314bを、擬似ペット100bへ送信する(ステップS233)。
擬似ペット100bの履歴管理部106bは、通信部101を介して、カード側履歴ファイルを受信する。カード側履歴ファイルを受信すると、履歴管理部106bは、情報記憶部110の記憶しているペット側履歴ファイル119において、受信したカードIDを含むユーザ履歴表を検索する(ステップS236)。
【0111】
該当するユーザ履歴表が存在しなければ(ステップS237のNO)、履歴管理部106bは、変数pに1を代入する(ステップS238)、次に、受信したカード側履歴ファイルと、情報記憶部110の記憶しているペット側履歴ファイル119とに基づいて、各状態船意表の遷移確率を変更する(ステップS239)。
該当するユーザ履歴表を検出した場合(ステップS237のYES)、検出したユーザ履歴表から通信回数を読み出し(ステップS241)、読み出した通信回数に1加算したものを変数pに代入する(ステップS242)。
【0112】
次に、履歴管理部106bは、受信したカード側履歴ファイルと検出したユーザ履歴表とに基づいて、各状態遷移表の遷移確率を変更する(ステップS243)。
遷移確率の変更を終えると、履歴管理部106bは、定期的にカード側履歴ファイルを更新し(ステップS246)、続いて、ペット側履歴ファイルの更新を行う(ステップS247)。なお、ステップS246の詳細は、図15において説明したカード側履歴ファイルの更新の動作とほぼ同様であり、図15中の擬似ペット100a、履歴管理部106aを、それぞれ、擬似ペット100b、履歴管理部106bと読み替えればよいので、ここでは説明を省略する。
【0113】
また、ステップS247の詳細は、図19(詳細は後述する)のカードタイプ「1」の場合の終了の判定及びペット側履歴ファイルの更新の動作の、ステップS276〜ステップS287と同一であるので、ここでは説明を省略する。
(7)履歴管理部106bによるペット履歴ファイルと性別情報に基づく遷移確率の変更
図18は、履歴管理部106bの、ペット履歴ファイルと性別情報に基づいた遷移確率の変更の処理を示している。以下に、図18に示すフローチャートを用いて、ペット側履歴ファイルと性別情報とに基づく遷移確率の変更の動作について説明する。
【0114】
擬似ペット100bの履歴管理部106bは、情報記憶部110の記憶しているペット側履歴ファイル119において、受信した性別情報「男」を含むユーザ履歴表を選択する(ステップS261)。次に、選択したユーザ履歴表に含まれる通信回数を全て加算し、性別履歴指数を算出する(ステップS262)。
算出した性別履歴指数が、性別履歴閾値「100」以上であれば(ステップS263の100以上)、履歴管理部106bは、行動ライブラリ108から確率調整表Aを読み出し、読み出した確率調整表Aを用いて、状態遷移表A〜状態遷移表Zの遷移確率を変更する(ステップS264)。
【0115】
算出した性別履歴指数が、「100」未満であれば(ステップS263の100未満)、遷移確率の変更は行わない。
(8)カードタイプ「1」の場合の終了の判定及びペット側履歴ファイルの更新
図19は、擬似ペット100bが、カードタイプ「1」のメモリカード300aを所持した利用者と遊ぶ場合の、遊び終わりの判断と、遊び終えた時のペット側履歴ファイル119の更新の動作を示している。以下に、図19のフローチャートを用いて、擬似ペット100bの履歴管理部106bによる、終了の判定及びペット側履歴情報の更新の動作について説明する。なお、これは、図16ステップS228の詳細である。
【0116】
履歴管理部106bは、カウンタtを「0」に初期化して(ステップS271)、時間の計測を開始する(ステップS272)。ここで、頭部ユニット123に備えられた圧力センサ144aを介して、利用者の頭部ユニット123への接触を検出すると(ステップS273のYES)、ステップS271へ戻る。
ここで、頭部ユニット123への利用者の接触を検出しなければ、履歴管理部106bは、カウンタtと接触間隔「60秒」とを比較し、カウンタtが「60秒」未満であれば(ステップS274のNO)、ステップS272へ戻り時間の計測を続ける。
【0117】
カウンタtが「60秒」以上であれば、履歴管理部106bは、感情管理部113から、Joy指数を取得し(ステップS276)、時間計測部114から現在日時を取得する(ステップS277)。
受信したカードIDを含むユーザ履歴表が存在する場合は(ステップS284のYES)、現在日時及び取得したJoy指数によって、検出したユーザ履歴表の更新日時Joy指数とを更新する(ステップS284)。続いて、検出したユーザ履歴表の通信回数に1加算する(ステップS286)。
【0118】
受信したカードIDを含むユーザ履歴表が存在しない場合、新たなユーザ履歴表を生成する(ステップS281)。ここで、新たに生成するユーザ履歴表は、受信したカードIDと性別情報、取得したJoy指数と現在日時(更新日時)と、通信回数「1」を含む。次に、生成したユーザ履歴表を情報記憶部110のペット側履歴ファイルに追加する(ステップS282)。
【0119】
次に、履歴管理部106bは、カウンタtを停止させる(ステップS287)。
(9)カード側履歴情報及びペット側履歴情報に基づく遷移確率の変更
図20、図21は、メモリカード300bから受信したカードIDを含むユーザ履歴表が、擬似ペット100bが記憶しているペット側履歴ファイル119内に存在しない場合に、カード側履歴ファイルとペット側履歴ファイルとを基に、状態遷移表の遷移確率を変更する手順を示している。以下に、図20及び21のフローチャートを用いて、擬似ペット100bの履歴管理部106bによるカード側履歴ファイル及びペット側履歴ファイルに基づく遷移確率の変更の動作について説明する。なお、これは、図17のステップS239の詳細である。
【0120】
履歴管理部106bは、受信したカード側履歴ファイルから、擬似ペット100b自身の記憶している種別情報「犬」を含むペット履歴表を選択する(ステップS301)。選択したペット履歴表に含まれる通信回数を全て加算してD履歴指数を算出する(ステップS302)。
続いて、履歴管理部106bは、受信したカード側履歴ファイルにおいて、種別情報「猫」を含むペット履歴表を選択する(ステップS303)。選択したペット履歴表に含まれる更新日時のうち、最も新しいものを抽出する。これを猫接触時とする(ステップS304)。次に、時間計測部114から現在日時を取得し、取得した現在日時から猫接触時を減算して、経過時間を算出する(ステップS306)。
【0121】
続いて、履歴管理部106bは、情報記憶部110に記憶されているペット側履歴ファイル119において、受信した性別情報「男」を含むユーザ履歴表を選択する(ステップS307)。選択したユーザ履歴表に含まれる通信回数を全て加算して、性別履歴指数を算出する(ステップS308)。
算出した経過時間が、猫接触閾値「24時間」未満であれば(ステップS311のNO)、履歴管理部106bは、確率調整表C 163を用いて、状態遷移表A 151〜状態遷移表Z 154の遷移確率を変更する(ステップS312)。
【0122】
経過時間が「24時間」以上であれば(ステップS311のYES)、次に、履歴管理部106bは、算出した性別履歴指数と性別履歴閾値「100」とを比較する。性別履歴指数が「100」以上であれば、さらに、選出したD履歴指数と種別履歴閾値「50」とを比較する。算出したD履歴指数が「50」以上であれば(ステップS314の50以上)、確率遷移表B 162を用いて、各状態遷移表の遷移確率を変更する(ステップS316)。D履歴指数が、「50」未満であれば(ステップS314の50未満)、確率調整表A 161を用いて、各状態遷移表の遷移確率を変更する(ステップS317)。
【0123】
性別履歴指数が「100」未満であれば(ステップS313の100未満)、続いて、算出したD履歴指数と種別履歴閾値「50」とを比較して、D履歴指数が「50」以上であれば(ステップS319の50以上)、履歴管理部106bは、確率調整表A 161を用いて各状態遷移表の遷移確率を変更する(ステップS317)。算出したD履歴指数が「50」未満であれば(ステップS319の50未満)、履歴管理部106bは、遷移確率の変更は行わない。
【0124】
(10)カード側履歴ファイル及びユーザ履歴表に基づく遷移確率の変更
図22、図23は、ペット側履歴ファイル119内に、メモリカード300bから受信したカードIDを含むユーザ履歴表が存在する場合、カード側履歴ファイルと、受信したカードIDを含むユーザ履歴表とを基にした遷移確率の変更の処理を示している。以下に、図22、図23のフローチャートを用いて、擬似ペット100bの履歴管理部106bによる、カード側履歴ファイルとユーザ履歴表とに基づく遷移確率変更の動作について説明する。なお、これは、図17のステップS243の詳細である。
【0125】
擬似ペット100bの履歴管理部106bは、メモリカード300bから受信したカード側履歴ファイルから、種別情報「猫」を含むペット履歴表を選択する(ステップS331)。選択されたペット履歴表に含まれる更新日時のうち、最も新しいものを抽出する。これを猫接触時とする(ステップS332)。時間計測部114から、現在日時を取得し、取得した現在日時から猫接触時を減じて、経過時間を算出する(ステップS333)。
【0126】
次に、ペット側履歴ファイル119において検出した、受信したカードIDを含むユーザ履歴表から通信回数を読み出す(ステップS334)。読み出した通信回数と回数閾値「20」とを比較し、通信回数が「20」未満であれば(ステップS336の20未満)、続いて、算出した経過時間と猫接触閾値「24時間」とを比較する。経過時間が、「24時間」未満であれば(ステップS341のNO)、履歴管理部106bは、確率調整表C 163を用いて各状態遷移表の遷移確率を変更する(ステップS342)。
【0127】
経過時間が「24時間」以上であれば(ステップS341のYES)、検出したユーザ履歴表から更新日時を読み出す(ステップS343)。時間計測部114から現在日時を取得し、取得した現在日時から読み出した更新日時を減じて、無遊戯期間を算出する(ステップS344)。算出した無遊戯期間と無遊戯期間閾値「7日」とを比較し、無遊戯期間が「7日」より長ければ(ステップS346のNO)、遷移確率の変更は行わない。
【0128】
算出した無遊戯期間が「7日」以内であれば(ステップS346のYES)、履歴管理部106bは、確率調整表A 161を用いて遷移確率を変更する(ステップS347)。
読み出した通信回数が「20」以上であれば(ステップS336の20以上)、履歴管理部106bは、検出したユーザ履歴表からJoy指数を読み出す(ステップS337)。読み出したJoy指数と、Joy閾値「80」とを比較し、読み出したJoy指数が「80」未満であれば(ステップS349のNO)、ステップS347へ処理を移す。
【0129】
Joy指数が、「80」以上であれば(ステップS349のYES)、履歴管理部106bは、続いて、算出した経過時間と猫接触閾値「24時間」とを比較し、経過時間が「24時間」未満であれば(ステップS351のNO)、確率調整表D 164を用いて、核状態遷移表の遷移確率を変更する(ステップS352)。
算出した経過時間が、「24時間」以上であれば(ステップS351のYES)、履歴管理部106bは、確率調整表B 162を用いて、各状態遷移表の遷移確率を変更する(ステップS353)。
1.6 まとめ・効果
以上、説明してきたように、本発明の擬似ペットシステム1に属する擬似ペット100は、メモリカード300を所持した利用者と遊ぶ際に、メモリカード300に記憶されている情報を参照して、どのような行動を取るかを決定する。
【0130】
具体的には、擬似ペット100bは、メモリカード300から取得したカードIDによって、正確にメモリカード300にかかるユーザ履歴表を検出することができる。従来技術と比較すると、高性能な撮像システム、解析システムを備えることなく、簡単かつ正確に、ユーザ履歴表を選択することができる。
また、擬似ペット100は、擬似ペット100自身とメモリカード300を所持した利用者とが過去に遊んだ履歴だけでなく、利用者が、他の擬似ペットと遊んだ履歴、擬似ペット100自身が、他の利用者と遊んだ履歴も参照して、行動パターンを変更する。
【0131】
この結果、擬似ペット100aは、メモリカード300bの記憶しているカード側履歴ファイルに、擬似ペット100a自身と対応する履歴表が存在しない場合、メモリカード300bの所有者が、他の擬似ペットと遊んだペット履歴表を基に、例えば、擬似ペット100aとは、種類の異なるネコ型の擬似ペットとつい先ほどまで、遊んでいた場合には、警戒的な態度を取る。これは、猫の臭いが付着したままでは、なかなか犬がなついてくれない状態を、再現している。また、自身と同種類の犬型の擬似ペットと、何度も遊んだ事のある利用者には、初対面であっても、親密な態度をとる。これは、初対面であっても、犬の扱い方に慣れている人には、犬が容易になつく状態を再現している。
【0132】
擬似ペット100bは、メモリカード300aと対応するユーザ履歴表が存在しない場合、他のメモリカードを有した利用者と遊んだ際のユーザ履歴表を基に、例えば、メモリカード300aに記録されている性別情報「男」と同一の性別情報を有するメモリカードを所持した利用者と何度も遊んだことがあれば、初対面であっても、利用者に対して親密な行動を取る。これは、男性に接する機会の多い犬は、男性になつきやすく、女性に接する機会の多い犬は、女性になつきやすいことを再現している。
【0133】
さらに、擬似ペット100bは、自身の記憶しているペット側履歴ファイルとメモリカード300bの記憶しているカード側履歴ファイルとを用いて、過去に何度も遊んだ人で、かつ、その時に楽しいと感じていた人であっても、ネコ型の擬似ペットと遊んだ直後には、親密だが不機嫌な行動をとる。つまり、これは、普段良くなついている飼い犬であっても、他の動物と接触し、その動物の臭いなどが残っている状態では、わざとすねた態度をして、やきもちを焼いていることを再現している。
【0134】
このように、本発明の擬似ペット100は、今現在、遊んでいる擬似ペットと利用者間の履歴情報だけでなく、利用者のほかの擬似ペットとの接触履歴や、擬似ペットの他の利用者との接触履歴を用いることで、より現実に近いペットの行動を再現することができので、より高い満足感、親近感を利用者に与えることができる。
2.変形例
以上、実施の形態1に基づいて説明してきたが、本発明について、本発明はこれに限定されるものではなく、以下のような場合も含む。
【0135】
(1)実施の形態1では、行動ライブラリ108は、4個の確率調整表を記憶しており、履歴管理部106は、これらのうち何れかを用いて、状態遷移表A 151〜状態遷移表Z 154の遷移確率を変更するが、確率調整表に替えて、確率調整表Aを用いて、各状態遷移表の遷移確率を変更して生成された状態遷移表Aa〜状態遷移表Za、確率調整表Bを用いて、遷移確率を増減して生成された状態遷移表Ab〜状態遷移表Zb、確率調整表Cを用いて、各状態遷移表の遷移確率を増減して生成された状態遷移表Ac〜状態遷移表Zc、確率調整表Dを用いて、各状態遷移表の遷移確率を増減して生成された状態遷移表Ad〜状態遷移表Zdを記憶していてもよい。
【0136】
履歴管理部106は、実施の形態1において、確率調整表Aを用いて、状態遷移表A〜状態遷移表Zの遷移確率を変更する代わりに、行動制御部107へ、使用する状態遷移表を状態遷移表Aa〜状態遷移表Zaに変更することを指示する。
確率調整表B〜確率調整表Dを用いて各状態遷移表を変更する場合においても、同様に、状態遷移表の変更を指示する。
【0137】
このようにすることで、メモリカードと通信をするたびに、各状態遷移表の遷移確率を計算する必要がなくなり、迅速に、擬似ペット100の行動を、メモリカードを保持する利用者に対応したものに変更することができる。
(2)メモリカード300から受信したカードIDと対応するユーザ履歴表が存在しない場合、擬似ペット100bの履歴管理部106bは、情報記憶部110に記憶されているペット側履歴ファイルと、受信した性別情報とに基づいて、確率調整表を選択しているが、受信したカードIDと対応するユーザ履歴表の有無に関わらず、単に受信した性別情報によって、いずれかの確率調整表を選択してもよい。
【0138】
また、行動ライブラリ108は、性別情報と一意に対応する確率調整表を記憶しており、受信したカードIDと対応するユーザ履歴表が存在しない場合、履歴管理部106bは、受信した性別情報と対応する確率調整表を用いて、遷移確率を変更する。
例えば、性別情報「女」と対応する確率調整表Eと、性別情報「男」と対応する確率調整表Fを記憶しており、確率調整表Eを用いて、遷移確率を変更すると、擬似ペット100bは、「体を摺り寄せる」、「甘えた声を出す」、「ゆっくり歩く」といった動作をする確率が高くなり、「大きな声で鳴く」、「ジャンプする」といった激しい動作をする確率が低くなり、全体として、穏やかな行動をとる。確率調整表Fを用いて、遷移確率を変更すると、「すばやく走る」、「高くジャンプする」といった動作をする確率が高くなり、全体として、活発な動作をとる。
【0139】
さらに、カードIDと1対1に対応する確率調整表を保持しており、受信したカードIDのみにより、確率調整表を選択するとしても良い。この場合、行動ライブラリ108は、カードID及び確率調整表を対応付けて記憶している。また、各確率調整表が、その先頭部分に対応するカードIDを含んでいても良い。
(3)メモリカード300は、メモリカード300の所有者の性別を示す性別情報を記憶しているが、これにかぎらず、年齢、世代、国籍といった、利用者の属性情報を記憶していても良い。また、姓、利用者の個人的好みを示す情報(大人しいペットを好む、活発なペットを好む)を含んでいても良い。
【0140】
さらに、変形例(2)のように、擬似ペット100は、それぞれの属性情報に応じた確率調整表を記憶していても良い。
(4)擬似ペット100aにおいて、受信したカード側履歴ファイルに、擬似ペット100a自身のペットIDを含むペット履歴表が存在する場合、履歴管理部106aは、自身のペットIDと対応するペット履歴表のみを用いて、確率調整表を選択しているが、その他のペット履歴表を用いるようにしてもよい。
【0141】
例えば、擬似ペット100bの履歴管理部106bと同様にして、猫接触時を算出し、何度も遊んだことがあり、仲の良い利用者であっても、擬似ペット100aとは異なる種類のロボットと遊んだ直後は、不機嫌な行動をとるように制御する。
(5)メモリカード300bは、履歴要求を受信すると、自身の記憶しているカード側履歴ファイルを送信するが、擬似ペット100からペットIDを取得し、取得したペットIDと対応するペット履歴表を送信しても良い。
【0142】
(6)擬似ペット100bの備える情報記憶部110は、着脱可能な記録媒体であってもよい。このようにすれば、例えば、故障や、新しいバージョンの擬似ペットが発売により、擬似ペット本体を買い換えても、メモリカードを新しい擬似ペットに装着することで、新しい擬似ペットは古い擬似ペットと同様の行動をとる。従って、利用者は、新しい擬似ペットに対しても、より愛着を感じることができる。
【0143】
(7)上記の実施の携帯1及び変形例においては、犬型の擬似ペットとネコ型の擬似ペットのみを想定し、種別情報「犬」の擬似ペットと種別情報「猫」の擬似ペットは仲が良くないものとして説明してきた。しかし、擬似ペットの種類は、これらに限るものではなく、他の動物を模したものが存在しても良い。また、同種の擬似ペットにおいても、さらに、ダックスフンド型、チワワ型、アメリカンショートヘア型、シャム猫型など、様々な種類の擬似ペットが存在しても良い。
【0144】
この場合、擬似ペットは、予め、仲の良い種類又は仲の悪い種類を示す種類識別子を記憶しておく。上記の実施の形態では、擬似ペット100a及び100bは、利用者が、自身の種別情報「犬」と同種の種別情報を有する擬似ペットと遊んだ合計回数が50回以上であれば、初対面の人であっても親密な行動をとり、自身の種別情報「犬」と異なる種別情報「猫」を有する擬似ペットと遊んでからの経過時間が24時間未満であると、警戒的な行動をとる。本変形例では、これに替わって、予め記憶している、仲の良い種類識別子を有する擬似ペットと遊んだ合計回数が50回以上であれば、親密な行動を取り、仲の悪い種類識別子を有する擬似ペットと遊んでからの経過時間が24時間未満であれば、警戒的な行動を取る。
【0145】
(8)種別情報に加えてシリーズ番号、バージョン番号を記憶していても良い。シリーズ番号は、擬似ペットが製造された製造メーカおよび、同一のコンセプトの下に製作されたことを識別する番号であり、バージョン番号は、擬似ペットの開発された時期や世代を示すものである。この場合、擬似ペット100は、初対面の人であっても、自身のシリーズ番号と同一のシリーズ番号を有する擬似ペットと遊んだことがある人であれば、親密な行動をとる。さらに、自身のバージョン番号と同一のバージョン番号を有する擬似ペットと遊んだことがある人であれば、非常に親密な行動を取る。
【0146】
(9)本発明の擬似ペット100において、受信したカード側履歴ファイルから算出されるD履歴指数が一定未満である場合、擬似ペット100の機能や取り扱い方法について、利用者に通知しても良い。例えば、赤色のランプを点灯し、「赤いランプが点灯している時は、怒っています」という、説明の音声を再生する。尻尾ユニット122を左右に動作させ、「うれしいことを表現する時は、しっぽを振ります」という、説明の音声を再生する。
【0147】
また、算出したD履歴指数の値に応じて、段階的に、取り扱いや機能の説明を簡略化しても良い。
また、変形例(8)において、説明したように、各擬似ペットがシリーズ番号や、バージョン番号を記憶している場合、カード側履歴ファイルを構成する各ペット履歴表には、種別情報に加えて、シリーズ番号及びバージョン番号が含まれる。
【0148】
この場合、カード側履歴ファイルを構成するペット履歴表のうち、擬似ペット100と同一のシリーズ番号とバージョン番号を含むものが存在しなければ、擬似ペット100の機能及び取り扱い説明を通知する。
シリーズ番号は同じであるが、バージョン番号の異なるペット履歴表が存在する場合、履歴表に含まれるバージョン番号の擬似ペットとの差異点の説明のみを通知する。
【0149】
同一のシリーズ番号とバージョン番号を含むものが存在すれば、説明の通知は行わない。
(10)また、ここまで本発明は擬似ペットであるとして説明してきたが、これに限るものではなく、介護ロボット、工業用ロボットであっても良い。さらに、一般の電気機器であっても良い。
【0150】
機器を操作しようとする利用者の所持するメモリカードから、カード側履歴ファイルを取得し、取得したカード側履歴ファイルをもとに、利用者が、この機器又はこの機器と同種類の機器の操作経験がどの程度あるかを判断し、初心者には、変形例(9)において説明したような、機能及び取り扱いに関する説明を行い、習熟者に対しては、説明を省略する。
【0151】
さらに、操作経験の程度に応じた確率調整表を備えており、利用者の操作経験に応じた動作をするようにしてもよい。介護ロボットや工業用ロボットを例にすると、初心者が使用する場合には、全体として動作速度を遅くする、動作と動作の間に間隔をあける、次に操作すべきボタンやレバーなどを音声通知するというように、初心者向けの行動をする。習熟者が利用する場合には、全体として、動作速度を早くし、迅速に動作するというように、習熟者向けの行動をとる。
【0152】
(11)上記の実施の形態では、擬似ペット100は、4種類の確率調整表を記憶しているが、これに替わって、関数を用いて遷移確率を変更しても良い。
(12)また、上記の実施の形態において説明したペット履歴表、ユーザ履歴表を構成する情報は、一例であり、これに限るものではない。
例えば、利用者と擬似ペット100が遊ぶ際に時間の経過を計測し、計測した時間を累積した累積遊戯時間を含んでいても良いし、Joy指数に替わって、遊び終わりの時点のJoy指数を、累積した累積Joy指数であっても良い。
【0153】
また、カード側履歴ファイル及びペット側履歴ファイルの構成もこれに限ったものではない。例えば、1回の通信の度に、1個の履歴表を生成し、これを蓄積しても良い。
(13)上記の実施の形態では、利用者は、少なくともカードIDの記憶された非接触ICカードを保持して、擬似ペット100と遊ぶが、必ずしも非接触ICカードである必要はない。例えば、接触型のICカードであって、利用者は、擬似ペット100と遊ぶ際に、擬似ペット100にICカードを装着し、遊び終わる時に、装着しているメモリカードを取り外す。メモリカードに限らず、他の記録媒体であっても良い。
【0154】
また、有線で擬似ペット100と接続される記録媒体であっても良いし、携帯電話やPDAなどに装着可能な記録媒体であって、装着母体となる機器の通信機能を利用して、擬似ペット100と通信しても良い。
(14)また、記憶機能と通信機能と電源と簡易なボタン操作部を備えた記録機器であっても良い。この場合、利用者のボタン操作によって、記録機器の側から機器認証を開始する。
【0155】
また、複数の利用者により共有される記録機器であってもよい。この場合、利用者は、記録機器を利用する前に、利用者毎に割り当てられた、ユーザIDを入力する。記録機器は、カードIDに替わって、ユーザIDを擬似ペット100へ送信する。擬似ペット100bの記憶しているユーザ履歴表は、カードIDに替わって、ユーザIDを含んで構成される。また、記録機器が、メモリカード300bのように、履歴情報を書き込み可能である場合、ユーザIDと対応した複数のカード側履歴ファイルを記憶しており、履歴要求を受信すると、入力されたユーザIDと対応するカード側履歴ファイルを送信する。
【0156】
また、ここで通信機能とは、無線通信に限るものではなく、有線で擬似ペット100と接続されていても良い。
(15)実施の形態1において、擬似ペット100bは、頭部ユニットの圧力センサ144aからの入力の間隔が、接触間隔「60秒」以上である場合、メモリカード300aを所持する利用者が擬似ペット100aと遊び終わったと判断している。しかし、これに替わって、通信可能であることを確認する通信確認情報を出力し、これに対する応答をメモリカードから受信できない場合、遊び終わったと判断しても良い。
【0157】
(16)また、本発明において、前記ヒント出力装置は、前記装置ヒント情報として、前記ヒント出力装置に固有の装置識別情報を記憶しており、前記複数の制御情報のうち、少なくともひとつは前記装置識別情報を含み、前記取得手段は、前記ヒント出力装置から前記装置識別情報を取得し、前記選択手段は、前記取得手段によって取得された前記装置識別情報を含む制御情報を選択することを特徴とするロボット。
【0158】
従来技術によると、顔認識や音声認識により、利用者を識別し、識別した利用者に応じて行動パターン選択するペットロボットが、開示されているが、精度の高い識別を行うためには、高性能の撮像システムや解析システムを備える必要がある。本発明の構成では、前記選択手段は、前記装置識別情報と対応する制御情報を選択し、前記ロボットは、前記装置識別情報と対応する行動をする。従って、従来技術と比較すると、本発明では、高性能の撮像システムや解析システムを備えることなく適切な制御情報を選択することができる。
【0159】
(17)前記ヒント出力装置は、前記装置ヒント情報として、前記ヒント出力装置を保持する利用者に関する利用者情報を記憶しており、本発明のロボットにおいて、前記複数の制御情報のうち、少なくともひとつが前記利用者情報を含み、前記取得手段は、前記ヒント出力装置から前記利用者情報を取得し、前記選択手段は、前記取得手段によって取得された前記利用者情報を含む制御情報を選択することを特徴とする。
【0160】
この構成によると、前記複数の制御情報のうち、少なくともひとつが前記利用者情報を含んでいるので、前記選択手段は、前記利用者情報により、迅速かつ正確に、適切な制御情報を選択することができる。
(18)また、前記ヒント出力装置は、前記ヒント出力装置と当該ロボットとの過去のコンタクトを示すコンタクト情報を、前記装置ヒント情報として記憶しており、前記ロボットを構成する前記取得手段は、前記ヒント出力装置から、前記コンタクト情報を取得し、前記選択手段は、取得された前記コンタクト情報に基づいて、制御情報を選択することを特徴とする。
【0161】
この構成によると、本発明のロボットは、前記ヒント出力装置と本発明のロボットが過去にコンタクトを取った際のコンタクト情報を反映した行動をすることができる。
(19)また、本発明のロボットにおいて、前記コンタクト情報は、前記ヒント出力装置が当該ロボットと過去にコンタクトを取ったコンタクト回数であり、前記複数の制御情報は、それぞれ、コンタクト回数の範囲と対応しており、前記取得手段は、前記ヒント出力装置から、前記コンタクト回数を取得し、前記選択手段は、取得した前記コンタクト回数の含まれる範囲と対応する制御情報を選択することを特徴とする。
【0162】
この構成では、前記選択手段は取得した前記コンタクト回数が、各制御情報と対応するコンタクト回数の範囲に含まれるか否かによって、簡単かつ迅速に制御情報を選択することができる。また、本発明のロボットは、コンタクト回数に応じて、適切な行動を選択することができる。
(20)前記コンタクト情報は、前記ヒント出力装置が当該ロボットとコンタクトを取った最も新しい時を示すコンタクト日時であり、前記複数の制御情報は、それぞれ、前記コンタクト日時からの経過時間の範囲と対応しており、本発明のロボットを構成する前記取得手段は、前記ヒント出力装置から、前記コンタクト日時を取得し、前記選択手段は、取得した前記コンタクト日時からの経過時間を算出し、算出した経過時間を含む範囲と対応する制御情報を選択することを特徴とする。
【0163】
この構成によると、前記選択手段は、経過時間に応じて、適切な制御情報を選択するので、前記ロボットは、適切な行動をすることができる。
(21)また、前記コンタクト情報は、前記ヒント出力装置が当該ロボットとコンタクトをとった際に、外的要因及び内的要因により当該ロボットに生じる擬似的な感情を示す感情指数であり、前記ロボットにおいて、前記複数の制御情報は、それぞれ、感情指数の範囲と対応しており、前記取得手段は、前記ヒント出力装置から、前記感情指数を取得し、前記選択手段は、取得した前記感情指数を含む範囲と対応する制御情報を選択することを特徴とする。
【0164】
この構成によると、前記選択手段は、前記感情指数に応じて、適切な制御情報を選択するので、本発明のロボットは、過去に前記ヒント出力装置とコンタクトを取った際に当該ロボットに生じた感情指数を反映した行動をすることができる。
(22)また、前記ロボットは、さらに、前記ヒント出力装置と当該ロボットとのコンタクト中において、当該コンタクトを示す最新コンタクト情報を、前記ヒント出力装置へ定期的に送信する送信手段を備え、前記ヒント出力装置は、前記最新コンタクト情報を受信し、受信した最新コンタクト情報により前記コンタクト情報を更新することを特徴とする。
【0165】
この構成では、前記送信手段は、前記最新コンタクト情報を前記ヒント出力装置に送信し、前記ヒント出力装置は前記最新コンタクト情報により、前記コンタクト情報を更新する。従って、次に、前記ヒント出力装置と前記ロボットとがコンタクトを取る際に、前記ロボットの前記取得手段が、更新された前記コンタクト情報を取得すると仮定すると、今現在の、ロボットと利用者とのコンタクトを次回のコンタクトに反映することができる。
【0166】
(23)また、前記ヒント出力装置は、前記ヒント出力装置と他のロボットとのコンタクトを示すコンタクト情報を、前記装置ヒント情報として記憶しており、前記ロボットを構成する前記取得手段は、前記ヒント出力装置から、前記コンタクト情報を取得し、前記選択手段は、取得した前記コンタクト情報の示す前記他のロボットとの前記コンタクトに応じて、制御情報を選択することを特徴とする。
【0167】
この構成によると、前記選択手段は、前記コンタクト情報により適切な制御情報を選択するため、本発明のロボットは、前記コンタクト情報に応じた適切な行動をすることができる。
(24)前記コンタクト情報は、前記他のロボットの種別を示す他の属性情報を含んでおり、本発明のロボットにおいて、前記選択手段は、予め、当該ロボットの種別を示す属性情報を保持しており、前記取得手段の取得した前記他の属性情報と保持している属性情報とが一致するか否かによって、制御情報を選択することを特徴とする。
【0168】
この構成によると、前記選択手段は、前記ロボットと同じ種別のロボットとコンタクトをとったことがある場合と、ない場合、でそれぞれの場合に応じて、適切な制御情報を選択することができる。
(25)前記ヒント出力装置は、前記ヒント出力装置が過去にコンタクトを取ったコンタクト済みロボットの種別を示す属性情報と、コンタクト回数とを、前記装置ヒント情報として記憶しており、本発明のロボットにおいて、前記記憶手段の記憶している制御情報のうち一つは、当該ロボットの機能及び取り扱い方法を利用者に通知する行動を定義する説明制御情報であり、前記選択手段は、予め、当該ロボットの種別を示す属性情報と、所定の閾値とを記憶しており、取得した前記装置ヒント情報が、当該ロボットと同一の種別のロボットとのコンタクト回数が前記所定の閾値未満であることを示していれば、前記説明制御情報を選択することを特徴とする。
【0169】
この構成では、前記装置ヒント情報が、前記ロボットと同一の種別のロボットとのコンタクト回数が所定の閾値未満であれることを示していれば、前記ロボットは、当該ロボットの機能及び取り扱いを利用者に通知する行動を行う。これにより、本発明のロボットは、前記ヒント出力装置を保持する利用者が、当該ロボットと同種のロボットの取り扱いに慣れていない場合、当該ロボットの機能及び取り扱いを通知し、初心者は、説明書などを用意する必要なく、簡単に、当該ロボットの取り扱い方を知ることができる。また、当該ロボットに不慣れな利用者に対して、予め、取り扱いについて説明することで、誤使用による故障を回避することができる。
【0170】
(26)前記装置ヒント情報は、前記ヒント出力装置に固有の装置識別情報であり、前記ロボットは、さらに、前記ヒント出力装置と当該ロボットとのコンタクトを示すコンタクト情報を、前記装置識別情報と対応して記憶しているコンタクト情報記憶手段を備え、前記選択手段は、前記取得手段の取得した前記装置識別情報と対応する前記コンタクト情報を、前記コンタクト情報記憶手段から読み出し、読み出した前記コンタクト情報によって、制御情報を選択することを特徴とする。
【0171】
この構成では、前記ロボットが、前記ヒント出力装置を保持する利用者と当該ロボットとのコンタクトを示す前記コンタクト情報を記憶しているコンタクト記憶手段を備える。従って、前記ヒント出力装置が読み出し専用の装置であり、新たな情報を書き込むことができないとしても、前記ロボットは、前記コンタクト記憶手段に前記コンタクト情報を記憶させ、前記コンタクト情報を反映した行動をすることができる。
【0172】
(27)前記コンタクト情報記憶手段は、前記ヒント出力装置が当該ロボットと過去にコンタクトを取ったコンタクト回数を、前記コンタクト情報として記憶しており、本発明のロボットにおいて、前記複数の制御情報は、それぞれ、コンタクト回数の範囲と対応しており、前記選択手段は、前記コンタクト情報記憶手段から前記コンタクト回数を読み出し、読み出した前記コンタクト回数を含む範囲と対応する制御情報を選択することを特徴とする。
【0173】
この構成では、前記選択手段は取得した前記コンタクト回数が、各制御情報と対応するコンタクト回数の範囲に含まれるか否かによって、簡単かつ迅速に制御情報を選択することができる。また、本発明のロボットは、前記コンタクト回数応じて、適切な行動をすることができる。
(28)また、本発明のロボットを構成する前記コンタクト情報記憶部手段は、前記ヒント出力装置と当該ロボットとの最新のコンタクト日時を、前記コンタクト情報として記憶しており、前記複数の制御情報は、それぞれ、前記コンタクト日時からの経過時間の範囲と対応しており、前記選択手段は、前記コンタクト情報記憶手段から前記コンタクト日時を読み出し、読み出した前記コンタクト日時からの経過時間を算出し、算出した経過時間を含む範囲と対応する制御情報を選択することを特徴とする。
【0174】
この構成では、前記選択手段は取得した前記経過時間によって、適切な制御情報を選択し、本発明のロボットは、経過時間に応じた、適切な行動を取ることができる。
(29)また、本発明のロボットを構成する前記コンタクト情報記憶手段は、前記ヒント出力装置が当該ロボットとコンタクトをとった際に、外的要因及び内的要因により当該ロボットに生じる擬似的な感情を示す感情指数を、前記コンタクト情報として記憶しており、前記複数の制御情報は、それぞれ、感情指数の範囲と対応しており、前記選択手段は、前記コンタクト情報記憶手段から前記感情指数を読み出し、読み出した前記感情指数を含む範囲と対応する制御情報を選択することを特徴とする。
【0175】
この構成によると、前記ロボットは、過去に前記ヒント出力装置とコンタクトを取った際に当該ロボットに生じた感情指数を反映して、適切な行動をすることができる。
(30)また、本発明において、前記ヒント出力装置の記憶している前記装置ヒント情報は、前記ヒント出力装置に固有の装置識別情報を含み、前記ロボットは、さらに、当該ロボットと他のヒント出力装置とのコンタクトを示すコンタクト情報を、前記他のヒント識別装置に固有の他の装置識別情報と対応して記憶しているコンタクト情報記憶手段を備え、前記選択手段は、取得した前記装置識別情報と前記他の装置識別情報とが一致しない場合、前記コンタクト情報に基づいて、制御情報を選択することを特徴とする。
【0176】
この構成によると、前記コンタクト情報記憶手段は、前記コンタクト情報を前記他のヒント出力装置に固有の他の装置識別情報と対応して記憶しているため、前記選択手段は、取得した前記装置識別情報と前記他の装置識別情報とを比較することで、前記選択に前記コンタクト情報を用いるか否かを簡単かつ正確に判別することができる。
(31)本発明において、前記装置ヒント情報は、前記装置識別情報に加えて、前記ヒント出力装置を保持する利用者に関する利用者情報を含み、前記コンタクト情報は、前記他のヒント出力装置を保持する利用者に係る他の利用者情報を含み、前記ロボットを構成する前記選択手段は、前記取得手段の取得した前記利用者情報と、前記コンタクト情報に含まれる前記他の利用者情報とが一致するか否かによって、制御情報を選択することを特徴とする。
【0177】
この構成によると、前記選択手段は、前記取得手段の取得した前記利用者情報と、前記コンタクト情報に含まれる前記他の利用者情報とが一致するか否かによって、適切な制御情報を選択することができる。
(32)本発明のロボットは、さらに、前記ヒント出力装置と当該ロボットとのコンタクトの終了を判断する終了判断手段を備え、前記駆動制御手段は、前記選択手段による選択から、前記終了判断手段によって終了と判断されるまでの間、前記選択された制御情報を用いて、前記駆動部を駆動制御することを特徴とする。
【0178】
この構成によると、本発明のロボットは、前記選択手段による選択から、前記終了判断手段によって終了と判断されるまでの間、前記装置ヒント情報の示唆する行動をする。このようにすることで、前記ヒント出力装置が前記ロボットとコンタクトを取っている間に、前記取得手段が、他のヒント出力手段から出力される他の装置ヒント情報を取得したとしても、前記判断手段が終了を判断するまでの間は、前記ロボットは、前記ヒント出力装置から取得した装置ヒント情報の示唆する行動を取り続ける。従って、前記終了判断手段によって終了と判断されるまでの間、前記ヒント出力装置を保持する利用者を満足させるような行動を取り続ける。
【0179】
(33)本発明のロボットを構成する前記終了判断手段は、前記ヒント出力装置へ、通信可能であることを確認する通信確認情報を出力する出力部と、前記通信確認情報を正常に受信したことを示す受信応答を、前記ヒント出力装置から取得する応答取得部と、前記応答取得手段により、前記受信応答が正常に取得されなかった場合に、前記ヒント出力装置と当該ロボットとのコンタクトが終了したと判断する判断部とを含むことを特徴とする。
【0180】
この構成では、前記終了判断手段は、前記通信確認情報を出力し、前記受信応答を正常に受信できなかった場合に終了したと判断するため、正確に前記終了を判断することができる。
(34)本発明のロボットを構成する前記終了判断手段は、外部からの入力情報を取得する取得部と、入力情報を取得してからの時間の経過を計測する計測部と、1の入力情報が取得されてから、一定時間内に、次の入力情報が取得されない場合、前記ヒント出力装置と当該ロボットとのコンタクトが終了したと決定する決定部とを含むことを特徴とする。
【0181】
前記判断部は、1の入力情報が取得されてから、一定時間内に、次の入力情報が取得されない場合、前記ヒント出力装置と当該ロボットとのコンタクトが終了したと判断する。前記ヒント出力装置を保持した利用者が前記ロボット利用する際には、利用者が、当該ロボットに声をかけたり、ロボットに触ったりすると考えられる。従って、前記取得部が、前記入力情報として音声や圧力を初めとする利用者の働きかけを検出すると想定した場合、利用者の働きかけが検出されない状態が一定時間以上継続した場合、前記コンタクトが終了したと、正確に判断することができる。また、利用者が当該ロボットの利用を終えるときを、前記コンタクトの終了と判断するため、前記利用者が、当該ロボットを使用している間中、前記利用者を満足させ続けることができる。
【0182】
(35)本発明のロボットを構成する前記駆動制御手段は、予め、有限確率オートマトンに基づく複数の状態遷移表を保持しており、前記選択手段による選択の後は、前記複数の状態遷移表及び選択された制御情報を用いて、前記駆動制御を行う。前記複数の状態遷移表は、各状態遷移表の対応するノードから他のノードへの遷移確率から構成されており、前記記憶手段の記憶している各制御情報は、それぞれ、各状態遷移表を構成する遷移確率の増減量を定義するものであり、前記駆動制御手段は、選択された制御情報の定義する増減量に従って、各状態遷移表を構成する遷移確率を増加及び減少させ、増加及び減少後の状態遷移表を用いて、前記駆動制御を行うことを特徴とする。
【0183】
この構成では、前記駆動制御手段は、選択された制御情報の定義する増減量に従って、各状態遷移表を構成する遷移確率を増加及び減少させるだけで、容易に、前記ヒント情報の示唆する行動を当該ロボットが行うように、各駆動部を駆動制御することができる。
(36)本発明は、自律的に複数の行動をするロボットとコンタクトを取るヒント出力装置であって、前記ロボットの複数の行動のうちいずれかを示唆する装置ヒント情報を記憶しているヒント記憶手段と、前記装置ヒント情報を前記記憶手段から読み出し、前記ロボットへ出力する出力手段とを備えることを特徴とする。
【0184】
この構成によると、前記ヒント出力装置は、前記ロボットの複数の行動のうちいずれかを示唆する装置ヒント情報を前記ロボットへ出力し、前記ロボットは詳細な指示を受けなくても、前記装置ヒント情報を基に、利用者を満足させるような行動を取る。従って、利用者は、前記ロボットとコンタクトを取る際に、前記ヒント出力装置を、所持しておくだけで、前記ロボットに所望の行動をとらせることができる。
【0185】
(37)本発明の前記ヒント出力装置において、前記記憶手段は、当該ヒント出力装置と前記ロボットとの過去のコンタクトを示すコンタクト情報を、前記ヒント情報として記憶しており、前記ロボットは、前記ヒント出力装置と当該ロボットとのコンタクト中において、当該コンタクトを示す最新コンタクト情報と前記コンタクト情報の更新指示を、前記ヒント出力装置へ出力し、前記ヒント出力装置は、さらに、前記最新コンタクト情報と前記更新指示とを取得する取得手段と、前記更新指示に従って、前記最新コンタクト情報を用いて、前記装置ヒント情報を更新する更新手段とを備えることを特徴とする。
【0186】
この構成では、前記取得手段は、前記最新コンタクト情報を取得し、前記更新手段は、前記コンタクト情報を更新する。従って、前記ヒント出力装置が、次にロボットとコンタクトを取る際に、前記出力手段が、更新された前記コンタクト情報を出力すると仮定すると、前記ヒント出力装置は、今現在の、前記ロボットとのコンタクトを、次回のロボットとのコンタクトに反映させることができる。
【0187】
(38)上記実施の形態1及び変形例の各装置は、具体的には、マイクロプロセッサ、ROM、RAM、ハードディスクユニット、ディスプレイユニット、キーボード、マウスなどから構成されるコンピュータシステムである。前記RAM又は前記ハードディスクユニットには、コンピュータプログラムが記憶されている。前記マイクロプロセッサが、前記コンピュータプログラムに従って動作することにより、各装置は、その機能を達成する。ここで、コンピュータプログラムは、所定の機能を達成するために、コンピュータに対する指令を示す命令コードが複数個組み合わされて構成されたものである。
【0188】
(39)上記実施の形態1及び変形例の各装置を構成する構成要素の一部又は全部は、1個のシステムLSI(Large Scale Integration:大規模集積回路)から構成されているとしてもよい。システムLSIは、複数の構成部を1個のチップ上に集積して製造された超多機能LSIであり、具体的には、マイクロプロセッサ、ROM、RAMなどを含んで構成されるコンピュータシステムである。前記RAMには、コンピュータプログラムが記憶されている。前記マイクロプロセッサが、前記コンピュータプログラムに従って動作することにより、システムLSIは、その機能を達成する。
【0189】
(40)上記実施の形態1及び変形例の各装置を構成する構成要素の一部又は全部は、各装置に脱着可能なICカード又は単体のモジュールから構成されているとしてもよい。前記ICカード又は前記モジュールは、マイクロプロセッサ、ROM、RAM、などから構成されるコンピュータシステムである。前記ICカード又は前記モジュールは、上記の超多機能LSIを含むとしてもよい。マイクロプロセッサが、コンピュータプログラムに従って動作することにより、前記ICカード又は前記モジュールは、その機能を達成する。このICカード又はこのモジュールは、耐タンパ性を有するとしてもよい。
【0190】
(41)本発明は、上記に示す方法であるとしてもよい。また、これらの方法をコンピュータにより実現するコンピュータプログラムであるとしてもよいし、前記コンピュータプログラムからなるデジタル信号であるとしてもよい。
また、本発明は、前記コンピュータプログラム又は前記デジタル信号をコンピュータ読み取り可能な記録媒体、例えば、フレキシブルディスク、ハードディスク、CD−ROM、MO、DVD、DVD−ROM、DVD−RAM、BD(Blu−ray Disc)、半導体メモリなど、に記録したものとしてもよい。また、これらの記録媒体に記録されている前記コンピュータプログラム又は前記デジタル信号であるとしてもよい。
【0191】
また、本発明は、前記コンピュータプログラム又は前記デジタル信号を、電気通信回線、無線又は有線通信回線、インターネットを代表とするネットワーク、データ放送等を経由して伝送するものとしてもよい。
また、本発明は、マイクロプロセッサとメモリとを備えたコンピュータシステムであって、前記メモリは、上記コンピュータプログラムを記憶しており、前記マイクロプロセッサは、前記コンピュータプログラムに従って動作するとしてもよい。
【0192】
また、前記プログラム又は前記デジタル信号を前記記録媒体に記録して移送することにより、又は前記プログラム又は前記デジタル信号を前記ネットワーク等を経由して移送することにより、独立した他のコンピュータシステムにより実施するとしてもよい。
(42)上記実施の形態及び上記変形例をそれぞれ組み合わせるとしてもよい。
【産業上の利用可能性】
【0193】
本発明は、ペットロボットを初めとする各種のロボット及び各種の電気機器を製造、販売する産業や、これらの機器用のソフトウェアを開発、販売する産業、これらの機器と供に用いられる記録機器を製造、販売する産業、これらのロボット及び電気機器を用いて、製品の製造、アミューズメントを初めとする各種のサービスを提供する産業において、経営的に、また継続的かつ反覆的に利用することができる。
【技術分野】
【0001】
外部機器から取得した情報を反映した行動制御を行うロボットに関する。
【背景技術】
【0002】
近年、周囲の環境やユーザからの指示などによって、自律的に動作するペット型ロボットが開発され、販売されている。これらのペット型ロボットに、より現実のペットに近い動作をさせるために、特許文献1では、行動レベルを、段階的に変化させる技術が開示されている。この技術によると、ペット型ロボットは、自身の行動履歴、外部からの入力履歴に基づいて、行動レベルを段階的に、子供らしい行動から大人らしい行動へと変化させる。
【0003】
また、特許文献2には、対面する人に応じて、行動パターンを変更する技術が開示されている。この技術によると、ペット型ロボットは、予め、複数の使用者と個別に対応する行動計画データを記憶しており、音声や顔の画像といった特徴量によって、利用者を識別し、識別した利用者と対応する行動計画データに従って行動する。
【特許文献1】国際公開WO00/67961号公報
【特許文献2】特開2001−101349号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、利用者に、より高い満足感を与ることができるロボットが要望されている。
【課題を解決するための手段】
【0005】
この要望を受けて、本発明は、利用者とコンタクトを取りつつ、自律的に行動するロボットであって、駆動部と、当該ロボットの複数の行動をそれぞれ定義する複数の制御情報を記憶している記憶手段と、ロボットに行動のヒントを与えるヒント出力装置から、前記複数の行動のうちいずれかを示唆する装置ヒント情報を取得する取得手段と、取得した装置ヒント情報により示唆される行動を定義する制御情報を前記記憶手段から選択する選択手段と、選択された制御情報により定義された行動を当該ロボットがするように、選択された制御情報に基づいて、前記駆動部を駆動制御する駆動制御手段とを備えることを特徴とする。
【発明の効果】
【0006】
この構成によると、本発明のロボットは、前記装置ヒント情報の示唆する行動をする。このため、詳細な指示を受けなくても簡単なヒント情報によって、適切な制御情報を選択し、利用者を満足させる行動をすることができる。
【図面の簡単な説明】
【0007】
【図1】擬似ペットシステム1の構成を示す構成図である。
【図2】メモリカード300aの構成を示すブロック図である。
【図3】メモリカード300bの構成を示すブロック図である。
【図4】カード側履歴ファイル314bの詳細を示す。
【図5】擬似ペット100の構成を示すブロック図である。
【図6】有限確率オートマトンの概要を示す。
【図7】状態遷移表A 151の詳細を示す。
【図8】行動ライブラリ108に記憶されている情報を示す。
【図9】確率調整表A 161の詳細を示す。
【図10】ペット側履歴ファイル119の詳細を示す。
【図11】擬似ペット100の動作を示すフローチャートである。
【図12】擬似ペット100aの履歴管理部106aによる状態遷移表の変更及び履歴ファイルの更新の動作を示すフローチャートである。これは、擬似ペット100aの場合の、図11ステップS113の詳細である。
【図13】履歴管理部106aによるペット履歴表に基づく、遷移確率の変更の動作を示すフローチャートである。図12のステップS131の詳細である。
【図14】履歴管理部106aによるカード側履歴ファイルと種別情報に基づく、遷移確率の変更の動作を示すフローチャートである。図12のステップS136の詳細である。
【図15】履歴管理部106aによるカード側履歴ファイルの更新動作を示すフローチャートである。図12のステップS137の詳細である。
【図16】擬似ペット100bの履歴管理部106aによる状態遷移表の変更及び履歴ファイルの更新の動作を示すフローチャートである。これは、擬似ペット100bの場合の、図11ステップS113の詳細である。
【図17】擬似ペット100bの履歴管理部106aによる状態遷移表の変更及び履歴ファイルの更新の動作を示すフローチャートである。図16から続く。
【図18】履歴管理部106bによるペット側履歴ファイル及び性別情報に基づく遷移確率の変更の動作を示すフローチャートである。これは、図16ステップS226の詳細である。
【図19】履歴管理部106bによる、カードタイプ「1」の場合の終了の判定及びペット側履歴ファイルの更新の動作を示すフローチャートである。これは、図16のステップS228の詳細である。
【図20】履歴管理部106bによる、カード側履歴ファイル及びペット側履歴ファイルに基づく遷移確率の変更の動作を示すフローチャートである。これは、図17ステップS239の詳細である。
【図21】履歴管理部106bによる、カード側履歴ファイル及びペット側履歴ファイルに基づく遷移確率の変更の動作を示すフローチャートである。図20から続く。
【図22】履歴管理部106bによる、カード側履歴ファイル及びユーザ履歴表に基づく遷移確率の変更の動作を示すフローチャートである。これは、図17のステップS243の詳細である。
【図23】履歴管理部106bによる、カード側履歴ファイル及びユーザ履歴表に基づく遷移確率の変更の動作を示すフローチャートである。図22から続く。
【符号の説明】
【0008】
1 擬似ペットシステム
100a 擬似ペット
100b 擬似ペット
100c 擬似ペット
101 通信部
102 認証部
103 アンテナ
104 固有情報記憶部
106 履歴管理部
107 行動制御部
108 行動ライブラリ
109 信号処理部
110 情報記憶部
111 駆動部
112 感知部
113 感情管理部
114 時間計測部
300a メモリカード
300b メモリカード
【発明を実施するための最良の形態】
【0009】
1.実施の形態1
本発明の一例である、実施の形態1の擬似ペットシステム1について以下に説明する。
1.1 擬似ペットシステムの概要
本発明の擬似ペットシステム1は、図1に示すように複数の擬似ペット100a、100b、100cとメモリカード300a、300bから構成される。
【0010】
利用者は、図1に示すようにメモリカード300a又は300bを身につけて、擬似ペットに接する。
メモリカード300a及び300bは、非接触ICカードであり、それぞれ、固有のカードIDを記憶している。メモリカード300bは、さらに、複数のペット履歴表を記憶している。ペット履歴表は、メモリカード300bを所持する利用者と擬似ペットが遊んだ際の履歴を示すものであり、擬似ペットを示すペットIDと、そのときの擬似ペットの「喜び・楽しさ」の感情を示すJoy指数を含む。
【0011】
擬似ペット100a及び100bは犬型のペットロボットであり、擬似ペット100cは、ネコ型のペットロボットである。以下、これらを特に区別する必要がないときは、擬似ペット100a〜100cを総称して、擬似ペット100と呼ぶ。擬似ペット100は、利用者による、なでる、たたく、呼びかけるといった働きかけ、温度、照度といった周囲の状況に応じて自律的に動作する。また、擬似ペット100は、メモリカード300a及び300bからの情報の読み出し、メモリカード300bへの情報の書き込みをすることができる。
【0012】
擬似ペット100a及び100cは、メモリカード300bを所持した利用者と遊ぶ際、メモリカード300bからペット履歴表を読み出し、読み出したペット履歴表に基づいて、行動パターンを変化させる。例えば、自身のペットIDと対応するペット履歴表からJoy指数を読み出し、読み出したJoy指数が大きれば、より親密な行動をする。また、自身のペットIDと対応するペット履歴表がない場合、自身と同種の擬似ペットと遊んだ際の履歴、自身と異種の擬似ペットと遊んでからの経過時間などによって、行動を変更する。
【0013】
擬似ペット100bは、擬似ペット100a及び100cとは異なり、複数のユーザ履歴表を生成し、記憶している。ユーザ履歴表は、メモリカードを所持する利用者と擬似ペット100bが遊んだ際の履歴を示すものであり、メモリカードを示すカードIDと、そのときの擬似ペット100bの感情を示すJoy指数を含む。
擬似ペット100bは、メモリカード300aを所持した利用者と遊ぶ際、自身の記憶しているユーザ履歴表に基づいて行動を変化させる。さらに、メモリカード300bを有する利用者と遊ぶ際、自身の記憶しているユーザ履歴表及びメモリカード300bの記憶しているペット履歴表に基づいて行動を変化させる。例えば、メモリカード300bを示すカードIDと対応するユーザ履歴表に記載されているJoy指数が高いが、自身と異種の擬似ペットと最近遊んだことを示すペット履歴表が存在すると、不機嫌な行動をするように、行動パターンを変更する。
1.2 メモリカード300aの構成
メモリカード300aは読み取り専用の非接触ICカードである。
【0014】
メモリカード300aは、図2に示すように、通信部301a、アンテナ303a、認証部302a、制御部307a及び情報記憶部310aから構成される。以下にメモリカード300aを構成する各部について説明する。
(1)情報記憶部310a
情報記憶部310aは、ROMから構成され図2に示すように、カードタイプ311a、カードID312a、性別情報313aを記憶している。
【0015】
カードタイプ311aは、メモリカードの種類を示すものであり、「1」は読み取り専用であること、「2」は読み出し及び書き込み可能であることを示す。ここで、カードタイプ311a「1」は、メモリカード300aが、読み出し専用であることを示している。
カードID312aは、メモリカード300aに固有の識別情報である。
【0016】
性別情報313aは、メモリカード300aの所有者の属性を示す情報の一つであり、「男」又は「女」の何れかである。ここで、性別情報313aは、メモリカード300aの所有者の性別が「男」であることを示している。
(2)通信部301a及びアンテナ303a
通信部301aは、アンテナ303aを介して外部機器と、制御部307a又は認証部302aとの間で、各種の情報の送受信を行う。
【0017】
(3)認証部302a
認証部302aは、制御部307aの指示により、通信部301aを介して外部機器との間で機器認証を行う。機器認証の方法は、一例としてチャレンジアンドレスポンス方式を用いる。認証方法は、これに限るものではない。
機器認証が成功であれば、認証部302aは、制御部307aと外部機器との通信を許可し、失敗であれば、制御部307aと外部機器との間の通信を禁止する。ここで、外部機器とは、擬似ペット100である。
【0018】
(4)制御部307a
通信部301aを介して、擬似ペット100から、チャレンジデータを受信する。チャレンジデータを受信すると、受信したチャレンジデータを認証部へ出力し、機器認証を指示する。
また、制御部307aは、通信部301aを介して、擬似ペット100から、ID要求を受信する。ID要求を受信すると、制御部307aは、情報記憶部310aからカードタイプ311a、カードID312a及び性別情報313aを読み出し、読み出した性別情報313aを通信部301a及びアンテナ303aを介して、擬似ペット100へ送信する。
1.3 メモリカード300bの構成
メモリカード300bは読み書き可能な非接触ICカードである。
【0019】
メモリカード300bは、図3に示すように、通信部301b、アンテナ303b、認証部302b、制御部307b及び情報記憶部310bから構成される。以下にメモリカード300bを構成する各部について説明する。なお、通信部301b、アンテナ303b、認証部302bについては、メモリカード300aを構成する通信部301a、アンテナ303a及び認証部302aと同様であるので、説明を省略する。
【0020】
(1)情報記憶部310b
情報記憶部310bは、ROM及びフラッシュメモリを含んで構成され、図3に示すように、カードタイプ311b、カードID312b、性別情報313b及びカード側履歴ファイル314bを記憶している。
カードタイプ311b、カードID312b及び性別情報313bは、メモリカード300aの説明において、既に説明した通りである。ここでは、カードタイプ311bは、メモリカード300bが、書き込み及び読み出し可能であることを示す「2」であり、性別情報313bは、メモリカード300bの所有者の性別が「男」であることを示している。
【0021】
カードタイプ311b、カードID312b及び性別情報313bは、情報記憶部310bのROMから構成される部分に記憶されており、メモリカード300bの発売前に予め書き込まれている。
カード側履歴ファイル314bは、図4に示すように、複数のペット履歴表320、330、340・・・から構成される。これらは、情報記憶部310bのフラッシュメモリから構成される部分に記憶されており、メモリカード300bの発売後に擬似ペット100により書き込まれたものである。
【0022】
各ペット履歴表は、メモリカード300bを所持した利用者が擬似ペットと遊んだ際の履歴情報であり、ペットID、種別情報、通信回数、更新日時及びJoy指数から構成される。
ペットIDは、メモリカード300bを所持した利用者が遊んだ擬似ペットと対応する識別情報であり、何れかの擬似ペットの有するペットIDと一致する。種別情報は、ペットIDと対応する擬似ペットの種類を示す。一例として、犬型ロボットであることを示す「犬」、ネコ型ロボットであることを示す「猫」などが種別情報としてペット履歴表に含まれている。通信回数は、ペットIDの示す擬似ペットとメモリカード300aを所持する利用者とが、遊んだ回数を示す。更新日時は、ペットIDの示す擬似ペットとメモリカード300bを所持した利用者とが遊んだ最も新しい時を示す日付と時刻を示している。Joy指数は、その際の、擬似ペットの「喜び・楽しさ」を示す指数であり、数値が大きいほど、擬似ペットの感じる(算出する)楽しさが大きいことを示す。Joy指数については、擬似ペット100の説明において、詳しく説明する。
【0023】
(2)制御部307b
制御部307bは、メモリカード300aの制御部307aと同様に、機器認証の指示、カードタイプ311b、カードID312b及び性別情報313bの送信を行う。
これに加えて、制御部307bは、通信部301bを介して擬似ペット100から、履歴要求及び更新情報を受信する。履歴要求は、カード側履歴ファイルの送信を要求するものであり、更新情報は、ペットID、現在日時、種別情報、通信回数及びJoy指数を含んでいる。
【0024】
履歴要求を受信すると、制御部307bは、情報記憶部310bからカード側履歴ファイル314bを読み出し、読み出したカード側履歴ファイル314bを通信部301bを介して、擬似ペット100へ送信する。
更新情報を受信すると、カード側履歴ファイル314b内で、受信した更新情報に含まれるペットIDを含むペット履歴表を検索する。受信したペットIDを含むペット履歴表を検出すると、検出したペット履歴表の、通信回数と更新日時とJoy指数とを受信した更新情報に含まれる通信回数、現在日時、Joy指数によって更新する。
【0025】
受信したペット更新情報に含まれるペットIDを含むペット履歴表を検出できなければ、制御部307bは、受信した更新情報を基に新たなペット履歴表を生成する。ここで、受信した更新情報に含まれる現在日時をペット履歴表中の更新日時とする。次に、制御部307bは、生成したペット履歴表を、カード側履歴ファイル314bに追加する。
ペット履歴表の更新又は生成が終了すると、制御部307bは、正常にカード側履歴ファイルの更新が終了したことを示す完了通知を、通信部301bを介して擬似ペット100へ送信する。
1.4 擬似ペット100
擬似ペット100は、図5に示すように通信部101、認証部102、固有情報記憶部104、履歴管理部106、行動制御部107、行動ライブラリ108、信号処理部109、駆動部111、感知部112、感情管理部113、時間計測部114及び情報記憶部110から構成される。なお、情報記憶部110は、擬似ペット100bにのみ備えられている。
【0026】
通信部101、認証部102、固有情報記憶部104、行動制御部107、行動ライブラリ108、信号処理部109、駆動部111、感知部112、感情管理部113及び時間計測部114は、擬似ペット100a〜100cにおいて、共通でありその構成及び動作は同一である。履歴管理部106の動作は、擬似ペット100a及び100cと、擬似ペット100bとで異なる。説明の便宜上、擬似ペット100a、100b及び100cの備える履歴管理部106をそれぞれ履歴管理部106a、106b及び106cと表記する。
【0027】
以下に、擬似ペット100a〜100cに、共通する部分について説明し、続いて、擬似ペット100a及び100cと100bとで異なる部分について説明する。
<共通の構成部分>
(1)固有情報記憶部104
固有情報記憶部104は、ROMから構成されペットID116と種別情報117とを記憶している。ペットID116は、擬似ペット100に固有の識別情報であり、種別情報117は、擬似ペット100の種類を示す情報である。例えば、犬型のペットロボットである擬似ペット100a及び100bの場合、種別情報「犬」が記憶されており、ネコ型のペットロボットである擬似ペット100cの場合、種別情報「猫」が記憶されている。
【0028】
(2)通信部101及びアンテナ103
通信部101は、アンテナ103を介して履歴管理部106及び認証部102と、メモリカード300との間で各種の情報を送受信する。(以下の説明において、メモリカード300aと300bとを特に区別する必要がないときは、これらを総称してメモリカード300と表記する。また、この場合、メモリカード300を構成する各部についても、通信部101というように、参照符号の「a」及び「b」を省いて表記する)
(3)認証部102
認証部102は、通信部101を介して、メモリカード300の認証部302と機器認証を行う。機器認証の方法には、チャレンジアンドレスポンス方式を用いる。機器認証の方法は、これに限るものではない。
【0029】
機器認証が成功であれば、認証部102は、履歴管理部106とメモリカード300との通信を許可し、失敗であれば、履歴管理部106とメモリカード300との間の通信を禁止する。
(4)時間計測部114
時間計測部114は、水晶発信機を備え、時間の経過を計測し、現在日時を算出する。
【0030】
(5)信号処理部109、駆動部111及び感知部112
感知部112は、具体的には、擬似ペット100の頭部先端に備えられているCCDカメラ141、距離センサ142、マイク143などを含む。また、頭部ユニット123、胴体ユニット126、脚部ユニット121など、擬似ペット100のボディを構成する各部に備えられた圧力センサ144、温度センサ145を含む。
【0031】
信号処理部109は、感知部112から、圧力データ、音声データなど各種のデータを受け取り、受け取ったデータを行動制御部107及び感情管理部113へ出力する。さらに、頭部ユニット123に備えられた圧力センサ144a(図1に示す)から取得した圧力データを履歴管理部106へ出力する。
また、信号処理部109は、行動制御部107から、駆動部111を構成する各部への動作指示を受け取り、受け取った動作指示を、駆動部111の該当部分へ出力する。
【0032】
駆動部111は、脚動作部131、脚部ユニット121、尻尾動作部132、尻尾ユニット122、頭部動作部133、頭部ユニット123、スピーカ124、点灯制御部135、ランプ125などから構成される。
脚部ユニット121、尻尾ユニット122、頭部ユニット123などは、図1に示すように擬似ペット100のボディを構成しており、脚動作部131、尻尾動作部132、頭部動作部133は、それぞれ、対応するユニット自体を前後左右に動作させたり、回転させたりするアクチュエータを備えている。脚動作部131、尻尾動作部132、頭部動作部133は、信号処理部109から動作指示を受け取り、受け取った動作指示に従って、各ユニットを動作させる。
【0033】
スピーカ124は、信号処理部109からの動作指示に従った音声を生成し、生成した音声を出力する。ここで、スピーカ124は、例えば、甘えた声、怒った声、疲れた声、うなり声など数種類の音声を生成する。
ランプ125は、図1に示す様に、頭部ユニット123の目に当たる部分に内蔵されており、複数のランプを含んで構成される。点灯制御部135は、信号処理部109から動作指示を受け取り、受け取った動作指示に従って、ランプ125を点灯、消灯、点滅させる。ここで、点灯されるランプの色は、擬似ペットの感情を表現しており、例えば、赤は怒り、緑は喜び、青は悲しみを表現し、その感情の強さにより、光の強さや、点滅の周期が変化する。
【0034】
このような、自律動作するペットロボットの動作制御や、各センサから出力されるデータの処理については、特許文献2が詳しい。
(6)感情管理部113
感情管理部113は、喜び、悲しみ、怒り、疲れといった擬似的な感情を、数値化して計数するカウンタを備えている。具体的には、感情管理部113は、喜びや楽しさを示すJoy指数、怒りを示すanger指数、疲れを示すfatigue指数、悲しみを示すsad指数を計数する。
【0035】
また、感情管理部113は、予め、受け取るデータの種類及び数値と、受け取ったデータに応じて加算又は減算する指数の種類と数値とを対応付けて記憶している。
感情管理部113は、信号処理部109を介して感知部112から圧力データ、音声データ、温度データ、照度データなどの各種のデータを受け取り、受け取ったデータにより、各指数を増減させる。例えば、圧力センサから2.0以上の圧力データを受け取った場合、つまりたたかれた場合、sad指数に10加算し、Joy指数から15減じる。温度センサからの温度データが15度未満から15度以上に変化すると、Joy指数に10加算する。
【0036】
また、感情管理部113は、行動制御部107から、信号処理部109へ出力される動作指示を取得し、取得した動作指示によって各指数を増減させる。例えば、怒った声の音声を出力する旨の動作指示を取得すると、anger指数を2減少させる。尻尾ユニットを左右に動作させる旨の動作指示を取得するJoy指数を3増加させる。
擬似的な感情の制御について、ここでは、非常に単純なモデルについて、説明したが、特許文献2には、関数を用いて、より複雑な感情の制御をする方法が説明されており、このような方法を用いても良い。
【0037】
また、ここでは、感情を示す指数は4つのみであるが、驚き、嫌悪といったその他の感情を示す指数や、運動欲、食欲といった生理的感情を示す指数を計数しても良い。
(7)行動ライブラリ108及び行動制御部107
行動制御部107は、有限確率オートマトンと呼ばれるアルゴリズムに基づいて、擬似ペット100の動作を制御する。図6は、この有限確率オートマトンを模式的に示したものである。図7は、有限確率オートマトンに基づく制御を実現するために、行動制御部107が用いる状態遷移表の一例を示している。図6及び図7を用いて、有限確率オートマトンに基づく動作制御について、以下に説明する。
【0038】
図6に示すノードA 211、ノードB 212、ノードC 213・・・は、それぞれ、擬似ペットの状態を示している。例えば、基本姿勢で立っている状態、転倒した状態、座っている状態などである。ノード間を接続する矢印は、ノードからノードへの状態遷移216、217、218・・・を示している。各状態遷移には、予め所定の確率(遷移確率と呼ぶ)が割り当てられており、行動制御部107は、遷移確率に応じて、確率的に遷移先のノードを決定する。図中の(a)、(b)、(c)・・・は、状態遷移に伴う擬似ペット100の動作であり、図7(詳細は後述)中の動作236、237、238・・・と同一である。
【0039】
行動制御部107は、各ノードに対応する状態遷移表を用いて、このような確率的な状態遷移を実現する。図7は、行動制御部107が使用する状態遷移表のうち、ノードA 211に対応する状態遷移表A 151の詳細を示している。ここで、ノードAは、基本姿勢(正面を向いて立っている)の状態と対応している。
図7に示す状態遷移表A 151は、横方向に遷移先231、232、233・・・を配置している。遷移先は、ノードAから状態遷移先となるノードの名称である。各遷移先の下には、ノードAから遷移する際に、擬似ペットが行う動作236、237、238・・・が記載されている。なお、説明の便宜上横方向に列番号A、B、C・・・が、縦方向行番号1、2、3・・・を記載している。
【0040】
縦方向には、状態遷移のトリガとなる外部からの入力イベント243、244・・・が配されている。各入力イベントの隣の列には、入力イベントを特定する具体的なデータのデータ名が配されており、その隣の列には、状態遷移のトリガとなるためのデータの範囲245・・・が配されている。データ名246、247、248・・・は、入力イベントがない場合に、状態遷移のトリガとなる擬似感情の指数の名称が記載されている。これらの入力イベント又は感情指数のうち行番号が小さいものほど優先度が高い。つまり、入力イベント243「音声の検出」と入力イベント244「なでる」とを両方同時に検出した場合、行動制御部107は、入力イベント243「音声の検出」を状態遷移のトリガとして採用する。
【0041】
行番号の付された行と、列番号の付された列の交点の欄には、遷移確率が記載されている。なお遷移確率「0%」の記載は、省略している。図の理解を助けるために、図中の行番号x、列番号yの欄には、(xy)と記載している。以下、この欄をセル(xy)と呼ぶ。
例えば、列番号Aの列の遷移先231「ノードA」の下には、動作236「(a)尻尾を振る」と記載されており、行番号1の行に、入力イベント243「音声の検出」、データ名241「音声」、範囲245「3以上」が記載され、セル(A1)には、遷移確率251「20」が記載されている。これは、レベル「3以上」の音声を検出した場合、「20」%の確率で、「(a)尻尾を振る」という動作を伴って、ノードAに状態遷移することを示している。(ここでは、同一のノードに戻る場合も、状態遷移と呼ぶ)。
【0042】
また、一例として、列番号Cの列には、遷移先233「ノードC」、動作238「(c)甘えた声を出力」と記載されており、行番号6の行には、データ名247「fatigue指数」、範囲250「50以上」と記載されており、セル(C6)には、遷移確率252「30」と記載されている。これは、fatigue指数が「50」以上である場合、「30」%の遷移確率で、「(c)甘えた声を出力」してノードCへ状態遷移することを示している。
【0043】
行動ライブラリ108は、ROM及びRAMを含んで構成され、図8に示すように状態遷移表A 151、状態遷移表B 152・・・状態遷移表Z 154と動作手順a 156、動作手順b 157・・・動作手順z 159、確率調整表A 161、確率調整表B 162、確率調整表C 163、確率調整表D 164を記憶している。
状態遷移表A 151、状態遷移表B 152・・・状態遷移表Z 154は、既に説明した有限確率オートマトンのノードA、ノードB・・・ノードZと、それぞれ対応している。状態遷移表の具体的構成については、図7を用いて説明した通りである。
【0044】
動作手順a 156、動作手順b 157・・・動作手順z 159は、状態遷移の際の擬似ペット100の動作手順を含んでおり、動作手順a 156、動作手順b 157・・・は、図7の動作236「a:尻尾を振る」、動作237「b:方向転換」・・・と、それぞれ、対応している。例えば、動作手順a 156は、尻尾ユニット122を左右に動作させることを示す動作指示を、信号処理部109を介して、尻尾動作部132へ出力する手順を含んでいる。
【0045】
確率調整表A 161〜確率調整表D 164は、擬似ペット100の行動を変化させる際に、履歴管理部106によって用いられるものであり、各状態遷移表の遷移確率の増減量を定義するものである。
一例として、図9は、確率調整表A 161の構成を示している。確率調整表Aは、ノード名271、272、273・・・と、各ノード名と対応する調整量276、277、278・・・とから構成されている。各調整量は、複数の増減量を含んで構成され、各増減量は、ノード名と対応する状態遷移表に含まれる遷移確率に加算又は減算される値である。
【0046】
例えば、ノード名271「ノードA」と対応する調整量276には、増減量281「(C1)+10」、増減量282「(D1)−10」・・・が含まれる。増減量281「(C1)+10」は、「ノードA」と対応する状態遷移表A 151において、セル(C1)の遷移確率に加算する値が「10」であることを示しており、増減量282「(D1)−10」は、セル(D1)の遷移確率から減じる値が「10」であることを示している。
【0047】
確率調整表B162〜確率調整表D164についても、同様の構成である。
確率調整表A 161に基づいて、各状態遷移表の遷移確率を変更した場合、擬似ペット100は、尻尾を振る、甘えた声を出力する、体を摺り寄せるといった好意的な動作を行う確率が高く、怒った声を出力する、噛み付くといった敵対的な動作を行う確率が低くなり、全体的にやや親密な行動をとる。
【0048】
確率調整表B 162に基づいて、各状態遷移表の遷移確率を調整した場合、擬似ペット100は、好意的な動作を行う確率がさらに高くなり、非常に親密な行動をとる。
確率遷移表C 163に基づいて、各状態遷移表の遷移確率を調整した場合、擬似ペット100は、好意的な動作を行う確率が低く、姿勢を低くする、うなり声を出力する、逃げるといった警戒した動作を行う確率が高くなり、全体的に警戒的な行動をとる。
【0049】
確率遷移表D 164に基づいて、各状態遷移表の遷移確率を調整した場合、擬似ペット100は、甘えた声を出力した直後に噛み付く、体を摺り寄せた直後に怒った声を出力するといった、相反する行動を連続して行う確率が高くなり、全体的に親密だが不機嫌な行動をとる。
行動制御部107は、信号処理部109を介して、感知部112から、圧力データ、音声データ、温度データを初めとする各種のデータを取得する。また、定期的に、感情管理部113がカウントしている4つの感情指数を監視する。
【0050】
擬似ペット100の電源がONになると、行動制御部107は、先ず、状態遷移表A 151を読み出す。読み出した状態遷移表A 151と、受け取った各種のデータ及び感情指数に基づいて、次に行う動作と遷移先のノードとを決定する。決定した動作と対応する動作手順に従って、信号処理部109を介して駆動部111へ動作指示を出力し、続いて、遷移先に決定したノードと対応する状態遷移表を読み出す。
【0051】
以下、同様にして、行動ライブラリ108の記憶している状態遷移表A 151、状態遷移表B 152・・・状態遷移表Z 154、動作手順a 156、動作手順b 157・・・動作手順z 159を用いて、擬似ペット100の行動を制御する。
また、履歴管理部106が、確率調整表を用いて、各状態遷移表を構成する遷移確率を増減させて状態遷移表の一部を変更した場合、行動制御部107は、変更後の状態遷移表を用いて、行動制御を続ける。
【0052】
以下の説明において、動作手順a 156〜動作手順z 159により定義される個々の動きを「動作」と呼び、各状態遷移表を用いて実行される擬似ペット100の一連の動作の組み合わせを「行動」と呼ぶ。
<個別の構成部分A>
以下に、擬似ペット100aを構成する履歴管理部106aについて説明する。
(A1)履歴管理部106a
擬似ペット100aを構成する履歴管理部106aは、予め、回数閾値「20」、Joy閾値「80」、無遊戯期間閾値「7日」、種別履歴閾値「50」、猫接触閾値「24時間」を記憶している。これらの情報は、メモリカード300を所持した利用者に対して、非常に親密な行動、やや親密な行動、通常の行動、警戒した行動、非常に親密だが不機嫌な行動、通常の行動のうち、いずれの行動を取るかを決定する基準値となる値である。ここで、通常の行動とは、初期状態の状態遷移表を用いて、行動制御する場合に擬似ペット100のとる行動を指す。
【0053】
また、送信間隔「15秒」を記憶している。送信間隔は、読み書き可能なメモリカード300bへ、更新情報(後述する)を送信する時間間隔である。さらに、履歴管理部106は時間の経過を計測するカウンタtを備えている。
履歴管理部106aは、信号処理部109を介して、頭部ユニット123に備えられた圧力センサ144aからの圧力データを取得する。圧力データを取得すると、履歴管理部106aは、認証部102へ、メモリカード300との間の機器認証を指示する。認証部102による機器認証が失敗であれば、以下の処理を中止する。
【0054】
認証部102による機器認証が成功であれば、履歴管理部106aは、通信部101を介してメモリカード300へ、カードIDの送信を要求するID要求を送信する。次に、通信部101を介して、カードタイプとカードIDと性別情報とを受信する。受信したカードタイプが読み出し専用カードであることを示す「1」であると、履歴管理部106aは、何もしない。
【0055】
受信したカードタイプが、読み書き可能であることを示す「2」であると、履歴管理部106aは、メモリカード300へ、メモリカード300の記憶している履歴情報の送信を要求する履歴要求を送信する。(カードタイプ「2」を記憶しているメモリカードは、メモリカード300bであるので、以下、メモリカード300bと記載する)
次に、履歴管理部106aは、メモリカード300bから、カード側履歴ファイルを受信する。カード側履歴ファイルを受信すると、固有情報記憶部104からペットID116を読み出し、読み出したペットID116を含むペット履歴表を、受信したカード側履歴表内で検索する。読み出したペットID116を含むペット履歴表を検出した場合、検出したペット履歴表から通信回数を読み出し、読み出した通信回数に1加算したものを変数pに代入し、変数pを一時的に記憶する。変数pは、メモリカード300bと擬似ペット100aとの通信回数をカウントするための変数である。次に、履歴管理部106aは、検出したペット履歴表に基づいて状態遷移表の遷移確率を変更する。
【0056】
読み出したペットID116を含むペット履歴表が存在しない場合、履歴管理部106aは、変数pに1を代入し、一時的に記憶する。次に、受信したカード側履歴ファイル及び擬似ペット100a自身の種別情報に基づいて、状態遷移表の遷移確率を変更する。
状態遷移表の遷移確率を変更すると、次に、定期的にメモリカード300へ、更新情報を送信する。
【0057】
以上、概要を述べた
(A1−1)ペット履歴表に基づく遷移確率の変更
(A1−2)カード側履歴ファイル及び種別情報に基づく遷移確率の変更
(A1−3)更新情報の送信
について、詳細に説明する。
(A1−1)ペット履歴表に基づく遷移確率の変更
履歴管理部106aは、検出したペット履歴表から通信回数を読み出す。読み出した通信回数と回数閾値「20」とを比較する。さらに、検出したペット履歴表からJoy指数を読み出し、読み出したJoy指数と、Joy閾値「80」とを比較する。
【0058】
これらの比較の結果、通信回数が「20」以上で、Joy指数が「80」以上であれば、履歴管理部106aは、行動ライブラリ108から確率調整表B162を読み出し、読み出した確率調整表B 162を用いて、状態遷移表A151〜状態遷移表Z154に記載されている遷移確率を増減させる。
比較の結果、通信回数が「20」以上で、Joy指数が「80」未満であれば、行動ライブラリ108から確率調整表A 161を読み出し、読み出した確率調整表A 161を用いて状態遷移表A151〜状態遷移表Z154に記載されている遷移確率を増減させる。
【0059】
比較の結果、通信回数が「20」未満で、joy指数が「80」未満であれば、遷移確率の変更は行わない。
比較の結果、通信回数が「20」未満で、joy指数が「80」以上であれば、検出したペット履歴表から更新日時を読み出す。次に、時間計測部114から現在日時を取得し、取得した現在日時と読み出した更新日時との差を算出する(この差を無遊戯期間と呼ぶ)。無遊戯期間が無遊戯期間閾値「7日」以内であれば、確率調整表A 161を用いて、遷移確率を変更する。
【0060】
無遊戯期間が「7日」を越えていれば、遷移確率の変更は行わない。
(A1−2)カード側履歴ファイル及び種別情報に基づく遷移確率の変更
履歴管理部106aは、受信したカード側履歴ファイルを構成するペット履歴表のうち、擬似ペット100a自身の種別情報「犬」と同一の種別情報を含んでいるものを選択し、選択したペット履歴表に記載されている通信回数の和を算出する(以下、算出した和をD履歴指数と呼ぶ)。
【0061】
次に、履歴管理部106aは、自身の種別情報「犬」とは異なる種別情報「猫」を含むペット履歴表を選択する。選択したペット履歴表に含まれる更新日時のうち最も新しいものを抽出する。(以下、ここで抽出した更新日時を猫接触時と呼ぶ)。
次に、履歴管理部106aは、時間計測部114から現在日時を取得し、取得した現在日時から猫接触時を減算して、経過時間を算出する。算出した経過時間が猫接触閾値「24時間」未満であれば、行動ライブラリ108から、確率調整表C 163を読み出し、読み出した確率調整表C 163を用いて状態遷移表A 151〜状態遷移表Z 154の遷移確率を増減させる。
【0062】
算出した経過時間が「24時間」以上であれば、履歴管理部106aは、次に、算出したD履歴指数と種別履歴閾値「50」とを比較する。算出したD履歴指数が「50」未満であれば、遷移確率の変更を行わない。
算出したD履歴指数が「50」以上であれば、確率調整表A 161を用いて、状態遷移表A 151〜状態遷移表Z 154の遷移確率を増減させる。
(A1−3)更新情報の送信
次に、履歴管理部106aは、カウンタtを「0」に初期化し、時間の計測を開始する。カウンタtが送信間隔「15秒」になると、感情管理部113からJoy指数を取得し、時間計測部114から現在日時を取得し、固有情報記憶部104からペットID116と種別情報117とを読み出す。
【0063】
次に、通信部101を介して、読み出したペットID、種別情報、取得した現在日時、Joy指数、通信回数を送信する。ここで、通信回数は、履歴管理部106aが記憶している変数pである。以下、メモリカード300bに送信するこれらの情報をまとめて、更新情報と呼ぶ。
次に、履歴管理部106aは、更新情報を送信してからの時間を計測する。所定時間内に、正常に更新情報を受信しカード側履歴情報を更新したことを示す完了通知をメモリカード300bから受信すると、カウンタtを「0」に初期化し、同様の処理を繰り返す。
【0064】
所定時間内に、完了通知を受信しなければ、履歴管理部106aは、行動ライブラリ108に記憶されている状態遷移表A〜状態遷移表Zの遷移確率を変更前の状態に戻す。(遷移確率の変更をしていなければ何もしない)
以上、擬似ペット100aを構成する履歴管理部106aについて説明してきたが、擬似ペット100cを構成する履歴管理部106cの構成及び動作は、履歴管理部106aとほぼ同様である。上記の説明において、猫接触閾値「24時間」を、犬接触閾値「24時間」と読み替え、種別情報「犬」と種別情報「猫」とを入れ替えればよいので、履歴管理部106cについての説明は省略する。
<個別の構成部分B>
以下に、擬似ペット100bを構成する情報記憶部110及び履歴管理部106bについて説明する。
【0065】
(B1)情報記憶部110
情報記憶部110は、フラッシュメモリなどの、書き込み及び消去可能な記録媒体から構成され、一例として、図10に示すようなペット側履歴ファイル119を記憶している。ペット側履歴ファイル119は、図10に示すように、複数のユーザ履歴表180、190、200・・・を含む。
【0066】
各ユーザ履歴表は、カードID、性別情報、通信回数、更新日時、Joy指数から構成される。カードIDは、擬似ペット100bと通信したメモリカードを一意に識別する情報であり、メモリカードが記憶しているカードIDと同一である。性別情報は、カードIDの示すメモリカードの所有者の性別であり、メモリカードの記憶している性別情報と一致する。通信回数は、擬似ペット100bがカードIDの示すメモリカードと通信した累積回数である。更新日時は、メモリカードと通信した最も新しい日時を示す。Joy指数は、更新日時の示すときに、メモリカードを有する利用者と遊んだ際に感情管理部113の計数したdoy指数の値である。
【0067】
例えば、ユーザ履歴表180は、カードID181「001A」、性別情報182「男」、通信回数183「10」、更新日時184「2005.3.14.10:30」及びJoy指数186「70」を含む。これは、擬似ペット100がカードID「001A」と性別情報「男」を有するメモリカードと過去に「10」回通信したことがあり、10回の通信のうち、最新の通信は、「2005.3.14.10:30」に行われており、その際の、擬似ペット100bのJoy指数が「70」であったことを示している。
【0068】
(B2)履歴管理部106b
履歴管理部106bは、予め、回数閾値「20」、Joy閾値「80」、無遊戯期間閾値「7日」、種別履歴閾値「50」、猫接触閾値「24時間」及び性別履歴閾値「100」を記憶している。これらの情報は、メモリカード300を所持した利用者に対して、非常に親密な行動、やや親密な行動、通常の行動、警戒した行動、非常に親密だが不機嫌な行動、通常の行動のうち、いずれの行動を取るかを判断する基準値となる値である。
【0069】
また、送信間隔「15秒」と接触間隔「60秒」とを記憶している。送信間隔は、書き込み可能なメモリカード300bへ、更新情報を送信する時間間隔である。接触間隔は、読み出し専用のメモリカード300aを所持した利用者と擬似ペット100bが遊ぶ際に、遊び終わりを判定する基準となる時間である。また、履歴管理部106bは時間の経過を計測するカウンタtを備えている。
【0070】
履歴管理部106bは、信号処理部109を介して、頭部ユニット123に備えられた圧力センサ144aからの圧力データを取得する。圧力データを取得すると、履歴管理部106bは、認証部102へ、メモリカード300との間の機器認証を指示する。認証部102による機器認証が失敗であれば、以下の処理を中止する。
認証部102による機器認証が成功であれば、履歴管理部106bは、通信部101を介してメモリカード300へ、カードIDの送信を要求するID要求を送信する。次に、通信部101を介して、カードタイプとカードIDと性別情報とを受信する。
【0071】
(B2−1)カードタイプ「1」の場合
受信したカードタイプが読み出し専用カードであることを示す「1」の場合、つまり通信相手のメモリカードがメモリカード300aの場合、情報記憶部110の記憶しているペット側履歴ファイル119において、受信したカードIDを含むユーザ履歴表を検索する。
【0072】
受信したカードIDを含むユーザ履歴表が存在しなければ、ペット側履歴ファイル119と受信した性別情報とに基づいて、行動ライブラリ108の状態遷移表A 151〜状態遷移表Z 154の遷移確率を変更する。
受信したカードIDを含むユーザ履歴表を検出すると、履歴管理部106bは、検出したユーザ履歴表に基づいて、行動ライブラリ108の状態遷移表A 151〜状態遷移表Z 154の遷移確率を変更する。
【0073】
遷移確率を変更すると、カウンタtを用いて、メモリカード300aを所持した利用者が擬似ペット100bと遊び終わったか否かを判定し、遊び終わったときに、ペット側履歴ファイル119の内容を更新する。
以下に、
(B2−1−1)ペット側履歴ファイル及び性別情報に基づく遷移確率の変更
(B2−1−2)ユーザ履歴表に基づく遷移確率の変更
(B2−1−3)遊び終わりの判定とペット側履歴ファイルの更新
について、詳細に説明する。
(B2−1−1)ペット側履歴ファイル及び性別情報に基づく遷移確率の変更
履歴管理部106bは、情報記憶部110に記憶されているペット側履歴ファイル119において、受信した性別情報と一致する性別情報を含むユーザ履歴表を選択する。選択したユーザ履歴表に含まれる通信回数の和を算出する。(以下、ここで算出した和を、性別履歴指数と呼ぶ)
次に、履歴管理部106bは、算出した性別履歴指数と性別履歴閾値「100」とを比較する。性別履歴指数が100以上であれば、行動ライブラリ108から、確率調整表A 161を読み出し、読み出した確率調整表A 161を用いて、状態遷移表A 151〜状態遷移表Z 154の制御部に確率を変更する。
【0074】
算出した性別指数が100未満であれば、何もしない。
(B2−1−2)ユーザ履歴表に基づく遷移確率の変更
履歴管理部106bは、検出したユーザ履歴表を用いて、何れの確率調整表を用いて遷移確率を変更するか、又は、遷移確率の変更をするか否かを判定し、判定結果に従って、状態遷移表A〜状態遷移表Zの遷移確率を増減させる。
【0075】
ここでの処理は、既に説明した、擬似ペット100aを構成する履歴管理部106aによる、(A1−1)ペット履歴表に基づく遷移確率の変更とほぼ同一であり、ペット履歴表をユーザ履歴表と読み替えればよいので、簡単な説明にとどめる。
(B2−1−3)遊び終わりの判定とペット側履歴ファイルの更新
上記の手順で、遷移確率を変更すると、履歴管理部106bは、次に、カウンタtを「0」に初期化し、時間の計測を開始する。接触間隔「60秒」以内に、信号処理部109を介して頭部ユニット123に備えられた圧力センサ144aからの圧力データを受け取ると、カウンタtを「0」に初期化する。「60秒」以内に圧力データを受け取らなければ、遊び終えたと判断する。
【0076】
遊び終えたと判断すると、履歴管理部106bは、感情管理部113からJoy指数を取得し、時間計測部114から現在日時を取得する。
メモリカード300aから受信したカードIDを含むユーザ履歴表がペット側履歴ファイル119内に存在しない場合、新たなユーザ履歴表を生成する。ここで、新たなユーザ履歴表のカードID、性別情報には、受信したカードIDと性別情報とを記載する。通信回数には「1」の値を記載する。更新日時には、取得した現在日時を記載し、Joy指数には、取得したJoy指数を記載する。
【0077】
メモリカード300aから受信したカードIDを含むユーザ履歴表をペット側履歴ファイル119内で検出した場合、履歴管理部106bは、検出したユーザ履歴表の更新日時を、取得した現在日時により更新し、Joy指数を、取得したJoy指数により更新する。次に、通信回数に1加算する。
ペット側履歴ファイルを更新し終えると、履歴管理部106bは、カウンタtを停止させ、状態遷移表A 151〜状態遷移表Z 154の遷移確率を初期値に戻す。
【0078】
(B2−2)カードタイプ「2」の場合
受信したカードタイプが、読み書き可能であることを示す「2」の場合、つまり、通信相手のメモリカードがメモリカード300bである場合、履歴管理部106bは、通信部101を介して、メモリカード300bへ、履歴要求を送信する(カードタイプ「2」を記憶しているメモリカードは、メモリカード300bであるので、以下、メモリカード300bと記載する)。次に、履歴管理部106bは、メモリカード300bから、カード側履歴ファイルを受信する。カード側履歴ファイルを受信すると、次に、情報記憶部110の記憶しているペット側履歴ファイル119において、受信したカードIDを含むユーザ履歴表を検索する。
【0079】
受信したカードIDを含むユーザ履歴表が存在しなければ、履歴管理部106bは、変数pに1を代入し、これを一時的に記憶する。変数pは、メモリカード300bと擬似ペット100bとの通信回数をカウントするための変数である。次に、履歴管理部106は、受信したカード側履歴ファイル及び情報記憶部110の記憶しているペット側履歴ファイル119に基づいて、状態遷移表A 151〜状態遷移表Z 154の遷移確率を変更する。
【0080】
受信したカードIDを含むユーザ履歴表を、ペット側履歴ファイル119内で検出した場合、履歴管理部106bは、検出したユーザ履歴表から通信回数を読み出し、読み出した通信回数に1加算したものを変数pに代入し、これを一時的に記憶する。次に、メモリカード300bから、取得したカード側履歴ファイルと検出したユーザ履歴表とに基づいて、状態遷移表A 151〜状態遷移表Z 154の遷移確率を変更する。
【0081】
遷移確率を変更し終えると、定期的に、更新情報を送信する。更新情報の送信に対する応答がなくなると、メモリカード300bを所持した利用者が、擬似ペット100bと遊び終えたと判断し、ペット側履歴ファイルを更新する。
上記の、
(B2−2−1)カード側履歴ファイル及びペット側履歴ファイルに基づく遷移確率の変更
(B2−2−2)カード側履歴ファイルとユーザ履歴表とに基づく遷移確率の変更
(B2−2−3)更新情報の送信
(B2−2−4)ペット側履歴ファイルの更新
について、以下に詳細に説明する。
(B2−2−1)カード側履歴ファイル及びペット側履歴ファイルに基づく遷移確率の変更
履歴管理部106bは、受信したカード側履歴ファイルから、擬似ペット100b自身の種別を示す種別情報「犬」を含むペット履歴表を選択する。選択したペット履歴表に含まれる通信回数を、全て加算してD履歴指数を算出する。
【0082】
続いて、履歴管理部106bは、受信したカード側履歴ファイルから、種別情報「猫」を含むペット履歴表を選択し、選択したペット履歴表に含まれる更新日時のうち最も新しいものを抽出する(以下、猫接触時と呼ぶ)。次に、履歴管理部106bは、時間計測部114から現在時刻を取得し、取得した現在時刻から猫接触時を減じて経過時間を算出する。
【0083】
次に、履歴管理部106bは、情報記憶部110の記憶しているペット側履歴ファイル119内で、受信した性別情報と同一の性別情報を含むユーザ履歴表を選択する。選択したユーザ履歴表に含まれる通信回数を全て加算して性別履歴指数を算出する。
次に、履歴管理部106bは、算出した経過時間と猫接触閾値「24時間」とを比較し、経過時間が「24時間」未満であれば、確率調整表C 163を用いて状態遷移表A〜状態遷移表Zの遷移確率を増減させる。
【0084】
算出した経過時間が「24時間」以上であれば、さらに、算出した性別履歴指数と性別履歴閾値「100」とを比較し、算出したD履歴指数と種別履歴閾値「50」とを比較する。
性別履歴指数が「100」以上であり、かつ、D履歴指数が「50」以上であれば、履歴管理部106bは、確率調整表Bを用いて、状態遷移表A 151〜状態遷移表Z 154の遷移確率を増減させる。
【0085】
性別履歴指数が「100」以上であり、かつ、D履歴指数が「50」未満の場合、又は、性別履歴指数が「100」未満であり、かつ、D履歴指数が「50」以上の場合、履歴管理部106bは、確率調整表Aを用いて、状態遷移表A 151〜状態遷移表Z 154の遷移確率を増減させる。
性別履歴指数が「100」未満であり、かつ、D履歴指数が「50」未満の場合遷移確率の変更は行わない。
(B2−2−2)カード側履歴ファイルとユーザ履歴表とに基づく遷移確率の変更
履歴管理部106bは、受信したカード側履歴ファイルから、種別情報「猫」を含むペット履歴表を選択し、選択したペット履歴表に含まれる更新日時のうち最も新しいものを抽出する(以下、猫接触時と呼ぶ)。次に、履歴管理部106bは、時間計測部114から現在時刻を取得し、取得した現在時刻から猫接触時を減じて経過時間を算出する。
【0086】
次に、ペット側履歴ファイル119内において検出したユーザ履歴表から通信回数を読み出し、読み出した通信回数と回数閾値「20」とを比較する。
通信回数が「20」以上であれば、履歴管理部106bは、次に、検出したユーザ履歴表からJoy指数を読み出し、読み出したJoy指数とJoy閾値「80」とを比較する。読み出したJoy閾値が「80」未満であれば、履歴管理部106bは、確率調整表A 161を用いて、状態遷移表A 151〜状態遷移表Z 154の遷移確率を増減させる。読み出したJoy指数とJoy閾値「80」とを比較する。
【0087】
読み出したJoy閾値が「80」以上であれば、履歴管理部106は、さらに、算出した経過時間と猫接触閾値「24時間」とを比較し、経過時間が「24時間」未満であれば、確率調整表D 164を用いて状態遷移表A〜状態遷移表Zの遷移確率を増減させる。経過時間が「24時間」以上であれば、確率調整表B 162を用いて状態遷移表A〜状態遷移表Zの遷移確率を増減させる。
【0088】
通信回数が「20」未満であれば、履歴管理部106bは、次に、算出した経過時間と猫接触閾値「24時間」とを比較し、経過時間が「24時間」未満であれば、確率調整表C 163を用いて状態遷移表A〜状態遷移表Zの遷移確率を増減させる。
経過時間が「24時間」以上であれば、履歴管理部106bは、検出したユーザ履歴表から更新日時を読み出す。次に、時間計測部114から現在日時を取得し、取得した現在日時から読み出した更新日時を減じて無遊戯期間を算出する。算出した無遊戯期間が無遊戯期間閾値「7日」未満であれば、確率調整表A 161を用いて状態遷移表A〜状態遷移表Zの遷移確率を増減させる。算出した無遊戯期間が無遊戯期間閾値「7日」以上であれば、遷移確率の変更は行わない。
(B2−2−3)更新情報の送信
遷移確率の変更を終えると、履歴管理部106bは、カウンタtを用いて、定期的に更新情報をメモリカード300bへ送信し、送信に対する応答がなくなると遊び終えたと判定する。具体的な処理手順は、擬似ペット100aを構成する履歴管理部106aによる(A1−3)更新情報の送信の手順と同様であるので、ここでは、説明を省略する。
(B2−2−4)ペット側履歴ファイルの更新
遊び終えたと判断すると、履歴管理部106bは、感情管理部113からJoy指数を取得し、時間計測部114から現在日時を取得する。
【0089】
メモリカード300aから受信したカードIDを含むユーザ履歴表がペット側履歴ファイル内に存在しない場合、新たなユーザ履歴表を生成する。ここで、新たなユーザ履歴表のカードID、性別情報には、受信したカードIDと性別情報とを記載する。通信回数には「1」の値を記載する。更新日時には、取得した現在日時を記載し、Joy指数には、取得したJoy指数を記載する。
【0090】
メモリカード300aから受信したカードIDを含むユーザ履歴表がペット側履歴ファイル内に存在する場合、検出したユーザ履歴表の更新日時を、取得した現在日時により更新し、Joy指数を、取得したJoy指数により更新する。次に、通信回数に1加算する。
ペット側履歴ファイルを更新し終えると、履歴管理部106bは、カウンタtを停止させ、状態遷移表A 151〜状態遷移表Z 154の遷移確率を初期値に戻す。
1.5 動作
(1)擬似ペット100の動作
以下に、擬似ペット100の動作について、図11に示すフローチャートを用いて説明する。
【0091】
電源をONにされると(ステップS101)、擬似ペット100の行動制御部107は、行動ライブラリ108に記憶されている状態遷移表A 151〜状態遷移表Z 154を用いて、擬似ペット100の行動制御を継続的に行う(ステップS102)。
一方、履歴管理部106は、頭部ユニット123の備える圧力センサ144aからの圧力データを受け取ると(ステップS106のYES)、認証部102にメモリカード300との機器認証を指示し、認証部102は、メモリカード300との機器認証を開始する(ステップS107)。機器認証が失敗であれば(ステップS108のNO)、ステップS106へ戻り、圧力データを取得するまで待機する。
【0092】
認証部102による機器認証が成功であれば(ステップS108のYES)、履歴管理部106は、通信部101を介して、メモリカード300へID要求を送信する(ステップS109)。
メモリカード300の制御部307は、通信部301を介して擬似ペット100から、ID要求を受信し、情報記憶部310から、カードタイプ、カードID及び性別情報を読み出し(ステップS111)、読み出したカードタイプ、カードID及び性別情報を、通信部301を介して擬似ペット100へ送信する(ステップS112)。
【0093】
擬似ペット100の履歴管理部106は、通信部101を介して、メモリカード300から、カードタイプ、カードID、性別情報を受け取る。次に、メモリカード300及び擬似ペット100自身の記憶している履歴情報ファイルに応じて、状態遷移表の遷移確率を変更し、続いて、メモリカード300、擬似ペット100双方の有する履歴情報ファイルを更新する(ステップS113)。
【0094】
メモリカード300を所持した利用者と遊び終え、履歴情報の更新が完了すると、履歴管理部106は、状態遷移表を初期状態に戻し(ステップS114)、ステップS106へ戻る。だだし、ステップS113において、状態遷移表を変更しない場合は、ステップS114は省略する。
(2)擬似ペット100aの履歴管理部106aによる状態遷移表の変更及び履歴情報の更新
図12は、擬似ペット100aを構成する履歴管理部106aによる、状態遷移表の変更及びメモリカード300bの履歴情報の更新の動作を示すフローチャートである。以下に、図12を用いて、履歴管理部106aによる、状態遷移表の変更及びメモリカード300bの履歴情報の更新について説明する。なお、これは、擬似ペット100aの場合の、図11のステップS113の詳細である。
【0095】
メモリカード300から受信したカードタイプが「1」であれば(ステップS121の「1」)、擬似ペット100aの履歴管理部106aは、何もせずにここでの処理を終了する。
受信したカードタイプが「2」であれば(ステップS121の「2」)、履歴管理部106aは、通信部101を介して、メモリカード300bへ履歴要求を送信する(ステップS122)。
【0096】
メモリカード300bの制御部307bは、通信部301bを介して履歴要求を受信し、情報記憶部310bからカード側履歴ファイル314bを読み出す(ステップS123)。通信部301bを介して、読み出したカード側履歴ファイル314bを、擬似ペット100へ送信する(ステップS124)。
擬似ペット100aの履歴管理部106aは、通信部101を介してメモリカード300bからカード側履歴ファイルを受信する。カード側履歴ファイルを受信すると、固有情報記憶部104に記憶されている擬似ペット100a自身のペットID116を含むペット履歴表を、受信したカード側履歴ファイルにおいて検索する(ステップS126)。該当するペット履歴表を検出すると(ステップS127のYES)、検出したペット履歴表から通信回数を読み出す(ステップS128)。読み出した通信回数に1加算したものを変数pに代入する(ステップS129)。続いて、検出したペット履歴表に基づいて、各状態遷移表の遷移確率を変更する(ステップS131)。
【0097】
ステップS126の検索の結果、該当するペット履歴表が存在しなければ(ステップS127のNO)、履歴管理部106aは、変数pに「1」を代入する。(ステップS134)。次に、受信したカード側履歴ファイルと、擬似ペット100a自身の種別情報「犬」に基づいて、各状態遷移表の遷移確率を変更する(ステップS136)。
次に、履歴管理部106a及びメモリカード300bの制御部307bは、メモリカード300bの記憶しているカード側履歴情報を更新する(ステップS137)。
(3)履歴管理部106aによるペット履歴表に基づく遷移確率の変更
図13は、擬似ペット100aを構成する履歴管理部106aの、ペット履歴表に基づく遷移確率の変更の動作を示したものであり、図12のステップS131の詳細である。以下に、図13を用いて、ペット履歴表に基づく遷移確率の変更動作について説明する。
【0098】
擬似ペット100aの履歴管理部106aは、検出したペット履歴表から通信回数とJoy指数を読み出す(ステップS151)。読み出した通信回数が回数閾値「20」未満であれば(ステップS152の20未満)、次に、読み出したJoy指数と、Joy閾値「80」とを比較する(ステップS152)。Joy指数が「80」未満であれば(ステップS153のNO)、遷移確率の変更は行わない。Joy指数が「80」以上であれば(ステップS153のYES)、検出したペット履歴表から更新日時を読み出す(ステップS154)。次に、履歴管理部106aは、現在日時から更新日時を減算して無遊戯期間を算出する(ステップS156)。算出した無遊戯期間が7日未満であれば(ステップS157のYES)、履歴管理部106aは、確率調整表A 161を用いて、状態遷移表A 151〜状態遷移表Z 154の遷移確率を変更する(ステップS159)。
【0099】
無遊戯期間が7日以上であれば(ステップS157のNO)、履歴管理部106は、遷移確率の変更は行わない。
通信回数が「20」以上であれば(ステップS152の20以上)、履歴管理部106aは、読み出したJoy指数とJoy閾値「80」とを比較し(ステップS161)、「80」未満であれば(ステップS161のNO)、ステップS159へ処理を移す。読み出したJoy指数が、「80」以上であれば(ステップS161のYES)、履歴管理部106aは、確率調整表B 162を用いて状態遷移表A 151〜状態遷移表Z 154の遷移確率を変更する(ステップS162)。
(4)履歴管理部106aによるカード側履歴ファイルと種別情報に基づく遷移確率の変更
図14は、擬似ペット100aを構成する履歴管理部106aによる、カード側履歴ファイル及び擬似ペット100a自身の種別情報「犬」に基づく遷移確率の変更の動作を示したものであり、図12のステップS136の詳細である。以下に、図14を用いて、カード側履歴ファイル及び種別情報「犬」に基づく遷移確率の変更について説明する。
【0100】
履歴管理部106aは、受信したカード側履歴ファイルにおいて、固有情報記憶部104の記憶している擬似ペット100a自身の種別情報「犬」と同一の種別情報を含むペット履歴表を選択する(ステップS171)。選択したペット履歴表に含まれる通信回数を全て加算してD履歴指数を算出する(ステップS172)。
次に、履歴管理部106aは、受信したカード側履歴ファイルにおいて、種別情報「猫」を含むペット履歴表を選択し(ステップS173)、選択したペット履歴表に含まれる更新日時のうち最も新しいものを抽出し、これを猫接触時とする(ステップS176)。時間計測部114から現在時刻を取得し、取得した現在時刻から猫接触時を減算して、経過時間を算出する(ステップS177)。算出した経過時間が猫接触閾値「24時間」未満であれば(ステップS178のNO)、履歴管理部106aは、確率調整表C 163を用いて、状態遷移表A〜状態遷移表Zの遷移確率を変更する(ステップS179)。
【0101】
経過時間が、猫接触閾値「24時間」以上であれば(ステップS178のYES)、次に、履歴管理部106aは、算出したD履歴指数と種別履歴閾値「50」とを比較し(ステップS181)、D履歴指数が「50」未満であれば(ステップS181の50未満)、遷移確率の変更は行わない。
D履歴指数が「50」以上であれば(ステップS181の50以上)、履歴管理部106aは、確率調整表A 161を用いて、各状態遷移表の遷移確率を変更する(ステップS182)。
【0102】
(5)カード側履歴ファイルの更新
以下に、メモリカード300b及び擬似ペット100aによるカード側履歴ファイルの更新の動作について、図15に示すフローチャートを用いて説明する。これは、図12のステップS137の詳細である。
擬似ペット100aの履歴管理部106aは、カウンタtを「0」に初期化し(ステップS191)、時間を計測する(ステップS192)。カウンタtが送信間隔「15秒」に等しくなると(ステップS193のYES)、履歴管理部106aは、感情管理部113からJoy指数を取得し(ステップS194)、時間計測部114から現在日時を取得する(ステップS196)。次に、固有情報記憶部104から、ペットID116と種別情報117とを読み出す(ステップS197)。次に、履歴管理部106aは、通信部101を介して、ペットID116、種別情報117、現在日時、通信回数(=変数p)及びJoy指数から構成される更新情報を擬似ペット100aへ送信する(ステップS198)。
【0103】
メモリカード300bの制御部307bは、通信部301bを介して、擬似ペット100aから更新情報を受信する。制御部307bは、情報記憶部310bに記憶されているカード側履歴ファイル314bにおいて、更新情報含んで受信したペットIDと同一のペットIDを含むペット履歴表を検索する(ステップS201)。該当するペット履歴表が存在しなければ(ステップS202のNO)、受信した更新情報を基に、新たなペット履歴表を生成し、生成したペット履歴表を、カード側履歴ファイル314bに追加する(ステップS203)。
【0104】
該当するペット履歴表を検出すると(ステップS202のYES)、検出したペット履歴表の通信回数、更新日時、及びJoy指数を、受信した更新情報に含まれる通信回数、現在日時及びJoy指数によって更新する(ステップS206)。次に、制御部307bは、通信部301bを介して、正常に更新情報を受信したことを示す完了通知を、擬似ペット100aへ送信する(ステップS207)。
【0105】
擬似ペット100aの履歴管理部106aは、更新情報の送信後の時間の経過を計測し、所定時間内に、メモリカード300bから完了通知を受信すると(ステップS208のYES)、ステップS191へ戻り、ステップS191〜ステップS208の処理を繰り返す。
所定時間内に、完了通知を受信できなければ(ステップS208のNO)、メモリカード300bを所持した利用者が擬似ペット100bと遊び終えたと判断し、カード側履歴ファイルの更新処理を終了する。
【0106】
(6)擬似ペット100bの履歴管理部106bによる状態遷移表の変更及び履歴ファイルの更新
図16及び図17は、擬似ペット100bを構成する履歴管理部106bによる、状態遷移表の変更、メモリカード300b及び擬似ペット100b双方の履歴ファイルの更新の動作を示すフローチャートである。これは、擬似ペット100bの場合の、図11のステップS113の詳細である。
【0107】
以下に、図16及び図17を用いて、履歴管理部106bによる、状態遷移表の変更及び履歴情報ファイルの更新について説明する。
メモリカード300から受信したカードタイプが「1」であれば(ステップS221の「1」)、擬似ペット100bの履歴管理部106bは、情報記憶部110の記憶しているペット側履歴ファイル119内で、受信したカードIDを含むユーザ履歴表を検索する(ステップS222)。該当するユーザ履歴表が存在しなければ(ステップS223のNO)、擬似ペット100bの記憶しているペット側履歴ファイル119及び受信した性別情報に基づいて、各状態遷移表の遷移確率を変更する(ステップS226)。
【0108】
該当するユーザ履歴表を検出した場合(ステップS223のYES)、履歴管理部106bは、検出したユーザ履歴表に基づいて、各状態遷移表の遷移確率を変更する(ステップS227)。なお、ステップS227の動作は、図13を用いて説明した履歴管理部106aによるペット履歴表に基づく遷移確率の変更とほぼ同様であり、擬似ペット100a、履歴管理部106a、ペット履歴表をそれぞれ、擬似ペット100b、履歴管理部106b、ユーザ履歴表と読み替えればよいので、ここでは、説明を省略する。
【0109】
次に、履歴管理部106bは、メモリカード300aを所持した利用者が擬似ペット100bと遊び終えたか否かを判定し、遊び終えたと判断すると、ペット側履歴ファイル119を更新する(ステップS228)。
受信したカードタイプが「2」であれば(ステップS221の「2」)、履歴管理部106bは、通信部101を介して、メモリカード300bへ履歴要求を送信する(ステップS231)。
【0110】
メモリカード300bの制御部307bは、通信部301bを介して、履歴要求を受信し、情報記憶部310bから、カード側履歴ファイル314bを読み出す(ステップS232)。次に、通信部301bを介して、読み出したカード側履歴ファイル314bを、擬似ペット100bへ送信する(ステップS233)。
擬似ペット100bの履歴管理部106bは、通信部101を介して、カード側履歴ファイルを受信する。カード側履歴ファイルを受信すると、履歴管理部106bは、情報記憶部110の記憶しているペット側履歴ファイル119において、受信したカードIDを含むユーザ履歴表を検索する(ステップS236)。
【0111】
該当するユーザ履歴表が存在しなければ(ステップS237のNO)、履歴管理部106bは、変数pに1を代入する(ステップS238)、次に、受信したカード側履歴ファイルと、情報記憶部110の記憶しているペット側履歴ファイル119とに基づいて、各状態船意表の遷移確率を変更する(ステップS239)。
該当するユーザ履歴表を検出した場合(ステップS237のYES)、検出したユーザ履歴表から通信回数を読み出し(ステップS241)、読み出した通信回数に1加算したものを変数pに代入する(ステップS242)。
【0112】
次に、履歴管理部106bは、受信したカード側履歴ファイルと検出したユーザ履歴表とに基づいて、各状態遷移表の遷移確率を変更する(ステップS243)。
遷移確率の変更を終えると、履歴管理部106bは、定期的にカード側履歴ファイルを更新し(ステップS246)、続いて、ペット側履歴ファイルの更新を行う(ステップS247)。なお、ステップS246の詳細は、図15において説明したカード側履歴ファイルの更新の動作とほぼ同様であり、図15中の擬似ペット100a、履歴管理部106aを、それぞれ、擬似ペット100b、履歴管理部106bと読み替えればよいので、ここでは説明を省略する。
【0113】
また、ステップS247の詳細は、図19(詳細は後述する)のカードタイプ「1」の場合の終了の判定及びペット側履歴ファイルの更新の動作の、ステップS276〜ステップS287と同一であるので、ここでは説明を省略する。
(7)履歴管理部106bによるペット履歴ファイルと性別情報に基づく遷移確率の変更
図18は、履歴管理部106bの、ペット履歴ファイルと性別情報に基づいた遷移確率の変更の処理を示している。以下に、図18に示すフローチャートを用いて、ペット側履歴ファイルと性別情報とに基づく遷移確率の変更の動作について説明する。
【0114】
擬似ペット100bの履歴管理部106bは、情報記憶部110の記憶しているペット側履歴ファイル119において、受信した性別情報「男」を含むユーザ履歴表を選択する(ステップS261)。次に、選択したユーザ履歴表に含まれる通信回数を全て加算し、性別履歴指数を算出する(ステップS262)。
算出した性別履歴指数が、性別履歴閾値「100」以上であれば(ステップS263の100以上)、履歴管理部106bは、行動ライブラリ108から確率調整表Aを読み出し、読み出した確率調整表Aを用いて、状態遷移表A〜状態遷移表Zの遷移確率を変更する(ステップS264)。
【0115】
算出した性別履歴指数が、「100」未満であれば(ステップS263の100未満)、遷移確率の変更は行わない。
(8)カードタイプ「1」の場合の終了の判定及びペット側履歴ファイルの更新
図19は、擬似ペット100bが、カードタイプ「1」のメモリカード300aを所持した利用者と遊ぶ場合の、遊び終わりの判断と、遊び終えた時のペット側履歴ファイル119の更新の動作を示している。以下に、図19のフローチャートを用いて、擬似ペット100bの履歴管理部106bによる、終了の判定及びペット側履歴情報の更新の動作について説明する。なお、これは、図16ステップS228の詳細である。
【0116】
履歴管理部106bは、カウンタtを「0」に初期化して(ステップS271)、時間の計測を開始する(ステップS272)。ここで、頭部ユニット123に備えられた圧力センサ144aを介して、利用者の頭部ユニット123への接触を検出すると(ステップS273のYES)、ステップS271へ戻る。
ここで、頭部ユニット123への利用者の接触を検出しなければ、履歴管理部106bは、カウンタtと接触間隔「60秒」とを比較し、カウンタtが「60秒」未満であれば(ステップS274のNO)、ステップS272へ戻り時間の計測を続ける。
【0117】
カウンタtが「60秒」以上であれば、履歴管理部106bは、感情管理部113から、Joy指数を取得し(ステップS276)、時間計測部114から現在日時を取得する(ステップS277)。
受信したカードIDを含むユーザ履歴表が存在する場合は(ステップS284のYES)、現在日時及び取得したJoy指数によって、検出したユーザ履歴表の更新日時Joy指数とを更新する(ステップS284)。続いて、検出したユーザ履歴表の通信回数に1加算する(ステップS286)。
【0118】
受信したカードIDを含むユーザ履歴表が存在しない場合、新たなユーザ履歴表を生成する(ステップS281)。ここで、新たに生成するユーザ履歴表は、受信したカードIDと性別情報、取得したJoy指数と現在日時(更新日時)と、通信回数「1」を含む。次に、生成したユーザ履歴表を情報記憶部110のペット側履歴ファイルに追加する(ステップS282)。
【0119】
次に、履歴管理部106bは、カウンタtを停止させる(ステップS287)。
(9)カード側履歴情報及びペット側履歴情報に基づく遷移確率の変更
図20、図21は、メモリカード300bから受信したカードIDを含むユーザ履歴表が、擬似ペット100bが記憶しているペット側履歴ファイル119内に存在しない場合に、カード側履歴ファイルとペット側履歴ファイルとを基に、状態遷移表の遷移確率を変更する手順を示している。以下に、図20及び21のフローチャートを用いて、擬似ペット100bの履歴管理部106bによるカード側履歴ファイル及びペット側履歴ファイルに基づく遷移確率の変更の動作について説明する。なお、これは、図17のステップS239の詳細である。
【0120】
履歴管理部106bは、受信したカード側履歴ファイルから、擬似ペット100b自身の記憶している種別情報「犬」を含むペット履歴表を選択する(ステップS301)。選択したペット履歴表に含まれる通信回数を全て加算してD履歴指数を算出する(ステップS302)。
続いて、履歴管理部106bは、受信したカード側履歴ファイルにおいて、種別情報「猫」を含むペット履歴表を選択する(ステップS303)。選択したペット履歴表に含まれる更新日時のうち、最も新しいものを抽出する。これを猫接触時とする(ステップS304)。次に、時間計測部114から現在日時を取得し、取得した現在日時から猫接触時を減算して、経過時間を算出する(ステップS306)。
【0121】
続いて、履歴管理部106bは、情報記憶部110に記憶されているペット側履歴ファイル119において、受信した性別情報「男」を含むユーザ履歴表を選択する(ステップS307)。選択したユーザ履歴表に含まれる通信回数を全て加算して、性別履歴指数を算出する(ステップS308)。
算出した経過時間が、猫接触閾値「24時間」未満であれば(ステップS311のNO)、履歴管理部106bは、確率調整表C 163を用いて、状態遷移表A 151〜状態遷移表Z 154の遷移確率を変更する(ステップS312)。
【0122】
経過時間が「24時間」以上であれば(ステップS311のYES)、次に、履歴管理部106bは、算出した性別履歴指数と性別履歴閾値「100」とを比較する。性別履歴指数が「100」以上であれば、さらに、選出したD履歴指数と種別履歴閾値「50」とを比較する。算出したD履歴指数が「50」以上であれば(ステップS314の50以上)、確率遷移表B 162を用いて、各状態遷移表の遷移確率を変更する(ステップS316)。D履歴指数が、「50」未満であれば(ステップS314の50未満)、確率調整表A 161を用いて、各状態遷移表の遷移確率を変更する(ステップS317)。
【0123】
性別履歴指数が「100」未満であれば(ステップS313の100未満)、続いて、算出したD履歴指数と種別履歴閾値「50」とを比較して、D履歴指数が「50」以上であれば(ステップS319の50以上)、履歴管理部106bは、確率調整表A 161を用いて各状態遷移表の遷移確率を変更する(ステップS317)。算出したD履歴指数が「50」未満であれば(ステップS319の50未満)、履歴管理部106bは、遷移確率の変更は行わない。
【0124】
(10)カード側履歴ファイル及びユーザ履歴表に基づく遷移確率の変更
図22、図23は、ペット側履歴ファイル119内に、メモリカード300bから受信したカードIDを含むユーザ履歴表が存在する場合、カード側履歴ファイルと、受信したカードIDを含むユーザ履歴表とを基にした遷移確率の変更の処理を示している。以下に、図22、図23のフローチャートを用いて、擬似ペット100bの履歴管理部106bによる、カード側履歴ファイルとユーザ履歴表とに基づく遷移確率変更の動作について説明する。なお、これは、図17のステップS243の詳細である。
【0125】
擬似ペット100bの履歴管理部106bは、メモリカード300bから受信したカード側履歴ファイルから、種別情報「猫」を含むペット履歴表を選択する(ステップS331)。選択されたペット履歴表に含まれる更新日時のうち、最も新しいものを抽出する。これを猫接触時とする(ステップS332)。時間計測部114から、現在日時を取得し、取得した現在日時から猫接触時を減じて、経過時間を算出する(ステップS333)。
【0126】
次に、ペット側履歴ファイル119において検出した、受信したカードIDを含むユーザ履歴表から通信回数を読み出す(ステップS334)。読み出した通信回数と回数閾値「20」とを比較し、通信回数が「20」未満であれば(ステップS336の20未満)、続いて、算出した経過時間と猫接触閾値「24時間」とを比較する。経過時間が、「24時間」未満であれば(ステップS341のNO)、履歴管理部106bは、確率調整表C 163を用いて各状態遷移表の遷移確率を変更する(ステップS342)。
【0127】
経過時間が「24時間」以上であれば(ステップS341のYES)、検出したユーザ履歴表から更新日時を読み出す(ステップS343)。時間計測部114から現在日時を取得し、取得した現在日時から読み出した更新日時を減じて、無遊戯期間を算出する(ステップS344)。算出した無遊戯期間と無遊戯期間閾値「7日」とを比較し、無遊戯期間が「7日」より長ければ(ステップS346のNO)、遷移確率の変更は行わない。
【0128】
算出した無遊戯期間が「7日」以内であれば(ステップS346のYES)、履歴管理部106bは、確率調整表A 161を用いて遷移確率を変更する(ステップS347)。
読み出した通信回数が「20」以上であれば(ステップS336の20以上)、履歴管理部106bは、検出したユーザ履歴表からJoy指数を読み出す(ステップS337)。読み出したJoy指数と、Joy閾値「80」とを比較し、読み出したJoy指数が「80」未満であれば(ステップS349のNO)、ステップS347へ処理を移す。
【0129】
Joy指数が、「80」以上であれば(ステップS349のYES)、履歴管理部106bは、続いて、算出した経過時間と猫接触閾値「24時間」とを比較し、経過時間が「24時間」未満であれば(ステップS351のNO)、確率調整表D 164を用いて、核状態遷移表の遷移確率を変更する(ステップS352)。
算出した経過時間が、「24時間」以上であれば(ステップS351のYES)、履歴管理部106bは、確率調整表B 162を用いて、各状態遷移表の遷移確率を変更する(ステップS353)。
1.6 まとめ・効果
以上、説明してきたように、本発明の擬似ペットシステム1に属する擬似ペット100は、メモリカード300を所持した利用者と遊ぶ際に、メモリカード300に記憶されている情報を参照して、どのような行動を取るかを決定する。
【0130】
具体的には、擬似ペット100bは、メモリカード300から取得したカードIDによって、正確にメモリカード300にかかるユーザ履歴表を検出することができる。従来技術と比較すると、高性能な撮像システム、解析システムを備えることなく、簡単かつ正確に、ユーザ履歴表を選択することができる。
また、擬似ペット100は、擬似ペット100自身とメモリカード300を所持した利用者とが過去に遊んだ履歴だけでなく、利用者が、他の擬似ペットと遊んだ履歴、擬似ペット100自身が、他の利用者と遊んだ履歴も参照して、行動パターンを変更する。
【0131】
この結果、擬似ペット100aは、メモリカード300bの記憶しているカード側履歴ファイルに、擬似ペット100a自身と対応する履歴表が存在しない場合、メモリカード300bの所有者が、他の擬似ペットと遊んだペット履歴表を基に、例えば、擬似ペット100aとは、種類の異なるネコ型の擬似ペットとつい先ほどまで、遊んでいた場合には、警戒的な態度を取る。これは、猫の臭いが付着したままでは、なかなか犬がなついてくれない状態を、再現している。また、自身と同種類の犬型の擬似ペットと、何度も遊んだ事のある利用者には、初対面であっても、親密な態度をとる。これは、初対面であっても、犬の扱い方に慣れている人には、犬が容易になつく状態を再現している。
【0132】
擬似ペット100bは、メモリカード300aと対応するユーザ履歴表が存在しない場合、他のメモリカードを有した利用者と遊んだ際のユーザ履歴表を基に、例えば、メモリカード300aに記録されている性別情報「男」と同一の性別情報を有するメモリカードを所持した利用者と何度も遊んだことがあれば、初対面であっても、利用者に対して親密な行動を取る。これは、男性に接する機会の多い犬は、男性になつきやすく、女性に接する機会の多い犬は、女性になつきやすいことを再現している。
【0133】
さらに、擬似ペット100bは、自身の記憶しているペット側履歴ファイルとメモリカード300bの記憶しているカード側履歴ファイルとを用いて、過去に何度も遊んだ人で、かつ、その時に楽しいと感じていた人であっても、ネコ型の擬似ペットと遊んだ直後には、親密だが不機嫌な行動をとる。つまり、これは、普段良くなついている飼い犬であっても、他の動物と接触し、その動物の臭いなどが残っている状態では、わざとすねた態度をして、やきもちを焼いていることを再現している。
【0134】
このように、本発明の擬似ペット100は、今現在、遊んでいる擬似ペットと利用者間の履歴情報だけでなく、利用者のほかの擬似ペットとの接触履歴や、擬似ペットの他の利用者との接触履歴を用いることで、より現実に近いペットの行動を再現することができので、より高い満足感、親近感を利用者に与えることができる。
2.変形例
以上、実施の形態1に基づいて説明してきたが、本発明について、本発明はこれに限定されるものではなく、以下のような場合も含む。
【0135】
(1)実施の形態1では、行動ライブラリ108は、4個の確率調整表を記憶しており、履歴管理部106は、これらのうち何れかを用いて、状態遷移表A 151〜状態遷移表Z 154の遷移確率を変更するが、確率調整表に替えて、確率調整表Aを用いて、各状態遷移表の遷移確率を変更して生成された状態遷移表Aa〜状態遷移表Za、確率調整表Bを用いて、遷移確率を増減して生成された状態遷移表Ab〜状態遷移表Zb、確率調整表Cを用いて、各状態遷移表の遷移確率を増減して生成された状態遷移表Ac〜状態遷移表Zc、確率調整表Dを用いて、各状態遷移表の遷移確率を増減して生成された状態遷移表Ad〜状態遷移表Zdを記憶していてもよい。
【0136】
履歴管理部106は、実施の形態1において、確率調整表Aを用いて、状態遷移表A〜状態遷移表Zの遷移確率を変更する代わりに、行動制御部107へ、使用する状態遷移表を状態遷移表Aa〜状態遷移表Zaに変更することを指示する。
確率調整表B〜確率調整表Dを用いて各状態遷移表を変更する場合においても、同様に、状態遷移表の変更を指示する。
【0137】
このようにすることで、メモリカードと通信をするたびに、各状態遷移表の遷移確率を計算する必要がなくなり、迅速に、擬似ペット100の行動を、メモリカードを保持する利用者に対応したものに変更することができる。
(2)メモリカード300から受信したカードIDと対応するユーザ履歴表が存在しない場合、擬似ペット100bの履歴管理部106bは、情報記憶部110に記憶されているペット側履歴ファイルと、受信した性別情報とに基づいて、確率調整表を選択しているが、受信したカードIDと対応するユーザ履歴表の有無に関わらず、単に受信した性別情報によって、いずれかの確率調整表を選択してもよい。
【0138】
また、行動ライブラリ108は、性別情報と一意に対応する確率調整表を記憶しており、受信したカードIDと対応するユーザ履歴表が存在しない場合、履歴管理部106bは、受信した性別情報と対応する確率調整表を用いて、遷移確率を変更する。
例えば、性別情報「女」と対応する確率調整表Eと、性別情報「男」と対応する確率調整表Fを記憶しており、確率調整表Eを用いて、遷移確率を変更すると、擬似ペット100bは、「体を摺り寄せる」、「甘えた声を出す」、「ゆっくり歩く」といった動作をする確率が高くなり、「大きな声で鳴く」、「ジャンプする」といった激しい動作をする確率が低くなり、全体として、穏やかな行動をとる。確率調整表Fを用いて、遷移確率を変更すると、「すばやく走る」、「高くジャンプする」といった動作をする確率が高くなり、全体として、活発な動作をとる。
【0139】
さらに、カードIDと1対1に対応する確率調整表を保持しており、受信したカードIDのみにより、確率調整表を選択するとしても良い。この場合、行動ライブラリ108は、カードID及び確率調整表を対応付けて記憶している。また、各確率調整表が、その先頭部分に対応するカードIDを含んでいても良い。
(3)メモリカード300は、メモリカード300の所有者の性別を示す性別情報を記憶しているが、これにかぎらず、年齢、世代、国籍といった、利用者の属性情報を記憶していても良い。また、姓、利用者の個人的好みを示す情報(大人しいペットを好む、活発なペットを好む)を含んでいても良い。
【0140】
さらに、変形例(2)のように、擬似ペット100は、それぞれの属性情報に応じた確率調整表を記憶していても良い。
(4)擬似ペット100aにおいて、受信したカード側履歴ファイルに、擬似ペット100a自身のペットIDを含むペット履歴表が存在する場合、履歴管理部106aは、自身のペットIDと対応するペット履歴表のみを用いて、確率調整表を選択しているが、その他のペット履歴表を用いるようにしてもよい。
【0141】
例えば、擬似ペット100bの履歴管理部106bと同様にして、猫接触時を算出し、何度も遊んだことがあり、仲の良い利用者であっても、擬似ペット100aとは異なる種類のロボットと遊んだ直後は、不機嫌な行動をとるように制御する。
(5)メモリカード300bは、履歴要求を受信すると、自身の記憶しているカード側履歴ファイルを送信するが、擬似ペット100からペットIDを取得し、取得したペットIDと対応するペット履歴表を送信しても良い。
【0142】
(6)擬似ペット100bの備える情報記憶部110は、着脱可能な記録媒体であってもよい。このようにすれば、例えば、故障や、新しいバージョンの擬似ペットが発売により、擬似ペット本体を買い換えても、メモリカードを新しい擬似ペットに装着することで、新しい擬似ペットは古い擬似ペットと同様の行動をとる。従って、利用者は、新しい擬似ペットに対しても、より愛着を感じることができる。
【0143】
(7)上記の実施の携帯1及び変形例においては、犬型の擬似ペットとネコ型の擬似ペットのみを想定し、種別情報「犬」の擬似ペットと種別情報「猫」の擬似ペットは仲が良くないものとして説明してきた。しかし、擬似ペットの種類は、これらに限るものではなく、他の動物を模したものが存在しても良い。また、同種の擬似ペットにおいても、さらに、ダックスフンド型、チワワ型、アメリカンショートヘア型、シャム猫型など、様々な種類の擬似ペットが存在しても良い。
【0144】
この場合、擬似ペットは、予め、仲の良い種類又は仲の悪い種類を示す種類識別子を記憶しておく。上記の実施の形態では、擬似ペット100a及び100bは、利用者が、自身の種別情報「犬」と同種の種別情報を有する擬似ペットと遊んだ合計回数が50回以上であれば、初対面の人であっても親密な行動をとり、自身の種別情報「犬」と異なる種別情報「猫」を有する擬似ペットと遊んでからの経過時間が24時間未満であると、警戒的な行動をとる。本変形例では、これに替わって、予め記憶している、仲の良い種類識別子を有する擬似ペットと遊んだ合計回数が50回以上であれば、親密な行動を取り、仲の悪い種類識別子を有する擬似ペットと遊んでからの経過時間が24時間未満であれば、警戒的な行動を取る。
【0145】
(8)種別情報に加えてシリーズ番号、バージョン番号を記憶していても良い。シリーズ番号は、擬似ペットが製造された製造メーカおよび、同一のコンセプトの下に製作されたことを識別する番号であり、バージョン番号は、擬似ペットの開発された時期や世代を示すものである。この場合、擬似ペット100は、初対面の人であっても、自身のシリーズ番号と同一のシリーズ番号を有する擬似ペットと遊んだことがある人であれば、親密な行動をとる。さらに、自身のバージョン番号と同一のバージョン番号を有する擬似ペットと遊んだことがある人であれば、非常に親密な行動を取る。
【0146】
(9)本発明の擬似ペット100において、受信したカード側履歴ファイルから算出されるD履歴指数が一定未満である場合、擬似ペット100の機能や取り扱い方法について、利用者に通知しても良い。例えば、赤色のランプを点灯し、「赤いランプが点灯している時は、怒っています」という、説明の音声を再生する。尻尾ユニット122を左右に動作させ、「うれしいことを表現する時は、しっぽを振ります」という、説明の音声を再生する。
【0147】
また、算出したD履歴指数の値に応じて、段階的に、取り扱いや機能の説明を簡略化しても良い。
また、変形例(8)において、説明したように、各擬似ペットがシリーズ番号や、バージョン番号を記憶している場合、カード側履歴ファイルを構成する各ペット履歴表には、種別情報に加えて、シリーズ番号及びバージョン番号が含まれる。
【0148】
この場合、カード側履歴ファイルを構成するペット履歴表のうち、擬似ペット100と同一のシリーズ番号とバージョン番号を含むものが存在しなければ、擬似ペット100の機能及び取り扱い説明を通知する。
シリーズ番号は同じであるが、バージョン番号の異なるペット履歴表が存在する場合、履歴表に含まれるバージョン番号の擬似ペットとの差異点の説明のみを通知する。
【0149】
同一のシリーズ番号とバージョン番号を含むものが存在すれば、説明の通知は行わない。
(10)また、ここまで本発明は擬似ペットであるとして説明してきたが、これに限るものではなく、介護ロボット、工業用ロボットであっても良い。さらに、一般の電気機器であっても良い。
【0150】
機器を操作しようとする利用者の所持するメモリカードから、カード側履歴ファイルを取得し、取得したカード側履歴ファイルをもとに、利用者が、この機器又はこの機器と同種類の機器の操作経験がどの程度あるかを判断し、初心者には、変形例(9)において説明したような、機能及び取り扱いに関する説明を行い、習熟者に対しては、説明を省略する。
【0151】
さらに、操作経験の程度に応じた確率調整表を備えており、利用者の操作経験に応じた動作をするようにしてもよい。介護ロボットや工業用ロボットを例にすると、初心者が使用する場合には、全体として動作速度を遅くする、動作と動作の間に間隔をあける、次に操作すべきボタンやレバーなどを音声通知するというように、初心者向けの行動をする。習熟者が利用する場合には、全体として、動作速度を早くし、迅速に動作するというように、習熟者向けの行動をとる。
【0152】
(11)上記の実施の形態では、擬似ペット100は、4種類の確率調整表を記憶しているが、これに替わって、関数を用いて遷移確率を変更しても良い。
(12)また、上記の実施の形態において説明したペット履歴表、ユーザ履歴表を構成する情報は、一例であり、これに限るものではない。
例えば、利用者と擬似ペット100が遊ぶ際に時間の経過を計測し、計測した時間を累積した累積遊戯時間を含んでいても良いし、Joy指数に替わって、遊び終わりの時点のJoy指数を、累積した累積Joy指数であっても良い。
【0153】
また、カード側履歴ファイル及びペット側履歴ファイルの構成もこれに限ったものではない。例えば、1回の通信の度に、1個の履歴表を生成し、これを蓄積しても良い。
(13)上記の実施の形態では、利用者は、少なくともカードIDの記憶された非接触ICカードを保持して、擬似ペット100と遊ぶが、必ずしも非接触ICカードである必要はない。例えば、接触型のICカードであって、利用者は、擬似ペット100と遊ぶ際に、擬似ペット100にICカードを装着し、遊び終わる時に、装着しているメモリカードを取り外す。メモリカードに限らず、他の記録媒体であっても良い。
【0154】
また、有線で擬似ペット100と接続される記録媒体であっても良いし、携帯電話やPDAなどに装着可能な記録媒体であって、装着母体となる機器の通信機能を利用して、擬似ペット100と通信しても良い。
(14)また、記憶機能と通信機能と電源と簡易なボタン操作部を備えた記録機器であっても良い。この場合、利用者のボタン操作によって、記録機器の側から機器認証を開始する。
【0155】
また、複数の利用者により共有される記録機器であってもよい。この場合、利用者は、記録機器を利用する前に、利用者毎に割り当てられた、ユーザIDを入力する。記録機器は、カードIDに替わって、ユーザIDを擬似ペット100へ送信する。擬似ペット100bの記憶しているユーザ履歴表は、カードIDに替わって、ユーザIDを含んで構成される。また、記録機器が、メモリカード300bのように、履歴情報を書き込み可能である場合、ユーザIDと対応した複数のカード側履歴ファイルを記憶しており、履歴要求を受信すると、入力されたユーザIDと対応するカード側履歴ファイルを送信する。
【0156】
また、ここで通信機能とは、無線通信に限るものではなく、有線で擬似ペット100と接続されていても良い。
(15)実施の形態1において、擬似ペット100bは、頭部ユニットの圧力センサ144aからの入力の間隔が、接触間隔「60秒」以上である場合、メモリカード300aを所持する利用者が擬似ペット100aと遊び終わったと判断している。しかし、これに替わって、通信可能であることを確認する通信確認情報を出力し、これに対する応答をメモリカードから受信できない場合、遊び終わったと判断しても良い。
【0157】
(16)また、本発明において、前記ヒント出力装置は、前記装置ヒント情報として、前記ヒント出力装置に固有の装置識別情報を記憶しており、前記複数の制御情報のうち、少なくともひとつは前記装置識別情報を含み、前記取得手段は、前記ヒント出力装置から前記装置識別情報を取得し、前記選択手段は、前記取得手段によって取得された前記装置識別情報を含む制御情報を選択することを特徴とするロボット。
【0158】
従来技術によると、顔認識や音声認識により、利用者を識別し、識別した利用者に応じて行動パターン選択するペットロボットが、開示されているが、精度の高い識別を行うためには、高性能の撮像システムや解析システムを備える必要がある。本発明の構成では、前記選択手段は、前記装置識別情報と対応する制御情報を選択し、前記ロボットは、前記装置識別情報と対応する行動をする。従って、従来技術と比較すると、本発明では、高性能の撮像システムや解析システムを備えることなく適切な制御情報を選択することができる。
【0159】
(17)前記ヒント出力装置は、前記装置ヒント情報として、前記ヒント出力装置を保持する利用者に関する利用者情報を記憶しており、本発明のロボットにおいて、前記複数の制御情報のうち、少なくともひとつが前記利用者情報を含み、前記取得手段は、前記ヒント出力装置から前記利用者情報を取得し、前記選択手段は、前記取得手段によって取得された前記利用者情報を含む制御情報を選択することを特徴とする。
【0160】
この構成によると、前記複数の制御情報のうち、少なくともひとつが前記利用者情報を含んでいるので、前記選択手段は、前記利用者情報により、迅速かつ正確に、適切な制御情報を選択することができる。
(18)また、前記ヒント出力装置は、前記ヒント出力装置と当該ロボットとの過去のコンタクトを示すコンタクト情報を、前記装置ヒント情報として記憶しており、前記ロボットを構成する前記取得手段は、前記ヒント出力装置から、前記コンタクト情報を取得し、前記選択手段は、取得された前記コンタクト情報に基づいて、制御情報を選択することを特徴とする。
【0161】
この構成によると、本発明のロボットは、前記ヒント出力装置と本発明のロボットが過去にコンタクトを取った際のコンタクト情報を反映した行動をすることができる。
(19)また、本発明のロボットにおいて、前記コンタクト情報は、前記ヒント出力装置が当該ロボットと過去にコンタクトを取ったコンタクト回数であり、前記複数の制御情報は、それぞれ、コンタクト回数の範囲と対応しており、前記取得手段は、前記ヒント出力装置から、前記コンタクト回数を取得し、前記選択手段は、取得した前記コンタクト回数の含まれる範囲と対応する制御情報を選択することを特徴とする。
【0162】
この構成では、前記選択手段は取得した前記コンタクト回数が、各制御情報と対応するコンタクト回数の範囲に含まれるか否かによって、簡単かつ迅速に制御情報を選択することができる。また、本発明のロボットは、コンタクト回数に応じて、適切な行動を選択することができる。
(20)前記コンタクト情報は、前記ヒント出力装置が当該ロボットとコンタクトを取った最も新しい時を示すコンタクト日時であり、前記複数の制御情報は、それぞれ、前記コンタクト日時からの経過時間の範囲と対応しており、本発明のロボットを構成する前記取得手段は、前記ヒント出力装置から、前記コンタクト日時を取得し、前記選択手段は、取得した前記コンタクト日時からの経過時間を算出し、算出した経過時間を含む範囲と対応する制御情報を選択することを特徴とする。
【0163】
この構成によると、前記選択手段は、経過時間に応じて、適切な制御情報を選択するので、前記ロボットは、適切な行動をすることができる。
(21)また、前記コンタクト情報は、前記ヒント出力装置が当該ロボットとコンタクトをとった際に、外的要因及び内的要因により当該ロボットに生じる擬似的な感情を示す感情指数であり、前記ロボットにおいて、前記複数の制御情報は、それぞれ、感情指数の範囲と対応しており、前記取得手段は、前記ヒント出力装置から、前記感情指数を取得し、前記選択手段は、取得した前記感情指数を含む範囲と対応する制御情報を選択することを特徴とする。
【0164】
この構成によると、前記選択手段は、前記感情指数に応じて、適切な制御情報を選択するので、本発明のロボットは、過去に前記ヒント出力装置とコンタクトを取った際に当該ロボットに生じた感情指数を反映した行動をすることができる。
(22)また、前記ロボットは、さらに、前記ヒント出力装置と当該ロボットとのコンタクト中において、当該コンタクトを示す最新コンタクト情報を、前記ヒント出力装置へ定期的に送信する送信手段を備え、前記ヒント出力装置は、前記最新コンタクト情報を受信し、受信した最新コンタクト情報により前記コンタクト情報を更新することを特徴とする。
【0165】
この構成では、前記送信手段は、前記最新コンタクト情報を前記ヒント出力装置に送信し、前記ヒント出力装置は前記最新コンタクト情報により、前記コンタクト情報を更新する。従って、次に、前記ヒント出力装置と前記ロボットとがコンタクトを取る際に、前記ロボットの前記取得手段が、更新された前記コンタクト情報を取得すると仮定すると、今現在の、ロボットと利用者とのコンタクトを次回のコンタクトに反映することができる。
【0166】
(23)また、前記ヒント出力装置は、前記ヒント出力装置と他のロボットとのコンタクトを示すコンタクト情報を、前記装置ヒント情報として記憶しており、前記ロボットを構成する前記取得手段は、前記ヒント出力装置から、前記コンタクト情報を取得し、前記選択手段は、取得した前記コンタクト情報の示す前記他のロボットとの前記コンタクトに応じて、制御情報を選択することを特徴とする。
【0167】
この構成によると、前記選択手段は、前記コンタクト情報により適切な制御情報を選択するため、本発明のロボットは、前記コンタクト情報に応じた適切な行動をすることができる。
(24)前記コンタクト情報は、前記他のロボットの種別を示す他の属性情報を含んでおり、本発明のロボットにおいて、前記選択手段は、予め、当該ロボットの種別を示す属性情報を保持しており、前記取得手段の取得した前記他の属性情報と保持している属性情報とが一致するか否かによって、制御情報を選択することを特徴とする。
【0168】
この構成によると、前記選択手段は、前記ロボットと同じ種別のロボットとコンタクトをとったことがある場合と、ない場合、でそれぞれの場合に応じて、適切な制御情報を選択することができる。
(25)前記ヒント出力装置は、前記ヒント出力装置が過去にコンタクトを取ったコンタクト済みロボットの種別を示す属性情報と、コンタクト回数とを、前記装置ヒント情報として記憶しており、本発明のロボットにおいて、前記記憶手段の記憶している制御情報のうち一つは、当該ロボットの機能及び取り扱い方法を利用者に通知する行動を定義する説明制御情報であり、前記選択手段は、予め、当該ロボットの種別を示す属性情報と、所定の閾値とを記憶しており、取得した前記装置ヒント情報が、当該ロボットと同一の種別のロボットとのコンタクト回数が前記所定の閾値未満であることを示していれば、前記説明制御情報を選択することを特徴とする。
【0169】
この構成では、前記装置ヒント情報が、前記ロボットと同一の種別のロボットとのコンタクト回数が所定の閾値未満であれることを示していれば、前記ロボットは、当該ロボットの機能及び取り扱いを利用者に通知する行動を行う。これにより、本発明のロボットは、前記ヒント出力装置を保持する利用者が、当該ロボットと同種のロボットの取り扱いに慣れていない場合、当該ロボットの機能及び取り扱いを通知し、初心者は、説明書などを用意する必要なく、簡単に、当該ロボットの取り扱い方を知ることができる。また、当該ロボットに不慣れな利用者に対して、予め、取り扱いについて説明することで、誤使用による故障を回避することができる。
【0170】
(26)前記装置ヒント情報は、前記ヒント出力装置に固有の装置識別情報であり、前記ロボットは、さらに、前記ヒント出力装置と当該ロボットとのコンタクトを示すコンタクト情報を、前記装置識別情報と対応して記憶しているコンタクト情報記憶手段を備え、前記選択手段は、前記取得手段の取得した前記装置識別情報と対応する前記コンタクト情報を、前記コンタクト情報記憶手段から読み出し、読み出した前記コンタクト情報によって、制御情報を選択することを特徴とする。
【0171】
この構成では、前記ロボットが、前記ヒント出力装置を保持する利用者と当該ロボットとのコンタクトを示す前記コンタクト情報を記憶しているコンタクト記憶手段を備える。従って、前記ヒント出力装置が読み出し専用の装置であり、新たな情報を書き込むことができないとしても、前記ロボットは、前記コンタクト記憶手段に前記コンタクト情報を記憶させ、前記コンタクト情報を反映した行動をすることができる。
【0172】
(27)前記コンタクト情報記憶手段は、前記ヒント出力装置が当該ロボットと過去にコンタクトを取ったコンタクト回数を、前記コンタクト情報として記憶しており、本発明のロボットにおいて、前記複数の制御情報は、それぞれ、コンタクト回数の範囲と対応しており、前記選択手段は、前記コンタクト情報記憶手段から前記コンタクト回数を読み出し、読み出した前記コンタクト回数を含む範囲と対応する制御情報を選択することを特徴とする。
【0173】
この構成では、前記選択手段は取得した前記コンタクト回数が、各制御情報と対応するコンタクト回数の範囲に含まれるか否かによって、簡単かつ迅速に制御情報を選択することができる。また、本発明のロボットは、前記コンタクト回数応じて、適切な行動をすることができる。
(28)また、本発明のロボットを構成する前記コンタクト情報記憶部手段は、前記ヒント出力装置と当該ロボットとの最新のコンタクト日時を、前記コンタクト情報として記憶しており、前記複数の制御情報は、それぞれ、前記コンタクト日時からの経過時間の範囲と対応しており、前記選択手段は、前記コンタクト情報記憶手段から前記コンタクト日時を読み出し、読み出した前記コンタクト日時からの経過時間を算出し、算出した経過時間を含む範囲と対応する制御情報を選択することを特徴とする。
【0174】
この構成では、前記選択手段は取得した前記経過時間によって、適切な制御情報を選択し、本発明のロボットは、経過時間に応じた、適切な行動を取ることができる。
(29)また、本発明のロボットを構成する前記コンタクト情報記憶手段は、前記ヒント出力装置が当該ロボットとコンタクトをとった際に、外的要因及び内的要因により当該ロボットに生じる擬似的な感情を示す感情指数を、前記コンタクト情報として記憶しており、前記複数の制御情報は、それぞれ、感情指数の範囲と対応しており、前記選択手段は、前記コンタクト情報記憶手段から前記感情指数を読み出し、読み出した前記感情指数を含む範囲と対応する制御情報を選択することを特徴とする。
【0175】
この構成によると、前記ロボットは、過去に前記ヒント出力装置とコンタクトを取った際に当該ロボットに生じた感情指数を反映して、適切な行動をすることができる。
(30)また、本発明において、前記ヒント出力装置の記憶している前記装置ヒント情報は、前記ヒント出力装置に固有の装置識別情報を含み、前記ロボットは、さらに、当該ロボットと他のヒント出力装置とのコンタクトを示すコンタクト情報を、前記他のヒント識別装置に固有の他の装置識別情報と対応して記憶しているコンタクト情報記憶手段を備え、前記選択手段は、取得した前記装置識別情報と前記他の装置識別情報とが一致しない場合、前記コンタクト情報に基づいて、制御情報を選択することを特徴とする。
【0176】
この構成によると、前記コンタクト情報記憶手段は、前記コンタクト情報を前記他のヒント出力装置に固有の他の装置識別情報と対応して記憶しているため、前記選択手段は、取得した前記装置識別情報と前記他の装置識別情報とを比較することで、前記選択に前記コンタクト情報を用いるか否かを簡単かつ正確に判別することができる。
(31)本発明において、前記装置ヒント情報は、前記装置識別情報に加えて、前記ヒント出力装置を保持する利用者に関する利用者情報を含み、前記コンタクト情報は、前記他のヒント出力装置を保持する利用者に係る他の利用者情報を含み、前記ロボットを構成する前記選択手段は、前記取得手段の取得した前記利用者情報と、前記コンタクト情報に含まれる前記他の利用者情報とが一致するか否かによって、制御情報を選択することを特徴とする。
【0177】
この構成によると、前記選択手段は、前記取得手段の取得した前記利用者情報と、前記コンタクト情報に含まれる前記他の利用者情報とが一致するか否かによって、適切な制御情報を選択することができる。
(32)本発明のロボットは、さらに、前記ヒント出力装置と当該ロボットとのコンタクトの終了を判断する終了判断手段を備え、前記駆動制御手段は、前記選択手段による選択から、前記終了判断手段によって終了と判断されるまでの間、前記選択された制御情報を用いて、前記駆動部を駆動制御することを特徴とする。
【0178】
この構成によると、本発明のロボットは、前記選択手段による選択から、前記終了判断手段によって終了と判断されるまでの間、前記装置ヒント情報の示唆する行動をする。このようにすることで、前記ヒント出力装置が前記ロボットとコンタクトを取っている間に、前記取得手段が、他のヒント出力手段から出力される他の装置ヒント情報を取得したとしても、前記判断手段が終了を判断するまでの間は、前記ロボットは、前記ヒント出力装置から取得した装置ヒント情報の示唆する行動を取り続ける。従って、前記終了判断手段によって終了と判断されるまでの間、前記ヒント出力装置を保持する利用者を満足させるような行動を取り続ける。
【0179】
(33)本発明のロボットを構成する前記終了判断手段は、前記ヒント出力装置へ、通信可能であることを確認する通信確認情報を出力する出力部と、前記通信確認情報を正常に受信したことを示す受信応答を、前記ヒント出力装置から取得する応答取得部と、前記応答取得手段により、前記受信応答が正常に取得されなかった場合に、前記ヒント出力装置と当該ロボットとのコンタクトが終了したと判断する判断部とを含むことを特徴とする。
【0180】
この構成では、前記終了判断手段は、前記通信確認情報を出力し、前記受信応答を正常に受信できなかった場合に終了したと判断するため、正確に前記終了を判断することができる。
(34)本発明のロボットを構成する前記終了判断手段は、外部からの入力情報を取得する取得部と、入力情報を取得してからの時間の経過を計測する計測部と、1の入力情報が取得されてから、一定時間内に、次の入力情報が取得されない場合、前記ヒント出力装置と当該ロボットとのコンタクトが終了したと決定する決定部とを含むことを特徴とする。
【0181】
前記判断部は、1の入力情報が取得されてから、一定時間内に、次の入力情報が取得されない場合、前記ヒント出力装置と当該ロボットとのコンタクトが終了したと判断する。前記ヒント出力装置を保持した利用者が前記ロボット利用する際には、利用者が、当該ロボットに声をかけたり、ロボットに触ったりすると考えられる。従って、前記取得部が、前記入力情報として音声や圧力を初めとする利用者の働きかけを検出すると想定した場合、利用者の働きかけが検出されない状態が一定時間以上継続した場合、前記コンタクトが終了したと、正確に判断することができる。また、利用者が当該ロボットの利用を終えるときを、前記コンタクトの終了と判断するため、前記利用者が、当該ロボットを使用している間中、前記利用者を満足させ続けることができる。
【0182】
(35)本発明のロボットを構成する前記駆動制御手段は、予め、有限確率オートマトンに基づく複数の状態遷移表を保持しており、前記選択手段による選択の後は、前記複数の状態遷移表及び選択された制御情報を用いて、前記駆動制御を行う。前記複数の状態遷移表は、各状態遷移表の対応するノードから他のノードへの遷移確率から構成されており、前記記憶手段の記憶している各制御情報は、それぞれ、各状態遷移表を構成する遷移確率の増減量を定義するものであり、前記駆動制御手段は、選択された制御情報の定義する増減量に従って、各状態遷移表を構成する遷移確率を増加及び減少させ、増加及び減少後の状態遷移表を用いて、前記駆動制御を行うことを特徴とする。
【0183】
この構成では、前記駆動制御手段は、選択された制御情報の定義する増減量に従って、各状態遷移表を構成する遷移確率を増加及び減少させるだけで、容易に、前記ヒント情報の示唆する行動を当該ロボットが行うように、各駆動部を駆動制御することができる。
(36)本発明は、自律的に複数の行動をするロボットとコンタクトを取るヒント出力装置であって、前記ロボットの複数の行動のうちいずれかを示唆する装置ヒント情報を記憶しているヒント記憶手段と、前記装置ヒント情報を前記記憶手段から読み出し、前記ロボットへ出力する出力手段とを備えることを特徴とする。
【0184】
この構成によると、前記ヒント出力装置は、前記ロボットの複数の行動のうちいずれかを示唆する装置ヒント情報を前記ロボットへ出力し、前記ロボットは詳細な指示を受けなくても、前記装置ヒント情報を基に、利用者を満足させるような行動を取る。従って、利用者は、前記ロボットとコンタクトを取る際に、前記ヒント出力装置を、所持しておくだけで、前記ロボットに所望の行動をとらせることができる。
【0185】
(37)本発明の前記ヒント出力装置において、前記記憶手段は、当該ヒント出力装置と前記ロボットとの過去のコンタクトを示すコンタクト情報を、前記ヒント情報として記憶しており、前記ロボットは、前記ヒント出力装置と当該ロボットとのコンタクト中において、当該コンタクトを示す最新コンタクト情報と前記コンタクト情報の更新指示を、前記ヒント出力装置へ出力し、前記ヒント出力装置は、さらに、前記最新コンタクト情報と前記更新指示とを取得する取得手段と、前記更新指示に従って、前記最新コンタクト情報を用いて、前記装置ヒント情報を更新する更新手段とを備えることを特徴とする。
【0186】
この構成では、前記取得手段は、前記最新コンタクト情報を取得し、前記更新手段は、前記コンタクト情報を更新する。従って、前記ヒント出力装置が、次にロボットとコンタクトを取る際に、前記出力手段が、更新された前記コンタクト情報を出力すると仮定すると、前記ヒント出力装置は、今現在の、前記ロボットとのコンタクトを、次回のロボットとのコンタクトに反映させることができる。
【0187】
(38)上記実施の形態1及び変形例の各装置は、具体的には、マイクロプロセッサ、ROM、RAM、ハードディスクユニット、ディスプレイユニット、キーボード、マウスなどから構成されるコンピュータシステムである。前記RAM又は前記ハードディスクユニットには、コンピュータプログラムが記憶されている。前記マイクロプロセッサが、前記コンピュータプログラムに従って動作することにより、各装置は、その機能を達成する。ここで、コンピュータプログラムは、所定の機能を達成するために、コンピュータに対する指令を示す命令コードが複数個組み合わされて構成されたものである。
【0188】
(39)上記実施の形態1及び変形例の各装置を構成する構成要素の一部又は全部は、1個のシステムLSI(Large Scale Integration:大規模集積回路)から構成されているとしてもよい。システムLSIは、複数の構成部を1個のチップ上に集積して製造された超多機能LSIであり、具体的には、マイクロプロセッサ、ROM、RAMなどを含んで構成されるコンピュータシステムである。前記RAMには、コンピュータプログラムが記憶されている。前記マイクロプロセッサが、前記コンピュータプログラムに従って動作することにより、システムLSIは、その機能を達成する。
【0189】
(40)上記実施の形態1及び変形例の各装置を構成する構成要素の一部又は全部は、各装置に脱着可能なICカード又は単体のモジュールから構成されているとしてもよい。前記ICカード又は前記モジュールは、マイクロプロセッサ、ROM、RAM、などから構成されるコンピュータシステムである。前記ICカード又は前記モジュールは、上記の超多機能LSIを含むとしてもよい。マイクロプロセッサが、コンピュータプログラムに従って動作することにより、前記ICカード又は前記モジュールは、その機能を達成する。このICカード又はこのモジュールは、耐タンパ性を有するとしてもよい。
【0190】
(41)本発明は、上記に示す方法であるとしてもよい。また、これらの方法をコンピュータにより実現するコンピュータプログラムであるとしてもよいし、前記コンピュータプログラムからなるデジタル信号であるとしてもよい。
また、本発明は、前記コンピュータプログラム又は前記デジタル信号をコンピュータ読み取り可能な記録媒体、例えば、フレキシブルディスク、ハードディスク、CD−ROM、MO、DVD、DVD−ROM、DVD−RAM、BD(Blu−ray Disc)、半導体メモリなど、に記録したものとしてもよい。また、これらの記録媒体に記録されている前記コンピュータプログラム又は前記デジタル信号であるとしてもよい。
【0191】
また、本発明は、前記コンピュータプログラム又は前記デジタル信号を、電気通信回線、無線又は有線通信回線、インターネットを代表とするネットワーク、データ放送等を経由して伝送するものとしてもよい。
また、本発明は、マイクロプロセッサとメモリとを備えたコンピュータシステムであって、前記メモリは、上記コンピュータプログラムを記憶しており、前記マイクロプロセッサは、前記コンピュータプログラムに従って動作するとしてもよい。
【0192】
また、前記プログラム又は前記デジタル信号を前記記録媒体に記録して移送することにより、又は前記プログラム又は前記デジタル信号を前記ネットワーク等を経由して移送することにより、独立した他のコンピュータシステムにより実施するとしてもよい。
(42)上記実施の形態及び上記変形例をそれぞれ組み合わせるとしてもよい。
【産業上の利用可能性】
【0193】
本発明は、ペットロボットを初めとする各種のロボット及び各種の電気機器を製造、販売する産業や、これらの機器用のソフトウェアを開発、販売する産業、これらの機器と供に用いられる記録機器を製造、販売する産業、これらのロボット及び電気機器を用いて、製品の製造、アミューズメントを初めとする各種のサービスを提供する産業において、経営的に、また継続的かつ反覆的に利用することができる。
【特許請求の範囲】
【請求項1】
利用者とコンタクトを取りつつ、自律的に行動するロボットであって、
駆動部と、
当該ロボットの複数の行動をそれぞれ定義する複数の制御情報を記憶している記憶手段と、
ロボットに行動のヒントを与えるヒント出力装置から、前記複数の行動のうちいずれかを示唆する装置ヒント情報を取得する取得手段と、
取得した装置ヒント情報により示唆される行動を定義する制御情報を前記記憶手段から選択する選択手段と、
選択された制御情報により定義された行動を当該ロボットがするように、選択された制御情報に基づいて、前記駆動部を駆動制御する駆動制御手段と
を備えることを特徴とするロボット。
【請求項2】
前記ヒント出力装置は、前記装置ヒント情報として、前記ヒント出力装置に固有の装置識別情報を記憶しており、
前記複数の制御情報のうち、少なくともひとつは前記装置識別情報を含み、
前記取得手段は、前記ヒント出力装置から前記装置識別情報を取得し、
前記選択手段は、前記取得手段によって取得された前記装置識別情報を含む制御情報を選択する
ことを特徴とする請求項1に記載のロボット。
【請求項3】
前記ヒント出力装置は、前記装置ヒント情報として、前記ヒント出力装置を保持する利用者に関する利用者情報を記憶しており、
前記複数の制御情報のうち、少なくともひとつが前記利用者情報を含み、
前記取得手段は、前記ヒント出力装置から前記利用者情報を取得し、
前記選択手段は、前記取得手段によって取得された前記利用者情報を含む制御情報を選択する
ことを特徴とする請求項1に記載のロボット。
【請求項4】
前記ヒント出力装置は、前記ヒント出力装置と当該ロボットとの過去のコンタクトを示すコンタクト情報を、前記装置ヒント情報として記憶しており、
前記取得手段は、前記ヒント出力装置から、前記コンタクト情報を取得し、
前記選択手段は、取得された前記コンタクト情報に基づいて、制御情報を選択する
ことを特徴とする請求項1に記載のロボット。
【請求項5】
前記コンタクト情報は、前記ヒント出力装置が当該ロボットと過去にコンタクトを取ったコンタクト回数であり、
前記複数の制御情報は、それぞれ、コンタクト回数の範囲と対応しており、
前記取得手段は、前記ヒント出力装置から、前記コンタクト回数を取得し、
前記選択手段は、取得した前記コンタクト回数の含まれる範囲と対応する制御情報を選択する
ことを特徴とする請求項4に記載のロボット。
【請求項6】
前記コンタクト情報は、前記ヒント出力装置が当該ロボットとコンタクトを取った最も新しい時を示すコンタクト日時であり、
前記複数の制御情報は、それぞれ、前記コンタクト日時からの経過時間の範囲と対応しており、
前記取得手段は、前記ヒント出力装置から、前記コンタクト日時を取得し、
前記選択手段は、取得した前記コンタクト日時からの経過時間を算出し、算出した経過時間を含む範囲と対応する制御情報を選択する
ことを特徴とする請求項4に記載のロボット。
【請求項7】
前記コンタクト情報は、前記ヒント出力装置が当該ロボットとコンタクトをとった際に、外的要因及び内的要因により当該ロボットに生じる擬似的な感情を示す感情指数であり、
前記複数の制御情報は、それぞれ、感情指数の範囲と対応しており、
前記取得手段は、前記ヒント出力装置から、前記感情指数を取得し、
前記選択手段は、取得した前記感情指数を含む範囲と対応する制御情報を選択する
ことを特徴とする請求項4に記載のロボット。
【請求項8】
前記ロボットは、さらに、前記ヒント出力装置と当該ロボットとのコンタクト中において、当該コンタクトを示す最新コンタクト情報を、前記ヒント出力装置へ定期的に送信する送信手段を備え、
前記ヒント出力装置は、前記最新コンタクト情報を受信し、受信した最新コンタクト情報により前記コンタクト情報を更新する
ことを特徴とする請求項4に記載のロボット。
【請求項9】
前記ヒント出力装置は、前記ヒント出力装置と他のロボットとのコンタクトを示すコンタクト情報を、前記装置ヒント情報として記憶しており、
前記取得手段は、前記ヒント出力装置から、前記コンタクト情報を取得し、
前記選択手段は、取得した前記コンタクト情報の示す前記他のロボットとの前記コンタクトに応じて、制御情報を選択する
ことを特徴とする請求項1に記載のロボット。
【請求項10】
前記コンタクト情報は、前記他のロボットの種別を示す他の属性情報を含んでおり、
前記選択手段は、予め、当該ロボットの種別を示す属性情報を保持しており、前記取得手段の取得した前記他の属性情報と保持している属性情報とが一致するか否かによって、制御情報を選択する
ことを特徴とする請求項9に記載のロボット。
【請求項11】
前記ヒント出力装置は、前記ヒント出力装置が過去にコンタクトを取ったコンタクト済みロボットの種別を示す属性情報と、コンタクト回数とを、前記装置ヒント情報として記憶しており、
前記記憶手段の記憶している制御情報のうち一つは、当該ロボットの機能及び取り扱い方法を利用者に通知する行動を定義する説明制御情報であり、
前記選択手段は、予め、当該ロボットの種別を示す属性情報と、所定の閾値とを記憶しており、取得した前記装置ヒント情報が、当該ロボットと同一の種別のロボットとのコンタクト回数が前記所定の閾値未満であることを示していれば、前記説明制御情報を選択する
ことを特徴とする請求項1に記載のロボット。
【請求項12】
前記装置ヒント情報は、前記ヒント出力装置に固有の装置識別情報であり、
前記ロボットは、さらに、
前記ヒント出力装置と当該ロボットとのコンタクトを示すコンタクト情報を、前記装置識別情報と対応して記憶しているコンタクト情報記憶手段を備え、
前記選択手段は、前記取得手段の取得した前記装置識別情報と対応する前記コンタクト情報を、前記コンタクト情報記憶手段から読み出し、読み出した前記コンタクト情報によって、制御情報を選択する
ことを特徴とする請求項1に記載のロボット。
【請求項13】
前記コンタクト情報記憶手段は、前記ヒント出力装置が当該ロボットと過去にコンタクトを取ったコンタクト回数を、前記コンタクト情報として記憶しており、
前記複数の制御情報は、それぞれ、コンタクト回数の範囲と対応しており、
前記選択手段は、前記コンタクト情報記憶手段から前記コンタクト回数を読み出し、読み出した前記コンタクト回数を含む範囲と対応する制御情報を選択する
ことを特徴とする請求項12に記載のロボット。
【請求項14】
前記コンタクト情報記憶部手段は、前記ヒント出力装置と当該ロボットとの最新のコンタクト日時を、前記コンタクト情報として記憶しており、
前記複数の制御情報は、それぞれ、前記コンタクト日時からの経過時間の範囲と対応しており、
前記選択手段は、前記コンタクト情報記憶手段から前記コンタクト日時を読み出し、読み出した前記コンタクト日時からの経過時間を算出し、算出した経過時間を含む範囲と対応する制御情報を選択する
ことを特徴とする請求項12に記載のロボット。
【請求項15】
前記コンタクト情報記憶手段は、前記ヒント出力装置が当該ロボットとコンタクトをとった際に、外的要因及び内的要因により当該ロボットに生じる擬似的な感情を示す感情指数を、前記コンタクト情報として記憶しており、
前記複数の制御情報は、それぞれ、感情指数の範囲と対応しており、
前記選択手段は、前記コンタクト情報記憶手段から前記感情指数を読み出し、読み出した前記感情指数を含む範囲と対応する制御情報を選択する
ことを特徴とする請求項12に記載のロボット。
【請求項16】
前記ヒント出力装置の記憶している前記装置ヒント情報は、前記ヒント出力装置に固有の装置識別情報を含み、
前記ロボットは、さらに、
当該ロボットと他のヒント出力装置とのコンタクトを示すコンタクト情報を、前記他のヒント識別装置に固有の他の装置識別情報と対応して記憶しているコンタクト情報記憶手段を備え、
前記選択手段は、取得した前記装置識別情報と前記他の装置識別情報とが一致しない場合、前記コンタクト情報に基づいて、制御情報を選択する
ことを特徴とする請求項1に記載のロボット。
【請求項17】
前記装置ヒント情報は、前記装置識別情報に加えて、前記ヒント出力装置を保持する利用者に関する利用者情報を含み、
前記コンタクト情報は、前記他のヒント出力装置を保持する利用者に係る他の利用者情報を含み、
前記選択手段は、前記取得手段の取得した前記利用者情報と、前記コンタクト情報に含まれる前記他の利用者情報とが一致するか否かによって、制御情報を選択する
ことを特徴とする請求項16に記載のロボット。
【請求項18】
前記ロボットは、さらに、
前記ヒント出力装置と当該ロボットとのコンタクトの終了を判断する終了判断手段を備え、
前記駆動制御手段は、前記選択手段による選択から、前記終了判断手段によって終了と判断されるまでの間、前記選択された制御情報を用いて、前記駆動部を駆動制御する
ことを特徴とする請求項1に記載のロボット。
【請求項19】
前記終了判断手段は、
前記ヒント出力装置へ、通信可能であることを確認する通信確認情報を出力する出力部と、
前記通信確認情報を正常に受信したことを示す受信応答を、前記ヒント出力装置から取得する応答取得部と、
前記応答取得手段により、前記受信応答が正常に取得されなかった場合に、前記ヒント出力装置と当該ロボットとのコンタクトが終了したと判断する判断部とを含む
ことを特徴とする請求項18に記載のロボット。
【請求項20】
前記終了判断手段は、外部からの入力情報を取得する取得部と、
入力情報を取得してからの時間の経過を計測する計測部と、
1の入力情報が取得されてから、一定時間内に、次の入力情報が取得されない場合、前記ヒント出力装置と当該ロボットとのコンタクトが終了したと決定する決定部とを含む
ことを特徴とする請求項18に記載のロボット。
【請求項21】
前記ヒント出力装置は、前記装置ヒント情報を記憶している非接触ICカードであって、
前記取得手段は、無線通信により前記非接触ICカードから前記装置ヒント情報を取得する
ことを特徴とする請求項1に記載のロボット。
【請求項22】
前記駆動制御手段は、予め、有限確率オートマトンに基づく複数の状態遷移表を保持しており、前記選択手段による選択の後は、前記複数の状態遷移表及び選択された制御情報を用いて、前記駆動制御を行う
ことを特徴とする請求項1に記載のロボット。
【請求項23】
前記複数の状態遷移表は、各状態遷移表の対応するノードから他のノードへの遷移確率から構成されており、
前記記憶手段の記憶している各制御情報は、それぞれ、各状態遷移表を構成する遷移確率の増減量を定義するものであり、
前記駆動制御手段は、選択された制御情報の定義する増減量に従って、各状態遷移表を構成する遷移確率を増加及び減少させ、増加及び減少後の状態遷移表を用いて、前記駆動制御を行う
ことを特徴とする請求項22に記載のロボット。
【請求項24】
自律的に複数の行動をするロボットとコンタクトを取るヒント出力装置であって、
前記ロボットの複数の行動のうちいずれかを示唆する装置ヒント情報を記憶しているヒント記憶手段と、
前記装置ヒント情報を前記記憶手段から読み出し、前記ロボットへ出力する出力手段と
を備えることを特徴とするヒント出力装置。
【請求項25】
前記記憶手段は、当該ヒント出力装置と前記ロボットとの過去のコンタクトを示すコンタクト情報を、前記ヒント情報として記憶しており、
前記ロボットは、前記ヒント出力装置と当該ロボットとのコンタクト中において、当該コンタクトを示す最新コンタクト情報と前記コンタクト情報の更新指示を、前記ヒント出力装置へ出力し、
前記ヒント出力装置は、さらに、前記最新コンタクト情報と前記更新指示とを取得する取得手段と、
前記更新指示に従って、前記最新コンタクト情報を用いて、前記装置ヒント情報を更新する更新手段と
を備えることを特徴とする請求項24に記載のヒント出力装置。
【請求項26】
自律的に行動するロボットと前記ロボットに行動のヒントを与えるヒント出力装置から構成されるロボット制御システムであって、
前記ロボットは、
駆動部と、
当該ロボットの複数の行動をそれぞれ定義する複数の制御情報を記憶している記憶手段と、
前記ヒント出力装置から、前記複数の行動のうちいずれかを示唆する装置ヒント情報を取得する取得手段と、
取得した装置ヒント情報により示唆される行動を定義する制御情報を前記記憶手段から選択する選択手段と、
選択された制御情報により定義された行動を当該ロボットがするように、選択された制御情報に基づいて、前記駆動部を駆動制御する駆動制御手段とを備え、
前記ヒント出力装置は、
前記装置ヒント情報を記憶しているヒント記憶手段と、
前記装置ヒント情報を前記記憶手段から読み出し、前記ロボットへ送信する送信手段とを備える
ることを特徴とするロボット制御システム。
【請求項27】
利用者とコンタクトを取りつつ、自律的に行動するロボットにおいて用いられるロボット制御方法であって、
前記ロボットは、駆動部と、当該ロボットの複数の行動をそれぞれ定義する複数の制御情報を記憶している記憶手段とを備え、
前記ロボット制御方法は、
ロボットに行動のヒントを与えるヒント出力装置から、前記複数の行動のうちいずれかを示唆する装置ヒント情報を取得する取得ステップと、
取得した装置ヒント情報により示唆される行動を定義する制御情報を前記記憶手段から選択する選択ステップと、
選択された制御情報により定義された行動を当該ロボットがするように、選択された制御情報に基づいて、前記駆動部を駆動制御する駆動制御ステップと
を備えることを特徴とするロボット制御方法。
【請求項28】
利用者とコンタクトを取りつつ、自律的に行動するロボットにおいて用いられるロボット制御プログラムであって、
前記ロボットは、駆動部と、当該ロボットの複数の行動をそれぞれ定義する複数の制御情報を記憶している記憶手段とを備え、
前記ロボット制御プログラムは、
ロボットに行動のヒントを与えるヒント出力装置から、前記複数の行動のうちいずれかを示唆する装置ヒント情報を取得する取得ステップと、
取得した装置ヒント情報により示唆される行動を定義する制御情報を前記記憶手段から選択する選択ステップと、
選択された制御情報により定義された行動を当該ロボットがするように、選択された制御情報に基づいて、前記駆動部を駆動制御する駆動制御ステップと
を備えることを特徴とするロボット制御プログラム。
【請求項29】
前記ロボット制御プログラムは、
コンピュータ読み取り可能な記録媒体に記録されている
ことを特徴とする請求項28に記載のロボット制御プログラム。
【請求項30】
前記ロボット制御プログラムは、
電気通信回線を通じて送受信される
ことを特徴とする請求項28に記載のロボット制御プログラム。
【請求項31】
利用者とコンタクトを取りつつ、自律的に行動するロボットに搭載される集積回路であって、
前記ロボットは、駆動部を備えており、
前記集積回路は、当該ロボットの複数の行動をそれぞれ定義する複数の制御情報を記憶している記憶手段と、
ロボットに行動のヒントを与えるヒント出力装置から、前記複数の行動のうちいずれかを示唆する装置ヒント情報を取得する取得手段と、
取得した装置ヒント情報により示唆される行動を定義する制御情報を前記記憶手段から選択する選択手段と、
選択された制御情報により定義された行動を当該ロボットがするように、選択された制御情報に基づいて、前記駆動部を駆動制御する駆動制御手段と
を備えることを特徴とする集積回路。
【請求項1】
利用者とコンタクトを取りつつ、自律的に行動するロボットであって、
駆動部と、
当該ロボットの複数の行動をそれぞれ定義する複数の制御情報を記憶している記憶手段と、
ロボットに行動のヒントを与えるヒント出力装置から、前記複数の行動のうちいずれかを示唆する装置ヒント情報を取得する取得手段と、
取得した装置ヒント情報により示唆される行動を定義する制御情報を前記記憶手段から選択する選択手段と、
選択された制御情報により定義された行動を当該ロボットがするように、選択された制御情報に基づいて、前記駆動部を駆動制御する駆動制御手段と
を備えることを特徴とするロボット。
【請求項2】
前記ヒント出力装置は、前記装置ヒント情報として、前記ヒント出力装置に固有の装置識別情報を記憶しており、
前記複数の制御情報のうち、少なくともひとつは前記装置識別情報を含み、
前記取得手段は、前記ヒント出力装置から前記装置識別情報を取得し、
前記選択手段は、前記取得手段によって取得された前記装置識別情報を含む制御情報を選択する
ことを特徴とする請求項1に記載のロボット。
【請求項3】
前記ヒント出力装置は、前記装置ヒント情報として、前記ヒント出力装置を保持する利用者に関する利用者情報を記憶しており、
前記複数の制御情報のうち、少なくともひとつが前記利用者情報を含み、
前記取得手段は、前記ヒント出力装置から前記利用者情報を取得し、
前記選択手段は、前記取得手段によって取得された前記利用者情報を含む制御情報を選択する
ことを特徴とする請求項1に記載のロボット。
【請求項4】
前記ヒント出力装置は、前記ヒント出力装置と当該ロボットとの過去のコンタクトを示すコンタクト情報を、前記装置ヒント情報として記憶しており、
前記取得手段は、前記ヒント出力装置から、前記コンタクト情報を取得し、
前記選択手段は、取得された前記コンタクト情報に基づいて、制御情報を選択する
ことを特徴とする請求項1に記載のロボット。
【請求項5】
前記コンタクト情報は、前記ヒント出力装置が当該ロボットと過去にコンタクトを取ったコンタクト回数であり、
前記複数の制御情報は、それぞれ、コンタクト回数の範囲と対応しており、
前記取得手段は、前記ヒント出力装置から、前記コンタクト回数を取得し、
前記選択手段は、取得した前記コンタクト回数の含まれる範囲と対応する制御情報を選択する
ことを特徴とする請求項4に記載のロボット。
【請求項6】
前記コンタクト情報は、前記ヒント出力装置が当該ロボットとコンタクトを取った最も新しい時を示すコンタクト日時であり、
前記複数の制御情報は、それぞれ、前記コンタクト日時からの経過時間の範囲と対応しており、
前記取得手段は、前記ヒント出力装置から、前記コンタクト日時を取得し、
前記選択手段は、取得した前記コンタクト日時からの経過時間を算出し、算出した経過時間を含む範囲と対応する制御情報を選択する
ことを特徴とする請求項4に記載のロボット。
【請求項7】
前記コンタクト情報は、前記ヒント出力装置が当該ロボットとコンタクトをとった際に、外的要因及び内的要因により当該ロボットに生じる擬似的な感情を示す感情指数であり、
前記複数の制御情報は、それぞれ、感情指数の範囲と対応しており、
前記取得手段は、前記ヒント出力装置から、前記感情指数を取得し、
前記選択手段は、取得した前記感情指数を含む範囲と対応する制御情報を選択する
ことを特徴とする請求項4に記載のロボット。
【請求項8】
前記ロボットは、さらに、前記ヒント出力装置と当該ロボットとのコンタクト中において、当該コンタクトを示す最新コンタクト情報を、前記ヒント出力装置へ定期的に送信する送信手段を備え、
前記ヒント出力装置は、前記最新コンタクト情報を受信し、受信した最新コンタクト情報により前記コンタクト情報を更新する
ことを特徴とする請求項4に記載のロボット。
【請求項9】
前記ヒント出力装置は、前記ヒント出力装置と他のロボットとのコンタクトを示すコンタクト情報を、前記装置ヒント情報として記憶しており、
前記取得手段は、前記ヒント出力装置から、前記コンタクト情報を取得し、
前記選択手段は、取得した前記コンタクト情報の示す前記他のロボットとの前記コンタクトに応じて、制御情報を選択する
ことを特徴とする請求項1に記載のロボット。
【請求項10】
前記コンタクト情報は、前記他のロボットの種別を示す他の属性情報を含んでおり、
前記選択手段は、予め、当該ロボットの種別を示す属性情報を保持しており、前記取得手段の取得した前記他の属性情報と保持している属性情報とが一致するか否かによって、制御情報を選択する
ことを特徴とする請求項9に記載のロボット。
【請求項11】
前記ヒント出力装置は、前記ヒント出力装置が過去にコンタクトを取ったコンタクト済みロボットの種別を示す属性情報と、コンタクト回数とを、前記装置ヒント情報として記憶しており、
前記記憶手段の記憶している制御情報のうち一つは、当該ロボットの機能及び取り扱い方法を利用者に通知する行動を定義する説明制御情報であり、
前記選択手段は、予め、当該ロボットの種別を示す属性情報と、所定の閾値とを記憶しており、取得した前記装置ヒント情報が、当該ロボットと同一の種別のロボットとのコンタクト回数が前記所定の閾値未満であることを示していれば、前記説明制御情報を選択する
ことを特徴とする請求項1に記載のロボット。
【請求項12】
前記装置ヒント情報は、前記ヒント出力装置に固有の装置識別情報であり、
前記ロボットは、さらに、
前記ヒント出力装置と当該ロボットとのコンタクトを示すコンタクト情報を、前記装置識別情報と対応して記憶しているコンタクト情報記憶手段を備え、
前記選択手段は、前記取得手段の取得した前記装置識別情報と対応する前記コンタクト情報を、前記コンタクト情報記憶手段から読み出し、読み出した前記コンタクト情報によって、制御情報を選択する
ことを特徴とする請求項1に記載のロボット。
【請求項13】
前記コンタクト情報記憶手段は、前記ヒント出力装置が当該ロボットと過去にコンタクトを取ったコンタクト回数を、前記コンタクト情報として記憶しており、
前記複数の制御情報は、それぞれ、コンタクト回数の範囲と対応しており、
前記選択手段は、前記コンタクト情報記憶手段から前記コンタクト回数を読み出し、読み出した前記コンタクト回数を含む範囲と対応する制御情報を選択する
ことを特徴とする請求項12に記載のロボット。
【請求項14】
前記コンタクト情報記憶部手段は、前記ヒント出力装置と当該ロボットとの最新のコンタクト日時を、前記コンタクト情報として記憶しており、
前記複数の制御情報は、それぞれ、前記コンタクト日時からの経過時間の範囲と対応しており、
前記選択手段は、前記コンタクト情報記憶手段から前記コンタクト日時を読み出し、読み出した前記コンタクト日時からの経過時間を算出し、算出した経過時間を含む範囲と対応する制御情報を選択する
ことを特徴とする請求項12に記載のロボット。
【請求項15】
前記コンタクト情報記憶手段は、前記ヒント出力装置が当該ロボットとコンタクトをとった際に、外的要因及び内的要因により当該ロボットに生じる擬似的な感情を示す感情指数を、前記コンタクト情報として記憶しており、
前記複数の制御情報は、それぞれ、感情指数の範囲と対応しており、
前記選択手段は、前記コンタクト情報記憶手段から前記感情指数を読み出し、読み出した前記感情指数を含む範囲と対応する制御情報を選択する
ことを特徴とする請求項12に記載のロボット。
【請求項16】
前記ヒント出力装置の記憶している前記装置ヒント情報は、前記ヒント出力装置に固有の装置識別情報を含み、
前記ロボットは、さらに、
当該ロボットと他のヒント出力装置とのコンタクトを示すコンタクト情報を、前記他のヒント識別装置に固有の他の装置識別情報と対応して記憶しているコンタクト情報記憶手段を備え、
前記選択手段は、取得した前記装置識別情報と前記他の装置識別情報とが一致しない場合、前記コンタクト情報に基づいて、制御情報を選択する
ことを特徴とする請求項1に記載のロボット。
【請求項17】
前記装置ヒント情報は、前記装置識別情報に加えて、前記ヒント出力装置を保持する利用者に関する利用者情報を含み、
前記コンタクト情報は、前記他のヒント出力装置を保持する利用者に係る他の利用者情報を含み、
前記選択手段は、前記取得手段の取得した前記利用者情報と、前記コンタクト情報に含まれる前記他の利用者情報とが一致するか否かによって、制御情報を選択する
ことを特徴とする請求項16に記載のロボット。
【請求項18】
前記ロボットは、さらに、
前記ヒント出力装置と当該ロボットとのコンタクトの終了を判断する終了判断手段を備え、
前記駆動制御手段は、前記選択手段による選択から、前記終了判断手段によって終了と判断されるまでの間、前記選択された制御情報を用いて、前記駆動部を駆動制御する
ことを特徴とする請求項1に記載のロボット。
【請求項19】
前記終了判断手段は、
前記ヒント出力装置へ、通信可能であることを確認する通信確認情報を出力する出力部と、
前記通信確認情報を正常に受信したことを示す受信応答を、前記ヒント出力装置から取得する応答取得部と、
前記応答取得手段により、前記受信応答が正常に取得されなかった場合に、前記ヒント出力装置と当該ロボットとのコンタクトが終了したと判断する判断部とを含む
ことを特徴とする請求項18に記載のロボット。
【請求項20】
前記終了判断手段は、外部からの入力情報を取得する取得部と、
入力情報を取得してからの時間の経過を計測する計測部と、
1の入力情報が取得されてから、一定時間内に、次の入力情報が取得されない場合、前記ヒント出力装置と当該ロボットとのコンタクトが終了したと決定する決定部とを含む
ことを特徴とする請求項18に記載のロボット。
【請求項21】
前記ヒント出力装置は、前記装置ヒント情報を記憶している非接触ICカードであって、
前記取得手段は、無線通信により前記非接触ICカードから前記装置ヒント情報を取得する
ことを特徴とする請求項1に記載のロボット。
【請求項22】
前記駆動制御手段は、予め、有限確率オートマトンに基づく複数の状態遷移表を保持しており、前記選択手段による選択の後は、前記複数の状態遷移表及び選択された制御情報を用いて、前記駆動制御を行う
ことを特徴とする請求項1に記載のロボット。
【請求項23】
前記複数の状態遷移表は、各状態遷移表の対応するノードから他のノードへの遷移確率から構成されており、
前記記憶手段の記憶している各制御情報は、それぞれ、各状態遷移表を構成する遷移確率の増減量を定義するものであり、
前記駆動制御手段は、選択された制御情報の定義する増減量に従って、各状態遷移表を構成する遷移確率を増加及び減少させ、増加及び減少後の状態遷移表を用いて、前記駆動制御を行う
ことを特徴とする請求項22に記載のロボット。
【請求項24】
自律的に複数の行動をするロボットとコンタクトを取るヒント出力装置であって、
前記ロボットの複数の行動のうちいずれかを示唆する装置ヒント情報を記憶しているヒント記憶手段と、
前記装置ヒント情報を前記記憶手段から読み出し、前記ロボットへ出力する出力手段と
を備えることを特徴とするヒント出力装置。
【請求項25】
前記記憶手段は、当該ヒント出力装置と前記ロボットとの過去のコンタクトを示すコンタクト情報を、前記ヒント情報として記憶しており、
前記ロボットは、前記ヒント出力装置と当該ロボットとのコンタクト中において、当該コンタクトを示す最新コンタクト情報と前記コンタクト情報の更新指示を、前記ヒント出力装置へ出力し、
前記ヒント出力装置は、さらに、前記最新コンタクト情報と前記更新指示とを取得する取得手段と、
前記更新指示に従って、前記最新コンタクト情報を用いて、前記装置ヒント情報を更新する更新手段と
を備えることを特徴とする請求項24に記載のヒント出力装置。
【請求項26】
自律的に行動するロボットと前記ロボットに行動のヒントを与えるヒント出力装置から構成されるロボット制御システムであって、
前記ロボットは、
駆動部と、
当該ロボットの複数の行動をそれぞれ定義する複数の制御情報を記憶している記憶手段と、
前記ヒント出力装置から、前記複数の行動のうちいずれかを示唆する装置ヒント情報を取得する取得手段と、
取得した装置ヒント情報により示唆される行動を定義する制御情報を前記記憶手段から選択する選択手段と、
選択された制御情報により定義された行動を当該ロボットがするように、選択された制御情報に基づいて、前記駆動部を駆動制御する駆動制御手段とを備え、
前記ヒント出力装置は、
前記装置ヒント情報を記憶しているヒント記憶手段と、
前記装置ヒント情報を前記記憶手段から読み出し、前記ロボットへ送信する送信手段とを備える
ることを特徴とするロボット制御システム。
【請求項27】
利用者とコンタクトを取りつつ、自律的に行動するロボットにおいて用いられるロボット制御方法であって、
前記ロボットは、駆動部と、当該ロボットの複数の行動をそれぞれ定義する複数の制御情報を記憶している記憶手段とを備え、
前記ロボット制御方法は、
ロボットに行動のヒントを与えるヒント出力装置から、前記複数の行動のうちいずれかを示唆する装置ヒント情報を取得する取得ステップと、
取得した装置ヒント情報により示唆される行動を定義する制御情報を前記記憶手段から選択する選択ステップと、
選択された制御情報により定義された行動を当該ロボットがするように、選択された制御情報に基づいて、前記駆動部を駆動制御する駆動制御ステップと
を備えることを特徴とするロボット制御方法。
【請求項28】
利用者とコンタクトを取りつつ、自律的に行動するロボットにおいて用いられるロボット制御プログラムであって、
前記ロボットは、駆動部と、当該ロボットの複数の行動をそれぞれ定義する複数の制御情報を記憶している記憶手段とを備え、
前記ロボット制御プログラムは、
ロボットに行動のヒントを与えるヒント出力装置から、前記複数の行動のうちいずれかを示唆する装置ヒント情報を取得する取得ステップと、
取得した装置ヒント情報により示唆される行動を定義する制御情報を前記記憶手段から選択する選択ステップと、
選択された制御情報により定義された行動を当該ロボットがするように、選択された制御情報に基づいて、前記駆動部を駆動制御する駆動制御ステップと
を備えることを特徴とするロボット制御プログラム。
【請求項29】
前記ロボット制御プログラムは、
コンピュータ読み取り可能な記録媒体に記録されている
ことを特徴とする請求項28に記載のロボット制御プログラム。
【請求項30】
前記ロボット制御プログラムは、
電気通信回線を通じて送受信される
ことを特徴とする請求項28に記載のロボット制御プログラム。
【請求項31】
利用者とコンタクトを取りつつ、自律的に行動するロボットに搭載される集積回路であって、
前記ロボットは、駆動部を備えており、
前記集積回路は、当該ロボットの複数の行動をそれぞれ定義する複数の制御情報を記憶している記憶手段と、
ロボットに行動のヒントを与えるヒント出力装置から、前記複数の行動のうちいずれかを示唆する装置ヒント情報を取得する取得手段と、
取得した装置ヒント情報により示唆される行動を定義する制御情報を前記記憶手段から選択する選択手段と、
選択された制御情報により定義された行動を当該ロボットがするように、選択された制御情報に基づいて、前記駆動部を駆動制御する駆動制御手段と
を備えることを特徴とする集積回路。
【図1】


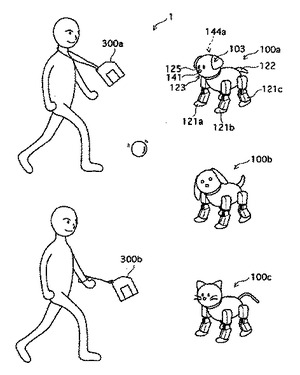
【図2】
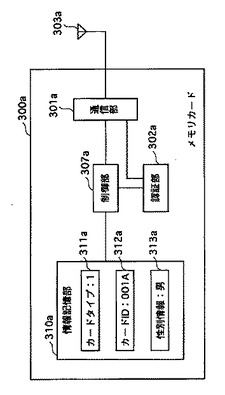
【図3】
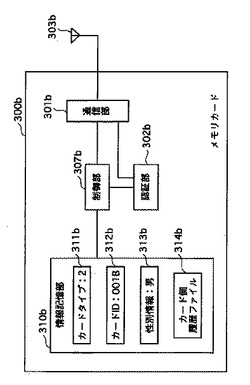
【図4】
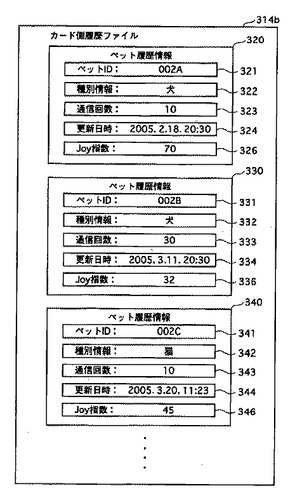
【図5】
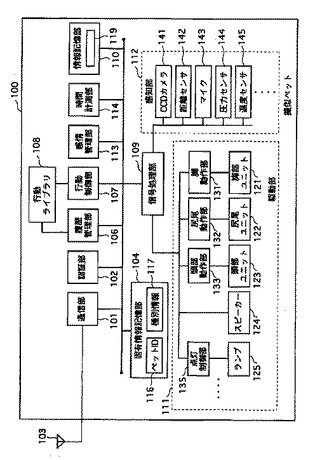
【図6】
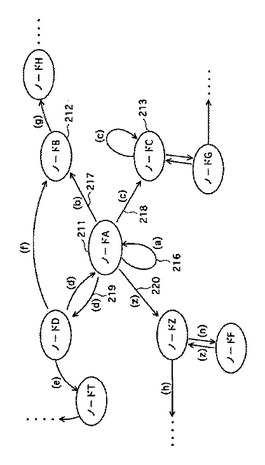
【図7】
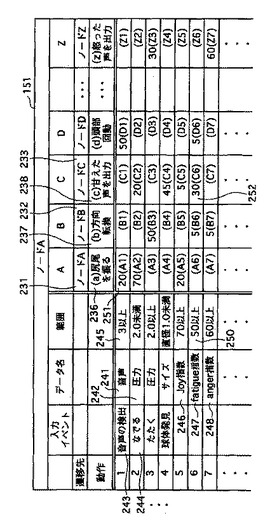
【図8】
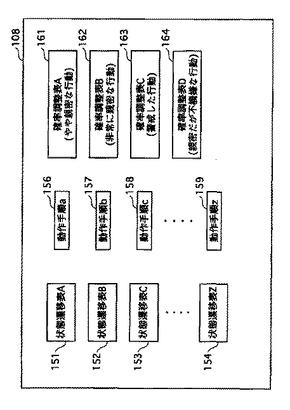
【図9】
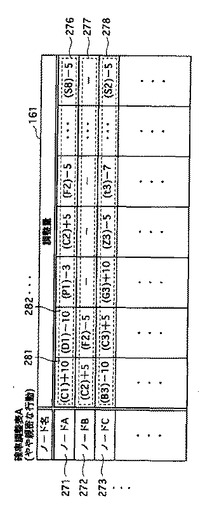
【図10】
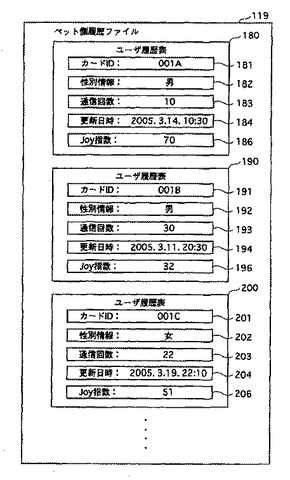
【図11】
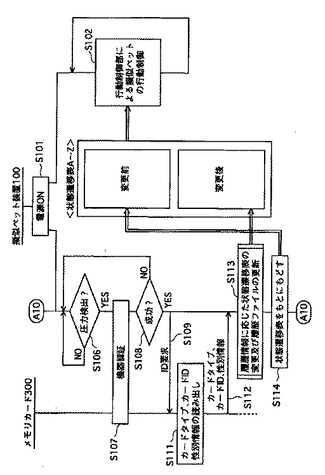
【図12】
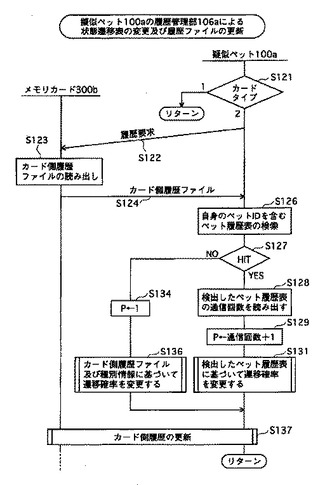
【図13】
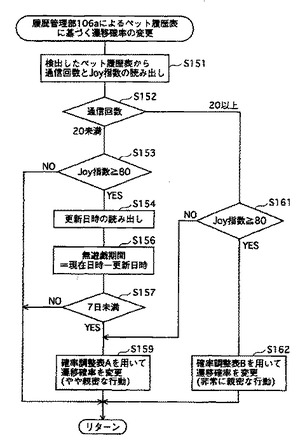
【図14】
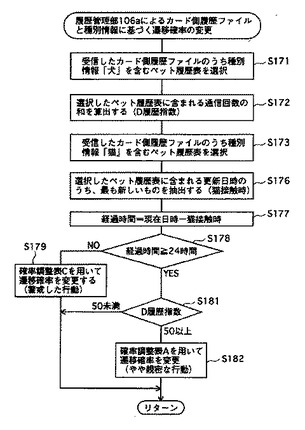
【図15】
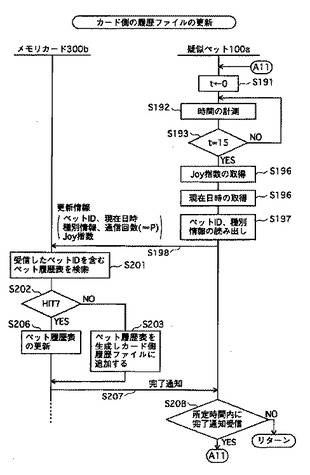
【図16】
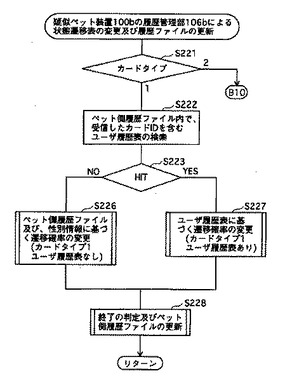
【図17】
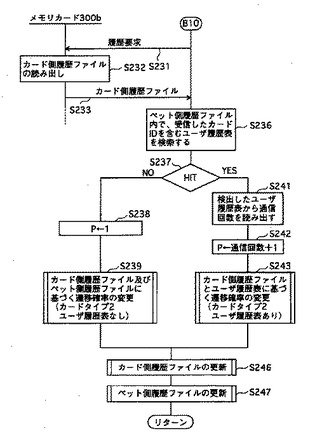
【図18】
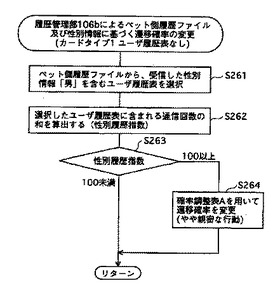
【図19】
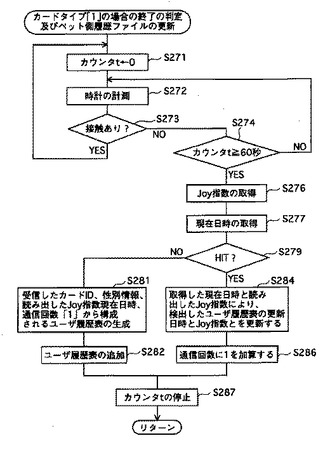
【図20】
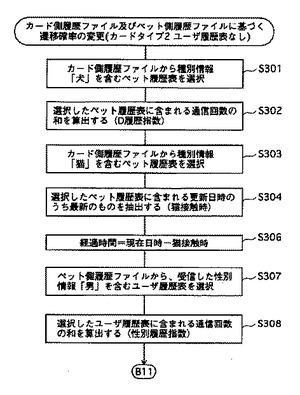
【図21】
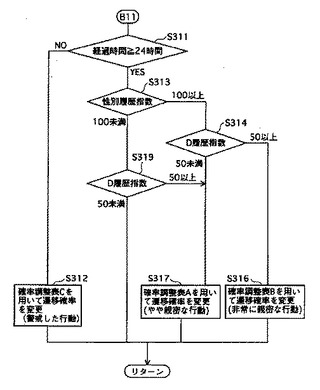
【図22】
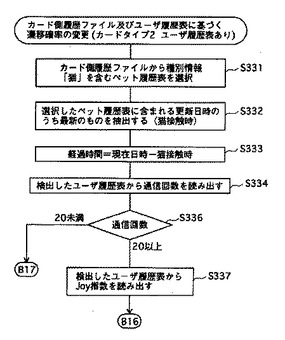
【図23】
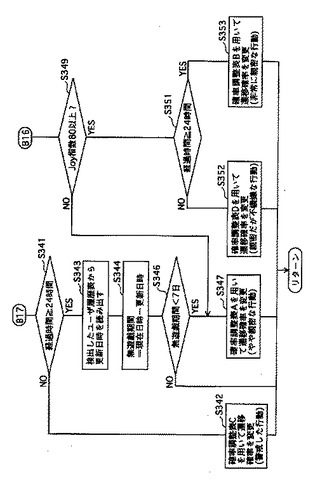
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【国際公開番号】WO2005/099971
【国際公開日】平成17年10月27日(2005.10.27)
【発行日】平成19年8月16日(2007.8.16)
【国際特許分類】
【出願番号】特願2006−512366(P2006−512366)
【国際出願番号】PCT/JP2005/007201
【国際出願日】平成17年4月14日(2005.4.14)
【出願人】(000005821)松下電器産業株式会社 (73,050)
【Fターム(参考)】
【国際公開日】平成17年10月27日(2005.10.27)
【発行日】平成19年8月16日(2007.8.16)
【国際特許分類】
【国際出願番号】PCT/JP2005/007201
【国際出願日】平成17年4月14日(2005.4.14)
【出願人】(000005821)松下電器産業株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]