
ロボットのリンク装置
【課題】ロボットの歩行脚またはアームとして機能するロボットのリンク装置において、関節にガタなどを設けても、高精度に、第1のリンクに対する第2のリンクの回転角を制御できるようにする。
【解決手段】歩行脚またはアームを構成する第1および第2のリンク3、5と、リンク3、5を連結する関節7とを備える。関節は、第1および第2の関節部7a、7bを有する。第1および第2の関節部は、リンク3、5の一方に対し衝撃吸収用のガタをもって取り付けられ、リンク3、5との他方に対し関節の軸周りに回転可能に取り付けられる。第1および第2のモータ9、11は、第1および第2の関節部を同じ方向に回転駆動することで、第1のリンクに対し第2のリンクを回転させ、第1および第2の関節部を逆方向に回転駆動することで、回転方向のガタの大きさを調整する。
【解決手段】歩行脚またはアームを構成する第1および第2のリンク3、5と、リンク3、5を連結する関節7とを備える。関節は、第1および第2の関節部7a、7bを有する。第1および第2の関節部は、リンク3、5の一方に対し衝撃吸収用のガタをもって取り付けられ、リンク3、5との他方に対し関節の軸周りに回転可能に取り付けられる。第1および第2のモータ9、11は、第1および第2の関節部を同じ方向に回転駆動することで、第1のリンクに対し第2のリンクを回転させ、第1および第2の関節部を逆方向に回転駆動することで、回転方向のガタの大きさを調整する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ロボットの歩行脚またはアームとして機能するロボットのリンク装置に関する。
【背景技術】
【0002】
ロボットの歩行脚またはアームは、関節を介して互いに回転可能に連結される第1および第2のリンクにより構成される。このような第1および第2のリンクが、関節の軸周りに回転することで、ロボットの歩行脚またはアームが動作する。第1および第2のリンクが、歩行脚を構成する場合、これらリンクの回転動作によりロボットが歩行する。第1および第2のリンクが、アームを構成する場合、これらリンクの回転動作により、アームが所望の動作(仕事)をする。
【0003】
ロボットの動作により、上述の関節には、衝撃が作用する。例えば、歩行時に、各歩行脚は、床面から離れた後、再び、床面に着地する。この着地による衝撃力が関節に作用する。また、アームが動作中に障害物に衝突すると、衝撃力が関節に作用する。
【0004】
そのため、衝撃力を緩和するために、関節に、ガタ(遊び)や衝撃吸収部材を設けることが考えられる。
ガタの範囲内で、第1および第2のリンクが、互いに対し回転自在となる。さらに、関節に作用する衝撃力を吸収する衝撃吸収部材を設ける。衝撃吸収部材は、バネやダンパーなどである。この構成で、上述のガタの角度範囲内で、第1および第2のリンクを互いに回転させるような衝撃力が関節に作用した時、この衝撃力が、バネやダンパーに吸収される。
【0005】
本願の先行技術文献として、下記の非特許文献1がある。
【先行技術文献】
【非特許文献】
【0006】
【非特許文献1】日本ロボット学会 創立20周年記念学術講演会(2002年10月12〜14日) パンフレット
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかし、関節に、バネやダンパーなどを設ける場合には、高精度に、第1のリンクに対する第2のリンクの回転角(姿勢)を制御できない。モータの回転角制御により、第1のリンクに対する第2のリンクの回転角を制御しようとしても、当該回転角は、上述のガタ、およびバネやダンパーの影響で定まらない。また、バネやダンパーの影響を考慮すると、モータの回転角制御が複雑になる。
【0008】
そこで、本発明の目的は、ロボットの歩行脚またはアームとして機能するロボットのリンク装置において、関節にガタなどを設けても、高精度に、第1のリンクに対する第2のリンクの回転角を制御できるようにすることにある。
【課題を解決するための手段】
【0009】
上記目的を達成するため、本発明によると、ロボットの歩行脚またはアームとして機能するリンク装置であって、
歩行脚またはアームを構成する第1および第2のリンクと、
第1および第2のリンクを回転可能に連結する関節と、を備え、
前記関節は、該関節の軸方向一方側に設けられた第1の関節部と、該関節の軸方向他方側に設けられた第2の関節部と、を有し、
第1および第2の関節部は、第1および第2のリンクの一方に対し衝撃吸収用のガタをもって取り付けられ、第1および第2のリンクの他方に対し前記関節の軸周りに回転可能に取り付けられ、
さらに、前記他方に固定され、第1の関節部を前記軸周りに回転駆動する第1のモータと、
前記他方に固定され、第2の関節部を前記軸周りに回転駆動する第2のモータと、を備え、
第1および第2のモータは、第1および第2の関節部を同じ方向に回転駆動することで、第1のリンクに対し第2のリンクを回転させ、第1および第2の関節部を逆方向に回転駆動することで、当該回転方向の前記ガタの大きさを調整する、ことを特徴とするロボットのリンク装置が提供される。
【0010】
本発明の好ましい実施形態によると、第1および第2の関節部を同軸に連結可能なクラッチを備える。
【0011】
また、本発明の好ましい実施形態によると、第1および第2モータは、それぞれ、ベベルギアを介して第1および第2の関節部を回転駆動し、
前記各モータの軸が前記他方のリンクの長手方向を向いている。
【0012】
本発明の好ましい実施形態によると、リンク装置は、第1および第2のモータの回転角を制御する制御装置を備え、
該制御装置は、
(A)第1および第2のモータの回転角を制御することで、第1および第2の関節部を逆方向に回転させ、これにより、前記ガタを減らし、
(B)この状態で、前記クラッチを接続させ、
(C)その後、第1および第2のモータの回転角を制御することで、第1および第2の関節部を同じ方向に回転させ、これにより、第1のリンクに対し第2のリンクを回転させる。
【0013】
本発明の別の実施形態によると、第1および第2のモータの回転角を制御する制御装置を備え、
該制御装置は、
(A)第1および第2のモータの回転角を制御することで、第1および第2の関節部を逆方向に回転させ、これにより、上記のガタを減らし、
(B)この状態における第1および第2のモータの回転角の差を維持するように、第1および第2のモータの回転角を制御することで、第1および第2の関節部を同じ方向に回転させ、これにより、第1のリンクに対し第2のリンクを回転させる。
【発明の効果】
【0014】
上述した本発明によると、第1および第2の関節部をそれぞれ回転駆動する第1および第2のモータは、第1および第2の関節部を同じ方向に回転駆動することで、第1および第2のリンクを互いに対し回転動作させ、第1および第2の関節部を逆方向に回転駆動することで、当該回転方向のガタの大きさを調整する。
従って、まず、第1および第2の関節部を逆方向に回転駆動することでガタを減らし、この状態を維持しながら、第1および第2の関節部を同じ方向に回転駆動することで、高精度に、第1のリンクに対する第2のリンクの回転角を制御することができる。また、第1および第2の関節部を逆方向に回転駆動することでガタを大きくし、これにより、関節部に作用する衝撃力を緩和することができる。
【0015】
第1および第2のモータで、第1および第2のリンクの相対回転とガタの制御との両方を実行するので、ガタを制御するために、第1および第2のモータ以外のアクチュエータを設けなくて済む。
さらに、第1および第2のモータにより第1および第2の関節部を同じ方向に回転駆動することで、第1および第2のリンクを互いに対し回転動作させるので、第1および第2のモータの両トルクを、第1および第2のリンクの相対回転動作に使用することができる。
【図面の簡単な説明】
【0016】
【図1】本発明の実施形態によるロボットのリンク装置を示す。
【図2】(A)は、図1のA−A矢視図であり、(B)は、図1のB−B矢視図であり、(C)は、(A)において弾性体をゴムにした場合を示し、(D)は、(B)において弾性体をゴムにした場合を示す。
【図3】本発明の実施形態によるリンク装置の動作制御を示すフローチャートである。
【図4】(A)は、図2(A)の状態から第1の関節部がガタの分だけ回転した状態を示し、(B)は、図2(B)の状態から第2の関節部がガタの分だけ回転した状態を示す。
【図5】本発明の実施形態によるリンク装置の他の制御を説明するための図である。
【発明を実施するための形態】
【0017】
本発明の好ましい実施形態を図面に基づいて説明する。なお、各図において共通する部分には同一の符号を付し、重複した説明を省略する。
【0018】
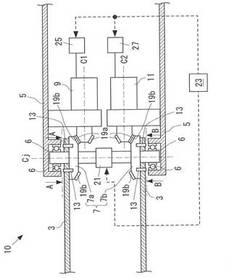
図1は、本発明の実施形態によるロボットのリンク装置10の構成図である。ロボットのリンク装置10は、産業ロボットの歩行脚またはアームとして機能する。
【0019】
リンク装置10は、図1に示すように、歩行脚またはアームを構成する第1および第2のリンク3、5と、第1および第2のリンク3、5を回転可能に連結する関節7と、を備える。
【0020】
関節7は、該関節の軸Cj方向における一方側に設けられた第1の関節部7aと、該軸Cj方向における他方側に設けられた第2の関節部7bと、を有する。第1および第2の関節部7a、7bは、第1および第2のリンク3、5の一方(図1の例では、第1のリンク3)に対し衝撃吸収用のガタをもって連結され、第1および第2のリンク3、5の他方(図1の例では、第2のリンク5)に対し関節7の軸Cj周りに回転可能に連結される。上記のガタ(遊び)の分だけ、第1および第2の関節部7a、7bは、第1および第2のリンク3、5の一方に対し回転可能である。なお、第1および第2の関節部7a、7bは、第1および第2のリンク3、5の他方に取り付けられた軸受6により軸Cj周りに回転可能に支持される。
【0021】
ロボットのリンク装置10は、第1および第2のリンク3、5の他方に固定された第1および第2のモータ9、11を備える。第1のモータ9は、第1の関節部7aを軸Cj周りに回転駆動する。第2のモータ11は、第2の関節部7bを軸Cj周りに回転駆動する。第1および第2のモータ9、11は、例えばサーボモータであってよい。第1および第2のモータ9、11は、正逆回転可能である。
第1および第2のモータ9、11は、第1および第2の関節部7a、7bを同じ方向に回転駆動することで、第1のリンク3を第2のリンク5に対し回転させる。図1の例では、第1および第2のモータ9、11は、互いに逆向きに回転することで、第1および第2の関節部7a、7bを同じ方向に回転駆動して、第1のリンク3を第2のリンク5に対し回転させる。
一方、第1および第2のモータ9、11は、第1および第2の関節部7a、7bを逆方向に回転駆動することで、前記ガタの範囲で、第1および第2の関節部7a、7bを、第1および第2のリンク3、5の前記一方に対し回転して当該回転方向の前記ガタの大きさを調整する(すなわち、ガタを減少または増加させる)。図1の例では、第1および第2のモータ9、11は、同じ向きに回転することで、第1および第2の関節部7a、7bを逆方向に回転駆動して前記ガタの大きさを調整する。
【0022】
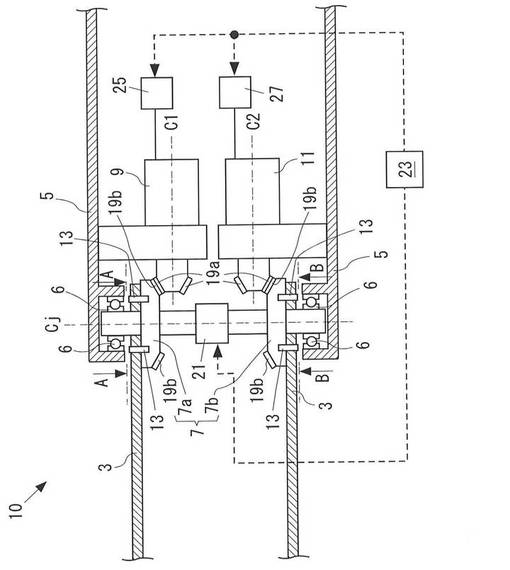
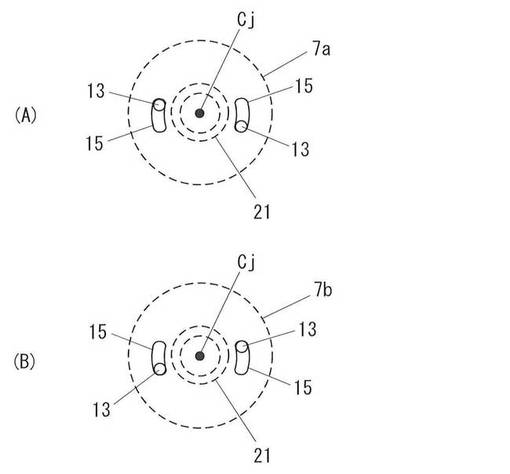
上記のガタは、例えば、図1、図2のようにピン13と長孔15によって設けられてよい。図2(A)は、図1のA−A矢視図である。図2(B)は、図1のB−B矢視図である。
ピン13は、第1の関節部7aに固定されている。ピン13は、第1および第2のリンク3、5の一方(図1、2の例では、第1のリンク3)に形成された長孔15に挿入されている。長孔15は、第1の関節部7aの回転方向に、前記ガタに相当する長さだけ延びている。従って、ピン13が、長孔15内を、長孔15の長さ分だけ自在に移動できるので、第1の関節部7aは、当該長さ(ガタ)の分だけ回転可能に第1および第2のリンク3、5の一方(図1、2の例では、第1のリンク3)に連結される。このように、第1の関節部7aは、ピン13と長孔15を介して第1および第2のリンク3、5の一方に連結される。
第2の関節部7bも、第1の関節部7aと同様に、ガタ(遊び)の分だけ回転可能に、ピン13と長孔15を介して第1および第2のリンク3、5の一方に連結される。
【0023】
ロボットのリンク装置10は、好ましくは、第1および第2の関節部7a、7bを、第1および第2のリンク3、5の前記一方に対して弾性変位させる弾性体を備える。この弾性変位の範囲は、上述のガタの範囲内であり、この弾性変位の方向は、第1および第2の関節部7a、7bの回転方向(軸Cj周りの方向)である。この弾性体により、第1および第2の関節部7a、7bは、衝撃力が作用すると弾性変位する。その結果、衝撃を緩和することができる。
弾性体は、例えば、バネであり、バネの一端は第1の関節部7aに結合され、バネの他端は、第1および第2のリンク3、5の一方(図1の例では、第1のリンク3)に結合される。
なお、弾性体は、バネに限定されず、他の弾性体(例えばゴム)であってもよい。図2(C)、(D)は、それぞれ、図2(A)、(B)において、上記の弾性体をゴム8とした場合を示す。図2(C)、(D)において、斜線で示されたゴム8は、長孔15の内周面に取り付けられるように長孔15内に充填されている。
【0024】
第1および第2のモータ9、11は、それぞれ、ベベルギア19a、19b(傘歯車)を介して第1および第2の関節部7a、7bを回転駆動する。これにより、各モータ9、11の軸C1、C2が第1または第2のリンク3、5の長手方向を向くようにすることができるので、各モータ9、11を、第1または第2のリンク3、5の内部に配置できる。なお、図1の例では、ベベルギア19aは、モータ9、11の出力軸に固定されており、ベベルギア19bは、ベベルギア19aに噛み合うように第1および第2の関節部7a、7bに固定されている。前記長手方向は、軸Cj方向と直交する。
【0025】
本実施形態では、ロボットのリンク装置10は、第1および第2の関節部7a、7bを同軸に連結可能なクラッチ21を備える。
上述のガタを減らした(例えば、無くした)状態で、クラッチ21により、第1および第2の関節部7a、7bを連結すると、ガタが減少した状態(例えば、ガタが無い状態)に維持される。当該状態は、モータ9、11にトルクを発生させなくても維持される。
一方、クラッチ21を切った状態では、上述のガタにより衝撃を吸収することができる。
【0026】
本実施形態では、ロボットのリンク装置10は、ロボットの制御装置23により制御される。制御装置23は、第1および第2のモータ9、11の回転を制御するとともに、クラッチ21の動作を制御する。なお、制御装置23は、第1および第2のモータ9、11へそれぞれ電力を供給するモータドライバ25、27を制御することで、第1および第2のモータ9、11の回転を制御する。
【0027】
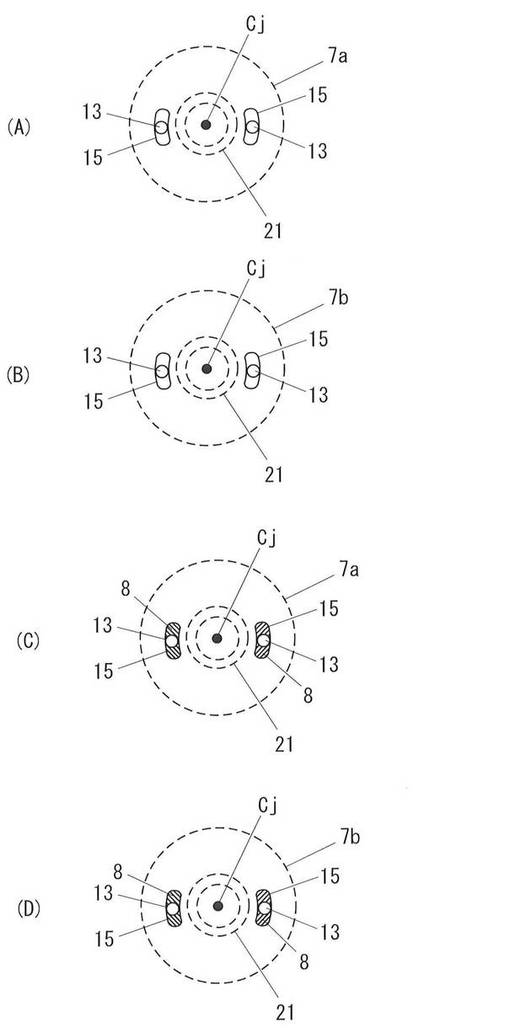
制御装置23は、第1のリンク3に対する第2のリンク5の回転角(姿勢)を、高精度に制御する時には、図3に示すステップS1〜S3を順に行う。
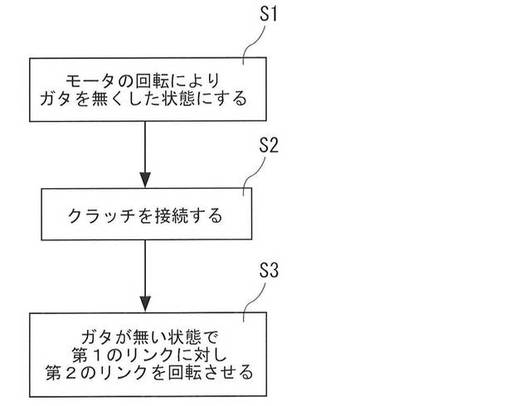
ステップS1において、制御装置23は、第1および第2のモータ9、11の回転角を制御することで、第1および第2の関節部7a、7bを逆方向に回転させる。これにより、ガタを減らす(例えば無くす)。例えば、図2の状態から図4の状態になる回転角まで、第1および第2の関節部7a、7bを逆方向に回転させる。図4(A)は、図1のA−A矢視図に対応するが、図2(A)の状態から第1の関節部7aが回転した状態を示す。図4(B)は、図1のB−B矢視図に対応するが、図2(B)の状態から第2の関節部7bが回転した状態を示す。
ステップS2において、制御装置23は、ステップS1によりガタを減らした(例えば無くした)状態でクラッチ21を接続する制御を行う。これにより、モータ9、11にトルクを発生させなくて、ガタを減らした(例えば無くした)状態が維持される。
ステップS3において、制御装置23は、第1および第2のモータ9、11の回転角を制御することで、第1および第2の関節部7a、7bを同じ方向に回転させる。これにより、第1のリンク3に対し第2のリンク5を回転させ、リンク装置10に所望の動作をさせる。従って、第1および第2のモータ9、11の両トルクを、リンク3、5の相対回転動作に使用することができる。
【0028】
本発明は上述した実施の形態に限定されず、本発明の要旨を逸脱しない範囲で種々変更を加え得ることは勿論である。例えば、以下のように変更例1〜3、追加特徴を採用してもよい。この場合、下記で述べない他の点は、上述と同じであってよい。
【0029】
(変更例1)
上述の実施形態において、クラッチ21を省略してもよい。この場合には、第1および第2の関節部7a、7bは、互いに分離されている。また、この場合、上述のステップS2、S3の代わりに、次のようにしてもよい。すなわち、回転角センサにより、第1および第2のモータ9、11の回転角を検出する。当該検出値に基づいて、制御装置23は、ステップS1でガタを減らした(または無くした)状態の第1および第2のモータ9、11の回転角の差を維持するように、第1および第2のモータ9、11の回転角を制御する。これにより、第1および第2の関節部7a、7bを同じ方向に回転させてもよい。このような制御で、第1のリンク3に対し第2のリンク5を回転させ、リンク装置10に所望の動作をさせる。
【0030】
(変更例2)
第1および第2モータ9、11の出力軸C1、C2を、それぞれ、ギアを介さずに関節部7a、7bに同軸に直結してもよい。
【0031】
(変更例3)
弾性体の代わりに、オイルダンパを設けてもよい。この場合、オイルダンパは、第1のリンク3と第1の関節部7aとの間、および、第1のリンク3と第2の関節部7bとの間に設けられる。これにより、第1または第2の関節部7a、7bが、前記ガタによる回転可能範囲内において、第1および第2のリンク3、5の前記一方に対し変位すると、この変位に伴ってオイルダンパは動作してよい。このオイルダンパの動作により衝撃が吸収される。
【0032】
(追加特徴)
第1のリンク3に対し第2のリンク5を回転動作させている時に、第1のモータ9について、下記(A)〜(C)の弾性変位制御を行い、これと同時に、第2のモータ11についても、同様の弾性変位制御を行う。これにより、第1および第2のモータ9、11のトルクを一定に制御することができる。
【0033】
第1および第2のリンク3、5の前記他方に対する第1の関節部7aの軸Cj周りの回転角をリンク回転角とし、第1のモータ9の回転角をモータ回転角とする。
(A)回転角センサにより、リンク回転角θαとモータ回転角θβとを検出する。
(B)検出したリンク回転角θαとモータ回転角θβを、次式(1)に適用することで、第1の関節部7aを、第1および第2のリンク3、5の前記一方に対して弾性変位させる上述の弾性体の変位Δθを求める。
Δθ=θα−N×θβ ・・・(1)
ここで、Nは、第1のモータ9と第1の関節部7aとの間の減速比であり、第1の関節部7aの前記ガタが一定である場合には、Δθ=一定となる。
(C)求めた変位Δθと変位の設定値とに基づいて、変位Δθが一定の当該設定値になるように、第1のモータ9の回転角を制御する。これにより、第1のモータ9のトルクが一定に制御される。
なお、上記(A)〜(C)を行う時には、クラッチ21を切断しておく。
【0034】
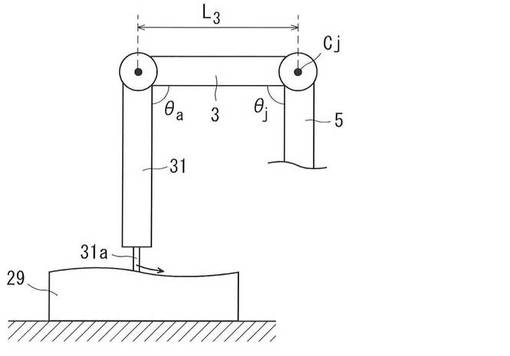
このような弾性変位制御は、例えば、次のような場合に行われてよい。図5のように、第1のリンク3に連結されたリンク31の先端に取り付けた接触部31aを一定の力で対象物29に押し付けながら、当該対象物29の表面に沿って接触部31aを移動させたい場合に、上述の弾性変位制御を行う。すなわち、図5の例では、リンク3、5、31の移動により対象物29の表面に沿って接触部31aを移動させる時に、上述の弾性変位制御を行うことで、接触部31aが一定の力で対象物29に押し付けられる。
図5において、θaは、リンク31とリンク3のなす角度を示し、θjは、リンク3とリンク5のなす角度を示し、θは、水平面とリンク31のなす角度を示す。
θa=θj=90°である場合に、上述の弾性体のバネ定数をkとすると、上述の弾性変位制御により、対象物29には、一定の力F=L3×k×Δθが接触部31aから作用することになる。ここで、k×Δθは、軸Cj周りに発生するトルクであり、L3は、リンク3の長さである。
【符号の説明】
【0035】
3 第1のリンク、5 第2のリンク、7 関節、7a 第1の関節部、
7b 第2の関節部、9 第1のモータ、10 ロボットのリンク装置、
11 第2のモータ、19a、19b ベベルギア、
21 クラッチ、23 制御装置
【技術分野】
【0001】
本発明は、ロボットの歩行脚またはアームとして機能するロボットのリンク装置に関する。
【背景技術】
【0002】
ロボットの歩行脚またはアームは、関節を介して互いに回転可能に連結される第1および第2のリンクにより構成される。このような第1および第2のリンクが、関節の軸周りに回転することで、ロボットの歩行脚またはアームが動作する。第1および第2のリンクが、歩行脚を構成する場合、これらリンクの回転動作によりロボットが歩行する。第1および第2のリンクが、アームを構成する場合、これらリンクの回転動作により、アームが所望の動作(仕事)をする。
【0003】
ロボットの動作により、上述の関節には、衝撃が作用する。例えば、歩行時に、各歩行脚は、床面から離れた後、再び、床面に着地する。この着地による衝撃力が関節に作用する。また、アームが動作中に障害物に衝突すると、衝撃力が関節に作用する。
【0004】
そのため、衝撃力を緩和するために、関節に、ガタ(遊び)や衝撃吸収部材を設けることが考えられる。
ガタの範囲内で、第1および第2のリンクが、互いに対し回転自在となる。さらに、関節に作用する衝撃力を吸収する衝撃吸収部材を設ける。衝撃吸収部材は、バネやダンパーなどである。この構成で、上述のガタの角度範囲内で、第1および第2のリンクを互いに回転させるような衝撃力が関節に作用した時、この衝撃力が、バネやダンパーに吸収される。
【0005】
本願の先行技術文献として、下記の非特許文献1がある。
【先行技術文献】
【非特許文献】
【0006】
【非特許文献1】日本ロボット学会 創立20周年記念学術講演会(2002年10月12〜14日) パンフレット
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかし、関節に、バネやダンパーなどを設ける場合には、高精度に、第1のリンクに対する第2のリンクの回転角(姿勢)を制御できない。モータの回転角制御により、第1のリンクに対する第2のリンクの回転角を制御しようとしても、当該回転角は、上述のガタ、およびバネやダンパーの影響で定まらない。また、バネやダンパーの影響を考慮すると、モータの回転角制御が複雑になる。
【0008】
そこで、本発明の目的は、ロボットの歩行脚またはアームとして機能するロボットのリンク装置において、関節にガタなどを設けても、高精度に、第1のリンクに対する第2のリンクの回転角を制御できるようにすることにある。
【課題を解決するための手段】
【0009】
上記目的を達成するため、本発明によると、ロボットの歩行脚またはアームとして機能するリンク装置であって、
歩行脚またはアームを構成する第1および第2のリンクと、
第1および第2のリンクを回転可能に連結する関節と、を備え、
前記関節は、該関節の軸方向一方側に設けられた第1の関節部と、該関節の軸方向他方側に設けられた第2の関節部と、を有し、
第1および第2の関節部は、第1および第2のリンクの一方に対し衝撃吸収用のガタをもって取り付けられ、第1および第2のリンクの他方に対し前記関節の軸周りに回転可能に取り付けられ、
さらに、前記他方に固定され、第1の関節部を前記軸周りに回転駆動する第1のモータと、
前記他方に固定され、第2の関節部を前記軸周りに回転駆動する第2のモータと、を備え、
第1および第2のモータは、第1および第2の関節部を同じ方向に回転駆動することで、第1のリンクに対し第2のリンクを回転させ、第1および第2の関節部を逆方向に回転駆動することで、当該回転方向の前記ガタの大きさを調整する、ことを特徴とするロボットのリンク装置が提供される。
【0010】
本発明の好ましい実施形態によると、第1および第2の関節部を同軸に連結可能なクラッチを備える。
【0011】
また、本発明の好ましい実施形態によると、第1および第2モータは、それぞれ、ベベルギアを介して第1および第2の関節部を回転駆動し、
前記各モータの軸が前記他方のリンクの長手方向を向いている。
【0012】
本発明の好ましい実施形態によると、リンク装置は、第1および第2のモータの回転角を制御する制御装置を備え、
該制御装置は、
(A)第1および第2のモータの回転角を制御することで、第1および第2の関節部を逆方向に回転させ、これにより、前記ガタを減らし、
(B)この状態で、前記クラッチを接続させ、
(C)その後、第1および第2のモータの回転角を制御することで、第1および第2の関節部を同じ方向に回転させ、これにより、第1のリンクに対し第2のリンクを回転させる。
【0013】
本発明の別の実施形態によると、第1および第2のモータの回転角を制御する制御装置を備え、
該制御装置は、
(A)第1および第2のモータの回転角を制御することで、第1および第2の関節部を逆方向に回転させ、これにより、上記のガタを減らし、
(B)この状態における第1および第2のモータの回転角の差を維持するように、第1および第2のモータの回転角を制御することで、第1および第2の関節部を同じ方向に回転させ、これにより、第1のリンクに対し第2のリンクを回転させる。
【発明の効果】
【0014】
上述した本発明によると、第1および第2の関節部をそれぞれ回転駆動する第1および第2のモータは、第1および第2の関節部を同じ方向に回転駆動することで、第1および第2のリンクを互いに対し回転動作させ、第1および第2の関節部を逆方向に回転駆動することで、当該回転方向のガタの大きさを調整する。
従って、まず、第1および第2の関節部を逆方向に回転駆動することでガタを減らし、この状態を維持しながら、第1および第2の関節部を同じ方向に回転駆動することで、高精度に、第1のリンクに対する第2のリンクの回転角を制御することができる。また、第1および第2の関節部を逆方向に回転駆動することでガタを大きくし、これにより、関節部に作用する衝撃力を緩和することができる。
【0015】
第1および第2のモータで、第1および第2のリンクの相対回転とガタの制御との両方を実行するので、ガタを制御するために、第1および第2のモータ以外のアクチュエータを設けなくて済む。
さらに、第1および第2のモータにより第1および第2の関節部を同じ方向に回転駆動することで、第1および第2のリンクを互いに対し回転動作させるので、第1および第2のモータの両トルクを、第1および第2のリンクの相対回転動作に使用することができる。
【図面の簡単な説明】
【0016】
【図1】本発明の実施形態によるロボットのリンク装置を示す。
【図2】(A)は、図1のA−A矢視図であり、(B)は、図1のB−B矢視図であり、(C)は、(A)において弾性体をゴムにした場合を示し、(D)は、(B)において弾性体をゴムにした場合を示す。
【図3】本発明の実施形態によるリンク装置の動作制御を示すフローチャートである。
【図4】(A)は、図2(A)の状態から第1の関節部がガタの分だけ回転した状態を示し、(B)は、図2(B)の状態から第2の関節部がガタの分だけ回転した状態を示す。
【図5】本発明の実施形態によるリンク装置の他の制御を説明するための図である。
【発明を実施するための形態】
【0017】
本発明の好ましい実施形態を図面に基づいて説明する。なお、各図において共通する部分には同一の符号を付し、重複した説明を省略する。
【0018】
図1は、本発明の実施形態によるロボットのリンク装置10の構成図である。ロボットのリンク装置10は、産業ロボットの歩行脚またはアームとして機能する。
【0019】
リンク装置10は、図1に示すように、歩行脚またはアームを構成する第1および第2のリンク3、5と、第1および第2のリンク3、5を回転可能に連結する関節7と、を備える。
【0020】
関節7は、該関節の軸Cj方向における一方側に設けられた第1の関節部7aと、該軸Cj方向における他方側に設けられた第2の関節部7bと、を有する。第1および第2の関節部7a、7bは、第1および第2のリンク3、5の一方(図1の例では、第1のリンク3)に対し衝撃吸収用のガタをもって連結され、第1および第2のリンク3、5の他方(図1の例では、第2のリンク5)に対し関節7の軸Cj周りに回転可能に連結される。上記のガタ(遊び)の分だけ、第1および第2の関節部7a、7bは、第1および第2のリンク3、5の一方に対し回転可能である。なお、第1および第2の関節部7a、7bは、第1および第2のリンク3、5の他方に取り付けられた軸受6により軸Cj周りに回転可能に支持される。
【0021】
ロボットのリンク装置10は、第1および第2のリンク3、5の他方に固定された第1および第2のモータ9、11を備える。第1のモータ9は、第1の関節部7aを軸Cj周りに回転駆動する。第2のモータ11は、第2の関節部7bを軸Cj周りに回転駆動する。第1および第2のモータ9、11は、例えばサーボモータであってよい。第1および第2のモータ9、11は、正逆回転可能である。
第1および第2のモータ9、11は、第1および第2の関節部7a、7bを同じ方向に回転駆動することで、第1のリンク3を第2のリンク5に対し回転させる。図1の例では、第1および第2のモータ9、11は、互いに逆向きに回転することで、第1および第2の関節部7a、7bを同じ方向に回転駆動して、第1のリンク3を第2のリンク5に対し回転させる。
一方、第1および第2のモータ9、11は、第1および第2の関節部7a、7bを逆方向に回転駆動することで、前記ガタの範囲で、第1および第2の関節部7a、7bを、第1および第2のリンク3、5の前記一方に対し回転して当該回転方向の前記ガタの大きさを調整する(すなわち、ガタを減少または増加させる)。図1の例では、第1および第2のモータ9、11は、同じ向きに回転することで、第1および第2の関節部7a、7bを逆方向に回転駆動して前記ガタの大きさを調整する。
【0022】
上記のガタは、例えば、図1、図2のようにピン13と長孔15によって設けられてよい。図2(A)は、図1のA−A矢視図である。図2(B)は、図1のB−B矢視図である。
ピン13は、第1の関節部7aに固定されている。ピン13は、第1および第2のリンク3、5の一方(図1、2の例では、第1のリンク3)に形成された長孔15に挿入されている。長孔15は、第1の関節部7aの回転方向に、前記ガタに相当する長さだけ延びている。従って、ピン13が、長孔15内を、長孔15の長さ分だけ自在に移動できるので、第1の関節部7aは、当該長さ(ガタ)の分だけ回転可能に第1および第2のリンク3、5の一方(図1、2の例では、第1のリンク3)に連結される。このように、第1の関節部7aは、ピン13と長孔15を介して第1および第2のリンク3、5の一方に連結される。
第2の関節部7bも、第1の関節部7aと同様に、ガタ(遊び)の分だけ回転可能に、ピン13と長孔15を介して第1および第2のリンク3、5の一方に連結される。
【0023】
ロボットのリンク装置10は、好ましくは、第1および第2の関節部7a、7bを、第1および第2のリンク3、5の前記一方に対して弾性変位させる弾性体を備える。この弾性変位の範囲は、上述のガタの範囲内であり、この弾性変位の方向は、第1および第2の関節部7a、7bの回転方向(軸Cj周りの方向)である。この弾性体により、第1および第2の関節部7a、7bは、衝撃力が作用すると弾性変位する。その結果、衝撃を緩和することができる。
弾性体は、例えば、バネであり、バネの一端は第1の関節部7aに結合され、バネの他端は、第1および第2のリンク3、5の一方(図1の例では、第1のリンク3)に結合される。
なお、弾性体は、バネに限定されず、他の弾性体(例えばゴム)であってもよい。図2(C)、(D)は、それぞれ、図2(A)、(B)において、上記の弾性体をゴム8とした場合を示す。図2(C)、(D)において、斜線で示されたゴム8は、長孔15の内周面に取り付けられるように長孔15内に充填されている。
【0024】
第1および第2のモータ9、11は、それぞれ、ベベルギア19a、19b(傘歯車)を介して第1および第2の関節部7a、7bを回転駆動する。これにより、各モータ9、11の軸C1、C2が第1または第2のリンク3、5の長手方向を向くようにすることができるので、各モータ9、11を、第1または第2のリンク3、5の内部に配置できる。なお、図1の例では、ベベルギア19aは、モータ9、11の出力軸に固定されており、ベベルギア19bは、ベベルギア19aに噛み合うように第1および第2の関節部7a、7bに固定されている。前記長手方向は、軸Cj方向と直交する。
【0025】
本実施形態では、ロボットのリンク装置10は、第1および第2の関節部7a、7bを同軸に連結可能なクラッチ21を備える。
上述のガタを減らした(例えば、無くした)状態で、クラッチ21により、第1および第2の関節部7a、7bを連結すると、ガタが減少した状態(例えば、ガタが無い状態)に維持される。当該状態は、モータ9、11にトルクを発生させなくても維持される。
一方、クラッチ21を切った状態では、上述のガタにより衝撃を吸収することができる。
【0026】
本実施形態では、ロボットのリンク装置10は、ロボットの制御装置23により制御される。制御装置23は、第1および第2のモータ9、11の回転を制御するとともに、クラッチ21の動作を制御する。なお、制御装置23は、第1および第2のモータ9、11へそれぞれ電力を供給するモータドライバ25、27を制御することで、第1および第2のモータ9、11の回転を制御する。
【0027】
制御装置23は、第1のリンク3に対する第2のリンク5の回転角(姿勢)を、高精度に制御する時には、図3に示すステップS1〜S3を順に行う。
ステップS1において、制御装置23は、第1および第2のモータ9、11の回転角を制御することで、第1および第2の関節部7a、7bを逆方向に回転させる。これにより、ガタを減らす(例えば無くす)。例えば、図2の状態から図4の状態になる回転角まで、第1および第2の関節部7a、7bを逆方向に回転させる。図4(A)は、図1のA−A矢視図に対応するが、図2(A)の状態から第1の関節部7aが回転した状態を示す。図4(B)は、図1のB−B矢視図に対応するが、図2(B)の状態から第2の関節部7bが回転した状態を示す。
ステップS2において、制御装置23は、ステップS1によりガタを減らした(例えば無くした)状態でクラッチ21を接続する制御を行う。これにより、モータ9、11にトルクを発生させなくて、ガタを減らした(例えば無くした)状態が維持される。
ステップS3において、制御装置23は、第1および第2のモータ9、11の回転角を制御することで、第1および第2の関節部7a、7bを同じ方向に回転させる。これにより、第1のリンク3に対し第2のリンク5を回転させ、リンク装置10に所望の動作をさせる。従って、第1および第2のモータ9、11の両トルクを、リンク3、5の相対回転動作に使用することができる。
【0028】
本発明は上述した実施の形態に限定されず、本発明の要旨を逸脱しない範囲で種々変更を加え得ることは勿論である。例えば、以下のように変更例1〜3、追加特徴を採用してもよい。この場合、下記で述べない他の点は、上述と同じであってよい。
【0029】
(変更例1)
上述の実施形態において、クラッチ21を省略してもよい。この場合には、第1および第2の関節部7a、7bは、互いに分離されている。また、この場合、上述のステップS2、S3の代わりに、次のようにしてもよい。すなわち、回転角センサにより、第1および第2のモータ9、11の回転角を検出する。当該検出値に基づいて、制御装置23は、ステップS1でガタを減らした(または無くした)状態の第1および第2のモータ9、11の回転角の差を維持するように、第1および第2のモータ9、11の回転角を制御する。これにより、第1および第2の関節部7a、7bを同じ方向に回転させてもよい。このような制御で、第1のリンク3に対し第2のリンク5を回転させ、リンク装置10に所望の動作をさせる。
【0030】
(変更例2)
第1および第2モータ9、11の出力軸C1、C2を、それぞれ、ギアを介さずに関節部7a、7bに同軸に直結してもよい。
【0031】
(変更例3)
弾性体の代わりに、オイルダンパを設けてもよい。この場合、オイルダンパは、第1のリンク3と第1の関節部7aとの間、および、第1のリンク3と第2の関節部7bとの間に設けられる。これにより、第1または第2の関節部7a、7bが、前記ガタによる回転可能範囲内において、第1および第2のリンク3、5の前記一方に対し変位すると、この変位に伴ってオイルダンパは動作してよい。このオイルダンパの動作により衝撃が吸収される。
【0032】
(追加特徴)
第1のリンク3に対し第2のリンク5を回転動作させている時に、第1のモータ9について、下記(A)〜(C)の弾性変位制御を行い、これと同時に、第2のモータ11についても、同様の弾性変位制御を行う。これにより、第1および第2のモータ9、11のトルクを一定に制御することができる。
【0033】
第1および第2のリンク3、5の前記他方に対する第1の関節部7aの軸Cj周りの回転角をリンク回転角とし、第1のモータ9の回転角をモータ回転角とする。
(A)回転角センサにより、リンク回転角θαとモータ回転角θβとを検出する。
(B)検出したリンク回転角θαとモータ回転角θβを、次式(1)に適用することで、第1の関節部7aを、第1および第2のリンク3、5の前記一方に対して弾性変位させる上述の弾性体の変位Δθを求める。
Δθ=θα−N×θβ ・・・(1)
ここで、Nは、第1のモータ9と第1の関節部7aとの間の減速比であり、第1の関節部7aの前記ガタが一定である場合には、Δθ=一定となる。
(C)求めた変位Δθと変位の設定値とに基づいて、変位Δθが一定の当該設定値になるように、第1のモータ9の回転角を制御する。これにより、第1のモータ9のトルクが一定に制御される。
なお、上記(A)〜(C)を行う時には、クラッチ21を切断しておく。
【0034】
このような弾性変位制御は、例えば、次のような場合に行われてよい。図5のように、第1のリンク3に連結されたリンク31の先端に取り付けた接触部31aを一定の力で対象物29に押し付けながら、当該対象物29の表面に沿って接触部31aを移動させたい場合に、上述の弾性変位制御を行う。すなわち、図5の例では、リンク3、5、31の移動により対象物29の表面に沿って接触部31aを移動させる時に、上述の弾性変位制御を行うことで、接触部31aが一定の力で対象物29に押し付けられる。
図5において、θaは、リンク31とリンク3のなす角度を示し、θjは、リンク3とリンク5のなす角度を示し、θは、水平面とリンク31のなす角度を示す。
θa=θj=90°である場合に、上述の弾性体のバネ定数をkとすると、上述の弾性変位制御により、対象物29には、一定の力F=L3×k×Δθが接触部31aから作用することになる。ここで、k×Δθは、軸Cj周りに発生するトルクであり、L3は、リンク3の長さである。
【符号の説明】
【0035】
3 第1のリンク、5 第2のリンク、7 関節、7a 第1の関節部、
7b 第2の関節部、9 第1のモータ、10 ロボットのリンク装置、
11 第2のモータ、19a、19b ベベルギア、
21 クラッチ、23 制御装置
【特許請求の範囲】
【請求項1】
ロボットの歩行脚またはアームとして機能するリンク装置であって、
歩行脚またはアームを構成する第1および第2のリンクと、
第1および第2のリンクを回転可能に連結する関節と、
前記関節は、該関節の軸方向一方側に設けられた第1の関節部と、該関節の軸方向他方側に設けられた第2の関節部と、を有し、
第1および第2の関節部は、第1および第2のリンクの一方に対し衝撃吸収用のガタをもって取り付けられ、第1および第2のリンクの他方に対し前記関節の軸周りに回転可能に取り付けられ、
さらに、前記他方に固定され、第1の関節部を前記軸周りに回転駆動する第1のモータと、
前記他方に固定され、第2の関節部を前記軸周りに回転駆動する第2のモータと、を備え、
第1および第2のモータは、第1および第2の関節部を同じ方向に回転駆動することで、第1のリンクに対し第2のリンクを回転させ、第1および第2の関節部を逆方向に回転駆動することで、当該回転方向の前記ガタの大きさを調整する、ことを特徴とするロボットのリンク装置。
【請求項2】
第1および第2の関節部を同軸に連結可能なクラッチを備える、ことを特徴とする請求項1に記載のロボットのリンク装置。
【請求項3】
第1および第2モータは、それぞれ、ベベルギアを介して第1および第2の関節部を回転駆動し、
前記各モータの軸が前記他方のリンクの長手方向を向いている、ことを特徴とする請求項1または2に記載のロボットのリンク装置。
【請求項4】
第1および第2のモータの回転角を制御する制御装置を備え、
該制御装置は、
(A)第1および第2のモータの回転角を制御することで、第1および第2の関節部を逆方向に回転させ、これにより、前記ガタを減らし、
(B)この状態で、前記クラッチを接続させ、
(C)その後、第1および第2のモータの回転角を制御することで、第1および第2の関節部を同じ方向に回転させ、これにより、第1のリンクに対し第2のリンクを回転させる、ことを特徴とする請求項2に記載のロボットのリンク装置。
【請求項5】
第1および第2のモータの回転角を制御する制御装置を備え、
該制御装置は、
(A)第1および第2のモータの回転角を制御することで、第1および第2の関節部を逆方向に回転させ、これにより、上記のガタを減らし、
(B)この状態における第1および第2のモータの回転角の差を維持するように、第1および第2のモータの回転角を制御することで、第1および第2の関節部を同じ方向に回転させ、これにより、第1のリンクに対し第2のリンクを回転させる、ことを特徴とする請求項1に記載のロボットのリンク装置。
【請求項1】
ロボットの歩行脚またはアームとして機能するリンク装置であって、
歩行脚またはアームを構成する第1および第2のリンクと、
第1および第2のリンクを回転可能に連結する関節と、
前記関節は、該関節の軸方向一方側に設けられた第1の関節部と、該関節の軸方向他方側に設けられた第2の関節部と、を有し、
第1および第2の関節部は、第1および第2のリンクの一方に対し衝撃吸収用のガタをもって取り付けられ、第1および第2のリンクの他方に対し前記関節の軸周りに回転可能に取り付けられ、
さらに、前記他方に固定され、第1の関節部を前記軸周りに回転駆動する第1のモータと、
前記他方に固定され、第2の関節部を前記軸周りに回転駆動する第2のモータと、を備え、
第1および第2のモータは、第1および第2の関節部を同じ方向に回転駆動することで、第1のリンクに対し第2のリンクを回転させ、第1および第2の関節部を逆方向に回転駆動することで、当該回転方向の前記ガタの大きさを調整する、ことを特徴とするロボットのリンク装置。
【請求項2】
第1および第2の関節部を同軸に連結可能なクラッチを備える、ことを特徴とする請求項1に記載のロボットのリンク装置。
【請求項3】
第1および第2モータは、それぞれ、ベベルギアを介して第1および第2の関節部を回転駆動し、
前記各モータの軸が前記他方のリンクの長手方向を向いている、ことを特徴とする請求項1または2に記載のロボットのリンク装置。
【請求項4】
第1および第2のモータの回転角を制御する制御装置を備え、
該制御装置は、
(A)第1および第2のモータの回転角を制御することで、第1および第2の関節部を逆方向に回転させ、これにより、前記ガタを減らし、
(B)この状態で、前記クラッチを接続させ、
(C)その後、第1および第2のモータの回転角を制御することで、第1および第2の関節部を同じ方向に回転させ、これにより、第1のリンクに対し第2のリンクを回転させる、ことを特徴とする請求項2に記載のロボットのリンク装置。
【請求項5】
第1および第2のモータの回転角を制御する制御装置を備え、
該制御装置は、
(A)第1および第2のモータの回転角を制御することで、第1および第2の関節部を逆方向に回転させ、これにより、上記のガタを減らし、
(B)この状態における第1および第2のモータの回転角の差を維持するように、第1および第2のモータの回転角を制御することで、第1および第2の関節部を同じ方向に回転させ、これにより、第1のリンクに対し第2のリンクを回転させる、ことを特徴とする請求項1に記載のロボットのリンク装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−16752(P2012−16752A)
【公開日】平成24年1月26日(2012.1.26)
【国際特許分類】
【出願番号】特願2010−153572(P2010−153572)
【出願日】平成22年7月6日(2010.7.6)
【出願人】(500302552)株式会社IHIエアロスペース (298)
【出願人】(000000099)株式会社IHI (5,014)
【Fターム(参考)】
【公開日】平成24年1月26日(2012.1.26)
【国際特許分類】
【出願日】平成22年7月6日(2010.7.6)
【出願人】(500302552)株式会社IHIエアロスペース (298)
【出願人】(000000099)株式会社IHI (5,014)
【Fターム(参考)】
[ Back to top ]