
ロボットの停止方法およびロボットシステム
【課題】複数台のロボットのうち、停止させようとするロボットが実際にどのロボットであるかを識別できるようにする。
【解決手段】複数台のロボット2〜5を制御する制御装置6の教示装置7を操作して1台のロボットを選択すると、選択されたロボットを除く他の全てのロボットの移動速度が減少する(告知動作)。この告知動作により、選択したロボットを識別できる。告知動作しないロボットが停止させようとしていたロボットと一致した場合、教示装置7により停止操作すると、そのロボットは停止される。告知動作しないロボットと停止させようとしていたロボットが異なる場合、教示装置7を操作しないでおくと、告知動作しなかったロボットが減速して告知動作したロボットと作業動作を終了する時点が同じ時期となる。
【解決手段】複数台のロボット2〜5を制御する制御装置6の教示装置7を操作して1台のロボットを選択すると、選択されたロボットを除く他の全てのロボットの移動速度が減少する(告知動作)。この告知動作により、選択したロボットを識別できる。告知動作しないロボットが停止させようとしていたロボットと一致した場合、教示装置7により停止操作すると、そのロボットは停止される。告知動作しないロボットと停止させようとしていたロボットが異なる場合、教示装置7を操作しないでおくと、告知動作しなかったロボットが減速して告知動作したロボットと作業動作を終了する時点が同じ時期となる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、複数台のロボットのうちから1台のロボットを選択して停止させる場合のロボットの停止方法およびロボットシステムに関する。
【背景技術】
【0002】
製造ラインに沿って複数台のロボットを設置し、これらロボットに組み立て作業などを行わせるシステムがある。このロボットシステムにおいて、例えば、調子の悪いロボットを発見したような場合、そのロボットを停止させて点検修理を行う必要がある。
複数台のロボットが1台の制御装置によって一括制御されている場合、複数台のロボットのうちから或る特定のロボットを停止させるには、制御装置に接続された教示装置により停止させたいロボットを選択して停止操作する。
【0003】
本発明とは直接の関係はないが、特許文献1には、ロボットアームに表示器を取り付け、教示装置によってロボットアームを動かす際に、表示器によって移動方向を表示し、これによってロボットアームの動作方向を事前に確認できるようにすることが記載されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−878号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
教示装置で特定のロボットを選択するには、そのロボットが制御装置上で何番のロボットであるかを知らないと、間違えて他のロボットを停止させてしまう恐れがある。しかし、何番のロボットかをユーザーの記憶に頼ることは間違いの原因になり、好ましくない。かといって、動作中のロボットに近寄って何番かをユーザー自身で確認することは、ロボットと衝突の恐れがあって危険である。
【0006】
特許文献1に開示された技術を応用してロボットに表示器を設け、教示装置によって1台のロボットを選択すると、その選択されたロボットの表示器が選択されたことを表示するように構成することが考えられる。しかし、ロボットの姿勢や設備環境によっては制御装置が置かれた位置からロボットの表示器が見えない場合があり、事前確認手段としては好ましいものではない。
【0007】
本発明は上記の事情に鑑みてなされたもので、その目的は、選択したロボットが実際にどのロボットであるかを、ロボットの姿勢や設備環境のいかんにかかわらず識別できるロボットの停止方法およびロボットシステムを提供することにある。
【課題を解決するための手段】
【0008】
本発明によれば、ユーザーが操作装置の選択手段により1台のロボットを選択すると、選択されたロボット以外の他のロボットの移動速度が低下、例えば加速途中にあるロボットの加速度が減少し、或いは等速移動していたロボットの移動速度が減少する。従って、ユーザーが操作装置上で選択した停止対象ロボットを見つけるには、移動速度が減少することなく通常通り動作するロボットを見つければ良い。
【0009】
そして、ユーザーが停止させたいと思ったロボットが通常通り動作するロボット(停止対象ロボット)と一致した場合、ユーザーはそのロボットを停止する操作を行う。通常通り動作するロボットが、ユーザーが停止させたいと思ったロボットでなかった場合、ユーザーは停止操作をしない。停止操作がされない場合には、その後、停止対象ロボットが減速し、先に減速した他のロボットと同じ時期に作業動作を終了することとなる。これにより、複数のロボットの全てが同時期にロボット作業を終了するようになり、次のロボット作業において全てのロボットが同時期に動作を開始できるように復旧する。
【図面の簡単な説明】
【0010】
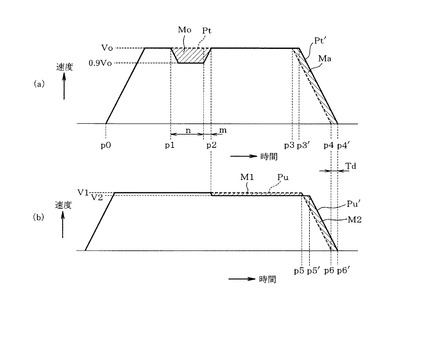
【図1】本発明の一実施形態における告知動作と復旧動作の一例を示すもので、(a)は告知対象ロボットの速度パターン図、(b)は停止対象ロボットの速度パターン図
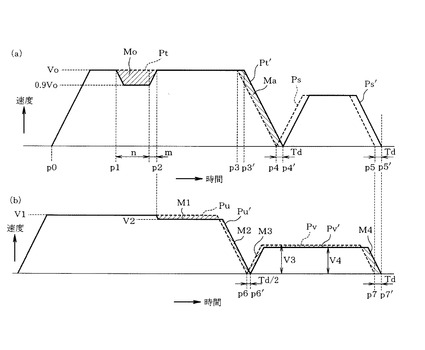
【図2】告知動作と復旧動作の他の例を示すもので、(a)は告知対象ロボットの速度パターン図、(b)は停止対象ロボットの速度パターン図
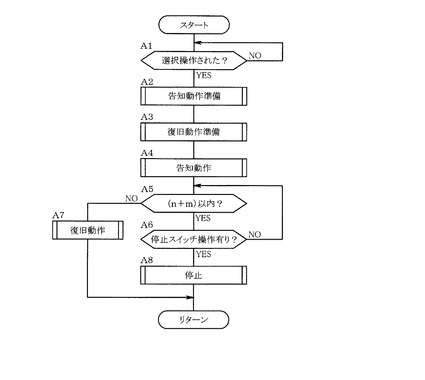
【図3】主制御の内容を示すフローチャート
【図4】停止指示対応ルーチンの内容を示すフローチャート
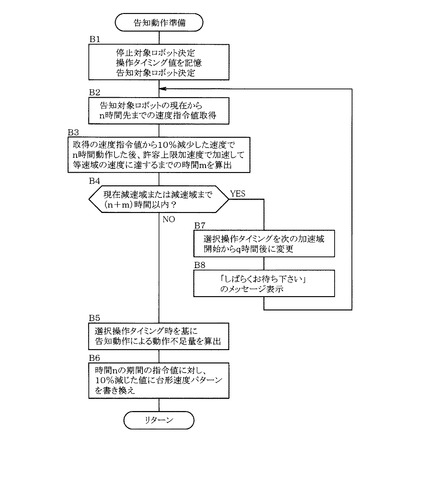
【図5】告知動作準備ルーチンの内容を示すフローチャート
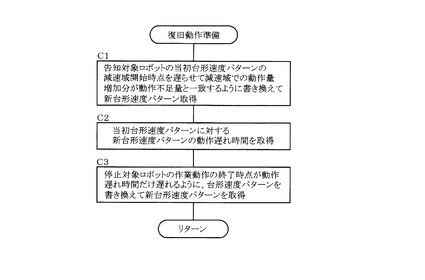
【図6】復旧動作準備ルーチンの内容を示すフローチャート
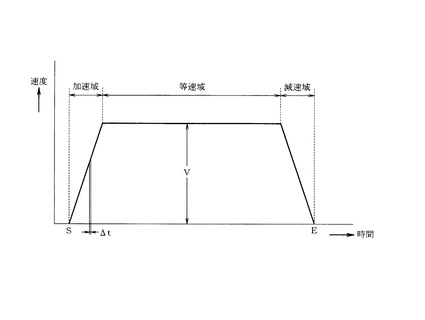
【図7】一般的な台形速度パターン図
【図8】作業サイクルの内容を示す速度パターン図
【図9】制御装置の電気的構成を示すブロック図
【図10】2台のロボットの共有範囲を示す模式図
【図11】ロボットシステムを示す概略図
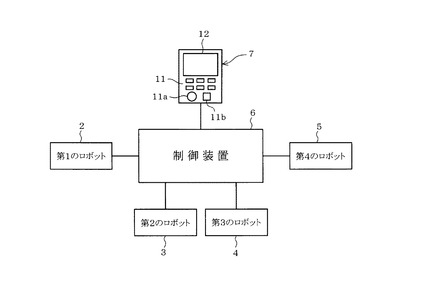
【図12】ロボットシステムの電気的接続関係を示すブロック図
【発明を実施するための形態】
【0011】
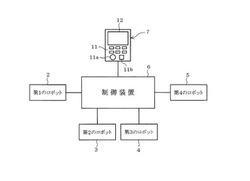
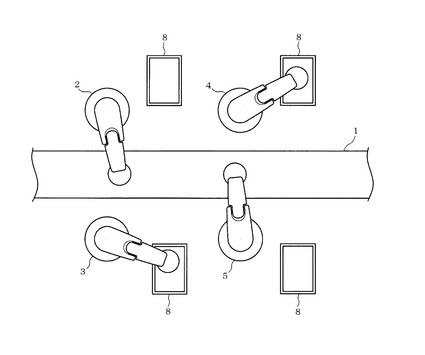
以下、本発明の一実施形態を図面により説明する。本実施形態におけるロボットシステムは、図11および図12に示すように、製品を搬送するコンベア(製造ライン)1の両側に設置された複数台、この実施形態では4台のロボット2〜5と、これらロボット2〜5を一括して制御する制御装置6と、制御装置6に接続された操作装置としての教示装置7とから構成されている。なお、各ロボット2〜5を区別する場合には、第1〜第4の順番号を付して説明する。
【0012】
ロボット2〜5は、いずれも6軸の垂直多関節型ロボットとして構成されている。これらロボット2〜5は、ロボットアーム先端に、ワークを把持するハンドなどのエンドエフェクタ(図示せず)が取り付けられている。そして、各ロボット2〜5は、コンベア1が1ピッチ間欠的に送られる都度、自動供給装置8から定位置に供給される部品を把持してコンベア1上に搬送し、製品に組み付けるという作業を行う。
【0013】
教示装置7は主としてロボット2〜5を手動で操作する際に使用する。この教示装置7には、各種スイッチ11、表示器(表示手段)12が設けられている。上記スイッチ11には、教示モード、自動動作モードなどのモード選択を行うためのモード選択スイッチ、4台のロボット2〜5のうちから所望する1台のロボットを選択するためのロボット選択スイッチ(選択手段)、教示モード時にロボットアームを動かすための動作指示スイッチ、自動動作モードのとき選択したロボットを停止させるための停止スイッチ(停止指示手段)などが含まれている。そのうち、図12には、ロボット選択スイッチを符号11aで、停止スイッチを符号11bで示した。
【0014】
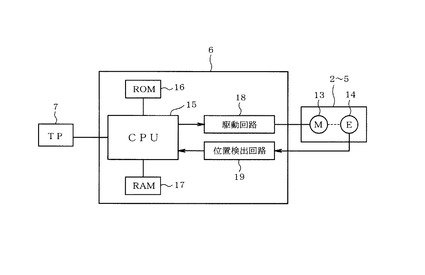
次に、制御装置6の構成を示す図9において、各ロボット2〜5は、アームを駆動するための6台のモータ13を有し、各モータ13には、当該モータ13の回転位置を検出して制御装置6に出力するロータリーエンコーダ14が連結されている。なお、図9では、制御装置6と1台のロボットとの関係を示し、また、1台のロボットにおいてもモータ13は1台のみ示した。
【0015】
制御装置6は、CPU15、記憶手段としてのROM16およびRAM17を備える他、モータ13の駆動回路18およびロータリーエンコーダ14からの回転位置検出信号によりロボットの各アームの回転位置を検出する位置検出回路19を備えている。ROM16には、ロボット2〜5を教示装置7により作成された動作プログラムに従って自動動作させるための制御プログラム、自動動作中のロボット2〜5を教示装置7からの指示によって停止させる際の制御プログラム、ロボット2〜5の速度制御や位置制御の際に用いられる各種のデータなどが記憶されている。また、RAM17には、教示装置7により作成された動作プログラムなどが記憶される。
【0016】
CPU15は、RAM17に記憶された動作プログラムから移動軌跡を演算し、ロボットアーム先端がこの軌跡に沿って移動するように当該ロボットアーム先端の位置と速度を制御する。
具体的には、GPU15は、ロボットアーム先端の移動速度を速度パターン、例えば台形速度パターンに当て嵌めて決定する。この場合、台形速度パターンは、図7に示すように、加速域、等速域、減速域からなるが、加速域における加速度+α、等速域における速度V、減速域における減速度−αは動作プログラムに記録されたパラメータから決定される。
【0017】
そして、CPU15は、移動開始時点Sから移動終了時点Eまでの間、台形速度パターンから所定のサンプリング周期(時間)Δt経過毎の速度を算出すると共に、移動開始時点Sからの移動距離を算出する。なお、移動距離は速度の積分値(サンプリング時間Δt毎の速度とΔt時間の積の総和)として求めることができる。
【0018】
CPU15は、サンプリング時間Δt経過毎に、移動開始時点Sからの移動距離だけ移動したときの位置(座標)を移動軌跡から算出し、求めたサンプリング時間Δt経過毎のロボットアーム先端の位置(指令位置)と速度(指令速度)から、各アームの位置と速度を演算し、これを各アームのサンプリング時間Δt経過毎の目標位置および目標速度とする。そして、CPU15は、位置検出回路19から取得した各アームの現在の位置および速度が、目標位置および目標速度となるように駆動回路18を介してモータ13を制御する。以上により、ロボットアーム先端が、動作プログラムにより定められた軌跡上を、台形速度パターンに従った速度で移動するように制御される。
【0019】
ここで、台形速度パターンにおいて、加速度+α、減速度−α、等速域での速度Vはロボットアームが強度上耐え得る最大加速度、最大減速度、最高速度に一定の安全率を見込んだ許容上限加速度+αmax、許容下限減速度−αmax、許容上限速度Vmax以下に定められる。なお、モータ13はロボットアームの駆動源であるが、同時に逆転トルク制動(逆転トルクを発生して制動)によってロボットアームを制動する制動手段としても機能する。
【0020】
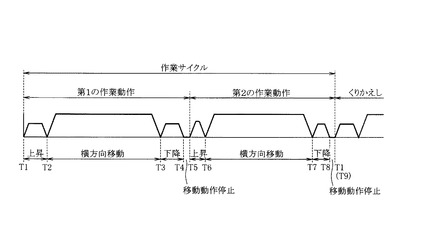
図8は、ロボット2〜5の自動動作時におけるロボットアーム先端の速度パターンの一例を示している。図8において、T1〜T2は上昇動作時、T2からT3は横方向移動動作時、T3〜T4は下降動作時、T4〜T5は移動動作停止時、T5〜T6は上昇動作時、T6〜T7は横方向移動動作時、T7〜T8は下降動作時、T8〜T9=T1は移動動作停止時を示している。
【0021】
この図8では、T1からT5までが第1の作業動作、T5からT9までが第2の作業動作で、この2つの作業動作を1作業サイクルとしている。そして、自動動作時には、この作業サイクルを繰り返し実行する。
【0022】
この図8の1作業サイクルを各ロボット2〜4に当てはめてみる。まず、第1のロボット2および第4のロボット5は、自動供給装置8から供給されるワークを把持してT1〜T2で上昇し、T2〜T3でワークを自動供給装置8からコンベア1上に搬送し、T3〜T4でコンベアの製品までワークを下降させ、T4〜T5の移動動作停止時でワークの把持を解除する(第1の作業動作)。その後、T5〜T6でコンベア1から上方に離れ、T6〜T7でコンベア1上から自動供給装置8上まで移動し、T7〜T8で自動供給装置8により定位置に供給されたワークまで下降し、T8〜T9の移動動作停止時でワークを把持する(第2の作業動作)。
【0023】
これに対し、第2のロボット3および第3のロボット4は、T1〜T2でコンベア1から上方に離れ、T2〜T3でコンベア1上から自動供給装置8上まで移動し、T3〜T4で自動供給装置8により定位置に供給されたワークまで下降し、T4〜T5の移動動作停止時でワークを把持する(第1の作業動作)。その後、T5〜T6でワークを把持したまま上昇し、T6〜T7でワークを自動供給装置8からコンベア1上に搬送し、T7〜T8でコンベアの製品までワークを下降させ、T8〜T9の移動動作停止時でワークの把持を解除する(第2の作業動作)。
【0024】
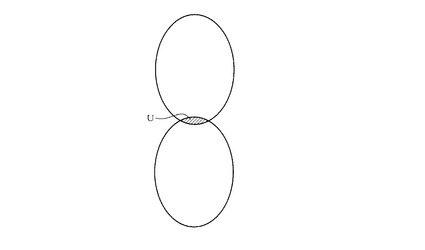
従って、第1のロボット2と第2のロボット3、第3のロボット4と第4のロボット5とは、通常は、コンベア1に対し、一方が近付くときは、他方が遠ざかるという動作関係を保持するように制御装置6よって制御されるので、衝突の恐れはない。しかし、第1のロボット2と第2のロボット3、第3のロボット4と第4のロボット5とは、図10に示すようにコンベア1上で動作範囲(楕円で示す)を共有する領域(共有領域)Uがあるので、動作のタイミングがずれると、共有領域Uで衝突する可能性が生ずる。
【0025】
ところで、ロボット2〜5の自動動作中、例えばユーザーが異常だと感じたロボットがあった場合、異常の程度によっては、そのロボットを停止させて、点検を行うことが必要になってくる。この場合、ロボットの停止操作は教示装置7によって行う。例えば、第1のロボット2を停止させる場合、選択スイッチ11aを操作して第1のロボット2に割り当てられている番号を選択し、停止スイッチ11aを操作する。
【0026】
しかし、第1のロボット2が教示装置7上でも第1番のロボットであるかは確かではない。例えば、図11において、第1のロボット2の位置に設置されたロボットが第1番、第2のロボット3の位置に設置されたロボットが第2番に定められるとした場合、実際に工場に据え付ける際に、何らかの理由で、互いに逆の位置に設置(第1のロボット2の位置に第2のロボット3が設置、第2のロボット3の位置に第1のロボット2が設置)されることもある。この場合、第1のロボット2を停止させたいとして、第1番のロボットを選択して停止操作を行うと、第2のロボット3が停止してしまうという不具合を生ずる。
【0027】
このような不具合の発生を防止し、停止させるべきロボットを間違いなく停止させることができるようにするために、本発明では、教示装置7上で停止させるものとして選択されたロボット(操作装置上での停止対象ロボット)を除く他の複数台のロボット(告知対象ロボット)に、停止対象ロボットでないことを告知する告知動作を行わせ、ユーザーが停止させたいと思ったロボットと、告知動作せず通常通り動作する1台のロボットとが一致した場合、停止操作を行うようにしている。
【0028】
次に、ロボット2〜5の自動動作中に、1台のロボットを停止させる場合の制御装置6の制御内容を図3〜図6のフローチャートをも参照しながら説明する。自動動作モードにおいて、各ロボット2〜5は、複数の移動動作を含む複数の作業動作からなる作業サイクル、つまり図8に示された上昇・横方向移動・下降の移動動作を含む第1の作業動作と第2の作業動作からなる作業サイクルを繰り返し実行している。
【0029】
この自動動作時において、制御装置6は、各ロボット2〜5のロボットアーム先端の位置と速度を、前述のように指令位置と指令速度によって制御する図3の主制御ルーチンを実行すると共に、図4に示す停止指示対応ルーチンを実行する。図3の主制御ルーチンと、図4の停止指示対応ルーチンとは、並列処理により行われる。
【0030】
以下に停止指示対応ルーチンによる制御内容を説明する。即ち、ロボット2〜5が自動動作中にあるとき、例えば調子の悪いロボットを見つけ、そのロボットを停止させる場合、ユーザーは教示装置7の選択スイッチ11aを操作し、停止したいロボットのものと思われるロボット番号を選択する。すると、制御装置6は、図4のステップA1で「YES」と判断して告知動作準備ルーチン(告知動作準備手段)A2に移行する。この告知動作準備ルーチンA2の詳細は図5に示されている。
【0031】
告知動作準備ルーチンA2に移行すると、制御装置6は、選択されたロボット番号から停止対象ロボットを決定すると共に、それ以外の複数台、この実施形態では3台のロボットを告知対象ロボットに定め、選択操作タイミング(図1(a)に示す告知対象ロボットの現在実行中の台形速度パターン上で時点p1)を記憶する(ステップB1)。次に、制御装置6は、告知対象ロボットの現在進行中の移動動作の台形速度パターン(図1(a)のPt)を基に、現在(選択操作タイミング時点p1)からn時間(例えば2秒)先までのサンプリング時間Δt毎の速度指令値を取得する(ステップB2)。なお、図1(a)では、3台の告知対象ロボットのうち、1台のものの台形速度パターンのみを示した(後述の図2(a)も同じ)。
【0032】
続いて、制御装置6は、取得した速度指令値から10%減じた速度でn時間動作(告知動作)したと仮定し、その後、所定の加速度、例えば許容上限加速度+αmaxで加速して等速域の速度V0に達するまでの時間mを算出する(ステップB3)。なお、速度指令値から10%減じた速度に落とすために制動を掛ける場合、その減速度は所定の減速度、例えば−αmaxとし、その制動時間もn時間に入る。
【0033】
制御装置6は、次に告知対象ロボットの現在進行中の移動動作において、p1が減速域またはp1から減速域の開始時点p3までの時間が(n+m)以内であるか否かを判断する(ステップB4)。ステップB4で「NO」と判断した場合、制御装置6は、前記選択操作タイミング時点p1からの告知動作による動作不足量M0を算出する(ステップB5)。ここで、指令速度から10%減じた速度でn時間移動し、その後、+αmaxで加速してV0に達するまで移動すると、当初の台形速度パターンPtによる指令速度のまま移動させた場合に比べて移動距離が不足することとなるが、動作不足量とはこの移動距離の不足量を言う。図1で左下がりの斜線を付した部分の面積が動作不足量M0となる。なお、p1時点が加速域にあるとき、当初台形速度パターンPtでの加速度によっては、+αmaxで加速してV0に達するまでの間に、一部分、当初台形速度パターンPtの外側に出ることがあるが、この外側への張り出し部分は動作の増加分であるので、不足動作量を計算する場合は、この増加分を差し引く必要がある。
【0034】
次に、制御装置6は、現在実行中の移動動作の台形速度パターンPtのうち、p1時点から時間nの期間の速度指令値に対し、上記所定の減速度で減速させて10%減じた速度指令値になるように書き換えると共に、n時間経過時点からm時間の加速度を+αmaxに書き換えた新たな台形速度パターンを作成し(ステップB6)、リターンとなる。
【0035】
前記ステップB4で「YES」、即ちp1時点が減速域またはp1時点から減速域に至るまでの時間が(n+m)以内である場合、制御装置6は、ステップB7に移行して選択操作タイミング時点p1を次の移動動作の加速域開始からq時間経過後に変更し、表示器12に「しばらくお待ち下さい」のメッセージを表示(ステップB8)して前述のステップB2〜B6を実行し、リターンとなる。上記選択操作タイミング時点p1を次の移動動作の加速域開始からq時間経過後とする理由は、加速開始時点から告知動作を開始すると、告知動作と見極めることができないからである。なお、選択操作タイミング時点p1が移動停止時であった場合には、告知動作準備ルーチンはステップB7から開始される。
【0036】
以上により告知動作準備ルーチンA2を終了し、次に復旧動作準備ルーチン(復旧動作準備手段)A3に移行する。復旧準備ルーチンA3は図6に示されている。同ルーチンに入ると、制御装置6は、まず、告知対象ロボットの当初台形速度パターンPtの減速域開始時点p3を遅らせ、これによって生ずる減速域での動作量増加分Ma(図1(a)で右下がりの斜線部分)が前記動作不足量M0と一致するような新台形速度パターンPt´を作成する(ステップC1)。この場合、告知対象ロボットに、現在実行中の移動動作に続く移動動作があれば、図2(a)に示すように、後続の移動動作の台形速度パターンPsについても、当初台形速度パターンPsに対し上記減速域開始時点p3の遅れ分Tdだけ遅らせて新台形速度パターンPs´を作成するものである。
【0037】
次に、制御装置6は、当初台形速度パターンPtの減速域開始時点p3から新台形速度パターンPt´の減速域開始時点p3´の遅れ時間Td、換言すれば、当初台形速度パターンPtの終了時点p4に対する新台形速度パターンPt´の終了時点p4´の遅れ時間Tdを算出する(ステップC2)。
【0038】
続いて、制御装置6は、告知対象ロボット以外のロボット、つまり1台の停止対象ロボットの作業動作の終了時点p6が当初よりTd時間遅れるように停止対象ロボットのp2時点以降の台形速度パターンを書き換える(ステップC3)。p2時点で実行中の移動動作に後続する移動動作がある場合、その後続の移動動作の台形速度パターンも書き換えの対象となる。
【0039】
即ち、図1(b)に示すように、停止対象ロボットに後続する移動動作がない場合、p2時点で停止対象ロボットが実行中の移動動作の台形速度パターンPuについて、減速域の終了点p6を告知対象ロボットの新台形速度パターンPt´の終了点p4´に一致させるようにTdだけ遅らせ、且つ、p2時点から所定の減速度、例えば当初台形速度パターンPuにおける減速域の減速度で減速させて当初速度V1からV2に変更したとき、p2時点から減速域の減速度で減速させて当初速度V1からV2に変更することによって生じた動作不足分(左下がりの斜線を付した部分)M1と、減速域の終了時点をTdだけ遅らせることによって減速域で生じた動作増加分(右下がりの斜線を付した部分)M2とが等しくなるようにV2を定める。
【0040】
以上のようにしてV2を定めた後、p2時点から減速域と同じ減速度で速度V2まで減速する減速線を作成し、そして、当該V2で等速線を引き、減速域の減速線をp4´(p6´)時点で終了するように作成することで、停止対象ロボットの新台形速度パターンPu´を作成する。
また、図2(b)に示すように、停止対象ロボットにも後続する移動動作がある場合、現在(p1時点)実行中の作業動作を含めて残りの作業動作の数がN(2以上の整数)であったとすると、p2時点で実行中の作業動作の台形速度パターンの終了時点、後続の作業動作の終了時点をそれぞれTd/Nだけ遅らせる。そして、現在実行中の作業動作の台形速度パターンPuを、減速線の終了時点p6をTd/Nだけ遅らせ、図1(b)と同様にして動作不足量M1と動作増加量M2とが等しくなるように新台形速度パターンPu´を作成する。後続する作業動作の台形速度パターンについては、加速度および減速度は当初台形速度パターンPvと同じで、加速域の開始点P6がTd/Nだけ遅れたこと、および等速域の速度がV3からV4まで減少したことによる動作不足分(左下がりの斜線を付した部分)M3と、減速域の終了点がZ・Td/N(Zは、後続の作業動作がp2時点で実行中の作業動作を含めてZ番目のものを示す。)だけ遅れることによる増加動作量(右下がりの斜線を付した部分)M4とが等しくなるように新台形速度パターンPv´を作成する。なお、図2(b)は後続する作業動作が1(Nは2)である場合を示している。
【0041】
このようにして新台形速度パターンPt´、Pv´を生成すると、制御装置6は復旧動作準備ルーチンを終了し、リターンとなって図4の停止指示対応ルーチンのステップA4(告知動作制御手段)に移行する。
つまり、制御装置6は、ステップA4において、ステップB6で得た速度パターンにより、p1からn時間、当初台形速度パターンPtの指令速度の10%減の速度となるように、告知対象ロボットのロボットアーム先端の移動速度を制御し(告知動作)、その後、m時間、+αmaxで加速させる。この告知動作制御により、告知対象ロボットの加速度域での加速度が減少、または等速度域での速度が減少する。告知対象ロボットは、この速度減少動作を、教示装置7上で停止させるべきロボットとして選択されたロボットでないことを告知する動作(告知動作)とする。
【0042】
そして、この告知動作をしたロボットを見つけたユーザーは、その告知動作をしたロボット以外の通常通り動作しているロボットが停止させたいと思ったロボットであったとき、停止スイッチ11bを操作する(ステップA5で「YES」)。
制御装置6は、告知動作の開始時点p1からの経過時間をカウントし、この経過時点が所定時間(n+m)以内に停止スイッチ11bが操作されたとき(ステップA5で「YES」、ステップA6で「YES」)、モータ13に逆転トルクを発生させて停止対象ロボットを制動停止させる(ステップA8:停止制御手段)。これにより、停止対象ロボットは移動動作の終了地点に至る前で停止する。
【0043】
告知動作開始時点p1から所定時間(n+m)以内に停止スイッチ11bの操作がなかったとき(ステップA5で「NO」)、制御装置6は、p2時点以降の告知対象ロボットの速度を、前述のステップC1で作成した図1(a)の新台形速度パターンPt´、または図2(a)の新台形速度パターンPt´およびPs´に従って制御する。また、p2時点以降の停止対象ロボットを、前記ステップC3で作成した図1(b)の新台形速度パターンPu´、または図2(b)の新台形速度パターンPu´およびPv´に従って制御する(ステップA7:復旧制御手段)。
この復旧動作によって、停止対象ロボットは速度を遅らせ、これにより動作遅れを生じた告知対象ロボットの作業動作の終了時点と同じ時期に作業動作を終了するようになされる。
【0044】
このように本実施形態によれば、ユーザーが教示装置7によって停止させたいと思う1台のロボットを選択すると、選択されたロボット以外のロボット(告知対象ロボット)の移動速度が減少するので、この速度変動(告知動作)によってユーザーは教示装置7で選択した停止対象ロボット(移動速度を減少させないロボット)が実際にどのロボットであるかを知ることができる。そして、ユーザーが停止させたいと思ったロボットと告知動作を行わないロボットとが一致した場合、停止スイッチ11bを操作することで、その停止させたいと思ったロボットを停止させることができる。
【0045】
また、告知動作を行わないロボットが、ユーザーの停止させたいロボットと異なる場合、ユーザーは停止操作をしない。すると、停止対象ロボットは、告知動作した他のロボットに対し動作の進みを生ずるが、当該停止対象ロボットが復旧動作、つまり、移動速度を減少させて、告知対象ロボットの動作遅れ分と同等の動作遅れを呈し、この結果、4台のロボットが共に同じ時期に作業動作を終了するようになる。
そして、復旧動作により、全てのロボット2〜5が同時期に作業動作を停止するので、告知動作したロボットが作業動作の停止タイミングを常とは異ならせることによって共有領域で他のロボットと衝突するという危険性の発生をなくすことができる。
【0046】
なお、本発明は上記し且つ図面に示す実施形態に限定されるものではなく、次のような拡張或いは変更が可能である。
告知動作を行う移動動作は、選択スイッチ11aを操作した際に実施されている移動動作としたが、告知動作を行う移動動作を例えば横方向への移動動作に予め定めておいても良い。
横方向への移動動作は、水平方向移動に限られず、上下方向の移動を伴っていても良い。
移動動作の速度を表わすパターンとしては、台形に限られず、三角形であっても良い。特に、移動距離が短い場合には、加速域と減速域からなる三角速度パターンの方が好ましい。
【0047】
ロボットは垂直多関節型に限られない。
他のロボットの作業動作の停止時は、停止対象ロボットの作業動作の停止時と必ずしも正確に一致する必要はない。他のロボットが停止対象ロボットと衝突することを防止できる程度に停止の時点が同じ時期であれば、停止時点のばらつきはあっても支障はない。
複数(上記実施例では4台)のロボットの各移動動作の開始時点と終了時点は、それぞれ異なっていても良いが、複数のロボットの各移動動作の開始時点(T1〜T3、T5〜T7)と終了時点(T2〜T4、T6〜T8)は互いに同じ時点であることが新台形速度パターンの形成上好ましい。
【符号の説明】
【0048】
図面中、2〜5はロボット、6は制御装置(告知動作制御手段、停止制御手段、復旧制御手段)、7は教示装置(操作装置)、11aは選択スイッチ(選択手段)、11bは停止スイッチ(停止指示手段)を示す。
【技術分野】
【0001】
本発明は、複数台のロボットのうちから1台のロボットを選択して停止させる場合のロボットの停止方法およびロボットシステムに関する。
【背景技術】
【0002】
製造ラインに沿って複数台のロボットを設置し、これらロボットに組み立て作業などを行わせるシステムがある。このロボットシステムにおいて、例えば、調子の悪いロボットを発見したような場合、そのロボットを停止させて点検修理を行う必要がある。
複数台のロボットが1台の制御装置によって一括制御されている場合、複数台のロボットのうちから或る特定のロボットを停止させるには、制御装置に接続された教示装置により停止させたいロボットを選択して停止操作する。
【0003】
本発明とは直接の関係はないが、特許文献1には、ロボットアームに表示器を取り付け、教示装置によってロボットアームを動かす際に、表示器によって移動方向を表示し、これによってロボットアームの動作方向を事前に確認できるようにすることが記載されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−878号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
教示装置で特定のロボットを選択するには、そのロボットが制御装置上で何番のロボットであるかを知らないと、間違えて他のロボットを停止させてしまう恐れがある。しかし、何番のロボットかをユーザーの記憶に頼ることは間違いの原因になり、好ましくない。かといって、動作中のロボットに近寄って何番かをユーザー自身で確認することは、ロボットと衝突の恐れがあって危険である。
【0006】
特許文献1に開示された技術を応用してロボットに表示器を設け、教示装置によって1台のロボットを選択すると、その選択されたロボットの表示器が選択されたことを表示するように構成することが考えられる。しかし、ロボットの姿勢や設備環境によっては制御装置が置かれた位置からロボットの表示器が見えない場合があり、事前確認手段としては好ましいものではない。
【0007】
本発明は上記の事情に鑑みてなされたもので、その目的は、選択したロボットが実際にどのロボットであるかを、ロボットの姿勢や設備環境のいかんにかかわらず識別できるロボットの停止方法およびロボットシステムを提供することにある。
【課題を解決するための手段】
【0008】
本発明によれば、ユーザーが操作装置の選択手段により1台のロボットを選択すると、選択されたロボット以外の他のロボットの移動速度が低下、例えば加速途中にあるロボットの加速度が減少し、或いは等速移動していたロボットの移動速度が減少する。従って、ユーザーが操作装置上で選択した停止対象ロボットを見つけるには、移動速度が減少することなく通常通り動作するロボットを見つければ良い。
【0009】
そして、ユーザーが停止させたいと思ったロボットが通常通り動作するロボット(停止対象ロボット)と一致した場合、ユーザーはそのロボットを停止する操作を行う。通常通り動作するロボットが、ユーザーが停止させたいと思ったロボットでなかった場合、ユーザーは停止操作をしない。停止操作がされない場合には、その後、停止対象ロボットが減速し、先に減速した他のロボットと同じ時期に作業動作を終了することとなる。これにより、複数のロボットの全てが同時期にロボット作業を終了するようになり、次のロボット作業において全てのロボットが同時期に動作を開始できるように復旧する。
【図面の簡単な説明】
【0010】
【図1】本発明の一実施形態における告知動作と復旧動作の一例を示すもので、(a)は告知対象ロボットの速度パターン図、(b)は停止対象ロボットの速度パターン図
【図2】告知動作と復旧動作の他の例を示すもので、(a)は告知対象ロボットの速度パターン図、(b)は停止対象ロボットの速度パターン図
【図3】主制御の内容を示すフローチャート
【図4】停止指示対応ルーチンの内容を示すフローチャート
【図5】告知動作準備ルーチンの内容を示すフローチャート
【図6】復旧動作準備ルーチンの内容を示すフローチャート
【図7】一般的な台形速度パターン図
【図8】作業サイクルの内容を示す速度パターン図
【図9】制御装置の電気的構成を示すブロック図
【図10】2台のロボットの共有範囲を示す模式図
【図11】ロボットシステムを示す概略図
【図12】ロボットシステムの電気的接続関係を示すブロック図
【発明を実施するための形態】
【0011】
以下、本発明の一実施形態を図面により説明する。本実施形態におけるロボットシステムは、図11および図12に示すように、製品を搬送するコンベア(製造ライン)1の両側に設置された複数台、この実施形態では4台のロボット2〜5と、これらロボット2〜5を一括して制御する制御装置6と、制御装置6に接続された操作装置としての教示装置7とから構成されている。なお、各ロボット2〜5を区別する場合には、第1〜第4の順番号を付して説明する。
【0012】
ロボット2〜5は、いずれも6軸の垂直多関節型ロボットとして構成されている。これらロボット2〜5は、ロボットアーム先端に、ワークを把持するハンドなどのエンドエフェクタ(図示せず)が取り付けられている。そして、各ロボット2〜5は、コンベア1が1ピッチ間欠的に送られる都度、自動供給装置8から定位置に供給される部品を把持してコンベア1上に搬送し、製品に組み付けるという作業を行う。
【0013】
教示装置7は主としてロボット2〜5を手動で操作する際に使用する。この教示装置7には、各種スイッチ11、表示器(表示手段)12が設けられている。上記スイッチ11には、教示モード、自動動作モードなどのモード選択を行うためのモード選択スイッチ、4台のロボット2〜5のうちから所望する1台のロボットを選択するためのロボット選択スイッチ(選択手段)、教示モード時にロボットアームを動かすための動作指示スイッチ、自動動作モードのとき選択したロボットを停止させるための停止スイッチ(停止指示手段)などが含まれている。そのうち、図12には、ロボット選択スイッチを符号11aで、停止スイッチを符号11bで示した。
【0014】
次に、制御装置6の構成を示す図9において、各ロボット2〜5は、アームを駆動するための6台のモータ13を有し、各モータ13には、当該モータ13の回転位置を検出して制御装置6に出力するロータリーエンコーダ14が連結されている。なお、図9では、制御装置6と1台のロボットとの関係を示し、また、1台のロボットにおいてもモータ13は1台のみ示した。
【0015】
制御装置6は、CPU15、記憶手段としてのROM16およびRAM17を備える他、モータ13の駆動回路18およびロータリーエンコーダ14からの回転位置検出信号によりロボットの各アームの回転位置を検出する位置検出回路19を備えている。ROM16には、ロボット2〜5を教示装置7により作成された動作プログラムに従って自動動作させるための制御プログラム、自動動作中のロボット2〜5を教示装置7からの指示によって停止させる際の制御プログラム、ロボット2〜5の速度制御や位置制御の際に用いられる各種のデータなどが記憶されている。また、RAM17には、教示装置7により作成された動作プログラムなどが記憶される。
【0016】
CPU15は、RAM17に記憶された動作プログラムから移動軌跡を演算し、ロボットアーム先端がこの軌跡に沿って移動するように当該ロボットアーム先端の位置と速度を制御する。
具体的には、GPU15は、ロボットアーム先端の移動速度を速度パターン、例えば台形速度パターンに当て嵌めて決定する。この場合、台形速度パターンは、図7に示すように、加速域、等速域、減速域からなるが、加速域における加速度+α、等速域における速度V、減速域における減速度−αは動作プログラムに記録されたパラメータから決定される。
【0017】
そして、CPU15は、移動開始時点Sから移動終了時点Eまでの間、台形速度パターンから所定のサンプリング周期(時間)Δt経過毎の速度を算出すると共に、移動開始時点Sからの移動距離を算出する。なお、移動距離は速度の積分値(サンプリング時間Δt毎の速度とΔt時間の積の総和)として求めることができる。
【0018】
CPU15は、サンプリング時間Δt経過毎に、移動開始時点Sからの移動距離だけ移動したときの位置(座標)を移動軌跡から算出し、求めたサンプリング時間Δt経過毎のロボットアーム先端の位置(指令位置)と速度(指令速度)から、各アームの位置と速度を演算し、これを各アームのサンプリング時間Δt経過毎の目標位置および目標速度とする。そして、CPU15は、位置検出回路19から取得した各アームの現在の位置および速度が、目標位置および目標速度となるように駆動回路18を介してモータ13を制御する。以上により、ロボットアーム先端が、動作プログラムにより定められた軌跡上を、台形速度パターンに従った速度で移動するように制御される。
【0019】
ここで、台形速度パターンにおいて、加速度+α、減速度−α、等速域での速度Vはロボットアームが強度上耐え得る最大加速度、最大減速度、最高速度に一定の安全率を見込んだ許容上限加速度+αmax、許容下限減速度−αmax、許容上限速度Vmax以下に定められる。なお、モータ13はロボットアームの駆動源であるが、同時に逆転トルク制動(逆転トルクを発生して制動)によってロボットアームを制動する制動手段としても機能する。
【0020】
図8は、ロボット2〜5の自動動作時におけるロボットアーム先端の速度パターンの一例を示している。図8において、T1〜T2は上昇動作時、T2からT3は横方向移動動作時、T3〜T4は下降動作時、T4〜T5は移動動作停止時、T5〜T6は上昇動作時、T6〜T7は横方向移動動作時、T7〜T8は下降動作時、T8〜T9=T1は移動動作停止時を示している。
【0021】
この図8では、T1からT5までが第1の作業動作、T5からT9までが第2の作業動作で、この2つの作業動作を1作業サイクルとしている。そして、自動動作時には、この作業サイクルを繰り返し実行する。
【0022】
この図8の1作業サイクルを各ロボット2〜4に当てはめてみる。まず、第1のロボット2および第4のロボット5は、自動供給装置8から供給されるワークを把持してT1〜T2で上昇し、T2〜T3でワークを自動供給装置8からコンベア1上に搬送し、T3〜T4でコンベアの製品までワークを下降させ、T4〜T5の移動動作停止時でワークの把持を解除する(第1の作業動作)。その後、T5〜T6でコンベア1から上方に離れ、T6〜T7でコンベア1上から自動供給装置8上まで移動し、T7〜T8で自動供給装置8により定位置に供給されたワークまで下降し、T8〜T9の移動動作停止時でワークを把持する(第2の作業動作)。
【0023】
これに対し、第2のロボット3および第3のロボット4は、T1〜T2でコンベア1から上方に離れ、T2〜T3でコンベア1上から自動供給装置8上まで移動し、T3〜T4で自動供給装置8により定位置に供給されたワークまで下降し、T4〜T5の移動動作停止時でワークを把持する(第1の作業動作)。その後、T5〜T6でワークを把持したまま上昇し、T6〜T7でワークを自動供給装置8からコンベア1上に搬送し、T7〜T8でコンベアの製品までワークを下降させ、T8〜T9の移動動作停止時でワークの把持を解除する(第2の作業動作)。
【0024】
従って、第1のロボット2と第2のロボット3、第3のロボット4と第4のロボット5とは、通常は、コンベア1に対し、一方が近付くときは、他方が遠ざかるという動作関係を保持するように制御装置6よって制御されるので、衝突の恐れはない。しかし、第1のロボット2と第2のロボット3、第3のロボット4と第4のロボット5とは、図10に示すようにコンベア1上で動作範囲(楕円で示す)を共有する領域(共有領域)Uがあるので、動作のタイミングがずれると、共有領域Uで衝突する可能性が生ずる。
【0025】
ところで、ロボット2〜5の自動動作中、例えばユーザーが異常だと感じたロボットがあった場合、異常の程度によっては、そのロボットを停止させて、点検を行うことが必要になってくる。この場合、ロボットの停止操作は教示装置7によって行う。例えば、第1のロボット2を停止させる場合、選択スイッチ11aを操作して第1のロボット2に割り当てられている番号を選択し、停止スイッチ11aを操作する。
【0026】
しかし、第1のロボット2が教示装置7上でも第1番のロボットであるかは確かではない。例えば、図11において、第1のロボット2の位置に設置されたロボットが第1番、第2のロボット3の位置に設置されたロボットが第2番に定められるとした場合、実際に工場に据え付ける際に、何らかの理由で、互いに逆の位置に設置(第1のロボット2の位置に第2のロボット3が設置、第2のロボット3の位置に第1のロボット2が設置)されることもある。この場合、第1のロボット2を停止させたいとして、第1番のロボットを選択して停止操作を行うと、第2のロボット3が停止してしまうという不具合を生ずる。
【0027】
このような不具合の発生を防止し、停止させるべきロボットを間違いなく停止させることができるようにするために、本発明では、教示装置7上で停止させるものとして選択されたロボット(操作装置上での停止対象ロボット)を除く他の複数台のロボット(告知対象ロボット)に、停止対象ロボットでないことを告知する告知動作を行わせ、ユーザーが停止させたいと思ったロボットと、告知動作せず通常通り動作する1台のロボットとが一致した場合、停止操作を行うようにしている。
【0028】
次に、ロボット2〜5の自動動作中に、1台のロボットを停止させる場合の制御装置6の制御内容を図3〜図6のフローチャートをも参照しながら説明する。自動動作モードにおいて、各ロボット2〜5は、複数の移動動作を含む複数の作業動作からなる作業サイクル、つまり図8に示された上昇・横方向移動・下降の移動動作を含む第1の作業動作と第2の作業動作からなる作業サイクルを繰り返し実行している。
【0029】
この自動動作時において、制御装置6は、各ロボット2〜5のロボットアーム先端の位置と速度を、前述のように指令位置と指令速度によって制御する図3の主制御ルーチンを実行すると共に、図4に示す停止指示対応ルーチンを実行する。図3の主制御ルーチンと、図4の停止指示対応ルーチンとは、並列処理により行われる。
【0030】
以下に停止指示対応ルーチンによる制御内容を説明する。即ち、ロボット2〜5が自動動作中にあるとき、例えば調子の悪いロボットを見つけ、そのロボットを停止させる場合、ユーザーは教示装置7の選択スイッチ11aを操作し、停止したいロボットのものと思われるロボット番号を選択する。すると、制御装置6は、図4のステップA1で「YES」と判断して告知動作準備ルーチン(告知動作準備手段)A2に移行する。この告知動作準備ルーチンA2の詳細は図5に示されている。
【0031】
告知動作準備ルーチンA2に移行すると、制御装置6は、選択されたロボット番号から停止対象ロボットを決定すると共に、それ以外の複数台、この実施形態では3台のロボットを告知対象ロボットに定め、選択操作タイミング(図1(a)に示す告知対象ロボットの現在実行中の台形速度パターン上で時点p1)を記憶する(ステップB1)。次に、制御装置6は、告知対象ロボットの現在進行中の移動動作の台形速度パターン(図1(a)のPt)を基に、現在(選択操作タイミング時点p1)からn時間(例えば2秒)先までのサンプリング時間Δt毎の速度指令値を取得する(ステップB2)。なお、図1(a)では、3台の告知対象ロボットのうち、1台のものの台形速度パターンのみを示した(後述の図2(a)も同じ)。
【0032】
続いて、制御装置6は、取得した速度指令値から10%減じた速度でn時間動作(告知動作)したと仮定し、その後、所定の加速度、例えば許容上限加速度+αmaxで加速して等速域の速度V0に達するまでの時間mを算出する(ステップB3)。なお、速度指令値から10%減じた速度に落とすために制動を掛ける場合、その減速度は所定の減速度、例えば−αmaxとし、その制動時間もn時間に入る。
【0033】
制御装置6は、次に告知対象ロボットの現在進行中の移動動作において、p1が減速域またはp1から減速域の開始時点p3までの時間が(n+m)以内であるか否かを判断する(ステップB4)。ステップB4で「NO」と判断した場合、制御装置6は、前記選択操作タイミング時点p1からの告知動作による動作不足量M0を算出する(ステップB5)。ここで、指令速度から10%減じた速度でn時間移動し、その後、+αmaxで加速してV0に達するまで移動すると、当初の台形速度パターンPtによる指令速度のまま移動させた場合に比べて移動距離が不足することとなるが、動作不足量とはこの移動距離の不足量を言う。図1で左下がりの斜線を付した部分の面積が動作不足量M0となる。なお、p1時点が加速域にあるとき、当初台形速度パターンPtでの加速度によっては、+αmaxで加速してV0に達するまでの間に、一部分、当初台形速度パターンPtの外側に出ることがあるが、この外側への張り出し部分は動作の増加分であるので、不足動作量を計算する場合は、この増加分を差し引く必要がある。
【0034】
次に、制御装置6は、現在実行中の移動動作の台形速度パターンPtのうち、p1時点から時間nの期間の速度指令値に対し、上記所定の減速度で減速させて10%減じた速度指令値になるように書き換えると共に、n時間経過時点からm時間の加速度を+αmaxに書き換えた新たな台形速度パターンを作成し(ステップB6)、リターンとなる。
【0035】
前記ステップB4で「YES」、即ちp1時点が減速域またはp1時点から減速域に至るまでの時間が(n+m)以内である場合、制御装置6は、ステップB7に移行して選択操作タイミング時点p1を次の移動動作の加速域開始からq時間経過後に変更し、表示器12に「しばらくお待ち下さい」のメッセージを表示(ステップB8)して前述のステップB2〜B6を実行し、リターンとなる。上記選択操作タイミング時点p1を次の移動動作の加速域開始からq時間経過後とする理由は、加速開始時点から告知動作を開始すると、告知動作と見極めることができないからである。なお、選択操作タイミング時点p1が移動停止時であった場合には、告知動作準備ルーチンはステップB7から開始される。
【0036】
以上により告知動作準備ルーチンA2を終了し、次に復旧動作準備ルーチン(復旧動作準備手段)A3に移行する。復旧準備ルーチンA3は図6に示されている。同ルーチンに入ると、制御装置6は、まず、告知対象ロボットの当初台形速度パターンPtの減速域開始時点p3を遅らせ、これによって生ずる減速域での動作量増加分Ma(図1(a)で右下がりの斜線部分)が前記動作不足量M0と一致するような新台形速度パターンPt´を作成する(ステップC1)。この場合、告知対象ロボットに、現在実行中の移動動作に続く移動動作があれば、図2(a)に示すように、後続の移動動作の台形速度パターンPsについても、当初台形速度パターンPsに対し上記減速域開始時点p3の遅れ分Tdだけ遅らせて新台形速度パターンPs´を作成するものである。
【0037】
次に、制御装置6は、当初台形速度パターンPtの減速域開始時点p3から新台形速度パターンPt´の減速域開始時点p3´の遅れ時間Td、換言すれば、当初台形速度パターンPtの終了時点p4に対する新台形速度パターンPt´の終了時点p4´の遅れ時間Tdを算出する(ステップC2)。
【0038】
続いて、制御装置6は、告知対象ロボット以外のロボット、つまり1台の停止対象ロボットの作業動作の終了時点p6が当初よりTd時間遅れるように停止対象ロボットのp2時点以降の台形速度パターンを書き換える(ステップC3)。p2時点で実行中の移動動作に後続する移動動作がある場合、その後続の移動動作の台形速度パターンも書き換えの対象となる。
【0039】
即ち、図1(b)に示すように、停止対象ロボットに後続する移動動作がない場合、p2時点で停止対象ロボットが実行中の移動動作の台形速度パターンPuについて、減速域の終了点p6を告知対象ロボットの新台形速度パターンPt´の終了点p4´に一致させるようにTdだけ遅らせ、且つ、p2時点から所定の減速度、例えば当初台形速度パターンPuにおける減速域の減速度で減速させて当初速度V1からV2に変更したとき、p2時点から減速域の減速度で減速させて当初速度V1からV2に変更することによって生じた動作不足分(左下がりの斜線を付した部分)M1と、減速域の終了時点をTdだけ遅らせることによって減速域で生じた動作増加分(右下がりの斜線を付した部分)M2とが等しくなるようにV2を定める。
【0040】
以上のようにしてV2を定めた後、p2時点から減速域と同じ減速度で速度V2まで減速する減速線を作成し、そして、当該V2で等速線を引き、減速域の減速線をp4´(p6´)時点で終了するように作成することで、停止対象ロボットの新台形速度パターンPu´を作成する。
また、図2(b)に示すように、停止対象ロボットにも後続する移動動作がある場合、現在(p1時点)実行中の作業動作を含めて残りの作業動作の数がN(2以上の整数)であったとすると、p2時点で実行中の作業動作の台形速度パターンの終了時点、後続の作業動作の終了時点をそれぞれTd/Nだけ遅らせる。そして、現在実行中の作業動作の台形速度パターンPuを、減速線の終了時点p6をTd/Nだけ遅らせ、図1(b)と同様にして動作不足量M1と動作増加量M2とが等しくなるように新台形速度パターンPu´を作成する。後続する作業動作の台形速度パターンについては、加速度および減速度は当初台形速度パターンPvと同じで、加速域の開始点P6がTd/Nだけ遅れたこと、および等速域の速度がV3からV4まで減少したことによる動作不足分(左下がりの斜線を付した部分)M3と、減速域の終了点がZ・Td/N(Zは、後続の作業動作がp2時点で実行中の作業動作を含めてZ番目のものを示す。)だけ遅れることによる増加動作量(右下がりの斜線を付した部分)M4とが等しくなるように新台形速度パターンPv´を作成する。なお、図2(b)は後続する作業動作が1(Nは2)である場合を示している。
【0041】
このようにして新台形速度パターンPt´、Pv´を生成すると、制御装置6は復旧動作準備ルーチンを終了し、リターンとなって図4の停止指示対応ルーチンのステップA4(告知動作制御手段)に移行する。
つまり、制御装置6は、ステップA4において、ステップB6で得た速度パターンにより、p1からn時間、当初台形速度パターンPtの指令速度の10%減の速度となるように、告知対象ロボットのロボットアーム先端の移動速度を制御し(告知動作)、その後、m時間、+αmaxで加速させる。この告知動作制御により、告知対象ロボットの加速度域での加速度が減少、または等速度域での速度が減少する。告知対象ロボットは、この速度減少動作を、教示装置7上で停止させるべきロボットとして選択されたロボットでないことを告知する動作(告知動作)とする。
【0042】
そして、この告知動作をしたロボットを見つけたユーザーは、その告知動作をしたロボット以外の通常通り動作しているロボットが停止させたいと思ったロボットであったとき、停止スイッチ11bを操作する(ステップA5で「YES」)。
制御装置6は、告知動作の開始時点p1からの経過時間をカウントし、この経過時点が所定時間(n+m)以内に停止スイッチ11bが操作されたとき(ステップA5で「YES」、ステップA6で「YES」)、モータ13に逆転トルクを発生させて停止対象ロボットを制動停止させる(ステップA8:停止制御手段)。これにより、停止対象ロボットは移動動作の終了地点に至る前で停止する。
【0043】
告知動作開始時点p1から所定時間(n+m)以内に停止スイッチ11bの操作がなかったとき(ステップA5で「NO」)、制御装置6は、p2時点以降の告知対象ロボットの速度を、前述のステップC1で作成した図1(a)の新台形速度パターンPt´、または図2(a)の新台形速度パターンPt´およびPs´に従って制御する。また、p2時点以降の停止対象ロボットを、前記ステップC3で作成した図1(b)の新台形速度パターンPu´、または図2(b)の新台形速度パターンPu´およびPv´に従って制御する(ステップA7:復旧制御手段)。
この復旧動作によって、停止対象ロボットは速度を遅らせ、これにより動作遅れを生じた告知対象ロボットの作業動作の終了時点と同じ時期に作業動作を終了するようになされる。
【0044】
このように本実施形態によれば、ユーザーが教示装置7によって停止させたいと思う1台のロボットを選択すると、選択されたロボット以外のロボット(告知対象ロボット)の移動速度が減少するので、この速度変動(告知動作)によってユーザーは教示装置7で選択した停止対象ロボット(移動速度を減少させないロボット)が実際にどのロボットであるかを知ることができる。そして、ユーザーが停止させたいと思ったロボットと告知動作を行わないロボットとが一致した場合、停止スイッチ11bを操作することで、その停止させたいと思ったロボットを停止させることができる。
【0045】
また、告知動作を行わないロボットが、ユーザーの停止させたいロボットと異なる場合、ユーザーは停止操作をしない。すると、停止対象ロボットは、告知動作した他のロボットに対し動作の進みを生ずるが、当該停止対象ロボットが復旧動作、つまり、移動速度を減少させて、告知対象ロボットの動作遅れ分と同等の動作遅れを呈し、この結果、4台のロボットが共に同じ時期に作業動作を終了するようになる。
そして、復旧動作により、全てのロボット2〜5が同時期に作業動作を停止するので、告知動作したロボットが作業動作の停止タイミングを常とは異ならせることによって共有領域で他のロボットと衝突するという危険性の発生をなくすことができる。
【0046】
なお、本発明は上記し且つ図面に示す実施形態に限定されるものではなく、次のような拡張或いは変更が可能である。
告知動作を行う移動動作は、選択スイッチ11aを操作した際に実施されている移動動作としたが、告知動作を行う移動動作を例えば横方向への移動動作に予め定めておいても良い。
横方向への移動動作は、水平方向移動に限られず、上下方向の移動を伴っていても良い。
移動動作の速度を表わすパターンとしては、台形に限られず、三角形であっても良い。特に、移動距離が短い場合には、加速域と減速域からなる三角速度パターンの方が好ましい。
【0047】
ロボットは垂直多関節型に限られない。
他のロボットの作業動作の停止時は、停止対象ロボットの作業動作の停止時と必ずしも正確に一致する必要はない。他のロボットが停止対象ロボットと衝突することを防止できる程度に停止の時点が同じ時期であれば、停止時点のばらつきはあっても支障はない。
複数(上記実施例では4台)のロボットの各移動動作の開始時点と終了時点は、それぞれ異なっていても良いが、複数のロボットの各移動動作の開始時点(T1〜T3、T5〜T7)と終了時点(T2〜T4、T6〜T8)は互いに同じ時点であることが新台形速度パターンの形成上好ましい。
【符号の説明】
【0048】
図面中、2〜5はロボット、6は制御装置(告知動作制御手段、停止制御手段、復旧制御手段)、7は教示装置(操作装置)、11aは選択スイッチ(選択手段)、11bは停止スイッチ(停止指示手段)を示す。
【特許請求の範囲】
【請求項1】
複数の移動動作を含む複数の作業動作からなる作業サイクルを繰り返し実行する複数台のロボットと、
常には、前記各ロボットの前記各作業動作における前記各移動動作の開始点から終了点までの移動速度を、加速域から等速域を経て減速域に至る台形速度パターン、または加速域と減速域とからなる三角速度パターンに従って制御することにより、前記複数台のロボットの現在実行中の作業動作が全て同じ時期に終了するように制御する1台の制御手段と、
前記制御装置に接続され前記複数台の各ロボットに対して手動による動作指示を行うための1台の操作装置と
を備えたロボットシステムにおいて、
前記操作装置に、前記複数台のロボットのうちから所望のロボットを選択するための選択手段と、この選択手段により選択されたロボットを停止させるための停止指示手段と
を設け、
前記制御装置は、
前記複数台のロボットのうち1台のロボットが前記選択手段により前記操作装置上での停止対象ロボットとして選択されると、前記複数台のロボットのうち前記停止対象ロボットを除く他のロボットが現在実行中の前記移動動作または予め定められた移動動作の前記加速域における加速度または前記等速域における速度を減少側に変化させてこの速度変化を前記停止対象ロボット以外のロボットとしての告知動作となし、この告知動作後所定時間内に前記停止指示手段が操作された場合には、前記停止対象ロボットを停止させ、前記告知動作後所定時間内に前記停止手段が操作されなかった場合には、前記停止対象ロボットの移動速度を減じて前記複数台のロボットの現在実行中の前記ロボット作業の終了時期が同じとなるようにした
ことを特徴とするロボットの停止方法。
【請求項2】
複数の移動動作を含む複数の作業動作からなる作業サイクルを繰り返し実行する複数台のロボットと、
常には、前記各ロボットの前記各作業動作における前記各移動動作の開始点から終了点までの移動速度を、加速域から等速域を経て減速域に至る台形速度パターン、または加速域と減速域とからなる三角速度パターンに従って制御することにより、前記複数台のロボットの現在実行中の作業動作が全て同じ時期に終了するように制御する1台の制御手段と、
前記制御装置に接続され前記複数台の各ロボットに対して手動による動作指示を行うための1台の操作装置と
を備えたロボットシステムにおいて、
前記操作装置に、前記複数台のロボットのうちから所望のロボットを選択するための選択手段と、この選択手段により選択されたロボットを停止させるための停止指示手段と
を設け、
前記制御装置に、
前記複数台のロボットのうち1台のロボットが前記選択手段により前記操作装置上での停止対象ロボットとして選択されると、前記複数台のロボットのうち前記停止対象ロボットを除く他のロボットが現在実行中の前記移動動作または予め定められた移動動作の前記加速域における加速度または前記等速域における速度を減少側に変化させてこの速度変化を前記停止対象ロボット以外のロボットとしての告知動作となす告知動作制御手段と、
前記告知動作後所定時間内に前記停止指示手段が操作されたとき、前記停止対象ロボットを停止させる停止制御手段と、
前記告知動作後所定時間内に前記停止手段が操作されなかったとき、前記停止対象ロボットの移動速度を減じて前記複数台のロボットの現在実行中の前記ロボット作業の終了時期が同じとなるよう復旧させる復旧制御手段と
を設けたことを特徴とするロボットシステム。
【請求項1】
複数の移動動作を含む複数の作業動作からなる作業サイクルを繰り返し実行する複数台のロボットと、
常には、前記各ロボットの前記各作業動作における前記各移動動作の開始点から終了点までの移動速度を、加速域から等速域を経て減速域に至る台形速度パターン、または加速域と減速域とからなる三角速度パターンに従って制御することにより、前記複数台のロボットの現在実行中の作業動作が全て同じ時期に終了するように制御する1台の制御手段と、
前記制御装置に接続され前記複数台の各ロボットに対して手動による動作指示を行うための1台の操作装置と
を備えたロボットシステムにおいて、
前記操作装置に、前記複数台のロボットのうちから所望のロボットを選択するための選択手段と、この選択手段により選択されたロボットを停止させるための停止指示手段と
を設け、
前記制御装置は、
前記複数台のロボットのうち1台のロボットが前記選択手段により前記操作装置上での停止対象ロボットとして選択されると、前記複数台のロボットのうち前記停止対象ロボットを除く他のロボットが現在実行中の前記移動動作または予め定められた移動動作の前記加速域における加速度または前記等速域における速度を減少側に変化させてこの速度変化を前記停止対象ロボット以外のロボットとしての告知動作となし、この告知動作後所定時間内に前記停止指示手段が操作された場合には、前記停止対象ロボットを停止させ、前記告知動作後所定時間内に前記停止手段が操作されなかった場合には、前記停止対象ロボットの移動速度を減じて前記複数台のロボットの現在実行中の前記ロボット作業の終了時期が同じとなるようにした
ことを特徴とするロボットの停止方法。
【請求項2】
複数の移動動作を含む複数の作業動作からなる作業サイクルを繰り返し実行する複数台のロボットと、
常には、前記各ロボットの前記各作業動作における前記各移動動作の開始点から終了点までの移動速度を、加速域から等速域を経て減速域に至る台形速度パターン、または加速域と減速域とからなる三角速度パターンに従って制御することにより、前記複数台のロボットの現在実行中の作業動作が全て同じ時期に終了するように制御する1台の制御手段と、
前記制御装置に接続され前記複数台の各ロボットに対して手動による動作指示を行うための1台の操作装置と
を備えたロボットシステムにおいて、
前記操作装置に、前記複数台のロボットのうちから所望のロボットを選択するための選択手段と、この選択手段により選択されたロボットを停止させるための停止指示手段と
を設け、
前記制御装置に、
前記複数台のロボットのうち1台のロボットが前記選択手段により前記操作装置上での停止対象ロボットとして選択されると、前記複数台のロボットのうち前記停止対象ロボットを除く他のロボットが現在実行中の前記移動動作または予め定められた移動動作の前記加速域における加速度または前記等速域における速度を減少側に変化させてこの速度変化を前記停止対象ロボット以外のロボットとしての告知動作となす告知動作制御手段と、
前記告知動作後所定時間内に前記停止指示手段が操作されたとき、前記停止対象ロボットを停止させる停止制御手段と、
前記告知動作後所定時間内に前記停止手段が操作されなかったとき、前記停止対象ロボットの移動速度を減じて前記複数台のロボットの現在実行中の前記ロボット作業の終了時期が同じとなるよう復旧させる復旧制御手段と
を設けたことを特徴とするロボットシステム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2013−71236(P2013−71236A)
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願番号】特願2011−214513(P2011−214513)
【出願日】平成23年9月29日(2011.9.29)
【出願人】(501428545)株式会社デンソーウェーブ (1,155)
【Fターム(参考)】
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願日】平成23年9月29日(2011.9.29)
【出願人】(501428545)株式会社デンソーウェーブ (1,155)
【Fターム(参考)】
[ Back to top ]