
ロボットの好感度形成装置及びその方法
【課題】本発明は、ロボットとヒトとの情緒的インタラクションを通じて、互に好感度を形成する装置及びその方法を提供する。
【解決手段】本発明は、ユーザーの入力した特徴値の入力を受けてロボットとユーザーとの個人的な親密度を計算し、ロボットrとユーザーiとが他のユーザーとの関係の中で形成する緊張度を計算して、ユーザーに対するロボットの好感度を計算する好感度生成部と、前記好感度生成部を通じて生成されたロボットの好感度によってロボットの感情強度を調節し、ロボットの行動の前・後に好感度を表現する行動を付け加えて表現する好感度表現部と、前記好感度表現部を通じて計算されたユーザーに対するロボットの好感度表現程度と、ユーザーの感情的反応の入力を受けて、2つの情報の差異に基づいて利益を計算し、これを利用してユーザーの入力特徴値を更新する好感度学習部とを包含する。
【解決手段】本発明は、ユーザーの入力した特徴値の入力を受けてロボットとユーザーとの個人的な親密度を計算し、ロボットrとユーザーiとが他のユーザーとの関係の中で形成する緊張度を計算して、ユーザーに対するロボットの好感度を計算する好感度生成部と、前記好感度生成部を通じて生成されたロボットの好感度によってロボットの感情強度を調節し、ロボットの行動の前・後に好感度を表現する行動を付け加えて表現する好感度表現部と、前記好感度表現部を通じて計算されたユーザーに対するロボットの好感度表現程度と、ユーザーの感情的反応の入力を受けて、2つの情報の差異に基づいて利益を計算し、これを利用してユーザーの入力特徴値を更新する好感度学習部とを包含する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ロボットがユーザーに対して得る好感度を評価して表現し、ロボットがユーザーの反応を通じて好感度を学習する装置及びその方法に関する。より詳細には、ユーザーの制御権、所属感に対する情報などの入力を受けてユーザーに対する親密度を計算し、他のユーザーとの関係を通じて好感度を最終的に評価して適切な行動と感情の表現を通じて好感度を表現し、これに対するユーザーの反応をタッチや音声で入力を受け好感度を学習する装置及びその方法に関する。
【背景技術】
【0002】
近年、愛玩ロボット、掃除ロボット、教育用ロボットなどがヒトの日常生活の領域で活発に使用されながら、ユーザーがロボットと情緒的に親密感を感じることができるようにする研究が重要視されている。殊に、ユーザーがロボットから感じ取る親密感(感情状態)を認識し、ヒトと類似する適切な感情表現を通じてロボットの信頼度を高める研究がHRI(ヒト・ロボットインタラクション)分野で活発に進行されている。
【0003】
これと関連して、ロボットもやはりユーザーに対する好感度を生成して積極的に表現することによって、ロボットが能動的にヒトとの関係を形成していく研究が重要になってきた。しかし、ロボットが自分の好感度をユーザーに対して効果的に表現する方法と、ユーザーの持続的な反応によって好感度を適切に学習していく方法に対する研究は今のところ世界的な視野においても未開発の状態である。
【発明の開示】
【発明が解決しようとする課題】
【0004】
本発明は、前記のような実情に基づいて案出されたものであって、ロボットとユーザー個人との親密度を計算し、ロボットと多数ユーザーとの情緒関係の緊張度を計算してロボットの好感度を生成し、ユーザーの反応によってユーザーとの親密度を更新するとともに、ユーザーの持続的な反応に従って好感度を適切に学習していくためのロボットの好感度形成装置及びその方法を提供する。
【課題を解決するための手段】
【0005】
前記のような技術的課題を解決するために、本発明は、ロボットの好感度を形成する装置及びその方法に関し、ユーザーの入力特徴値の入力を受けて、ロボットとユーザーとの個人的な親密度mriを計算し、ロボットrとユーザーiとが他のユーザーとの関係の中で形成する緊張度Briを計算して、ユーザーに対するロボットの好感度を計算する好感度生成部と、前記好感度生成部を通じて生成されたロボットの好感度によってロボットの感情強度を調節し、ロボットの行動の前・後に好感度を表現する行動を付け加えて表現する好感度表現部と、前記好感度表現部を通じて計算されたユーザーに対するロボットの好感度表現の程度と、ユーザーの感情的反応の入力を受けて、2つの情報の差異に基づいて利益(profit)を計算し、これを利用してユーザーの入力特徴値を更新する好感度学習部とを包含してなる。
【発明の効果】
【0006】
本発明によれば、ロボットとユーザーとの持続的なサービスに基づいたインタラクションを通じて、ロボットがユーザーに対して好感度を形成することにより、他のユーザーとは異なる差別化されたサービスを提供することができる。
【0007】
例えば、居住空間の中に多数のユーザーが一緒にいるとき、ロボットは自分に有る好感度の高いユーザーに近寄って視線を合わせたり、感情の強度を極大化させて表現することができ、好感度の低いユーザーの呼出しの時には、これを回避するか、ためらうか、または、気色を窺ったりするなどの常套行動を通じてインタラクションを回避する意思を表して、相対的に好感度の高いユーザーには良く追従するロボットとして認識させることができる。
【0008】
また、本発明によれば、ロボットの機能をサービス領域だけでなく、家庭用エンタテインメントロボット、教育用ロボットなどの領域でも積極的に活用することができる。
【発明を実施するための最良の形態】
【0009】
本発明の具体的な特徴及びメリットなどを添付図面に基づいて詳細に説明する。なお、本発明に係る公知機能及びその構成に対する具体的な説明が本発明の要旨を混同すると判断される場合には、その詳細な説明を省略する。
【0010】
以下、添付の図1〜図5を参照しながら本発明を詳細に説明する。
【0011】
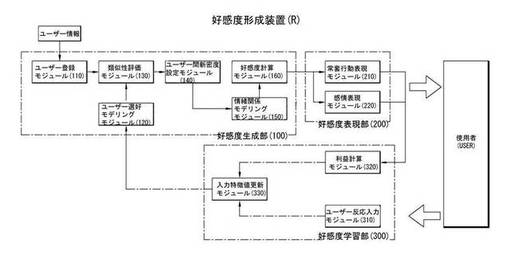
図1は、本発明の1実施形態によるロボットの好感度形成装置Rの全体構成図である。全体的に大別して好感度生成部100、好感度表現部200及び好感度学習部300とを包含して構成されている。
【0012】
前記好感度生成部100は、ユーザーの入力する特徴値の入力を受けてロボットとユーザーとの個人的な親密度mriを計算するとともに、ロボットrとユーザーiとが他のユーザーとの関係の中で形成する緊張度Briを計算して、ユーザーに対するロボットの好感度を計算する機能を行う。また、この好感度生成部100は、ユーザーの情報を登録するユーザー登録モジュール110、ユーザー選好モデリングモジュール120、類似性評価モジュール130、ユーザー間親密度設定モジュール140、情緒関係モデリングモジュール150、及び好感度計算モジュール160を含めて構成されている。
【0013】
具体的に、前記のユーザー登録モジュール110は、ユーザーのロボットに対する制御権の程度、所属感の程度などに関する入力特徴値の入力を受けてこの情報を登録する機能を行う。前記入力特徴値とは、ユーザーのロボットに対する制御権の程度及びユーザーとロボットとの所属感の程度を包含する‘ユーザーの情報’を意味する。このような入力特徴値は[0,1]の常数値に変換して入力を受けて登録する。例えば、ユーザーがロボットの主人である場合、制御権の程度が高く、また所属感の程度も高いユーザーとしてf(1,1)で入力されるとともに、ユーザーがお客である場合、制御権の程度が低く、また所属感は中間程度のユーザーとしてf=(0.2,0.5)で入力されることになる。
【0014】
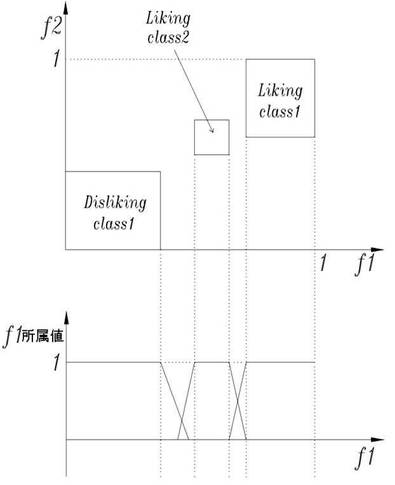
次のユーザー選好モデリングモジュール120は、ロボットが選好するユーザーのモデルを貯蔵する機能を行うが、前記入力特徴値によって構成されたFMMNNハイパーボックス・モデル(Fuzzy Min−Max Neural Network Hyperbox Model)で構成される。即ち、図2に図示したように、選好度の高いクラス(c1)と選好度の低いクラス(c2)に対するハイパーボックスを形成する。
【0015】
次の類似性評価モジュール130は、前記入力特徴値ベクター位置の各クラスに対する所属値、即ち、親密度mriを計算する機能を有している。次の式1にmriの計算式を示す。
【0016】
(式1)

【0017】
次のユーザー間の親密度設定モジュール140は、初めて登録するユーザーと、既に登録されたユーザーとの間の親密度を設定する機能を行う。即ち、初めて登録するユーザーから既に登録されたユーザーとの間の親密度の入力を受ける(好きなヒト:+1、嫌いなヒト:−1、知らないヒト:0に入力)。
【0018】
その後、ユーザー間の物理的距離、インタラクションの回数、社会的関係の変化などの情報を利用して親密度mriを更新することができる。例えば、2人のユーザーがロボットの周辺で同時にインタラクションする回数が多くなり、2人のユーザー間の対話の距離が近寄る場合、ロボットは2人のユーザー間の親密度が高くなっていると予測することができる。
【0019】
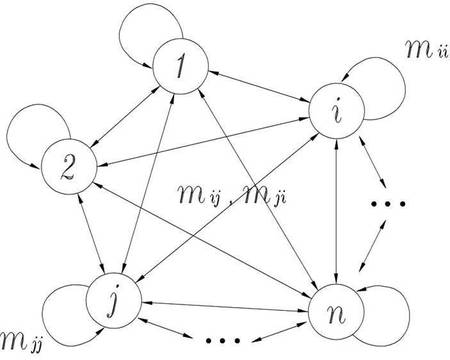
次の情緒関係モデリングモジュール150は、前記ユーザー間の親密度設定モジュール140から初めて登録するユーザーと、既に登録されたユーザーとの間の親密度、即ち、ユーザー間の親密度の入力を受けることによって、図3のように、情緒関係ネットワークの中でロボットrとユーザーiとが他のユーザーとの関係の中で形成する社会的緊張度Briを計算する機能を果す。このとき下記の式2によって計算する。
【0020】
(式2)
【0021】
n:インタラクションしている個体の総数、ロボット+(n−1)名のユーザー
mab:aが感じるbに対する親密度であって、[−1,+1]の常数値に変換して入力を受ける。例えば、嫌いだ:−1、好きだ:+1、知らない:0
mri:ロボットが感じるユーザーiに対する親密度
mir:ユーザーiが感じるロボットに対する親密度
GDyad(i):ロボットとユーザーi間の情緒関係の均衡インデックスであり、+1の場合は均衡状態、0の場合は不均衡状態である。
【0022】
GTriad(i,j):ロボットとユーザーi、j間の情緒関係の均衡インデックスであり、+1の場合は均衡状態、0の場合は不均衡状態である。
【0023】
Bri:ロボットrとユーザーiが他のユーザーとの関係の中で形成する社会的緊張の均衡程度であって、全体関係ノード数に対する均衡関係のノード数、即ち、1に近い場合は、ロボットとユーザーi間の社会的情緒関係が均衡を良く形成していると判断することができる。
【0024】
次の好感度計算モジュール160は、前記類似性評価モジュール130によって計算されたロボットとユーザーとの個人的な親密度mriと、情緒関係モデリングモジュール150によって計算された緊張度Briを下記の式3に適用して、ユーザーに対するロボットの好感度Liを計算する機能を行う。
【0025】
(式3)
【0026】
式中、Li(=[0,1])は、ユーザーiに対するロボットの好感度であり、λ(=[0,1])は、2つの変数の好感度に及ぼす影響に対する加重値を示す。
【0027】
次いで、好感度表現部200は、前記好感度生成部100を通じて生成されたロボットの好感度に従って、ロボットの感情強度を調節し、ロボットの行動の前・後に好感度を表現する行動を付け加えて表現する機能を行うが、常套行動表現モジュール210及び感情表現モジュール220とを含めて構成される。
【0028】
具体的に前記の常套行動表現モジュール210は、ロボットの行動の前・後に好感度を表現する行動を付け加えて表現する機能を有している。
【0029】
ここで、前記の常套行動は、ロボットがサービスを実行するための主行動の前・後に、ロボットの個性または感情状態を表現することができるように設定している固定された行動であって、これは、ロボットが実行するサービスに影響を与えることなしに、ロボットがユーザーに対して自在に自分の感情的意図を表現させるためである。即ち、嫌いなユーザーの呼出しの時、ユーザーに近寄るサービス行動をする前に気色の‘窺い’という事前常套行動を入力し、ユーザーに到着した後には‘視線をそらす’などという事後常套行動を入力してロボットの好感度を表現することができる。
【0030】
次の感情表現モジュール220は、現在のイベントによって感情生成のモジュールから発生した感情の強度を好感度の水準に従って調節して好感度を表示し、次のルールによって感情の強度が決定される。
【0031】
即ち、ユーザーiに対するロボットの好感度Liが肯定的に高い場合、肯定的感情は強化されるとともに、否定的感情は弱化される。反対に、ユーザーiに対するロボットの好感度Liが否定的に高い場合、肯定的感情は弱化されるとともに、否定的感情は強化される。
【0032】
次の好感度学習部300は、前記好感度表現部200で計算されたユーザーに対するロボットの好感度表現程度とユーザーの感情的反応に対する入力を受けて、両情報の差異に基づいて利益を計算し、これを利用してユーザーの入力特徴値を更新する機能を果す装置であって、ユーザー反応入力モジュール310、利益計算モジュール320及び入力特徴値更新モジュール330とを包含して構成される。
【0033】
より具体的には、前記のユーザー反応入力モジュール310では、ユーザーの音声情報またはタッチ情報などを通じてユーザーの感情的反応の入力を受ける機能を行う。即ち、ユーザーの感情状態を、「喜び」、「怒り」、「中立」にして認識するとともに肯定的な報答と、否定的な報答として、その評価を区分する機能を果す。
【0034】
また、利益計算モジュール320では、前記好感度表現部200で計算された好感度表現の程度と前記のユーザー反応入力モジュール310とを通じて入力されたユーザーの音声情報またはタッチ情報などを含むユーザーの感情的反応に基づいて、利益を計算する機能を果す。即ち、ロボットがサービスを実行するために、努力した手間(Effort)とこの手間に対するユーザーの感情的反応に基づいて利益(Profit)を計算する機能を有するのである。
【0035】
より詳細には、ユーザー呼出しの時のロボットの手間は、まずユーザーに接近するべくロボットが取る行動に要するステップの数によって計算される。また、接近した後にユーザーの感情的反応をタッチ情報または音声情報から取り入れた後、認識した感情が‘喜び’である場合は、肯定的な報答(Reward)として計算し、‘怒り’である場合は、否定的な報答(Punishment)として計算する。
【0036】
2つの値は、[−1,1]間の実数値で正規化され、次の式4によってロボットの行動に対する利益(profit)が決定される。
【0037】
(式4)
【0038】
式中、pはロボットの利益、rはユーザーからの反応の報答程度、cはロボットが実行したサービスに要した手間の程度を示す。
【0039】
次の入力特徴値更新モジュール330は、前記利益計算モジュール320で計算された利益からユーザーの入力特徴値を更新する機能を有している。
【0040】
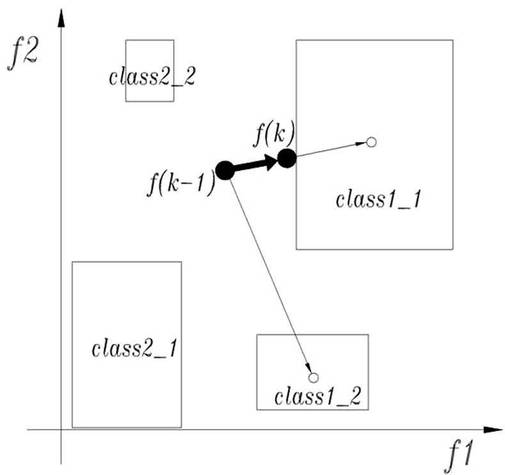
即ち、利益計算モジュール320によって計算された利益pを利用して漸増的学習方法(incremental learning)を実行する。下記の式5のように、p値の入力を受けて、ユーザーの入力情報である制御権f1と所属感f2のハイパー空間上における位置を更新して、新しい親密度の値を得ることになる。図4で示すように、更新された特徴ベクターは、目的とするハイパーボックスに向かって移動するようになり、そのときの所属値がさらに計算されて親密度の値が更新されるようになる。
【0041】
(式5)
【0042】
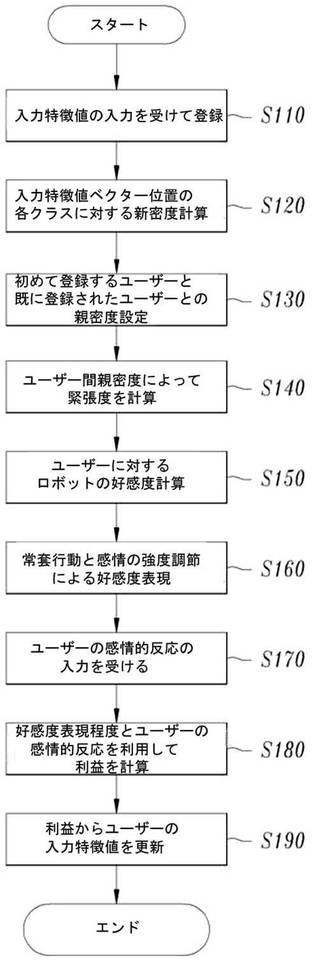
次は、図5のフローチャートに沿って、本発明の1実施形態における上述したロボットの好感度形成装置Rによる、ロボットの好感度形成方法について説明する。
【0043】
まず、好感度生成部100のユーザー登録モジュール110で、ユーザーの制御権の程度及び所属感の程度に関する入力特徴値の入力を受けて登録する段階(S110)。次は、類似性評価モジュール130で、前記入力特徴値ベクター位置の各クラスに対する所属値、即ち、親密度mriを計算する段階(S120)。
【0044】
次いで、ユーザー間の親密度を設定するモジュール140で、初めて登録するユーザーと既に登録されているユーザーとの親密度を設定する段階(S130)、情緒関係モデリングモジュール150で、前記ユーザー間の親密度設定モジュール140によって初めて登録するユーザーと、既に登録されているユーザー間の親密度mri、即ち、ユーザー間の親密度の入力を受けることによって、ロボットrとユーザーiとが他のユーザーとの関係の中で形成する緊張度Briを計算する段階(S140)、好感度計算モジュール160で、前記類似性評価モジュール130を通じて計算されたロボットとユーザー間の個人的な親密度と、情緒関係モデリングモジュール150を通じて計算された緊張度を利用して、ユーザーに対するロボットの好感度Liを計算する段階(S150)。
【0045】
その後、好感度表現部200の常套行動表現モジュール210及び感情表現モジュール220で、計算されたロボットの好感度によってロボットの常套行動と感情の強度を調節して好感度を表現する段階(S160)。
【0046】
次の好感度学習部300のユーザー反応入力モジュール310は、ユーザーの音声情報またはタッチ情報などを通じてユーザーの感情的反応の入力を受ける段階(S170)、利益計算モジュール320で、前記好感度表現部200を通じて計算されたユーザーに対するロボットの好感度表現程度と、前記ユーザーの感情的反応を利用して利益を計算する段階(S180)、入力特徴値更新部330で、前記利益計算モジュール320によって計算された利益からユーザーの入力特徴値を更新する段階(S190)、とを経てロボットの好感度を形成する各段階を終了する。
【0047】
以上、本発明の好ましい実施形態を例示して説明したが、本発明はこれに限定されるものではなく、本発明の技術的思想の範囲の内で、多様な変更及び修正が可能である。即ち、本発明に係る全ての適切な変更及び修正と均等物なども本発明の範囲に属することを明らかにする。
【図面の簡単な説明】
【0048】
【図1】本発明の1実施形態によるロボットの好感度形成装置Rの全体構成図である。
【図2】本発明の1実施形態によるユーザーの入力特徴値によって構成されたFMMNNハイパーボックスモデルを示す模式図である。
【図3】本発明の1実施形態によるロボットと多数ユーザー間の緊張度に基づく情緒関係ネットワークを示す模式図である。
【図4】本発明の1実施形態によるハイパーボックス上で更新された特徴ベクターに従って所属値がさらに計算されて親密度値が更新される様子を示す模式図である。
【図5】本発明の1実施形態によるロボットの好感度を形成する方法を説明するフローチャートである。
【符号の説明】
【0049】
100:好感度生成部
110:ユーザー登録モジュール
120:ユーザー選好モデリングモジュール
130:類似性評価モジュール
140:ユーザー間親密度設定モジュール
150:情緒関係モデリングモジュール
160:好感度計算モジュール
200:好感度表現部
210:常套行動表現モジュール
220:感情表現モジュール
300:好感度学習部
310:ユーザー反応入力モジュール
320:利益計算モジュール
330:入力特徴値更新モジュール
【技術分野】
【0001】
本発明は、ロボットがユーザーに対して得る好感度を評価して表現し、ロボットがユーザーの反応を通じて好感度を学習する装置及びその方法に関する。より詳細には、ユーザーの制御権、所属感に対する情報などの入力を受けてユーザーに対する親密度を計算し、他のユーザーとの関係を通じて好感度を最終的に評価して適切な行動と感情の表現を通じて好感度を表現し、これに対するユーザーの反応をタッチや音声で入力を受け好感度を学習する装置及びその方法に関する。
【背景技術】
【0002】
近年、愛玩ロボット、掃除ロボット、教育用ロボットなどがヒトの日常生活の領域で活発に使用されながら、ユーザーがロボットと情緒的に親密感を感じることができるようにする研究が重要視されている。殊に、ユーザーがロボットから感じ取る親密感(感情状態)を認識し、ヒトと類似する適切な感情表現を通じてロボットの信頼度を高める研究がHRI(ヒト・ロボットインタラクション)分野で活発に進行されている。
【0003】
これと関連して、ロボットもやはりユーザーに対する好感度を生成して積極的に表現することによって、ロボットが能動的にヒトとの関係を形成していく研究が重要になってきた。しかし、ロボットが自分の好感度をユーザーに対して効果的に表現する方法と、ユーザーの持続的な反応によって好感度を適切に学習していく方法に対する研究は今のところ世界的な視野においても未開発の状態である。
【発明の開示】
【発明が解決しようとする課題】
【0004】
本発明は、前記のような実情に基づいて案出されたものであって、ロボットとユーザー個人との親密度を計算し、ロボットと多数ユーザーとの情緒関係の緊張度を計算してロボットの好感度を生成し、ユーザーの反応によってユーザーとの親密度を更新するとともに、ユーザーの持続的な反応に従って好感度を適切に学習していくためのロボットの好感度形成装置及びその方法を提供する。
【課題を解決するための手段】
【0005】
前記のような技術的課題を解決するために、本発明は、ロボットの好感度を形成する装置及びその方法に関し、ユーザーの入力特徴値の入力を受けて、ロボットとユーザーとの個人的な親密度mriを計算し、ロボットrとユーザーiとが他のユーザーとの関係の中で形成する緊張度Briを計算して、ユーザーに対するロボットの好感度を計算する好感度生成部と、前記好感度生成部を通じて生成されたロボットの好感度によってロボットの感情強度を調節し、ロボットの行動の前・後に好感度を表現する行動を付け加えて表現する好感度表現部と、前記好感度表現部を通じて計算されたユーザーに対するロボットの好感度表現の程度と、ユーザーの感情的反応の入力を受けて、2つの情報の差異に基づいて利益(profit)を計算し、これを利用してユーザーの入力特徴値を更新する好感度学習部とを包含してなる。
【発明の効果】
【0006】
本発明によれば、ロボットとユーザーとの持続的なサービスに基づいたインタラクションを通じて、ロボットがユーザーに対して好感度を形成することにより、他のユーザーとは異なる差別化されたサービスを提供することができる。
【0007】
例えば、居住空間の中に多数のユーザーが一緒にいるとき、ロボットは自分に有る好感度の高いユーザーに近寄って視線を合わせたり、感情の強度を極大化させて表現することができ、好感度の低いユーザーの呼出しの時には、これを回避するか、ためらうか、または、気色を窺ったりするなどの常套行動を通じてインタラクションを回避する意思を表して、相対的に好感度の高いユーザーには良く追従するロボットとして認識させることができる。
【0008】
また、本発明によれば、ロボットの機能をサービス領域だけでなく、家庭用エンタテインメントロボット、教育用ロボットなどの領域でも積極的に活用することができる。
【発明を実施するための最良の形態】
【0009】
本発明の具体的な特徴及びメリットなどを添付図面に基づいて詳細に説明する。なお、本発明に係る公知機能及びその構成に対する具体的な説明が本発明の要旨を混同すると判断される場合には、その詳細な説明を省略する。
【0010】
以下、添付の図1〜図5を参照しながら本発明を詳細に説明する。
【0011】
図1は、本発明の1実施形態によるロボットの好感度形成装置Rの全体構成図である。全体的に大別して好感度生成部100、好感度表現部200及び好感度学習部300とを包含して構成されている。
【0012】
前記好感度生成部100は、ユーザーの入力する特徴値の入力を受けてロボットとユーザーとの個人的な親密度mriを計算するとともに、ロボットrとユーザーiとが他のユーザーとの関係の中で形成する緊張度Briを計算して、ユーザーに対するロボットの好感度を計算する機能を行う。また、この好感度生成部100は、ユーザーの情報を登録するユーザー登録モジュール110、ユーザー選好モデリングモジュール120、類似性評価モジュール130、ユーザー間親密度設定モジュール140、情緒関係モデリングモジュール150、及び好感度計算モジュール160を含めて構成されている。
【0013】
具体的に、前記のユーザー登録モジュール110は、ユーザーのロボットに対する制御権の程度、所属感の程度などに関する入力特徴値の入力を受けてこの情報を登録する機能を行う。前記入力特徴値とは、ユーザーのロボットに対する制御権の程度及びユーザーとロボットとの所属感の程度を包含する‘ユーザーの情報’を意味する。このような入力特徴値は[0,1]の常数値に変換して入力を受けて登録する。例えば、ユーザーがロボットの主人である場合、制御権の程度が高く、また所属感の程度も高いユーザーとしてf(1,1)で入力されるとともに、ユーザーがお客である場合、制御権の程度が低く、また所属感は中間程度のユーザーとしてf=(0.2,0.5)で入力されることになる。
【0014】
次のユーザー選好モデリングモジュール120は、ロボットが選好するユーザーのモデルを貯蔵する機能を行うが、前記入力特徴値によって構成されたFMMNNハイパーボックス・モデル(Fuzzy Min−Max Neural Network Hyperbox Model)で構成される。即ち、図2に図示したように、選好度の高いクラス(c1)と選好度の低いクラス(c2)に対するハイパーボックスを形成する。
【0015】
次の類似性評価モジュール130は、前記入力特徴値ベクター位置の各クラスに対する所属値、即ち、親密度mriを計算する機能を有している。次の式1にmriの計算式を示す。
【0016】
(式1)
【0017】
次のユーザー間の親密度設定モジュール140は、初めて登録するユーザーと、既に登録されたユーザーとの間の親密度を設定する機能を行う。即ち、初めて登録するユーザーから既に登録されたユーザーとの間の親密度の入力を受ける(好きなヒト:+1、嫌いなヒト:−1、知らないヒト:0に入力)。
【0018】
その後、ユーザー間の物理的距離、インタラクションの回数、社会的関係の変化などの情報を利用して親密度mriを更新することができる。例えば、2人のユーザーがロボットの周辺で同時にインタラクションする回数が多くなり、2人のユーザー間の対話の距離が近寄る場合、ロボットは2人のユーザー間の親密度が高くなっていると予測することができる。
【0019】
次の情緒関係モデリングモジュール150は、前記ユーザー間の親密度設定モジュール140から初めて登録するユーザーと、既に登録されたユーザーとの間の親密度、即ち、ユーザー間の親密度の入力を受けることによって、図3のように、情緒関係ネットワークの中でロボットrとユーザーiとが他のユーザーとの関係の中で形成する社会的緊張度Briを計算する機能を果す。このとき下記の式2によって計算する。
【0020】
(式2)
【0021】
n:インタラクションしている個体の総数、ロボット+(n−1)名のユーザー
mab:aが感じるbに対する親密度であって、[−1,+1]の常数値に変換して入力を受ける。例えば、嫌いだ:−1、好きだ:+1、知らない:0
mri:ロボットが感じるユーザーiに対する親密度
mir:ユーザーiが感じるロボットに対する親密度
GDyad(i):ロボットとユーザーi間の情緒関係の均衡インデックスであり、+1の場合は均衡状態、0の場合は不均衡状態である。
【0022】
GTriad(i,j):ロボットとユーザーi、j間の情緒関係の均衡インデックスであり、+1の場合は均衡状態、0の場合は不均衡状態である。
【0023】
Bri:ロボットrとユーザーiが他のユーザーとの関係の中で形成する社会的緊張の均衡程度であって、全体関係ノード数に対する均衡関係のノード数、即ち、1に近い場合は、ロボットとユーザーi間の社会的情緒関係が均衡を良く形成していると判断することができる。
【0024】
次の好感度計算モジュール160は、前記類似性評価モジュール130によって計算されたロボットとユーザーとの個人的な親密度mriと、情緒関係モデリングモジュール150によって計算された緊張度Briを下記の式3に適用して、ユーザーに対するロボットの好感度Liを計算する機能を行う。
【0025】
(式3)
【0026】
式中、Li(=[0,1])は、ユーザーiに対するロボットの好感度であり、λ(=[0,1])は、2つの変数の好感度に及ぼす影響に対する加重値を示す。
【0027】
次いで、好感度表現部200は、前記好感度生成部100を通じて生成されたロボットの好感度に従って、ロボットの感情強度を調節し、ロボットの行動の前・後に好感度を表現する行動を付け加えて表現する機能を行うが、常套行動表現モジュール210及び感情表現モジュール220とを含めて構成される。
【0028】
具体的に前記の常套行動表現モジュール210は、ロボットの行動の前・後に好感度を表現する行動を付け加えて表現する機能を有している。
【0029】
ここで、前記の常套行動は、ロボットがサービスを実行するための主行動の前・後に、ロボットの個性または感情状態を表現することができるように設定している固定された行動であって、これは、ロボットが実行するサービスに影響を与えることなしに、ロボットがユーザーに対して自在に自分の感情的意図を表現させるためである。即ち、嫌いなユーザーの呼出しの時、ユーザーに近寄るサービス行動をする前に気色の‘窺い’という事前常套行動を入力し、ユーザーに到着した後には‘視線をそらす’などという事後常套行動を入力してロボットの好感度を表現することができる。
【0030】
次の感情表現モジュール220は、現在のイベントによって感情生成のモジュールから発生した感情の強度を好感度の水準に従って調節して好感度を表示し、次のルールによって感情の強度が決定される。
【0031】
即ち、ユーザーiに対するロボットの好感度Liが肯定的に高い場合、肯定的感情は強化されるとともに、否定的感情は弱化される。反対に、ユーザーiに対するロボットの好感度Liが否定的に高い場合、肯定的感情は弱化されるとともに、否定的感情は強化される。
【0032】
次の好感度学習部300は、前記好感度表現部200で計算されたユーザーに対するロボットの好感度表現程度とユーザーの感情的反応に対する入力を受けて、両情報の差異に基づいて利益を計算し、これを利用してユーザーの入力特徴値を更新する機能を果す装置であって、ユーザー反応入力モジュール310、利益計算モジュール320及び入力特徴値更新モジュール330とを包含して構成される。
【0033】
より具体的には、前記のユーザー反応入力モジュール310では、ユーザーの音声情報またはタッチ情報などを通じてユーザーの感情的反応の入力を受ける機能を行う。即ち、ユーザーの感情状態を、「喜び」、「怒り」、「中立」にして認識するとともに肯定的な報答と、否定的な報答として、その評価を区分する機能を果す。
【0034】
また、利益計算モジュール320では、前記好感度表現部200で計算された好感度表現の程度と前記のユーザー反応入力モジュール310とを通じて入力されたユーザーの音声情報またはタッチ情報などを含むユーザーの感情的反応に基づいて、利益を計算する機能を果す。即ち、ロボットがサービスを実行するために、努力した手間(Effort)とこの手間に対するユーザーの感情的反応に基づいて利益(Profit)を計算する機能を有するのである。
【0035】
より詳細には、ユーザー呼出しの時のロボットの手間は、まずユーザーに接近するべくロボットが取る行動に要するステップの数によって計算される。また、接近した後にユーザーの感情的反応をタッチ情報または音声情報から取り入れた後、認識した感情が‘喜び’である場合は、肯定的な報答(Reward)として計算し、‘怒り’である場合は、否定的な報答(Punishment)として計算する。
【0036】
2つの値は、[−1,1]間の実数値で正規化され、次の式4によってロボットの行動に対する利益(profit)が決定される。
【0037】
(式4)
【0038】
式中、pはロボットの利益、rはユーザーからの反応の報答程度、cはロボットが実行したサービスに要した手間の程度を示す。
【0039】
次の入力特徴値更新モジュール330は、前記利益計算モジュール320で計算された利益からユーザーの入力特徴値を更新する機能を有している。
【0040】
即ち、利益計算モジュール320によって計算された利益pを利用して漸増的学習方法(incremental learning)を実行する。下記の式5のように、p値の入力を受けて、ユーザーの入力情報である制御権f1と所属感f2のハイパー空間上における位置を更新して、新しい親密度の値を得ることになる。図4で示すように、更新された特徴ベクターは、目的とするハイパーボックスに向かって移動するようになり、そのときの所属値がさらに計算されて親密度の値が更新されるようになる。
【0041】
(式5)
【0042】
次は、図5のフローチャートに沿って、本発明の1実施形態における上述したロボットの好感度形成装置Rによる、ロボットの好感度形成方法について説明する。
【0043】
まず、好感度生成部100のユーザー登録モジュール110で、ユーザーの制御権の程度及び所属感の程度に関する入力特徴値の入力を受けて登録する段階(S110)。次は、類似性評価モジュール130で、前記入力特徴値ベクター位置の各クラスに対する所属値、即ち、親密度mriを計算する段階(S120)。
【0044】
次いで、ユーザー間の親密度を設定するモジュール140で、初めて登録するユーザーと既に登録されているユーザーとの親密度を設定する段階(S130)、情緒関係モデリングモジュール150で、前記ユーザー間の親密度設定モジュール140によって初めて登録するユーザーと、既に登録されているユーザー間の親密度mri、即ち、ユーザー間の親密度の入力を受けることによって、ロボットrとユーザーiとが他のユーザーとの関係の中で形成する緊張度Briを計算する段階(S140)、好感度計算モジュール160で、前記類似性評価モジュール130を通じて計算されたロボットとユーザー間の個人的な親密度と、情緒関係モデリングモジュール150を通じて計算された緊張度を利用して、ユーザーに対するロボットの好感度Liを計算する段階(S150)。
【0045】
その後、好感度表現部200の常套行動表現モジュール210及び感情表現モジュール220で、計算されたロボットの好感度によってロボットの常套行動と感情の強度を調節して好感度を表現する段階(S160)。
【0046】
次の好感度学習部300のユーザー反応入力モジュール310は、ユーザーの音声情報またはタッチ情報などを通じてユーザーの感情的反応の入力を受ける段階(S170)、利益計算モジュール320で、前記好感度表現部200を通じて計算されたユーザーに対するロボットの好感度表現程度と、前記ユーザーの感情的反応を利用して利益を計算する段階(S180)、入力特徴値更新部330で、前記利益計算モジュール320によって計算された利益からユーザーの入力特徴値を更新する段階(S190)、とを経てロボットの好感度を形成する各段階を終了する。
【0047】
以上、本発明の好ましい実施形態を例示して説明したが、本発明はこれに限定されるものではなく、本発明の技術的思想の範囲の内で、多様な変更及び修正が可能である。即ち、本発明に係る全ての適切な変更及び修正と均等物なども本発明の範囲に属することを明らかにする。
【図面の簡単な説明】
【0048】
【図1】本発明の1実施形態によるロボットの好感度形成装置Rの全体構成図である。
【図2】本発明の1実施形態によるユーザーの入力特徴値によって構成されたFMMNNハイパーボックスモデルを示す模式図である。
【図3】本発明の1実施形態によるロボットと多数ユーザー間の緊張度に基づく情緒関係ネットワークを示す模式図である。
【図4】本発明の1実施形態によるハイパーボックス上で更新された特徴ベクターに従って所属値がさらに計算されて親密度値が更新される様子を示す模式図である。
【図5】本発明の1実施形態によるロボットの好感度を形成する方法を説明するフローチャートである。
【符号の説明】
【0049】
100:好感度生成部
110:ユーザー登録モジュール
120:ユーザー選好モデリングモジュール
130:類似性評価モジュール
140:ユーザー間親密度設定モジュール
150:情緒関係モデリングモジュール
160:好感度計算モジュール
200:好感度表現部
210:常套行動表現モジュール
220:感情表現モジュール
300:好感度学習部
310:ユーザー反応入力モジュール
320:利益計算モジュール
330:入力特徴値更新モジュール
【特許請求の範囲】
【請求項1】
ロボットの好感度形成装置において、
ユーザーの入力特徴値の入力を受けて、ロボットとユーザーとの個人的な親密度mriを計算し、ロボットrとユーザーiとが他のユーザーとの関係の中で形成する緊張度Briを計算して、ユーザーに対するロボットの好感度を計算する好感度生成部100と、
前記好感度生成部100を通じて生成されたロボットの好感度によってロボットの感情強度を調節し、ロボットの行動の前・後に好感度を表現する行動を付け加えて表現する好感度表現部200と、
前記好感度表現部200を通じて計算されたユーザーに対するロボットの好感度表現の程度と、ユーザーの感情的反応の入力を受けて、2つの情報の差異に基づいて利益(profit)を計算し、これを利用してユーザーの入力特徴値を更新する好感度学習部300とを包含することを特徴とするロボットの好感度形成装置。
【請求項2】
前記好感度生成部100は、
ユーザーの制御権の程度、所属感の程度に関する入力特徴値の入力を受けて登録するユーザー登録モジュール110と、
ロボットが選好するユーザーのモデルを貯蔵しているユーザー選好モデリングモジュール120と、
前記入力特徴値ベクター位置の各クラスに対する親密度mriを計算する類似性評価モジュール130と、
初めて登録するユーザーと、既に登録されたユーザー間の親密度mriを設定するユーザー間親密度設定モジュール140と、
前記ユーザー間親密度設定モジュール140から初めて登録するユーザーと既に登録されたユーザー間の親密度の入力を受けることによって、ロボットrとユーザーiとが他のユーザーとの関係の中で形成する緊張度Briを計算する情緒関係モデリングモジュール150と、
前記類似性評価モジュール130を通じて計算されたロボットとユーザーの個人的な親密度mriと、前記情緒関係モデリングモジュール150を通じて計算された緊張度Briを利用してユーザーに対するロボットの好感度Liを計算する好感度計算モジュール160とを包含することを特徴とする請求項1に記載のロボットの好感度形成装置。
【請求項3】
前記ユーザーに対するロボットの好感度Li(=[0,1])は、
前記ロボットとユーザーとの個人的な親密度mriと、緊張度Briに対する加重値λ(=[0,1])を通じて計算されることを特徴とする請求項2に記載のロボットの好感度形成装置。
【請求項4】
前記ユーザー選好モデリングモジュール120は、
前記入力特徴値によって構成されたハイパーボックスモデルに構成され、選好度の高いクラス(c1:Liking class)と選好度の低いクラス(c2:Disliking class)とに対するハイパーボックスを形成することを特徴とする請求項2に記載のロボットの好感度形成装置。
【請求項5】
前記好感度表現部200は、
ロボットの行動の前・後に好感度を表現する行動を付け加えて表現する常套行動表現モジュール210と、
現在のイベントによって感情生成のモジュールから発生した感情の強度を好感度の水準に従って調節して好感度を表示する感情表現モジュール220とを包含することを特徴とする請求項1に記載のロボットの好感度形成装置。
【請求項6】
前記常套行動は、ロボットがサービスを実行するための主行動の前・後に、ロボットの個性または感情状態を表現することができるように設定している固定された行動であることを特徴とする請求項5に記載のロボットの好感度形成装置。
【請求項7】
前記好感度学習部300は、
ユーザーからユーザーの音声情報またはタッチ情報を通じてユーザーの感情的反応の入力を受けるユーザー反応入力モジュール310と、
前記好感度表現部200を通じて計算された好感度表現の程度と、前記ユーザー反応入力モジュール310とを通じて入力されたユーザーの音声情報またはタッチ情報を包含するユーザーの感情的反応に基づいて、利益を計算する利益計算モジュール320と、
前記利益計算モジュール320で計算された利益からユーザーの入力特徴値を更新する入力特徴値更新モジュール330と、を包含してなることを特徴とする請求項1に記載のロボットの好感度形成装置。
【請求項8】
ユーザー反応入力モジュール310は、ユーザーからのユーザーの音声情報またはタッチ情報を通じて、「喜び」、「怒り」、「中立」の中いずれか1つに認識するとともに、肯定的な報答と否定的な報答として評価することを特徴とする請求項1に記載のロボットの好感度形成装置。
【請求項9】
ロボットの好感度形成方法において、
(a)好感度生成部100が、ユーザーの制御権の程度及び所属感の程度に関する入力特徴値の入力を受けて登録する段階と、
(b)前記好感度生成部100が、前記入力特徴値ベクター位置の各クラスに対する親密度mriを計算する段階と、
(c)前記好感度生成部100が、初めて登録するユーザーと既に登録されたユーザーとの親密度mriを設定して、ロボットrとユーザーiとが他のユーザーとの関係の中で形成する緊張度Briを計算する段階と、
(d)前記好感度生成部100が、前記(b)段階を通じて計算したロボットとユーザーとの個人的な親密度mriと、前記(c)段階を通じて計算した緊張度Briを利用して、ユーザーに対するロボットの好感度Liを計算する段階と、
(e)好感度表現部200が、前記好感度生成部100を通じて計算されたロボットの好感度に従って、ロボットの常套行動と感情の強度を調節して好感度を表現する段階と、
(f)好感度学習部300が、ユーザーの音声情報またはタッチ情報に基づいてユーザーの感情的反応の入力を受ける段階と、
(g)前記好感度学習部300が、前記好感度表現部200を通じて計算されたユーザーに対するロボットの好感度表現程度と、前記ユーザーの感情的反応を利用して利益を計算する段階と、
(h)前記好感度学習部300が、前記計算された利益からユーザーの入力特徴値を更新する段階とを包含することを特徴とするロボットの好感度形成方法。
【請求項10】
前記(d)段階において、前記ユーザーに対するロボットの好感度Li(=[0,1])は、前記ロボットとユーザーとの個人的な親密度mriと、緊張度Briに対する加重値λ(=[0,1])を通じて計算されることを特徴とする請求項9に記載のロボットの好感度形成方法。
【請求項11】
前記(b)段階において、前記入力特徴値は、選好度の高いクラス(c1)と、選好度の低いクラス(c2)とに対するハイパーボックスを形成することを特徴とする請求項9に記載のロボットの好感度形成方法。
【請求項12】
前記(e)段階において、前記常套行動は、ロボットがサービスを実行するための主行動の前・後に、ロボットの個性または感情状態を表現することができるように設定している固定された行動であることを特徴とする請求項9に記載のロボットの好感度形成方法。
【請求項1】
ロボットの好感度形成装置において、
ユーザーの入力特徴値の入力を受けて、ロボットとユーザーとの個人的な親密度mriを計算し、ロボットrとユーザーiとが他のユーザーとの関係の中で形成する緊張度Briを計算して、ユーザーに対するロボットの好感度を計算する好感度生成部100と、
前記好感度生成部100を通じて生成されたロボットの好感度によってロボットの感情強度を調節し、ロボットの行動の前・後に好感度を表現する行動を付け加えて表現する好感度表現部200と、
前記好感度表現部200を通じて計算されたユーザーに対するロボットの好感度表現の程度と、ユーザーの感情的反応の入力を受けて、2つの情報の差異に基づいて利益(profit)を計算し、これを利用してユーザーの入力特徴値を更新する好感度学習部300とを包含することを特徴とするロボットの好感度形成装置。
【請求項2】
前記好感度生成部100は、
ユーザーの制御権の程度、所属感の程度に関する入力特徴値の入力を受けて登録するユーザー登録モジュール110と、
ロボットが選好するユーザーのモデルを貯蔵しているユーザー選好モデリングモジュール120と、
前記入力特徴値ベクター位置の各クラスに対する親密度mriを計算する類似性評価モジュール130と、
初めて登録するユーザーと、既に登録されたユーザー間の親密度mriを設定するユーザー間親密度設定モジュール140と、
前記ユーザー間親密度設定モジュール140から初めて登録するユーザーと既に登録されたユーザー間の親密度の入力を受けることによって、ロボットrとユーザーiとが他のユーザーとの関係の中で形成する緊張度Briを計算する情緒関係モデリングモジュール150と、
前記類似性評価モジュール130を通じて計算されたロボットとユーザーの個人的な親密度mriと、前記情緒関係モデリングモジュール150を通じて計算された緊張度Briを利用してユーザーに対するロボットの好感度Liを計算する好感度計算モジュール160とを包含することを特徴とする請求項1に記載のロボットの好感度形成装置。
【請求項3】
前記ユーザーに対するロボットの好感度Li(=[0,1])は、
前記ロボットとユーザーとの個人的な親密度mriと、緊張度Briに対する加重値λ(=[0,1])を通じて計算されることを特徴とする請求項2に記載のロボットの好感度形成装置。
【請求項4】
前記ユーザー選好モデリングモジュール120は、
前記入力特徴値によって構成されたハイパーボックスモデルに構成され、選好度の高いクラス(c1:Liking class)と選好度の低いクラス(c2:Disliking class)とに対するハイパーボックスを形成することを特徴とする請求項2に記載のロボットの好感度形成装置。
【請求項5】
前記好感度表現部200は、
ロボットの行動の前・後に好感度を表現する行動を付け加えて表現する常套行動表現モジュール210と、
現在のイベントによって感情生成のモジュールから発生した感情の強度を好感度の水準に従って調節して好感度を表示する感情表現モジュール220とを包含することを特徴とする請求項1に記載のロボットの好感度形成装置。
【請求項6】
前記常套行動は、ロボットがサービスを実行するための主行動の前・後に、ロボットの個性または感情状態を表現することができるように設定している固定された行動であることを特徴とする請求項5に記載のロボットの好感度形成装置。
【請求項7】
前記好感度学習部300は、
ユーザーからユーザーの音声情報またはタッチ情報を通じてユーザーの感情的反応の入力を受けるユーザー反応入力モジュール310と、
前記好感度表現部200を通じて計算された好感度表現の程度と、前記ユーザー反応入力モジュール310とを通じて入力されたユーザーの音声情報またはタッチ情報を包含するユーザーの感情的反応に基づいて、利益を計算する利益計算モジュール320と、
前記利益計算モジュール320で計算された利益からユーザーの入力特徴値を更新する入力特徴値更新モジュール330と、を包含してなることを特徴とする請求項1に記載のロボットの好感度形成装置。
【請求項8】
ユーザー反応入力モジュール310は、ユーザーからのユーザーの音声情報またはタッチ情報を通じて、「喜び」、「怒り」、「中立」の中いずれか1つに認識するとともに、肯定的な報答と否定的な報答として評価することを特徴とする請求項1に記載のロボットの好感度形成装置。
【請求項9】
ロボットの好感度形成方法において、
(a)好感度生成部100が、ユーザーの制御権の程度及び所属感の程度に関する入力特徴値の入力を受けて登録する段階と、
(b)前記好感度生成部100が、前記入力特徴値ベクター位置の各クラスに対する親密度mriを計算する段階と、
(c)前記好感度生成部100が、初めて登録するユーザーと既に登録されたユーザーとの親密度mriを設定して、ロボットrとユーザーiとが他のユーザーとの関係の中で形成する緊張度Briを計算する段階と、
(d)前記好感度生成部100が、前記(b)段階を通じて計算したロボットとユーザーとの個人的な親密度mriと、前記(c)段階を通じて計算した緊張度Briを利用して、ユーザーに対するロボットの好感度Liを計算する段階と、
(e)好感度表現部200が、前記好感度生成部100を通じて計算されたロボットの好感度に従って、ロボットの常套行動と感情の強度を調節して好感度を表現する段階と、
(f)好感度学習部300が、ユーザーの音声情報またはタッチ情報に基づいてユーザーの感情的反応の入力を受ける段階と、
(g)前記好感度学習部300が、前記好感度表現部200を通じて計算されたユーザーに対するロボットの好感度表現程度と、前記ユーザーの感情的反応を利用して利益を計算する段階と、
(h)前記好感度学習部300が、前記計算された利益からユーザーの入力特徴値を更新する段階とを包含することを特徴とするロボットの好感度形成方法。
【請求項10】
前記(d)段階において、前記ユーザーに対するロボットの好感度Li(=[0,1])は、前記ロボットとユーザーとの個人的な親密度mriと、緊張度Briに対する加重値λ(=[0,1])を通じて計算されることを特徴とする請求項9に記載のロボットの好感度形成方法。
【請求項11】
前記(b)段階において、前記入力特徴値は、選好度の高いクラス(c1)と、選好度の低いクラス(c2)とに対するハイパーボックスを形成することを特徴とする請求項9に記載のロボットの好感度形成方法。
【請求項12】
前記(e)段階において、前記常套行動は、ロボットがサービスを実行するための主行動の前・後に、ロボットの個性または感情状態を表現することができるように設定している固定された行動であることを特徴とする請求項9に記載のロボットの好感度形成方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2009−266200(P2009−266200A)
【公開日】平成21年11月12日(2009.11.12)
【国際特許分類】
【出願番号】特願2008−324945(P2008−324945)
【出願日】平成20年12月22日(2008.12.22)
【出願人】(592127149)韓国科学技術院 (129)
【氏名又は名称原語表記】KOREA ADVANCED INSTITUTE OF SCIENCE AND TECHNOLOGY
【住所又は居所原語表記】373−1,Gusung−dong,Yuseong−ku,Daejeon 305−701 KR
【Fターム(参考)】
【公開日】平成21年11月12日(2009.11.12)
【国際特許分類】
【出願日】平成20年12月22日(2008.12.22)
【出願人】(592127149)韓国科学技術院 (129)
【氏名又は名称原語表記】KOREA ADVANCED INSTITUTE OF SCIENCE AND TECHNOLOGY
【住所又は居所原語表記】373−1,Gusung−dong,Yuseong−ku,Daejeon 305−701 KR
【Fターム(参考)】
[ Back to top ]