
ロボットの操縦システム
【課題】ロボットの操縦で左右で対称的な動作を定義しておき、これを選択することによって操縦する場合が多いが、ロボットは始終向きを変えるため、どちらが左でどちらが右か直感的にはわからないことが多い。そのために操縦が難しくなり、もたもたすることになって素早い操縦ができなくなる。
【解決手段】ロボットの向きβを検出できる手段を設け、操縦器にはジョイスティックを設ける。動作を選択し、ジョイスティックを動作させたい側に倒すことで方向角αが得られる。αーβの値を使って左右のどちらであるかを決定し、ロボットに動作をさせる。操縦者は動作をさせたい側をジョイスティックで指示すればよいだけなので素早く、間違いの無い操縦ができる。
【解決手段】ロボットの向きβを検出できる手段を設け、操縦器にはジョイスティックを設ける。動作を選択し、ジョイスティックを動作させたい側に倒すことで方向角αが得られる。αーβの値を使って左右のどちらであるかを決定し、ロボットに動作をさせる。操縦者は動作をさせたい側をジョイスティックで指示すればよいだけなので素早く、間違いの無い操縦ができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は操縦器を使い無線信号で、ロボットを操縦する技術に関する。
【背景技術】
【0002】
ロボットの操縦技術では一般に次の方法が使われている。一連の動作をひとつのプログラムとして作成し、作成された多数のプログラムを操縦器の多数の押しボタンスイッチなどに割り当て、どのスイッチを押すかによってロボットを操縦する。
【特許文献1】再表2001ー095043
【発明の開示】
【発明が解決しようとする課題】
【0003】
背景技術で説明したような、多数のプログラムから目的のプログラムを選ぶのは操縦者にはたいへん苦労になる。左右対称の動作も多くあるが、左か右かを選ぶ場合、ロボットは、始終、向きを変えるので、どちらが左でどちらが右かを見分けるのに時間がかかる事もあり、ロボットにすばやい動作をさせるのが難しい。また同じ動作でも左右で別の動作になるので、押しボタンスイッチの数が多くなり、操縦がやりにくい。
【課題を解決するための手段】
【0004】
ロボットの動作は、いろいろあるが、これをカテゴリーに分類し、分類されたカテゴリーのなかで動作概念が方向でその動作を特定できる場合が多い。また、動作概念の方向は左と右である場合も多い。
このシステムに、操縦者から見たロボットの向きβを検出する手段を設け、操縦器には動作カテゴリーのボタンと、方向αを入力するジョイスティックを設ける。
操作は、まず行いたい動作カテゴリーのボタンを押す。そしてロボットの見かけ上そのカテゴリーの動作させたい側にジョイスティックを倒す。
【0005】
操縦者は左とか右とかを意識する必要は無く、直感的にロボットの動作をさせたい側をジョイスティックで指示するだけでよい。そうすることで、すばやいロボット操縦を間違いなく行うことができる。
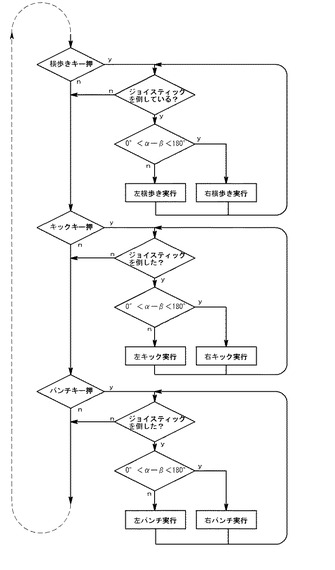
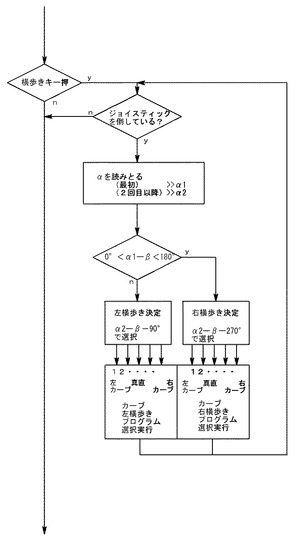
ロボットが動作カテゴリーとジョイスティックからの方向角αとロボットの向きβを得たときの動作フローチャートを第3図に示す。操縦器内のジョイスティックや各キーの情報はすべてロボット側に送られてきているので、その情報をもとに、図3のフローチャートのように動作を選択して動かすことができる。
【0006】
カテゴリーが横歩きの場合は、まず横歩きキーをおすとジョイスティックを倒したかどうかを調べ、ジョイスティックを倒していればαーβを調べる。0と180°の間であれば右方向が選択されていることがわかり右方向に横歩きが始まる。αーβが180°から360°の間ならば左方向が選択されていることがわかり、左方向に横歩きが始まる。但し本来の選択点はαーβが90°と270°であるが指定誤差を+−90°容認するために0から180°の間、180°から360°の間としている。
【0007】
サッカーゲームの場合のキックや格闘技のパンチなども同様にして、選択キーとジョイスティックによる操作で、ロボットの向きにかかわらず素早く動作をさせることができる。
また、左右真ん中の三つの動作やさらに多くの分割をして細かい動作選択も可能である。
さらに、2段階の選択を行わせることもできる。
【0008】
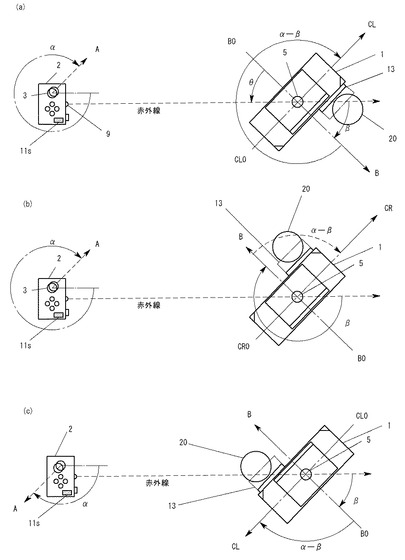
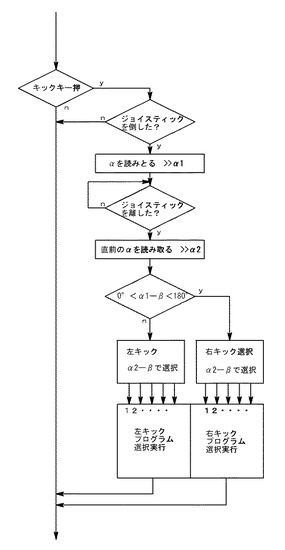
サッカーゲームでキックをするとき、まずジョイスティックを倒して得る角度α1で左右どちらの足でけるかを選択する。次にジョイスティックを倒したまままわしていくそして、ジョイスティックを離す。ジョイスティックを離したときの第2の角度α2でける方向の違うプログラムを選択することができる。ジョイスティックを離したことで中立に戻り、キックのプログラムが動いてキック動作を行う。フローチャートは図7のようになる。
頻繁に動作をさせたい項目には、専用のジョイスティックを設け、動作項目の選択ボタン操作はそのジョイスティックを倒したことの検出で代用することもできる。
【0009】
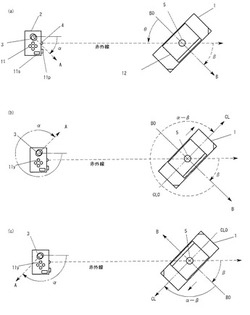
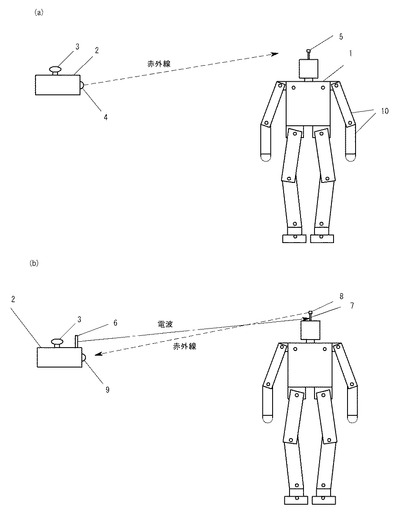
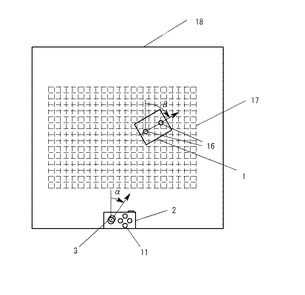
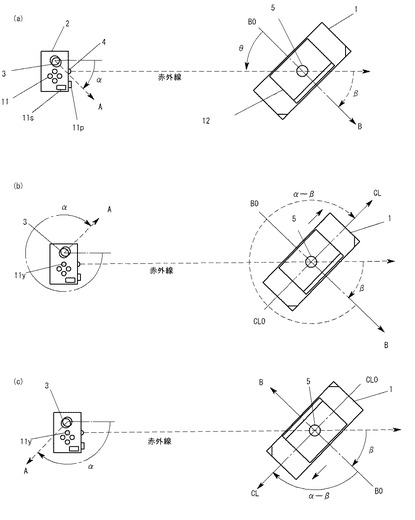
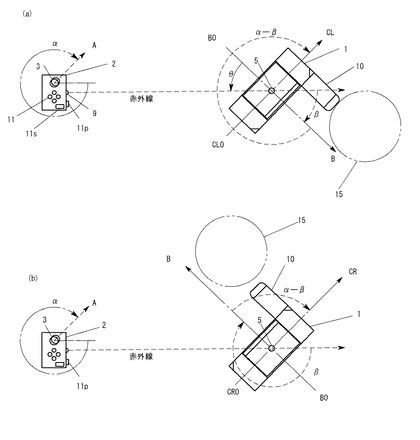
また、ロボットの向きβを検出するには、図1(a)のように、操縦器1から出る赤外線をロボット2の受光部が捕らえ、赤外線の来る方向を検知してβを求める方法や、図1(b)のように、ロボット側の赤外線発光素子を回転させ、そこから出る赤外線を操縦器2の受光部9が受光し、そのタイミングからβを得る方法や、図1(c)のようにアンテナをマトリックス状に床面に張り巡らせてロボットの2点の位置を検知し、そこから向きβを得る方法などがある。
【発明を実施するための最良の形態】
【0010】
最良の形態は、図4のように、操縦器2にはジョイスティックが一個と、いくつかの動作選択スイッチのボタンが並んでいるのが操縦が単純で覚えやすい。また、ロボットの向き変更や走行も同じジョイスティックでの走行にすると、使いやすい操縦システムになる。
【0011】
ジョイスティックだけを倒したときには、ジョイスティックを倒した方向にロボットは、方向を変えながら前進する。その他の動作については、一旦ジョイスティックを中立に戻した後、動作させたい動作スイッチを押し、動作カテゴリーを確定し、その後、ジョイスティックを倒してその動作の方向性を選択して詳細動作を特定し、実行させる。
【実施例1】
【0012】
これまでは実際のロボットの操縦であったが、これは3次元コンピュータグラフィックスで表現されるテレビゲームの中でも応用可能である。映像の中に登場するロボットをジョイスティックで操縦するということで、条件としては、同じことになる。
また俯瞰的に表現された2次元のテレビゲームでも同様である。
そして、実際のロボット操縦システムと同じように作られた映像のコントロールは、シミュレータとして訓練ようにも使える。
【実施例2】
【0013】
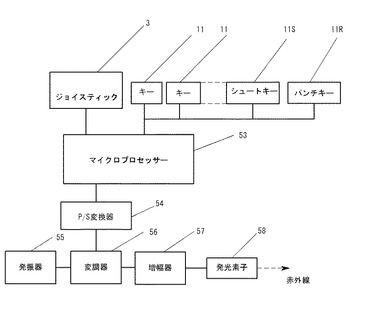
図9は操縦器2のブロック図である。ジョイスティック3と複数のキースイッチ11、11s、11R、が操縦の入力部としてマイクロプロセッサ53につながっている。出力はP/S変換器54を経て、発振器55からのキャリア信号は変調器56で変調されて増幅器57で増幅され、発光素子58から赤外線として送信される。
変調器56では無変調波も作られ方向検出信号として送出される。
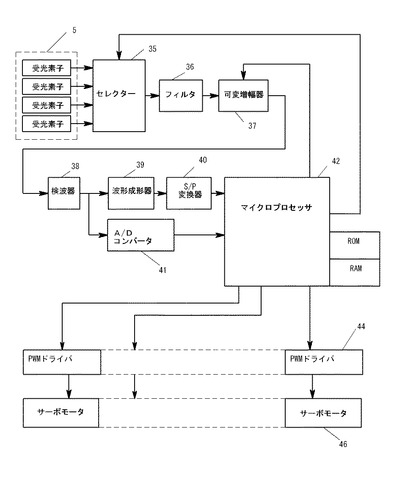
図10はロボット1のブロック図である。4個の受光素子は90°づつ方向を変えて並んでおり、すべての方向からの赤外線信号を受信すると同時に、受信した赤外線の方向ごとの信号の大きさも伝達される。セレクタ35で信号を選択し、フィルタ36でノイズを除去し、可変増幅器37で適度に増幅し検波器38で信号を取り出す。その信号は波形整形され、S/P変換器40で操縦データを取り出し、マイクロプロセッサ42で解析される。また検波後、A/Dコンバータ41を通った無変調信号は、4個の受光素子ごとに信号レベルを読み取られ、計算されて、赤外線の飛来方向θの検出に使われる。
【0014】
マイクロプロセッサ42には、多数のPWMドライバとサーボモータが接続されていて、ロボットは任意の動作ができるように作られている。
受信した操縦データにはジョイスティックの角度αやスイッチ情報がはいっていて、また、飛来方向θからは、操縦器2から見たロボットの向きβが導きだされる。図4の場合、β=θである。これらのデータを使ってロボットは多数のサーボモータを動かし、目的の動作を行う。
【図面の簡単な説明】
【0015】
【図1】本発明の全体正面図
【図2】適用される一方式の上面図
【図3】本発明のフローチャート
【図4】横方向走行の上面図
【図5】横方向走行のフローチャート
【図6】ボールを蹴る説明の上面図
【図7】ボールを蹴る時のフローチャート
【図8】ボクシングの上面図
【図9】操縦器のブロック図
【図10】ロボットのブロック図
【符号の説明】
【0016】
1 ロボット
2 操縦器
3 ジョイスティック
4 赤外発光素子
5 赤外受光部
6 アンテナ
7 アンテナ
8 赤外発光素子
9 受光素子
10 ロボットの腕
11 キースイッチ
11s 蹴るキースイッチ
11p パンチ用キースイッチ
11y 横歩き用キースイッチ
12 ロボットの頭部
13 ロボットの足先
15 敵ロボット
35 セレクタ
36 フィルタ
37 可変増幅器
38 検波器
39 波形成形器
40 S/P変換器
41 A/Dコンバータ
42 マイクロプロセッサ
44 PWMドライバ
46 サーボモータ
53 マイクロプロセッサー
54 P/S変換器
55 発振器
56 変調器
57 増幅器
58 発光素子
【技術分野】
【0001】
本発明は操縦器を使い無線信号で、ロボットを操縦する技術に関する。
【背景技術】
【0002】
ロボットの操縦技術では一般に次の方法が使われている。一連の動作をひとつのプログラムとして作成し、作成された多数のプログラムを操縦器の多数の押しボタンスイッチなどに割り当て、どのスイッチを押すかによってロボットを操縦する。
【特許文献1】再表2001ー095043
【発明の開示】
【発明が解決しようとする課題】
【0003】
背景技術で説明したような、多数のプログラムから目的のプログラムを選ぶのは操縦者にはたいへん苦労になる。左右対称の動作も多くあるが、左か右かを選ぶ場合、ロボットは、始終、向きを変えるので、どちらが左でどちらが右かを見分けるのに時間がかかる事もあり、ロボットにすばやい動作をさせるのが難しい。また同じ動作でも左右で別の動作になるので、押しボタンスイッチの数が多くなり、操縦がやりにくい。
【課題を解決するための手段】
【0004】
ロボットの動作は、いろいろあるが、これをカテゴリーに分類し、分類されたカテゴリーのなかで動作概念が方向でその動作を特定できる場合が多い。また、動作概念の方向は左と右である場合も多い。
このシステムに、操縦者から見たロボットの向きβを検出する手段を設け、操縦器には動作カテゴリーのボタンと、方向αを入力するジョイスティックを設ける。
操作は、まず行いたい動作カテゴリーのボタンを押す。そしてロボットの見かけ上そのカテゴリーの動作させたい側にジョイスティックを倒す。
【0005】
操縦者は左とか右とかを意識する必要は無く、直感的にロボットの動作をさせたい側をジョイスティックで指示するだけでよい。そうすることで、すばやいロボット操縦を間違いなく行うことができる。
ロボットが動作カテゴリーとジョイスティックからの方向角αとロボットの向きβを得たときの動作フローチャートを第3図に示す。操縦器内のジョイスティックや各キーの情報はすべてロボット側に送られてきているので、その情報をもとに、図3のフローチャートのように動作を選択して動かすことができる。
【0006】
カテゴリーが横歩きの場合は、まず横歩きキーをおすとジョイスティックを倒したかどうかを調べ、ジョイスティックを倒していればαーβを調べる。0と180°の間であれば右方向が選択されていることがわかり右方向に横歩きが始まる。αーβが180°から360°の間ならば左方向が選択されていることがわかり、左方向に横歩きが始まる。但し本来の選択点はαーβが90°と270°であるが指定誤差を+−90°容認するために0から180°の間、180°から360°の間としている。
【0007】
サッカーゲームの場合のキックや格闘技のパンチなども同様にして、選択キーとジョイスティックによる操作で、ロボットの向きにかかわらず素早く動作をさせることができる。
また、左右真ん中の三つの動作やさらに多くの分割をして細かい動作選択も可能である。
さらに、2段階の選択を行わせることもできる。
【0008】
サッカーゲームでキックをするとき、まずジョイスティックを倒して得る角度α1で左右どちらの足でけるかを選択する。次にジョイスティックを倒したまままわしていくそして、ジョイスティックを離す。ジョイスティックを離したときの第2の角度α2でける方向の違うプログラムを選択することができる。ジョイスティックを離したことで中立に戻り、キックのプログラムが動いてキック動作を行う。フローチャートは図7のようになる。
頻繁に動作をさせたい項目には、専用のジョイスティックを設け、動作項目の選択ボタン操作はそのジョイスティックを倒したことの検出で代用することもできる。
【0009】
また、ロボットの向きβを検出するには、図1(a)のように、操縦器1から出る赤外線をロボット2の受光部が捕らえ、赤外線の来る方向を検知してβを求める方法や、図1(b)のように、ロボット側の赤外線発光素子を回転させ、そこから出る赤外線を操縦器2の受光部9が受光し、そのタイミングからβを得る方法や、図1(c)のようにアンテナをマトリックス状に床面に張り巡らせてロボットの2点の位置を検知し、そこから向きβを得る方法などがある。
【発明を実施するための最良の形態】
【0010】
最良の形態は、図4のように、操縦器2にはジョイスティックが一個と、いくつかの動作選択スイッチのボタンが並んでいるのが操縦が単純で覚えやすい。また、ロボットの向き変更や走行も同じジョイスティックでの走行にすると、使いやすい操縦システムになる。
【0011】
ジョイスティックだけを倒したときには、ジョイスティックを倒した方向にロボットは、方向を変えながら前進する。その他の動作については、一旦ジョイスティックを中立に戻した後、動作させたい動作スイッチを押し、動作カテゴリーを確定し、その後、ジョイスティックを倒してその動作の方向性を選択して詳細動作を特定し、実行させる。
【実施例1】
【0012】
これまでは実際のロボットの操縦であったが、これは3次元コンピュータグラフィックスで表現されるテレビゲームの中でも応用可能である。映像の中に登場するロボットをジョイスティックで操縦するということで、条件としては、同じことになる。
また俯瞰的に表現された2次元のテレビゲームでも同様である。
そして、実際のロボット操縦システムと同じように作られた映像のコントロールは、シミュレータとして訓練ようにも使える。
【実施例2】
【0013】
図9は操縦器2のブロック図である。ジョイスティック3と複数のキースイッチ11、11s、11R、が操縦の入力部としてマイクロプロセッサ53につながっている。出力はP/S変換器54を経て、発振器55からのキャリア信号は変調器56で変調されて増幅器57で増幅され、発光素子58から赤外線として送信される。
変調器56では無変調波も作られ方向検出信号として送出される。
図10はロボット1のブロック図である。4個の受光素子は90°づつ方向を変えて並んでおり、すべての方向からの赤外線信号を受信すると同時に、受信した赤外線の方向ごとの信号の大きさも伝達される。セレクタ35で信号を選択し、フィルタ36でノイズを除去し、可変増幅器37で適度に増幅し検波器38で信号を取り出す。その信号は波形整形され、S/P変換器40で操縦データを取り出し、マイクロプロセッサ42で解析される。また検波後、A/Dコンバータ41を通った無変調信号は、4個の受光素子ごとに信号レベルを読み取られ、計算されて、赤外線の飛来方向θの検出に使われる。
【0014】
マイクロプロセッサ42には、多数のPWMドライバとサーボモータが接続されていて、ロボットは任意の動作ができるように作られている。
受信した操縦データにはジョイスティックの角度αやスイッチ情報がはいっていて、また、飛来方向θからは、操縦器2から見たロボットの向きβが導きだされる。図4の場合、β=θである。これらのデータを使ってロボットは多数のサーボモータを動かし、目的の動作を行う。
【図面の簡単な説明】
【0015】
【図1】本発明の全体正面図
【図2】適用される一方式の上面図
【図3】本発明のフローチャート
【図4】横方向走行の上面図
【図5】横方向走行のフローチャート
【図6】ボールを蹴る説明の上面図
【図7】ボールを蹴る時のフローチャート
【図8】ボクシングの上面図
【図9】操縦器のブロック図
【図10】ロボットのブロック図
【符号の説明】
【0016】
1 ロボット
2 操縦器
3 ジョイスティック
4 赤外発光素子
5 赤外受光部
6 アンテナ
7 アンテナ
8 赤外発光素子
9 受光素子
10 ロボットの腕
11 キースイッチ
11s 蹴るキースイッチ
11p パンチ用キースイッチ
11y 横歩き用キースイッチ
12 ロボットの頭部
13 ロボットの足先
15 敵ロボット
35 セレクタ
36 フィルタ
37 可変増幅器
38 検波器
39 波形成形器
40 S/P変換器
41 A/Dコンバータ
42 マイクロプロセッサ
44 PWMドライバ
46 サーボモータ
53 マイクロプロセッサー
54 P/S変換器
55 発振器
56 変調器
57 増幅器
58 発光素子
【特許請求の範囲】
【請求項1】
ロボットが操縦器で操縦されるロボット操縦システムであって、
前記操縦器は、前記操縦器上に定義した基準座標を基準にして方向αを入力する手段と、動作種別を入力する手段とを有し、
前記ロボット操縦システムは、前記操縦器から見た前記ロボットの向きβを検出する手段を有し、
前記ロボットは、前記αと前記βの差αーβと、前記動作種別とに基づいて動作を特定して実行することを特徴とするロボット操縦システム。
【請求項2】
ロボットが操縦器で操縦されるロボット操縦システムであって、
前記操縦器は、前記操縦器上に定義した基準座標を基準にして方向αを入力する手段と、動作種別を入力する手段とを有し、
前記ロボット操縦システムは、前記基準座標と一体の座標を基準にして前記ロボットの向きβを検出する手段を有し、
前記ロボットは、前記αと前記βの差αーβと、前記動作種別とに基づいて動作を特定して実行することを特徴とするロボット操縦システム。
【請求項3】
ロボットが操縦器で操縦されるロボット操縦システムであって、
前記操縦器は、前記操縦器上に定義した基準座標を基準にして方向αを入力する手段と、動作種別を入力する手段とを有し、
前記ロボット操縦システムは、地面に固定された基準座標を基準にして前記ロボットの向きβを検出する手段を有し、
前記ロボットは、前記αと前記βの差αーβと、前記動作種別とに基づいて動作を特定して実行することを特徴とするロボット操縦システム。
【請求項4】
操縦器と、無線信号により操縦される操縦ロボットと、を使ったロボット操縦システムであって、
前記操縦器は、前記操縦器を基準とした方向αを入力する手段と、走行種別を選択入力する手段とを有し、
前記ロボット操縦システムは、前記ロボットの向きβを検出する手段を有し、
前記ロボットは少なくとも左進走行と右進走行する走行手段を有し、横方向走行が選択されたとき、前記αと前記βの差αーβに基づいて左進横走行か右進横走行かの選択を決定することを特徴とするロボット操縦システム。
【請求項5】
操縦器と、無線信号により操縦される操縦ロボットと、を使ったロボット操縦システムであって、
前記操縦器は、前記操縦器を基準とした方向αを入力する手段と、動作を選択入力する手段とを有し、
前記ロボット操縦システムは、前記ロボットの向きβを検出する手段を有し、
前記ロボットは左足蹴り動作と右足蹴り動作をする手段を有し、足蹴り動作が選択されたとき、前記αと前記βの差αーβに基づいて左足蹴り動作か右足蹴り動作かの選択を決定することを特徴とするロボット操縦システム。
【請求項6】
操縦器と、無線信号により操縦される操縦ロボットとを使ったロボット操縦システムであって、
前記操縦器は、前記操縦器を基準とした方向αを入力する手段と、動作を選択入力する手段とを有し、
前記ロボット操縦システムは、前記ロボットの向きβを検出する手段を有し、
前記ロボットは左腕振り動作と右腕振り動作を行う手段を有し、腕振り動作が選択がなされたとき、前記αと前記βの差αーβに基づいて左腕振り動作か右腕振り動作かの選択を決定することを特徴とするロボット操縦システム。
【請求項1】
ロボットが操縦器で操縦されるロボット操縦システムであって、
前記操縦器は、前記操縦器上に定義した基準座標を基準にして方向αを入力する手段と、動作種別を入力する手段とを有し、
前記ロボット操縦システムは、前記操縦器から見た前記ロボットの向きβを検出する手段を有し、
前記ロボットは、前記αと前記βの差αーβと、前記動作種別とに基づいて動作を特定して実行することを特徴とするロボット操縦システム。
【請求項2】
ロボットが操縦器で操縦されるロボット操縦システムであって、
前記操縦器は、前記操縦器上に定義した基準座標を基準にして方向αを入力する手段と、動作種別を入力する手段とを有し、
前記ロボット操縦システムは、前記基準座標と一体の座標を基準にして前記ロボットの向きβを検出する手段を有し、
前記ロボットは、前記αと前記βの差αーβと、前記動作種別とに基づいて動作を特定して実行することを特徴とするロボット操縦システム。
【請求項3】
ロボットが操縦器で操縦されるロボット操縦システムであって、
前記操縦器は、前記操縦器上に定義した基準座標を基準にして方向αを入力する手段と、動作種別を入力する手段とを有し、
前記ロボット操縦システムは、地面に固定された基準座標を基準にして前記ロボットの向きβを検出する手段を有し、
前記ロボットは、前記αと前記βの差αーβと、前記動作種別とに基づいて動作を特定して実行することを特徴とするロボット操縦システム。
【請求項4】
操縦器と、無線信号により操縦される操縦ロボットと、を使ったロボット操縦システムであって、
前記操縦器は、前記操縦器を基準とした方向αを入力する手段と、走行種別を選択入力する手段とを有し、
前記ロボット操縦システムは、前記ロボットの向きβを検出する手段を有し、
前記ロボットは少なくとも左進走行と右進走行する走行手段を有し、横方向走行が選択されたとき、前記αと前記βの差αーβに基づいて左進横走行か右進横走行かの選択を決定することを特徴とするロボット操縦システム。
【請求項5】
操縦器と、無線信号により操縦される操縦ロボットと、を使ったロボット操縦システムであって、
前記操縦器は、前記操縦器を基準とした方向αを入力する手段と、動作を選択入力する手段とを有し、
前記ロボット操縦システムは、前記ロボットの向きβを検出する手段を有し、
前記ロボットは左足蹴り動作と右足蹴り動作をする手段を有し、足蹴り動作が選択されたとき、前記αと前記βの差αーβに基づいて左足蹴り動作か右足蹴り動作かの選択を決定することを特徴とするロボット操縦システム。
【請求項6】
操縦器と、無線信号により操縦される操縦ロボットとを使ったロボット操縦システムであって、
前記操縦器は、前記操縦器を基準とした方向αを入力する手段と、動作を選択入力する手段とを有し、
前記ロボット操縦システムは、前記ロボットの向きβを検出する手段を有し、
前記ロボットは左腕振り動作と右腕振り動作を行う手段を有し、腕振り動作が選択がなされたとき、前記αと前記βの差αーβに基づいて左腕振り動作か右腕振り動作かの選択を決定することを特徴とするロボット操縦システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2008−194188(P2008−194188A)
【公開日】平成20年8月28日(2008.8.28)
【国際特許分類】
【出願番号】特願2007−31469(P2007−31469)
【出願日】平成19年2月13日(2007.2.13)
【出願人】(300038435)
【Fターム(参考)】
【公開日】平成20年8月28日(2008.8.28)
【国際特許分類】
【出願日】平成19年2月13日(2007.2.13)
【出願人】(300038435)
【Fターム(参考)】
[ Back to top ]