
ロボットの移動制御システム、ロボットの移動制御プログラムおよびロボットの移動制御方法
【構成】移動制御システム100は、役割データベース(20)を備える中央制御装置10および役割が設定されたロボット14を有する。また、役割データベース(20)は、役割を持った人間の代表移動行動データから構成される。たとえば、ロボット14に「話しかけやすい警備員」の役割が設定されている場合、「話しかけやすい警備員」の代表移動行動データが役割データベース(20)から選択される。また、中央制御装置10では、役割が設定されたロボット14の複数の将来位置および各将来位置における行動が代表移動行動データに基づいて予測され、予測された複数の行動のそれぞれの発生確率が算出される。そして、算出された発生確率に基づいて、ロボット14に移動行動が指示される。
【効果】システムの管理者は、役割が設定されたロボット14を、同じ役割を持った人間と同じように動作させることができる。
【効果】システムの管理者は、役割が設定されたロボット14を、同じ役割を持った人間と同じように動作させることができる。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、ロボットの移動制御システム、ロボットの移動制御プログラムおよびロボットの移動制御方法に関し、特にたとえば、ロボットの移動行動を決定する、ロボットの移動制御システム、ロボットの移動制御プログラムおよびロボットの移動制御方法に関する。
【背景技術】
【0002】
非特許文献1に開示されている、環境情報構造化システムは、大量に蓄積された人々の行動から、環境の意味や行動を理解し、人々の大局行動を予測する。そして、予測された結果を利用して、ロボットは、特定の大局行動を行う人間に対して、サービスを提供することができる。
【非特許文献1】Takayuki Kanda, Dylan F. Glas, Masahiro Shiomi, Hiroshi Ishiguro and Norihiro Hagita, Who will be the customer?: A social robot that anticipates people’s behavior from their trajectories, Tenth International Conference on Ubiquitous Computing (UbiComp 2008), pp.380-389, 2008
【発明の概要】
【発明が解決しようとする課題】
【0003】
ところが、大量に蓄積された人々の行動を利用して、ロボットの移動行動を決定するようなシステムは存在しなかった。
【0004】
それゆえに、この発明の主たる目的は、新規な、ロボットの移動制御システム、ロボットの移動制御プログラムおよびロボットの移動制御方法を提供することである。
【0005】
この発明の他の目的は、役割が設定されたロボットの移動行動を決定することができる、ロボットの移動制御システム、ロボットの移動制御プログラムおよびロボットの移動制御方法を提供することである。
【課題を解決するための手段】
【0006】
この発明は、上記の課題を解決するために、以下の構成を採用した。なお、括弧内の参照符号および補足説明等は、この発明の理解を助けるために記述する実施形態との対応関係を示したものであって、この発明を何ら限定するものではない。
【0007】
第1の発明は、役割を持った複数の人間の移動行動データから構成されるデータベースおよび役割が設定されるロボットを含む、ロボットの移動制御システムであって、ロボットに設定された役割に基づいてデータベースから移動行動データを選択する選択手段、選択手段によって選択された移動行動データからロボットの複数の移動行動を予測する第1予測手段、第1予測手段によって予測された複数の移動行動のそれぞれの発生確率を算出する算出手段、および算出手段によって算出された複数の発生確率に基づいて、ロボットに移動行動を指示する指示手段を備える、ロボットの移動制御システムである。
【0008】
第1の発明では、移動制御システム(100:実施例において対応する部分を例示する参照符号。以下、同じ。)は、複数の移動行動データから構成されるデータベース(20)およびロボット(14)を含む。また、移動行動データは役割を持った人間の移動軌跡および行動を含み、ロボットには人間が持つ役割が設定される。たとえば、ロボットに「話しかけやすい警備員」の役割が設定されていれば、選択手段(16,S47)は、「話しかけやすい警備員」の移動行動データがデータベースから選択される。第1予測手段(16,S49)は、役割が設定されたロボットの複数の移動行動を、選択された移動行動データに基づいて予測する。算出手段(16,S57,S59)は、予測された複数の移動行動のそれぞれの発生確率を算出する。そして、指示手段(16,S61,S63)は、たとえば、算出された発生確率が最も高い移動行動を、ロボットに指示する。
【0009】
第1の発明によれば、ロボットと同じ役割を持った人間の移動行動データに基づいて、ロボットの移動行動を決定することができる。そのため、役割が設定されたロボットを、同じ役割を持った人間と同じように動作させることができる。
【0010】
第2の発明は、第1の発明に従属し、ロボットの移動軌跡を取得する移動軌跡取得手段をさらに備え、選択手段は、移動軌跡取得手段によって取得された移動軌跡、ロボットに設定された役割および各移動行動データに含まれる移動軌跡に基づいて、データベースから移動行動データを選択する。
【0011】
第2の発明では、移動軌跡取得手段(16,S45)は、たとえば、LRF(12)によって連続して取得されたロボットの現在位置を、ロボットの移動軌跡として取得する。そして、ロボットの移動軌跡役割および各移動行動データに含まれる移動軌跡に基づいて、データベースから移動行動データが選択される。
【0012】
第2の発明によれば、ロボットの現在位置やそれまでの移動を考慮して、ロボットの移動行動を決めることができる。
【0013】
第3の発明は、第1の発明または第2の発明に従属し、第1予測手段によって予測された移動行動は、ロボットの将来位置を含み、ロボットの周囲に人間が存在するとき、人間の将来位置を予測する第2予測手段をさらに備え、算出手段は、第2予測手段によって予測された人間の将来位置を除いたロボットの将来位置に基づいて、複数の移動行動の発生確率を算出する。
【0014】
第3の発明では、第1予測手段は、ロボットの移動行動として、ロボットの将来位置も予測する。第2予測手段(16,S55)は、たとえばロボットと人間とが同じ領域(E)に存在する場合、人間の将来位置を予測する。また、第2予測手段は、役割に関係なく蓄積された移動行動データに基づいて人間の将来位置を予測する。そして、算出手段は、予測された人間の将来位置が除かれたロボットの将来位置に基づいて、複数の移動行動の発生確率を算出する。
【0015】
第3の発明によれば、人間が居る位置にはロボットは進むことができないため、人間の将来位置ではロボットの移動行動が予測されないようにできる。
【0016】
第4の発明は、中央制御装置(10)、役割を持った複数の人間の移動行動データから構成されるデータベース(20)および役割が設定されるロボット(14)を含む、ロボットの移動制御システム(100)であって、中央制御装置のプロセッサ(16)を、ロボットに設定された役割に基づいてデータベースから移動行動データを選択する選択手段(S47)、選択手段によって選択された移動行動データからロボットの複数の移動行動を予測する予測手段(S49)、予測手段によって予測された複数の移動行動のそれぞれの発生確率を算出する算出手段(S57,S59)、および算出手段によって算出された複数の発生確率に基づいて、ロボットに移動行動を指示する指示手段(S61,S63)として機能させる、ロボットの移動制御プログラムである。
【0017】
第4の発明でも、第1の発明と同様、ロボットと同じ役割を持った人間の移動行動データに基づいて、ロボットの移動行動を決定することができる。そのため、役割が設定されたロボットを、同じ役割を持った人間と同じように動作させることができる。
【0018】
第5の発明は、役割を持った複数の人間の移動行動データから構成されるデータベース(20)および役割が設定されるロボット(14)を含む、ロボットの移動制御システム(100)のロボットの移動制御方法であって、ロボットに設定された役割に基づいてデータベースから移動行動データを選択し(S47)、選択された移動行動データからロボットの複数の移動行動を予測し(S49)、予測された複数の移動行動のそれぞれの発生確率を算出し(S57,S59)、そして算出された複数の発生確率に基づいて、ロボットに移動行動を指示する(S61,S63)、ロボットの移動制御方法である。
【0019】
第5の発明でも、第1の発明と同様、ロボットと同じ役割を持った人間の移動行動データに基づいて、ロボットの移動行動を決定することができる。そのため、役割が設定されたロボットを、同じ役割を持った人間と同じように動作させることができる。
【発明の効果】
【0020】
この発明によれば、ロボットと同じ役割を持った人間の移動行動データに基づいて、ロボットの移動行動が決まる。そのため、システムの管理者は、役割が設定されたロボットを、同じ役割を持った人間と同じように動作させることができる。
【0021】
この発明の上述の目的、その他の目的、特徴および利点は、図面を参照して行う以下の実施例の詳細な説明から一層明らかとなろう。
【図面の簡単な説明】
【0022】
【図1】図1はこの発明の一実施例のロボットの移動制御システムの概要を示す図解図である。
【図2】図2は図1に示すロボットの外観を正面から見た図解図である。
【図3】図3は図1に示すロボットの電気的な構成を示すブロック図である。
【図4】図4は図1に示す中央制御装置の電気的な構成を示すブロック図である。
【図5】図5は図1および図4に示すLRFの計測領域を示す図解図である。
【図6】図6は図1および図4に示すLRFを利用して検出された移動軌跡の一例を示す図解図である。
【図7】図7は図4に示す役割データベースに含まれるテーブルの一例を示す図解図である。
【図8】図8は図1に示す中央制御措置によって検出された移動行動データの一例を示す図解図である。
【図9】図9は図4に示す役割データベースに含まれる代表移動行動データの一例を示す図解図である。
【図10】図10は図1に示すロボットが移動している様子の一例を示す図解図である。
【図11】図11は図1に示すロボットの移動が制御されている様子の一例を示す図解図である。
【図12】図12は図1に示すロボットの移動が制御されている様子の他の一例を示す図解図である。
【図13】図13は図4に示すメモリのメモリマップの一例を示す図解図である。
【図14】図14は図4に示すCPUの役割データベース構築処理を示すフロー図である。
【図15】図15は図4に示すCPUの役割設定処理を示すフロー図である。
【図16】図16は図4に示すCPUの移動制御処理の一部を示すフロー図である。
【図17】図17は図4に示すCPUの移動制御処理の一部であって、図16に後続するフロー図である。
【発明を実施するための形態】
【0023】
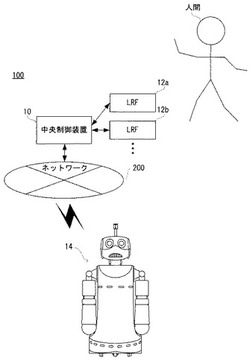
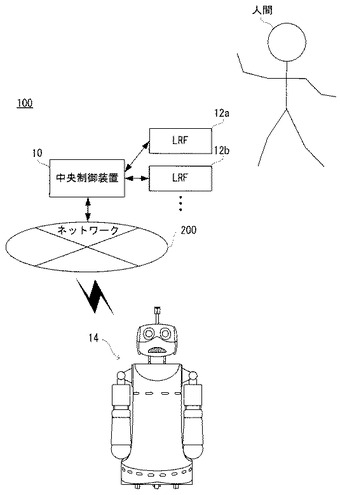
図1を参照して、この実施例のロボットの移動制御システム100は、LRF12a,12bを含む数台のLRFを有する中央制御装置10および自律移動ロボット(以下、単に「ロボット」と言う。)14を備える。LRF12a,12bは、人間が任意に移動することができる場所(環境)に設置される。なお、人間が任意に行動する場所は、会社のフロア、博物館、ショッピングモールまたはアトラクション会場などであり、LRF12a,12bは様々な場所に設置される。
【0024】
中央制御装置10は、LRF12a,12bによって、任意に移動する人間の移動軌跡を検出する。また、中央制御装置10は、LRF12a,12bなどによって取得された移動軌跡およびその移動軌跡が示す移動態様(行動)から構成される移動行動データを、データベースに蓄積する。さらに、中央制御装置10は、ネットワーク200を介して、ロボット14に役割を設定したり、役割に応じた移動行動の動作命令をロボット14に付与したりする。なお、移動態様、つまり行動は、後述する空間グリッド内における移動速度に基づいて求めることができる。
【0025】
ロボット14は、システムの管理者によって役割が設定され、中央制御装置10が付与する動作命令に基づいて動作する。また、ロボット14は、相互作用指向のロボット(コミュニケーションロボット)でもあり、人間のようなコミュニケーションの対象(コミュニケーション対象)との間で、身振り手振りのような身体動作および音声の少なくとも一方を含むコミュニケーション行動を実行する機能を備えている。
【0026】
なお、図1では簡単のため人間は1人しか示していないが、中央制御装置10は2人以上の位置を同時に検出することができる。さらに、ロボット14も同様に1台しか示していないが、中央制御装置10は2台以上のロボット14を同時に管理することができる。
【0027】
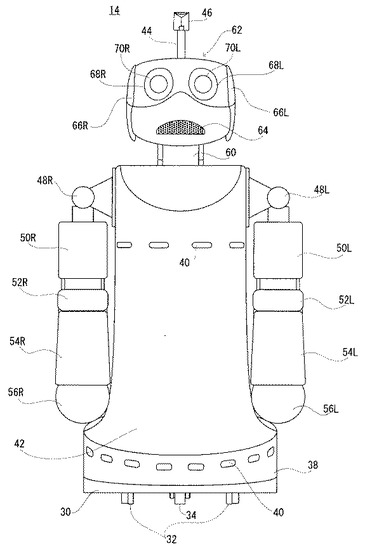
図2はこの実施例のロボット14の外観を示す正面図である。図2を参照して、ロボット14は台車30を含み、台車30の下面にはロボット14を自律移動させる2つの車輪32および1つの従輪34が設けられる。2つの車輪32は車輪モータ36(図3参照)によってそれぞれ独立に駆動され、台車30すなわちロボット14を前後左右の任意方向に動かすことができる。また、従輪34は車輪32を補助する補助輪である。したがって、ロボット14は、配置された空間内を自律制御によって移動可能である。
【0028】
台車30の上には、円柱形のセンサ取り付けパネル38が設けられ、このセンサ取り付けパネル38には、多数の赤外線距離センサ40が取り付けられる。これらの赤外線距離センサ40は、センサ取り付けパネル38すなわちロボット14の周囲の物体(人間や障害物など)との距離を測定するものである。
【0029】
なお、この実施例では、距離センサとして、赤外線距離センサを用いるようにしてあるが、赤外線距離センサに代えて、小型のLRFや、超音波距離センサおよびミリ波レーダなどを用いることもできる。
【0030】
センサ取り付けパネル38の上には、胴体42が直立するように設けられる。また、胴体42の前方中央上部(人の胸に相当する位置)には、上述した赤外線距離センサ40がさらに設けられ、ロボット14の前方の主として人間との距離を計測する。また、胴体42には、その側面側上端部のほぼ中央から伸びる支柱44が設けられ、支柱44の上には、全方位カメラ46が設けられる。全方位カメラ46は、ロボット14の周囲を撮影するものであり、後述する眼カメラ70とは区別される。この全方位カメラ46としては、たとえばCCDやCMOSのような固体撮像素子を用いるカメラを採用することができる。なお、これら赤外線距離センサ40および全方位カメラ46の設置位置は、当該部位に限定されず適宜変更され得る。
【0031】
胴体42の両側面上端部(人の肩に相当する位置)には、それぞれ、肩関節48Rおよび肩関節48Lによって、上腕50Rおよび上腕50Lが設けられる。図示は省略するが、肩関節48Rおよび肩関節48Lは、それぞれ、直交する3軸の自由度を有する。すなわち、肩関節48Rは、直交する3軸のそれぞれの軸廻りにおいて上腕50Rの角度を制御できる。肩関節48Rの或る軸(ヨー軸)は、上腕50Rの長手方向(または軸)に平行な軸であり、他の2軸(ピッチ軸およびロール軸)は、その軸にそれぞれ異なる方向から直交する軸である。同様にして、肩関節48Lは、直交する3軸のそれぞれの軸廻りにおいて上腕50Lの角度を制御できる。肩関節48Lの或る軸(ヨー軸)は、上腕50Lの長手方向(または軸)に平行な軸であり、他の2軸(ピッチ軸およびロール軸)は、その軸にそれぞれ異なる方向から直交する軸である。
【0032】
また、上腕50Rおよび上腕50Lのそれぞれの先端には、肘関節52Rおよび肘関節52Lが設けられる。図示は省略するが、肘関節52Rおよび肘関節52Lは、それぞれ1軸の自由度を有し、この軸(ピッチ軸)の軸回りにおいて前腕54Rおよび前腕54Lの角度を制御できる。
【0033】
前腕54Rおよび前腕54Lのそれぞれの先端には、人の手に相当する球体56Rおよび球体56Lがそれぞれ固定的に設けられる。ただし、指や掌の機能が必要な場合には、人間の手の形をした「手」を用いることも可能である。また、図示は省略するが、台車30の前面、肩関節48Rと肩関節48Lとを含む肩に相当する部位、上腕50R、上腕50L、前腕54R、前腕54L、球体56Rおよび球体56Lには、それぞれ、接触センサ58(図3で包括的に示す)が設けられる。台車30の前面の接触センサ58は、台車30への人間や他の障害物の接触を検知する。したがって、ロボット14は、自身の移動中に障害物との接触が有ると、それを検知し、直ちに車輪32の駆動を停止してロボット14の移動を急停止させることができる。また、その他の接触センサ58は、当該各部位に触れたかどうかを検知する。なお、接触センサ58の設置位置は、当該部位に限定されず、適宜な位置(人の胸、腹、脇、背中および腰に相当する位置)に設けられてもよい。
【0034】
胴体42の中央上部(人の首に相当する位置)には首関節60が設けられ、さらにその上には頭部62が設けられる。図示は省略するが、首関節60は、3軸の自由度を有し、3軸の各軸廻りに角度制御可能である。或る軸(ヨー軸)はロボット14の真上(鉛直上向き)に向かう軸であり、他の2軸(ピッチ軸、ロール軸)は、それぞれ、それと異なる方向で直交する軸である。
【0035】
頭部62には、人の口に相当する位置に、スピーカ64が設けられる。スピーカ64は、ロボット14が、それの周辺の人間に対して音声ないし音によってコミュニケーションを取るために用いられる。また、人の耳に相当する位置には、マイク66Rおよびマイク66Lが設けられる。以下、右のマイク66Rと左のマイク66Lとをまとめてマイク66と言うことがある。マイク66は、周囲の音、とりわけコミュニケーションを実行する対象である人間の音声を取り込む。さらに、人の目に相当する位置には、眼球部68Rおよび眼球部68Lが設けられる。眼球部68Rおよび眼球部68Lは、それぞれ眼カメラ70Rおよび眼カメラ70Lを含む。以下、右の眼球部68Rと左の眼球部68Lとをまとめて眼球部68と言うことがある。また、右の眼カメラ70Rと左の眼カメラ70Lとをまとめて眼カメラ70と言うことがある。
【0036】
眼カメラ70は、ロボット14に接近した人間の顔や他の部分ないし物体などを撮影して、それに対応する映像信号を取り込む。また、眼カメラ70は、上述した全方位カメラ46と同様のカメラを用いることができる。たとえば、眼カメラ70は、眼球部68内に固定され、眼球部68は、眼球支持部(図示せず)を介して頭部62内の所定位置に取り付けられる。図示は省略するが、眼球支持部は、2軸の自由度を有し、それらの各軸廻りに角度制御可能である。たとえば、この2軸の一方は、頭部62の上に向かう方向の軸(ヨー軸)であり、他方は、一方の軸に直交しかつ頭部62の正面側(顔)が向く方向に直行する方向の軸(ピッチ軸)である。眼球支持部がこの2軸の各軸廻りに回転されることによって、眼球部68ないし眼カメラ70の先端(正面)側が変位され、カメラ軸すなわち視線方向が移動される。なお、上述のスピーカ64、マイク66および眼カメラ70の設置位置は、当該部位に限定されず、適宜な位置に設けられてよい。
【0037】
このように、この実施例のロボット14は、車輪32の独立2軸駆動、肩関節48の3自由度(左右で6自由度)、肘関節52の1自由度(左右で2自由度)、首関節60の3自由度および眼球支持部の2自由度(左右で4自由度)の合計17自由度を有する。
【0038】
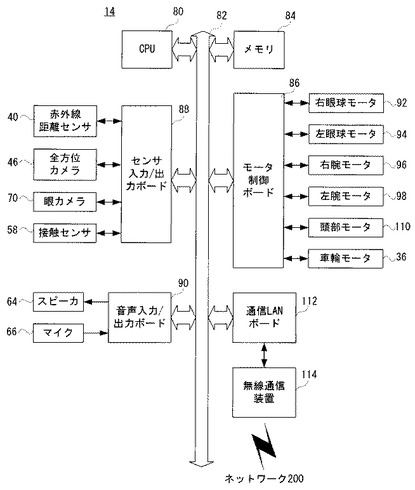
図3はロボット14の電気的な構成を示すブロック図である。この図3を参照して、ロボット14は、CPU80を含む。CPU80は、マイクロコンピュータ或いはプロセッサとも呼ばれ、バス82を介して、メモリ84、モータ制御ボード86、センサ入力/出力ボード88および音声入力/出力ボード90に接続される。
【0039】
メモリ84は、図示は省略をするが、ROMおよびRAMを含む。ROMには、ロボット14の動作を制御するための制御プログラムが予め記憶される。たとえば、各センサの出力(センサ情報)を検知するための検知プログラムや、外部コンピュータ(中央制御装置10)との間で必要なデータやコマンドを送受信するための通信プログラムなどが記録される。また、RAMは、CPU80のワークメモリやバッファメモリとして用いられる。
【0040】
モータ制御ボード86は、たとえばDSPで構成され、各腕や首関節および眼球部などの各軸モータの駆動を制御する。すなわち、モータ制御ボード86は、CPU80からの制御データを受け、右眼球部68Rの2軸のそれぞれの角度を制御する2つのモータ(図3では、まとめて「右眼球モータ92」と示す)の回転角度を制御する。同様に、モータ制御ボード86は、CPU80からの制御データを受け、左眼球部68Lの2軸のそれぞれの角度を制御する2つのモータ(図3では、まとめて「左眼球モータ94」と示す)の回転角度を制御する。
【0041】
また、モータ制御ボード86は、CPU80からの制御データを受け、肩関節48Rの直交する3軸のそれぞれの角度を制御する3つのモータと肘関節52Rの角度を制御する1つのモータとの計4つのモータ(図3では、まとめて「右腕モータ96」と示す)の回転角度を制御する。同様に、モータ制御ボード86は、CPU80からの制御データを受け、肩関節48Lの直交する3軸のそれぞれの角度を制御する3つのモータと肘関節52Lの角度を制御する1つのモータとの計4つのモータ(図3では、まとめて「左腕モータ98」と示す)の回転角度を制御する。
【0042】
さらに、モータ制御ボード86は、CPU80からの制御データを受け、首関節60の直交する3軸のそれぞれの角度を制御する3つのモータ(図3では、まとめて「頭部モータ110」と示す)の回転角度を制御する。そして、モータ制御ボード86は、CPU80からの制御データを受け、車輪32を駆動する2つのモータ(図3では、まとめて「車輪モータ36」と示す)の回転角度を制御する。なお、この実施例では、車輪モータ36を除くモータは、制御を簡素化するためにステッピングモータ(すなわち、パルスモータ)を用いる。ただし、車輪モータ36と同様に直流モータを用いるようにしてもよい。また、ロボット14の身体部位を駆動するアクチュエータは、電流を動力源とするモータに限らず適宜変更されてもよい。たとえば、他の実施例では、エアアクチュエータなどが適用されてもよい。
【0043】
センサ入力/出力ボード88は、モータ制御ボード86と同様に、DSPで構成され、各センサからの信号を取り込んでCPU80に与える。すなわち、赤外線距離センサ40のそれぞれからの反射時間に関するデータがこのセンサ入力/出力ボード88を通じてCPU80に入力される。また、全方位カメラ46からの映像信号が、必要に応じてセンサ入力/出力ボード88で所定の処理を施してからCPU80に入力される。眼カメラ70からの映像信号も、同様に、CPU80に入力される。また、上述した複数の接触センサ58(図3では、まとめて「接触センサ58」と示す)からの信号がセンサ入力/出力ボード88を介してCPU80に与えられる。音声入力/出力ボード90もまた、同様に、DSPで構成され、CPU80から与えられる音声合成データに従った音声または声がスピーカ64から出力される。また、マイク66からの音声入力が、音声入力/出力ボード90を介してCPU80に与えられる。
【0044】
また、CPU80は、バス82を介して通信LANボード112に接続される。通信LANボード112は、たとえばDSPで構成され、CPU80から与えられた送信データを無線通信装置114に与え、無線通信装置114は送信データを、ネットワーク200を介して外部コンピュータ(中央制御装置10)に送信する。また、通信LANボード112は、無線通信装置114を介してデータを受信し、受信したデータをCPU80に与える。たとえば、送信データとしては、全方位カメラ46および目カメラ70によって撮影された周囲の映像データであったりする。
【0045】
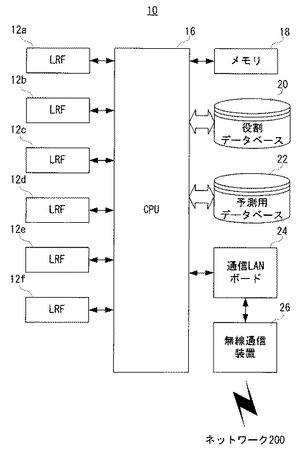
図4は中央制御装置10の電気的な構成を示すブロック図である。図4を参照して、中央制御装置10は、LRF12a−12fおよびCPU16などを含む。CPU16は、マイクロコンピュータ或いはプロセッサとも呼ばれる。また、CPU16には、先述したLRF12aおよびLRF12bに加えて、LRF12c,LRF12d,LRF12eおよびLRF12fも接続される。さらに、CPU16には、メモリ18、役割データベース20、予測用データベース22および通信LANボード24も接続される。
【0046】
なお、LRF12a−12fを区別する必要がない場合には、まとめて「LRF12」と言う。
【0047】
LRF12は、レーザーを照射し、物体(人間も含む)に反射して戻ってくるまでの時間から当該物体までの距離を計測するものである。たとえば、トランスミッタ(図示せず)から照射したレーザーを回転ミラー(図示せず)で反射させて、前方を扇状に一定角度(たとえば、0.5度)ずつスキャンする。ここで、LRF12としては、SICK社製のレーザーレンジファインダ(型式 LMS200)を用いることができる。このレーザーレンジファインダを用いた場合には、距離8mを±15mm程度の誤差で計測可能である。
【0048】
メモリ18は、図示は省略をするが、ROM,HDDおよびRAMを含み、ROMおよびHDDには、中央制御装置10の動作を制御するための制御プログラムが予め記憶される。たとえば、LRF12による人間の検出に必要なプログラムなどが記録される。また、RAMは、CPU16のワークメモリやバッファメモリとして用いられる。
【0049】
役割データベース20は、役割を持つ複数の人間の移動行動データから構成されるデータベースである。また、予測用データベース22は、人間の役割に関係なく、移動行動データが一定期間(たとえば、1週間)蓄積されたデータベースである。そして、本実施例では、役割データベース20を利用してロボット14の移動が制御され、予測用データベース22を利用して空間に存在する人間の将来位置などが予測される。
【0050】
通信LANボード24は、たとえばDSPで構成され、CPU16から与えられた送信データを無線通信装置26に与え、無線通信装置24は送信データを、ネットワーク200を介してロボット14に送信する。たとえば、送信データとしては、ロボット14に指示する動作命令の信号(コマンド)であったりする。また、通信LANボード24は、無線通信装置26を介してデータを受信し、受信したデータをCPU16に与える。
【0051】
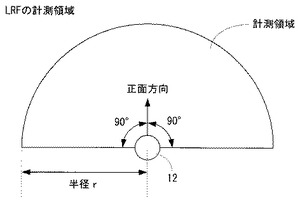
次に、LRF12について詳細に説明する。図5を参照して、LRF12の計測範囲は、半径r(r≒8m)の半円形状(扇形)で示される。つまり、LRF12は、その正面方向を中心とした場合に、左右90度の方向を所定の距離(r)以内で計測可能である。
【0052】
また、使用しているレーザーは、日本工業規格 JIS C 6802「レーザー製品の安全基準」におけるクラス1レーザーであり、人の眼に対して影響を及ぼさない安全なレベルである。また、この実施例では、LRF12のサンプリングレートを37Hzとした。これは、歩行するなどにより移動する人間の位置を連続して検出するためである。
【0053】
さらに、LRF12の各々は、検出領域が重なるように配置され、図示は省略するが、床面から約90cmの高さに固定される。この高さは、被験者の胴体と腕(両腕)とを検出可能とするためであり、たとえば、日本人の成人の平均身長から算出される。したがって、中央制御装置10を設ける場所(地域ないし国)や被験者の年齢ないし年代(たとえば、子供,大人)に応じて、LRF12を固定する高さを適宜変更するようにしてよい。なお、本実施例では、設定されるLRF12は6台としたが、2台以上であれば、任意の台数のLRF12が設置されてもよい。
【0054】
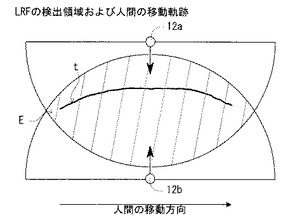
このような構成の中央制御装置10では、CPU16がLRF12からの出力(距離データ)に基づいて、パーティクルフィルタを用いて、人間の現在位置の変化を推定する。そして、推定された現在位置の変化は移動軌跡として記録される。
【0055】
たとえば、図6を参照して、LRF12a,12bは互いに向い合せに設置され、LRF12a,12bの計測範囲が重なる範囲は斜線が付されて示される。斜線が付された範囲は検出領域Eとされ、この検出領域E内では人間の現在位置が連続的に検出される。そして、連続的に検出された現在位置の変化が移動軌跡tとなる。なお、検出領域E内は、X−Y座標が設定され、人間の位置は(X,Y)の座標で示すことができる。
【0056】
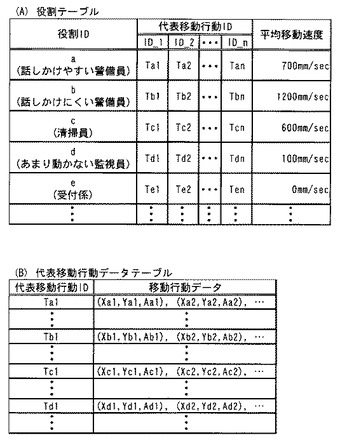
役割データベース20について詳細に説明する。役割データベース20は、図7(A)に示す役割テーブルと、図7(B)に示す代表移動行動データテーブルとを含む。
【0057】
図7(A)を参照して、役割テーブルは、役割ID、代表移動行動IDおよび平均移動速度の列から構成される。また、代表移動行動IDの列は、n(nは自然数)個の代表移動行動IDのそれぞれに対応する複数の列を含む。
【0058】
役割IDの列には、役割を識別するためのIDとして、「a」−「e」が記録されている。たとえば、役割ID「a」は「話しかけやすい警備員」を表す。また、役割IDの列に「a」と記録されている行では、代表移動行動IDの各列には、代表移動行動ID「Ta1」、「Ta2」および「Tan」などが記録され、平均移動速度の列には「700mm/sec」が記録される。したがって、「話しかけやすい警備員」は、約700mm/secの速度で、代表移動行動ID「Ta1」、「Ta2」または「Tan」などによって示される移動軌跡(図9(A),(B)参照)を描くように移動していることが分かる。
【0059】
役割ID「b」は「話しかけにくい警備員」を表す。また、役割IDの列に「b」と記録されている行では、代表移動行動IDの各列には、代表移動行動ID「Tb1」、「Tb2」および「Tbn」などが記録され、平均移動速度の列には「1200mm/sec」が記録される。したがって、「話しかけにくい警備員」は、約1200mm/secの速度で、代表移動行動ID「Tb1」、「Tb2」または「Tbn」などによって示される移動軌跡(図9(C),(D)参照)を描くように移動していることが分かる。
【0060】
また、役割ID「c」は「清掃員」を表し、役割ID「d」は「あまり動かない監視員」を表し、役割ID「d」は「受付係」を表す。また、これらの役割IDが記録される行の代表移動行動IDの列については、役割ID「a」または役割ID「b」が記録される行と略同じ構成であるため、詳細な説明は省略する。そして、平均移動速度の列では、役割ID「c」に対応して「600mm/sec」が記録され、役割ID「d」に対応して「100mm/sec」が記録され、役割ID「e」に対応して「0mm/sec」が記録される。
【0061】
また、図7(B)を参照して、代表移動行動データテーブルは、代表移動行動IDの列および移動行動データの列から構成される。代表移動行動IDの列には、役割テーブルに記録される代表移動行動IDと同じIDが記録される。また、移動行動データの列には、移動軌跡を構成する座標(X,Y)と、その座標で行われた行動(A)とから表される移動行動データが記録される。
【0062】
たとえば、代表移動行動ID「Ta1」に対応して、移動行動データの列には「(Xa1,Ya1,Aa1),(Xa2,Ya2,Aa2),…」が記録される。また、代表移動行動ID「Tb1」に対応して、移動行動データの列には「(Xb1,Yb1,Ab1),(Xb2,Yb2,Ab2),…」が記録される。そして、代表移動行動ID「Tc1」、「Td1」および「Te1」のそれぞれにも、対応する移動行動データが記録される。
【0063】
このようにして、役割データベース20には、役割に対応する移動行動データが記録される。また、代表移動行動データが読み出される場合、役割テーブルが参照された後に、ロボット14に設定された役割に対応する移動行動データが読みされる。
【0064】
なお、これらの5つの役割は、街角で活動する人々を想定して決められたものだが、他の実施例では場所や状況に応じて他の役割が付加されてもよい。たとえば、他の実施例では、数分は一か所で静止し、その後、少し身体の向きを変えたり移動したりする「あまり移動しない警備員」の役割が追加されてもよい。
【0065】
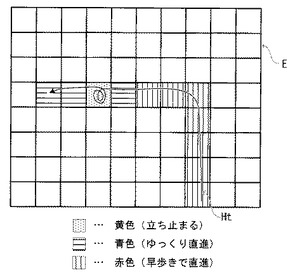
次に、移動行動データに含まれる移動軌跡および行動について説明する。図8を参照して、検出領域Eが25cm四方で空間グリッド化され、その検出領域Eを人間が移動すると、人間の移動軌跡Htが得られる。また、グリッド毎に移動速度が算出され、グリッド毎に行動(A)が求められる。
【0066】
たとえば、或るグリッドにおける移動速度が第1閾値(たとえば、10mm/sec)以下であれば、そのグリッド内の行動は「立ち止まる」となる。また、移動速度が第1閾値よりも大きく第2閾値(800mm/sec)以下であれば、グリッド内の行動は「ゆっくり直進」となる。さらに、移動速度が第2閾値よりも大きければ、グリッド内の移動速度は「早歩きで直進」となる。そして、図8では、行動が「立ち止まる」と判断されたグリッドは黄色(図面では水玉模様)に彩色され、行動が「ゆっくり直進」と判断されたグリッドは青色(図面では横縞模様)に彩色され、行動が「早歩きで直進」と判断されたグリッドは赤色(図面では縦縞模様)に彩色される。なお、本実施例における移動行動とは、上記した行動を伴う移動を意味する。
【0067】
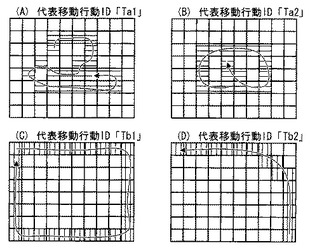
これらのことを踏まえて、「話しかけやすい警備員」および「話しかけにくい警備員」の代表移動行動データについて説明する。まず、図9(A)の代表移動行動ID「Ta1」の移動行動データは、「話しかけやすい警備員」が中央付近をうろうろするように「ゆっくり直進」していることを表す。また、図9(B)の代表移動行動ID「Ta2」の移動行動データは、「話しかけやすい警備員」が空間の中央付近で円を描くように「ゆっくり直進」していることを表す。そして、これらの代表移動行動データから、「話しかけやすい警備員」は目的を持っていないかのように、中央付近をゆっくりと移動していることが分かる。
【0068】
これに対して、図9(C)の代表移動行動ID「Tb1」の移動行動データは、「話しかけにくい警備員」が「早歩きで直進」しながら空間の縁に沿って空間内を一周していることを表す。また、図9(D)の代表移動行動ID「Tb2」の移動行動データは、「話しかけにくい警備員」が空間の右と上の淵を「早歩きで直進」していることを表す。そして、これらの代表移動行動データから、「話しかけにくい警備員」は目的を持っているかのように、素早く移動していることが分かる。
【0069】
そして、本実施例では、ロボット14に役割が設定されると、ロボット14の役割などに基づいて代表移動行動データが選択され、選択された代表移動行動データに基づいてロボット14の移動行動が制御される。
【0070】
まず、代表移動行動データを選択するために、DPマッチングを利用するため、ロボット14の移動軌跡が状態列に変換される。また、役割テーブルにおいて、ロボット14に設定されている役割を示す、代表移動行動IDの行に基づいて、複数の代表移動行動データが読み出され、複数の代表移動行動データのそれぞれに含まれる移動軌跡が状態列に変換される。さらに、ロボット14の状態列と各代表移動行動データの状態列それぞれとの類似度がDPマッチングによって算出される。そして、算出された類似度に基づいて、役割データベース20から代表移動行動データが選択される。なお、DPマッチングを利用して移動軌跡を比較する手法については、非特許文献1で開示されているため、詳細な説明は省略する。
【0071】
このように、ロボット14の移動軌跡を利用して代表移動行動データを選択することができるため、ロボット14の現在位置やそれまでの移動を考慮して、ロボット14の移動行動を決めることができる。
【0072】
また、代表移動行動データが選択されると、ロボット14の現在位置において、複数の将来位置および複数の将来位置における行動が予測される。さらに、予測された行動のそれぞれは発生確率が算出され、算出された各発生確率に基づいて、ロボットの14の移動行動が決められる。そして、中央制御装置10は、このようにして決められた移動行動に対応する動作命令を、ロボット14に付与する。
【0073】
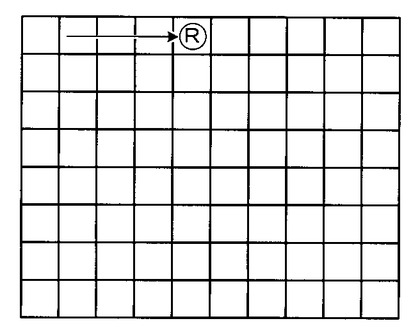
たとえば、図10に示す状態では、ロボット10は左から右への移動軌跡を描きながら移動しており、そのロボット14に「話しかけにくい警備員」が設定されている。この場合、ロボット14の役割および移動軌跡などに基づいて、代表移動行動ID「b」の行が参照され、代表移動行動ID「Tb1」の移動行動データ(図9(C)参照)が選択される。
【0074】
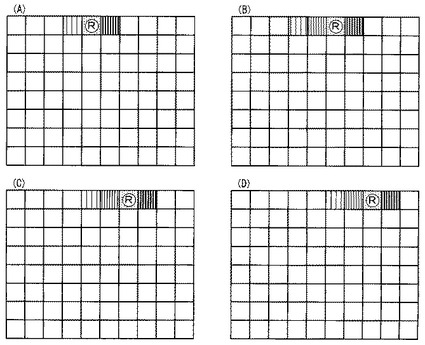
そして、図11(A)を参照して、ロボット14の将来位置および行動として、ロボット14の右のグリッドに「早歩きで直進」、同じグリッドで「立ち止まる」、左のグリッドに「早歩きで直進」が予測される。さらに、予測された行動のそれぞれは発生確率が算出され、ロボット14の移動先は、発生確率が最も高い行動が求められたグリッドに決められる。ここでは、右のグリッドに「早歩きで直進」の発生確率が最も高いため、図11(B)に示すように、ロボット14は「早歩きで直進」して右側のグリッドに移動する。
【0075】
さらに、図11(C),(D)を参照して、移動した先のグリッドにおいても、ロボット14の将来位置および行動は予測され、右へ移動し続ける。つまり、ロボット14は、代表移動行動ID「Tb1」の移動行動データに含まれる移動軌跡と同じように移動する。
【0076】
たとえば、「話しかけやすい警備員」は、検出領域Eの中央付近をうろうろするような振る舞いが多くなる。そのため、ロボット14に「話しかけやすい警備員」の役割が設定されている場合、検出領域Eの中央付近では、うろうろするような移動行動の発生確率が高くなる。一方、検出領域Eの縁などでは、中央付近に移動する移動行動の発生確率が高くなる。また、他の実施例において「あまり移動しない警備員」の役割がロボット14に設定されていれば、数分は静止する移動行動の発生確率が高くなり、数分後には移動に関する移動行動の発生確率が高くなる。
【0077】
このように、役割を持った人間の移動行動データを蓄積することで、データを蓄積した同一の空間では、管理者は、役割を持った人間と同じようにロボット14を動作させることができる。
【0078】
なお、図11(A)−(D)において、グリッドの模様(色)は、発生確率によって濃度が変化する。たとえば、縦縞模様(赤色)または横縞模様(青色)の場合、発生確率が高くなるにつれて縞の密度(色の濃度)が高くなる。また、水玉模様(黄色)の場合、発生確率が高くなるにつれて水玉の密度(色の濃度)が高くなる。また、上記した色の濃度は、他の図面でも同じように表現されることが有る。
【0079】
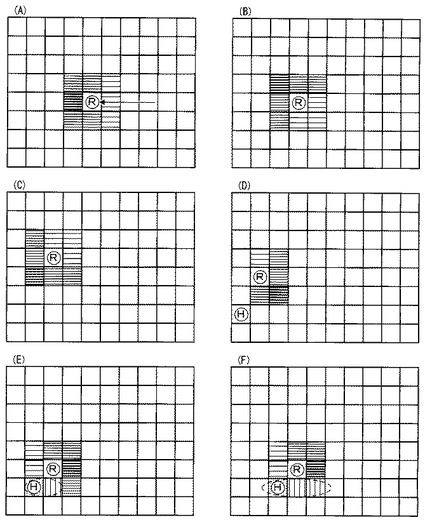
ここで、ロボット14の周囲に人間Hが存在する場合について説明する。まず、図12(A)−図12(C)を参照して、「話しかけやすい警備員」が設定されたロボット14は、代表移動行動ID「Ta1」の移動行動データに含まれる移動軌跡と同じように移動する。また、図12(D)で示される時刻に、検出領域E内で人間Hが検出されると、次の時刻では、その人間Hの将来位置および行動が、ロボット14の将来位置および行動よりも先に予測される。そして、図12(E),(F)を参照して、ロボット14の将来位置および行動は、人間Hの将来位置(点線で囲われた範囲)を除いたグリッドにおいて予測される。つまり、人間が進む位置にはロボット14は進むことができないため、人間の将来位置ではロボット14の将来位置および行動は予測されないように出来る。
【0080】
なお、他の実施例では、検出領域E内で、複数の人間が同時に検出されてもよい。この場合、複数の人間のそれぞれに対して将来位置が予測される。
【0081】
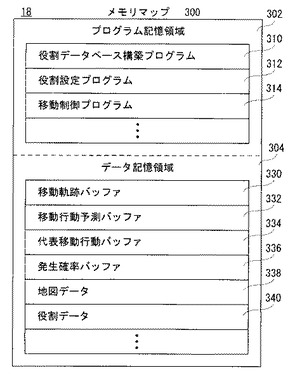
図13は図4に示す中央制御装置10におけるメモリ18のメモリマップ300の一例を示す図解図である。図13が示すように、メモリ18はプログラム記憶領域302およびデータ記憶領域304を含む。プログラム記憶領域302には、中央制御装置10を動作させるためのプログラムとして、役割データベース構築プログラム310、役割設定プログラム312および移動制御プログラム314などが記憶される。
【0082】
役割データベース構築プログラム310は、新しい移動行動データを役割データベース20に追加するためのプログラムである。役割設定プログラム312は、ロボット14に役割を設定するためのプログラムである。移動制御プログラム314は、役割が設定されたロボット14の移動行動を制御するためのプログラムである。
【0083】
なお、図示は省略するが、中央制御装置10を動作させるためのプログラムには、ロボット14との無線通信を確立するためのプログラムなども含まれる。
【0084】
また、データ記憶領域304には、移動軌跡バッファ330、移動行動予測バッファ332、代表移動行動バッファ334および発生確率バッファ336が設けられる。また、データ記憶領域304には、地図データ338および役割データ340が記憶される。
【0085】
移動軌跡バッファ330には、LRF12によって検出された人間およびロボット14の移動軌跡が一時的に記憶される。移動行動予測バッファ332には、ロボット14および人間の予測された複数の将来位置および行動が一時的に記憶される。たとえば、移動行動予測バッファ332には、複数の将来位置を示す座標およびその座標に対応付けられた行動を示す代表移動行動IDが記憶される。代表移動行動バッファ334には、役割データベース20から選択された代表移動行動データが一時的に記憶される。発生確率バッファ336には、移動行動予測バッファ332に格納されている、予測された行動の発生確率が一時的に記憶される。
【0086】
地図データ338は、検出領域Eを示す地図の画像データであり、たとえば図8に示すように空間がグリッドに分けられた地図である。役割データ340は、ロボット14に設定された役割を示すデータである。
【0087】
なお、図示は省略するが、データ記憶領域304には、様々な計算の結果を一時的に格納するバッファなどが設けられると共に、中央制御装置10の動作に必要な他のカウンタやフラグなども設けられる。
【0088】
以下、中央制御装置10のCPU16によって実行されるプログラムについて説明する。図14のフロー図は役割データベース構築プログラム310による処理を示し、図15のフロー図は役割設定プログラム312による処理を示し、図16および図17のフロー図は移動制御プログラム314による処理を示す。
【0089】
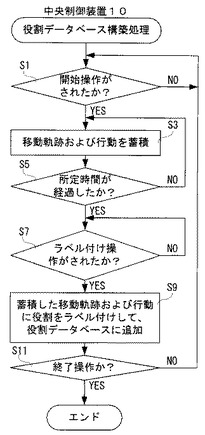
図14は役割データベース構築処理のフロー図である。たとえば、管理者が役割を持つ人間の移動行動データを新たに追加する操作を行うと、中央制御装置10のCPU16は、ステップS1で開始操作がされたか否かを判断する。つまり、人間の移動軌跡および行動の蓄積を開始する操作がされたか否かを判断する。ステップS1で“NO”であれば、つまり開始する操作がされなければ、ステップS1の処理が繰り返し実行される。また、ステップS1で“YES”であれば、つまり開始する操作がされると、ステップS3で移動軌跡および行動を蓄積する。つまり、LRF12によって検出された移動軌跡とその移動軌跡が示す行動とが移動軌跡バッファ330に格納される。
【0090】
続いて、ステップS5では、所定時間(たとえば、60秒)が経過したか否かを判断する。つまり、移動行動を予測するに十分な移動軌跡および行動が蓄積されたか否かを判断する。ステップS5で“NO”であれば、つまり所定時間が経過していなければ、ステップS3に戻る。一方、ステップS5で“YES”であれば、つまり所定時間が経過すれば、ステップS7でラベル付け操作がされたか否かを判断する。たとえば、蓄積した移動軌跡および行動に対して、「話しかけやすい警備員」などのラベルを付ける操作がされたか否かを判断する。ステップS7で“NO”であれば、つまりラベルを付ける操作がされなければステップS7の処理が繰り返し実行される。
【0091】
また、ステップS7で“YES”であれば、つまりラベルを付ける操作がされると、ステップS9で蓄積した移動軌跡および行動に、代表移動行動IDを付けて、役割データベースに追加する。たとえば、「話しかけやすい警備員」のラベルが付ける操作がされると、蓄積した移動軌跡および行動に対して、「話しかけやすい警備員」の代表移動行動IDを付けて、代表移動行動データテーブルに追加する。なお、ステップS9の処理を実行するCPU16は追加手段として機能する。
【0092】
続いて、ステップS11では、終了操作がされたか否かが判断される。つまり、役割データベース構築処理を終了する操作がされた否かを判断する。ステップS11で“NO”であれば、つまり終了操作がされなければ、ステップS1に戻る。一方、ステップS11で“YES”であれば、つまり終了操作がされると、役割データベース構築処理が終了する。
【0093】
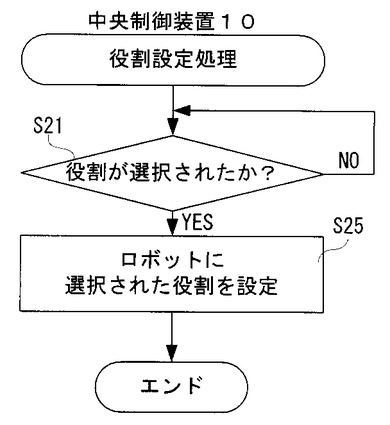
図15は役割設定処理のフロー図である。たとえば、管理者がロボット14に役割を設定するための処理を行うと、CPU16はステップS21で、役割が選択されたか否かを判断する。たとえば、「話しかけやすい警備員」、「話しかけにくい警備員」、「清掃員」、「あまり動かない監視員」および「受付係」の中から1つの役割が選択されたか否かを判断する。ステップS21で“NO”であれば、つまり役割が選択されなければ、ステップS21の処理が繰り返し実行される。また、ステップS21で“YES”であれば、つまり役割が選択されると、ステップS23でロボット14に選択された役割を設定し、役割設定処理を終了する。
【0094】
たとえば、「話しかけやすい警備員」が選択されていた場合、ステップS23では、ロボット14には「話しかけやすい警備員」が設定される。また、設定された役割は、役割データ340としてメモリ18に記憶される。なお、ステップS23の処理を実行するCPU16は、役割手段として機能する。
【0095】
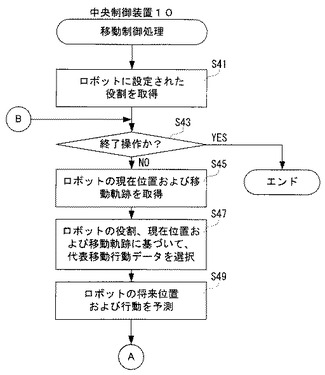
図16および図17は移動制御処理のフロー図である。たとえば、中央制御装置10の電源がオンにされると、CPU16はステップS41で、ロボット14に設定された役割を取得する。つまり、役割データ340からロボット14に設定されている役割が取得される。続いて、ステップS43で終了操作か否かを判断する。つまり、移動制御処理を終了するための操作がされたか否かを判断する。ステップS43で“NO”であれば、終了操作がされなければ、ステップS45でロボットの現在位置および移動軌跡を取得する。つまり、移動軌跡バッファ330に格納されている移動軌跡を読み出し、移動軌跡の最後の位置を現在位置として取得する。なお、ステップS45の処理を実行するCPU16は移動軌跡取得手段として機能する。
【0096】
続いて、ステップS47でロボット14の役割、現在位置および移動軌跡に基づいて、代表移動行動データを選択する。まず、CPU16は、ロボット14の役割を示す役割IDの行から各代表移動行動IDを読み出す。次に、CPU16は、各代表移動行動IDが示す移動行動データに含まれる移動軌跡とロボット14の移動軌跡とを状態列に変換して、DPマッチングによって類似度を算出する。そして、類似度が最も高い代表移動行動データを、役割データベース20の代表移動行動データテーブルから選択する。また、選択された代表移動行動データは、代表移動行動バッファ334に格納される。なお、ステップS47の処理を実行するCPU16は選択手段として機能する。
【0097】
続いて、ステップS49でロボット14の将来位置および行動を予測する。つまり、選択された代表移動行動データに基づいて、次の時刻における複数の将来位置および行動を予測する。なお、ステップS49の処理を実行するCPU16は第1予測手段として機能する。
【0098】
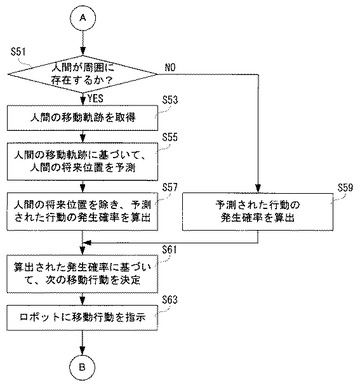
続いて、ステップS51で人間が周囲に存在するか否かを判断する。つまり、検出領域E内で人間が検出されているか否かを判断する。ステップS51で“YES”であれば、つまり検出領域Eに人間が存在していれば、ステップS53で人間の移動軌跡を取得する。つまり、移動軌跡バッファ330から人間の移動軌跡を取得する。続いて、ステップS55で人間の移動軌跡に基づいて人間の将来位置を予測する。つまり、ロボット14の将来位置を予測する場合と同じように、予測用データベース22から人間の移動軌跡と類似する移動軌跡を選択する。そして、選択された移動軌跡に基づいて、次の時刻における人間の将来位置を予測する。なお、ステップS55の処理を実行するCPU16は第2予測手段として機能する。
【0099】
続いて、ステップS57では、人間の将来位置を除き、予測された行動の発生確率を算出する。たとえば、図12(E)のように、人間の将来位置を除いて、ロボット14の各将来位置において、ロボット14の行動の発生確率が算出される。そして、算出された発生確率は、将来位置を示す座標と対応付けられて発生確率バッファ336に格納される。
【0100】
また、周囲に人間がいなければ、ステップS51で“NO”と判断され、ステップS59で予測された行動の発生確率が算出される。たとえば、図11(A)に示すように、ロボット14の将来位置において行動の発生確率が算出される。
【0101】
なお、ステップS57またはステップS59の処理を実行するCPU16は算出手段として機能する。
【0102】
続いて、ステップS61では、算出された発生確率に基づいて、次の移動行動を決定する。たとえば、図11(A)のように発生確率が算出された場合、ロボット14の右側のグリッドにおける行動の発生確率が最も高いため、「右側のグリッドへ早歩きで直進する」という移動行動がステップS61の処理によって決められる。続いて、ステップS63では、ロボット14に移動行動を指示して、ステップS43に戻る。つまり、ステップS61で決められた移動行動の動作命令が、ロボット14に付与される。
【0103】
なお、ステップS43で“YES”であれば、つまり終了操作がされると、移動制御処理が終了する。
【0104】
以上のことから、移動制御システム100は、役割データベース20を備える中央制御装置10および役割が設定されたロボット14を有する。また、役割データベース20は、役割を持った人間の代表移動行動データから構成される。たとえば、ロボット14に「話しかけやすい警備員」の役割が設定されている場合、「話しかけやすい警備員」の代表移動行動データが役割データベース20から選択される。また、中央制御装置10では、役割が設定されたロボット14の複数の将来位置および各将来位置における行動が代表移動行動データに基づいて予測され、予測された複数の行動のそれぞれの発生確率が算出される。そして、ロボット14には、算出された発生確率に基づいて移動行動が指示される。
【0105】
したがって、ロボット14と同じ役割を持った人間の移動行動データに基づいて、ロボット14の移動行動が決まる。そのため、システムの管理者は、役割が設定されたロボットを、同じ役割を持った人間と同じように動作させることができる。
【0106】
なお、ロボット14が移動しておらず、移動軌跡が存在しない場合、DPマッチングを利用せずに、ロボット14の現在位置に近い座標を含む代表移動行動データが選択される。また、他の実施例では、DPマッチングとは異なる手法を利用して、代表移動行動が選択されてもよい。
【0107】
また、本実施例では、最も発生確率が高い行動が選択されたが、他の実施例では発生確率が80%を超える上位3つの行動からランダムに選択されてもよい。
【0108】
また、他の実施例では、「立ち止まってから、身体の向きを変える」や「後進する」などの行動が移動軌跡から検出されてもよい。
【0109】
また、人間の位置を検出するためにLRF12を用いたが、LRF12に代えて超音波距離センサやミリ波レーダなどを用いて、人間の位置が検出されてもよい。さらに、人間が所持する携帯通信端末の電波強度を利用して、人間の位置および移動軌跡が検出されてもよい。
【0110】
また、本実施例では、役割データベースを構成する代表移動行動は管理者の操作によって追加されているが、他の実施例では移動行動データが自動的に追加されてもよい。たとえば、人間の移動速度、行動範囲および移動軌跡の形状が所定条件を満たす場合に、その人間の移動行動データが役割データベース20に追加される。この場合、役割を持った人間の移動軌跡は携帯通信端末の電波強度を利用して検出し、その他の人間の移動軌跡はLRF12によって検出されてもよい。
【0111】
また、他の実施例では、複数の役割データベース20を用意しておき、季節、イベントおよび時間帯などによって使い分けてもよい。
【0112】
また、「機能的に同じ場所」であれば、役割データベースを構成した場所とは異なる場所で、その役割データベース20を利用してロボットの移動制御システム100を動作させてもよい。そして、「機能的に同じ場所」とは、空間の面積、空間の形、利用目的および内部と外部とに設置される設備などが同じ場所のことを表す。たとえば、幅および長さが略同じであり、内部と外部とに何も設備が設置されていない、2つの廊下は「機能的に同じ場所」と言うことができる。
【0113】
また、役割データベース構築プログラム310、役割設定プログラム312および移動制御プログラム314は、データ配信用のサーバのHDDに記憶され、ネットワークを介して本実施例と同等の構成のシステムにおける中央制御装置などに配信されてもよい。また、CD, DVD, BD (Blu-ray Disc)などの光学ディスク、USBメモリおよびメモリカードなどの記憶媒体にこれらのプログラムを記憶させた状態で、その記憶媒体が販売または配布されてもよい。そして、上記したサーバや記憶媒体などを通じてダウンロードされた、役割データベース構築プログラム310、役割設定プログラム312および移動制御プログラム314が、本実施例と同等の構成のシステムにおける中央制御装置にインストールされた場合、本実施例と同等の効果が得られる。
【0114】
そして、本明細書中で挙げた、自由度、距離、一定期間、半径、角度、周波数、平均移動速度、第1閾値、第2閾値および所定時間などの具体的な数値は、いずれも単なる一例であり、製品の仕様などの必要に応じて適宜変更可能である。
【符号の説明】
【0115】
10 …中央制御装置
12a−12f …LRF
14 …ロボット
16 …CPU
18 …メモリ
20 …役割データベース
100 …移動制御システム
200 …ネットワーク
【技術分野】
【0001】
この発明は、ロボットの移動制御システム、ロボットの移動制御プログラムおよびロボットの移動制御方法に関し、特にたとえば、ロボットの移動行動を決定する、ロボットの移動制御システム、ロボットの移動制御プログラムおよびロボットの移動制御方法に関する。
【背景技術】
【0002】
非特許文献1に開示されている、環境情報構造化システムは、大量に蓄積された人々の行動から、環境の意味や行動を理解し、人々の大局行動を予測する。そして、予測された結果を利用して、ロボットは、特定の大局行動を行う人間に対して、サービスを提供することができる。
【非特許文献1】Takayuki Kanda, Dylan F. Glas, Masahiro Shiomi, Hiroshi Ishiguro and Norihiro Hagita, Who will be the customer?: A social robot that anticipates people’s behavior from their trajectories, Tenth International Conference on Ubiquitous Computing (UbiComp 2008), pp.380-389, 2008
【発明の概要】
【発明が解決しようとする課題】
【0003】
ところが、大量に蓄積された人々の行動を利用して、ロボットの移動行動を決定するようなシステムは存在しなかった。
【0004】
それゆえに、この発明の主たる目的は、新規な、ロボットの移動制御システム、ロボットの移動制御プログラムおよびロボットの移動制御方法を提供することである。
【0005】
この発明の他の目的は、役割が設定されたロボットの移動行動を決定することができる、ロボットの移動制御システム、ロボットの移動制御プログラムおよびロボットの移動制御方法を提供することである。
【課題を解決するための手段】
【0006】
この発明は、上記の課題を解決するために、以下の構成を採用した。なお、括弧内の参照符号および補足説明等は、この発明の理解を助けるために記述する実施形態との対応関係を示したものであって、この発明を何ら限定するものではない。
【0007】
第1の発明は、役割を持った複数の人間の移動行動データから構成されるデータベースおよび役割が設定されるロボットを含む、ロボットの移動制御システムであって、ロボットに設定された役割に基づいてデータベースから移動行動データを選択する選択手段、選択手段によって選択された移動行動データからロボットの複数の移動行動を予測する第1予測手段、第1予測手段によって予測された複数の移動行動のそれぞれの発生確率を算出する算出手段、および算出手段によって算出された複数の発生確率に基づいて、ロボットに移動行動を指示する指示手段を備える、ロボットの移動制御システムである。
【0008】
第1の発明では、移動制御システム(100:実施例において対応する部分を例示する参照符号。以下、同じ。)は、複数の移動行動データから構成されるデータベース(20)およびロボット(14)を含む。また、移動行動データは役割を持った人間の移動軌跡および行動を含み、ロボットには人間が持つ役割が設定される。たとえば、ロボットに「話しかけやすい警備員」の役割が設定されていれば、選択手段(16,S47)は、「話しかけやすい警備員」の移動行動データがデータベースから選択される。第1予測手段(16,S49)は、役割が設定されたロボットの複数の移動行動を、選択された移動行動データに基づいて予測する。算出手段(16,S57,S59)は、予測された複数の移動行動のそれぞれの発生確率を算出する。そして、指示手段(16,S61,S63)は、たとえば、算出された発生確率が最も高い移動行動を、ロボットに指示する。
【0009】
第1の発明によれば、ロボットと同じ役割を持った人間の移動行動データに基づいて、ロボットの移動行動を決定することができる。そのため、役割が設定されたロボットを、同じ役割を持った人間と同じように動作させることができる。
【0010】
第2の発明は、第1の発明に従属し、ロボットの移動軌跡を取得する移動軌跡取得手段をさらに備え、選択手段は、移動軌跡取得手段によって取得された移動軌跡、ロボットに設定された役割および各移動行動データに含まれる移動軌跡に基づいて、データベースから移動行動データを選択する。
【0011】
第2の発明では、移動軌跡取得手段(16,S45)は、たとえば、LRF(12)によって連続して取得されたロボットの現在位置を、ロボットの移動軌跡として取得する。そして、ロボットの移動軌跡役割および各移動行動データに含まれる移動軌跡に基づいて、データベースから移動行動データが選択される。
【0012】
第2の発明によれば、ロボットの現在位置やそれまでの移動を考慮して、ロボットの移動行動を決めることができる。
【0013】
第3の発明は、第1の発明または第2の発明に従属し、第1予測手段によって予測された移動行動は、ロボットの将来位置を含み、ロボットの周囲に人間が存在するとき、人間の将来位置を予測する第2予測手段をさらに備え、算出手段は、第2予測手段によって予測された人間の将来位置を除いたロボットの将来位置に基づいて、複数の移動行動の発生確率を算出する。
【0014】
第3の発明では、第1予測手段は、ロボットの移動行動として、ロボットの将来位置も予測する。第2予測手段(16,S55)は、たとえばロボットと人間とが同じ領域(E)に存在する場合、人間の将来位置を予測する。また、第2予測手段は、役割に関係なく蓄積された移動行動データに基づいて人間の将来位置を予測する。そして、算出手段は、予測された人間の将来位置が除かれたロボットの将来位置に基づいて、複数の移動行動の発生確率を算出する。
【0015】
第3の発明によれば、人間が居る位置にはロボットは進むことができないため、人間の将来位置ではロボットの移動行動が予測されないようにできる。
【0016】
第4の発明は、中央制御装置(10)、役割を持った複数の人間の移動行動データから構成されるデータベース(20)および役割が設定されるロボット(14)を含む、ロボットの移動制御システム(100)であって、中央制御装置のプロセッサ(16)を、ロボットに設定された役割に基づいてデータベースから移動行動データを選択する選択手段(S47)、選択手段によって選択された移動行動データからロボットの複数の移動行動を予測する予測手段(S49)、予測手段によって予測された複数の移動行動のそれぞれの発生確率を算出する算出手段(S57,S59)、および算出手段によって算出された複数の発生確率に基づいて、ロボットに移動行動を指示する指示手段(S61,S63)として機能させる、ロボットの移動制御プログラムである。
【0017】
第4の発明でも、第1の発明と同様、ロボットと同じ役割を持った人間の移動行動データに基づいて、ロボットの移動行動を決定することができる。そのため、役割が設定されたロボットを、同じ役割を持った人間と同じように動作させることができる。
【0018】
第5の発明は、役割を持った複数の人間の移動行動データから構成されるデータベース(20)および役割が設定されるロボット(14)を含む、ロボットの移動制御システム(100)のロボットの移動制御方法であって、ロボットに設定された役割に基づいてデータベースから移動行動データを選択し(S47)、選択された移動行動データからロボットの複数の移動行動を予測し(S49)、予測された複数の移動行動のそれぞれの発生確率を算出し(S57,S59)、そして算出された複数の発生確率に基づいて、ロボットに移動行動を指示する(S61,S63)、ロボットの移動制御方法である。
【0019】
第5の発明でも、第1の発明と同様、ロボットと同じ役割を持った人間の移動行動データに基づいて、ロボットの移動行動を決定することができる。そのため、役割が設定されたロボットを、同じ役割を持った人間と同じように動作させることができる。
【発明の効果】
【0020】
この発明によれば、ロボットと同じ役割を持った人間の移動行動データに基づいて、ロボットの移動行動が決まる。そのため、システムの管理者は、役割が設定されたロボットを、同じ役割を持った人間と同じように動作させることができる。
【0021】
この発明の上述の目的、その他の目的、特徴および利点は、図面を参照して行う以下の実施例の詳細な説明から一層明らかとなろう。
【図面の簡単な説明】
【0022】
【図1】図1はこの発明の一実施例のロボットの移動制御システムの概要を示す図解図である。
【図2】図2は図1に示すロボットの外観を正面から見た図解図である。
【図3】図3は図1に示すロボットの電気的な構成を示すブロック図である。
【図4】図4は図1に示す中央制御装置の電気的な構成を示すブロック図である。
【図5】図5は図1および図4に示すLRFの計測領域を示す図解図である。
【図6】図6は図1および図4に示すLRFを利用して検出された移動軌跡の一例を示す図解図である。
【図7】図7は図4に示す役割データベースに含まれるテーブルの一例を示す図解図である。
【図8】図8は図1に示す中央制御措置によって検出された移動行動データの一例を示す図解図である。
【図9】図9は図4に示す役割データベースに含まれる代表移動行動データの一例を示す図解図である。
【図10】図10は図1に示すロボットが移動している様子の一例を示す図解図である。
【図11】図11は図1に示すロボットの移動が制御されている様子の一例を示す図解図である。
【図12】図12は図1に示すロボットの移動が制御されている様子の他の一例を示す図解図である。
【図13】図13は図4に示すメモリのメモリマップの一例を示す図解図である。
【図14】図14は図4に示すCPUの役割データベース構築処理を示すフロー図である。
【図15】図15は図4に示すCPUの役割設定処理を示すフロー図である。
【図16】図16は図4に示すCPUの移動制御処理の一部を示すフロー図である。
【図17】図17は図4に示すCPUの移動制御処理の一部であって、図16に後続するフロー図である。
【発明を実施するための形態】
【0023】
図1を参照して、この実施例のロボットの移動制御システム100は、LRF12a,12bを含む数台のLRFを有する中央制御装置10および自律移動ロボット(以下、単に「ロボット」と言う。)14を備える。LRF12a,12bは、人間が任意に移動することができる場所(環境)に設置される。なお、人間が任意に行動する場所は、会社のフロア、博物館、ショッピングモールまたはアトラクション会場などであり、LRF12a,12bは様々な場所に設置される。
【0024】
中央制御装置10は、LRF12a,12bによって、任意に移動する人間の移動軌跡を検出する。また、中央制御装置10は、LRF12a,12bなどによって取得された移動軌跡およびその移動軌跡が示す移動態様(行動)から構成される移動行動データを、データベースに蓄積する。さらに、中央制御装置10は、ネットワーク200を介して、ロボット14に役割を設定したり、役割に応じた移動行動の動作命令をロボット14に付与したりする。なお、移動態様、つまり行動は、後述する空間グリッド内における移動速度に基づいて求めることができる。
【0025】
ロボット14は、システムの管理者によって役割が設定され、中央制御装置10が付与する動作命令に基づいて動作する。また、ロボット14は、相互作用指向のロボット(コミュニケーションロボット)でもあり、人間のようなコミュニケーションの対象(コミュニケーション対象)との間で、身振り手振りのような身体動作および音声の少なくとも一方を含むコミュニケーション行動を実行する機能を備えている。
【0026】
なお、図1では簡単のため人間は1人しか示していないが、中央制御装置10は2人以上の位置を同時に検出することができる。さらに、ロボット14も同様に1台しか示していないが、中央制御装置10は2台以上のロボット14を同時に管理することができる。
【0027】
図2はこの実施例のロボット14の外観を示す正面図である。図2を参照して、ロボット14は台車30を含み、台車30の下面にはロボット14を自律移動させる2つの車輪32および1つの従輪34が設けられる。2つの車輪32は車輪モータ36(図3参照)によってそれぞれ独立に駆動され、台車30すなわちロボット14を前後左右の任意方向に動かすことができる。また、従輪34は車輪32を補助する補助輪である。したがって、ロボット14は、配置された空間内を自律制御によって移動可能である。
【0028】
台車30の上には、円柱形のセンサ取り付けパネル38が設けられ、このセンサ取り付けパネル38には、多数の赤外線距離センサ40が取り付けられる。これらの赤外線距離センサ40は、センサ取り付けパネル38すなわちロボット14の周囲の物体(人間や障害物など)との距離を測定するものである。
【0029】
なお、この実施例では、距離センサとして、赤外線距離センサを用いるようにしてあるが、赤外線距離センサに代えて、小型のLRFや、超音波距離センサおよびミリ波レーダなどを用いることもできる。
【0030】
センサ取り付けパネル38の上には、胴体42が直立するように設けられる。また、胴体42の前方中央上部(人の胸に相当する位置)には、上述した赤外線距離センサ40がさらに設けられ、ロボット14の前方の主として人間との距離を計測する。また、胴体42には、その側面側上端部のほぼ中央から伸びる支柱44が設けられ、支柱44の上には、全方位カメラ46が設けられる。全方位カメラ46は、ロボット14の周囲を撮影するものであり、後述する眼カメラ70とは区別される。この全方位カメラ46としては、たとえばCCDやCMOSのような固体撮像素子を用いるカメラを採用することができる。なお、これら赤外線距離センサ40および全方位カメラ46の設置位置は、当該部位に限定されず適宜変更され得る。
【0031】
胴体42の両側面上端部(人の肩に相当する位置)には、それぞれ、肩関節48Rおよび肩関節48Lによって、上腕50Rおよび上腕50Lが設けられる。図示は省略するが、肩関節48Rおよび肩関節48Lは、それぞれ、直交する3軸の自由度を有する。すなわち、肩関節48Rは、直交する3軸のそれぞれの軸廻りにおいて上腕50Rの角度を制御できる。肩関節48Rの或る軸(ヨー軸)は、上腕50Rの長手方向(または軸)に平行な軸であり、他の2軸(ピッチ軸およびロール軸)は、その軸にそれぞれ異なる方向から直交する軸である。同様にして、肩関節48Lは、直交する3軸のそれぞれの軸廻りにおいて上腕50Lの角度を制御できる。肩関節48Lの或る軸(ヨー軸)は、上腕50Lの長手方向(または軸)に平行な軸であり、他の2軸(ピッチ軸およびロール軸)は、その軸にそれぞれ異なる方向から直交する軸である。
【0032】
また、上腕50Rおよび上腕50Lのそれぞれの先端には、肘関節52Rおよび肘関節52Lが設けられる。図示は省略するが、肘関節52Rおよび肘関節52Lは、それぞれ1軸の自由度を有し、この軸(ピッチ軸)の軸回りにおいて前腕54Rおよび前腕54Lの角度を制御できる。
【0033】
前腕54Rおよび前腕54Lのそれぞれの先端には、人の手に相当する球体56Rおよび球体56Lがそれぞれ固定的に設けられる。ただし、指や掌の機能が必要な場合には、人間の手の形をした「手」を用いることも可能である。また、図示は省略するが、台車30の前面、肩関節48Rと肩関節48Lとを含む肩に相当する部位、上腕50R、上腕50L、前腕54R、前腕54L、球体56Rおよび球体56Lには、それぞれ、接触センサ58(図3で包括的に示す)が設けられる。台車30の前面の接触センサ58は、台車30への人間や他の障害物の接触を検知する。したがって、ロボット14は、自身の移動中に障害物との接触が有ると、それを検知し、直ちに車輪32の駆動を停止してロボット14の移動を急停止させることができる。また、その他の接触センサ58は、当該各部位に触れたかどうかを検知する。なお、接触センサ58の設置位置は、当該部位に限定されず、適宜な位置(人の胸、腹、脇、背中および腰に相当する位置)に設けられてもよい。
【0034】
胴体42の中央上部(人の首に相当する位置)には首関節60が設けられ、さらにその上には頭部62が設けられる。図示は省略するが、首関節60は、3軸の自由度を有し、3軸の各軸廻りに角度制御可能である。或る軸(ヨー軸)はロボット14の真上(鉛直上向き)に向かう軸であり、他の2軸(ピッチ軸、ロール軸)は、それぞれ、それと異なる方向で直交する軸である。
【0035】
頭部62には、人の口に相当する位置に、スピーカ64が設けられる。スピーカ64は、ロボット14が、それの周辺の人間に対して音声ないし音によってコミュニケーションを取るために用いられる。また、人の耳に相当する位置には、マイク66Rおよびマイク66Lが設けられる。以下、右のマイク66Rと左のマイク66Lとをまとめてマイク66と言うことがある。マイク66は、周囲の音、とりわけコミュニケーションを実行する対象である人間の音声を取り込む。さらに、人の目に相当する位置には、眼球部68Rおよび眼球部68Lが設けられる。眼球部68Rおよび眼球部68Lは、それぞれ眼カメラ70Rおよび眼カメラ70Lを含む。以下、右の眼球部68Rと左の眼球部68Lとをまとめて眼球部68と言うことがある。また、右の眼カメラ70Rと左の眼カメラ70Lとをまとめて眼カメラ70と言うことがある。
【0036】
眼カメラ70は、ロボット14に接近した人間の顔や他の部分ないし物体などを撮影して、それに対応する映像信号を取り込む。また、眼カメラ70は、上述した全方位カメラ46と同様のカメラを用いることができる。たとえば、眼カメラ70は、眼球部68内に固定され、眼球部68は、眼球支持部(図示せず)を介して頭部62内の所定位置に取り付けられる。図示は省略するが、眼球支持部は、2軸の自由度を有し、それらの各軸廻りに角度制御可能である。たとえば、この2軸の一方は、頭部62の上に向かう方向の軸(ヨー軸)であり、他方は、一方の軸に直交しかつ頭部62の正面側(顔)が向く方向に直行する方向の軸(ピッチ軸)である。眼球支持部がこの2軸の各軸廻りに回転されることによって、眼球部68ないし眼カメラ70の先端(正面)側が変位され、カメラ軸すなわち視線方向が移動される。なお、上述のスピーカ64、マイク66および眼カメラ70の設置位置は、当該部位に限定されず、適宜な位置に設けられてよい。
【0037】
このように、この実施例のロボット14は、車輪32の独立2軸駆動、肩関節48の3自由度(左右で6自由度)、肘関節52の1自由度(左右で2自由度)、首関節60の3自由度および眼球支持部の2自由度(左右で4自由度)の合計17自由度を有する。
【0038】
図3はロボット14の電気的な構成を示すブロック図である。この図3を参照して、ロボット14は、CPU80を含む。CPU80は、マイクロコンピュータ或いはプロセッサとも呼ばれ、バス82を介して、メモリ84、モータ制御ボード86、センサ入力/出力ボード88および音声入力/出力ボード90に接続される。
【0039】
メモリ84は、図示は省略をするが、ROMおよびRAMを含む。ROMには、ロボット14の動作を制御するための制御プログラムが予め記憶される。たとえば、各センサの出力(センサ情報)を検知するための検知プログラムや、外部コンピュータ(中央制御装置10)との間で必要なデータやコマンドを送受信するための通信プログラムなどが記録される。また、RAMは、CPU80のワークメモリやバッファメモリとして用いられる。
【0040】
モータ制御ボード86は、たとえばDSPで構成され、各腕や首関節および眼球部などの各軸モータの駆動を制御する。すなわち、モータ制御ボード86は、CPU80からの制御データを受け、右眼球部68Rの2軸のそれぞれの角度を制御する2つのモータ(図3では、まとめて「右眼球モータ92」と示す)の回転角度を制御する。同様に、モータ制御ボード86は、CPU80からの制御データを受け、左眼球部68Lの2軸のそれぞれの角度を制御する2つのモータ(図3では、まとめて「左眼球モータ94」と示す)の回転角度を制御する。
【0041】
また、モータ制御ボード86は、CPU80からの制御データを受け、肩関節48Rの直交する3軸のそれぞれの角度を制御する3つのモータと肘関節52Rの角度を制御する1つのモータとの計4つのモータ(図3では、まとめて「右腕モータ96」と示す)の回転角度を制御する。同様に、モータ制御ボード86は、CPU80からの制御データを受け、肩関節48Lの直交する3軸のそれぞれの角度を制御する3つのモータと肘関節52Lの角度を制御する1つのモータとの計4つのモータ(図3では、まとめて「左腕モータ98」と示す)の回転角度を制御する。
【0042】
さらに、モータ制御ボード86は、CPU80からの制御データを受け、首関節60の直交する3軸のそれぞれの角度を制御する3つのモータ(図3では、まとめて「頭部モータ110」と示す)の回転角度を制御する。そして、モータ制御ボード86は、CPU80からの制御データを受け、車輪32を駆動する2つのモータ(図3では、まとめて「車輪モータ36」と示す)の回転角度を制御する。なお、この実施例では、車輪モータ36を除くモータは、制御を簡素化するためにステッピングモータ(すなわち、パルスモータ)を用いる。ただし、車輪モータ36と同様に直流モータを用いるようにしてもよい。また、ロボット14の身体部位を駆動するアクチュエータは、電流を動力源とするモータに限らず適宜変更されてもよい。たとえば、他の実施例では、エアアクチュエータなどが適用されてもよい。
【0043】
センサ入力/出力ボード88は、モータ制御ボード86と同様に、DSPで構成され、各センサからの信号を取り込んでCPU80に与える。すなわち、赤外線距離センサ40のそれぞれからの反射時間に関するデータがこのセンサ入力/出力ボード88を通じてCPU80に入力される。また、全方位カメラ46からの映像信号が、必要に応じてセンサ入力/出力ボード88で所定の処理を施してからCPU80に入力される。眼カメラ70からの映像信号も、同様に、CPU80に入力される。また、上述した複数の接触センサ58(図3では、まとめて「接触センサ58」と示す)からの信号がセンサ入力/出力ボード88を介してCPU80に与えられる。音声入力/出力ボード90もまた、同様に、DSPで構成され、CPU80から与えられる音声合成データに従った音声または声がスピーカ64から出力される。また、マイク66からの音声入力が、音声入力/出力ボード90を介してCPU80に与えられる。
【0044】
また、CPU80は、バス82を介して通信LANボード112に接続される。通信LANボード112は、たとえばDSPで構成され、CPU80から与えられた送信データを無線通信装置114に与え、無線通信装置114は送信データを、ネットワーク200を介して外部コンピュータ(中央制御装置10)に送信する。また、通信LANボード112は、無線通信装置114を介してデータを受信し、受信したデータをCPU80に与える。たとえば、送信データとしては、全方位カメラ46および目カメラ70によって撮影された周囲の映像データであったりする。
【0045】
図4は中央制御装置10の電気的な構成を示すブロック図である。図4を参照して、中央制御装置10は、LRF12a−12fおよびCPU16などを含む。CPU16は、マイクロコンピュータ或いはプロセッサとも呼ばれる。また、CPU16には、先述したLRF12aおよびLRF12bに加えて、LRF12c,LRF12d,LRF12eおよびLRF12fも接続される。さらに、CPU16には、メモリ18、役割データベース20、予測用データベース22および通信LANボード24も接続される。
【0046】
なお、LRF12a−12fを区別する必要がない場合には、まとめて「LRF12」と言う。
【0047】
LRF12は、レーザーを照射し、物体(人間も含む)に反射して戻ってくるまでの時間から当該物体までの距離を計測するものである。たとえば、トランスミッタ(図示せず)から照射したレーザーを回転ミラー(図示せず)で反射させて、前方を扇状に一定角度(たとえば、0.5度)ずつスキャンする。ここで、LRF12としては、SICK社製のレーザーレンジファインダ(型式 LMS200)を用いることができる。このレーザーレンジファインダを用いた場合には、距離8mを±15mm程度の誤差で計測可能である。
【0048】
メモリ18は、図示は省略をするが、ROM,HDDおよびRAMを含み、ROMおよびHDDには、中央制御装置10の動作を制御するための制御プログラムが予め記憶される。たとえば、LRF12による人間の検出に必要なプログラムなどが記録される。また、RAMは、CPU16のワークメモリやバッファメモリとして用いられる。
【0049】
役割データベース20は、役割を持つ複数の人間の移動行動データから構成されるデータベースである。また、予測用データベース22は、人間の役割に関係なく、移動行動データが一定期間(たとえば、1週間)蓄積されたデータベースである。そして、本実施例では、役割データベース20を利用してロボット14の移動が制御され、予測用データベース22を利用して空間に存在する人間の将来位置などが予測される。
【0050】
通信LANボード24は、たとえばDSPで構成され、CPU16から与えられた送信データを無線通信装置26に与え、無線通信装置24は送信データを、ネットワーク200を介してロボット14に送信する。たとえば、送信データとしては、ロボット14に指示する動作命令の信号(コマンド)であったりする。また、通信LANボード24は、無線通信装置26を介してデータを受信し、受信したデータをCPU16に与える。
【0051】
次に、LRF12について詳細に説明する。図5を参照して、LRF12の計測範囲は、半径r(r≒8m)の半円形状(扇形)で示される。つまり、LRF12は、その正面方向を中心とした場合に、左右90度の方向を所定の距離(r)以内で計測可能である。
【0052】
また、使用しているレーザーは、日本工業規格 JIS C 6802「レーザー製品の安全基準」におけるクラス1レーザーであり、人の眼に対して影響を及ぼさない安全なレベルである。また、この実施例では、LRF12のサンプリングレートを37Hzとした。これは、歩行するなどにより移動する人間の位置を連続して検出するためである。
【0053】
さらに、LRF12の各々は、検出領域が重なるように配置され、図示は省略するが、床面から約90cmの高さに固定される。この高さは、被験者の胴体と腕(両腕)とを検出可能とするためであり、たとえば、日本人の成人の平均身長から算出される。したがって、中央制御装置10を設ける場所(地域ないし国)や被験者の年齢ないし年代(たとえば、子供,大人)に応じて、LRF12を固定する高さを適宜変更するようにしてよい。なお、本実施例では、設定されるLRF12は6台としたが、2台以上であれば、任意の台数のLRF12が設置されてもよい。
【0054】
このような構成の中央制御装置10では、CPU16がLRF12からの出力(距離データ)に基づいて、パーティクルフィルタを用いて、人間の現在位置の変化を推定する。そして、推定された現在位置の変化は移動軌跡として記録される。
【0055】
たとえば、図6を参照して、LRF12a,12bは互いに向い合せに設置され、LRF12a,12bの計測範囲が重なる範囲は斜線が付されて示される。斜線が付された範囲は検出領域Eとされ、この検出領域E内では人間の現在位置が連続的に検出される。そして、連続的に検出された現在位置の変化が移動軌跡tとなる。なお、検出領域E内は、X−Y座標が設定され、人間の位置は(X,Y)の座標で示すことができる。
【0056】
役割データベース20について詳細に説明する。役割データベース20は、図7(A)に示す役割テーブルと、図7(B)に示す代表移動行動データテーブルとを含む。
【0057】
図7(A)を参照して、役割テーブルは、役割ID、代表移動行動IDおよび平均移動速度の列から構成される。また、代表移動行動IDの列は、n(nは自然数)個の代表移動行動IDのそれぞれに対応する複数の列を含む。
【0058】
役割IDの列には、役割を識別するためのIDとして、「a」−「e」が記録されている。たとえば、役割ID「a」は「話しかけやすい警備員」を表す。また、役割IDの列に「a」と記録されている行では、代表移動行動IDの各列には、代表移動行動ID「Ta1」、「Ta2」および「Tan」などが記録され、平均移動速度の列には「700mm/sec」が記録される。したがって、「話しかけやすい警備員」は、約700mm/secの速度で、代表移動行動ID「Ta1」、「Ta2」または「Tan」などによって示される移動軌跡(図9(A),(B)参照)を描くように移動していることが分かる。
【0059】
役割ID「b」は「話しかけにくい警備員」を表す。また、役割IDの列に「b」と記録されている行では、代表移動行動IDの各列には、代表移動行動ID「Tb1」、「Tb2」および「Tbn」などが記録され、平均移動速度の列には「1200mm/sec」が記録される。したがって、「話しかけにくい警備員」は、約1200mm/secの速度で、代表移動行動ID「Tb1」、「Tb2」または「Tbn」などによって示される移動軌跡(図9(C),(D)参照)を描くように移動していることが分かる。
【0060】
また、役割ID「c」は「清掃員」を表し、役割ID「d」は「あまり動かない監視員」を表し、役割ID「d」は「受付係」を表す。また、これらの役割IDが記録される行の代表移動行動IDの列については、役割ID「a」または役割ID「b」が記録される行と略同じ構成であるため、詳細な説明は省略する。そして、平均移動速度の列では、役割ID「c」に対応して「600mm/sec」が記録され、役割ID「d」に対応して「100mm/sec」が記録され、役割ID「e」に対応して「0mm/sec」が記録される。
【0061】
また、図7(B)を参照して、代表移動行動データテーブルは、代表移動行動IDの列および移動行動データの列から構成される。代表移動行動IDの列には、役割テーブルに記録される代表移動行動IDと同じIDが記録される。また、移動行動データの列には、移動軌跡を構成する座標(X,Y)と、その座標で行われた行動(A)とから表される移動行動データが記録される。
【0062】
たとえば、代表移動行動ID「Ta1」に対応して、移動行動データの列には「(Xa1,Ya1,Aa1),(Xa2,Ya2,Aa2),…」が記録される。また、代表移動行動ID「Tb1」に対応して、移動行動データの列には「(Xb1,Yb1,Ab1),(Xb2,Yb2,Ab2),…」が記録される。そして、代表移動行動ID「Tc1」、「Td1」および「Te1」のそれぞれにも、対応する移動行動データが記録される。
【0063】
このようにして、役割データベース20には、役割に対応する移動行動データが記録される。また、代表移動行動データが読み出される場合、役割テーブルが参照された後に、ロボット14に設定された役割に対応する移動行動データが読みされる。
【0064】
なお、これらの5つの役割は、街角で活動する人々を想定して決められたものだが、他の実施例では場所や状況に応じて他の役割が付加されてもよい。たとえば、他の実施例では、数分は一か所で静止し、その後、少し身体の向きを変えたり移動したりする「あまり移動しない警備員」の役割が追加されてもよい。
【0065】
次に、移動行動データに含まれる移動軌跡および行動について説明する。図8を参照して、検出領域Eが25cm四方で空間グリッド化され、その検出領域Eを人間が移動すると、人間の移動軌跡Htが得られる。また、グリッド毎に移動速度が算出され、グリッド毎に行動(A)が求められる。
【0066】
たとえば、或るグリッドにおける移動速度が第1閾値(たとえば、10mm/sec)以下であれば、そのグリッド内の行動は「立ち止まる」となる。また、移動速度が第1閾値よりも大きく第2閾値(800mm/sec)以下であれば、グリッド内の行動は「ゆっくり直進」となる。さらに、移動速度が第2閾値よりも大きければ、グリッド内の移動速度は「早歩きで直進」となる。そして、図8では、行動が「立ち止まる」と判断されたグリッドは黄色(図面では水玉模様)に彩色され、行動が「ゆっくり直進」と判断されたグリッドは青色(図面では横縞模様)に彩色され、行動が「早歩きで直進」と判断されたグリッドは赤色(図面では縦縞模様)に彩色される。なお、本実施例における移動行動とは、上記した行動を伴う移動を意味する。
【0067】
これらのことを踏まえて、「話しかけやすい警備員」および「話しかけにくい警備員」の代表移動行動データについて説明する。まず、図9(A)の代表移動行動ID「Ta1」の移動行動データは、「話しかけやすい警備員」が中央付近をうろうろするように「ゆっくり直進」していることを表す。また、図9(B)の代表移動行動ID「Ta2」の移動行動データは、「話しかけやすい警備員」が空間の中央付近で円を描くように「ゆっくり直進」していることを表す。そして、これらの代表移動行動データから、「話しかけやすい警備員」は目的を持っていないかのように、中央付近をゆっくりと移動していることが分かる。
【0068】
これに対して、図9(C)の代表移動行動ID「Tb1」の移動行動データは、「話しかけにくい警備員」が「早歩きで直進」しながら空間の縁に沿って空間内を一周していることを表す。また、図9(D)の代表移動行動ID「Tb2」の移動行動データは、「話しかけにくい警備員」が空間の右と上の淵を「早歩きで直進」していることを表す。そして、これらの代表移動行動データから、「話しかけにくい警備員」は目的を持っているかのように、素早く移動していることが分かる。
【0069】
そして、本実施例では、ロボット14に役割が設定されると、ロボット14の役割などに基づいて代表移動行動データが選択され、選択された代表移動行動データに基づいてロボット14の移動行動が制御される。
【0070】
まず、代表移動行動データを選択するために、DPマッチングを利用するため、ロボット14の移動軌跡が状態列に変換される。また、役割テーブルにおいて、ロボット14に設定されている役割を示す、代表移動行動IDの行に基づいて、複数の代表移動行動データが読み出され、複数の代表移動行動データのそれぞれに含まれる移動軌跡が状態列に変換される。さらに、ロボット14の状態列と各代表移動行動データの状態列それぞれとの類似度がDPマッチングによって算出される。そして、算出された類似度に基づいて、役割データベース20から代表移動行動データが選択される。なお、DPマッチングを利用して移動軌跡を比較する手法については、非特許文献1で開示されているため、詳細な説明は省略する。
【0071】
このように、ロボット14の移動軌跡を利用して代表移動行動データを選択することができるため、ロボット14の現在位置やそれまでの移動を考慮して、ロボット14の移動行動を決めることができる。
【0072】
また、代表移動行動データが選択されると、ロボット14の現在位置において、複数の将来位置および複数の将来位置における行動が予測される。さらに、予測された行動のそれぞれは発生確率が算出され、算出された各発生確率に基づいて、ロボットの14の移動行動が決められる。そして、中央制御装置10は、このようにして決められた移動行動に対応する動作命令を、ロボット14に付与する。
【0073】
たとえば、図10に示す状態では、ロボット10は左から右への移動軌跡を描きながら移動しており、そのロボット14に「話しかけにくい警備員」が設定されている。この場合、ロボット14の役割および移動軌跡などに基づいて、代表移動行動ID「b」の行が参照され、代表移動行動ID「Tb1」の移動行動データ(図9(C)参照)が選択される。
【0074】
そして、図11(A)を参照して、ロボット14の将来位置および行動として、ロボット14の右のグリッドに「早歩きで直進」、同じグリッドで「立ち止まる」、左のグリッドに「早歩きで直進」が予測される。さらに、予測された行動のそれぞれは発生確率が算出され、ロボット14の移動先は、発生確率が最も高い行動が求められたグリッドに決められる。ここでは、右のグリッドに「早歩きで直進」の発生確率が最も高いため、図11(B)に示すように、ロボット14は「早歩きで直進」して右側のグリッドに移動する。
【0075】
さらに、図11(C),(D)を参照して、移動した先のグリッドにおいても、ロボット14の将来位置および行動は予測され、右へ移動し続ける。つまり、ロボット14は、代表移動行動ID「Tb1」の移動行動データに含まれる移動軌跡と同じように移動する。
【0076】
たとえば、「話しかけやすい警備員」は、検出領域Eの中央付近をうろうろするような振る舞いが多くなる。そのため、ロボット14に「話しかけやすい警備員」の役割が設定されている場合、検出領域Eの中央付近では、うろうろするような移動行動の発生確率が高くなる。一方、検出領域Eの縁などでは、中央付近に移動する移動行動の発生確率が高くなる。また、他の実施例において「あまり移動しない警備員」の役割がロボット14に設定されていれば、数分は静止する移動行動の発生確率が高くなり、数分後には移動に関する移動行動の発生確率が高くなる。
【0077】
このように、役割を持った人間の移動行動データを蓄積することで、データを蓄積した同一の空間では、管理者は、役割を持った人間と同じようにロボット14を動作させることができる。
【0078】
なお、図11(A)−(D)において、グリッドの模様(色)は、発生確率によって濃度が変化する。たとえば、縦縞模様(赤色)または横縞模様(青色)の場合、発生確率が高くなるにつれて縞の密度(色の濃度)が高くなる。また、水玉模様(黄色)の場合、発生確率が高くなるにつれて水玉の密度(色の濃度)が高くなる。また、上記した色の濃度は、他の図面でも同じように表現されることが有る。
【0079】
ここで、ロボット14の周囲に人間Hが存在する場合について説明する。まず、図12(A)−図12(C)を参照して、「話しかけやすい警備員」が設定されたロボット14は、代表移動行動ID「Ta1」の移動行動データに含まれる移動軌跡と同じように移動する。また、図12(D)で示される時刻に、検出領域E内で人間Hが検出されると、次の時刻では、その人間Hの将来位置および行動が、ロボット14の将来位置および行動よりも先に予測される。そして、図12(E),(F)を参照して、ロボット14の将来位置および行動は、人間Hの将来位置(点線で囲われた範囲)を除いたグリッドにおいて予測される。つまり、人間が進む位置にはロボット14は進むことができないため、人間の将来位置ではロボット14の将来位置および行動は予測されないように出来る。
【0080】
なお、他の実施例では、検出領域E内で、複数の人間が同時に検出されてもよい。この場合、複数の人間のそれぞれに対して将来位置が予測される。
【0081】
図13は図4に示す中央制御装置10におけるメモリ18のメモリマップ300の一例を示す図解図である。図13が示すように、メモリ18はプログラム記憶領域302およびデータ記憶領域304を含む。プログラム記憶領域302には、中央制御装置10を動作させるためのプログラムとして、役割データベース構築プログラム310、役割設定プログラム312および移動制御プログラム314などが記憶される。
【0082】
役割データベース構築プログラム310は、新しい移動行動データを役割データベース20に追加するためのプログラムである。役割設定プログラム312は、ロボット14に役割を設定するためのプログラムである。移動制御プログラム314は、役割が設定されたロボット14の移動行動を制御するためのプログラムである。
【0083】
なお、図示は省略するが、中央制御装置10を動作させるためのプログラムには、ロボット14との無線通信を確立するためのプログラムなども含まれる。
【0084】
また、データ記憶領域304には、移動軌跡バッファ330、移動行動予測バッファ332、代表移動行動バッファ334および発生確率バッファ336が設けられる。また、データ記憶領域304には、地図データ338および役割データ340が記憶される。
【0085】
移動軌跡バッファ330には、LRF12によって検出された人間およびロボット14の移動軌跡が一時的に記憶される。移動行動予測バッファ332には、ロボット14および人間の予測された複数の将来位置および行動が一時的に記憶される。たとえば、移動行動予測バッファ332には、複数の将来位置を示す座標およびその座標に対応付けられた行動を示す代表移動行動IDが記憶される。代表移動行動バッファ334には、役割データベース20から選択された代表移動行動データが一時的に記憶される。発生確率バッファ336には、移動行動予測バッファ332に格納されている、予測された行動の発生確率が一時的に記憶される。
【0086】
地図データ338は、検出領域Eを示す地図の画像データであり、たとえば図8に示すように空間がグリッドに分けられた地図である。役割データ340は、ロボット14に設定された役割を示すデータである。
【0087】
なお、図示は省略するが、データ記憶領域304には、様々な計算の結果を一時的に格納するバッファなどが設けられると共に、中央制御装置10の動作に必要な他のカウンタやフラグなども設けられる。
【0088】
以下、中央制御装置10のCPU16によって実行されるプログラムについて説明する。図14のフロー図は役割データベース構築プログラム310による処理を示し、図15のフロー図は役割設定プログラム312による処理を示し、図16および図17のフロー図は移動制御プログラム314による処理を示す。
【0089】
図14は役割データベース構築処理のフロー図である。たとえば、管理者が役割を持つ人間の移動行動データを新たに追加する操作を行うと、中央制御装置10のCPU16は、ステップS1で開始操作がされたか否かを判断する。つまり、人間の移動軌跡および行動の蓄積を開始する操作がされたか否かを判断する。ステップS1で“NO”であれば、つまり開始する操作がされなければ、ステップS1の処理が繰り返し実行される。また、ステップS1で“YES”であれば、つまり開始する操作がされると、ステップS3で移動軌跡および行動を蓄積する。つまり、LRF12によって検出された移動軌跡とその移動軌跡が示す行動とが移動軌跡バッファ330に格納される。
【0090】
続いて、ステップS5では、所定時間(たとえば、60秒)が経過したか否かを判断する。つまり、移動行動を予測するに十分な移動軌跡および行動が蓄積されたか否かを判断する。ステップS5で“NO”であれば、つまり所定時間が経過していなければ、ステップS3に戻る。一方、ステップS5で“YES”であれば、つまり所定時間が経過すれば、ステップS7でラベル付け操作がされたか否かを判断する。たとえば、蓄積した移動軌跡および行動に対して、「話しかけやすい警備員」などのラベルを付ける操作がされたか否かを判断する。ステップS7で“NO”であれば、つまりラベルを付ける操作がされなければステップS7の処理が繰り返し実行される。
【0091】
また、ステップS7で“YES”であれば、つまりラベルを付ける操作がされると、ステップS9で蓄積した移動軌跡および行動に、代表移動行動IDを付けて、役割データベースに追加する。たとえば、「話しかけやすい警備員」のラベルが付ける操作がされると、蓄積した移動軌跡および行動に対して、「話しかけやすい警備員」の代表移動行動IDを付けて、代表移動行動データテーブルに追加する。なお、ステップS9の処理を実行するCPU16は追加手段として機能する。
【0092】
続いて、ステップS11では、終了操作がされたか否かが判断される。つまり、役割データベース構築処理を終了する操作がされた否かを判断する。ステップS11で“NO”であれば、つまり終了操作がされなければ、ステップS1に戻る。一方、ステップS11で“YES”であれば、つまり終了操作がされると、役割データベース構築処理が終了する。
【0093】
図15は役割設定処理のフロー図である。たとえば、管理者がロボット14に役割を設定するための処理を行うと、CPU16はステップS21で、役割が選択されたか否かを判断する。たとえば、「話しかけやすい警備員」、「話しかけにくい警備員」、「清掃員」、「あまり動かない監視員」および「受付係」の中から1つの役割が選択されたか否かを判断する。ステップS21で“NO”であれば、つまり役割が選択されなければ、ステップS21の処理が繰り返し実行される。また、ステップS21で“YES”であれば、つまり役割が選択されると、ステップS23でロボット14に選択された役割を設定し、役割設定処理を終了する。
【0094】
たとえば、「話しかけやすい警備員」が選択されていた場合、ステップS23では、ロボット14には「話しかけやすい警備員」が設定される。また、設定された役割は、役割データ340としてメモリ18に記憶される。なお、ステップS23の処理を実行するCPU16は、役割手段として機能する。
【0095】
図16および図17は移動制御処理のフロー図である。たとえば、中央制御装置10の電源がオンにされると、CPU16はステップS41で、ロボット14に設定された役割を取得する。つまり、役割データ340からロボット14に設定されている役割が取得される。続いて、ステップS43で終了操作か否かを判断する。つまり、移動制御処理を終了するための操作がされたか否かを判断する。ステップS43で“NO”であれば、終了操作がされなければ、ステップS45でロボットの現在位置および移動軌跡を取得する。つまり、移動軌跡バッファ330に格納されている移動軌跡を読み出し、移動軌跡の最後の位置を現在位置として取得する。なお、ステップS45の処理を実行するCPU16は移動軌跡取得手段として機能する。
【0096】
続いて、ステップS47でロボット14の役割、現在位置および移動軌跡に基づいて、代表移動行動データを選択する。まず、CPU16は、ロボット14の役割を示す役割IDの行から各代表移動行動IDを読み出す。次に、CPU16は、各代表移動行動IDが示す移動行動データに含まれる移動軌跡とロボット14の移動軌跡とを状態列に変換して、DPマッチングによって類似度を算出する。そして、類似度が最も高い代表移動行動データを、役割データベース20の代表移動行動データテーブルから選択する。また、選択された代表移動行動データは、代表移動行動バッファ334に格納される。なお、ステップS47の処理を実行するCPU16は選択手段として機能する。
【0097】
続いて、ステップS49でロボット14の将来位置および行動を予測する。つまり、選択された代表移動行動データに基づいて、次の時刻における複数の将来位置および行動を予測する。なお、ステップS49の処理を実行するCPU16は第1予測手段として機能する。
【0098】
続いて、ステップS51で人間が周囲に存在するか否かを判断する。つまり、検出領域E内で人間が検出されているか否かを判断する。ステップS51で“YES”であれば、つまり検出領域Eに人間が存在していれば、ステップS53で人間の移動軌跡を取得する。つまり、移動軌跡バッファ330から人間の移動軌跡を取得する。続いて、ステップS55で人間の移動軌跡に基づいて人間の将来位置を予測する。つまり、ロボット14の将来位置を予測する場合と同じように、予測用データベース22から人間の移動軌跡と類似する移動軌跡を選択する。そして、選択された移動軌跡に基づいて、次の時刻における人間の将来位置を予測する。なお、ステップS55の処理を実行するCPU16は第2予測手段として機能する。
【0099】
続いて、ステップS57では、人間の将来位置を除き、予測された行動の発生確率を算出する。たとえば、図12(E)のように、人間の将来位置を除いて、ロボット14の各将来位置において、ロボット14の行動の発生確率が算出される。そして、算出された発生確率は、将来位置を示す座標と対応付けられて発生確率バッファ336に格納される。
【0100】
また、周囲に人間がいなければ、ステップS51で“NO”と判断され、ステップS59で予測された行動の発生確率が算出される。たとえば、図11(A)に示すように、ロボット14の将来位置において行動の発生確率が算出される。
【0101】
なお、ステップS57またはステップS59の処理を実行するCPU16は算出手段として機能する。
【0102】
続いて、ステップS61では、算出された発生確率に基づいて、次の移動行動を決定する。たとえば、図11(A)のように発生確率が算出された場合、ロボット14の右側のグリッドにおける行動の発生確率が最も高いため、「右側のグリッドへ早歩きで直進する」という移動行動がステップS61の処理によって決められる。続いて、ステップS63では、ロボット14に移動行動を指示して、ステップS43に戻る。つまり、ステップS61で決められた移動行動の動作命令が、ロボット14に付与される。
【0103】
なお、ステップS43で“YES”であれば、つまり終了操作がされると、移動制御処理が終了する。
【0104】
以上のことから、移動制御システム100は、役割データベース20を備える中央制御装置10および役割が設定されたロボット14を有する。また、役割データベース20は、役割を持った人間の代表移動行動データから構成される。たとえば、ロボット14に「話しかけやすい警備員」の役割が設定されている場合、「話しかけやすい警備員」の代表移動行動データが役割データベース20から選択される。また、中央制御装置10では、役割が設定されたロボット14の複数の将来位置および各将来位置における行動が代表移動行動データに基づいて予測され、予測された複数の行動のそれぞれの発生確率が算出される。そして、ロボット14には、算出された発生確率に基づいて移動行動が指示される。
【0105】
したがって、ロボット14と同じ役割を持った人間の移動行動データに基づいて、ロボット14の移動行動が決まる。そのため、システムの管理者は、役割が設定されたロボットを、同じ役割を持った人間と同じように動作させることができる。
【0106】
なお、ロボット14が移動しておらず、移動軌跡が存在しない場合、DPマッチングを利用せずに、ロボット14の現在位置に近い座標を含む代表移動行動データが選択される。また、他の実施例では、DPマッチングとは異なる手法を利用して、代表移動行動が選択されてもよい。
【0107】
また、本実施例では、最も発生確率が高い行動が選択されたが、他の実施例では発生確率が80%を超える上位3つの行動からランダムに選択されてもよい。
【0108】
また、他の実施例では、「立ち止まってから、身体の向きを変える」や「後進する」などの行動が移動軌跡から検出されてもよい。
【0109】
また、人間の位置を検出するためにLRF12を用いたが、LRF12に代えて超音波距離センサやミリ波レーダなどを用いて、人間の位置が検出されてもよい。さらに、人間が所持する携帯通信端末の電波強度を利用して、人間の位置および移動軌跡が検出されてもよい。
【0110】
また、本実施例では、役割データベースを構成する代表移動行動は管理者の操作によって追加されているが、他の実施例では移動行動データが自動的に追加されてもよい。たとえば、人間の移動速度、行動範囲および移動軌跡の形状が所定条件を満たす場合に、その人間の移動行動データが役割データベース20に追加される。この場合、役割を持った人間の移動軌跡は携帯通信端末の電波強度を利用して検出し、その他の人間の移動軌跡はLRF12によって検出されてもよい。
【0111】
また、他の実施例では、複数の役割データベース20を用意しておき、季節、イベントおよび時間帯などによって使い分けてもよい。
【0112】
また、「機能的に同じ場所」であれば、役割データベースを構成した場所とは異なる場所で、その役割データベース20を利用してロボットの移動制御システム100を動作させてもよい。そして、「機能的に同じ場所」とは、空間の面積、空間の形、利用目的および内部と外部とに設置される設備などが同じ場所のことを表す。たとえば、幅および長さが略同じであり、内部と外部とに何も設備が設置されていない、2つの廊下は「機能的に同じ場所」と言うことができる。
【0113】
また、役割データベース構築プログラム310、役割設定プログラム312および移動制御プログラム314は、データ配信用のサーバのHDDに記憶され、ネットワークを介して本実施例と同等の構成のシステムにおける中央制御装置などに配信されてもよい。また、CD, DVD, BD (Blu-ray Disc)などの光学ディスク、USBメモリおよびメモリカードなどの記憶媒体にこれらのプログラムを記憶させた状態で、その記憶媒体が販売または配布されてもよい。そして、上記したサーバや記憶媒体などを通じてダウンロードされた、役割データベース構築プログラム310、役割設定プログラム312および移動制御プログラム314が、本実施例と同等の構成のシステムにおける中央制御装置にインストールされた場合、本実施例と同等の効果が得られる。
【0114】
そして、本明細書中で挙げた、自由度、距離、一定期間、半径、角度、周波数、平均移動速度、第1閾値、第2閾値および所定時間などの具体的な数値は、いずれも単なる一例であり、製品の仕様などの必要に応じて適宜変更可能である。
【符号の説明】
【0115】
10 …中央制御装置
12a−12f …LRF
14 …ロボット
16 …CPU
18 …メモリ
20 …役割データベース
100 …移動制御システム
200 …ネットワーク
【特許請求の範囲】
【請求項1】
役割を持った複数の人間の移動行動データから構成されるデータベースおよび役割が設定されるロボットを含む、ロボットの移動制御システムであって、
前記ロボットに設定された役割に基づいて前記データベースから移動行動データを選択する選択手段、
前記選択手段によって選択された移動行動データから前記ロボットの複数の移動行動を予測する第1予測手段、
前記第1予測手段によって予測された複数の移動行動のそれぞれの発生確率を算出する算出手段、および
前記算出手段によって算出された複数の発生確率に基づいて、前記ロボットに移動行動を指示する指示手段を備える、ロボットの移動制御システム。
【請求項2】
前記ロボットの移動軌跡を取得する移動軌跡取得手段をさらに備え、
前記選択手段は、前記移動軌跡取得手段によって取得された移動軌跡、前記ロボットに設定された役割および各移動行動データに含まれる移動軌跡に基づいて、前記データベースから移動行動データを選択する、請求項1記載の移動行動決定システム。
【請求項3】
前記第1予測手段によって予測された移動行動は、前記ロボットの将来位置を含み、
前記ロボットの周囲に人間が存在するとき、人間の将来位置を予測する第2予測手段をさらに備え、
前記算出手段は、前記第2予測手段によって予測された人間の将来位置を除いた前記ロボットの将来位置に基づいて、複数の移動行動の発生確率を算出する、請求項1または2記載の移動行動決定システム。
【請求項4】
中央制御装置、役割を持った複数の人間の移動行動データから構成されるデータベースおよび役割が設定されるロボットを含む、ロボットの移動制御システムであって、
前記中央制御装置のプロセッサを、
前記ロボットに設定された役割に基づいて前記データベースから移動行動データを選択する選択手段、
前記選択手段によって選択された移動行動データから前記ロボットの複数の移動行動を予測する予測手段、
前記予測手段によって予測された複数の移動行動のそれぞれの発生確率を算出する算出手段、および
前記算出手段によって算出された複数の発生確率に基づいて、前記ロボットに移動行動を指示する指示手段として機能させる、ロボットの移動制御プログラム。
【請求項5】
役割を持った複数の人間の移動行動データから構成されるデータベースおよび役割が設定されるロボットを含む、ロボットの移動制御システムのロボットの移動制御方法であって、
前記ロボットに設定された役割に基づいて前記データベースから移動行動データを選択し、
選択された移動鼓動データから前記ロボットの複数の移動行動を予測し、
予測された複数の移動行動のそれぞれの発生確率を算出し、そして
算出された複数の発生確率に基づいて、前記ロボットに移動行動を指示する、ロボットの移動制御方法。
【請求項1】
役割を持った複数の人間の移動行動データから構成されるデータベースおよび役割が設定されるロボットを含む、ロボットの移動制御システムであって、
前記ロボットに設定された役割に基づいて前記データベースから移動行動データを選択する選択手段、
前記選択手段によって選択された移動行動データから前記ロボットの複数の移動行動を予測する第1予測手段、
前記第1予測手段によって予測された複数の移動行動のそれぞれの発生確率を算出する算出手段、および
前記算出手段によって算出された複数の発生確率に基づいて、前記ロボットに移動行動を指示する指示手段を備える、ロボットの移動制御システム。
【請求項2】
前記ロボットの移動軌跡を取得する移動軌跡取得手段をさらに備え、
前記選択手段は、前記移動軌跡取得手段によって取得された移動軌跡、前記ロボットに設定された役割および各移動行動データに含まれる移動軌跡に基づいて、前記データベースから移動行動データを選択する、請求項1記載の移動行動決定システム。
【請求項3】
前記第1予測手段によって予測された移動行動は、前記ロボットの将来位置を含み、
前記ロボットの周囲に人間が存在するとき、人間の将来位置を予測する第2予測手段をさらに備え、
前記算出手段は、前記第2予測手段によって予測された人間の将来位置を除いた前記ロボットの将来位置に基づいて、複数の移動行動の発生確率を算出する、請求項1または2記載の移動行動決定システム。
【請求項4】
中央制御装置、役割を持った複数の人間の移動行動データから構成されるデータベースおよび役割が設定されるロボットを含む、ロボットの移動制御システムであって、
前記中央制御装置のプロセッサを、
前記ロボットに設定された役割に基づいて前記データベースから移動行動データを選択する選択手段、
前記選択手段によって選択された移動行動データから前記ロボットの複数の移動行動を予測する予測手段、
前記予測手段によって予測された複数の移動行動のそれぞれの発生確率を算出する算出手段、および
前記算出手段によって算出された複数の発生確率に基づいて、前記ロボットに移動行動を指示する指示手段として機能させる、ロボットの移動制御プログラム。
【請求項5】
役割を持った複数の人間の移動行動データから構成されるデータベースおよび役割が設定されるロボットを含む、ロボットの移動制御システムのロボットの移動制御方法であって、
前記ロボットに設定された役割に基づいて前記データベースから移動行動データを選択し、
選択された移動鼓動データから前記ロボットの複数の移動行動を予測し、
予測された複数の移動行動のそれぞれの発生確率を算出し、そして
算出された複数の発生確率に基づいて、前記ロボットに移動行動を指示する、ロボットの移動制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2012−110996(P2012−110996A)
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願番号】特願2010−261900(P2010−261900)
【出願日】平成22年11月25日(2010.11.25)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成21年6月19日付け、支出負担行為担当官 総務省大臣官房会計課企画官、研究テーマ「高齢者・障がい者(チャレンジド)のためのユビキタスネットワークロボット技術の研究開発」に関する委託研究、産業技術力強化法第19条の適用を受ける特許出願
【出願人】(393031586)株式会社国際電気通信基礎技術研究所 (905)
【Fターム(参考)】
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願日】平成22年11月25日(2010.11.25)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成21年6月19日付け、支出負担行為担当官 総務省大臣官房会計課企画官、研究テーマ「高齢者・障がい者(チャレンジド)のためのユビキタスネットワークロボット技術の研究開発」に関する委託研究、産業技術力強化法第19条の適用を受ける特許出願
【出願人】(393031586)株式会社国際電気通信基礎技術研究所 (905)
【Fターム(参考)】
[ Back to top ]