
ロボットの電磁ブレーキ制御装置
【課題】多関節型ロボットのアーム等を駆動するサーボモータにおいて、そのサーボモータが有する非励磁作動型の電磁ブレーキの発熱を抑制することのできる電磁ブレーキ制御装置を提供する。
【解決手段】多関節型ロボットの各関節に駆動軸を駆動するモータ21〜26が設けられ、CPU30は、その各モータ21〜26が有する非励磁作動型の電磁ブレーキ21b〜26bによる駆動軸の制動を制御する。CPU30は、駆動軸の制動を解除する期間において、電磁ブレーキ21b〜26bの励磁コイル21c〜26cへの電圧印加を繰返しON及びOFFするON−OFF制御を実行しつつ、駆動軸の制動が解除された状態を維持する。
【解決手段】多関節型ロボットの各関節に駆動軸を駆動するモータ21〜26が設けられ、CPU30は、その各モータ21〜26が有する非励磁作動型の電磁ブレーキ21b〜26bによる駆動軸の制動を制御する。CPU30は、駆動軸の制動を解除する期間において、電磁ブレーキ21b〜26bの励磁コイル21c〜26cへの電圧印加を繰返しON及びOFFするON−OFF制御を実行しつつ、駆動軸の制動が解除された状態を維持する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ロボットのアーム等を駆動するサーボモータにおいて、そのサーボモータが有する非励磁作動型の電磁ブレーキを制御する装置に関する。
【背景技術】
【0002】
従来、多関節型ロボットの関節においてアームを駆動するサーボモータは、その駆動軸を制動するブレーキを有している。このブレーキには、フェールセーフとなるように、非励磁作動型の電磁ブレーキが用いられている(例えば、特許文献1参照)。ロボットの停止中は、電磁ブレーキの励磁コイルへの電流が遮断され、ばねの弾性力等に基づき電磁ブレーキによる駆動軸の制動が行われる。一方、ロボットの動作中は、電磁ブレーキの励磁コイルに電流が供給され、電磁ブレーキによる駆動軸の制動が解除される。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−307618号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、一般に上記サーボモータには、駆動軸の回転位置を検出するエンコーダが設けられている。このエンコーダは、所定パターンに形成された回転子の回転を光学的あるいは磁気的に検出して、そのパルス信号をIC等により処理している。
【0005】
ここで、ロボットの電磁ブレーキは、一般に一日の初めにおいてロボットの動作が開始される前に駆動軸の制動を解除した状態とされ、その日の終わりにおいてロボットの動作が終了されるまで駆動軸の制動を解除した状態で維持される。このため、電磁ブレーキの励磁コイルを含む回路では、通電による発熱が一日中継続されることとなる。サーボモータ及び電磁ブレーキの発熱によりエンコーダの温度が上昇すると、パルス信号を処理するIC等の動作が不安定となり、エンコーダによる回転位置の検出精度が低下するおそれがある。この対策として、エンコーダの温度がその許容温度を超えたとき又は超えると予測されるときに、サーボモータの駆動を制限してその駆動回路からの発熱を抑制するようにしている。
【0006】
しかしながら、サーボモータの駆動を制限した場合には、ロボットの動作時間が制限されることとなるため、電磁ブレーキの発熱対策としては未だ改善の余地を残すものとなっている。
【0007】
本発明は、こうした実情に鑑みてなされたものであり、多関節型ロボットのアーム等を駆動するサーボモータにおいて、そのサーボモータが有する非励磁作動型の電磁ブレーキの発熱を抑制することのできる電磁ブレーキ制御装置を提供することを主たる目的とするものである。
【課題を解決するための手段】
【0008】
本発明は、上記課題を解決するために、以下の手段を採用した。
【0009】
第1の発明は、多関節型ロボットの各関節に駆動軸を駆動するサーボモータが設けられ、その各サーボモータが有する非励磁作動型の電磁ブレーキによる前記駆動軸の制動を制御する装置であって、前記駆動軸の制動を解除する期間において、前記電磁ブレーキの励磁コイルへの電力供給を繰返しON及びOFFするON−OFF制御を実行しつつ、前記駆動軸の制動が解除された状態を維持する制動解除維持手段を備えることを特徴とする。
【0010】
上記構成によれば、多関節型ロボットの動作中には、各関節において駆動軸を駆動するサーボモータが有する非励磁作動型の電磁ブレーキに電力が供給される。そして、電磁ブレーキによる駆動軸の制動が解除された状態において、サーボモータが駆動されてロボットの各関節における駆動軸の駆動が行われる。
【0011】
ここで、電磁ブレーキによる駆動軸の制動が解除された状態を維持するためには、必ずしも励磁コイルへ電力を供給し続ける必要はないことが本願発明者らによって発見された。すなわち、励磁コイルへの電力供給を停止した後も、駆動軸の制動が解除された状態が一定期間維持されることが本願発明者らによって確認された。
【0012】
この点、上記構成によれば、駆動軸の制動を解除する期間において、電磁ブレーキの励磁コイルへの電力供給を繰り返しON及びOFFするON−OFF制御が実行されつつ、駆動軸の制動が解除された状態が維持される。このため、電磁ブレーキの励磁コイルへ供給される電力を抑制することができ、励磁コイルを含む回路の通電による発熱を抑制することができる。その結果、サーボモータの温度上昇を抑制することができるため、サーボモータの駆動が制限される状況を減らして、ロボットの動作時間を長くすることができる。
【0013】
なお、前記制動解除維持手段は、多関節型ロボットに設けられた複数の電磁ブレーキのうち、一部のみに対して電力供給のON−OFF制御を行ってもよいし、全てに対して電力供給のON−OFF制御を行ってもよい。すなわち、一般に多関節型ロボットの駆動軸を駆動するサーボモータではその駆動負荷がそれぞれ異なり、それに対応してサーボモータが有する電磁ブレーキの制動負荷もそれぞれ異なっている。このため、複数のサーボモータ及び電磁ブレーキには定格電力の異なるものが含まれており、この定格電力の差異に応じて通電による発熱量も異なる。したがって、発熱を抑制する必要性の高い(定格電力の大きい)電磁ブレーキに対して制動解除維持手段による電力供給のON−OFF制御を実行し、発熱を抑制する必要性の低い(定格電力の小さい)電磁ブレーキに対して、従来と同様の制御(電力供給のON状態を維持する制御)を実行するようにしてもよい。こうした構成によれば、発熱を抑制する必要性の低い電磁ブレーキでは、励磁コイルへの電力供給を行う回路として従来と同様のものを用いることができる。
【0014】
上記のように、一般に多関節型ロボットの複数の電磁ブレーキでは、制動負荷がそれぞれ異なるため、定格電力の異なるものが含まれている。その場合、前記制動解除維持手段による電力供給のON−OFF制御において、駆動軸の制動が解除された状態を維持するために必要な電力供給のON期間が電磁ブレーキによって異なったものとなる。
【0015】
この点、第2の発明では、第1の発明において、前記電磁ブレーキとして定格電力の異なる複数の電磁ブレーキを含み、前記制動解除維持手段は、前記ON−OFF制御においてON期間とOFF期間とを周期的に繰返すものであり、前記ON期間とOFF期間との比率が前記電磁ブレーキ毎に予め定められているといった構成を採用している。したがって、各電磁ブレーキにおいて駆動軸の制動が解除された状態を維持する際に、ON−OFF制御におけるON期間とOFF期間との比率を、各電磁ブレーキの特性(定格電力)や使用状況(制動負荷)に応じて適切に設定することができる。
【0016】
なお、複数の電磁ブレーキにおいて、ON−OFF制御の周期は、同一であってもよいし、異なっていてもよい。ON−OFF制御の周期が同一である場合には、制御周期を一定として、そのうちのON期間の割合(DUTY)を電磁ブレーキ毎に設定すればよい。また、ON−OFF制御の周期が異なる場合には、各電磁ブレーキの特性や使用状況に応じてON期間とOFF期間との長さを設定すればよい。
【0017】
一般に多関節ロボットでは、温度上昇を抑制するためにサーボモータの駆動を制限する場合には、温度上昇の大きいサーボモータだけではなく、全ての関節に設けられたサーボモータの駆動が制限され、ロボット全体の動作が停止される。また通常、ロボットのアーム等はカバーで覆われており、サーボモータや電磁ブレーキで温度上昇した空気の対流によって、カバー内部の全体の温度が上昇する。したがって、サーボモータの駆動が制限される状況を減らすためには、複数の電磁ブレーキ全体の発熱を抑制することが重要となる。
【0018】
この点、第3の発明では、第2の発明において、前記ON期間とOFF期間との比率は、各駆動軸の制動が解除された状態を維持することが可能な範囲でOFF期間の比率が最大である所定比率に予め定められている。すなわち、各励磁コイルへの電力供給のON−OFF制御において、可能な限りOFF期間が長くなるように設定されている。したがって、各電磁ブレーキにおいて励磁コイルを含む回路の発熱を最小限に抑えつつ、駆動軸の制動が解除された状態を維持することができる。その結果、サーボモータの駆動が制限される状況を更に減らして、ロボットの動作時間を更に長くすることができる。
【0019】
第4の発明では、第1乃至第3のいずれかの発明において、共通の電源から各電磁ブレーキに電力が供給されており、前記制動解除維持手段は、前記ON−OFF制御においてON期間とOFF期間とを周期的に繰返すものであり、第1電磁ブレーキの励磁コイルと第2電磁ブレーキの励磁コイルとで、電力供給のON期間が互いに重複しないようにずらすことを特徴とする。
【0020】
上記構成によれば、前記ON−OFF制御においてON期間とOFF期間とが周期的に繰返される。そして、第1電磁ブレーキの励磁コイルと第2電磁ブレーキの励磁コイルとで、電力供給のON期間が互いに重複しないようにずらされる。したがって、共通の電源から各電磁ブレーキに電力が供給される構成において、電源に要求される最大電力を抑制することができるため、電源容量を小さくすることができる。
【0021】
なお、少なくとも第1電磁ブレーキと第2電磁ブレーキとにおいて電力供給のON期間が互いに重複しなければよく、第1電磁ブレーキ又は第2電磁ブレーキと電力供給のON期間が重複する他の電磁ブレーキを含んでいてもよい。また、第1電磁ブレーキ及び第2電磁ブレーキは、単数であっても複数であってもよい。
【0022】
多間接型ロボットでは、電磁ブレーキを有するサーボモータの数が多くなるため、全ての電磁ブレーキにおいて励磁コイルへの電力供給のON期間が互いに重複しないようにすることは難しい。ここで、複数の励磁コイルへの電力供給のON期間が重複する場合、電源容量を小さくするためには電力の合計の最大値を抑制することが望ましい。
【0023】
この点、第5の発明では、第4の発明において、前記第1電磁ブレーキの定格電力は前記第2電磁ブレーキの定格電力よりも大きく、前記第1電磁ブレーキの数は前記第2電磁ブレーキの数よりも少ないといった構成を採用している。このため、第1電磁ブレーキよりも定格電力の小さい第2電磁ブレーキにおいて、励磁コイルへの電力供給のON期間がより多く重複することとなる。なお、第1電磁ブレーキの励磁コイルと第2電磁ブレーキの励磁コイルとでは、電力供給のON期間が互いに重複しないようにずらされている。したがって、複数の励磁コイルへの電力供給のON期間が重複する場合に、電力の合計の最大値を抑制することができる。
【0024】
具体的には、第6の発明のように、第4又は第5の発明において、前記制動解除維持手段は、前記第1電磁ブレーキの励磁コイルと前記第2電磁ブレーキの励磁コイルとで、前記ON−OFF制御を同一の周期で行うといった構成を採用することができる。こうした構成によれば、第1電磁ブレーキ及び第2電磁ブレーキでそれぞれ1つのON期間を各周期において繰返すことによって、ON期間が互いに重複しないようにずらすことができる。したがって、ON期間が互いに重複しないようにずらすための複雑な制御が不要となる。
【0025】
また、第7の発明のように、第4乃至第6のいずれかの発明において、前記制動解除維持手段は、定格電力の最も大きい2つの電磁ブレーキを、それぞれ異なるグループの前記第1電磁ブレーキとし、各グループにおいて、第1電磁ブレーキの励磁コイルと第2電磁ブレーキの励磁コイルとで、電力供給のON期間が互いに重複しないようにずらすといった構成を採用することができる。こうした構成によれば、電磁ブレーキを有するサーボモータの数が多い場合であっても、電源に要求される最大電力をグループ単位で抑制することができる。
【0026】
第8の発明では、第1乃至第3のいずれかの発明において、共通の電源から各電磁ブレーキに電力が供給されており、前記電磁ブレーキとして、定格電力の最も大きい第1電磁ブレーキと、定格電力の2番目に大きい第2電磁ブレーキと、その他の第3電磁ブレーキとを含み、前記制動解除維持手段は、前記ON−OFF制御においてON期間とOFF期間とを周期的に繰返すものであり、前記第1電磁ブレーキの励磁コイルと、前記第2電磁ブレーキ及び前記第3電磁ブレーキの励磁コイルとで、電力供給のON期間が互いに重複しないようにずらすことを特徴とする。
【0027】
上記構成によれば、前記ON−OFF制御においてON期間とOFF期間とが周期的に繰返される。そして、定格電力の最も大きい第1電磁ブレーキの励磁コイルと、定格電力の2番目に大きい第2電磁ブレーキの励磁コイルとで、電力供給のON期間が互いに重複しないようにずらされる。したがって、電力の合計が最も大きくなる2つの電磁ブレーキの組み合わせにおいて、電力供給のON期間が互いに重複しないようにずらすことができる。さらに、第1電磁ブレーキの励磁コイルと第3電磁ブレーキの励磁コイルとで、電力供給のON期間が互いに重複しないようにずらされる。このため、第2電磁ブレーキの励磁コイルと第3電磁ブレーキの励磁コイルとで、電力供給のON期間が互いに重複したとしても、第1電磁ブレーキの励磁コイルと第3電磁ブレーキの励磁コイルとで、電力供給のON期間が互いに重複する場合よりも、電力の合計の最大値を抑制することができる。
【図面の簡単な説明】
【0028】
【図1】ロボットの電磁ブレーキ制御装置の概要を示すブロック図。
【図2】ロボットの概要を示す正面図。
【図3】電磁ブレーキの励磁コイルへの印加電圧と電流とを示すタイムチャート。
【図4】第1実施形態の電磁ブレーキの制御態様を示すタイムチャート。
【図5】同実施形態の電磁ブレーキの制御態様の変形例を示すタイムチャート。
【図6】第2実施形態の電磁ブレーキの制御態様を示すタイムチャート。
【図7】第3実施形態の電磁ブレーキの制御態様を示すタイムチャート。
【発明を実施するための形態】
【0029】
(第1実施形態)
以下、垂直多関節型ロボットに具体化した第1実施形態について、図面を参照しつつ説明する。本実施形態のロボットは、例えば産業用ロボットとして機械組立工場などの組立システムにて用いられる。
【0030】
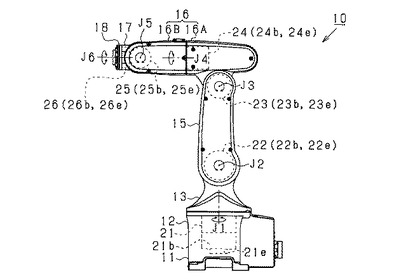
はじめに、ロボット10の概要を図2に基づいて説明する。同図に示すように、ロボット10は、回動中心軸線として第1軸J1、第2軸J2、第3軸J3、第4軸J4、第5軸J5、第6軸J6を有する6軸ロボットであり、これら各軸における各部の動作角度がそれぞれサーボモータ等からなる駆動源の駆動により調整されるものとなっている。サーボモータはいずれも正逆両方向の回転が可能であり、モータ駆動により原点位置を基準として各部が動作する。本実施形態では、第1軸J1が鉛直方向に延びるようにしてロボット10が床等のロボット設置箇所に設置されるものとしており、図1の上下方向が鉛直方向を示すとして以下説明する。
【0031】
ロボット10において、基台11は、床等に固定される固定部12と、その固定部12の上方に設けられる回動部13とを有しており、回動部13が第1軸J1を回動中心として水平方向に回動可能になっている。回動部13の上端部分には下アーム15が回動可能に連結されている。下アーム15は基本姿勢として鉛直方向に延びる向きに設けられ、その上端部には上アーム16が回動可能に連結されている。上アーム16は基本姿勢として水平方向に延びる向きに設けられている。
【0032】
下アーム15は、水平方向に延びる第2軸J2を回動中心として回動部13に対して回動可能になっており、所定の動作範囲内において時計回り方向又は反時計回り方向に回動動作する。また、上アーム16は、水平方向に延びる第3軸J3を回動中心として下アーム15に対して回動可能になっており、所定の動作範囲内において時計回り方向又は反時計回り方向に回動動作する。
【0033】
上アーム16は、基端側と先端側とで2つのアーム部に分割されて構成されており、基端側は第1上アーム16A、先端側は第2上アーム16Bとなっている。第1上アーム16Aは上述したとおり下アーム15に回動可能に連結されている。これに対し、第2上アーム16Bは、本上アーム16の長手方向に延びる第4軸J4を回動中心として第1上アーム16Aに対してねじり方向に回動可能になっている。
【0034】
上アーム16(詳しくは第2上アーム16B)の先端部には手首部17が設けられ、その手首部17には、ワークやツール等を取り付けるためのハンド部18が設けられている。手首部17は、水平方向に延びる第5軸J5を回動中心として第2上アーム16Bに対して回動可能になっている。また、ハンド部18は、その中心線である第6軸J6を回動中心としてねじり方向に回動可能になっている。
【0035】
ロボット10において各軸J1〜J6の関節部分には、それぞれ前段部材側にモータ(サーボモータ)21〜26が設けられている。そして、各関節部分において、前段部材に設けられたモータの駆動により、後段部材がそれぞれ回動動作する。なお、モータ21〜26の出力軸(駆動軸)の中心軸線がそれぞれ第1軸J1〜第6軸J6となっている。
【0036】
各モータは、その出力軸を制動する非励磁作動型の電磁ブレーキ21b〜26b(電磁ブレーキ21bのみ表示)と、出力軸の回転位置に応じたパルス信号を出力するエンコーダ21e〜26e(エンコーダ21eのみ表示)とを有している。各電磁ブレーキ21b〜26bは、ばねの弾性力に基づき駆動軸(モータの出力軸)の制動を行い、励磁コイルへの電力供給に基づき駆動軸の制動を解除する。各エンコーダ21e〜26eは、所定パターンに形成された回転子の回転を磁気的又は光学的に検出する検出素子と、その検出素子の信号を処理するICとを有している。電磁ブレーキ21b〜26b及びエンコーダ21e〜26eは、それぞれモータ21〜26に組み込まれており、モータ21〜26と一体化されている。すなわち、各モータ21〜26は、その回転駆動部とブレーキとエンコーダとを含むユニットとして構成されている。
【0037】
ここで、ロボット10の各関節部分において、各モータ21〜26が駆動軸を駆動する負荷はそれぞれ異なっている。すなわち、各モータ21〜26が回動動作させる部分の質量が大きいほど駆動負荷が大きくなり、また重力の作用に抗して各部を回動動作させる関節部分では駆動負荷が大きくなる。このため、各関節部分において駆動負荷に応じた定格電力のモータが採用されており、駆動負荷の大きい関節部分ほど定格電力の大きいモータが採用されている。具体的には、モータ21,22の定格電力は、モータ23〜26の定格電力よりも大きくなっている。そして、モータ21とモータ22の定格電力は互いに等しく、またモータ23〜26の定格電力は互いに等しくなっている。
【0038】
こうした駆動負荷の大きいモータほど、駆動軸を制動する制動負荷が大きいため、制動力の大きい電磁ブレーキ、すなわち定格電力の大きい電磁ブレーキが採用されている。具体的には、モータ21,22がそれぞれ有する電磁ブレーキ21b,22bの定格電力P1は、モータ23〜26がそれぞれ有する電磁ブレーキ23b〜26bの定格電力P2よりも大きくなっている(P1=2×P2)。例えば、定格電力P1は6Wであり、定格電力P2は3Wである。
【0039】
ロボット10の各部(モータ21〜26等)はそれぞれカバーで覆われており、塵や油等の異物が外部から侵入することが抑制されている。これらカバーの内部は互いに連通しており、この連通部に電気配線等が通されている。このため、各カバー間を空気が流出入可能となっている。
【0040】
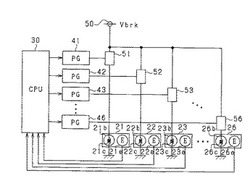
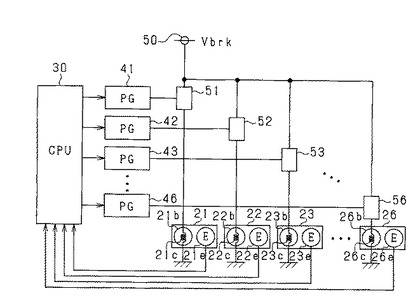
次に、図1を参照して、このようなロボット10の複数の電磁ブレーキ21b〜26bを制御する装置について説明する。同図は、ロボット10の動作を統括して制御する装置のうち、電磁ブレーキを制御する装置を示したものである。なお、同図では、一部の電磁ブレーキ及びその電気回路等を省略して示している。
【0041】
電磁ブレーキ21b〜26bは、それぞれ励磁コイル21c〜26cを有している。各励磁コイル21c〜26cの一端は、それぞれ半導体リレー51〜56を介してブレーキ用電源50に接続され、その他端はそれぞれグランドに接続されている。ブレーキ用電源50は、24Vの直流電圧Vbrkを発生するものである。
【0042】
また、各電磁ブレーキ21b〜26bは、ばねの弾性力に基づきモータ21〜26の各出力軸を制動する機械部分を有している。各機械部分は、モータの出力軸を制動する摩擦力を互いの当接により発生するパッド及びライニング(摩擦部材)と、このパッドをライニングに当接させる方向に付勢するばねとを有している。パッド及びライニングは、各モータ21〜26のケース及び出力軸にそれぞれ取付けられている。ばねの付勢力によりパッドがライニングに押圧され、パッドとライニングとの間で摩擦力が発生する。この摩擦力によって、各モータ21〜26の駆動軸が制動される。
【0043】
これに対して、各励磁コイル21c〜26cへの直流電圧Vbrkの印加(電力の供給)に基づいて、上記ばねによる付勢力と反対方向の力、すなわち上記ライニングからパッドを離間させる方向の力が発生する。そして、ばねによる付勢力よりも、励磁コイルへの通電に基づく力が大きい場合に、各駆動軸の制動が解除される。
【0044】
また、パッドは所定の可動範囲内で移動し、可動範囲の一端が上記ライニングに当接する位置(制動位置)であり、その他端が制動位置から最も離れた位置である。このため、パッドが制動位置から離れている状態では、駆動軸を制動する力が発生しておらず、駆動軸の制動が解除された状態となる。
【0045】
各半導体リレー51〜56には、パルス発生器(PG)41〜46がそれぞれ接続されている。そして、各半導体リレー51〜56は、PG41〜46から発生されるON−OFFのパルス信号によってスイッチング駆動され、パルス信号のON期間で電気的な接続状態となり、パルス信号のOFF期間で電気的な遮断状態となる。各半導体リレー51〜56の接続状態において、ブレーキ用電源50から励磁コイル21c〜26cにそれぞれ直流電圧Vbrkが印加され、励磁コイル21c〜26cにそれぞれ電流が流れる。詳しくは、直流電圧Vbrkの印加期間において電流が増大し、直流電圧Vbrkの非印加期間において電流が減少する。この直流電圧の印加期間又は非印加期間がある程度長くなると、電流はそれぞれ一定値に収束することとなる。
【0046】
各PG41〜46が発生するパルス信号は、CPU30からの駆動信号に基づいてそれぞれ制御される。CPU30は、各PG41〜46が発生するパルス信号の周期、位相、ON期間とOFF期間との比率等を制御する。本実施形態では、CPU30は、各PG41〜46が発生するパルス信号の周期を一定とし、その周期のうちのON期間の割合(DUTY)を制御する。こうしてCPU30は、各励磁コイル21c〜26cに直流電圧Vbrkが印加される態様、ひいては各励磁コイル21c〜26cに流れる電流の状態を制御する。なお、CPU30には、各モータ21〜26が有するエンコーダ21e〜26eからの検出信号がそれぞれ入力される。そして、ロボット10の制御装置は、これらのエンコーダ21e〜26eからの検出信号に基づいて、各モータ21〜26の駆動軸の回転位置を制御する。
【0047】
こうした構成を備えるロボット10では、一日の初めにおいて動作(機械の組立作業等)を開始するに際して、各電磁ブレーキ21b〜26bによる駆動軸の制動を解除した状態とする。この各駆動軸の制動が解除された状態において、ロボット10の制御装置は各モータ21〜26を駆動して、各軸J1〜J6の関節部分における駆動軸の駆動を行う。一方、その日の終わりにおいてロボット10の動作を終了するに際して、各モータ21〜26の駆動を停止するとともに、各電磁ブレーキ21b〜26bによる駆動軸の制動を行う。
【0048】
ここで、各モータ21〜26及び各電磁ブレーキ21b〜26bの発熱によりエンコーダ21e〜26eの温度が上昇すると、各エンコーダ21e〜26eが有する検出素子やICの動作が不安定となり、モータ21〜26の出力軸の回転位置を検出する精度が低下するおそがある。その場合、エンコーダ21e〜26eからの検出信号に基づく各モータ21〜26の制御精度が低下し、ロボット10の動作が不正確になるおそれがある。この対策として、ロボット10の制御装置は、エンコーダ21e〜26eのいずれかの温度がその許容温度(95℃)を超えると、全てのモータ21〜26の駆動を停止してその駆動回路からの発熱を抑制する。
【0049】
すなわち、複数のモータ21〜26のうち、有しているエンコーダの温度が許容温度を超えているモータだけではなく、全ての関節部分に設けられたモータ21〜26の駆動を停止し、ロボット10全体の動作を停止する。ロボット10の動作を行うためには、基本的には全てのモータ21〜26を駆動する必要があるため、複数のモータ21〜26のうちの1つでも停止する必要がある場合には、ロボット10全体の動作を停止することとしている。
【0050】
また、ロボット10の各部はそれぞれカバーで覆われており、これらカバーの内部は互いに連通している。このため、モータ21〜26や電磁ブレーキ21b〜26bで温度上昇した空気は、これらカバーの内部を対流することとなり、カバー内部の全体の温度が上昇する。したがって、いずれのエンコーダも許容温度を超えないようにするためには、複数の電磁ブレーキ21b〜26b全体の発熱を抑制することが重要となる。なお、各エンコーダ21e〜26eの温度は、サーミスタ等により直接検出してもよいし、各モータ21〜26の駆動状況に基づいて予測してもよい。
【0051】
本実施形態では、各モータ21〜26が有する電磁ブレーキ21b〜26bの発熱をそれぞれ抑制すべく、各モータ21〜26の駆動軸の制動を解除する期間において、各励磁コイル21c〜26cへの直流電圧Vbrkの印加(電力の供給)を繰返しON及びOFFするON−OFF制御を実行しつつ、各関節部分において駆動軸の制動が解除された状態を維持する。詳しくは、各モータ21〜26の駆動軸の制動を解除する期間において、各励磁コイル21c〜26cに印加される直流電圧VbrkをDUTY制御する。そして、このDUTY制御において、各駆動軸の制動が解除された状態を維持することのできるDUTYに制御する。
【0052】
ここで、各励磁コイル21c〜26cへの電圧印加を停止すると、励磁コイル21c〜26cに流れる電流は時間の経過とともに減衰する。このため、電圧印加を停止してから短時間しか経過していない状態では、電流の大きさは0になっておらず、各励磁コイル21c〜26cへの通電に基づく力もある程度残っている。したがって、各電磁ブレーキ21b〜26bの機械部分において上記パッドとライニングとが離れている状態、すなわち駆動軸の制動が解除された状態が短時間であれば維持されている。そして、パッドがライニングに当接する位置(制動位置)に到達する前に、各励磁コイル21c〜26cへの電圧印加を再開することにより、パッドを制動位置から離れる側へ移動させることができる。
【0053】
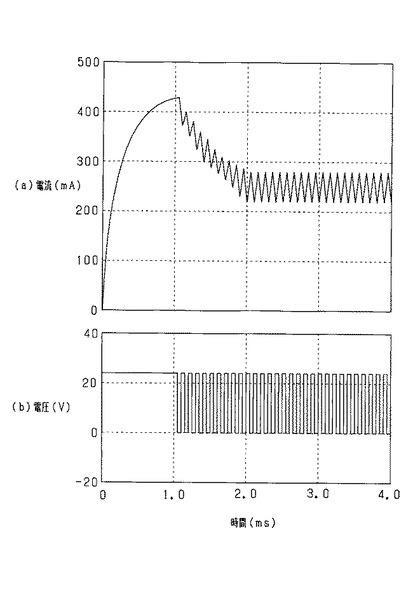
図3に、電磁ブレーキの励磁コイルへの印加電圧と電流との時間的変化の一例を示す。なお、この例では、電磁ブレーキの上記機械部分においてパッドとライニングとが確実に離間するように、励磁コイルへの電圧印加の初期において、所定期間にわたってDUTY100%(電圧の印加をON)としている。これにより、パッド及びライニングの駆動を開始する際に、これらに作用する最大静止摩擦力を超える力を確実に発生させることができる。
【0054】
同図に示すように、周期0.1msにおいて、0〜1.0msまでDUTY100%で電圧を励磁コイルに印加し、その後にDUTY50%の矩形パルス状の電圧を励磁コイルに印加する。これにより、励磁コイルに流れる電流は、0〜1.0msの期間において0mAから430mA付近まで急激に増大し、電磁ブレーキのパッドは制動位置から最も離れた位置まで確実に移動する。そして、励磁コイルに流れる電流は、その後の期間において電圧の印加期間で増大して非印加期間で減少することを繰返しながら次第に小さくなる。そして、電圧の印加開始から約2.0msで電流値がそれ以上減少しなくなり、以後は250mA付近で増大と減少とを繰返す。
【0055】
このとき、250mA付近において電流が増大した状態では、電磁ブレーキのパッドは制動位置から最も離れた位置で維持されている。そして、この状態から電流が減少すると、励磁コイルへの通電に基づく力が、ばねの付勢力よりも小さくなった時点で、パッドが制動位置側へ移動し始める。しかし、パッドが制動位置に到達する前に励磁コイルへの電圧印加が再開され、電流が増大することによりパッドが制動位置から離れる側へ移動又は押圧されることとなる。
【0056】
一方、こうしたパルス制御においてDUTYが小さ過ぎると、電圧の非印加期間で電流が減少するときに、パッドが制動位置に到達して駆動軸が制動されることとなる。そして、電圧の印加期間で電流が増大しても、パッドが制動位置から離れる側に移動せず、駆動軸の制動を解除することができない。また、パルスの周期が長過ぎると、電圧の非印加期間で電流が減少するときに、パッドが制動位置に到達して駆動軸が制動されることとなる。これらを踏まえて、パルスの周期及びDUTYを適切に設定することにより、励磁コイルに印加される直流電圧VbrkをON−OFF制御(DUTY制御)しつつ、駆動軸の制動が解除された状態を維持することができる。
【0057】
また、各電磁ブレーキの定格電力(特性)や制動負荷(使用状況)によって、各駆動軸の制動が解除された状態を維持することのできるDUTYは異なったものとなる。そこで、本実施形態では、励磁コイルに印加する直流電圧VbrkのON−OFF制御において、電磁ブレーキ毎にDUTYを予め定めている。具体的には、各駆動軸の制動が解除された状態を維持することが可能な範囲で、取り得る最小のDUTYに定めている。すなわち、電圧印加のON期間とOFF期間との比率を、OFF期間の比率が最大となるように定めている。なお、このようなDUTYは、予め実験やシミュレーション等に基づいて定めることができる。
【0058】
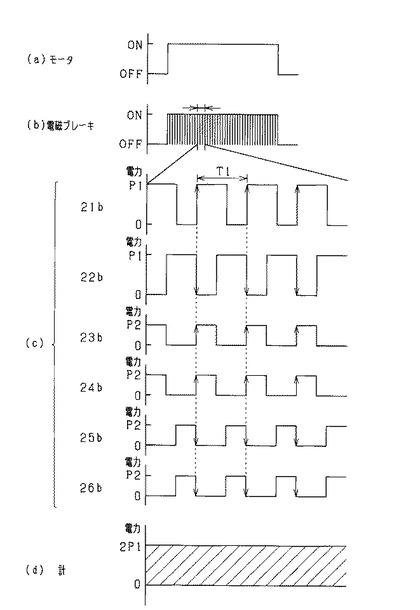
図4に、各電磁ブレーキに供給される電力(本実施形態では、印加される電圧)の制御態様を示す。この制御は、上記CPU30(制動解除維持手段)によって、各PG41〜46の発生するパルス信号を制御することにより実行される。なお、図4(a)は、ロボット10のモータ21〜26の動作状態を示しており、図4(b)は、電磁ブレーキ21b〜26bの動作状態を示しており、図4(c)は、図4(b)の一部の期間を拡大して、各電磁ブレーキ21b〜26bの励磁コイル21c〜26cにそれぞれ供給する電力を簡略化して示しており、図4(d)は、図4(c)の各電磁ブレーキ21b〜26bの励磁コイル21c〜26cに供給する電力の合計を簡略化して示している。図4(c),(d)では、電力の波形を簡略化して矩形波として示しているが、実際には電流の減衰があるため、電力の波形は矩形波がくずれた形となる。
【0059】
図4(a),(b)に示すように、各電磁ブレーキ21b〜26bによる駆動軸の制動を解除(各電磁ブレーキ21b〜26bへの電力供給をON)するとともに、ロボット10の制御装置により各モータ21〜26の駆動が開始される。各電磁ブレーキ21b〜26bでは、各駆動軸の制動を解除する期間(ロボット10の動作期間)において、その初期に各駆動軸の制動を確実に解除した後、各駆動軸の制動が解除された状態を維持することのできるON期間とOFF期間との比率で、各励磁コイル21c〜26cに印加する直流電圧VbrkをそれぞれON−OFF制御(DUTY制御)する。各電磁ブレーキ21b〜26bにおいて、励磁コイル21c〜26cにそれぞれ直流電圧Vbrkを印加する態様を以下に示す。
【0060】
図4(c)に示すように、各電磁ブレーキ21b〜26bの励磁コイル21c〜26cでは、いずれも周期T1で矩形パルス状の電圧を印加する(図では、電力として表示)。電磁ブレーキ21b,22bへの電圧印加ではDUTY60%であり、電磁ブレーキ23b〜26bへの電圧印加ではDUTY40%である。これらのDUTYは、各駆動軸の制動が解除された状態を維持することが可能な範囲で、最小のDUTYに定められたものである。また、矩形パルス状の電圧の制御周期は、電圧の非印加期間で電流が減少するときに、上記パッドが制動位置に到達しない範囲で定められている。
【0061】
なお、電磁ブレーキ21b,23b,24bへの電圧印加と、電磁ブレーキ22b,25b,26bへの電圧印加とでは、ON−OFFの論理が反転している。このため、同じ時期の周期において、電磁ブレーキ21b,23b,24bでは印加電圧の立ち上がりから開始するのに対して、電磁ブレーキ22b,25b,26bでは印加電圧の立ち下がりから開始する。
【0062】
電磁ブレーキ23b〜26bへの電圧印加のON期間の長さ(周期T1の40%)が、電磁ブレーキ21b,22bへの電圧印加のOFF期間の長さ(周期T1の40%)以下であるため、電磁ブレーキ21bへの電圧印加のOFF期間と電磁ブレーキ25b,26bへの電圧印加のON期間とを一致させるように制御する。すなわち、互いのON期間の長さの和が周期を超えない電磁ブレーキ同士で、一方の電磁ブレーキへの電圧印加のOFF期間に、他方の電磁ブレーキへの電圧印加のON期間が含まれるように制御する。換言すれば、互いのON期間の長さの和が周期を超えない電磁ブレーキ同士で、一方の電磁ブレーキへの電圧印加のON期間と他方の電磁ブレーキへの電圧印加のON期間とが互いに重複しないようにずらす。
【0063】
具体的には、電磁ブレーキ21b(第1電磁ブレーキ)と電磁ブレーキ25b,26b(第2電磁ブレーキ)とで、電圧印加のON期間が互いに重複しないようにずらす。このとき、定格電力が相対的に大きい第1電磁ブレーキ(電磁ブレーキ21b)の数を、定格電力が相対的に小さい第2電磁ブレーキ(電磁ブレーキ25b,26b)の数よりも少なくする。
【0064】
さらに、電磁ブレーキ25b,26bへの電圧印加のON期間の長さ(周期T1の40%)が、電磁ブレーキ23b,24bへの電圧印加のOFF期間の長さ(周期T1の60%)以下であるため、電磁ブレーキ23b,24bへの電圧印加のOFF期間に、電磁ブレーキ25b,26bへの電圧印加のON期間が含まれるように制御する。すなわち、電磁ブレーキ23b,24b(第1電磁ブレーキ)と電磁ブレーキ25b,26b(第2電磁ブレーキ)とで、電圧印加のON期間が互いに重複しないようにずらす。
【0065】
また、電圧印加のON期間及びOFF期間に関して、電磁ブレーキ22bと電磁ブレーキ23b,24bとの関係は、電磁ブレーキ21bと電磁ブレーキ25b,26bとの関係と同様である。すなわち、定格電力の最も大きい2つの電磁ブレーキ21b,22bをそれぞれ異なるグループに分け、各グループにおいて、互いのON期間の長さの和が周期を超えない電磁ブレーキ同士で、一方の電磁ブレーキ(第1電磁ブレーキ)への電圧印加のON期間と他方の電磁ブレーキ(第2電磁ブレーキ)への電圧印加のON期間とが互いに重複しないようにずらしている。例えば、第1グループでは、電磁ブレーキ21bが第1電磁ブレーキとなり、電磁ブレーキ25b,26bが第2電磁ブレーキとなる。第2グループでは、電磁ブレーキ22bが第1電磁ブレーキとなり、電磁ブレーキ23b,24bが第2電磁ブレーキとなる。このとき、重力の作用に抗して関節において駆動軸を駆動するモータ22の有する電磁ブレーキ22bが、定格電力が相対的に大きい第1電磁ブレーキとして採用されている。なお、電磁ブレーキ21bの定格電力と電磁ブレーキ22bの定格電力とが互いに異なっていてもよい。
【0066】
このような制御によれば、図4(d)に示すように(縦軸を1/2に縮小して表示)、各電磁ブレーキ21b〜26bの励磁コイル21c〜26cに供給する電力の合計を平均化することができる。このため、電力の合計が一時的に大きくなること、すなわち電力の合計の最大値が大きくなることを抑制することができる。
【0067】
ロボット10の動作停止に際しては、図4(a),(b)に示すように、ロボット10の制御装置により各モータ21〜26の駆動が停止されるとともに、各電磁ブレーキ21b〜26bによる駆動軸の制動を行う(各電磁ブレーキ21b〜26bへの電力供給をOFF)する。
【0068】
以上詳述した本実施形態は以下の利点を有する。
【0069】
・ロボット10の動作中には、各関節において駆動軸を駆動するモータ21〜26が有する非励磁作動型の電磁ブレーキ21b〜26bに電力が供給される。そして、電磁ブレーキ21b〜26bによる駆動軸の制動が解除された状態において、モータ21〜26が駆動されてロボット10の各関節における駆動軸の駆動が行われる。
【0070】
ここで、駆動軸の制動を解除する期間において、電磁ブレーキ21b〜26bの励磁コイル21c〜26cへの電圧印加を繰り返しON及びOFFするON−OFF制御(DUTY制御)が実行されつつ、駆動軸の制動が解除された状態が維持される。詳しくは、各モータ21〜26の駆動軸の制動を解除する期間において、各励磁コイル21c〜26cに印加される直流電圧VbrkがDUTY制御される。そして、このDUTY制御において、各駆動軸の制動が解除された状態を維持することのできるDUTYに制御される。このため、電磁ブレーキ21b〜26bの励磁コイル21c〜26cへ供給される電力を抑制することができ、励磁コイル21c〜26cを含む回路の通電による発熱を抑制することができる。その結果、モータ21〜26の温度上昇を抑制することができるため、モータ21〜26の駆動が制限される状況を減らして、ロボットの動作時間を長くすることができる。
【0071】
・電磁ブレーキとして定格電力の異なる複数の電磁ブレーキを含み、CPU30は、前記ON−OFF制御においてON期間とOFF期間とを周期的に繰返すものであり、ON期間とOFF期間との比率が電磁ブレーキ毎に予め定められている。具体的には、各励磁コイル21c〜26cに印加する直流電圧VbrkをDUTY制御し、電磁ブレーキ毎にDUTYを予め定めている。その結果、各電磁ブレーキ21b〜26bにおいて駆動軸の制動が解除された状態を維持する際に、ON−OFF制御におけるON期間とOFF期間との比率を、各電磁ブレーキ21b〜26bの特性(定格電力)や使用状況(制動負荷)に応じて適切に設定することができる。
【0072】
・さらに、上記DUTY制御において、各駆動軸の制動が解除された状態を維持することが可能な範囲で、取り得る最小のDUTYに定めている。すなわち、電圧印加のON期間とOFF期間との比率を、OFF期間の比率が最大となるように定めている。したがって、各電磁ブレーキ21b〜26bにおいて励磁コイル21c〜26cを含む回路の発熱を最小限に抑えつつ、駆動軸の制動が解除された状態を維持することができる。その結果、モータ21〜26の駆動が制限される状況を更に減らして、ロボットの動作時間を更に長くすることができる。
【0073】
・電磁ブレーキ21b(第1電磁ブレーキ)の励磁コイル21cと電磁ブレーキ25b,26b(第2電磁ブレーキ)の励磁コイル25c,26cとで、電圧印加のON期間が互いに重複しないようにずらされる。換言すれば、電磁ブレーキ21bへの電圧印加のOFF期間に、電磁ブレーキ25b,26bへの電圧印加のON期間が含まれるように制御される。このため、各電磁ブレーキ21b〜26bの励磁コイル21c〜26cに供給する電力の合計を平均化することができ、電力の合計の最大値が大きくなることを抑制することができる。したがって、共通のブレーキ用電源50から各電磁ブレーキ21b〜26bに電力が供給される構成において、ブレーキ用電源50に要求される最大電力を抑制することができるため、電源容量を小さくすることができる。
【0074】
・電磁ブレーキ21bの定格電力P1は電磁ブレーキ25b,26bの定格電力よりも大きく、電磁ブレーキ21bの数は1つであり、電磁ブレーキ25b,26bの合計数は2つである。このため、電磁ブレーキ21bよりも定格電力の小さい電磁ブレーキ25b,26bにおいて、励磁コイル25c,26cへの電圧印加のON期間が重複することとなる。そして、電磁ブレーキ21bの励磁コイル21cと電磁ブレーキ25b,26bの励磁コイル25c,26cとでは、電圧印加のON期間が互いに重複しないようにずらされている。したがって、複数の励磁コイルへの電圧印加のON期間が重複する場合に、電力の合計の最大値を抑制することができる。
【0075】
・CPU30は、電磁ブレーキ21b〜26bの励磁コイル21c〜26cに対して、上記ON−OFF制御を同一の周期T1で行っている。こうした構成によれば、電磁ブレーキ21b〜26bでそれぞれ1つのON期間を各周期T1において繰返すことによって、ON期間が互いに重複しないようにずらすことができる。したがって、ON期間が互いに重複しないようにずらすための複雑な制御が不要となる。
【0076】
・CPU30は、定格電力の最も大きい2つの電磁ブレーキ21b,22bをそれぞれ異なるグループの第1電磁ブレーキとし、各グループにおいて、第1電磁ブレーキの励磁コイルと第2電磁ブレーキの励磁コイルとで、電圧印加のON期間が互いに重複しないようにずらしている。こうした構成によれば、電磁ブレーキを有するモータの数が多い場合であっても、ブレーキ用電源50に要求される最大電力をグループ単位で抑制することができる。
【0077】
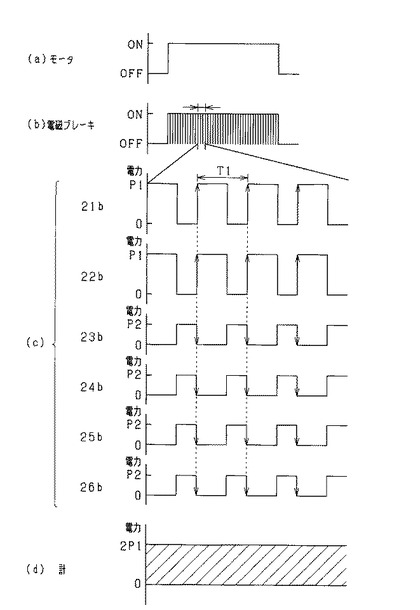
なお、上記第1実施形態は、各電磁ブレーキに供給される電力の制御態様を、以下のように変形して実施することもできる。ここでは、図4(c)に示される制御を変更している。
【0078】
図5(c)に示すように、電磁ブレーキ21b,22bへの電圧印加のOFF期間と電磁ブレーキ23b〜26bへの電圧印加のON期間とを一致させるように制御する。すなわち、電磁ブレーキ21b,22b(第1電磁ブレーキ)と電磁ブレーキ23b〜26b(第2電磁ブレーキ)とで、電圧印加のON期間が互いに重複しないようにずらす。このとき、定格電力が相対的に大きい第1電磁ブレーキ(電磁ブレーキ21b,22b)の数を、定格電力が相対的に小さい第2電磁ブレーキ(電磁ブレーキ23b〜26b)の数よりも少なくする。
【0079】
このような制御によっても、図5(d)に示すように(縦軸を1/2に縮小して表示)、各電磁ブレーキ21b〜26bの励磁コイル21c〜26cに供給する電力の合計を平均化することができる。
【0080】
なお、この場合、定格電力の最も大きい2つの電磁ブレーキ21b,22bをそれぞれ異なるグループの第1電磁ブレーキとし、各グループにおいて、第1電磁ブレーキの励磁コイルと第2電磁ブレーキの励磁コイルとで、電圧印加のON期間が互いに重複しないようにずらしていると考えることもできる。すなわち、第1グループでは、電磁ブレーキ21bが第1電磁ブレーキとなり、電磁ブレーキ23b,24bが第2電磁ブレーキとなる。第2グループでは、電磁ブレーキ22bが第1電磁ブレーキとなり、電磁ブレーキ25b,26bが第2電磁ブレーキとなる。
【0081】
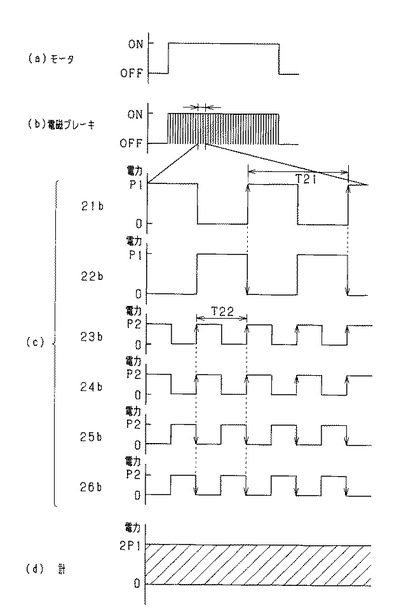
(第2実施形態)
本実施形態では、各電磁ブレーキに供給される電力の制御態様を、以下のように変形している。なお、その他の構成及び制御については、第1実施形態に準じている。
【0082】
図6(c)は、図4(c)に示される制御を変更したものである。同図に示すように、電磁ブレーキ21b,22bでは、周期T21で矩形パルス状の電圧を印加し(図では、電力として表示)、電磁ブレーキ23b〜26bでは、周期T22(T22=T21/2)で矩形パルス状の電圧を印加する。
【0083】
本実施形態では、各電磁ブレーキ21b〜26bの制動負荷が第1実施形態と異なっており、各電磁ブレーキ21b〜26bの励磁コイル21c〜26cに、いずれもDUTY50%で矩形パルス状の電圧を印加する。これらのDUTYは、各駆動軸の制動が解除された状態を維持することが可能な範囲で、最小のDUTYに定められたものである。また、パルスの周期T21,T22は、電圧の非印加期間で電流が減少するときに、上記パッドが制動位置に到達しない範囲で定められている。
【0084】
電磁ブレーキ22bへの電圧印加のON期間の長さ(周期T21の50%)が、電磁ブレーキ21bへの電圧印加のOFF期間の長さ(周期T21の50%)以下であるため、電磁ブレーキ21bへの電圧印加のOFF期間と電磁ブレーキ22bへの電圧印加のON期間とを一致させるように制御する。すなわち、電磁ブレーキ21b(第1電磁ブレーキ)と電磁ブレーキ22b(第2電磁ブレーキ)とで、電圧印加のON期間が互いに重複しないようにずらす。
【0085】
また、電磁ブレーキ25b,26bへの電圧印加のON期間の長さ(周期T22の50%)が、電磁ブレーキ23b,24bへの電圧印加のOFF期間の長さ(周期T22の50%)以下であるため、電磁ブレーキ23b,24bへの電圧印加のOFF期間と電磁ブレーキ25b,26bへの電圧印加のON期間とを一致させるように制御する。すなわち、電磁ブレーキ23b,24b(第1電磁ブレーキ)と電磁ブレーキ25b,26b(第2電磁ブレーキ)とで、電圧印加のON期間が互いに重複しないようにずらす。
【0086】
このように、複数の電磁ブレーキ21b〜26bにおいて互いに異なる周期で矩形パルス状の電圧を印加するものを含む場合に、同一の周期で矩形パルス状の電圧を印加する(同一の周期で電圧印加のON−OFF制御を行う)電磁ブレーキ同士で、ON期間が互いに重複しないようにずらす。このため、電磁ブレーキ21bと電磁ブレーキ22bとで、共にDUTY50%でON期間とOFF期間とが互いに反対の制御を周期的に繰返すことにより、ON期間が互いに重複しないようにずらすことができる。電磁ブレーキ23b,24bと電磁ブレーキ25b,26bとも同様である。
【0087】
このような制御によっても、図6(d)に示すように(縦軸を1/2に縮小して表示)、電磁ブレーキ21b〜26bの励磁コイル21c〜26cに供給する電力の合計を平均化することができる。
【0088】
なお、上記第2実施形態は、各電磁ブレーキに供給される電力の制御態様を、以下のように変形して実施することもできる。すなわち、電磁ブレーキ21b,22bでは、DUTY50%のままで矩形パルス状の電圧の周期T21をより短くしたとしても、電圧の非印加期間で電流が減少するときに、上記パッドが制動位置に到達することはない。したがって、電磁ブレーキ21b,22bに印加される矩形のパルス状の電圧の周期T21を、周期T22に変更してもよい。この場合には、第1実施形態に準じた利点を有するようになる。
【0089】
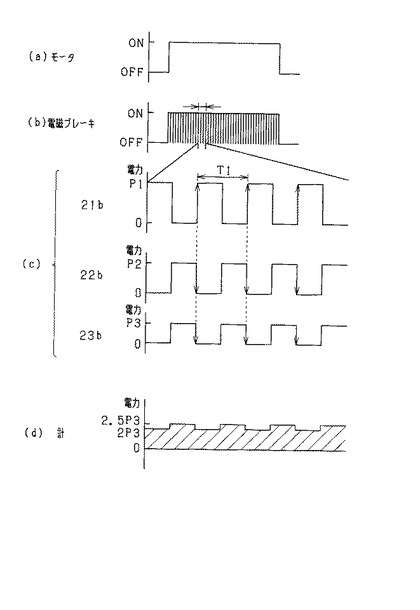
(第3実施形態)
本実施形態では、3軸のロボットを採用しており、ロボットは電磁ブレーキ21b〜23bをそれぞれ有するモータ21〜23を備えている。電磁ブレーキ21bの定格電力P1が最も大きく、電磁ブレーキ22bの定格電力P2が2番目に大きく、電磁ブレーキ23bの定格電力P3が最も小さい(P1=2×P3、P2=1.5×P3)。なお、その他の構成及び制御については、第1実施形態に準じている。
【0090】
図7(c)は、図4(c)に示される制御を変更したものである。同図に示すように、各電磁ブレーキ21b〜23bの励磁コイル21c〜23cでは、いずれも周期T1で矩形パルス状の電圧を印加する。
【0091】
本実施形態では、各電磁ブレーキ21b〜23bの励磁コイル21c〜23cに、いずれもDUTY50%で矩形パルス状の電圧を印加する。これらのDUTYは、各駆動軸の制動が解除された状態を維持することが可能な範囲で、最小のDUTYに定められたものである。また、パルスの周期T1は、電圧の非印加期間で電流が減少するときに、上記パッドが制動位置に到達しない範囲で定められている。
【0092】
定格電力の最も大きい電磁ブレーキ21b(第1電磁ブレーキ)と、定格電力の2番目に大きい電磁ブレーキ22b(第2電磁ブレーキ)とで、励磁コイルへの電圧印加のON期間が互いに重複しないようにずらす。このため、電力の合計が最も大きくなる2つの電磁ブレーキの組み合わせにおいて、電圧印加のON期間が互いに重複しないようにずらすことができる。
【0093】
そして、定格電力の最も小さい電磁ブレーキ23b(第3電磁ブレーキ)については、電磁ブレーキ21b,22bの少なくとも一方と電圧印加のON期間が互いに重複することとなる。このため、電磁ブレーキ21bと電磁ブレーキ23bとで電圧印加のON期間が互いに重複しないようにずらし、電磁ブレーキ22bと電磁ブレーキ23bとで電圧印加のON期間が互いに重複するようにする。したがって、電磁ブレーキ22bと電磁ブレーキ23bとで、電圧印加のON期間が互いに重複するものの、電磁ブレーキ21bと電磁ブレーキ23bとで、電圧印加のON期間が互いに重複する場合よりも、電力の合計の最大値を抑制することができる。
【0094】
このような制御によっても、図7(d)に示すように(縦軸を1/2に縮小して表示)、電磁ブレーキ21b〜23bの励磁コイル21c〜23cに供給する電力の合計を平均化することができる。
【0095】
上記各実施形態に限定されず、例えば次のように実施することもできる。
【0096】
・上記各実施形態では、電磁ブレーキの上記機械部分においてパッドとライニングとが確実に離間するように、各駆動軸の制動を解除する期間の初期(励磁コイルへの電圧印加の初期)において、所定期間にわたってDUTY100%(電圧の印加をON)とした。しかしながら、必ずしもDUTY100%に設定する必要はなく、各駆動軸の制動を確実に解除することのできるDUTY(ON期間とOFF期間との比率)に設定すればよい。具体的には、各駆動軸の制動が解除された状態を維持する際のDUTY(例えばDUTY50%)よりも高いDUTY、例えばDUTY80%に設定してもよい。また、各駆動軸の制動が解除された状態を維持する際のDUTYが、励磁コイルへの電圧印加の初期においてパッドとライニングとを離間させることのできるDUTY(例えば65%)に設定されていれば、励磁コイルへの電圧印加の初期からそのDUTYに設定してもよい。
【0097】
・上記第1及び第2実施形態では、ロボット10を6軸の垂直多関節型ロボットとして具体化したが、水平多関節型ロボットとして具体化することも可能である。また、3軸のロボット(又は3軸に電磁ブレーキを備えるロボット)である場合には、図4(c)において、電磁ブレーキ21b(第1電磁ブレーキ)と電磁ブレーキ25b,26b(第2電磁ブレーキ)とを採用した場合と同様のON−OFF制御を行い、4軸のロボットである場合には、図5(c)において、電磁ブレーキ21b(第1電磁ブレーキ)と電磁ブレーキ23b〜25b(第2電磁ブレーキ)とを採用した場合と同様のON−OFF制御を行うとよい。こうした構成によれば、第1電磁ブレーキよりも定格電力の小さい第2電磁ブレーキにおいて、励磁コイルへの電圧印加のON期間がより多く重複することとなる。したがって、複数の励磁コイルへの電圧印加のON期間が重複する場合に、電力の合計の最大値を抑制することができる。
【0098】
また、図4(c)において、3軸のロボットである場合に、電磁ブレーキ23b(第1電磁ブレーキ)と電磁ブレーキ25b,26b(第2電磁ブレーキ)とを採用した場合と同様のON−OFF制御や、4軸のロボットである場合に、電磁ブレーキ23b,24b(第1電磁ブレーキ)と電磁ブレーキ25b,26b(第2電磁ブレーキ)とを採用した場合と同様のON−OFF制御や、図6(c)において、4軸のロボットである場合に、電磁ブレーキ21b(第1電磁ブレーキ)及び電磁ブレーキ22b(第2電磁ブレーキ)、並びに電磁ブレーキ23b(第1電磁ブレーキ)及び電磁ブレーキ25b(第2電磁ブレーキ)を採用した場合と同様のON−OFF制御を行ってもよい。こうした構成によっても、第1電磁ブレーキの励磁コイルと第2電磁ブレーキの励磁コイルとで、電圧印加のON期間が互いに重複しないようにずらされる。したがって、共通の電源から各電磁ブレーキに電力が供給される構成において、電源に要求される最大電力を抑制することができるため、電源容量を小さくすることができる。
【0099】
・上記第1及び第2実施形態では、各電磁ブレーキ21b〜26bの励磁コイル21c〜26cへの電圧印加をスイッチングする半導体リレー51〜56を、各PG41〜46から発生されるパルス信号によって駆動した。しかしながら、複数の電磁ブレーキの励磁コイルに印加される矩形パルス状の電圧が同一である場合には、それぞれの励磁コイルに対応して設けられた半導体リレーを共通のPGから発生されるパルス信号によって駆動してもよい。例えば、図4(c)に示される矩形パルス状の電圧(図では電力として表示)が各電磁ブレーキ21b〜26bの励磁コイル21c〜26cに印加される場合には、電磁ブレーキ23b,24bに対応して設けられる半導体リレー53,54を共通のPG43により駆動し、電磁ブレーキ25b,26bに対応して設けられる半導体リレー55,56を共通のPG45により駆動することができる。また、図5(c)に示される矩形パルス状の電圧が各電磁ブレーキ21b〜26bの励磁コイル21c〜26cに印加される場合には、電磁ブレーキ21b,22bに対応して設けられる半導体リレー51,52を共通のPG41により駆動し、電磁ブレーキ23b〜26bに対応して設けられる半導体リレー53〜56を共通のPG43により駆動することができる。こうした構成によれば、PGの数を減らすことができるため、装置のコストを抑制することができる。さらに、この場合に、共通のPGにより駆動される半導体リレーを共通化することにより、装置のコストを更に抑制することができる。
【0100】
・上記各実施形態では、電圧印加のON−OFF制御においてDUTY(ON期間とOFF期間との合計のうちON期間の比率)を、各駆動軸の制動が解除された状態を維持することが可能な範囲で最小のDUTYに定めていたが、ロボット10の各軸J1〜J6の関節部分における動作状況等に応じて適宜それよりも大きいDUTYに設定してもよい。また、複数の電磁ブレーキ21b〜26bにおける上記最小のDUTYのうち、最も大きいDUTYで全ての電磁ブレーキ21b〜26bの励磁コイル21c〜26cへ電圧印加を行うようにしてもよい。こうした構成によれば、PG41〜46及び半導体リレー51〜56を全ての電磁ブレーキ21b〜26bで共通化することができる。この場合であっても、各電磁ブレーキ21b〜26bの励磁コイルへ21c〜26cへの電圧印加がON−OFF制御されつつ、各駆動軸の制動が解除された状態が維持される。このため、各電磁ブレーキ21b〜26bの励磁コイル21c〜26cへ供給される電力を抑制することができ、励磁コイル21c〜26cを含む回路の通電による発熱を抑制することができる。
【0101】
・発熱を抑制する必要性の高い(定格電力の大きい)電磁ブレーキ21b,22bに対して電圧印加のON−OFF制御を行い、発熱を抑制する必要性の低い(定格電力の小さい)電磁ブレーキ23b〜26bに対して、従来と同様の制御(電圧印加のON状態を維持する制御)を行うようにしてもよい。こうした構成によれば、発熱を抑制する必要性の低い電磁ブレーキ23b〜26bでは、励磁コイル23c〜26cへの電圧印加を行う回路として従来と同様のものを用いることができる。
【符号の説明】
【0102】
10…ロボット、21〜26…モータ(サーボモータ)、21b〜26b…電磁ブレーキ、21c〜26c…励磁コイル、30…CPU、41〜46…パルス発生器(PG)、51〜56…半導体リレー。
【技術分野】
【0001】
本発明は、ロボットのアーム等を駆動するサーボモータにおいて、そのサーボモータが有する非励磁作動型の電磁ブレーキを制御する装置に関する。
【背景技術】
【0002】
従来、多関節型ロボットの関節においてアームを駆動するサーボモータは、その駆動軸を制動するブレーキを有している。このブレーキには、フェールセーフとなるように、非励磁作動型の電磁ブレーキが用いられている(例えば、特許文献1参照)。ロボットの停止中は、電磁ブレーキの励磁コイルへの電流が遮断され、ばねの弾性力等に基づき電磁ブレーキによる駆動軸の制動が行われる。一方、ロボットの動作中は、電磁ブレーキの励磁コイルに電流が供給され、電磁ブレーキによる駆動軸の制動が解除される。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−307618号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、一般に上記サーボモータには、駆動軸の回転位置を検出するエンコーダが設けられている。このエンコーダは、所定パターンに形成された回転子の回転を光学的あるいは磁気的に検出して、そのパルス信号をIC等により処理している。
【0005】
ここで、ロボットの電磁ブレーキは、一般に一日の初めにおいてロボットの動作が開始される前に駆動軸の制動を解除した状態とされ、その日の終わりにおいてロボットの動作が終了されるまで駆動軸の制動を解除した状態で維持される。このため、電磁ブレーキの励磁コイルを含む回路では、通電による発熱が一日中継続されることとなる。サーボモータ及び電磁ブレーキの発熱によりエンコーダの温度が上昇すると、パルス信号を処理するIC等の動作が不安定となり、エンコーダによる回転位置の検出精度が低下するおそれがある。この対策として、エンコーダの温度がその許容温度を超えたとき又は超えると予測されるときに、サーボモータの駆動を制限してその駆動回路からの発熱を抑制するようにしている。
【0006】
しかしながら、サーボモータの駆動を制限した場合には、ロボットの動作時間が制限されることとなるため、電磁ブレーキの発熱対策としては未だ改善の余地を残すものとなっている。
【0007】
本発明は、こうした実情に鑑みてなされたものであり、多関節型ロボットのアーム等を駆動するサーボモータにおいて、そのサーボモータが有する非励磁作動型の電磁ブレーキの発熱を抑制することのできる電磁ブレーキ制御装置を提供することを主たる目的とするものである。
【課題を解決するための手段】
【0008】
本発明は、上記課題を解決するために、以下の手段を採用した。
【0009】
第1の発明は、多関節型ロボットの各関節に駆動軸を駆動するサーボモータが設けられ、その各サーボモータが有する非励磁作動型の電磁ブレーキによる前記駆動軸の制動を制御する装置であって、前記駆動軸の制動を解除する期間において、前記電磁ブレーキの励磁コイルへの電力供給を繰返しON及びOFFするON−OFF制御を実行しつつ、前記駆動軸の制動が解除された状態を維持する制動解除維持手段を備えることを特徴とする。
【0010】
上記構成によれば、多関節型ロボットの動作中には、各関節において駆動軸を駆動するサーボモータが有する非励磁作動型の電磁ブレーキに電力が供給される。そして、電磁ブレーキによる駆動軸の制動が解除された状態において、サーボモータが駆動されてロボットの各関節における駆動軸の駆動が行われる。
【0011】
ここで、電磁ブレーキによる駆動軸の制動が解除された状態を維持するためには、必ずしも励磁コイルへ電力を供給し続ける必要はないことが本願発明者らによって発見された。すなわち、励磁コイルへの電力供給を停止した後も、駆動軸の制動が解除された状態が一定期間維持されることが本願発明者らによって確認された。
【0012】
この点、上記構成によれば、駆動軸の制動を解除する期間において、電磁ブレーキの励磁コイルへの電力供給を繰り返しON及びOFFするON−OFF制御が実行されつつ、駆動軸の制動が解除された状態が維持される。このため、電磁ブレーキの励磁コイルへ供給される電力を抑制することができ、励磁コイルを含む回路の通電による発熱を抑制することができる。その結果、サーボモータの温度上昇を抑制することができるため、サーボモータの駆動が制限される状況を減らして、ロボットの動作時間を長くすることができる。
【0013】
なお、前記制動解除維持手段は、多関節型ロボットに設けられた複数の電磁ブレーキのうち、一部のみに対して電力供給のON−OFF制御を行ってもよいし、全てに対して電力供給のON−OFF制御を行ってもよい。すなわち、一般に多関節型ロボットの駆動軸を駆動するサーボモータではその駆動負荷がそれぞれ異なり、それに対応してサーボモータが有する電磁ブレーキの制動負荷もそれぞれ異なっている。このため、複数のサーボモータ及び電磁ブレーキには定格電力の異なるものが含まれており、この定格電力の差異に応じて通電による発熱量も異なる。したがって、発熱を抑制する必要性の高い(定格電力の大きい)電磁ブレーキに対して制動解除維持手段による電力供給のON−OFF制御を実行し、発熱を抑制する必要性の低い(定格電力の小さい)電磁ブレーキに対して、従来と同様の制御(電力供給のON状態を維持する制御)を実行するようにしてもよい。こうした構成によれば、発熱を抑制する必要性の低い電磁ブレーキでは、励磁コイルへの電力供給を行う回路として従来と同様のものを用いることができる。
【0014】
上記のように、一般に多関節型ロボットの複数の電磁ブレーキでは、制動負荷がそれぞれ異なるため、定格電力の異なるものが含まれている。その場合、前記制動解除維持手段による電力供給のON−OFF制御において、駆動軸の制動が解除された状態を維持するために必要な電力供給のON期間が電磁ブレーキによって異なったものとなる。
【0015】
この点、第2の発明では、第1の発明において、前記電磁ブレーキとして定格電力の異なる複数の電磁ブレーキを含み、前記制動解除維持手段は、前記ON−OFF制御においてON期間とOFF期間とを周期的に繰返すものであり、前記ON期間とOFF期間との比率が前記電磁ブレーキ毎に予め定められているといった構成を採用している。したがって、各電磁ブレーキにおいて駆動軸の制動が解除された状態を維持する際に、ON−OFF制御におけるON期間とOFF期間との比率を、各電磁ブレーキの特性(定格電力)や使用状況(制動負荷)に応じて適切に設定することができる。
【0016】
なお、複数の電磁ブレーキにおいて、ON−OFF制御の周期は、同一であってもよいし、異なっていてもよい。ON−OFF制御の周期が同一である場合には、制御周期を一定として、そのうちのON期間の割合(DUTY)を電磁ブレーキ毎に設定すればよい。また、ON−OFF制御の周期が異なる場合には、各電磁ブレーキの特性や使用状況に応じてON期間とOFF期間との長さを設定すればよい。
【0017】
一般に多関節ロボットでは、温度上昇を抑制するためにサーボモータの駆動を制限する場合には、温度上昇の大きいサーボモータだけではなく、全ての関節に設けられたサーボモータの駆動が制限され、ロボット全体の動作が停止される。また通常、ロボットのアーム等はカバーで覆われており、サーボモータや電磁ブレーキで温度上昇した空気の対流によって、カバー内部の全体の温度が上昇する。したがって、サーボモータの駆動が制限される状況を減らすためには、複数の電磁ブレーキ全体の発熱を抑制することが重要となる。
【0018】
この点、第3の発明では、第2の発明において、前記ON期間とOFF期間との比率は、各駆動軸の制動が解除された状態を維持することが可能な範囲でOFF期間の比率が最大である所定比率に予め定められている。すなわち、各励磁コイルへの電力供給のON−OFF制御において、可能な限りOFF期間が長くなるように設定されている。したがって、各電磁ブレーキにおいて励磁コイルを含む回路の発熱を最小限に抑えつつ、駆動軸の制動が解除された状態を維持することができる。その結果、サーボモータの駆動が制限される状況を更に減らして、ロボットの動作時間を更に長くすることができる。
【0019】
第4の発明では、第1乃至第3のいずれかの発明において、共通の電源から各電磁ブレーキに電力が供給されており、前記制動解除維持手段は、前記ON−OFF制御においてON期間とOFF期間とを周期的に繰返すものであり、第1電磁ブレーキの励磁コイルと第2電磁ブレーキの励磁コイルとで、電力供給のON期間が互いに重複しないようにずらすことを特徴とする。
【0020】
上記構成によれば、前記ON−OFF制御においてON期間とOFF期間とが周期的に繰返される。そして、第1電磁ブレーキの励磁コイルと第2電磁ブレーキの励磁コイルとで、電力供給のON期間が互いに重複しないようにずらされる。したがって、共通の電源から各電磁ブレーキに電力が供給される構成において、電源に要求される最大電力を抑制することができるため、電源容量を小さくすることができる。
【0021】
なお、少なくとも第1電磁ブレーキと第2電磁ブレーキとにおいて電力供給のON期間が互いに重複しなければよく、第1電磁ブレーキ又は第2電磁ブレーキと電力供給のON期間が重複する他の電磁ブレーキを含んでいてもよい。また、第1電磁ブレーキ及び第2電磁ブレーキは、単数であっても複数であってもよい。
【0022】
多間接型ロボットでは、電磁ブレーキを有するサーボモータの数が多くなるため、全ての電磁ブレーキにおいて励磁コイルへの電力供給のON期間が互いに重複しないようにすることは難しい。ここで、複数の励磁コイルへの電力供給のON期間が重複する場合、電源容量を小さくするためには電力の合計の最大値を抑制することが望ましい。
【0023】
この点、第5の発明では、第4の発明において、前記第1電磁ブレーキの定格電力は前記第2電磁ブレーキの定格電力よりも大きく、前記第1電磁ブレーキの数は前記第2電磁ブレーキの数よりも少ないといった構成を採用している。このため、第1電磁ブレーキよりも定格電力の小さい第2電磁ブレーキにおいて、励磁コイルへの電力供給のON期間がより多く重複することとなる。なお、第1電磁ブレーキの励磁コイルと第2電磁ブレーキの励磁コイルとでは、電力供給のON期間が互いに重複しないようにずらされている。したがって、複数の励磁コイルへの電力供給のON期間が重複する場合に、電力の合計の最大値を抑制することができる。
【0024】
具体的には、第6の発明のように、第4又は第5の発明において、前記制動解除維持手段は、前記第1電磁ブレーキの励磁コイルと前記第2電磁ブレーキの励磁コイルとで、前記ON−OFF制御を同一の周期で行うといった構成を採用することができる。こうした構成によれば、第1電磁ブレーキ及び第2電磁ブレーキでそれぞれ1つのON期間を各周期において繰返すことによって、ON期間が互いに重複しないようにずらすことができる。したがって、ON期間が互いに重複しないようにずらすための複雑な制御が不要となる。
【0025】
また、第7の発明のように、第4乃至第6のいずれかの発明において、前記制動解除維持手段は、定格電力の最も大きい2つの電磁ブレーキを、それぞれ異なるグループの前記第1電磁ブレーキとし、各グループにおいて、第1電磁ブレーキの励磁コイルと第2電磁ブレーキの励磁コイルとで、電力供給のON期間が互いに重複しないようにずらすといった構成を採用することができる。こうした構成によれば、電磁ブレーキを有するサーボモータの数が多い場合であっても、電源に要求される最大電力をグループ単位で抑制することができる。
【0026】
第8の発明では、第1乃至第3のいずれかの発明において、共通の電源から各電磁ブレーキに電力が供給されており、前記電磁ブレーキとして、定格電力の最も大きい第1電磁ブレーキと、定格電力の2番目に大きい第2電磁ブレーキと、その他の第3電磁ブレーキとを含み、前記制動解除維持手段は、前記ON−OFF制御においてON期間とOFF期間とを周期的に繰返すものであり、前記第1電磁ブレーキの励磁コイルと、前記第2電磁ブレーキ及び前記第3電磁ブレーキの励磁コイルとで、電力供給のON期間が互いに重複しないようにずらすことを特徴とする。
【0027】
上記構成によれば、前記ON−OFF制御においてON期間とOFF期間とが周期的に繰返される。そして、定格電力の最も大きい第1電磁ブレーキの励磁コイルと、定格電力の2番目に大きい第2電磁ブレーキの励磁コイルとで、電力供給のON期間が互いに重複しないようにずらされる。したがって、電力の合計が最も大きくなる2つの電磁ブレーキの組み合わせにおいて、電力供給のON期間が互いに重複しないようにずらすことができる。さらに、第1電磁ブレーキの励磁コイルと第3電磁ブレーキの励磁コイルとで、電力供給のON期間が互いに重複しないようにずらされる。このため、第2電磁ブレーキの励磁コイルと第3電磁ブレーキの励磁コイルとで、電力供給のON期間が互いに重複したとしても、第1電磁ブレーキの励磁コイルと第3電磁ブレーキの励磁コイルとで、電力供給のON期間が互いに重複する場合よりも、電力の合計の最大値を抑制することができる。
【図面の簡単な説明】
【0028】
【図1】ロボットの電磁ブレーキ制御装置の概要を示すブロック図。
【図2】ロボットの概要を示す正面図。
【図3】電磁ブレーキの励磁コイルへの印加電圧と電流とを示すタイムチャート。
【図4】第1実施形態の電磁ブレーキの制御態様を示すタイムチャート。
【図5】同実施形態の電磁ブレーキの制御態様の変形例を示すタイムチャート。
【図6】第2実施形態の電磁ブレーキの制御態様を示すタイムチャート。
【図7】第3実施形態の電磁ブレーキの制御態様を示すタイムチャート。
【発明を実施するための形態】
【0029】
(第1実施形態)
以下、垂直多関節型ロボットに具体化した第1実施形態について、図面を参照しつつ説明する。本実施形態のロボットは、例えば産業用ロボットとして機械組立工場などの組立システムにて用いられる。
【0030】
はじめに、ロボット10の概要を図2に基づいて説明する。同図に示すように、ロボット10は、回動中心軸線として第1軸J1、第2軸J2、第3軸J3、第4軸J4、第5軸J5、第6軸J6を有する6軸ロボットであり、これら各軸における各部の動作角度がそれぞれサーボモータ等からなる駆動源の駆動により調整されるものとなっている。サーボモータはいずれも正逆両方向の回転が可能であり、モータ駆動により原点位置を基準として各部が動作する。本実施形態では、第1軸J1が鉛直方向に延びるようにしてロボット10が床等のロボット設置箇所に設置されるものとしており、図1の上下方向が鉛直方向を示すとして以下説明する。
【0031】
ロボット10において、基台11は、床等に固定される固定部12と、その固定部12の上方に設けられる回動部13とを有しており、回動部13が第1軸J1を回動中心として水平方向に回動可能になっている。回動部13の上端部分には下アーム15が回動可能に連結されている。下アーム15は基本姿勢として鉛直方向に延びる向きに設けられ、その上端部には上アーム16が回動可能に連結されている。上アーム16は基本姿勢として水平方向に延びる向きに設けられている。
【0032】
下アーム15は、水平方向に延びる第2軸J2を回動中心として回動部13に対して回動可能になっており、所定の動作範囲内において時計回り方向又は反時計回り方向に回動動作する。また、上アーム16は、水平方向に延びる第3軸J3を回動中心として下アーム15に対して回動可能になっており、所定の動作範囲内において時計回り方向又は反時計回り方向に回動動作する。
【0033】
上アーム16は、基端側と先端側とで2つのアーム部に分割されて構成されており、基端側は第1上アーム16A、先端側は第2上アーム16Bとなっている。第1上アーム16Aは上述したとおり下アーム15に回動可能に連結されている。これに対し、第2上アーム16Bは、本上アーム16の長手方向に延びる第4軸J4を回動中心として第1上アーム16Aに対してねじり方向に回動可能になっている。
【0034】
上アーム16(詳しくは第2上アーム16B)の先端部には手首部17が設けられ、その手首部17には、ワークやツール等を取り付けるためのハンド部18が設けられている。手首部17は、水平方向に延びる第5軸J5を回動中心として第2上アーム16Bに対して回動可能になっている。また、ハンド部18は、その中心線である第6軸J6を回動中心としてねじり方向に回動可能になっている。
【0035】
ロボット10において各軸J1〜J6の関節部分には、それぞれ前段部材側にモータ(サーボモータ)21〜26が設けられている。そして、各関節部分において、前段部材に設けられたモータの駆動により、後段部材がそれぞれ回動動作する。なお、モータ21〜26の出力軸(駆動軸)の中心軸線がそれぞれ第1軸J1〜第6軸J6となっている。
【0036】
各モータは、その出力軸を制動する非励磁作動型の電磁ブレーキ21b〜26b(電磁ブレーキ21bのみ表示)と、出力軸の回転位置に応じたパルス信号を出力するエンコーダ21e〜26e(エンコーダ21eのみ表示)とを有している。各電磁ブレーキ21b〜26bは、ばねの弾性力に基づき駆動軸(モータの出力軸)の制動を行い、励磁コイルへの電力供給に基づき駆動軸の制動を解除する。各エンコーダ21e〜26eは、所定パターンに形成された回転子の回転を磁気的又は光学的に検出する検出素子と、その検出素子の信号を処理するICとを有している。電磁ブレーキ21b〜26b及びエンコーダ21e〜26eは、それぞれモータ21〜26に組み込まれており、モータ21〜26と一体化されている。すなわち、各モータ21〜26は、その回転駆動部とブレーキとエンコーダとを含むユニットとして構成されている。
【0037】
ここで、ロボット10の各関節部分において、各モータ21〜26が駆動軸を駆動する負荷はそれぞれ異なっている。すなわち、各モータ21〜26が回動動作させる部分の質量が大きいほど駆動負荷が大きくなり、また重力の作用に抗して各部を回動動作させる関節部分では駆動負荷が大きくなる。このため、各関節部分において駆動負荷に応じた定格電力のモータが採用されており、駆動負荷の大きい関節部分ほど定格電力の大きいモータが採用されている。具体的には、モータ21,22の定格電力は、モータ23〜26の定格電力よりも大きくなっている。そして、モータ21とモータ22の定格電力は互いに等しく、またモータ23〜26の定格電力は互いに等しくなっている。
【0038】
こうした駆動負荷の大きいモータほど、駆動軸を制動する制動負荷が大きいため、制動力の大きい電磁ブレーキ、すなわち定格電力の大きい電磁ブレーキが採用されている。具体的には、モータ21,22がそれぞれ有する電磁ブレーキ21b,22bの定格電力P1は、モータ23〜26がそれぞれ有する電磁ブレーキ23b〜26bの定格電力P2よりも大きくなっている(P1=2×P2)。例えば、定格電力P1は6Wであり、定格電力P2は3Wである。
【0039】
ロボット10の各部(モータ21〜26等)はそれぞれカバーで覆われており、塵や油等の異物が外部から侵入することが抑制されている。これらカバーの内部は互いに連通しており、この連通部に電気配線等が通されている。このため、各カバー間を空気が流出入可能となっている。
【0040】
次に、図1を参照して、このようなロボット10の複数の電磁ブレーキ21b〜26bを制御する装置について説明する。同図は、ロボット10の動作を統括して制御する装置のうち、電磁ブレーキを制御する装置を示したものである。なお、同図では、一部の電磁ブレーキ及びその電気回路等を省略して示している。
【0041】
電磁ブレーキ21b〜26bは、それぞれ励磁コイル21c〜26cを有している。各励磁コイル21c〜26cの一端は、それぞれ半導体リレー51〜56を介してブレーキ用電源50に接続され、その他端はそれぞれグランドに接続されている。ブレーキ用電源50は、24Vの直流電圧Vbrkを発生するものである。
【0042】
また、各電磁ブレーキ21b〜26bは、ばねの弾性力に基づきモータ21〜26の各出力軸を制動する機械部分を有している。各機械部分は、モータの出力軸を制動する摩擦力を互いの当接により発生するパッド及びライニング(摩擦部材)と、このパッドをライニングに当接させる方向に付勢するばねとを有している。パッド及びライニングは、各モータ21〜26のケース及び出力軸にそれぞれ取付けられている。ばねの付勢力によりパッドがライニングに押圧され、パッドとライニングとの間で摩擦力が発生する。この摩擦力によって、各モータ21〜26の駆動軸が制動される。
【0043】
これに対して、各励磁コイル21c〜26cへの直流電圧Vbrkの印加(電力の供給)に基づいて、上記ばねによる付勢力と反対方向の力、すなわち上記ライニングからパッドを離間させる方向の力が発生する。そして、ばねによる付勢力よりも、励磁コイルへの通電に基づく力が大きい場合に、各駆動軸の制動が解除される。
【0044】
また、パッドは所定の可動範囲内で移動し、可動範囲の一端が上記ライニングに当接する位置(制動位置)であり、その他端が制動位置から最も離れた位置である。このため、パッドが制動位置から離れている状態では、駆動軸を制動する力が発生しておらず、駆動軸の制動が解除された状態となる。
【0045】
各半導体リレー51〜56には、パルス発生器(PG)41〜46がそれぞれ接続されている。そして、各半導体リレー51〜56は、PG41〜46から発生されるON−OFFのパルス信号によってスイッチング駆動され、パルス信号のON期間で電気的な接続状態となり、パルス信号のOFF期間で電気的な遮断状態となる。各半導体リレー51〜56の接続状態において、ブレーキ用電源50から励磁コイル21c〜26cにそれぞれ直流電圧Vbrkが印加され、励磁コイル21c〜26cにそれぞれ電流が流れる。詳しくは、直流電圧Vbrkの印加期間において電流が増大し、直流電圧Vbrkの非印加期間において電流が減少する。この直流電圧の印加期間又は非印加期間がある程度長くなると、電流はそれぞれ一定値に収束することとなる。
【0046】
各PG41〜46が発生するパルス信号は、CPU30からの駆動信号に基づいてそれぞれ制御される。CPU30は、各PG41〜46が発生するパルス信号の周期、位相、ON期間とOFF期間との比率等を制御する。本実施形態では、CPU30は、各PG41〜46が発生するパルス信号の周期を一定とし、その周期のうちのON期間の割合(DUTY)を制御する。こうしてCPU30は、各励磁コイル21c〜26cに直流電圧Vbrkが印加される態様、ひいては各励磁コイル21c〜26cに流れる電流の状態を制御する。なお、CPU30には、各モータ21〜26が有するエンコーダ21e〜26eからの検出信号がそれぞれ入力される。そして、ロボット10の制御装置は、これらのエンコーダ21e〜26eからの検出信号に基づいて、各モータ21〜26の駆動軸の回転位置を制御する。
【0047】
こうした構成を備えるロボット10では、一日の初めにおいて動作(機械の組立作業等)を開始するに際して、各電磁ブレーキ21b〜26bによる駆動軸の制動を解除した状態とする。この各駆動軸の制動が解除された状態において、ロボット10の制御装置は各モータ21〜26を駆動して、各軸J1〜J6の関節部分における駆動軸の駆動を行う。一方、その日の終わりにおいてロボット10の動作を終了するに際して、各モータ21〜26の駆動を停止するとともに、各電磁ブレーキ21b〜26bによる駆動軸の制動を行う。
【0048】
ここで、各モータ21〜26及び各電磁ブレーキ21b〜26bの発熱によりエンコーダ21e〜26eの温度が上昇すると、各エンコーダ21e〜26eが有する検出素子やICの動作が不安定となり、モータ21〜26の出力軸の回転位置を検出する精度が低下するおそがある。その場合、エンコーダ21e〜26eからの検出信号に基づく各モータ21〜26の制御精度が低下し、ロボット10の動作が不正確になるおそれがある。この対策として、ロボット10の制御装置は、エンコーダ21e〜26eのいずれかの温度がその許容温度(95℃)を超えると、全てのモータ21〜26の駆動を停止してその駆動回路からの発熱を抑制する。
【0049】
すなわち、複数のモータ21〜26のうち、有しているエンコーダの温度が許容温度を超えているモータだけではなく、全ての関節部分に設けられたモータ21〜26の駆動を停止し、ロボット10全体の動作を停止する。ロボット10の動作を行うためには、基本的には全てのモータ21〜26を駆動する必要があるため、複数のモータ21〜26のうちの1つでも停止する必要がある場合には、ロボット10全体の動作を停止することとしている。
【0050】
また、ロボット10の各部はそれぞれカバーで覆われており、これらカバーの内部は互いに連通している。このため、モータ21〜26や電磁ブレーキ21b〜26bで温度上昇した空気は、これらカバーの内部を対流することとなり、カバー内部の全体の温度が上昇する。したがって、いずれのエンコーダも許容温度を超えないようにするためには、複数の電磁ブレーキ21b〜26b全体の発熱を抑制することが重要となる。なお、各エンコーダ21e〜26eの温度は、サーミスタ等により直接検出してもよいし、各モータ21〜26の駆動状況に基づいて予測してもよい。
【0051】
本実施形態では、各モータ21〜26が有する電磁ブレーキ21b〜26bの発熱をそれぞれ抑制すべく、各モータ21〜26の駆動軸の制動を解除する期間において、各励磁コイル21c〜26cへの直流電圧Vbrkの印加(電力の供給)を繰返しON及びOFFするON−OFF制御を実行しつつ、各関節部分において駆動軸の制動が解除された状態を維持する。詳しくは、各モータ21〜26の駆動軸の制動を解除する期間において、各励磁コイル21c〜26cに印加される直流電圧VbrkをDUTY制御する。そして、このDUTY制御において、各駆動軸の制動が解除された状態を維持することのできるDUTYに制御する。
【0052】
ここで、各励磁コイル21c〜26cへの電圧印加を停止すると、励磁コイル21c〜26cに流れる電流は時間の経過とともに減衰する。このため、電圧印加を停止してから短時間しか経過していない状態では、電流の大きさは0になっておらず、各励磁コイル21c〜26cへの通電に基づく力もある程度残っている。したがって、各電磁ブレーキ21b〜26bの機械部分において上記パッドとライニングとが離れている状態、すなわち駆動軸の制動が解除された状態が短時間であれば維持されている。そして、パッドがライニングに当接する位置(制動位置)に到達する前に、各励磁コイル21c〜26cへの電圧印加を再開することにより、パッドを制動位置から離れる側へ移動させることができる。
【0053】
図3に、電磁ブレーキの励磁コイルへの印加電圧と電流との時間的変化の一例を示す。なお、この例では、電磁ブレーキの上記機械部分においてパッドとライニングとが確実に離間するように、励磁コイルへの電圧印加の初期において、所定期間にわたってDUTY100%(電圧の印加をON)としている。これにより、パッド及びライニングの駆動を開始する際に、これらに作用する最大静止摩擦力を超える力を確実に発生させることができる。
【0054】
同図に示すように、周期0.1msにおいて、0〜1.0msまでDUTY100%で電圧を励磁コイルに印加し、その後にDUTY50%の矩形パルス状の電圧を励磁コイルに印加する。これにより、励磁コイルに流れる電流は、0〜1.0msの期間において0mAから430mA付近まで急激に増大し、電磁ブレーキのパッドは制動位置から最も離れた位置まで確実に移動する。そして、励磁コイルに流れる電流は、その後の期間において電圧の印加期間で増大して非印加期間で減少することを繰返しながら次第に小さくなる。そして、電圧の印加開始から約2.0msで電流値がそれ以上減少しなくなり、以後は250mA付近で増大と減少とを繰返す。
【0055】
このとき、250mA付近において電流が増大した状態では、電磁ブレーキのパッドは制動位置から最も離れた位置で維持されている。そして、この状態から電流が減少すると、励磁コイルへの通電に基づく力が、ばねの付勢力よりも小さくなった時点で、パッドが制動位置側へ移動し始める。しかし、パッドが制動位置に到達する前に励磁コイルへの電圧印加が再開され、電流が増大することによりパッドが制動位置から離れる側へ移動又は押圧されることとなる。
【0056】
一方、こうしたパルス制御においてDUTYが小さ過ぎると、電圧の非印加期間で電流が減少するときに、パッドが制動位置に到達して駆動軸が制動されることとなる。そして、電圧の印加期間で電流が増大しても、パッドが制動位置から離れる側に移動せず、駆動軸の制動を解除することができない。また、パルスの周期が長過ぎると、電圧の非印加期間で電流が減少するときに、パッドが制動位置に到達して駆動軸が制動されることとなる。これらを踏まえて、パルスの周期及びDUTYを適切に設定することにより、励磁コイルに印加される直流電圧VbrkをON−OFF制御(DUTY制御)しつつ、駆動軸の制動が解除された状態を維持することができる。
【0057】
また、各電磁ブレーキの定格電力(特性)や制動負荷(使用状況)によって、各駆動軸の制動が解除された状態を維持することのできるDUTYは異なったものとなる。そこで、本実施形態では、励磁コイルに印加する直流電圧VbrkのON−OFF制御において、電磁ブレーキ毎にDUTYを予め定めている。具体的には、各駆動軸の制動が解除された状態を維持することが可能な範囲で、取り得る最小のDUTYに定めている。すなわち、電圧印加のON期間とOFF期間との比率を、OFF期間の比率が最大となるように定めている。なお、このようなDUTYは、予め実験やシミュレーション等に基づいて定めることができる。
【0058】
図4に、各電磁ブレーキに供給される電力(本実施形態では、印加される電圧)の制御態様を示す。この制御は、上記CPU30(制動解除維持手段)によって、各PG41〜46の発生するパルス信号を制御することにより実行される。なお、図4(a)は、ロボット10のモータ21〜26の動作状態を示しており、図4(b)は、電磁ブレーキ21b〜26bの動作状態を示しており、図4(c)は、図4(b)の一部の期間を拡大して、各電磁ブレーキ21b〜26bの励磁コイル21c〜26cにそれぞれ供給する電力を簡略化して示しており、図4(d)は、図4(c)の各電磁ブレーキ21b〜26bの励磁コイル21c〜26cに供給する電力の合計を簡略化して示している。図4(c),(d)では、電力の波形を簡略化して矩形波として示しているが、実際には電流の減衰があるため、電力の波形は矩形波がくずれた形となる。
【0059】
図4(a),(b)に示すように、各電磁ブレーキ21b〜26bによる駆動軸の制動を解除(各電磁ブレーキ21b〜26bへの電力供給をON)するとともに、ロボット10の制御装置により各モータ21〜26の駆動が開始される。各電磁ブレーキ21b〜26bでは、各駆動軸の制動を解除する期間(ロボット10の動作期間)において、その初期に各駆動軸の制動を確実に解除した後、各駆動軸の制動が解除された状態を維持することのできるON期間とOFF期間との比率で、各励磁コイル21c〜26cに印加する直流電圧VbrkをそれぞれON−OFF制御(DUTY制御)する。各電磁ブレーキ21b〜26bにおいて、励磁コイル21c〜26cにそれぞれ直流電圧Vbrkを印加する態様を以下に示す。
【0060】
図4(c)に示すように、各電磁ブレーキ21b〜26bの励磁コイル21c〜26cでは、いずれも周期T1で矩形パルス状の電圧を印加する(図では、電力として表示)。電磁ブレーキ21b,22bへの電圧印加ではDUTY60%であり、電磁ブレーキ23b〜26bへの電圧印加ではDUTY40%である。これらのDUTYは、各駆動軸の制動が解除された状態を維持することが可能な範囲で、最小のDUTYに定められたものである。また、矩形パルス状の電圧の制御周期は、電圧の非印加期間で電流が減少するときに、上記パッドが制動位置に到達しない範囲で定められている。
【0061】
なお、電磁ブレーキ21b,23b,24bへの電圧印加と、電磁ブレーキ22b,25b,26bへの電圧印加とでは、ON−OFFの論理が反転している。このため、同じ時期の周期において、電磁ブレーキ21b,23b,24bでは印加電圧の立ち上がりから開始するのに対して、電磁ブレーキ22b,25b,26bでは印加電圧の立ち下がりから開始する。
【0062】
電磁ブレーキ23b〜26bへの電圧印加のON期間の長さ(周期T1の40%)が、電磁ブレーキ21b,22bへの電圧印加のOFF期間の長さ(周期T1の40%)以下であるため、電磁ブレーキ21bへの電圧印加のOFF期間と電磁ブレーキ25b,26bへの電圧印加のON期間とを一致させるように制御する。すなわち、互いのON期間の長さの和が周期を超えない電磁ブレーキ同士で、一方の電磁ブレーキへの電圧印加のOFF期間に、他方の電磁ブレーキへの電圧印加のON期間が含まれるように制御する。換言すれば、互いのON期間の長さの和が周期を超えない電磁ブレーキ同士で、一方の電磁ブレーキへの電圧印加のON期間と他方の電磁ブレーキへの電圧印加のON期間とが互いに重複しないようにずらす。
【0063】
具体的には、電磁ブレーキ21b(第1電磁ブレーキ)と電磁ブレーキ25b,26b(第2電磁ブレーキ)とで、電圧印加のON期間が互いに重複しないようにずらす。このとき、定格電力が相対的に大きい第1電磁ブレーキ(電磁ブレーキ21b)の数を、定格電力が相対的に小さい第2電磁ブレーキ(電磁ブレーキ25b,26b)の数よりも少なくする。
【0064】
さらに、電磁ブレーキ25b,26bへの電圧印加のON期間の長さ(周期T1の40%)が、電磁ブレーキ23b,24bへの電圧印加のOFF期間の長さ(周期T1の60%)以下であるため、電磁ブレーキ23b,24bへの電圧印加のOFF期間に、電磁ブレーキ25b,26bへの電圧印加のON期間が含まれるように制御する。すなわち、電磁ブレーキ23b,24b(第1電磁ブレーキ)と電磁ブレーキ25b,26b(第2電磁ブレーキ)とで、電圧印加のON期間が互いに重複しないようにずらす。
【0065】
また、電圧印加のON期間及びOFF期間に関して、電磁ブレーキ22bと電磁ブレーキ23b,24bとの関係は、電磁ブレーキ21bと電磁ブレーキ25b,26bとの関係と同様である。すなわち、定格電力の最も大きい2つの電磁ブレーキ21b,22bをそれぞれ異なるグループに分け、各グループにおいて、互いのON期間の長さの和が周期を超えない電磁ブレーキ同士で、一方の電磁ブレーキ(第1電磁ブレーキ)への電圧印加のON期間と他方の電磁ブレーキ(第2電磁ブレーキ)への電圧印加のON期間とが互いに重複しないようにずらしている。例えば、第1グループでは、電磁ブレーキ21bが第1電磁ブレーキとなり、電磁ブレーキ25b,26bが第2電磁ブレーキとなる。第2グループでは、電磁ブレーキ22bが第1電磁ブレーキとなり、電磁ブレーキ23b,24bが第2電磁ブレーキとなる。このとき、重力の作用に抗して関節において駆動軸を駆動するモータ22の有する電磁ブレーキ22bが、定格電力が相対的に大きい第1電磁ブレーキとして採用されている。なお、電磁ブレーキ21bの定格電力と電磁ブレーキ22bの定格電力とが互いに異なっていてもよい。
【0066】
このような制御によれば、図4(d)に示すように(縦軸を1/2に縮小して表示)、各電磁ブレーキ21b〜26bの励磁コイル21c〜26cに供給する電力の合計を平均化することができる。このため、電力の合計が一時的に大きくなること、すなわち電力の合計の最大値が大きくなることを抑制することができる。
【0067】
ロボット10の動作停止に際しては、図4(a),(b)に示すように、ロボット10の制御装置により各モータ21〜26の駆動が停止されるとともに、各電磁ブレーキ21b〜26bによる駆動軸の制動を行う(各電磁ブレーキ21b〜26bへの電力供給をOFF)する。
【0068】
以上詳述した本実施形態は以下の利点を有する。
【0069】
・ロボット10の動作中には、各関節において駆動軸を駆動するモータ21〜26が有する非励磁作動型の電磁ブレーキ21b〜26bに電力が供給される。そして、電磁ブレーキ21b〜26bによる駆動軸の制動が解除された状態において、モータ21〜26が駆動されてロボット10の各関節における駆動軸の駆動が行われる。
【0070】
ここで、駆動軸の制動を解除する期間において、電磁ブレーキ21b〜26bの励磁コイル21c〜26cへの電圧印加を繰り返しON及びOFFするON−OFF制御(DUTY制御)が実行されつつ、駆動軸の制動が解除された状態が維持される。詳しくは、各モータ21〜26の駆動軸の制動を解除する期間において、各励磁コイル21c〜26cに印加される直流電圧VbrkがDUTY制御される。そして、このDUTY制御において、各駆動軸の制動が解除された状態を維持することのできるDUTYに制御される。このため、電磁ブレーキ21b〜26bの励磁コイル21c〜26cへ供給される電力を抑制することができ、励磁コイル21c〜26cを含む回路の通電による発熱を抑制することができる。その結果、モータ21〜26の温度上昇を抑制することができるため、モータ21〜26の駆動が制限される状況を減らして、ロボットの動作時間を長くすることができる。
【0071】
・電磁ブレーキとして定格電力の異なる複数の電磁ブレーキを含み、CPU30は、前記ON−OFF制御においてON期間とOFF期間とを周期的に繰返すものであり、ON期間とOFF期間との比率が電磁ブレーキ毎に予め定められている。具体的には、各励磁コイル21c〜26cに印加する直流電圧VbrkをDUTY制御し、電磁ブレーキ毎にDUTYを予め定めている。その結果、各電磁ブレーキ21b〜26bにおいて駆動軸の制動が解除された状態を維持する際に、ON−OFF制御におけるON期間とOFF期間との比率を、各電磁ブレーキ21b〜26bの特性(定格電力)や使用状況(制動負荷)に応じて適切に設定することができる。
【0072】
・さらに、上記DUTY制御において、各駆動軸の制動が解除された状態を維持することが可能な範囲で、取り得る最小のDUTYに定めている。すなわち、電圧印加のON期間とOFF期間との比率を、OFF期間の比率が最大となるように定めている。したがって、各電磁ブレーキ21b〜26bにおいて励磁コイル21c〜26cを含む回路の発熱を最小限に抑えつつ、駆動軸の制動が解除された状態を維持することができる。その結果、モータ21〜26の駆動が制限される状況を更に減らして、ロボットの動作時間を更に長くすることができる。
【0073】
・電磁ブレーキ21b(第1電磁ブレーキ)の励磁コイル21cと電磁ブレーキ25b,26b(第2電磁ブレーキ)の励磁コイル25c,26cとで、電圧印加のON期間が互いに重複しないようにずらされる。換言すれば、電磁ブレーキ21bへの電圧印加のOFF期間に、電磁ブレーキ25b,26bへの電圧印加のON期間が含まれるように制御される。このため、各電磁ブレーキ21b〜26bの励磁コイル21c〜26cに供給する電力の合計を平均化することができ、電力の合計の最大値が大きくなることを抑制することができる。したがって、共通のブレーキ用電源50から各電磁ブレーキ21b〜26bに電力が供給される構成において、ブレーキ用電源50に要求される最大電力を抑制することができるため、電源容量を小さくすることができる。
【0074】
・電磁ブレーキ21bの定格電力P1は電磁ブレーキ25b,26bの定格電力よりも大きく、電磁ブレーキ21bの数は1つであり、電磁ブレーキ25b,26bの合計数は2つである。このため、電磁ブレーキ21bよりも定格電力の小さい電磁ブレーキ25b,26bにおいて、励磁コイル25c,26cへの電圧印加のON期間が重複することとなる。そして、電磁ブレーキ21bの励磁コイル21cと電磁ブレーキ25b,26bの励磁コイル25c,26cとでは、電圧印加のON期間が互いに重複しないようにずらされている。したがって、複数の励磁コイルへの電圧印加のON期間が重複する場合に、電力の合計の最大値を抑制することができる。
【0075】
・CPU30は、電磁ブレーキ21b〜26bの励磁コイル21c〜26cに対して、上記ON−OFF制御を同一の周期T1で行っている。こうした構成によれば、電磁ブレーキ21b〜26bでそれぞれ1つのON期間を各周期T1において繰返すことによって、ON期間が互いに重複しないようにずらすことができる。したがって、ON期間が互いに重複しないようにずらすための複雑な制御が不要となる。
【0076】
・CPU30は、定格電力の最も大きい2つの電磁ブレーキ21b,22bをそれぞれ異なるグループの第1電磁ブレーキとし、各グループにおいて、第1電磁ブレーキの励磁コイルと第2電磁ブレーキの励磁コイルとで、電圧印加のON期間が互いに重複しないようにずらしている。こうした構成によれば、電磁ブレーキを有するモータの数が多い場合であっても、ブレーキ用電源50に要求される最大電力をグループ単位で抑制することができる。
【0077】
なお、上記第1実施形態は、各電磁ブレーキに供給される電力の制御態様を、以下のように変形して実施することもできる。ここでは、図4(c)に示される制御を変更している。
【0078】
図5(c)に示すように、電磁ブレーキ21b,22bへの電圧印加のOFF期間と電磁ブレーキ23b〜26bへの電圧印加のON期間とを一致させるように制御する。すなわち、電磁ブレーキ21b,22b(第1電磁ブレーキ)と電磁ブレーキ23b〜26b(第2電磁ブレーキ)とで、電圧印加のON期間が互いに重複しないようにずらす。このとき、定格電力が相対的に大きい第1電磁ブレーキ(電磁ブレーキ21b,22b)の数を、定格電力が相対的に小さい第2電磁ブレーキ(電磁ブレーキ23b〜26b)の数よりも少なくする。
【0079】
このような制御によっても、図5(d)に示すように(縦軸を1/2に縮小して表示)、各電磁ブレーキ21b〜26bの励磁コイル21c〜26cに供給する電力の合計を平均化することができる。
【0080】
なお、この場合、定格電力の最も大きい2つの電磁ブレーキ21b,22bをそれぞれ異なるグループの第1電磁ブレーキとし、各グループにおいて、第1電磁ブレーキの励磁コイルと第2電磁ブレーキの励磁コイルとで、電圧印加のON期間が互いに重複しないようにずらしていると考えることもできる。すなわち、第1グループでは、電磁ブレーキ21bが第1電磁ブレーキとなり、電磁ブレーキ23b,24bが第2電磁ブレーキとなる。第2グループでは、電磁ブレーキ22bが第1電磁ブレーキとなり、電磁ブレーキ25b,26bが第2電磁ブレーキとなる。
【0081】
(第2実施形態)
本実施形態では、各電磁ブレーキに供給される電力の制御態様を、以下のように変形している。なお、その他の構成及び制御については、第1実施形態に準じている。
【0082】
図6(c)は、図4(c)に示される制御を変更したものである。同図に示すように、電磁ブレーキ21b,22bでは、周期T21で矩形パルス状の電圧を印加し(図では、電力として表示)、電磁ブレーキ23b〜26bでは、周期T22(T22=T21/2)で矩形パルス状の電圧を印加する。
【0083】
本実施形態では、各電磁ブレーキ21b〜26bの制動負荷が第1実施形態と異なっており、各電磁ブレーキ21b〜26bの励磁コイル21c〜26cに、いずれもDUTY50%で矩形パルス状の電圧を印加する。これらのDUTYは、各駆動軸の制動が解除された状態を維持することが可能な範囲で、最小のDUTYに定められたものである。また、パルスの周期T21,T22は、電圧の非印加期間で電流が減少するときに、上記パッドが制動位置に到達しない範囲で定められている。
【0084】
電磁ブレーキ22bへの電圧印加のON期間の長さ(周期T21の50%)が、電磁ブレーキ21bへの電圧印加のOFF期間の長さ(周期T21の50%)以下であるため、電磁ブレーキ21bへの電圧印加のOFF期間と電磁ブレーキ22bへの電圧印加のON期間とを一致させるように制御する。すなわち、電磁ブレーキ21b(第1電磁ブレーキ)と電磁ブレーキ22b(第2電磁ブレーキ)とで、電圧印加のON期間が互いに重複しないようにずらす。
【0085】
また、電磁ブレーキ25b,26bへの電圧印加のON期間の長さ(周期T22の50%)が、電磁ブレーキ23b,24bへの電圧印加のOFF期間の長さ(周期T22の50%)以下であるため、電磁ブレーキ23b,24bへの電圧印加のOFF期間と電磁ブレーキ25b,26bへの電圧印加のON期間とを一致させるように制御する。すなわち、電磁ブレーキ23b,24b(第1電磁ブレーキ)と電磁ブレーキ25b,26b(第2電磁ブレーキ)とで、電圧印加のON期間が互いに重複しないようにずらす。
【0086】
このように、複数の電磁ブレーキ21b〜26bにおいて互いに異なる周期で矩形パルス状の電圧を印加するものを含む場合に、同一の周期で矩形パルス状の電圧を印加する(同一の周期で電圧印加のON−OFF制御を行う)電磁ブレーキ同士で、ON期間が互いに重複しないようにずらす。このため、電磁ブレーキ21bと電磁ブレーキ22bとで、共にDUTY50%でON期間とOFF期間とが互いに反対の制御を周期的に繰返すことにより、ON期間が互いに重複しないようにずらすことができる。電磁ブレーキ23b,24bと電磁ブレーキ25b,26bとも同様である。
【0087】
このような制御によっても、図6(d)に示すように(縦軸を1/2に縮小して表示)、電磁ブレーキ21b〜26bの励磁コイル21c〜26cに供給する電力の合計を平均化することができる。
【0088】
なお、上記第2実施形態は、各電磁ブレーキに供給される電力の制御態様を、以下のように変形して実施することもできる。すなわち、電磁ブレーキ21b,22bでは、DUTY50%のままで矩形パルス状の電圧の周期T21をより短くしたとしても、電圧の非印加期間で電流が減少するときに、上記パッドが制動位置に到達することはない。したがって、電磁ブレーキ21b,22bに印加される矩形のパルス状の電圧の周期T21を、周期T22に変更してもよい。この場合には、第1実施形態に準じた利点を有するようになる。
【0089】
(第3実施形態)
本実施形態では、3軸のロボットを採用しており、ロボットは電磁ブレーキ21b〜23bをそれぞれ有するモータ21〜23を備えている。電磁ブレーキ21bの定格電力P1が最も大きく、電磁ブレーキ22bの定格電力P2が2番目に大きく、電磁ブレーキ23bの定格電力P3が最も小さい(P1=2×P3、P2=1.5×P3)。なお、その他の構成及び制御については、第1実施形態に準じている。
【0090】
図7(c)は、図4(c)に示される制御を変更したものである。同図に示すように、各電磁ブレーキ21b〜23bの励磁コイル21c〜23cでは、いずれも周期T1で矩形パルス状の電圧を印加する。
【0091】
本実施形態では、各電磁ブレーキ21b〜23bの励磁コイル21c〜23cに、いずれもDUTY50%で矩形パルス状の電圧を印加する。これらのDUTYは、各駆動軸の制動が解除された状態を維持することが可能な範囲で、最小のDUTYに定められたものである。また、パルスの周期T1は、電圧の非印加期間で電流が減少するときに、上記パッドが制動位置に到達しない範囲で定められている。
【0092】
定格電力の最も大きい電磁ブレーキ21b(第1電磁ブレーキ)と、定格電力の2番目に大きい電磁ブレーキ22b(第2電磁ブレーキ)とで、励磁コイルへの電圧印加のON期間が互いに重複しないようにずらす。このため、電力の合計が最も大きくなる2つの電磁ブレーキの組み合わせにおいて、電圧印加のON期間が互いに重複しないようにずらすことができる。
【0093】
そして、定格電力の最も小さい電磁ブレーキ23b(第3電磁ブレーキ)については、電磁ブレーキ21b,22bの少なくとも一方と電圧印加のON期間が互いに重複することとなる。このため、電磁ブレーキ21bと電磁ブレーキ23bとで電圧印加のON期間が互いに重複しないようにずらし、電磁ブレーキ22bと電磁ブレーキ23bとで電圧印加のON期間が互いに重複するようにする。したがって、電磁ブレーキ22bと電磁ブレーキ23bとで、電圧印加のON期間が互いに重複するものの、電磁ブレーキ21bと電磁ブレーキ23bとで、電圧印加のON期間が互いに重複する場合よりも、電力の合計の最大値を抑制することができる。
【0094】
このような制御によっても、図7(d)に示すように(縦軸を1/2に縮小して表示)、電磁ブレーキ21b〜23bの励磁コイル21c〜23cに供給する電力の合計を平均化することができる。
【0095】
上記各実施形態に限定されず、例えば次のように実施することもできる。
【0096】
・上記各実施形態では、電磁ブレーキの上記機械部分においてパッドとライニングとが確実に離間するように、各駆動軸の制動を解除する期間の初期(励磁コイルへの電圧印加の初期)において、所定期間にわたってDUTY100%(電圧の印加をON)とした。しかしながら、必ずしもDUTY100%に設定する必要はなく、各駆動軸の制動を確実に解除することのできるDUTY(ON期間とOFF期間との比率)に設定すればよい。具体的には、各駆動軸の制動が解除された状態を維持する際のDUTY(例えばDUTY50%)よりも高いDUTY、例えばDUTY80%に設定してもよい。また、各駆動軸の制動が解除された状態を維持する際のDUTYが、励磁コイルへの電圧印加の初期においてパッドとライニングとを離間させることのできるDUTY(例えば65%)に設定されていれば、励磁コイルへの電圧印加の初期からそのDUTYに設定してもよい。
【0097】
・上記第1及び第2実施形態では、ロボット10を6軸の垂直多関節型ロボットとして具体化したが、水平多関節型ロボットとして具体化することも可能である。また、3軸のロボット(又は3軸に電磁ブレーキを備えるロボット)である場合には、図4(c)において、電磁ブレーキ21b(第1電磁ブレーキ)と電磁ブレーキ25b,26b(第2電磁ブレーキ)とを採用した場合と同様のON−OFF制御を行い、4軸のロボットである場合には、図5(c)において、電磁ブレーキ21b(第1電磁ブレーキ)と電磁ブレーキ23b〜25b(第2電磁ブレーキ)とを採用した場合と同様のON−OFF制御を行うとよい。こうした構成によれば、第1電磁ブレーキよりも定格電力の小さい第2電磁ブレーキにおいて、励磁コイルへの電圧印加のON期間がより多く重複することとなる。したがって、複数の励磁コイルへの電圧印加のON期間が重複する場合に、電力の合計の最大値を抑制することができる。
【0098】
また、図4(c)において、3軸のロボットである場合に、電磁ブレーキ23b(第1電磁ブレーキ)と電磁ブレーキ25b,26b(第2電磁ブレーキ)とを採用した場合と同様のON−OFF制御や、4軸のロボットである場合に、電磁ブレーキ23b,24b(第1電磁ブレーキ)と電磁ブレーキ25b,26b(第2電磁ブレーキ)とを採用した場合と同様のON−OFF制御や、図6(c)において、4軸のロボットである場合に、電磁ブレーキ21b(第1電磁ブレーキ)及び電磁ブレーキ22b(第2電磁ブレーキ)、並びに電磁ブレーキ23b(第1電磁ブレーキ)及び電磁ブレーキ25b(第2電磁ブレーキ)を採用した場合と同様のON−OFF制御を行ってもよい。こうした構成によっても、第1電磁ブレーキの励磁コイルと第2電磁ブレーキの励磁コイルとで、電圧印加のON期間が互いに重複しないようにずらされる。したがって、共通の電源から各電磁ブレーキに電力が供給される構成において、電源に要求される最大電力を抑制することができるため、電源容量を小さくすることができる。
【0099】
・上記第1及び第2実施形態では、各電磁ブレーキ21b〜26bの励磁コイル21c〜26cへの電圧印加をスイッチングする半導体リレー51〜56を、各PG41〜46から発生されるパルス信号によって駆動した。しかしながら、複数の電磁ブレーキの励磁コイルに印加される矩形パルス状の電圧が同一である場合には、それぞれの励磁コイルに対応して設けられた半導体リレーを共通のPGから発生されるパルス信号によって駆動してもよい。例えば、図4(c)に示される矩形パルス状の電圧(図では電力として表示)が各電磁ブレーキ21b〜26bの励磁コイル21c〜26cに印加される場合には、電磁ブレーキ23b,24bに対応して設けられる半導体リレー53,54を共通のPG43により駆動し、電磁ブレーキ25b,26bに対応して設けられる半導体リレー55,56を共通のPG45により駆動することができる。また、図5(c)に示される矩形パルス状の電圧が各電磁ブレーキ21b〜26bの励磁コイル21c〜26cに印加される場合には、電磁ブレーキ21b,22bに対応して設けられる半導体リレー51,52を共通のPG41により駆動し、電磁ブレーキ23b〜26bに対応して設けられる半導体リレー53〜56を共通のPG43により駆動することができる。こうした構成によれば、PGの数を減らすことができるため、装置のコストを抑制することができる。さらに、この場合に、共通のPGにより駆動される半導体リレーを共通化することにより、装置のコストを更に抑制することができる。
【0100】
・上記各実施形態では、電圧印加のON−OFF制御においてDUTY(ON期間とOFF期間との合計のうちON期間の比率)を、各駆動軸の制動が解除された状態を維持することが可能な範囲で最小のDUTYに定めていたが、ロボット10の各軸J1〜J6の関節部分における動作状況等に応じて適宜それよりも大きいDUTYに設定してもよい。また、複数の電磁ブレーキ21b〜26bにおける上記最小のDUTYのうち、最も大きいDUTYで全ての電磁ブレーキ21b〜26bの励磁コイル21c〜26cへ電圧印加を行うようにしてもよい。こうした構成によれば、PG41〜46及び半導体リレー51〜56を全ての電磁ブレーキ21b〜26bで共通化することができる。この場合であっても、各電磁ブレーキ21b〜26bの励磁コイルへ21c〜26cへの電圧印加がON−OFF制御されつつ、各駆動軸の制動が解除された状態が維持される。このため、各電磁ブレーキ21b〜26bの励磁コイル21c〜26cへ供給される電力を抑制することができ、励磁コイル21c〜26cを含む回路の通電による発熱を抑制することができる。
【0101】
・発熱を抑制する必要性の高い(定格電力の大きい)電磁ブレーキ21b,22bに対して電圧印加のON−OFF制御を行い、発熱を抑制する必要性の低い(定格電力の小さい)電磁ブレーキ23b〜26bに対して、従来と同様の制御(電圧印加のON状態を維持する制御)を行うようにしてもよい。こうした構成によれば、発熱を抑制する必要性の低い電磁ブレーキ23b〜26bでは、励磁コイル23c〜26cへの電圧印加を行う回路として従来と同様のものを用いることができる。
【符号の説明】
【0102】
10…ロボット、21〜26…モータ(サーボモータ)、21b〜26b…電磁ブレーキ、21c〜26c…励磁コイル、30…CPU、41〜46…パルス発生器(PG)、51〜56…半導体リレー。
【特許請求の範囲】
【請求項1】
多関節型ロボットの各関節に駆動軸を駆動するサーボモータが設けられ、その各サーボモータが有する非励磁作動型の電磁ブレーキによる前記駆動軸の制動を制御する装置であって、
前記駆動軸の制動を解除する期間において、前記電磁ブレーキの励磁コイルへの電力供給を繰返しON及びOFFするON−OFF制御を実行しつつ、前記駆動軸の制動が解除された状態を維持する制動解除維持手段を備えることを特徴とするロボットの電磁ブレーキ制御装置。
【請求項2】
前記電磁ブレーキとして定格電力の異なる複数の電磁ブレーキを含み、
前記制動解除維持手段は、前記ON−OFF制御においてON期間とOFF期間とを周期的に繰返すものであり、前記ON期間と前記OFF期間との比率が前記電磁ブレーキ毎に予め定められていることを特徴とする請求項1に記載のロボットの電磁ブレーキ制御装置。
【請求項3】
前記ON期間とOFF期間との比率は、各駆動軸の制動が解除された状態を維持することが可能な範囲でOFF期間の比率が最大である所定比率に予め定められていることを特徴とする請求項2に記載のロボットの電磁ブレーキ制御装置。
【請求項4】
共通の電源から各電磁ブレーキに電力が供給されており、
前記制動解除維持手段は、前記ON−OFF制御においてON期間とOFF期間とを周期的に繰返すものであり、第1電磁ブレーキの励磁コイルと第2電磁ブレーキの励磁コイルとで、電力供給のON期間が互いに重複しないようにずらすことを特徴とする請求項1乃至3のいずれか1項に記載のロボットの電磁ブレーキ制御装置。
【請求項5】
前記第1電磁ブレーキの定格電力は前記第2電磁ブレーキの定格電力よりも大きく、前記第1電磁ブレーキの数は前記第2電磁ブレーキの数よりも少ないことを特徴とする請求項4に記載のロボットの電磁ブレーキ制御装置。
【請求項6】
前記制動解除維持手段は、前記第1電磁ブレーキの励磁コイルと前記第2電磁ブレーキの励磁コイルとで、前記ON−OFF制御を同一の周期で行うことを特徴とする請求項4又は5に記載のロボットの電磁ブレーキ制御装置。
【請求項7】
前記制動解除維持手段は、定格電力の最も大きい2つの電磁ブレーキを、それぞれ異なるグループの前記第1電磁ブレーキとし、各グループにおいて、第1電磁ブレーキの励磁コイルと第2電磁ブレーキの励磁コイルとで、電力供給のON期間が互いに重複しないようにずらすことを特徴とする請求項4乃至6のいずれか1項に記載のロボットの電磁ブレーキ制御装置。
【請求項8】
共通の電源から各電磁ブレーキに電力が供給されており、
前記電磁ブレーキとして、定格電力の最も大きい第1電磁ブレーキと、定格電力の2番目に大きい第2電磁ブレーキと、その他の第3電磁ブレーキとを含み、
前記制動解除維持手段は、前記ON−OFF制御においてON期間とOFF期間とを周期的に繰返すものであり、前記第1電磁ブレーキの励磁コイルと、前記第2電磁ブレーキ及び前記第3電磁ブレーキの励磁コイルとで、電力供給のON期間が互いに重複しないようにずらすことを特徴とする請求項1乃至3のいずれか1項に記載のロボットの電磁ブレーキ制御装置。
【請求項1】
多関節型ロボットの各関節に駆動軸を駆動するサーボモータが設けられ、その各サーボモータが有する非励磁作動型の電磁ブレーキによる前記駆動軸の制動を制御する装置であって、
前記駆動軸の制動を解除する期間において、前記電磁ブレーキの励磁コイルへの電力供給を繰返しON及びOFFするON−OFF制御を実行しつつ、前記駆動軸の制動が解除された状態を維持する制動解除維持手段を備えることを特徴とするロボットの電磁ブレーキ制御装置。
【請求項2】
前記電磁ブレーキとして定格電力の異なる複数の電磁ブレーキを含み、
前記制動解除維持手段は、前記ON−OFF制御においてON期間とOFF期間とを周期的に繰返すものであり、前記ON期間と前記OFF期間との比率が前記電磁ブレーキ毎に予め定められていることを特徴とする請求項1に記載のロボットの電磁ブレーキ制御装置。
【請求項3】
前記ON期間とOFF期間との比率は、各駆動軸の制動が解除された状態を維持することが可能な範囲でOFF期間の比率が最大である所定比率に予め定められていることを特徴とする請求項2に記載のロボットの電磁ブレーキ制御装置。
【請求項4】
共通の電源から各電磁ブレーキに電力が供給されており、
前記制動解除維持手段は、前記ON−OFF制御においてON期間とOFF期間とを周期的に繰返すものであり、第1電磁ブレーキの励磁コイルと第2電磁ブレーキの励磁コイルとで、電力供給のON期間が互いに重複しないようにずらすことを特徴とする請求項1乃至3のいずれか1項に記載のロボットの電磁ブレーキ制御装置。
【請求項5】
前記第1電磁ブレーキの定格電力は前記第2電磁ブレーキの定格電力よりも大きく、前記第1電磁ブレーキの数は前記第2電磁ブレーキの数よりも少ないことを特徴とする請求項4に記載のロボットの電磁ブレーキ制御装置。
【請求項6】
前記制動解除維持手段は、前記第1電磁ブレーキの励磁コイルと前記第2電磁ブレーキの励磁コイルとで、前記ON−OFF制御を同一の周期で行うことを特徴とする請求項4又は5に記載のロボットの電磁ブレーキ制御装置。
【請求項7】
前記制動解除維持手段は、定格電力の最も大きい2つの電磁ブレーキを、それぞれ異なるグループの前記第1電磁ブレーキとし、各グループにおいて、第1電磁ブレーキの励磁コイルと第2電磁ブレーキの励磁コイルとで、電力供給のON期間が互いに重複しないようにずらすことを特徴とする請求項4乃至6のいずれか1項に記載のロボットの電磁ブレーキ制御装置。
【請求項8】
共通の電源から各電磁ブレーキに電力が供給されており、
前記電磁ブレーキとして、定格電力の最も大きい第1電磁ブレーキと、定格電力の2番目に大きい第2電磁ブレーキと、その他の第3電磁ブレーキとを含み、
前記制動解除維持手段は、前記ON−OFF制御においてON期間とOFF期間とを周期的に繰返すものであり、前記第1電磁ブレーキの励磁コイルと、前記第2電磁ブレーキ及び前記第3電磁ブレーキの励磁コイルとで、電力供給のON期間が互いに重複しないようにずらすことを特徴とする請求項1乃至3のいずれか1項に記載のロボットの電磁ブレーキ制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2011−115918(P2011−115918A)
【公開日】平成23年6月16日(2011.6.16)
【国際特許分類】
【出願番号】特願2009−277367(P2009−277367)
【出願日】平成21年12月7日(2009.12.7)
【出願人】(501428545)株式会社デンソーウェーブ (1,155)
【Fターム(参考)】
【公開日】平成23年6月16日(2011.6.16)
【国際特許分類】
【出願日】平成21年12月7日(2009.12.7)
【出願人】(501428545)株式会社デンソーウェーブ (1,155)
【Fターム(参考)】
[ Back to top ]