
ロボットアーム、ロボット及び制御方法
【課題】打楽器の演奏だけでなく他の作業も可能とするロボットアームを提供すること。
【解決手段】本発明の一態様に係るロボットアームは、動作部と、前記動作部が回動自在に連結された支持部と、前記動作部の回動運動を直線運動に変換して、移動部材に伝達する変換機構と、前記移動部材の移動距離を検出する距離センサと、前記距離センサで検出された前記移動部材の移動距離に基づいて、前記動作部の動作を制御する制御部とを備えるものである。
【解決手段】本発明の一態様に係るロボットアームは、動作部と、前記動作部が回動自在に連結された支持部と、前記動作部の回動運動を直線運動に変換して、移動部材に伝達する変換機構と、前記移動部材の移動距離を検出する距離センサと、前記距離センサで検出された前記移動部材の移動距離に基づいて、前記動作部の動作を制御する制御部とを備えるものである。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、楽器の演奏や他の作業を行うロボットアーム、ロボット及び制御方法に関する。
【背景技術】
【0002】
従来から、テーマパークのアトラクション等で、打楽器を演奏するロボットが活躍している。このロボットは、スティックを持ったハンドを備えており、演奏する曲にあわせてハンドを動作させることによって、スティックの先端を打楽器の打面に打ち下ろして演奏する。このような実際の打楽器をロボットに演奏させる技術として、例えば特許文献1〜5がある。
【0003】
従来のロボットでは、打楽器の演奏を行うために、スティックを加工してハンドに固定していた。例えば、特許文献4に記載の打楽器演奏ロボットでは、ドラムの演奏を行うため、スティックが掌部に回転軸を支点として回転可能に連結されている。また、スティックと掌部の間にはスプリングが圧縮状態で挿入されており、このバネの復元力を利用して、スティックを動かすことにより演奏を行う。
【特許文献1】特開2004−177686号公報
【特許文献2】特開2002−258836号公報
【特許文献3】特開2007−41168号公報
【特許文献4】特開2006−159295号公報
【特許文献5】特開2004−354613号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
従来の打楽器演奏ロボットのハンドは、打楽器の演奏専用となっており、汎用性を有しない構成となっている。近年、家庭内アシスタントや器用な動作を可能にするロボットアームのニーズが高まっている。この中で、打楽器の演奏に用いるロボットアームについても打楽器の演奏専用ではなく、他の楽器を演奏したり、他の作業にも使用できる汎用化が求められている。
【0005】
本発明は、このような事情を背景としてなされたものであり、本発明の目的は、打楽器の演奏だけでなく、他の作業も可能とする汎用性のあるロボットアーム、ロボット及び制御方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の第1の態様に係るロボットアームは、動作部と、前記動作部が回動自在に連結された支持部と、前記動作部の回動運動を直線運動に変換して、移動部材に伝達する変換機構と、前記移動部材の移動距離を検出する距離センサと、前記距離センサで検出された前記移動部材の移動距離に基づいて、前記動作部の動作を制御する制御部とを備えるものである。これにより、汎用性のあるロボットアームを実現することが可能である。
【0007】
本発明の第2の態様に係るロボットアームは、上記のロボットアームにおいて、前記距離センサは、前記移動部材との間の静電容量の変化により、前記移動部材の移動距離を検出するものである。これにより、低コストで汎用性のあるロボットアームを実現することが可能である。
【0008】
本発明の第3の態様に係るロボットアームは、上記のロボットアームにおいて、前記動作部は手部であり、掌部と、前記掌部に連結された複数の指部と、前記指部を屈曲させる関節部とを有し、前記指部を屈曲させることで把持対象を把持するものである。これにより、さらに汎用性を向上させることができる。
【0009】
本発明の第4の態様に係るロボットアームは、上記のロボットアームにおいて、前記指部は、第1指部と第2指部を含み、前記第1指部と前記第2指部との間で挟み込むように把持対象を把持するものである。このような場合に、好適に打楽器の演奏を行うことができる。
【0010】
本発明の第5の態様に係るロボットアームは、上記のロボットアームにおいて、前記複数の指部の少なくとも1箇所に、前記把持対象の把持状態を検出する把持検出センサを備えるものである。これにより、把持状態を確認することができ、安全に人と共生することができる。
【0011】
本発明の第6の態様に係るロボットアームは、上記のロボットアームにおいて、前記指部は、第3指部を含み、前記掌部に設けられ、前記把持対象の接触を検出する接触検出センサをさらに備え、前記接触検出センサの検出結果に基づいて、前記掌部と前記第3指部の距離を制御するものである。これにより、所望の演奏動作を行うことが可能となる。
【0012】
本発明の第7の態様に係るロボットは、上記いずれかに記載のロボットアームを備えるものである。
【0013】
本発明の第8の態様に係るロボットの制御方法は、動作部の回動運動を変換して、移動部材に伝達するステップと、前記移動部材の移動距離を検出するステップと、前記移動部材の移動距離に基づいて、前記動作部の動作を制御するステップとを有する。これにより、ロボットの汎用性を向上させることが可能となる。
【発明の効果】
【0014】
本発明によれば、打楽器の演奏だけでなく、他の作業も可能とする汎用性のあるロボットアーム、ロボット及び制御方法を提供することができる。
【発明を実施するための最良の形態】
【0015】
以下に、本発明を適用した具体的な実施の形態について、図面を参照しながら詳細に説明する。各図面において、同一要素には同一の符号が付されており、説明の明確化のため、必要に応じて重複説明は省略する。
【0016】
本発明に係るロボットは、打楽器の演奏だけではなく、他の楽器の演奏や、他の作業も行うことができる。本発明では、打楽器演奏において、従来のように打力の制御を行うための専用の機構(スプリングや、スティック固定部品等)を使用せずに、複数の指部を備えるハンドの打力制御を可能にするシステムを構成して汎用性の向上を行うものである。なお、以下の説明では、スティックを把持した状態での打楽器の演奏動作について説明するが、これに限定されるものではない。
【0017】
なお、本発明による汎用性向上とは、例えば、下記に掲げる物の把持や、各動作の制御への応用をさす。本発明に係るロボットが行うことができる動作として、例えば、(1)タンバリン等の打楽器の演奏や人の肩たたき等、物を把持しない状態での打力制御、(2)ヴァイオリンの弓や打楽器全般のスティック等、棒状物体の把持制御及びこれらを用いた楽器への打力制御等の動作制御、(3)包丁を使用した食品を切断する動作等の柄をもつ物体の把持とその動作制御等が挙げられる。また、物の把持だけであれば、掌サイズの物体なら対応可能である。
【0018】
本発明の実施の形態に係るロボットアーム及びこれを備えるロボットについて、図面を参照して説明する。図1は、本実施の形態に係るロボット100の構成を示す図である。図2は、図1に示すロボットの手部20の構成を示す図である。図3は、本実施の形態に係るロボット100の動作を説明するための図である。図4は、図3のA部の構成を示す図である。本実施の形態に係るロボット100は、打楽器を演奏する際に、1回のストロークで打楽器の打面を単発的に叩く単打演奏と、1回のストロークで打楽器の打面を複数回連続的に叩くロール演奏を含む複数の演奏法を行うことができる。
【0019】
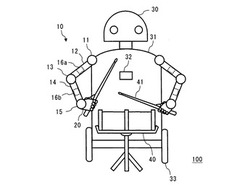
まず、図1を参照して、本実施の形態に係るロボット100の構成について説明する。ロボット100は、ヒトを模して作成されたヒューマノイド・ロボットである。ここでは、ロボット100は、打楽器の一例であるドラム40を演奏する場合について説明する。図1に示すように、ロボット100は、腕部10、頭部30、胴体部31、制御部32、車輪33等を備えている。
【0020】
胴体部31は、略直方体形状を有している。胴体部31には、ロボット100の動作を統括的に制御する制御部32が収納されている。胴体部31には、右腕部、左腕部として、2本の腕部10が接続されている。右腕部と、左腕部とは略同一の構成を有している。腕部10は、肩関節11、上腕部12、肘関節13、前腕部14、手首関節15、手部20を有している。胴体部31には、上腕部12の一端が、肩関節11を介して揺動自在に取り付けられている。
【0021】
上腕部12の他端には、肘関節13を介して、前腕部14の一端が接続されている。前腕部14は肘関節13を支点として揺動可能である。また、上腕部12の内部には前腕部14を揺動させるアクチュエータ16aが設けられている。アクチュエータ16aとしては、例えば、ソレノイドやモータ等を用いることができる。このアクチュエータ16aは、制御部32から出力される制御信号により駆動される。
【0022】
前腕部14の他端には、手首関節15を介して手部20が連結されている。手部20は、手首関節15を支点として揺動可能である。前腕部14の内部には、手部20を揺動させるアクチュエータ16bが設けられている。アクチュエータ16bとしては、ソレノイドやモータ等を用いることができる。このアクチュエータ16bもまた、制御部32から出力される制御信号により駆動される。手部20には、ドラム40を演奏する(叩く)ためのスティック41が把持されている。手部20がスティック41を用いて、打楽器を演奏する動作部である。また、本実施の形態では、前腕部14が支持部となる。手部20によるスティックの把持の様子については、後に詳述する。
【0023】
また、胴体部31の下側には、車輪33が接続されている。ロボット100は、車輪33を回転させることによって、前進/後退をする。本実施の形態に係るロボット100は、ヒトがドラム40を叩きながら行進するように、車輪33を回転させて移動しながらドラム40の演奏を行う。
【0024】
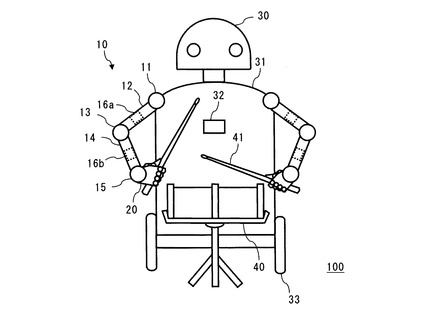
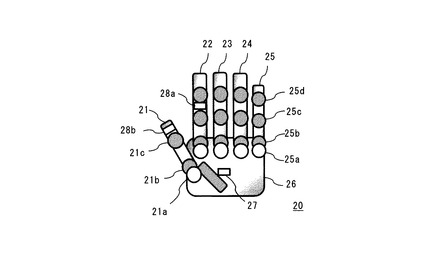
ここで、図2を参照して、手部20の構成について説明する。手部20は、複数の指部を有する。図2に示すように、手部20は、人間の手と同様に、親指部21、人差し指部22、中指部23、薬指部24、小指部25の5本の指部を備えている。これらの指部は、掌部26に連結されている。もちろん、指部の本数は、4本以下でもよく6本以上でもよい。
【0025】
親指部21は、第1関節21a、第2関節21b、第3関節21cを備える。第1関節21aは、親指部21を内外転させ、各指部間の間隔の調整を行う。第2関節21b、第3関節21cは、親指部21を屈曲させる。第2関節21bは、第1関節21aよりも指先のほうに設けられている。また、第3関節21cは、第2関節21cよりも指先のほうに設けられている。
【0026】
人差し指部22、中指部23、薬指部24、小指部25は、略同一の構成を有している。そこで、小指部25を代表して、その構成について説明する。小指部25は、第1関節25a、第2関節25b、第3関節25c、第4関節25dを有している。第1関節25aは、小指部25を内外転させ、各指部間の間隔の調整を行う。第2関節25b、第3関節25c、第4関節25dは、小指部25を屈曲させる。第2関節25bは、第1関節25aよりも指先のほうに設けられている。また、第3関節25cは、第2関節25bよりも指先のほうに設けられている。第4関節25dは、第3関節25cよりも指先のほうに設けられている。
【0027】
掌部26には、接触検出センサ27が設けられている。接触検出センサ27は、スティック41を把持して、ドラム40の演奏を行ったときのスティック41の接触状態を検出するセンサである。接触検出センサ27としては、例えば圧力センサ等を用いることができる。打面40aを叩くと、スティック41から接触検出センサ27に力が加わる。従って、接触検出センサ27により、打面40aを叩いたことを認識することができる。
【0028】
また、人差し指部22の第3関節と第4関節との間には、把持検出センサ28aが設けられている。また、親指部21の第3関節21cよりも指先の部分にも把持検出センサ28bが設けられている。把持検出センサ28a、28bとしては、圧力センサ等を用いることができる。本実施の形態においては、親指部21の第3関節21cよりも指先の部分、及び、人差し指部22の第3関節と第4関節との間で、スティック41を把持する。把持検出センサ28a、28bは、スティック41を把持しているかどうかを検出する。なお、把持検出センサは、把持対象を把持したときに、複数の指部の把持対象が接触する部分のうち、少なくとも1ヶ所に設けられていればよい。これにより、把持対象を把持していることを検出でき、安全にヒトとの共生が可能となる。
【0029】
ここで、図3を参照して、手部20によるスティック41の把持の様子について説明する。本実施の形態においては、ロボット100は、手部20に設けられた各関節部を駆動して、複数の指部を屈曲させることによりスティック41を把持する。スティック41は親指部21及び掌部26と、人差し指部22、中指部23、薬指部24及び小指部25との間に保持される。具体的には、スティック41を親指部21と、人差し指部22の第3関節−第4関節の間の指節で挟み込むように把持し、残りの中指部23、薬指部24、小指部25をスティック41に添える。中指部23、薬指部24、小指部25は、スティック41のストッパの役割を果たす。この状態でスティック41を振り上げて、ドラム40の打面40aに向かって振り落とすことにより、ドラム40の演奏を行うことできる。なお、ドラム40を叩いたときの衝撃によりスティック41が落ちないように、各指部を駆動するモータに、減速機を設けてもよい。これにより、減速比に比例したトルクを得ることで把持力が増加し、スティック41を落とさないようにすることができる。
【0030】
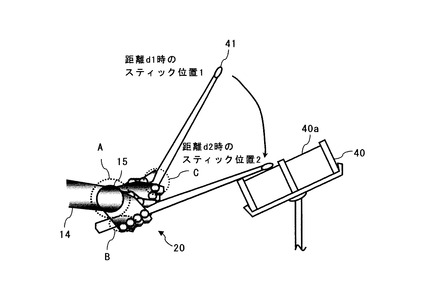
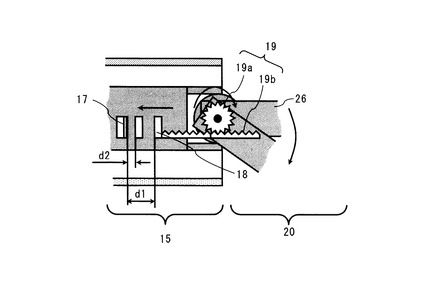
図4を参照して、図3のA部の構成を示す。図4に示すように、手首関節15には、距離センサ17、基準部材18、変換機構19が設けられている。変換機構19としては、例えば、ピニオン19aとラック19bとを備えるラックアンドピニオンギアを用いることができる。ピニオン19aは、円形の歯車である。ラック19bは、ピニオン19aの歯にあわせて歯切りされた平板である。掌部26の可動軸に、ピニオン19aの回転軸が固定されている。掌部26をモータ等により回動させることにより、掌部26の回動角度と連動してピニオン19aが回転する。掌部26を回動させるとピニオン19aが回転し、ラック19bが水平方向に動く。すなわち、変換機構19は、掌部26の回動運動を直線運動に変換して、移動部材であるラック19bに伝達する。
【0031】
距離センサ17は、ラック19bの移動距離を検出する。距離センサ17としては、例えば、浮遊静電容量センサを用いることができる。距離センサ17として浮遊静電容量センサを用いることにより、構成部品が少なく、構成をシンプルにすることができ、コストを低減することができる。ラック19bの距離センサ17側の端には、距離センサ17の検知面と平行に導体からなる基準部材18が設けられている。距離センサ17は、基準部材18との間の静電容量の変化によりラック19bの移動距離を検出する。なお、距離センサ17としては、超音波センサやレーザーセンサ等を用いることも可能である。この場合には、基準部材18は導体に限定されない。また、レーザーセンサを用いた場合には、他の距離センサと比較して、計測精度をより向上させることができる。
【0032】
掌部26の角度の変化は、距離センサ17で検出される浮遊静電容量の変化、すなわち、距離センサ17の検知面と基準部材18との距離(センサ間距離とする)の変化となる。例えば、図4に示すように、センサ間距離がd1の時には図3のスティック位置1まで振り上げられる。また、センサ間距離がd1よりも短いd2の時には、スティック位置1よりも打面40aに近いスティック位置2となる。なお、センサ間距離d2のときのスティック位置2は、打面40aの当接する位置とする。
【0033】
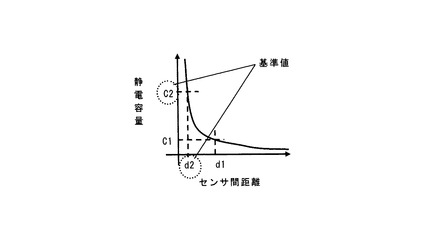
図5に、本実施の形態に係るロボット100に用いられる距離センサ17の検知面と基準部材18との距離(センサ間距離)と浮遊静電容量の関係を示す。掌部26を打面40aから離れる方向に回動させるとセンサ間距離は長くなり、距離センサ17により検出される浮遊静電容量は小さくなる。一方、掌部26を打面40aに近づく方向に回動させるとセンサ間距離は短くなり、距離センサ17により検出される浮遊静電容量は大きくなる。図4に示す例では、センサ間距離d1の時には浮遊静電容量の値はC1である。また、センサ間距離がd1よりも短いd2の時には浮遊静電容量の値はC1より大きいC2となる。
【0034】
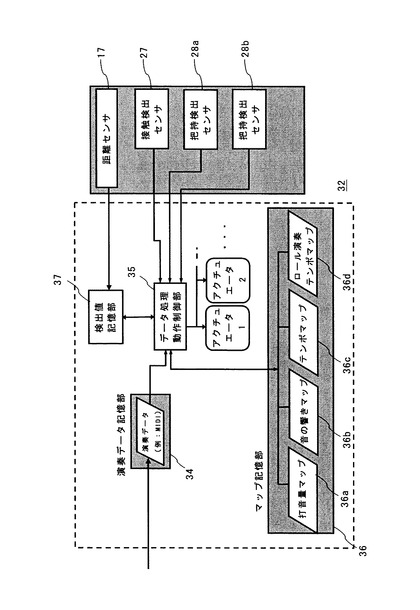
制御部32は、距離センサ17で検出されたラック19bの移動距離に基づいて、手部20の動作を制御する。ここで、制御部32について、図6を参照して詳細に説明する。図6は、本実施の形態に係る制御部32の構成を示すブロック図である。図6に示すように、制御部32は、演奏データ記憶部34、データ処理動作制御部35、マップ記憶部36、検出値記憶部37を備えている。演奏データ記憶部34は、外部から入力される、演奏曲に合わせて作成されたピッチや時間、音量のデータを含む演奏データが記憶される。
【0035】
マップ記憶部36には、打音量マップ36a、音の響きマップ36b、テンポマップ36c、ロール演奏テンポマップ36dが記憶されている。打音量マップ36aには、スティック41の振り上げ量や、スティック41を打面40aに振り下ろすスピード等に対応する打音量が記憶されている。音の響きマップ36bには、スティック41を打面40aに振り下ろし、打面40aを叩いた後に、スティック41をどの位置で待機させるか、待機する時間等に対応する音の響きの長さ、大きさが記憶されている。テンポマップ36cには、スティック41の振り上げ量や、スティック41を打面40aに振り下ろすスピードに対応するテンポが記憶されている。ロール演奏テンポマップ36dには、ロール演奏を行う際のロボットに必要な動作に対応するテンポが記憶されている。なお、ロール演奏テンポマップ36dについては、後に詳述する。
【0036】
検出値記憶部37は、手部20に設けられた距離センサ17、接触検出センサ27、把持検出センサ28a、28bからの検出値を記憶する。データ処理動作制御部35は、検出値記憶部37に記憶された各センサの検出値を参照して、マップ記憶部36に記憶された各種のマップ、及び、演奏データ記憶部34に記憶された演奏データを用いてロボット100の動作を指令する。すなわち、検出値記憶部37は、所望の打音量、テンポ、響きを実現するための、スティック41の振り上げ量や、振り下ろすスピード、スティック41で打面40aを叩き終わった後の、スティック41を待機させる位置等の演奏動作を決定し、各部を駆動するアクチュエータに出力する。
【0037】
ここで、本実施の形態に係るロボット100の制御方法について説明する。ここでは、まず、単打演奏を行う場合について説明する。本実施の形態に係るロボット100は、振り上げ量による打音量等の制御、及び、打面40aを叩いた後の待機位置による打音量等の制御が可能である。なお、打音量は、スティック41の振り下ろし開始位置、及び振り下ろしスピードに関係する。音の響きは、スティック41の打面40aを叩いた後の待機位置、及び待機時間(打面40aに接触する位置にスティック41が保持される時間)に関係する。テンポは、振り下ろし開始位置及びスティック41の動作スピードに関係する。
【0038】
まず、振り上げ量による打音等の制御について説明する。最初に、上述のように、スティック41を把持した状態で、あらかじめ定められた動作でスティック41を1度振り上げ、ドラム40の打面40aを叩く。そして、このときの打面40aを叩いた衝撃による力を、掌部26に設けられた接触検出センサ27により検出する。さらに、距離センサ17によりラック19bとの浮遊静電容量C1を計測し、これを基準値として検出値記憶部37に記憶させる。なお、センサ間距離d1を検出値記憶部37に記憶させてもよい。
【0039】
そして、所望の打音量、音の響き具合、テンポとなるように、検出値記憶部37に記憶された検出値と、打音量マップ36a、音の響きマップ36b、テンポマップ36cを用いて、データ処理動作制御部35により、スティック41の振り上げ位置、手部20の動作スピードを決定して、各アクチュエータを制御することで打楽器演奏を実現する。
【0040】
次に、打面40aを叩いた後の待機位置による打音量の制御について説明する。まず、上述と同様に、スティック41を把持した状態で、あらかじめ定められた動作でスティック41を1度振り上げ、ドラム40の打面40aを叩く。そして、このときの打面40aを叩いた衝撃による力を、掌部26に設けられた接触検出センサ27により検出する。そして、打面40aに当接する位置の浮遊静電容量C2又はセンサ間距離d2を基準値として記憶する。
【0041】
そして、所望の打音量、音の響き具合、テンポとなるように、マップ記憶部36の各マップを用いて、基準値に±した値を目標値として、打面40aを叩いた後のスティック41の待機位置及び待機時間を決定する。具体的には、基準値より+側に目標値を設定した場合、すなわち、打面40aよりも下側の位置を待機位置とした場合、スティック41で打面40aを叩いた後に、スティック41と打面40aとの接触時間が増加する。これにより、打面40aの振動が抑えられ、打音量が低下し、響きがなくなる。一方、基準値より−側に目標値を設定した場合、すなわち、打面40aよりも上側の位置を待機位置とした場合、スティック41で打面40aを叩いた後に、スティック41は打面40aからすぐに離れ、接触時間が減少する。これにより、打音量が増加し、響きが大きくなる。
【0042】
このように、本発明によれば、検出値記憶部37に記憶された検出値と、マップ記憶部36に記憶されたマップを用いて、所望の打音量、音の響き具合、テンポとなるように、スティックの振り上げ位置、手部20の動作スピード、待機位置、待機時間等を制御するができる。
【0043】
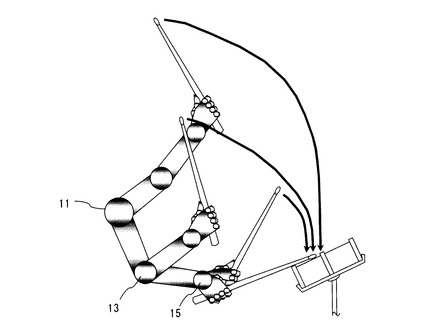
なお、本実施の形態においては、手首関節15に距離センサ17及び変換機構19を設ける構成について説明したが、これに限定されるものではない。例えば、肘関節13や、肩関節11に同様の構成を設けてもよい。図7に、肩関節11、肘関節13、手首関節15に、距離センサ17及び変換機構19を設けた場合の、打楽器を演奏する際のロボットアームの動作の例を示す。図7に示すように、手首関節15に設けた場合と比較すると、肘関節13に設けた場合には、振り上げ位置をさらにドラム40の打面40aから離れた位置にすることができる。また、肩関節11に設けた場合には、さらに振り上げ位置を高くすることができる。このように、腕部10の各関節に同様の機構を設けることにより、打音量の変化レンジを広げることが可能となる。
【0044】
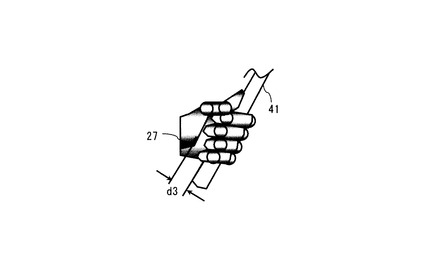
次に、図8を参照してロール演奏を行う場合について説明する。図8は、本実施の形態に係るロボット100において、ロール演奏を行う際のロボットアームの動作を説明する図である。上述したように、ロール演奏を行う場合においても、スティック41を親指部21と、人差し指部22の第3関節−第4関節の間の指節で挟み込むように把持し、残りの中指部23、薬指部24、小指部25をスティック41に添える。中指部23、薬指部24、小指部25は、スティック41のストッパの役割を果たす。掌部26と中指部23、薬指部24、小指部25との間には、所定の距離d3の間隙が設けられている。スティック41は、親指部21と、人差し指部22の第3関節−第4関節の間の指節で把持された点を支点として、掌部26と中指部23、薬指部24、小指部25との間で、回動自在に支持されている。
【0045】
ロール演奏を行う場合、スティック41を振り上げてドラム40の打面40aに向かって振り落とすと、打面40aとの衝突により、スティック41の先端が跳ね上げられる。そして、スティック41の先端は打面40aから離れる方向に上記の支点を中心として回転する。掌部26と中指部23、薬指部24、小指部25との間には所定の距離d3の間隙が設けられており、スティック41の回動範囲が制限されている。このため、打面40aで跳ね上げられたスティック41の後ろ側が、中指部23、薬指部24、小指部25に衝突し、スティック41の先端は再度打面40aに向かって振り下ろされる。
【0046】
これにより、スティック41の先端がドラム40の打面40aに再度衝突し、2打目の打音が発生する。このように、掌部26と中指部23、薬指部24、小指部25との間に間隙を設けることによって、スティック41の可動範囲を規定することにより、1回のストロークで複数の打音を発生するロール演奏を実現することができる。なお、本実施の形態においては、ストッパとして、中指部23、薬指部24、小指部25の3本の指部を備える構成としたが、少なくとも1本あればよい。
【0047】
掌部26と中指部23、薬指部24、小指部25との間の距離d3を変化させることによって、スティック41の回動範囲を制御することができる。すなわち、距離d3を短くすればスティック41の回動範囲が狭くなり、速いテンポでロール演奏することが可能となる。一方、距離d3を長くすれば、スティックの回動範囲が広くなり、テンポを遅くすることができる。距離d3は、中指部23、薬指部24、小指部25を掌部26側に屈曲させることにより変更することができる。
【0048】
接触検出センサ27は、スティック41の後ろ側の接触を検知する。すなわち、接触検出センサ27は、ロール演奏の打撃間隔、すなわち、テンポを検出することができる。ロール演奏テンポマップ36dには、ロール演奏を行う際のロボットに必要な動作に対応するテンポが記憶されている。具体的には、掌部26と中指部23、薬指部24、小指部25との間の距離d3に対応するテンポが記憶されている。
【0049】
ロール演奏を行う場合には、ロール演奏テンポマップ36dを用いて所望のテンポとなるように、掌部26と各指部との間の距離d3を制御することにより、スティック41の回動範囲を変更し、スティック41の打面40aからの反力を利用して演奏することができる。また、接触検出センサ27により検出されたロール演奏の打撃間隔を参照して、距離d3を変更することも可能である。
【0050】
なお、上述の実施の形態では、打楽器の一例としてドラム40を用いた例について説明したが、これに限定されるものではない。これ以外にも、例えば、バスドラム、メロディックタム、フロアタム、ティンパニ、和太鼓といった膜鳴打楽器、シンバル、トライアングル、ゴング、釣鐘、木魚等の体鳴打楽器でもよい。さらに、シロフォン、マリンバを含む木琴や、グラッケンシュピール、ヴィブラフォンを含む鉄琴といった鍵盤打楽器でもよい。さらに、膜面の振動をセンサによって検知し、膜面の振動を信号によって送信し、他の音源で音を生成する電子ドラムであってもよい。
【0051】
複数の打楽器を演奏する場合には、それぞれの楽器について、あらかじめ定められた動作でドラム40の打面40aを叩き、距離センサ17によりラック19bとの浮遊静電容量C1を計測し、これを基準値として検出値記憶部37に記憶させる。そして、所望の打音量、音の響き具合、テンポとなるように、スティックの振り上げ位置、手部20の動作スピードを決定することで打楽器演奏を実現することができる。なお、打楽器の打面位置の認識については、あらかじめ打面の位置を設定しロボットに記憶させてもよいし、カメラ等を設けて形状認識を行ってもよい。
【0052】
また、本発明は、打楽器の演奏を行うロボットに限定されない。例えば、ヴァイオリンの弓を弦に当接させた状態で、掌部26の角度を変更することにより、ヴァイオリンの演奏にも応用することが可能である。もちろん、ヴァイオリンに限定されず、他の弦楽器、例えば、ビオラ、チェロ、コントラバス、ウッドベースなどの擦弦楽器について応用することができる。また、腕部10の振り上げ位置、振り下ろしスピードの制御は、タンバリン等の打楽器の演奏や人の肩たたき等物を把持しない状態での打力制御、包丁を使用した食品を切断する動作等に応用することができる。
【0053】
このように、本発明によれば、打力制御を行うための専用機構(スプリングやスティック固定部品等)をなくし、楽器演奏ロボットによる打楽器演奏を実現することができるとともに、ロボットアームの汎用性向上を実現することができる。
【図面の簡単な説明】
【0054】
【図1】実施の形態に係るロボットの構成を説明する図である。
【図2】実施の形態に係るロボットの手部の構成を示す図である。
【図3】打楽器を演奏する際のロボットアームの動作を説明する図である。
【図4】図3に示すA部の構成を示す図である。
【図5】実施の形態に係るロボットに用いられる距離センサの基準部材との距離と浮遊静電容量の関係を示すグラフである。
【図6】実施の形態に係るロボットの制御部の構成を示すブロック図である
【図7】打楽器を演奏する際のロボットアームの動作の他の例を説明する図である。
【図8】打楽器をロール演奏する際のロボットアームの動作を説明する図である。
【符号の説明】
【0055】
10 腕部
11 肩関節
12 上腕部
13 肘関節
14 前腕部
15 手首関節
16a、16b アクチュエータ
17 距離センサ
18 基準部材
19 変換機構
19a ピニオン
19b ラック
20 手部
21 親指部
22 人差し指部
23 中指部
24 薬指部
25 小指部
26 掌部
27 接触検出センサ
28a、28b 把持検出センサ
30 頭部
31 胴体部
32 制御部
33 車輪
34 演奏データ記憶部
35 データ処理動作制御部
36 マップ記憶部
36a 打音量マップ
36b 音の響きマップ
36c テンポマップ
36d ロール演奏テンポマップ
37 検出値記憶部
40 ドラム
40a 打面
41 スティック
100 ロボット
【技術分野】
【0001】
本発明は、楽器の演奏や他の作業を行うロボットアーム、ロボット及び制御方法に関する。
【背景技術】
【0002】
従来から、テーマパークのアトラクション等で、打楽器を演奏するロボットが活躍している。このロボットは、スティックを持ったハンドを備えており、演奏する曲にあわせてハンドを動作させることによって、スティックの先端を打楽器の打面に打ち下ろして演奏する。このような実際の打楽器をロボットに演奏させる技術として、例えば特許文献1〜5がある。
【0003】
従来のロボットでは、打楽器の演奏を行うために、スティックを加工してハンドに固定していた。例えば、特許文献4に記載の打楽器演奏ロボットでは、ドラムの演奏を行うため、スティックが掌部に回転軸を支点として回転可能に連結されている。また、スティックと掌部の間にはスプリングが圧縮状態で挿入されており、このバネの復元力を利用して、スティックを動かすことにより演奏を行う。
【特許文献1】特開2004−177686号公報
【特許文献2】特開2002−258836号公報
【特許文献3】特開2007−41168号公報
【特許文献4】特開2006−159295号公報
【特許文献5】特開2004−354613号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
従来の打楽器演奏ロボットのハンドは、打楽器の演奏専用となっており、汎用性を有しない構成となっている。近年、家庭内アシスタントや器用な動作を可能にするロボットアームのニーズが高まっている。この中で、打楽器の演奏に用いるロボットアームについても打楽器の演奏専用ではなく、他の楽器を演奏したり、他の作業にも使用できる汎用化が求められている。
【0005】
本発明は、このような事情を背景としてなされたものであり、本発明の目的は、打楽器の演奏だけでなく、他の作業も可能とする汎用性のあるロボットアーム、ロボット及び制御方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の第1の態様に係るロボットアームは、動作部と、前記動作部が回動自在に連結された支持部と、前記動作部の回動運動を直線運動に変換して、移動部材に伝達する変換機構と、前記移動部材の移動距離を検出する距離センサと、前記距離センサで検出された前記移動部材の移動距離に基づいて、前記動作部の動作を制御する制御部とを備えるものである。これにより、汎用性のあるロボットアームを実現することが可能である。
【0007】
本発明の第2の態様に係るロボットアームは、上記のロボットアームにおいて、前記距離センサは、前記移動部材との間の静電容量の変化により、前記移動部材の移動距離を検出するものである。これにより、低コストで汎用性のあるロボットアームを実現することが可能である。
【0008】
本発明の第3の態様に係るロボットアームは、上記のロボットアームにおいて、前記動作部は手部であり、掌部と、前記掌部に連結された複数の指部と、前記指部を屈曲させる関節部とを有し、前記指部を屈曲させることで把持対象を把持するものである。これにより、さらに汎用性を向上させることができる。
【0009】
本発明の第4の態様に係るロボットアームは、上記のロボットアームにおいて、前記指部は、第1指部と第2指部を含み、前記第1指部と前記第2指部との間で挟み込むように把持対象を把持するものである。このような場合に、好適に打楽器の演奏を行うことができる。
【0010】
本発明の第5の態様に係るロボットアームは、上記のロボットアームにおいて、前記複数の指部の少なくとも1箇所に、前記把持対象の把持状態を検出する把持検出センサを備えるものである。これにより、把持状態を確認することができ、安全に人と共生することができる。
【0011】
本発明の第6の態様に係るロボットアームは、上記のロボットアームにおいて、前記指部は、第3指部を含み、前記掌部に設けられ、前記把持対象の接触を検出する接触検出センサをさらに備え、前記接触検出センサの検出結果に基づいて、前記掌部と前記第3指部の距離を制御するものである。これにより、所望の演奏動作を行うことが可能となる。
【0012】
本発明の第7の態様に係るロボットは、上記いずれかに記載のロボットアームを備えるものである。
【0013】
本発明の第8の態様に係るロボットの制御方法は、動作部の回動運動を変換して、移動部材に伝達するステップと、前記移動部材の移動距離を検出するステップと、前記移動部材の移動距離に基づいて、前記動作部の動作を制御するステップとを有する。これにより、ロボットの汎用性を向上させることが可能となる。
【発明の効果】
【0014】
本発明によれば、打楽器の演奏だけでなく、他の作業も可能とする汎用性のあるロボットアーム、ロボット及び制御方法を提供することができる。
【発明を実施するための最良の形態】
【0015】
以下に、本発明を適用した具体的な実施の形態について、図面を参照しながら詳細に説明する。各図面において、同一要素には同一の符号が付されており、説明の明確化のため、必要に応じて重複説明は省略する。
【0016】
本発明に係るロボットは、打楽器の演奏だけではなく、他の楽器の演奏や、他の作業も行うことができる。本発明では、打楽器演奏において、従来のように打力の制御を行うための専用の機構(スプリングや、スティック固定部品等)を使用せずに、複数の指部を備えるハンドの打力制御を可能にするシステムを構成して汎用性の向上を行うものである。なお、以下の説明では、スティックを把持した状態での打楽器の演奏動作について説明するが、これに限定されるものではない。
【0017】
なお、本発明による汎用性向上とは、例えば、下記に掲げる物の把持や、各動作の制御への応用をさす。本発明に係るロボットが行うことができる動作として、例えば、(1)タンバリン等の打楽器の演奏や人の肩たたき等、物を把持しない状態での打力制御、(2)ヴァイオリンの弓や打楽器全般のスティック等、棒状物体の把持制御及びこれらを用いた楽器への打力制御等の動作制御、(3)包丁を使用した食品を切断する動作等の柄をもつ物体の把持とその動作制御等が挙げられる。また、物の把持だけであれば、掌サイズの物体なら対応可能である。
【0018】
本発明の実施の形態に係るロボットアーム及びこれを備えるロボットについて、図面を参照して説明する。図1は、本実施の形態に係るロボット100の構成を示す図である。図2は、図1に示すロボットの手部20の構成を示す図である。図3は、本実施の形態に係るロボット100の動作を説明するための図である。図4は、図3のA部の構成を示す図である。本実施の形態に係るロボット100は、打楽器を演奏する際に、1回のストロークで打楽器の打面を単発的に叩く単打演奏と、1回のストロークで打楽器の打面を複数回連続的に叩くロール演奏を含む複数の演奏法を行うことができる。
【0019】
まず、図1を参照して、本実施の形態に係るロボット100の構成について説明する。ロボット100は、ヒトを模して作成されたヒューマノイド・ロボットである。ここでは、ロボット100は、打楽器の一例であるドラム40を演奏する場合について説明する。図1に示すように、ロボット100は、腕部10、頭部30、胴体部31、制御部32、車輪33等を備えている。
【0020】
胴体部31は、略直方体形状を有している。胴体部31には、ロボット100の動作を統括的に制御する制御部32が収納されている。胴体部31には、右腕部、左腕部として、2本の腕部10が接続されている。右腕部と、左腕部とは略同一の構成を有している。腕部10は、肩関節11、上腕部12、肘関節13、前腕部14、手首関節15、手部20を有している。胴体部31には、上腕部12の一端が、肩関節11を介して揺動自在に取り付けられている。
【0021】
上腕部12の他端には、肘関節13を介して、前腕部14の一端が接続されている。前腕部14は肘関節13を支点として揺動可能である。また、上腕部12の内部には前腕部14を揺動させるアクチュエータ16aが設けられている。アクチュエータ16aとしては、例えば、ソレノイドやモータ等を用いることができる。このアクチュエータ16aは、制御部32から出力される制御信号により駆動される。
【0022】
前腕部14の他端には、手首関節15を介して手部20が連結されている。手部20は、手首関節15を支点として揺動可能である。前腕部14の内部には、手部20を揺動させるアクチュエータ16bが設けられている。アクチュエータ16bとしては、ソレノイドやモータ等を用いることができる。このアクチュエータ16bもまた、制御部32から出力される制御信号により駆動される。手部20には、ドラム40を演奏する(叩く)ためのスティック41が把持されている。手部20がスティック41を用いて、打楽器を演奏する動作部である。また、本実施の形態では、前腕部14が支持部となる。手部20によるスティックの把持の様子については、後に詳述する。
【0023】
また、胴体部31の下側には、車輪33が接続されている。ロボット100は、車輪33を回転させることによって、前進/後退をする。本実施の形態に係るロボット100は、ヒトがドラム40を叩きながら行進するように、車輪33を回転させて移動しながらドラム40の演奏を行う。
【0024】
ここで、図2を参照して、手部20の構成について説明する。手部20は、複数の指部を有する。図2に示すように、手部20は、人間の手と同様に、親指部21、人差し指部22、中指部23、薬指部24、小指部25の5本の指部を備えている。これらの指部は、掌部26に連結されている。もちろん、指部の本数は、4本以下でもよく6本以上でもよい。
【0025】
親指部21は、第1関節21a、第2関節21b、第3関節21cを備える。第1関節21aは、親指部21を内外転させ、各指部間の間隔の調整を行う。第2関節21b、第3関節21cは、親指部21を屈曲させる。第2関節21bは、第1関節21aよりも指先のほうに設けられている。また、第3関節21cは、第2関節21cよりも指先のほうに設けられている。
【0026】
人差し指部22、中指部23、薬指部24、小指部25は、略同一の構成を有している。そこで、小指部25を代表して、その構成について説明する。小指部25は、第1関節25a、第2関節25b、第3関節25c、第4関節25dを有している。第1関節25aは、小指部25を内外転させ、各指部間の間隔の調整を行う。第2関節25b、第3関節25c、第4関節25dは、小指部25を屈曲させる。第2関節25bは、第1関節25aよりも指先のほうに設けられている。また、第3関節25cは、第2関節25bよりも指先のほうに設けられている。第4関節25dは、第3関節25cよりも指先のほうに設けられている。
【0027】
掌部26には、接触検出センサ27が設けられている。接触検出センサ27は、スティック41を把持して、ドラム40の演奏を行ったときのスティック41の接触状態を検出するセンサである。接触検出センサ27としては、例えば圧力センサ等を用いることができる。打面40aを叩くと、スティック41から接触検出センサ27に力が加わる。従って、接触検出センサ27により、打面40aを叩いたことを認識することができる。
【0028】
また、人差し指部22の第3関節と第4関節との間には、把持検出センサ28aが設けられている。また、親指部21の第3関節21cよりも指先の部分にも把持検出センサ28bが設けられている。把持検出センサ28a、28bとしては、圧力センサ等を用いることができる。本実施の形態においては、親指部21の第3関節21cよりも指先の部分、及び、人差し指部22の第3関節と第4関節との間で、スティック41を把持する。把持検出センサ28a、28bは、スティック41を把持しているかどうかを検出する。なお、把持検出センサは、把持対象を把持したときに、複数の指部の把持対象が接触する部分のうち、少なくとも1ヶ所に設けられていればよい。これにより、把持対象を把持していることを検出でき、安全にヒトとの共生が可能となる。
【0029】
ここで、図3を参照して、手部20によるスティック41の把持の様子について説明する。本実施の形態においては、ロボット100は、手部20に設けられた各関節部を駆動して、複数の指部を屈曲させることによりスティック41を把持する。スティック41は親指部21及び掌部26と、人差し指部22、中指部23、薬指部24及び小指部25との間に保持される。具体的には、スティック41を親指部21と、人差し指部22の第3関節−第4関節の間の指節で挟み込むように把持し、残りの中指部23、薬指部24、小指部25をスティック41に添える。中指部23、薬指部24、小指部25は、スティック41のストッパの役割を果たす。この状態でスティック41を振り上げて、ドラム40の打面40aに向かって振り落とすことにより、ドラム40の演奏を行うことできる。なお、ドラム40を叩いたときの衝撃によりスティック41が落ちないように、各指部を駆動するモータに、減速機を設けてもよい。これにより、減速比に比例したトルクを得ることで把持力が増加し、スティック41を落とさないようにすることができる。
【0030】
図4を参照して、図3のA部の構成を示す。図4に示すように、手首関節15には、距離センサ17、基準部材18、変換機構19が設けられている。変換機構19としては、例えば、ピニオン19aとラック19bとを備えるラックアンドピニオンギアを用いることができる。ピニオン19aは、円形の歯車である。ラック19bは、ピニオン19aの歯にあわせて歯切りされた平板である。掌部26の可動軸に、ピニオン19aの回転軸が固定されている。掌部26をモータ等により回動させることにより、掌部26の回動角度と連動してピニオン19aが回転する。掌部26を回動させるとピニオン19aが回転し、ラック19bが水平方向に動く。すなわち、変換機構19は、掌部26の回動運動を直線運動に変換して、移動部材であるラック19bに伝達する。
【0031】
距離センサ17は、ラック19bの移動距離を検出する。距離センサ17としては、例えば、浮遊静電容量センサを用いることができる。距離センサ17として浮遊静電容量センサを用いることにより、構成部品が少なく、構成をシンプルにすることができ、コストを低減することができる。ラック19bの距離センサ17側の端には、距離センサ17の検知面と平行に導体からなる基準部材18が設けられている。距離センサ17は、基準部材18との間の静電容量の変化によりラック19bの移動距離を検出する。なお、距離センサ17としては、超音波センサやレーザーセンサ等を用いることも可能である。この場合には、基準部材18は導体に限定されない。また、レーザーセンサを用いた場合には、他の距離センサと比較して、計測精度をより向上させることができる。
【0032】
掌部26の角度の変化は、距離センサ17で検出される浮遊静電容量の変化、すなわち、距離センサ17の検知面と基準部材18との距離(センサ間距離とする)の変化となる。例えば、図4に示すように、センサ間距離がd1の時には図3のスティック位置1まで振り上げられる。また、センサ間距離がd1よりも短いd2の時には、スティック位置1よりも打面40aに近いスティック位置2となる。なお、センサ間距離d2のときのスティック位置2は、打面40aの当接する位置とする。
【0033】
図5に、本実施の形態に係るロボット100に用いられる距離センサ17の検知面と基準部材18との距離(センサ間距離)と浮遊静電容量の関係を示す。掌部26を打面40aから離れる方向に回動させるとセンサ間距離は長くなり、距離センサ17により検出される浮遊静電容量は小さくなる。一方、掌部26を打面40aに近づく方向に回動させるとセンサ間距離は短くなり、距離センサ17により検出される浮遊静電容量は大きくなる。図4に示す例では、センサ間距離d1の時には浮遊静電容量の値はC1である。また、センサ間距離がd1よりも短いd2の時には浮遊静電容量の値はC1より大きいC2となる。
【0034】
制御部32は、距離センサ17で検出されたラック19bの移動距離に基づいて、手部20の動作を制御する。ここで、制御部32について、図6を参照して詳細に説明する。図6は、本実施の形態に係る制御部32の構成を示すブロック図である。図6に示すように、制御部32は、演奏データ記憶部34、データ処理動作制御部35、マップ記憶部36、検出値記憶部37を備えている。演奏データ記憶部34は、外部から入力される、演奏曲に合わせて作成されたピッチや時間、音量のデータを含む演奏データが記憶される。
【0035】
マップ記憶部36には、打音量マップ36a、音の響きマップ36b、テンポマップ36c、ロール演奏テンポマップ36dが記憶されている。打音量マップ36aには、スティック41の振り上げ量や、スティック41を打面40aに振り下ろすスピード等に対応する打音量が記憶されている。音の響きマップ36bには、スティック41を打面40aに振り下ろし、打面40aを叩いた後に、スティック41をどの位置で待機させるか、待機する時間等に対応する音の響きの長さ、大きさが記憶されている。テンポマップ36cには、スティック41の振り上げ量や、スティック41を打面40aに振り下ろすスピードに対応するテンポが記憶されている。ロール演奏テンポマップ36dには、ロール演奏を行う際のロボットに必要な動作に対応するテンポが記憶されている。なお、ロール演奏テンポマップ36dについては、後に詳述する。
【0036】
検出値記憶部37は、手部20に設けられた距離センサ17、接触検出センサ27、把持検出センサ28a、28bからの検出値を記憶する。データ処理動作制御部35は、検出値記憶部37に記憶された各センサの検出値を参照して、マップ記憶部36に記憶された各種のマップ、及び、演奏データ記憶部34に記憶された演奏データを用いてロボット100の動作を指令する。すなわち、検出値記憶部37は、所望の打音量、テンポ、響きを実現するための、スティック41の振り上げ量や、振り下ろすスピード、スティック41で打面40aを叩き終わった後の、スティック41を待機させる位置等の演奏動作を決定し、各部を駆動するアクチュエータに出力する。
【0037】
ここで、本実施の形態に係るロボット100の制御方法について説明する。ここでは、まず、単打演奏を行う場合について説明する。本実施の形態に係るロボット100は、振り上げ量による打音量等の制御、及び、打面40aを叩いた後の待機位置による打音量等の制御が可能である。なお、打音量は、スティック41の振り下ろし開始位置、及び振り下ろしスピードに関係する。音の響きは、スティック41の打面40aを叩いた後の待機位置、及び待機時間(打面40aに接触する位置にスティック41が保持される時間)に関係する。テンポは、振り下ろし開始位置及びスティック41の動作スピードに関係する。
【0038】
まず、振り上げ量による打音等の制御について説明する。最初に、上述のように、スティック41を把持した状態で、あらかじめ定められた動作でスティック41を1度振り上げ、ドラム40の打面40aを叩く。そして、このときの打面40aを叩いた衝撃による力を、掌部26に設けられた接触検出センサ27により検出する。さらに、距離センサ17によりラック19bとの浮遊静電容量C1を計測し、これを基準値として検出値記憶部37に記憶させる。なお、センサ間距離d1を検出値記憶部37に記憶させてもよい。
【0039】
そして、所望の打音量、音の響き具合、テンポとなるように、検出値記憶部37に記憶された検出値と、打音量マップ36a、音の響きマップ36b、テンポマップ36cを用いて、データ処理動作制御部35により、スティック41の振り上げ位置、手部20の動作スピードを決定して、各アクチュエータを制御することで打楽器演奏を実現する。
【0040】
次に、打面40aを叩いた後の待機位置による打音量の制御について説明する。まず、上述と同様に、スティック41を把持した状態で、あらかじめ定められた動作でスティック41を1度振り上げ、ドラム40の打面40aを叩く。そして、このときの打面40aを叩いた衝撃による力を、掌部26に設けられた接触検出センサ27により検出する。そして、打面40aに当接する位置の浮遊静電容量C2又はセンサ間距離d2を基準値として記憶する。
【0041】
そして、所望の打音量、音の響き具合、テンポとなるように、マップ記憶部36の各マップを用いて、基準値に±した値を目標値として、打面40aを叩いた後のスティック41の待機位置及び待機時間を決定する。具体的には、基準値より+側に目標値を設定した場合、すなわち、打面40aよりも下側の位置を待機位置とした場合、スティック41で打面40aを叩いた後に、スティック41と打面40aとの接触時間が増加する。これにより、打面40aの振動が抑えられ、打音量が低下し、響きがなくなる。一方、基準値より−側に目標値を設定した場合、すなわち、打面40aよりも上側の位置を待機位置とした場合、スティック41で打面40aを叩いた後に、スティック41は打面40aからすぐに離れ、接触時間が減少する。これにより、打音量が増加し、響きが大きくなる。
【0042】
このように、本発明によれば、検出値記憶部37に記憶された検出値と、マップ記憶部36に記憶されたマップを用いて、所望の打音量、音の響き具合、テンポとなるように、スティックの振り上げ位置、手部20の動作スピード、待機位置、待機時間等を制御するができる。
【0043】
なお、本実施の形態においては、手首関節15に距離センサ17及び変換機構19を設ける構成について説明したが、これに限定されるものではない。例えば、肘関節13や、肩関節11に同様の構成を設けてもよい。図7に、肩関節11、肘関節13、手首関節15に、距離センサ17及び変換機構19を設けた場合の、打楽器を演奏する際のロボットアームの動作の例を示す。図7に示すように、手首関節15に設けた場合と比較すると、肘関節13に設けた場合には、振り上げ位置をさらにドラム40の打面40aから離れた位置にすることができる。また、肩関節11に設けた場合には、さらに振り上げ位置を高くすることができる。このように、腕部10の各関節に同様の機構を設けることにより、打音量の変化レンジを広げることが可能となる。
【0044】
次に、図8を参照してロール演奏を行う場合について説明する。図8は、本実施の形態に係るロボット100において、ロール演奏を行う際のロボットアームの動作を説明する図である。上述したように、ロール演奏を行う場合においても、スティック41を親指部21と、人差し指部22の第3関節−第4関節の間の指節で挟み込むように把持し、残りの中指部23、薬指部24、小指部25をスティック41に添える。中指部23、薬指部24、小指部25は、スティック41のストッパの役割を果たす。掌部26と中指部23、薬指部24、小指部25との間には、所定の距離d3の間隙が設けられている。スティック41は、親指部21と、人差し指部22の第3関節−第4関節の間の指節で把持された点を支点として、掌部26と中指部23、薬指部24、小指部25との間で、回動自在に支持されている。
【0045】
ロール演奏を行う場合、スティック41を振り上げてドラム40の打面40aに向かって振り落とすと、打面40aとの衝突により、スティック41の先端が跳ね上げられる。そして、スティック41の先端は打面40aから離れる方向に上記の支点を中心として回転する。掌部26と中指部23、薬指部24、小指部25との間には所定の距離d3の間隙が設けられており、スティック41の回動範囲が制限されている。このため、打面40aで跳ね上げられたスティック41の後ろ側が、中指部23、薬指部24、小指部25に衝突し、スティック41の先端は再度打面40aに向かって振り下ろされる。
【0046】
これにより、スティック41の先端がドラム40の打面40aに再度衝突し、2打目の打音が発生する。このように、掌部26と中指部23、薬指部24、小指部25との間に間隙を設けることによって、スティック41の可動範囲を規定することにより、1回のストロークで複数の打音を発生するロール演奏を実現することができる。なお、本実施の形態においては、ストッパとして、中指部23、薬指部24、小指部25の3本の指部を備える構成としたが、少なくとも1本あればよい。
【0047】
掌部26と中指部23、薬指部24、小指部25との間の距離d3を変化させることによって、スティック41の回動範囲を制御することができる。すなわち、距離d3を短くすればスティック41の回動範囲が狭くなり、速いテンポでロール演奏することが可能となる。一方、距離d3を長くすれば、スティックの回動範囲が広くなり、テンポを遅くすることができる。距離d3は、中指部23、薬指部24、小指部25を掌部26側に屈曲させることにより変更することができる。
【0048】
接触検出センサ27は、スティック41の後ろ側の接触を検知する。すなわち、接触検出センサ27は、ロール演奏の打撃間隔、すなわち、テンポを検出することができる。ロール演奏テンポマップ36dには、ロール演奏を行う際のロボットに必要な動作に対応するテンポが記憶されている。具体的には、掌部26と中指部23、薬指部24、小指部25との間の距離d3に対応するテンポが記憶されている。
【0049】
ロール演奏を行う場合には、ロール演奏テンポマップ36dを用いて所望のテンポとなるように、掌部26と各指部との間の距離d3を制御することにより、スティック41の回動範囲を変更し、スティック41の打面40aからの反力を利用して演奏することができる。また、接触検出センサ27により検出されたロール演奏の打撃間隔を参照して、距離d3を変更することも可能である。
【0050】
なお、上述の実施の形態では、打楽器の一例としてドラム40を用いた例について説明したが、これに限定されるものではない。これ以外にも、例えば、バスドラム、メロディックタム、フロアタム、ティンパニ、和太鼓といった膜鳴打楽器、シンバル、トライアングル、ゴング、釣鐘、木魚等の体鳴打楽器でもよい。さらに、シロフォン、マリンバを含む木琴や、グラッケンシュピール、ヴィブラフォンを含む鉄琴といった鍵盤打楽器でもよい。さらに、膜面の振動をセンサによって検知し、膜面の振動を信号によって送信し、他の音源で音を生成する電子ドラムであってもよい。
【0051】
複数の打楽器を演奏する場合には、それぞれの楽器について、あらかじめ定められた動作でドラム40の打面40aを叩き、距離センサ17によりラック19bとの浮遊静電容量C1を計測し、これを基準値として検出値記憶部37に記憶させる。そして、所望の打音量、音の響き具合、テンポとなるように、スティックの振り上げ位置、手部20の動作スピードを決定することで打楽器演奏を実現することができる。なお、打楽器の打面位置の認識については、あらかじめ打面の位置を設定しロボットに記憶させてもよいし、カメラ等を設けて形状認識を行ってもよい。
【0052】
また、本発明は、打楽器の演奏を行うロボットに限定されない。例えば、ヴァイオリンの弓を弦に当接させた状態で、掌部26の角度を変更することにより、ヴァイオリンの演奏にも応用することが可能である。もちろん、ヴァイオリンに限定されず、他の弦楽器、例えば、ビオラ、チェロ、コントラバス、ウッドベースなどの擦弦楽器について応用することができる。また、腕部10の振り上げ位置、振り下ろしスピードの制御は、タンバリン等の打楽器の演奏や人の肩たたき等物を把持しない状態での打力制御、包丁を使用した食品を切断する動作等に応用することができる。
【0053】
このように、本発明によれば、打力制御を行うための専用機構(スプリングやスティック固定部品等)をなくし、楽器演奏ロボットによる打楽器演奏を実現することができるとともに、ロボットアームの汎用性向上を実現することができる。
【図面の簡単な説明】
【0054】
【図1】実施の形態に係るロボットの構成を説明する図である。
【図2】実施の形態に係るロボットの手部の構成を示す図である。
【図3】打楽器を演奏する際のロボットアームの動作を説明する図である。
【図4】図3に示すA部の構成を示す図である。
【図5】実施の形態に係るロボットに用いられる距離センサの基準部材との距離と浮遊静電容量の関係を示すグラフである。
【図6】実施の形態に係るロボットの制御部の構成を示すブロック図である
【図7】打楽器を演奏する際のロボットアームの動作の他の例を説明する図である。
【図8】打楽器をロール演奏する際のロボットアームの動作を説明する図である。
【符号の説明】
【0055】
10 腕部
11 肩関節
12 上腕部
13 肘関節
14 前腕部
15 手首関節
16a、16b アクチュエータ
17 距離センサ
18 基準部材
19 変換機構
19a ピニオン
19b ラック
20 手部
21 親指部
22 人差し指部
23 中指部
24 薬指部
25 小指部
26 掌部
27 接触検出センサ
28a、28b 把持検出センサ
30 頭部
31 胴体部
32 制御部
33 車輪
34 演奏データ記憶部
35 データ処理動作制御部
36 マップ記憶部
36a 打音量マップ
36b 音の響きマップ
36c テンポマップ
36d ロール演奏テンポマップ
37 検出値記憶部
40 ドラム
40a 打面
41 スティック
100 ロボット
【特許請求の範囲】
【請求項1】
動作部と、
前記動作部が回動自在に連結された支持部と、
前記動作部の回動運動を直線運動に変換して、移動部材に伝達する変換機構と、
前記移動部材の移動距離を検出する距離センサと、
前記距離センサで検出された前記移動部材の移動距離に基づいて、前記動作部の動作を制御する制御部と、
を備えるロボットアーム。
【請求項2】
前記距離センサは、前記移動部材との間の静電容量の変化により、前記移動部材の移動距離を検出する請求項1に記載のロボットアーム。
【請求項3】
前記動作部は手部であり、
掌部と、
前記掌部に連結された複数の指部と、
前記指部を屈曲させる関節部とを有し、
前記指部を屈曲させることで把持対象を把持する請求項1又は2に記載のロボットアーム。
【請求項4】
前記指部は、第1指部と第2指部を含み、
前記第1指部と前記第2指部との間で挟み込むように把持対象を把持する請求項3に記載のロボットアーム。
【請求項5】
前記複数の指部の少なくとも1箇所に、前記把持対象の把持状態を検出する把持検出センサを備える請求項3又は4に記載のロボットアーム。
【請求項6】
前記指部は、第3指部を含み、
前記掌部に設けられ、前記把持対象の接触を検出する接触検出センサをさらに備え、
前記接触検出センサの検出結果に基づいて、前記掌部と前記第3指部の距離を制御する請求項4又は5に記載のロボットアーム。
【請求項7】
請求項1〜6のいずれか1項に記載のロボットアームを備えるロボット。
【請求項8】
動作部の回動運動を変換して、移動部材に伝達するステップと、
前記移動部材の移動距離を検出するステップと、
前記移動部材の移動距離に基づいて、前記動作部の動作を制御するステップと、
を有するロボットの制御方法。
【請求項1】
動作部と、
前記動作部が回動自在に連結された支持部と、
前記動作部の回動運動を直線運動に変換して、移動部材に伝達する変換機構と、
前記移動部材の移動距離を検出する距離センサと、
前記距離センサで検出された前記移動部材の移動距離に基づいて、前記動作部の動作を制御する制御部と、
を備えるロボットアーム。
【請求項2】
前記距離センサは、前記移動部材との間の静電容量の変化により、前記移動部材の移動距離を検出する請求項1に記載のロボットアーム。
【請求項3】
前記動作部は手部であり、
掌部と、
前記掌部に連結された複数の指部と、
前記指部を屈曲させる関節部とを有し、
前記指部を屈曲させることで把持対象を把持する請求項1又は2に記載のロボットアーム。
【請求項4】
前記指部は、第1指部と第2指部を含み、
前記第1指部と前記第2指部との間で挟み込むように把持対象を把持する請求項3に記載のロボットアーム。
【請求項5】
前記複数の指部の少なくとも1箇所に、前記把持対象の把持状態を検出する把持検出センサを備える請求項3又は4に記載のロボットアーム。
【請求項6】
前記指部は、第3指部を含み、
前記掌部に設けられ、前記把持対象の接触を検出する接触検出センサをさらに備え、
前記接触検出センサの検出結果に基づいて、前記掌部と前記第3指部の距離を制御する請求項4又は5に記載のロボットアーム。
【請求項7】
請求項1〜6のいずれか1項に記載のロボットアームを備えるロボット。
【請求項8】
動作部の回動運動を変換して、移動部材に伝達するステップと、
前記移動部材の移動距離を検出するステップと、
前記移動部材の移動距離に基づいて、前記動作部の動作を制御するステップと、
を有するロボットの制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2009−279728(P2009−279728A)
【公開日】平成21年12月3日(2009.12.3)
【国際特許分類】
【出願番号】特願2008−136352(P2008−136352)
【出願日】平成20年5月26日(2008.5.26)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成21年12月3日(2009.12.3)
【国際特許分類】
【出願日】平成20年5月26日(2008.5.26)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]