
ロボットシステム
【課題】取り扱いが容易でかつ一般社会で十分に活用されるロボットを備えた安価なロボットシステムを提供することである。
【解決手段】携帯電話30が充電器20にセットされると、携帯電話30のコネクタCN2が充電器20のコネクタCN1に電気的に接続される。それにより、携帯電話30と充電器20との間で各種信号および電力が伝送される。CPU32は、充電器20の脱着センサ21、充電器20の充電容量センサ22および時計モジュール34からの信号を受け、メモリ33に記憶された通信制御プログラムに従って通信モジュール31を制御するとともに、メモリ33に記憶されたロボット制御プログラムに従ってロボット10を制御する。
【解決手段】携帯電話30が充電器20にセットされると、携帯電話30のコネクタCN2が充電器20のコネクタCN1に電気的に接続される。それにより、携帯電話30と充電器20との間で各種信号および電力が伝送される。CPU32は、充電器20の脱着センサ21、充電器20の充電容量センサ22および時計モジュール34からの信号を受け、メモリ33に記憶された通信制御プログラムに従って通信モジュール31を制御するとともに、メモリ33に記憶されたロボット制御プログラムに従ってロボット10を制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ロボットを含むロボットシステムに関する。
【背景技術】
【0002】
近年、産業用および家庭用の種々のロボットが開発されている(例えば、特許文献1参照)。一般的に、自律型のロボットは、移動のための駆動機構、複数のセンサおよび各部の制御のためのCPU(中央演算処理装置)等の多数の部品からなるハードウエアと、制御用のプログラム等のソフトウエアとにより構成される。
【特許文献1】特開2002−136772号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
上記のように、一般的な自律型のロボットは、CPU等の多数のハードウエアおよび複雑なソフトウエアを必要とするため、高価である。また、自律的に移動するロボットは、電源としてバッテリを必要とする。そのため、定期的にバッテリを充電する必要がある。これらの結果、従来の自律型のロボットは、産業用を除いて一般社会には、あまり普及していない。
【0004】
本発明の目的は、取り扱いが容易でかつ一般社会で十分に活用されるロボットを備えた安価なロボットシステムを提供することである。
【課題を解決するための手段】
【0005】
(1)本発明に係るロボットシステムは、充電器と、充電器に着脱自在な携帯電話と、充電器と電気的に接続されるロボットとを備え、携帯電話は、通信動作を行う通信手段と、通信手段を制御するとともに、当該携帯電話の状態に対応する信号をロボットに与える処理装置と、通信手段および処理装置に電力を供給するバッテリとを含み、充電器は、携帯電話の処理装置およびバッテリに接続可能な接続部と、電源から電力を受け、接続部を介してバッテリを充電する充電手段とを含み、ロボットは、電源から電力を受け、かつ携帯電話の処理装置と有線または無線通信により接続され、処理装置から与えられる信号に基づく動作を行う動作部を含むものである。
【0006】
本発明に係るロボットシステムにおいては、携帯電話の通信手段により通信動作が行われ、処理装置により通信手段が制御されるとともに、当該携帯電話の状態に対応する信号がロボットに与えられる。また、バッテリにより通信手段および処理装置に電力が供給される。また、充電器の接続部は、携帯電話のバッテリに接続可能となっている。充電手段により接続部を介してバッテリが充電される。ロボットの動作部は、携帯電話の処理装置と有線または無線通信により接続される。動作部により処理装置から与えられる信号に基づく動作が行われる。
【0007】
このようにして、ロボットが携帯電話の状態に応じた動作を行う。すなわち、ロボットが携帯電話の情報を表出するインタフェースとして機能する。それにより、使用者はロボットの動作により携帯電話の状態を容易に把握することができる。また、使用者はロボットの動作により日常生活に精神的な潤いを得ることができる。したがって、携帯電話および充電器の付加価値および利便性が高まる。
【0008】
この場合、ロボットは充電器と共通の電源により動作するので、ロボットにバッテリを設ける必要がない。また、ロボットは充電器に接続された状態で移動する必要がないので、取り扱いが容易である。したがって、一般社会で十分に活用される。
【0009】
さらに、ロボットの動作部は、充電中の携帯電話の処理装置により制御されるので、ロボットに高価な処理装置が不要となる。また、充電中の動作していない携帯電話の処理装置がロボットの制御に有効に利用される。したがって、個人的に使用可能な安価なロボットシステムが実現する。
【0010】
(2)ロボットの動作部は、処理装置から与えられる信号に基づいて身体動作を行う身体動作部を含んでもよい。
【0011】
この場合、ロボットの身体動作部が携帯電話の処理装置から与えられる信号に基づいて携帯電話の状態に応じた身体動作を行う。それにより、使用者はロボットの身体動作部の身体動作により携帯電話の状態を容易に把握することができる。また、使用者はロボットの身体動作により精神的な潤いを得ることができる。
【0012】
(3)ロボットの動作部は、処理装置から与えられる信号に基づいて発話動作を行う発話動作部を含んでもよい。
【0013】
この場合、ロボットの発話動作部が携帯電話の処理装置から与えられる信号に基づいて携帯電話の状態に応じた発話動作を行う。それにより、使用者はロボットの発話動作部の発話動作により携帯電話の状態を容易に把握することができる。また、使用者はロボットの発話動作により精神的な潤いを得ることができる。
【0014】
(4)ロボットは、携帯電話の状態と動作部の動作との対応関係を記憶する記憶手段と、処理装置から与えられる信号および記憶手段に記憶される対応関係に基づいて動作部の動作を制御する制御手段とをさらに含んでもよい。
【0015】
この場合、記憶手段に記憶される対応関係に基づいて動作部の動作が制御される。それにより、記憶手段に記憶される対応関係を更新することにより、携帯電話の状態に基づく動作部の動作を任意に変更することができる。
【0016】
(5)携帯電話の処理装置は、通信手段により受信された情報に基づいて記憶手段に記憶される対応関係を更新してもよい。
【0017】
この場合、携帯電話の通信動作によりロボットの記憶手段に記憶される対応関係を容易に更新することができる。
【0018】
(6)充電器は、携帯電話のバッテリの充電状態を検出する充電状態検出手段をさらに含み、携帯電話の処理装置は、充電状態検出手段により検出された充電状態を示す信号を当該携帯電話の状態に対応する信号としてロボットに与えてもよい。
【0019】
この場合、ロボットの動作部が携帯電話のバッテリの充電状態に応じた動作を行う。それにより、使用者はロボットの動作により携帯電話のバッテリの充電状態を容易に把握することができる。
【0020】
(7)充電器は、当該充電器への携帯電話の脱着状態を検出する脱着状態検出手段をさらに含み、携帯電話の処理装置は、充電状態検出手段により検出された脱着状態を示す信号を当該携帯電話の状態に対応する信号としてロボットに与えてもよい。
【0021】
この場合、ロボットの動作部が充電器への携帯電話の脱着状態に応じた動作を行う。それにより、使用者はロボットの動作により充電器への携帯電話の着脱状態を容易に把握することができる。
【0022】
(8)携帯電話の処理装置は、通信手段の通信状態を示す信号を当該携帯電話の状態に対応する信号としてロボットに与えてもよい。
【0023】
この場合、ロボットの動作部が携帯電話の通信手段の通信状態に応じた動作を行う。それにより、使用者はロボットの動作により携帯電話の通信状態を容易に把握することができる。
【0024】
(9)携帯電話の処理装置は、予め設定された時刻に関する信号を当該携帯電話の状態に対応する信号としてロボットに与えてもよい。
【0025】
この場合、ロボットの動作部が予め設定された時刻に応じた動作を行う。それにより、使用者はロボットの動作により予め設定された時刻を容易に把握することができる。
【0026】
(10)充電器とロボットとは別体として構成されてもよい。それにより、充電器またはロボットを他の充電器または他のロボットと容易に交換することができる。
【0027】
(11)充電器とロボットとは一体的に構成されてもよい。それにより、ロボットおよび充電器の小型化が可能となる。
【発明の効果】
【0028】
本発明によれば、ロボットが携帯電話の状態に応じた動作を行う。すなわち、ロボットが携帯電話の情報を表出するインタフェースとして機能する。それにより、使用者はロボットの動作により携帯電話の状態を容易に把握することができる。また、使用者はロボットの動作により日常生活に精神的な潤いを得ることができる。したがって、携帯電話および充電器の付加価値および利便性が高まる。
【0029】
この場合、ロボットは充電器と共通の電源により動作するので、ロボットにバッテリを設ける必要がない。また、ロボットは充電器に接続された状態で移動する必要がないので、取り扱いが容易である。したがって、一般社会で十分に活用される。
【0030】
さらに、ロボットの動作部は、充電中の携帯電話の処理装置により制御されるので、ロボットに高価な処理装置が不要となる。また、充電中の動作していない処理装置がロボットの制御に有効に利用される。したがって、個人的に使用可能な安価なロボットシステムが実現する。
【発明を実施するための最良の形態】
【0031】
(1)ロボットシステムの構成
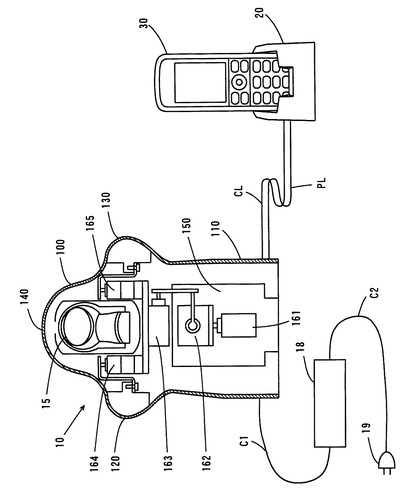
図1は本発明の一実施の形態に係るロボットシステムの構成を示す模式図である。
【0032】
図1のロボットシステムは、ロボット10、充電器20および携帯電話30により構成される。
【0033】
ロボット10は、可撓性の樹脂シート等により形成された外皮100を有する。外皮100は、胴部110、右の突部120、左の突部130および頭部140を有する。胴部110は、略円筒形状を有し、人間の両脚および胴に相当する。突部120,130は、胴部110の両方の側面の上部において凸状に膨らむように形成され、人間の両肩および両腕に相当する。頭部140は、胴部110の上部において半球状に形成され、人間の首および頭に相当する。
【0034】
外皮100内には、スピーカ15、制御用基板150および複数のモータ161〜165が設けられている。
【0035】
モータ161により胴部110が鉛直軸を中心にねじられる。モータ162により突部120,130が上下に揺動される。モータ163により頭部140が前後に揺動される。モータ164により突部120が前後に動かされ、モータ165により突部130が前後に動かされる。
【0036】
ロボット10の制御用基板150には、6V用の電源ケーブルC1、ACアダプタ18および100V用の電源ケーブルC2を介して電源プラグ19が接続されている。
【0037】
充電器20は、制御信号を伝送するための制御ラインCLおよび電力を伝送するための電源ラインPLを通してロボット10の制御用基板150に接続されている。携帯電話30は、充電器20にセット(装着)および取り外し可能になっている。携帯電話30が充電器20にセットされている際に携帯電話30内の後述するバッテリが充電される。
【0038】
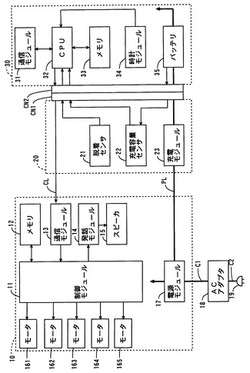
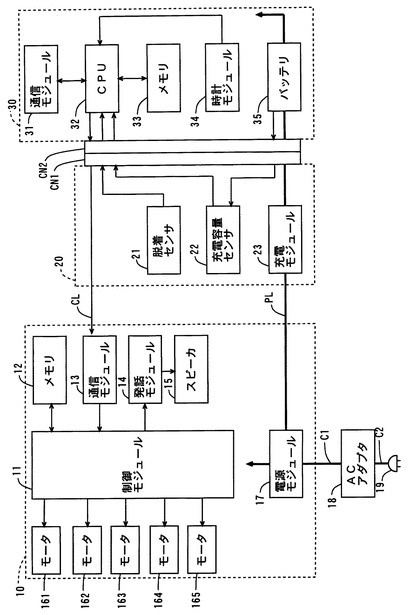
図2は図1のロボットシステムのロボット10、充電器20および携帯電話30の構成を示すブロック図である。
【0039】
図2に示すように、ロボット10は、制御モジュール11、メモリ12、通信モジュール13、発話モジュール14、スピーカ15、複数のモータ161〜165および電源モジュール17を含む。
【0040】
制御モジュール11、メモリ12、通信モジュール13、発話モジュール14および電源モジュール17は、図1の制御用基板150上に設けられる。
【0041】
メモリ12は、例えば半導体メモリからなり、後述する対応テーブルをデータとして記憶する。通信モジュール13は、LSI(大規模集積回路)等により構成され、制御ラインCLを通して伝送される制御信号を受信し、制御モジュール11に与える。制御モジュール11は、デジタル回路およびアナログ回路により構成れる。この制御モジュール11は、モータ161〜165を駆動するためのモータドライバを含み、通信モジュール13から与えられた制御信号に基づいてデータ発話モジュール14およびモータ161〜165を制御するとともに、メモリ12の書き込み動作および読み出し動作を制御する。
【0042】
発話モジュール14は、LSI等により構成され、制御モジュール11の制御に従って音声信号を合成する。スピーカ15は、発話モジュール14により合成された音声信号を音声として出力することにより発話を行う。
【0043】
電源モジュール17は、電源ケーブルC1を通してACアダプタ18に接続され、電力を制御モジュール11、メモリ12、通信モジュール13、発話モジュール14、スピーカ15およびモータ161〜165に供給するとともに、電源ラインPLを通して充電器20に電力を伝送する。
【0044】
充電器20は、脱着センサ21、充電容量センサ22、充電モジュール23およびコネクタCN1を有する。
【0045】
携帯電話30は、通信モジュール31、CPU(中央演算処理装置)32、メモリ33、時計モジュール34、バッテリ35およびコネクタCN2を有する。
【0046】
携帯電話30が充電器20にセットされると、携帯電話30のコネクタCN2が充電器20のコネクタCN1に電気的に接続される。それにより、携帯電話30と充電器20との間で各種信号および電力が伝送される。
【0047】
充電器20の脱着センサ21は、携帯電話30が充電器20にセットされたか否かを検出し、検出結果を示す信号を携帯電話30のCPU32に与える。充電容量センサ22は、携帯電話30内のバッテリ35の充電容量を検出し、検出された充電容量を示す信号を携帯電話30のCPU32に与える。充電モジュール23は、電源ラインPLを介してロボット10の電源モジュール17から供給される電力により携帯電話30内のバッテリ35を充電する。
【0048】
携帯電話30の通信モジュール31は、通信回路、表示装置、複数のキー、スピーカおよびマイクロフォンを含み、他の電話機または携帯電話と通話を行う通話機能、他の携帯電話またはインターネットに接続されるコンピュータと電子メールの送受信を行う電子メール機能、プログラムおよびデータをダウンロードするダウンロード機能およびインターネットのウェブサイトを閲覧する閲覧機能を有する。
【0049】
メモリ33は、半導体メモリからなり、通信モジュール31を制御する通信制御プログラム、ロボット10を制御するロボット制御プログラム、および各種データを記憶する。
【0050】
時計モジュール34は、時計機能を有し、現在の時刻を示す信号をCPU32に与える。CPU32は、充電器20の脱着センサ21、充電器20の充電容量センサ22および時計モジュール34からの信号を受け、メモリ33に記憶された通信制御プログラムに従って通信モジュール31を制御するとともに、メモリ33に記憶されたロボット制御プログラムに従ってロボット10を制御する。
【0051】
バッテリ35は、通信モジュール31、CPU32、メモリ33および時計モジュール34に電力を供給する。
【0052】
(2)対応テーブル
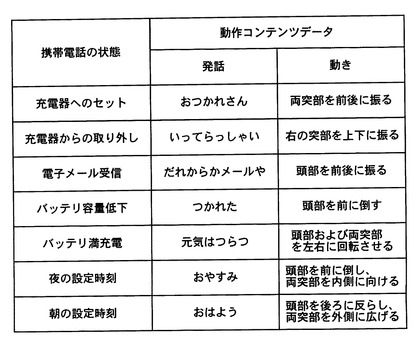
図3はロボット10のメモリ12に記憶される対応テーブルの一例を示す模式図である。
【0053】
図3に示すように、対応テーブルには、携帯電話30の状態と動作コンテンツデータとの対応関係が格納される。本例では、携帯電話30の状態は、充電器20への携帯電話30のセット、充電器20からの携帯電話30の取り外し、通信モジュール31による電子メールの受信、バッテリ35の容量低下、バッテリ35の満充電、夜の設定時刻および朝の設定時刻を含む。
【0054】
動作コンテンツデータは、ロボット10の動作内容を示し、発話モジュール14による発話の内容およびモータ161〜165による外皮100の動きの内容を携帯電話30の状態に対応して含む。例えば、動作コンテンツデータは、携帯電話30の状態が「充電器へのセット」である場合に対応して、発話モジュール14による発話の内容として「おつかれさん」を含み、モータ161〜165による外皮100の動きの内容として「両突部を前後に振る」ことを含む。
【0055】
(3)ロボットシステムの動作
次に、図1および図2のロボットシステムの動作について説明する。図4および図5は携帯電話30のCPU32によるロボット10の制御を示すフローチャートである。
【0056】
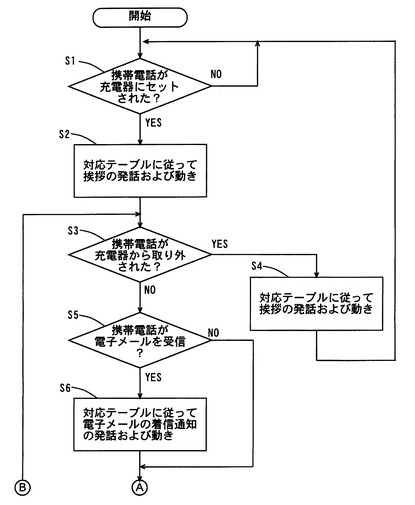
まず、携帯電話30のCPU32は、脱着センサ21からの信号に基づいて携帯電話30が充電器20にセットされたか否かを判別する(ステップS1)。
【0057】
携帯電話30が充電器20にセットされた場合には、CPU32は、制御ラインCLを介してその状態に対応する対応する制御信号をロボット10の通信モジュール13に送信する(ステップS2)。
【0058】
それにより、制御モジュール11がメモリ12に記憶された対応テーブルに従って発話モジュール14およびモータ161〜165を制御し、発話モジュール14によりスピーカ15が挨拶の発話を行うとともに、モータ161〜165により外皮100が挨拶の動きを行う。図3の対応テーブルによれば、ロボット10は、「おつかれさん」と発話し、両突部120,130を前後に振る。
【0059】
その後、CPU32は、脱着センサ21からの信号に基づいて携帯電話30が充電器20から取り外されたか否かを判別する(ステップS3)。
【0060】
携帯電話30が充電器20から取り外された場合には、CPU32は、制御ラインCLを介してその状態に対応する制御信号をロボット10の通信モジュール13に送信する(ステップS4)。この場合、CPU32は、コネクタCN1とコネクタCN2とが完全に離れる前に制御ラインCLを介して制御信号をロボット10に与える。
【0061】
それにより、制御モジュール11がメモリ12に記憶された対応テーブルに従って発話モジュール14およびモータ161〜165を制御し、発話モジュール14によりスピーカ15が挨拶の発話を行うとともに、モータ161〜165により外皮100が挨拶の動きを行う。図3の対応テーブルによれば、ロボット10は、「いってらっしゃい」と発話し、右の突部120を上下に振る。その後、CPU32は、ステップS1に戻る。
【0062】
ステップS3で携帯電話30が充電器20から取り外されていない場合には、CPU32は、通信モジュール31からの信号に基づいて携帯電話30の通信モジュール31が電子メールを受信したか否かを判別する(ステップS5)。
【0063】
通信モジュール31が電子メールを受信した場合には、CPU32は、制御ラインCLを介してその状態に対応する制御信号をロボット10の通信モジュール13に送信する(ステップS6)。
【0064】
それにより、制御モジュール11がメモリ12に記憶された対応テーブルに従って発話モジュール14およびモータ161〜165を制御し、発話モジュール14によりスピーカ15が着信通知の発話を行うとともに、モータ161〜165により外皮100が着信通知の動きを行う。図3の対応テーブルによれば、ロボット10は、「だれからかメールや」と発話し、頭部140を前後に振る。
【0065】
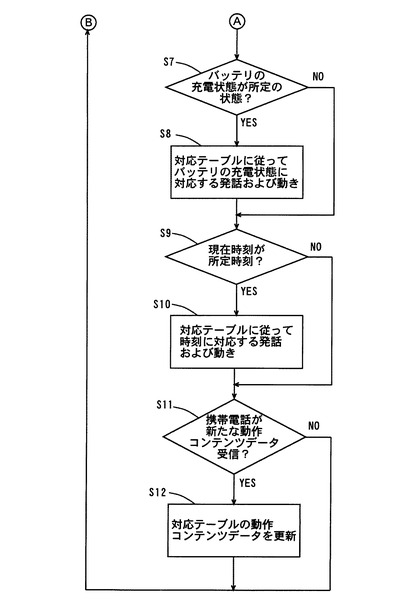
ステップS5で通信モジュール31が電子メールを受信していない場合には、CPU32はステップS7に進む。CPU32は、充電容量センサ22からの信号に基づいて携帯電話30のバッテリ35が所定の充電状態か否かを判別する(ステップS7)。
【0066】
バッテリ35が所定の充電状態である場合には、CPU32は、制御ラインCLを介してその状態に対応する制御信号をロボット10の通信モジュール13に送信する(ステップS8)。
【0067】
それにより、制御モジュール11がメモリ12に記憶された対応テーブルに従って発話モジュール14およびモータ161〜165を制御し、発話モジュール14によりスピーカ15がバッテリ35の充電状態に対応する発話を行うとともに、モータ161〜165により外皮100がバッテリ35の充電状態に対応する動きを行う。図3の対応テーブルによれば、バッテリ35の容量が所定レベルよりも低下すると、ロボット10は、「つかれた」と発話し、頭部140を前に倒す。また、バッテリ35が満充電の状態になると、ロボット10は、「元気はつらつ」と発話し、頭部140および両突部120,130を左右に回転させる。
【0068】
ステップS7でバッテリ35が所定の充電状態にない場合には、CPU32はステップS9に進む。CPU32は、時計モジュール34からの信号に基づいて現在時刻が設定時刻か否かを判別する(ステップS9)。設定時刻は、使用者が予め携帯電話30を用いて設定することができる。この設定時刻は、メモリ33に記憶される。
【0069】
現在時刻が設定時刻である場合には、CPU32は、制御ラインCLを介してその状態に対応する制御信号をロボット10の通信モジュール13に送信する(ステップS10)。
【0070】
それにより、制御モジュール11がメモリ12に記憶された対応テーブルに従ってロボット10が設定時刻に対応する発話および動きを行うように発話モジュール14およびモータ161〜165を制御し、発話モジュール14によりスピーカ15が設定時刻に対応する発話を行うとともに、モータ161〜165により外皮100が設定時刻に対応する動きを行う。図3の対応テーブルによれば、現在時刻が夜の設定時刻になると、ロボット10は、「おやすみ」と発話し、頭部140を前に倒し、両突部120,130を内側に向ける。また、現在時刻が朝の設定時刻になると、ロボット10は、「おはよう」と発話し、頭部140を後ろに反らし、両突部120,130を外側に広げる。
【0071】
ステップS9で現在時刻が設定時刻でない場合には、CPU32はステップS11に進む。CPU32は、通信モジュール31が新たな動作コンテンツデータを受信したか否かを判別する(ステップS11)。
【0072】
通信モジュール31が新たな動作コンテンツデータを受信した場合には、CPU32は、ロボット10の通信モジュール31に新たなコンテンツデータを送信し、メモリ12に記憶される対応テーブルの動作コンテンツデータを新たな動作コンテンツデータで更新する(ステップS12)。
【0073】
ステップS11で通信モジュール31が新たな動作コンテンツデータを受信していない場合には、CPU32はステップS3に戻る。
【0074】
このようにして、ロボット10は、携帯電話30の状態に応じた発話および動きを行う。
【0075】
(4)実施の形態の効果
本実施の形態に係るロボットシステムにおいては、ロボット10の外皮100が携帯電話30のCPU32から与えられる信号に基づいて携帯電話30の状態に応じた動きを行う。また、ロボット10のスピーカ15が携帯電話30のCPU31から与えられる信号に基づいて携帯電話30の状態に応じた発話を行う。すなわち、ロボット10が携帯電話30の情報を表出するインタフェースとして機能する。それにより、使用者はロボット10の動きまたは発話により携帯電話30の状態を容易に把握することができる。また、使用者はロボット10の動きおよび発話により日常生活に精神的な潤いを得ることができる。したがって、携帯電話30および充電器20の付加価値および利便性が高まる。
【0076】
この場合、ロボット10は充電器20と共通の電源により動作するので、ロボット10にバッテリを設ける必要がない。また、ロボット10は充電器20に接続された状態で移動する必要がないので、取り扱いが容易である。したがって、一般社会で十分に活用される。
【0077】
さらに、ロボット10の発話モジュール14およびモータ161〜165は、充電中の携帯電話30のCPU32により制御されるので、ロボット10に高価なCPUが不要となる。また、充電中で動作していない携帯電話30のCPU32がロボット10の制御に有効に利用される。したがって、個人的に使用可能な安価なロボットシステムが実現する。
【0078】
また、ロボット10のメモリ12に記憶される対応テーブルに基づいてロボット10の動きおよび発話が制御される。この場合、携帯電話30の通信動作によりロボット10のメモリ12に記憶される対応テーブルの動作コンテンツデータを容易に更新することができる。したがって、メモリ12に記憶される対応テーブルを更新することにより、携帯電話30の状態に基づくロボット10の動きおよび発話を任意に変更することができる。
【0079】
さらに、携帯電話30のCPU32は、脱着センサ21の検出結果に基づく制御信号を充電器20を介してロボット10に与える。この場合、ロボット10が充電器20への携帯電話10の脱着状態に応じた動きおよび発話を行う。それにより、使用者はロボット10の動きまたは発話により充電器20への携帯電話10の着脱状態を容易に把握することができる。
【0080】
また、携帯電話30のCPU32は、充電容量センサ22の検出結果に基づく制御信号を充電器20を介してロボット10に与える。この場合、ロボット10が携帯電話30のバッテリ35の充電状態に応じた動きおよび発話を行う。それにより、使用者はロボット10の動きまたは発話により携帯電話30のバッテリ35の充電状態を容易に把握することができる。
【0081】
また、携帯電話30のCPU32は、通信モジュール31の通信状態に基づく制御信号を充電器20を介してロボット10に与える。この場合、ロボット10が携帯電話10の通信モジュール31の通信状態に応じた動きおよび発話を行う。それにより、使用者はロボット10の動きまたは発話により携帯電話30の通信状態を容易に把握することができる。
【0082】
携帯電話30のCPU32は、設定時刻に基づく制御信号を充電器20を介してロボット10に与える。この場合、ロボット10が設定時刻に応じた動きおよび発話を行う。それにより、使用者はロボット10の動きまたは発話により設定時刻を容易に把握することができる。
【0083】
(5)他の実施の形態
(A)上記実施の形態では、ロボット10が充電器20とは別体として構成されているが、ロボット10が充電器20と一体的に構成されてもよい。例えば、ロボット10がカンガルーの形態を有し、カンガルーのポケットに充電器20が設けられる。この場合、カンガルーのポケットに携帯電話30をセットすることにより、携帯電話30が充電器20により充電される。
【0084】
(B)メモリ12に記憶される対応テーブルを一定時間ごとに自動的に更新することによりロボット10の動きまたは発話を一定時間ごとに変更してもよい。例えば、対応テーブルを毎日更新することにより、ロボット10の発話の内容を毎日変更してもよい。
【0085】
(C)ロボット10または充電器20に人の有無を検出する距離センサ、人センサ等の人体センサを設け、CPU32が人体センサからの信号に基づいてロボット10の動きおよび発話を制御してもよい。
【0086】
(D)上記実施の形態では、充電器20と携帯電話30とがコネクタCN1,CN2により電気的に接続されているが、充電器20と携帯電話30との間で信号を光学的に伝送してもよい。または、充電器20と携帯電話30との間で信号を無線通信により伝送してもよい。
【0087】
(E)ロボット10または充電器20に周囲の明るさを検出する光センサを設け、CPU32が光センサからの信号に基づいて就寝または起床の時刻を判別し、判別結果に基づいてロボット10の動きおよび発話を制御してもよい。
【0088】
(F)ロボット10に表示装置を設け、携帯電話30の状態に基づく動作としてロボット10の表情を表示装置に表示してもよい。
【0089】
(6)実施の形態の各部と請求項の構成要素との対応
上記実施の形態では、通信モジュール31が通信手段に相当し、CPU32が処理装置に相当し、コネクタCN1が接続部に相当し、充電モジュール23が充電手段に相当し、制御モジュール11、発話モジュール14、スピーカ15、モータ161〜165および外皮100が動作部に相当する。また、制御モジュール11、モータ161〜165および外皮100が身体動作部に相当し、制御モジュール11、発話モジュール14およびスピーカ15が発話動作部に相当する。外皮100の動きが身体動作に相当し、スピーカ15からの発話が発話動作に相当する。
【0090】
また、メモリ12が記憶手段に相当し、対応テーブルが対応関係に相当し、制御モジュール11が制御手段に相当する。充電容量センサ22が充電状態検出手段に相当し、脱着センサ21が脱着状態検出手段に相当する。バッテリ25の充電容量が所定レベルよりも低下したことまたはバッテリ25が満充電状態になったことがバッテリ35の充電状態に相当し、携帯電話30が充電器20にセットされたことおよび携帯電話30が充電器20から取り外されたことが充電器への携帯電話の脱着状態に相当し、通信モジュール31による電子メールの受信が通信手段の通信状態に相当し、設定時刻が予め設定された時刻に相当する。
【産業上の利用可能性】
【0091】
本発明は、家庭、職場等において日常生活を精神的に潤すパーソナルなロボットシステム等に利用することができる。
【図面の簡単な説明】
【0092】
【図1】本発明の一実施の形態に係るロボットシステムの構成を示す模式図である。
【図2】図1のロボットシステムのロボット、充電器および携帯電話の構成を示すブロック図である。
【図3】ロボットのメモリに記憶される対応テーブルの一例を示す模式図である。
【図4】携帯電話のCPUによるロボットの制御を示すフローチャートである。
【図5】携帯電話のCPUによるロボットの制御を示すフローチャートである。
【符号の説明】
【0093】
10 ロボット
11 制御モジュール
12 メモリ
13 通信モジュール
14 発話モジュール
15 スピーカ
17 電源モジュール
18 ACアダプタ
19 電源プラグ
20 充電器
21 脱着センサ
22 充電容量センサ
23 充電モジュール
30 携帯電話
31 通信モジュール
32 CPU(中央演算処理装置)
33 メモリ
34 時計モジュール
35 バッテリ
100 外皮
110 胴部
120 右の突部
130 左の突部
140 頭部
150 制御用基板
161〜165 複数のモータ
C1 6V用の電源ケーブル
C2 100V用の電源ケーブル
CL 制御ライン
PL 電源ライン
CN1,CN2 コネクタ
【技術分野】
【0001】
本発明は、ロボットを含むロボットシステムに関する。
【背景技術】
【0002】
近年、産業用および家庭用の種々のロボットが開発されている(例えば、特許文献1参照)。一般的に、自律型のロボットは、移動のための駆動機構、複数のセンサおよび各部の制御のためのCPU(中央演算処理装置)等の多数の部品からなるハードウエアと、制御用のプログラム等のソフトウエアとにより構成される。
【特許文献1】特開2002−136772号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
上記のように、一般的な自律型のロボットは、CPU等の多数のハードウエアおよび複雑なソフトウエアを必要とするため、高価である。また、自律的に移動するロボットは、電源としてバッテリを必要とする。そのため、定期的にバッテリを充電する必要がある。これらの結果、従来の自律型のロボットは、産業用を除いて一般社会には、あまり普及していない。
【0004】
本発明の目的は、取り扱いが容易でかつ一般社会で十分に活用されるロボットを備えた安価なロボットシステムを提供することである。
【課題を解決するための手段】
【0005】
(1)本発明に係るロボットシステムは、充電器と、充電器に着脱自在な携帯電話と、充電器と電気的に接続されるロボットとを備え、携帯電話は、通信動作を行う通信手段と、通信手段を制御するとともに、当該携帯電話の状態に対応する信号をロボットに与える処理装置と、通信手段および処理装置に電力を供給するバッテリとを含み、充電器は、携帯電話の処理装置およびバッテリに接続可能な接続部と、電源から電力を受け、接続部を介してバッテリを充電する充電手段とを含み、ロボットは、電源から電力を受け、かつ携帯電話の処理装置と有線または無線通信により接続され、処理装置から与えられる信号に基づく動作を行う動作部を含むものである。
【0006】
本発明に係るロボットシステムにおいては、携帯電話の通信手段により通信動作が行われ、処理装置により通信手段が制御されるとともに、当該携帯電話の状態に対応する信号がロボットに与えられる。また、バッテリにより通信手段および処理装置に電力が供給される。また、充電器の接続部は、携帯電話のバッテリに接続可能となっている。充電手段により接続部を介してバッテリが充電される。ロボットの動作部は、携帯電話の処理装置と有線または無線通信により接続される。動作部により処理装置から与えられる信号に基づく動作が行われる。
【0007】
このようにして、ロボットが携帯電話の状態に応じた動作を行う。すなわち、ロボットが携帯電話の情報を表出するインタフェースとして機能する。それにより、使用者はロボットの動作により携帯電話の状態を容易に把握することができる。また、使用者はロボットの動作により日常生活に精神的な潤いを得ることができる。したがって、携帯電話および充電器の付加価値および利便性が高まる。
【0008】
この場合、ロボットは充電器と共通の電源により動作するので、ロボットにバッテリを設ける必要がない。また、ロボットは充電器に接続された状態で移動する必要がないので、取り扱いが容易である。したがって、一般社会で十分に活用される。
【0009】
さらに、ロボットの動作部は、充電中の携帯電話の処理装置により制御されるので、ロボットに高価な処理装置が不要となる。また、充電中の動作していない携帯電話の処理装置がロボットの制御に有効に利用される。したがって、個人的に使用可能な安価なロボットシステムが実現する。
【0010】
(2)ロボットの動作部は、処理装置から与えられる信号に基づいて身体動作を行う身体動作部を含んでもよい。
【0011】
この場合、ロボットの身体動作部が携帯電話の処理装置から与えられる信号に基づいて携帯電話の状態に応じた身体動作を行う。それにより、使用者はロボットの身体動作部の身体動作により携帯電話の状態を容易に把握することができる。また、使用者はロボットの身体動作により精神的な潤いを得ることができる。
【0012】
(3)ロボットの動作部は、処理装置から与えられる信号に基づいて発話動作を行う発話動作部を含んでもよい。
【0013】
この場合、ロボットの発話動作部が携帯電話の処理装置から与えられる信号に基づいて携帯電話の状態に応じた発話動作を行う。それにより、使用者はロボットの発話動作部の発話動作により携帯電話の状態を容易に把握することができる。また、使用者はロボットの発話動作により精神的な潤いを得ることができる。
【0014】
(4)ロボットは、携帯電話の状態と動作部の動作との対応関係を記憶する記憶手段と、処理装置から与えられる信号および記憶手段に記憶される対応関係に基づいて動作部の動作を制御する制御手段とをさらに含んでもよい。
【0015】
この場合、記憶手段に記憶される対応関係に基づいて動作部の動作が制御される。それにより、記憶手段に記憶される対応関係を更新することにより、携帯電話の状態に基づく動作部の動作を任意に変更することができる。
【0016】
(5)携帯電話の処理装置は、通信手段により受信された情報に基づいて記憶手段に記憶される対応関係を更新してもよい。
【0017】
この場合、携帯電話の通信動作によりロボットの記憶手段に記憶される対応関係を容易に更新することができる。
【0018】
(6)充電器は、携帯電話のバッテリの充電状態を検出する充電状態検出手段をさらに含み、携帯電話の処理装置は、充電状態検出手段により検出された充電状態を示す信号を当該携帯電話の状態に対応する信号としてロボットに与えてもよい。
【0019】
この場合、ロボットの動作部が携帯電話のバッテリの充電状態に応じた動作を行う。それにより、使用者はロボットの動作により携帯電話のバッテリの充電状態を容易に把握することができる。
【0020】
(7)充電器は、当該充電器への携帯電話の脱着状態を検出する脱着状態検出手段をさらに含み、携帯電話の処理装置は、充電状態検出手段により検出された脱着状態を示す信号を当該携帯電話の状態に対応する信号としてロボットに与えてもよい。
【0021】
この場合、ロボットの動作部が充電器への携帯電話の脱着状態に応じた動作を行う。それにより、使用者はロボットの動作により充電器への携帯電話の着脱状態を容易に把握することができる。
【0022】
(8)携帯電話の処理装置は、通信手段の通信状態を示す信号を当該携帯電話の状態に対応する信号としてロボットに与えてもよい。
【0023】
この場合、ロボットの動作部が携帯電話の通信手段の通信状態に応じた動作を行う。それにより、使用者はロボットの動作により携帯電話の通信状態を容易に把握することができる。
【0024】
(9)携帯電話の処理装置は、予め設定された時刻に関する信号を当該携帯電話の状態に対応する信号としてロボットに与えてもよい。
【0025】
この場合、ロボットの動作部が予め設定された時刻に応じた動作を行う。それにより、使用者はロボットの動作により予め設定された時刻を容易に把握することができる。
【0026】
(10)充電器とロボットとは別体として構成されてもよい。それにより、充電器またはロボットを他の充電器または他のロボットと容易に交換することができる。
【0027】
(11)充電器とロボットとは一体的に構成されてもよい。それにより、ロボットおよび充電器の小型化が可能となる。
【発明の効果】
【0028】
本発明によれば、ロボットが携帯電話の状態に応じた動作を行う。すなわち、ロボットが携帯電話の情報を表出するインタフェースとして機能する。それにより、使用者はロボットの動作により携帯電話の状態を容易に把握することができる。また、使用者はロボットの動作により日常生活に精神的な潤いを得ることができる。したがって、携帯電話および充電器の付加価値および利便性が高まる。
【0029】
この場合、ロボットは充電器と共通の電源により動作するので、ロボットにバッテリを設ける必要がない。また、ロボットは充電器に接続された状態で移動する必要がないので、取り扱いが容易である。したがって、一般社会で十分に活用される。
【0030】
さらに、ロボットの動作部は、充電中の携帯電話の処理装置により制御されるので、ロボットに高価な処理装置が不要となる。また、充電中の動作していない処理装置がロボットの制御に有効に利用される。したがって、個人的に使用可能な安価なロボットシステムが実現する。
【発明を実施するための最良の形態】
【0031】
(1)ロボットシステムの構成
図1は本発明の一実施の形態に係るロボットシステムの構成を示す模式図である。
【0032】
図1のロボットシステムは、ロボット10、充電器20および携帯電話30により構成される。
【0033】
ロボット10は、可撓性の樹脂シート等により形成された外皮100を有する。外皮100は、胴部110、右の突部120、左の突部130および頭部140を有する。胴部110は、略円筒形状を有し、人間の両脚および胴に相当する。突部120,130は、胴部110の両方の側面の上部において凸状に膨らむように形成され、人間の両肩および両腕に相当する。頭部140は、胴部110の上部において半球状に形成され、人間の首および頭に相当する。
【0034】
外皮100内には、スピーカ15、制御用基板150および複数のモータ161〜165が設けられている。
【0035】
モータ161により胴部110が鉛直軸を中心にねじられる。モータ162により突部120,130が上下に揺動される。モータ163により頭部140が前後に揺動される。モータ164により突部120が前後に動かされ、モータ165により突部130が前後に動かされる。
【0036】
ロボット10の制御用基板150には、6V用の電源ケーブルC1、ACアダプタ18および100V用の電源ケーブルC2を介して電源プラグ19が接続されている。
【0037】
充電器20は、制御信号を伝送するための制御ラインCLおよび電力を伝送するための電源ラインPLを通してロボット10の制御用基板150に接続されている。携帯電話30は、充電器20にセット(装着)および取り外し可能になっている。携帯電話30が充電器20にセットされている際に携帯電話30内の後述するバッテリが充電される。
【0038】
図2は図1のロボットシステムのロボット10、充電器20および携帯電話30の構成を示すブロック図である。
【0039】
図2に示すように、ロボット10は、制御モジュール11、メモリ12、通信モジュール13、発話モジュール14、スピーカ15、複数のモータ161〜165および電源モジュール17を含む。
【0040】
制御モジュール11、メモリ12、通信モジュール13、発話モジュール14および電源モジュール17は、図1の制御用基板150上に設けられる。
【0041】
メモリ12は、例えば半導体メモリからなり、後述する対応テーブルをデータとして記憶する。通信モジュール13は、LSI(大規模集積回路)等により構成され、制御ラインCLを通して伝送される制御信号を受信し、制御モジュール11に与える。制御モジュール11は、デジタル回路およびアナログ回路により構成れる。この制御モジュール11は、モータ161〜165を駆動するためのモータドライバを含み、通信モジュール13から与えられた制御信号に基づいてデータ発話モジュール14およびモータ161〜165を制御するとともに、メモリ12の書き込み動作および読み出し動作を制御する。
【0042】
発話モジュール14は、LSI等により構成され、制御モジュール11の制御に従って音声信号を合成する。スピーカ15は、発話モジュール14により合成された音声信号を音声として出力することにより発話を行う。
【0043】
電源モジュール17は、電源ケーブルC1を通してACアダプタ18に接続され、電力を制御モジュール11、メモリ12、通信モジュール13、発話モジュール14、スピーカ15およびモータ161〜165に供給するとともに、電源ラインPLを通して充電器20に電力を伝送する。
【0044】
充電器20は、脱着センサ21、充電容量センサ22、充電モジュール23およびコネクタCN1を有する。
【0045】
携帯電話30は、通信モジュール31、CPU(中央演算処理装置)32、メモリ33、時計モジュール34、バッテリ35およびコネクタCN2を有する。
【0046】
携帯電話30が充電器20にセットされると、携帯電話30のコネクタCN2が充電器20のコネクタCN1に電気的に接続される。それにより、携帯電話30と充電器20との間で各種信号および電力が伝送される。
【0047】
充電器20の脱着センサ21は、携帯電話30が充電器20にセットされたか否かを検出し、検出結果を示す信号を携帯電話30のCPU32に与える。充電容量センサ22は、携帯電話30内のバッテリ35の充電容量を検出し、検出された充電容量を示す信号を携帯電話30のCPU32に与える。充電モジュール23は、電源ラインPLを介してロボット10の電源モジュール17から供給される電力により携帯電話30内のバッテリ35を充電する。
【0048】
携帯電話30の通信モジュール31は、通信回路、表示装置、複数のキー、スピーカおよびマイクロフォンを含み、他の電話機または携帯電話と通話を行う通話機能、他の携帯電話またはインターネットに接続されるコンピュータと電子メールの送受信を行う電子メール機能、プログラムおよびデータをダウンロードするダウンロード機能およびインターネットのウェブサイトを閲覧する閲覧機能を有する。
【0049】
メモリ33は、半導体メモリからなり、通信モジュール31を制御する通信制御プログラム、ロボット10を制御するロボット制御プログラム、および各種データを記憶する。
【0050】
時計モジュール34は、時計機能を有し、現在の時刻を示す信号をCPU32に与える。CPU32は、充電器20の脱着センサ21、充電器20の充電容量センサ22および時計モジュール34からの信号を受け、メモリ33に記憶された通信制御プログラムに従って通信モジュール31を制御するとともに、メモリ33に記憶されたロボット制御プログラムに従ってロボット10を制御する。
【0051】
バッテリ35は、通信モジュール31、CPU32、メモリ33および時計モジュール34に電力を供給する。
【0052】
(2)対応テーブル
図3はロボット10のメモリ12に記憶される対応テーブルの一例を示す模式図である。
【0053】
図3に示すように、対応テーブルには、携帯電話30の状態と動作コンテンツデータとの対応関係が格納される。本例では、携帯電話30の状態は、充電器20への携帯電話30のセット、充電器20からの携帯電話30の取り外し、通信モジュール31による電子メールの受信、バッテリ35の容量低下、バッテリ35の満充電、夜の設定時刻および朝の設定時刻を含む。
【0054】
動作コンテンツデータは、ロボット10の動作内容を示し、発話モジュール14による発話の内容およびモータ161〜165による外皮100の動きの内容を携帯電話30の状態に対応して含む。例えば、動作コンテンツデータは、携帯電話30の状態が「充電器へのセット」である場合に対応して、発話モジュール14による発話の内容として「おつかれさん」を含み、モータ161〜165による外皮100の動きの内容として「両突部を前後に振る」ことを含む。
【0055】
(3)ロボットシステムの動作
次に、図1および図2のロボットシステムの動作について説明する。図4および図5は携帯電話30のCPU32によるロボット10の制御を示すフローチャートである。
【0056】
まず、携帯電話30のCPU32は、脱着センサ21からの信号に基づいて携帯電話30が充電器20にセットされたか否かを判別する(ステップS1)。
【0057】
携帯電話30が充電器20にセットされた場合には、CPU32は、制御ラインCLを介してその状態に対応する対応する制御信号をロボット10の通信モジュール13に送信する(ステップS2)。
【0058】
それにより、制御モジュール11がメモリ12に記憶された対応テーブルに従って発話モジュール14およびモータ161〜165を制御し、発話モジュール14によりスピーカ15が挨拶の発話を行うとともに、モータ161〜165により外皮100が挨拶の動きを行う。図3の対応テーブルによれば、ロボット10は、「おつかれさん」と発話し、両突部120,130を前後に振る。
【0059】
その後、CPU32は、脱着センサ21からの信号に基づいて携帯電話30が充電器20から取り外されたか否かを判別する(ステップS3)。
【0060】
携帯電話30が充電器20から取り外された場合には、CPU32は、制御ラインCLを介してその状態に対応する制御信号をロボット10の通信モジュール13に送信する(ステップS4)。この場合、CPU32は、コネクタCN1とコネクタCN2とが完全に離れる前に制御ラインCLを介して制御信号をロボット10に与える。
【0061】
それにより、制御モジュール11がメモリ12に記憶された対応テーブルに従って発話モジュール14およびモータ161〜165を制御し、発話モジュール14によりスピーカ15が挨拶の発話を行うとともに、モータ161〜165により外皮100が挨拶の動きを行う。図3の対応テーブルによれば、ロボット10は、「いってらっしゃい」と発話し、右の突部120を上下に振る。その後、CPU32は、ステップS1に戻る。
【0062】
ステップS3で携帯電話30が充電器20から取り外されていない場合には、CPU32は、通信モジュール31からの信号に基づいて携帯電話30の通信モジュール31が電子メールを受信したか否かを判別する(ステップS5)。
【0063】
通信モジュール31が電子メールを受信した場合には、CPU32は、制御ラインCLを介してその状態に対応する制御信号をロボット10の通信モジュール13に送信する(ステップS6)。
【0064】
それにより、制御モジュール11がメモリ12に記憶された対応テーブルに従って発話モジュール14およびモータ161〜165を制御し、発話モジュール14によりスピーカ15が着信通知の発話を行うとともに、モータ161〜165により外皮100が着信通知の動きを行う。図3の対応テーブルによれば、ロボット10は、「だれからかメールや」と発話し、頭部140を前後に振る。
【0065】
ステップS5で通信モジュール31が電子メールを受信していない場合には、CPU32はステップS7に進む。CPU32は、充電容量センサ22からの信号に基づいて携帯電話30のバッテリ35が所定の充電状態か否かを判別する(ステップS7)。
【0066】
バッテリ35が所定の充電状態である場合には、CPU32は、制御ラインCLを介してその状態に対応する制御信号をロボット10の通信モジュール13に送信する(ステップS8)。
【0067】
それにより、制御モジュール11がメモリ12に記憶された対応テーブルに従って発話モジュール14およびモータ161〜165を制御し、発話モジュール14によりスピーカ15がバッテリ35の充電状態に対応する発話を行うとともに、モータ161〜165により外皮100がバッテリ35の充電状態に対応する動きを行う。図3の対応テーブルによれば、バッテリ35の容量が所定レベルよりも低下すると、ロボット10は、「つかれた」と発話し、頭部140を前に倒す。また、バッテリ35が満充電の状態になると、ロボット10は、「元気はつらつ」と発話し、頭部140および両突部120,130を左右に回転させる。
【0068】
ステップS7でバッテリ35が所定の充電状態にない場合には、CPU32はステップS9に進む。CPU32は、時計モジュール34からの信号に基づいて現在時刻が設定時刻か否かを判別する(ステップS9)。設定時刻は、使用者が予め携帯電話30を用いて設定することができる。この設定時刻は、メモリ33に記憶される。
【0069】
現在時刻が設定時刻である場合には、CPU32は、制御ラインCLを介してその状態に対応する制御信号をロボット10の通信モジュール13に送信する(ステップS10)。
【0070】
それにより、制御モジュール11がメモリ12に記憶された対応テーブルに従ってロボット10が設定時刻に対応する発話および動きを行うように発話モジュール14およびモータ161〜165を制御し、発話モジュール14によりスピーカ15が設定時刻に対応する発話を行うとともに、モータ161〜165により外皮100が設定時刻に対応する動きを行う。図3の対応テーブルによれば、現在時刻が夜の設定時刻になると、ロボット10は、「おやすみ」と発話し、頭部140を前に倒し、両突部120,130を内側に向ける。また、現在時刻が朝の設定時刻になると、ロボット10は、「おはよう」と発話し、頭部140を後ろに反らし、両突部120,130を外側に広げる。
【0071】
ステップS9で現在時刻が設定時刻でない場合には、CPU32はステップS11に進む。CPU32は、通信モジュール31が新たな動作コンテンツデータを受信したか否かを判別する(ステップS11)。
【0072】
通信モジュール31が新たな動作コンテンツデータを受信した場合には、CPU32は、ロボット10の通信モジュール31に新たなコンテンツデータを送信し、メモリ12に記憶される対応テーブルの動作コンテンツデータを新たな動作コンテンツデータで更新する(ステップS12)。
【0073】
ステップS11で通信モジュール31が新たな動作コンテンツデータを受信していない場合には、CPU32はステップS3に戻る。
【0074】
このようにして、ロボット10は、携帯電話30の状態に応じた発話および動きを行う。
【0075】
(4)実施の形態の効果
本実施の形態に係るロボットシステムにおいては、ロボット10の外皮100が携帯電話30のCPU32から与えられる信号に基づいて携帯電話30の状態に応じた動きを行う。また、ロボット10のスピーカ15が携帯電話30のCPU31から与えられる信号に基づいて携帯電話30の状態に応じた発話を行う。すなわち、ロボット10が携帯電話30の情報を表出するインタフェースとして機能する。それにより、使用者はロボット10の動きまたは発話により携帯電話30の状態を容易に把握することができる。また、使用者はロボット10の動きおよび発話により日常生活に精神的な潤いを得ることができる。したがって、携帯電話30および充電器20の付加価値および利便性が高まる。
【0076】
この場合、ロボット10は充電器20と共通の電源により動作するので、ロボット10にバッテリを設ける必要がない。また、ロボット10は充電器20に接続された状態で移動する必要がないので、取り扱いが容易である。したがって、一般社会で十分に活用される。
【0077】
さらに、ロボット10の発話モジュール14およびモータ161〜165は、充電中の携帯電話30のCPU32により制御されるので、ロボット10に高価なCPUが不要となる。また、充電中で動作していない携帯電話30のCPU32がロボット10の制御に有効に利用される。したがって、個人的に使用可能な安価なロボットシステムが実現する。
【0078】
また、ロボット10のメモリ12に記憶される対応テーブルに基づいてロボット10の動きおよび発話が制御される。この場合、携帯電話30の通信動作によりロボット10のメモリ12に記憶される対応テーブルの動作コンテンツデータを容易に更新することができる。したがって、メモリ12に記憶される対応テーブルを更新することにより、携帯電話30の状態に基づくロボット10の動きおよび発話を任意に変更することができる。
【0079】
さらに、携帯電話30のCPU32は、脱着センサ21の検出結果に基づく制御信号を充電器20を介してロボット10に与える。この場合、ロボット10が充電器20への携帯電話10の脱着状態に応じた動きおよび発話を行う。それにより、使用者はロボット10の動きまたは発話により充電器20への携帯電話10の着脱状態を容易に把握することができる。
【0080】
また、携帯電話30のCPU32は、充電容量センサ22の検出結果に基づく制御信号を充電器20を介してロボット10に与える。この場合、ロボット10が携帯電話30のバッテリ35の充電状態に応じた動きおよび発話を行う。それにより、使用者はロボット10の動きまたは発話により携帯電話30のバッテリ35の充電状態を容易に把握することができる。
【0081】
また、携帯電話30のCPU32は、通信モジュール31の通信状態に基づく制御信号を充電器20を介してロボット10に与える。この場合、ロボット10が携帯電話10の通信モジュール31の通信状態に応じた動きおよび発話を行う。それにより、使用者はロボット10の動きまたは発話により携帯電話30の通信状態を容易に把握することができる。
【0082】
携帯電話30のCPU32は、設定時刻に基づく制御信号を充電器20を介してロボット10に与える。この場合、ロボット10が設定時刻に応じた動きおよび発話を行う。それにより、使用者はロボット10の動きまたは発話により設定時刻を容易に把握することができる。
【0083】
(5)他の実施の形態
(A)上記実施の形態では、ロボット10が充電器20とは別体として構成されているが、ロボット10が充電器20と一体的に構成されてもよい。例えば、ロボット10がカンガルーの形態を有し、カンガルーのポケットに充電器20が設けられる。この場合、カンガルーのポケットに携帯電話30をセットすることにより、携帯電話30が充電器20により充電される。
【0084】
(B)メモリ12に記憶される対応テーブルを一定時間ごとに自動的に更新することによりロボット10の動きまたは発話を一定時間ごとに変更してもよい。例えば、対応テーブルを毎日更新することにより、ロボット10の発話の内容を毎日変更してもよい。
【0085】
(C)ロボット10または充電器20に人の有無を検出する距離センサ、人センサ等の人体センサを設け、CPU32が人体センサからの信号に基づいてロボット10の動きおよび発話を制御してもよい。
【0086】
(D)上記実施の形態では、充電器20と携帯電話30とがコネクタCN1,CN2により電気的に接続されているが、充電器20と携帯電話30との間で信号を光学的に伝送してもよい。または、充電器20と携帯電話30との間で信号を無線通信により伝送してもよい。
【0087】
(E)ロボット10または充電器20に周囲の明るさを検出する光センサを設け、CPU32が光センサからの信号に基づいて就寝または起床の時刻を判別し、判別結果に基づいてロボット10の動きおよび発話を制御してもよい。
【0088】
(F)ロボット10に表示装置を設け、携帯電話30の状態に基づく動作としてロボット10の表情を表示装置に表示してもよい。
【0089】
(6)実施の形態の各部と請求項の構成要素との対応
上記実施の形態では、通信モジュール31が通信手段に相当し、CPU32が処理装置に相当し、コネクタCN1が接続部に相当し、充電モジュール23が充電手段に相当し、制御モジュール11、発話モジュール14、スピーカ15、モータ161〜165および外皮100が動作部に相当する。また、制御モジュール11、モータ161〜165および外皮100が身体動作部に相当し、制御モジュール11、発話モジュール14およびスピーカ15が発話動作部に相当する。外皮100の動きが身体動作に相当し、スピーカ15からの発話が発話動作に相当する。
【0090】
また、メモリ12が記憶手段に相当し、対応テーブルが対応関係に相当し、制御モジュール11が制御手段に相当する。充電容量センサ22が充電状態検出手段に相当し、脱着センサ21が脱着状態検出手段に相当する。バッテリ25の充電容量が所定レベルよりも低下したことまたはバッテリ25が満充電状態になったことがバッテリ35の充電状態に相当し、携帯電話30が充電器20にセットされたことおよび携帯電話30が充電器20から取り外されたことが充電器への携帯電話の脱着状態に相当し、通信モジュール31による電子メールの受信が通信手段の通信状態に相当し、設定時刻が予め設定された時刻に相当する。
【産業上の利用可能性】
【0091】
本発明は、家庭、職場等において日常生活を精神的に潤すパーソナルなロボットシステム等に利用することができる。
【図面の簡単な説明】
【0092】
【図1】本発明の一実施の形態に係るロボットシステムの構成を示す模式図である。
【図2】図1のロボットシステムのロボット、充電器および携帯電話の構成を示すブロック図である。
【図3】ロボットのメモリに記憶される対応テーブルの一例を示す模式図である。
【図4】携帯電話のCPUによるロボットの制御を示すフローチャートである。
【図5】携帯電話のCPUによるロボットの制御を示すフローチャートである。
【符号の説明】
【0093】
10 ロボット
11 制御モジュール
12 メモリ
13 通信モジュール
14 発話モジュール
15 スピーカ
17 電源モジュール
18 ACアダプタ
19 電源プラグ
20 充電器
21 脱着センサ
22 充電容量センサ
23 充電モジュール
30 携帯電話
31 通信モジュール
32 CPU(中央演算処理装置)
33 メモリ
34 時計モジュール
35 バッテリ
100 外皮
110 胴部
120 右の突部
130 左の突部
140 頭部
150 制御用基板
161〜165 複数のモータ
C1 6V用の電源ケーブル
C2 100V用の電源ケーブル
CL 制御ライン
PL 電源ライン
CN1,CN2 コネクタ
【特許請求の範囲】
【請求項1】
充電器と、
前記充電器に着脱自在な携帯電話と、
前記充電器と電気的に接続されたロボットとを備え、
前記携帯電話は、
通信動作を行う通信手段と、
前記通信手段を制御するとともに、当該携帯電話の状態に対応する信号を前記ロボットに与える処理装置と、
前記通信手段および前記処理装置に電力を供給するバッテリとを含み、
前記充電器は、
前記携帯電話の前記処理装置および前記バッテリに接続可能な接続部と、
電源から電力を受け、前記接続部を介して前記バッテリを充電する充電手段とを含み、
前記ロボットは、
前記電源から電力を受け、かつ前記携帯電話の前記処理装置と有線または無線通信により接続され、前記処理装置から与えられる信号に基づく動作を行う動作部を含むことを特徴とするロボットシステム。
【請求項2】
前記ロボットの前記動作部は、
前記処理装置から与えられる信号に基づいて身体動作を行う身体動作部を含むことを特徴とする請求項1記載のロボットシステム。
【請求項3】
前記ロボットの前記動作部は、
前記処理装置から与えられる信号に基づいて発話動作を行う発話動作部を含むことを特徴とする請求項1または2記載のロボットシステム。
【請求項4】
前記ロボットは、
前記携帯電話の状態と前記動作部の動作との対応関係を記憶する記憶手段と、
前記処理装置から与えられる信号および前記記憶手段に記憶される対応関係に基づいて前記動作部の動作を制御する制御手段とをさらに含むことを特徴とする請求項1〜3のいずれかに記載のロボットシステム。
【請求項5】
前記携帯電話の前記処理装置は、
前記通信手段により受信された情報に基づいて前記記憶手段に記憶される対応関係を更新することを特徴とする請求項4記載のロボットシステム。
【請求項6】
前記充電器は、前記携帯電話の前記バッテリの充電状態を検出する充電状態検出手段をさらに含み、
前記携帯電話の前記処理装置は、前記充電状態検出手段により検出された充電状態を示す信号を当該携帯電話の状態に対応する信号として前記ロボットに与えることを特徴とする請求項1〜5のいずれかに記載のロボットシステム。
【請求項7】
前記充電器は、当該充電器への前記携帯電話の脱着状態を検出する脱着状態検出手段をさらに含み、
前記携帯電話の前記処理装置は、前記充電状態検出手段により検出された脱着状態を示す信号を当該携帯電話の状態に対応する信号として前記ロボットに与えることを特徴とする請求項1〜6のいずれかに記載のロボットシステム。
【請求項8】
前記携帯電話の前記処理装置は、前記通信手段の通信状態を示す信号を当該携帯電話の状態に対応する信号として前記ロボットに与えることを特徴とする請求項1〜7のいずれかに記載のロボットシステム。
【請求項9】
前記携帯電話の前記処理装置は、予め設定された時刻に関する信号を当該携帯電話の状態に対応する信号として前記ロボットに与えることを特徴とする請求項1〜8のいずれかに記載のロボットシステム。
【請求項10】
前記充電器と前記ロボットとは別体として構成されたことを特徴とする請求項1〜9のいずれかに記載のロボットシステム。
【請求項11】
前記充電器と前記ロボットとは一体的に構成されたことを特徴とする請求項1〜9のいずれかに記載のロボットシステム。
【請求項1】
充電器と、
前記充電器に着脱自在な携帯電話と、
前記充電器と電気的に接続されたロボットとを備え、
前記携帯電話は、
通信動作を行う通信手段と、
前記通信手段を制御するとともに、当該携帯電話の状態に対応する信号を前記ロボットに与える処理装置と、
前記通信手段および前記処理装置に電力を供給するバッテリとを含み、
前記充電器は、
前記携帯電話の前記処理装置および前記バッテリに接続可能な接続部と、
電源から電力を受け、前記接続部を介して前記バッテリを充電する充電手段とを含み、
前記ロボットは、
前記電源から電力を受け、かつ前記携帯電話の前記処理装置と有線または無線通信により接続され、前記処理装置から与えられる信号に基づく動作を行う動作部を含むことを特徴とするロボットシステム。
【請求項2】
前記ロボットの前記動作部は、
前記処理装置から与えられる信号に基づいて身体動作を行う身体動作部を含むことを特徴とする請求項1記載のロボットシステム。
【請求項3】
前記ロボットの前記動作部は、
前記処理装置から与えられる信号に基づいて発話動作を行う発話動作部を含むことを特徴とする請求項1または2記載のロボットシステム。
【請求項4】
前記ロボットは、
前記携帯電話の状態と前記動作部の動作との対応関係を記憶する記憶手段と、
前記処理装置から与えられる信号および前記記憶手段に記憶される対応関係に基づいて前記動作部の動作を制御する制御手段とをさらに含むことを特徴とする請求項1〜3のいずれかに記載のロボットシステム。
【請求項5】
前記携帯電話の前記処理装置は、
前記通信手段により受信された情報に基づいて前記記憶手段に記憶される対応関係を更新することを特徴とする請求項4記載のロボットシステム。
【請求項6】
前記充電器は、前記携帯電話の前記バッテリの充電状態を検出する充電状態検出手段をさらに含み、
前記携帯電話の前記処理装置は、前記充電状態検出手段により検出された充電状態を示す信号を当該携帯電話の状態に対応する信号として前記ロボットに与えることを特徴とする請求項1〜5のいずれかに記載のロボットシステム。
【請求項7】
前記充電器は、当該充電器への前記携帯電話の脱着状態を検出する脱着状態検出手段をさらに含み、
前記携帯電話の前記処理装置は、前記充電状態検出手段により検出された脱着状態を示す信号を当該携帯電話の状態に対応する信号として前記ロボットに与えることを特徴とする請求項1〜6のいずれかに記載のロボットシステム。
【請求項8】
前記携帯電話の前記処理装置は、前記通信手段の通信状態を示す信号を当該携帯電話の状態に対応する信号として前記ロボットに与えることを特徴とする請求項1〜7のいずれかに記載のロボットシステム。
【請求項9】
前記携帯電話の前記処理装置は、予め設定された時刻に関する信号を当該携帯電話の状態に対応する信号として前記ロボットに与えることを特徴とする請求項1〜8のいずれかに記載のロボットシステム。
【請求項10】
前記充電器と前記ロボットとは別体として構成されたことを特徴とする請求項1〜9のいずれかに記載のロボットシステム。
【請求項11】
前記充電器と前記ロボットとは一体的に構成されたことを特徴とする請求項1〜9のいずれかに記載のロボットシステム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2007−110335(P2007−110335A)
【公開日】平成19年4月26日(2007.4.26)
【国際特許分類】
【出願番号】特願2005−297921(P2005−297921)
【出願日】平成17年10月12日(2005.10.12)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成17年度独立行政法人情報通信研究機構、研究テーマ「人間情報コミュニケーションの研究開発」に関する委託研究、産業活力再生特別措置法第30条の適用を受ける特許出願
【出願人】(393031586)株式会社国際電気通信基礎技術研究所 (905)
【Fターム(参考)】
【公開日】平成19年4月26日(2007.4.26)
【国際特許分類】
【出願日】平成17年10月12日(2005.10.12)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成17年度独立行政法人情報通信研究機構、研究テーマ「人間情報コミュニケーションの研究開発」に関する委託研究、産業活力再生特別措置法第30条の適用を受ける特許出願
【出願人】(393031586)株式会社国際電気通信基礎技術研究所 (905)
【Fターム(参考)】
[ Back to top ]