
ロボットシステム
【課題】 軽量簡便なシステムで、静止状態または動作中にかかわらず安定な姿勢が保たれるロボットシステムを提供する。
【解決手段】 複数の体節3と、前記体節同士をつなぐ関節4と、前記関節を駆動する駆動装置5と、前記駆動装置を制御する制御装置8と、前記体節、関節、駆動装置または制御装置のうち少なくとも一つに設けられ、外界より比重の軽い流体が注入された浮嚢2を有し、浮心と重心が異なり、外界に対する比重が1以上であることを特徴とするロボットシステム。
【解決手段】 複数の体節3と、前記体節同士をつなぐ関節4と、前記関節を駆動する駆動装置5と、前記駆動装置を制御する制御装置8と、前記体節、関節、駆動装置または制御装置のうち少なくとも一つに設けられ、外界より比重の軽い流体が注入された浮嚢2を有し、浮心と重心が異なり、外界に対する比重が1以上であることを特徴とするロボットシステム。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、各種の機動可能なロボットシステムに関わり、特に活動空間が人間と交錯する各種ロボットシステムに関する。
【背景技術】
【0002】
従来のロボットシステムは、金属や樹脂などにより形成された骨格をなす機構系を、各種動力を用いたモータやアクチュエータ、エンジン等で駆動させている。そして、必要な姿勢の維持は、(1)各種の内界及び外界センサを用いて得た情報をロボットシステム本体に搭載され又は外部におかれ、ロボットシステム本体と情報のやりとりを可能とする制御装置を用いて処理し、各駆動部に必要な指令を発し相応の重量を移動させるバランス制御装置、あるいは(2)上部の重心移動を封殺するに十分な重量相当のバラストを底部に搭載し、重力による復原力の利用によって行われている。このためシステムは複雑な情報処理を必要とし、また、重量も大きく、堅く、活動空間を人間と交錯させることは、人間にとって大きな危険が伴うものであった。
【0003】
これを解決するにはシステムを華奢にする必要があったが、構造体の形態維持の観点から困難である。また、歩行ロボットなどをはじめとして、システムの姿勢の維持、安定な自立、機動等には多くのセンサ系、駆動系を統合し、適正にコントロールする必要があり、情報処理系の負担は大きく、情報処理装置の大型化やエネルギーの大量消費を招き、システム全体として重量面での制約にも繋がっており、特に自立システムにおいてその影響は著しい物がある。また、復原力を重力による復原モーメントに依存している場合は、バラストの搭載等がなされ、全体重量の増加に拍車をかけるものである。
【特許文献1】特開平9−131689号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
本発明の目的は、複雑な姿勢制御システムあるいは重いバラストを必要とせず、静止状態または動作中にかかわらず安定な姿勢に保たれるロボットシステムを提供することである。
【課題を解決するための手段】
【0005】
本願第1の発明は、複数の体節と、前記体節同士をつなぐ関節と、前記関節を駆動する駆動装置と、前記駆動装置を制御する制御装置と、前記体節、関節、駆動装置または制御装置のうち少なくとも一つに設けられ、外界より比重の軽い流体が注入された浮嚢を有し、浮心と重心が異なり、外界に対する比重が1以上であることを特徴とするロボットシステムである。
【0006】
上記の本発明においては、外界より比重の軽い流体を充填した浮嚢等により得られた浮力でロボットシステムは懸垂され、システムの機動や外乱その他に伴うシステムの姿勢の変化に対しては任意の床面との設置点あるいはシステムの重心等を中立点とした振動系が形成され、浮力により発生する復原力により系全体が安定な姿勢に保たれる。
【0007】
また、同時に充填した流体により浮嚢の外皮が緊張し張力が与えられることで、必要に応じた強度・剛性・柔軟性を各体節に与え、構造体の形態維持や自立の他、歩行や跳躍などの各種機動が可能となるほか、体節自身の柔軟性により衝撃力の吸収等も可能となる。
【0008】
本発明によれば、重力に依存しない復原力を用いて安定な系を軽量簡便なロボットシステムで形成することにより、情報処理系の負担を大幅に減ずるとともに、骨格系が果たしている諸機能の内、もっとも基本的な支持機構としての役割をも大きく低減し、骨格系の占める重量を大きく減じることで本体重量を低減する一方で、自立や機動に充分な構造強度を持ち、かつ、人間と同じ環境下での使用に適した、すなわち、倒れても人間に危害を与えない、ロボットシステムを提供することができる。
【発明の効果】
【0009】
以上説明したように、本発明によれば、複雑な姿勢制御システムあるいは重いバラストを必要とせず、外界より比重の軽い流体を充填した浮嚢等により得られた浮力によって発生する復原力により、ロボットシステムは静止状態または動作中にかかわらず安定な姿勢に保たれる。
【発明を実施するための最良の形態】
【0010】
以下に図面を参照しながら、本発明の実施形態を詳細に説明する。
【0011】
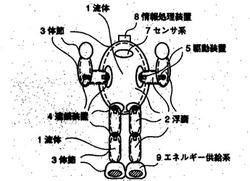
図1は本発明の第1の実施形態に係るロボットシステムのロボット本体の機構連鎖系及び内部構造の概要を示す概念図である。本ロボットシステムは、外界に比して比重の小さい流体1(例えば、外界が大気の場合の流体1はHeガスである)を充填する種々の形状・大きさを持つ浮嚢2をもち、浮嚢2自身あるいは浮嚢2を内包する体節3を、相互に連鎖・可動させうる連鎖装置(関節)4を用いて任意の組合せ方で必要な個数連鎖させ、所定の外形・連鎖系を有する自立可能なロボットシステムを形成し、駆動装置5をもちいて体節3相互を相対運動させることにより歩行や姿勢変化など、システムを機動させるものである。駆動装置5は公知の制御装置(不図示)によって制御され、ロボットシステムを起動させている。尚、一部の体節には、浮嚢は入ってなくてもよく、一部の浮嚢は体節に覆われていなくてもよい。
【0012】
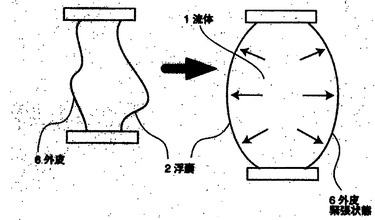
図2に図1の浮嚢2の構造概念図を示す。浮嚢2は少なくとも一重以上の外皮6をもち、その内部に流体1を充填させることが出来る。従って、浮嚢2に外界より比重の軽い流体1を充填させることにより浮力を得ることができる。また、外皮6が柔軟な素材により形成された場合は、弁機構やシリンダピストン機構、流体1の貯蔵・発生装置(例えば、ボンベ)を用いて、浮嚢2内部の充填流体1の外界への排出や再充填、圧縮、他の浮嚢への移動等を行うことで、充填流体1の圧力を適宜設定あるいは加減することによって、外皮6を緊張・弛緩させることで発生させる張力を望む値に設定・変更することができ、これにより浮嚢2あるいは体節3に与える強度・剛性・衝撃吸収力などを望む値に設定あるいは可変することが出来る。これにより必要な強度・剛性等が与えられた浮嚢2あるいは体節3はロボットシステムの機構系を形成する骨格要素として用いることも可能となる。
【0013】
また、同様に弁機構やシリンダピストン機構、流体1の貯蔵発生装置等を用いて、浮嚢2内部に充填された流体1の外界への排出や再充填、圧縮、他の浮嚢への移動等を行うことで、充填された流体1の体積を加減することにより、浮嚢2あるいは体節3自体の形態・大きさ等を適宜変化させることもでき、発生する浮力も適宜変化させることが出来、本ロボットシステム全体としても必要に応じての剛性の変更、形態の変更、姿勢の変更等を果たすことができる。これにより狭隘部の通過を果たすことができるなど機動性の面で優れ、或いは特定箇所に躰を固定する、或いは不定形の物体を把持する、輸送時のシステム容積を小さくする等の行為が行える。
【0014】
充填流体源は内部に搭載しても良いし、外部から常時または随時供給しても良い。また、この制御は圧力弁等を用いても良いし、機構あるいはゴム等の材質を利用した逆止弁出でも良い。
【0015】
尚、浮嚢2内には、浮嚢の構造強度を高めるために、構造部材(例えば、樹脂製の骨格、桁)が入っていてもかまわない。
【0016】
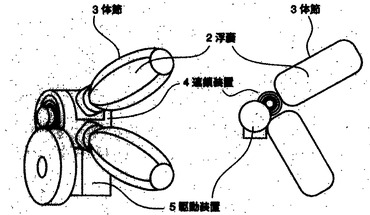
図3は、浮嚢2を内包する体節3を連鎖させて形成する第1の実施形態の機構構造概念図を示す。本発明の浮嚢2あるいは体節3同士を、相互に連鎖・可動させうる連鎖装置4例えば、継ぎ手、弾性ヒンジ等を用いて結節し、駆動装置5例えばバネ、モータ・減速機系や流体圧アクチュエータなどをもちいて浮嚢2あるいは体節3相互を相対運動可能とすることにより能動あるいは受動により駆動しうる機構系を形成する。連鎖装置4と駆動装置5は例えばモータ・減速機系に直接浮嚢2あるいは体節3を取り付けるなどして一体化しても良い。流体圧アクチュエータを使用する際はその流体自身が浮嚢内に充填されて浮力を得る目的で使用される物と同一であっても良い。また、体節3と直接に弁機構やシリンダピストン機構、流体1の貯蔵・発生装置等を用いて浮嚢2内部の充填流体1の外界への排出や再充填、圧縮、他の浮嚢への移動等を行うことで、充填流体1の圧力を適宜設定あるいは加減することによって、姿勢・形態の変化を果たし、これに伴って駆動させるようにしても良い。
【0017】
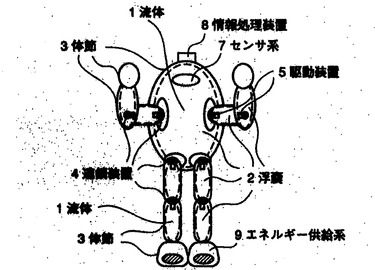
図4は、本発明の第2の実施形態に係るロボットシステムの概念図を示す。本ロボットシステムは、浮嚢2と、浮嚢2自身あるいは浮嚢2を内包することにより形成される体節3と、浮嚢2乃至体節3を任意の組合せ方で必要な個数連鎖させ、所定の外形・連鎖系を形成し、相互に連鎖・可動させうる連鎖装置4と、浮嚢2あるいは体節3を相互に相対運動させる駆動装置5と、内外界の各種情報を収集するセンサ系7と、情報処理装置8と、エネルギー供給系9等により形成されている。
【0018】
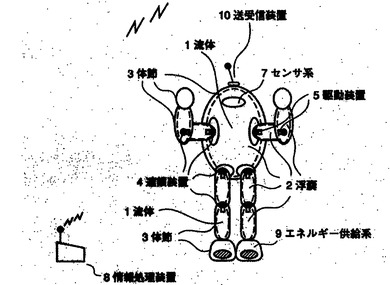
駆動装置5をもちいて体節3相互を相対運動させることにより歩行や姿勢変化など目的に応じた機動を果たすシステムを為している。この場合、図5に示すように、ロボット本体に送受信装置10を搭載し、センサ系7、情報処理装置8あるいはエネルギー供給系9等の一部あるいは全部を外部に設置し、送受信装置10により情報をやりとりすることで遠隔でコントロールしても良く、この場合、システムの軽量化、省エネルギー化または活動時間の延長などの効果がある。
【0019】
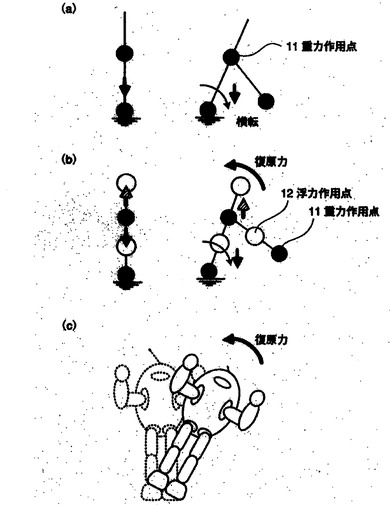
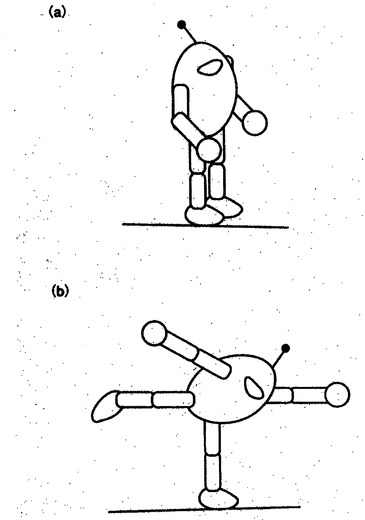
図6は第2の実施形態に係るロボットシステム自立及び姿勢安定の一例を示す概念模式図である。図の黒丸は重力作用点11を、白丸は浮力作用点12を表す。
【0020】
図6(a)に示すように、従来のロボットシステムは基本的に倒立振子を為しており、その自立維持にはセンサ系、情報処理・制御系、アクチュエータ系等を組み合わせて系の重心位置を変化・調節し、これによって自重による復原モーメントを発生させることに依っており、情報の収集・処理量、エネルギー消費量等に大きな負荷が求められていた。充分な重さを有する固定バラストを積んだシステムにおいては自重を利用した復原力が自動的に作用するが、多様な環境や外乱などへの耐性を高めるためには、自ずと大重量のバラストの搭載が必要となり、全体重量増加、床面への負荷、近接する可能性がある人間その他に対する安全性等の観点から望ましい方式ではなかった。
【0021】
図6(b)に示すように、本ロボットシステムでは浮嚢2に充填した外界に比べて比重の小さい流体1により得た浮力を用いており、システムの浮心に作用する浮力と、システムの重心に作用する重力との間に発生する偶力をもって復原モーメントを発生させて復原力を得ることにより系としての安定を果たしているため、多様な姿勢変化に対しても、システムは安定な姿勢に復帰することが出来る(図6(C))。この復帰は前述の通り、浮力による復原力に果たされるため、センサ系、情報処理・制御系、アクチュエータ系等に何ら負担を与えずに行われる。この結果、センサ系、情報処理・制御系、アクチュエータ系等を問わず負荷を低減することができ、結果として機動性、操縦性、エネルギー消費等の向上につながる。尚、重心とは、ロボットシステム全体の重力の作用点をいい、浮心とは、ロボットシステム全体の浮力の作用点である浮力の中心をいう。そして、地面とこのシステムが接する接地点からこのシステムの重心までの距離と重力との積が、この接地点からこのシステムの浮心までの距離と浮力との積よりも小さければ、浮力による復原力によって、安定した姿勢の維持が可能になる。
【0022】
また、従来のシステムでは、システム停止中あるいは、不測の事態によりシステムがダウンした際などは、それ以降、自立・姿勢維持を果たすことは不可能となるが、本ロボットシステムの姿勢維持はセンサ系、情報処理・制御系、アクチュエータ系等に何ら負担を与えずに行われるため、システム停止中あるいは不測の事態によりシステムがダウンしたような場合に置いても姿勢の維持は継続されるため、横転してシステム自体や周辺を破損させる危険が無くなり、また停止・格納のために横転を防止する特別のドック等を設ける必要もなく、安全が確保されうる。
【0023】
また、本ロボットシステムは、機動中に床面、壁面あるいは構造物または人間その他の移動物体等への衝突が起こったとしても、床面との設置点または、システムの重心等を中立点として振動を行い、システム本体が衝突・衝撃に対して逃げることが可能であり、また、柔軟な外皮で形成された浮嚢あるいは体節は衝撃を吸収する性質をもつため、本システム及び床面、壁面、構造物または人間その他の移動物体双方の破砕その他を防止する事ができ、安全が確保される。
【0024】
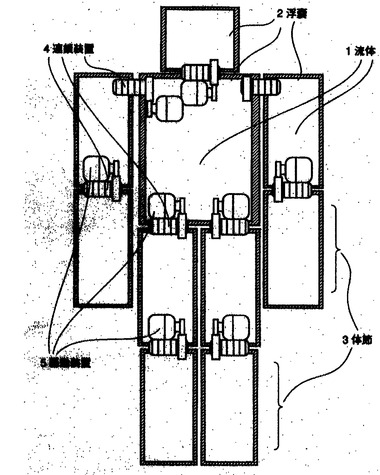
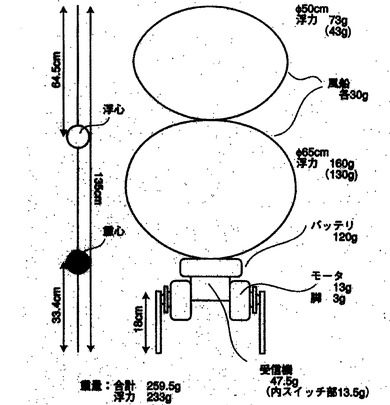
図7は、第2の実施形態に係るロボットシステムの一例の構造概略図である。図7のロボットシステム全体の重量は浮力よりも重いため、地面に接している。また、風船(浮嚢)によって得られる浮力によって、安定した自立または歩行ができる。一方、図示した風船がないと、浮力が働かず、バランスをくずして倒れてしまい、当然、歩行もできない。このように、本実施形態によれば、複雑な姿勢制御システムあるいは重いバラストを必要とせず、静止状態または動作中にかかわらず安定な姿勢が保たれる。
【0025】
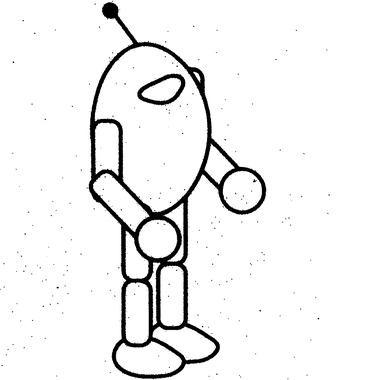
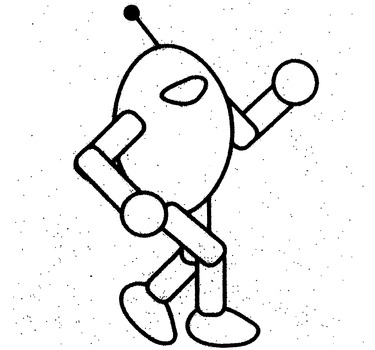
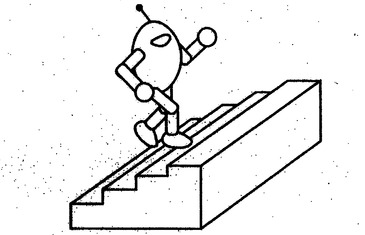
図8〜15に、前述した図4に示す第2の実施形態に係るロボットシステムの機動概念を示す。本ロボットシステムは図8に示すように人間に似た二脚自立型のロボットシステムを形成しており、図9のように人間同様二脚を用いての歩行動作を行うことができる。図10に従来のロボットシステムで同様の二脚歩行システムを形成して歩行動作を試みる場合について示す。従来のロボットシステムで同様の歩行動作を達成させる場合は、動作に伴う重心点の変動をセンサ系によって絶えず把握し情報処理装置によって処理し、適正な指示を各アクチュエータに出すなど、転倒防止・姿勢維持に大きな負担を強いられる。図11に本システムによって歩行動作を試みる場合について示す。本ロボットシステムは浮力に基づく復原力が絶えず働き転倒を抑止するため、容易に歩行動作を達成できる。また、この結果、図12に示すような階段昇降動作などをはじめとし登坂動作等、床面の各種起伏に対してそれぞれ特別な制御等を行わずとも、横転の心配なく動作することができる。
【0026】
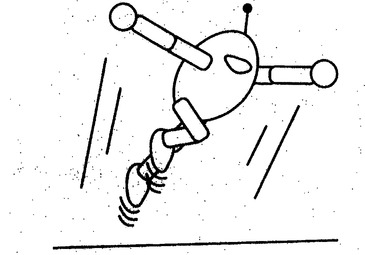
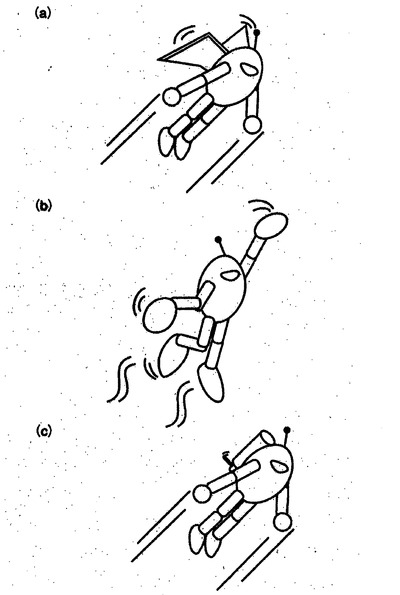
図13は本ロボットシステムの跳躍動作を示している。軽量故に容易に跳躍が可能であり、また、浮嚢や体節構造自身が衝撃を吸収する性質有しているため着地においてもシステム上破損等の危険が小さく、また、機構制御的に特別な着地動作を行ったり慣性衝撃等を減じてやる必要等も必ずしも無い。また、図14に示すようにはばたき(a)やヒレ(b)、種々の推進装置(c)を取り付けることやシステムの浮力を調整する事で飛行、游泳を行ったり、図15のような浮上移動(a)、浮游(b)などが可能となる。
【0027】
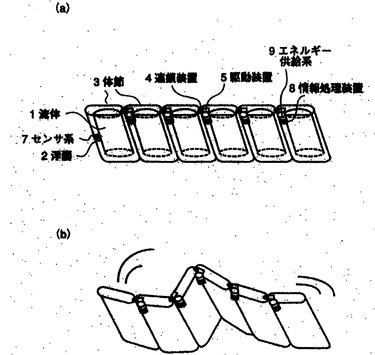
図16は、本発明の第3の実施形態に係るロボットシステムの概念図を示す。本ロボットシステムは、浮嚢2と、浮嚢2自身あるいは浮嚢2を内包することにより形成される体節3と、浮嚢2あるいは体節3を簾状に必要な個数連鎖させ、所定の外形・連鎖系を形成し、相互に連鎖・可動させうる連鎖装置4と、浮嚢2乃至体節3を相互に相対運動させる駆動装置5と、内外界の各種情報を収集するセンサ系7と、情報処理装置8と、エネルギー供給系9等により形成されている。本実施形態は駆動装置5をもちいて体節3相互を順次相対運動させることにより、システム全体で進行波を形成し機動を果たすシステムを為している。
【0028】
図17及び18は、前述した図4に示す第2の実施形態に係るロボットシステ
ムの機動概念図である。
【0029】
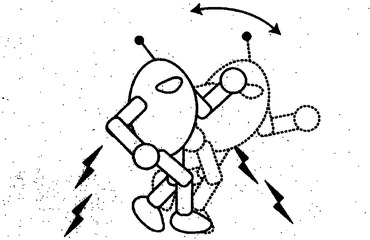
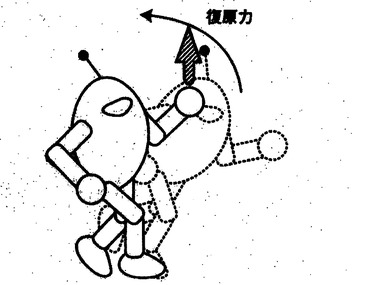
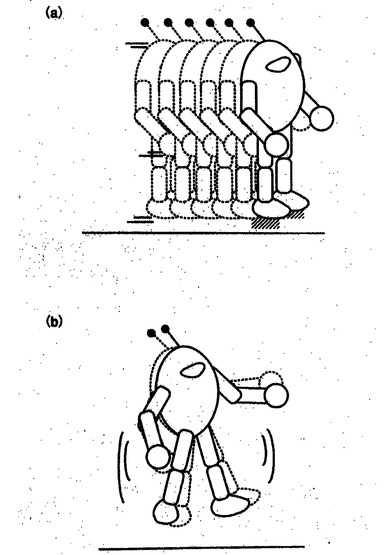
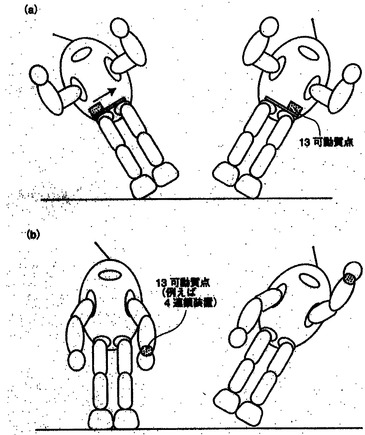
図17及び18に示すようにシステムの重心を移動させる、或いは重心の相互位置を変える、必要に応じて弁機構やシリンダピストン機構、流体1の貯蔵・発生装置等を用いて浮嚢に充填した流体1の加減圧乃至他の浮嚢への移動或いは外界への排出・再充填等を行うことにより各浮嚢の浮力を調整するなどを単独乃至組み合わせて用いることで浮嚢・体節個々あるいはシステム全体の重心、浮心の位置、システムの重量、浮力を変更してやることにより、システムを機動・停止させる際の復原力による中立姿勢を図17の(a)から(b)のように自由に変じてやることが出来る。このとき、本システムはその新たな中立姿勢を継続して維持するためのエネルギーというものを必要としない特徴がある。重心位置を変じるための可動質量13は、図18(a)に示すように専用の集中質量を搭載しても良いし、(b)に示すように連鎖装置、駆動装置、エネルギー供給系等の各種システム搭載装置に兼ねさせても良い。また、その可動質量13の移動には専用の駆動装置を設けても良いし、システムの連鎖装置の能動的あるいは受動的動作を利用しても良い。
【0030】
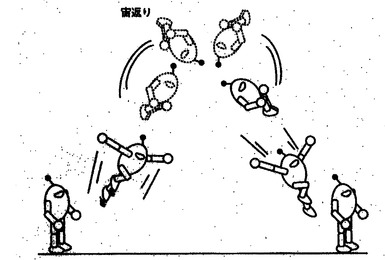
また、これによる方向や姿勢転換、ひねり動作等が可能であり、跳躍動作等の各種動作と組み合わせることで容易に宙返り、きりもみ等アクロバット動作が可能となる。アクロバット動作の一例を図19に示す。
【0031】
以上のように本実施形態のロボットシステムは、従来のシステムに比べて軽量で姿勢維持が容易であるため、多様且つ卓越した機動性を発揮し得る。
【0032】
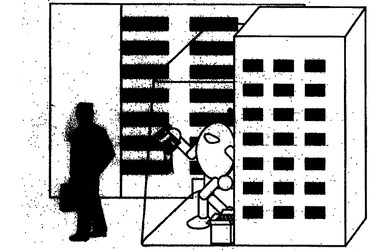
図20は前述した図4に示す第2の実施形態に係るロボットシステムが店頭やショーウィンドウなどで可動ディスプレーロボットとして活動するシステムを示している。本システムを使うことで、マネキン等に比して観察者に多様な視点を提供することが可能であるとともに、その動きによる誘因効果や指示・誘導・案内用等といった機能も併せ持たせることもできる。
【0033】
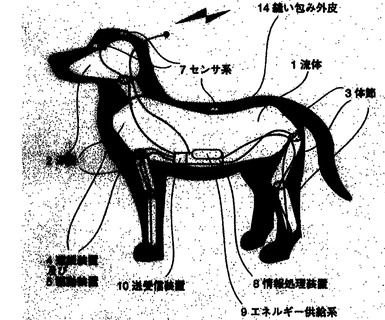
図21は本発明の第4の実施形態に係るロボットシステムとして、家庭内ペット用ロボットを示している。
【0034】
本システムは、浮嚢2と、浮嚢2自身あるいは浮嚢2を内包することにより形成される体節3と、浮嚢2あるいは体節3を任意の組合せ方で必要な個数連鎖させ、所定の外形・連鎖系を形成し、相互に連鎖・可動させうる連鎖装置4と、浮嚢2あるいは体節3を相互に相対運動させる駆動装置5と、内外界の各種情報を収集するセンサ系7と、情報処理装置8と、エネルギー供給系9と任意の外形を与えるための縫い包み外皮14等により形成されている。駆動装置5をもちいて体節3相互を相対運動させることにより歩行や姿勢変化など目的に応じた機動を果たすシステムを為している。また、縫い包み外皮14は浮嚢2あるいは体節3の外皮と共通あるいは同一であってもよいし、浮嚢2あるいは体節3の外皮そのものであっても良い。
【0035】
本ロボットシステムは姿勢維持が容易であって、外観や連鎖・機構系その他への制約が従来のロボットシステムに比して著しく小さいため、縫い包み外皮14を適宜選択してやることにより、漫画やテレビのキャラクターや商品そのもの、生物・幻獣等を模したもの、あるいは無生物に至るまでの多様且つ魅力に富んだ外形を有する機動可能なロボットシステムの形成を容易に達成できる。形成したロボットシステムは、軽量で建物床面その他に多大な負荷や損傷を与える恐れが無く、他方、各種の起伏や段差等に対応して機動することが可能なことから、通常の建て屋、住居その他の内部で稼動させることができ、また、構造が柔軟なため人間、その他の周辺器物や壁面等と接触しても、システム、人間、器物等の何れも破損の危険が小さく、安全が確保しうる。
【0036】
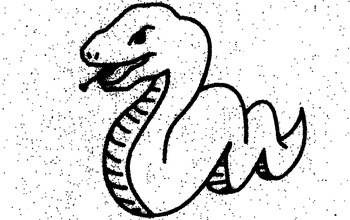
例えば1脚で自立するといった従来のロボットシステムでは不安定な形態を有する物であっても安定に姿勢の維持が可能な一脚自立ロボットシステム形成することが出来、その形態をいかした跳躍等魅力的な動きを与えることもできる。あるいは図22に示す蛇型ロボットのように大蛇や龍の如く躰をくねらせて移動する、あるいは布状ロボットのように平たい形態を有するものが、波打たせて進行する等と行った特異な機動も容易に実現でき、ロボットシステムに魅力を与えることが出来る。
【0037】
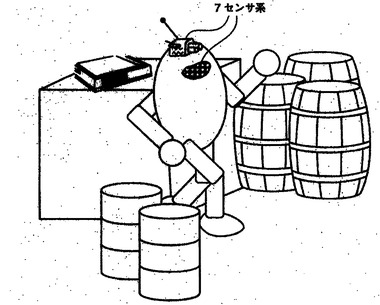
図23は前述した図4に示す第2の実施形態に係るロボットシステムの変形例の一つとして巡視ロボットを示している。本システムは前述した図4に示す第2の実施形態に係るロボットシステムに巡視作業に必要となるセンサ類等を搭載して形成されている。センサ系7により不審な侵入者や異常事態を発見・通報・監視・追跡する、外出先から自宅内の様子を移動巡視・モニタ・記録する等、警備・監視・巡視ロボットとして活動させることが出来る。
【0038】
本ロボットシステムは移動が可能であるため雲台上に固定された監視カメラ等の監視装置に比して多様且つ柔軟な視点を提供しうる。また、人間と異なり不測の事態発生に際しても危険を省みず現場に急行する、対象物の移動等に応じて追跡する等の使用も可能である。加えて、本システムを自立した系として形成した場合は、建物などの被巡視対象物から独立した系を為していることから、火災その他の要因で被巡視対象のインフラ機能が麻痺した際も、本システムを用いての情報の入手が可能となる。
【0039】
また、本ロボットシステムは、公共施設・病院などの待合室での遊び相手・案内ロボットとしても活用できる。本ロボットシステムは、通常の従業員・看護婦等が行う誘導・案内・情報提供等の業務を代行することが出来るほか、その動きや愛玩に適した形態を縫う包み外皮8により与えることで、来診者、入院者等の精神状態を明るくする効果も期待できる。また、撮像センサその他を搭載することで、病室内その他で患者等を監視し、異常の発見・通報等を行うことが出来る。この場合、通常の固定撮像装置その他に比して穏やかな外観を有することで人間に不快感を与えずに必要な監視行動をとることが可能となる。
【0040】
本発明の第8の実施形態に係るロボットシステムは前述した図4に示す第2の実施形態に係るロボットシステムに遊園地などでのアトラクション用途に相応しい魅力のある縫い包み外皮14を被せて形成されている。
【0041】
本ロボットシステムはアクロバット動作が可能であるとともに、人間その他と接触しても安全性が確保しうる他、軽量で建物床面その他に多大な負荷や損傷を与える恐れが無いことから、各種のホール、体育館、常設乃至仮設ステージ、パビリオン等で稼動させることが可能である。また、来訪者の誘因効果や指示・誘導・案内用あるいは待ち時間や待合室での遊び相手、展示物の説明員等としての機能も併せ持たせることもできる。また、本ロボットシステムは人間と異なり空間の立体的な移動が容易且つ安全に行うことが出来るため、テラスからテラスへ直接跳躍や飛行により移動したり、参観者が距離を置いて眺めざるを得ない展示物の特定部位に対して飛行や浮游により接近して明確に指し示すなど人間や、音声のみの説明に比して大きな魅力を備えさせることもできる。例えば龍を模した外形を有し躰をくねらせることで床面を這ったり、進行波による遊泳飛行により移動が可能な龍型ロボットシステムである。また、人間と接触しても安全性が高いため、お化け屋敷など人間に近接してロボットが稼動する箇所での使用にも適している。
【0042】
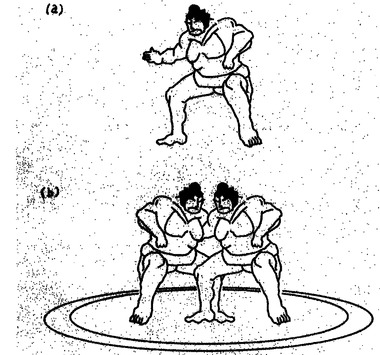
図24は本発明の第10実施形態に係る格闘ゲーム用ロボットシステムを示している。本ロボットシステムは前述した図4の本発明によるロボットシステムの実施形態例にゲーム用ロボット用途に相応しい魅力のある縫い包み外皮14を被せて形成されている。室内や常設・仮設のアミューズメント施設等で本システムは自立あるいは操縦者の指示に沿って機動し操縦者の分身として競争・格闘等を行い操縦者を楽しませることが出来る。また、ビデオゲーム等に比して、その様子を操縦者のみならず多数の観衆が多方向から同時に観賞することもできる。
【図面の簡単な説明】
【0043】
【図1】第1の実施形態に係るロボットシステムの機構連鎖系及び内部構造の概要を示す概念図。
【図2】図1の浮嚢の構造概念図。
【図3】第1の実施形態に係るロボットシステムの機構構造概念図。
【図4】第2の実施形態に係るロボットシステムの概念図。
【図5】第2の実施形態に係るロボットシステムの変形例の概念図。
【図6】第2の実施形態に係るロボットシステムの自立及び姿勢安定を示す概念模式図。
【図7】第2の実施形態に係るロボットシステムの一例の構造概略図。
【図8】第2の実施形態に係るロボットシステムの二脚自立型システム概念図。
【図9】第2の実施形態に係るロボットシステムの歩行概念図。
【図10】従来のロボットシステムの歩行概念図。
【図11】第2の実施形態に係るロボットシステムの歩行概念図。
【図12】第2の実施形態に係るロボットシステムの階段昇降概念図。
【図13】第2の実施形態に係るロボットシステムの跳躍動作概念図。
【図14】第2の実施形態に係るロボットシステムの飛行・游泳動作概念図。
【図15】第2の実施形態に係るロボットシステムの浮上移動・浮游動作概念図。
【図16】第3の実施形態に係るロボットシステムの概念図。
【図17】第2の実施形態に係るロボットシステムの重心移動による姿勢変化概念図。
【図18】第2の実施形態に係るロボットシステムの重心移動による姿勢変化概念図。
【図19】第2の実施形態に係るロボットシステムのアクロバット動作概念図。
【図20】第2の実施形態に係るロボットシステムの一例である可動ディスプレーロボットを示す概念図。
【図21】本発明の第4の実施形態に係るロボットシステムの概念図。
【図22】本発明の第6の実施形態に係るロボットシステムの概念図。
【図23】本発明の第2の実施形態に係るロボットシステムの変形例である巡視ロボットを示す概念図。
【図24】本発明の第10の実施形態に係るロボットシステムの概念図
【符号の説明】
【0044】
1 流体
2 浮嚢
3 体節
4 連鎖装置
5 駆動装置
6 外皮
7 センサ系
8 情報処理装置
9 エネルギー供給系
10 送受信装置
11 重力作用点
12 浮力作用点
13 可動質点
14 縫い包み外皮
【技術分野】
【0001】
本発明は、各種の機動可能なロボットシステムに関わり、特に活動空間が人間と交錯する各種ロボットシステムに関する。
【背景技術】
【0002】
従来のロボットシステムは、金属や樹脂などにより形成された骨格をなす機構系を、各種動力を用いたモータやアクチュエータ、エンジン等で駆動させている。そして、必要な姿勢の維持は、(1)各種の内界及び外界センサを用いて得た情報をロボットシステム本体に搭載され又は外部におかれ、ロボットシステム本体と情報のやりとりを可能とする制御装置を用いて処理し、各駆動部に必要な指令を発し相応の重量を移動させるバランス制御装置、あるいは(2)上部の重心移動を封殺するに十分な重量相当のバラストを底部に搭載し、重力による復原力の利用によって行われている。このためシステムは複雑な情報処理を必要とし、また、重量も大きく、堅く、活動空間を人間と交錯させることは、人間にとって大きな危険が伴うものであった。
【0003】
これを解決するにはシステムを華奢にする必要があったが、構造体の形態維持の観点から困難である。また、歩行ロボットなどをはじめとして、システムの姿勢の維持、安定な自立、機動等には多くのセンサ系、駆動系を統合し、適正にコントロールする必要があり、情報処理系の負担は大きく、情報処理装置の大型化やエネルギーの大量消費を招き、システム全体として重量面での制約にも繋がっており、特に自立システムにおいてその影響は著しい物がある。また、復原力を重力による復原モーメントに依存している場合は、バラストの搭載等がなされ、全体重量の増加に拍車をかけるものである。
【特許文献1】特開平9−131689号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
本発明の目的は、複雑な姿勢制御システムあるいは重いバラストを必要とせず、静止状態または動作中にかかわらず安定な姿勢に保たれるロボットシステムを提供することである。
【課題を解決するための手段】
【0005】
本願第1の発明は、複数の体節と、前記体節同士をつなぐ関節と、前記関節を駆動する駆動装置と、前記駆動装置を制御する制御装置と、前記体節、関節、駆動装置または制御装置のうち少なくとも一つに設けられ、外界より比重の軽い流体が注入された浮嚢を有し、浮心と重心が異なり、外界に対する比重が1以上であることを特徴とするロボットシステムである。
【0006】
上記の本発明においては、外界より比重の軽い流体を充填した浮嚢等により得られた浮力でロボットシステムは懸垂され、システムの機動や外乱その他に伴うシステムの姿勢の変化に対しては任意の床面との設置点あるいはシステムの重心等を中立点とした振動系が形成され、浮力により発生する復原力により系全体が安定な姿勢に保たれる。
【0007】
また、同時に充填した流体により浮嚢の外皮が緊張し張力が与えられることで、必要に応じた強度・剛性・柔軟性を各体節に与え、構造体の形態維持や自立の他、歩行や跳躍などの各種機動が可能となるほか、体節自身の柔軟性により衝撃力の吸収等も可能となる。
【0008】
本発明によれば、重力に依存しない復原力を用いて安定な系を軽量簡便なロボットシステムで形成することにより、情報処理系の負担を大幅に減ずるとともに、骨格系が果たしている諸機能の内、もっとも基本的な支持機構としての役割をも大きく低減し、骨格系の占める重量を大きく減じることで本体重量を低減する一方で、自立や機動に充分な構造強度を持ち、かつ、人間と同じ環境下での使用に適した、すなわち、倒れても人間に危害を与えない、ロボットシステムを提供することができる。
【発明の効果】
【0009】
以上説明したように、本発明によれば、複雑な姿勢制御システムあるいは重いバラストを必要とせず、外界より比重の軽い流体を充填した浮嚢等により得られた浮力によって発生する復原力により、ロボットシステムは静止状態または動作中にかかわらず安定な姿勢に保たれる。
【発明を実施するための最良の形態】
【0010】
以下に図面を参照しながら、本発明の実施形態を詳細に説明する。
【0011】
図1は本発明の第1の実施形態に係るロボットシステムのロボット本体の機構連鎖系及び内部構造の概要を示す概念図である。本ロボットシステムは、外界に比して比重の小さい流体1(例えば、外界が大気の場合の流体1はHeガスである)を充填する種々の形状・大きさを持つ浮嚢2をもち、浮嚢2自身あるいは浮嚢2を内包する体節3を、相互に連鎖・可動させうる連鎖装置(関節)4を用いて任意の組合せ方で必要な個数連鎖させ、所定の外形・連鎖系を有する自立可能なロボットシステムを形成し、駆動装置5をもちいて体節3相互を相対運動させることにより歩行や姿勢変化など、システムを機動させるものである。駆動装置5は公知の制御装置(不図示)によって制御され、ロボットシステムを起動させている。尚、一部の体節には、浮嚢は入ってなくてもよく、一部の浮嚢は体節に覆われていなくてもよい。
【0012】
図2に図1の浮嚢2の構造概念図を示す。浮嚢2は少なくとも一重以上の外皮6をもち、その内部に流体1を充填させることが出来る。従って、浮嚢2に外界より比重の軽い流体1を充填させることにより浮力を得ることができる。また、外皮6が柔軟な素材により形成された場合は、弁機構やシリンダピストン機構、流体1の貯蔵・発生装置(例えば、ボンベ)を用いて、浮嚢2内部の充填流体1の外界への排出や再充填、圧縮、他の浮嚢への移動等を行うことで、充填流体1の圧力を適宜設定あるいは加減することによって、外皮6を緊張・弛緩させることで発生させる張力を望む値に設定・変更することができ、これにより浮嚢2あるいは体節3に与える強度・剛性・衝撃吸収力などを望む値に設定あるいは可変することが出来る。これにより必要な強度・剛性等が与えられた浮嚢2あるいは体節3はロボットシステムの機構系を形成する骨格要素として用いることも可能となる。
【0013】
また、同様に弁機構やシリンダピストン機構、流体1の貯蔵発生装置等を用いて、浮嚢2内部に充填された流体1の外界への排出や再充填、圧縮、他の浮嚢への移動等を行うことで、充填された流体1の体積を加減することにより、浮嚢2あるいは体節3自体の形態・大きさ等を適宜変化させることもでき、発生する浮力も適宜変化させることが出来、本ロボットシステム全体としても必要に応じての剛性の変更、形態の変更、姿勢の変更等を果たすことができる。これにより狭隘部の通過を果たすことができるなど機動性の面で優れ、或いは特定箇所に躰を固定する、或いは不定形の物体を把持する、輸送時のシステム容積を小さくする等の行為が行える。
【0014】
充填流体源は内部に搭載しても良いし、外部から常時または随時供給しても良い。また、この制御は圧力弁等を用いても良いし、機構あるいはゴム等の材質を利用した逆止弁出でも良い。
【0015】
尚、浮嚢2内には、浮嚢の構造強度を高めるために、構造部材(例えば、樹脂製の骨格、桁)が入っていてもかまわない。
【0016】
図3は、浮嚢2を内包する体節3を連鎖させて形成する第1の実施形態の機構構造概念図を示す。本発明の浮嚢2あるいは体節3同士を、相互に連鎖・可動させうる連鎖装置4例えば、継ぎ手、弾性ヒンジ等を用いて結節し、駆動装置5例えばバネ、モータ・減速機系や流体圧アクチュエータなどをもちいて浮嚢2あるいは体節3相互を相対運動可能とすることにより能動あるいは受動により駆動しうる機構系を形成する。連鎖装置4と駆動装置5は例えばモータ・減速機系に直接浮嚢2あるいは体節3を取り付けるなどして一体化しても良い。流体圧アクチュエータを使用する際はその流体自身が浮嚢内に充填されて浮力を得る目的で使用される物と同一であっても良い。また、体節3と直接に弁機構やシリンダピストン機構、流体1の貯蔵・発生装置等を用いて浮嚢2内部の充填流体1の外界への排出や再充填、圧縮、他の浮嚢への移動等を行うことで、充填流体1の圧力を適宜設定あるいは加減することによって、姿勢・形態の変化を果たし、これに伴って駆動させるようにしても良い。
【0017】
図4は、本発明の第2の実施形態に係るロボットシステムの概念図を示す。本ロボットシステムは、浮嚢2と、浮嚢2自身あるいは浮嚢2を内包することにより形成される体節3と、浮嚢2乃至体節3を任意の組合せ方で必要な個数連鎖させ、所定の外形・連鎖系を形成し、相互に連鎖・可動させうる連鎖装置4と、浮嚢2あるいは体節3を相互に相対運動させる駆動装置5と、内外界の各種情報を収集するセンサ系7と、情報処理装置8と、エネルギー供給系9等により形成されている。
【0018】
駆動装置5をもちいて体節3相互を相対運動させることにより歩行や姿勢変化など目的に応じた機動を果たすシステムを為している。この場合、図5に示すように、ロボット本体に送受信装置10を搭載し、センサ系7、情報処理装置8あるいはエネルギー供給系9等の一部あるいは全部を外部に設置し、送受信装置10により情報をやりとりすることで遠隔でコントロールしても良く、この場合、システムの軽量化、省エネルギー化または活動時間の延長などの効果がある。
【0019】
図6は第2の実施形態に係るロボットシステム自立及び姿勢安定の一例を示す概念模式図である。図の黒丸は重力作用点11を、白丸は浮力作用点12を表す。
【0020】
図6(a)に示すように、従来のロボットシステムは基本的に倒立振子を為しており、その自立維持にはセンサ系、情報処理・制御系、アクチュエータ系等を組み合わせて系の重心位置を変化・調節し、これによって自重による復原モーメントを発生させることに依っており、情報の収集・処理量、エネルギー消費量等に大きな負荷が求められていた。充分な重さを有する固定バラストを積んだシステムにおいては自重を利用した復原力が自動的に作用するが、多様な環境や外乱などへの耐性を高めるためには、自ずと大重量のバラストの搭載が必要となり、全体重量増加、床面への負荷、近接する可能性がある人間その他に対する安全性等の観点から望ましい方式ではなかった。
【0021】
図6(b)に示すように、本ロボットシステムでは浮嚢2に充填した外界に比べて比重の小さい流体1により得た浮力を用いており、システムの浮心に作用する浮力と、システムの重心に作用する重力との間に発生する偶力をもって復原モーメントを発生させて復原力を得ることにより系としての安定を果たしているため、多様な姿勢変化に対しても、システムは安定な姿勢に復帰することが出来る(図6(C))。この復帰は前述の通り、浮力による復原力に果たされるため、センサ系、情報処理・制御系、アクチュエータ系等に何ら負担を与えずに行われる。この結果、センサ系、情報処理・制御系、アクチュエータ系等を問わず負荷を低減することができ、結果として機動性、操縦性、エネルギー消費等の向上につながる。尚、重心とは、ロボットシステム全体の重力の作用点をいい、浮心とは、ロボットシステム全体の浮力の作用点である浮力の中心をいう。そして、地面とこのシステムが接する接地点からこのシステムの重心までの距離と重力との積が、この接地点からこのシステムの浮心までの距離と浮力との積よりも小さければ、浮力による復原力によって、安定した姿勢の維持が可能になる。
【0022】
また、従来のシステムでは、システム停止中あるいは、不測の事態によりシステムがダウンした際などは、それ以降、自立・姿勢維持を果たすことは不可能となるが、本ロボットシステムの姿勢維持はセンサ系、情報処理・制御系、アクチュエータ系等に何ら負担を与えずに行われるため、システム停止中あるいは不測の事態によりシステムがダウンしたような場合に置いても姿勢の維持は継続されるため、横転してシステム自体や周辺を破損させる危険が無くなり、また停止・格納のために横転を防止する特別のドック等を設ける必要もなく、安全が確保されうる。
【0023】
また、本ロボットシステムは、機動中に床面、壁面あるいは構造物または人間その他の移動物体等への衝突が起こったとしても、床面との設置点または、システムの重心等を中立点として振動を行い、システム本体が衝突・衝撃に対して逃げることが可能であり、また、柔軟な外皮で形成された浮嚢あるいは体節は衝撃を吸収する性質をもつため、本システム及び床面、壁面、構造物または人間その他の移動物体双方の破砕その他を防止する事ができ、安全が確保される。
【0024】
図7は、第2の実施形態に係るロボットシステムの一例の構造概略図である。図7のロボットシステム全体の重量は浮力よりも重いため、地面に接している。また、風船(浮嚢)によって得られる浮力によって、安定した自立または歩行ができる。一方、図示した風船がないと、浮力が働かず、バランスをくずして倒れてしまい、当然、歩行もできない。このように、本実施形態によれば、複雑な姿勢制御システムあるいは重いバラストを必要とせず、静止状態または動作中にかかわらず安定な姿勢が保たれる。
【0025】
図8〜15に、前述した図4に示す第2の実施形態に係るロボットシステムの機動概念を示す。本ロボットシステムは図8に示すように人間に似た二脚自立型のロボットシステムを形成しており、図9のように人間同様二脚を用いての歩行動作を行うことができる。図10に従来のロボットシステムで同様の二脚歩行システムを形成して歩行動作を試みる場合について示す。従来のロボットシステムで同様の歩行動作を達成させる場合は、動作に伴う重心点の変動をセンサ系によって絶えず把握し情報処理装置によって処理し、適正な指示を各アクチュエータに出すなど、転倒防止・姿勢維持に大きな負担を強いられる。図11に本システムによって歩行動作を試みる場合について示す。本ロボットシステムは浮力に基づく復原力が絶えず働き転倒を抑止するため、容易に歩行動作を達成できる。また、この結果、図12に示すような階段昇降動作などをはじめとし登坂動作等、床面の各種起伏に対してそれぞれ特別な制御等を行わずとも、横転の心配なく動作することができる。
【0026】
図13は本ロボットシステムの跳躍動作を示している。軽量故に容易に跳躍が可能であり、また、浮嚢や体節構造自身が衝撃を吸収する性質有しているため着地においてもシステム上破損等の危険が小さく、また、機構制御的に特別な着地動作を行ったり慣性衝撃等を減じてやる必要等も必ずしも無い。また、図14に示すようにはばたき(a)やヒレ(b)、種々の推進装置(c)を取り付けることやシステムの浮力を調整する事で飛行、游泳を行ったり、図15のような浮上移動(a)、浮游(b)などが可能となる。
【0027】
図16は、本発明の第3の実施形態に係るロボットシステムの概念図を示す。本ロボットシステムは、浮嚢2と、浮嚢2自身あるいは浮嚢2を内包することにより形成される体節3と、浮嚢2あるいは体節3を簾状に必要な個数連鎖させ、所定の外形・連鎖系を形成し、相互に連鎖・可動させうる連鎖装置4と、浮嚢2乃至体節3を相互に相対運動させる駆動装置5と、内外界の各種情報を収集するセンサ系7と、情報処理装置8と、エネルギー供給系9等により形成されている。本実施形態は駆動装置5をもちいて体節3相互を順次相対運動させることにより、システム全体で進行波を形成し機動を果たすシステムを為している。
【0028】
図17及び18は、前述した図4に示す第2の実施形態に係るロボットシステ
ムの機動概念図である。
【0029】
図17及び18に示すようにシステムの重心を移動させる、或いは重心の相互位置を変える、必要に応じて弁機構やシリンダピストン機構、流体1の貯蔵・発生装置等を用いて浮嚢に充填した流体1の加減圧乃至他の浮嚢への移動或いは外界への排出・再充填等を行うことにより各浮嚢の浮力を調整するなどを単独乃至組み合わせて用いることで浮嚢・体節個々あるいはシステム全体の重心、浮心の位置、システムの重量、浮力を変更してやることにより、システムを機動・停止させる際の復原力による中立姿勢を図17の(a)から(b)のように自由に変じてやることが出来る。このとき、本システムはその新たな中立姿勢を継続して維持するためのエネルギーというものを必要としない特徴がある。重心位置を変じるための可動質量13は、図18(a)に示すように専用の集中質量を搭載しても良いし、(b)に示すように連鎖装置、駆動装置、エネルギー供給系等の各種システム搭載装置に兼ねさせても良い。また、その可動質量13の移動には専用の駆動装置を設けても良いし、システムの連鎖装置の能動的あるいは受動的動作を利用しても良い。
【0030】
また、これによる方向や姿勢転換、ひねり動作等が可能であり、跳躍動作等の各種動作と組み合わせることで容易に宙返り、きりもみ等アクロバット動作が可能となる。アクロバット動作の一例を図19に示す。
【0031】
以上のように本実施形態のロボットシステムは、従来のシステムに比べて軽量で姿勢維持が容易であるため、多様且つ卓越した機動性を発揮し得る。
【0032】
図20は前述した図4に示す第2の実施形態に係るロボットシステムが店頭やショーウィンドウなどで可動ディスプレーロボットとして活動するシステムを示している。本システムを使うことで、マネキン等に比して観察者に多様な視点を提供することが可能であるとともに、その動きによる誘因効果や指示・誘導・案内用等といった機能も併せ持たせることもできる。
【0033】
図21は本発明の第4の実施形態に係るロボットシステムとして、家庭内ペット用ロボットを示している。
【0034】
本システムは、浮嚢2と、浮嚢2自身あるいは浮嚢2を内包することにより形成される体節3と、浮嚢2あるいは体節3を任意の組合せ方で必要な個数連鎖させ、所定の外形・連鎖系を形成し、相互に連鎖・可動させうる連鎖装置4と、浮嚢2あるいは体節3を相互に相対運動させる駆動装置5と、内外界の各種情報を収集するセンサ系7と、情報処理装置8と、エネルギー供給系9と任意の外形を与えるための縫い包み外皮14等により形成されている。駆動装置5をもちいて体節3相互を相対運動させることにより歩行や姿勢変化など目的に応じた機動を果たすシステムを為している。また、縫い包み外皮14は浮嚢2あるいは体節3の外皮と共通あるいは同一であってもよいし、浮嚢2あるいは体節3の外皮そのものであっても良い。
【0035】
本ロボットシステムは姿勢維持が容易であって、外観や連鎖・機構系その他への制約が従来のロボットシステムに比して著しく小さいため、縫い包み外皮14を適宜選択してやることにより、漫画やテレビのキャラクターや商品そのもの、生物・幻獣等を模したもの、あるいは無生物に至るまでの多様且つ魅力に富んだ外形を有する機動可能なロボットシステムの形成を容易に達成できる。形成したロボットシステムは、軽量で建物床面その他に多大な負荷や損傷を与える恐れが無く、他方、各種の起伏や段差等に対応して機動することが可能なことから、通常の建て屋、住居その他の内部で稼動させることができ、また、構造が柔軟なため人間、その他の周辺器物や壁面等と接触しても、システム、人間、器物等の何れも破損の危険が小さく、安全が確保しうる。
【0036】
例えば1脚で自立するといった従来のロボットシステムでは不安定な形態を有する物であっても安定に姿勢の維持が可能な一脚自立ロボットシステム形成することが出来、その形態をいかした跳躍等魅力的な動きを与えることもできる。あるいは図22に示す蛇型ロボットのように大蛇や龍の如く躰をくねらせて移動する、あるいは布状ロボットのように平たい形態を有するものが、波打たせて進行する等と行った特異な機動も容易に実現でき、ロボットシステムに魅力を与えることが出来る。
【0037】
図23は前述した図4に示す第2の実施形態に係るロボットシステムの変形例の一つとして巡視ロボットを示している。本システムは前述した図4に示す第2の実施形態に係るロボットシステムに巡視作業に必要となるセンサ類等を搭載して形成されている。センサ系7により不審な侵入者や異常事態を発見・通報・監視・追跡する、外出先から自宅内の様子を移動巡視・モニタ・記録する等、警備・監視・巡視ロボットとして活動させることが出来る。
【0038】
本ロボットシステムは移動が可能であるため雲台上に固定された監視カメラ等の監視装置に比して多様且つ柔軟な視点を提供しうる。また、人間と異なり不測の事態発生に際しても危険を省みず現場に急行する、対象物の移動等に応じて追跡する等の使用も可能である。加えて、本システムを自立した系として形成した場合は、建物などの被巡視対象物から独立した系を為していることから、火災その他の要因で被巡視対象のインフラ機能が麻痺した際も、本システムを用いての情報の入手が可能となる。
【0039】
また、本ロボットシステムは、公共施設・病院などの待合室での遊び相手・案内ロボットとしても活用できる。本ロボットシステムは、通常の従業員・看護婦等が行う誘導・案内・情報提供等の業務を代行することが出来るほか、その動きや愛玩に適した形態を縫う包み外皮8により与えることで、来診者、入院者等の精神状態を明るくする効果も期待できる。また、撮像センサその他を搭載することで、病室内その他で患者等を監視し、異常の発見・通報等を行うことが出来る。この場合、通常の固定撮像装置その他に比して穏やかな外観を有することで人間に不快感を与えずに必要な監視行動をとることが可能となる。
【0040】
本発明の第8の実施形態に係るロボットシステムは前述した図4に示す第2の実施形態に係るロボットシステムに遊園地などでのアトラクション用途に相応しい魅力のある縫い包み外皮14を被せて形成されている。
【0041】
本ロボットシステムはアクロバット動作が可能であるとともに、人間その他と接触しても安全性が確保しうる他、軽量で建物床面その他に多大な負荷や損傷を与える恐れが無いことから、各種のホール、体育館、常設乃至仮設ステージ、パビリオン等で稼動させることが可能である。また、来訪者の誘因効果や指示・誘導・案内用あるいは待ち時間や待合室での遊び相手、展示物の説明員等としての機能も併せ持たせることもできる。また、本ロボットシステムは人間と異なり空間の立体的な移動が容易且つ安全に行うことが出来るため、テラスからテラスへ直接跳躍や飛行により移動したり、参観者が距離を置いて眺めざるを得ない展示物の特定部位に対して飛行や浮游により接近して明確に指し示すなど人間や、音声のみの説明に比して大きな魅力を備えさせることもできる。例えば龍を模した外形を有し躰をくねらせることで床面を這ったり、進行波による遊泳飛行により移動が可能な龍型ロボットシステムである。また、人間と接触しても安全性が高いため、お化け屋敷など人間に近接してロボットが稼動する箇所での使用にも適している。
【0042】
図24は本発明の第10実施形態に係る格闘ゲーム用ロボットシステムを示している。本ロボットシステムは前述した図4の本発明によるロボットシステムの実施形態例にゲーム用ロボット用途に相応しい魅力のある縫い包み外皮14を被せて形成されている。室内や常設・仮設のアミューズメント施設等で本システムは自立あるいは操縦者の指示に沿って機動し操縦者の分身として競争・格闘等を行い操縦者を楽しませることが出来る。また、ビデオゲーム等に比して、その様子を操縦者のみならず多数の観衆が多方向から同時に観賞することもできる。
【図面の簡単な説明】
【0043】
【図1】第1の実施形態に係るロボットシステムの機構連鎖系及び内部構造の概要を示す概念図。
【図2】図1の浮嚢の構造概念図。
【図3】第1の実施形態に係るロボットシステムの機構構造概念図。
【図4】第2の実施形態に係るロボットシステムの概念図。
【図5】第2の実施形態に係るロボットシステムの変形例の概念図。
【図6】第2の実施形態に係るロボットシステムの自立及び姿勢安定を示す概念模式図。
【図7】第2の実施形態に係るロボットシステムの一例の構造概略図。
【図8】第2の実施形態に係るロボットシステムの二脚自立型システム概念図。
【図9】第2の実施形態に係るロボットシステムの歩行概念図。
【図10】従来のロボットシステムの歩行概念図。
【図11】第2の実施形態に係るロボットシステムの歩行概念図。
【図12】第2の実施形態に係るロボットシステムの階段昇降概念図。
【図13】第2の実施形態に係るロボットシステムの跳躍動作概念図。
【図14】第2の実施形態に係るロボットシステムの飛行・游泳動作概念図。
【図15】第2の実施形態に係るロボットシステムの浮上移動・浮游動作概念図。
【図16】第3の実施形態に係るロボットシステムの概念図。
【図17】第2の実施形態に係るロボットシステムの重心移動による姿勢変化概念図。
【図18】第2の実施形態に係るロボットシステムの重心移動による姿勢変化概念図。
【図19】第2の実施形態に係るロボットシステムのアクロバット動作概念図。
【図20】第2の実施形態に係るロボットシステムの一例である可動ディスプレーロボットを示す概念図。
【図21】本発明の第4の実施形態に係るロボットシステムの概念図。
【図22】本発明の第6の実施形態に係るロボットシステムの概念図。
【図23】本発明の第2の実施形態に係るロボットシステムの変形例である巡視ロボットを示す概念図。
【図24】本発明の第10の実施形態に係るロボットシステムの概念図
【符号の説明】
【0044】
1 流体
2 浮嚢
3 体節
4 連鎖装置
5 駆動装置
6 外皮
7 センサ系
8 情報処理装置
9 エネルギー供給系
10 送受信装置
11 重力作用点
12 浮力作用点
13 可動質点
14 縫い包み外皮
【特許請求の範囲】
【請求項1】
複数の体節と、
前記体節同士をつなぐ関節と、
前記関節を駆動する駆動装置と、
前記駆動装置を制御する制御装置と、
前記体節、関節、駆動装置または制御装置のうち少なくとも一つに設けられ、
外界より比重の軽い流体が注入された浮嚢を有し、
浮心と重心が異なり、
外界に対する比重が1以上であることを特徴とするロボットシステム。
【請求項1】
複数の体節と、
前記体節同士をつなぐ関節と、
前記関節を駆動する駆動装置と、
前記駆動装置を制御する制御装置と、
前記体節、関節、駆動装置または制御装置のうち少なくとも一つに設けられ、
外界より比重の軽い流体が注入された浮嚢を有し、
浮心と重心が異なり、
外界に対する比重が1以上であることを特徴とするロボットシステム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【公開番号】特開2007−210100(P2007−210100A)
【公開日】平成19年8月23日(2007.8.23)
【国際特許分類】
【出願番号】特願2007−125064(P2007−125064)
【出願日】平成19年5月9日(2007.5.9)
【分割の表示】特願平11−277455の分割
【原出願日】平成11年9月29日(1999.9.29)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成19年8月23日(2007.8.23)
【国際特許分類】
【出願日】平成19年5月9日(2007.5.9)
【分割の表示】特願平11−277455の分割
【原出願日】平成11年9月29日(1999.9.29)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]