
ロボットシステム

【課題】モータの駆動を制御する駆動制御手段の制御内容を変更することなく、高トルク運転時にモータに対して十分な電力を供給可能とするか、または減速動作時にモータから生じる回生エネルギーを有効利用可能とする。
【解決手段】昇降圧回路29は、入力電圧を昇圧して出力する昇圧動作、入力電圧を降圧して出力する降圧動作および入力電圧をそのまま出力する非昇降圧動作のいずれかの動作を実行する。電源制御部26は、エコモードに設定されると、モータMの動作状態にかかわらず、降圧動作を実行するように昇降圧回路29の動作を制御する。電源制御部26は、トルク重視モードに設定されると、バス電圧の検出値に基づいてモータMが加速動作されていると考えられる期間に昇圧動作を実行するとともに、その期間を除く期間には非昇降圧動作を実行するように昇降圧回路29の動作を制御する。
【解決手段】昇降圧回路29は、入力電圧を昇圧して出力する昇圧動作、入力電圧を降圧して出力する降圧動作および入力電圧をそのまま出力する非昇降圧動作のいずれかの動作を実行する。電源制御部26は、エコモードに設定されると、モータMの動作状態にかかわらず、降圧動作を実行するように昇降圧回路29の動作を制御する。電源制御部26は、トルク重視モードに設定されると、バス電圧の検出値に基づいてモータMが加速動作されていると考えられる期間に昇圧動作を実行するとともに、その期間を除く期間には非昇降圧動作を実行するように昇降圧回路29の動作を制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ロボットの各軸を駆動するためのモータから減速動作時に回生するエネルギーを消費するための回生消費回路を備えたロボットシステムに関する。
【背景技術】
【0002】
ロボットの各関節(各軸)は、それぞれモータにより駆動されるようになっており、これらモータは、コントローラに内蔵されるモータアンプ(駆動手段)により駆動される。このモータアンプは、例えばインバータ回路を主体として構成されており、電源回路から一対の電源線を介して与えられる直流電圧(バス電圧)を所定の周波数を持つ交流電圧に変換してモータへの電力供給を行う。
【0003】
このような構成において、モータを減速動作させる際にはモータ側からモータアンプ側にエネルギーが回生され、これに伴いバス電圧が上昇する。このため、コントローラには、電源線に接続される各回路素子(インバータ回路のスイッチング素子、電源線間に接続されるコンデンサなど)の定格を超えてバス電圧が上昇しないように、上記回生されたエネルギー(回生エネルギー)を熱エネルギーに変換して放出する回生消費回路が設けられている。
【0004】
回生消費回路では、電源線間に直列に設けられた回生抵抗に回生電流を流すことで、回生エネルギーを熱エネルギーに変換している。つまり、回生エネルギーは、有効利用されることなく、回生消費回路により消費されていた。ロボットシステム全体としての省エネルギー化を図るため、上記回生エネルギーを有効に利用したいという要望がある。また、一方では、例えばモータの加速動作時など、高速運転時においても高いトルクを発生させたいという要望もある。高速運転時に高いトルクを発生するためには、それに見合うだけの高い電力をモータに供給する必要がある。
【0005】
特許文献1には、モータの加速時の手前の時点で出力電圧を上げ、モータの減速時の手前の時点で出力電圧を下げるコンバータ回路を備えたインバータ装置が開示されている。上記出力電圧の上昇および下降のタイミングについては、モータを制御するプログラムまたはパラメータにより指定される。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許第3974899号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1に記載された構成をロボットシステムに用いる場合、次のような問題が生じる。すなわち、ロボットシステムでは、各軸に対応する複数のモータの駆動を制御する駆動制御手段が設けられる。その駆動制御手段による制御(メイン制御)により、ロボットの手先位置が高精度に制御される。特許文献1記載の技術をロボットシステムに適用することを考える場合、出力電圧の上昇および下降(昇圧および降圧)のタイミングを決定するため、上記駆動制御手段によるメイン制御の内容を変更する必要が生じる。
【0008】
このようなモータの駆動制御に関するメイン制御の内容を変更することは、非常に煩雑な作業を伴うことになり、開発コストの増加に繋がる。また、その変更作業が行われる際に、変更に伴うミスが原因で上記手先位置の制御に誤差が生じる可能性もある。このような理由から、上記特許文献1記載の技術をロボットシステムに適用することは難しい。
【0009】
本発明は上記事情に鑑みてなされたものであり、その目的は、モータの駆動を制御する駆動制御手段の制御内容を変更することなく、高トルク運転時にモータに対して十分な電力を供給可能とするか、または減速動作時にモータから生じる回生エネルギーを有効利用可能とすることができるロボットシステムを提供することにある。
【課題を解決するための手段】
【0010】
請求項1に記載の手段によれば、ロボットの各軸を駆動するためのモータは、駆動手段によって駆動される。この駆動手段は、電源回路から出力電源線および基準電源線を介して与えられる出力電圧の供給を受けて動作する。そして、駆動制御手段は、モータの回転速度を回転速度指令に一致させるように駆動手段によるモータの駆動をフィードバック制御する。また、出力電源線および基準電源線間には、回生スイッチ手段および回生抵抗の直列回路からなる回生消費回路が設けられている。そして、回生制御手段は、上記出力電圧を検出する出力電圧検出手段の検出値が回生消費電圧値未満のときにあっては回生スイッチ手段をオフし、上記検出値が回生消費電圧値以上のときにあっては回生スイッチ手段をオンする。
【0011】
このような構成において、減速動作時にモータから回生されるエネルギー(回生エネルギー)は、出力電源線および基準電源線間に接続されたコンデンサに静電エネルギーとして蓄積される。つまり、モータの減速動作時には、回生エネルギーによりコンデンサが充電され、コンデンサの端子間電圧である出力電圧が上昇する。そして、出力電圧(出力電圧検出手段の検出値)が回生消費電圧値以上になると、回生消費回路の回生抵抗に電流を流すことで回生エネルギーを熱エネルギーとして放出し、出力電圧が回生消費電圧値未満になるようにその電圧上昇が抑えられる。
【0012】
電源回路は、昇圧動作、降圧動作および非昇降圧動作を選択的に実行するものであり、インダクタ、第1のスイッチ手段、第1のダイオード、第2のスイッチ手段、および第2のダイオードを備えている。第1のスイッチ手段は、入力電源線とインダクタの一方の端子との間に接続されている。第1のダイオードは、インダクタの一方の端子と基準電源線との間に、基準電源線側をアノードとして接続されている。第2のスイッチ手段は、インダクタの他方の端子と基準電源線との間に接続されている。第2のダイオードは、インダクタの他方の端子と出力電源線との間に、インダクタの他方の端子をアノードとして接続されている。
【0013】
電源回路が昇圧動作を実行する際には、電源制御手段により、第1のスイッチ手段がオンされた状態で、第2のスイッチ手段がスイッチング(チョッパ)される。これにより、電源回路は、入力電源線および基準電源線を介して与えられる入力電圧を昇圧して出力電源線および基準電源線を介して出力する昇圧コンバータとして機能する。電源回路が降圧動作を実行する際には、電源制御手段により、第2のスイッチ手段がオフされた状態で、出力電圧検出手段の検出値が降圧値となるように第1のスイッチ手段がスイッチング(チョッパ)される。なお、降圧値は、入力電圧の値よりも低い所定値である。これにより、電源回路は、入力電圧を降圧して出力する降圧コンバータとして機能する。電源回路が非昇降圧動作を実行する際には、第1のスイッチ手段がオンされるとともに、第2のスイッチ手段がオフされる。これにより、電源回路は、入力電圧を昇圧および降圧のいずれもすることなく出力する。なお、このときの出力電圧は、第1のスイッチ手段のオン状態での抵抗およびインダクタの等価直列抵抗による電圧降下分と、第2のダイオードの順方向電圧とを併せた分だけ入力電圧よりも低いものとなる。
【0014】
電源制御手段は、外部から与えられるモード設定指令および出力電圧検出手段の検出値に応じて、電源回路の動作を制御する。具体的には、電源制御手段は、エコモードの設定を指令するモード設定指令が与えられると、降圧動作を実行するように電源回路の動作を制御する。電源回路が降圧動作を実行する場合、出力電圧は通常の電圧値(入力電圧の値にほぼ等しい電圧値)よりも低い降圧値まで降圧される。このため、モータの減速動作時、回生エネルギーにより上昇する出力電圧(コンデンサの端子間電圧)が回生消費電圧値に達するまでにコンデンサに蓄積可能なエネルギー量は、出力電圧を通常の電圧値にした場合(従来の構成)に比べると、通常の電圧値と降圧値との差に応じた量だけ多くなる。すなわち、コンデンサの空き容量を従来の構成に比べて増加させることで、減速動作時にコンデンサにより多くのエネルギーを蓄積することが可能となる。
【0015】
このように、出力電圧を降圧値まで低下させることによって、減速動作時にコンデンサの端子間電圧が回生消費電圧値まで上昇しなければ、回生エネルギーを全て有効利用することができる。また、減速動作時にコンデンサの端子間電圧が回生消費電圧値まで上昇する場合でも、出力電圧を通常の電圧値にした場合に比べると、回生消費回路の動作時間を短くすることができるため、回生消費回路により消費されるエネルギー(無駄になるエネルギー)を低減し、残りの回生エネルギーを有効利用することが可能となる。
【0016】
また、電源制御手段は、トルク重視モードの設定を指令するモード設定指令が与えられると、最初は非昇降圧動作を実行するように電源回路の動作を制御する。さて、モータの加速動作が開始されると、モータにおける電力消費が多くなるため、出力電圧(出力電圧検出手段の検出値)は、定常値(この場合、入力電圧の値)から次第に低下する。そして、モータの加速動作が終了すると、モータにおける電力消費が少なくなるため、出力電圧の低下は収まる。本手段では、このようなモータの動作状態と出力電圧との関係に着目し、以下のように、加速動作期間と、それ以外の期間(非動作期間、等速動作期間、減速動作期間)とにおいて、電源回路の動作状態を切り替える。
【0017】
すなわち、電源制御手段は、非昇降圧動作の実行中、出力電圧検出手段の検出値が入力電圧の値より低い所定の加速開始判定値を下回ると、昇圧動作を実行するように電源回路の動作を制御する。これにより、加速動作が開始されたと考えられる時点から電源回路が昇圧動作を実行する。電源回路が昇圧動作を実行する場合、入力電圧を昇圧した出力電圧が駆動手段に供給される。このため、駆動手段は、比較的高い出力電圧の供給を受けてモータを駆動することができる。従って、電源回路が昇圧動作を実行することで、高いトルクを得るために十分な電力をモータに供給することが可能となる。これにより、例えばモータの高速回転状態のときにおいても高いトルクを出すことが可能になる。
【0018】
このとき、電源回路から出力される出力電圧は、昇圧動作により昇圧されるものの、モータの加速動作に伴う電力消費が多いため、その上昇の傾きは非常に緩やかなものとなる。その後、モータの加速動作が終了すると、モータにおける電力消費が少なくなるため、出力電圧は昇圧動作により急激に上昇する。このようなことを踏まえ、電源制御手段は、昇圧動作の実行中、出力電圧検出手段の検出値が入力電圧の値より高い所定の加速終了判定値を上回ると、非昇降圧動作を実行するように電源回路の動作を制御する。これにより、加速動作が終了されたと考えられる時点から電源回路が再び非昇降圧動作を実行する。
【0019】
上記したように、本手段によれば、エコモードに設定されると、電源制御手段は、出力電圧を通常の電圧値(入力電圧の値にほぼ等しい電圧値)よりも低い降圧値まで降圧するように電源回路の動作を制御する。これにより、出力電圧を通常の電圧値にした場合に比べ、コンデンサの空き容量が増加するので、減速動作時にコンデンサにより多くのエネルギーを蓄積することが可能となる。一方、トルク重視モードに設定されると、電源制御手段は、出力電圧検出手段の検出値に基づいて、モータが加速動作する期間中に出力電圧を昇圧するように電源回路の動作を制御する。これにより、モータの加速動作時に入力電圧を昇圧した出力電圧が駆動手段に供給され、高いトルクを出すことが本来的に必要となる加速動作時において、その高いトルクを得るために十分な電力をモータに供給することが可能となる。また、トルク重視モードに設定された場合であっても、モータが加速動作される期間以外の期間には、出力電圧の昇圧は行われない。そのため、減速動作時におけるコンデンサの空き容量は従来と同等となり、従来に比べて回生エネルギーの回収効率が悪化することはない。
【0020】
このように、本手段によれば、高トルク運転時にモータに対して十分な電力を供給可能とするトルク重視モードと、減速動作時にモータから生じる回生エネルギーを有効利用可能とするエコモードとを選択的に設定することができる。従って、高トルク出力が重視される用途、および電力消費の低減が重視される用途のいずれに対しても、上記モードの設定によって対応することができる。また、トルク重視モードでは、直接的にモータの動作状態を判断することなく、出力電圧の検出値から間接的にモータの動作状態を判断し、その判断結果に基づいて、電源回路の動作状態を上記したように自動的に切り替えるようにしている。そのため、本手段によれば、モータの駆動を制御する駆動制御手段の制御内容を変更することなく、上記した作用および効果を得ることができる。
【0021】
請求項2に記載の手段によれば、モータの異常を検出する異常検出手段を備えている。また、電源回路は、インダクタの一方の端子と出力電源線との間に接続される第3のスイッチ手段を備えている。電源制御手段は、異常検出手段によりモータの異常が検出されると、または、外部から緊急停止を指令する緊急停止指令が与えられると、以下のようにしてモータに対してダイナミックブレーキをかける。すなわち、電源制御手段は、そのときの電源回路の動作状態にかかわらず、第1のスイッチ手段をオフするとともに第2のスイッチ手段をオンし、さらに第3のスイッチ手段をオンする。これにより、モータの相間が第3のスイッチ手段、インダクタおよび第2のスイッチ手段を介して短絡された状態になる。また、一般に、スイッチ手段はオンの状態であっても抵抗値がゼロであることはなく、所定の抵抗(オン抵抗)を有しており、インダクタは所定の等価直列抵抗を有している。
【0022】
すなわち、モータの相間が所定の抵抗を介して短絡された状態になり、モータに対してダイナミックブレーキがかけられた状態となる。通常、ダイナミックブレーキをかけるためには、出力電源線および基準電源線間に、ダイナミックブレーキ専用のスイッチ手段および抵抗を直列に設ける必要がある。本手段によれば、電源回路の各スイッチ手段およびインダクタを用いて、ダイナミックブレーキをかけることが可能となるため、ダイナミックブレーキ専用のスイッチ手段および抵抗を設ける必要がなくなり、その分だけ回路構成を簡単化し、コスト低減を図ることが可能となる。
【図面の簡単な説明】
【0023】
【図1】本発明の一実施形態を示すロボットシステムの電気構成図
【図2】ロボットシステムの構成を概略的に示す図
【図3】回生消費回路の動作制御の内容を示すフローチャート
【図4】一連の動作を行う際の回転速度およびバス電圧を示す図
【図5】モータ制御の内容を等価的に示すブロック図
【図6】初期制御の内容を示すフローチャート
【図7】エコモード設定時の電源制御部の制御内容を示すフローチャート
【図8】エコモード設定時の回転速度、バス電圧および各スイッチの状態を示す図
【図9】トルク重視モード設定時の図7相当図
【図10】トルク重視モード設定時の図8相当図
【図11】ダイナミックブレーキ制御が実行される際の図8相当図
【発明を実施するための形態】
【0024】
以下、本発明の一実施形態について図面を参照しながら説明する。
図2は、一般的な産業用ロボットのシステム構成を示している。図2に示すロボットシステム1は、ロボット2と、ロボット2を制御するコントローラ3と、コントローラ3に接続されたティーチングペンダント4とから構成されている。
【0025】
ロボット2は、例えば6軸の垂直多関節型ロボットとして構成されている。ロボット2は、ベース5と、ベース5に水平方向に回転可能に支持されたショルダ部6と、ショルダ部6に上下方向に回転可能に支持された下アーム7と、下アーム7に上下方向に回転可能に支持された第1の上アーム8と、第1の上アーム8に捻り回転可能に支持された第2の上アーム9と、第2の上アーム9に上下方向に回転可能に支持された手首10と、手首10に捻り回転可能に支持されたフランジ11とから構成されている。
【0026】
ベース5、ショルダ部6、下アーム7、第1の上アーム8、第2の上アーム9、手首10およびフランジ11は、ロボット2のアームとして機能し、アーム先端であるフランジ11には、図示はしないが、エンドエフェクタ(手先)が取り付けられる。ベース5、ショルダ部6、下アーム7、第1の上アーム8、第2の上アーム9、手首10およびフランジ11は、ロボット2のアームとして機能する。ロボット2の各アーム(複数の軸)はそれぞれに対応して設けられるモータ(図1に符号Mを付して示す)により駆動される。各モータの近傍には、それぞれの回転軸の回転位置を検出するための位置検出器(図示せず)が設けられている。
【0027】
ティーチングペンダント4は、例えば使用者が携帯あるいは手に所持して操作可能な程度の大きさで、例えば薄型の略矩形箱状に形成されている。ティーチングペンダント4には、各種のキースイッチ12が設けられており、使用者は、キースイッチ12により種々の入力操作を行う。ティーチングペンダント4は、ケーブルを経由してコントローラ3に接続され、通信インターフェイスを経由してコントローラ3との間で高速のデータ転送を実行するようになっており、キースイッチ12の操作により入力された操作信号等の情報はティーチングペンダント4からコントローラ3へ送信される。
【0028】
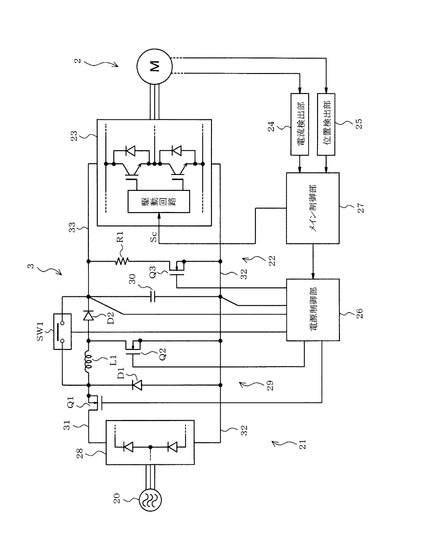
図1は、ロボットシステムの電気構成を概略的に示すブロック図である。ロボット2には、各軸をそれぞれ駆動するための複数のモータM(図1では1つのみ示す)が設けられている。モータMは例えばブラシレスDCモータである。コントローラ3には、交流電源20より供給される交流を整流および平滑して出力する直流電源回路21、回生消費回路22、モータMを駆動するインバータ装置23、電流検出部24、位置検出部25、直流電源回路21の動作を制御する電源制御部26およびこれら各装置の制御などを行うメイン制御部27が設けられている。
【0029】
直流電源回路21は、整流回路28、昇降圧回路29および平滑用のコンデンサ30から構成されている。整流回路28は、ダイオードをブリッジの形態に接続してなる周知構成のものである。整流回路28の交流入力端子には、例えば3相200Vの交流電源20の各相出力が与えられる。整流回路28の直流出力端子は、それぞれ入力電源線31および基準電源線32に接続されている。
【0030】
昇降圧回路29(電源回路に相当)は、トランジスタQ1、Q2、インダクタL1、ダイオードD1、D2およびスイッチSW1を備えている。トランジスタQ1(第1のスイッチ手段に相当)は、Nチャネル型のパワーMOSFETであり、そのドレインは入力電源線31に接続され、そのソースはインダクタL1の一方の端子に接続されている。ダイオードD1(第1のダイオードに相当)は、インダクタL1の一方の端子と基準電源線32との間に、基準電源線32側をアノードとして接続されている。トランジスタQ2(第2のスイッチ手段に相当)は、Nチャネル型のパワーMOSFETであり、そのドレインはインダクタL1の他方の端子に接続され、そのソースは基準電源線32に接続されている。
【0031】
ダイオードD2(第2のダイオードに相当)は、インダクタL1の他方の端子と出力電源線33との間に、インダクタL1の他方の端子側をアノードとして接続されている。スイッチSW1(第3のスイッチ手段に相当)は、例えばリレーなどの機械式のスイッチであり、インダクタL1の一方の端子と出力電源線33との間に接続されている。なお、スイッチSW1は、例えばパワーMOSFETやバイポーラトランジスタなど、半導体スイッチング素子により構成してもよい。出力電源線33および基準電源線32の間には、コンデンサ30が接続されている。
【0032】
昇降圧回路29は、昇圧動作、降圧動作および非昇降圧動作のうち、いずれかの動作を実行するようになっている。昇圧動作は、入力電源線31および基準電源線32を介して与えられる入力電圧(整流回路28から出力される直流電圧)を昇圧して出力電源線33および基準電源線32を介して出力するものである。降圧動作は、入力電圧を降圧して出力電源線33および基準電源線32を介して出力するものである。非昇降圧動作は、入力電圧を昇圧および降圧のいずれもすることなく出力電源線33および基準電源線32を介して出力するものである。
【0033】
昇降圧回路29による上記各動作は、トランジスタQ1、Q2の駆動状態およびスイッチSW1の開閉状態に応じて切り替えられる。トランジスタQ1、Q2の駆動およびスイッチSW1の開閉は、電源制御部26により制御される。すなわち、本実施形態では、電源制御部26が、昇降圧回路29の動作を制御する電源制御手段に相当する。
【0034】
電源制御部26は、CPU、ROM、RAM、I/Oなどを備えたマイクロコンピュータを主体として構成されている。電源制御部26は、出力電源線33および基準電源線32間のバス電圧BV(出力電圧)の値を検出する出力電圧検出手段としての機能を備えている。このような機能を備えた電源制御部26は、メイン制御部27から与えられる指令信号およびバス電圧BVの検出値に応じて、昇降圧回路29の動作を制御する。
【0035】
電源制御部26は、昇圧動作を実行する場合、スイッチSW1をオフするとともにトランジスタQ1をオンした状態で、バス電圧BVの検出値が昇圧値BVHとなるようにトランジスタQ2をスイッチング(チョッパ)する。なお、昇圧値BVHは、入力電圧の値(例えば、約282V)よりも高い所定値とする。これにより、昇降圧回路29は、入力電圧を昇圧して出力する昇圧コンバータとして機能する。ただし、昇降圧回路29が上記昇圧動作を実行している期間であっても、後述するモータMの加速動作期間では、バス電圧BVは昇圧値BVHより低くなる。
【0036】
電源制御部26は、降圧動作を実行する場合、スイッチSW1およびトランジスタQ2をオフした状態で、バス電圧BVの検出値が降圧値BVLとなるようにトランジスタQ1をスイッチング(チョッパ)する。なお、降圧値BVLは、入力電圧の値よりも低く、且つモータMを駆動するために最低限必要な電圧値であればよく、直流電源回路21、モータM、インバータ装置23などの仕様に応じて適宜変更すればよい。これにより、昇降圧回路29は、入力電圧を降圧して出力する降圧コンバータとして機能する。ただし、昇降圧回路29が上記降圧動作を実行している期間であっても、後述する回生エネルギーが生じる期間では、バス電圧BVは降圧値BVLより上昇する。
【0037】
電源制御部26は、非昇降圧動作の実行をする場合、スイッチSW1およびトランジスタQ2をオフするとともにトランジスタQ1をオンする。これにより、昇降圧回路29は、入力電圧を昇圧および降圧のいずれもすることなく出力する。このときの出力電圧(バス電圧BV)は、トランジスタQ1のオン抵抗(オン状態での抵抗)およびインダクタL1の等価直列抵抗による電圧降下分と、ダイオードD2の順方向電圧とを合わせた分だけ入力電圧よりも低い値である通常値BVMとなる。
【0038】
回生消費回路22は、出力電源線33および基準電源線32間に回生抵抗R1およびトランジスタQ3(回生スイッチ手段に相当)の直列回路を接続して構成されている。トランジスタQ3は、Nチャネル型のパワーMOSFETであり、そのオン、オフは、電源制御部26により制御される。すなわち、本実施形態において、電源制御部26は、回生消費回路22の動作を制御する回生制御手段に相当する。
【0039】
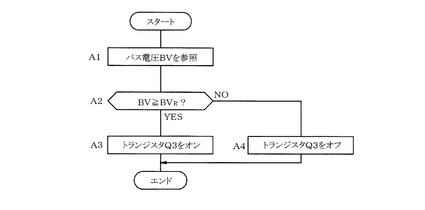
図3は、電源制御部26による回生消費回路22の動作制御の内容を示している。なお、電源制御部26は、図3に示す制御を所定周期毎に実行するようになっている。まず、電源制御部26は、その時点におけるバス電圧BV(の検出値)を参照する(ステップA1)。続いて、電源制御部26は、参照したバス電圧BVが回生消費電圧値BVR以上であるか否かを判断する(ステップA2)。バス電圧BVが回生消費電圧値BVR以上である場合(YES)には、トランジスタQ3をオン駆動し(ステップA3)、制御を終了する。一方、バス電圧BVが回生消費電圧値BVR未満である場合(NO)には、トランジスタQ3をオフ駆動し(ステップA4)、制御を終了する。なお、ステップA3またはA4において、既にトランジスタQ3がオンまたはオフされている場合には、その状態を維持したまま制御を終了する。
【0040】
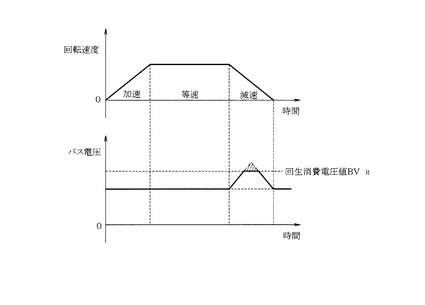
図4は、ロボットが加速、等速、減速という一連の動作を行う際におけるモータMの回転速度とバス電圧とを示している。図4に示すように、減速動作時にはモータMから回生されるエネルギー(回生エネルギー)に起因してバス電圧BVが上昇する。そして、バス電圧BVが回生消費電圧値BVRを超えようとすると、回生抵抗R1に電流が流れることで回生エネルギーが熱エネルギーとして放出され、バス電圧BVが回生消費電圧値BVR未満となるようにその電圧上昇が抑えられる。
【0041】
回生消費電圧値BVRは、出力電源線33および基準電源線32に接続される各回路素子(インバータ装置23のスイッチング素子、直流電源回路21のコンデンサ30など)の定格を超えてバス電圧BVが上昇しないような値に設定すればよい。また、回生消費電圧値BVR、昇圧値BVH、通常値BVMおよび降圧値BVLは、下記(1)式の関係を満たすように設定すればよい。
BVR>BVH>BVM>BVL …(1)
【0042】
なお、回生スイッチ手段としてのトランジスタQ3は、パワーMOSFETに限らずともよく、例えばバイポーラトランジスタなどの他の半導体スイッチング素子により構成してもよい。また、回生スイッチ手段としては、例えばリレーなどの機械式のスイッチで構成してもよい。
【0043】
インバータ装置23(駆動手段に相当)は、出力電源線33および基準電源線32間に6つのスイッチング素子例えばIGBT(図1には2つのみ示す)を三相フルブリッジ接続して構成されたインバータ主回路と、その駆動回路とを6組備えている(図1には1組のみ示す)。IGBTのコレクタ・エミッタ間には還流ダイオードが接続されている。また、IGBTのゲートには、駆動回路からゲート信号が与えられている。駆動回路は、メイン制御部27から与えられる指令信号(通電指令Sc)に基づいてパルス幅変調されたゲート信号(PWM信号)を出力して各IGBTを駆動する。
【0044】
メイン制御部27(駆動制御手段に相当)は、CPU、ROM、RAM、I/Oなどを備えたマイクロコンピュータを主体として構成されている。電流検出部24は、モータMに流れる電流を検出する電流検出器(図示せず)からの検出信号をメイン制御部27に入力可能なデータに変換して出力する。位置検出部25は、モータMの回転位置を検出する位置検出器(図示せず)からの検出信号をメイン制御部27に入力可能なデータに変換して出力する。メイン制御部27は、電流検出部24から出力されるデータを元にモータMに流れる電流の値を取得するとともに、位置検出部25から出力されるデータを元にモータMの回転位置および回転速度を取得する。詳細は後述するが、メイン制御部27は、このようにして取得した電流値、回転位置および回転速度を用いてインバータ装置23によるモータMの駆動をフィードバック制御する。また、メイン制御部27は、電源制御部26に対し、各種の指令信号を出力する。
【0045】
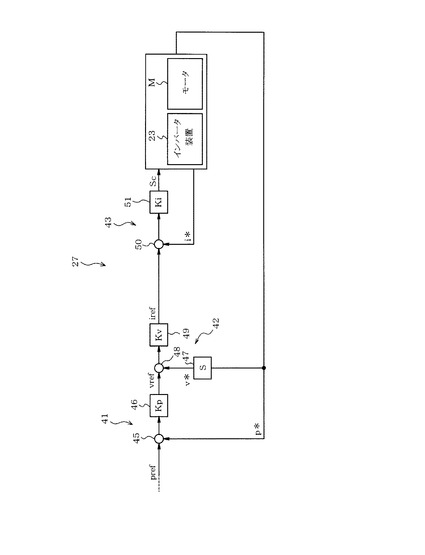
図5は、ロボットシステム1におけるモータ制御の内容を等価的に示したブロック図である。図5に示すように、メイン制御部27は、位置制御部41、速度制御部42および電流制御部43を備えている。なお、図5では、1つのモータMの制御に係る構成のみを示しているが、実際には全てのモータMのそれぞれに対応して同様の構成が設けられている。さて、一般に産業用のロボットは、予めティーチングなどを実施することにより作成される所定の動作プログラムに従って動作するようになっている。図示しない上位制御部は、その動作プログラムを解釈し、ロボット2に動作プログラムに従った動作を行わせるように各モータMを制御するための指令値(位置指令pref)を位置制御部41に出力する。
【0046】
位置制御部41は、上位制御部から与えられる位置指令prefに対する現在の回転位置p*の偏差を求める減算器45と、減算器45の出力(偏差)をゼロに近づけるように速度指令vref(回転速度指令に相当)を出力する位置制御アンプ46とから構成されている。位置制御アンプ46のゲインはKpとなっている。速度制御部42は、微分器47、減算器48および速度制御アンプ49により構成されている。微分器47は、現在の回転位置p*を微分して現在の回転速度v*に変換する。減算器48は、速度指令vrefに対する現在の回転速度v*の偏差を求める。速度制御アンプ49は、減算器48の出力(偏差)をゼロに近づけるように電流指令irefを出力する。速度制御アンプ49のゲインはKvとなっている。
【0047】
電流制御部43は、電流指令irefに対する現在のモータMに流れる電流i*の偏差を求める減算器50と、減算器50の出力(偏差)をゼロに近づけるようにインバータ装置23に対する指令信号(通電指令Sc)を出力する電流制御アンプ51とから構成されている。電流制御アンプ51のゲインはKiとなっている。このような構成により、メイン制御部27は、電流フィードバック制御、速度フィードバック制御および位置フィードバック制御を行い、モータMの駆動をフィードバック制御してロボット2のアームの動作制御を行う。
【0048】
さて、電源制御部26は、昇降圧回路29の動作制御に関する2つの制御モード(トルク重視モードおよびエコモード)を有している。電源制御部26は、メイン制御部27から与えられる指令信号の一つであるモード選択フラグfmの状態に応じて、上記各制御モードのうち、いずれかの制御モードに設定される。本実施形態において、モード選択フラグfmは、例えばユーザがティーチングペンダント4のキースイッチ12を操作することでコントローラ3に与えられる動作指令に応じて設定されるようになっている。なお、モード選択フラグfmは、図示しない上位の制御機器とコントローラ3との通信により設定されるものでもよい。また、モード選択フラグfmは、例えば1ビットとしている。
【0049】
モード選択フラグが「0」である場合、電源制御部26はエコモードに設定される。電源制御部26は、エコモードに設定されると、モータMの動作状態にかかわらず、降圧動作を実行するように昇降圧回路29の動作を制御する。モード選択フラグfmが「1」である場合、電源制御部26はトルク重視モードに設定される。電源制御部26は、トルク重視モードに設定されると、モータMの動作状態に応じて昇降圧回路29の動作状態を自動的に切り替える。すなわち、電源制御部26は、トルク重視モードに設定されると、バス電圧BVの検出値に基づいてモータMが加速動作状態であると判断される期間には昇圧動作を実行し、その期間を除く期間には非昇降圧動作を実行するように昇降圧回路29の動作を制御する(詳細は後述する)。
【0050】
また、電源制御部26は、モータMに対するダイナミックブレーキをかけるように昇降圧回路29の動作を制御する機能(ダイナミックブレーキ制御)を有している。外部よりモータMの緊急停止を指令する緊急停止指令が与えられると、メイン制御部27から電源制御部26に対し、ダイナミックブレーキをオンする旨を示す指令が与えられる。これを受けて、電源制御部26は、以下のように昇降圧回路29の動作を制御する。すなわち、電源制御部26は、そのときに設定されている制御モードにかかわらず、トランジスタQ1をオフ駆動するとともに、トランジスタQ2をオン駆動し、さらにスイッチSW1をオンする。
【0051】
詳細は後述するが、このような制御により、モータMに対してダイナミックブレーキがかけられる。なお、コントローラ3がモータMの異常を検出する異常検出手段(図示せず)を備えた構成である場合には、その異常検出手段によりモータMの異常が検出されると、メイン制御部27から電源制御部26に対して上記指令が与えられて、上記した制御を実行してモータMに対するダイナミックブレーキをかけるように構成してもよい。
【0052】
次に、本実施形態の作用および効果について説明する。
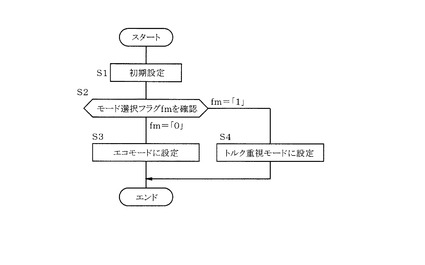
コントローラ3に電源が投入されると、電源制御部26は、図6に示す内容の初期制御を実行する。まず、ステップS1において、トランジスタQ1、Q2をオフ駆動するとともに、スイッチSW1をオフする初期設定が実行される。従って、この段階では、昇降圧回路29には、入力電圧が未だ供給されていない(電源遮断状態)。続いて、ステップS2において、モード選択フラグfmが参照される。そして、モード選択フラグfmが「0」であればエコモードに設定され(ステップS3)、「1」であればトルク重視モードに設定される。
【0053】
電源制御部26は、上記初期制御において設定された制御モードに応じて昇降圧回路29の動作を以下のように制御する。なお、電源制御部26は、以下のように昇降圧回路29の動作制御を行う際、図3に示した回生消費回路22の動作制御についても所定の周期毎に実行している。
【0054】
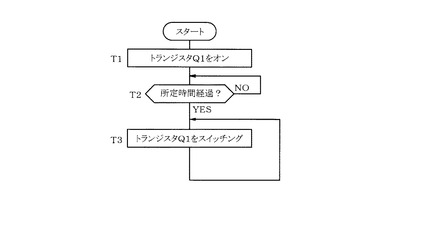
電源制御部26は、初期制御においてエコモードに設定されると、降圧動作を実行するように昇降圧回路29の動作を制御する。図7は、エコモードに設定された場合の電源制御部26の制御内容を示すフローチャートである。また、図8は、エコモードに設定された場合におけるモータMの回転速度、バス電圧、トランジスタQ1、Q2の駆動状態およびスイッチSW1の開閉状態を示している。エコモードに設定されると、トランジスタQ1がオン駆動される(図7のステップT1、図8の時刻ta)。これにより、昇降圧回路29から出力されるバス電圧BVは、通常値BVMに向けて上昇する。なお、トランジスタQ1がオンされた瞬間、交流電源20から直流電源回路21に対して突入電流が流れるが、その突入電流はトランジスタQ1のオン抵抗およびインダクタL1の等価直列抵抗により制限される。
【0055】
その後、所定時間が経過すると(図7のステップT2で「YES」)、その時点(図8の時刻tb)以降、バス電圧BVの検出値が降圧値BVLとなるようにトランジスタQ1がスイッチングされる(ステップT3)。これにより、昇降圧回路29から出力されるバス電圧BVが通常値BVMから降圧値BVLまで降圧される。そして、バス電圧BVが降圧値BVLに達した時点以降において、バス電圧BVの供給を受けたインバータ装置23によりモータMが駆動され、一連の動作が行われる。
【0056】
上記したようにエコモードに設定された場合、バス電圧BVは通常値BVMよりも低い降圧値BVLまで降圧される。そのため、モータMの減速動作時、回生エネルギーにより上昇するバス電圧BV(コンデンサ30の端子間電圧)が回生消費電圧値BVRに達するまでにコンデンサ30に蓄積可能なエネルギー量は、バス電圧BVが通常値BVMである場合(従来構成の場合)に比べると、下記(2)式に示すエネルギー量JCだけ多くなる。
JC={(1/2)・C・BVM2}−{(1/2)・C・BVL2}
=(1/2)・C・(BVM2−BVL2) …(2)
【0057】
上記(2)式に示すように、コンデンサ30に蓄積可能なエネルギー量は、通常値BVMと降圧値BVLとの差に応じた量JCだけ多くなる。すなわち、コンデンサ30の空き容量を従来構成の場合に比べて増加させることで、減速動作時にコンデンサ30に一層多くのエネルギーを蓄積することが可能になる。
【0058】
このように、バス電圧BVを降圧値BVLまで低下させることによって、減速動作時にコンデンサ30の端子間電圧が回生消費電圧値BVRまで上昇しなければ、回生エネルギーを全て有効利用することができる。また、減速動作時にコンデンサ30の端子間電圧が回生消費電圧値BVRまで上昇する場合でも、バス電圧BVが通常値BVMである従来構成の場合と比べると、回生消費回路22の動作時間を短くすることができるため、回生消費回路22により消費されるエネルギー(無駄になるエネルギー)を低減し、残りの回生エネルギーを有効利用することが可能となる。従って、回生エネルギーの回収を重視する用途においては、常にエコモードに設定することで、上記効果を確実に得ることが可能となる。
【0059】
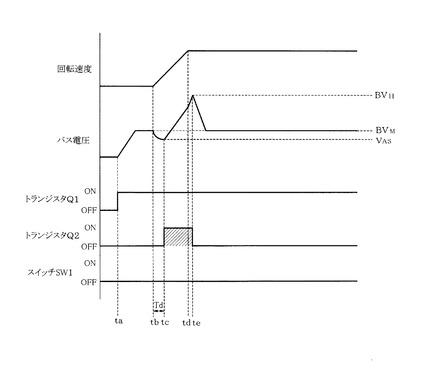
電源制御部26は、初期制御においてトルク重視モードに設定されると、図9に示す内容の電源自動切替制御を実行する。また、図10は、トルク重視モードに設定された場合における図8相当図である。この制御において、電源制御部26は、バス電圧BVの検出値に基づいてモータMが加速動作される期間を間接的に判断する。なお、ここでは全てのモータMの加速動作期間が互いに概ね一致するという前提が成立するものとしている。このような前提が成立しない場合には、全てのモータMのうち、最も高い加速度で動作するモータMの加速動作期間を判断すればよい。
【0060】
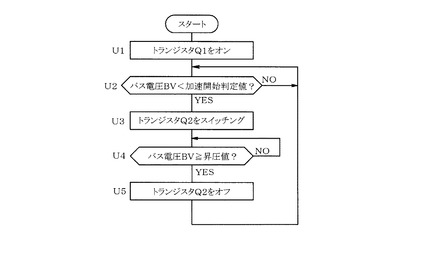
トルク重視モードに設定されると、トランジスタQ1がオン駆動される(図9のステップU1、図10の時刻ta)。これにより、昇降圧回路29から出力されるバス電圧BVは、通常値BVMに向けて上昇する。さて、モータMの加速動作が開始されると、モータMにおける電力消費が多くなるため、バス電圧BVは、通常値BVMから次第に低下する。その後、モータMの加速動作が終了すると、通常は等速動作に移行するため、モータMにおける電力消費が少なくなり、バス電圧BVの低下が収まる。本実施形態では、このようなモータMの動作状態とバス電圧BVとの関係に着目し、次のように、バス電圧BVの検出値に基づいてモータMの加速動作期間を判断する。
【0061】
すなわち、ステップU2では、バス電圧BVの検出値が加速開始判定値VAS未満であるか否かが判断される。なお、ステップU2では、バス電圧BVがノイズなどの影響により変動した際に誤判断してしまう事態を防止するため、バス電圧BVの検出値が所定回数(または所定時間)連続して加速開始判定値VAS未満である場合に「YES」と判断する。
【0062】
加速開始判定値VASは、通常値BVMより低い値であれば適宜変更可能である。なお、加速開始判定値VASを高く設定するほど、実際に加速動作が開始された時点(図10の時刻tb)からステップU2で「YES」と判断される時点(図10の時刻tc)までの遅延時間Tdが短くなる。つまり、加速開始判定値VASを高く設定するほど、モータMの加速動作開始時点の判定精度が高まる。ただし、この場合、ノイズなどにより誤判断する可能性が高まる。これに対し、加速開始判定値VASを低く設定するほど、上記遅延時間が長くなる。つまり、加速開始判定値VASを低く設定するほど、モータMの加速動作開始時点の判定精度が低くなる。ただし、この場合、ノイズなどにより誤判断する可能性が低くなる。
【0063】
バス電圧BVの検出値が加速開始判定値VAS未満であると判断されると(ステップU2で「YES」、図10の時刻tc)、ステップU3に進む。ステップU3では、バス電圧BVの検出値が昇圧値BVHとなるようにトランジスタQ2がスイッチングされる。これにより、昇降圧回路29から出力されるバス電圧BVが通常値BVMから昇圧値BVHに向けて昇圧される。そのため、インバータ装置23は、整流回路28から出力される電圧がそのままインバータ装置に供給されていた従来の構成に対し、比較的高いバス電圧BVの供給を受けてモータMを駆動することになる。従って、トルク重視モードに設定された場合、インバータ装置23は、加速動作期間において、高いトルクを得るために十分な電力をモータMに供給することができる。これにより、例えばモータMの高速回転状態のときにおいても高いトルクを出すことが可能になる。
【0064】
このとき、昇降圧回路29から出力されるバス電圧BVは、昇圧動作により昇圧されるものの、モータMの加速動作に伴う電力消費の増加により、その上昇の傾きは非常に緩やかなものとなる(図10の時刻tc〜td)。そのため、モータMの加速動作期間において、バス電圧BVが昇圧値BVHまで上昇することはない。逆に言えば、昇圧値BVHは、装置の仕様を考慮した上で、このような条件を満たす値に設定しておくことが必要である。
【0065】
その後、モータMの加速動作が終了すると、等速動作に移行するため、モータMにおける電力消費が少なくなる(図10の時刻td)。これにより、バス電圧BVは、昇圧動作により急激に上昇する。そこで、ステップU4では、バス電圧BVの検出値が昇圧値BVHに達したか否かが判断される。本実施形態では、昇圧値BVHが加速動作の終了時点を判定する加速終了判定値に相当する。バス電圧BVの検出値が昇圧値VHに達したと判断されると(ステップU4で「YES」、図10の時刻te)、ステップU5に進む。ステップU5では、トランジスタQ2がオフ駆動される。これにより、昇降圧回路29が非昇降圧動作を実行することになり、バス電圧BVは、通常値BVMに向けて低下する。
【0066】
ステップU5の実行後は、ステップU2に戻り、次の加速動作が開始されると判断されるまでの間(ステップU2で「NO」の間)、非昇降圧動作が継続される。そのため、非昇降圧動作を実行する昇降圧回路29から出力されるバス電圧BVの供給を受けたインバータ装置23によりモータMが駆動され、等速動作および減速動作が行われる。
【0067】
以上説明したように、電源制御部26は、エコモードに設定されると、バス電圧BVを通常値BVMよりも低い降圧値BVLまで降圧する降圧動作を実行するように昇降圧回路29の動作を制御する。これにより、バス電圧BVを通常値BVMにした場合(従来の構成)に比べ、コンデンサ30に蓄積可能なエネルギー量が、上記(2)式に示した量だけ多くなる。すなわち、従来構成の場合に比べ、コンデンサ30の空き容量が増加するので、モータMの減速動作時にコンデンサ30に一層多くのエネルギーを静電エネルギーとして蓄積することが可能となる。
【0068】
また、電源制御部26は、トルク重視モードに設定されると、バス電圧BVの検出値に基づいて、モータMが加速動作を開始したと考えられる時点(実際の加速開始から所定の遅延時間経過後の時点)から加速動作を終了したと考えられる時点(実際の加速終了から所定の遅延時間経過後の時点)までの期間中、バス電圧BVを昇圧する昇圧動作を実行するように昇降圧回路29の動作を制御する。これにより、モータMの加速動作時に昇圧されたバス電圧BVがインバータ装置23に供給され、高いトルクを出すことが本来的に必要となる加速動作時において、その高いトルクを得るために十分な電力をモータMに供給することが可能となる。トルク重視モードに設定された場合であっても、モータMが加速動作されると考えられる期間を除く期間には、バス電圧BVの昇圧は行われない。そのため、減速動作時におけるコンデンサ30の空き容量は従来と同等となり、従来に比べて回生エネルギーの回収効率が悪化することはない。
【0069】
このように、本実施形態によれば、高トルク運転時(加速動作時)にモータMに対して十分な電力を供給可能とするトルク重視モードと、減速動作時にモータMから生じる回生エネルギーを積極的に有効利用可能とするエコモードとを選択的に設定することが可能となっている。従って、高トルク出力が重視される用途および電力消費の低減が重視される用途のいずれに対しても、上記モードの設定によって対応することができる。また、トルク重視モードでは、直接的にモータMの動作状態を判断することなく、バス電圧BVの検出値から間接的にモータMの動作状態(加速動作状態)を判断し、その判断結果に基づいて、昇降圧回路29の動作状態を上記したように自動的に切り替えるようにしている。そのため、電源制御部26の制御内容を単純化することができる。また、モータMの駆動を制御するメイン制御部27の制御内容を変更することなく、上記した作用および効果を得ることができる。
【0070】
一般に、電源に関する制御を行う電源制御部26と、モータMの駆動に関する制御を行うメイン制御部27とは、互いに異なる担当者(担当グループ)により開発される。本実施形態によれば、メイン制御部27の制御内容を変更することなく電源制御部26の制御内容を変更すればよいため、従来構成からの制御(ソフトウエア)に関する改良部分が少なくなる。したがって、ソフトウエア開発が容易になり、その開発コストを抑えることができるという効果が得られる。
【0071】
また、電源回路には、電源投入時における突入電流を制限するため、電源の入力ラインに直列に介在するように突入電流制限用の抵抗が設けられるとともに、その抵抗の端子間を短絡するスイッチ手段(例えば機械式のリレーなど)が設けられることが一般的である。これに対し、本実施形態によれば、昇降圧回路29が昇降圧動作を実行するために本来的に必要となる構成(トランジスタQ1、インダクタL1)により突入電流が制限される。このため、突入電流制限用の抵抗およびスイッチ手段を設ける必要がなくなり、その分だけ回路構成を簡単化し、製造コストの低減を図ることができる。
【0072】
さらに、電源回路には、電源供給を遮断可能にするため、交流電源から直流電源回路に対する電源供給経路に直列に介在するように電磁接触器(コンタクタ)などが設けられることが一般的である。本実施形態では、昇降圧回路29に対する入力電圧の供給を遮断する電源遮断状態に設定することができるため、その電磁接触器を省略することが可能である。電磁接触器などが省略されれば、その分だけ回路構成を簡単化し、製造コストの低減を図ることができる。
【0073】
続いて、電源制御部26によるダイナミックブレーキ制御について説明する。図11は、ダイナミックブレーキ制御が実行される場合におけるモータMの回転速度、バス電圧、トランジスタQ1、Q2の駆動状態、スイッチSW1の開閉状態を示している。なお、ここでは、電源制御部26がエコモードに設定された場合におけるダイナミックブレーキ制御について説明するが、ダイナミックブレーキ制御は、電源制御部26が他の制御モード(トルク重視モード)に設定された場合であっても同様に実行される。
【0074】
電源制御部26は、図11の時刻taの時点において緊急停止指令が与えられると、そのときに設定されている制御モードにかかわらず、トランジスタQ1をオフ駆動するとともに、トランジスタQ2をオン駆動し、さらにスイッチSW1をオンする。これにより、モータMの相間がスイッチSW1、インダクタL1、トランジスタQ2を介して短絡された状態になる。
【0075】
スイッチSW1は、オン状態であっても所定の抵抗値を有している。また、インダクタL1は、所定の等価直列抵抗を有している。さらに、パワーMOSFETであるトランジスタQ2は、所定のオン抵抗を有している。このようなことから、モータMの相間が、スイッチSW1のオン時の抵抗、インダクタL1の等価直列抵抗およびトランジスタQ2のオン抵抗を介して短絡され、モータMに対してダイナミックブレーキがかけられる。これにより、モータMは、その回転速度が急激に低下し、図11の時刻tbの時点において停止する。また、この際、トランジスタQ1がオフされているため、バス電圧BVも回転速度と同様に急激に低下し、時刻tbの時点においてゼロになる。
【0076】
通常、ダイナミックブレーキをかけるためには、バス電圧BVを供給する電源線間(出力電源線33および基準電源線32間)に、ダイナミックブレーキ専用のスイッチ手段および抵抗を直列に設ける必要がある。これに対し、本実施形態によれば、電源制御部26が上記したダイナミックブレーキ制御を行うことにより、昇降圧回路29のスイッチSW1、インダクタL1およびトランジスタQ2を用いて、ダイナミックブレーキをかけることが可能となる。このため、ダイナミックブレーキ専用のスイッチ手段および抵抗を設ける必要がなくなり、その分だけ回路構成を簡単化し、製造コストの低減を図ることができる。
【0077】
なお、本発明は上記し且つ図面に記載した実施形態に限定されるものではなく、次のような変形または拡張が可能である。
電源制御部26によるダイナミックブレーキ制御については、必要に応じて設ければよい。ダイナミックブレーキ制御を設けない場合、スイッチSW1を省略できる。
電源制御部26は、非昇降圧動作を実行する場合、トランジスタQ1およびスイッチSW1をオンするとともに、トランジスタQ2をオフするように構成してもよい。このようにすれば、非昇降圧動作時における出力電圧(バス電圧BV)が、スイッチSW1のオン時の抵抗による電圧降下分だけ入力電圧より低い値になる。そして、インダクタL1、ダイオードD2による電力損失を低減するという効果が得られる。
【0078】
本発明は、モータMとしてDCブラシレスモータを用いた構成に限らず、例えば直流モータ、交流モータなど各種のモータを用いた構成にも適用可能である。なお、モータMとして直流モータを用いる場合には、モータMを駆動する駆動手段として、インバータ装置23に代えて、例えばHブリッジ回路を主体として構成された駆動回路を用いればよい。
上記実施形態では、本発明を6軸の垂直多関節型のロボット2に適用した例を説明したが、本発明は、各軸をモータにより駆動する構成のロボット全般に適用可能である。
【符号の説明】
【0079】
図面中、1はロボットシステム、2はロボット、22は回生消費回路、23はインバータ装置(駆動手段)、26は電源制御部(出力電圧検出手段、回生制御手段、電源制御手段)、27はメイン制御部(駆動制御手段)、29は昇降圧回路(電源回路)、30はコンデンサ、31は入力電源線、32は基準電源線、33は出力電源線、D1は第1のダイオード、D2は第2のダイオード、L1はインダクタ、Mはモータ、Q1はトランジスタ(第1のスイッチ手段)、Q2はトランジスタ(第2のスイッチ手段)、Q3はトランジスタ(回生スイッチ手段)、R1は回生抵抗、SW1はスイッチ(第3のスイッチ手段)を示す。
【技術分野】
【0001】
本発明は、ロボットの各軸を駆動するためのモータから減速動作時に回生するエネルギーを消費するための回生消費回路を備えたロボットシステムに関する。
【背景技術】
【0002】
ロボットの各関節(各軸)は、それぞれモータにより駆動されるようになっており、これらモータは、コントローラに内蔵されるモータアンプ(駆動手段)により駆動される。このモータアンプは、例えばインバータ回路を主体として構成されており、電源回路から一対の電源線を介して与えられる直流電圧(バス電圧)を所定の周波数を持つ交流電圧に変換してモータへの電力供給を行う。
【0003】
このような構成において、モータを減速動作させる際にはモータ側からモータアンプ側にエネルギーが回生され、これに伴いバス電圧が上昇する。このため、コントローラには、電源線に接続される各回路素子(インバータ回路のスイッチング素子、電源線間に接続されるコンデンサなど)の定格を超えてバス電圧が上昇しないように、上記回生されたエネルギー(回生エネルギー)を熱エネルギーに変換して放出する回生消費回路が設けられている。
【0004】
回生消費回路では、電源線間に直列に設けられた回生抵抗に回生電流を流すことで、回生エネルギーを熱エネルギーに変換している。つまり、回生エネルギーは、有効利用されることなく、回生消費回路により消費されていた。ロボットシステム全体としての省エネルギー化を図るため、上記回生エネルギーを有効に利用したいという要望がある。また、一方では、例えばモータの加速動作時など、高速運転時においても高いトルクを発生させたいという要望もある。高速運転時に高いトルクを発生するためには、それに見合うだけの高い電力をモータに供給する必要がある。
【0005】
特許文献1には、モータの加速時の手前の時点で出力電圧を上げ、モータの減速時の手前の時点で出力電圧を下げるコンバータ回路を備えたインバータ装置が開示されている。上記出力電圧の上昇および下降のタイミングについては、モータを制御するプログラムまたはパラメータにより指定される。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許第3974899号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1に記載された構成をロボットシステムに用いる場合、次のような問題が生じる。すなわち、ロボットシステムでは、各軸に対応する複数のモータの駆動を制御する駆動制御手段が設けられる。その駆動制御手段による制御(メイン制御)により、ロボットの手先位置が高精度に制御される。特許文献1記載の技術をロボットシステムに適用することを考える場合、出力電圧の上昇および下降(昇圧および降圧)のタイミングを決定するため、上記駆動制御手段によるメイン制御の内容を変更する必要が生じる。
【0008】
このようなモータの駆動制御に関するメイン制御の内容を変更することは、非常に煩雑な作業を伴うことになり、開発コストの増加に繋がる。また、その変更作業が行われる際に、変更に伴うミスが原因で上記手先位置の制御に誤差が生じる可能性もある。このような理由から、上記特許文献1記載の技術をロボットシステムに適用することは難しい。
【0009】
本発明は上記事情に鑑みてなされたものであり、その目的は、モータの駆動を制御する駆動制御手段の制御内容を変更することなく、高トルク運転時にモータに対して十分な電力を供給可能とするか、または減速動作時にモータから生じる回生エネルギーを有効利用可能とすることができるロボットシステムを提供することにある。
【課題を解決するための手段】
【0010】
請求項1に記載の手段によれば、ロボットの各軸を駆動するためのモータは、駆動手段によって駆動される。この駆動手段は、電源回路から出力電源線および基準電源線を介して与えられる出力電圧の供給を受けて動作する。そして、駆動制御手段は、モータの回転速度を回転速度指令に一致させるように駆動手段によるモータの駆動をフィードバック制御する。また、出力電源線および基準電源線間には、回生スイッチ手段および回生抵抗の直列回路からなる回生消費回路が設けられている。そして、回生制御手段は、上記出力電圧を検出する出力電圧検出手段の検出値が回生消費電圧値未満のときにあっては回生スイッチ手段をオフし、上記検出値が回生消費電圧値以上のときにあっては回生スイッチ手段をオンする。
【0011】
このような構成において、減速動作時にモータから回生されるエネルギー(回生エネルギー)は、出力電源線および基準電源線間に接続されたコンデンサに静電エネルギーとして蓄積される。つまり、モータの減速動作時には、回生エネルギーによりコンデンサが充電され、コンデンサの端子間電圧である出力電圧が上昇する。そして、出力電圧(出力電圧検出手段の検出値)が回生消費電圧値以上になると、回生消費回路の回生抵抗に電流を流すことで回生エネルギーを熱エネルギーとして放出し、出力電圧が回生消費電圧値未満になるようにその電圧上昇が抑えられる。
【0012】
電源回路は、昇圧動作、降圧動作および非昇降圧動作を選択的に実行するものであり、インダクタ、第1のスイッチ手段、第1のダイオード、第2のスイッチ手段、および第2のダイオードを備えている。第1のスイッチ手段は、入力電源線とインダクタの一方の端子との間に接続されている。第1のダイオードは、インダクタの一方の端子と基準電源線との間に、基準電源線側をアノードとして接続されている。第2のスイッチ手段は、インダクタの他方の端子と基準電源線との間に接続されている。第2のダイオードは、インダクタの他方の端子と出力電源線との間に、インダクタの他方の端子をアノードとして接続されている。
【0013】
電源回路が昇圧動作を実行する際には、電源制御手段により、第1のスイッチ手段がオンされた状態で、第2のスイッチ手段がスイッチング(チョッパ)される。これにより、電源回路は、入力電源線および基準電源線を介して与えられる入力電圧を昇圧して出力電源線および基準電源線を介して出力する昇圧コンバータとして機能する。電源回路が降圧動作を実行する際には、電源制御手段により、第2のスイッチ手段がオフされた状態で、出力電圧検出手段の検出値が降圧値となるように第1のスイッチ手段がスイッチング(チョッパ)される。なお、降圧値は、入力電圧の値よりも低い所定値である。これにより、電源回路は、入力電圧を降圧して出力する降圧コンバータとして機能する。電源回路が非昇降圧動作を実行する際には、第1のスイッチ手段がオンされるとともに、第2のスイッチ手段がオフされる。これにより、電源回路は、入力電圧を昇圧および降圧のいずれもすることなく出力する。なお、このときの出力電圧は、第1のスイッチ手段のオン状態での抵抗およびインダクタの等価直列抵抗による電圧降下分と、第2のダイオードの順方向電圧とを併せた分だけ入力電圧よりも低いものとなる。
【0014】
電源制御手段は、外部から与えられるモード設定指令および出力電圧検出手段の検出値に応じて、電源回路の動作を制御する。具体的には、電源制御手段は、エコモードの設定を指令するモード設定指令が与えられると、降圧動作を実行するように電源回路の動作を制御する。電源回路が降圧動作を実行する場合、出力電圧は通常の電圧値(入力電圧の値にほぼ等しい電圧値)よりも低い降圧値まで降圧される。このため、モータの減速動作時、回生エネルギーにより上昇する出力電圧(コンデンサの端子間電圧)が回生消費電圧値に達するまでにコンデンサに蓄積可能なエネルギー量は、出力電圧を通常の電圧値にした場合(従来の構成)に比べると、通常の電圧値と降圧値との差に応じた量だけ多くなる。すなわち、コンデンサの空き容量を従来の構成に比べて増加させることで、減速動作時にコンデンサにより多くのエネルギーを蓄積することが可能となる。
【0015】
このように、出力電圧を降圧値まで低下させることによって、減速動作時にコンデンサの端子間電圧が回生消費電圧値まで上昇しなければ、回生エネルギーを全て有効利用することができる。また、減速動作時にコンデンサの端子間電圧が回生消費電圧値まで上昇する場合でも、出力電圧を通常の電圧値にした場合に比べると、回生消費回路の動作時間を短くすることができるため、回生消費回路により消費されるエネルギー(無駄になるエネルギー)を低減し、残りの回生エネルギーを有効利用することが可能となる。
【0016】
また、電源制御手段は、トルク重視モードの設定を指令するモード設定指令が与えられると、最初は非昇降圧動作を実行するように電源回路の動作を制御する。さて、モータの加速動作が開始されると、モータにおける電力消費が多くなるため、出力電圧(出力電圧検出手段の検出値)は、定常値(この場合、入力電圧の値)から次第に低下する。そして、モータの加速動作が終了すると、モータにおける電力消費が少なくなるため、出力電圧の低下は収まる。本手段では、このようなモータの動作状態と出力電圧との関係に着目し、以下のように、加速動作期間と、それ以外の期間(非動作期間、等速動作期間、減速動作期間)とにおいて、電源回路の動作状態を切り替える。
【0017】
すなわち、電源制御手段は、非昇降圧動作の実行中、出力電圧検出手段の検出値が入力電圧の値より低い所定の加速開始判定値を下回ると、昇圧動作を実行するように電源回路の動作を制御する。これにより、加速動作が開始されたと考えられる時点から電源回路が昇圧動作を実行する。電源回路が昇圧動作を実行する場合、入力電圧を昇圧した出力電圧が駆動手段に供給される。このため、駆動手段は、比較的高い出力電圧の供給を受けてモータを駆動することができる。従って、電源回路が昇圧動作を実行することで、高いトルクを得るために十分な電力をモータに供給することが可能となる。これにより、例えばモータの高速回転状態のときにおいても高いトルクを出すことが可能になる。
【0018】
このとき、電源回路から出力される出力電圧は、昇圧動作により昇圧されるものの、モータの加速動作に伴う電力消費が多いため、その上昇の傾きは非常に緩やかなものとなる。その後、モータの加速動作が終了すると、モータにおける電力消費が少なくなるため、出力電圧は昇圧動作により急激に上昇する。このようなことを踏まえ、電源制御手段は、昇圧動作の実行中、出力電圧検出手段の検出値が入力電圧の値より高い所定の加速終了判定値を上回ると、非昇降圧動作を実行するように電源回路の動作を制御する。これにより、加速動作が終了されたと考えられる時点から電源回路が再び非昇降圧動作を実行する。
【0019】
上記したように、本手段によれば、エコモードに設定されると、電源制御手段は、出力電圧を通常の電圧値(入力電圧の値にほぼ等しい電圧値)よりも低い降圧値まで降圧するように電源回路の動作を制御する。これにより、出力電圧を通常の電圧値にした場合に比べ、コンデンサの空き容量が増加するので、減速動作時にコンデンサにより多くのエネルギーを蓄積することが可能となる。一方、トルク重視モードに設定されると、電源制御手段は、出力電圧検出手段の検出値に基づいて、モータが加速動作する期間中に出力電圧を昇圧するように電源回路の動作を制御する。これにより、モータの加速動作時に入力電圧を昇圧した出力電圧が駆動手段に供給され、高いトルクを出すことが本来的に必要となる加速動作時において、その高いトルクを得るために十分な電力をモータに供給することが可能となる。また、トルク重視モードに設定された場合であっても、モータが加速動作される期間以外の期間には、出力電圧の昇圧は行われない。そのため、減速動作時におけるコンデンサの空き容量は従来と同等となり、従来に比べて回生エネルギーの回収効率が悪化することはない。
【0020】
このように、本手段によれば、高トルク運転時にモータに対して十分な電力を供給可能とするトルク重視モードと、減速動作時にモータから生じる回生エネルギーを有効利用可能とするエコモードとを選択的に設定することができる。従って、高トルク出力が重視される用途、および電力消費の低減が重視される用途のいずれに対しても、上記モードの設定によって対応することができる。また、トルク重視モードでは、直接的にモータの動作状態を判断することなく、出力電圧の検出値から間接的にモータの動作状態を判断し、その判断結果に基づいて、電源回路の動作状態を上記したように自動的に切り替えるようにしている。そのため、本手段によれば、モータの駆動を制御する駆動制御手段の制御内容を変更することなく、上記した作用および効果を得ることができる。
【0021】
請求項2に記載の手段によれば、モータの異常を検出する異常検出手段を備えている。また、電源回路は、インダクタの一方の端子と出力電源線との間に接続される第3のスイッチ手段を備えている。電源制御手段は、異常検出手段によりモータの異常が検出されると、または、外部から緊急停止を指令する緊急停止指令が与えられると、以下のようにしてモータに対してダイナミックブレーキをかける。すなわち、電源制御手段は、そのときの電源回路の動作状態にかかわらず、第1のスイッチ手段をオフするとともに第2のスイッチ手段をオンし、さらに第3のスイッチ手段をオンする。これにより、モータの相間が第3のスイッチ手段、インダクタおよび第2のスイッチ手段を介して短絡された状態になる。また、一般に、スイッチ手段はオンの状態であっても抵抗値がゼロであることはなく、所定の抵抗(オン抵抗)を有しており、インダクタは所定の等価直列抵抗を有している。
【0022】
すなわち、モータの相間が所定の抵抗を介して短絡された状態になり、モータに対してダイナミックブレーキがかけられた状態となる。通常、ダイナミックブレーキをかけるためには、出力電源線および基準電源線間に、ダイナミックブレーキ専用のスイッチ手段および抵抗を直列に設ける必要がある。本手段によれば、電源回路の各スイッチ手段およびインダクタを用いて、ダイナミックブレーキをかけることが可能となるため、ダイナミックブレーキ専用のスイッチ手段および抵抗を設ける必要がなくなり、その分だけ回路構成を簡単化し、コスト低減を図ることが可能となる。
【図面の簡単な説明】
【0023】
【図1】本発明の一実施形態を示すロボットシステムの電気構成図
【図2】ロボットシステムの構成を概略的に示す図
【図3】回生消費回路の動作制御の内容を示すフローチャート
【図4】一連の動作を行う際の回転速度およびバス電圧を示す図
【図5】モータ制御の内容を等価的に示すブロック図
【図6】初期制御の内容を示すフローチャート
【図7】エコモード設定時の電源制御部の制御内容を示すフローチャート
【図8】エコモード設定時の回転速度、バス電圧および各スイッチの状態を示す図
【図9】トルク重視モード設定時の図7相当図
【図10】トルク重視モード設定時の図8相当図
【図11】ダイナミックブレーキ制御が実行される際の図8相当図
【発明を実施するための形態】
【0024】
以下、本発明の一実施形態について図面を参照しながら説明する。
図2は、一般的な産業用ロボットのシステム構成を示している。図2に示すロボットシステム1は、ロボット2と、ロボット2を制御するコントローラ3と、コントローラ3に接続されたティーチングペンダント4とから構成されている。
【0025】
ロボット2は、例えば6軸の垂直多関節型ロボットとして構成されている。ロボット2は、ベース5と、ベース5に水平方向に回転可能に支持されたショルダ部6と、ショルダ部6に上下方向に回転可能に支持された下アーム7と、下アーム7に上下方向に回転可能に支持された第1の上アーム8と、第1の上アーム8に捻り回転可能に支持された第2の上アーム9と、第2の上アーム9に上下方向に回転可能に支持された手首10と、手首10に捻り回転可能に支持されたフランジ11とから構成されている。
【0026】
ベース5、ショルダ部6、下アーム7、第1の上アーム8、第2の上アーム9、手首10およびフランジ11は、ロボット2のアームとして機能し、アーム先端であるフランジ11には、図示はしないが、エンドエフェクタ(手先)が取り付けられる。ベース5、ショルダ部6、下アーム7、第1の上アーム8、第2の上アーム9、手首10およびフランジ11は、ロボット2のアームとして機能する。ロボット2の各アーム(複数の軸)はそれぞれに対応して設けられるモータ(図1に符号Mを付して示す)により駆動される。各モータの近傍には、それぞれの回転軸の回転位置を検出するための位置検出器(図示せず)が設けられている。
【0027】
ティーチングペンダント4は、例えば使用者が携帯あるいは手に所持して操作可能な程度の大きさで、例えば薄型の略矩形箱状に形成されている。ティーチングペンダント4には、各種のキースイッチ12が設けられており、使用者は、キースイッチ12により種々の入力操作を行う。ティーチングペンダント4は、ケーブルを経由してコントローラ3に接続され、通信インターフェイスを経由してコントローラ3との間で高速のデータ転送を実行するようになっており、キースイッチ12の操作により入力された操作信号等の情報はティーチングペンダント4からコントローラ3へ送信される。
【0028】
図1は、ロボットシステムの電気構成を概略的に示すブロック図である。ロボット2には、各軸をそれぞれ駆動するための複数のモータM(図1では1つのみ示す)が設けられている。モータMは例えばブラシレスDCモータである。コントローラ3には、交流電源20より供給される交流を整流および平滑して出力する直流電源回路21、回生消費回路22、モータMを駆動するインバータ装置23、電流検出部24、位置検出部25、直流電源回路21の動作を制御する電源制御部26およびこれら各装置の制御などを行うメイン制御部27が設けられている。
【0029】
直流電源回路21は、整流回路28、昇降圧回路29および平滑用のコンデンサ30から構成されている。整流回路28は、ダイオードをブリッジの形態に接続してなる周知構成のものである。整流回路28の交流入力端子には、例えば3相200Vの交流電源20の各相出力が与えられる。整流回路28の直流出力端子は、それぞれ入力電源線31および基準電源線32に接続されている。
【0030】
昇降圧回路29(電源回路に相当)は、トランジスタQ1、Q2、インダクタL1、ダイオードD1、D2およびスイッチSW1を備えている。トランジスタQ1(第1のスイッチ手段に相当)は、Nチャネル型のパワーMOSFETであり、そのドレインは入力電源線31に接続され、そのソースはインダクタL1の一方の端子に接続されている。ダイオードD1(第1のダイオードに相当)は、インダクタL1の一方の端子と基準電源線32との間に、基準電源線32側をアノードとして接続されている。トランジスタQ2(第2のスイッチ手段に相当)は、Nチャネル型のパワーMOSFETであり、そのドレインはインダクタL1の他方の端子に接続され、そのソースは基準電源線32に接続されている。
【0031】
ダイオードD2(第2のダイオードに相当)は、インダクタL1の他方の端子と出力電源線33との間に、インダクタL1の他方の端子側をアノードとして接続されている。スイッチSW1(第3のスイッチ手段に相当)は、例えばリレーなどの機械式のスイッチであり、インダクタL1の一方の端子と出力電源線33との間に接続されている。なお、スイッチSW1は、例えばパワーMOSFETやバイポーラトランジスタなど、半導体スイッチング素子により構成してもよい。出力電源線33および基準電源線32の間には、コンデンサ30が接続されている。
【0032】
昇降圧回路29は、昇圧動作、降圧動作および非昇降圧動作のうち、いずれかの動作を実行するようになっている。昇圧動作は、入力電源線31および基準電源線32を介して与えられる入力電圧(整流回路28から出力される直流電圧)を昇圧して出力電源線33および基準電源線32を介して出力するものである。降圧動作は、入力電圧を降圧して出力電源線33および基準電源線32を介して出力するものである。非昇降圧動作は、入力電圧を昇圧および降圧のいずれもすることなく出力電源線33および基準電源線32を介して出力するものである。
【0033】
昇降圧回路29による上記各動作は、トランジスタQ1、Q2の駆動状態およびスイッチSW1の開閉状態に応じて切り替えられる。トランジスタQ1、Q2の駆動およびスイッチSW1の開閉は、電源制御部26により制御される。すなわち、本実施形態では、電源制御部26が、昇降圧回路29の動作を制御する電源制御手段に相当する。
【0034】
電源制御部26は、CPU、ROM、RAM、I/Oなどを備えたマイクロコンピュータを主体として構成されている。電源制御部26は、出力電源線33および基準電源線32間のバス電圧BV(出力電圧)の値を検出する出力電圧検出手段としての機能を備えている。このような機能を備えた電源制御部26は、メイン制御部27から与えられる指令信号およびバス電圧BVの検出値に応じて、昇降圧回路29の動作を制御する。
【0035】
電源制御部26は、昇圧動作を実行する場合、スイッチSW1をオフするとともにトランジスタQ1をオンした状態で、バス電圧BVの検出値が昇圧値BVHとなるようにトランジスタQ2をスイッチング(チョッパ)する。なお、昇圧値BVHは、入力電圧の値(例えば、約282V)よりも高い所定値とする。これにより、昇降圧回路29は、入力電圧を昇圧して出力する昇圧コンバータとして機能する。ただし、昇降圧回路29が上記昇圧動作を実行している期間であっても、後述するモータMの加速動作期間では、バス電圧BVは昇圧値BVHより低くなる。
【0036】
電源制御部26は、降圧動作を実行する場合、スイッチSW1およびトランジスタQ2をオフした状態で、バス電圧BVの検出値が降圧値BVLとなるようにトランジスタQ1をスイッチング(チョッパ)する。なお、降圧値BVLは、入力電圧の値よりも低く、且つモータMを駆動するために最低限必要な電圧値であればよく、直流電源回路21、モータM、インバータ装置23などの仕様に応じて適宜変更すればよい。これにより、昇降圧回路29は、入力電圧を降圧して出力する降圧コンバータとして機能する。ただし、昇降圧回路29が上記降圧動作を実行している期間であっても、後述する回生エネルギーが生じる期間では、バス電圧BVは降圧値BVLより上昇する。
【0037】
電源制御部26は、非昇降圧動作の実行をする場合、スイッチSW1およびトランジスタQ2をオフするとともにトランジスタQ1をオンする。これにより、昇降圧回路29は、入力電圧を昇圧および降圧のいずれもすることなく出力する。このときの出力電圧(バス電圧BV)は、トランジスタQ1のオン抵抗(オン状態での抵抗)およびインダクタL1の等価直列抵抗による電圧降下分と、ダイオードD2の順方向電圧とを合わせた分だけ入力電圧よりも低い値である通常値BVMとなる。
【0038】
回生消費回路22は、出力電源線33および基準電源線32間に回生抵抗R1およびトランジスタQ3(回生スイッチ手段に相当)の直列回路を接続して構成されている。トランジスタQ3は、Nチャネル型のパワーMOSFETであり、そのオン、オフは、電源制御部26により制御される。すなわち、本実施形態において、電源制御部26は、回生消費回路22の動作を制御する回生制御手段に相当する。
【0039】
図3は、電源制御部26による回生消費回路22の動作制御の内容を示している。なお、電源制御部26は、図3に示す制御を所定周期毎に実行するようになっている。まず、電源制御部26は、その時点におけるバス電圧BV(の検出値)を参照する(ステップA1)。続いて、電源制御部26は、参照したバス電圧BVが回生消費電圧値BVR以上であるか否かを判断する(ステップA2)。バス電圧BVが回生消費電圧値BVR以上である場合(YES)には、トランジスタQ3をオン駆動し(ステップA3)、制御を終了する。一方、バス電圧BVが回生消費電圧値BVR未満である場合(NO)には、トランジスタQ3をオフ駆動し(ステップA4)、制御を終了する。なお、ステップA3またはA4において、既にトランジスタQ3がオンまたはオフされている場合には、その状態を維持したまま制御を終了する。
【0040】
図4は、ロボットが加速、等速、減速という一連の動作を行う際におけるモータMの回転速度とバス電圧とを示している。図4に示すように、減速動作時にはモータMから回生されるエネルギー(回生エネルギー)に起因してバス電圧BVが上昇する。そして、バス電圧BVが回生消費電圧値BVRを超えようとすると、回生抵抗R1に電流が流れることで回生エネルギーが熱エネルギーとして放出され、バス電圧BVが回生消費電圧値BVR未満となるようにその電圧上昇が抑えられる。
【0041】
回生消費電圧値BVRは、出力電源線33および基準電源線32に接続される各回路素子(インバータ装置23のスイッチング素子、直流電源回路21のコンデンサ30など)の定格を超えてバス電圧BVが上昇しないような値に設定すればよい。また、回生消費電圧値BVR、昇圧値BVH、通常値BVMおよび降圧値BVLは、下記(1)式の関係を満たすように設定すればよい。
BVR>BVH>BVM>BVL …(1)
【0042】
なお、回生スイッチ手段としてのトランジスタQ3は、パワーMOSFETに限らずともよく、例えばバイポーラトランジスタなどの他の半導体スイッチング素子により構成してもよい。また、回生スイッチ手段としては、例えばリレーなどの機械式のスイッチで構成してもよい。
【0043】
インバータ装置23(駆動手段に相当)は、出力電源線33および基準電源線32間に6つのスイッチング素子例えばIGBT(図1には2つのみ示す)を三相フルブリッジ接続して構成されたインバータ主回路と、その駆動回路とを6組備えている(図1には1組のみ示す)。IGBTのコレクタ・エミッタ間には還流ダイオードが接続されている。また、IGBTのゲートには、駆動回路からゲート信号が与えられている。駆動回路は、メイン制御部27から与えられる指令信号(通電指令Sc)に基づいてパルス幅変調されたゲート信号(PWM信号)を出力して各IGBTを駆動する。
【0044】
メイン制御部27(駆動制御手段に相当)は、CPU、ROM、RAM、I/Oなどを備えたマイクロコンピュータを主体として構成されている。電流検出部24は、モータMに流れる電流を検出する電流検出器(図示せず)からの検出信号をメイン制御部27に入力可能なデータに変換して出力する。位置検出部25は、モータMの回転位置を検出する位置検出器(図示せず)からの検出信号をメイン制御部27に入力可能なデータに変換して出力する。メイン制御部27は、電流検出部24から出力されるデータを元にモータMに流れる電流の値を取得するとともに、位置検出部25から出力されるデータを元にモータMの回転位置および回転速度を取得する。詳細は後述するが、メイン制御部27は、このようにして取得した電流値、回転位置および回転速度を用いてインバータ装置23によるモータMの駆動をフィードバック制御する。また、メイン制御部27は、電源制御部26に対し、各種の指令信号を出力する。
【0045】
図5は、ロボットシステム1におけるモータ制御の内容を等価的に示したブロック図である。図5に示すように、メイン制御部27は、位置制御部41、速度制御部42および電流制御部43を備えている。なお、図5では、1つのモータMの制御に係る構成のみを示しているが、実際には全てのモータMのそれぞれに対応して同様の構成が設けられている。さて、一般に産業用のロボットは、予めティーチングなどを実施することにより作成される所定の動作プログラムに従って動作するようになっている。図示しない上位制御部は、その動作プログラムを解釈し、ロボット2に動作プログラムに従った動作を行わせるように各モータMを制御するための指令値(位置指令pref)を位置制御部41に出力する。
【0046】
位置制御部41は、上位制御部から与えられる位置指令prefに対する現在の回転位置p*の偏差を求める減算器45と、減算器45の出力(偏差)をゼロに近づけるように速度指令vref(回転速度指令に相当)を出力する位置制御アンプ46とから構成されている。位置制御アンプ46のゲインはKpとなっている。速度制御部42は、微分器47、減算器48および速度制御アンプ49により構成されている。微分器47は、現在の回転位置p*を微分して現在の回転速度v*に変換する。減算器48は、速度指令vrefに対する現在の回転速度v*の偏差を求める。速度制御アンプ49は、減算器48の出力(偏差)をゼロに近づけるように電流指令irefを出力する。速度制御アンプ49のゲインはKvとなっている。
【0047】
電流制御部43は、電流指令irefに対する現在のモータMに流れる電流i*の偏差を求める減算器50と、減算器50の出力(偏差)をゼロに近づけるようにインバータ装置23に対する指令信号(通電指令Sc)を出力する電流制御アンプ51とから構成されている。電流制御アンプ51のゲインはKiとなっている。このような構成により、メイン制御部27は、電流フィードバック制御、速度フィードバック制御および位置フィードバック制御を行い、モータMの駆動をフィードバック制御してロボット2のアームの動作制御を行う。
【0048】
さて、電源制御部26は、昇降圧回路29の動作制御に関する2つの制御モード(トルク重視モードおよびエコモード)を有している。電源制御部26は、メイン制御部27から与えられる指令信号の一つであるモード選択フラグfmの状態に応じて、上記各制御モードのうち、いずれかの制御モードに設定される。本実施形態において、モード選択フラグfmは、例えばユーザがティーチングペンダント4のキースイッチ12を操作することでコントローラ3に与えられる動作指令に応じて設定されるようになっている。なお、モード選択フラグfmは、図示しない上位の制御機器とコントローラ3との通信により設定されるものでもよい。また、モード選択フラグfmは、例えば1ビットとしている。
【0049】
モード選択フラグが「0」である場合、電源制御部26はエコモードに設定される。電源制御部26は、エコモードに設定されると、モータMの動作状態にかかわらず、降圧動作を実行するように昇降圧回路29の動作を制御する。モード選択フラグfmが「1」である場合、電源制御部26はトルク重視モードに設定される。電源制御部26は、トルク重視モードに設定されると、モータMの動作状態に応じて昇降圧回路29の動作状態を自動的に切り替える。すなわち、電源制御部26は、トルク重視モードに設定されると、バス電圧BVの検出値に基づいてモータMが加速動作状態であると判断される期間には昇圧動作を実行し、その期間を除く期間には非昇降圧動作を実行するように昇降圧回路29の動作を制御する(詳細は後述する)。
【0050】
また、電源制御部26は、モータMに対するダイナミックブレーキをかけるように昇降圧回路29の動作を制御する機能(ダイナミックブレーキ制御)を有している。外部よりモータMの緊急停止を指令する緊急停止指令が与えられると、メイン制御部27から電源制御部26に対し、ダイナミックブレーキをオンする旨を示す指令が与えられる。これを受けて、電源制御部26は、以下のように昇降圧回路29の動作を制御する。すなわち、電源制御部26は、そのときに設定されている制御モードにかかわらず、トランジスタQ1をオフ駆動するとともに、トランジスタQ2をオン駆動し、さらにスイッチSW1をオンする。
【0051】
詳細は後述するが、このような制御により、モータMに対してダイナミックブレーキがかけられる。なお、コントローラ3がモータMの異常を検出する異常検出手段(図示せず)を備えた構成である場合には、その異常検出手段によりモータMの異常が検出されると、メイン制御部27から電源制御部26に対して上記指令が与えられて、上記した制御を実行してモータMに対するダイナミックブレーキをかけるように構成してもよい。
【0052】
次に、本実施形態の作用および効果について説明する。
コントローラ3に電源が投入されると、電源制御部26は、図6に示す内容の初期制御を実行する。まず、ステップS1において、トランジスタQ1、Q2をオフ駆動するとともに、スイッチSW1をオフする初期設定が実行される。従って、この段階では、昇降圧回路29には、入力電圧が未だ供給されていない(電源遮断状態)。続いて、ステップS2において、モード選択フラグfmが参照される。そして、モード選択フラグfmが「0」であればエコモードに設定され(ステップS3)、「1」であればトルク重視モードに設定される。
【0053】
電源制御部26は、上記初期制御において設定された制御モードに応じて昇降圧回路29の動作を以下のように制御する。なお、電源制御部26は、以下のように昇降圧回路29の動作制御を行う際、図3に示した回生消費回路22の動作制御についても所定の周期毎に実行している。
【0054】
電源制御部26は、初期制御においてエコモードに設定されると、降圧動作を実行するように昇降圧回路29の動作を制御する。図7は、エコモードに設定された場合の電源制御部26の制御内容を示すフローチャートである。また、図8は、エコモードに設定された場合におけるモータMの回転速度、バス電圧、トランジスタQ1、Q2の駆動状態およびスイッチSW1の開閉状態を示している。エコモードに設定されると、トランジスタQ1がオン駆動される(図7のステップT1、図8の時刻ta)。これにより、昇降圧回路29から出力されるバス電圧BVは、通常値BVMに向けて上昇する。なお、トランジスタQ1がオンされた瞬間、交流電源20から直流電源回路21に対して突入電流が流れるが、その突入電流はトランジスタQ1のオン抵抗およびインダクタL1の等価直列抵抗により制限される。
【0055】
その後、所定時間が経過すると(図7のステップT2で「YES」)、その時点(図8の時刻tb)以降、バス電圧BVの検出値が降圧値BVLとなるようにトランジスタQ1がスイッチングされる(ステップT3)。これにより、昇降圧回路29から出力されるバス電圧BVが通常値BVMから降圧値BVLまで降圧される。そして、バス電圧BVが降圧値BVLに達した時点以降において、バス電圧BVの供給を受けたインバータ装置23によりモータMが駆動され、一連の動作が行われる。
【0056】
上記したようにエコモードに設定された場合、バス電圧BVは通常値BVMよりも低い降圧値BVLまで降圧される。そのため、モータMの減速動作時、回生エネルギーにより上昇するバス電圧BV(コンデンサ30の端子間電圧)が回生消費電圧値BVRに達するまでにコンデンサ30に蓄積可能なエネルギー量は、バス電圧BVが通常値BVMである場合(従来構成の場合)に比べると、下記(2)式に示すエネルギー量JCだけ多くなる。
JC={(1/2)・C・BVM2}−{(1/2)・C・BVL2}
=(1/2)・C・(BVM2−BVL2) …(2)
【0057】
上記(2)式に示すように、コンデンサ30に蓄積可能なエネルギー量は、通常値BVMと降圧値BVLとの差に応じた量JCだけ多くなる。すなわち、コンデンサ30の空き容量を従来構成の場合に比べて増加させることで、減速動作時にコンデンサ30に一層多くのエネルギーを蓄積することが可能になる。
【0058】
このように、バス電圧BVを降圧値BVLまで低下させることによって、減速動作時にコンデンサ30の端子間電圧が回生消費電圧値BVRまで上昇しなければ、回生エネルギーを全て有効利用することができる。また、減速動作時にコンデンサ30の端子間電圧が回生消費電圧値BVRまで上昇する場合でも、バス電圧BVが通常値BVMである従来構成の場合と比べると、回生消費回路22の動作時間を短くすることができるため、回生消費回路22により消費されるエネルギー(無駄になるエネルギー)を低減し、残りの回生エネルギーを有効利用することが可能となる。従って、回生エネルギーの回収を重視する用途においては、常にエコモードに設定することで、上記効果を確実に得ることが可能となる。
【0059】
電源制御部26は、初期制御においてトルク重視モードに設定されると、図9に示す内容の電源自動切替制御を実行する。また、図10は、トルク重視モードに設定された場合における図8相当図である。この制御において、電源制御部26は、バス電圧BVの検出値に基づいてモータMが加速動作される期間を間接的に判断する。なお、ここでは全てのモータMの加速動作期間が互いに概ね一致するという前提が成立するものとしている。このような前提が成立しない場合には、全てのモータMのうち、最も高い加速度で動作するモータMの加速動作期間を判断すればよい。
【0060】
トルク重視モードに設定されると、トランジスタQ1がオン駆動される(図9のステップU1、図10の時刻ta)。これにより、昇降圧回路29から出力されるバス電圧BVは、通常値BVMに向けて上昇する。さて、モータMの加速動作が開始されると、モータMにおける電力消費が多くなるため、バス電圧BVは、通常値BVMから次第に低下する。その後、モータMの加速動作が終了すると、通常は等速動作に移行するため、モータMにおける電力消費が少なくなり、バス電圧BVの低下が収まる。本実施形態では、このようなモータMの動作状態とバス電圧BVとの関係に着目し、次のように、バス電圧BVの検出値に基づいてモータMの加速動作期間を判断する。
【0061】
すなわち、ステップU2では、バス電圧BVの検出値が加速開始判定値VAS未満であるか否かが判断される。なお、ステップU2では、バス電圧BVがノイズなどの影響により変動した際に誤判断してしまう事態を防止するため、バス電圧BVの検出値が所定回数(または所定時間)連続して加速開始判定値VAS未満である場合に「YES」と判断する。
【0062】
加速開始判定値VASは、通常値BVMより低い値であれば適宜変更可能である。なお、加速開始判定値VASを高く設定するほど、実際に加速動作が開始された時点(図10の時刻tb)からステップU2で「YES」と判断される時点(図10の時刻tc)までの遅延時間Tdが短くなる。つまり、加速開始判定値VASを高く設定するほど、モータMの加速動作開始時点の判定精度が高まる。ただし、この場合、ノイズなどにより誤判断する可能性が高まる。これに対し、加速開始判定値VASを低く設定するほど、上記遅延時間が長くなる。つまり、加速開始判定値VASを低く設定するほど、モータMの加速動作開始時点の判定精度が低くなる。ただし、この場合、ノイズなどにより誤判断する可能性が低くなる。
【0063】
バス電圧BVの検出値が加速開始判定値VAS未満であると判断されると(ステップU2で「YES」、図10の時刻tc)、ステップU3に進む。ステップU3では、バス電圧BVの検出値が昇圧値BVHとなるようにトランジスタQ2がスイッチングされる。これにより、昇降圧回路29から出力されるバス電圧BVが通常値BVMから昇圧値BVHに向けて昇圧される。そのため、インバータ装置23は、整流回路28から出力される電圧がそのままインバータ装置に供給されていた従来の構成に対し、比較的高いバス電圧BVの供給を受けてモータMを駆動することになる。従って、トルク重視モードに設定された場合、インバータ装置23は、加速動作期間において、高いトルクを得るために十分な電力をモータMに供給することができる。これにより、例えばモータMの高速回転状態のときにおいても高いトルクを出すことが可能になる。
【0064】
このとき、昇降圧回路29から出力されるバス電圧BVは、昇圧動作により昇圧されるものの、モータMの加速動作に伴う電力消費の増加により、その上昇の傾きは非常に緩やかなものとなる(図10の時刻tc〜td)。そのため、モータMの加速動作期間において、バス電圧BVが昇圧値BVHまで上昇することはない。逆に言えば、昇圧値BVHは、装置の仕様を考慮した上で、このような条件を満たす値に設定しておくことが必要である。
【0065】
その後、モータMの加速動作が終了すると、等速動作に移行するため、モータMにおける電力消費が少なくなる(図10の時刻td)。これにより、バス電圧BVは、昇圧動作により急激に上昇する。そこで、ステップU4では、バス電圧BVの検出値が昇圧値BVHに達したか否かが判断される。本実施形態では、昇圧値BVHが加速動作の終了時点を判定する加速終了判定値に相当する。バス電圧BVの検出値が昇圧値VHに達したと判断されると(ステップU4で「YES」、図10の時刻te)、ステップU5に進む。ステップU5では、トランジスタQ2がオフ駆動される。これにより、昇降圧回路29が非昇降圧動作を実行することになり、バス電圧BVは、通常値BVMに向けて低下する。
【0066】
ステップU5の実行後は、ステップU2に戻り、次の加速動作が開始されると判断されるまでの間(ステップU2で「NO」の間)、非昇降圧動作が継続される。そのため、非昇降圧動作を実行する昇降圧回路29から出力されるバス電圧BVの供給を受けたインバータ装置23によりモータMが駆動され、等速動作および減速動作が行われる。
【0067】
以上説明したように、電源制御部26は、エコモードに設定されると、バス電圧BVを通常値BVMよりも低い降圧値BVLまで降圧する降圧動作を実行するように昇降圧回路29の動作を制御する。これにより、バス電圧BVを通常値BVMにした場合(従来の構成)に比べ、コンデンサ30に蓄積可能なエネルギー量が、上記(2)式に示した量だけ多くなる。すなわち、従来構成の場合に比べ、コンデンサ30の空き容量が増加するので、モータMの減速動作時にコンデンサ30に一層多くのエネルギーを静電エネルギーとして蓄積することが可能となる。
【0068】
また、電源制御部26は、トルク重視モードに設定されると、バス電圧BVの検出値に基づいて、モータMが加速動作を開始したと考えられる時点(実際の加速開始から所定の遅延時間経過後の時点)から加速動作を終了したと考えられる時点(実際の加速終了から所定の遅延時間経過後の時点)までの期間中、バス電圧BVを昇圧する昇圧動作を実行するように昇降圧回路29の動作を制御する。これにより、モータMの加速動作時に昇圧されたバス電圧BVがインバータ装置23に供給され、高いトルクを出すことが本来的に必要となる加速動作時において、その高いトルクを得るために十分な電力をモータMに供給することが可能となる。トルク重視モードに設定された場合であっても、モータMが加速動作されると考えられる期間を除く期間には、バス電圧BVの昇圧は行われない。そのため、減速動作時におけるコンデンサ30の空き容量は従来と同等となり、従来に比べて回生エネルギーの回収効率が悪化することはない。
【0069】
このように、本実施形態によれば、高トルク運転時(加速動作時)にモータMに対して十分な電力を供給可能とするトルク重視モードと、減速動作時にモータMから生じる回生エネルギーを積極的に有効利用可能とするエコモードとを選択的に設定することが可能となっている。従って、高トルク出力が重視される用途および電力消費の低減が重視される用途のいずれに対しても、上記モードの設定によって対応することができる。また、トルク重視モードでは、直接的にモータMの動作状態を判断することなく、バス電圧BVの検出値から間接的にモータMの動作状態(加速動作状態)を判断し、その判断結果に基づいて、昇降圧回路29の動作状態を上記したように自動的に切り替えるようにしている。そのため、電源制御部26の制御内容を単純化することができる。また、モータMの駆動を制御するメイン制御部27の制御内容を変更することなく、上記した作用および効果を得ることができる。
【0070】
一般に、電源に関する制御を行う電源制御部26と、モータMの駆動に関する制御を行うメイン制御部27とは、互いに異なる担当者(担当グループ)により開発される。本実施形態によれば、メイン制御部27の制御内容を変更することなく電源制御部26の制御内容を変更すればよいため、従来構成からの制御(ソフトウエア)に関する改良部分が少なくなる。したがって、ソフトウエア開発が容易になり、その開発コストを抑えることができるという効果が得られる。
【0071】
また、電源回路には、電源投入時における突入電流を制限するため、電源の入力ラインに直列に介在するように突入電流制限用の抵抗が設けられるとともに、その抵抗の端子間を短絡するスイッチ手段(例えば機械式のリレーなど)が設けられることが一般的である。これに対し、本実施形態によれば、昇降圧回路29が昇降圧動作を実行するために本来的に必要となる構成(トランジスタQ1、インダクタL1)により突入電流が制限される。このため、突入電流制限用の抵抗およびスイッチ手段を設ける必要がなくなり、その分だけ回路構成を簡単化し、製造コストの低減を図ることができる。
【0072】
さらに、電源回路には、電源供給を遮断可能にするため、交流電源から直流電源回路に対する電源供給経路に直列に介在するように電磁接触器(コンタクタ)などが設けられることが一般的である。本実施形態では、昇降圧回路29に対する入力電圧の供給を遮断する電源遮断状態に設定することができるため、その電磁接触器を省略することが可能である。電磁接触器などが省略されれば、その分だけ回路構成を簡単化し、製造コストの低減を図ることができる。
【0073】
続いて、電源制御部26によるダイナミックブレーキ制御について説明する。図11は、ダイナミックブレーキ制御が実行される場合におけるモータMの回転速度、バス電圧、トランジスタQ1、Q2の駆動状態、スイッチSW1の開閉状態を示している。なお、ここでは、電源制御部26がエコモードに設定された場合におけるダイナミックブレーキ制御について説明するが、ダイナミックブレーキ制御は、電源制御部26が他の制御モード(トルク重視モード)に設定された場合であっても同様に実行される。
【0074】
電源制御部26は、図11の時刻taの時点において緊急停止指令が与えられると、そのときに設定されている制御モードにかかわらず、トランジスタQ1をオフ駆動するとともに、トランジスタQ2をオン駆動し、さらにスイッチSW1をオンする。これにより、モータMの相間がスイッチSW1、インダクタL1、トランジスタQ2を介して短絡された状態になる。
【0075】
スイッチSW1は、オン状態であっても所定の抵抗値を有している。また、インダクタL1は、所定の等価直列抵抗を有している。さらに、パワーMOSFETであるトランジスタQ2は、所定のオン抵抗を有している。このようなことから、モータMの相間が、スイッチSW1のオン時の抵抗、インダクタL1の等価直列抵抗およびトランジスタQ2のオン抵抗を介して短絡され、モータMに対してダイナミックブレーキがかけられる。これにより、モータMは、その回転速度が急激に低下し、図11の時刻tbの時点において停止する。また、この際、トランジスタQ1がオフされているため、バス電圧BVも回転速度と同様に急激に低下し、時刻tbの時点においてゼロになる。
【0076】
通常、ダイナミックブレーキをかけるためには、バス電圧BVを供給する電源線間(出力電源線33および基準電源線32間)に、ダイナミックブレーキ専用のスイッチ手段および抵抗を直列に設ける必要がある。これに対し、本実施形態によれば、電源制御部26が上記したダイナミックブレーキ制御を行うことにより、昇降圧回路29のスイッチSW1、インダクタL1およびトランジスタQ2を用いて、ダイナミックブレーキをかけることが可能となる。このため、ダイナミックブレーキ専用のスイッチ手段および抵抗を設ける必要がなくなり、その分だけ回路構成を簡単化し、製造コストの低減を図ることができる。
【0077】
なお、本発明は上記し且つ図面に記載した実施形態に限定されるものではなく、次のような変形または拡張が可能である。
電源制御部26によるダイナミックブレーキ制御については、必要に応じて設ければよい。ダイナミックブレーキ制御を設けない場合、スイッチSW1を省略できる。
電源制御部26は、非昇降圧動作を実行する場合、トランジスタQ1およびスイッチSW1をオンするとともに、トランジスタQ2をオフするように構成してもよい。このようにすれば、非昇降圧動作時における出力電圧(バス電圧BV)が、スイッチSW1のオン時の抵抗による電圧降下分だけ入力電圧より低い値になる。そして、インダクタL1、ダイオードD2による電力損失を低減するという効果が得られる。
【0078】
本発明は、モータMとしてDCブラシレスモータを用いた構成に限らず、例えば直流モータ、交流モータなど各種のモータを用いた構成にも適用可能である。なお、モータMとして直流モータを用いる場合には、モータMを駆動する駆動手段として、インバータ装置23に代えて、例えばHブリッジ回路を主体として構成された駆動回路を用いればよい。
上記実施形態では、本発明を6軸の垂直多関節型のロボット2に適用した例を説明したが、本発明は、各軸をモータにより駆動する構成のロボット全般に適用可能である。
【符号の説明】
【0079】
図面中、1はロボットシステム、2はロボット、22は回生消費回路、23はインバータ装置(駆動手段)、26は電源制御部(出力電圧検出手段、回生制御手段、電源制御手段)、27はメイン制御部(駆動制御手段)、29は昇降圧回路(電源回路)、30はコンデンサ、31は入力電源線、32は基準電源線、33は出力電源線、D1は第1のダイオード、D2は第2のダイオード、L1はインダクタ、Mはモータ、Q1はトランジスタ(第1のスイッチ手段)、Q2はトランジスタ(第2のスイッチ手段)、Q3はトランジスタ(回生スイッチ手段)、R1は回生抵抗、SW1はスイッチ(第3のスイッチ手段)を示す。
【特許請求の範囲】
【請求項1】
ロボットの各軸を駆動するためのモータと、
入力電源線および基準電源線を介して与えられる入力電圧を昇圧して出力電源線および前記基準電源線を介して出力する昇圧動作と、前記入力電圧を降圧して前記出力電源線および前記基準電源線を介して出力する降圧動作と、前記入力電圧を昇圧および降圧のいずれもすることなく前記出力電源線および前記基準電源線を介して出力する非昇降圧動作とを選択的に実行する電源回路と、
前記出力電源線および前記基準電源線間に接続されたコンデンサと、
前記出力電源線および前記基準電源線を介して与えられる出力電圧の供給を受けて動作し、前記モータを駆動する駆動手段と、
前記モータの回転速度を回転速度指令に一致させるように前記駆動手段による前記モータの駆動を制御する駆動制御手段と、
前記出力電圧を検出する出力電圧検出手段と、
前記出力電源線および前記基準電源線の間に直列に設けられた回生スイッチ手段および回生抵抗からなる回生消費回路と、
前記出力電圧検出手段の検出値が回生消費電圧値未満のときにあっては前記回生スイッチ手段をオフし、当該検出値が回生消費電圧値以上のときにあっては前記回生スイッチ手段をオンする回生制御手段と、
外部から与えられるモード設定指令および前記出力電圧検出手段の検出値に応じて、前記電源回路の動作を制御する電源制御手段と、を備え、
前記電源回路は、
インダクタ、前記入力電源線と前記インダクタの一方の端子との間に接続される第1のスイッチ手段、前記インダクタの一方の端子と前記基準電源線との間に前記基準電源線側をアノードとして接続される第1のダイオード、前記インダクタの他方の端子と前記基準電源線との間に接続される第2のスイッチ手段、および前記インダクタの他方の端子と前記出力電源線との間に前記インダクタの他方の端子側をアノードとして接続される第2のダイオードを備え、
前記第1のスイッチ手段がオンされた状態で前記第2のスイッチ手段がスイッチングされることにより、前記昇圧動作が実行され、
前記第2のスイッチ手段がオフされた状態で、前記出力電圧検出手段の検出値が前記入力電圧の値より低い所定の降圧値となるように前記第1のスイッチ手段がスイッチングされることにより、前記降圧動作が実行され、
前記第1のスイッチ手段がオンされるとともに、前記第2のスイッチ手段がオフされることにより、前記非昇降圧動作が実行され、
前記電源制御手段は、
エコモードの設定を指令する前記モード設定指令が与えられると、
前記降圧動作を実行するように前記電源回路の動作を制御し、
トルク重視モードの設定を指令する前記モード設定指令が与えられると、
最初に前記非昇降圧動作を実行するように前記電源回路の動作を制御し、
前記非昇降圧動作の実行中、前記出力電圧検出手段の検出値が前記入力電圧の値より低い所定の加速開始判定値を下回ると、前記昇圧動作を実行するように前記電源回路の動作を制御し、
前記昇圧動作の実行中、前記出力電圧検出手段の検出値が前記入力電圧の値より高い所定の加速終了判定値を上回ると、前記非昇降圧動作を実行するように前記電源回路の動作を制御することを特徴とするロボットシステム。
【請求項2】
前記モータの異常を検出する異常検出手段を備え、
前記電源回路は、前記インダクタの一方の端子と前記出力電源線との間に接続される第3のスイッチ手段を備え、
前記異常検出手段により前記モータの異常が検出されると、または、外部から緊急停止を指令する緊急停止指令が与えられると、前記電源回路の動作状態にかかわらず前記第1のスイッチ手段をオフするとともに前記第2のスイッチ手段をオンし、さらに前記第3のスイッチ手段をオンすることにより、前記モータの相間を、前記第3のスイッチ手段、前記インダクタおよび前記第2のスイッチ手段を介して短絡することを特徴とする請求項1に記載のロボットシステム。
【請求項1】
ロボットの各軸を駆動するためのモータと、
入力電源線および基準電源線を介して与えられる入力電圧を昇圧して出力電源線および前記基準電源線を介して出力する昇圧動作と、前記入力電圧を降圧して前記出力電源線および前記基準電源線を介して出力する降圧動作と、前記入力電圧を昇圧および降圧のいずれもすることなく前記出力電源線および前記基準電源線を介して出力する非昇降圧動作とを選択的に実行する電源回路と、
前記出力電源線および前記基準電源線間に接続されたコンデンサと、
前記出力電源線および前記基準電源線を介して与えられる出力電圧の供給を受けて動作し、前記モータを駆動する駆動手段と、
前記モータの回転速度を回転速度指令に一致させるように前記駆動手段による前記モータの駆動を制御する駆動制御手段と、
前記出力電圧を検出する出力電圧検出手段と、
前記出力電源線および前記基準電源線の間に直列に設けられた回生スイッチ手段および回生抵抗からなる回生消費回路と、
前記出力電圧検出手段の検出値が回生消費電圧値未満のときにあっては前記回生スイッチ手段をオフし、当該検出値が回生消費電圧値以上のときにあっては前記回生スイッチ手段をオンする回生制御手段と、
外部から与えられるモード設定指令および前記出力電圧検出手段の検出値に応じて、前記電源回路の動作を制御する電源制御手段と、を備え、
前記電源回路は、
インダクタ、前記入力電源線と前記インダクタの一方の端子との間に接続される第1のスイッチ手段、前記インダクタの一方の端子と前記基準電源線との間に前記基準電源線側をアノードとして接続される第1のダイオード、前記インダクタの他方の端子と前記基準電源線との間に接続される第2のスイッチ手段、および前記インダクタの他方の端子と前記出力電源線との間に前記インダクタの他方の端子側をアノードとして接続される第2のダイオードを備え、
前記第1のスイッチ手段がオンされた状態で前記第2のスイッチ手段がスイッチングされることにより、前記昇圧動作が実行され、
前記第2のスイッチ手段がオフされた状態で、前記出力電圧検出手段の検出値が前記入力電圧の値より低い所定の降圧値となるように前記第1のスイッチ手段がスイッチングされることにより、前記降圧動作が実行され、
前記第1のスイッチ手段がオンされるとともに、前記第2のスイッチ手段がオフされることにより、前記非昇降圧動作が実行され、
前記電源制御手段は、
エコモードの設定を指令する前記モード設定指令が与えられると、
前記降圧動作を実行するように前記電源回路の動作を制御し、
トルク重視モードの設定を指令する前記モード設定指令が与えられると、
最初に前記非昇降圧動作を実行するように前記電源回路の動作を制御し、
前記非昇降圧動作の実行中、前記出力電圧検出手段の検出値が前記入力電圧の値より低い所定の加速開始判定値を下回ると、前記昇圧動作を実行するように前記電源回路の動作を制御し、
前記昇圧動作の実行中、前記出力電圧検出手段の検出値が前記入力電圧の値より高い所定の加速終了判定値を上回ると、前記非昇降圧動作を実行するように前記電源回路の動作を制御することを特徴とするロボットシステム。
【請求項2】
前記モータの異常を検出する異常検出手段を備え、
前記電源回路は、前記インダクタの一方の端子と前記出力電源線との間に接続される第3のスイッチ手段を備え、
前記異常検出手段により前記モータの異常が検出されると、または、外部から緊急停止を指令する緊急停止指令が与えられると、前記電源回路の動作状態にかかわらず前記第1のスイッチ手段をオフするとともに前記第2のスイッチ手段をオンし、さらに前記第3のスイッチ手段をオンすることにより、前記モータの相間を、前記第3のスイッチ手段、前記インダクタおよび前記第2のスイッチ手段を介して短絡することを特徴とする請求項1に記載のロボットシステム。
【図1】


【図2】

【図3】
【図4】
【図5】
【図6】
【図7】
【図8】

【図9】
【図10】
【図11】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−70565(P2013−70565A)
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願番号】特願2011−208797(P2011−208797)
【出願日】平成23年9月26日(2011.9.26)
【出願人】(501428545)株式会社デンソーウェーブ (1,155)
【Fターム(参考)】
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願日】平成23年9月26日(2011.9.26)
【出願人】(501428545)株式会社デンソーウェーブ (1,155)
【Fターム(参考)】
[ Back to top ]