
ロボットハンドおよびその遠隔制御方法
【課題】人間の手の動き等をトレースするためのロボットハンドを提供する。
【解決手段】プーリ53を介して配置した形状記憶合金繊維51に流す電流によるジュール熱で形状記憶合金繊維51を収縮させて関節を動かすことを可能とするロボットハンドである。形状記憶合金繊維51に流す電流値は、トレース先の関節33・34に対応する位置に設置した圧電素子35・36により発生される電圧を利用し、電気回路によって制御する。形状記憶合金繊維51の収縮量は、形状記憶合金繊維の収縮量−電流間の非線形生を利用することで調整可能なため、厳密な動作を簡便かつ軽量な機構および単純な制御方法にてトレース可能である。
【解決手段】プーリ53を介して配置した形状記憶合金繊維51に流す電流によるジュール熱で形状記憶合金繊維51を収縮させて関節を動かすことを可能とするロボットハンドである。形状記憶合金繊維51に流す電流値は、トレース先の関節33・34に対応する位置に設置した圧電素子35・36により発生される電圧を利用し、電気回路によって制御する。形状記憶合金繊維51の収縮量は、形状記憶合金繊維の収縮量−電流間の非線形生を利用することで調整可能なため、厳密な動作を簡便かつ軽量な機構および単純な制御方法にてトレース可能である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、人間の手の動き等をトレースして動作する義手などのロボットハンドに関する。
【背景技術】
【0002】
ロボットハンドあるいは義手には、人間の手の動きに近い動作が要求されるため、多指多関節可動が不可欠である。
【0003】
多指多関節可動を可能とするためには、複数の駆動源を用いれば良いが、それでは装置が大型化し、重量も重たくなり現実的ではない。このため、1個の駆動源を用いて多指多関節可動を制御する機構やワイヤ駆動による方式などが開発されてきている。(特許文献1および2)
【0004】
一方、連続的に配置された多数のアクチュエータを用いることで筋肉と同様な動きを実現させるための方法、そして多数のアクチュエータを制御するための多数のセンサおよびコンピュータアルゴリズムなどが提案されている。(特許文献3)
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第3793785号
【特許文献2】特開2005−46980号公報
【特許文献3】特開平7−136956号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上記従来の1個の駆動源を用いて多指多関節可動を制御する機構やワイヤ駆動による方式のものは、対象物を掴むことを目的に構成され、掴む動作に関しては人間に近い動きを可能としていが、人間の手の動きを厳密にトレースすることは出来ない。
【0007】
一方、連続的に配置された多数のアクチュエータを用いることで筋肉と同様な動きを実現させる方法に関しては、理論上、人間の動きを厳密にトレースすることが可能である。しかし、例えば手の動きを対象に考えると、先ず手の筋肉と同様な動きを実現させるための多数のアクチュエータをどの位置に配置したら良いかが問題となる。次に、それらアクチュエータに手の動きと同様な動きをさせるためには、手の動きを感知する多数のセンサが、また、それら多数のセンサからの信号を制御するための方法も必要となり、実現するために多くの技術的困難さを有している。
【0008】
本発明は、このような従来の問題点を解決し、簡便かつ軽量な機構および単純な制御方法にて動作可能なロボットハンドおよびその遠隔制御方法を提案する。
【課題を解決するための手段】
【0009】
そこで、本発明では、トレース対象の動きを感知するためのセンサとして圧電素子を、多指多関節可動ロボットハンドを駆動するためのアクチュエータとして形状記憶合金繊維を利用し、軽量かつ複雑な構成・制御を必要としない厳密な動作トレースを可能にする。
【0010】
本発明のロボットハンドおよびその遠隔制御方法は、トレース対象の指関節や腕関節のように屈曲運動する部分に、変位を電圧などに変換可能な圧電素子などのセンサを設置して指や腕等のトレース対象の運動を信号化し、前記信号化された指関節等の上記部分の屈曲運動量を、形状記憶合金繊維をアクチュエータとするロボットハンドに与えることで遠隔操作により厳密な動きをトレースすることを特徴とする。
【0011】
この場合に、前記信号化された指関節の屈曲運動量をロボットハンドに与える際には、複雑なコンピュータアルゴリズムを介さず、単純な電気回路のみを用いてハード的に行うことが好ましい。
【発明の効果】
【0012】
トレース対象の屈曲運動する部分にのみセンサを設置すればよいため、遠隔操作するための装置を簡便化することが可能となる。
【0013】
また、アクチュエータとして形状記憶合金繊維を用いるため、モータ駆動の場合に比べて重量を軽減可能なため、義手などへの適応も可能となる。
【0014】
さらに、単純な電気回路のみを用いてハード的に制御可能であることから、搬送が容易で使用場所が限定されない。
【図面の簡単な説明】
【0015】
【図1】圧電素子の特性試験条件を示す図(a)、(b)である。
【図2】圧電素子の特性試験結果を示す図(a)、(b)である。
【図3】指関節の屈曲運動による変位量を電気信号として捕らえるための装置の一例を示す図である。
【図4】形状記憶合金繊維の特性試験結果を示す図である。
【図5】指の動きをトレースするための装置の一例を示す図(a)〜(c)である。
【図6】制御回路の一例を示す図(a)、(b)である。
【図7】多指多関節可動ロボットハンドの一例を示す図である。
【図8】指関節の屈曲運動による変位量を電気信号として捕らえるための装置の一例を示す写真である。
【図9】多指多関節可動ロボットハンドの一例を示す写真(a)、(b)である。
【発明を実施するための形態】
【0016】
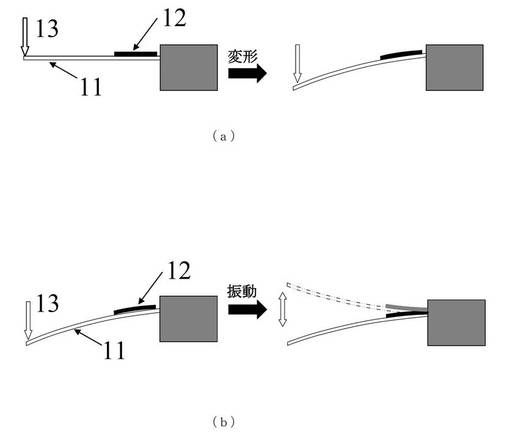
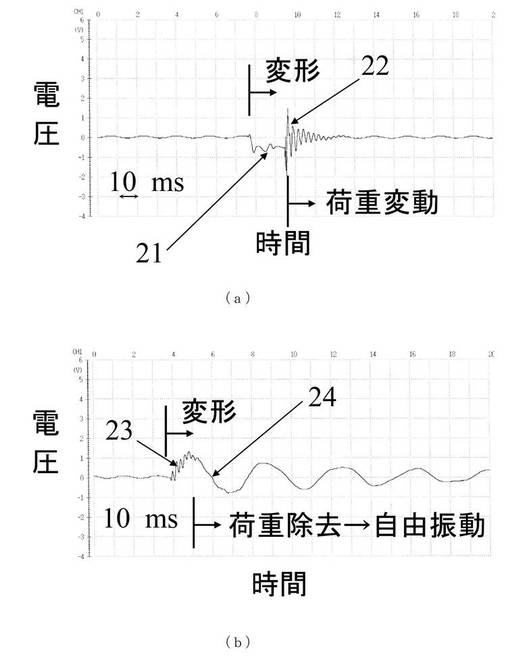
屈曲運動する部分の変位量を捕らえるセンサとして用いる圧電素子としては、柔軟性が要求されるため、ポリフッ化ビニリデン(PVDF)などの圧電性高分子フィルムが望ましい。図1に圧電素子の特性評価試験条件を模式的に示した図を示す。図1(a)左図のように、片持ちはり11の固定端近傍に圧電素子12を設置した片持ちはり11の先端近傍に荷重13を負荷することで、図1(a)右図のように片持ちはり11は静的に変形し、それに伴い圧電素子12も変形する。また、図1(b)左図のように、圧電素子12を固定端近傍に設置した片持ちはり11の先端近傍に荷重13を負荷させて変形させた後、図1(b)右図のように荷重13を除去し、自由振動させる。図2(a)・(b)に、図1(a)・(b)に対応する状態での圧電素子に発生する電圧の測定結果を示す。図2(a)では、図1(a)右図のように片持ちはり11に荷重13を負荷して静的に変形させたことに伴い圧電素子12が変形し、変形に対応した電圧が波形21のように発生する。また、片持ちはり11を静的に変形させるために加えていた荷重13を変動させることで波形22のように変動する電圧が発生する。図2(b)では、図1(b)左図のように片持ちはり11に荷重13を負荷して変形させたことに伴い圧電素子12が変形し、波形23のように電圧が発生する。また、片持ちはり11を変形させていた荷重13を除去することで片持ちはり11は自由振動して、それに伴い圧電素子12も変形を繰り返すため、波形24のように時間と共に減衰するような電圧が発生する。
【0017】
すなわち、圧電素子は変形量に対応する電圧を発生するため、圧電素子が発生する電圧量を把握しておけば、屈曲運動する部分の変位量を電気信号として捕らえる事が可能となる。ただし、センサとしては圧電素子に限らず、変位を検出することのできる各種の公知の検出器を用いることができる。
【0018】
図3に指関節の屈曲運動による変位量を電気信号として捕らえるための装置の一例を示す。指31を挿入可能で、かつ指31に密着するようなグローブ32で、指31の第一関節33および第二関節34のそれぞれの位置に対応した箇所に第一関節33および第二関節34それぞれの屈曲運動による変位量を電気信号として捕らえるための圧電素子35・36を表面に設置している。
【0019】
ロボットハンドを駆動させるアクチュエータとして用いる形状記憶合金繊維としては、応答性の良さが要求されるため、形状記憶合金繊維に流す電流によるジュール熱での動作が可能なものが望ましい。形状記憶合金繊維は、使用温度において超弾性を示す材料、例えば、Ni−Ti系合金、Ni−Al系合金、Fe−Ni−C系合金などに形状記憶処理を施した形状記憶合金線で構成できる。本実施形態では、バイオメタル・ファイバーBMF(製品名、トキコーポレーション製)を用いた。図4は、加熱することにより硬くなり収縮する形状記憶合金繊維の変位量(収縮量)と電流の関係を示したもので、予め22MPaの応力を負荷した繊維直径0.1mmの場合の結果である。結果から分かる通り、形状記憶合金繊維の変位量と電流の間には非線形性が認められる。図中の41の領域では、電流が40〜100mAの間で0.5mm程度の変位量を、42の領域では110〜140mAの間で2.5mm程度の変位量を、43の領域では150〜210mAの間で0.5mm程度の変位量を生じている。41、42、43の各領域中では変位量と電流の間に線形性が認められるため、変位量を電流値で制御することが可能となる。また、領域41および43では電流の変化に対して僅かな変位量しか生じないため、この領域内の電流値により詳細な変位量を得ることが出来る。これに対し、領域42では僅かな電流変化により大きな変位量を生じるため、この領域内の電流値では大きな変位量を得ることが出来る。
【0020】
すなわち、形状記憶合金繊維の変位量と電流の関係を把握し、その非線形性を利用することで電流値によって大きなまたは詳細な変位量を得ることが可能となる。例えば、トレース対象の動きに対してロボットハンドに大きな動作が必要な場合には上記関係の大きな増幅率を有する領域を用いて制御すればよいが、ロボットハンドの動作が小さくて足りるが精密な制御が必要な場合には上記関係の小さな増幅率を有する領域を用いて制御することができる。
【0021】
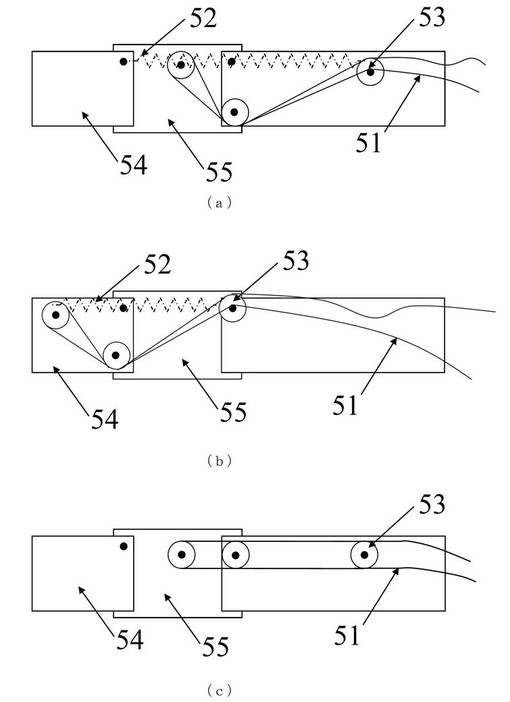
図5に指や腕等のトレース対象の動きをトレースするための装置の一例を示す。ここでは、トレースすべき対象(指)の屈曲運動量を各関節に設置した圧電素子で電気信号として捕らえ、捕らえた電気信号の大きさによって形状記憶合金繊維に流す電流値を変化させることでトレース対象と同じ動きを実現させている。図5(a)は指の第二関節の動きをさせる機構を示したもので、プーリ53を介して形状記憶合金繊維51が設置されている。このため、形状記憶合金繊維51に電流を流して収縮させることで第二関節を動かすことが可能となる。屈曲した第二関節を元に戻すには、形状記憶合金繊維51に流す電流値をゼロとして伸張させ、ばね52の復元力を用いる。図5(b)は指の第一関節の機構を示したもので、図5(a)の機構と組み合わせることで多関節の動きを可能とする。
【0022】
図示例では、第二関節に配置された関節点プーリと、第二関節の指の延伸方向の前後にそれぞれ配置された先端側プーリ及び基端側プーリとの合計三つのプーリ53を用いている。形状記憶合金繊維51は、基端側プーリの基端側で制御回路に対する両端側の接続部(一対の接続部、図示右端)を有し、一方の接続部から図示右側の基端側プーリ及び図示中央の関節点プーリを経て図示左側の先端側プーリに巻き付けられ、ここで反転して再び関節点プーリ及び基端側プーリの軸部を経て他方の接続部に戻るように設置されている。このとき、形状記憶合金繊維51は図5(a)に示すように第二関節が伸長した状態で関節点プーリを通過する部分で屈折するように架設される。このように形状記憶合金繊維51の両端側の接続部が共に基端側に配置されるとともに、一方の接続部から関節点プーリを経て屈折し先端側プーリで反転した後に基端側の他方の接続部に戻る架設態様を有することにより、形状記憶合金繊維51の両端側の接続部を特に基端側において固定できるため、一対の接続部の間に電流を流せばよいから、制御回路への導電接続が容易になる。また、形状記憶合金繊維51の中間部分が先端側プーリに巻き付けられて往復の経路部分を有する態様で架設されるので、往復の経路部分の伸縮度に差が生じても差動には支障がなく、繊維(線材)に加わる引張応力が偏在するといったことも防止できる。なお、上記基端側プーリは必須要素ではなく、単に両端側の接続部をそれぞれ固定しただけであってもよい。また、上記の往復の経路部分のうち少なくとも一方が関節点プーリに架設されていればよい。これらの点は図5(b)の第一関節についても同様である。
【0023】
各関節に設置した圧電素子35・36で電気信号として捕らえたトレースすべき指の屈曲運動量(屈曲運動の変位量或いは変位角度)が小さい場合は、圧電素子35・36から発生する電圧値も小さくなる。このため、この場合には形状記憶合金繊維51には低電流領域41に対応する電流を供給して、詳細な屈曲運動をトレースすることが可能となる。屈曲運動量が大きい場合は、圧電素子35・36から発生する電圧値も大きくなるため、形状記憶合金繊維51には中電流領域42に対応する電流を供給して、大きな屈曲運動をトレースすることが可能となる。大きな屈曲運動の後に小さな屈曲運動をする場合には、大きな屈曲運動により発生した電圧値に、小さな屈曲運動により発生した電圧値が加算された結果、高電流領域43に対応する電流を供給するように設定すれば、厳密な屈曲運動をトレースすることが可能となる。また、小さな屈曲運動の後に大きな屈曲運動をする場合には、小さな屈曲運動により発生した電圧値に、大きな屈曲運動により発生した電圧値が加算された結果、中電流領域42又は高電流領域43に対応する電流を供給するように設定すれば、大きな屈曲運動をトレースできる。なお、上記の各設定態様は、適宜の閾値を設けて屈曲運動量の大小を判断するように構成することにより実現できる。
【0024】
図5(c)は、ばね力を用いて屈曲した指の動きを元に戻していた図5(a)・(b)に対して屈曲状態から元に戻すためにも形状記憶合金繊維の通電による収縮を利用するものである。図5(c)の形状記憶合金繊維51についても架設態様そのものは上記第一関節や第二関節と同様である。ただし、この形状記憶合金51については、図示のように指が伸長状態にあるときに架設態様の屈折角度が小さいか若しくは屈折せずに伸展状態となるように、指が屈曲状態にあるときには架設態様の屈折角度が大きくなるように、プーリ53が配置構成されている点で異なる。
【0025】
図5(a)〜(c)では、形状記憶合金繊維51の端部、すなわち電流を与えるための回路などに接続する部分(上記の接続部)が同様な位置となるようにプーリ53を介して配置し、形状記憶合金繊維51に流す電流値を変化させることで形状記憶合金繊維51を変位させて関節を屈曲させる機構となっている。上記のような形状記憶合金繊維51の架設配置により、回路などへの接続が容易となり、簡便かつ軽量なロボットハンドを実現している。
【0026】
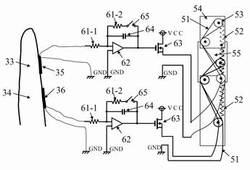
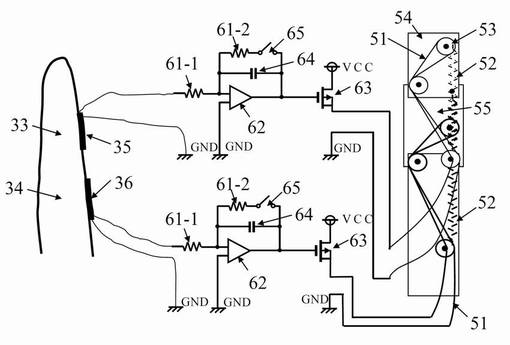
圧電素子の特性試験結果(図2)より、圧電素子は変形が生じたときのみ、電圧を発生する。この発生した電圧を指関節の屈曲量検出に用いるため、発生した電圧値を加算もしくは保持する必要がある。また、形状記憶合金繊維は電流で動作するため、圧電素子で発生した電圧で電流を制御し、形状記憶合金繊維を動作させるための回路が必要となる。図6は制御回路の一例を示したものである。図6(a)は図5(a)・(b)の指の動きを実現させるための回路であり、圧電素子35・36で発生した電圧を入力電圧として電気抵抗61−1を介してオペアンプ62で積分し、その電圧を用いてMOSFET63で形状記憶合金繊維51に流す電流量を制御している。なお、電気抵抗61−2、コンデンサ64およびスイッチ65からなる回路部分は、リセットのためのものである。回路のリセット動作は、例えば、電流による形状記憶合金繊維の変位(収縮)を解除してロボットハンドをばねにより復帰させる際などにおいて電流値を0にするために行われる。図5(b)は図5(c)の機構を動作させるためのものであり、関節を屈曲させるためおよび関節を元に戻すための両方の形状記憶合金繊維51に流す電流値を制御する。すなわち、図6(b)では、常にどちらかの形状記憶合金繊維51に電流が流れていて、圧電素子35・36からの入力があるとトランジスタ66により電流の流れる形状記憶合金繊維51が切り替わるようになっている。また電気抵抗61−4の値はどちらの形状記憶合金繊維51にも同じ値或いは作動に適した対応値の電流が流れるように調節してある。
【0027】
例えば、図6(a)において、電気抵抗61−1・61−2にはそれぞれ100Ω、コンデンサ64には0.22μFが適切である。また、図6(b)では、電気抵抗61−3には100Ω、電気抵抗61−4には90.8Ωが適切である。なお、図6に示す制御回路では入力電圧を積分して得られる電圧値に基づいて電流を生じさせているため、回路の積分定数に応じたトレース動作が得られる。しかしながら、これはあくまでも一例にすぎず、例えば、圧電素子その他のセンサの出力特性に応じて、その出力電圧そのもの、或いは、当該出力電圧に対して定電圧を加算若しくは減算した電圧値、さらには、当該出力電圧と所定の比例定数で比例する電圧値により電流を生じさせてもよい。また、これらの各電圧値を制御入力とする定電流回路により電流を生じさせても構わない。
【0028】
また、一般的に、上記低電流領域41、中電流領域42及び高電流領域43の各電流範囲と、実際の第一関節若しくは第二関節の屈折角度範囲との関係は、制御回路(電流出力回路)の入出力特性(圧電素子の出力電圧に対する制御回路の出力電流値の関係)を調整することによって好適に設定することができる。
【0029】
トレースすべき指の屈曲運動量が連続的に変化する場合は、連続的に変化する指の屈曲運動に対応して圧電素子35・36で発生したそれぞれの電圧値の差(時間変化率)を図6に示す制御回路の入力電圧とすることも可能である。これは、上記制御回路の前段に微分回路を設けることなどにより実現できる。このようにすると、トレース対象の屈曲動作速度の変化をより反映した出力電流の変化態様が得られる。
【0030】
また、連続的に変化する指の屈曲運動に対応して圧電素子35・36で発生したそれぞれの電圧値の差の大小を判断する回路を構築して、当該電圧値の差の大小に応じて図4に示す領域41・42・43のいずれかの電流領域に対応した電流値を形状記憶合金繊維51に流すことで連続的に変化する指の動きもトレース可能である。また、連続的、かつ瞬時に変化する指の屈曲運動に対しては、予め図4に示す形状記憶合金繊維の電流値と変位量の非線形関係をディジタル化しておき、圧電素子35・36で発生したそれぞれの電圧値の差、すなわち連続的に屈曲することで生じる連続的に変化する電圧値をディジタル信号に変換すれば、屈曲変位量に対応した大きさの電流を連続的に形状記憶合金繊維へ流すことが出来、よりスムーズなトレースが可能となる。これは、上記制御回路にマイクロプロセッサなどを搭載することにより実現できる。
【0031】
図7に指関節の屈曲運動による変位量を電気信号として捕らえるための装置、制御回路および指の動きをトレースするための装置を組み合わせた多指多関節可動ロボットハンドの一例を示す。図7に示す例では、指の動きをトレースするための装置として指の第二関節の動きをさせる機構(図5(a))と指の第一関節の動きをさせる機構(図5(b))とを組み合わせ、ばね52の復元力で関節の動きを元に戻すものである。
【0032】
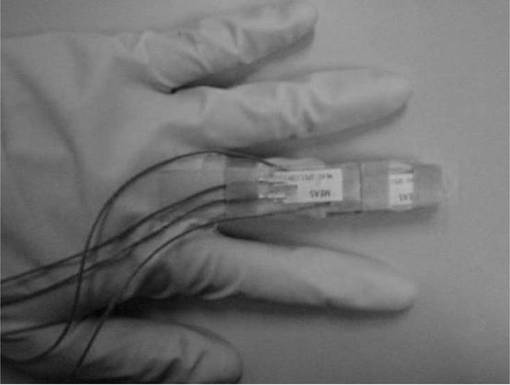
図8に指関節の屈曲運動による変位量を電気信号として捕らえるための装置の一例写真を示す。この装置は関節に対応する部分に圧電素子を配置したグローブで構成されている。
【0033】
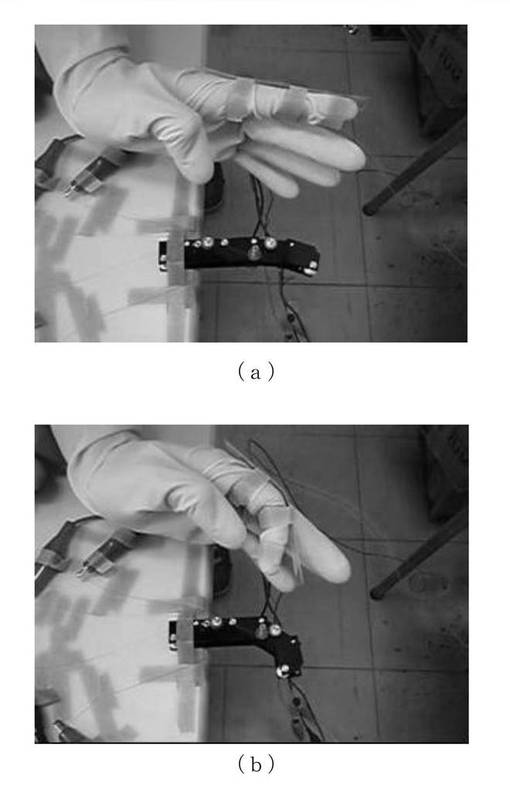
図9に多指多関節可動ロボットハンドの一例写真を示す。図9(a)はトレース対象である指が真直な状態であるため、ロボットハンドも真直な状態を維持している。図9(b)はトレース対象である指の第一・第二関節が屈曲した状態にあるため、ロボットハンドも指の動きを感知して第一・第二関節部分が屈曲している。
【産業上の利用可能性】
【0034】
遠隔操作により詳細な動きを必要とする産業への応用が期待される。また、軽量で動作のための音も発生しないため義手としての利用も可能である。
【符号の説明】
【0035】
11 片持ちはり
12 圧電素子
13 荷重
21・22・23・24 電圧波形
31 指
32 グローブ
33 第一関節
34 第二関節
35 第一関節の屈曲運動に対応する圧電素子
36 第二関節の屈曲運動に対応する圧電素子
41 低電流領域
42 中電流領域
43 高電流領域
51 形状記憶合金繊維
52 ばね
53 プーリ
54 第一指骨に対応するリンク材
55 第二指骨に対応するリンク材
61-1・61-2・61-3・61-4 電気抵抗
62 オペアンプ
63 MOSFET
64 コンデンサ
65 スイッチ
66 トランジスタ
【技術分野】
【0001】
本発明は、人間の手の動き等をトレースして動作する義手などのロボットハンドに関する。
【背景技術】
【0002】
ロボットハンドあるいは義手には、人間の手の動きに近い動作が要求されるため、多指多関節可動が不可欠である。
【0003】
多指多関節可動を可能とするためには、複数の駆動源を用いれば良いが、それでは装置が大型化し、重量も重たくなり現実的ではない。このため、1個の駆動源を用いて多指多関節可動を制御する機構やワイヤ駆動による方式などが開発されてきている。(特許文献1および2)
【0004】
一方、連続的に配置された多数のアクチュエータを用いることで筋肉と同様な動きを実現させるための方法、そして多数のアクチュエータを制御するための多数のセンサおよびコンピュータアルゴリズムなどが提案されている。(特許文献3)
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第3793785号
【特許文献2】特開2005−46980号公報
【特許文献3】特開平7−136956号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上記従来の1個の駆動源を用いて多指多関節可動を制御する機構やワイヤ駆動による方式のものは、対象物を掴むことを目的に構成され、掴む動作に関しては人間に近い動きを可能としていが、人間の手の動きを厳密にトレースすることは出来ない。
【0007】
一方、連続的に配置された多数のアクチュエータを用いることで筋肉と同様な動きを実現させる方法に関しては、理論上、人間の動きを厳密にトレースすることが可能である。しかし、例えば手の動きを対象に考えると、先ず手の筋肉と同様な動きを実現させるための多数のアクチュエータをどの位置に配置したら良いかが問題となる。次に、それらアクチュエータに手の動きと同様な動きをさせるためには、手の動きを感知する多数のセンサが、また、それら多数のセンサからの信号を制御するための方法も必要となり、実現するために多くの技術的困難さを有している。
【0008】
本発明は、このような従来の問題点を解決し、簡便かつ軽量な機構および単純な制御方法にて動作可能なロボットハンドおよびその遠隔制御方法を提案する。
【課題を解決するための手段】
【0009】
そこで、本発明では、トレース対象の動きを感知するためのセンサとして圧電素子を、多指多関節可動ロボットハンドを駆動するためのアクチュエータとして形状記憶合金繊維を利用し、軽量かつ複雑な構成・制御を必要としない厳密な動作トレースを可能にする。
【0010】
本発明のロボットハンドおよびその遠隔制御方法は、トレース対象の指関節や腕関節のように屈曲運動する部分に、変位を電圧などに変換可能な圧電素子などのセンサを設置して指や腕等のトレース対象の運動を信号化し、前記信号化された指関節等の上記部分の屈曲運動量を、形状記憶合金繊維をアクチュエータとするロボットハンドに与えることで遠隔操作により厳密な動きをトレースすることを特徴とする。
【0011】
この場合に、前記信号化された指関節の屈曲運動量をロボットハンドに与える際には、複雑なコンピュータアルゴリズムを介さず、単純な電気回路のみを用いてハード的に行うことが好ましい。
【発明の効果】
【0012】
トレース対象の屈曲運動する部分にのみセンサを設置すればよいため、遠隔操作するための装置を簡便化することが可能となる。
【0013】
また、アクチュエータとして形状記憶合金繊維を用いるため、モータ駆動の場合に比べて重量を軽減可能なため、義手などへの適応も可能となる。
【0014】
さらに、単純な電気回路のみを用いてハード的に制御可能であることから、搬送が容易で使用場所が限定されない。
【図面の簡単な説明】
【0015】
【図1】圧電素子の特性試験条件を示す図(a)、(b)である。
【図2】圧電素子の特性試験結果を示す図(a)、(b)である。
【図3】指関節の屈曲運動による変位量を電気信号として捕らえるための装置の一例を示す図である。
【図4】形状記憶合金繊維の特性試験結果を示す図である。
【図5】指の動きをトレースするための装置の一例を示す図(a)〜(c)である。
【図6】制御回路の一例を示す図(a)、(b)である。
【図7】多指多関節可動ロボットハンドの一例を示す図である。
【図8】指関節の屈曲運動による変位量を電気信号として捕らえるための装置の一例を示す写真である。
【図9】多指多関節可動ロボットハンドの一例を示す写真(a)、(b)である。
【発明を実施するための形態】
【0016】
屈曲運動する部分の変位量を捕らえるセンサとして用いる圧電素子としては、柔軟性が要求されるため、ポリフッ化ビニリデン(PVDF)などの圧電性高分子フィルムが望ましい。図1に圧電素子の特性評価試験条件を模式的に示した図を示す。図1(a)左図のように、片持ちはり11の固定端近傍に圧電素子12を設置した片持ちはり11の先端近傍に荷重13を負荷することで、図1(a)右図のように片持ちはり11は静的に変形し、それに伴い圧電素子12も変形する。また、図1(b)左図のように、圧電素子12を固定端近傍に設置した片持ちはり11の先端近傍に荷重13を負荷させて変形させた後、図1(b)右図のように荷重13を除去し、自由振動させる。図2(a)・(b)に、図1(a)・(b)に対応する状態での圧電素子に発生する電圧の測定結果を示す。図2(a)では、図1(a)右図のように片持ちはり11に荷重13を負荷して静的に変形させたことに伴い圧電素子12が変形し、変形に対応した電圧が波形21のように発生する。また、片持ちはり11を静的に変形させるために加えていた荷重13を変動させることで波形22のように変動する電圧が発生する。図2(b)では、図1(b)左図のように片持ちはり11に荷重13を負荷して変形させたことに伴い圧電素子12が変形し、波形23のように電圧が発生する。また、片持ちはり11を変形させていた荷重13を除去することで片持ちはり11は自由振動して、それに伴い圧電素子12も変形を繰り返すため、波形24のように時間と共に減衰するような電圧が発生する。
【0017】
すなわち、圧電素子は変形量に対応する電圧を発生するため、圧電素子が発生する電圧量を把握しておけば、屈曲運動する部分の変位量を電気信号として捕らえる事が可能となる。ただし、センサとしては圧電素子に限らず、変位を検出することのできる各種の公知の検出器を用いることができる。
【0018】
図3に指関節の屈曲運動による変位量を電気信号として捕らえるための装置の一例を示す。指31を挿入可能で、かつ指31に密着するようなグローブ32で、指31の第一関節33および第二関節34のそれぞれの位置に対応した箇所に第一関節33および第二関節34それぞれの屈曲運動による変位量を電気信号として捕らえるための圧電素子35・36を表面に設置している。
【0019】
ロボットハンドを駆動させるアクチュエータとして用いる形状記憶合金繊維としては、応答性の良さが要求されるため、形状記憶合金繊維に流す電流によるジュール熱での動作が可能なものが望ましい。形状記憶合金繊維は、使用温度において超弾性を示す材料、例えば、Ni−Ti系合金、Ni−Al系合金、Fe−Ni−C系合金などに形状記憶処理を施した形状記憶合金線で構成できる。本実施形態では、バイオメタル・ファイバーBMF(製品名、トキコーポレーション製)を用いた。図4は、加熱することにより硬くなり収縮する形状記憶合金繊維の変位量(収縮量)と電流の関係を示したもので、予め22MPaの応力を負荷した繊維直径0.1mmの場合の結果である。結果から分かる通り、形状記憶合金繊維の変位量と電流の間には非線形性が認められる。図中の41の領域では、電流が40〜100mAの間で0.5mm程度の変位量を、42の領域では110〜140mAの間で2.5mm程度の変位量を、43の領域では150〜210mAの間で0.5mm程度の変位量を生じている。41、42、43の各領域中では変位量と電流の間に線形性が認められるため、変位量を電流値で制御することが可能となる。また、領域41および43では電流の変化に対して僅かな変位量しか生じないため、この領域内の電流値により詳細な変位量を得ることが出来る。これに対し、領域42では僅かな電流変化により大きな変位量を生じるため、この領域内の電流値では大きな変位量を得ることが出来る。
【0020】
すなわち、形状記憶合金繊維の変位量と電流の関係を把握し、その非線形性を利用することで電流値によって大きなまたは詳細な変位量を得ることが可能となる。例えば、トレース対象の動きに対してロボットハンドに大きな動作が必要な場合には上記関係の大きな増幅率を有する領域を用いて制御すればよいが、ロボットハンドの動作が小さくて足りるが精密な制御が必要な場合には上記関係の小さな増幅率を有する領域を用いて制御することができる。
【0021】
図5に指や腕等のトレース対象の動きをトレースするための装置の一例を示す。ここでは、トレースすべき対象(指)の屈曲運動量を各関節に設置した圧電素子で電気信号として捕らえ、捕らえた電気信号の大きさによって形状記憶合金繊維に流す電流値を変化させることでトレース対象と同じ動きを実現させている。図5(a)は指の第二関節の動きをさせる機構を示したもので、プーリ53を介して形状記憶合金繊維51が設置されている。このため、形状記憶合金繊維51に電流を流して収縮させることで第二関節を動かすことが可能となる。屈曲した第二関節を元に戻すには、形状記憶合金繊維51に流す電流値をゼロとして伸張させ、ばね52の復元力を用いる。図5(b)は指の第一関節の機構を示したもので、図5(a)の機構と組み合わせることで多関節の動きを可能とする。
【0022】
図示例では、第二関節に配置された関節点プーリと、第二関節の指の延伸方向の前後にそれぞれ配置された先端側プーリ及び基端側プーリとの合計三つのプーリ53を用いている。形状記憶合金繊維51は、基端側プーリの基端側で制御回路に対する両端側の接続部(一対の接続部、図示右端)を有し、一方の接続部から図示右側の基端側プーリ及び図示中央の関節点プーリを経て図示左側の先端側プーリに巻き付けられ、ここで反転して再び関節点プーリ及び基端側プーリの軸部を経て他方の接続部に戻るように設置されている。このとき、形状記憶合金繊維51は図5(a)に示すように第二関節が伸長した状態で関節点プーリを通過する部分で屈折するように架設される。このように形状記憶合金繊維51の両端側の接続部が共に基端側に配置されるとともに、一方の接続部から関節点プーリを経て屈折し先端側プーリで反転した後に基端側の他方の接続部に戻る架設態様を有することにより、形状記憶合金繊維51の両端側の接続部を特に基端側において固定できるため、一対の接続部の間に電流を流せばよいから、制御回路への導電接続が容易になる。また、形状記憶合金繊維51の中間部分が先端側プーリに巻き付けられて往復の経路部分を有する態様で架設されるので、往復の経路部分の伸縮度に差が生じても差動には支障がなく、繊維(線材)に加わる引張応力が偏在するといったことも防止できる。なお、上記基端側プーリは必須要素ではなく、単に両端側の接続部をそれぞれ固定しただけであってもよい。また、上記の往復の経路部分のうち少なくとも一方が関節点プーリに架設されていればよい。これらの点は図5(b)の第一関節についても同様である。
【0023】
各関節に設置した圧電素子35・36で電気信号として捕らえたトレースすべき指の屈曲運動量(屈曲運動の変位量或いは変位角度)が小さい場合は、圧電素子35・36から発生する電圧値も小さくなる。このため、この場合には形状記憶合金繊維51には低電流領域41に対応する電流を供給して、詳細な屈曲運動をトレースすることが可能となる。屈曲運動量が大きい場合は、圧電素子35・36から発生する電圧値も大きくなるため、形状記憶合金繊維51には中電流領域42に対応する電流を供給して、大きな屈曲運動をトレースすることが可能となる。大きな屈曲運動の後に小さな屈曲運動をする場合には、大きな屈曲運動により発生した電圧値に、小さな屈曲運動により発生した電圧値が加算された結果、高電流領域43に対応する電流を供給するように設定すれば、厳密な屈曲運動をトレースすることが可能となる。また、小さな屈曲運動の後に大きな屈曲運動をする場合には、小さな屈曲運動により発生した電圧値に、大きな屈曲運動により発生した電圧値が加算された結果、中電流領域42又は高電流領域43に対応する電流を供給するように設定すれば、大きな屈曲運動をトレースできる。なお、上記の各設定態様は、適宜の閾値を設けて屈曲運動量の大小を判断するように構成することにより実現できる。
【0024】
図5(c)は、ばね力を用いて屈曲した指の動きを元に戻していた図5(a)・(b)に対して屈曲状態から元に戻すためにも形状記憶合金繊維の通電による収縮を利用するものである。図5(c)の形状記憶合金繊維51についても架設態様そのものは上記第一関節や第二関節と同様である。ただし、この形状記憶合金51については、図示のように指が伸長状態にあるときに架設態様の屈折角度が小さいか若しくは屈折せずに伸展状態となるように、指が屈曲状態にあるときには架設態様の屈折角度が大きくなるように、プーリ53が配置構成されている点で異なる。
【0025】
図5(a)〜(c)では、形状記憶合金繊維51の端部、すなわち電流を与えるための回路などに接続する部分(上記の接続部)が同様な位置となるようにプーリ53を介して配置し、形状記憶合金繊維51に流す電流値を変化させることで形状記憶合金繊維51を変位させて関節を屈曲させる機構となっている。上記のような形状記憶合金繊維51の架設配置により、回路などへの接続が容易となり、簡便かつ軽量なロボットハンドを実現している。
【0026】
圧電素子の特性試験結果(図2)より、圧電素子は変形が生じたときのみ、電圧を発生する。この発生した電圧を指関節の屈曲量検出に用いるため、発生した電圧値を加算もしくは保持する必要がある。また、形状記憶合金繊維は電流で動作するため、圧電素子で発生した電圧で電流を制御し、形状記憶合金繊維を動作させるための回路が必要となる。図6は制御回路の一例を示したものである。図6(a)は図5(a)・(b)の指の動きを実現させるための回路であり、圧電素子35・36で発生した電圧を入力電圧として電気抵抗61−1を介してオペアンプ62で積分し、その電圧を用いてMOSFET63で形状記憶合金繊維51に流す電流量を制御している。なお、電気抵抗61−2、コンデンサ64およびスイッチ65からなる回路部分は、リセットのためのものである。回路のリセット動作は、例えば、電流による形状記憶合金繊維の変位(収縮)を解除してロボットハンドをばねにより復帰させる際などにおいて電流値を0にするために行われる。図5(b)は図5(c)の機構を動作させるためのものであり、関節を屈曲させるためおよび関節を元に戻すための両方の形状記憶合金繊維51に流す電流値を制御する。すなわち、図6(b)では、常にどちらかの形状記憶合金繊維51に電流が流れていて、圧電素子35・36からの入力があるとトランジスタ66により電流の流れる形状記憶合金繊維51が切り替わるようになっている。また電気抵抗61−4の値はどちらの形状記憶合金繊維51にも同じ値或いは作動に適した対応値の電流が流れるように調節してある。
【0027】
例えば、図6(a)において、電気抵抗61−1・61−2にはそれぞれ100Ω、コンデンサ64には0.22μFが適切である。また、図6(b)では、電気抵抗61−3には100Ω、電気抵抗61−4には90.8Ωが適切である。なお、図6に示す制御回路では入力電圧を積分して得られる電圧値に基づいて電流を生じさせているため、回路の積分定数に応じたトレース動作が得られる。しかしながら、これはあくまでも一例にすぎず、例えば、圧電素子その他のセンサの出力特性に応じて、その出力電圧そのもの、或いは、当該出力電圧に対して定電圧を加算若しくは減算した電圧値、さらには、当該出力電圧と所定の比例定数で比例する電圧値により電流を生じさせてもよい。また、これらの各電圧値を制御入力とする定電流回路により電流を生じさせても構わない。
【0028】
また、一般的に、上記低電流領域41、中電流領域42及び高電流領域43の各電流範囲と、実際の第一関節若しくは第二関節の屈折角度範囲との関係は、制御回路(電流出力回路)の入出力特性(圧電素子の出力電圧に対する制御回路の出力電流値の関係)を調整することによって好適に設定することができる。
【0029】
トレースすべき指の屈曲運動量が連続的に変化する場合は、連続的に変化する指の屈曲運動に対応して圧電素子35・36で発生したそれぞれの電圧値の差(時間変化率)を図6に示す制御回路の入力電圧とすることも可能である。これは、上記制御回路の前段に微分回路を設けることなどにより実現できる。このようにすると、トレース対象の屈曲動作速度の変化をより反映した出力電流の変化態様が得られる。
【0030】
また、連続的に変化する指の屈曲運動に対応して圧電素子35・36で発生したそれぞれの電圧値の差の大小を判断する回路を構築して、当該電圧値の差の大小に応じて図4に示す領域41・42・43のいずれかの電流領域に対応した電流値を形状記憶合金繊維51に流すことで連続的に変化する指の動きもトレース可能である。また、連続的、かつ瞬時に変化する指の屈曲運動に対しては、予め図4に示す形状記憶合金繊維の電流値と変位量の非線形関係をディジタル化しておき、圧電素子35・36で発生したそれぞれの電圧値の差、すなわち連続的に屈曲することで生じる連続的に変化する電圧値をディジタル信号に変換すれば、屈曲変位量に対応した大きさの電流を連続的に形状記憶合金繊維へ流すことが出来、よりスムーズなトレースが可能となる。これは、上記制御回路にマイクロプロセッサなどを搭載することにより実現できる。
【0031】
図7に指関節の屈曲運動による変位量を電気信号として捕らえるための装置、制御回路および指の動きをトレースするための装置を組み合わせた多指多関節可動ロボットハンドの一例を示す。図7に示す例では、指の動きをトレースするための装置として指の第二関節の動きをさせる機構(図5(a))と指の第一関節の動きをさせる機構(図5(b))とを組み合わせ、ばね52の復元力で関節の動きを元に戻すものである。
【0032】
図8に指関節の屈曲運動による変位量を電気信号として捕らえるための装置の一例写真を示す。この装置は関節に対応する部分に圧電素子を配置したグローブで構成されている。
【0033】
図9に多指多関節可動ロボットハンドの一例写真を示す。図9(a)はトレース対象である指が真直な状態であるため、ロボットハンドも真直な状態を維持している。図9(b)はトレース対象である指の第一・第二関節が屈曲した状態にあるため、ロボットハンドも指の動きを感知して第一・第二関節部分が屈曲している。
【産業上の利用可能性】
【0034】
遠隔操作により詳細な動きを必要とする産業への応用が期待される。また、軽量で動作のための音も発生しないため義手としての利用も可能である。
【符号の説明】
【0035】
11 片持ちはり
12 圧電素子
13 荷重
21・22・23・24 電圧波形
31 指
32 グローブ
33 第一関節
34 第二関節
35 第一関節の屈曲運動に対応する圧電素子
36 第二関節の屈曲運動に対応する圧電素子
41 低電流領域
42 中電流領域
43 高電流領域
51 形状記憶合金繊維
52 ばね
53 プーリ
54 第一指骨に対応するリンク材
55 第二指骨に対応するリンク材
61-1・61-2・61-3・61-4 電気抵抗
62 オペアンプ
63 MOSFET
64 コンデンサ
65 スイッチ
66 トランジスタ
【特許請求の範囲】
【請求項1】
トレース対象の動きを捕らえるセンサと、該センサからの信号に基づき変位するアクチュエータとを有し、該アクチュエータを変位させて前記トレース対象に対応する動作を行うことを特徴とするロボットハンド。
【請求項2】
前記センサは、圧電特性を有する材料で構成され、該材料は変形により電気信号を発生する物質であることを特徴とする請求項1に記載のロボットハンド。
【請求項3】
前記アクチュエータは、形状記億機能を有する材料から構成され、該材料は電流値に応じて変形する物質であり、前記電流値に対する変形特性の非線形性を有することを特徴とする請求項1に記載のロボットハンド。
【請求項4】
前記アクチュエータは、形状記億機能を有する材料から構成され、該材料は電流値に応じて伸縮する延長材であり、両端部側に設けられた一対の接続部が共に基端側に配置されるとともに、一方の接続部から関節点プーリで屈折して先端側プーリに伸び、該先端側プーリで反転した後に前記基端側の他方の接続部に戻る架設態様を有し、前記一対の接続部の間に流れる電流が制御されることを特徴とする請求項1又は2に記載のロボットハンド。
【請求項5】
前記センサからの電気信号に基づき、前記アクチュエータに供給する電流値を変化させることにより請求項1から3のいずれか一項に記載のロボットハンドを制御することを特徴とするロボットハンドの遠隔制御方法。
【請求項1】
トレース対象の動きを捕らえるセンサと、該センサからの信号に基づき変位するアクチュエータとを有し、該アクチュエータを変位させて前記トレース対象に対応する動作を行うことを特徴とするロボットハンド。
【請求項2】
前記センサは、圧電特性を有する材料で構成され、該材料は変形により電気信号を発生する物質であることを特徴とする請求項1に記載のロボットハンド。
【請求項3】
前記アクチュエータは、形状記億機能を有する材料から構成され、該材料は電流値に応じて変形する物質であり、前記電流値に対する変形特性の非線形性を有することを特徴とする請求項1に記載のロボットハンド。
【請求項4】
前記アクチュエータは、形状記億機能を有する材料から構成され、該材料は電流値に応じて伸縮する延長材であり、両端部側に設けられた一対の接続部が共に基端側に配置されるとともに、一方の接続部から関節点プーリで屈折して先端側プーリに伸び、該先端側プーリで反転した後に前記基端側の他方の接続部に戻る架設態様を有し、前記一対の接続部の間に流れる電流が制御されることを特徴とする請求項1又は2に記載のロボットハンド。
【請求項5】
前記センサからの電気信号に基づき、前記アクチュエータに供給する電流値を変化させることにより請求項1から3のいずれか一項に記載のロボットハンドを制御することを特徴とするロボットハンドの遠隔制御方法。
【図1】


【図2】
【図3】

【図4】

【図5】
【図6】

【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−213818(P2012−213818A)
【公開日】平成24年11月8日(2012.11.8)
【国際特許分類】
【出願番号】特願2011−79336(P2011−79336)
【出願日】平成23年3月31日(2011.3.31)
【出願人】(504237050)独立行政法人国立高等専門学校機構 (656)
【Fターム(参考)】
【公開日】平成24年11月8日(2012.11.8)
【国際特許分類】
【出願日】平成23年3月31日(2011.3.31)
【出願人】(504237050)独立行政法人国立高等専門学校機構 (656)
【Fターム(参考)】
[ Back to top ]