
ロボットハンド
【課題】ロボットハンドにて簡単な構造で先端部の非装着時に流体流路および伝送経路を遮断する。
【解決手段】ロボットハンドでは、ハンド本体部3と把持部を有するハンド先端部4とが着脱自在である。ハンド本体部3は、第2穴部352、第2穴部352内に設けられる摺動部38および付勢部39、把持部の駆動用の流体が流れる第2流体流路342、並びに、把持部からの信号が伝送される伝送経路37を有する。これらの流路および経路の一部は摺動部38に形成される。ハンド先端部4の非装着時には、摺動部38が付勢部39に付勢されて遮断位置に位置し、これらの流路および経路が遮断され、ハンド先端部4の装着時には、ハンド先端部4により押されて摺動部38が接続位置に位置し、これらの流路および経路が摺動部38を介して接続される。これにより、簡単な構造でハンド先端部4の非装着時に第2流体流路342および伝送経路37が遮断される。
【解決手段】ロボットハンドでは、ハンド本体部3と把持部を有するハンド先端部4とが着脱自在である。ハンド本体部3は、第2穴部352、第2穴部352内に設けられる摺動部38および付勢部39、把持部の駆動用の流体が流れる第2流体流路342、並びに、把持部からの信号が伝送される伝送経路37を有する。これらの流路および経路の一部は摺動部38に形成される。ハンド先端部4の非装着時には、摺動部38が付勢部39に付勢されて遮断位置に位置し、これらの流路および経路が遮断され、ハンド先端部4の装着時には、ハンド先端部4により押されて摺動部38が接続位置に位置し、これらの流路および経路が摺動部38を介して接続される。これにより、簡単な構造でハンド先端部4の非装着時に第2流体流路342および伝送経路37が遮断される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ワークを把持するロボットハンドに関する。
【背景技術】
【0002】
従来より、自動組立ライン等において組立ロボットが用いられており、組立ロボットでは、ワークを把持するロボットハンドがロボットアームに接続されることにより、ロボットハンドが3次元的に移動可能とされる。ロボットハンドでは、圧縮エアを用いた把持部の駆動により、ワークの把持および解放が行われる。また、各種ワークに対応するために、把持部を有する先端部と、ロボットアームに接続された本体部とが着脱自在とされるロボットハンドも知られており、このようなロボットハンドでは、先端部を離脱した際に、圧縮エアが漏れ出すことを避けるため、本体部における圧縮エアの流路も遮断されることが好ましい。
【0003】
特許文献1では、ロボットアームに各種ツール等を着脱するためのロボットアームカップリング装置が開示されており、当該装置では、ツール側アタッチメントをアーム側アタッチメントに対して装着または離脱した際に、アーム側アタッチメントにおける圧縮エアの流路も接続または遮断される。具体的には、アーム側アタッチメントの本体にアーム側流体通路と連通する装着孔が設けられ、装着孔内では、開閉ボールが圧縮バネにより装着孔の吐出口を閉鎖するように付勢される。ツール側アタッチメントをアーム側アタッチメントに連結すると、ツール側アタッチメントの接続口部の先端部が装着孔内に挿嵌して進入し、開閉ボールが圧縮バネの弾性力に抗して押圧され、これにより、アーム側流体通路内に供給される圧縮エアがツールに供給される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−23050号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、ロボットハンドの先端部では、把持部におけるワークの把持状態を示す信号が取得されることがあり、先端部からの当該信号を伝送する伝送経路が本体部にも設けられる。この場合、予期しない不具合が生じることがある。
【0006】
また、特許文献1の装置では、装着孔内の開閉ボールを押圧するのみで、圧縮エアの流路が簡単に開放されてしまうため、圧縮エアの流路が誤って開放される虞がある。
【0007】
本発明は上記課題に鑑みなされたものであり、ロボットハンドにおいて、簡単な構造で先端部の非装着時に流体流路および伝送経路を遮断することを目的としており、流体流路が誤って接続されることをより確実に防止することも目的としている。
【課題を解決するための手段】
【0008】
請求項1に記載の発明は、ロボットハンドであって、本体部と、前記本体部に着脱自在に装着されるとともに、ワークを把持する把持部を有する先端部とを備え、前記本体部が、穴部と、前記穴部の中心軸に沿って前記穴部内を摺動する摺動部と、前記中心軸に沿う一の方向へと前記摺動部を付勢する付勢部と、前記把持部の駆動用の流体が流れる流体流路と、前記把持部におけるワークの把持状態を示す信号が伝送される伝送経路とを備え、前記流体流路の一部が前記摺動部に形成され、前記伝送経路の一部が前記摺動部に設けられ、前記先端部の非装着時に、前記摺動部が前記付勢部に付勢されて遮断位置に位置することにより、前記流体流路および前記伝送経路のそれぞれが遮断され、前記先端部の装着時に、前記先端部により直接的または間接的に押されて前記摺動部が接続位置に位置することにより、前記流体流路および前記伝送経路のそれぞれが前記摺動部を介して接続される。
【0009】
請求項2に記載の発明は、請求項1に記載のロボットハンドであって、前記摺動部が前記遮断位置から前記接続位置を通り過ぎた位置まで移動した場合に、前記流体流路および前記伝送経路のそれぞれが遮断される。
【0010】
請求項3に記載の発明は、請求項1または2に記載のロボットハンドであって、前記本体部が、前記先端部と結合する結合機構と、前記結合機構の駆動用の電気的回路と、前記電気的回路を遮断する回路遮断部とをさらに備え、前記先端部を前記本体部への装着位置に配置した際に、前記先端部が前記回路遮断部と接触することにより、前記回路遮断部による前記電気的回路の遮断が解除される。
【0011】
請求項4に記載の発明は、請求項3に記載のロボットハンドであって、前記結合機構の駆動により、前記先端部が有する移動部材が移動し、前記移動部材が前記摺動部を押すことにより前記摺動部が前記接続位置に配置される。
【0012】
請求項5に記載の発明は、ロボットハンドであって、本体部と、前記本体部に着脱自在に装着されるとともに、ワークを把持する把持部を有する先端部とを備え、前記本体部が、穴部と、前記穴部の中心軸に沿って前記穴部内を摺動する摺動部と、前記中心軸に沿う一の方向へと前記摺動部を付勢する付勢部と、前記把持部の駆動用の流体が流れる流体流路とを備え、前記流体流路の一部が前記摺動部に形成され、前記先端部の非装着時に、前記摺動部が前記付勢部に付勢されて遮断位置に位置することにより、前記流体流路が遮断され、前記先端部の装着時に、前記先端部により直接的または間接的に押されて前記摺動部が接続位置に位置することにより、前記流体流路が前記摺動部を介して接続され、前記摺動部が前記遮断位置から前記接続位置を通り過ぎた位置まで移動した場合に、前記流体流路が遮断される。
【発明の効果】
【0013】
請求項1ないし4の発明では、ロボットハンドにおいて、簡単な構造で先端部の非装着時に流体流路および伝送経路を遮断することができる。
【0014】
また、請求項2の発明では、流体流路および伝送経路のそれぞれが誤って接続されることをより確実に防止することができ、請求項3の発明では、先端部の誤装着を防止することができる。
【0015】
請求項5の発明では、流体流路が誤って接続されることをより確実に防止することができる。
【図面の簡単な説明】
【0016】
【図1】組立ロボットの側面図である。
【図2】ハンド本体部の底面図である。
【図3】ハンド本体部の断面図である。
【図4】電気的回路の構成を示すブロック図である。
【図5】第2穴部近傍を拡大して示す図である。
【図6】ハンド先端部の部分断面図である。
【図7】ロボットハンドを示す図である。
【図8】摺動部および係合穴部近傍を示す図である。
【図9】摺動部および係合穴部近傍を示す図である。
【図10】摺動部の動作を説明するための図である。
【発明を実施するための形態】
【0017】
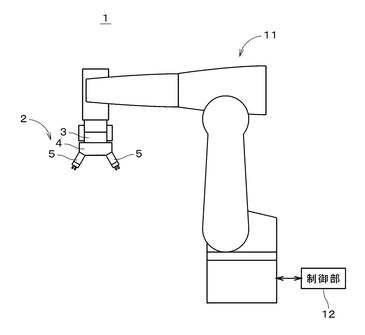
図1は、本発明の一の実施の形態に係る組立ロボット1の側面図である。組立ロボット1は、多数の部品から構成される組立体を自動的に組み立てる自動組立ライン等において用いられる産業用ロボットである。図1の組立ロボット1は、多自由度(例えば、6自由度)のロボットアーム11、ロボットアーム11の先端に着脱可能に取り付けられるロボットハンド2、および、組立ロボット1の全体制御を担う制御部12を備え、ロボットアーム11によりロボットハンド2が自在に移動可能とされる。ロボットハンド2は、ロボットアーム11に取り付けられるハンド本体部3、および、ハンド本体部3に着脱自在に装着されるハンド先端部4を備え、ハンド先端部4にはワークを把持する複数の把持部5が設けられる。
【0018】
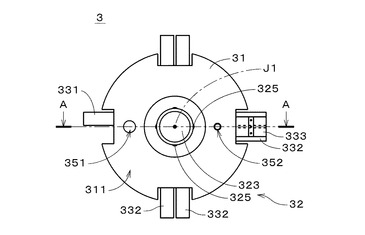
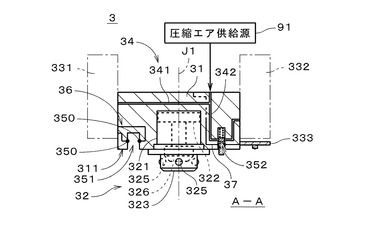
図2は、ハンド本体部3の底面図であり、図3は図2中の矢印A−Aの位置におけるハンド本体部3の断面図である。
【0019】
ハンド本体部3は、所定の中心軸J1を中心とする厚い円板状の本体31を有し、本体31の上下方向(図3中の上下方向に対応し、重力方向であるとは限らない。後述の図5ないし図10において同様。)の下側における面311(以下、単に「下面311」という。)において、中央にはハンド先端部4と結合する結合機構32が設けられる。図3に示すように、結合機構32は、本体31の内部に設けられるシリンダ部321、シリンダ部321内にて中心軸J1方向に移動するピストン部322、および、本体31の下面311から突出する有底円筒状の結合部323を有する。シリンダ部321には、圧縮エアの流路が接続されており、当該流路に接続された後述の電磁弁331のON/OFFを制御することにより、ピストン部322が図3中の上下方向(中心軸J1方向)に移動する。
【0020】
ピストン部322には、中空の結合部323内に配置される押出部326が接続される。また、中心軸J1を中心とする結合部323の外周面には複数のボール支持孔が設けられており、各ボール支持孔内には結合用ボール325が配置されて保持される。結合機構32において、ピストン部322が図3中の下方へと移動すると、厚い円板状の押出部326の側面により結合用ボール325が中心軸J1から離れる方向(すなわち、中心軸J1を中心とする径方向の外側)へと押し出され、結合用ボール325の一部が結合部323の外周面から突出する。
【0021】
図2および図3に示すように、本体31の下面311には、有底(ただし、図3中の上側が底面となる。)の第1穴部351および第2穴部352が中心軸J1に平行に形成され、第1穴部351および第2穴部352のそれぞれでは、中心軸J1に垂直な断面は円である。図2に示すように、ハンド本体部3の本体31の側面には、電磁弁331,332および伝送基板333が固定され、伝送基板333は、図2中の右側に配置される電磁弁332の下方(図3中の下側)に配置される。なお、図3では、電磁弁331,332を二点鎖線にて示している。
【0022】
本体31の内部には、図3に示すように、外部に設けられた圧縮エア供給源91に接続される流体流路34が形成される。流体流路34は分岐しており、一方の第1流体流路341は電磁弁331(の一のポート)に接続され、他方の第2流体流路342は第2穴部352を介して複数の電磁弁332に接続される。本体31の内部には、さらに、一端が伝送基板333に接続されるとともに他端が制御部12(図1参照)に接続される伝送経路37、および、結合機構32の駆動用の電気的回路36が形成される。ハンド先端部4がハンド本体部3に装着されていない状態(すなわち、ハンド先端部4がハンド本体部3から離脱された状態)では、伝送経路37の一部は第2穴部352により遮断され、電気的回路36の一部も第1穴部351により遮断される。このように、第2穴部352は伝送経路37を遮断する経路遮断部であり、第1穴部351は電気的回路36を遮断する回路遮断部である。第1穴部351の側面には、電気的回路36の2つの端子350が形成される。
【0023】
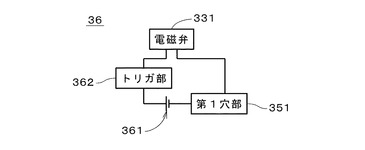
図4は、電気的回路36の構成を示すブロック図である。電気的回路36は、電磁弁331に接続されて電磁弁331のON/OFFを制御するものであり、電気的回路36には、電源部361およびトリガ部362、並びに、回路遮断部である第1穴部351が設けられる。電気的回路36の動作については後述する。
【0024】
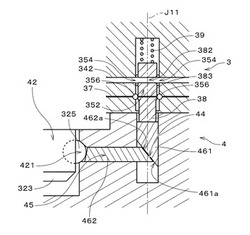
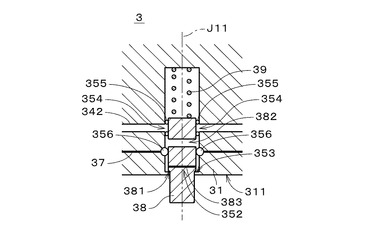
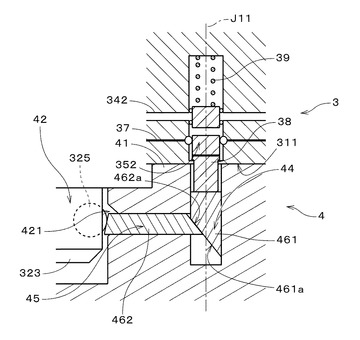
図5は、図3の第2穴部352近傍を拡大して示す図である。第2穴部352内には、略円柱状の摺動部38が挿入される。摺動部38の上部の直径は第2穴部352の直径よりも僅かに小さく、後述するように、摺動部38は第2穴部352の中心軸J11に沿って第2穴部352内を摺動する。摺動部38では、下部の直径が上部の直径よりも小さく、中心軸J11方向の中央近傍において、下方を向く環状面381が形成される。また、第2穴部352の開口縁には内側に突出する環状突出部353が設けられる。摺動部38と第2穴部352の底面との間には圧縮バネである付勢部39が設けられ、付勢部39により摺動部38が中心軸J11に沿って下方へと付勢される。これにより、摺動部38の環状面381が環状突出部353に当接し、摺動部38の先端(下端)が本体31の下面311から突出する。以下、環状面381が環状突出部353に当接する摺動部38の位置を「遮断位置」という。
【0025】
摺動部38内には図5中の左右方向に伸びる貫通孔382、および、導電性材料にて形成された伝送部383が形成される。なお、摺動部38自体は絶縁性材料にて形成される。既述のように、本体31内の第2流体流路342は、第2穴部352を経由しており、第2穴部352の側面には、第2流体流路342の2つの開口354が形成される。各開口354の周囲には環状のパッキン355が設けられる。また、伝送経路37は第2穴部352により遮断されており、第2穴部352の側面には、伝送経路37の2つの端子356が形成される。図5に示すように、摺動部38の環状面381が環状突出部353に当接した状態(すなわち、遮断位置)では、摺動部38の貫通孔382が開口354よりも下方に配置されて、各開口354が摺動部38の他の部位により閉塞される。また、摺動部38の伝送部383が端子356よりも下方に配置され、2つの端子356間が摺動部38の他の部位により電気的に遮断される。
【0026】
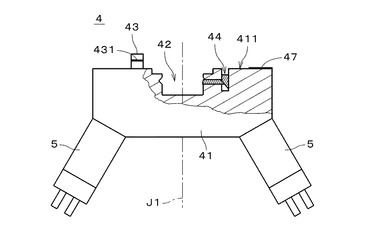
図6は、ハンド先端部4の部分断面図であり、中心軸J1を含む面にて切断した断面を部分的に示している(後述の図7において同様)。ハンド先端部4がハンド本体部3に装着された状態では、ハンド先端部4の中心軸と、ハンド本体部3の中心軸J1とが一致するため、以下の説明では、ハンド先端部4の中心軸にも符号J1を付す。
【0027】
ハンド先端部4は、中心軸J1を中心とする厚い円板状の本体41を有し、本体41の下部(図6中の下側の部位)には複数の把持部5が接続される。本体41の上面411(図6中の上側の面)において中央には、中心軸J1を中心とする有底の結合穴42が形成される。後述するように、ハンド先端部4がハンド本体部3に装着された状態では、ハンド本体部3の結合部323(図3参照)が結合穴42内に挿入されて、ハンド先端部4とハンド本体部3とが結合される。また、本体41の上面411には、中心軸J1に平行に突出する円柱状の突起部43が設けられる。絶縁性材料にて形成される突起部43の外周面には、金属等の導電性材料にて導電部431が形成される。なお、突起部43の表面に絶縁性材料の膜が形成され、当該膜上に導電部431が形成されてもよい。
【0028】
本体41の上面411において結合穴42の近傍には有底の係合穴部44が中心軸J1に平行に形成され、係合穴部44の中心軸J1に垂直な断面は円である。なお、係合穴部44近傍の構造については後述する。把持部5にはワークの把持状態(すなわち、ワークを把持しているか否か)を検出する把持検出部(図示省略)が設けられる。また、上面411の外縁部には、ハンド先端部4内の伝送経路(図示省略)を介して把持検出部に接続される基板47(ハンド本体部3の伝送基板333(図3参照)に対向する基板であるため、以下、「対向基板47」という。)が設けられる。
【0029】
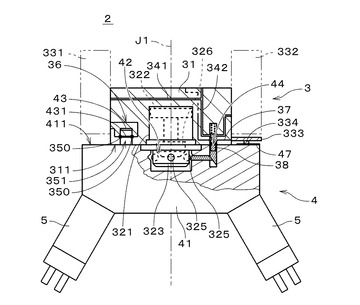
次に、ハンド先端部4をハンド本体部3に装着する際の動作について説明する。ハンド先端部4をハンド本体部3に装着する際には、図7に示すように、作業者によりハンド先端部4の結合穴42がハンド本体部3の結合部323に嵌め込まれて、ハンド先端部4の(本体41の)上面411とハンド本体部3の(本体31の)下面311とが当接する。このとき、ハンド先端部4の突起部43がハンド本体部3の第1穴部351内に挿入され、かつ、ハンド本体部3の摺動部38の先端がハンド先端部4の係合穴部44内に挿入されるように、ハンド先端部4がハンド本体部3に対して位置合わせされる。また、ハンド本体部3の伝送基板333の端子334が、ハンド先端部4の対向基板47の端子に接触する。このようにして、ハンド先端部4がハンド本体部3への装着位置に配置される。
【0030】
図8は、ハンド本体部3の摺動部38近傍、および、ハンド先端部4の係合穴部44近傍を示す図である。図8に示すように、係合穴部44内には、第1移動部材461が挿入され、第1移動部材461の下側(図8中の下側)の端面は傾斜面461aとなっている。また、ハンド先端部4の本体41において、係合穴部44と結合穴42との間には中心軸J1(図7参照)に垂直な方向に伸びる貫通孔45が形成されており、貫通孔45内には第2移動部材462が挿入される。第2移動部材462の係合穴部44側の端面は、第1移動部材461の傾斜面461aと当接する傾斜面462aであり、結合穴42側の端面は結合穴42側に突出して、1つの結合用ボール325に対向する。
【0031】
ハンド先端部4がハンド本体部3への装着位置に配置された直後では、結合用ボール325の大部分(およそ全体)が結合部323の外周面よりも内側に位置する。また、摺動部38が付勢部39により下面311側へと付勢されている(すなわち、摺動部38が遮断位置に位置する)ことにより、摺動部38の先端が第1移動部材461を下方に押し下げるとともに、傾斜面461a,462aを介して第2移動部材462が結合穴42側へと押し込まれる。
【0032】
一方で、図7に示すように、ハンド先端部4の突起部43がハンド本体部3の第1穴部351内に挿入されることにより、第1穴部351内において、電気的回路36の2つの端子350が導電部431に接触し、2つの端子350間が電気的に接続する。すなわち、ハンド先端部4の突起部43が第1穴部351内の2つの端子350と接触することにより、第1穴部351による電気的回路36の遮断が解除される。
【0033】
続いて、図4の電気的回路36において、作業者がトリガ部362をONにすることにより、電源部361から電磁弁331に電力が供給され、電磁弁331がON状態となる。これにより、電磁弁331から図7のシリンダ部321内に圧縮エアが供給され、ピストン部322が図7中の下方へと移動する。そして、押出部326により各結合用ボール325が外側へと押し出され、図9に示すように、結合用ボール325の一部が結合部323の外周面から突出する。結合用ボール325は、結合穴42の側面に形成された溝部421内に嵌り込み、ハンド先端部4とハンド本体部3とが結合される。
【0034】
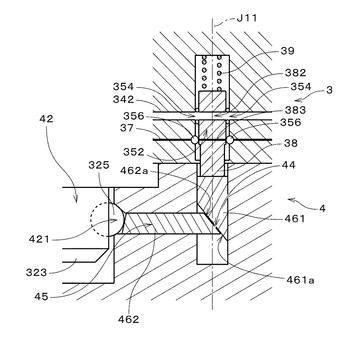
このとき、図9に示す結合用ボール325により、第2移動部材462が係合穴部44側に押し込まれる。また、第2移動部材462により傾斜面462a,461aを介して第1移動部材461が上方へと押し出される。そして、第1移動部材461が付勢部39に抗して摺動部38を上方へと押すことにより、摺動部38が第2穴部352の中心軸J11に沿って一定距離だけ移動する。これにより、摺動部38の貫通孔382が第2穴部352の開口354の位置に配置され、伝送部383が端子356に接触する。すなわち、摺動部38が接続位置に位置し、第2穴部352内において、第2流体流路342の2つの開口354が貫通孔382を介して空間的に連通し、伝送経路37の2つの端子356が伝送部383を介して電気的に接続する。このように、ハンド先端部4の第1移動部材461により直接的に押されて摺動部38が接続位置に位置することにより、第2流体流路342および伝送経路37のそれぞれが摺動部38を介して接続される。以上の動作により、ハンド先端部4のハンド本体部3への装着が完了する。
【0035】
図7に示すハンド先端部4では、第2流体流路342を介して複数の電磁弁332に圧縮エアが供給されることにより、各電磁弁332に接続された把持部5の駆動が可能となる。また、把持部5におけるワークの把持状態を示す信号が、ハンド先端部4内の伝送経路、対向基板47、伝送基板333およびハンド本体部3内の伝送経路37を介して制御部12(図1参照)へと伝送される。制御部12では、把持部5からの当該信号を参照しつつ電磁弁332のON/OFFを制御することにより、把持部5にてワークの把持および解放が行われる。なお、電磁弁332と把持部5との間の圧縮エアの流路、および、ハンド先端部4内の伝送経路の図示は省略している。
【0036】
ハンド先端部4をハンド本体部3から離脱する際には、図4の電気的回路36において、作業者がトリガ部362をOFFにすることにより、電磁弁331がOFF状態となる。これにより、電磁弁331から図7のシリンダ部321内への圧縮エアの供給が停止されるとともにシリンダ部321内が大気圧に戻され、内部のバネの作用によりピストン部322が押出部326と共に図7中の上方へと移動する。その結果、結合用ボール325の外側への押し出しが解除され、ハンド先端部4とハンド本体部3との結合が解除される。また、付勢部39の付勢により摺動部38が図9に示す接続位置から図8に示す遮断位置へと移動し、第2流体流路342が摺動部38により遮断され、伝送経路37も電気的に遮断される。摺動部38の移動により第1移動部材461が下方に押し下げられ、第2移動部材462が結合穴42側へと押し込まれる。そして、ハンド先端部4がハンド本体部3から取り外され、ハンド本体部3からのハンド先端部4の離脱が完了する。ハンド先端部4の取り外しにより、電気的回路36が第1穴部351にて遮断される(図3参照)。
【0037】
ここで、図3のハンド本体部3において第2穴部352が存在しないロボットハンドを比較例として想定する。このような比較例のロボットハンドでは、ハンド先端部4の非装着時に第2流体流路342および伝送経路37のそれぞれが遮断されず、また、ハンド先端部4の非装着により電磁弁332からハンド先端部4へと向かう流路が開放された状態になるため、次にハンド先端部4を装着するまで、当該流路において圧縮エアが漏れてしまう。なお、把持部5には複動型のエアシリンダが用いられるため、当該エアシリンダに接続される2つの電磁弁332の一方は必ずON状態となっている。また、ハンド先端部4の非装着時において、伝送基板333はハンド本体部3の表面に露出した状態となるため、上記比較例のロボットハンドでは、何らかの部材が伝送基板333に接触して短絡すると、伝送経路37に接続された制御部12が損傷する可能性があり、作業者において感電の虞もある。
【0038】
これに対し、図7のロボットハンド2のハンド本体部3では、把持部5の駆動用の圧縮エアが流れる第2流体流路342の一部が摺動部38に形成され、把持部5におけるワークの把持状態を示す信号の伝送経路37の一部が摺動部38に設けられる。そして、ハンド先端部4の非装着時に、摺動部38が付勢部39に付勢されて遮断位置に位置することにより、第2流体流路342および伝送経路37のそれぞれが遮断され、ハンド先端部4の装着時に、ハンド先端部4により直接的に押されて摺動部38が接続位置に位置することにより、第2流体流路342および伝送経路37のそれぞれが摺動部38を介して接続される。これにより、簡単な構造でハンド先端部4の非装着時に第2流体流路342および伝送経路37を遮断することができる。その結果、ハンド先端部4の非装着時に圧縮エアの漏れ、あるいは、伝送経路37の短絡や、これによる制御部12の損傷等を防止することができる。また、伝送経路37の切断箇所が第2穴部352内に配置され、ハンド本体部3の表面に露出しないため、当該切断箇所における短絡がより確実に防止される。
【0039】
実際の自動組立ライン等では多品種少量生産に対応するために、ロボットハンド2において様々な種類のハンド先端部が準備され、生産する組立体に合わせて取り替えられる。この場合に、例えば、把持部が設けられないハンド先端部をハンド本体部3に装着することもあり、このようなハンド先端部に対して、ハンド本体部3内における第2流体流路342および伝送経路37が接続される必要はない。
【0040】
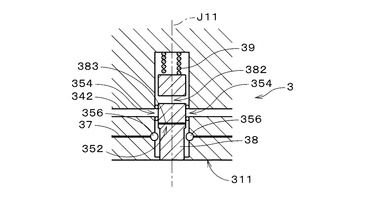
そこで、ロボットハンド2では、把持部が設けられないハンド先端部に係合穴部44を設けないことにより、このようなハンド先端部をハンド本体部3に取り付けた場合に、図10に示すように、摺動部38の先端がハンド本体部3の下面311の位置となるまで、摺動部38が上方に押し込まれる。その結果、摺動部38の貫通孔382が開口354よりも上方に配置されて、各開口354が摺動部38の他の部位により閉塞され、摺動部38の伝送部383が端子356よりも上方に配置され、2つの端子356間が遮断される。
【0041】
以上のように、ロボットハンド2では、摺動部38が遮断位置から接続位置を通り過ぎた位置まで移動した場合に、第2流体流路342および伝送経路37のそれぞれが遮断される。このように、第2穴部352内にて、いわゆる3ポジション型のスイッチが構成されることにより、第2流体流路342および伝送経路37のそれぞれが誤って接続されることをより確実に防止することができる。
【0042】
また、ロボットハンド2のハンド本体部3では、結合機構32の駆動用の電気的回路36を遮断する第1穴部351が回路遮断部として設けられ、ハンド先端部4をハンド本体部3への装着位置に配置した際に、ハンド先端部4が第1穴部351と接触することにより、第1穴部351による電気的回路36の遮断が解除される。したがって、仮に誤ったハンド先端部が装着位置に配置された場合には、結合機構32が駆動せず、ハンド先端部がハンド本体部3に結合されないため、ハンド先端部の誤装着を確実に防止することができる。
【0043】
さらに、ロボットハンド2では、結合機構32の駆動により、ハンド先端部4が有する第1移動部材461が移動し、第1移動部材461が摺動部38を押すことにより摺動部38が接続位置に配置される。これにより、不適切なハンド先端部が装着位置に配置され、万一、結合が行われたとしても、摺動部38が接続位置に配置されないため、ハンド先端部の駆動が不能となる。その結果、ハンド先端部の誤装着に容易に気付くことが可能となる。
【0044】
以上、本発明の実施の形態について説明してきたが、本発明は上記実施の形態に限定されるものではなく、様々な変形が可能である。
【0045】
ロボットハンド2の設計によっては、図5の摺動部38において貫通孔382のみが形成され、伝送部383が省略されてもよい。このようなハンド本体部では、ハンド先端部の非装着時に、摺動部38が付勢部39に付勢されて遮断位置に位置することにより、流体流路が遮断され、ハンド先端部の装着時に、ハンド先端部により押されて摺動部38が接続位置に位置することにより、流体流路が摺動部38を介して接続される。また、摺動部38が遮断位置から接続位置を通り過ぎた位置まで移動した場合に、流体流路が遮断されることにより、流体流路が誤って接続されることをより確実に防止することができる。
【0046】
ハンド先端部4の非装着時に流体流路および伝送経路のそれぞれを遮断し、ハンド先端部4の装着時に流体流路および伝送経路のそれぞれを接続するロボットハンド2では、摺動部の可動範囲の一端が接続位置とされ、いわゆる2ポジション型のスイッチが構成されてもよい。ただし、図10を参照して説明したように、3ポジション型のスイッチを構成することにより、流体流路および伝送経路のそれぞれが誤って接続されることをより確実に防止することができる。
【0047】
ロボットハンドでは、ハンド先端部4とハンド本体部3との間に他の部材を介在させ、ハンド先端部4の装着時に、当該部材により摺動部38が押されて、流体流路および伝送経路のそれぞれを接続する接続位置に摺動部38が配置されてもよい。このようなロボットハンドでは、摺動部38がハンド先端部4により間接的に押されて接続位置に位置すると捉えることができる。
【0048】
図3のハンド本体部3において、第2穴部352の配置は本体31の下面311に限定されず、例えば、本体31の側面に第2穴部が設けられてもよい。この場合、当該第2穴部内の摺動部38を押し込むための部材がハンド先端部に設けられ、ハンド先端部の装着時に、摺動部38が当該部材により押されて接続位置に配置される。
【0049】
ロボットハンド2では、摺動部38の先端に磁石が設けられるとともに、摺動部38に対向するハンド先端部4上の位置にも磁石が配置され、これらの磁石間の磁気的な斥力により、摺動部38が接続位置に配置されてもよい。また、上記磁石間の磁気的な引力により摺動部38が接続位置に配置される場合には、摺動部38を上方に付勢する引張バネが付勢部39として設けられる。付勢部39としてバネ以外の弾性部材が用いられてもよく、さらに、第2穴部352の底面および摺動部38に磁石を設けることにより、摺動部38が磁気的に付勢されてもよい。このように、摺動部38を第2穴部352の中心軸J11に沿う一の方向へと付勢する付勢部は様々な態様にて実現されてよい。
【0050】
摺動部38の外周面において中心軸J11を中心とする周方向に沿う溝部が形成され、摺動部38が接続位置に配置された際に、当該溝部を介して流体流路が接続されてもよい。同様に、摺動部38の外周面に伝送部が設けられてもよい。以上のように、摺動部38に形成される流体流路の一部、および、摺動部38に設けられる伝送経路の一部は、摺動部38の内部以外に配置されてもよい。
【0051】
図3のハンド本体部3では、連結用の電磁弁331に接続される第1流体流路341と、把持部5の駆動用の電磁弁332に接続される第2流体流路342とが連通するが、ロボットハンド2の設計によっては、これらの流路が個別に設けられて圧縮エア供給源に接続されてもよい。また、電磁弁331,332は必ずしもハンド本体部3上に設けられる必要はなく、ハンド本体部3に近接した他の位置に設けられてもよい。
【0052】
流体流路を流れる把持部駆動用の流体は、圧縮エア以外に水や油等であってもよい。また、把持部におけるワークの把持状態を示す信号が伝送される伝送経路37は、電気信号を伝送する導電線以外に、光信号を伝送する光伝送線等であってもよい。
【0053】
ハンド本体部3の第1穴部351において、第2穴部352と同様の構成が用いられてもよい(ただし、摺動部における貫通孔382は不要である。)。この場合、ハンド先端部4をハンド本体部3への装着位置に配置した際に、ハンド先端部4が第1穴部351内の摺動部と接触して摺動部が第1穴部351の中心軸に沿って移動し、摺動部に設けられた伝送部が2つの端子350と接続して、第1穴部351による電気的回路36の遮断が解除される。
【0054】
図1の組立ロボット1では、ロボットアーム11に取り付けられたハンド本体部3に対してハンド先端部4が着脱自在とされるが、ロボットアーム11の先端が図3のハンド本体部3と同様の構成とされて、当該先端にハンド先端部4が着脱自在にて直接取り付けられてもよく、この場合、ロボットアーム11、または、その先端がロボットハンドにおける本体部と捉えることができる。
【0055】
上記実施の形態および各変形例における構成は、相互に矛盾しない限り適宜組み合わせられてよい。
【符号の説明】
【0056】
2 ロボットハンド
3 ハンド本体部
4 ハンド先端部
5 把持部
32 結合機構
36 電気的回路
37 伝送経路
38 摺動部
39 付勢部
342 第2流体流路
351 第1穴部
352 第2穴部
382 貫通孔
383 伝送部
461 第1移動部材
J11 (第2穴部の)中心軸
【技術分野】
【0001】
本発明は、ワークを把持するロボットハンドに関する。
【背景技術】
【0002】
従来より、自動組立ライン等において組立ロボットが用いられており、組立ロボットでは、ワークを把持するロボットハンドがロボットアームに接続されることにより、ロボットハンドが3次元的に移動可能とされる。ロボットハンドでは、圧縮エアを用いた把持部の駆動により、ワークの把持および解放が行われる。また、各種ワークに対応するために、把持部を有する先端部と、ロボットアームに接続された本体部とが着脱自在とされるロボットハンドも知られており、このようなロボットハンドでは、先端部を離脱した際に、圧縮エアが漏れ出すことを避けるため、本体部における圧縮エアの流路も遮断されることが好ましい。
【0003】
特許文献1では、ロボットアームに各種ツール等を着脱するためのロボットアームカップリング装置が開示されており、当該装置では、ツール側アタッチメントをアーム側アタッチメントに対して装着または離脱した際に、アーム側アタッチメントにおける圧縮エアの流路も接続または遮断される。具体的には、アーム側アタッチメントの本体にアーム側流体通路と連通する装着孔が設けられ、装着孔内では、開閉ボールが圧縮バネにより装着孔の吐出口を閉鎖するように付勢される。ツール側アタッチメントをアーム側アタッチメントに連結すると、ツール側アタッチメントの接続口部の先端部が装着孔内に挿嵌して進入し、開閉ボールが圧縮バネの弾性力に抗して押圧され、これにより、アーム側流体通路内に供給される圧縮エアがツールに供給される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−23050号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、ロボットハンドの先端部では、把持部におけるワークの把持状態を示す信号が取得されることがあり、先端部からの当該信号を伝送する伝送経路が本体部にも設けられる。この場合、予期しない不具合が生じることがある。
【0006】
また、特許文献1の装置では、装着孔内の開閉ボールを押圧するのみで、圧縮エアの流路が簡単に開放されてしまうため、圧縮エアの流路が誤って開放される虞がある。
【0007】
本発明は上記課題に鑑みなされたものであり、ロボットハンドにおいて、簡単な構造で先端部の非装着時に流体流路および伝送経路を遮断することを目的としており、流体流路が誤って接続されることをより確実に防止することも目的としている。
【課題を解決するための手段】
【0008】
請求項1に記載の発明は、ロボットハンドであって、本体部と、前記本体部に着脱自在に装着されるとともに、ワークを把持する把持部を有する先端部とを備え、前記本体部が、穴部と、前記穴部の中心軸に沿って前記穴部内を摺動する摺動部と、前記中心軸に沿う一の方向へと前記摺動部を付勢する付勢部と、前記把持部の駆動用の流体が流れる流体流路と、前記把持部におけるワークの把持状態を示す信号が伝送される伝送経路とを備え、前記流体流路の一部が前記摺動部に形成され、前記伝送経路の一部が前記摺動部に設けられ、前記先端部の非装着時に、前記摺動部が前記付勢部に付勢されて遮断位置に位置することにより、前記流体流路および前記伝送経路のそれぞれが遮断され、前記先端部の装着時に、前記先端部により直接的または間接的に押されて前記摺動部が接続位置に位置することにより、前記流体流路および前記伝送経路のそれぞれが前記摺動部を介して接続される。
【0009】
請求項2に記載の発明は、請求項1に記載のロボットハンドであって、前記摺動部が前記遮断位置から前記接続位置を通り過ぎた位置まで移動した場合に、前記流体流路および前記伝送経路のそれぞれが遮断される。
【0010】
請求項3に記載の発明は、請求項1または2に記載のロボットハンドであって、前記本体部が、前記先端部と結合する結合機構と、前記結合機構の駆動用の電気的回路と、前記電気的回路を遮断する回路遮断部とをさらに備え、前記先端部を前記本体部への装着位置に配置した際に、前記先端部が前記回路遮断部と接触することにより、前記回路遮断部による前記電気的回路の遮断が解除される。
【0011】
請求項4に記載の発明は、請求項3に記載のロボットハンドであって、前記結合機構の駆動により、前記先端部が有する移動部材が移動し、前記移動部材が前記摺動部を押すことにより前記摺動部が前記接続位置に配置される。
【0012】
請求項5に記載の発明は、ロボットハンドであって、本体部と、前記本体部に着脱自在に装着されるとともに、ワークを把持する把持部を有する先端部とを備え、前記本体部が、穴部と、前記穴部の中心軸に沿って前記穴部内を摺動する摺動部と、前記中心軸に沿う一の方向へと前記摺動部を付勢する付勢部と、前記把持部の駆動用の流体が流れる流体流路とを備え、前記流体流路の一部が前記摺動部に形成され、前記先端部の非装着時に、前記摺動部が前記付勢部に付勢されて遮断位置に位置することにより、前記流体流路が遮断され、前記先端部の装着時に、前記先端部により直接的または間接的に押されて前記摺動部が接続位置に位置することにより、前記流体流路が前記摺動部を介して接続され、前記摺動部が前記遮断位置から前記接続位置を通り過ぎた位置まで移動した場合に、前記流体流路が遮断される。
【発明の効果】
【0013】
請求項1ないし4の発明では、ロボットハンドにおいて、簡単な構造で先端部の非装着時に流体流路および伝送経路を遮断することができる。
【0014】
また、請求項2の発明では、流体流路および伝送経路のそれぞれが誤って接続されることをより確実に防止することができ、請求項3の発明では、先端部の誤装着を防止することができる。
【0015】
請求項5の発明では、流体流路が誤って接続されることをより確実に防止することができる。
【図面の簡単な説明】
【0016】
【図1】組立ロボットの側面図である。
【図2】ハンド本体部の底面図である。
【図3】ハンド本体部の断面図である。
【図4】電気的回路の構成を示すブロック図である。
【図5】第2穴部近傍を拡大して示す図である。
【図6】ハンド先端部の部分断面図である。
【図7】ロボットハンドを示す図である。
【図8】摺動部および係合穴部近傍を示す図である。
【図9】摺動部および係合穴部近傍を示す図である。
【図10】摺動部の動作を説明するための図である。
【発明を実施するための形態】
【0017】
図1は、本発明の一の実施の形態に係る組立ロボット1の側面図である。組立ロボット1は、多数の部品から構成される組立体を自動的に組み立てる自動組立ライン等において用いられる産業用ロボットである。図1の組立ロボット1は、多自由度(例えば、6自由度)のロボットアーム11、ロボットアーム11の先端に着脱可能に取り付けられるロボットハンド2、および、組立ロボット1の全体制御を担う制御部12を備え、ロボットアーム11によりロボットハンド2が自在に移動可能とされる。ロボットハンド2は、ロボットアーム11に取り付けられるハンド本体部3、および、ハンド本体部3に着脱自在に装着されるハンド先端部4を備え、ハンド先端部4にはワークを把持する複数の把持部5が設けられる。
【0018】
図2は、ハンド本体部3の底面図であり、図3は図2中の矢印A−Aの位置におけるハンド本体部3の断面図である。
【0019】
ハンド本体部3は、所定の中心軸J1を中心とする厚い円板状の本体31を有し、本体31の上下方向(図3中の上下方向に対応し、重力方向であるとは限らない。後述の図5ないし図10において同様。)の下側における面311(以下、単に「下面311」という。)において、中央にはハンド先端部4と結合する結合機構32が設けられる。図3に示すように、結合機構32は、本体31の内部に設けられるシリンダ部321、シリンダ部321内にて中心軸J1方向に移動するピストン部322、および、本体31の下面311から突出する有底円筒状の結合部323を有する。シリンダ部321には、圧縮エアの流路が接続されており、当該流路に接続された後述の電磁弁331のON/OFFを制御することにより、ピストン部322が図3中の上下方向(中心軸J1方向)に移動する。
【0020】
ピストン部322には、中空の結合部323内に配置される押出部326が接続される。また、中心軸J1を中心とする結合部323の外周面には複数のボール支持孔が設けられており、各ボール支持孔内には結合用ボール325が配置されて保持される。結合機構32において、ピストン部322が図3中の下方へと移動すると、厚い円板状の押出部326の側面により結合用ボール325が中心軸J1から離れる方向(すなわち、中心軸J1を中心とする径方向の外側)へと押し出され、結合用ボール325の一部が結合部323の外周面から突出する。
【0021】
図2および図3に示すように、本体31の下面311には、有底(ただし、図3中の上側が底面となる。)の第1穴部351および第2穴部352が中心軸J1に平行に形成され、第1穴部351および第2穴部352のそれぞれでは、中心軸J1に垂直な断面は円である。図2に示すように、ハンド本体部3の本体31の側面には、電磁弁331,332および伝送基板333が固定され、伝送基板333は、図2中の右側に配置される電磁弁332の下方(図3中の下側)に配置される。なお、図3では、電磁弁331,332を二点鎖線にて示している。
【0022】
本体31の内部には、図3に示すように、外部に設けられた圧縮エア供給源91に接続される流体流路34が形成される。流体流路34は分岐しており、一方の第1流体流路341は電磁弁331(の一のポート)に接続され、他方の第2流体流路342は第2穴部352を介して複数の電磁弁332に接続される。本体31の内部には、さらに、一端が伝送基板333に接続されるとともに他端が制御部12(図1参照)に接続される伝送経路37、および、結合機構32の駆動用の電気的回路36が形成される。ハンド先端部4がハンド本体部3に装着されていない状態(すなわち、ハンド先端部4がハンド本体部3から離脱された状態)では、伝送経路37の一部は第2穴部352により遮断され、電気的回路36の一部も第1穴部351により遮断される。このように、第2穴部352は伝送経路37を遮断する経路遮断部であり、第1穴部351は電気的回路36を遮断する回路遮断部である。第1穴部351の側面には、電気的回路36の2つの端子350が形成される。
【0023】
図4は、電気的回路36の構成を示すブロック図である。電気的回路36は、電磁弁331に接続されて電磁弁331のON/OFFを制御するものであり、電気的回路36には、電源部361およびトリガ部362、並びに、回路遮断部である第1穴部351が設けられる。電気的回路36の動作については後述する。
【0024】
図5は、図3の第2穴部352近傍を拡大して示す図である。第2穴部352内には、略円柱状の摺動部38が挿入される。摺動部38の上部の直径は第2穴部352の直径よりも僅かに小さく、後述するように、摺動部38は第2穴部352の中心軸J11に沿って第2穴部352内を摺動する。摺動部38では、下部の直径が上部の直径よりも小さく、中心軸J11方向の中央近傍において、下方を向く環状面381が形成される。また、第2穴部352の開口縁には内側に突出する環状突出部353が設けられる。摺動部38と第2穴部352の底面との間には圧縮バネである付勢部39が設けられ、付勢部39により摺動部38が中心軸J11に沿って下方へと付勢される。これにより、摺動部38の環状面381が環状突出部353に当接し、摺動部38の先端(下端)が本体31の下面311から突出する。以下、環状面381が環状突出部353に当接する摺動部38の位置を「遮断位置」という。
【0025】
摺動部38内には図5中の左右方向に伸びる貫通孔382、および、導電性材料にて形成された伝送部383が形成される。なお、摺動部38自体は絶縁性材料にて形成される。既述のように、本体31内の第2流体流路342は、第2穴部352を経由しており、第2穴部352の側面には、第2流体流路342の2つの開口354が形成される。各開口354の周囲には環状のパッキン355が設けられる。また、伝送経路37は第2穴部352により遮断されており、第2穴部352の側面には、伝送経路37の2つの端子356が形成される。図5に示すように、摺動部38の環状面381が環状突出部353に当接した状態(すなわち、遮断位置)では、摺動部38の貫通孔382が開口354よりも下方に配置されて、各開口354が摺動部38の他の部位により閉塞される。また、摺動部38の伝送部383が端子356よりも下方に配置され、2つの端子356間が摺動部38の他の部位により電気的に遮断される。
【0026】
図6は、ハンド先端部4の部分断面図であり、中心軸J1を含む面にて切断した断面を部分的に示している(後述の図7において同様)。ハンド先端部4がハンド本体部3に装着された状態では、ハンド先端部4の中心軸と、ハンド本体部3の中心軸J1とが一致するため、以下の説明では、ハンド先端部4の中心軸にも符号J1を付す。
【0027】
ハンド先端部4は、中心軸J1を中心とする厚い円板状の本体41を有し、本体41の下部(図6中の下側の部位)には複数の把持部5が接続される。本体41の上面411(図6中の上側の面)において中央には、中心軸J1を中心とする有底の結合穴42が形成される。後述するように、ハンド先端部4がハンド本体部3に装着された状態では、ハンド本体部3の結合部323(図3参照)が結合穴42内に挿入されて、ハンド先端部4とハンド本体部3とが結合される。また、本体41の上面411には、中心軸J1に平行に突出する円柱状の突起部43が設けられる。絶縁性材料にて形成される突起部43の外周面には、金属等の導電性材料にて導電部431が形成される。なお、突起部43の表面に絶縁性材料の膜が形成され、当該膜上に導電部431が形成されてもよい。
【0028】
本体41の上面411において結合穴42の近傍には有底の係合穴部44が中心軸J1に平行に形成され、係合穴部44の中心軸J1に垂直な断面は円である。なお、係合穴部44近傍の構造については後述する。把持部5にはワークの把持状態(すなわち、ワークを把持しているか否か)を検出する把持検出部(図示省略)が設けられる。また、上面411の外縁部には、ハンド先端部4内の伝送経路(図示省略)を介して把持検出部に接続される基板47(ハンド本体部3の伝送基板333(図3参照)に対向する基板であるため、以下、「対向基板47」という。)が設けられる。
【0029】
次に、ハンド先端部4をハンド本体部3に装着する際の動作について説明する。ハンド先端部4をハンド本体部3に装着する際には、図7に示すように、作業者によりハンド先端部4の結合穴42がハンド本体部3の結合部323に嵌め込まれて、ハンド先端部4の(本体41の)上面411とハンド本体部3の(本体31の)下面311とが当接する。このとき、ハンド先端部4の突起部43がハンド本体部3の第1穴部351内に挿入され、かつ、ハンド本体部3の摺動部38の先端がハンド先端部4の係合穴部44内に挿入されるように、ハンド先端部4がハンド本体部3に対して位置合わせされる。また、ハンド本体部3の伝送基板333の端子334が、ハンド先端部4の対向基板47の端子に接触する。このようにして、ハンド先端部4がハンド本体部3への装着位置に配置される。
【0030】
図8は、ハンド本体部3の摺動部38近傍、および、ハンド先端部4の係合穴部44近傍を示す図である。図8に示すように、係合穴部44内には、第1移動部材461が挿入され、第1移動部材461の下側(図8中の下側)の端面は傾斜面461aとなっている。また、ハンド先端部4の本体41において、係合穴部44と結合穴42との間には中心軸J1(図7参照)に垂直な方向に伸びる貫通孔45が形成されており、貫通孔45内には第2移動部材462が挿入される。第2移動部材462の係合穴部44側の端面は、第1移動部材461の傾斜面461aと当接する傾斜面462aであり、結合穴42側の端面は結合穴42側に突出して、1つの結合用ボール325に対向する。
【0031】
ハンド先端部4がハンド本体部3への装着位置に配置された直後では、結合用ボール325の大部分(およそ全体)が結合部323の外周面よりも内側に位置する。また、摺動部38が付勢部39により下面311側へと付勢されている(すなわち、摺動部38が遮断位置に位置する)ことにより、摺動部38の先端が第1移動部材461を下方に押し下げるとともに、傾斜面461a,462aを介して第2移動部材462が結合穴42側へと押し込まれる。
【0032】
一方で、図7に示すように、ハンド先端部4の突起部43がハンド本体部3の第1穴部351内に挿入されることにより、第1穴部351内において、電気的回路36の2つの端子350が導電部431に接触し、2つの端子350間が電気的に接続する。すなわち、ハンド先端部4の突起部43が第1穴部351内の2つの端子350と接触することにより、第1穴部351による電気的回路36の遮断が解除される。
【0033】
続いて、図4の電気的回路36において、作業者がトリガ部362をONにすることにより、電源部361から電磁弁331に電力が供給され、電磁弁331がON状態となる。これにより、電磁弁331から図7のシリンダ部321内に圧縮エアが供給され、ピストン部322が図7中の下方へと移動する。そして、押出部326により各結合用ボール325が外側へと押し出され、図9に示すように、結合用ボール325の一部が結合部323の外周面から突出する。結合用ボール325は、結合穴42の側面に形成された溝部421内に嵌り込み、ハンド先端部4とハンド本体部3とが結合される。
【0034】
このとき、図9に示す結合用ボール325により、第2移動部材462が係合穴部44側に押し込まれる。また、第2移動部材462により傾斜面462a,461aを介して第1移動部材461が上方へと押し出される。そして、第1移動部材461が付勢部39に抗して摺動部38を上方へと押すことにより、摺動部38が第2穴部352の中心軸J11に沿って一定距離だけ移動する。これにより、摺動部38の貫通孔382が第2穴部352の開口354の位置に配置され、伝送部383が端子356に接触する。すなわち、摺動部38が接続位置に位置し、第2穴部352内において、第2流体流路342の2つの開口354が貫通孔382を介して空間的に連通し、伝送経路37の2つの端子356が伝送部383を介して電気的に接続する。このように、ハンド先端部4の第1移動部材461により直接的に押されて摺動部38が接続位置に位置することにより、第2流体流路342および伝送経路37のそれぞれが摺動部38を介して接続される。以上の動作により、ハンド先端部4のハンド本体部3への装着が完了する。
【0035】
図7に示すハンド先端部4では、第2流体流路342を介して複数の電磁弁332に圧縮エアが供給されることにより、各電磁弁332に接続された把持部5の駆動が可能となる。また、把持部5におけるワークの把持状態を示す信号が、ハンド先端部4内の伝送経路、対向基板47、伝送基板333およびハンド本体部3内の伝送経路37を介して制御部12(図1参照)へと伝送される。制御部12では、把持部5からの当該信号を参照しつつ電磁弁332のON/OFFを制御することにより、把持部5にてワークの把持および解放が行われる。なお、電磁弁332と把持部5との間の圧縮エアの流路、および、ハンド先端部4内の伝送経路の図示は省略している。
【0036】
ハンド先端部4をハンド本体部3から離脱する際には、図4の電気的回路36において、作業者がトリガ部362をOFFにすることにより、電磁弁331がOFF状態となる。これにより、電磁弁331から図7のシリンダ部321内への圧縮エアの供給が停止されるとともにシリンダ部321内が大気圧に戻され、内部のバネの作用によりピストン部322が押出部326と共に図7中の上方へと移動する。その結果、結合用ボール325の外側への押し出しが解除され、ハンド先端部4とハンド本体部3との結合が解除される。また、付勢部39の付勢により摺動部38が図9に示す接続位置から図8に示す遮断位置へと移動し、第2流体流路342が摺動部38により遮断され、伝送経路37も電気的に遮断される。摺動部38の移動により第1移動部材461が下方に押し下げられ、第2移動部材462が結合穴42側へと押し込まれる。そして、ハンド先端部4がハンド本体部3から取り外され、ハンド本体部3からのハンド先端部4の離脱が完了する。ハンド先端部4の取り外しにより、電気的回路36が第1穴部351にて遮断される(図3参照)。
【0037】
ここで、図3のハンド本体部3において第2穴部352が存在しないロボットハンドを比較例として想定する。このような比較例のロボットハンドでは、ハンド先端部4の非装着時に第2流体流路342および伝送経路37のそれぞれが遮断されず、また、ハンド先端部4の非装着により電磁弁332からハンド先端部4へと向かう流路が開放された状態になるため、次にハンド先端部4を装着するまで、当該流路において圧縮エアが漏れてしまう。なお、把持部5には複動型のエアシリンダが用いられるため、当該エアシリンダに接続される2つの電磁弁332の一方は必ずON状態となっている。また、ハンド先端部4の非装着時において、伝送基板333はハンド本体部3の表面に露出した状態となるため、上記比較例のロボットハンドでは、何らかの部材が伝送基板333に接触して短絡すると、伝送経路37に接続された制御部12が損傷する可能性があり、作業者において感電の虞もある。
【0038】
これに対し、図7のロボットハンド2のハンド本体部3では、把持部5の駆動用の圧縮エアが流れる第2流体流路342の一部が摺動部38に形成され、把持部5におけるワークの把持状態を示す信号の伝送経路37の一部が摺動部38に設けられる。そして、ハンド先端部4の非装着時に、摺動部38が付勢部39に付勢されて遮断位置に位置することにより、第2流体流路342および伝送経路37のそれぞれが遮断され、ハンド先端部4の装着時に、ハンド先端部4により直接的に押されて摺動部38が接続位置に位置することにより、第2流体流路342および伝送経路37のそれぞれが摺動部38を介して接続される。これにより、簡単な構造でハンド先端部4の非装着時に第2流体流路342および伝送経路37を遮断することができる。その結果、ハンド先端部4の非装着時に圧縮エアの漏れ、あるいは、伝送経路37の短絡や、これによる制御部12の損傷等を防止することができる。また、伝送経路37の切断箇所が第2穴部352内に配置され、ハンド本体部3の表面に露出しないため、当該切断箇所における短絡がより確実に防止される。
【0039】
実際の自動組立ライン等では多品種少量生産に対応するために、ロボットハンド2において様々な種類のハンド先端部が準備され、生産する組立体に合わせて取り替えられる。この場合に、例えば、把持部が設けられないハンド先端部をハンド本体部3に装着することもあり、このようなハンド先端部に対して、ハンド本体部3内における第2流体流路342および伝送経路37が接続される必要はない。
【0040】
そこで、ロボットハンド2では、把持部が設けられないハンド先端部に係合穴部44を設けないことにより、このようなハンド先端部をハンド本体部3に取り付けた場合に、図10に示すように、摺動部38の先端がハンド本体部3の下面311の位置となるまで、摺動部38が上方に押し込まれる。その結果、摺動部38の貫通孔382が開口354よりも上方に配置されて、各開口354が摺動部38の他の部位により閉塞され、摺動部38の伝送部383が端子356よりも上方に配置され、2つの端子356間が遮断される。
【0041】
以上のように、ロボットハンド2では、摺動部38が遮断位置から接続位置を通り過ぎた位置まで移動した場合に、第2流体流路342および伝送経路37のそれぞれが遮断される。このように、第2穴部352内にて、いわゆる3ポジション型のスイッチが構成されることにより、第2流体流路342および伝送経路37のそれぞれが誤って接続されることをより確実に防止することができる。
【0042】
また、ロボットハンド2のハンド本体部3では、結合機構32の駆動用の電気的回路36を遮断する第1穴部351が回路遮断部として設けられ、ハンド先端部4をハンド本体部3への装着位置に配置した際に、ハンド先端部4が第1穴部351と接触することにより、第1穴部351による電気的回路36の遮断が解除される。したがって、仮に誤ったハンド先端部が装着位置に配置された場合には、結合機構32が駆動せず、ハンド先端部がハンド本体部3に結合されないため、ハンド先端部の誤装着を確実に防止することができる。
【0043】
さらに、ロボットハンド2では、結合機構32の駆動により、ハンド先端部4が有する第1移動部材461が移動し、第1移動部材461が摺動部38を押すことにより摺動部38が接続位置に配置される。これにより、不適切なハンド先端部が装着位置に配置され、万一、結合が行われたとしても、摺動部38が接続位置に配置されないため、ハンド先端部の駆動が不能となる。その結果、ハンド先端部の誤装着に容易に気付くことが可能となる。
【0044】
以上、本発明の実施の形態について説明してきたが、本発明は上記実施の形態に限定されるものではなく、様々な変形が可能である。
【0045】
ロボットハンド2の設計によっては、図5の摺動部38において貫通孔382のみが形成され、伝送部383が省略されてもよい。このようなハンド本体部では、ハンド先端部の非装着時に、摺動部38が付勢部39に付勢されて遮断位置に位置することにより、流体流路が遮断され、ハンド先端部の装着時に、ハンド先端部により押されて摺動部38が接続位置に位置することにより、流体流路が摺動部38を介して接続される。また、摺動部38が遮断位置から接続位置を通り過ぎた位置まで移動した場合に、流体流路が遮断されることにより、流体流路が誤って接続されることをより確実に防止することができる。
【0046】
ハンド先端部4の非装着時に流体流路および伝送経路のそれぞれを遮断し、ハンド先端部4の装着時に流体流路および伝送経路のそれぞれを接続するロボットハンド2では、摺動部の可動範囲の一端が接続位置とされ、いわゆる2ポジション型のスイッチが構成されてもよい。ただし、図10を参照して説明したように、3ポジション型のスイッチを構成することにより、流体流路および伝送経路のそれぞれが誤って接続されることをより確実に防止することができる。
【0047】
ロボットハンドでは、ハンド先端部4とハンド本体部3との間に他の部材を介在させ、ハンド先端部4の装着時に、当該部材により摺動部38が押されて、流体流路および伝送経路のそれぞれを接続する接続位置に摺動部38が配置されてもよい。このようなロボットハンドでは、摺動部38がハンド先端部4により間接的に押されて接続位置に位置すると捉えることができる。
【0048】
図3のハンド本体部3において、第2穴部352の配置は本体31の下面311に限定されず、例えば、本体31の側面に第2穴部が設けられてもよい。この場合、当該第2穴部内の摺動部38を押し込むための部材がハンド先端部に設けられ、ハンド先端部の装着時に、摺動部38が当該部材により押されて接続位置に配置される。
【0049】
ロボットハンド2では、摺動部38の先端に磁石が設けられるとともに、摺動部38に対向するハンド先端部4上の位置にも磁石が配置され、これらの磁石間の磁気的な斥力により、摺動部38が接続位置に配置されてもよい。また、上記磁石間の磁気的な引力により摺動部38が接続位置に配置される場合には、摺動部38を上方に付勢する引張バネが付勢部39として設けられる。付勢部39としてバネ以外の弾性部材が用いられてもよく、さらに、第2穴部352の底面および摺動部38に磁石を設けることにより、摺動部38が磁気的に付勢されてもよい。このように、摺動部38を第2穴部352の中心軸J11に沿う一の方向へと付勢する付勢部は様々な態様にて実現されてよい。
【0050】
摺動部38の外周面において中心軸J11を中心とする周方向に沿う溝部が形成され、摺動部38が接続位置に配置された際に、当該溝部を介して流体流路が接続されてもよい。同様に、摺動部38の外周面に伝送部が設けられてもよい。以上のように、摺動部38に形成される流体流路の一部、および、摺動部38に設けられる伝送経路の一部は、摺動部38の内部以外に配置されてもよい。
【0051】
図3のハンド本体部3では、連結用の電磁弁331に接続される第1流体流路341と、把持部5の駆動用の電磁弁332に接続される第2流体流路342とが連通するが、ロボットハンド2の設計によっては、これらの流路が個別に設けられて圧縮エア供給源に接続されてもよい。また、電磁弁331,332は必ずしもハンド本体部3上に設けられる必要はなく、ハンド本体部3に近接した他の位置に設けられてもよい。
【0052】
流体流路を流れる把持部駆動用の流体は、圧縮エア以外に水や油等であってもよい。また、把持部におけるワークの把持状態を示す信号が伝送される伝送経路37は、電気信号を伝送する導電線以外に、光信号を伝送する光伝送線等であってもよい。
【0053】
ハンド本体部3の第1穴部351において、第2穴部352と同様の構成が用いられてもよい(ただし、摺動部における貫通孔382は不要である。)。この場合、ハンド先端部4をハンド本体部3への装着位置に配置した際に、ハンド先端部4が第1穴部351内の摺動部と接触して摺動部が第1穴部351の中心軸に沿って移動し、摺動部に設けられた伝送部が2つの端子350と接続して、第1穴部351による電気的回路36の遮断が解除される。
【0054】
図1の組立ロボット1では、ロボットアーム11に取り付けられたハンド本体部3に対してハンド先端部4が着脱自在とされるが、ロボットアーム11の先端が図3のハンド本体部3と同様の構成とされて、当該先端にハンド先端部4が着脱自在にて直接取り付けられてもよく、この場合、ロボットアーム11、または、その先端がロボットハンドにおける本体部と捉えることができる。
【0055】
上記実施の形態および各変形例における構成は、相互に矛盾しない限り適宜組み合わせられてよい。
【符号の説明】
【0056】
2 ロボットハンド
3 ハンド本体部
4 ハンド先端部
5 把持部
32 結合機構
36 電気的回路
37 伝送経路
38 摺動部
39 付勢部
342 第2流体流路
351 第1穴部
352 第2穴部
382 貫通孔
383 伝送部
461 第1移動部材
J11 (第2穴部の)中心軸
【特許請求の範囲】
【請求項1】
ロボットハンドであって、
本体部と、
前記本体部に着脱自在に装着されるとともに、ワークを把持する把持部を有する先端部と、
を備え、
前記本体部が、
穴部と、
前記穴部の中心軸に沿って前記穴部内を摺動する摺動部と、
前記中心軸に沿う一の方向へと前記摺動部を付勢する付勢部と、
前記把持部の駆動用の流体が流れる流体流路と、
前記把持部におけるワークの把持状態を示す信号が伝送される伝送経路と、
を備え、
前記流体流路の一部が前記摺動部に形成され、前記伝送経路の一部が前記摺動部に設けられ、
前記先端部の非装着時に、前記摺動部が前記付勢部に付勢されて遮断位置に位置することにより、前記流体流路および前記伝送経路のそれぞれが遮断され、
前記先端部の装着時に、前記先端部により直接的または間接的に押されて前記摺動部が接続位置に位置することにより、前記流体流路および前記伝送経路のそれぞれが前記摺動部を介して接続されることを特徴とするロボットハンド。
【請求項2】
請求項1に記載のロボットハンドであって、
前記摺動部が前記遮断位置から前記接続位置を通り過ぎた位置まで移動した場合に、前記流体流路および前記伝送経路のそれぞれが遮断されることを特徴とするロボットハンド。
【請求項3】
請求項1または2に記載のロボットハンドであって、
前記本体部が、
前記先端部と結合する結合機構と、
前記結合機構の駆動用の電気的回路と、
前記電気的回路を遮断する回路遮断部と、
をさらに備え、
前記先端部を前記本体部への装着位置に配置した際に、前記先端部が前記回路遮断部と接触することにより、前記回路遮断部による前記電気的回路の遮断が解除されることを特徴とするロボットハンド。
【請求項4】
請求項3に記載のロボットハンドであって、
前記結合機構の駆動により、前記先端部が有する移動部材が移動し、前記移動部材が前記摺動部を押すことにより前記摺動部が前記接続位置に配置されることを特徴とするロボットハンド。
【請求項5】
ロボットハンドであって、
本体部と、
前記本体部に着脱自在に装着されるとともに、ワークを把持する把持部を有する先端部と、
を備え、
前記本体部が、
穴部と、
前記穴部の中心軸に沿って前記穴部内を摺動する摺動部と、
前記中心軸に沿う一の方向へと前記摺動部を付勢する付勢部と、
前記把持部の駆動用の流体が流れる流体流路と、
を備え、
前記流体流路の一部が前記摺動部に形成され、
前記先端部の非装着時に、前記摺動部が前記付勢部に付勢されて遮断位置に位置することにより、前記流体流路が遮断され、
前記先端部の装着時に、前記先端部により直接的または間接的に押されて前記摺動部が接続位置に位置することにより、前記流体流路が前記摺動部を介して接続され、
前記摺動部が前記遮断位置から前記接続位置を通り過ぎた位置まで移動した場合に、前記流体流路が遮断されることを特徴とするロボットハンド。
【請求項1】
ロボットハンドであって、
本体部と、
前記本体部に着脱自在に装着されるとともに、ワークを把持する把持部を有する先端部と、
を備え、
前記本体部が、
穴部と、
前記穴部の中心軸に沿って前記穴部内を摺動する摺動部と、
前記中心軸に沿う一の方向へと前記摺動部を付勢する付勢部と、
前記把持部の駆動用の流体が流れる流体流路と、
前記把持部におけるワークの把持状態を示す信号が伝送される伝送経路と、
を備え、
前記流体流路の一部が前記摺動部に形成され、前記伝送経路の一部が前記摺動部に設けられ、
前記先端部の非装着時に、前記摺動部が前記付勢部に付勢されて遮断位置に位置することにより、前記流体流路および前記伝送経路のそれぞれが遮断され、
前記先端部の装着時に、前記先端部により直接的または間接的に押されて前記摺動部が接続位置に位置することにより、前記流体流路および前記伝送経路のそれぞれが前記摺動部を介して接続されることを特徴とするロボットハンド。
【請求項2】
請求項1に記載のロボットハンドであって、
前記摺動部が前記遮断位置から前記接続位置を通り過ぎた位置まで移動した場合に、前記流体流路および前記伝送経路のそれぞれが遮断されることを特徴とするロボットハンド。
【請求項3】
請求項1または2に記載のロボットハンドであって、
前記本体部が、
前記先端部と結合する結合機構と、
前記結合機構の駆動用の電気的回路と、
前記電気的回路を遮断する回路遮断部と、
をさらに備え、
前記先端部を前記本体部への装着位置に配置した際に、前記先端部が前記回路遮断部と接触することにより、前記回路遮断部による前記電気的回路の遮断が解除されることを特徴とするロボットハンド。
【請求項4】
請求項3に記載のロボットハンドであって、
前記結合機構の駆動により、前記先端部が有する移動部材が移動し、前記移動部材が前記摺動部を押すことにより前記摺動部が前記接続位置に配置されることを特徴とするロボットハンド。
【請求項5】
ロボットハンドであって、
本体部と、
前記本体部に着脱自在に装着されるとともに、ワークを把持する把持部を有する先端部と、
を備え、
前記本体部が、
穴部と、
前記穴部の中心軸に沿って前記穴部内を摺動する摺動部と、
前記中心軸に沿う一の方向へと前記摺動部を付勢する付勢部と、
前記把持部の駆動用の流体が流れる流体流路と、
を備え、
前記流体流路の一部が前記摺動部に形成され、
前記先端部の非装着時に、前記摺動部が前記付勢部に付勢されて遮断位置に位置することにより、前記流体流路が遮断され、
前記先端部の装着時に、前記先端部により直接的または間接的に押されて前記摺動部が接続位置に位置することにより、前記流体流路が前記摺動部を介して接続され、
前記摺動部が前記遮断位置から前記接続位置を通り過ぎた位置まで移動した場合に、前記流体流路が遮断されることを特徴とするロボットハンド。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−71382(P2012−71382A)
【公開日】平成24年4月12日(2012.4.12)
【国際特許分類】
【出願番号】特願2010−218150(P2010−218150)
【出願日】平成22年9月29日(2010.9.29)
【出願人】(000000309)IDEC株式会社 (188)
【Fターム(参考)】
【公開日】平成24年4月12日(2012.4.12)
【国際特許分類】
【出願日】平成22年9月29日(2010.9.29)
【出願人】(000000309)IDEC株式会社 (188)
【Fターム(参考)】
[ Back to top ]