
ロボット制御システムおよびロボット制御方法
【課題】相互に連結された複数のロボットを容易かつ確実に制御すること。
【解決手段】複数のロボットと、かかるロボットが共有する可動軸である少なくとも1つの外部軸とを備えるようにロボット制御システムを構成する。また、1つの上記ロボットについてすべての上記外部軸が連結された仮想ロボットを擬制し、かかる仮想ロボットごとに取得した上記ロボットおよび上記外部軸の位置についての取得値それぞれを所定の基準座標系における絶対位置を示す変換値へ変換する変換部を備えるようにロボット制御システムを構成する。
【解決手段】複数のロボットと、かかるロボットが共有する可動軸である少なくとも1つの外部軸とを備えるようにロボット制御システムを構成する。また、1つの上記ロボットについてすべての上記外部軸が連結された仮想ロボットを擬制し、かかる仮想ロボットごとに取得した上記ロボットおよび上記外部軸の位置についての取得値それぞれを所定の基準座標系における絶対位置を示す変換値へ変換する変換部を備えるようにロボット制御システムを構成する。
【発明の詳細な説明】
【技術分野】
【0001】
開示の実施形態は、ロボット制御システムおよびロボット制御方法に関する。
【背景技術】
【0002】
従来、多軸ロボットを制御するロボット制御システムが知られている。かかるロボット制御システムは、たとえば、エンコーダなどの位置検出器を用いて検出した各軸の位置情報に基づき、多軸ロボットが周囲の障害物へ干渉することを防止する干渉防止制御などを行う(たとえば、特許文献1参照)。
【0003】
また、1つの胴部に1対の多軸ロボットを双腕として備える双腕ロボットも知られている。かかる双腕ロボットの場合には、ロボット制御システムは、腕ごとに、すなわち、多軸ロボットごとに個別に、前述の位置検出に基づく干渉防止制御を行う。
【0004】
また、双腕ロボットの胴部が、たとえば、床面などの固定面ではなく、旋回軸や走行軸といった可動する外部軸に固定されている場合には、ロボット制御システムは、かかる外部軸についても個別に取り扱うのが一般的である。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2009−90403号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、従来のロボット制御システムでは、上述のように、多軸ロボットおよび外部軸ごとに個別の干渉防止制御を行うため、システム全体の処理が複雑化しやすいという問題があった。
【0007】
なお、多軸ロボットの動作には、確実性が求められるのが通常である。したがって、かかる確実性を担保するためにも、システム全体へ影響を与える複雑化を回避することが好ましい。
【0008】
また、かかる課題は、双腕ロボットの干渉防止制御だけでなく、相互に連結された複数のロボットの制御全般についても同様に生じる課題である。
【0009】
実施形態の一態様は、上記に鑑みてなされたものであって、相互に連結された複数のロボットを容易かつ確実に制御することができるロボット制御システムおよびロボット制御方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
実施形態の一態様に係るロボット制御システムは、複数のロボットと、前記ロボットが共有する可動軸である少なくとも1つの外部軸と、変換手段とを備える。変換手段は、1つの前記ロボットについてすべての前記外部軸が連結された仮想ロボットを擬制し、前記仮想ロボットごとに取得した前記ロボットおよび前記外部軸の位置についての取得値それぞれを所定の基準座標系における絶対位置を示す変換値へ変換する。
【発明の効果】
【0011】
実施形態の一態様によれば、相互に連結された複数のロボットを容易かつ確実に制御することができる。
【図面の簡単な説明】
【0012】
【図1】図1は、実施形態に係るロボット制御システムの構成例を示す図である。
【図2A】図2Aは、実施形態に係るロボット制御システムにおける各軸の模式図である。
【図2B】図2Bは、実施形態に係るロボット制御システムにおいて擬制される仮想ロボットを示す図である。
【図3】図3は、実施形態に係るロボット制御システムの構成例を示すブロック図である。
【図4A】図4Aは、実施形態に係るロボット制御システムの接続関係を示す図である。
【図4B】図4Bは、実施形態に係るロボット制御システムの接続構成例を示す図である。
【図5】図5は、実施形態に係るロボット制御システムが実行する処理手順を示すフローチャートである。
【図6A】図6Aは、一般的な干渉防止制御手法の概要を示す図である。
【図6B】図6Bは、従来の干渉防止制御手法における各軸の模式図である。
【発明を実施するための形態】
【0013】
以下、添付図面を参照して、本願の開示するロボット制御システムおよびロボット制御方法の実施形態を詳細に説明する。なお、以下に示す実施形態によりこの発明が限定されるものではない。
【0014】
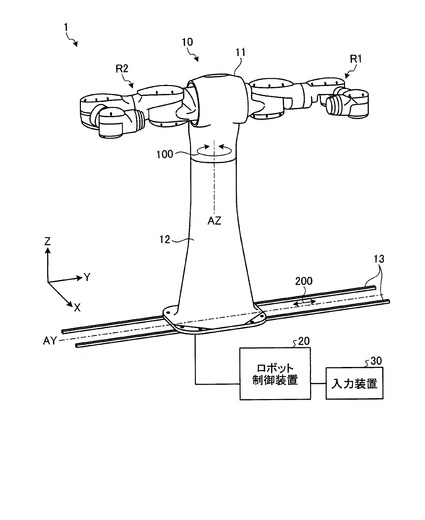
図1は、実施形態に係るロボット制御システム1の構成例を示す図である。なお、説明を分かりやすくするために、図1には、鉛直上向きを正方向とするZ軸を含む3次元の直交座標系を図示している。かかる直交座標系は、以下の説明に用いる他の図面においても示す場合がある。
【0015】
図1に示すように、ロボット制御システム1は、ロボット10と、ロボット制御装置20と、入力装置30とを備える。
【0016】
ロボット10は、ロボットR1と、ロボットR2と、胴部11と、基部12とを備える。ここで、図1に示すように、ロボット10は、ロボットR1およびロボットR2を双腕として備える、いわゆる双腕ロボットである。
【0017】
また、ロボットR1およびロボットR2は、それぞれが多軸ロボット(図1では7軸ロボット)であり、双方の終端可動部にはエンドエフェクタ(図示せず)が設けられる。
【0018】
また、図1に示すように、胴部11は、ロボットR1およびロボットR2をそれぞれ支持する。また、基部12は、胴部11を旋回軸AZまわりに旋回可能に支持する(図中の両矢印100参照)。そして、基部12は、レール部13上に配置される。
【0019】
また、基部12は、図示しない走行機構を備えており、配置されたレール部13上を走行軸AYに沿って走行する(図中の両矢印200参照)。なお、ここで、旋回軸AZおよび走行軸AYは、ロボットR1およびロボットR2が共有する外部軸であるということができる。
【0020】
ロボット制御装置20は、ロボット10の制御全般を行うコントローラである。なお、以下では、ロボット制御装置20が、主に干渉防止制御を行う場合を例に挙げて説明することとする。また、ロボット制御装置20の構成例については、図3を用いて後述する。
【0021】
かかるロボット制御装置20は、たとえば、有線LAN(Local Area Network)や無線LANといった通信ネットワークを介してロボット10へ接続される。
【0022】
入力装置30は、操作者からの操作を受け付ける装置である。なお、入力装置30もまた、有線LANや無線LANといった通信ネットワークを介してロボット制御装置20へ接続される。操作者は、かかる入力装置30を介して、ロボット10へのティーチングや、ロボット10の動作領域の設定などを行う。
【0023】
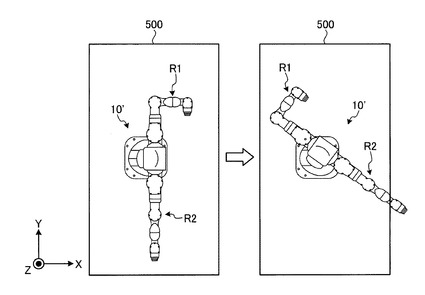
ここで、干渉防止制御手法について、図6Aおよび図6Bを用いて説明しておく。図6Aは、一般的な干渉防止制御手法の概要を示す図であり、図6Bは、従来の干渉防止制御手法における各軸の模式図である。
【0024】
なお、図6Aおよび図6Bに示すロボット10’は、実施形態に係るロボット制御システム1のロボット10と同軸構成であるものとする。
【0025】
また、図6Aには、紙面左側にロボット10’の動作前の様子を、紙面右側にロボット10’の動作後の様子をそれぞれ示しており、動作前においては、ロボット10’は、所定の動作領域500の領域内にあるものとする。
【0026】
図6Aに示すように、一般的な干渉防止制御手法は、ロボット10’へ動作指示を与える場合に、かかる動作指示によってロボットR1またはロボットR2が動作領域500の領域外へ出ることとなるか否かを判定する。
【0027】
ここで、図6Aの紙面右側に示すように、ロボットR1またはロボットR2が動作領域500の領域外へ出ると判定された場合、たとえば、動作領域500の領域内に収めるように、動作指示に対して修正が加えられる。なお、以下では、かかる処理を動作指示の「事前チェック処理」と記載する。
【0028】
また、動作指示のタイムラグや誤差を考慮して、動作後のロボットR1およびロボットR2に対しても動作領域500の領域内にあるか否かの判定が行われる。かかる判定は、ロボットR1およびロボットR2が備えるエンコーダなどの位置検出器による実測値に基づいて行われる。なお、以下では、かかる処理を動作指示の「事後チェック処理」と記載する。
【0029】
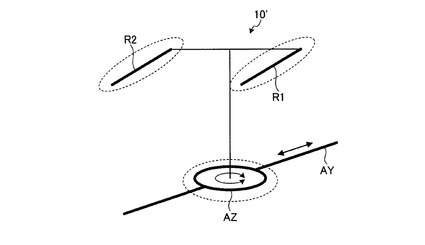
ところで、図6Bに示すように、従来の干渉防止制御手法においては、ロボット10’が備えるロボットR1およびロボットR2の位置を、それぞれ個別の座標系において取得していた。
【0030】
同様に、たとえば、図1に示した旋回軸AZの位置(具体的には、回転角など)についても、個別の座標系において取得していた。
【0031】
なお、図6Bの破線の閉曲線で囲まれた部分は、ロボットR1、ロボットR2および旋回軸AZの位置が、それぞれ個別に取得されることをあらわしている。なお、図示していないが、かかる点は走行軸AYについても同様である。
【0032】
したがって、従来の干渉防止制御手法においては、ロボットR1、ロボットR2および旋回軸AZの相互の位置を把握しづらかった。すなわち、干渉防止制御処理が複雑化しやすいため、たとえば、ロボット10’に対してティーチングを行う操作者に対しても高い熟練度が求められていた。
【0033】
そこで、実施形態に係るロボット制御システム1では、ロボットR1、ロボットR2およびこれらが共有する外部軸の位置を、共通する所定の基準座標系において取得することとした。
【0034】
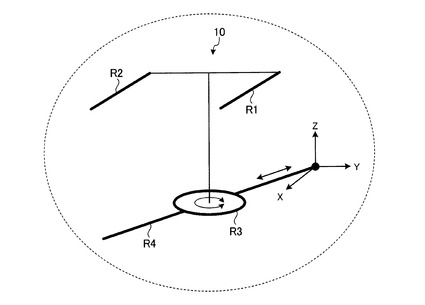
かかる点の詳細について、図2Aおよび図2Bを用いて説明する。図2Aは、実施形態に係るロボット制御システム1における各軸の模式図であり、図2Bは、実施形態に係るロボット制御システム1において擬制される仮想ロボットを示す図である。
【0035】
図2Aに示すように、実施形態に係るロボット制御システム1では、ロボットR1およびロボットR2に加えて、外部軸である旋回軸AZおよび走行軸AY(図1参照)を、それぞれロボットR3およびロボットR4として取り扱うこととした。
【0036】
そして、これらロボットR1〜ロボットR4それぞれの位置を、共通する所定の基準座標系において取得することとした。なお、図2Aの破線の閉曲線で囲まれた部分は、ロボットR1〜ロボットR4それぞれの位置が、たとえば、ロボットR4のベース座標系(図中のXYZ座標参照)を基準座標系として取得されることをあらわしている。
【0037】
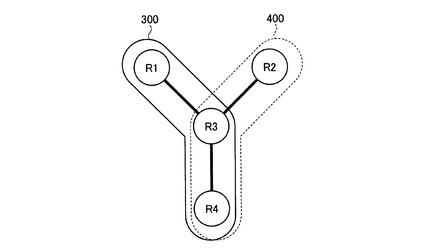
具体的には、実施形態に係るロボット制御システム1では、1つの多軸ロボットについてすべての外部軸が数珠つなぎに連結された仮想ロボットを擬制する。たとえば、図2Bの閉曲線300に囲まれた部分に示すように、ロボットR1については、ロボットR3およびロボットR4が数珠つなぎに連結された仮想ロボットを擬制する。
【0038】
また、図2Bの閉曲線400に囲まれた部分に示すように、ロボットR2についても、ロボットR3およびロボットR4が数珠つなぎに連結された仮想ロボットを擬制する。
【0039】
そして、実施形態に係るロボット制御システム1では、これら仮想ロボットのそれぞれについて、仮想ロボットを構成する各軸(すなわち、各ロボット)の位置を取得する。そして、仮想ロボットごとに取得した位置についての取得値それぞれを所定の基準座標系における絶対位置を示す変換値へ変換する。
【0040】
このとき、所定の基準座標系は、ロボットR1またはロボットR2を始端とする数珠つなぎの終端に位置付けられる外部軸のベース座標系が設定される。すなわち、図2Bに示した例の場合、終端にはロボットR4が位置付けられるので、かかるロボットR4のベース座標系が基準座標系となる。
【0041】
これにより、仮想ロボットを構成する各軸の所定の基準座標系における位置が、少なくとも仮想ロボット単位で共有される。すなわち、ロボットR1およびロボットR2のそれぞれは、ロボットR3およびロボットR4の位置情報を得ることができる。
【0042】
そして、実施形態に係るロボット制御システム1では、最終的にこれら仮想ロボットごとの位置情報を統合し、ロボット10全体の各軸の絶対位置を把握する。すなわち、個別の座標系を制御することによる処理の複雑化を回避することができるので、相互に連結された多軸ロボットである双腕ロボットを容易かつ確実に制御することができる。
【0043】
なお、上述した例では、仮想ロボットの終端に位置付く外部軸のベース座標系を基準座標系とする場合を示したが、基準座標系を、地面または作業床面に設定したワールド座標系につねに固定することとしてもよい。
【0044】
次に、実施形態に係るロボット制御システム1の構成例について、図3を用いてさらに詳細に説明する。図3は、実施形態に係るロボット制御システム1の構成例を示すブロック図である。
【0045】
なお、図3では、ロボット制御システム1の説明にあたり必要な構成要素のみを示しており、一般的な構成要素についての記載を省略している。また、図3に示す構成要素は、あくまで機能などに基づいて抽象化された論理ブロックであって、ロボット制御システム1のハードウェア構成などを限定するものではない。
【0046】
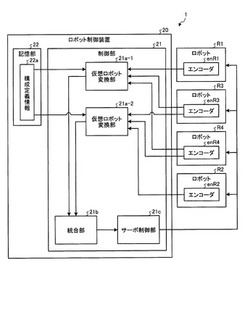
図3に示すように、ロボット制御システム1は、ロボットR1〜ロボットR4と、ロボット制御装置20とを備える。なお、図1に示した入力装置30は、ここでの記載を省略している。
【0047】
また、ロボットR1は、位置検出器であるエンコーダenR1を備える。同様に、ロボットR2はエンコーダenR2を、ロボットR3はエンコーダenR3を、ロボットR4はエンコーダenR4を、それぞれ備える。
【0048】
なお、ロボットR1およびロボットR2は多軸ロボットであるので、実際には、多軸ロボットの各軸に対応したエンコーダを有するが、ここでは所定の代表位置を検出するエンコーダenR1およびエンコーダenR2のみを示している。
【0049】
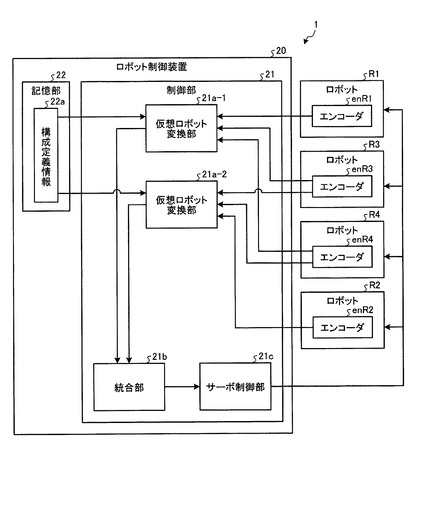
また、ロボット制御装置20は、制御部21と、記憶部22とを備える。また、制御部21は、ロボットR1に対応する仮想ロボット変換部21a−1と、ロボットR2に対応する仮想ロボット変換部21a−2と、統合部21bと、サーボ制御部21cとを備える。また、記憶部22は、構成定義情報22aを記憶する。
【0050】
仮想ロボット変換部21a−1は、ロボットR1について、ロボットR3およびロボットR4が連結された仮想ロボットを擬制し、かかる仮想ロボットの各軸であるロボットR1、ロボットR3およびロボットR4の位置を取得する処理部である。
【0051】
具体的には、仮想ロボット変換部21a−1は、エンコーダenR1の出力値をロボットR1の位置を示す取得値として取得する。また、同様に、エンコーダenR3の出力値をロボットR3の位置を示す取得値として、エンコーダenR4の出力値をロボットR4の位置を示す取得値として、それぞれ取得する。
【0052】
また、仮想ロボット変換部21a−1は、取得した取得値それぞれを所定の基準座標系における絶対位置を示す変換値へ変換する。かかる変換には、いわゆる順キネマティクス演算などを用いることができる。また、変換された変換値は、後述する統合部21bへ出力される。
【0053】
なお、仮想ロボット変換部21a−1は、記憶部22の構成定義情報22aにあらかじめ登録された仮想ロボットの構成に関する定義情報を参照して、所定の基準座標系などを決定する。かかる定義情報には、たとえば、ロボットR1、ロボットR3およびロボットR4のいずれが上位に位置付くかといった接続関係を示す情報などが含まれる。
【0054】
また、仮想ロボット変換部21a−1は、変換した変換値に基づき、上述した動作指示の事後チェック処理をあわせて行う。
【0055】
仮想ロボット変換部21a−2は、ロボットR2について、ロボットR3およびロボットR4が連結された仮想ロボットを擬制し、かかる仮想ロボットの各軸であるロボットR2、ロボットR3およびロボットR4の位置を取得する処理部である。
【0056】
なお、仮想ロボット変換部21a−2の処理は、ロボットR1がロボットR2と置き換わる以外は仮想ロボット変換部21a−1の処理と同様であるので、ここでの記載を省略する。
【0057】
また、図3には、仮想ロボット変換部が、仮想ロボット変換部21a−1および仮想ロボット変換部21a−2の2個である場合を示しているが、擬制する仮想ロボットの個数にあわせて任意の個数とすることができる。
【0058】
統合部21bは、仮想ロボット変換部21a−1および仮想ロボット変換部21a−2から入力された各仮想ロボットの各軸の位置を示す変換値に基づき、ロボット10(図1参照)全体の各軸の位置を所定の基準座標系において統合する処理を行う処理部である。
【0059】
また、統合部21bは、統合したロボット10の各軸の位置に基づき、上述した動作指示の事前チェック処理をあわせて行う。
【0060】
また、統合部21bは、事前チェック処理を介した後、サーボ制御部21cに対して動作指示を出力する。なお、動作指示を監視することで、ロボットR1とロボットR2の干渉をチェックすることも可能である。
【0061】
サーボ制御部21cは、統合部21bから入力された動作指示に基づき、ロボットR1〜ロボットR4がそれぞれ備えるサーボ(図示せず)の制御信号を、各サーボに対して出力する処理を行う処理部である。
【0062】
そして、各サーボは、かかるサーボ制御部21cからの制御信号に基づき、ロボットR1〜ロボットR4をそれぞれ駆動することとなる。
【0063】
記憶部22は、不揮発性メモリやハードディスクドライブといった記憶デバイスで構成され、構成定義情報22aを記憶する。構成定義情報22aについては上述したため、ここでの記載を省略する。
【0064】
次に、実施形態に係るロボット制御システム1の接続構成について、図4Aおよび図4Bを用いて説明する。図4Aは、実施形態に係るロボット制御システム1の接続関係を示す図であり、図4Bは、実施形態に係るロボット制御システム1の接続構成例を示す図である。
【0065】
なお、図4Aおよび図4Bに示す仮想ロボット変換ユニット210a−1は、図3に示した仮想ロボット変換部21a−1に対応する部品である。また、仮想ロボット変換ユニット210a−2は、図3に示した仮想ロボット変換部21a−2に対応する部品である。
【0066】
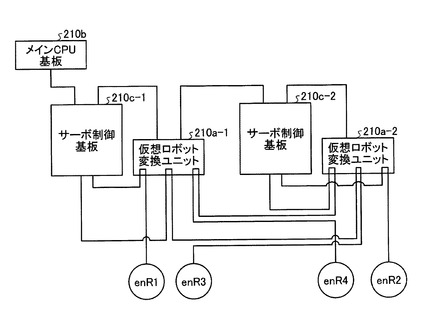
同様に、メインCPU基板210bは、図3に示した統合部21bに対応する部品である。また、同様に、サーボ制御基板210c−1およびサーボ制御基板210c−2は、図3に示したサーボ制御部21cに対応する部品である。
【0067】
ここで、図4Aおよび図4Bに示すサーボ制御基板210c−1は、ロボットR1およびロボットR3の各軸を駆動するものとする。また、サーボ制御基板210c−2は、ロボットR2およびロボットR4の各軸を駆動するものとする。
【0068】
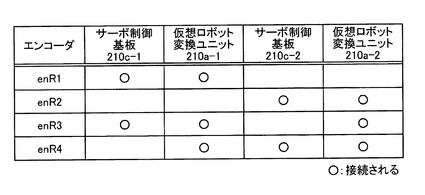
かかる場合、図4Aに示すように、エンコーダenR1は、サーボ制御基板210c−1および仮想ロボット変換ユニット210a−1と接続される(図中の「○」印参照。以下、同様)。また、エンコーダenR2は、サーボ制御基板210c−2および仮想ロボット変換ユニット210a−2と接続される。
【0069】
また、図4Aに示すように、エンコーダenR3は、サーボ制御基板210c−1、仮想ロボット変換ユニット210a−1および仮想ロボット変換ユニット210a−2と接続される。また、エンコーダenR4は、仮想ロボット変換ユニット210a−1、サーボ制御基板210c−2および仮想ロボット変換ユニット210a−2と接続される。
【0070】
すなわち、外部軸であるロボットR3のエンコーダenR3は、仮想ロボット変換ユニット210a−1および仮想ロボット変換ユニット210a−2のいずれにも接続される。これは、同じく外部軸であるロボットR4のエンコーダenR4もまた同様である。
【0071】
言い換えるならば、1つの仮想ロボットを擬制するユニット(ここでは、仮想ロボット変換ユニット210a−1または仮想ロボット変換ユニット210a−2のいずれか)は、外部軸に対応付けられたエンコーダすべてと接続される。
【0072】
かかる図4Aに示した接続関係を前提とした接続構成例を図4Bに示す。図4Bに示すように、たとえば、エンコーダenR1は、仮想ロボット変換ユニット210a−1の入力ポートおよび出力ポートを介して、サーボ制御基板210c−1へ接続される。
【0073】
同様に、エンコーダenR2は、仮想ロボット変換ユニット210a−2の入力ポートおよび出力ポートを介して、サーボ制御基板210c−2へ接続される。
【0074】
また、たとえば、エンコーダenR3は、仮想ロボット変換ユニット210a−2および仮想ロボット変換ユニット210a−1を数珠つなぎに介して、サーボ制御基板210c−1へ接続される。
【0075】
同様に、エンコーダenR4は、仮想ロボット変換ユニット210a−1および仮想ロボット変換ユニット210a−2を数珠つなぎに介して、サーボ制御基板210c−2へ接続される。
【0076】
なお、図4Bに示したのは、接続構成のあくまで一例であり、実際の接続構成を限定するものではない。したがって、ロボット制御システム1を構成する各ユニットの物理的な仕様などに応じて適宜変更可能である。
【0077】
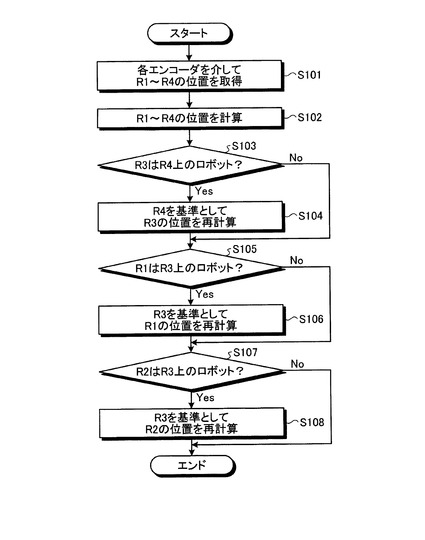
次に、実施形態に係るロボット制御システム1が実行する処理手順について、図5を用いて説明する。図5は、実施形態に係るロボット制御システム1が実行する処理手順を示すフローチャートである。
【0078】
なお、図5には、ロボット制御システム1において実行される位置計算処理の処理手順を示している。かかる位置計算処理は、上述した仮想ロボット変換部21a−1、仮想ロボット変換部21a−2および統合部21bのいずれにおいても実行可能である。
【0079】
図5に示すように、ロボット制御システム1は、各エンコーダenR1〜enR4を介してロボットR1〜ロボットR4の位置を取得する(ステップS101)。
【0080】
そして、ロボット制御システム1は、取得したロボットR1〜ロボットR4の位置についての取得値に基づき、ロボットR1〜ロボットR4の位置を計算する(ステップS102)。なお、ここでの計算は、各エンコーダenR1〜enR4の端的な出力値である取得値を、それぞれ個別の座標系において位置換算するものである。
【0081】
そして、ロボット制御システム1は、ロボットR3がロボットR4の上位へ連結されているか否かを判定する(ステップS103)。ここで、ロボットR3がロボットR4の上位へ連結されていると判定された場合(ステップS103,Yes)、ロボットR4のベース座標系を基準としてロボットR3の位置を再計算する(ステップS104)。
【0082】
また、ステップS103の判定条件を満たさない場合(ステップS103,No)、ステップS105の処理へ制御を移す。
【0083】
つづいて、ロボット制御システム1は、ロボットR1がロボットR3の上位へ連結されているか否かを判定する(ステップS105)。ここで、ロボットR1がロボットR3の上位へ連結されていると判定された場合(ステップS105,Yes)、ロボットR3のベース座標系を基準としてロボットR1の位置を再計算する(ステップS106)。
【0084】
なお、前述のステップS104においてロボットR3の位置が再計算されていたならば、かかるステップS106におけるロボットR1の位置の再計算は、ロボットR4のベース座標系を基準としていることとなる。かかる点は、後述するステップS108についても同様である。
【0085】
また、ステップS105の判定条件を満たさない場合(ステップS105,No)、ステップS107の処理へ制御を移す。
【0086】
つづいて、ロボット制御システム1は、ロボットR2がロボットR3の上位へ連結されているか否かを判定する(ステップS107)。ここで、ロボットR2がロボットR3の上位へ連結されていると判定された場合(ステップS107,Yes)、ロボットR3のベース座標系を基準としてロボットR2の位置を再計算し(ステップS108)、処理を終了する。
【0087】
また、ステップS107の判定条件を満たさない場合(ステップS107,No)、処理を終了する。
【0088】
ところで、これまでは、2つの多軸ロボットを双腕とする双腕ロボットを例に挙げて説明を行ってきたが、ロボットの形態を限定するものではない。たとえば、多軸ロボットが単軸ロボットであってもよいし、3つ以上の腕を有する多腕ロボットであってもよい。
【0089】
すなわち、実施形態に係るロボット制御システムは、外部軸を介して相互に連結された複数のロボットに対して適用することができる。
【0090】
上述してきたように、実施形態に係るロボット制御システムは、複数のロボットと、かかるロボットが共有する可動軸である少なくとも1つの外部軸と、変換部とを備える。そして、変換部は、1つのロボットについてすべての外部軸が連結された仮想ロボットを擬制し、かかる仮想ロボットごとに取得したロボットおよび外部軸の位置についての取得値それぞれを所定の基準座標系における絶対位置を示す変換値へ変換する。
【0091】
したがって、実施形態に係るロボット制御システムによれば、相互に連結された複数のロボットを容易かつ確実に制御することができる。
【0092】
なお、上述した実施形態では、エンコーダを介して取得した取得値に基づいてロボットおよび外部軸の所定の基準座標系における「位置」を求める場合について主に説明したが、かかる「位置」に基づいて示される「姿勢」に応用できることは言うまでもない。なお、かかる「姿勢」は、「向き」と言い換えてもよい。
【0093】
さらなる効果や変形例は、当業者によって容易に導き出すことができる。このため、本発明のより広範な態様は、以上のように表しかつ記述した特定の詳細および代表的な実施形態に限定されるものではない。したがって、添付の特許請求の範囲およびその均等物によって定義される総括的な発明の概念の精神または範囲から逸脱することなく、様々な変更が可能である。
【符号の説明】
【0094】
1 ロボット制御システム
10 ロボット
11 胴部
12 基部
13 レール部
20 ロボット制御装置
21 制御部
21a−1、21a−2 仮想ロボット変換部
21b 統合部
21c サーボ制御部
22 記憶部
22a 構成定義情報
30 入力装置
210a−1、210a−2 仮想ロボット変換ユニット
210b メインCPU基板
210c−1、210c−2 サーボ制御基板
R1、R2、R3、R4 ロボット
enR1、enR2、enR3、enR4 エンコーダ
【技術分野】
【0001】
開示の実施形態は、ロボット制御システムおよびロボット制御方法に関する。
【背景技術】
【0002】
従来、多軸ロボットを制御するロボット制御システムが知られている。かかるロボット制御システムは、たとえば、エンコーダなどの位置検出器を用いて検出した各軸の位置情報に基づき、多軸ロボットが周囲の障害物へ干渉することを防止する干渉防止制御などを行う(たとえば、特許文献1参照)。
【0003】
また、1つの胴部に1対の多軸ロボットを双腕として備える双腕ロボットも知られている。かかる双腕ロボットの場合には、ロボット制御システムは、腕ごとに、すなわち、多軸ロボットごとに個別に、前述の位置検出に基づく干渉防止制御を行う。
【0004】
また、双腕ロボットの胴部が、たとえば、床面などの固定面ではなく、旋回軸や走行軸といった可動する外部軸に固定されている場合には、ロボット制御システムは、かかる外部軸についても個別に取り扱うのが一般的である。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2009−90403号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、従来のロボット制御システムでは、上述のように、多軸ロボットおよび外部軸ごとに個別の干渉防止制御を行うため、システム全体の処理が複雑化しやすいという問題があった。
【0007】
なお、多軸ロボットの動作には、確実性が求められるのが通常である。したがって、かかる確実性を担保するためにも、システム全体へ影響を与える複雑化を回避することが好ましい。
【0008】
また、かかる課題は、双腕ロボットの干渉防止制御だけでなく、相互に連結された複数のロボットの制御全般についても同様に生じる課題である。
【0009】
実施形態の一態様は、上記に鑑みてなされたものであって、相互に連結された複数のロボットを容易かつ確実に制御することができるロボット制御システムおよびロボット制御方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
実施形態の一態様に係るロボット制御システムは、複数のロボットと、前記ロボットが共有する可動軸である少なくとも1つの外部軸と、変換手段とを備える。変換手段は、1つの前記ロボットについてすべての前記外部軸が連結された仮想ロボットを擬制し、前記仮想ロボットごとに取得した前記ロボットおよび前記外部軸の位置についての取得値それぞれを所定の基準座標系における絶対位置を示す変換値へ変換する。
【発明の効果】
【0011】
実施形態の一態様によれば、相互に連結された複数のロボットを容易かつ確実に制御することができる。
【図面の簡単な説明】
【0012】
【図1】図1は、実施形態に係るロボット制御システムの構成例を示す図である。
【図2A】図2Aは、実施形態に係るロボット制御システムにおける各軸の模式図である。
【図2B】図2Bは、実施形態に係るロボット制御システムにおいて擬制される仮想ロボットを示す図である。
【図3】図3は、実施形態に係るロボット制御システムの構成例を示すブロック図である。
【図4A】図4Aは、実施形態に係るロボット制御システムの接続関係を示す図である。
【図4B】図4Bは、実施形態に係るロボット制御システムの接続構成例を示す図である。
【図5】図5は、実施形態に係るロボット制御システムが実行する処理手順を示すフローチャートである。
【図6A】図6Aは、一般的な干渉防止制御手法の概要を示す図である。
【図6B】図6Bは、従来の干渉防止制御手法における各軸の模式図である。
【発明を実施するための形態】
【0013】
以下、添付図面を参照して、本願の開示するロボット制御システムおよびロボット制御方法の実施形態を詳細に説明する。なお、以下に示す実施形態によりこの発明が限定されるものではない。
【0014】
図1は、実施形態に係るロボット制御システム1の構成例を示す図である。なお、説明を分かりやすくするために、図1には、鉛直上向きを正方向とするZ軸を含む3次元の直交座標系を図示している。かかる直交座標系は、以下の説明に用いる他の図面においても示す場合がある。
【0015】
図1に示すように、ロボット制御システム1は、ロボット10と、ロボット制御装置20と、入力装置30とを備える。
【0016】
ロボット10は、ロボットR1と、ロボットR2と、胴部11と、基部12とを備える。ここで、図1に示すように、ロボット10は、ロボットR1およびロボットR2を双腕として備える、いわゆる双腕ロボットである。
【0017】
また、ロボットR1およびロボットR2は、それぞれが多軸ロボット(図1では7軸ロボット)であり、双方の終端可動部にはエンドエフェクタ(図示せず)が設けられる。
【0018】
また、図1に示すように、胴部11は、ロボットR1およびロボットR2をそれぞれ支持する。また、基部12は、胴部11を旋回軸AZまわりに旋回可能に支持する(図中の両矢印100参照)。そして、基部12は、レール部13上に配置される。
【0019】
また、基部12は、図示しない走行機構を備えており、配置されたレール部13上を走行軸AYに沿って走行する(図中の両矢印200参照)。なお、ここで、旋回軸AZおよび走行軸AYは、ロボットR1およびロボットR2が共有する外部軸であるということができる。
【0020】
ロボット制御装置20は、ロボット10の制御全般を行うコントローラである。なお、以下では、ロボット制御装置20が、主に干渉防止制御を行う場合を例に挙げて説明することとする。また、ロボット制御装置20の構成例については、図3を用いて後述する。
【0021】
かかるロボット制御装置20は、たとえば、有線LAN(Local Area Network)や無線LANといった通信ネットワークを介してロボット10へ接続される。
【0022】
入力装置30は、操作者からの操作を受け付ける装置である。なお、入力装置30もまた、有線LANや無線LANといった通信ネットワークを介してロボット制御装置20へ接続される。操作者は、かかる入力装置30を介して、ロボット10へのティーチングや、ロボット10の動作領域の設定などを行う。
【0023】
ここで、干渉防止制御手法について、図6Aおよび図6Bを用いて説明しておく。図6Aは、一般的な干渉防止制御手法の概要を示す図であり、図6Bは、従来の干渉防止制御手法における各軸の模式図である。
【0024】
なお、図6Aおよび図6Bに示すロボット10’は、実施形態に係るロボット制御システム1のロボット10と同軸構成であるものとする。
【0025】
また、図6Aには、紙面左側にロボット10’の動作前の様子を、紙面右側にロボット10’の動作後の様子をそれぞれ示しており、動作前においては、ロボット10’は、所定の動作領域500の領域内にあるものとする。
【0026】
図6Aに示すように、一般的な干渉防止制御手法は、ロボット10’へ動作指示を与える場合に、かかる動作指示によってロボットR1またはロボットR2が動作領域500の領域外へ出ることとなるか否かを判定する。
【0027】
ここで、図6Aの紙面右側に示すように、ロボットR1またはロボットR2が動作領域500の領域外へ出ると判定された場合、たとえば、動作領域500の領域内に収めるように、動作指示に対して修正が加えられる。なお、以下では、かかる処理を動作指示の「事前チェック処理」と記載する。
【0028】
また、動作指示のタイムラグや誤差を考慮して、動作後のロボットR1およびロボットR2に対しても動作領域500の領域内にあるか否かの判定が行われる。かかる判定は、ロボットR1およびロボットR2が備えるエンコーダなどの位置検出器による実測値に基づいて行われる。なお、以下では、かかる処理を動作指示の「事後チェック処理」と記載する。
【0029】
ところで、図6Bに示すように、従来の干渉防止制御手法においては、ロボット10’が備えるロボットR1およびロボットR2の位置を、それぞれ個別の座標系において取得していた。
【0030】
同様に、たとえば、図1に示した旋回軸AZの位置(具体的には、回転角など)についても、個別の座標系において取得していた。
【0031】
なお、図6Bの破線の閉曲線で囲まれた部分は、ロボットR1、ロボットR2および旋回軸AZの位置が、それぞれ個別に取得されることをあらわしている。なお、図示していないが、かかる点は走行軸AYについても同様である。
【0032】
したがって、従来の干渉防止制御手法においては、ロボットR1、ロボットR2および旋回軸AZの相互の位置を把握しづらかった。すなわち、干渉防止制御処理が複雑化しやすいため、たとえば、ロボット10’に対してティーチングを行う操作者に対しても高い熟練度が求められていた。
【0033】
そこで、実施形態に係るロボット制御システム1では、ロボットR1、ロボットR2およびこれらが共有する外部軸の位置を、共通する所定の基準座標系において取得することとした。
【0034】
かかる点の詳細について、図2Aおよび図2Bを用いて説明する。図2Aは、実施形態に係るロボット制御システム1における各軸の模式図であり、図2Bは、実施形態に係るロボット制御システム1において擬制される仮想ロボットを示す図である。
【0035】
図2Aに示すように、実施形態に係るロボット制御システム1では、ロボットR1およびロボットR2に加えて、外部軸である旋回軸AZおよび走行軸AY(図1参照)を、それぞれロボットR3およびロボットR4として取り扱うこととした。
【0036】
そして、これらロボットR1〜ロボットR4それぞれの位置を、共通する所定の基準座標系において取得することとした。なお、図2Aの破線の閉曲線で囲まれた部分は、ロボットR1〜ロボットR4それぞれの位置が、たとえば、ロボットR4のベース座標系(図中のXYZ座標参照)を基準座標系として取得されることをあらわしている。
【0037】
具体的には、実施形態に係るロボット制御システム1では、1つの多軸ロボットについてすべての外部軸が数珠つなぎに連結された仮想ロボットを擬制する。たとえば、図2Bの閉曲線300に囲まれた部分に示すように、ロボットR1については、ロボットR3およびロボットR4が数珠つなぎに連結された仮想ロボットを擬制する。
【0038】
また、図2Bの閉曲線400に囲まれた部分に示すように、ロボットR2についても、ロボットR3およびロボットR4が数珠つなぎに連結された仮想ロボットを擬制する。
【0039】
そして、実施形態に係るロボット制御システム1では、これら仮想ロボットのそれぞれについて、仮想ロボットを構成する各軸(すなわち、各ロボット)の位置を取得する。そして、仮想ロボットごとに取得した位置についての取得値それぞれを所定の基準座標系における絶対位置を示す変換値へ変換する。
【0040】
このとき、所定の基準座標系は、ロボットR1またはロボットR2を始端とする数珠つなぎの終端に位置付けられる外部軸のベース座標系が設定される。すなわち、図2Bに示した例の場合、終端にはロボットR4が位置付けられるので、かかるロボットR4のベース座標系が基準座標系となる。
【0041】
これにより、仮想ロボットを構成する各軸の所定の基準座標系における位置が、少なくとも仮想ロボット単位で共有される。すなわち、ロボットR1およびロボットR2のそれぞれは、ロボットR3およびロボットR4の位置情報を得ることができる。
【0042】
そして、実施形態に係るロボット制御システム1では、最終的にこれら仮想ロボットごとの位置情報を統合し、ロボット10全体の各軸の絶対位置を把握する。すなわち、個別の座標系を制御することによる処理の複雑化を回避することができるので、相互に連結された多軸ロボットである双腕ロボットを容易かつ確実に制御することができる。
【0043】
なお、上述した例では、仮想ロボットの終端に位置付く外部軸のベース座標系を基準座標系とする場合を示したが、基準座標系を、地面または作業床面に設定したワールド座標系につねに固定することとしてもよい。
【0044】
次に、実施形態に係るロボット制御システム1の構成例について、図3を用いてさらに詳細に説明する。図3は、実施形態に係るロボット制御システム1の構成例を示すブロック図である。
【0045】
なお、図3では、ロボット制御システム1の説明にあたり必要な構成要素のみを示しており、一般的な構成要素についての記載を省略している。また、図3に示す構成要素は、あくまで機能などに基づいて抽象化された論理ブロックであって、ロボット制御システム1のハードウェア構成などを限定するものではない。
【0046】
図3に示すように、ロボット制御システム1は、ロボットR1〜ロボットR4と、ロボット制御装置20とを備える。なお、図1に示した入力装置30は、ここでの記載を省略している。
【0047】
また、ロボットR1は、位置検出器であるエンコーダenR1を備える。同様に、ロボットR2はエンコーダenR2を、ロボットR3はエンコーダenR3を、ロボットR4はエンコーダenR4を、それぞれ備える。
【0048】
なお、ロボットR1およびロボットR2は多軸ロボットであるので、実際には、多軸ロボットの各軸に対応したエンコーダを有するが、ここでは所定の代表位置を検出するエンコーダenR1およびエンコーダenR2のみを示している。
【0049】
また、ロボット制御装置20は、制御部21と、記憶部22とを備える。また、制御部21は、ロボットR1に対応する仮想ロボット変換部21a−1と、ロボットR2に対応する仮想ロボット変換部21a−2と、統合部21bと、サーボ制御部21cとを備える。また、記憶部22は、構成定義情報22aを記憶する。
【0050】
仮想ロボット変換部21a−1は、ロボットR1について、ロボットR3およびロボットR4が連結された仮想ロボットを擬制し、かかる仮想ロボットの各軸であるロボットR1、ロボットR3およびロボットR4の位置を取得する処理部である。
【0051】
具体的には、仮想ロボット変換部21a−1は、エンコーダenR1の出力値をロボットR1の位置を示す取得値として取得する。また、同様に、エンコーダenR3の出力値をロボットR3の位置を示す取得値として、エンコーダenR4の出力値をロボットR4の位置を示す取得値として、それぞれ取得する。
【0052】
また、仮想ロボット変換部21a−1は、取得した取得値それぞれを所定の基準座標系における絶対位置を示す変換値へ変換する。かかる変換には、いわゆる順キネマティクス演算などを用いることができる。また、変換された変換値は、後述する統合部21bへ出力される。
【0053】
なお、仮想ロボット変換部21a−1は、記憶部22の構成定義情報22aにあらかじめ登録された仮想ロボットの構成に関する定義情報を参照して、所定の基準座標系などを決定する。かかる定義情報には、たとえば、ロボットR1、ロボットR3およびロボットR4のいずれが上位に位置付くかといった接続関係を示す情報などが含まれる。
【0054】
また、仮想ロボット変換部21a−1は、変換した変換値に基づき、上述した動作指示の事後チェック処理をあわせて行う。
【0055】
仮想ロボット変換部21a−2は、ロボットR2について、ロボットR3およびロボットR4が連結された仮想ロボットを擬制し、かかる仮想ロボットの各軸であるロボットR2、ロボットR3およびロボットR4の位置を取得する処理部である。
【0056】
なお、仮想ロボット変換部21a−2の処理は、ロボットR1がロボットR2と置き換わる以外は仮想ロボット変換部21a−1の処理と同様であるので、ここでの記載を省略する。
【0057】
また、図3には、仮想ロボット変換部が、仮想ロボット変換部21a−1および仮想ロボット変換部21a−2の2個である場合を示しているが、擬制する仮想ロボットの個数にあわせて任意の個数とすることができる。
【0058】
統合部21bは、仮想ロボット変換部21a−1および仮想ロボット変換部21a−2から入力された各仮想ロボットの各軸の位置を示す変換値に基づき、ロボット10(図1参照)全体の各軸の位置を所定の基準座標系において統合する処理を行う処理部である。
【0059】
また、統合部21bは、統合したロボット10の各軸の位置に基づき、上述した動作指示の事前チェック処理をあわせて行う。
【0060】
また、統合部21bは、事前チェック処理を介した後、サーボ制御部21cに対して動作指示を出力する。なお、動作指示を監視することで、ロボットR1とロボットR2の干渉をチェックすることも可能である。
【0061】
サーボ制御部21cは、統合部21bから入力された動作指示に基づき、ロボットR1〜ロボットR4がそれぞれ備えるサーボ(図示せず)の制御信号を、各サーボに対して出力する処理を行う処理部である。
【0062】
そして、各サーボは、かかるサーボ制御部21cからの制御信号に基づき、ロボットR1〜ロボットR4をそれぞれ駆動することとなる。
【0063】
記憶部22は、不揮発性メモリやハードディスクドライブといった記憶デバイスで構成され、構成定義情報22aを記憶する。構成定義情報22aについては上述したため、ここでの記載を省略する。
【0064】
次に、実施形態に係るロボット制御システム1の接続構成について、図4Aおよび図4Bを用いて説明する。図4Aは、実施形態に係るロボット制御システム1の接続関係を示す図であり、図4Bは、実施形態に係るロボット制御システム1の接続構成例を示す図である。
【0065】
なお、図4Aおよび図4Bに示す仮想ロボット変換ユニット210a−1は、図3に示した仮想ロボット変換部21a−1に対応する部品である。また、仮想ロボット変換ユニット210a−2は、図3に示した仮想ロボット変換部21a−2に対応する部品である。
【0066】
同様に、メインCPU基板210bは、図3に示した統合部21bに対応する部品である。また、同様に、サーボ制御基板210c−1およびサーボ制御基板210c−2は、図3に示したサーボ制御部21cに対応する部品である。
【0067】
ここで、図4Aおよび図4Bに示すサーボ制御基板210c−1は、ロボットR1およびロボットR3の各軸を駆動するものとする。また、サーボ制御基板210c−2は、ロボットR2およびロボットR4の各軸を駆動するものとする。
【0068】
かかる場合、図4Aに示すように、エンコーダenR1は、サーボ制御基板210c−1および仮想ロボット変換ユニット210a−1と接続される(図中の「○」印参照。以下、同様)。また、エンコーダenR2は、サーボ制御基板210c−2および仮想ロボット変換ユニット210a−2と接続される。
【0069】
また、図4Aに示すように、エンコーダenR3は、サーボ制御基板210c−1、仮想ロボット変換ユニット210a−1および仮想ロボット変換ユニット210a−2と接続される。また、エンコーダenR4は、仮想ロボット変換ユニット210a−1、サーボ制御基板210c−2および仮想ロボット変換ユニット210a−2と接続される。
【0070】
すなわち、外部軸であるロボットR3のエンコーダenR3は、仮想ロボット変換ユニット210a−1および仮想ロボット変換ユニット210a−2のいずれにも接続される。これは、同じく外部軸であるロボットR4のエンコーダenR4もまた同様である。
【0071】
言い換えるならば、1つの仮想ロボットを擬制するユニット(ここでは、仮想ロボット変換ユニット210a−1または仮想ロボット変換ユニット210a−2のいずれか)は、外部軸に対応付けられたエンコーダすべてと接続される。
【0072】
かかる図4Aに示した接続関係を前提とした接続構成例を図4Bに示す。図4Bに示すように、たとえば、エンコーダenR1は、仮想ロボット変換ユニット210a−1の入力ポートおよび出力ポートを介して、サーボ制御基板210c−1へ接続される。
【0073】
同様に、エンコーダenR2は、仮想ロボット変換ユニット210a−2の入力ポートおよび出力ポートを介して、サーボ制御基板210c−2へ接続される。
【0074】
また、たとえば、エンコーダenR3は、仮想ロボット変換ユニット210a−2および仮想ロボット変換ユニット210a−1を数珠つなぎに介して、サーボ制御基板210c−1へ接続される。
【0075】
同様に、エンコーダenR4は、仮想ロボット変換ユニット210a−1および仮想ロボット変換ユニット210a−2を数珠つなぎに介して、サーボ制御基板210c−2へ接続される。
【0076】
なお、図4Bに示したのは、接続構成のあくまで一例であり、実際の接続構成を限定するものではない。したがって、ロボット制御システム1を構成する各ユニットの物理的な仕様などに応じて適宜変更可能である。
【0077】
次に、実施形態に係るロボット制御システム1が実行する処理手順について、図5を用いて説明する。図5は、実施形態に係るロボット制御システム1が実行する処理手順を示すフローチャートである。
【0078】
なお、図5には、ロボット制御システム1において実行される位置計算処理の処理手順を示している。かかる位置計算処理は、上述した仮想ロボット変換部21a−1、仮想ロボット変換部21a−2および統合部21bのいずれにおいても実行可能である。
【0079】
図5に示すように、ロボット制御システム1は、各エンコーダenR1〜enR4を介してロボットR1〜ロボットR4の位置を取得する(ステップS101)。
【0080】
そして、ロボット制御システム1は、取得したロボットR1〜ロボットR4の位置についての取得値に基づき、ロボットR1〜ロボットR4の位置を計算する(ステップS102)。なお、ここでの計算は、各エンコーダenR1〜enR4の端的な出力値である取得値を、それぞれ個別の座標系において位置換算するものである。
【0081】
そして、ロボット制御システム1は、ロボットR3がロボットR4の上位へ連結されているか否かを判定する(ステップS103)。ここで、ロボットR3がロボットR4の上位へ連結されていると判定された場合(ステップS103,Yes)、ロボットR4のベース座標系を基準としてロボットR3の位置を再計算する(ステップS104)。
【0082】
また、ステップS103の判定条件を満たさない場合(ステップS103,No)、ステップS105の処理へ制御を移す。
【0083】
つづいて、ロボット制御システム1は、ロボットR1がロボットR3の上位へ連結されているか否かを判定する(ステップS105)。ここで、ロボットR1がロボットR3の上位へ連結されていると判定された場合(ステップS105,Yes)、ロボットR3のベース座標系を基準としてロボットR1の位置を再計算する(ステップS106)。
【0084】
なお、前述のステップS104においてロボットR3の位置が再計算されていたならば、かかるステップS106におけるロボットR1の位置の再計算は、ロボットR4のベース座標系を基準としていることとなる。かかる点は、後述するステップS108についても同様である。
【0085】
また、ステップS105の判定条件を満たさない場合(ステップS105,No)、ステップS107の処理へ制御を移す。
【0086】
つづいて、ロボット制御システム1は、ロボットR2がロボットR3の上位へ連結されているか否かを判定する(ステップS107)。ここで、ロボットR2がロボットR3の上位へ連結されていると判定された場合(ステップS107,Yes)、ロボットR3のベース座標系を基準としてロボットR2の位置を再計算し(ステップS108)、処理を終了する。
【0087】
また、ステップS107の判定条件を満たさない場合(ステップS107,No)、処理を終了する。
【0088】
ところで、これまでは、2つの多軸ロボットを双腕とする双腕ロボットを例に挙げて説明を行ってきたが、ロボットの形態を限定するものではない。たとえば、多軸ロボットが単軸ロボットであってもよいし、3つ以上の腕を有する多腕ロボットであってもよい。
【0089】
すなわち、実施形態に係るロボット制御システムは、外部軸を介して相互に連結された複数のロボットに対して適用することができる。
【0090】
上述してきたように、実施形態に係るロボット制御システムは、複数のロボットと、かかるロボットが共有する可動軸である少なくとも1つの外部軸と、変換部とを備える。そして、変換部は、1つのロボットについてすべての外部軸が連結された仮想ロボットを擬制し、かかる仮想ロボットごとに取得したロボットおよび外部軸の位置についての取得値それぞれを所定の基準座標系における絶対位置を示す変換値へ変換する。
【0091】
したがって、実施形態に係るロボット制御システムによれば、相互に連結された複数のロボットを容易かつ確実に制御することができる。
【0092】
なお、上述した実施形態では、エンコーダを介して取得した取得値に基づいてロボットおよび外部軸の所定の基準座標系における「位置」を求める場合について主に説明したが、かかる「位置」に基づいて示される「姿勢」に応用できることは言うまでもない。なお、かかる「姿勢」は、「向き」と言い換えてもよい。
【0093】
さらなる効果や変形例は、当業者によって容易に導き出すことができる。このため、本発明のより広範な態様は、以上のように表しかつ記述した特定の詳細および代表的な実施形態に限定されるものではない。したがって、添付の特許請求の範囲およびその均等物によって定義される総括的な発明の概念の精神または範囲から逸脱することなく、様々な変更が可能である。
【符号の説明】
【0094】
1 ロボット制御システム
10 ロボット
11 胴部
12 基部
13 レール部
20 ロボット制御装置
21 制御部
21a−1、21a−2 仮想ロボット変換部
21b 統合部
21c サーボ制御部
22 記憶部
22a 構成定義情報
30 入力装置
210a−1、210a−2 仮想ロボット変換ユニット
210b メインCPU基板
210c−1、210c−2 サーボ制御基板
R1、R2、R3、R4 ロボット
enR1、enR2、enR3、enR4 エンコーダ
【特許請求の範囲】
【請求項1】
複数のロボットと、
前記ロボットが共有する可動軸である少なくとも1つの外部軸と、
1つの前記ロボットについてすべての前記外部軸が連結された仮想ロボットを擬制し、前記仮想ロボットごとに取得した前記ロボットおよび前記外部軸の位置についての取得値それぞれを所定の基準座標系における絶対位置を示す変換値へ変換する変換部と
を備えることを特徴とするロボット制御システム。
【請求項2】
前記変換部は、
前記変換値に基づき、前記ロボットおよび前記外部軸が所定の動作領域内にあるか否かを判定することを特徴とする請求項1に記載のロボット制御システム。
【請求項3】
前記外部軸および前記ロボットの各軸にそれぞれ対応付けて設けられ、前記外部軸および前記ロボットの各軸それぞれの位置を検出する位置検出器
をさらに備え、
1つの前記変換部は、
前記外部軸に対応付けられた前記位置検出器すべてと接続されることを特徴とする請求項1に記載のロボット制御システム。
【請求項4】
前記変換部は、
前記仮想ロボットについて、前記ロボットを始端とする数珠つなぎに前記外部軸を連結したものとして擬制し、前記数珠つなぎの終端に位置する前記外部軸をベースとした場合のベース座標系を前記基準座標系とすることを特徴とする請求項1に記載のロボット制御システム。
【請求項5】
ロボットと前記ロボットへ連結された可動軸である外部軸すべてとを含む仮想ロボットを擬制し、前記仮想ロボットごとに取得した前記ロボットおよび前記外部軸の位置についての取得値それぞれを所定の基準座標系における絶対位置を示す変換値へ変換する変換工程
を含むことを特徴とするロボット制御方法。
【請求項1】
複数のロボットと、
前記ロボットが共有する可動軸である少なくとも1つの外部軸と、
1つの前記ロボットについてすべての前記外部軸が連結された仮想ロボットを擬制し、前記仮想ロボットごとに取得した前記ロボットおよび前記外部軸の位置についての取得値それぞれを所定の基準座標系における絶対位置を示す変換値へ変換する変換部と
を備えることを特徴とするロボット制御システム。
【請求項2】
前記変換部は、
前記変換値に基づき、前記ロボットおよび前記外部軸が所定の動作領域内にあるか否かを判定することを特徴とする請求項1に記載のロボット制御システム。
【請求項3】
前記外部軸および前記ロボットの各軸にそれぞれ対応付けて設けられ、前記外部軸および前記ロボットの各軸それぞれの位置を検出する位置検出器
をさらに備え、
1つの前記変換部は、
前記外部軸に対応付けられた前記位置検出器すべてと接続されることを特徴とする請求項1に記載のロボット制御システム。
【請求項4】
前記変換部は、
前記仮想ロボットについて、前記ロボットを始端とする数珠つなぎに前記外部軸を連結したものとして擬制し、前記数珠つなぎの終端に位置する前記外部軸をベースとした場合のベース座標系を前記基準座標系とすることを特徴とする請求項1に記載のロボット制御システム。
【請求項5】
ロボットと前記ロボットへ連結された可動軸である外部軸すべてとを含む仮想ロボットを擬制し、前記仮想ロボットごとに取得した前記ロボットおよび前記外部軸の位置についての取得値それぞれを所定の基準座標系における絶対位置を示す変換値へ変換する変換工程
を含むことを特徴とするロボット制御方法。
【図1】


【図2A】
【図2B】
【図3】
【図4A】
【図4B】
【図5】
【図6A】
【図6B】
【図2A】
【図2B】
【図3】
【図4A】
【図4B】
【図5】
【図6A】
【図6B】
【公開番号】特開2013−39635(P2013−39635A)
【公開日】平成25年2月28日(2013.2.28)
【国際特許分類】
【出願番号】特願2011−177897(P2011−177897)
【出願日】平成23年8月16日(2011.8.16)
【出願人】(000006622)株式会社安川電機 (2,482)
【Fターム(参考)】
【公開日】平成25年2月28日(2013.2.28)
【国際特許分類】
【出願日】平成23年8月16日(2011.8.16)
【出願人】(000006622)株式会社安川電機 (2,482)
【Fターム(参考)】
[ Back to top ]