
ロボット制御装置
【課題】各部材の設置の自由度を向上させることができるロボット制御装置を提供することにある。
【解決手段】筐体2内の略上下中央に平板状の隔壁60を設けた。その隔壁60によって形成される下側収容空間S1にモータドライバ40を設けるとともに、上側収容空間S2に第1スイッチング電源ボード70及び第2スイッチング電源ボード72を設けた。また、筐体2のベース部3の内側面にCPUボードを設けて、そのCPUボードの上面と、左側板4及び右側板5の前面4a,5aよりも突出して形成したベース部3の突出部3bの上面とに駆動制御ボード20を設けた。
【解決手段】筐体2内の略上下中央に平板状の隔壁60を設けた。その隔壁60によって形成される下側収容空間S1にモータドライバ40を設けるとともに、上側収容空間S2に第1スイッチング電源ボード70及び第2スイッチング電源ボード72を設けた。また、筐体2のベース部3の内側面にCPUボードを設けて、そのCPUボードの上面と、左側板4及び右側板5の前面4a,5aよりも突出して形成したベース部3の突出部3bの上面とに駆動制御ボード20を設けた。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ロボット制御装置に関する。
【背景技術】
【0002】
従来より、産業用ロボットは、ロボットに搭載されたモータに電力を供給するための電力用ケーブルや動作制御に必要な情報を伝送する信号用ケーブル等の接続ケーブルを介してロボット制御装置と電気的に接続されている。そして、これらの接続ケーブルを介して、ロボット制御装置が動作指令を産業用ロボットに与えることにより、産業用ロボットに任意の動作を行わせている(特許文献1参照)。
【特許文献1】特開平11−188686号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところで、特許文献1に記載のロボット制御装置では、筐体の大きさが決まると、自ずと筐体に内蔵されて産業用ロボットに搭載されるモータを駆動するためのモータドライバ等の各部材を設置することができる設置スペースも決まってしまう。そのため、各部材の設置の自由度が制限されてしまっていた。
【0004】
本発明は、前述した上記問題点を解消するためになされたものであって、その目的は、各部材の設置の自由度を向上させることができるロボット制御装置を提供することにある。
【課題を解決するための手段】
【0005】
本発明のロボット制御装置は、産業用ロボットと接続ケーブルを介して電気的に接続されて、同産業用ロボットの動作を制御するロボット制御装置において、筐体に隔壁を形成して複数の収容空間を形成し、その複数の収容空間に、発熱源となる回路素子を実装した複数のボードを区分けして配置するとともに、それぞれ前記ボードを配置した収容空間毎に放熱機構を配置した。
【0006】
本発明のロボット制御装置によれば、筐体に形成した隔壁によって複数の収容空間が形成されるため、設置スペースを増大させることができる。従って、各部材の設置の自由度を向上させることができる。また、複数の収容空間に発熱源である複数のボードを区分けして配置し、さらにその収容空間に放熱機構を設けた。そのため、発熱源を分散することができ、さらに放熱機構によってその発熱源を効率良く放熱させることができるため、筐体内の温度上昇を好適に抑制することができる。
【0007】
このロボット制御装置において、前記ボードを配置した収容空間毎に、冷却ファンをさらに設けるようにしてもよい。
このロボット制御装置によれば、冷却ファンによって、ボードを配置した収容空間を冷却することができるため、筐体内の温度上昇をより好適に抑制することができる。
【0008】
このロボット制御装置において、前記複数の収容空間の内、1つの収容空間に前記産業用ロボットに搭載されるアクチュエータを駆動させるアクチュエータ駆動ボードを集中配置し、少なくとも同収容空間に冷却ファンを設けるようにしてもよい。
【0009】
このロボット制御装置によれば、発熱量の最も多いアクチュエータ駆動ボードを1つの収容空間に集中配置し、その収容空間に冷却ファンを設けた。そのため、その冷却ファン
によってアクチュエータ駆動ボードを冷却することができる。従って、アクチュエータ駆動ボードを配置した収容空間に冷却ファンを設けることによって、発熱量の最も多い発熱源を冷却することができるため、筐体内の温度上昇を好適に抑制することができる。
【0010】
このロボット制御装置において、前記冷却ファンは、全ての前記アクチュエータ駆動ボードの一側面に対して対向且つ平行になるように配設してもよい。
このロボット制御装置によれば、アクチュエータ駆動ボードを冷却ファンの放熱方向に沿って配設することができるため、アクチュエータ駆動ボードをより効率的に冷却することができる。
【0011】
このロボット制御装置において、前記産業用ロボットのアクチュエータを駆動させるアクチュエータ駆動ボードを制御する駆動制御ボードを前記筐体から突出させて、その突出面に前記筐体の一側面を載置し、前記突出面に前記接続ケーブルを接続してもよい。
【0012】
このロボット制御装置によれば、駆動制御ボードの突出面に接続ケーブルを接続するようにしたため、駆動制御ボードに直接接続ケーブルを接続することができる。従って、接続ケーブルを筐体内で引き回す必要がないため、筐体内の構造を単純化することができる。
【発明を実施するための最良の形態】
【0013】
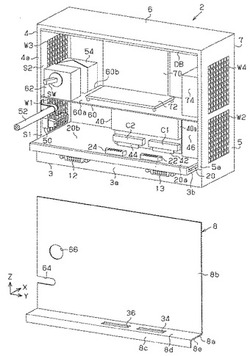
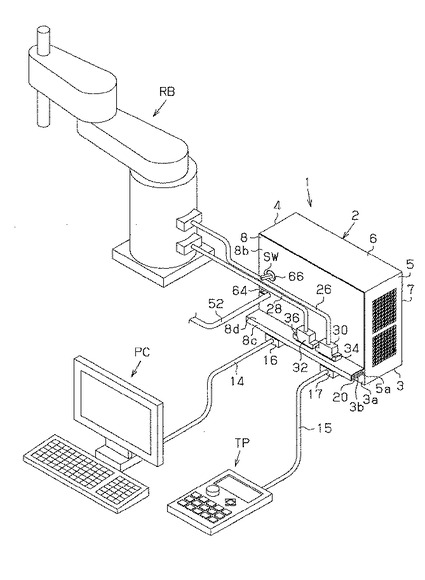
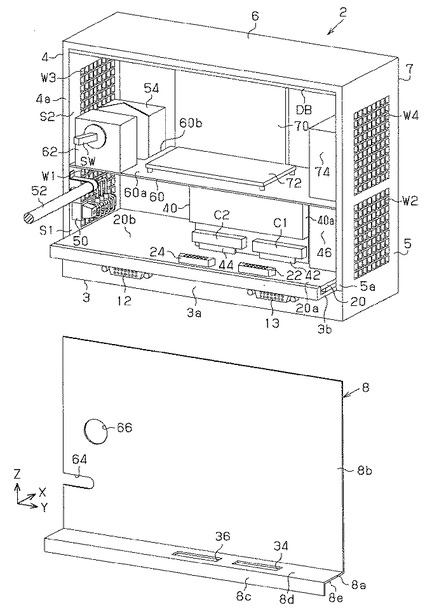
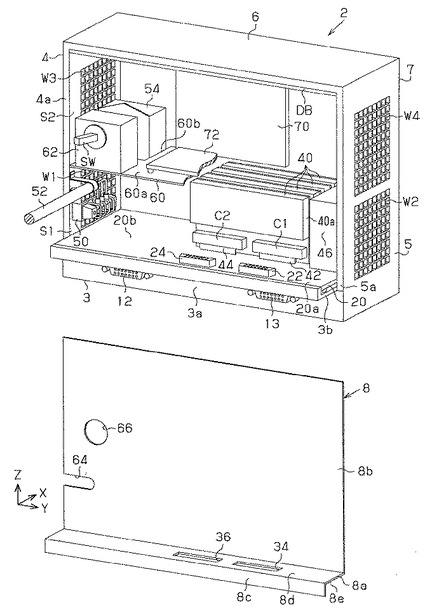
以下、本発明を具体化した一実施形態を図1〜図3に従って説明する。図1は、ロボットRBとロボットコントローラ1との配線を説明するための斜視図、図2及び図3は、ロボットコントローラ1の筐体2の内部構造を説明するための分解斜視図である。なお、図2及び図3では、ボード等に実装されるコンデンサ等の回路素子の図示を省略している。
【0014】
図1において、ロボットRBは、4軸制御の水平多関節型の産業用ロボットであって、ロボットコントローラ1によって駆動制御されている。ロボットコントローラ1の筐体2は、前面取付面3aを有するベース部3と、左右両側板4,5と、ベース部3と相対向する天板6と、背板7と、背板7と相対向する前面板8とによって、略直方体状の箱体が形成されている。
【0015】
図2に示すように、ベース部3の前面取付面3aには、ベース側インターフェースコネクタ12,13が取着されるとともに、そのベース側インターフェースコネクタ12,13は、ベース部3の内側面に設けられたCPUボード(図示しない)に電気的に接続されている。ベース側インターフェースコネクタ12,13は、その長手方向が水平になるように取着されるとともに、図1に示すように、先端がパーソナルコンピュータPC及びティーチングペンダントTPに接続された接続ケーブル14,15の基端のケーブル側インターフェースコネクタ16,17とそれぞれ電気的に接続される。そして、ベース側インターフェースコネクタ12,13には、パーソナルコンピュータPC及びティーチングペンダントTPからロボットRBの情報や教示データ等のロボットRBを駆動させるための駆動情報信号が入力されるようになっている。そして、ベース側インターフェースコネクタ12,13は、パーソナルコンピュータPC及びティーチングペンダントTPから入力された駆動情報信号をCPUボードに出力するようになっている。
【0016】
また、図2に示すように、ベース部3の上側に形成された突出部3bは、先端がクランク状に折り曲げ形成されるとともに、その突出部3bの上面には、駆動制御ボード20が載置されている。また、駆動制御ボード20は、さらに前記CPUボードの上面に載置されるとともに、CPUボードと駆動制御ボード20とは、CPUボードと駆動制御ボード20とに設けられた図示しないコネクタによって電気的に接続されている。なお、CPUボードは、パーソナルコンピュータPC及びティーチングペンダントTPから入力された
駆動情報信号に基づいて位置指令信号を生成して、その位置指令信号を駆動制御ボード20に出力するようになっている。
【0017】
筐体2の左側板4及び右側板5の前面4a,5aから突出した駆動制御ボード20の突出面としての突出部上面20aの右寄りには、ボード側電力用コネクタ22が取着されている。また、駆動制御ボード20の突出部上面20aであって、ボード側電力用コネクタ22の左側には、ボード側信号用コネクタ24が取着されている。ボード側電力用コネクタ22及びボード側信号用コネクタ24は、その長手方向が突出部上面20aの長手方向に沿って取着されている。ボード側電力用コネクタ22及びボード側信号用コネクタ24は、図1に示すように、先端が前記ロボットRBに接続された電力用接続ケーブル26及び信号用接続ケーブル28の基端のケーブル側電力用コネクタ30及びケーブル側信号用コネクタ32とそれぞれ電気的に接続される。
【0018】
詳しくは、図2に示すように、前面板8には、下側をクランク状に折り曲げ形成した段差部8aと、段差部8aを挟んだ上下の面8b,8cとが形成されている。段差部8aの上面8dには、ボード側電力用コネクタ22が貫通する貫通穴34と、ボード側信号用コネクタ24が貫通する貫通穴36とが形成されている。段差部8aの下面8eを駆動制御ボード20の突出部上面20aに載置して前面板8によって筐体2を閉塞すると、ボード側電力用コネクタ22及びボード側信号用コネクタ24が貫通穴34,36をそれぞれ貫通して外部に露出する。このように外部に露出されたボード側電力用コネクタ22及びボード側信号用コネクタ24に、ケーブル側電力用コネクタ30及びケーブル側信号用コネクタ32がそれぞれ電気的に接続される。この時、ケーブル側電力用コネクタ30及びケーブル側信号用コネクタ32は、その接続部と相対向する向きに向けて、ボード側電力用コネクタ22及びボード側信号用コネクタ24とそれぞれ接続する。
【0019】
これによって、駆動制御ボード20の突出部上面20aに設けたボード側電力用コネクタ22に対して電力用接続ケーブル26がケーブル側電力用コネクタ30を介して接続されるため、電力用接続ケーブル26は、前面板8の面8bに沿って平行に配設されることになる。また、駆動制御ボード20の突出部上面20aに設けたボード側信号用コネクタ24に対して信号用接続ケーブル28がケーブル側信号用コネクタ32を介して接続されるため、信号用接続ケーブル28は、前面板8の面8bに沿って平行に配設されることになる。従って、ケーブル径が太く曲げにくい電力用接続ケーブル26及び信号用接続ケーブル28(ケーブル側電力用コネクタ30及びケーブル側信号用コネクタ32)が筐体2から大きく張り出すのを好適に抑制することができる。また、駆動制御ボード20にボード側電力用コネクタ22及びボード側信号用コネクタ24を直接接続したため、通常、ボード側電力用コネクタ22及びボード側信号用コネクタ24の基端から筐体2内に延びる内部配線を省略することができる。そのため、筐体2内の構造を単純にすることができる。なお、前面板8が筐体2の前面に配設されると、前面板8の面8cは、駆動制御ボード20を覆うように配設されるようになっている。
【0020】
図3に示すように、駆動制御ボード20の上面20bには、ロボットRBの各モータを駆動するための各種回路素子を実装したアクチュエータ駆動ボードとしてのモータドライバ40がモータ毎に設けられている。詳しくは、駆動制御ボード20の上面20bであって、ボード側電力用コネクタ22よりもX矢印方向側には、電力用コネクタ42がX方向に所定の間隔を置いて4つ取着されている。また、その電力用コネクタ42の左隣には、信号用コネクタ44が電力用コネクタ42と同様に、X方向に所定の間隔を置いて4つ取着されている。そして、その電力用コネクタ42及び信号用コネクタ44に、モータドライバ40のコネクタ部C1,C2がそれぞれ電気的に接続される。これによって、駆動制御ボード20とモータドライバ40とが電気的に接続され、駆動制御ボード20によってモータドライバ40が制御されるようになっている。
【0021】
そのモータドライバ40の右方であって、筐体2の右側板5の内側面には、冷却ファン46が設けられている。また、左右両側板4,5であって、その冷却ファン46と対向する位置には、放熱機構を構成する通気口W1,W2がそれぞれ形成されている。そして、冷却ファン46を駆動させることにより、外気が通気口W2から筐体2内に取り込まれ、モータドライバ40及び駆動制御ボード20に実装された各回路素子にて熱せられた筐体2内の空気が通気口W1から筐体2外に放出される。なお、4つのモータドライバ40は、その一側面としての右側面40aが冷却ファン46に対して対向するように、且つ平行になるように配設されている。これによって、冷却ファン46による冷却風を全てのモータドライバ40に効率的に当てることができる。
【0022】
また、筐体2内の左側下側に配置されるように、電源入力端子50が前面板8の裏面の左側下側部に取着される。電源入力端子50には、電源ケーブル52の基端が電気的に接続されて、電源ケーブル52の先端に電気的に接続される外部電源(図示しない)から交流電源が給電されるようになっている。電源入力端子50から延設される内部入力配線(図示しない)は、電源入力端子50よりもX矢印方向側の左側板4の内側面に設けられたノイズフィルタ54に電気的に接続される。ノイズフィルタ54は、筐体2内に設けられた平板状の隔壁60の上面60aの左寄りに設けられたサーキットプロテクタ62と電気的に接続されている。図2に示すように、隔壁60は、筐体2の略上下中央に形成されて、筐体2内を2つの収容空間(隔壁60よりも下側に形成された下側収容空間S1及び隔壁60よりも上側に形成された上側収容空間S2)に分割して2段構造にしている。また、隔壁60の左側には、ノイズフィルタ54と接触しないように切り欠き60bが形成されている。なお、電源ケーブル52と、サーキットプロテクタ62に形成された電源スイッチSWとは、筐体2が前面板8によって閉塞されると、前面板8に形成された貫通溝64及び貫通穴66にそれぞれ貫通するようになっている。
【0023】
天板6の内側面には、主電源ボードDBが取着されている。主電源ボードDBは、サーキットプロテクタ62と図示しない接続ケーブルによって電気的に接続されている。これによって、電源ケーブル52を介して外部電源から給電された交流電源が、主電源ボードDBに給電されるようになっている。主電源ボードDBは、前記CPUボードや駆動制御ボード20に交流電源を分配するようになっている。
【0024】
筐体2の背板7の内側面であって、隔壁60の上面60aには、第1スイッチング電源ボード70が取着されている。第1スイッチング電源ボード70は、上端部が図示しない接続ケーブルによって主電源ボードDBと電気的に接続されるとともに、下端部が図示しない接続ケーブルによって駆動制御ボード20と電気的に接続されている。そして、第1スイッチング電源ボード70は、主電源ボードDBから供給される交流電源から直流電源を生成して、その直流電源を駆動制御ボード20に供給するようになっている。
【0025】
隔壁60の上面60aであって、第1スイッチング電源ボード70の前側には、第2スイッチング電源ボード72が取着されている。第2スイッチング電源ボード72は、主電源ボードDBとCPUボードと図示しない接続ケーブルによって電気的に接続されている。そして、第2スイッチング電源ボード72は、主電源ボードDBから供給される交流電源から直流電源を生成して、その直流電源をCPUボードに供給するようになっている。
【0026】
筐体2の左右両側板4,5であって、前記通気口W1,W2の上側には、通気口W3,W4がそれぞれ形成されている。また、隔壁60の上面60aであって右側板5の内側面には、冷却ファン74が配設されている。そして、冷却ファン74を駆動させることにより、外気が通気口W4から筐体2内に取り込まれ、各ボード70,72に実装された各回路素子にて熱せられた筐体2内の上側収容空間S2の空気が通気口W3から筐体2外に放
出される。
【0027】
このように、筐体2内に隔壁60を設けることによって、筐体2内に設けられる各部材の設置スペースを増大させることができる。また、発熱源(モータドライバ40及び各スイッチング電源ボード70,72等)を下側収容空間S1及び上側収容空間S2にそれぞれ分けて配置することができるため、効率的に冷却ファン46,74による冷却風を各回路素子等に当てることができる。従って、筐体2内を効率的に冷却することができる。
【0028】
次に、上記のように構成したロボットコントローラ1の作用について説明する。
筐体2の略上下中央に隔壁60を設ける。これによって、隔壁60の上面60aや下面にも各部材を設けることができるようになるため、各部材の設置スペースを増大させることができ、各部材の設置の自由度を向上させることができる。また、下側収容空間S1にCPUボードと、そのCPUボードの上面に駆動制御ボード20とを設ける。また、CPUボードと駆動制御ボード20とをコネクタ(図示しない)によって直接接続する。そして、駆動制御ボード20の上面に設けた電力用コネクタ42及び信号用コネクタ44に、モータドライバ40のコネクタ部C1,C2を電気的に接続して、下側収容空間S1にモータドライバ40を集中配置する。これによって、モータドライバ40の右側に設けた冷却ファン46による冷却風を効率的にモータドライバ40に当てることができるため、筐体2内を効率的に冷却することができる。
【0029】
また、駆動制御ボード20を、筐体2の左右両側板4,5の前面4a,5aよりも突出させて形成する。そして、その駆動制御ボード20の突出部上面20aにボード側電力用コネクタ22及びボード側信号用コネクタ24を設けて、そのコネクタ22,24に接続ケーブル26,28の基端のケーブル側電力用コネクタ30及びケーブル側信号用コネクタ32を電気的に接続する。これによって、接続ケーブル26,28が、前面板8の面8bに沿って平行に配設されるため、ケーブル径が太く曲げにくい接続ケーブル26,28(ケーブル側電力用コネクタ30及びケーブル側信号用コネクタ32)が筐体2から大きく張り出すのを好適に抑制することができる。また、駆動制御ボード20にボード側電力用コネクタ22及びボード側信号用コネクタ24を直接接続したため、通常、ボード側電力用コネクタ22及びボード側信号用コネクタ24の基端から筐体2内に延びる内部配線を省略することができる。そのため、筐体2内の構造を単純にすることができる。
【0030】
一方、上側収容空間S2に、第1及び第2スイッチング電源ボード70,72を設ける。また、隔壁60の上面60aであって右側板5の内側面に、冷却ファン74を設ける。これによって、冷却ファン74による冷却風を各回路素子に効率的に当てることができるため、上側収容空間S2を効率的に冷却することができる。
【0031】
次に、本実施形態の効果を以下に記載する。
(1)本実施形態によれば、筐体2内に平板状の隔壁60を設けた。これによって、隔壁60の上面60aや下面等に各部材を設置することができるようになるため、筐体2内に設けられる各部材の設置スペースを増大させることができる。また、各部材の設置の自由度を向上させることができる。
【0032】
(2)本実施形態によれば、発熱源(モータドライバ40及び各スイッチング電源ボード70,72等)を下側収容空間S1と上側収容空間S2に分けて配設するようにした。また、下側収容空間S1及び上側収容空間S2に冷却ファン46,74をそれぞれ設けた。従って、各冷却ファン46,74による冷却風を各回路素子に効率的に当てることができるため、下側収容空間S1及び上側収容空間S2を効率的に冷却することができる。その結果、筐体2内全体を効率的に冷却することができる。
【0033】
(3)本実施形態によれば、その駆動制御ボード20の突出部上面20aに、電力用接続ケーブル26及び信号用接続ケーブル28の基端のケーブル側電力用コネクタ30及びケーブル側信号用コネクタ32がそれぞれ接続されるボード側電力用コネクタ22及びボード側信号用コネクタ24を形成した。これによって、電力用接続ケーブル26及び信号用接続ケーブル28を、駆動制御ボード20に直接コネクタ接続することができる。そのため、通常、ボード側電力用コネクタ22及びボード側信号用コネクタ24の基端から筐体2内に延びる内部配線を省略することができる。従って、筐体2内の構造を単純にすることができ、筐体2を小型化することができる。
【0034】
(4)本実施形態によれば、前面板8に段差部8aを形成して、その段差部8aの上面8dの貫通穴34及び貫通穴36をそれぞれ貫通するボード側電力用コネクタ22及びボード側信号用コネクタ24に、電力用接続ケーブル26及び信号用接続ケーブル28の基端のコネクタ30,32をそれぞれ接続するようにした。これによって、電力用接続ケーブル26及び信号用接続ケーブル28を、前面板8の面8bに対して平行に配設することができる。従って、ケーブル径が太く曲げにくい電力用接続ケーブル26及び信号用接続ケーブル28の筐体2からの張り出しを好適に抑制することができる。その結果、電力用接続ケーブル26及び信号用接続ケーブル28の配線も含めたロボットコントローラ1の設置スペースを小さくすることができる。
【0035】
なお、上記実施形態は、以下の態様に変更してもよい。
・上記実施形態では、筐体2内の略上下中央に隔壁60を設けるようにした。これに限らず、隔壁60の配設される位置及び隔壁60の大きさは特に制限されない。また、筐体2内に隔壁を複数設けるようにしてもよい。
【0036】
・上記実施形態では、上側収容空間S2に冷却ファン74を設けたが、この冷却ファン74を省略するようにしてもよい。
・上記実施形態では、4つのモータドライバ40を、その右側面40aが冷却ファン46に対して対向するように、且つ平行になるように配設した。これに限らず、4つのモータドライバ40を全て下側収容空間S1に配置するようにすればよい。
【0037】
・上記実施形態では、熱源(モータドライバ40及び各スイッチング電源ボード70,72等)を下側収容空間S1及び上側収容空間S2に分けて配設するようにしたが、これらの部材の配設位置は特に制限されない。例えば、モータドライバ40を上側収容空間S2に集中配置してもよい。また、モータドライバ40を下側収容空間S1及び上側収容空間S2に分散して配置してもよい。なお、この場合、下側収容空間S1及び上側収容空間S2に設けた冷却ファン46,74を省略してもよい。
【0038】
・上記実施形態では、駆動制御ボード20を、筐体2の左側板4の前面4aから突出させるように形成したが、これに限らず、駆動制御ボード20を筐体2内に収納するようにしてもよい。
【0039】
・上記実施形態では、電力用接続ケーブル26及び信号用接続ケーブル28を個々に構成するように具体化したが、これに限らず、例えば電力用接続ケーブル26及び信号用接続ケーブル28を束ねて、共通のコネクタに接続するようにしてもよい。
【0040】
・上記実施形態では、ロボットコントローラ1にパーソナルコンピュータPC及びティーチングペンダントTPを接続するようにしたが、これに制限されない。例えば、パーソナルコンピュータPC及びティーチングペンダントTPの他に、非常停止スイッチやプログラマブル・ロジック・コントローラ等をロボットコントローラ1に接続するようにしてもよい。
【0041】
・上記実施形態では、ロボットRBを4軸制御の水平多関節型の産業用ロボットに具体化したが、これに限らず、例えば単軸〜3軸制御の産業用ロボットや5軸以上の産業用ロボット(例えば、6軸制御の垂直多関節型の産業用ロボット)に変更してもよい。この場合、ロボットRBに搭載されるモータに応じたモータドライバ40を内蔵することのできるロボットコントローラに変更する。
【図面の簡単な説明】
【0042】
【図1】本実施形態におけるロボットとロボットコントローラの配線を説明するための斜視図。
【図2】同じく、ロボットコントローラの筐体の内部構造を説明するための分解斜視図。
【図3】同じく、ロボットコントローラの筐体の内部構造を説明するための分解斜視図。
【符号の説明】
【0043】
RB…ロボット、S1…下側収容空間、S2…上側収容空間、W1〜W4…放熱機構を構成する通気口、1…ロボットコントローラ、2…筐体、3…ベース部、3a…前面取付面、4…左側板、4a…前面、5…右側板、5a…前面、8…前面板、8a…段差部、8b…面、8e…下面、20…駆動制御ボード、20a…突出面としての突出部上面、26…電力用接続ケーブル、28…信号用接続ケーブル、40…アクチュエータ駆動ボードとしてのモータドライバ、40a…一側面としての右側面、46,74…冷却ファン、60…隔壁、60a…上面、70…第1スイッチング電源ボード、72…第2スイッチング電源ボード。
【技術分野】
【0001】
本発明は、ロボット制御装置に関する。
【背景技術】
【0002】
従来より、産業用ロボットは、ロボットに搭載されたモータに電力を供給するための電力用ケーブルや動作制御に必要な情報を伝送する信号用ケーブル等の接続ケーブルを介してロボット制御装置と電気的に接続されている。そして、これらの接続ケーブルを介して、ロボット制御装置が動作指令を産業用ロボットに与えることにより、産業用ロボットに任意の動作を行わせている(特許文献1参照)。
【特許文献1】特開平11−188686号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところで、特許文献1に記載のロボット制御装置では、筐体の大きさが決まると、自ずと筐体に内蔵されて産業用ロボットに搭載されるモータを駆動するためのモータドライバ等の各部材を設置することができる設置スペースも決まってしまう。そのため、各部材の設置の自由度が制限されてしまっていた。
【0004】
本発明は、前述した上記問題点を解消するためになされたものであって、その目的は、各部材の設置の自由度を向上させることができるロボット制御装置を提供することにある。
【課題を解決するための手段】
【0005】
本発明のロボット制御装置は、産業用ロボットと接続ケーブルを介して電気的に接続されて、同産業用ロボットの動作を制御するロボット制御装置において、筐体に隔壁を形成して複数の収容空間を形成し、その複数の収容空間に、発熱源となる回路素子を実装した複数のボードを区分けして配置するとともに、それぞれ前記ボードを配置した収容空間毎に放熱機構を配置した。
【0006】
本発明のロボット制御装置によれば、筐体に形成した隔壁によって複数の収容空間が形成されるため、設置スペースを増大させることができる。従って、各部材の設置の自由度を向上させることができる。また、複数の収容空間に発熱源である複数のボードを区分けして配置し、さらにその収容空間に放熱機構を設けた。そのため、発熱源を分散することができ、さらに放熱機構によってその発熱源を効率良く放熱させることができるため、筐体内の温度上昇を好適に抑制することができる。
【0007】
このロボット制御装置において、前記ボードを配置した収容空間毎に、冷却ファンをさらに設けるようにしてもよい。
このロボット制御装置によれば、冷却ファンによって、ボードを配置した収容空間を冷却することができるため、筐体内の温度上昇をより好適に抑制することができる。
【0008】
このロボット制御装置において、前記複数の収容空間の内、1つの収容空間に前記産業用ロボットに搭載されるアクチュエータを駆動させるアクチュエータ駆動ボードを集中配置し、少なくとも同収容空間に冷却ファンを設けるようにしてもよい。
【0009】
このロボット制御装置によれば、発熱量の最も多いアクチュエータ駆動ボードを1つの収容空間に集中配置し、その収容空間に冷却ファンを設けた。そのため、その冷却ファン
によってアクチュエータ駆動ボードを冷却することができる。従って、アクチュエータ駆動ボードを配置した収容空間に冷却ファンを設けることによって、発熱量の最も多い発熱源を冷却することができるため、筐体内の温度上昇を好適に抑制することができる。
【0010】
このロボット制御装置において、前記冷却ファンは、全ての前記アクチュエータ駆動ボードの一側面に対して対向且つ平行になるように配設してもよい。
このロボット制御装置によれば、アクチュエータ駆動ボードを冷却ファンの放熱方向に沿って配設することができるため、アクチュエータ駆動ボードをより効率的に冷却することができる。
【0011】
このロボット制御装置において、前記産業用ロボットのアクチュエータを駆動させるアクチュエータ駆動ボードを制御する駆動制御ボードを前記筐体から突出させて、その突出面に前記筐体の一側面を載置し、前記突出面に前記接続ケーブルを接続してもよい。
【0012】
このロボット制御装置によれば、駆動制御ボードの突出面に接続ケーブルを接続するようにしたため、駆動制御ボードに直接接続ケーブルを接続することができる。従って、接続ケーブルを筐体内で引き回す必要がないため、筐体内の構造を単純化することができる。
【発明を実施するための最良の形態】
【0013】
以下、本発明を具体化した一実施形態を図1〜図3に従って説明する。図1は、ロボットRBとロボットコントローラ1との配線を説明するための斜視図、図2及び図3は、ロボットコントローラ1の筐体2の内部構造を説明するための分解斜視図である。なお、図2及び図3では、ボード等に実装されるコンデンサ等の回路素子の図示を省略している。
【0014】
図1において、ロボットRBは、4軸制御の水平多関節型の産業用ロボットであって、ロボットコントローラ1によって駆動制御されている。ロボットコントローラ1の筐体2は、前面取付面3aを有するベース部3と、左右両側板4,5と、ベース部3と相対向する天板6と、背板7と、背板7と相対向する前面板8とによって、略直方体状の箱体が形成されている。
【0015】
図2に示すように、ベース部3の前面取付面3aには、ベース側インターフェースコネクタ12,13が取着されるとともに、そのベース側インターフェースコネクタ12,13は、ベース部3の内側面に設けられたCPUボード(図示しない)に電気的に接続されている。ベース側インターフェースコネクタ12,13は、その長手方向が水平になるように取着されるとともに、図1に示すように、先端がパーソナルコンピュータPC及びティーチングペンダントTPに接続された接続ケーブル14,15の基端のケーブル側インターフェースコネクタ16,17とそれぞれ電気的に接続される。そして、ベース側インターフェースコネクタ12,13には、パーソナルコンピュータPC及びティーチングペンダントTPからロボットRBの情報や教示データ等のロボットRBを駆動させるための駆動情報信号が入力されるようになっている。そして、ベース側インターフェースコネクタ12,13は、パーソナルコンピュータPC及びティーチングペンダントTPから入力された駆動情報信号をCPUボードに出力するようになっている。
【0016】
また、図2に示すように、ベース部3の上側に形成された突出部3bは、先端がクランク状に折り曲げ形成されるとともに、その突出部3bの上面には、駆動制御ボード20が載置されている。また、駆動制御ボード20は、さらに前記CPUボードの上面に載置されるとともに、CPUボードと駆動制御ボード20とは、CPUボードと駆動制御ボード20とに設けられた図示しないコネクタによって電気的に接続されている。なお、CPUボードは、パーソナルコンピュータPC及びティーチングペンダントTPから入力された
駆動情報信号に基づいて位置指令信号を生成して、その位置指令信号を駆動制御ボード20に出力するようになっている。
【0017】
筐体2の左側板4及び右側板5の前面4a,5aから突出した駆動制御ボード20の突出面としての突出部上面20aの右寄りには、ボード側電力用コネクタ22が取着されている。また、駆動制御ボード20の突出部上面20aであって、ボード側電力用コネクタ22の左側には、ボード側信号用コネクタ24が取着されている。ボード側電力用コネクタ22及びボード側信号用コネクタ24は、その長手方向が突出部上面20aの長手方向に沿って取着されている。ボード側電力用コネクタ22及びボード側信号用コネクタ24は、図1に示すように、先端が前記ロボットRBに接続された電力用接続ケーブル26及び信号用接続ケーブル28の基端のケーブル側電力用コネクタ30及びケーブル側信号用コネクタ32とそれぞれ電気的に接続される。
【0018】
詳しくは、図2に示すように、前面板8には、下側をクランク状に折り曲げ形成した段差部8aと、段差部8aを挟んだ上下の面8b,8cとが形成されている。段差部8aの上面8dには、ボード側電力用コネクタ22が貫通する貫通穴34と、ボード側信号用コネクタ24が貫通する貫通穴36とが形成されている。段差部8aの下面8eを駆動制御ボード20の突出部上面20aに載置して前面板8によって筐体2を閉塞すると、ボード側電力用コネクタ22及びボード側信号用コネクタ24が貫通穴34,36をそれぞれ貫通して外部に露出する。このように外部に露出されたボード側電力用コネクタ22及びボード側信号用コネクタ24に、ケーブル側電力用コネクタ30及びケーブル側信号用コネクタ32がそれぞれ電気的に接続される。この時、ケーブル側電力用コネクタ30及びケーブル側信号用コネクタ32は、その接続部と相対向する向きに向けて、ボード側電力用コネクタ22及びボード側信号用コネクタ24とそれぞれ接続する。
【0019】
これによって、駆動制御ボード20の突出部上面20aに設けたボード側電力用コネクタ22に対して電力用接続ケーブル26がケーブル側電力用コネクタ30を介して接続されるため、電力用接続ケーブル26は、前面板8の面8bに沿って平行に配設されることになる。また、駆動制御ボード20の突出部上面20aに設けたボード側信号用コネクタ24に対して信号用接続ケーブル28がケーブル側信号用コネクタ32を介して接続されるため、信号用接続ケーブル28は、前面板8の面8bに沿って平行に配設されることになる。従って、ケーブル径が太く曲げにくい電力用接続ケーブル26及び信号用接続ケーブル28(ケーブル側電力用コネクタ30及びケーブル側信号用コネクタ32)が筐体2から大きく張り出すのを好適に抑制することができる。また、駆動制御ボード20にボード側電力用コネクタ22及びボード側信号用コネクタ24を直接接続したため、通常、ボード側電力用コネクタ22及びボード側信号用コネクタ24の基端から筐体2内に延びる内部配線を省略することができる。そのため、筐体2内の構造を単純にすることができる。なお、前面板8が筐体2の前面に配設されると、前面板8の面8cは、駆動制御ボード20を覆うように配設されるようになっている。
【0020】
図3に示すように、駆動制御ボード20の上面20bには、ロボットRBの各モータを駆動するための各種回路素子を実装したアクチュエータ駆動ボードとしてのモータドライバ40がモータ毎に設けられている。詳しくは、駆動制御ボード20の上面20bであって、ボード側電力用コネクタ22よりもX矢印方向側には、電力用コネクタ42がX方向に所定の間隔を置いて4つ取着されている。また、その電力用コネクタ42の左隣には、信号用コネクタ44が電力用コネクタ42と同様に、X方向に所定の間隔を置いて4つ取着されている。そして、その電力用コネクタ42及び信号用コネクタ44に、モータドライバ40のコネクタ部C1,C2がそれぞれ電気的に接続される。これによって、駆動制御ボード20とモータドライバ40とが電気的に接続され、駆動制御ボード20によってモータドライバ40が制御されるようになっている。
【0021】
そのモータドライバ40の右方であって、筐体2の右側板5の内側面には、冷却ファン46が設けられている。また、左右両側板4,5であって、その冷却ファン46と対向する位置には、放熱機構を構成する通気口W1,W2がそれぞれ形成されている。そして、冷却ファン46を駆動させることにより、外気が通気口W2から筐体2内に取り込まれ、モータドライバ40及び駆動制御ボード20に実装された各回路素子にて熱せられた筐体2内の空気が通気口W1から筐体2外に放出される。なお、4つのモータドライバ40は、その一側面としての右側面40aが冷却ファン46に対して対向するように、且つ平行になるように配設されている。これによって、冷却ファン46による冷却風を全てのモータドライバ40に効率的に当てることができる。
【0022】
また、筐体2内の左側下側に配置されるように、電源入力端子50が前面板8の裏面の左側下側部に取着される。電源入力端子50には、電源ケーブル52の基端が電気的に接続されて、電源ケーブル52の先端に電気的に接続される外部電源(図示しない)から交流電源が給電されるようになっている。電源入力端子50から延設される内部入力配線(図示しない)は、電源入力端子50よりもX矢印方向側の左側板4の内側面に設けられたノイズフィルタ54に電気的に接続される。ノイズフィルタ54は、筐体2内に設けられた平板状の隔壁60の上面60aの左寄りに設けられたサーキットプロテクタ62と電気的に接続されている。図2に示すように、隔壁60は、筐体2の略上下中央に形成されて、筐体2内を2つの収容空間(隔壁60よりも下側に形成された下側収容空間S1及び隔壁60よりも上側に形成された上側収容空間S2)に分割して2段構造にしている。また、隔壁60の左側には、ノイズフィルタ54と接触しないように切り欠き60bが形成されている。なお、電源ケーブル52と、サーキットプロテクタ62に形成された電源スイッチSWとは、筐体2が前面板8によって閉塞されると、前面板8に形成された貫通溝64及び貫通穴66にそれぞれ貫通するようになっている。
【0023】
天板6の内側面には、主電源ボードDBが取着されている。主電源ボードDBは、サーキットプロテクタ62と図示しない接続ケーブルによって電気的に接続されている。これによって、電源ケーブル52を介して外部電源から給電された交流電源が、主電源ボードDBに給電されるようになっている。主電源ボードDBは、前記CPUボードや駆動制御ボード20に交流電源を分配するようになっている。
【0024】
筐体2の背板7の内側面であって、隔壁60の上面60aには、第1スイッチング電源ボード70が取着されている。第1スイッチング電源ボード70は、上端部が図示しない接続ケーブルによって主電源ボードDBと電気的に接続されるとともに、下端部が図示しない接続ケーブルによって駆動制御ボード20と電気的に接続されている。そして、第1スイッチング電源ボード70は、主電源ボードDBから供給される交流電源から直流電源を生成して、その直流電源を駆動制御ボード20に供給するようになっている。
【0025】
隔壁60の上面60aであって、第1スイッチング電源ボード70の前側には、第2スイッチング電源ボード72が取着されている。第2スイッチング電源ボード72は、主電源ボードDBとCPUボードと図示しない接続ケーブルによって電気的に接続されている。そして、第2スイッチング電源ボード72は、主電源ボードDBから供給される交流電源から直流電源を生成して、その直流電源をCPUボードに供給するようになっている。
【0026】
筐体2の左右両側板4,5であって、前記通気口W1,W2の上側には、通気口W3,W4がそれぞれ形成されている。また、隔壁60の上面60aであって右側板5の内側面には、冷却ファン74が配設されている。そして、冷却ファン74を駆動させることにより、外気が通気口W4から筐体2内に取り込まれ、各ボード70,72に実装された各回路素子にて熱せられた筐体2内の上側収容空間S2の空気が通気口W3から筐体2外に放
出される。
【0027】
このように、筐体2内に隔壁60を設けることによって、筐体2内に設けられる各部材の設置スペースを増大させることができる。また、発熱源(モータドライバ40及び各スイッチング電源ボード70,72等)を下側収容空間S1及び上側収容空間S2にそれぞれ分けて配置することができるため、効率的に冷却ファン46,74による冷却風を各回路素子等に当てることができる。従って、筐体2内を効率的に冷却することができる。
【0028】
次に、上記のように構成したロボットコントローラ1の作用について説明する。
筐体2の略上下中央に隔壁60を設ける。これによって、隔壁60の上面60aや下面にも各部材を設けることができるようになるため、各部材の設置スペースを増大させることができ、各部材の設置の自由度を向上させることができる。また、下側収容空間S1にCPUボードと、そのCPUボードの上面に駆動制御ボード20とを設ける。また、CPUボードと駆動制御ボード20とをコネクタ(図示しない)によって直接接続する。そして、駆動制御ボード20の上面に設けた電力用コネクタ42及び信号用コネクタ44に、モータドライバ40のコネクタ部C1,C2を電気的に接続して、下側収容空間S1にモータドライバ40を集中配置する。これによって、モータドライバ40の右側に設けた冷却ファン46による冷却風を効率的にモータドライバ40に当てることができるため、筐体2内を効率的に冷却することができる。
【0029】
また、駆動制御ボード20を、筐体2の左右両側板4,5の前面4a,5aよりも突出させて形成する。そして、その駆動制御ボード20の突出部上面20aにボード側電力用コネクタ22及びボード側信号用コネクタ24を設けて、そのコネクタ22,24に接続ケーブル26,28の基端のケーブル側電力用コネクタ30及びケーブル側信号用コネクタ32を電気的に接続する。これによって、接続ケーブル26,28が、前面板8の面8bに沿って平行に配設されるため、ケーブル径が太く曲げにくい接続ケーブル26,28(ケーブル側電力用コネクタ30及びケーブル側信号用コネクタ32)が筐体2から大きく張り出すのを好適に抑制することができる。また、駆動制御ボード20にボード側電力用コネクタ22及びボード側信号用コネクタ24を直接接続したため、通常、ボード側電力用コネクタ22及びボード側信号用コネクタ24の基端から筐体2内に延びる内部配線を省略することができる。そのため、筐体2内の構造を単純にすることができる。
【0030】
一方、上側収容空間S2に、第1及び第2スイッチング電源ボード70,72を設ける。また、隔壁60の上面60aであって右側板5の内側面に、冷却ファン74を設ける。これによって、冷却ファン74による冷却風を各回路素子に効率的に当てることができるため、上側収容空間S2を効率的に冷却することができる。
【0031】
次に、本実施形態の効果を以下に記載する。
(1)本実施形態によれば、筐体2内に平板状の隔壁60を設けた。これによって、隔壁60の上面60aや下面等に各部材を設置することができるようになるため、筐体2内に設けられる各部材の設置スペースを増大させることができる。また、各部材の設置の自由度を向上させることができる。
【0032】
(2)本実施形態によれば、発熱源(モータドライバ40及び各スイッチング電源ボード70,72等)を下側収容空間S1と上側収容空間S2に分けて配設するようにした。また、下側収容空間S1及び上側収容空間S2に冷却ファン46,74をそれぞれ設けた。従って、各冷却ファン46,74による冷却風を各回路素子に効率的に当てることができるため、下側収容空間S1及び上側収容空間S2を効率的に冷却することができる。その結果、筐体2内全体を効率的に冷却することができる。
【0033】
(3)本実施形態によれば、その駆動制御ボード20の突出部上面20aに、電力用接続ケーブル26及び信号用接続ケーブル28の基端のケーブル側電力用コネクタ30及びケーブル側信号用コネクタ32がそれぞれ接続されるボード側電力用コネクタ22及びボード側信号用コネクタ24を形成した。これによって、電力用接続ケーブル26及び信号用接続ケーブル28を、駆動制御ボード20に直接コネクタ接続することができる。そのため、通常、ボード側電力用コネクタ22及びボード側信号用コネクタ24の基端から筐体2内に延びる内部配線を省略することができる。従って、筐体2内の構造を単純にすることができ、筐体2を小型化することができる。
【0034】
(4)本実施形態によれば、前面板8に段差部8aを形成して、その段差部8aの上面8dの貫通穴34及び貫通穴36をそれぞれ貫通するボード側電力用コネクタ22及びボード側信号用コネクタ24に、電力用接続ケーブル26及び信号用接続ケーブル28の基端のコネクタ30,32をそれぞれ接続するようにした。これによって、電力用接続ケーブル26及び信号用接続ケーブル28を、前面板8の面8bに対して平行に配設することができる。従って、ケーブル径が太く曲げにくい電力用接続ケーブル26及び信号用接続ケーブル28の筐体2からの張り出しを好適に抑制することができる。その結果、電力用接続ケーブル26及び信号用接続ケーブル28の配線も含めたロボットコントローラ1の設置スペースを小さくすることができる。
【0035】
なお、上記実施形態は、以下の態様に変更してもよい。
・上記実施形態では、筐体2内の略上下中央に隔壁60を設けるようにした。これに限らず、隔壁60の配設される位置及び隔壁60の大きさは特に制限されない。また、筐体2内に隔壁を複数設けるようにしてもよい。
【0036】
・上記実施形態では、上側収容空間S2に冷却ファン74を設けたが、この冷却ファン74を省略するようにしてもよい。
・上記実施形態では、4つのモータドライバ40を、その右側面40aが冷却ファン46に対して対向するように、且つ平行になるように配設した。これに限らず、4つのモータドライバ40を全て下側収容空間S1に配置するようにすればよい。
【0037】
・上記実施形態では、熱源(モータドライバ40及び各スイッチング電源ボード70,72等)を下側収容空間S1及び上側収容空間S2に分けて配設するようにしたが、これらの部材の配設位置は特に制限されない。例えば、モータドライバ40を上側収容空間S2に集中配置してもよい。また、モータドライバ40を下側収容空間S1及び上側収容空間S2に分散して配置してもよい。なお、この場合、下側収容空間S1及び上側収容空間S2に設けた冷却ファン46,74を省略してもよい。
【0038】
・上記実施形態では、駆動制御ボード20を、筐体2の左側板4の前面4aから突出させるように形成したが、これに限らず、駆動制御ボード20を筐体2内に収納するようにしてもよい。
【0039】
・上記実施形態では、電力用接続ケーブル26及び信号用接続ケーブル28を個々に構成するように具体化したが、これに限らず、例えば電力用接続ケーブル26及び信号用接続ケーブル28を束ねて、共通のコネクタに接続するようにしてもよい。
【0040】
・上記実施形態では、ロボットコントローラ1にパーソナルコンピュータPC及びティーチングペンダントTPを接続するようにしたが、これに制限されない。例えば、パーソナルコンピュータPC及びティーチングペンダントTPの他に、非常停止スイッチやプログラマブル・ロジック・コントローラ等をロボットコントローラ1に接続するようにしてもよい。
【0041】
・上記実施形態では、ロボットRBを4軸制御の水平多関節型の産業用ロボットに具体化したが、これに限らず、例えば単軸〜3軸制御の産業用ロボットや5軸以上の産業用ロボット(例えば、6軸制御の垂直多関節型の産業用ロボット)に変更してもよい。この場合、ロボットRBに搭載されるモータに応じたモータドライバ40を内蔵することのできるロボットコントローラに変更する。
【図面の簡単な説明】
【0042】
【図1】本実施形態におけるロボットとロボットコントローラの配線を説明するための斜視図。
【図2】同じく、ロボットコントローラの筐体の内部構造を説明するための分解斜視図。
【図3】同じく、ロボットコントローラの筐体の内部構造を説明するための分解斜視図。
【符号の説明】
【0043】
RB…ロボット、S1…下側収容空間、S2…上側収容空間、W1〜W4…放熱機構を構成する通気口、1…ロボットコントローラ、2…筐体、3…ベース部、3a…前面取付面、4…左側板、4a…前面、5…右側板、5a…前面、8…前面板、8a…段差部、8b…面、8e…下面、20…駆動制御ボード、20a…突出面としての突出部上面、26…電力用接続ケーブル、28…信号用接続ケーブル、40…アクチュエータ駆動ボードとしてのモータドライバ、40a…一側面としての右側面、46,74…冷却ファン、60…隔壁、60a…上面、70…第1スイッチング電源ボード、72…第2スイッチング電源ボード。
【特許請求の範囲】
【請求項1】
産業用ロボットと接続ケーブルを介して電気的に接続されて、同産業用ロボットの動作を制御するロボット制御装置において、
筐体に隔壁を形成して複数の収容空間を形成し、その複数の収容空間に、発熱源となる回路素子を実装した複数のボードを区分けして配置するとともに、それぞれ前記ボードを配置した収容空間毎に放熱機構を配置したことを特徴とするロボット制御装置。
【請求項2】
請求項1に記載のロボット制御装置において、
前記ボードを配置した収容空間毎に、冷却ファンをさらに設けたことを特徴とするロボット制御装置。
【請求項3】
請求項1に記載のロボット制御装置において、
前記複数の収容空間の内、1つの収容空間に前記産業用ロボットに搭載されるアクチュエータを駆動させるアクチュエータ駆動ボードを集中配置し、少なくとも同収容空間に冷却ファンを設けたことを特徴とするロボット制御装置。
【請求項4】
請求項3に記載のロボット制御装置において、
前記冷却ファンは、全ての前記アクチュエータ駆動ボードの一側面に対して対向且つ平行になるように配設したことを特徴とするロボット制御装置。
【請求項5】
請求項1〜4のいずれか1つに記載のロボット制御装置において、
前記産業用ロボットのアクチュエータを駆動させるアクチュエータ駆動ボードを制御する駆動制御ボードを前記筐体から突出させて、その突出面に前記筐体の一側面を載置し、前記突出面に前記接続ケーブルを接続したことを特徴とするロボット制御装置。
【請求項1】
産業用ロボットと接続ケーブルを介して電気的に接続されて、同産業用ロボットの動作を制御するロボット制御装置において、
筐体に隔壁を形成して複数の収容空間を形成し、その複数の収容空間に、発熱源となる回路素子を実装した複数のボードを区分けして配置するとともに、それぞれ前記ボードを配置した収容空間毎に放熱機構を配置したことを特徴とするロボット制御装置。
【請求項2】
請求項1に記載のロボット制御装置において、
前記ボードを配置した収容空間毎に、冷却ファンをさらに設けたことを特徴とするロボット制御装置。
【請求項3】
請求項1に記載のロボット制御装置において、
前記複数の収容空間の内、1つの収容空間に前記産業用ロボットに搭載されるアクチュエータを駆動させるアクチュエータ駆動ボードを集中配置し、少なくとも同収容空間に冷却ファンを設けたことを特徴とするロボット制御装置。
【請求項4】
請求項3に記載のロボット制御装置において、
前記冷却ファンは、全ての前記アクチュエータ駆動ボードの一側面に対して対向且つ平行になるように配設したことを特徴とするロボット制御装置。
【請求項5】
請求項1〜4のいずれか1つに記載のロボット制御装置において、
前記産業用ロボットのアクチュエータを駆動させるアクチュエータ駆動ボードを制御する駆動制御ボードを前記筐体から突出させて、その突出面に前記筐体の一側面を載置し、前記突出面に前記接続ケーブルを接続したことを特徴とするロボット制御装置。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2007−144588(P2007−144588A)
【公開日】平成19年6月14日(2007.6.14)
【国際特許分類】
【出願番号】特願2005−344652(P2005−344652)
【出願日】平成17年11月29日(2005.11.29)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
【公開日】平成19年6月14日(2007.6.14)
【国際特許分類】
【出願日】平成17年11月29日(2005.11.29)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
[ Back to top ]