
ロボット及びロボットの制御方法
【課題】慣性センサーの出力には基準電位のドリフトやノイズなどの誤差が含まれており、このような情報を利用して制御を行うと正しく制御を行えない可能性や安定性を損なうという課題がある。
【解決手段】アーム21を回動させるアーム駆動機構23と、アーム駆動機構23の回動角度を検出して角度情報を出力する角度センサー34と、アーム21に取り付けられており、アーム21に作用する角速度を検出して角速度情報を出力する角速度センサー32と、アーム21の回動動作を規定する制御指令値を出力する制御指令発生部301と、角速度情報のゲインを漸次変化させて調整するゲイン調整部302と、制御指令値、角度情報、及びゲインを調整された角速度情報に基づいてアーム21の動作を制御するアーム動作制御部303と、を備える。
【解決手段】アーム21を回動させるアーム駆動機構23と、アーム駆動機構23の回動角度を検出して角度情報を出力する角度センサー34と、アーム21に取り付けられており、アーム21に作用する角速度を検出して角速度情報を出力する角速度センサー32と、アーム21の回動動作を規定する制御指令値を出力する制御指令発生部301と、角速度情報のゲインを漸次変化させて調整するゲイン調整部302と、制御指令値、角度情報、及びゲインを調整された角速度情報に基づいてアーム21の動作を制御するアーム動作制御部303と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ロボット及びロボットの制御方法に関する。
【背景技術】
【0002】
従来から、アームを回動等させることによりアームの先端に取り付けられた端末装置を所望の位置に移動させ、当該位置において端末装置を稼動させるロボットなどが知られている。例えば、把持端末を備えて加工装置に対して被加工部材を給除材する給除材装置や、塗装端末を備えた塗装ロボットや、溶接端末を備えた溶接ロボットなどが知られている。
【0003】
ロボットを駆動させる際には、ロボットのアームを駆動するモーターなどの駆動源の回動角度を測定し、測定した角度情報に基づいてアームの先端側の位置などを制御する制御方法が用いられている。しかし、駆動源からアームに駆動力を伝達する伝達機構や、アームは剛体ではないことに起因して、伝達機構やアームが変形することがある。この伝達機構やアームの変形により、アームに振動が生ずるという問題があった。この問題に対し、アーム先端に慣性センサーを取り付けて先端の動きを測定し、得られた慣性センサーによる角速度情報を制御に用いる方法が考案されている。特許文献1には、慣性センサーの出力信号によってアームの動作を制御することにより、振れによる精度低下を防止することができる多関節ロボットの制御方法及び多関節ロボットが開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平7−9374号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1の場合、慣性センサーの出力には基準電位のドリフトやノイズなどの誤差が含まれており、このような情報を利用して制御を行うと正しく制御を行えない可能性や安定性を損なうという課題があった。
【課題を解決するための手段】
【0006】
本発明は、上述の課題の少なくとも一部を解決するためになされたものであり、以下の形態又は適用例として実現することが可能である。
【0007】
[適用例1]一端を回動可能に支持されたアームと、前記アームを回動させる駆動源と、前記駆動源の回動角度を検出して角度情報を出力する角度センサーと、前記アームに取り付けられており、前記アームに作用する慣性力を検出して慣性力情報を出力する慣性センサーと、前記アームの回動動作を規定する制御指令値を出力する制御指令発生部と、前記慣性力情報の重み付け値を漸次変化させて調整する重み付け調整部と、前記制御指令値、前記角度情報、及び前記重み付け値によって重み付けされた前記慣性力情報に基づいて前記アームの動作を制御するアーム動作制御部と、を備えることを特徴とするロボット。
【0008】
上記したロボットによれば、重み付け調整部が、慣性力情報の重み付け値を漸次変化させる。そして、アーム動作制御部が、制御指令値、角度情報、及び漸次変化させた重み付け値によって重み付けされた慣性力情報に基づいてアームの動作を制御する。これにより、慣性力情報の急激な変化に伴うアームの振動や、駆動源や減速機に対しての機械的負荷による機械寿命への悪影響を抑制することができる。
【0009】
[適用例2]前記重み付け調整部は、前記アームが停止状態から回動状態に移行する場合に前記慣性力情報の重み付け値を漸次増加させる調整と、前記アームが回動状態から停止状態に移行する場合に前記慣性力情報の重み付け値を漸次減少させる調整との、少なくとも1つの調整を行うことを特徴とする上記ロボット。
【0010】
上記したロボットによれば、アームが停止状態から回動状態に移行する場合に、慣性力情報の重み付け値を漸次増加させる調整を行うことができる。これにより、慣性力情報を用いない状態から慣性力情報を用いて位置決めする状態に移行する際に、慣性力情報の急激な変化を抑制することができる。また、アームが回動状態から停止状態に移行する場合に、慣性力情報の重み付け値を漸次減少させる調整を行うことができる。これにより、慣性力情報を用いた状態から慣性力情報を用いないで位置決めする状態に移行する際に、慣性力情報の急激な変化を抑制することができる。
【0011】
[適用例3]前記重み付け調整部は、時間の経過に伴い前記重み付けの変化幅を大きくさせることを特徴とする上記ロボット。
【0012】
上記したロボットによれば、時間の経過に伴い重み付けの変化幅を大きくさせることにより、始めは慣性力情報の変化幅を小さくし、後になるほど慣性力情報の変化幅を大きくすることができる。これにより、アームの振動の変化幅が少ない状態から多い状態に移行する際は、始めは慣性力情報の利用を少なくして、後になるほど急に、慣性力情報の利用を多くすることができる。一方、アームの振動の変化幅が多い状態から少ない状態に移行する際は、始めは慣性力情報の利用を多くして、後になるほど急に、慣性力情報の利用を少なくすることができる。つまり、時間の経過に伴って、アームの振動の変化幅に応じて適切に重み付けした慣性力情報を用いることができる。
【0013】
[適用例4]前記重み付け調整部は、前記アームの回動による前記アームの振動周期の半分以上の時間、前記重み付け値を変化させることを特徴とする上記ロボット。
【0014】
上記したロボットによれば、回動によるアームの振動周期の半分以上の時間、重み付け値を変化させる。これにより、アームの振動の変化幅が大きい場合でも、当該変化幅への対応に要する時間以上に重み付け値を変化させることができ、慣性力情報の急激な変化を抑制することができる。
【0015】
[適用例5]前記重み付け調整部は、前記慣性力情報と当該慣性力情報について予め設定された閾値とを比較して前記重み付け値を変化させることを特徴とする上記ロボット。
【0016】
上記したロボットによれば、慣性力情報と、予め設定された閾値とを比較して重み付け値を変化させる。これにより、ノイズなどによる慣性力情報の誤差の影響を基に慣性力情報の閾値を設定し、慣性力情報と当該閾値とを比較して重み付け値を変化させることができ、誤差を抑制した慣性力情報を利用することができる。
【0017】
[適用例6]前記重み付け調整部は、前記角度情報と当該角度情報について予め設定された閾値とを比較して前記重み付け値を変化させるこことを特徴とする上記ロボット。
【0018】
上記したロボットによれば、角度情報と、予め設定された閾値とを比較して重み付け値を変化させる。これにより、ノイズなどによる角度情報の誤差の影響を基に角度情報の閾値を設定し、角度情報と当該閾値とを比較して重み付け値を変化させることができ、誤差を抑制した角度情報を利用することができる。
【0019】
[適用例7]前記重み付け調整部は、前記制御指令値が規定する前記アームの回動動作の停止時点からの経過時間と、前記経過時間について予め設定された閾値とを比較して前記重み付け値を変化させるこことを特徴とする上記ロボット。
【0020】
上記したロボットによれば、制御指令値が規定するアームの回動動作の停止時点からの経過時間と、予め設定された閾値とを比較して重み付け値を変化させる。これにより、ノイズなどによる慣性力情報の誤差の影響を基に経過時間の閾値を設定し、実際の経過時間と当該閾値とを比較して重み付け値を変化させることができ、誤差を抑制した慣性力情報を用いることができる。
【0021】
[適用例8]一端を回動可能に支持されたアームと、前記アームを回動させる駆動源と、前記駆動源の回動角度を検出して角度情報を出力する角度センサーと、前記アームに取り付けられており、前記アームに作用する慣性力を検出して慣性力情報を出力する慣性センサーと、前記アームの回動動作を規定する制御指令値を出力する制御指令発生工程と、前記慣性力情報の重み付け値を漸次変化させて調整する重み付け調整工程と、前記制御指令値、前記角度情報、及び前記重み付け値によって重み付けされた前記慣性力情報に基づいて前記アームの動作を制御するアーム動作制御工程と、を備えることを特徴とするロボットの制御方法。
【0022】
上記したロボットの制御方法によれば、重み付け調整工程において、慣性力情報の重み付け値を漸次変化させる。そして、アーム動作制御工程において、制御指令値、角度情報、及び漸次変化させた重み付け値によって重み付けされた慣性力情報に基づいてアームの動作を制御する。これにより、慣性力情報の急激な変化に伴うアームの振動や、駆動源や減速機に対しての機械的負荷による機械寿命への悪影響を抑制することができる。
【図面の簡単な説明】
【0023】
【図1】第1実施形態に係るロボットの概略構成を示す外観斜視図。
【図2】ロボット機構を駆動させる機能的構成を示すブロック図。
【図3】アーム駆動モーターの駆動を制御することにより、アームを回動させる工程を示すフローチャート。
【図4】アームを回動させる間における角速度のゲイン調整の例を説明するための図であり、(a)は時間経過と角速度との関係を示す図、(b),(c)は時間経過とゲインとの関係を示す図。
【図5】アームが停止する間際におけるゲイン調整の例を説明するための図であり、(a)は時間経過と角速度との関係を示す図、(b),(c)は時間経過とゲインとの関係を示す図。
【図6】アームが停止する間際において、ゲインを目標値の状態から0の状態に減少させるまでの時間経過を説明するための図であり、(a)は時間経過と角速度の関係を示す図、(b)は時間経過とゲインの関係を示す図。
【図7】アームが停止する間際におけるゲイン調整の実測値の例を示す図。
【図8】角速度の閾値を用いてゲイン調整を行う例を説明するための図であり、(a)は時間経過と角速度との関係を示す図、(b)はアームが停止する間際における図(a)の拡大図。
【図9】角度の閾値を用いてゲイン調整を行う例を説明するための図であり、(a)は時間経過と角度との関係を示す図、(b)は、アームが停止する間際における(a)の拡大図である。
【図10】制御指令値の特徴点をもとに時間軸における閾値を用いてゲイン調整を行う例を説明するための図であり、(a)は時間経過と角速度との関係を示す図、(b)はアーム21が停止する間際における(a)の拡大図。
【図11】制御指令値の特徴点をもとに角速度の閾値を用いてゲイン調整を行う例を説明するための図であり、(a)は時間経過と角速度との関係を示す図、(b)はアームが停止する間際における(a)の拡大図。
【図12】第3実施形態に係るロボットの概略構成を示す外観斜視図。
【図13】搬送装置の概略構成を示す外観斜視図。
【図14】レーザープリンターの要部の概略構成を示す説明図。
【発明を実施するための形態】
【0024】
(第1実施形態)
以下、第1実施形態に係るロボットについて、図面を参照して説明する。なお、以下の図面においては、図面を見易くするため、各構成要素の寸法や比率などは適宜異ならせてある。
【0025】
<ロボットの概略構成>
ロボット10の概略構成について説明する。
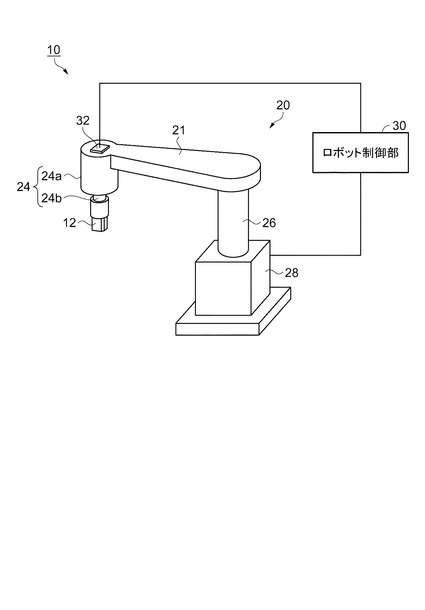
図1は、第1実施形態に係るロボット10の概略構成を示す外観斜視図である。同図に示すように、ロボット10は、ロボット機構20とロボット制御部30とにより構成されている。ロボット機構20は、保持ハンド12、ハンド保持機構24、アーム21、アーム軸部26、機台28、角速度センサー32、角度センサー34(図2参照)等を備えている。ロボット10は、水平に回動可能な1本のアーム21を備えた、いわゆるスカラーロボットである。
【0026】
機台28は、内蔵する軸受機構(図示略)を介して、アーム軸部26をアーム軸部26の回動軸回りに回動自在に支持している。アーム軸部26は、機台28に内蔵されたアーム駆動モーター22(図2参照)とアーム駆動機構23(図2参照)とを介して機台28に接続されており、アーム駆動モーター22によって回動させられる。アーム駆動モーター22には角度センサー34が接続されており、角度センサー34によってアーム駆動モーター22の回動角度が測定(検出)される。
【0027】
アーム軸部26において機台28に支持された側と反対側の端には、アーム21の一端が固定されている。アーム21は、アーム駆動モーター22により、アーム軸部26の回動軸を中心に回動させられる。アーム21の回動角度は、角度センサー34によってアーム駆動モーター22の回動角度を測定することによって近似的に測定される。
【0028】
アーム21においてアーム軸部26に固定された反対側の端には、ハンド保持機構24が固定されている。ハンド保持機構24は、アーム21に固定された保持軸受24aと、保持軸受24aに摺動自在に支持された保持機構軸24bとを備えている。保持機構軸24bは、図示しない上下駆動源により、保持軸受24aに対して保持機構軸24bの軸方向に摺動可能である。また、保持機構軸24bの軸方向は、アーム軸部26の軸方向と略平行である。
【0029】
保持機構軸24bの自由端には、保持ハンド12が取り付けられている。そして、アーム21を回動させることにより、保持ハンド12を搬送対象物に臨む位置に位置させる。保持軸受24aに対して保持機構軸24bを摺動させることにより、保持ハンド12を搬送対象物に離接させると共に、保持ハンド12によって保持した搬送対象物を、載置場所から持ち上げたり、載置場所に接近させたりする。
【0030】
保持ハンド12が取り付けられているハンド保持機構24には、保持ハンド12と反対側に角速度センサー32が固定されている。角速度センサー32は、アーム21の先端に固定されており、アーム21が回動させられる角速度を測定(検出)可能である。
ロボット制御部30は、情報入出力装置(図示略)を介して予め入力された制御プログラムに基づいて、ロボット10の各部の動作を統括制御する。
【0031】
<ロボット機構駆動の機能的構成>
次に、ロボット機構20を駆動させる機能的構成について説明する。
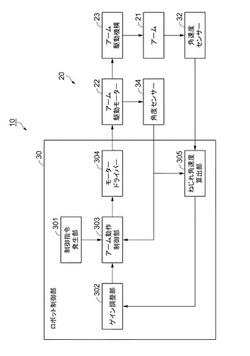
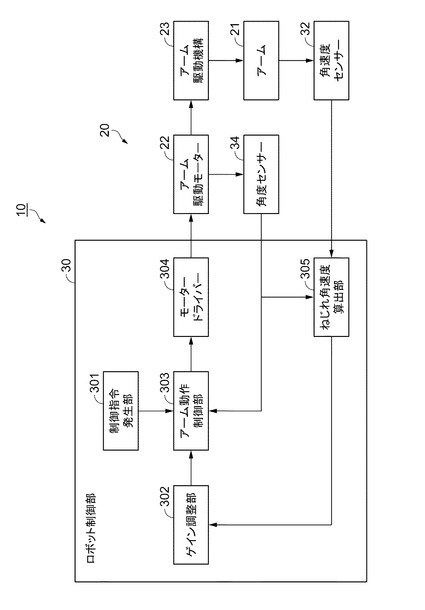
図2は、ロボット機構20を駆動させる機能的構成を示すブロック図である。同図に示すように、ロボット10は、アーム21を回動させるために、駆動源としてのアーム駆動モーター22、アーム駆動機構23、角速度センサー32、角度センサー34、及びロボット制御部30を備えている。ここで、角速度センサー32としては、例えばジャイロセンサーを用いることができる。また、角度センサー34としては、例えばエンコーダーを用いることができる。
【0032】
ロボット制御部30は、制御指令発生部301、ゲイン調整部302、アーム動作制御部303、モータードライバー304、ねじれ角速度算出部305等を備えている。
制御指令発生部301は、給材又は除材の稼動指令に基づくロボット機構20への動作指令を実行するため、アーム21の回動動作を規定する制御指令値を出力する。ここで、給材又は除材の稼動指令は、図示しない入力装置からロボット10に入力される。そして、稼動指令に基づくロボット機構20の動作指令は、ロボット制御部30が備える統括制御部(図示略)から制御指令発生部301に出力される。そして、制御指令発生部301が出力するアーム21の制御指令値は、例えば、アーム21の先端の軌道が時間毎のアーム21の角度として示される。
【0033】
アーム動作制御部303は、制御指令発生部301が出力するアーム21の制御指令値を実行するためのアーム駆動モーター22の制御信号を出力する。このとき、アーム動作制御部303は、アーム21の制御指令値を実行するために最適なアーム駆動モーター22の制御信号を、角度センサー34からの角度情報、及び角速度センサー32からの角速度情報に基づいて、生成して出力する。なお、角速度センサー32は慣性センサーに相当し、角速度情報は慣性力情報に相当する。
【0034】
ねじれ角速度算出部305は、角度センサー34からの角度情報と、角速度センサー32からの角速度情報との差に基づいて、ねじれの成分であるねじれ角速度を算出する。ゲイン調整部302は、算出されたねじれ角速度に基づいて、角速度情報を補正する目標値となるゲインを決定する。そして、後述する所定のタイミングで、角速度情報に対しての補正量を調整するゲイン調整を行う。なお、ゲイン調整部302は、重み付け調整部に相当し、ゲインは、重み付け値に相当する。
【0035】
モータードライバー304は、アーム駆動モーター22に電力を供給することにより、アーム駆動モーター22を制御する。
【0036】
<アーム21の回動工程>
次に、アーム駆動モーター22の駆動を制御することにより、アーム21を回動させてアーム21の先端に取り付けられている保持ハンド12を所定位置に位置させる工程について説明する。
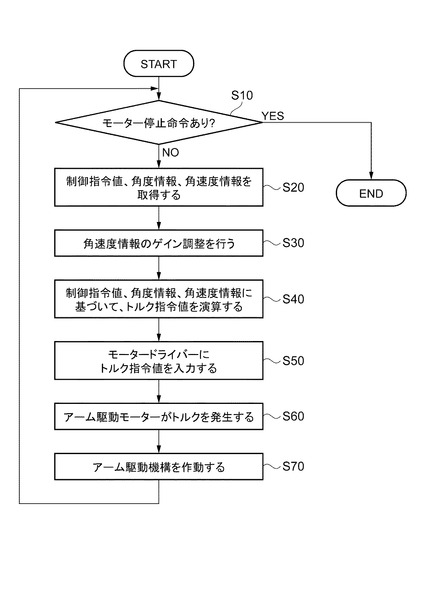
図3は、アーム駆動モーター22の駆動を制御することにより、アーム21を回動させる工程を示すフローチャートである。
【0037】
最初に、ロボット10は、モーター停止命令の有無を判定する(ステップS10)。モーター停止命令は、アーム駆動モーター22を停止させて、アーム駆動モーター22の制御を終了させる指令である。
【0038】
モーター停止命令が有った場合(ステップS10:YES)は、アーム駆動モーター22の駆動を停止し、保持ハンド12を所定位置に位置させる工程を終了する。
他方、モーター停止命令が無い場合(ステップS10:NO)は、次のステップS20に進む。
【0039】
ステップS20では、ロボット10は、アーム動作制御部303により、制御指令値、角度情報、及び角速度情報を取得する。詳細には、制御指令発生部301から出力された制御指令値がアーム動作制御部303に入力される。また、アーム駆動モーター22に接続された角度センサー34により、アーム駆動モーター22の回動角度が測定されて角度情報がアーム動作制御部303に入力される。また、アーム21の先端近くに固定された角速度センサー32により、アーム21の角速度が測定されて角速度情報がアーム動作制御部303に入力される。
【0040】
次に、ロボット10は、ゲイン調整部302により、ステップS20において取得した角速度情報のゲインを調整して角速度情報を補正するゲイン調整を行う(ステップS30)。ゲイン調整とは、角速度情報のゲインを増加させたり減少させたりする調整であり、ゲインが0の場合は、角速度情報を用いないことになる。なお、ゲイン調整の詳細については後述する。
【0041】
次に、ロボット10は、アーム動作制御部303により、ステップS20において取得した制御指令値及び角度情報と、ステップS30においてゲイン調整した角速度情報とに基づいて、アーム駆動モーター22のトルク指令値を演算する(ステップS40)。
【0042】
次に、ロボット10は、ステップS40において演算されたトルク指令値を、モータードライバー304に入力する(ステップS50)。
【0043】
次に、ロボット10は、モータードライバー304により、トルク指令値に対応する電力をアーム駆動モーター22に供給する。そして、アーム駆動モーター22は、供給された電力に対応するトルクを発生する(ステップS60)。
【0044】
次に、ロボット10は、アーム駆動モーター22において発生したトルクにより、アーム駆動モーター22に接続されたアーム駆動機構23を作動する(ステップS70)。そして、アーム駆動機構23を介して接続されたアーム21の角速度が加速又は減速される。
【0045】
次に、ロボット10は、ステップS10に戻り、モーター停止命令が有るまで、アーム21を回動させて保持ハンド12を所定の位置に位置させる工程を繰り返す。
【0046】
<ゲイン調整>
次に、角速度情報を補正するゲイン調整の詳細について説明する。
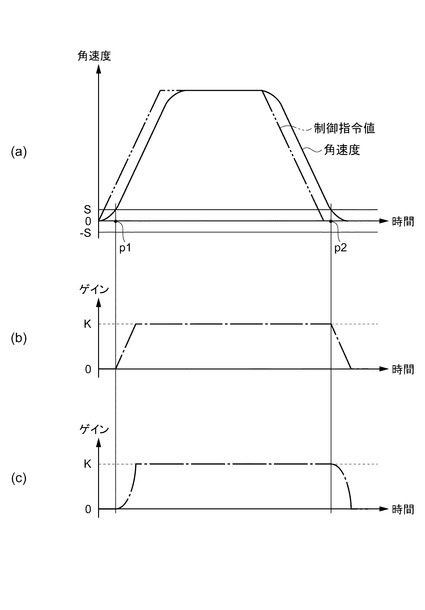
図4は、アーム21を回動させる間における角速度のゲイン調整の例を説明するための図であり、図4(a)は時間経過と角速度との関係を示す図であり、図4(b),(c)は時間経過とゲインとの関係を示す図である。図4(a)において二点鎖線で示すグラフは、制御指令値として指定されたアーム21の経過時間毎の角速度を示す。実線で示すグラフは、角速度センサー32によって計測されたアーム21の経過時間毎の角速度を示す。また、図4(b),(c)のグラフは、角速度センサー32によって計測されたアーム21の角速度を経過時間毎に補正するゲインを示す。
【0047】
図4(a)に示すように、停止状態のアーム21が回動を始め、角速度が増加して閾値Sに達した時点p1から、図4(b),(c)に示すように、これまで0であったゲインが目標値Kに達するまで漸次増加している。このとき、図4(b)では、ゲインが1次直線の傾きで増加しており、図4(c)では、ゲインが時間の経過に伴い変化幅が大きくなる2次曲線の傾きで増加している。
【0048】
一方、図4(a)に示すように、回動状態のアーム21が目的位置に近づいて、角速度が減少して閾値Sに達した時点p2から、図4(b),(c)に示すように、これまで目標値Kを保持していたゲインが0になるまで漸次減少している。このとき、図4(b)では、ゲインが1次直線の傾きで減少しており、図4(c)では、ゲインが時間の経過に伴い変化幅が大きくなる2次曲線の傾きで減少している。
【0049】
本実施形態では、ゲインが2次曲線の傾きで増加又は減少する例について説明しているが、2次曲線に限られず、例えば、3次以上の高次の関数や正弦波等を利用するようにしても良い。なお、2次曲線の場合は、比較的演算量が少なく時間の経過に伴い変化幅が大きくなる利点がある。
【0050】
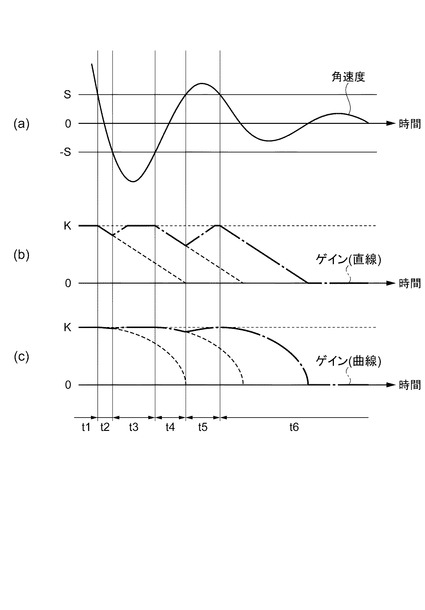
図5は、アーム21が停止する間際におけるゲイン調整の例を説明するための図であり、図5(a)は時間経過と角速度との関係を示す図であり、図5(b),(c)は時間経過とゲインとの関係を示す図である。図5(a)において実線で示すグラフは、角速度センサー32によって計測されたアーム21の経過時間毎の角速度を示す。図5(a)では、目的の位置を通り過ぎた保持ハンド12を戻すようにアーム21を回動させることによるアーム21の機械振動の様子を示している。このように、アーム21が目的の位置に略到達してから停止するまでに、機械振動が納まるまでの時間が必要となる。
【0051】
また、図5(a)に示す角速度が減少して閾値Sに達した時点から、図5(b),(c)に示すように、これまで目標値Kを保持していたゲインが漸次減少している。更に角速度が減少して閾値−Sに達した時点から、今度は逆に元の目標値Kに達するまで漸次増加している。そして、ゲインの減少及び増加を、最終的にゲインが0の状態になるまで繰り返している。なお、図5(b)では、1次直線の傾きでのゲインの増減を示し、図5(c)では、2次直線の傾きでのゲインの増減を示している。
【0052】
詳細には、求めるゲインをG、ゲインの目標値をK、定数をa、各区間における経過時間をtiとすると、図5における区間t1の場合、図5(b),(c)共にG=Kにより算出され、ゲインGは目標値Kの状態が保持されている。
区間t2の場合、図5(b)ではG=K(1−(a×ti))、図5(c)ではG=K(1−(a×ti)2)により算出され、ゲインGは目標値Kの状態から減少する。
区間t3の場合、区間t2における最終的なGをG2とすると、図5(b)ではG=G2+K(a×ti)、図5(c)ではG=G2+K(a×ti)2により算出(なお、GはKを上限とする)され、ゲインGは目標値Kの状態になるまで増加する。
区間t4の場合、図5(b)ではG=K(1−(a×ti))、図5(c)ではG=K(1−(a×ti)2)により算出され、ゲインGは目標値Kの状態から再度減少する。
区間t5の場合、区間t4における最終的なGをG4とすると、図5(b)ではG=G4+K(a×ti)、図5(c)ではG=G4+K(a×ti)2により算出(なお、GはKを上限とする)され、ゲインGは目標値Kの状態になるまで再度増加する。
区間t6の場合、図5(b)ではG=K(1−(a×ti))、図5(c)ではG=K(1−(a×ti)2)により算出され、ゲインGは目標値Kの状態から再々度減少し、最終的にはG=0の状態を継続する。
【0053】
ここで、ゲインを得るタイミングとしては、アーム21の動作中に逐次、上記の演算を行うようにして求めても良い。また、予め経過時間毎のゲインについて上記の演算結果をテーブル等にデータとして保存しておき、アーム21の動作中に保存したデータを参照するようにしても良い。
【0054】
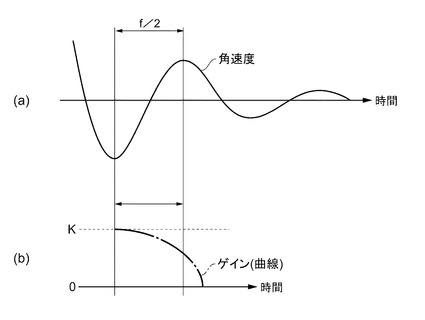
図6は、アーム21が停止する間際において、ゲインを目標値Kの状態から0の状態に減少させるまでの時間経過を説明するための図であり、図6(a)は時間経過と角速度の関係を示す図であり、図6(b)は時間経過とゲインの関係を示す図である。図6(a)では、アーム21の機械振動の周期の半分の区間をf/2として示している。図6(b)では、目標値Kの状態から2次曲線の傾きで0の状態になるまで減少させるゲイン調整に要する時間が、区間f/2よりも長いことを示している。なお、図示しないが、目標値Kの状態から1次曲線の傾きで0の状態になるまで減少させるゲイン調整に要する時間についても、区間f/2よりも長くなる。
【0055】
ここで、アーム21の姿勢や、保持ハンド12が保持する搬送対象物の負荷等の要因により、上記した機械振動の周期が変わることから、これらの要因に応じてゲイン調整の演算に用いる定数を変えるようにしても良い。また、演算量を減らすために、定数を固定としても良い。その場合、最も振動周期が長い条件(モーター軸換算のイナーシャが大きくなる姿勢で最大負荷の場合)で当該定数を規定することにより、いずれの条件の場合にも適用することができる。
【0056】
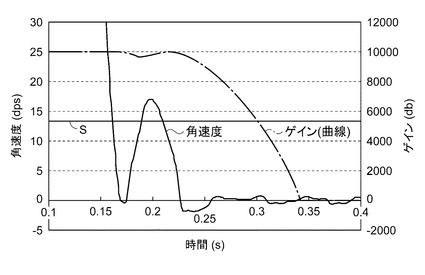
図7は、アーム21が停止する間際におけるゲイン調整の実測値の例を示す図である。同図において実線で示すグラフは、角速度センサー32によって計測されたアーム21の経過時間毎の角速度の実測値を示す。一点鎖線で示すグラフは、角速度センサー32によって計測されたアーム21の角速度の実績値を経過時間毎に補正するゲインを示す。ここでは、閾値Sを角速度13dpsに設定している。図7では、アーム21の機械振動の発生時にはゲインが高く保たれており、その後、機械振動が納まるにしたがってゲインが大幅に減少し、アーム21の静止時にはゲインが0に落ち着いているのが分かる。このように、ゲインは高い状態から低い状態へと突然に減少するのではなく漸次減少している。
【0057】
<ゲイン調整のタイミング>
次に、角速度情報を補正するゲイン調整のタイミングについて説明する。
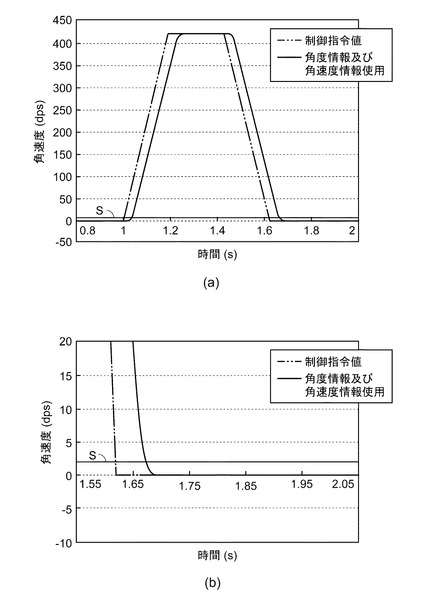
図8は、角速度の閾値を用いてゲイン調整を行う例を説明するための図であり、図8(a)は時間経過と角速度との関係を示す図であり、図8(b)はアーム21が停止する間際における図8(a)の拡大図である。両図において二点鎖線で示すグラフは、制御指令値として経過時間毎に指定されたアーム21の角速度を示す。実線で示すグラフは、制御指令値、角度情報、及び角速度情報を用いて、ねじれ角速度をフィードバックする制御等を実施した場合の経過時間毎の角速度を示す。ここでは、ねじれ角速度をフィードバックする制御等を実施する際に、図8(b)に示すように、回動状態のアーム21が目的位置に近づいて、角速度が減少して閾値Sに達した時点からゲイン調整を行い、角速度情報のゲインを漸次減少するようにしている。このため、ねじれ角速度をフィードバックする制御等を実施する際、角速度が閾値Sに達した時点から、漸次減少する角速度情報を用いることになり、最終的には角速度情報を用いないで制御指令値及び角度情報のみを用いることになる。
【0058】
上述したように、本実施形態では、停止状態のアーム21が回動を始めて角速度が閾値Sに達した時点p1から、目標値Kに達するまでゲインが漸次増加している。また、回動状態のアーム21が目的位置に近づいて角速度が閾値Sに達した時点p2から、ゲインが0になるまで漸次減少している。これにより、ゲインの急激な変化がなくなり、角速度情報を用いるか否かの切り替え時における振動の発生を抑制したり、駆動源や減速機への機械的負荷の低減によって機械寿命を延ばしたりすることができる。
【0059】
また、時間の経過に伴い変化幅が大きくなる2次曲線の傾きでゲインを減少させ、更に、ゲイン調整に要する時間をアーム21の機械振動の周期の半分よりも長くする。これにより、ゲイン調整の始めは変化が緩やかなため、大きくゲインが減らないことになる。そして、再び閾値を越える可能性のある機械振動の周期の半分が経過した時点では、ゲインが0まで落ちていないため、制振制御を有効に働かせることが可能となる。また、時間が経過するにしたがいゲインの変化が急になるため、同じ制御切り替え時間でも制振制御を有効に働かせることが可能となる。そして、できるだけ制振性を損ねずに、振動収束後に早くゲインを0にすることができる。なお、時間の経過に伴い変化幅が大きくなる2次曲線の傾きでゲインを増加させる場合にも、同様に適用することができる。
【0060】
(第2実施形態)
次に、第2実施形態に係るロボットについて、図面を参照して説明する。
第2実施形態に係るロボットは、第1実施形態に係るロボットと同様の構成をとるが、角速度情報を補正するゲイン調整のタイミングが異なる。
【0061】
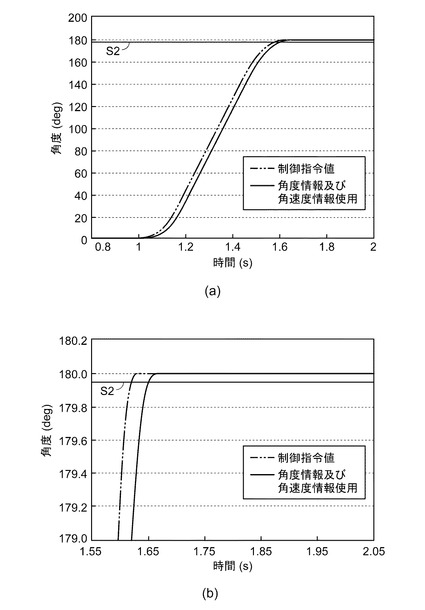
図9は、角度の閾値を用いてゲイン調整を行う例を説明するための図であり、図9(a)は時間経過と角度との関係を示す図であり、図9(b)は、アーム21が停止する間際における図9(a)の拡大図である。両図において二点鎖線で示すグラフは、制御指令値として経過時間毎に指定されたアーム21の角度を示す。実線で示すグラフは、制御指令値、角度情報、及び角速度情報を用いて、ねじれ角速度をフィードバックする制御等を実施した場合の経過時間毎の角度を示す。ここでは、ねじれ角速度をフィードバックする制御等を実施する際に、図9(b)に示すように、回動状態のアーム21が最終目標角度に近づいて閾値Sに達した時点からゲイン調整を行い、角速度情報のゲインを漸次減少するようにしている。このため、ねじれ角速度をフィードバックする制御等を実施する際、角度が閾値Sに達した時点から、漸次減少する角速度情報を用いることになり、最終的には角速度情報を用いないで制御指令値及び角度情報のみを用いることになる。
【0062】
角速度情報にノイズが載った場合には、当該ノイズによって振動が生ずるため、精度が悪化する。制御を切り替える角度の閾値S2を、目的の停止位置に対して、角速度情報のノイズによる振動の角度より離れた値にすることで、ノイズによる影響を排除することができる。また、制御指令値と角度情報を用いた制御に切り替えても、ノイズを含む角速度情報を用いる場合に比べて、大きな振動が生ずることを抑制することができる。
【0063】
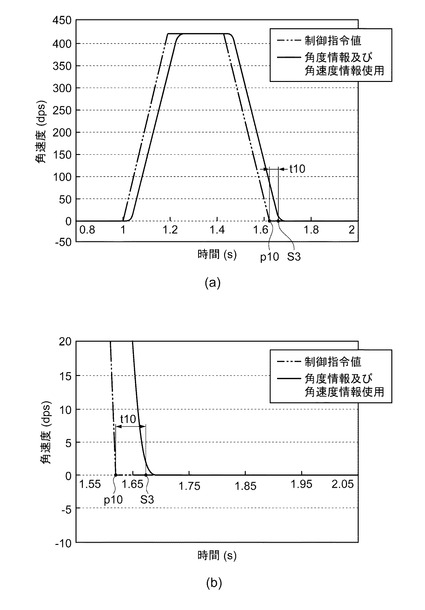
図10は、制御指令値の特徴点をもとに時間軸における閾値を用いてゲイン調整を行う例を説明するための図であり、図10(a)は時間経過と角速度との関係を示す図であり、図10(b)はアーム21が停止する間際における図10(a)の拡大図である。両図において二点鎖線で示すグラフは、制御指令値として経過時間毎に指定されたアーム21の角速度を示す。実線で示すグラフは、制御指令値、角度情報、及び角速度情報を用いて、ねじれ角速度をフィードバックする制御等を実施した場合の経過時間毎の角速度を示す。ここでは、ねじれ角速度をフィードバックする制御等を実施する際に、図10(b)に示すように、回動状態のアーム21が目的位置に近づいて、制御指令値の角速度が0になった時点p10から時間t10だけ経過した時点を閾値S3としている。そして、この閾値S3の時点からゲイン調整を行い、角速度情報のゲインを漸次減少するようにしている。このため、ねじれ角速度をフィードバックする制御等を実施する際、角速度の時間経過が閾値S3の時点に達してから、漸次減少する角速度情報を用いることになり、最終的には角速度情報を用いないで制御指令値及び角度情報のみを用いることになる。
【0064】
制御指令値の角速度が0になった時点から一定の時間t10が経過すると、一般的に、給除材アーム21の角速度は0になる。給除材アーム21の角速度が0にならず、更にアーム駆動モーター22を駆動させるようなトルク指令値が出力されるような状態は、制御系に異常が発生した可能性が高い状態である。このような場合、制御指令値と角度情報とゲイン調整を行った角速度情報とを用いた制御を実施することで、これらの異常要因を排除することができる。
【0065】
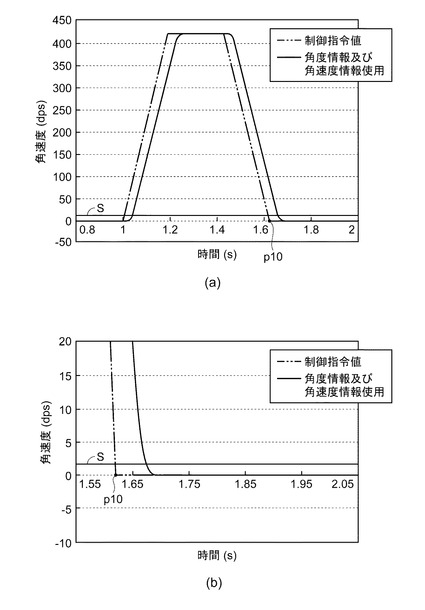
図11は、制御指令値の特徴点をもとに角速度の閾値を用いてゲイン調整を行う例を説明するための図であり、図11(a)は時間経過と角速度との関係を示す図であり、図11(b)はアーム21が停止する間際における図11(a)の拡大図である。両図において二点鎖線で示すグラフは、制御指令値として経過時間毎に指定されたアーム21の角速度を示す。実線で示すグラフは、制御指令値、角度情報、及び角速度情報を用いて、ねじれ角速度をフィードバックする制御等を実施した場合の経過時間毎の角速度を示す。ここでは、ねじれ角速度をフィードバックする制御等を実施する際に、図11(b)に示すように、回動状態のアーム21が目的位置に近づいて、制御指令値の角速度が0になった時点p10以降に、角速度が減少して閾値Sに達した時点からゲイン調整を行い、角速度情報のゲインを漸次減少するようにしている。このため、ねじれ角速度をフィードバックする制御等を実施する際、制御指令値の角速度が0であり且つ角速度が閾値Sに達した時点から、漸次減少する角速度情報を用いることになり、最終的には角速度情報を用いないで制御指令値及び角度情報のみを用いることになる。
【0066】
制御指令値の角速度が0になっていないのに、何等かの要因によって一時的に閾値を越えてしまう角速度が計測されることがある。このような場合、制御指令値の角速度が0であるか否かの判定を入れることにより、アーム21の角速度について閾値を用いた判定精度をより向上させることができる。
【0067】
なお、上述した実施形態では、アーム21が停止する間際における角速度情報のゲイン調整の例について主に述べたが、アーム21が停止する間際に限られず、停止状態のアーム21が回動を始めたときについても適用することができる。
【0068】
(第3実施形態)
次に、前述した実施形態に係るロボットを応用した各種装置について、図面を参照して説明する。なお、本実施形態に係る各種装置と、図1に示す第1実施形態に係るロボット10とでの共通の構成については、同一符号を付してあり、以下異なる構成についてのみ説明する。
【0069】
<ロボット>
最初に、前述した実施形態に係るロボットを応用した、前述した実施形態とは異なる構成を備えるロボットについて説明する。
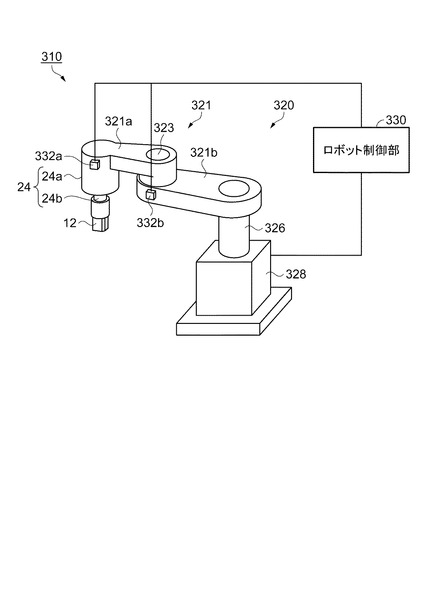
図12は、第3実施形態に係るロボット310の概略構成を示す外観斜視図である。同図に示すように、ロボット310は、ロボット機構320とロボット制御部330とにより構成されている。ロボット機構320は、保持ハンド12、ハンド保持機構24、アーム321、アーム軸部326、機台328、角速度センサー332a,332b、2個の角度センサー(図示略)等を備えている。
【0070】
機台328は、内蔵する軸受機構(図示略)を介して、アーム軸部326をアーム軸部326の回動軸回りに回動自在に支持している。アーム軸部326は、機台328に内蔵されたアーム駆動モーター(図示略)とアーム駆動機構(図示略)を介して機台328に接続されており、アーム駆動モーターによって回動させられる。アーム駆動モーターには角度センサーが接続されており、角度センサーによってアーム駆動モーターの回動角度が測定される。
【0071】
アーム軸部326の機台328に支持された側と反対側の端には、アーム321の一端が固定されている。アーム321は、アーム部321a,321b及びアーム関節部323を備えている。アーム部321aの一端とアーム部321bの一端とは、アーム関節部323で接続されている。アーム部321bのアーム関節部323に接続された一端の反対側の一端が、アーム軸部326に固定されている。アーム軸部326は、機台328に対してアーム軸部326の回動軸回りに回動自在であるため、アーム軸部326に一端を固定されたアーム部321bは、機台328に対してアーム軸部326の回動軸回りに回動自在である。
【0072】
アーム部321bは、アーム部321aを、アーム関節部323を介して、アーム関節部323の回動軸を中心に回動可能に支持している。アーム関節部323のアーム部321aが固定された部分は、アーム部321bに内蔵されたアーム部駆動モーター(図示略)と、アーム部駆動機構(図示略)を介して接続されており、アーム部駆動モーターによって回動させられる。アーム部321aとアーム部321bとは、アーム関節部323において互いのなす角度を調整可能である。即ち、アーム321は、アーム関節部323において屈伸可能である。アーム部駆動モーターにはアーム角度センサーが接続されており、アーム角度センサーにより、アーム部駆動モーターの回動角度が測定される。アーム部駆動モーターの回動角度を測定することで、アーム部321bに対するアーム部321aの回動角度を測定することができる。また、アーム軸部326の回動軸の軸方向と、アーム関節部323の回動軸の軸方向とは、互いに略平行である。
【0073】
アーム部321aのアーム関節部323に固定された反対側の端には、ハンド保持機構24が固定されている。ハンド保持機構24は、アーム部321aに固定された保持軸受24aと、保持軸受24aに摺動自在に支持された保持機構軸24bとを備えている。保持機構軸24bは、図示しない上下駆動源により、保持軸受24aに対して保持機構軸24bの軸方向に摺動可能である。また、保持機構軸24bの軸方向は、アーム軸部326の回動軸の軸方向及びアーム関節部323の回動軸の軸方向と略平行である。
【0074】
保持機構軸24bの自由端には、保持ハンド12が取り付けられている。アーム321を回動及び屈伸させることにより、保持ハンド12を搬送対象物に臨む位置に位置させる。保持軸受24aに対して保持機構軸24bを摺動させることにより、保持ハンド12を搬送対象物に離接させると共に、保持ハンド12によって保持した搬送対象物を、載置場所から持ち上げたり、載置場所に接近させたりする。
【0075】
保持ハンド12が取り付けられているハンド保持機構24には、保持ハンド12と反対側に角速度センサー332aが固定されている。角速度センサー332aは、アーム部321aの先端に固定されており、アーム部321aが回動させられる角速度を測定可能である。
アーム部321bのアーム関節部323に接続された一端の側面には、角速度センサー332bが固定されている。従って、角速度センサー332bは、アーム部321bの先端に固定されており、アーム部321bが回動させられる角速度を測定可能である。
ロボット制御部330は、情報入出力装置(図示略)を介して予め入力された制御プログラムに基づいて、ロボット310の各部の動作を統括制御する。ロボット制御部330は、角速度センサー332bによる角速度情報と機台328に内蔵された角度センサーによる角度情報とにより、アーム部321bの動作を制御可能である。同時に、角速度センサー332aによる角速度情報とアーム部321bに内蔵されたアーム角度センサーによる角度情報とにより、アーム部321aのアーム部321bに対する相対動作を制御可能である。すなわち、アーム部321aの動作とアーム部321bとを統括したアーム321の動作を、上述した実施形態と同様に、ゲイン調整を行った角速度情報と、角度情報とを用いて制御することができる。
【0076】
<搬送装置>
次に、前述した実施形態に係るロボットを応用した搬送装置について説明する。
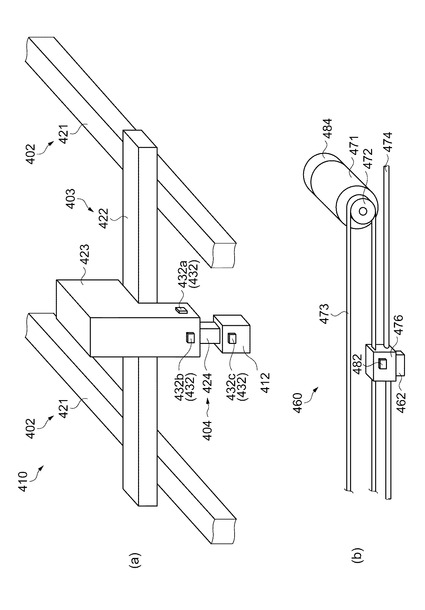
図13は、搬送装置の概略構成を示す外観斜視図である。図13(a)は、天吊搬送装置の概略構成を示す外観斜視図であり、図13(b)は、印刷装置におけるヘッド搬送装置の概略構成を示す外観斜視図である。
【0077】
<天吊搬送装置>
図13(a)に示すように、天吊搬送装置410は、主走査方向移動機構402、副走査方向移動機構403、昇降移動機構404、保持機構412、距離センサー、加速度センサー432、搬送装置制御部(図示略)等を備えている。
【0078】
主走査方向移動機構402は、主走査方向に延在する一対の主走査ガイドレール421,421と、主走査ガイドレール421に形成された主走査リニアモーターと、走査プレート422に形成された主走査スライダーとを備えている。走査プレート422は、一対の主走査ガイドレール421,421の間に架け渡されて、主走査方向と略直交する副走査方向に延在している。走査プレート422は、主走査リニアモーターと主走査スライダーとにより、主走査方向に自在に移動させられる。一対の主走査ガイドレール421,421は、例えば天井などに懸吊されて固定されている。
【0079】
副走査方向移動機構403は、走査プレート422に形成された副走査リニアモーターと、副走査枠423に形成された副走査スライダーとを備えている。副走査枠423は、副走査リニアモーターと副走査スライダーとにより、副走査方向に自在に移動させられる。
昇降移動機構404は、副走査枠423に配設されたボール軸受と、ボール軸受駆動モーターと、昇降軸424に固定されたボールねじとを備えている。昇降軸424は、ボール軸受とボール軸受駆動モーターとボールねじとにより、昇降させられる。
昇降軸424のボールねじと反対側に固定された保持機構412を、主走査方向移動機構402と、副走査方向移動機構403と、によって主走査方向及び副走査方向の任意の位置に移動し、昇降移動機構404により、搬送対象物に対して離接させることができる。
搬送装置制御部は、情報入出力装置(図示略)を介して予め入力された制御プログラムに基づいて、天吊搬送装置410の各部の動作を統括制御する。
【0080】
主走査リニアモーター、副走査リニアモーター、及びボール軸受駆動モーターには、それぞれによる駆動距離を測定する距離センサーが接続されている。
副走査枠423又は保持機構412には、加速度センサー432a、加速度センサー432b、又は加速度センサー432cが固定されている。加速度センサー432a、加速度センサー432b、及び加速度センサー432cは、主走査方向、副走査方向、又は昇降方向の加速度を測定可能である。
主走査リニアモーター、副走査リニアモーター、又はボール軸受駆動モーターに接続された距離センサーによる、それぞれの方向における移動距離情報と、加速度センサー432a、加速度センサー432b、又は加速度センサー432cによる、それぞれの方向における加速度情報と、により、保持機構412の移動を制御することができる。距離センサーとしては、例えばリニアエンコーダーを用いることができる。
【0081】
移動距離情報及び加速度情報を用いて保持機構412の移動の制御を実行する際は、移動距離情報又は加速度情報などに閾値を予め設定し、移動距離情報又は加速度情報などを当該閾値と比較して、加速度情報のゲイン調整を行う。搬送装置制御部の動作制御部が、制御指令値と、移動距離情報と、ゲイン調整を行った加速度情報とを用いた制御を実施する。当該制御を実施することにより、主走査方向移動機構402、副走査方向移動機構403、及び昇降移動機構404の動作を制御して、保持機構412を任意の位置に移動し、位置決めする。
【0082】
<ヘッド搬送装置>
図13(b)に示すように、ヘッド搬送装置460は、印刷装置の吐出ヘッド462を移動させるものであり、ヘッドキャリッジ476、キャリッジ軸474、駆動ベルト473、駆動プーリー472、駆動モーター471、加速度センサー482、エンコーダー484等を備えている。印刷装置は、印刷装置の各部の動作を統括制御する印刷装置制御部(図示略)を備えている。
【0083】
駆動モーター471は図示しない装置枠に固定されており、駆動軸の一端に駆動プーリー472が固定されている。駆動プーリー472と図示しない従動プーリーとに、駆動ベルト473が張渡されており、駆動ベルト473は、駆動モーター471によって駆動される。キャリッジ軸474は、駆動ベルト473の延在方向と平行に配設されている。キャリッジ軸474には、ヘッドキャリッジ476がキャリッジ軸474の軸方向に摺動自在に嵌合して支持されている。ヘッドキャリッジ476は、駆動ベルト473と固定されており、駆動ベルト473が駆動されることにより、キャリッジ軸474に沿って移動させられる。ヘッドキャリッジ476に保持された吐出ヘッド462は、キャリッジ軸474の軸方向に移動させられ、任意の位置に保持される。
印刷装置制御部は、情報入出力装置(図示略)を介して予め入力された制御プログラムに基づいて、印刷装置の各部の動作を統括制御する。
【0084】
エンコーダー484は、駆動モーター471の駆動軸に接続されており、駆動モーター471の回動角度を測定することにより、吐出ヘッド462の移動距離を測定することができる。当該移動距離に対応する吐出ヘッド462の位置に対応する駆動モーター471の角度情報を、駆動モーター471の位置情報と表記する。加速度センサー482はヘッドキャリッジ476に固定されており、ヘッドキャリッジ476が駆動されることによってヘッドキャリッジ476に作用する加速度を測定可能である。エンコーダー484による位置情報と、加速度センサー482による加速度情報と、により、ヘッドキャリッジ476に保持された吐出ヘッド462の移動を制御することができる。
【0085】
位置情報及び加速度情報を用いて吐出ヘッド462の移動の制御を実行する際は、位置情報又は加速度情報などに閾値を設定し、位置情報又は加速度情報などを当該閾値と比較して、加速度情報のゲイン調整を行う。印刷装置制御部の動作制御部が、制御指令値と、位置情報と、ゲイン調整を行った加速度情報とを用いた制御を実施する。当該制御を実施することにより、駆動モーター471の動作を制御して、ヘッドキャリッジ476に保持された吐出ヘッド462を任意の位置に移動し、位置決めする。
【0086】
<レーザープリンター>
次に、前述した実施形態に係るロボットを応用してドラム状の部材の回動を制御する例として、レーザープリンター510について説明する。
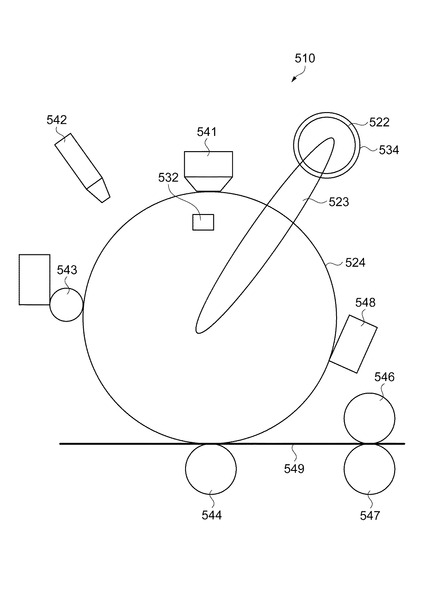
図14は、レーザープリンターの要部の概略構成を示す説明図である。同図に示すように、レーザープリンター510は、感光体ドラム524、ドラム駆動モーター522、エンコーダー534、駆動伝達機構523、チャージ装置541、レーザー発振装置542、トナー供給装置543、転写ローラー544、定着ローラー546及び定着ローラー547、トナー回収装置548、角速度センサー532、プリンター制御部(図示略)等を備えている。
【0087】
感光体ドラム524は、駆動伝達機構523を介してドラム駆動モーター522に接続されており、ドラム駆動モーター522によって回動軸回りに回動させられる。感光体ドラム524の表面は、チャージ装置541によってマイナスに帯電させられ、レーザー発振装置542により、帯電部分が印刷物の形状に残されることで印刷物の形状が描かれ、トナー供給装置543によって供給されたトナーが、帯電した印刷物の形状に付着する。用紙549が転写ローラー544によって感光体ドラム524に圧着されて、トナーが用紙549に転写される。用紙549に転写されたトナーは、定着ローラー546及び定着ローラー547によって圧力と熱を加えて定着させる。トナーを転写した感光体ドラム524の表面は、トナー回収装置548によって不要なトナーが回収されて、再び上記工程が繰り返される。
プリンター制御部は、情報入出力装置(図示略)を介して予め入力された制御プログラムに基づいて、レーザープリンター510の各部の動作を統括制御する。
【0088】
ドラム駆動モーター522の駆動軸には、エンコーダー534が接続されており、エンコーダー534によってドラム駆動モーター522の回動角度を測定することにより、感光体ドラム524の角度情報を取得することができる。角速度センサー532は感光体ドラム524に固定されており、角速度センサー532によって感光体ドラム524が回動する角速度の情報を取得することができる。エンコーダー534によるドラム駆動モーター522の角度情報と、角速度センサー532による角速度情報と、により、感光体ドラム524の回動を制御することができる。
【0089】
角度情報及び角速度情報を用いて感光体ドラム524の回動の制御を実行する際は、角度情報又は角速度情報などに閾値を設定し、角度情報又は角速度情報などを当該閾値と比較して、角速度情報のゲイン調整を行う。プリンター装置制御部の動作制御部が、制御指令値と、角度情報と、ゲイン調整を行った角速度情報とを用いた制御を実施する。当該制御を実施することにより、ドラム駆動モーター522の動作を制御して、感光体ドラム524を任意の角度、回動させる。
【0090】
以上、添付図面を参照しながら好適な実施形態について説明したが、好適な実施形態は、前記実施形態に限られない。実施形態は、要旨を逸脱しない範囲内において種々変更を加え得ることは勿論であり、以下のように実施することもできる。
【0091】
(変形例1)
上述した実施形態においては、角速度情報、角度情報、移動距離情報、加速度情報、位置情報等について閾値を規定する例や、制御指令値の特徴点に対して時間軸において閾値を規定する例について説明したが、閾値を規定する対象はこれらに限られない。角速度情報や加速度度情報の値に影響を及ぼすノイズに閾値を設定して、当該ノイズのレベルによって角速度情報や加速度情報のゲイン調整を行うようにしても良い。角速度情報や加速度情報の値に影響を及ぼすノイズとしては、装置自身の機械振動や、周囲に存在する装置などの振動や、装置に供給される電力の振れや、周囲の電磁ノイズなどが挙げられる。
【0092】
(変形例2)
上述した実施形態においては、角速度センサー32による角速度情報や、加速度センサー432による加速度情報について閾値を規定する例について説明したが、閾値を規定する対象はこれらに限られない。閾値は、角速度情報や加速度情報の一回以上の積分値について規定しても良い。加速度情報の積分値は速度情報であって、速度情報は、角速度情報と同様に取り扱うことができる。加速度情報の二回積分値及び角速度情報の積分値は移動距離の情報であって、移動距離の情報は、角度情報や位置情報と同様に取り扱うことができる。
【0093】
(変形例3)
上述した実施形態においては、角度センサー34による角度情報や、距離センサーによる移動距離情報について閾値を規定する例について説明したが、閾値を規定する対象はこれらに限られない。閾値は、角度情報や移動距離情報の一回以上の微分値について規定しても良い。角度情報又は移動距離情報の微分値は、角速度又は移動速度であって、上述した角速度情報と同様に取り扱うことができる。角度情報又は移動距離情報の二回微分値は、角加速度又は加速度であって、上述した加速度情報と同様に取り扱うことができる。
【0094】
(変形例4)
上述した実施形態においては、角度情報や角速度情報や移動距離情報や加速度情報や位置情報などについて閾値を規定する例や、制御指令値の特徴点に対して時間軸において閾値を規定する例について説明した。これらの閾値を規定した対象は、制御を実行する際は、それぞれ単独で用いられていたが、閾値を規定した複数の対象を用いて制御を実行しても良い。例えば、角度情報及び角速度情報が共に閾値を超えた場合のみ、角速度情報のゲイン調整を行う制御を実行し、角度情報又は角速度情報の少なくとも一方が閾値を超えていない場合には、ゲイン調整を行わない制御を実行しても良い。また、角度情報や角速度情報や移動距離情報や加速度情報や位置情報などや、制御指令値の特徴点に対する時間軸などと、変形例1で説明した角速度情報や加速度情報の値に影響を及ぼすノイズレベルとを組み合わせても良い。この場合、例えば、角度情報や角速度情報や移動距離情報や加速度情報や位置情報などや、制御指令値の特徴点に対する時間軸などと、ノイズレベルとの両方が共に閾値を超えた場合のみ、ゲイン調整を行う制御を実行し、少なくとも一方が閾値を超えていない場合には、ゲイン調整を行わない制御を実行する。これにより、角速度情報などのノイズレベルが低レベルに保たれているにも関わらず、ノイズによる悪影響を回避するためにゲイン調整を行う制御を実施するというような状態を回避することができる。
【0095】
(変形例5)
上述した実施形態においては、ロボット及び搬送装置の例として、ロボット機構20を備えるロボット10、ロボット機構320を備えるロボット310、天吊搬送装置410、印刷装置が備えるヘッド搬送装置460、レーザープリンター510が備えるドラム駆動装置、などを例に説明した。しかし、上述した慣性センサーを用いた制御方法を用いて好適に制御できるロボット及び搬送装置は、これらの例示した装置に限られない。上述した慣性センサーを用いた制御方法を用いることで、移動体を所定の目的位置まで速やかに移動させると共に、当該位置に精度良く速やかに停止させることが好ましい装置を好適に制御することができる。
【符号の説明】
【0096】
10…ロボット、12…保持ハンド、20…ロボット機構、21…アーム、22…アーム駆動モーター、23…アーム駆動機構、24…ハンド保持機構、24a…保持軸受、24b…保持機構軸、26…アーム軸部、28…機台、30…ロボット制御部、32…角速度センサー、34…角度センサー、301…制御指令発生部、302…ゲイン調整部、303…アーム動作制御部、304…モータードライバー、305…角速度算出部、310…ロボット、320…ロボット機構、321…アーム、321a,321b…アーム部、323…アーム関節部、326…アーム軸部、328…機台、330…ロボット制御部、332a…角速度センサー、332b…角速度センサー、402…主走査方向移動機構、403…副走査方向移動機構、404…昇降移動機構、410…天吊搬送装置、412…保持機構、421…主走査ガイドレール、422…走査プレート、423…副走査枠、424…昇降軸、432…加速度センサー、432a…加速度センサー、432b…加速度センサー、432c…加速度センサー、460…ヘッド搬送装置、462…吐出ヘッド、471…駆動モーター、472…駆動プーリー、473…駆動ベルト、474…キャリッジ軸、476…ヘッドキャリッジ、482…加速度センサー、484…エンコーダー、510…レーザープリンター、522…ドラム駆動モーター、523…駆動伝達機構、524…感光体ドラム、532…角速度センサー、534…エンコーダー、541…チャージ装置、542…レーザー発振装置、543…トナー供給装置、544…転写ローラー、546…定着ローラー、547…定着ローラー、548…トナー回収装置、549…用紙。
【技術分野】
【0001】
本発明は、ロボット及びロボットの制御方法に関する。
【背景技術】
【0002】
従来から、アームを回動等させることによりアームの先端に取り付けられた端末装置を所望の位置に移動させ、当該位置において端末装置を稼動させるロボットなどが知られている。例えば、把持端末を備えて加工装置に対して被加工部材を給除材する給除材装置や、塗装端末を備えた塗装ロボットや、溶接端末を備えた溶接ロボットなどが知られている。
【0003】
ロボットを駆動させる際には、ロボットのアームを駆動するモーターなどの駆動源の回動角度を測定し、測定した角度情報に基づいてアームの先端側の位置などを制御する制御方法が用いられている。しかし、駆動源からアームに駆動力を伝達する伝達機構や、アームは剛体ではないことに起因して、伝達機構やアームが変形することがある。この伝達機構やアームの変形により、アームに振動が生ずるという問題があった。この問題に対し、アーム先端に慣性センサーを取り付けて先端の動きを測定し、得られた慣性センサーによる角速度情報を制御に用いる方法が考案されている。特許文献1には、慣性センサーの出力信号によってアームの動作を制御することにより、振れによる精度低下を防止することができる多関節ロボットの制御方法及び多関節ロボットが開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平7−9374号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1の場合、慣性センサーの出力には基準電位のドリフトやノイズなどの誤差が含まれており、このような情報を利用して制御を行うと正しく制御を行えない可能性や安定性を損なうという課題があった。
【課題を解決するための手段】
【0006】
本発明は、上述の課題の少なくとも一部を解決するためになされたものであり、以下の形態又は適用例として実現することが可能である。
【0007】
[適用例1]一端を回動可能に支持されたアームと、前記アームを回動させる駆動源と、前記駆動源の回動角度を検出して角度情報を出力する角度センサーと、前記アームに取り付けられており、前記アームに作用する慣性力を検出して慣性力情報を出力する慣性センサーと、前記アームの回動動作を規定する制御指令値を出力する制御指令発生部と、前記慣性力情報の重み付け値を漸次変化させて調整する重み付け調整部と、前記制御指令値、前記角度情報、及び前記重み付け値によって重み付けされた前記慣性力情報に基づいて前記アームの動作を制御するアーム動作制御部と、を備えることを特徴とするロボット。
【0008】
上記したロボットによれば、重み付け調整部が、慣性力情報の重み付け値を漸次変化させる。そして、アーム動作制御部が、制御指令値、角度情報、及び漸次変化させた重み付け値によって重み付けされた慣性力情報に基づいてアームの動作を制御する。これにより、慣性力情報の急激な変化に伴うアームの振動や、駆動源や減速機に対しての機械的負荷による機械寿命への悪影響を抑制することができる。
【0009】
[適用例2]前記重み付け調整部は、前記アームが停止状態から回動状態に移行する場合に前記慣性力情報の重み付け値を漸次増加させる調整と、前記アームが回動状態から停止状態に移行する場合に前記慣性力情報の重み付け値を漸次減少させる調整との、少なくとも1つの調整を行うことを特徴とする上記ロボット。
【0010】
上記したロボットによれば、アームが停止状態から回動状態に移行する場合に、慣性力情報の重み付け値を漸次増加させる調整を行うことができる。これにより、慣性力情報を用いない状態から慣性力情報を用いて位置決めする状態に移行する際に、慣性力情報の急激な変化を抑制することができる。また、アームが回動状態から停止状態に移行する場合に、慣性力情報の重み付け値を漸次減少させる調整を行うことができる。これにより、慣性力情報を用いた状態から慣性力情報を用いないで位置決めする状態に移行する際に、慣性力情報の急激な変化を抑制することができる。
【0011】
[適用例3]前記重み付け調整部は、時間の経過に伴い前記重み付けの変化幅を大きくさせることを特徴とする上記ロボット。
【0012】
上記したロボットによれば、時間の経過に伴い重み付けの変化幅を大きくさせることにより、始めは慣性力情報の変化幅を小さくし、後になるほど慣性力情報の変化幅を大きくすることができる。これにより、アームの振動の変化幅が少ない状態から多い状態に移行する際は、始めは慣性力情報の利用を少なくして、後になるほど急に、慣性力情報の利用を多くすることができる。一方、アームの振動の変化幅が多い状態から少ない状態に移行する際は、始めは慣性力情報の利用を多くして、後になるほど急に、慣性力情報の利用を少なくすることができる。つまり、時間の経過に伴って、アームの振動の変化幅に応じて適切に重み付けした慣性力情報を用いることができる。
【0013】
[適用例4]前記重み付け調整部は、前記アームの回動による前記アームの振動周期の半分以上の時間、前記重み付け値を変化させることを特徴とする上記ロボット。
【0014】
上記したロボットによれば、回動によるアームの振動周期の半分以上の時間、重み付け値を変化させる。これにより、アームの振動の変化幅が大きい場合でも、当該変化幅への対応に要する時間以上に重み付け値を変化させることができ、慣性力情報の急激な変化を抑制することができる。
【0015】
[適用例5]前記重み付け調整部は、前記慣性力情報と当該慣性力情報について予め設定された閾値とを比較して前記重み付け値を変化させることを特徴とする上記ロボット。
【0016】
上記したロボットによれば、慣性力情報と、予め設定された閾値とを比較して重み付け値を変化させる。これにより、ノイズなどによる慣性力情報の誤差の影響を基に慣性力情報の閾値を設定し、慣性力情報と当該閾値とを比較して重み付け値を変化させることができ、誤差を抑制した慣性力情報を利用することができる。
【0017】
[適用例6]前記重み付け調整部は、前記角度情報と当該角度情報について予め設定された閾値とを比較して前記重み付け値を変化させるこことを特徴とする上記ロボット。
【0018】
上記したロボットによれば、角度情報と、予め設定された閾値とを比較して重み付け値を変化させる。これにより、ノイズなどによる角度情報の誤差の影響を基に角度情報の閾値を設定し、角度情報と当該閾値とを比較して重み付け値を変化させることができ、誤差を抑制した角度情報を利用することができる。
【0019】
[適用例7]前記重み付け調整部は、前記制御指令値が規定する前記アームの回動動作の停止時点からの経過時間と、前記経過時間について予め設定された閾値とを比較して前記重み付け値を変化させるこことを特徴とする上記ロボット。
【0020】
上記したロボットによれば、制御指令値が規定するアームの回動動作の停止時点からの経過時間と、予め設定された閾値とを比較して重み付け値を変化させる。これにより、ノイズなどによる慣性力情報の誤差の影響を基に経過時間の閾値を設定し、実際の経過時間と当該閾値とを比較して重み付け値を変化させることができ、誤差を抑制した慣性力情報を用いることができる。
【0021】
[適用例8]一端を回動可能に支持されたアームと、前記アームを回動させる駆動源と、前記駆動源の回動角度を検出して角度情報を出力する角度センサーと、前記アームに取り付けられており、前記アームに作用する慣性力を検出して慣性力情報を出力する慣性センサーと、前記アームの回動動作を規定する制御指令値を出力する制御指令発生工程と、前記慣性力情報の重み付け値を漸次変化させて調整する重み付け調整工程と、前記制御指令値、前記角度情報、及び前記重み付け値によって重み付けされた前記慣性力情報に基づいて前記アームの動作を制御するアーム動作制御工程と、を備えることを特徴とするロボットの制御方法。
【0022】
上記したロボットの制御方法によれば、重み付け調整工程において、慣性力情報の重み付け値を漸次変化させる。そして、アーム動作制御工程において、制御指令値、角度情報、及び漸次変化させた重み付け値によって重み付けされた慣性力情報に基づいてアームの動作を制御する。これにより、慣性力情報の急激な変化に伴うアームの振動や、駆動源や減速機に対しての機械的負荷による機械寿命への悪影響を抑制することができる。
【図面の簡単な説明】
【0023】
【図1】第1実施形態に係るロボットの概略構成を示す外観斜視図。
【図2】ロボット機構を駆動させる機能的構成を示すブロック図。
【図3】アーム駆動モーターの駆動を制御することにより、アームを回動させる工程を示すフローチャート。
【図4】アームを回動させる間における角速度のゲイン調整の例を説明するための図であり、(a)は時間経過と角速度との関係を示す図、(b),(c)は時間経過とゲインとの関係を示す図。
【図5】アームが停止する間際におけるゲイン調整の例を説明するための図であり、(a)は時間経過と角速度との関係を示す図、(b),(c)は時間経過とゲインとの関係を示す図。
【図6】アームが停止する間際において、ゲインを目標値の状態から0の状態に減少させるまでの時間経過を説明するための図であり、(a)は時間経過と角速度の関係を示す図、(b)は時間経過とゲインの関係を示す図。
【図7】アームが停止する間際におけるゲイン調整の実測値の例を示す図。
【図8】角速度の閾値を用いてゲイン調整を行う例を説明するための図であり、(a)は時間経過と角速度との関係を示す図、(b)はアームが停止する間際における図(a)の拡大図。
【図9】角度の閾値を用いてゲイン調整を行う例を説明するための図であり、(a)は時間経過と角度との関係を示す図、(b)は、アームが停止する間際における(a)の拡大図である。
【図10】制御指令値の特徴点をもとに時間軸における閾値を用いてゲイン調整を行う例を説明するための図であり、(a)は時間経過と角速度との関係を示す図、(b)はアーム21が停止する間際における(a)の拡大図。
【図11】制御指令値の特徴点をもとに角速度の閾値を用いてゲイン調整を行う例を説明するための図であり、(a)は時間経過と角速度との関係を示す図、(b)はアームが停止する間際における(a)の拡大図。
【図12】第3実施形態に係るロボットの概略構成を示す外観斜視図。
【図13】搬送装置の概略構成を示す外観斜視図。
【図14】レーザープリンターの要部の概略構成を示す説明図。
【発明を実施するための形態】
【0024】
(第1実施形態)
以下、第1実施形態に係るロボットについて、図面を参照して説明する。なお、以下の図面においては、図面を見易くするため、各構成要素の寸法や比率などは適宜異ならせてある。
【0025】
<ロボットの概略構成>
ロボット10の概略構成について説明する。
図1は、第1実施形態に係るロボット10の概略構成を示す外観斜視図である。同図に示すように、ロボット10は、ロボット機構20とロボット制御部30とにより構成されている。ロボット機構20は、保持ハンド12、ハンド保持機構24、アーム21、アーム軸部26、機台28、角速度センサー32、角度センサー34(図2参照)等を備えている。ロボット10は、水平に回動可能な1本のアーム21を備えた、いわゆるスカラーロボットである。
【0026】
機台28は、内蔵する軸受機構(図示略)を介して、アーム軸部26をアーム軸部26の回動軸回りに回動自在に支持している。アーム軸部26は、機台28に内蔵されたアーム駆動モーター22(図2参照)とアーム駆動機構23(図2参照)とを介して機台28に接続されており、アーム駆動モーター22によって回動させられる。アーム駆動モーター22には角度センサー34が接続されており、角度センサー34によってアーム駆動モーター22の回動角度が測定(検出)される。
【0027】
アーム軸部26において機台28に支持された側と反対側の端には、アーム21の一端が固定されている。アーム21は、アーム駆動モーター22により、アーム軸部26の回動軸を中心に回動させられる。アーム21の回動角度は、角度センサー34によってアーム駆動モーター22の回動角度を測定することによって近似的に測定される。
【0028】
アーム21においてアーム軸部26に固定された反対側の端には、ハンド保持機構24が固定されている。ハンド保持機構24は、アーム21に固定された保持軸受24aと、保持軸受24aに摺動自在に支持された保持機構軸24bとを備えている。保持機構軸24bは、図示しない上下駆動源により、保持軸受24aに対して保持機構軸24bの軸方向に摺動可能である。また、保持機構軸24bの軸方向は、アーム軸部26の軸方向と略平行である。
【0029】
保持機構軸24bの自由端には、保持ハンド12が取り付けられている。そして、アーム21を回動させることにより、保持ハンド12を搬送対象物に臨む位置に位置させる。保持軸受24aに対して保持機構軸24bを摺動させることにより、保持ハンド12を搬送対象物に離接させると共に、保持ハンド12によって保持した搬送対象物を、載置場所から持ち上げたり、載置場所に接近させたりする。
【0030】
保持ハンド12が取り付けられているハンド保持機構24には、保持ハンド12と反対側に角速度センサー32が固定されている。角速度センサー32は、アーム21の先端に固定されており、アーム21が回動させられる角速度を測定(検出)可能である。
ロボット制御部30は、情報入出力装置(図示略)を介して予め入力された制御プログラムに基づいて、ロボット10の各部の動作を統括制御する。
【0031】
<ロボット機構駆動の機能的構成>
次に、ロボット機構20を駆動させる機能的構成について説明する。
図2は、ロボット機構20を駆動させる機能的構成を示すブロック図である。同図に示すように、ロボット10は、アーム21を回動させるために、駆動源としてのアーム駆動モーター22、アーム駆動機構23、角速度センサー32、角度センサー34、及びロボット制御部30を備えている。ここで、角速度センサー32としては、例えばジャイロセンサーを用いることができる。また、角度センサー34としては、例えばエンコーダーを用いることができる。
【0032】
ロボット制御部30は、制御指令発生部301、ゲイン調整部302、アーム動作制御部303、モータードライバー304、ねじれ角速度算出部305等を備えている。
制御指令発生部301は、給材又は除材の稼動指令に基づくロボット機構20への動作指令を実行するため、アーム21の回動動作を規定する制御指令値を出力する。ここで、給材又は除材の稼動指令は、図示しない入力装置からロボット10に入力される。そして、稼動指令に基づくロボット機構20の動作指令は、ロボット制御部30が備える統括制御部(図示略)から制御指令発生部301に出力される。そして、制御指令発生部301が出力するアーム21の制御指令値は、例えば、アーム21の先端の軌道が時間毎のアーム21の角度として示される。
【0033】
アーム動作制御部303は、制御指令発生部301が出力するアーム21の制御指令値を実行するためのアーム駆動モーター22の制御信号を出力する。このとき、アーム動作制御部303は、アーム21の制御指令値を実行するために最適なアーム駆動モーター22の制御信号を、角度センサー34からの角度情報、及び角速度センサー32からの角速度情報に基づいて、生成して出力する。なお、角速度センサー32は慣性センサーに相当し、角速度情報は慣性力情報に相当する。
【0034】
ねじれ角速度算出部305は、角度センサー34からの角度情報と、角速度センサー32からの角速度情報との差に基づいて、ねじれの成分であるねじれ角速度を算出する。ゲイン調整部302は、算出されたねじれ角速度に基づいて、角速度情報を補正する目標値となるゲインを決定する。そして、後述する所定のタイミングで、角速度情報に対しての補正量を調整するゲイン調整を行う。なお、ゲイン調整部302は、重み付け調整部に相当し、ゲインは、重み付け値に相当する。
【0035】
モータードライバー304は、アーム駆動モーター22に電力を供給することにより、アーム駆動モーター22を制御する。
【0036】
<アーム21の回動工程>
次に、アーム駆動モーター22の駆動を制御することにより、アーム21を回動させてアーム21の先端に取り付けられている保持ハンド12を所定位置に位置させる工程について説明する。
図3は、アーム駆動モーター22の駆動を制御することにより、アーム21を回動させる工程を示すフローチャートである。
【0037】
最初に、ロボット10は、モーター停止命令の有無を判定する(ステップS10)。モーター停止命令は、アーム駆動モーター22を停止させて、アーム駆動モーター22の制御を終了させる指令である。
【0038】
モーター停止命令が有った場合(ステップS10:YES)は、アーム駆動モーター22の駆動を停止し、保持ハンド12を所定位置に位置させる工程を終了する。
他方、モーター停止命令が無い場合(ステップS10:NO)は、次のステップS20に進む。
【0039】
ステップS20では、ロボット10は、アーム動作制御部303により、制御指令値、角度情報、及び角速度情報を取得する。詳細には、制御指令発生部301から出力された制御指令値がアーム動作制御部303に入力される。また、アーム駆動モーター22に接続された角度センサー34により、アーム駆動モーター22の回動角度が測定されて角度情報がアーム動作制御部303に入力される。また、アーム21の先端近くに固定された角速度センサー32により、アーム21の角速度が測定されて角速度情報がアーム動作制御部303に入力される。
【0040】
次に、ロボット10は、ゲイン調整部302により、ステップS20において取得した角速度情報のゲインを調整して角速度情報を補正するゲイン調整を行う(ステップS30)。ゲイン調整とは、角速度情報のゲインを増加させたり減少させたりする調整であり、ゲインが0の場合は、角速度情報を用いないことになる。なお、ゲイン調整の詳細については後述する。
【0041】
次に、ロボット10は、アーム動作制御部303により、ステップS20において取得した制御指令値及び角度情報と、ステップS30においてゲイン調整した角速度情報とに基づいて、アーム駆動モーター22のトルク指令値を演算する(ステップS40)。
【0042】
次に、ロボット10は、ステップS40において演算されたトルク指令値を、モータードライバー304に入力する(ステップS50)。
【0043】
次に、ロボット10は、モータードライバー304により、トルク指令値に対応する電力をアーム駆動モーター22に供給する。そして、アーム駆動モーター22は、供給された電力に対応するトルクを発生する(ステップS60)。
【0044】
次に、ロボット10は、アーム駆動モーター22において発生したトルクにより、アーム駆動モーター22に接続されたアーム駆動機構23を作動する(ステップS70)。そして、アーム駆動機構23を介して接続されたアーム21の角速度が加速又は減速される。
【0045】
次に、ロボット10は、ステップS10に戻り、モーター停止命令が有るまで、アーム21を回動させて保持ハンド12を所定の位置に位置させる工程を繰り返す。
【0046】
<ゲイン調整>
次に、角速度情報を補正するゲイン調整の詳細について説明する。
図4は、アーム21を回動させる間における角速度のゲイン調整の例を説明するための図であり、図4(a)は時間経過と角速度との関係を示す図であり、図4(b),(c)は時間経過とゲインとの関係を示す図である。図4(a)において二点鎖線で示すグラフは、制御指令値として指定されたアーム21の経過時間毎の角速度を示す。実線で示すグラフは、角速度センサー32によって計測されたアーム21の経過時間毎の角速度を示す。また、図4(b),(c)のグラフは、角速度センサー32によって計測されたアーム21の角速度を経過時間毎に補正するゲインを示す。
【0047】
図4(a)に示すように、停止状態のアーム21が回動を始め、角速度が増加して閾値Sに達した時点p1から、図4(b),(c)に示すように、これまで0であったゲインが目標値Kに達するまで漸次増加している。このとき、図4(b)では、ゲインが1次直線の傾きで増加しており、図4(c)では、ゲインが時間の経過に伴い変化幅が大きくなる2次曲線の傾きで増加している。
【0048】
一方、図4(a)に示すように、回動状態のアーム21が目的位置に近づいて、角速度が減少して閾値Sに達した時点p2から、図4(b),(c)に示すように、これまで目標値Kを保持していたゲインが0になるまで漸次減少している。このとき、図4(b)では、ゲインが1次直線の傾きで減少しており、図4(c)では、ゲインが時間の経過に伴い変化幅が大きくなる2次曲線の傾きで減少している。
【0049】
本実施形態では、ゲインが2次曲線の傾きで増加又は減少する例について説明しているが、2次曲線に限られず、例えば、3次以上の高次の関数や正弦波等を利用するようにしても良い。なお、2次曲線の場合は、比較的演算量が少なく時間の経過に伴い変化幅が大きくなる利点がある。
【0050】
図5は、アーム21が停止する間際におけるゲイン調整の例を説明するための図であり、図5(a)は時間経過と角速度との関係を示す図であり、図5(b),(c)は時間経過とゲインとの関係を示す図である。図5(a)において実線で示すグラフは、角速度センサー32によって計測されたアーム21の経過時間毎の角速度を示す。図5(a)では、目的の位置を通り過ぎた保持ハンド12を戻すようにアーム21を回動させることによるアーム21の機械振動の様子を示している。このように、アーム21が目的の位置に略到達してから停止するまでに、機械振動が納まるまでの時間が必要となる。
【0051】
また、図5(a)に示す角速度が減少して閾値Sに達した時点から、図5(b),(c)に示すように、これまで目標値Kを保持していたゲインが漸次減少している。更に角速度が減少して閾値−Sに達した時点から、今度は逆に元の目標値Kに達するまで漸次増加している。そして、ゲインの減少及び増加を、最終的にゲインが0の状態になるまで繰り返している。なお、図5(b)では、1次直線の傾きでのゲインの増減を示し、図5(c)では、2次直線の傾きでのゲインの増減を示している。
【0052】
詳細には、求めるゲインをG、ゲインの目標値をK、定数をa、各区間における経過時間をtiとすると、図5における区間t1の場合、図5(b),(c)共にG=Kにより算出され、ゲインGは目標値Kの状態が保持されている。
区間t2の場合、図5(b)ではG=K(1−(a×ti))、図5(c)ではG=K(1−(a×ti)2)により算出され、ゲインGは目標値Kの状態から減少する。
区間t3の場合、区間t2における最終的なGをG2とすると、図5(b)ではG=G2+K(a×ti)、図5(c)ではG=G2+K(a×ti)2により算出(なお、GはKを上限とする)され、ゲインGは目標値Kの状態になるまで増加する。
区間t4の場合、図5(b)ではG=K(1−(a×ti))、図5(c)ではG=K(1−(a×ti)2)により算出され、ゲインGは目標値Kの状態から再度減少する。
区間t5の場合、区間t4における最終的なGをG4とすると、図5(b)ではG=G4+K(a×ti)、図5(c)ではG=G4+K(a×ti)2により算出(なお、GはKを上限とする)され、ゲインGは目標値Kの状態になるまで再度増加する。
区間t6の場合、図5(b)ではG=K(1−(a×ti))、図5(c)ではG=K(1−(a×ti)2)により算出され、ゲインGは目標値Kの状態から再々度減少し、最終的にはG=0の状態を継続する。
【0053】
ここで、ゲインを得るタイミングとしては、アーム21の動作中に逐次、上記の演算を行うようにして求めても良い。また、予め経過時間毎のゲインについて上記の演算結果をテーブル等にデータとして保存しておき、アーム21の動作中に保存したデータを参照するようにしても良い。
【0054】
図6は、アーム21が停止する間際において、ゲインを目標値Kの状態から0の状態に減少させるまでの時間経過を説明するための図であり、図6(a)は時間経過と角速度の関係を示す図であり、図6(b)は時間経過とゲインの関係を示す図である。図6(a)では、アーム21の機械振動の周期の半分の区間をf/2として示している。図6(b)では、目標値Kの状態から2次曲線の傾きで0の状態になるまで減少させるゲイン調整に要する時間が、区間f/2よりも長いことを示している。なお、図示しないが、目標値Kの状態から1次曲線の傾きで0の状態になるまで減少させるゲイン調整に要する時間についても、区間f/2よりも長くなる。
【0055】
ここで、アーム21の姿勢や、保持ハンド12が保持する搬送対象物の負荷等の要因により、上記した機械振動の周期が変わることから、これらの要因に応じてゲイン調整の演算に用いる定数を変えるようにしても良い。また、演算量を減らすために、定数を固定としても良い。その場合、最も振動周期が長い条件(モーター軸換算のイナーシャが大きくなる姿勢で最大負荷の場合)で当該定数を規定することにより、いずれの条件の場合にも適用することができる。
【0056】
図7は、アーム21が停止する間際におけるゲイン調整の実測値の例を示す図である。同図において実線で示すグラフは、角速度センサー32によって計測されたアーム21の経過時間毎の角速度の実測値を示す。一点鎖線で示すグラフは、角速度センサー32によって計測されたアーム21の角速度の実績値を経過時間毎に補正するゲインを示す。ここでは、閾値Sを角速度13dpsに設定している。図7では、アーム21の機械振動の発生時にはゲインが高く保たれており、その後、機械振動が納まるにしたがってゲインが大幅に減少し、アーム21の静止時にはゲインが0に落ち着いているのが分かる。このように、ゲインは高い状態から低い状態へと突然に減少するのではなく漸次減少している。
【0057】
<ゲイン調整のタイミング>
次に、角速度情報を補正するゲイン調整のタイミングについて説明する。
図8は、角速度の閾値を用いてゲイン調整を行う例を説明するための図であり、図8(a)は時間経過と角速度との関係を示す図であり、図8(b)はアーム21が停止する間際における図8(a)の拡大図である。両図において二点鎖線で示すグラフは、制御指令値として経過時間毎に指定されたアーム21の角速度を示す。実線で示すグラフは、制御指令値、角度情報、及び角速度情報を用いて、ねじれ角速度をフィードバックする制御等を実施した場合の経過時間毎の角速度を示す。ここでは、ねじれ角速度をフィードバックする制御等を実施する際に、図8(b)に示すように、回動状態のアーム21が目的位置に近づいて、角速度が減少して閾値Sに達した時点からゲイン調整を行い、角速度情報のゲインを漸次減少するようにしている。このため、ねじれ角速度をフィードバックする制御等を実施する際、角速度が閾値Sに達した時点から、漸次減少する角速度情報を用いることになり、最終的には角速度情報を用いないで制御指令値及び角度情報のみを用いることになる。
【0058】
上述したように、本実施形態では、停止状態のアーム21が回動を始めて角速度が閾値Sに達した時点p1から、目標値Kに達するまでゲインが漸次増加している。また、回動状態のアーム21が目的位置に近づいて角速度が閾値Sに達した時点p2から、ゲインが0になるまで漸次減少している。これにより、ゲインの急激な変化がなくなり、角速度情報を用いるか否かの切り替え時における振動の発生を抑制したり、駆動源や減速機への機械的負荷の低減によって機械寿命を延ばしたりすることができる。
【0059】
また、時間の経過に伴い変化幅が大きくなる2次曲線の傾きでゲインを減少させ、更に、ゲイン調整に要する時間をアーム21の機械振動の周期の半分よりも長くする。これにより、ゲイン調整の始めは変化が緩やかなため、大きくゲインが減らないことになる。そして、再び閾値を越える可能性のある機械振動の周期の半分が経過した時点では、ゲインが0まで落ちていないため、制振制御を有効に働かせることが可能となる。また、時間が経過するにしたがいゲインの変化が急になるため、同じ制御切り替え時間でも制振制御を有効に働かせることが可能となる。そして、できるだけ制振性を損ねずに、振動収束後に早くゲインを0にすることができる。なお、時間の経過に伴い変化幅が大きくなる2次曲線の傾きでゲインを増加させる場合にも、同様に適用することができる。
【0060】
(第2実施形態)
次に、第2実施形態に係るロボットについて、図面を参照して説明する。
第2実施形態に係るロボットは、第1実施形態に係るロボットと同様の構成をとるが、角速度情報を補正するゲイン調整のタイミングが異なる。
【0061】
図9は、角度の閾値を用いてゲイン調整を行う例を説明するための図であり、図9(a)は時間経過と角度との関係を示す図であり、図9(b)は、アーム21が停止する間際における図9(a)の拡大図である。両図において二点鎖線で示すグラフは、制御指令値として経過時間毎に指定されたアーム21の角度を示す。実線で示すグラフは、制御指令値、角度情報、及び角速度情報を用いて、ねじれ角速度をフィードバックする制御等を実施した場合の経過時間毎の角度を示す。ここでは、ねじれ角速度をフィードバックする制御等を実施する際に、図9(b)に示すように、回動状態のアーム21が最終目標角度に近づいて閾値Sに達した時点からゲイン調整を行い、角速度情報のゲインを漸次減少するようにしている。このため、ねじれ角速度をフィードバックする制御等を実施する際、角度が閾値Sに達した時点から、漸次減少する角速度情報を用いることになり、最終的には角速度情報を用いないで制御指令値及び角度情報のみを用いることになる。
【0062】
角速度情報にノイズが載った場合には、当該ノイズによって振動が生ずるため、精度が悪化する。制御を切り替える角度の閾値S2を、目的の停止位置に対して、角速度情報のノイズによる振動の角度より離れた値にすることで、ノイズによる影響を排除することができる。また、制御指令値と角度情報を用いた制御に切り替えても、ノイズを含む角速度情報を用いる場合に比べて、大きな振動が生ずることを抑制することができる。
【0063】
図10は、制御指令値の特徴点をもとに時間軸における閾値を用いてゲイン調整を行う例を説明するための図であり、図10(a)は時間経過と角速度との関係を示す図であり、図10(b)はアーム21が停止する間際における図10(a)の拡大図である。両図において二点鎖線で示すグラフは、制御指令値として経過時間毎に指定されたアーム21の角速度を示す。実線で示すグラフは、制御指令値、角度情報、及び角速度情報を用いて、ねじれ角速度をフィードバックする制御等を実施した場合の経過時間毎の角速度を示す。ここでは、ねじれ角速度をフィードバックする制御等を実施する際に、図10(b)に示すように、回動状態のアーム21が目的位置に近づいて、制御指令値の角速度が0になった時点p10から時間t10だけ経過した時点を閾値S3としている。そして、この閾値S3の時点からゲイン調整を行い、角速度情報のゲインを漸次減少するようにしている。このため、ねじれ角速度をフィードバックする制御等を実施する際、角速度の時間経過が閾値S3の時点に達してから、漸次減少する角速度情報を用いることになり、最終的には角速度情報を用いないで制御指令値及び角度情報のみを用いることになる。
【0064】
制御指令値の角速度が0になった時点から一定の時間t10が経過すると、一般的に、給除材アーム21の角速度は0になる。給除材アーム21の角速度が0にならず、更にアーム駆動モーター22を駆動させるようなトルク指令値が出力されるような状態は、制御系に異常が発生した可能性が高い状態である。このような場合、制御指令値と角度情報とゲイン調整を行った角速度情報とを用いた制御を実施することで、これらの異常要因を排除することができる。
【0065】
図11は、制御指令値の特徴点をもとに角速度の閾値を用いてゲイン調整を行う例を説明するための図であり、図11(a)は時間経過と角速度との関係を示す図であり、図11(b)はアーム21が停止する間際における図11(a)の拡大図である。両図において二点鎖線で示すグラフは、制御指令値として経過時間毎に指定されたアーム21の角速度を示す。実線で示すグラフは、制御指令値、角度情報、及び角速度情報を用いて、ねじれ角速度をフィードバックする制御等を実施した場合の経過時間毎の角速度を示す。ここでは、ねじれ角速度をフィードバックする制御等を実施する際に、図11(b)に示すように、回動状態のアーム21が目的位置に近づいて、制御指令値の角速度が0になった時点p10以降に、角速度が減少して閾値Sに達した時点からゲイン調整を行い、角速度情報のゲインを漸次減少するようにしている。このため、ねじれ角速度をフィードバックする制御等を実施する際、制御指令値の角速度が0であり且つ角速度が閾値Sに達した時点から、漸次減少する角速度情報を用いることになり、最終的には角速度情報を用いないで制御指令値及び角度情報のみを用いることになる。
【0066】
制御指令値の角速度が0になっていないのに、何等かの要因によって一時的に閾値を越えてしまう角速度が計測されることがある。このような場合、制御指令値の角速度が0であるか否かの判定を入れることにより、アーム21の角速度について閾値を用いた判定精度をより向上させることができる。
【0067】
なお、上述した実施形態では、アーム21が停止する間際における角速度情報のゲイン調整の例について主に述べたが、アーム21が停止する間際に限られず、停止状態のアーム21が回動を始めたときについても適用することができる。
【0068】
(第3実施形態)
次に、前述した実施形態に係るロボットを応用した各種装置について、図面を参照して説明する。なお、本実施形態に係る各種装置と、図1に示す第1実施形態に係るロボット10とでの共通の構成については、同一符号を付してあり、以下異なる構成についてのみ説明する。
【0069】
<ロボット>
最初に、前述した実施形態に係るロボットを応用した、前述した実施形態とは異なる構成を備えるロボットについて説明する。
図12は、第3実施形態に係るロボット310の概略構成を示す外観斜視図である。同図に示すように、ロボット310は、ロボット機構320とロボット制御部330とにより構成されている。ロボット機構320は、保持ハンド12、ハンド保持機構24、アーム321、アーム軸部326、機台328、角速度センサー332a,332b、2個の角度センサー(図示略)等を備えている。
【0070】
機台328は、内蔵する軸受機構(図示略)を介して、アーム軸部326をアーム軸部326の回動軸回りに回動自在に支持している。アーム軸部326は、機台328に内蔵されたアーム駆動モーター(図示略)とアーム駆動機構(図示略)を介して機台328に接続されており、アーム駆動モーターによって回動させられる。アーム駆動モーターには角度センサーが接続されており、角度センサーによってアーム駆動モーターの回動角度が測定される。
【0071】
アーム軸部326の機台328に支持された側と反対側の端には、アーム321の一端が固定されている。アーム321は、アーム部321a,321b及びアーム関節部323を備えている。アーム部321aの一端とアーム部321bの一端とは、アーム関節部323で接続されている。アーム部321bのアーム関節部323に接続された一端の反対側の一端が、アーム軸部326に固定されている。アーム軸部326は、機台328に対してアーム軸部326の回動軸回りに回動自在であるため、アーム軸部326に一端を固定されたアーム部321bは、機台328に対してアーム軸部326の回動軸回りに回動自在である。
【0072】
アーム部321bは、アーム部321aを、アーム関節部323を介して、アーム関節部323の回動軸を中心に回動可能に支持している。アーム関節部323のアーム部321aが固定された部分は、アーム部321bに内蔵されたアーム部駆動モーター(図示略)と、アーム部駆動機構(図示略)を介して接続されており、アーム部駆動モーターによって回動させられる。アーム部321aとアーム部321bとは、アーム関節部323において互いのなす角度を調整可能である。即ち、アーム321は、アーム関節部323において屈伸可能である。アーム部駆動モーターにはアーム角度センサーが接続されており、アーム角度センサーにより、アーム部駆動モーターの回動角度が測定される。アーム部駆動モーターの回動角度を測定することで、アーム部321bに対するアーム部321aの回動角度を測定することができる。また、アーム軸部326の回動軸の軸方向と、アーム関節部323の回動軸の軸方向とは、互いに略平行である。
【0073】
アーム部321aのアーム関節部323に固定された反対側の端には、ハンド保持機構24が固定されている。ハンド保持機構24は、アーム部321aに固定された保持軸受24aと、保持軸受24aに摺動自在に支持された保持機構軸24bとを備えている。保持機構軸24bは、図示しない上下駆動源により、保持軸受24aに対して保持機構軸24bの軸方向に摺動可能である。また、保持機構軸24bの軸方向は、アーム軸部326の回動軸の軸方向及びアーム関節部323の回動軸の軸方向と略平行である。
【0074】
保持機構軸24bの自由端には、保持ハンド12が取り付けられている。アーム321を回動及び屈伸させることにより、保持ハンド12を搬送対象物に臨む位置に位置させる。保持軸受24aに対して保持機構軸24bを摺動させることにより、保持ハンド12を搬送対象物に離接させると共に、保持ハンド12によって保持した搬送対象物を、載置場所から持ち上げたり、載置場所に接近させたりする。
【0075】
保持ハンド12が取り付けられているハンド保持機構24には、保持ハンド12と反対側に角速度センサー332aが固定されている。角速度センサー332aは、アーム部321aの先端に固定されており、アーム部321aが回動させられる角速度を測定可能である。
アーム部321bのアーム関節部323に接続された一端の側面には、角速度センサー332bが固定されている。従って、角速度センサー332bは、アーム部321bの先端に固定されており、アーム部321bが回動させられる角速度を測定可能である。
ロボット制御部330は、情報入出力装置(図示略)を介して予め入力された制御プログラムに基づいて、ロボット310の各部の動作を統括制御する。ロボット制御部330は、角速度センサー332bによる角速度情報と機台328に内蔵された角度センサーによる角度情報とにより、アーム部321bの動作を制御可能である。同時に、角速度センサー332aによる角速度情報とアーム部321bに内蔵されたアーム角度センサーによる角度情報とにより、アーム部321aのアーム部321bに対する相対動作を制御可能である。すなわち、アーム部321aの動作とアーム部321bとを統括したアーム321の動作を、上述した実施形態と同様に、ゲイン調整を行った角速度情報と、角度情報とを用いて制御することができる。
【0076】
<搬送装置>
次に、前述した実施形態に係るロボットを応用した搬送装置について説明する。
図13は、搬送装置の概略構成を示す外観斜視図である。図13(a)は、天吊搬送装置の概略構成を示す外観斜視図であり、図13(b)は、印刷装置におけるヘッド搬送装置の概略構成を示す外観斜視図である。
【0077】
<天吊搬送装置>
図13(a)に示すように、天吊搬送装置410は、主走査方向移動機構402、副走査方向移動機構403、昇降移動機構404、保持機構412、距離センサー、加速度センサー432、搬送装置制御部(図示略)等を備えている。
【0078】
主走査方向移動機構402は、主走査方向に延在する一対の主走査ガイドレール421,421と、主走査ガイドレール421に形成された主走査リニアモーターと、走査プレート422に形成された主走査スライダーとを備えている。走査プレート422は、一対の主走査ガイドレール421,421の間に架け渡されて、主走査方向と略直交する副走査方向に延在している。走査プレート422は、主走査リニアモーターと主走査スライダーとにより、主走査方向に自在に移動させられる。一対の主走査ガイドレール421,421は、例えば天井などに懸吊されて固定されている。
【0079】
副走査方向移動機構403は、走査プレート422に形成された副走査リニアモーターと、副走査枠423に形成された副走査スライダーとを備えている。副走査枠423は、副走査リニアモーターと副走査スライダーとにより、副走査方向に自在に移動させられる。
昇降移動機構404は、副走査枠423に配設されたボール軸受と、ボール軸受駆動モーターと、昇降軸424に固定されたボールねじとを備えている。昇降軸424は、ボール軸受とボール軸受駆動モーターとボールねじとにより、昇降させられる。
昇降軸424のボールねじと反対側に固定された保持機構412を、主走査方向移動機構402と、副走査方向移動機構403と、によって主走査方向及び副走査方向の任意の位置に移動し、昇降移動機構404により、搬送対象物に対して離接させることができる。
搬送装置制御部は、情報入出力装置(図示略)を介して予め入力された制御プログラムに基づいて、天吊搬送装置410の各部の動作を統括制御する。
【0080】
主走査リニアモーター、副走査リニアモーター、及びボール軸受駆動モーターには、それぞれによる駆動距離を測定する距離センサーが接続されている。
副走査枠423又は保持機構412には、加速度センサー432a、加速度センサー432b、又は加速度センサー432cが固定されている。加速度センサー432a、加速度センサー432b、及び加速度センサー432cは、主走査方向、副走査方向、又は昇降方向の加速度を測定可能である。
主走査リニアモーター、副走査リニアモーター、又はボール軸受駆動モーターに接続された距離センサーによる、それぞれの方向における移動距離情報と、加速度センサー432a、加速度センサー432b、又は加速度センサー432cによる、それぞれの方向における加速度情報と、により、保持機構412の移動を制御することができる。距離センサーとしては、例えばリニアエンコーダーを用いることができる。
【0081】
移動距離情報及び加速度情報を用いて保持機構412の移動の制御を実行する際は、移動距離情報又は加速度情報などに閾値を予め設定し、移動距離情報又は加速度情報などを当該閾値と比較して、加速度情報のゲイン調整を行う。搬送装置制御部の動作制御部が、制御指令値と、移動距離情報と、ゲイン調整を行った加速度情報とを用いた制御を実施する。当該制御を実施することにより、主走査方向移動機構402、副走査方向移動機構403、及び昇降移動機構404の動作を制御して、保持機構412を任意の位置に移動し、位置決めする。
【0082】
<ヘッド搬送装置>
図13(b)に示すように、ヘッド搬送装置460は、印刷装置の吐出ヘッド462を移動させるものであり、ヘッドキャリッジ476、キャリッジ軸474、駆動ベルト473、駆動プーリー472、駆動モーター471、加速度センサー482、エンコーダー484等を備えている。印刷装置は、印刷装置の各部の動作を統括制御する印刷装置制御部(図示略)を備えている。
【0083】
駆動モーター471は図示しない装置枠に固定されており、駆動軸の一端に駆動プーリー472が固定されている。駆動プーリー472と図示しない従動プーリーとに、駆動ベルト473が張渡されており、駆動ベルト473は、駆動モーター471によって駆動される。キャリッジ軸474は、駆動ベルト473の延在方向と平行に配設されている。キャリッジ軸474には、ヘッドキャリッジ476がキャリッジ軸474の軸方向に摺動自在に嵌合して支持されている。ヘッドキャリッジ476は、駆動ベルト473と固定されており、駆動ベルト473が駆動されることにより、キャリッジ軸474に沿って移動させられる。ヘッドキャリッジ476に保持された吐出ヘッド462は、キャリッジ軸474の軸方向に移動させられ、任意の位置に保持される。
印刷装置制御部は、情報入出力装置(図示略)を介して予め入力された制御プログラムに基づいて、印刷装置の各部の動作を統括制御する。
【0084】
エンコーダー484は、駆動モーター471の駆動軸に接続されており、駆動モーター471の回動角度を測定することにより、吐出ヘッド462の移動距離を測定することができる。当該移動距離に対応する吐出ヘッド462の位置に対応する駆動モーター471の角度情報を、駆動モーター471の位置情報と表記する。加速度センサー482はヘッドキャリッジ476に固定されており、ヘッドキャリッジ476が駆動されることによってヘッドキャリッジ476に作用する加速度を測定可能である。エンコーダー484による位置情報と、加速度センサー482による加速度情報と、により、ヘッドキャリッジ476に保持された吐出ヘッド462の移動を制御することができる。
【0085】
位置情報及び加速度情報を用いて吐出ヘッド462の移動の制御を実行する際は、位置情報又は加速度情報などに閾値を設定し、位置情報又は加速度情報などを当該閾値と比較して、加速度情報のゲイン調整を行う。印刷装置制御部の動作制御部が、制御指令値と、位置情報と、ゲイン調整を行った加速度情報とを用いた制御を実施する。当該制御を実施することにより、駆動モーター471の動作を制御して、ヘッドキャリッジ476に保持された吐出ヘッド462を任意の位置に移動し、位置決めする。
【0086】
<レーザープリンター>
次に、前述した実施形態に係るロボットを応用してドラム状の部材の回動を制御する例として、レーザープリンター510について説明する。
図14は、レーザープリンターの要部の概略構成を示す説明図である。同図に示すように、レーザープリンター510は、感光体ドラム524、ドラム駆動モーター522、エンコーダー534、駆動伝達機構523、チャージ装置541、レーザー発振装置542、トナー供給装置543、転写ローラー544、定着ローラー546及び定着ローラー547、トナー回収装置548、角速度センサー532、プリンター制御部(図示略)等を備えている。
【0087】
感光体ドラム524は、駆動伝達機構523を介してドラム駆動モーター522に接続されており、ドラム駆動モーター522によって回動軸回りに回動させられる。感光体ドラム524の表面は、チャージ装置541によってマイナスに帯電させられ、レーザー発振装置542により、帯電部分が印刷物の形状に残されることで印刷物の形状が描かれ、トナー供給装置543によって供給されたトナーが、帯電した印刷物の形状に付着する。用紙549が転写ローラー544によって感光体ドラム524に圧着されて、トナーが用紙549に転写される。用紙549に転写されたトナーは、定着ローラー546及び定着ローラー547によって圧力と熱を加えて定着させる。トナーを転写した感光体ドラム524の表面は、トナー回収装置548によって不要なトナーが回収されて、再び上記工程が繰り返される。
プリンター制御部は、情報入出力装置(図示略)を介して予め入力された制御プログラムに基づいて、レーザープリンター510の各部の動作を統括制御する。
【0088】
ドラム駆動モーター522の駆動軸には、エンコーダー534が接続されており、エンコーダー534によってドラム駆動モーター522の回動角度を測定することにより、感光体ドラム524の角度情報を取得することができる。角速度センサー532は感光体ドラム524に固定されており、角速度センサー532によって感光体ドラム524が回動する角速度の情報を取得することができる。エンコーダー534によるドラム駆動モーター522の角度情報と、角速度センサー532による角速度情報と、により、感光体ドラム524の回動を制御することができる。
【0089】
角度情報及び角速度情報を用いて感光体ドラム524の回動の制御を実行する際は、角度情報又は角速度情報などに閾値を設定し、角度情報又は角速度情報などを当該閾値と比較して、角速度情報のゲイン調整を行う。プリンター装置制御部の動作制御部が、制御指令値と、角度情報と、ゲイン調整を行った角速度情報とを用いた制御を実施する。当該制御を実施することにより、ドラム駆動モーター522の動作を制御して、感光体ドラム524を任意の角度、回動させる。
【0090】
以上、添付図面を参照しながら好適な実施形態について説明したが、好適な実施形態は、前記実施形態に限られない。実施形態は、要旨を逸脱しない範囲内において種々変更を加え得ることは勿論であり、以下のように実施することもできる。
【0091】
(変形例1)
上述した実施形態においては、角速度情報、角度情報、移動距離情報、加速度情報、位置情報等について閾値を規定する例や、制御指令値の特徴点に対して時間軸において閾値を規定する例について説明したが、閾値を規定する対象はこれらに限られない。角速度情報や加速度度情報の値に影響を及ぼすノイズに閾値を設定して、当該ノイズのレベルによって角速度情報や加速度情報のゲイン調整を行うようにしても良い。角速度情報や加速度情報の値に影響を及ぼすノイズとしては、装置自身の機械振動や、周囲に存在する装置などの振動や、装置に供給される電力の振れや、周囲の電磁ノイズなどが挙げられる。
【0092】
(変形例2)
上述した実施形態においては、角速度センサー32による角速度情報や、加速度センサー432による加速度情報について閾値を規定する例について説明したが、閾値を規定する対象はこれらに限られない。閾値は、角速度情報や加速度情報の一回以上の積分値について規定しても良い。加速度情報の積分値は速度情報であって、速度情報は、角速度情報と同様に取り扱うことができる。加速度情報の二回積分値及び角速度情報の積分値は移動距離の情報であって、移動距離の情報は、角度情報や位置情報と同様に取り扱うことができる。
【0093】
(変形例3)
上述した実施形態においては、角度センサー34による角度情報や、距離センサーによる移動距離情報について閾値を規定する例について説明したが、閾値を規定する対象はこれらに限られない。閾値は、角度情報や移動距離情報の一回以上の微分値について規定しても良い。角度情報又は移動距離情報の微分値は、角速度又は移動速度であって、上述した角速度情報と同様に取り扱うことができる。角度情報又は移動距離情報の二回微分値は、角加速度又は加速度であって、上述した加速度情報と同様に取り扱うことができる。
【0094】
(変形例4)
上述した実施形態においては、角度情報や角速度情報や移動距離情報や加速度情報や位置情報などについて閾値を規定する例や、制御指令値の特徴点に対して時間軸において閾値を規定する例について説明した。これらの閾値を規定した対象は、制御を実行する際は、それぞれ単独で用いられていたが、閾値を規定した複数の対象を用いて制御を実行しても良い。例えば、角度情報及び角速度情報が共に閾値を超えた場合のみ、角速度情報のゲイン調整を行う制御を実行し、角度情報又は角速度情報の少なくとも一方が閾値を超えていない場合には、ゲイン調整を行わない制御を実行しても良い。また、角度情報や角速度情報や移動距離情報や加速度情報や位置情報などや、制御指令値の特徴点に対する時間軸などと、変形例1で説明した角速度情報や加速度情報の値に影響を及ぼすノイズレベルとを組み合わせても良い。この場合、例えば、角度情報や角速度情報や移動距離情報や加速度情報や位置情報などや、制御指令値の特徴点に対する時間軸などと、ノイズレベルとの両方が共に閾値を超えた場合のみ、ゲイン調整を行う制御を実行し、少なくとも一方が閾値を超えていない場合には、ゲイン調整を行わない制御を実行する。これにより、角速度情報などのノイズレベルが低レベルに保たれているにも関わらず、ノイズによる悪影響を回避するためにゲイン調整を行う制御を実施するというような状態を回避することができる。
【0095】
(変形例5)
上述した実施形態においては、ロボット及び搬送装置の例として、ロボット機構20を備えるロボット10、ロボット機構320を備えるロボット310、天吊搬送装置410、印刷装置が備えるヘッド搬送装置460、レーザープリンター510が備えるドラム駆動装置、などを例に説明した。しかし、上述した慣性センサーを用いた制御方法を用いて好適に制御できるロボット及び搬送装置は、これらの例示した装置に限られない。上述した慣性センサーを用いた制御方法を用いることで、移動体を所定の目的位置まで速やかに移動させると共に、当該位置に精度良く速やかに停止させることが好ましい装置を好適に制御することができる。
【符号の説明】
【0096】
10…ロボット、12…保持ハンド、20…ロボット機構、21…アーム、22…アーム駆動モーター、23…アーム駆動機構、24…ハンド保持機構、24a…保持軸受、24b…保持機構軸、26…アーム軸部、28…機台、30…ロボット制御部、32…角速度センサー、34…角度センサー、301…制御指令発生部、302…ゲイン調整部、303…アーム動作制御部、304…モータードライバー、305…角速度算出部、310…ロボット、320…ロボット機構、321…アーム、321a,321b…アーム部、323…アーム関節部、326…アーム軸部、328…機台、330…ロボット制御部、332a…角速度センサー、332b…角速度センサー、402…主走査方向移動機構、403…副走査方向移動機構、404…昇降移動機構、410…天吊搬送装置、412…保持機構、421…主走査ガイドレール、422…走査プレート、423…副走査枠、424…昇降軸、432…加速度センサー、432a…加速度センサー、432b…加速度センサー、432c…加速度センサー、460…ヘッド搬送装置、462…吐出ヘッド、471…駆動モーター、472…駆動プーリー、473…駆動ベルト、474…キャリッジ軸、476…ヘッドキャリッジ、482…加速度センサー、484…エンコーダー、510…レーザープリンター、522…ドラム駆動モーター、523…駆動伝達機構、524…感光体ドラム、532…角速度センサー、534…エンコーダー、541…チャージ装置、542…レーザー発振装置、543…トナー供給装置、544…転写ローラー、546…定着ローラー、547…定着ローラー、548…トナー回収装置、549…用紙。
【特許請求の範囲】
【請求項1】
一端を回動可能に支持されたアームと、前記アームを回動させる駆動源と、前記駆動源の回動角度を検出して角度情報を出力する角度センサーと、前記アームに取り付けられており、前記アームに作用する慣性力を検出して慣性力情報を出力する慣性センサーと、前記アームの回動動作を規定する制御指令値を出力する制御指令発生部と、
前記慣性力情報の重み付け値を漸次変化させて調整する重み付け調整部と、
前記制御指令値、前記角度情報、及び前記重み付け値によって重み付けされた前記慣性力情報に基づいて前記アームの動作を制御するアーム動作制御部と、を備えることを特徴とするロボット。
【請求項2】
前記重み付け調整部は、前記アームが停止状態から回動状態に移行する場合に前記慣性力情報の重み付け値を漸次増加させる調整と、前記アームが回動状態から停止状態に移行する場合に前記慣性力情報の重み付け値を漸次減少させる調整との、少なくとも1つの調整を行うことを特徴とする請求項1に記載のロボット。
【請求項3】
前記重み付け調整部は、時間の経過に伴い前記重み付け値の変化幅を大きくさせることを特徴とする請求項1又は2に記載のロボット。
【請求項4】
前記重み付け調整部は、前記アームの回動による前記アームの振動周期の半分以上の時間、前記重み付け値を変化させることを特徴とする請求項1から3のいずれか一項に記載のロボット。
【請求項5】
前記重み付け調整部は、前記慣性力情報と当該慣性力情報について予め設定された閾値とを比較して前記重み付け値を変化させることを特徴とする請求項1から4のいずれか一項に記載のロボット。
【請求項6】
前記重み付け調整部は、前記角度情報と当該角度情報について予め設定された閾値とを比較して前記重み付け値を変化させることを特徴とする請求項1から5のいずれか一項に記載のロボット。
【請求項7】
前記重み付け調整部は、前記制御指令値が規定する前記アームの回動動作の停止時点からの経過時間と、前記経過時間について予め設定された閾値とを比較して前記重み付け値を変化させるこことを特徴とする請求項1から6のいずれか一項に記載のロボット。
【請求項8】
一端を回動可能に支持されたアームと、前記アームを回動させる駆動源と、前記駆動源の回動角度を検出して角度情報を出力する角度センサーと、前記アームに取り付けられており、前記アームに作用する慣性力を検出して慣性力情報を出力する慣性センサーと、前記アームの回動動作を規定する制御指令値を出力する制御指令発生工程と、
前記慣性力情報の重み付け値を漸次変化させて調整する重み付け調整工程と、
前記制御指令値、前記角度情報、及び前記重み付け値によって重み付けされた前記慣性力情報に基づいて前記アームの動作を制御するアーム動作制御工程と、を備えることを特徴とするロボットの制御方法。
【請求項1】
一端を回動可能に支持されたアームと、前記アームを回動させる駆動源と、前記駆動源の回動角度を検出して角度情報を出力する角度センサーと、前記アームに取り付けられており、前記アームに作用する慣性力を検出して慣性力情報を出力する慣性センサーと、前記アームの回動動作を規定する制御指令値を出力する制御指令発生部と、
前記慣性力情報の重み付け値を漸次変化させて調整する重み付け調整部と、
前記制御指令値、前記角度情報、及び前記重み付け値によって重み付けされた前記慣性力情報に基づいて前記アームの動作を制御するアーム動作制御部と、を備えることを特徴とするロボット。
【請求項2】
前記重み付け調整部は、前記アームが停止状態から回動状態に移行する場合に前記慣性力情報の重み付け値を漸次増加させる調整と、前記アームが回動状態から停止状態に移行する場合に前記慣性力情報の重み付け値を漸次減少させる調整との、少なくとも1つの調整を行うことを特徴とする請求項1に記載のロボット。
【請求項3】
前記重み付け調整部は、時間の経過に伴い前記重み付け値の変化幅を大きくさせることを特徴とする請求項1又は2に記載のロボット。
【請求項4】
前記重み付け調整部は、前記アームの回動による前記アームの振動周期の半分以上の時間、前記重み付け値を変化させることを特徴とする請求項1から3のいずれか一項に記載のロボット。
【請求項5】
前記重み付け調整部は、前記慣性力情報と当該慣性力情報について予め設定された閾値とを比較して前記重み付け値を変化させることを特徴とする請求項1から4のいずれか一項に記載のロボット。
【請求項6】
前記重み付け調整部は、前記角度情報と当該角度情報について予め設定された閾値とを比較して前記重み付け値を変化させることを特徴とする請求項1から5のいずれか一項に記載のロボット。
【請求項7】
前記重み付け調整部は、前記制御指令値が規定する前記アームの回動動作の停止時点からの経過時間と、前記経過時間について予め設定された閾値とを比較して前記重み付け値を変化させるこことを特徴とする請求項1から6のいずれか一項に記載のロボット。
【請求項8】
一端を回動可能に支持されたアームと、前記アームを回動させる駆動源と、前記駆動源の回動角度を検出して角度情報を出力する角度センサーと、前記アームに取り付けられており、前記アームに作用する慣性力を検出して慣性力情報を出力する慣性センサーと、前記アームの回動動作を規定する制御指令値を出力する制御指令発生工程と、
前記慣性力情報の重み付け値を漸次変化させて調整する重み付け調整工程と、
前記制御指令値、前記角度情報、及び前記重み付け値によって重み付けされた前記慣性力情報に基づいて前記アームの動作を制御するアーム動作制御工程と、を備えることを特徴とするロボットの制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2013−66954(P2013−66954A)
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願番号】特願2011−205676(P2011−205676)
【出願日】平成23年9月21日(2011.9.21)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願日】平成23年9月21日(2011.9.21)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
[ Back to top ]