
ロボット掃除機及びその制御方法
【課題】ロボット掃除機の走行パターンまたは掃除パターンと補助掃除ツールの突出・収納動作及び回転動作とを連携付けて制御することによって、より効率的な掃除動作を行うことができるロボット掃除機及びその制御方法を提供する。
【解決手段】このロボット掃除機は、該ロボット掃除機の下部に突出及び収納可能に装着される補助掃除ユニットと、前記ロボット掃除機の掃除領域に位置している障害物を感知する感知部と、掃除領域の最外側部に沿って壁面追従方式で走行しながら前記補助掃除ユニットが前記ロボット掃除機の外部に突出されるように制御し、前記掃除領域の最外側部の走行が完了すると、前記掃除領域の内側部を走行しながら前記補助掃除ユニットが収納されるように制御する制御部と、備える。
【解決手段】このロボット掃除機は、該ロボット掃除機の下部に突出及び収納可能に装着される補助掃除ユニットと、前記ロボット掃除機の掃除領域に位置している障害物を感知する感知部と、掃除領域の最外側部に沿って壁面追従方式で走行しながら前記補助掃除ユニットが前記ロボット掃除機の外部に突出されるように制御し、前記掃除領域の最外側部の走行が完了すると、前記掃除領域の内側部を走行しながら前記補助掃除ユニットが収納されるように制御する制御部と、備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、補助掃除ツールを備えて効率的な掃除動作を行うロボット掃除機及びその制御方法に関する。
【背景技術】
【0002】
ロボット掃除機は、使用者の操作なく、掃除領域を自律走行しながら床面からホコリなどの異物を除去することで当該領域を自動で掃除する。
【0003】
ロボット掃除機は、各種のセンサーなどを用いて、掃除領域内に位置している障害物または壁を感知し、感知結果に基づいてロボット掃除機の走行経路及び掃除動作を制御する。
【0004】
ロボット掃除機は、あらかじめ設定された走行パターンに従って走行しながら掃除作業を反復して行うが、掃除領域に障害物や壁が存在している場合には、障害物または壁と床とが接する箇所まではメインブラシが届きにくく、丁寧に掃除することが困難である。
【0005】
そこで、ロボット掃除機は、ロボット掃除機の外部に突出する補助掃除ツールを有し、このロボット掃除機の補助掃除ツールは、掃除機本体の両側部に装着されて回転しつつ、床上のホコリなどを、掃き集めたり、分散させたり、吸い込んだりなどして除去する。
【0006】
しかしながら、既存のロボット掃除機は、補助掃除ツールの動作がロボット掃除機の走行パターンと連携して制御されず、効率的に掃除動作を行うことが難しいという問題点があった。
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は、ロボット掃除機の走行パターンまたは掃除パターンと補助掃除ツールの突出・収納動作及び掃除動作とを連携して制御することによって、より効率的な掃除動作を行うことができるロボット掃除機及びその制御方法を提供する。
【課題を解決するための手段】
【0008】
一側面に係る、床を走行しつつ該床から異物を除去するロボット掃除機は、前記ロボット掃除機の下部に突出及び収納可能に装着される補助掃除ユニットと、前記ロボット掃除機の掃除領域に位置している障害物を感知する感知部と、掃除領域の最外側部に沿って壁面追従方式で走行しながら前記補助掃除ユニットが突出されるようにし、前記掃除領域の最外側部の走行が完了すると、前記掃除領域の内側部を走行しながら前記補助掃除ユニットが収納されるようにする制御部と、を備える。
【0009】
前記制御部は、前記補助掃除ユニットのうち、前記壁面側の補助掃除ユニットのみ突出されるように制御する。
【0010】
前記制御部は、前記壁面追従方式で走行する場合における走行速度を、前記掃除領域の内側部を走行する場合における走行速度よりも低く制御する。
【0011】
前記感知部は、前記掃除領域に位置している障害物を感知し、かつ超音波センサー、近接センサー及び光センサーのいずれか一つ以上からなる障害物感知部と、前記掃除領域の床に存在するホコリを感知し、かつ光センサーからなるホコリ感知部と、を備える。
【0012】
前記制御部は、前記感知部が、前記ロボット掃除機の壁面追従方式による走行中に前方に位置する壁を感知した場合に、前記補助掃除ユニットの掃除速度を上げる。
【0013】
前記制御部は、前記ホコリ感知部で感知したホコリの量が、あらかじめ設定された基準値以上であると、前記補助掃除ユニットの突出及び収納を一定周期で反復する。
【0014】
他の側面に係る、床を走行しつつ該床から異物を除去するロボット掃除機は、前記ロボット掃除機の下部に突出及び収納可能に装着される補助掃除ユニットと、前記ロボット掃除機の掃除領域に位置している障害物またはホコリを感知する感知部と、使用者の命令または前記感知部の感知結果に基づいて第1掃除モードまたは第2掃除モードを設定する制御部と、を備え、ここで、前記第1掃除モードは、前記感知部が障害物を感知した場合に、前記補助掃除ユニットを突出させて、前記障害物と床とが接する箇所まで掃除する掃除モードとし、前記第2掃除モードは、前記感知部が障害物を感知した場合に、前記補助掃除ユニットを突出させないで速やかに掃除する掃除モードとすることができる。
【0015】
前記感知部は、前記掃除領域に位置している障害物を感知し、且つ超音波センサー、光センサー及び近接センサーのいずれか一つ以上からなる障害物感知部と、前記掃除領域の床に存在するホコリを感知し、且つ光センサーからなるホコリ感知部と、を有する。
【0016】
前記第2掃除モードは、前記感知部が障害物を感知するまで前記補助掃除ユニットを突出させる。
【0017】
前記ロボット掃除機は、使用者から掃除モードの選択命令が入力される入力部をさらに備え、前記制御部は、前記入力部を介して選択された掃除モードに従って前記ロボット掃除機の掃除動作を制御する。
【0018】
前記制御部は、掃除開始命令が入力されると、前記ロボット掃除機が掃除を行う掃除領域に存在している障害物の個数を把握するために試験走行をするように制御し、前記感知部は、前記試験走行中に前記掃除領域に存在する障害物を感知し、その結果を前記制御部に伝送する。
【0019】
前記制御部は、前記感知部の感知結果に基づいて前記掃除領域に存在している障害物の個数を算出し、前記算出された障害物の個数が、あらかじめ設定された基準値以上である場合には、第2掃除モードに従って掃除動作を制御し、前記算出された障害物の個数が、あらかじめ設定された基準値未満である場合には、第1掃除モードに従って掃除動作を制御する。
【0020】
前記制御部は、前記ホコリ感知部で感知したホコリの量が、あらかじめ設定された基準値以上であると、前記補助掃除ユニットの突出と収納を一定周期で反復する。
【0021】
他の側面に係る、突出及び収納可能に装着される補助掃除ユニットを有するロボット掃除機の制御方法は、掃除開始命令が入力されると、前記ロボット掃除機が壁面追従方式で走行するか否かを判断し、前記ロボット掃除機が壁面追従方式で走行すると、前記補助掃除ユニットを前記ロボット掃除機の外部に突出させ、前記ロボット掃除機の壁面追従方式の走行が終了したか否かを判断し、前記壁面追従方式の走行が終了すると、前記補助掃除ユニットを収納させる。
【0022】
前記壁面追従方式による走行時に、前記補助掃除ユニットのうち、前記壁面側の補助掃除ユニットのみを突出させる。
【0023】
前記壁面追従方式による走行時の前記ロボット掃除機の走行速度を、前記壁面追従方式以外の走行時の前記ロボット掃除機の走行速度よりも低く制御する。
【0024】
さらに、前記ロボット掃除機の前方に存在する障害物を感知し、前記壁面追従方式で走行中に前方に壁面が存在することを感知すると、前記補助掃除ユニットの掃除速度を上げる。
【0025】
さらに、前記ロボット掃除機の走行経路上のホコリを感知し、前記感知されたホコリの量が、あらかじめ設定された基準値以上であると、前記補助掃除ユニットの突出と収納を一定周期で反復させる。
【0026】
さらに他の側面に係る、突出及び収納可能に装着される補助掃除ユニットを有するロボット掃除機の制御方法は、使用者の命令または障害物の感知結果に基づいて第1掃除モードまたは第2掃除モードを設定し、前記第1掃除モードでは、前記ロボット掃除機が掃除を行う掃除領域から障害物が感知されると前記補助掃除ユニットを突出させ、前記障害物と床とが接する箇所まで掃除を行い、前記第2掃除モードでは、前記掃除領域から障害物が感知されると、前記補助掃除ユニットを突出させないで速やかに掃除を行う。
【0027】
前記第2掃除モードにおいて、前記掃除領域から障害物が感知されるまで前記補助掃除ユニットを突出させる。
【0028】
さらに、前記ロボット掃除機の掃除領域に存在する障害物を感知し、前記感知結果に基づいて前記障害物の個数を算出し、該算出された障害物の個数が、あらかじめ設定された基準値以上であると、第2掃除モードに従って前記ロボット掃除機の掃除動作を制御する。
【0029】
前記ロボット掃除機の走行経路上のホコリを感知し、前記感知されたホコリの量があらかじめ設定された基準値以上であると、前記補助掃除ユニットの突出及び収納を一定周期で反復させる。
【発明の効果】
【0030】
本発明のロボット掃除機及びその制御方法によれば、壁面追従方式による走行時には補助掃除ツールを突出させることによって、障害物または壁と床とが接する地点や壁面同士が接する地点のような、メインブラシの届かない箇所を効果的に掃除すると同時に、掃除領域の内側部の走行時には補助掃除ツールを収納させることによって掃除の効率を向上させることが可能になる。
【0031】
なお、一側面に係るロボット掃除機及びその制御方法によれば、使用者の命令または掃除領域の環境に応じて補助掃除ツールの突出、収納を制御することによって、使用者の要求または掃除領域の環境に適した掃除を行うことが可能になる。
【図面の簡単な説明】
【0032】
【図1】一実施例に係るロボット掃除機の斜視図である。
【図2】一実施例に係るロボット掃除機の下面図である。
【図3】各補助掃除ユニットの突出及び収納を可能にする構造に関する一実施例を概略的に示す図である。
【図4】各補助掃除ユニットの突出及び収納を可能にする構造に関する他の実施例を概略的に示す図である。
【図5】一実施例に係る補助掃除ツールの構成を概略的に示す図である。
【図6】他の実施例に係る補助掃除ツールの構成を概略的に示す図である。
【図7】一実施例に係るロボット掃除機の制御ブロック図である。
【図8A】一実施例に係るロボット掃除機の走行及び掃除動作を上から見た全体構成図である。
【図8B】一実施例に係るロボット掃除機の走行及び掃除動作を上から見た全体構成図である。
【図9】壁と壁とが接する地点におけるロボット掃除機を示す図である。
【図10】図8A及び図8Bに示すロボット掃除機において、壁面側の補助掃除ツールのみを突出させた場合を示す図である。
【図11】一実施例に係るロボット掃除機における走行制御部の具体的な制御ブロック図である。
【図12】一実施例に係るロボット掃除機により撮影された映像である。
【図13】実際に作成された特徴マップの例を示す断面図である。
【図14】実際に作成された経路マップを示す図である。
【図15】図8A及び図8Bにおけるロボット掃除機がホコリ過多領域を走行する時の動作を示す図である。
【図16】第1掃除モードで掃除動作を行う場合におけるロボット掃除機の動作を、上から見た平面図である。
【図17】第2掃除モードで掃除動作を行う場合におけるロボット掃除機の動作を、上から見た平面図である。
【図18A】一実施例に係るロボット掃除機がホコリ過多領域を走行する時の動作を、上から見た平面図である。
【図18B】一実施例に係るロボット掃除機がホコリ過多領域を走行する時の動作を、上から見た平面図である。
【図19】図8A及び図8Bに示すロボット掃除機の制御方法を示すフローチャートである。
【図20】図8A及び図8Bに示すロボット掃除機が壁面追従方式による走行中に壁に対面する時における制御方法を示すフローチャートである。
【図21】図8A及び図8Bに示すロボット掃除機がホコリ過多領域を走行する時における制御方法を簡略に示すフローチャートである。
【図22】図16及び図17に示すロボット掃除機の制御方法を示すフローチャートである。
【発明を実施するための形態】
【0033】
以下、添付の図面を参照して、本発明の実施例を詳細に説明する。
【0034】
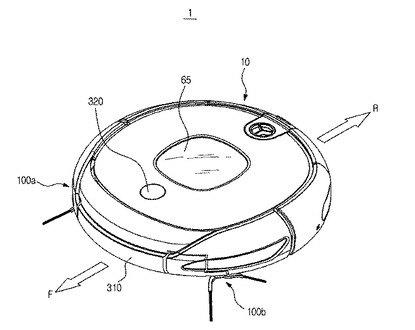
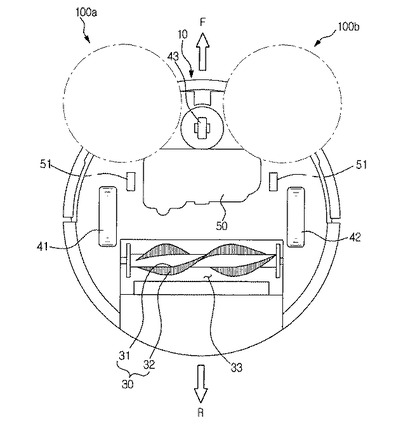
図1及び図2を参照すると、ロボット掃除機1は、外観を形成する本体10と、床上のホコリを掃いて吸込み口へ導くメインブラシユニット30と、本体10を駆動させるための駆動電源を供給する電源部50と、本体10を走らせる駆動輪41,42及びキャスター43と、壁面との隣接部及び隅部を掃除するための補助掃除ユニット100a,100bと、で構成される。
【0035】
駆動輪41,42は、本体10の下部において中央領域の左右端部に対称に2つが配置される。駆動輪41,42は、ロボット掃除機1が掃除を行いつつ前進、後進及び回転走行などの移動動作を行えるようにする。
【0036】
走行方向を基準に本体10の下部の前方端部にキャスター43が取り付けられる。該キャスター43は、ロボット掃除機1が移動する床の状態に応じて回転角度が変化し、本体10が安定した姿勢を維持できるようにする。駆動輪41,42とキャスター43とを一つのアセンブリーにし、本体10に着脱可能に装着することができる。
【0037】
電源部50は、本体10、及び本体10に装着された各種の部品を駆動させる各駆動装置と電気的に連結されて駆動電源を供給するバッテリーを含む。バッテリーは、再充電可能な2次バッテリーとし、本体10が掃除過程を完了してドッキングステーション(図示せず)に結合すると、ドッキングステーション(図示せず)から供給される電力で充電する。
【0038】
メインブラシユニット30は、本体10の下部において中央領域から後方Rへ偏った部分に形成された開口に装着される。
【0039】
メインブラシユニット30は、本体10が置かれている床に積もったホコリなどの異物を掃除する。メインブラシユニット30が装着される本体10の下部における開口は、ホコリ流入口33となる。
【0040】
メインブラシユニット30は、ローラ31と、ローラ31の外面に形成されているメインブラシ32と、で構成される。ローラ31の回転と共に、メインブラシ32は、床に積ったホコリをかき回してホコリ流入口33に導く。ローラ31は、鋼体とすることができるが、これに限定されるものではない。メインブラシ32は、弾性力を有する様々な材質とすることができる。
【0041】
図示してはいないが、ホコリ流入口33の内部には、吸入力を発生させる送風装置が設けられて、ホコリ流入口33に流入したホコリを集塵装置55へと移動させる。
【0042】
本体10には、ロボット掃除機1の周囲環境を感知できる感知部60が装着される。感知部60は、近接センサー61及び/またはビジョンセンサー62を有してなることができる。例えば、定められた経路無しでロボット掃除機1が任意の方向に走行する場合、すなわち、マップのない掃除システムにおいて、ロボット掃除機1は近接センサー61を用いて掃除領域を走行することが可能である。一方、定められた経路に従ってロボット掃除機1が走行する場合、すなわち、マップを必要とする掃除システムでは、ロボット掃除機1の位置情報を取り込んでマップを生成するためのビジョンセンサー62を装着することができる。感知部60は、上記に限定されるものではなく、多様な方式で具現可能である。
【0043】
ディスプレイ部65は、ロボット掃除機1の各種状態を示すことができる。例えば、バッテリーの充電状態、集塵装置55がホコリで満ちているか否か、ロボット掃除機1の掃除モード、休眠モードなどを示すことができる。
【0044】
また、図示してはいないが、一実施例に係るロボット掃除機1は入力部を備え、使用者からの走行モード、掃除モードまたは電源on/offなどに関する命令を受信することができる。
【0045】
以下、図3乃至図6を参照して、図示の実施例に係るロボット掃除機に備えられる補助掃除ユニット100a,100bの構成及び構造について説明する。
【0046】
補助掃除ユニット100a,100bは、ロボット掃除機の下部に突出及び収納可能に装着される。補助掃除ユニット100a,100bの突出及び収納を可能にする構造には様々な実施例があり、以下では、その2つの実施例について説明する。
【0047】
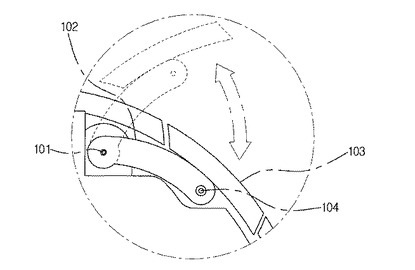
図3は、各補助掃除ユニットを突出及び収納可能にする構造に関する実施例を概略的に示す図である。左右の補助掃除ユニットの基本的な構造は同一でよいため、以下では、左側の補助掃除ユニット100bと右側の補助掃除ユニット100aとを区別することなく補助掃除ユニット100と総称して説明する。
【0048】
図3を参照すると、補助掃除ユニット100は、サイドアーム102及び縁カバー103を備える。
【0049】
本体10の前方一側の下部にはサイドアーム102が結合され、その上側には、サイドアーム102を駆動させるアームモーター(図示せず)が収容される。アームモーターは、サイドアーム102に駆動力を伝達する所定のギアを介して回転軸(図示せず)と連結され、この回転軸が、サイドアーム102の一端に形成された結合溝101に装着される。
【0050】
そのため、アームモーターが駆動すると、回転軸が回転しつつサイドアーム102は結合溝101を基準に揺動する。この時、サイドアーム102が本体10の外側に揺動するとともに、縁カバー103は、本体10の開口をそれ以上覆わず、本体10の周縁を形成しなくなる。
【0051】
サイドアーム102の他端には、補助掃除ツールが結合される結合溝104が形成される。その上側には、補助掃除ツールを駆動させる回転モーター(図示せず)が収容され、該回転モーターの駆動力によって補助掃除ツールが結合溝104を基準に回転することとなる。
【0052】
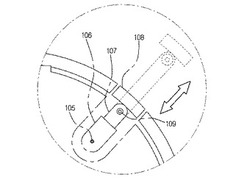
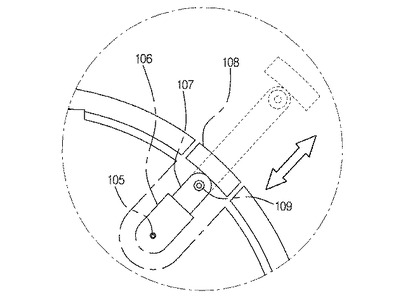
図4も、各補助掃除ユニットを突出及び収納可能にする構造に関する実施例を概略的に示す図である。
【0053】
図4を参照すると、補助掃除ユニット100は、サイドアーム106、及び縁カバー108を備える。
【0054】
本体10の前方一側の下部には、サイドアーム106が結合溝105に沿って結合され、サイドアーム106の内部には、サイドアーム106の外部へスライドして伸びる延長アーム107が収容される。
【0055】
延長アーム107は、サイドアーム106の内部でサイドアーム106の長手方向に沿って前後に移動する。そのために、サイドアーム106の内部にはレールが設けられ、延長アーム107にはガイド(図示せず)が設けられ、延長アーム107はレールに固定されたままレールに沿って滑動することができる。また、延長アーム107の内部には、延長アーム107の外部へスライドして突出する他の延長アームが収容されてもよい。他の延長アームも延長アーム107と同様の方式で移動すればよく、延長アームの数は制限されない。
【0056】
そして、サイドアーム106の上側には、延長アーム107を駆動させるアームモーター(図示せず)が収容される。アームモーターは、所定のギアを介して延長アーム107に駆動力を伝達し、アームモーターが駆動すると延長アーム107がサイドアーム106の外部にスライドしつつ本体10の外側へ突出する。この時、縁カバー108は、本体10の開口をそれ以上覆わず、本体10の周縁を形成しなくなる。
【0057】
そして、延長アーム107の先端には、補助掃除ツールが結合される結合溝109が形成される。その上側には、補助掃除ツールを駆動させる回転モーター(図示せず)が収容され、該回転モーターの駆動力によって補助掃除ツールが結合溝109を基準に回転する。
【0058】
補助掃除ユニットは、補助掃除ツールを有し、補助掃除ツールにより掃除を行う。補助掃除ツールは、ホコリなどの異物を掃き集めたり分散させたりするブラシを有することもでき、床を拭く雑巾を有することもでき、ホコリなどの異物を吸い込む吸込み器を有することもできる。ただし、これらの補助掃除ツールは例示に過ぎず、補助的に掃除を行えるものであれば、いかなる種類の補助掃除ツールも可能である。
【0059】
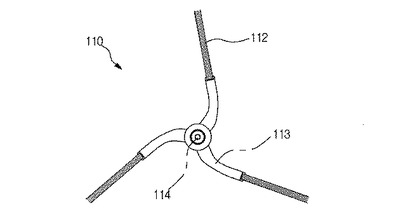
図5は、一実施例に係る補助掃除ツールの構成を概略的に示す図である。
図5を参照すると、補助掃除ツール110は、中央の共通端部から半径方向外側に延在すると共に、周方向に互いに離れて配置されるブラシアーム113を備える。ブラシアーム113には補助ブラシ112が結合され、ブラシアーム113の中央の共通端部から突出した回転軸114が、結合溝を通ってサイドアーム102、または延長アーム107と結合される。補助掃除ツール110が回転すると、補助ブラシ112が壁面との隣接部などに積もったホコリを、本体10の中央領域に掃き集めたり、分散させたりする。
【0060】
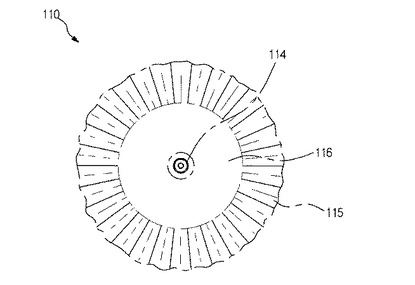
図6は、一実施例に係る補助掃除ツールの構成を概略的に示す図である。
【0061】
図6を参照すると、補助掃除ツール110は、円形の雑巾ホルダー116を有し、該雑巾ホルダー116には、雑巾ホルダー116の周方向に補助雑巾115が装着される。雑巾ホルダー116の中心には、回転モーターの駆動力が伝達されて補助掃除ツール110を回転させる回転軸114が突設され、この回転軸114が結合溝を通ってサイドアーム102、または延長アーム107と結合される。補助掃除ツール110が回転すると、補助雑巾115が壁面との隣接部などを拭くこととなる。
【0062】
図6の実施例が図4の実施例と共に適用される場合に、補助掃除ユニット100の掃除動作は、補助掃除ツール110の回転と、延長アーム107の突出及び収納の反復と、が同時に行われるようにしてもよく、補助掃除ツール110は回転せずに、延長アーム107の突出及び収納の反復のみが行われるようにしてもよい。
【0063】
一方、補助ブラシ112は、弾性の様々な材質とすることができ、補助雑巾115は、繊維材質の他にも、様々な材質とすることができる。
【0064】
図示の実施例に係るロボット掃除機1は、本体10の外側に突出する補助掃除ユニット100a,100bにより、掃除領域が広くなり、壁面との隣接部や床の隅部まで掃除可能になる。
【0065】
図1乃至図6の実施例では、補助掃除ユニット100がロボット掃除機1の両側部に2つ設けられるとしたが、それに限定されるものではなく、補助掃除ユニット100の個数及び装着位置には制限がない。ただし、説明の便宜上、後述する実施例では、補助掃除ユニット100が、図1乃至図6の実施例のように、ロボット掃除機1の両側部に2つ設けられるとする。
【0066】
以下、上述した構成に基づいて、図示の実施例に係るロボット掃除機1の走行及び掃除動作について詳細に説明する。
【0067】
以下に説明する実施例では、ロボット掃除機の走行中には基本的にメインブラシユニットによる掃除がなされるとする。
【0068】
また、上述したように、実施例に適用可能な補助掃除ツール110は、ブラシ、雑巾などの様々な形態とすることができるが、以下の実施例では、説明の便宜上、補助掃除ツール110がブラシ形態であるとして説明する。
【0069】
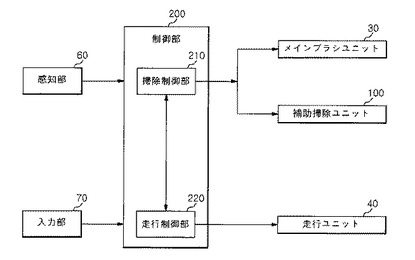
図7は、一実施例に係るロボット掃除機1の制御ブロック図である。
【0070】
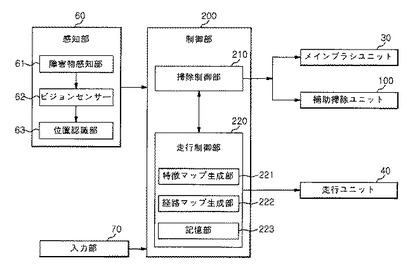
図7を参照すると、図示の実施例に係るロボット掃除機1は、ロボット掃除機1の周辺環境を感知する感知部60と、使用者からロボット掃除機1の走行または掃除動作に関する命令が入力される入力部70と、感知部60の感知結果または入力部70に入力された命令に基づいてロボット掃除機1の走行及び掃除動作を制御する制御部200と、掃除を行うメインブラシユニット30及び補助掃除ユニット100と、ロボット掃除機1の走行を行う走行ユニット40と、を備える。
【0071】
感知部60は、ロボット掃除機1の移動中に近接する障害物を感知する。感知部60は、超音波センサー、光センサーまたは近接センサーとすることができる。超音波センサーとした感知部60は、走行する経路に超音波を発信し、反射される超音波を受信することで障害物を感知することができる。光センサーとした感知部60は、赤外線発光素子が赤外線を発し、赤外線受光素子が、反射された赤外線を受信することで、障害物を感知することができる。その他にも、感知部60は、近接センサー、接触センサーなどとすることもでき、障害物を感知できるいかなる構成にしてもよい。
【0072】
入力部70では、使用者からロボット掃除機1の掃除動作または走行に関する命令が入力される。基本的に、on/off入力によって掃除開始命令または掃除終了命令を入力することができ、走行モード及び掃除モードに関する命令を入力することができる。入力部70は、ロボット掃除機1の本体10に設けられ、ボタン方式で構成されてもよく、ディスプレイ部65にタッチパネル方式で構成されてもよい。
【0073】
制御部200は、ロボット掃除機1の動作全般を制御するもので、大きく、掃除動作を制御する掃除制御部210と、走行を制御する走行制御部220と、を有する。
【0074】
掃除制御部210は、感知部60の感知結果または入力部70から入力された使用者の命令に基づいて設定された掃除モードに従ってメインブラシユニット30及び補助掃除ユニット100を制御する。
【0075】
走行制御部220も同様に、感知部60の感知結果または入力部70から入力された使用者の命令に基づいて走行ユニット40を制御し、ロボット掃除機1の走行方向及び走行速度を制御する。
【0076】
掃除制御部210及び走行制御部220の具体的な動作については後述する。
【0077】
メインブラシユニット30は、上述の通り、ローラ31と、ローラ31の外面に形成されたメインブラシ32と、で構成される。ローラ31が回転すると、メインブラシ32は、床に積もったホコリを掻き回してホコリ流入口33へ導き、主な掃除動作を行う。そのために、掃除制御部210が、ローラ31を駆動させる駆動モーターに制御信号を伝送し、該制御信号に応じてメインブラシ32が掃除動作を行う。
【0078】
補助掃除ユニット100は、メインブラシユニット30だけでは十分に掃除できない隅部を掃除する機能を有する。補助掃除ユニット100は、補助掃除ツール110の突出及び収納動作を行うサイドアーム102,106及び/または延長アーム107と、補助掃除ツール110を回転させる回転モーターと、サイドアーム102,106及び/または延長アーム107を駆動させるアームモーターと、を備える。
【0079】
走行ユニット40は、上述の通り、駆動輪41,42、キャスター43、及びこれらを駆動させる駆動部を備える。そのため、走行制御部220は、駆動部に制御信号を伝送し、駆動輪41,42を前方または後方に駆動させてロボット掃除機1を前方または後方へ移動させることができる。なお、走行制御部220は、左側駆動輪41,42を後方へ移動させつつ右側駆動輪41,42を前方に駆動させることで、ロボット掃除機1を前方を基準に左側方向に回転させたり、これと逆に駆動させることで、ロボット掃除機1を前方を基準に右側方向に回転させたりすることもできる。
【0080】
以下、一実施例に係るロボット掃除機1の動作について説明する。
【0081】
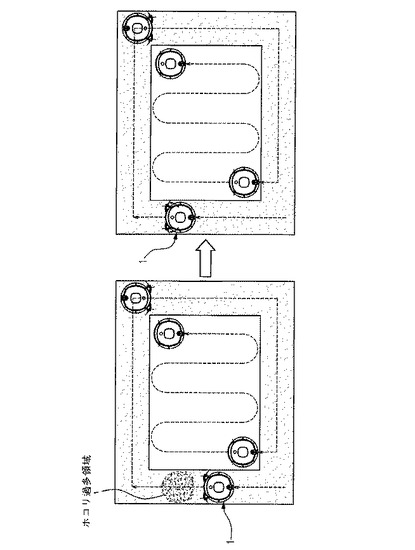
図8A及び図8Bは、一実施例に係るロボット掃除機1の走行及び掃除動作を上から見た全体構成図である。
【0082】
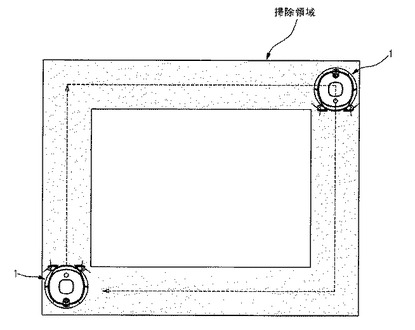
使用者が入力部70を介して掃除開始命令を入力すると、ロボット掃除機1の走行及び掃除動作が始まる。この時、走行制御部220の走行モードは、掃除領域の最外側部に沿って壁面追従方式の走行をした後に、掃除領域の内側部をランダム方式または所定の走行パターンに従って走行するものと設定することができる。
【0083】
図8Aを参照すると、一実施例に係るロボット掃除機1が掃除領域の最外側部を壁面追従方式で走行する時に、床面と壁とが接する部分は、メインブラシユニット30のブラシ32が届かず、完全に掃除することが難しい。なお、床面と壁とが接する部分は、ホコリがより多く積もる箇所であって、丁寧に掃除する必要がある。そのために、ロボット掃除機1は、壁面追従方式で走行する時に補助掃除ユニット100を外部に突出させ、床面と壁とが接する部分を掃除する。
【0084】
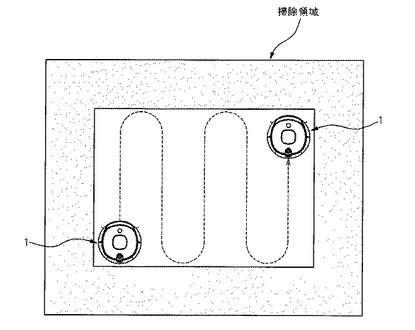
図8Bを参照すると、一実施例に係るロボット掃除機1は、掃除領域の最外側部に対する壁面追従方式の走行を終えると、掃除領域の内側部に対する走行を始める。この時、図8Bに示すようにジグザグ上の走行にしてもよいが、その他のパターンの走行またはランダム方式の走行にしてもよい。
【0085】
ここで、掃除領域の内側部は、図8Bに示すように、壁面追従方式の走行によって掃除を完了した領域以外の領域にしてもよく、壁面追従方式の走行によって掃除を完了した領域を含む領域にしてもよいが、前者にすれば、掃除を短時間で完了でき、後者にすれば、掃除をより丁寧に行うことができる。
【0086】
ロボット掃除機1が掃除領域の内側部を走行する時には、突出した補助掃除ツール110を引き込んで収納する。掃除領域の内側部にはメインブラシ32の届かない隅部がないため、補助掃除ユニット100を使用しないでメインブラシユニット30を用いるだけでも十分に掃除ができる。もし、ロボット掃除機1が掃除領域の内側部において障害物に接触すると、補助掃除ツール110が突出して障害物との隅部を掃除するようにしてもよい。
【0087】
また、補助掃除ユニット100を収納した状態で補助掃除ツール110を回転させることもでき、こうすると、ロボット掃除機1が走行しながらメインブラシユニット30の届かない領域が発生する場合に、該領域への掃除を行うことができる。
【0088】
ただし、図8A及び図8Bの走行経路または走行パターンは一実施例に過ぎず、ロボット掃除機1の全体走行経路または走行パターンを問わず、壁面追従方式の走行パターンでは補助掃除ユニット100を突出させ、ジグザグ方式、ランダム方式などのその他の走行時には補助掃除ツール110を収納する実施例も可能である。
【0089】
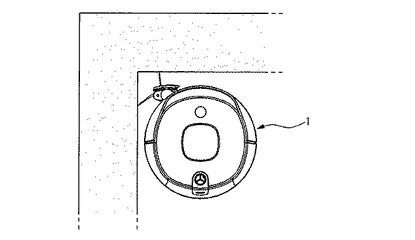
図9を参照すると、壁と壁とが接する地点は、ロボット掃除機1の構造上、メインブラシ32だけでは十分に掃除しにくく、ホコリもよく積もる箇所である。
【0090】
そのため、ロボット掃除機1が壁面追従方式で走行しながら、掃除領域内の壁と壁とが接する地点に位置するようになると、補助掃除ツール110の回転速度を上げることで、定められた時間内でより効率的な掃除を行うことができる。参考として、補助掃除ユニット100が、図4及び図6の実施例の組み合わせで具現されるとすれば、補助掃除ツール110の掃除速度を上げることによって効率的な掃除を行うことができる。ここで、掃除速度は、延長アーム107の突出及び収納の反復速度を考慮した速度でもよく、補助掃除ツール110の回転速度と延長アーム107の突出及び収納の反復速度との両方を考慮した速度でもよい。
【0091】
そのために、感知部60が障害物感知結果を制御部200に伝送し、掃除制御部210は、該感知結果を分析し、壁面追従方式で走行中のロボット掃除機1の前方に障害物が位置する場合には、補助掃除ツール110の回転速度を上げる旨の制御信号を補助掃除ユニット100に送信する。
【0092】
感知部60として、ロボット掃除機1と隣接した障害物のみを認識できるセンサーを用いる場合には、障害物が存在するという感知結果のみに基づいて補助掃除ツール110の回転速度を上げても構わないが、遠距離の障害物を認識できるセンサーを用いる場合には、壁と壁とが接する地点にロボット掃除機1が位置したと見なし得る十分に短い距離を基準値としてあらかじめ設定し、感知部60の感知結果による障害物とロボット掃除機1との間の距離が上記基準値以下の場合に補助掃除ツール110の回転速度を上げることも可能である。
【0093】
図8Aの実施例では、ロボット掃除機1の両側の補助掃除ツールを突出させているが、図10に示すように、壁面側の補助掃除ツールのみを突出させ、残りの補助掃除ツールは突出させなくてもよい。
【0094】
上述の実施例において、ロボット掃除機1の走行は、あらかじめ設定された経路マップまたは特徴マップに基づくようにしてもよく、マップを使用せずに障害物の有無のみを判断して回転または直進走行をランダムに決定する方式にしてもよい。
【0095】
以下、経路マップまたは特徴マップに基づいて走行する場合の実施例について具体的に説明する。
【0096】
図11は、一実施例に係るロボット掃除機1における走行制御部220の具体的な制御構成を示すブロック図である。
【0097】
一実施例に係るロボット掃除機1は、図7で上述したように、ロボット掃除機1の周辺環境を感知する感知部60、使用者から命令が入力される入力部70、ロボット掃除機1の掃除動作及び走行を制御する制御部200、メインブラシユニット30、補助掃除ユニット100、及び走行ユニット40を備える。
【0098】
感知部60は、障害物を感知する超音波センサー、光センサー、近接センサーなどの障害物感知部61を有することができ、経路マップ生成のために特徴点を抽出するのに適した周辺映像を撮影するビジョンセンサー62をさらに有することができる。周辺映像は、天井、壁面、床を含むことができ、映像変化の可能性の少ない天井が周辺映像として最も好適である。以下、周辺映像として天井を用いる例を挙げて説明する。
【0099】
ビジョンセンサー62には、CCD(Charge Coupled Device)、CMOS(Complementary Metal Oxide Semiconductor)またはその他の映像取得手段を用いることができる。ビジョンセンサー62は、取得した映像のアナログ信号をデジタル信号に変換するADC(Analog−to−Digital Converter)を備えることができる。
【0100】
また、感知部60は、ロボット掃除機1の現在位置を認識できるエンコーダ、ジャイロセンサー、加速度センサーなどの位置認識部63をさらに有することができる。
【0101】
エンコーダは、駆動輪41,42と連結されて回転速度を感知する。エンコーダで感知された回転速度を積分すると、ロボット掃除機1の位置(または、動いた距離)及び方向角がわかる。ジャイロセンサーは、回転慣性を用いてロボット掃除機1の方向角を測定することができる。加速度センサーは、ロボット掃除機1の運動加速度を二重積分してロボット掃除機1の位置を測定することができる。
【0102】
走行制御部220は、ビジョンセンサー62で取得された天井映像から複数の特徴点を抽出して特徴マップを生成する特徴マップ生成部221、ロボット掃除機1の経路マップを生成する経路マップ生成部222、及び生成されたマップを記憶する記憶部223を備える。
【0103】
特徴マップ生成部221は、ビジョンセンサー62で取得された天井映像から複数の特徴点を抽出して特徴マップを生成する。特徴マップは、周辺環境において一定に測定される特徴点からなっている。特徴点は、特定位置固有の特徴が現れる点のことを指す。
【0104】
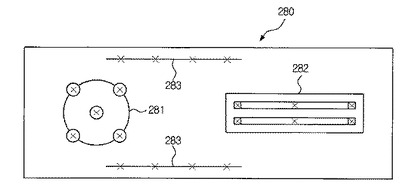
図12を参照すると、天井映像280には、シャンデリア281、蛍光灯282、隅部分283など、他の位置と区別されるようにする細部映像を含むことがある。それらの細部映像に特徴点を表示した後に、ロボット掃除機1が移動しながら撮影した映像から、表示された特徴点と同じ特徴点を発見すると、ロボット掃除機1のポーズ(位置及び方向角)が把握できる。
【0105】
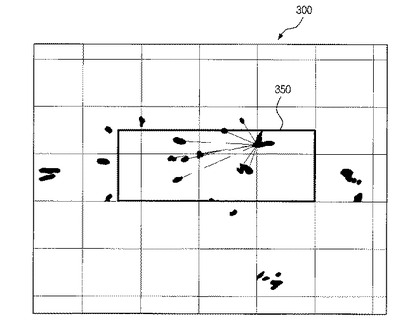
図13は、実際に作成された特徴マップの例を示す断面である。特徴マップ300には様々な形態の特徴点が含まれ、地理的に隣接した特徴点は互いに連結される。もし、ロボット掃除機1が撮影した映像350から、あらかじめ定義された特徴点の組み合わせを発見すると、ロボット掃除機1の位置及び方向角が把握できる。一方、上述した特徴点を抽出するアルゴリズムとしては、SIFT(Scale Invariant Feature Transform)、デスクリプタ(Descriptor)、ハリスコーナー検出(Harris Corner Detector)が知られている。当然ながら、特徴マップ作成のためには、映像撮影の他、RFID(Radio Frequency Identification)、構造光(structure light)を用いた距離計(Range Finder)などの他のSLAM手法を用いることもできる。ここで、SLAMは、ロボット掃除機1の位置認識及びマップ生成を同時に行うアルゴリズムである。
【0106】
特徴マップ生成部221は、天井映像から得た特徴点と位置認識部63により測定される位置とを対応付けて特徴マップを完成する。特徴マップが完成された後には、撮影された映像から得た特徴点と特徴マップとの比較により、ロボット掃除機1の位置及び方向角が容易に把握できる。
【0107】
記憶部223は、特徴マップ生成部221で生成されたマップを記憶する。記憶部223は、ROM、RAM、PROM、EPROM、フラッシュメモリーのような不揮発性メモリー素子、RAMのような揮発性メモリー素子、ハードディスク、光ディスクのような記憶媒体、または当業界に知られた任意の他の形態とすることができる。
【0108】
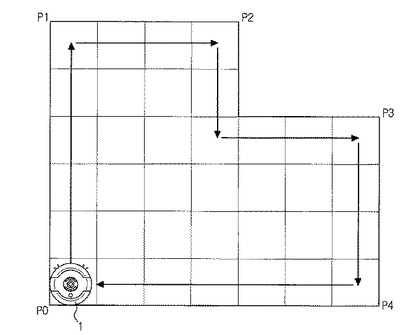
経路マップ生成部222は、ロボット掃除機1の掃除経路マップを生成する。図14を参照すると、経路マップ生成部222は、ロボット掃除機1を壁に沿って移動させることによって掃除区域中の最外側部に関する位置データを記憶し、掃除経路マップを生成することができる。具体的に、経路マップ生成部222は、初期位置「P0」を記憶し、壁に沿って移動しながら移動方向が変わる外側位置P1〜P4に関するデータを記憶し、P0〜P4を最外側掃除経路と設定することができる。経路マップ生成部222は、初期位置P0及び外側位置P1〜P4に基づいて掃除ブロックを分け、掃除ブロックを特定のパターンで走行して掃除できるように掃除経路を生成することができる。ここで、特定のパターンとは、ジグザグ走行経路、壁面追従経路、または渦巻き走行経路のように、定められたパターンのことを意味し、特定のパターンを複数個組み合わせて掃除経路を設定することも可能である。
【0109】
この時、経路マップ生成部222で設定した掃除経路に対応付けてロボット掃除機1の補助掃除ユニット100の動作を設定することができる。図8を共に参照すると、経路マップ生成部で生成した掃除経路が、図8A及び図8Bに示す掃除経路である場合に、掃除領域の最外側部走行に対しては補助掃除ツール110が突出し、掃除領域の内側部走行に対しては補助掃除ツール110が収納されるようにあらかじめ設定することができる。
【0110】
そのため、補助掃除ツール110は、障害物感知部61の感知結果にかかわらず、ロボット掃除機1の走行経路に応じて突出または収納される。
【0111】
また、一実施例に係るロボット掃除機1は、掃除領域の最外側部走行時には掃除領域の内側部走行時に比べて走行速度がより下がるようにすることができる。これは、マップによる走行以外の場合にも可能であり、マップによる走行では、上述の通り、走行経路と共に設定することができる。例えば、壁面追従方式の掃除領域の最外側部走行に対しては、補助掃除ツール110が突出すると同時に、ロボット掃除機1の走行速度が下がる、またはあらかじめ設定された基準値以下になるように設定することができる。こうすると、壁と床とが接する箇所に補助掃除ツール110が留まる時間が長くなり、隅まできれいに掃除することができる。
【0112】
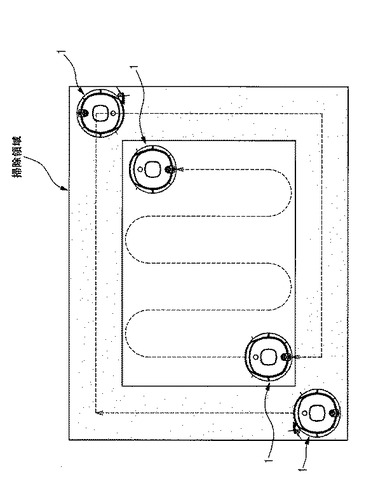
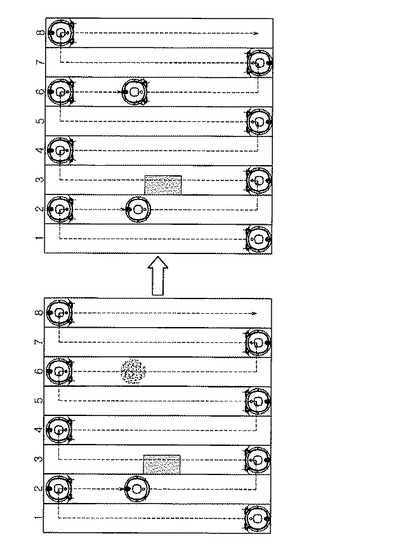
図15は、一実施例に係るロボット掃除機1が走行中にホコリ過多区域を通過する時における動作を示す図である。
【0113】
一実施例に係るロボット掃除機1の感知部60は、ホコリの量を感知するホコリ感知部をさらに有することができる。ホコリ感知部は、光を発する発光部と、発せられた光を受信する受光部と、が相対する形でホコリ流入口33に装着されてなり、ホコリの量によって受光部に受信される光の量が変わり、よって、ホコリ感知部の出力信号を分析することでホコリの量を把握することができる。
【0114】
図15に示すように、ロボット掃除機1が走行中にホコリ過多領域を通るようになると、補助掃除ツール110の突出・収納動作が一定の周期で反復される。具体的に、ホコリ感知部の感知結果が制御部200に伝送され、この該感知結果を掃除制御部210で分析した結果、ホコリの量が、あらかじめ設定された基準値以上と判断されると、補助掃除ツール110の突出・収納動作が一定周期で反復されるように制御する。あらかじめ設定された基準値は、使用者または設計者があらかじめ設定するもので、実験または統計などに基づいて、通常の掃除モードではきれいに掃除できないホコリの量とすることができる。
【0115】
補助掃除ツール110の突出・収納動作が反復される一定周期も、使用者または設計者が設定できるもので、短くするほど掃除の効率性が向上する。
この実施例のように、ホコリ過多領域で補助掃除ツール110が突出・収納動作を反復するようにすると、使用者にホコリ過多領域を知らせると同時に、ホコリを効率的に掃き集めたり分散させたりできる。
【0116】
以下、一実施例に係るロボット掃除機1の動作について説明する。
【0117】
ロボット掃除機1による掃除時に、使用者は、壁または障害物と床とが接する部分などの隅まで丁寧に掃除することを希望する場合もあり、掃除領域の全区域を短時間で掃除することを希望する場合もある。
【0118】
また、掃除領域に障害物または壁が多い場合には、それらに接触する度に補助掃除ツール110を突出させて隅部を掃除するよりは、補助掃除ツール110を収納したまま速やかに通過する方が効率的である場合もある。
【0119】
従って、一実施例に係るロボット掃除機1は、掃除モードを第1掃除モードと第2掃除モードとに分け、使用者の命令または掃除領域の環境に応じて異なる掃除モードで掃除を行うこともできる。
【0120】
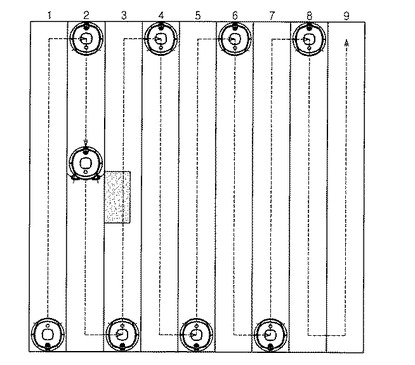
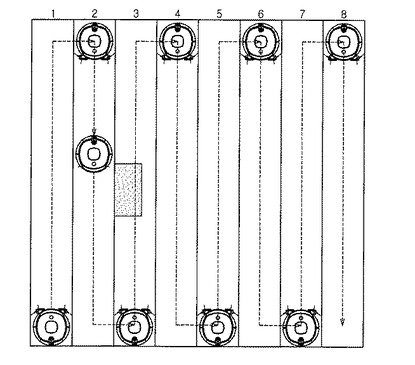
図16は、第1掃除モードで掃除動作を行うロボット掃除機1の動作を、図17は、第2掃除モードで掃除動作を行うロボット掃除機1の動作を、上から見た平面図である。
【0121】
図16を参照すると、掃除モードが第1掃除モードに設定されており、ロボット掃除機1の基本走行パターンをジグザグ方式にした場合に、ロボット掃除機1が障害物に接触するまでは補助掃除ツール110を収納した状態で走行し、障害物に接触すると補助掃除ツール110を突出させて、障害物と床とが接する隅部分を掃除する。この時、走行制御部220がロボット掃除機1の走行速度を減少させ、より丁寧に掃除を行うようにしてもよい。障害物を通過すると、再び補助掃除ツール110を収めると共に、ロボット掃除機1の走行速度を減少させた場合には走行速度を上げる。
【0122】
図17を参照すると、掃除モードが第2掃除モードに設定されており、ロボット掃除機1の基本走行パターンをジグザグ方式にした場合に、ロボット掃除機1が障害物に接触するまでは補助掃除ツール110を突出させた状態で走行し、障害物に接触すると補助掃除ツール110を収納させ、隅部分の掃除をすること無く速やかに障害物を通過する。障害物を通過すると、再び補助掃除ツール110を突出させる。
【0123】
ロボット掃除機1が経路マップに基づいて走行する場合に、掃除機本体の大きさを考慮して走行経路の幅を設定することで掃除が完璧に行われるようにすることができる。図16及び図17を共に参照すると、第1掃除モードで掃除を行う場合には、補助掃除ツール110を収納させた状態での掃除可能領域が考慮されるので、走行経路の幅が狭く設定され、第2掃除モードで掃除を行う場合には、補助掃除ツール110を突出させた状態での掃除可能領域が考慮されるので、走行経路の幅が広く設定される。
【0124】
そのため、同じ領域を掃除する場合にも、第1掃除モードでは9個のラインに沿って走行し、第2掃除モードでは8個のラインに沿って走行し、よって、第2掃除モードにおいてより速やかに掃除を完了できる。また、第2掃除モードでは、障害物のない領域で補助掃除ツール110を突出させるので、障害物のない領域をよりきれいに掃除することができる。
【0125】
一方、第1掃除モードでは障害物の隅部分まで掃除することができる。よって、使用者は、好みによって第1掃除モードまたは第2掃除モードを入力部70を介して選択し、所望の掃除を行うことができる。
【0126】
また、ロボット掃除機1を自律掃除モードに設定することも可能である。ロボット掃除機1が周辺映像を撮影するために掃除領域を試験走行しながら、掃除領域に存在する障害物を感知部60で感知し、掃除制御部210で障害物の個数をカウントし、障害物の個数が、あらかじめ設定された基準値以上であれば第2掃除モードに、あらかじめ設定された基準値未満であれば第1掃除モードに設定することができる。
【0127】
あらかじめ設定された基準値は、設計者が実験または統計に基づいて掃除の効率性を考慮して設定することもでき、使用者が設定または変更することもできる。
【0128】
図16及び図17の実施例では、ロボット掃除機1が掃除領域全体をジグザグパターンで走行するとしたが、ジグザグパターンに限定されず、いずれの走行パターンも適用可能である。なお、この実施例を、図8A及び図8Bの実施例において掃除領域の内側部を走行する場合にも適用可能である。
【0129】
また、図8A及び図8Bの実施例と同様に、図16及び図17の実施例も、走行経路がマップによって定められる場合にも、定められない場合にも適用可能である。
【0130】
また、図16及び図17の実施例では、ロボット掃除機1が第1掃除モード及び第2掃除モードで掃除を行うとしたが、ロボット掃除機1の掃除時に補助掃除ツール110が突出されない第3掃除モードでの掃除も可能である。
【0131】
第3掃除モードも同様に、使用者が入力部70を介して選択してもよく、または、感知部60があらかじめ掃除領域に存在する障害物を感知し、制御部200が障害物の個数を算出し、算出された障害物の個数があらかじめ設定された基準値以下の場合に第3掃除モードと設定してもよい。後者は、掃除領域に障害物が多く存在せず、補助掃除ツール110を突出させなくとも十分に掃除できるという点に着目したものである。他の場合としては、算出された障害物の個数があらかじめ設定された基準値以上の場合に第3掃除モードと設定することができる。これは、掃除領域に存在する障害物が多すぎると、補助掃除ツール110を突出及び収容させる動作があまりにも頻繁に反復され、掃除速度の低下や電力の浪費につながるという点に着目したものである。図16及び図17の実施例は、上記2つの場合を含むことができる。
【0132】
また、本発明の実施例は、第1掃除モード、第2掃除モード及び第3掃除モードを全て含むこともでき、その一部のみを含むこともできる。
【0133】
図16及び図17の実施例にも、図8A及び図8Bの実施例と同様に、ホコリ過多領域での補助掃除ツール110の突出・収納動作の反復を適用することができる。
【0134】
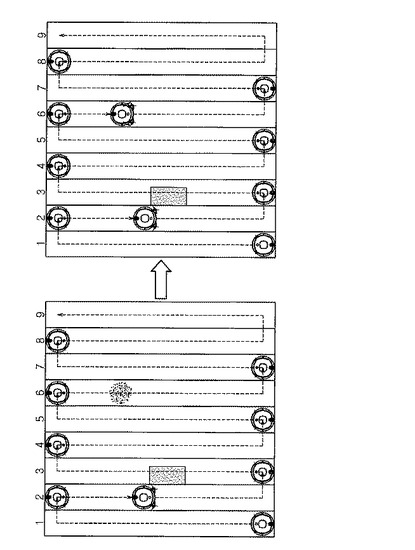
図18A及び図18Bは、図16及び図17の実施例に係るロボット掃除機1がホコリ過多領域を通過する場合の動作を、上から見た平面図である。
【0135】
図18A及び図18Bを参照すると、第1掃除モードで掃除する場合も、第2掃除モードで掃除する場合も、走行経路上にホコリ過多領域が存在すると、ロボット掃除機1がホコリ過多領域を走行する間に、補助掃除ツール110の突出・収納を一定周期で反復することで、過多なホコリを効率的に掃き集めたり分散させたりでき、かつ使用者にホコリ過多領域を知らせることができる。上述したように、掃除制御部210は、ホコリ感知部で感知したホコリの量が、あらかじめ設定された基準値以上であると、補助掃除ツール110の突出・収納を反復するように制御することができる。
【0136】
以下、一実施例に係るロボット掃除機1の制御方法について説明する。
【0137】
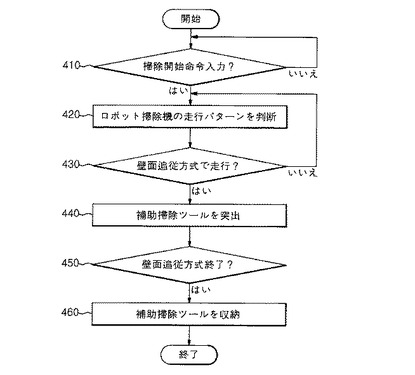
図19は、図8A及び図8Bの実施例に係るロボット掃除機1の制御方法を示すフローチャートである。
【0138】
図19を参照すると、まず、掃除開始命令が入力されたか否かを判断し(410)、掃除開始命令が入力された場合は(410の「はい」)、ロボット掃除機1の走行パターンを判断する(420)。「壁面追従方式で走行中」というのは、掃除領域の最外側部に沿って走行していることを意味する。
【0139】
420での判断の結果、ロボット掃除機1が壁面追従方式で走行中である場合は(430の「はい」)、補助掃除ツール110をロボット掃除機1本体の外側に突出させる(440)。これにより、壁面と床とが接する隅部まで補助掃除ツール110が届き、丁寧に掃除を行うことができる。
【0140】
この時、ロボット掃除機1の両側に存在する補助掃除ツール110を全て突出させることもでき、壁面側の補助掃除ツール110のみを突出させることもできる。
【0141】
また、ロボット掃除機1が壁面追従方式で走行中の場合には、走行速度を相対的に低く制御することも可能である。ここで、「相対的」というのは、ロボット掃除機1の基本走行速度に設定された速度、または他の走行パターンで走行する場合の走行速度に比べてより低い速度を意味する。速度を低くすると、補助掃除ツール110が隅部に留まる時間が長くなり、より丁寧に掃除を行うことが可能になる。
【0142】
次に、壁面追従方式の走行が終了したか否かを判断する(450の「はい」)。判断の結果、壁面追従方式の走行が終了していないと、補助掃除ツール110が突出された状態を維持する。一方、終了した場合は、補助掃除ツール110を収める(460)。
【0143】
上記の実施例では、ロボット掃除機1の走行パターンとしては、壁面追従方式の他、ジグザグ方式、ランダム方式などを含むこともでき、ロボット掃除機1の走行は、経路マップを用いたものでもよく、経路マップを用いないものでもよい。
【0144】
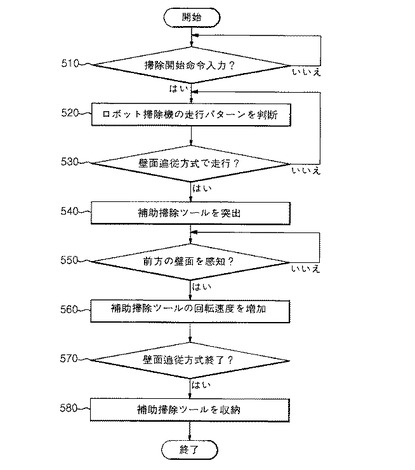
図20は、図8A及び図8Bの実施例に係るロボット掃除機1が壁面追従方式で走行しながら壁に対面する場合の制御方法を示すフローチャートである。
【0145】
掃除開始命令が入力されたか否かを判断する段階(510)から補助掃除ツール110を突出させる段階(540)までは図19と同様であり、その説明は省略する。
【0146】
壁面追従方式で走行中にロボット掃除機1の前方に壁面が存在することを感知すると(550の「はい」)、補助掃除ツール110の回転速度を上げる(560)。これで、壁面と壁面とが接する隅部を速やかに掃除することができる。
【0147】
その後、壁面追従方式が終了すると(570の「はい」)、補助掃除ツール110を収める(580)。
【0148】
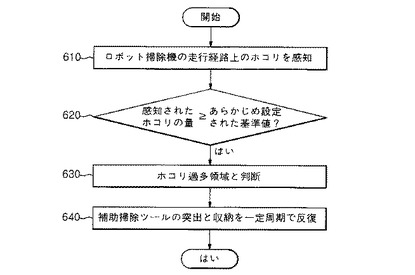
図21は、図8A及び図8Bの実施例に係るロボット掃除機1がホコリ過多領域を通過する場合の制御方法を示すフローチャートである。
【0149】
ロボット掃除機1の走行経路上に存在するホコリを感知する(610)。これは、ロボット掃除機1のいかなる走行経路または掃除モードにも適用可能である。ホコリの感知は、ホコリ流入口33に設けられたホコリ感知部で行われる。
【0150】
感知されたホコリの量が、あらかじめ設定された基準値以上であるか否を判断する(620)。ホコリの量は、ホコリ感知部の受光部に受信された光の量により判断でき、あらかじめ設定された基準値は、設計者または使用者が実験または統計などに基づいて設定できる。
【0151】
判断の結果、感知されたホコリの量があらかじめ設定された基準値以上であると(620の「はい」)、ホコリ過多領域であると判断し(630)、補助掃除ツール110の突出及び収納を一定周期で反復する(640)。これで、ホコリを効果的に掃き集めたり、分散させたり、拭いたりでき、かつ、ホコリの多い領域である旨を使用者に知らせることができる。
【0152】
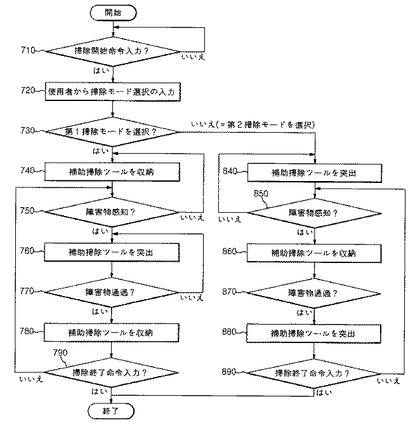
図22は、図16及び図17の実施例に係るロボット掃除機の制御方法を示すフローチャートである。
【0153】
この実施例に係るロボット掃除機の制御方法は、使用者の命令または障害物感知結果に基づいて第1掃除モードまたは第2掃除モードが設定されるが、図22では、使用者の命令に基づいて掃除モードが設定されるとして説明する。
【0154】
図22を参照すると、まず、掃除開始命令が入力されたか否かを判断し(710)、掃除開始命令が入力された場合は(710の「はい」)、使用者から掃除モード選択について入力される(720)。
【0155】
使用者が第1掃除モードを選択すると(730の「はい」)、補助掃除ツール110を収める(740)。そして、あらかじめ設定された走行パターンまたはランダム方式で走行しつつ、ロボット掃除機1の周辺に障害物があるか否か判断する(750)。ここで、障害物は、ロボット掃除機1の前方に存在するものでもよく、側方に存在するものでもよい。
【0156】
ロボット掃除機1の周辺に障害物があると判断された場合は(750の「はい」)、補助掃除ユニットを突出させる(760)。これで、障害物と床面とが接する隅部分まで丁寧に掃除することができる。
【0157】
その後、ロボット掃除機1が障害物を通過すると(770の「はい」)、補助掃除ツール110を再び収納する(780)。
【0158】
掃除終了命令が入力されていないと(790の「いいえ」)、再び、障害物が感知されたか否かを判断し(750)、それ以降の過程を反復する。
【0159】
一方、使用者が第2掃除モードを選択した場合は(730の「いいえ」)、補助掃除ツール110を突出させる(840)。突出された補助掃除ツール110は、隅部分以外の、掃除領域の広い部分を掃除する。
【0160】
ロボット掃除機1の周辺に障害物があると判断された場合は(850の「はい」)、補助掃除ツール110を再び収納する(860)。これにより、掃除領域全体を速やかに掃除することができる。
【0161】
障害物を通過すると(870の「はい」)、補助掃除ツール110を再び突出させる(880)。そして、掃除終了命令が入力されないと(890の「いいえ」)、再び、走行中に障害物が感知されたか否かを判断し(840)、それ以降の動作を反復する。
【0162】
障害物感知結果に基づいて掃除モードを設定する場合には、マップ設定のためのロボット掃除機1の試験走行中に掃除領域内の障害物を感知し、該感知結果に基づいて障害物の個数を算出する。算出された障害物の個数が、あらかじめ設定された基準値以上であれば、障害物の隅の掃除は行わず、掃除領域全体の掃除を行う第2掃除モードに設定し、図22に示すような第2掃除モードに従って掃除を制御する。
【0163】
算出された障害物の個数が、あらかじめ設定された基準値未満であれば、障害物の隅の掃除を行う第1掃除モードに設定し、図22に示すような第1掃除モードに従って掃除を制御する。
【0164】
また、図21でも述べたように、ホコリ過多領域でのロボット掃除機の制御は、いかなる走行経路または掃除モードにも適用できるため、第2実施例のロボット掃除機制御方法にも適用可能である。したがって、第1掃除モードまたは第2掃除モードに従って走行しつつホコリ感知部が走行経路上のホコリを感知し、感知されたホコリの量が、あらかじめ設定された基準値以上であると、補助掃除ツール110の突出及び収納を一定周期で反復させることで、ホコリを効果的に除去すると同時に、ホコリ過多領域を使用者に知らせることができる。
【0165】
以上の実施例では、補助掃除ツール110をブラシ形態とし、補助掃除ツール110がホコリなどの異物を掃き集めたり分散させたりして掃除を行う例をとって説明したが、補助掃除ツール110を雑巾の形態とし、雑巾で異物を拭いて掃除を行うこともでき、補助掃除ツール110を吸込み器の形態とし、異物を吸い込むことによって掃除を行うこともできる。補助掃除ツール110の種類や掃除方法は特に制限されず、様々な実施例が可能である。
【符号の説明】
【0166】
60 感知部
70 入力部
200 制御部
20 メインブラシユニット
100 補助掃除ユニット
40 走行ユニット
【技術分野】
【0001】
本発明は、補助掃除ツールを備えて効率的な掃除動作を行うロボット掃除機及びその制御方法に関する。
【背景技術】
【0002】
ロボット掃除機は、使用者の操作なく、掃除領域を自律走行しながら床面からホコリなどの異物を除去することで当該領域を自動で掃除する。
【0003】
ロボット掃除機は、各種のセンサーなどを用いて、掃除領域内に位置している障害物または壁を感知し、感知結果に基づいてロボット掃除機の走行経路及び掃除動作を制御する。
【0004】
ロボット掃除機は、あらかじめ設定された走行パターンに従って走行しながら掃除作業を反復して行うが、掃除領域に障害物や壁が存在している場合には、障害物または壁と床とが接する箇所まではメインブラシが届きにくく、丁寧に掃除することが困難である。
【0005】
そこで、ロボット掃除機は、ロボット掃除機の外部に突出する補助掃除ツールを有し、このロボット掃除機の補助掃除ツールは、掃除機本体の両側部に装着されて回転しつつ、床上のホコリなどを、掃き集めたり、分散させたり、吸い込んだりなどして除去する。
【0006】
しかしながら、既存のロボット掃除機は、補助掃除ツールの動作がロボット掃除機の走行パターンと連携して制御されず、効率的に掃除動作を行うことが難しいという問題点があった。
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は、ロボット掃除機の走行パターンまたは掃除パターンと補助掃除ツールの突出・収納動作及び掃除動作とを連携して制御することによって、より効率的な掃除動作を行うことができるロボット掃除機及びその制御方法を提供する。
【課題を解決するための手段】
【0008】
一側面に係る、床を走行しつつ該床から異物を除去するロボット掃除機は、前記ロボット掃除機の下部に突出及び収納可能に装着される補助掃除ユニットと、前記ロボット掃除機の掃除領域に位置している障害物を感知する感知部と、掃除領域の最外側部に沿って壁面追従方式で走行しながら前記補助掃除ユニットが突出されるようにし、前記掃除領域の最外側部の走行が完了すると、前記掃除領域の内側部を走行しながら前記補助掃除ユニットが収納されるようにする制御部と、を備える。
【0009】
前記制御部は、前記補助掃除ユニットのうち、前記壁面側の補助掃除ユニットのみ突出されるように制御する。
【0010】
前記制御部は、前記壁面追従方式で走行する場合における走行速度を、前記掃除領域の内側部を走行する場合における走行速度よりも低く制御する。
【0011】
前記感知部は、前記掃除領域に位置している障害物を感知し、かつ超音波センサー、近接センサー及び光センサーのいずれか一つ以上からなる障害物感知部と、前記掃除領域の床に存在するホコリを感知し、かつ光センサーからなるホコリ感知部と、を備える。
【0012】
前記制御部は、前記感知部が、前記ロボット掃除機の壁面追従方式による走行中に前方に位置する壁を感知した場合に、前記補助掃除ユニットの掃除速度を上げる。
【0013】
前記制御部は、前記ホコリ感知部で感知したホコリの量が、あらかじめ設定された基準値以上であると、前記補助掃除ユニットの突出及び収納を一定周期で反復する。
【0014】
他の側面に係る、床を走行しつつ該床から異物を除去するロボット掃除機は、前記ロボット掃除機の下部に突出及び収納可能に装着される補助掃除ユニットと、前記ロボット掃除機の掃除領域に位置している障害物またはホコリを感知する感知部と、使用者の命令または前記感知部の感知結果に基づいて第1掃除モードまたは第2掃除モードを設定する制御部と、を備え、ここで、前記第1掃除モードは、前記感知部が障害物を感知した場合に、前記補助掃除ユニットを突出させて、前記障害物と床とが接する箇所まで掃除する掃除モードとし、前記第2掃除モードは、前記感知部が障害物を感知した場合に、前記補助掃除ユニットを突出させないで速やかに掃除する掃除モードとすることができる。
【0015】
前記感知部は、前記掃除領域に位置している障害物を感知し、且つ超音波センサー、光センサー及び近接センサーのいずれか一つ以上からなる障害物感知部と、前記掃除領域の床に存在するホコリを感知し、且つ光センサーからなるホコリ感知部と、を有する。
【0016】
前記第2掃除モードは、前記感知部が障害物を感知するまで前記補助掃除ユニットを突出させる。
【0017】
前記ロボット掃除機は、使用者から掃除モードの選択命令が入力される入力部をさらに備え、前記制御部は、前記入力部を介して選択された掃除モードに従って前記ロボット掃除機の掃除動作を制御する。
【0018】
前記制御部は、掃除開始命令が入力されると、前記ロボット掃除機が掃除を行う掃除領域に存在している障害物の個数を把握するために試験走行をするように制御し、前記感知部は、前記試験走行中に前記掃除領域に存在する障害物を感知し、その結果を前記制御部に伝送する。
【0019】
前記制御部は、前記感知部の感知結果に基づいて前記掃除領域に存在している障害物の個数を算出し、前記算出された障害物の個数が、あらかじめ設定された基準値以上である場合には、第2掃除モードに従って掃除動作を制御し、前記算出された障害物の個数が、あらかじめ設定された基準値未満である場合には、第1掃除モードに従って掃除動作を制御する。
【0020】
前記制御部は、前記ホコリ感知部で感知したホコリの量が、あらかじめ設定された基準値以上であると、前記補助掃除ユニットの突出と収納を一定周期で反復する。
【0021】
他の側面に係る、突出及び収納可能に装着される補助掃除ユニットを有するロボット掃除機の制御方法は、掃除開始命令が入力されると、前記ロボット掃除機が壁面追従方式で走行するか否かを判断し、前記ロボット掃除機が壁面追従方式で走行すると、前記補助掃除ユニットを前記ロボット掃除機の外部に突出させ、前記ロボット掃除機の壁面追従方式の走行が終了したか否かを判断し、前記壁面追従方式の走行が終了すると、前記補助掃除ユニットを収納させる。
【0022】
前記壁面追従方式による走行時に、前記補助掃除ユニットのうち、前記壁面側の補助掃除ユニットのみを突出させる。
【0023】
前記壁面追従方式による走行時の前記ロボット掃除機の走行速度を、前記壁面追従方式以外の走行時の前記ロボット掃除機の走行速度よりも低く制御する。
【0024】
さらに、前記ロボット掃除機の前方に存在する障害物を感知し、前記壁面追従方式で走行中に前方に壁面が存在することを感知すると、前記補助掃除ユニットの掃除速度を上げる。
【0025】
さらに、前記ロボット掃除機の走行経路上のホコリを感知し、前記感知されたホコリの量が、あらかじめ設定された基準値以上であると、前記補助掃除ユニットの突出と収納を一定周期で反復させる。
【0026】
さらに他の側面に係る、突出及び収納可能に装着される補助掃除ユニットを有するロボット掃除機の制御方法は、使用者の命令または障害物の感知結果に基づいて第1掃除モードまたは第2掃除モードを設定し、前記第1掃除モードでは、前記ロボット掃除機が掃除を行う掃除領域から障害物が感知されると前記補助掃除ユニットを突出させ、前記障害物と床とが接する箇所まで掃除を行い、前記第2掃除モードでは、前記掃除領域から障害物が感知されると、前記補助掃除ユニットを突出させないで速やかに掃除を行う。
【0027】
前記第2掃除モードにおいて、前記掃除領域から障害物が感知されるまで前記補助掃除ユニットを突出させる。
【0028】
さらに、前記ロボット掃除機の掃除領域に存在する障害物を感知し、前記感知結果に基づいて前記障害物の個数を算出し、該算出された障害物の個数が、あらかじめ設定された基準値以上であると、第2掃除モードに従って前記ロボット掃除機の掃除動作を制御する。
【0029】
前記ロボット掃除機の走行経路上のホコリを感知し、前記感知されたホコリの量があらかじめ設定された基準値以上であると、前記補助掃除ユニットの突出及び収納を一定周期で反復させる。
【発明の効果】
【0030】
本発明のロボット掃除機及びその制御方法によれば、壁面追従方式による走行時には補助掃除ツールを突出させることによって、障害物または壁と床とが接する地点や壁面同士が接する地点のような、メインブラシの届かない箇所を効果的に掃除すると同時に、掃除領域の内側部の走行時には補助掃除ツールを収納させることによって掃除の効率を向上させることが可能になる。
【0031】
なお、一側面に係るロボット掃除機及びその制御方法によれば、使用者の命令または掃除領域の環境に応じて補助掃除ツールの突出、収納を制御することによって、使用者の要求または掃除領域の環境に適した掃除を行うことが可能になる。
【図面の簡単な説明】
【0032】
【図1】一実施例に係るロボット掃除機の斜視図である。
【図2】一実施例に係るロボット掃除機の下面図である。
【図3】各補助掃除ユニットの突出及び収納を可能にする構造に関する一実施例を概略的に示す図である。
【図4】各補助掃除ユニットの突出及び収納を可能にする構造に関する他の実施例を概略的に示す図である。
【図5】一実施例に係る補助掃除ツールの構成を概略的に示す図である。
【図6】他の実施例に係る補助掃除ツールの構成を概略的に示す図である。
【図7】一実施例に係るロボット掃除機の制御ブロック図である。
【図8A】一実施例に係るロボット掃除機の走行及び掃除動作を上から見た全体構成図である。
【図8B】一実施例に係るロボット掃除機の走行及び掃除動作を上から見た全体構成図である。
【図9】壁と壁とが接する地点におけるロボット掃除機を示す図である。
【図10】図8A及び図8Bに示すロボット掃除機において、壁面側の補助掃除ツールのみを突出させた場合を示す図である。
【図11】一実施例に係るロボット掃除機における走行制御部の具体的な制御ブロック図である。
【図12】一実施例に係るロボット掃除機により撮影された映像である。
【図13】実際に作成された特徴マップの例を示す断面図である。
【図14】実際に作成された経路マップを示す図である。
【図15】図8A及び図8Bにおけるロボット掃除機がホコリ過多領域を走行する時の動作を示す図である。
【図16】第1掃除モードで掃除動作を行う場合におけるロボット掃除機の動作を、上から見た平面図である。
【図17】第2掃除モードで掃除動作を行う場合におけるロボット掃除機の動作を、上から見た平面図である。
【図18A】一実施例に係るロボット掃除機がホコリ過多領域を走行する時の動作を、上から見た平面図である。
【図18B】一実施例に係るロボット掃除機がホコリ過多領域を走行する時の動作を、上から見た平面図である。
【図19】図8A及び図8Bに示すロボット掃除機の制御方法を示すフローチャートである。
【図20】図8A及び図8Bに示すロボット掃除機が壁面追従方式による走行中に壁に対面する時における制御方法を示すフローチャートである。
【図21】図8A及び図8Bに示すロボット掃除機がホコリ過多領域を走行する時における制御方法を簡略に示すフローチャートである。
【図22】図16及び図17に示すロボット掃除機の制御方法を示すフローチャートである。
【発明を実施するための形態】
【0033】
以下、添付の図面を参照して、本発明の実施例を詳細に説明する。
【0034】
図1及び図2を参照すると、ロボット掃除機1は、外観を形成する本体10と、床上のホコリを掃いて吸込み口へ導くメインブラシユニット30と、本体10を駆動させるための駆動電源を供給する電源部50と、本体10を走らせる駆動輪41,42及びキャスター43と、壁面との隣接部及び隅部を掃除するための補助掃除ユニット100a,100bと、で構成される。
【0035】
駆動輪41,42は、本体10の下部において中央領域の左右端部に対称に2つが配置される。駆動輪41,42は、ロボット掃除機1が掃除を行いつつ前進、後進及び回転走行などの移動動作を行えるようにする。
【0036】
走行方向を基準に本体10の下部の前方端部にキャスター43が取り付けられる。該キャスター43は、ロボット掃除機1が移動する床の状態に応じて回転角度が変化し、本体10が安定した姿勢を維持できるようにする。駆動輪41,42とキャスター43とを一つのアセンブリーにし、本体10に着脱可能に装着することができる。
【0037】
電源部50は、本体10、及び本体10に装着された各種の部品を駆動させる各駆動装置と電気的に連結されて駆動電源を供給するバッテリーを含む。バッテリーは、再充電可能な2次バッテリーとし、本体10が掃除過程を完了してドッキングステーション(図示せず)に結合すると、ドッキングステーション(図示せず)から供給される電力で充電する。
【0038】
メインブラシユニット30は、本体10の下部において中央領域から後方Rへ偏った部分に形成された開口に装着される。
【0039】
メインブラシユニット30は、本体10が置かれている床に積もったホコリなどの異物を掃除する。メインブラシユニット30が装着される本体10の下部における開口は、ホコリ流入口33となる。
【0040】
メインブラシユニット30は、ローラ31と、ローラ31の外面に形成されているメインブラシ32と、で構成される。ローラ31の回転と共に、メインブラシ32は、床に積ったホコリをかき回してホコリ流入口33に導く。ローラ31は、鋼体とすることができるが、これに限定されるものではない。メインブラシ32は、弾性力を有する様々な材質とすることができる。
【0041】
図示してはいないが、ホコリ流入口33の内部には、吸入力を発生させる送風装置が設けられて、ホコリ流入口33に流入したホコリを集塵装置55へと移動させる。
【0042】
本体10には、ロボット掃除機1の周囲環境を感知できる感知部60が装着される。感知部60は、近接センサー61及び/またはビジョンセンサー62を有してなることができる。例えば、定められた経路無しでロボット掃除機1が任意の方向に走行する場合、すなわち、マップのない掃除システムにおいて、ロボット掃除機1は近接センサー61を用いて掃除領域を走行することが可能である。一方、定められた経路に従ってロボット掃除機1が走行する場合、すなわち、マップを必要とする掃除システムでは、ロボット掃除機1の位置情報を取り込んでマップを生成するためのビジョンセンサー62を装着することができる。感知部60は、上記に限定されるものではなく、多様な方式で具現可能である。
【0043】
ディスプレイ部65は、ロボット掃除機1の各種状態を示すことができる。例えば、バッテリーの充電状態、集塵装置55がホコリで満ちているか否か、ロボット掃除機1の掃除モード、休眠モードなどを示すことができる。
【0044】
また、図示してはいないが、一実施例に係るロボット掃除機1は入力部を備え、使用者からの走行モード、掃除モードまたは電源on/offなどに関する命令を受信することができる。
【0045】
以下、図3乃至図6を参照して、図示の実施例に係るロボット掃除機に備えられる補助掃除ユニット100a,100bの構成及び構造について説明する。
【0046】
補助掃除ユニット100a,100bは、ロボット掃除機の下部に突出及び収納可能に装着される。補助掃除ユニット100a,100bの突出及び収納を可能にする構造には様々な実施例があり、以下では、その2つの実施例について説明する。
【0047】
図3は、各補助掃除ユニットを突出及び収納可能にする構造に関する実施例を概略的に示す図である。左右の補助掃除ユニットの基本的な構造は同一でよいため、以下では、左側の補助掃除ユニット100bと右側の補助掃除ユニット100aとを区別することなく補助掃除ユニット100と総称して説明する。
【0048】
図3を参照すると、補助掃除ユニット100は、サイドアーム102及び縁カバー103を備える。
【0049】
本体10の前方一側の下部にはサイドアーム102が結合され、その上側には、サイドアーム102を駆動させるアームモーター(図示せず)が収容される。アームモーターは、サイドアーム102に駆動力を伝達する所定のギアを介して回転軸(図示せず)と連結され、この回転軸が、サイドアーム102の一端に形成された結合溝101に装着される。
【0050】
そのため、アームモーターが駆動すると、回転軸が回転しつつサイドアーム102は結合溝101を基準に揺動する。この時、サイドアーム102が本体10の外側に揺動するとともに、縁カバー103は、本体10の開口をそれ以上覆わず、本体10の周縁を形成しなくなる。
【0051】
サイドアーム102の他端には、補助掃除ツールが結合される結合溝104が形成される。その上側には、補助掃除ツールを駆動させる回転モーター(図示せず)が収容され、該回転モーターの駆動力によって補助掃除ツールが結合溝104を基準に回転することとなる。
【0052】
図4も、各補助掃除ユニットを突出及び収納可能にする構造に関する実施例を概略的に示す図である。
【0053】
図4を参照すると、補助掃除ユニット100は、サイドアーム106、及び縁カバー108を備える。
【0054】
本体10の前方一側の下部には、サイドアーム106が結合溝105に沿って結合され、サイドアーム106の内部には、サイドアーム106の外部へスライドして伸びる延長アーム107が収容される。
【0055】
延長アーム107は、サイドアーム106の内部でサイドアーム106の長手方向に沿って前後に移動する。そのために、サイドアーム106の内部にはレールが設けられ、延長アーム107にはガイド(図示せず)が設けられ、延長アーム107はレールに固定されたままレールに沿って滑動することができる。また、延長アーム107の内部には、延長アーム107の外部へスライドして突出する他の延長アームが収容されてもよい。他の延長アームも延長アーム107と同様の方式で移動すればよく、延長アームの数は制限されない。
【0056】
そして、サイドアーム106の上側には、延長アーム107を駆動させるアームモーター(図示せず)が収容される。アームモーターは、所定のギアを介して延長アーム107に駆動力を伝達し、アームモーターが駆動すると延長アーム107がサイドアーム106の外部にスライドしつつ本体10の外側へ突出する。この時、縁カバー108は、本体10の開口をそれ以上覆わず、本体10の周縁を形成しなくなる。
【0057】
そして、延長アーム107の先端には、補助掃除ツールが結合される結合溝109が形成される。その上側には、補助掃除ツールを駆動させる回転モーター(図示せず)が収容され、該回転モーターの駆動力によって補助掃除ツールが結合溝109を基準に回転する。
【0058】
補助掃除ユニットは、補助掃除ツールを有し、補助掃除ツールにより掃除を行う。補助掃除ツールは、ホコリなどの異物を掃き集めたり分散させたりするブラシを有することもでき、床を拭く雑巾を有することもでき、ホコリなどの異物を吸い込む吸込み器を有することもできる。ただし、これらの補助掃除ツールは例示に過ぎず、補助的に掃除を行えるものであれば、いかなる種類の補助掃除ツールも可能である。
【0059】
図5は、一実施例に係る補助掃除ツールの構成を概略的に示す図である。
図5を参照すると、補助掃除ツール110は、中央の共通端部から半径方向外側に延在すると共に、周方向に互いに離れて配置されるブラシアーム113を備える。ブラシアーム113には補助ブラシ112が結合され、ブラシアーム113の中央の共通端部から突出した回転軸114が、結合溝を通ってサイドアーム102、または延長アーム107と結合される。補助掃除ツール110が回転すると、補助ブラシ112が壁面との隣接部などに積もったホコリを、本体10の中央領域に掃き集めたり、分散させたりする。
【0060】
図6は、一実施例に係る補助掃除ツールの構成を概略的に示す図である。
【0061】
図6を参照すると、補助掃除ツール110は、円形の雑巾ホルダー116を有し、該雑巾ホルダー116には、雑巾ホルダー116の周方向に補助雑巾115が装着される。雑巾ホルダー116の中心には、回転モーターの駆動力が伝達されて補助掃除ツール110を回転させる回転軸114が突設され、この回転軸114が結合溝を通ってサイドアーム102、または延長アーム107と結合される。補助掃除ツール110が回転すると、補助雑巾115が壁面との隣接部などを拭くこととなる。
【0062】
図6の実施例が図4の実施例と共に適用される場合に、補助掃除ユニット100の掃除動作は、補助掃除ツール110の回転と、延長アーム107の突出及び収納の反復と、が同時に行われるようにしてもよく、補助掃除ツール110は回転せずに、延長アーム107の突出及び収納の反復のみが行われるようにしてもよい。
【0063】
一方、補助ブラシ112は、弾性の様々な材質とすることができ、補助雑巾115は、繊維材質の他にも、様々な材質とすることができる。
【0064】
図示の実施例に係るロボット掃除機1は、本体10の外側に突出する補助掃除ユニット100a,100bにより、掃除領域が広くなり、壁面との隣接部や床の隅部まで掃除可能になる。
【0065】
図1乃至図6の実施例では、補助掃除ユニット100がロボット掃除機1の両側部に2つ設けられるとしたが、それに限定されるものではなく、補助掃除ユニット100の個数及び装着位置には制限がない。ただし、説明の便宜上、後述する実施例では、補助掃除ユニット100が、図1乃至図6の実施例のように、ロボット掃除機1の両側部に2つ設けられるとする。
【0066】
以下、上述した構成に基づいて、図示の実施例に係るロボット掃除機1の走行及び掃除動作について詳細に説明する。
【0067】
以下に説明する実施例では、ロボット掃除機の走行中には基本的にメインブラシユニットによる掃除がなされるとする。
【0068】
また、上述したように、実施例に適用可能な補助掃除ツール110は、ブラシ、雑巾などの様々な形態とすることができるが、以下の実施例では、説明の便宜上、補助掃除ツール110がブラシ形態であるとして説明する。
【0069】
図7は、一実施例に係るロボット掃除機1の制御ブロック図である。
【0070】
図7を参照すると、図示の実施例に係るロボット掃除機1は、ロボット掃除機1の周辺環境を感知する感知部60と、使用者からロボット掃除機1の走行または掃除動作に関する命令が入力される入力部70と、感知部60の感知結果または入力部70に入力された命令に基づいてロボット掃除機1の走行及び掃除動作を制御する制御部200と、掃除を行うメインブラシユニット30及び補助掃除ユニット100と、ロボット掃除機1の走行を行う走行ユニット40と、を備える。
【0071】
感知部60は、ロボット掃除機1の移動中に近接する障害物を感知する。感知部60は、超音波センサー、光センサーまたは近接センサーとすることができる。超音波センサーとした感知部60は、走行する経路に超音波を発信し、反射される超音波を受信することで障害物を感知することができる。光センサーとした感知部60は、赤外線発光素子が赤外線を発し、赤外線受光素子が、反射された赤外線を受信することで、障害物を感知することができる。その他にも、感知部60は、近接センサー、接触センサーなどとすることもでき、障害物を感知できるいかなる構成にしてもよい。
【0072】
入力部70では、使用者からロボット掃除機1の掃除動作または走行に関する命令が入力される。基本的に、on/off入力によって掃除開始命令または掃除終了命令を入力することができ、走行モード及び掃除モードに関する命令を入力することができる。入力部70は、ロボット掃除機1の本体10に設けられ、ボタン方式で構成されてもよく、ディスプレイ部65にタッチパネル方式で構成されてもよい。
【0073】
制御部200は、ロボット掃除機1の動作全般を制御するもので、大きく、掃除動作を制御する掃除制御部210と、走行を制御する走行制御部220と、を有する。
【0074】
掃除制御部210は、感知部60の感知結果または入力部70から入力された使用者の命令に基づいて設定された掃除モードに従ってメインブラシユニット30及び補助掃除ユニット100を制御する。
【0075】
走行制御部220も同様に、感知部60の感知結果または入力部70から入力された使用者の命令に基づいて走行ユニット40を制御し、ロボット掃除機1の走行方向及び走行速度を制御する。
【0076】
掃除制御部210及び走行制御部220の具体的な動作については後述する。
【0077】
メインブラシユニット30は、上述の通り、ローラ31と、ローラ31の外面に形成されたメインブラシ32と、で構成される。ローラ31が回転すると、メインブラシ32は、床に積もったホコリを掻き回してホコリ流入口33へ導き、主な掃除動作を行う。そのために、掃除制御部210が、ローラ31を駆動させる駆動モーターに制御信号を伝送し、該制御信号に応じてメインブラシ32が掃除動作を行う。
【0078】
補助掃除ユニット100は、メインブラシユニット30だけでは十分に掃除できない隅部を掃除する機能を有する。補助掃除ユニット100は、補助掃除ツール110の突出及び収納動作を行うサイドアーム102,106及び/または延長アーム107と、補助掃除ツール110を回転させる回転モーターと、サイドアーム102,106及び/または延長アーム107を駆動させるアームモーターと、を備える。
【0079】
走行ユニット40は、上述の通り、駆動輪41,42、キャスター43、及びこれらを駆動させる駆動部を備える。そのため、走行制御部220は、駆動部に制御信号を伝送し、駆動輪41,42を前方または後方に駆動させてロボット掃除機1を前方または後方へ移動させることができる。なお、走行制御部220は、左側駆動輪41,42を後方へ移動させつつ右側駆動輪41,42を前方に駆動させることで、ロボット掃除機1を前方を基準に左側方向に回転させたり、これと逆に駆動させることで、ロボット掃除機1を前方を基準に右側方向に回転させたりすることもできる。
【0080】
以下、一実施例に係るロボット掃除機1の動作について説明する。
【0081】
図8A及び図8Bは、一実施例に係るロボット掃除機1の走行及び掃除動作を上から見た全体構成図である。
【0082】
使用者が入力部70を介して掃除開始命令を入力すると、ロボット掃除機1の走行及び掃除動作が始まる。この時、走行制御部220の走行モードは、掃除領域の最外側部に沿って壁面追従方式の走行をした後に、掃除領域の内側部をランダム方式または所定の走行パターンに従って走行するものと設定することができる。
【0083】
図8Aを参照すると、一実施例に係るロボット掃除機1が掃除領域の最外側部を壁面追従方式で走行する時に、床面と壁とが接する部分は、メインブラシユニット30のブラシ32が届かず、完全に掃除することが難しい。なお、床面と壁とが接する部分は、ホコリがより多く積もる箇所であって、丁寧に掃除する必要がある。そのために、ロボット掃除機1は、壁面追従方式で走行する時に補助掃除ユニット100を外部に突出させ、床面と壁とが接する部分を掃除する。
【0084】
図8Bを参照すると、一実施例に係るロボット掃除機1は、掃除領域の最外側部に対する壁面追従方式の走行を終えると、掃除領域の内側部に対する走行を始める。この時、図8Bに示すようにジグザグ上の走行にしてもよいが、その他のパターンの走行またはランダム方式の走行にしてもよい。
【0085】
ここで、掃除領域の内側部は、図8Bに示すように、壁面追従方式の走行によって掃除を完了した領域以外の領域にしてもよく、壁面追従方式の走行によって掃除を完了した領域を含む領域にしてもよいが、前者にすれば、掃除を短時間で完了でき、後者にすれば、掃除をより丁寧に行うことができる。
【0086】
ロボット掃除機1が掃除領域の内側部を走行する時には、突出した補助掃除ツール110を引き込んで収納する。掃除領域の内側部にはメインブラシ32の届かない隅部がないため、補助掃除ユニット100を使用しないでメインブラシユニット30を用いるだけでも十分に掃除ができる。もし、ロボット掃除機1が掃除領域の内側部において障害物に接触すると、補助掃除ツール110が突出して障害物との隅部を掃除するようにしてもよい。
【0087】
また、補助掃除ユニット100を収納した状態で補助掃除ツール110を回転させることもでき、こうすると、ロボット掃除機1が走行しながらメインブラシユニット30の届かない領域が発生する場合に、該領域への掃除を行うことができる。
【0088】
ただし、図8A及び図8Bの走行経路または走行パターンは一実施例に過ぎず、ロボット掃除機1の全体走行経路または走行パターンを問わず、壁面追従方式の走行パターンでは補助掃除ユニット100を突出させ、ジグザグ方式、ランダム方式などのその他の走行時には補助掃除ツール110を収納する実施例も可能である。
【0089】
図9を参照すると、壁と壁とが接する地点は、ロボット掃除機1の構造上、メインブラシ32だけでは十分に掃除しにくく、ホコリもよく積もる箇所である。
【0090】
そのため、ロボット掃除機1が壁面追従方式で走行しながら、掃除領域内の壁と壁とが接する地点に位置するようになると、補助掃除ツール110の回転速度を上げることで、定められた時間内でより効率的な掃除を行うことができる。参考として、補助掃除ユニット100が、図4及び図6の実施例の組み合わせで具現されるとすれば、補助掃除ツール110の掃除速度を上げることによって効率的な掃除を行うことができる。ここで、掃除速度は、延長アーム107の突出及び収納の反復速度を考慮した速度でもよく、補助掃除ツール110の回転速度と延長アーム107の突出及び収納の反復速度との両方を考慮した速度でもよい。
【0091】
そのために、感知部60が障害物感知結果を制御部200に伝送し、掃除制御部210は、該感知結果を分析し、壁面追従方式で走行中のロボット掃除機1の前方に障害物が位置する場合には、補助掃除ツール110の回転速度を上げる旨の制御信号を補助掃除ユニット100に送信する。
【0092】
感知部60として、ロボット掃除機1と隣接した障害物のみを認識できるセンサーを用いる場合には、障害物が存在するという感知結果のみに基づいて補助掃除ツール110の回転速度を上げても構わないが、遠距離の障害物を認識できるセンサーを用いる場合には、壁と壁とが接する地点にロボット掃除機1が位置したと見なし得る十分に短い距離を基準値としてあらかじめ設定し、感知部60の感知結果による障害物とロボット掃除機1との間の距離が上記基準値以下の場合に補助掃除ツール110の回転速度を上げることも可能である。
【0093】
図8Aの実施例では、ロボット掃除機1の両側の補助掃除ツールを突出させているが、図10に示すように、壁面側の補助掃除ツールのみを突出させ、残りの補助掃除ツールは突出させなくてもよい。
【0094】
上述の実施例において、ロボット掃除機1の走行は、あらかじめ設定された経路マップまたは特徴マップに基づくようにしてもよく、マップを使用せずに障害物の有無のみを判断して回転または直進走行をランダムに決定する方式にしてもよい。
【0095】
以下、経路マップまたは特徴マップに基づいて走行する場合の実施例について具体的に説明する。
【0096】
図11は、一実施例に係るロボット掃除機1における走行制御部220の具体的な制御構成を示すブロック図である。
【0097】
一実施例に係るロボット掃除機1は、図7で上述したように、ロボット掃除機1の周辺環境を感知する感知部60、使用者から命令が入力される入力部70、ロボット掃除機1の掃除動作及び走行を制御する制御部200、メインブラシユニット30、補助掃除ユニット100、及び走行ユニット40を備える。
【0098】
感知部60は、障害物を感知する超音波センサー、光センサー、近接センサーなどの障害物感知部61を有することができ、経路マップ生成のために特徴点を抽出するのに適した周辺映像を撮影するビジョンセンサー62をさらに有することができる。周辺映像は、天井、壁面、床を含むことができ、映像変化の可能性の少ない天井が周辺映像として最も好適である。以下、周辺映像として天井を用いる例を挙げて説明する。
【0099】
ビジョンセンサー62には、CCD(Charge Coupled Device)、CMOS(Complementary Metal Oxide Semiconductor)またはその他の映像取得手段を用いることができる。ビジョンセンサー62は、取得した映像のアナログ信号をデジタル信号に変換するADC(Analog−to−Digital Converter)を備えることができる。
【0100】
また、感知部60は、ロボット掃除機1の現在位置を認識できるエンコーダ、ジャイロセンサー、加速度センサーなどの位置認識部63をさらに有することができる。
【0101】
エンコーダは、駆動輪41,42と連結されて回転速度を感知する。エンコーダで感知された回転速度を積分すると、ロボット掃除機1の位置(または、動いた距離)及び方向角がわかる。ジャイロセンサーは、回転慣性を用いてロボット掃除機1の方向角を測定することができる。加速度センサーは、ロボット掃除機1の運動加速度を二重積分してロボット掃除機1の位置を測定することができる。
【0102】
走行制御部220は、ビジョンセンサー62で取得された天井映像から複数の特徴点を抽出して特徴マップを生成する特徴マップ生成部221、ロボット掃除機1の経路マップを生成する経路マップ生成部222、及び生成されたマップを記憶する記憶部223を備える。
【0103】
特徴マップ生成部221は、ビジョンセンサー62で取得された天井映像から複数の特徴点を抽出して特徴マップを生成する。特徴マップは、周辺環境において一定に測定される特徴点からなっている。特徴点は、特定位置固有の特徴が現れる点のことを指す。
【0104】
図12を参照すると、天井映像280には、シャンデリア281、蛍光灯282、隅部分283など、他の位置と区別されるようにする細部映像を含むことがある。それらの細部映像に特徴点を表示した後に、ロボット掃除機1が移動しながら撮影した映像から、表示された特徴点と同じ特徴点を発見すると、ロボット掃除機1のポーズ(位置及び方向角)が把握できる。
【0105】
図13は、実際に作成された特徴マップの例を示す断面である。特徴マップ300には様々な形態の特徴点が含まれ、地理的に隣接した特徴点は互いに連結される。もし、ロボット掃除機1が撮影した映像350から、あらかじめ定義された特徴点の組み合わせを発見すると、ロボット掃除機1の位置及び方向角が把握できる。一方、上述した特徴点を抽出するアルゴリズムとしては、SIFT(Scale Invariant Feature Transform)、デスクリプタ(Descriptor)、ハリスコーナー検出(Harris Corner Detector)が知られている。当然ながら、特徴マップ作成のためには、映像撮影の他、RFID(Radio Frequency Identification)、構造光(structure light)を用いた距離計(Range Finder)などの他のSLAM手法を用いることもできる。ここで、SLAMは、ロボット掃除機1の位置認識及びマップ生成を同時に行うアルゴリズムである。
【0106】
特徴マップ生成部221は、天井映像から得た特徴点と位置認識部63により測定される位置とを対応付けて特徴マップを完成する。特徴マップが完成された後には、撮影された映像から得た特徴点と特徴マップとの比較により、ロボット掃除機1の位置及び方向角が容易に把握できる。
【0107】
記憶部223は、特徴マップ生成部221で生成されたマップを記憶する。記憶部223は、ROM、RAM、PROM、EPROM、フラッシュメモリーのような不揮発性メモリー素子、RAMのような揮発性メモリー素子、ハードディスク、光ディスクのような記憶媒体、または当業界に知られた任意の他の形態とすることができる。
【0108】
経路マップ生成部222は、ロボット掃除機1の掃除経路マップを生成する。図14を参照すると、経路マップ生成部222は、ロボット掃除機1を壁に沿って移動させることによって掃除区域中の最外側部に関する位置データを記憶し、掃除経路マップを生成することができる。具体的に、経路マップ生成部222は、初期位置「P0」を記憶し、壁に沿って移動しながら移動方向が変わる外側位置P1〜P4に関するデータを記憶し、P0〜P4を最外側掃除経路と設定することができる。経路マップ生成部222は、初期位置P0及び外側位置P1〜P4に基づいて掃除ブロックを分け、掃除ブロックを特定のパターンで走行して掃除できるように掃除経路を生成することができる。ここで、特定のパターンとは、ジグザグ走行経路、壁面追従経路、または渦巻き走行経路のように、定められたパターンのことを意味し、特定のパターンを複数個組み合わせて掃除経路を設定することも可能である。
【0109】
この時、経路マップ生成部222で設定した掃除経路に対応付けてロボット掃除機1の補助掃除ユニット100の動作を設定することができる。図8を共に参照すると、経路マップ生成部で生成した掃除経路が、図8A及び図8Bに示す掃除経路である場合に、掃除領域の最外側部走行に対しては補助掃除ツール110が突出し、掃除領域の内側部走行に対しては補助掃除ツール110が収納されるようにあらかじめ設定することができる。
【0110】
そのため、補助掃除ツール110は、障害物感知部61の感知結果にかかわらず、ロボット掃除機1の走行経路に応じて突出または収納される。
【0111】
また、一実施例に係るロボット掃除機1は、掃除領域の最外側部走行時には掃除領域の内側部走行時に比べて走行速度がより下がるようにすることができる。これは、マップによる走行以外の場合にも可能であり、マップによる走行では、上述の通り、走行経路と共に設定することができる。例えば、壁面追従方式の掃除領域の最外側部走行に対しては、補助掃除ツール110が突出すると同時に、ロボット掃除機1の走行速度が下がる、またはあらかじめ設定された基準値以下になるように設定することができる。こうすると、壁と床とが接する箇所に補助掃除ツール110が留まる時間が長くなり、隅まできれいに掃除することができる。
【0112】
図15は、一実施例に係るロボット掃除機1が走行中にホコリ過多区域を通過する時における動作を示す図である。
【0113】
一実施例に係るロボット掃除機1の感知部60は、ホコリの量を感知するホコリ感知部をさらに有することができる。ホコリ感知部は、光を発する発光部と、発せられた光を受信する受光部と、が相対する形でホコリ流入口33に装着されてなり、ホコリの量によって受光部に受信される光の量が変わり、よって、ホコリ感知部の出力信号を分析することでホコリの量を把握することができる。
【0114】
図15に示すように、ロボット掃除機1が走行中にホコリ過多領域を通るようになると、補助掃除ツール110の突出・収納動作が一定の周期で反復される。具体的に、ホコリ感知部の感知結果が制御部200に伝送され、この該感知結果を掃除制御部210で分析した結果、ホコリの量が、あらかじめ設定された基準値以上と判断されると、補助掃除ツール110の突出・収納動作が一定周期で反復されるように制御する。あらかじめ設定された基準値は、使用者または設計者があらかじめ設定するもので、実験または統計などに基づいて、通常の掃除モードではきれいに掃除できないホコリの量とすることができる。
【0115】
補助掃除ツール110の突出・収納動作が反復される一定周期も、使用者または設計者が設定できるもので、短くするほど掃除の効率性が向上する。
この実施例のように、ホコリ過多領域で補助掃除ツール110が突出・収納動作を反復するようにすると、使用者にホコリ過多領域を知らせると同時に、ホコリを効率的に掃き集めたり分散させたりできる。
【0116】
以下、一実施例に係るロボット掃除機1の動作について説明する。
【0117】
ロボット掃除機1による掃除時に、使用者は、壁または障害物と床とが接する部分などの隅まで丁寧に掃除することを希望する場合もあり、掃除領域の全区域を短時間で掃除することを希望する場合もある。
【0118】
また、掃除領域に障害物または壁が多い場合には、それらに接触する度に補助掃除ツール110を突出させて隅部を掃除するよりは、補助掃除ツール110を収納したまま速やかに通過する方が効率的である場合もある。
【0119】
従って、一実施例に係るロボット掃除機1は、掃除モードを第1掃除モードと第2掃除モードとに分け、使用者の命令または掃除領域の環境に応じて異なる掃除モードで掃除を行うこともできる。
【0120】
図16は、第1掃除モードで掃除動作を行うロボット掃除機1の動作を、図17は、第2掃除モードで掃除動作を行うロボット掃除機1の動作を、上から見た平面図である。
【0121】
図16を参照すると、掃除モードが第1掃除モードに設定されており、ロボット掃除機1の基本走行パターンをジグザグ方式にした場合に、ロボット掃除機1が障害物に接触するまでは補助掃除ツール110を収納した状態で走行し、障害物に接触すると補助掃除ツール110を突出させて、障害物と床とが接する隅部分を掃除する。この時、走行制御部220がロボット掃除機1の走行速度を減少させ、より丁寧に掃除を行うようにしてもよい。障害物を通過すると、再び補助掃除ツール110を収めると共に、ロボット掃除機1の走行速度を減少させた場合には走行速度を上げる。
【0122】
図17を参照すると、掃除モードが第2掃除モードに設定されており、ロボット掃除機1の基本走行パターンをジグザグ方式にした場合に、ロボット掃除機1が障害物に接触するまでは補助掃除ツール110を突出させた状態で走行し、障害物に接触すると補助掃除ツール110を収納させ、隅部分の掃除をすること無く速やかに障害物を通過する。障害物を通過すると、再び補助掃除ツール110を突出させる。
【0123】
ロボット掃除機1が経路マップに基づいて走行する場合に、掃除機本体の大きさを考慮して走行経路の幅を設定することで掃除が完璧に行われるようにすることができる。図16及び図17を共に参照すると、第1掃除モードで掃除を行う場合には、補助掃除ツール110を収納させた状態での掃除可能領域が考慮されるので、走行経路の幅が狭く設定され、第2掃除モードで掃除を行う場合には、補助掃除ツール110を突出させた状態での掃除可能領域が考慮されるので、走行経路の幅が広く設定される。
【0124】
そのため、同じ領域を掃除する場合にも、第1掃除モードでは9個のラインに沿って走行し、第2掃除モードでは8個のラインに沿って走行し、よって、第2掃除モードにおいてより速やかに掃除を完了できる。また、第2掃除モードでは、障害物のない領域で補助掃除ツール110を突出させるので、障害物のない領域をよりきれいに掃除することができる。
【0125】
一方、第1掃除モードでは障害物の隅部分まで掃除することができる。よって、使用者は、好みによって第1掃除モードまたは第2掃除モードを入力部70を介して選択し、所望の掃除を行うことができる。
【0126】
また、ロボット掃除機1を自律掃除モードに設定することも可能である。ロボット掃除機1が周辺映像を撮影するために掃除領域を試験走行しながら、掃除領域に存在する障害物を感知部60で感知し、掃除制御部210で障害物の個数をカウントし、障害物の個数が、あらかじめ設定された基準値以上であれば第2掃除モードに、あらかじめ設定された基準値未満であれば第1掃除モードに設定することができる。
【0127】
あらかじめ設定された基準値は、設計者が実験または統計に基づいて掃除の効率性を考慮して設定することもでき、使用者が設定または変更することもできる。
【0128】
図16及び図17の実施例では、ロボット掃除機1が掃除領域全体をジグザグパターンで走行するとしたが、ジグザグパターンに限定されず、いずれの走行パターンも適用可能である。なお、この実施例を、図8A及び図8Bの実施例において掃除領域の内側部を走行する場合にも適用可能である。
【0129】
また、図8A及び図8Bの実施例と同様に、図16及び図17の実施例も、走行経路がマップによって定められる場合にも、定められない場合にも適用可能である。
【0130】
また、図16及び図17の実施例では、ロボット掃除機1が第1掃除モード及び第2掃除モードで掃除を行うとしたが、ロボット掃除機1の掃除時に補助掃除ツール110が突出されない第3掃除モードでの掃除も可能である。
【0131】
第3掃除モードも同様に、使用者が入力部70を介して選択してもよく、または、感知部60があらかじめ掃除領域に存在する障害物を感知し、制御部200が障害物の個数を算出し、算出された障害物の個数があらかじめ設定された基準値以下の場合に第3掃除モードと設定してもよい。後者は、掃除領域に障害物が多く存在せず、補助掃除ツール110を突出させなくとも十分に掃除できるという点に着目したものである。他の場合としては、算出された障害物の個数があらかじめ設定された基準値以上の場合に第3掃除モードと設定することができる。これは、掃除領域に存在する障害物が多すぎると、補助掃除ツール110を突出及び収容させる動作があまりにも頻繁に反復され、掃除速度の低下や電力の浪費につながるという点に着目したものである。図16及び図17の実施例は、上記2つの場合を含むことができる。
【0132】
また、本発明の実施例は、第1掃除モード、第2掃除モード及び第3掃除モードを全て含むこともでき、その一部のみを含むこともできる。
【0133】
図16及び図17の実施例にも、図8A及び図8Bの実施例と同様に、ホコリ過多領域での補助掃除ツール110の突出・収納動作の反復を適用することができる。
【0134】
図18A及び図18Bは、図16及び図17の実施例に係るロボット掃除機1がホコリ過多領域を通過する場合の動作を、上から見た平面図である。
【0135】
図18A及び図18Bを参照すると、第1掃除モードで掃除する場合も、第2掃除モードで掃除する場合も、走行経路上にホコリ過多領域が存在すると、ロボット掃除機1がホコリ過多領域を走行する間に、補助掃除ツール110の突出・収納を一定周期で反復することで、過多なホコリを効率的に掃き集めたり分散させたりでき、かつ使用者にホコリ過多領域を知らせることができる。上述したように、掃除制御部210は、ホコリ感知部で感知したホコリの量が、あらかじめ設定された基準値以上であると、補助掃除ツール110の突出・収納を反復するように制御することができる。
【0136】
以下、一実施例に係るロボット掃除機1の制御方法について説明する。
【0137】
図19は、図8A及び図8Bの実施例に係るロボット掃除機1の制御方法を示すフローチャートである。
【0138】
図19を参照すると、まず、掃除開始命令が入力されたか否かを判断し(410)、掃除開始命令が入力された場合は(410の「はい」)、ロボット掃除機1の走行パターンを判断する(420)。「壁面追従方式で走行中」というのは、掃除領域の最外側部に沿って走行していることを意味する。
【0139】
420での判断の結果、ロボット掃除機1が壁面追従方式で走行中である場合は(430の「はい」)、補助掃除ツール110をロボット掃除機1本体の外側に突出させる(440)。これにより、壁面と床とが接する隅部まで補助掃除ツール110が届き、丁寧に掃除を行うことができる。
【0140】
この時、ロボット掃除機1の両側に存在する補助掃除ツール110を全て突出させることもでき、壁面側の補助掃除ツール110のみを突出させることもできる。
【0141】
また、ロボット掃除機1が壁面追従方式で走行中の場合には、走行速度を相対的に低く制御することも可能である。ここで、「相対的」というのは、ロボット掃除機1の基本走行速度に設定された速度、または他の走行パターンで走行する場合の走行速度に比べてより低い速度を意味する。速度を低くすると、補助掃除ツール110が隅部に留まる時間が長くなり、より丁寧に掃除を行うことが可能になる。
【0142】
次に、壁面追従方式の走行が終了したか否かを判断する(450の「はい」)。判断の結果、壁面追従方式の走行が終了していないと、補助掃除ツール110が突出された状態を維持する。一方、終了した場合は、補助掃除ツール110を収める(460)。
【0143】
上記の実施例では、ロボット掃除機1の走行パターンとしては、壁面追従方式の他、ジグザグ方式、ランダム方式などを含むこともでき、ロボット掃除機1の走行は、経路マップを用いたものでもよく、経路マップを用いないものでもよい。
【0144】
図20は、図8A及び図8Bの実施例に係るロボット掃除機1が壁面追従方式で走行しながら壁に対面する場合の制御方法を示すフローチャートである。
【0145】
掃除開始命令が入力されたか否かを判断する段階(510)から補助掃除ツール110を突出させる段階(540)までは図19と同様であり、その説明は省略する。
【0146】
壁面追従方式で走行中にロボット掃除機1の前方に壁面が存在することを感知すると(550の「はい」)、補助掃除ツール110の回転速度を上げる(560)。これで、壁面と壁面とが接する隅部を速やかに掃除することができる。
【0147】
その後、壁面追従方式が終了すると(570の「はい」)、補助掃除ツール110を収める(580)。
【0148】
図21は、図8A及び図8Bの実施例に係るロボット掃除機1がホコリ過多領域を通過する場合の制御方法を示すフローチャートである。
【0149】
ロボット掃除機1の走行経路上に存在するホコリを感知する(610)。これは、ロボット掃除機1のいかなる走行経路または掃除モードにも適用可能である。ホコリの感知は、ホコリ流入口33に設けられたホコリ感知部で行われる。
【0150】
感知されたホコリの量が、あらかじめ設定された基準値以上であるか否を判断する(620)。ホコリの量は、ホコリ感知部の受光部に受信された光の量により判断でき、あらかじめ設定された基準値は、設計者または使用者が実験または統計などに基づいて設定できる。
【0151】
判断の結果、感知されたホコリの量があらかじめ設定された基準値以上であると(620の「はい」)、ホコリ過多領域であると判断し(630)、補助掃除ツール110の突出及び収納を一定周期で反復する(640)。これで、ホコリを効果的に掃き集めたり、分散させたり、拭いたりでき、かつ、ホコリの多い領域である旨を使用者に知らせることができる。
【0152】
図22は、図16及び図17の実施例に係るロボット掃除機の制御方法を示すフローチャートである。
【0153】
この実施例に係るロボット掃除機の制御方法は、使用者の命令または障害物感知結果に基づいて第1掃除モードまたは第2掃除モードが設定されるが、図22では、使用者の命令に基づいて掃除モードが設定されるとして説明する。
【0154】
図22を参照すると、まず、掃除開始命令が入力されたか否かを判断し(710)、掃除開始命令が入力された場合は(710の「はい」)、使用者から掃除モード選択について入力される(720)。
【0155】
使用者が第1掃除モードを選択すると(730の「はい」)、補助掃除ツール110を収める(740)。そして、あらかじめ設定された走行パターンまたはランダム方式で走行しつつ、ロボット掃除機1の周辺に障害物があるか否か判断する(750)。ここで、障害物は、ロボット掃除機1の前方に存在するものでもよく、側方に存在するものでもよい。
【0156】
ロボット掃除機1の周辺に障害物があると判断された場合は(750の「はい」)、補助掃除ユニットを突出させる(760)。これで、障害物と床面とが接する隅部分まで丁寧に掃除することができる。
【0157】
その後、ロボット掃除機1が障害物を通過すると(770の「はい」)、補助掃除ツール110を再び収納する(780)。
【0158】
掃除終了命令が入力されていないと(790の「いいえ」)、再び、障害物が感知されたか否かを判断し(750)、それ以降の過程を反復する。
【0159】
一方、使用者が第2掃除モードを選択した場合は(730の「いいえ」)、補助掃除ツール110を突出させる(840)。突出された補助掃除ツール110は、隅部分以外の、掃除領域の広い部分を掃除する。
【0160】
ロボット掃除機1の周辺に障害物があると判断された場合は(850の「はい」)、補助掃除ツール110を再び収納する(860)。これにより、掃除領域全体を速やかに掃除することができる。
【0161】
障害物を通過すると(870の「はい」)、補助掃除ツール110を再び突出させる(880)。そして、掃除終了命令が入力されないと(890の「いいえ」)、再び、走行中に障害物が感知されたか否かを判断し(840)、それ以降の動作を反復する。
【0162】
障害物感知結果に基づいて掃除モードを設定する場合には、マップ設定のためのロボット掃除機1の試験走行中に掃除領域内の障害物を感知し、該感知結果に基づいて障害物の個数を算出する。算出された障害物の個数が、あらかじめ設定された基準値以上であれば、障害物の隅の掃除は行わず、掃除領域全体の掃除を行う第2掃除モードに設定し、図22に示すような第2掃除モードに従って掃除を制御する。
【0163】
算出された障害物の個数が、あらかじめ設定された基準値未満であれば、障害物の隅の掃除を行う第1掃除モードに設定し、図22に示すような第1掃除モードに従って掃除を制御する。
【0164】
また、図21でも述べたように、ホコリ過多領域でのロボット掃除機の制御は、いかなる走行経路または掃除モードにも適用できるため、第2実施例のロボット掃除機制御方法にも適用可能である。したがって、第1掃除モードまたは第2掃除モードに従って走行しつつホコリ感知部が走行経路上のホコリを感知し、感知されたホコリの量が、あらかじめ設定された基準値以上であると、補助掃除ツール110の突出及び収納を一定周期で反復させることで、ホコリを効果的に除去すると同時に、ホコリ過多領域を使用者に知らせることができる。
【0165】
以上の実施例では、補助掃除ツール110をブラシ形態とし、補助掃除ツール110がホコリなどの異物を掃き集めたり分散させたりして掃除を行う例をとって説明したが、補助掃除ツール110を雑巾の形態とし、雑巾で異物を拭いて掃除を行うこともでき、補助掃除ツール110を吸込み器の形態とし、異物を吸い込むことによって掃除を行うこともできる。補助掃除ツール110の種類や掃除方法は特に制限されず、様々な実施例が可能である。
【符号の説明】
【0166】
60 感知部
70 入力部
200 制御部
20 メインブラシユニット
100 補助掃除ユニット
40 走行ユニット
【特許請求の範囲】
【請求項1】
床を走行しつつ該床から異物を除去するロボット掃除機であって、
前記ロボット掃除機の下部に突出及び収納可能に装着される補助掃除ユニットと、
前記ロボット掃除機の掃除領域に位置している障害物を感知する障害物感知部と、
前記掃除領域の最外側部に沿って壁面追従方式で走行しながら前記補助掃除ユニットが突出されるように制御し、前記掃除領域の最外側部に沿う走行が完了すると、前記掃除領域の内側部を走行しながら前記補助掃除ユニットが収納されるように制御する制御部と、
を備えるロボット掃除機。
【請求項2】
前記制御部は、
前記ロボット掃除機が壁面追従方式で走行する場合に、前記補助掃除ユニットのうち、前記壁面側の補助掃除ユニットのみ突出されるように制御する、請求項1に記載のロボット掃除機。
【請求項3】
前記制御部は、
前記ロボット掃除機が壁面追従方式で走行する場合における走行速度を、前記掃除領域の内側部を走行する場合における走行速度よりも低く制御する、請求項1に記載のロボット掃除機。
【請求項4】
前記障害物感知部は、
前記掃除領域に位置している障害物を感知し、且つ超音波センサー、近接センサー及び光センサーのいずれか一つ以上からなる、請求項1に記載のロボット掃除機。
【請求項5】
前記掃除領域の床に存在するホコリを感知し、光センサーからなるホコリ感知部をさらに備える、請求項1に記載のロボット掃除機。
【請求項6】
前記制御部は、
前記障害物感知部が、前記ロボット掃除機の壁面追従方式による走行中に前方に位置する壁を感知すると、前記補助掃除ユニットの掃除速度を上げる、請求項1に記載のロボット掃除機。
【請求項7】
前記制御部は、
前記ホコリ感知部で感知したホコリの量が、あらかじめ設定された基準値以上であると、前記補助掃除ユニットの突出及び収納を一定周期で反復する、請求項5に記載のロボット掃除機。
【請求項8】
突出及び収納可能に装着された補助掃除ユニットを有しているロボット掃除機の制御方法であって、
掃除開始命令が入力されると、前記ロボット掃除機が壁面追従方式で走行するか否かを判断し、
前記ロボット掃除機が壁面追従方式で走行すると、前記補助掃除ユニットを前記ロボット掃除機の外部に突出させ、
前記ロボット掃除機の壁面追従方式の走行が終了したか否かを判断し、
前記壁面追従方式の走行が終了すると、前記補助掃除ユニットを収納すること、
を含む、ロボット掃除機の制御方法。
【請求項9】
前記ロボット掃除機が壁面追従方式で走行する時に、前記補助掃除ユニットのうち、前記壁面側の補助掃除ユニットのみを突出させる、請求項8に記載のロボット掃除機の制御方法。
【請求項10】
前記ロボット掃除機が壁面追従方式で走行する時に、前記ロボット掃除機の走行速度を、前記壁面追従方式以外の走行時の走行速度よりも低く制御する、請求項8に記載のロボット掃除機の制御方法。
【請求項11】
前記ロボット掃除機の前方に存在する障害物を感知することをさらに含み、
前記ロボット掃除機の壁面追従方式による走行中に前方に壁面が存在することを感知すると、前記補助掃除ユニットの掃除速度を上げる、請求項8に記載のロボット掃除機の制御方法。
【請求項12】
前記ロボット掃除機の走行経路に存在するホコリを感知し、
前記感知されたホコリの量が、あらかじめ設定された基準値以上であると、前記補助掃除ユニットの突出及び収納を一定周期で反復することをさらに含む、請求項8に記載のロボット掃除機の制御方法。
【請求項1】
床を走行しつつ該床から異物を除去するロボット掃除機であって、
前記ロボット掃除機の下部に突出及び収納可能に装着される補助掃除ユニットと、
前記ロボット掃除機の掃除領域に位置している障害物を感知する障害物感知部と、
前記掃除領域の最外側部に沿って壁面追従方式で走行しながら前記補助掃除ユニットが突出されるように制御し、前記掃除領域の最外側部に沿う走行が完了すると、前記掃除領域の内側部を走行しながら前記補助掃除ユニットが収納されるように制御する制御部と、
を備えるロボット掃除機。
【請求項2】
前記制御部は、
前記ロボット掃除機が壁面追従方式で走行する場合に、前記補助掃除ユニットのうち、前記壁面側の補助掃除ユニットのみ突出されるように制御する、請求項1に記載のロボット掃除機。
【請求項3】
前記制御部は、
前記ロボット掃除機が壁面追従方式で走行する場合における走行速度を、前記掃除領域の内側部を走行する場合における走行速度よりも低く制御する、請求項1に記載のロボット掃除機。
【請求項4】
前記障害物感知部は、
前記掃除領域に位置している障害物を感知し、且つ超音波センサー、近接センサー及び光センサーのいずれか一つ以上からなる、請求項1に記載のロボット掃除機。
【請求項5】
前記掃除領域の床に存在するホコリを感知し、光センサーからなるホコリ感知部をさらに備える、請求項1に記載のロボット掃除機。
【請求項6】
前記制御部は、
前記障害物感知部が、前記ロボット掃除機の壁面追従方式による走行中に前方に位置する壁を感知すると、前記補助掃除ユニットの掃除速度を上げる、請求項1に記載のロボット掃除機。
【請求項7】
前記制御部は、
前記ホコリ感知部で感知したホコリの量が、あらかじめ設定された基準値以上であると、前記補助掃除ユニットの突出及び収納を一定周期で反復する、請求項5に記載のロボット掃除機。
【請求項8】
突出及び収納可能に装着された補助掃除ユニットを有しているロボット掃除機の制御方法であって、
掃除開始命令が入力されると、前記ロボット掃除機が壁面追従方式で走行するか否かを判断し、
前記ロボット掃除機が壁面追従方式で走行すると、前記補助掃除ユニットを前記ロボット掃除機の外部に突出させ、
前記ロボット掃除機の壁面追従方式の走行が終了したか否かを判断し、
前記壁面追従方式の走行が終了すると、前記補助掃除ユニットを収納すること、
を含む、ロボット掃除機の制御方法。
【請求項9】
前記ロボット掃除機が壁面追従方式で走行する時に、前記補助掃除ユニットのうち、前記壁面側の補助掃除ユニットのみを突出させる、請求項8に記載のロボット掃除機の制御方法。
【請求項10】
前記ロボット掃除機が壁面追従方式で走行する時に、前記ロボット掃除機の走行速度を、前記壁面追従方式以外の走行時の走行速度よりも低く制御する、請求項8に記載のロボット掃除機の制御方法。
【請求項11】
前記ロボット掃除機の前方に存在する障害物を感知することをさらに含み、
前記ロボット掃除機の壁面追従方式による走行中に前方に壁面が存在することを感知すると、前記補助掃除ユニットの掃除速度を上げる、請求項8に記載のロボット掃除機の制御方法。
【請求項12】
前記ロボット掃除機の走行経路に存在するホコリを感知し、
前記感知されたホコリの量が、あらかじめ設定された基準値以上であると、前記補助掃除ユニットの突出及び収納を一定周期で反復することをさらに含む、請求項8に記載のロボット掃除機の制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8A】
【図8B】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18A】
【図18B】
【図19】
【図20】
【図21】
【図22】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8A】
【図8B】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18A】
【図18B】
【図19】
【図20】
【図21】
【図22】
【公開番号】特開2013−85958(P2013−85958A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2012−230845(P2012−230845)
【出願日】平成24年10月18日(2012.10.18)
【出願人】(390019839)三星電子株式会社 (8,520)
【氏名又は名称原語表記】Samsung Electronics Co.,Ltd.
【住所又は居所原語表記】129,Samsung−ro,Yeongtong−gu,Suwon−si,Gyeonggi−do,Republic of Korea
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成24年10月18日(2012.10.18)
【出願人】(390019839)三星電子株式会社 (8,520)
【氏名又は名称原語表記】Samsung Electronics Co.,Ltd.
【住所又は居所原語表記】129,Samsung−ro,Yeongtong−gu,Suwon−si,Gyeonggi−do,Republic of Korea
【Fターム(参考)】
[ Back to top ]