
ロボット教示装置およびその制御方法
【課題】使用者の挙動に則した安全性の高いロボット教示装置およびその制御方法を提供する。
【解決手段】教示装置(10)は、操作を規制する2つのデッドマンスイッチ(18,20)を備える。各スイッチは、押下ストロークの中程の所定範囲をイネーブルポジションに、その両側を非操作ポジションとオーバーポジションに設定している。これらスイッチ(18,20)は、少なくとも一方のスイッチがイネーブルポジションにある場合に装置(10)の操作を許容し、双方のスイッチが非操作ポジションまたはオーバーポジションにある場合に装置の操作を禁止する。装置(10)はさらに、これらスイッチ(18,20)の押下操作が行われたか否かを個別に検出する検出回路を含み、少なくとも一方のスイッチがオーバーポジションにある場合に、双方のスイッチの操作を無効にして装置の操作を禁止する。
【解決手段】教示装置(10)は、操作を規制する2つのデッドマンスイッチ(18,20)を備える。各スイッチは、押下ストロークの中程の所定範囲をイネーブルポジションに、その両側を非操作ポジションとオーバーポジションに設定している。これらスイッチ(18,20)は、少なくとも一方のスイッチがイネーブルポジションにある場合に装置(10)の操作を許容し、双方のスイッチが非操作ポジションまたはオーバーポジションにある場合に装置の操作を禁止する。装置(10)はさらに、これらスイッチ(18,20)の押下操作が行われたか否かを個別に検出する検出回路を含み、少なくとも一方のスイッチがオーバーポジションにある場合に、双方のスイッチの操作を無効にして装置の操作を禁止する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、産業用ロボットや工作機械などに対して所要動作の教示を行うための教示装置に係り、特に、ロボットや工作機械などによる事故を防ぐ為の改良に関する。
【背景技術】
【0002】
工場の生産ラインにおいて用いる産業用ロボットやNC工作機械など(以下、機器と総称する)は、予め専用の教示装置(ティーチペンダント)を用いて所要の動作を教示(プログラミング)され、その教示内容を再生することにより、各種作業を実行する。
教示作業では、対象の機器が教示操作に伴って所定作業の順次ステップ毎の動作を行うが、その際に、教示ミスや機器側の機械的不良などにより、機器が教示作業者の意図と異なる動作をしてしまうことがある。このような場合に、作業者への危険を回避するとともに機器の破損を防止するために、それ以上の教示操作の禁止や、機器の停止が直ちに行われるように構成しておく必要がある。
【0003】
そのため、ティーチペンダントには、3ポジションのデッドマンスイッチと称する保護手段を設けているものがある(例えば、特許文献1参照)。
このデッドマンスイッチは、ティーチペンダントを持つ作業者の指が触れる位置、例えば、ティーチペンダント・ハウジングの裏面側で右手や左手の指が触れる位置に配置され、教示作業者が所定の力で押下している場合のみティーチペンダントの操作を許容するもので、スイッチが手放されたり、強く握り込まれたりした場合には操作を禁止するように構成されている。
【特許文献1】特開2002−355781号公報
【0004】
これは、教示作業者が何らかの原因により機器の動作に異変を感じてびっくりしたり、危険を感じた場合、とっさにティーチペンダントを手放したり、周囲のものを強く握り込んでしまうであろうとの認識に基づいて、デッドマンスイッチがオフになったり強く握られると直ちに教示動作や機器の停止を行うようにして、安全性の確保を図るものである。
なお、人間のとっさの挙動を考慮して、安全性に対する配慮が高い3ポジションのデッドマンスイッチを推奨する傾向が強く、また、地域や利用者によっては、3ポジションのデッドマンスイッチの採用を義務付けているところもある。
【0005】
ところで、ティーチペンダントは、通常、作業者が片手で本体を保持し、他方の手で本体上の入力キーなどを動かして教示操作を行う。これには、左手で保持して右手で操作を行う場合もあれば、その逆もある。また、長時間に及ぶ教示作業における指や腕の疲労を考慮して、ティーチペンダントを任意に持ち代えることができるようにすることが望ましい。
そのため、一般に、デッドマンスイッチは、左手指が触れる部分と、右手指が触れる部分の2ヶ所に配置され、2つのデッドマンスイッチがそれぞれ独立的に有効(操作可能状態)に機能するようになっている。
【0006】
このように2つのデッドマンスイッチを備えている場合、作業者がとっさの場合に、片方のデッドマンスイッチを所定押下力で握りながら他方のデッドマンスイッチを強く握ってしまう可能性がある。その場合、一方のデッドマンスイッチが有効になっているので、ティーチペンダントは操作禁止状態に移行せず、機器の動作が継続してしまうという問題が生じる。
【0007】
そこで、上述した特許公報による装置は、左右のデッドマンスイッチを同時に押下したことを検知する検出手段を設け、左右のデッドマンスイッチが同時に押下されると即座に操作禁止状態に移行するようにして安全性の確保を行っている。
しかし、このような構成では、教示作業者がティーチペンダントを持ち替えようとして、或いは不注意で、左右のデッドマンスイッチを同時に押下した場合に、ティーチペンダントが操作禁止状態に移行してしまう。これは安全性の面では問題ないものの、作業性と云う点で改善の余地がある。
【発明の開示】
【発明が解決しようとする課題】
【0008】
本発明は、産業用ロボットや工作機械等に対して用いる、使用者の挙動に則した安全性の高い教示装置の提供を目的とする。
本発明の別の目的は、ロボット教示装置の安全性と使い勝手を両立し得る制御方法を提供することである。
【課題を解決するための手段】
【0009】
本発明によると、NC工作機械を含むロボット機器に所要動作を教示するための教示装置は、この装置の操作を規制する制御手段を有する。制御手段は、各々が押下ストロークの所定範囲をイネーブルポジションに、イネーブルポジションより押下ストロークの少ない範囲を非操作ポジションに、イネーブルポジションより押下ストロークの多い範囲をオーバーポジションにした第1と第2の3ポジションスイッチと、これらスイッチの押下操作が行われたか否かを個別に検出する検出手段とを含み、少なくとも一方のスイッチがイネーブルポジションにある場合に装置の操作を許容し、双方のスイッチが非操作ポジションまたはオーバーポジションにある場合に装置の操作を禁止する。この教示装置は、少なくとも一方のスイッチがオーバーポジションにある場合に、検出手段が双方のスイッチの操作を無効にして装置の操作を禁止することを特徴とする。
【0010】
本発明の別の態様による、NC工作機械を含むロボット機器に所要動作を教示する教示装置のための制御方法は、各々が押下ストロークの所定範囲をイネーブルポジションに、イネーブルポジションより押下ストロークの少ない範囲を非操作ポジションに、イネーブルポジションより押下ストロークの多い範囲をオーバーポジションにした第1と第2の3ポジションスイッチを設けて、少なくとも一方のスイッチがイネーブルポジションにある場合に装置の操作を許容し、双方のスイッチが非操作ポジションまたはオーバーポジションにある場合に装置の操作を禁止して、教示装置の操作を規制するものである。この方法は、第1と第2のスイッチの押下操作が行われたか否かを個別に検出し、少なくとも一方のスイッチがオーバーポジションにある場合に、双方のスイッチの操作を無効にして装置の操作を禁止することを特徴とする。
【0011】
上記構成によれば、教示作業者が、とっさの場合に、ティーチペンダントを手放すと、第1と第2のスイッチが非操作ポジションになり、あるいはティーチペンダントを強く握りしめた場合には、少なくとも一方のスイッチがオーバーポジションになり、ティーチペンダントを即座に操作禁止状態にして、機器のそれ以上の動作を止める。
一方、教示作業者が持ち替えようとして、ティーチペンダントを通常の力で両手で握っても、スイッチの操作が作業者の意図に反して無効になることはなく、機器の動作は継続する。
【0012】
検出手段は、次のような電気回路とすることが好適である。この回路は、第1のスイッチの押下で開く第1および第2接点と、第2のスイッチの押下で開く第3および第4接点と、これらスイッチの操作を個別に無効にする第6および第7リレー接点を備えた電磁リレーとを含み、これら第1、第3、第2、第4および電磁リレーのコイルを直列に電源に接続するとともに、電磁リレーの第5リレー接点を第1および第3接点と並列に電源に接続する。この回路では、双方のスイッチの非押下で電磁リレーを作動させて第5リレー接点を閉ざすことにより電磁リレーの自己保持回路を形成し、少なくとも一方のスイッチのオーバーポジションへの押下により電磁リレーの自己保持回路を解除し、第6と第7リレー接点を開いて双方のスイッチの操作を無効にする。
この電気回路によると、従来の、デッドマンスイッチを備えたティーチペンダントの構造を大きく変更することなく、従って比較的低コストで上述した安全性と使い勝手の両立を図ることができる。
【0013】
少なくとも一方のスイッチがオーバーポジションにある場合の教示装置の操作禁止状態は、第1と第2のスイッチの双方が非操作ポジションに復帰するまで継続することが好ましい。
これによって、作業者が強く握ったスイッチを放して戻す過程で、このスイッチがイネーブルポジションを通過することによって起こる操作禁止状態の解除を防止することができる。すなわち、非操作ポジションへの双方のスイッチの移行を確認すると云う動作が必要になり、通常と異なる状況に陥った場合に、教示装置の復帰に時間制限を加えて、安全性のより一層の向上を図ることができる。
【発明の効果】
【0014】
本発明の装置と方法によると、教示作業者が機器の不意の動作に驚いて自失した場合であっても、作業者の自然な挙動によって機器のそれ以上の動作を止めることができる。また、作業者が持ち替えのために、あるいは不注意で、ティーチペンダントを両手で握っても、適正な力である限り、作業者の意図に反してティーチペンダントが操作禁止状態になることはない。
従って、本発明は、ロボット教示作業における事故を防いで安全性を向上させるとともに、良好な作業性と使い勝手を提供し得るものである。
【実施例】
【0015】
次に、本発明の実施例を、図面を参照して説明する。
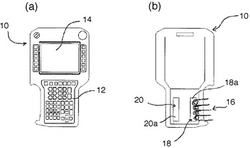
図1(a)および(b)は本実施例による機器用の教示ないしコントロール装置10(以下、ティーチペンダントと称す)の外観を示しており、図1(a)はその表面(操作面)側を、図1(b)は裏面側を概略的に示している。
【0016】
図1(a)を参照すると、ティーチペンダント10は、操作対象となる機器、例えば、自動溶接ロボットや自動組み立てロボット等の産業用ロボットに、所要動作の教示を行うためのコマンドや数値を入力するための入力部12と、入力した結果や各種メッセージ等を表示する表示部(例えば、液晶表示装置)14を備えている。
また、裏面側には、図1(b)に示すように、ティーチペンダント10の操作、つまり、対象機器の操作を可能にする許容状態と、機器の操作を禁止する禁止状態とを判別可能な手段として、2つのデッドマンスイッチ18,20が設置されている。
ティーチペンダント10自体の構成は、本発明による改良点を除いて従来のものと同様でよく、これ以上の説明を省略する。
【0017】
作業者がティーチペンダント10の操作を行う場合、片手でティーチペンダント10を把持して支え、もう一方の手で入力部12を操作する。例えば、教示作業者が左手でティーチペンダント10を保持する場合、図1(b)に見られるように、左手の親指を除く指16がティーチペンダント10の裏面側に添えられる。
第1のデッドマンスイッチ18を作動させるためのノブ18aが、ティーチペンダント10を通常の状態で保持した場合に、ちょうど作業者の指16の指先が触れる位置に配置されている。同様に、第2のデッドマンスイッチ20のノブ20aが、ティーチペンダント10を右手で保持した場合に、作業者の右手の指先が触れる位置に配置されている。
【0018】
これらのデッドマンスイッチ18,20は、それぞれ押下復帰式の3ポジションスイッチであり、ノブ18a,20aの押下量に応じて、連続的に、非操作ポジション、イネーブルポジション、そしてオーバーポジションに切り換わるように構成されている。
すなわち、デッドマンスイッチ18(20)のノブ18a(20a)の全押下ストロークの中位付近の所定範囲にわたって、ティーチペンダント10の操作を許容するイネーブルポジションが設定されている。このイネーブルポジションは、作業者が手でティーチペンダント10を支えた時に、普通の指の力で押し込まれる位置にある。
【0019】
イネーブルポジションより押下ストロークの小さい範囲が、ティーチペンダント10の操作を禁止する非操作ポジションに設定されている。この非操作ポジションには、指などが全く触れない状態もふくんでいる。さらに、イネーブルポジションより押下ストロークの大きい範囲が、ティーチペンダント操作を再び禁止するオーバーポジションとして設定されている。
従って、ティーチペンダント10を支える指先でデッドマンスイッチ18(20)のノブ18a(20a)をイネーブルポジションに押下した場合のみ、ティーチペンダント10による操作が可能になる。
【0020】
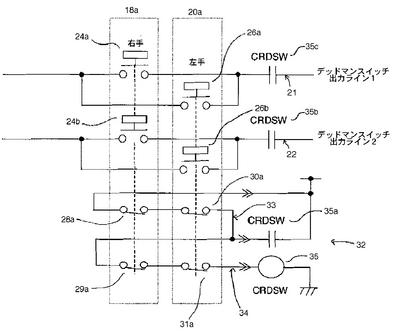
図2は、このようなティーチペンダント10の操作切り換えを実現する電気回路を示している。
同回路は、デッドマンスイッチ18,20につながっていて、ティーチペンダント10を操作可能にする第1と第2のデッドマンスイッチ出力ライン21,22を含んでいる。これらの出力ラインは並列回路となっている。
【0021】
デッドマンスイッチ18は、非操作ポジション及びオーバーポジションの時に出力ライン21をOFFし、イネーブルポジションの時に出力ライン21をONするイネーブル接点24aを備えている。同様に、デッドマンスイッチ20も、非操作ポジション及びオーバーポジションの時に出力ライン21をOFFし、イネーブルポジションの時に出力ライン21をONするイネーブル接点26aを備えている。
イネーブル接点24a,26aは、出力ライン21に対して並列に接続されている。
デッドマンスイッチ18,20は、第2のデッドマンスイッチ出力ライン22についても同様なイネーブル接点24b,26bを設けており、これら接点24b,26bは出力ライン22に対して並列に接続されている。
【0022】
デッドマンスイッチ18,20には、更に、検出回路32が設けられている。この回路は、デッドマンスイッチが操作されているか否かを検出するライン33と、オーバーポジションに操作されているかを検出するライン34とを含んでいる。
また、デッドマンスイッチ18は、このデッドマンスイッチが操作されているか否かを検出するための検出手段として第1接点(b接点:常閉接点)28aを備えている。同様に、デッドマンスイッチ20は、操作されているか否かを検出するための検出手段として第3接点(b接点)30aを備えている。これら第1と第3接点28a,30aは、リリース検出接点と称され、強制開離機構として、デッドマンスイッチ18,20のノブ18a,20aが操作されると接点を開いて、ライン33を遮断する構成である。
【0023】
デッドマンスイッチ18は更に、当該デッドマンスイッチがオーバーポジションに操作されているか否かを検出するための検出手段として第2接点(b接点:常閉接点)29aを備えている。同様に、デッドマンスイッチ20は、オーバーポジションに操作されているか否かを検出するための検出手段として第4接点(b接点:常閉接点)31aを備えている。
これら第2と第4接点29a,31aは、3ポジション(オーバーポジション)検出接点と称され、強制開離機構として、デッドマンスイッチ18,20のノブ18a,20aがオーバーポジションまで押し下げられた場合に接点を開き、ライン34を遮断する構成である。
【0024】
リリース接点である第1,第3接点28a,30aを含むライン33と、3ポジション検出接点である第2,第4接点29a,31aを含むライン34と、そして電磁リレー35のコイルCRDSWとが直列に配置されて、検出回路32を構成している。この検出回路は、独立に電源(例えば24V)に接続している。さらに、電磁リレーの第5のa接点(リレー接点)35aが第1,第3接点28a,30aと並列に電源に接続されている。
【0025】
そのため、図2に見られるように、検出回路32では、第1と第3接点28a,30aおよび第2と第4接点29a,31aが閉じている、すなわち、デッドマンスイッチ18,20が非操作状態であると、電磁リレー35はコイルCRDSWに電流が流れてONになる。それに伴って、電磁リレー35のリレー接点35aが閉じ、第1と第3接点28a,30aを迂回して電磁リレー35へ電流を通すための自己保持回路を形成する。
電磁リレー35はさらに、第6と第7のa接点35b,35cを備えている。これら接点はデッドマンスイッチ出力ライン21,22にそれぞれ直列に接続されており、電磁リレー35がOFFであると開いている。すなわち、検出回路32がON状態でのみ、デッドマンスイッチ出力ライン21,22が有効となるように構成している。
【0026】
以上説明したデッドマンスイッチ18,20、出力ライン21,22および検出回路32は、ティーチペンダント10の操作を規制する制御手段を構成しており、その動作を、図1(a),(b)および図2を参照して説明する。
【0027】
先ず、ティーチペンダント10に電源が投入され、作業者がデッドマンスイッチ18,20のノブ18a,20aを操作していない状態では、検出回路32の4つの接点28a,30a,29a,31aが閉じている。そのため、ライン33,34を通して電流が流れ、電磁リレー35のコイルCRDSWが励磁されて、この電磁リレーの接点35a,35b,35cが閉(ON)となる。
第5のリレー接点35aがONになることによって、同接点と、ライン34の3ポジション検出用の第2と第4接点29a,31aとを通る自己保持回路が形成され、電磁リレー35へ電流が流れ続ける。
【0028】
デッドマンスイッチ出力ライン21,22は、第6と第7のリレー接点35b,35cが閉じていることで、スタンバイ(有効待機)状態となる。この時に、デッドマンスイッチ18または20、あるいは両方ともが作業者の押下操作によってイネーブルポジションに操作されると、デッドマンスイッチ信号がティーチペンダント10の制御回路に出力され、ティーチペンダントを操作許容状態にする。
この時、デッドマンスイッチの操作によって、検出回路32の接点28aまたは/および30aが開かれる。この場合も、検出回路32は、リレー接点35aを通る自己保持回路が形成されているため、電磁リレー35がON状態のままであり、リレー接点35c,35bのON状態を継続して、デッドマン出力ライン21,22の有効状態を維持する。
【0029】
次に、デッドマンスイッチスイッチ18,20のいずれか一方、または両方がオーバーポジション位置へ操作された場合について説明する。
例えば、デッドマンスイッチ18がオーバーポジションまで動かされると、3ポジション検出用の第2接点29aが開いて、ライン34を通る電流を遮断する。そのため、電磁リレー35が消磁して、リレー接点35a,35b,35cが開(OFF)状態となる。これに伴って、電磁リレー35の自己保持回路が無くなるとともに、デッドマンスイッチ出力ライン21,22が遮断される。こうしてティーチペンダント10の操作禁止状態が確立され、すなわち、教示対象機器の操作が禁止される。この操作禁止状態は、電磁リレー35がOFF状態にある間、継続する。
【0030】
その後、教示操作者が押下する操作力を弱めると、デッドマンスイッチ18は、オーバーポジション位置から非操作ポジションへ復帰する。この動きによって、3ポジション検出用の第2接点29aは閉(ON)状態へ移行するが、リリース検出用の接点28a,30aが開(OFF)状態であるので、電磁リレー35はOFF状態のままである。
【0031】
なお、ティーチペンダント10は、操作禁止状態が確立された後、デッドマンスイッチ18,20のノブ18a,20aの双方を一旦離すことにより、前述した電源投入時の定常状態(スタンバイ状態)に戻すことができる。
【0032】
その場合、デッドマンスイッチ18,20は、オーバーポジションからイネーブルポジションを通って復帰するが、この際に、確立されている禁止状態が一時的にせよ解除されることは好ましくない。
そこで、デッドマンスイッチ18,20のノブ18a,20aの両方が完全に非操作ポジションに動かされたことが確認されるまで、操作禁止状態を維持して、確認できた後に定常状態へ復帰させるようにすることが好ましい。
本発明では、図2に示すリレー回路により、操作禁止状態を維持する安全な装置を提供する。例えば、デッドマンスイッチ18が操作された場合、まず、ノブ18aの押下により、リリース検出用の接点28aが開(OFF)となる。そのままオーバーポジションまで動かされると、3ポジション検出用の第2接点29aが開いて、ライン34を通る電流を遮断する。そのため、電磁リレー35が消磁して、リレー接点35a,35b,35cが開(OFF)状態となる。これに伴って、電磁リレー35の自己保持回路が無くなるとともに、デッドマンスイッチ出力ライン21,22が遮断される。こうしてティーチペンダント10の操作禁止状態が確立され、すなわち、教示対象機器の操作が禁止される。
次に、デッドマンスイッチ18のノブ18aを戻していった場合、まず3ポジション検出用の第2接点29aが閉(ON)となる。この状態では、リリース検出用の接点28aはまだ開(OFF)状態であり、電磁リレー35には電流が供給されず、OFF状態を保持する。操作禁止状態は、操作者がデッドマンスイッチ18のノブ18aを離し、リリース検出用の接点28aが閉(ON)するまで、継続する。このように、操作禁止状態からの復帰作業に教示作業者の意図的な操作を要するようにすることで、全体的な安全性がより向上する。
【0033】
以上、本発明の実施例を説明したが、本発明はこの特定の実施例のみに限定されるものではなく、添付する特許請求の範囲の記載内で、説明した形態に種々の変更を加えることができ、あるいは本発明が他の形態を採ることも可能である。
例えば、実施例における検出回路32の電磁リレー35として安全リレーを用いることにより、ティーチペンダントへの電源投入時にリレーの接点溶着の有無を検出し、溶着を検出した場合には、ティーチペンダントの動作を禁止することも可能である。
【図面の簡単な説明】
【0034】
【図1】本発明の実施例によるティーチペンダント(教示装置)の外観図であり、(a)は表面側を、(b)は裏面側を示している。
【図2】図1のティーチペンダントの操作状況を判別して、その操作の許容・禁止を設定するための回路構成を示す説明図である。
【符号の説明】
【0035】
10 ティーチペンダント(教示装置)
18,20 デッドマンスイッチ(3ポジションスイッチ)
21,22 デッドマンスイッチ出力ライン
24a,24b イネーブル接点
26a,26b イネーブル接点
28a 第1接点
29a 第2接点
30a 第3接点
31a 第4接点
32 検出回路
35 電磁リレー
35a 第5リレー接点
35b 第6リレー接点
35c 第7リレー接点
【技術分野】
【0001】
本発明は、産業用ロボットや工作機械などに対して所要動作の教示を行うための教示装置に係り、特に、ロボットや工作機械などによる事故を防ぐ為の改良に関する。
【背景技術】
【0002】
工場の生産ラインにおいて用いる産業用ロボットやNC工作機械など(以下、機器と総称する)は、予め専用の教示装置(ティーチペンダント)を用いて所要の動作を教示(プログラミング)され、その教示内容を再生することにより、各種作業を実行する。
教示作業では、対象の機器が教示操作に伴って所定作業の順次ステップ毎の動作を行うが、その際に、教示ミスや機器側の機械的不良などにより、機器が教示作業者の意図と異なる動作をしてしまうことがある。このような場合に、作業者への危険を回避するとともに機器の破損を防止するために、それ以上の教示操作の禁止や、機器の停止が直ちに行われるように構成しておく必要がある。
【0003】
そのため、ティーチペンダントには、3ポジションのデッドマンスイッチと称する保護手段を設けているものがある(例えば、特許文献1参照)。
このデッドマンスイッチは、ティーチペンダントを持つ作業者の指が触れる位置、例えば、ティーチペンダント・ハウジングの裏面側で右手や左手の指が触れる位置に配置され、教示作業者が所定の力で押下している場合のみティーチペンダントの操作を許容するもので、スイッチが手放されたり、強く握り込まれたりした場合には操作を禁止するように構成されている。
【特許文献1】特開2002−355781号公報
【0004】
これは、教示作業者が何らかの原因により機器の動作に異変を感じてびっくりしたり、危険を感じた場合、とっさにティーチペンダントを手放したり、周囲のものを強く握り込んでしまうであろうとの認識に基づいて、デッドマンスイッチがオフになったり強く握られると直ちに教示動作や機器の停止を行うようにして、安全性の確保を図るものである。
なお、人間のとっさの挙動を考慮して、安全性に対する配慮が高い3ポジションのデッドマンスイッチを推奨する傾向が強く、また、地域や利用者によっては、3ポジションのデッドマンスイッチの採用を義務付けているところもある。
【0005】
ところで、ティーチペンダントは、通常、作業者が片手で本体を保持し、他方の手で本体上の入力キーなどを動かして教示操作を行う。これには、左手で保持して右手で操作を行う場合もあれば、その逆もある。また、長時間に及ぶ教示作業における指や腕の疲労を考慮して、ティーチペンダントを任意に持ち代えることができるようにすることが望ましい。
そのため、一般に、デッドマンスイッチは、左手指が触れる部分と、右手指が触れる部分の2ヶ所に配置され、2つのデッドマンスイッチがそれぞれ独立的に有効(操作可能状態)に機能するようになっている。
【0006】
このように2つのデッドマンスイッチを備えている場合、作業者がとっさの場合に、片方のデッドマンスイッチを所定押下力で握りながら他方のデッドマンスイッチを強く握ってしまう可能性がある。その場合、一方のデッドマンスイッチが有効になっているので、ティーチペンダントは操作禁止状態に移行せず、機器の動作が継続してしまうという問題が生じる。
【0007】
そこで、上述した特許公報による装置は、左右のデッドマンスイッチを同時に押下したことを検知する検出手段を設け、左右のデッドマンスイッチが同時に押下されると即座に操作禁止状態に移行するようにして安全性の確保を行っている。
しかし、このような構成では、教示作業者がティーチペンダントを持ち替えようとして、或いは不注意で、左右のデッドマンスイッチを同時に押下した場合に、ティーチペンダントが操作禁止状態に移行してしまう。これは安全性の面では問題ないものの、作業性と云う点で改善の余地がある。
【発明の開示】
【発明が解決しようとする課題】
【0008】
本発明は、産業用ロボットや工作機械等に対して用いる、使用者の挙動に則した安全性の高い教示装置の提供を目的とする。
本発明の別の目的は、ロボット教示装置の安全性と使い勝手を両立し得る制御方法を提供することである。
【課題を解決するための手段】
【0009】
本発明によると、NC工作機械を含むロボット機器に所要動作を教示するための教示装置は、この装置の操作を規制する制御手段を有する。制御手段は、各々が押下ストロークの所定範囲をイネーブルポジションに、イネーブルポジションより押下ストロークの少ない範囲を非操作ポジションに、イネーブルポジションより押下ストロークの多い範囲をオーバーポジションにした第1と第2の3ポジションスイッチと、これらスイッチの押下操作が行われたか否かを個別に検出する検出手段とを含み、少なくとも一方のスイッチがイネーブルポジションにある場合に装置の操作を許容し、双方のスイッチが非操作ポジションまたはオーバーポジションにある場合に装置の操作を禁止する。この教示装置は、少なくとも一方のスイッチがオーバーポジションにある場合に、検出手段が双方のスイッチの操作を無効にして装置の操作を禁止することを特徴とする。
【0010】
本発明の別の態様による、NC工作機械を含むロボット機器に所要動作を教示する教示装置のための制御方法は、各々が押下ストロークの所定範囲をイネーブルポジションに、イネーブルポジションより押下ストロークの少ない範囲を非操作ポジションに、イネーブルポジションより押下ストロークの多い範囲をオーバーポジションにした第1と第2の3ポジションスイッチを設けて、少なくとも一方のスイッチがイネーブルポジションにある場合に装置の操作を許容し、双方のスイッチが非操作ポジションまたはオーバーポジションにある場合に装置の操作を禁止して、教示装置の操作を規制するものである。この方法は、第1と第2のスイッチの押下操作が行われたか否かを個別に検出し、少なくとも一方のスイッチがオーバーポジションにある場合に、双方のスイッチの操作を無効にして装置の操作を禁止することを特徴とする。
【0011】
上記構成によれば、教示作業者が、とっさの場合に、ティーチペンダントを手放すと、第1と第2のスイッチが非操作ポジションになり、あるいはティーチペンダントを強く握りしめた場合には、少なくとも一方のスイッチがオーバーポジションになり、ティーチペンダントを即座に操作禁止状態にして、機器のそれ以上の動作を止める。
一方、教示作業者が持ち替えようとして、ティーチペンダントを通常の力で両手で握っても、スイッチの操作が作業者の意図に反して無効になることはなく、機器の動作は継続する。
【0012】
検出手段は、次のような電気回路とすることが好適である。この回路は、第1のスイッチの押下で開く第1および第2接点と、第2のスイッチの押下で開く第3および第4接点と、これらスイッチの操作を個別に無効にする第6および第7リレー接点を備えた電磁リレーとを含み、これら第1、第3、第2、第4および電磁リレーのコイルを直列に電源に接続するとともに、電磁リレーの第5リレー接点を第1および第3接点と並列に電源に接続する。この回路では、双方のスイッチの非押下で電磁リレーを作動させて第5リレー接点を閉ざすことにより電磁リレーの自己保持回路を形成し、少なくとも一方のスイッチのオーバーポジションへの押下により電磁リレーの自己保持回路を解除し、第6と第7リレー接点を開いて双方のスイッチの操作を無効にする。
この電気回路によると、従来の、デッドマンスイッチを備えたティーチペンダントの構造を大きく変更することなく、従って比較的低コストで上述した安全性と使い勝手の両立を図ることができる。
【0013】
少なくとも一方のスイッチがオーバーポジションにある場合の教示装置の操作禁止状態は、第1と第2のスイッチの双方が非操作ポジションに復帰するまで継続することが好ましい。
これによって、作業者が強く握ったスイッチを放して戻す過程で、このスイッチがイネーブルポジションを通過することによって起こる操作禁止状態の解除を防止することができる。すなわち、非操作ポジションへの双方のスイッチの移行を確認すると云う動作が必要になり、通常と異なる状況に陥った場合に、教示装置の復帰に時間制限を加えて、安全性のより一層の向上を図ることができる。
【発明の効果】
【0014】
本発明の装置と方法によると、教示作業者が機器の不意の動作に驚いて自失した場合であっても、作業者の自然な挙動によって機器のそれ以上の動作を止めることができる。また、作業者が持ち替えのために、あるいは不注意で、ティーチペンダントを両手で握っても、適正な力である限り、作業者の意図に反してティーチペンダントが操作禁止状態になることはない。
従って、本発明は、ロボット教示作業における事故を防いで安全性を向上させるとともに、良好な作業性と使い勝手を提供し得るものである。
【実施例】
【0015】
次に、本発明の実施例を、図面を参照して説明する。
図1(a)および(b)は本実施例による機器用の教示ないしコントロール装置10(以下、ティーチペンダントと称す)の外観を示しており、図1(a)はその表面(操作面)側を、図1(b)は裏面側を概略的に示している。
【0016】
図1(a)を参照すると、ティーチペンダント10は、操作対象となる機器、例えば、自動溶接ロボットや自動組み立てロボット等の産業用ロボットに、所要動作の教示を行うためのコマンドや数値を入力するための入力部12と、入力した結果や各種メッセージ等を表示する表示部(例えば、液晶表示装置)14を備えている。
また、裏面側には、図1(b)に示すように、ティーチペンダント10の操作、つまり、対象機器の操作を可能にする許容状態と、機器の操作を禁止する禁止状態とを判別可能な手段として、2つのデッドマンスイッチ18,20が設置されている。
ティーチペンダント10自体の構成は、本発明による改良点を除いて従来のものと同様でよく、これ以上の説明を省略する。
【0017】
作業者がティーチペンダント10の操作を行う場合、片手でティーチペンダント10を把持して支え、もう一方の手で入力部12を操作する。例えば、教示作業者が左手でティーチペンダント10を保持する場合、図1(b)に見られるように、左手の親指を除く指16がティーチペンダント10の裏面側に添えられる。
第1のデッドマンスイッチ18を作動させるためのノブ18aが、ティーチペンダント10を通常の状態で保持した場合に、ちょうど作業者の指16の指先が触れる位置に配置されている。同様に、第2のデッドマンスイッチ20のノブ20aが、ティーチペンダント10を右手で保持した場合に、作業者の右手の指先が触れる位置に配置されている。
【0018】
これらのデッドマンスイッチ18,20は、それぞれ押下復帰式の3ポジションスイッチであり、ノブ18a,20aの押下量に応じて、連続的に、非操作ポジション、イネーブルポジション、そしてオーバーポジションに切り換わるように構成されている。
すなわち、デッドマンスイッチ18(20)のノブ18a(20a)の全押下ストロークの中位付近の所定範囲にわたって、ティーチペンダント10の操作を許容するイネーブルポジションが設定されている。このイネーブルポジションは、作業者が手でティーチペンダント10を支えた時に、普通の指の力で押し込まれる位置にある。
【0019】
イネーブルポジションより押下ストロークの小さい範囲が、ティーチペンダント10の操作を禁止する非操作ポジションに設定されている。この非操作ポジションには、指などが全く触れない状態もふくんでいる。さらに、イネーブルポジションより押下ストロークの大きい範囲が、ティーチペンダント操作を再び禁止するオーバーポジションとして設定されている。
従って、ティーチペンダント10を支える指先でデッドマンスイッチ18(20)のノブ18a(20a)をイネーブルポジションに押下した場合のみ、ティーチペンダント10による操作が可能になる。
【0020】
図2は、このようなティーチペンダント10の操作切り換えを実現する電気回路を示している。
同回路は、デッドマンスイッチ18,20につながっていて、ティーチペンダント10を操作可能にする第1と第2のデッドマンスイッチ出力ライン21,22を含んでいる。これらの出力ラインは並列回路となっている。
【0021】
デッドマンスイッチ18は、非操作ポジション及びオーバーポジションの時に出力ライン21をOFFし、イネーブルポジションの時に出力ライン21をONするイネーブル接点24aを備えている。同様に、デッドマンスイッチ20も、非操作ポジション及びオーバーポジションの時に出力ライン21をOFFし、イネーブルポジションの時に出力ライン21をONするイネーブル接点26aを備えている。
イネーブル接点24a,26aは、出力ライン21に対して並列に接続されている。
デッドマンスイッチ18,20は、第2のデッドマンスイッチ出力ライン22についても同様なイネーブル接点24b,26bを設けており、これら接点24b,26bは出力ライン22に対して並列に接続されている。
【0022】
デッドマンスイッチ18,20には、更に、検出回路32が設けられている。この回路は、デッドマンスイッチが操作されているか否かを検出するライン33と、オーバーポジションに操作されているかを検出するライン34とを含んでいる。
また、デッドマンスイッチ18は、このデッドマンスイッチが操作されているか否かを検出するための検出手段として第1接点(b接点:常閉接点)28aを備えている。同様に、デッドマンスイッチ20は、操作されているか否かを検出するための検出手段として第3接点(b接点)30aを備えている。これら第1と第3接点28a,30aは、リリース検出接点と称され、強制開離機構として、デッドマンスイッチ18,20のノブ18a,20aが操作されると接点を開いて、ライン33を遮断する構成である。
【0023】
デッドマンスイッチ18は更に、当該デッドマンスイッチがオーバーポジションに操作されているか否かを検出するための検出手段として第2接点(b接点:常閉接点)29aを備えている。同様に、デッドマンスイッチ20は、オーバーポジションに操作されているか否かを検出するための検出手段として第4接点(b接点:常閉接点)31aを備えている。
これら第2と第4接点29a,31aは、3ポジション(オーバーポジション)検出接点と称され、強制開離機構として、デッドマンスイッチ18,20のノブ18a,20aがオーバーポジションまで押し下げられた場合に接点を開き、ライン34を遮断する構成である。
【0024】
リリース接点である第1,第3接点28a,30aを含むライン33と、3ポジション検出接点である第2,第4接点29a,31aを含むライン34と、そして電磁リレー35のコイルCRDSWとが直列に配置されて、検出回路32を構成している。この検出回路は、独立に電源(例えば24V)に接続している。さらに、電磁リレーの第5のa接点(リレー接点)35aが第1,第3接点28a,30aと並列に電源に接続されている。
【0025】
そのため、図2に見られるように、検出回路32では、第1と第3接点28a,30aおよび第2と第4接点29a,31aが閉じている、すなわち、デッドマンスイッチ18,20が非操作状態であると、電磁リレー35はコイルCRDSWに電流が流れてONになる。それに伴って、電磁リレー35のリレー接点35aが閉じ、第1と第3接点28a,30aを迂回して電磁リレー35へ電流を通すための自己保持回路を形成する。
電磁リレー35はさらに、第6と第7のa接点35b,35cを備えている。これら接点はデッドマンスイッチ出力ライン21,22にそれぞれ直列に接続されており、電磁リレー35がOFFであると開いている。すなわち、検出回路32がON状態でのみ、デッドマンスイッチ出力ライン21,22が有効となるように構成している。
【0026】
以上説明したデッドマンスイッチ18,20、出力ライン21,22および検出回路32は、ティーチペンダント10の操作を規制する制御手段を構成しており、その動作を、図1(a),(b)および図2を参照して説明する。
【0027】
先ず、ティーチペンダント10に電源が投入され、作業者がデッドマンスイッチ18,20のノブ18a,20aを操作していない状態では、検出回路32の4つの接点28a,30a,29a,31aが閉じている。そのため、ライン33,34を通して電流が流れ、電磁リレー35のコイルCRDSWが励磁されて、この電磁リレーの接点35a,35b,35cが閉(ON)となる。
第5のリレー接点35aがONになることによって、同接点と、ライン34の3ポジション検出用の第2と第4接点29a,31aとを通る自己保持回路が形成され、電磁リレー35へ電流が流れ続ける。
【0028】
デッドマンスイッチ出力ライン21,22は、第6と第7のリレー接点35b,35cが閉じていることで、スタンバイ(有効待機)状態となる。この時に、デッドマンスイッチ18または20、あるいは両方ともが作業者の押下操作によってイネーブルポジションに操作されると、デッドマンスイッチ信号がティーチペンダント10の制御回路に出力され、ティーチペンダントを操作許容状態にする。
この時、デッドマンスイッチの操作によって、検出回路32の接点28aまたは/および30aが開かれる。この場合も、検出回路32は、リレー接点35aを通る自己保持回路が形成されているため、電磁リレー35がON状態のままであり、リレー接点35c,35bのON状態を継続して、デッドマン出力ライン21,22の有効状態を維持する。
【0029】
次に、デッドマンスイッチスイッチ18,20のいずれか一方、または両方がオーバーポジション位置へ操作された場合について説明する。
例えば、デッドマンスイッチ18がオーバーポジションまで動かされると、3ポジション検出用の第2接点29aが開いて、ライン34を通る電流を遮断する。そのため、電磁リレー35が消磁して、リレー接点35a,35b,35cが開(OFF)状態となる。これに伴って、電磁リレー35の自己保持回路が無くなるとともに、デッドマンスイッチ出力ライン21,22が遮断される。こうしてティーチペンダント10の操作禁止状態が確立され、すなわち、教示対象機器の操作が禁止される。この操作禁止状態は、電磁リレー35がOFF状態にある間、継続する。
【0030】
その後、教示操作者が押下する操作力を弱めると、デッドマンスイッチ18は、オーバーポジション位置から非操作ポジションへ復帰する。この動きによって、3ポジション検出用の第2接点29aは閉(ON)状態へ移行するが、リリース検出用の接点28a,30aが開(OFF)状態であるので、電磁リレー35はOFF状態のままである。
【0031】
なお、ティーチペンダント10は、操作禁止状態が確立された後、デッドマンスイッチ18,20のノブ18a,20aの双方を一旦離すことにより、前述した電源投入時の定常状態(スタンバイ状態)に戻すことができる。
【0032】
その場合、デッドマンスイッチ18,20は、オーバーポジションからイネーブルポジションを通って復帰するが、この際に、確立されている禁止状態が一時的にせよ解除されることは好ましくない。
そこで、デッドマンスイッチ18,20のノブ18a,20aの両方が完全に非操作ポジションに動かされたことが確認されるまで、操作禁止状態を維持して、確認できた後に定常状態へ復帰させるようにすることが好ましい。
本発明では、図2に示すリレー回路により、操作禁止状態を維持する安全な装置を提供する。例えば、デッドマンスイッチ18が操作された場合、まず、ノブ18aの押下により、リリース検出用の接点28aが開(OFF)となる。そのままオーバーポジションまで動かされると、3ポジション検出用の第2接点29aが開いて、ライン34を通る電流を遮断する。そのため、電磁リレー35が消磁して、リレー接点35a,35b,35cが開(OFF)状態となる。これに伴って、電磁リレー35の自己保持回路が無くなるとともに、デッドマンスイッチ出力ライン21,22が遮断される。こうしてティーチペンダント10の操作禁止状態が確立され、すなわち、教示対象機器の操作が禁止される。
次に、デッドマンスイッチ18のノブ18aを戻していった場合、まず3ポジション検出用の第2接点29aが閉(ON)となる。この状態では、リリース検出用の接点28aはまだ開(OFF)状態であり、電磁リレー35には電流が供給されず、OFF状態を保持する。操作禁止状態は、操作者がデッドマンスイッチ18のノブ18aを離し、リリース検出用の接点28aが閉(ON)するまで、継続する。このように、操作禁止状態からの復帰作業に教示作業者の意図的な操作を要するようにすることで、全体的な安全性がより向上する。
【0033】
以上、本発明の実施例を説明したが、本発明はこの特定の実施例のみに限定されるものではなく、添付する特許請求の範囲の記載内で、説明した形態に種々の変更を加えることができ、あるいは本発明が他の形態を採ることも可能である。
例えば、実施例における検出回路32の電磁リレー35として安全リレーを用いることにより、ティーチペンダントへの電源投入時にリレーの接点溶着の有無を検出し、溶着を検出した場合には、ティーチペンダントの動作を禁止することも可能である。
【図面の簡単な説明】
【0034】
【図1】本発明の実施例によるティーチペンダント(教示装置)の外観図であり、(a)は表面側を、(b)は裏面側を示している。
【図2】図1のティーチペンダントの操作状況を判別して、その操作の許容・禁止を設定するための回路構成を示す説明図である。
【符号の説明】
【0035】
10 ティーチペンダント(教示装置)
18,20 デッドマンスイッチ(3ポジションスイッチ)
21,22 デッドマンスイッチ出力ライン
24a,24b イネーブル接点
26a,26b イネーブル接点
28a 第1接点
29a 第2接点
30a 第3接点
31a 第4接点
32 検出回路
35 電磁リレー
35a 第5リレー接点
35b 第6リレー接点
35c 第7リレー接点
【特許請求の範囲】
【請求項1】
NC工作機械を含むロボット機器に所要動作を教示するための教示装置であって、この装置の操作を規制する制御手段を有し、制御手段は、各々が押下ストロークの所定範囲をイネーブルポジションに、イネーブルポジションより押下ストロークの少ない範囲を非操作ポジションに、イネーブルポジションより押下ストロークの多い範囲をオーバーポジションにした第1と第2の3ポジションスイッチと、これらスイッチの押下操作が行われたか否かを個別に検出する検出手段とを含み、少なくとも一方のスイッチがイネーブルポジションにある場合に装置の操作を許容し、双方のスイッチが非操作ポジションまたはオーバーポジションにある場合に装置の操作を禁止する教示装置において、
前記検出手段は、少なくとも一方のスイッチがオーバーポジションにある場合に、双方のスイッチの操作を無効にして装置の操作を禁止することを特徴とする教示装置。
【請求項2】
請求項1記載の装置において、前記検出手段は、第1のスイッチの押下で開く第1および第2接点と、第2のスイッチの押下で開く第3および第4接点と、これらスイッチの操作を個別に無効にする第6および第7リレー接点を備えた電磁リレーとを含み、これら第1、第3、第2、第4および電磁リレーのコイルを直列に電源に接続するとともに、電磁リレーの第5リレー接点を第1および第3接点と並列に電源に接続する電気回路を構成し、双方のスイッチの非押下で電磁リレーを作動させて第5リレー接点を閉ざすことにより電磁リレーの自己保持回路を形成し、少なくとも一方のスイッチのオーバーポジションへの押下により電磁リレーの自己保持回路を解除し、第6と第7リレー接点を開いて双方のスイッチの操作を無効にする、教示装置。
【請求項3】
請求項1または2に記載の装置において、前記制御手段は、少なくとも一方のスイッチがオーバーポジションにあって、前記検出手段が装置の操作を禁止すると、第1と第2のスイッチの双方が非操作ポジションに戻されるまで、装置の操作禁止状態を維持する、教示装置。
【請求項4】
NC工作機械を含むロボット機器に所要動作を教示するための教示装置の操作を規制する制御方法であって、各々が押下ストロークの所定範囲をイネーブルポジションに、イネーブルポジションより押下ストロークの少ない範囲を非操作ポジションに、イネーブルポジションより押下ストロークの多い範囲をオーバーポジションにした第1と第2の3ポジションスイッチを設けて、少なくとも一方のスイッチがイネーブルポジションにある場合に装置の操作を許容し、双方のスイッチが非操作ポジションまたはオーバーポジションにある場合に装置の操作を禁止する制御方法において、
前記第1と第2のスイッチの押下操作が行われたか否かを個別に検出し、少なくとも一方のスイッチがオーバーポジションにある場合に、双方のスイッチの操作を無効にして装置の操作を禁止することを特徴とする制御方法。
【請求項5】
請求項4に記載の方法であって、少なくとも一方のスイッチがオーバーポジションにあって装置の操作を禁止した後、第1と第2のスイッチの双方が非操作ポジションに戻されるまで装置の操作禁止状態を維持する、制御方法。
【請求項1】
NC工作機械を含むロボット機器に所要動作を教示するための教示装置であって、この装置の操作を規制する制御手段を有し、制御手段は、各々が押下ストロークの所定範囲をイネーブルポジションに、イネーブルポジションより押下ストロークの少ない範囲を非操作ポジションに、イネーブルポジションより押下ストロークの多い範囲をオーバーポジションにした第1と第2の3ポジションスイッチと、これらスイッチの押下操作が行われたか否かを個別に検出する検出手段とを含み、少なくとも一方のスイッチがイネーブルポジションにある場合に装置の操作を許容し、双方のスイッチが非操作ポジションまたはオーバーポジションにある場合に装置の操作を禁止する教示装置において、
前記検出手段は、少なくとも一方のスイッチがオーバーポジションにある場合に、双方のスイッチの操作を無効にして装置の操作を禁止することを特徴とする教示装置。
【請求項2】
請求項1記載の装置において、前記検出手段は、第1のスイッチの押下で開く第1および第2接点と、第2のスイッチの押下で開く第3および第4接点と、これらスイッチの操作を個別に無効にする第6および第7リレー接点を備えた電磁リレーとを含み、これら第1、第3、第2、第4および電磁リレーのコイルを直列に電源に接続するとともに、電磁リレーの第5リレー接点を第1および第3接点と並列に電源に接続する電気回路を構成し、双方のスイッチの非押下で電磁リレーを作動させて第5リレー接点を閉ざすことにより電磁リレーの自己保持回路を形成し、少なくとも一方のスイッチのオーバーポジションへの押下により電磁リレーの自己保持回路を解除し、第6と第7リレー接点を開いて双方のスイッチの操作を無効にする、教示装置。
【請求項3】
請求項1または2に記載の装置において、前記制御手段は、少なくとも一方のスイッチがオーバーポジションにあって、前記検出手段が装置の操作を禁止すると、第1と第2のスイッチの双方が非操作ポジションに戻されるまで、装置の操作禁止状態を維持する、教示装置。
【請求項4】
NC工作機械を含むロボット機器に所要動作を教示するための教示装置の操作を規制する制御方法であって、各々が押下ストロークの所定範囲をイネーブルポジションに、イネーブルポジションより押下ストロークの少ない範囲を非操作ポジションに、イネーブルポジションより押下ストロークの多い範囲をオーバーポジションにした第1と第2の3ポジションスイッチを設けて、少なくとも一方のスイッチがイネーブルポジションにある場合に装置の操作を許容し、双方のスイッチが非操作ポジションまたはオーバーポジションにある場合に装置の操作を禁止する制御方法において、
前記第1と第2のスイッチの押下操作が行われたか否かを個別に検出し、少なくとも一方のスイッチがオーバーポジションにある場合に、双方のスイッチの操作を無効にして装置の操作を禁止することを特徴とする制御方法。
【請求項5】
請求項4に記載の方法であって、少なくとも一方のスイッチがオーバーポジションにあって装置の操作を禁止した後、第1と第2のスイッチの双方が非操作ポジションに戻されるまで装置の操作禁止状態を維持する、制御方法。
【図1】



【図2】
【図2】
【公開番号】特開2006−167884(P2006−167884A)
【公開日】平成18年6月29日(2006.6.29)
【国際特許分類】
【出願番号】特願2004−365777(P2004−365777)
【出願日】平成16年12月17日(2004.12.17)
【出願人】(000005197)株式会社不二越 (625)
【出願人】(000000262)株式会社ダイヘン (990)
【Fターム(参考)】
【公開日】平成18年6月29日(2006.6.29)
【国際特許分類】
【出願日】平成16年12月17日(2004.12.17)
【出願人】(000005197)株式会社不二越 (625)
【出願人】(000000262)株式会社ダイヘン (990)
【Fターム(参考)】
[ Back to top ]