
ロボット歩行装置
【課題】構造が簡便で製造費が安価で且つ堅牢な、競走競技に適した歩行ロボットを提供する。
【解決手段】ロボット走行装置は、胴体と、1対の脚部と、前記脚部の下端部に装着された足裏部材と、前記1対の脚部を交互に走行させる駆動機構を有する。脚部は、ロボットの胴体の矢状面に対して垂直に配置された枢動軸回りに枢動可能に構成され、駆動機構は、遠隔操縦によって回転可能なモータと、該モータの軸に装着された回動板と、該回動板の両側に装着された1対の揺動軸と、を有する。
【解決手段】ロボット走行装置は、胴体と、1対の脚部と、前記脚部の下端部に装着された足裏部材と、前記1対の脚部を交互に走行させる駆動機構を有する。脚部は、ロボットの胴体の矢状面に対して垂直に配置された枢動軸回りに枢動可能に構成され、駆動機構は、遠隔操縦によって回転可能なモータと、該モータの軸に装着された回動板と、該回動板の両側に装着された1対の揺動軸と、を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は足を交互に動かせて走行するロボットに関し、特に、遠隔操縦によってロボットを走行させるロボット走行装置に関する。
【背景技術】
【0002】
従来、2本足を交互に動かせて走行するロボットが知られている。更に、2本の腕を前後に振りながら走行するロボットも知られている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】米国特許5224896号
【特許文献2】米国特許32676号
【特許文献3】米国特許1992477号
【特許文献4】米国特許6602106号
【特許文献5】米国特許5628668号
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来のロボットでは、単にモータの回転を、足の振り運動や、胴体や手の振り運動にそのまま変換する機構が設けられているだけである。したがって、歩行のパターンが一定であり、操縦者の指令を変えることで、進行方向を変えることができなかった。
【0005】
また、上述の特許文献に記載されているように、左右の脚の運動と胴体の傾きの運動の合計3自由度を計算機制御して歩行させるロボット教材も商品化されている。しかしながら、これらの例では、3自由度を計算機制御して歩行運動を生成するためのものであり、操縦者の指令によって、脚と胴体の運動を同期させることは容易ではない。そのため、これらのロボットは、操縦桿を遠隔から操作することによって歩行運動を生成する競走競技には適しない。
【0006】
そこで、本発明の目的は、構造が簡便で製造費が安価で且つ堅牢な、競走競技に適した歩行ロボットを提供することにある。
【課題を解決するための手段】
【0007】
本発明によると、ロボット走行装置は、胴体と、1対の脚部と、前記脚部の下端部に装着された足裏部材と、前記1対の脚部を交互に走行させる駆動機構を有する。
脚部は、ロボットの胴体の矢状面に対して垂直に配置された枢動軸回りに枢動可能に構成され、駆動機構は、遠隔操縦によって回転可能なモータと、該モータの軸に装着された回動板と、該回動板の両側に装着された1対の揺動軸と、を有し、該揺動軸は、前記脚部の上端に係合され、前記モータによって、前記回動板を、交互に反対方向に所定の回転角だけ回転させることによって、前記1対の揺動軸は交互に反対方向に揺動し、それによって、前記1対の脚部は、交互に反対方向に前記枢動軸回りに枢動することによって、前記足裏部材が前記前後方向に交互に移動するように構成されている。
本発明によると、操縦者が遠隔にある操縦桿によって、1つのモータ駆動系の軸が生成する「往復揺動運動」を、ロボットに指令することによって、そのロボットの歩行の速度制御と、推進方向を定める操舵制御をすることが可能である。
本発明によると、1つの自由度の「往復運動」によって、歩行の速度制御と、方向を定める操舵制御をすることができる。
操縦者は、操縦対象のロボットに、1つの自由度の「往復運動」を指令するだけで、速度制御と操舵制御が可能である。
【発明の効果】
【0008】
本発明によると、構造が簡便で製造費が安価で且つ堅牢な、競走競技に適した歩行ロボットを提供することができる。
本発明によると、操縦桿の振り運動の与え方次第で、推進速度や推進方向が制御できるため、操縦者の熟練の度合いを、歩行運動に反映させることができる。そのため、複数のロボットによる競走なども行うことができるし、また、操縦を楽しめる。
【図面の簡単な説明】
【0009】
【図1A】本発明によるロボット装置の第1の例の背面構成を示す図である。
【図1B】本発明によるロボット装置の第1の例の右側の側面構成を示す図である。
【図2】本発明によるロボット装置の第1の例の主要部の構成を示す図である。
【図3A】本発明によるロボット装置の第2の例の背面構成を示す図である。
【図3B】本発明によるロボット装置の第2の例の右側の側面構成を示す図である。
【図4】本発明によるロボット装置の第2の例の主要部の構成を示す図である。
【図5】本発明によるロボット装置の第2の例の駆動機構の構成を示す図である。
【図6A】本発明によるロボット装置の第2の例の駆動機構の動作を説明する説明図である。
【図6B】本発明によるロボット装置の第2の例の駆動機構の動作を説明する説明図である。
【図6C】本発明によるロボット装置の第2の例の駆動機構の動作を説明する説明図である。
【図7A】本発明によるロボット装置の第3の例の背面構成を示す図である。
【図7B】本発明によるロボット装置の第3の例の右側の側面構成を示す図である。
【図8A】本発明によるロボット装置が中立状態の姿勢にある場合の右側の側面構成を示す図である。
【図8B】本発明によるロボット装置が中立状態の姿勢にある場合の正面構成を示す図である。
【図9A】本発明によるロボット装置が右側の脚部によって荷重を支えている場合の右側の側面構成を示す図である。
【図9B】本発明によるロボット装置が右側の脚部によって荷重を支えている場合の正面構成を示す図である。
【図10A】本発明によるロボット装置が右側の脚部によって荷重を支えている場合の右側の側面構成を示す図である。
【図10B】本発明によるロボット装置が右側の脚部によって荷重を支えている場合の正面構成を示す図である。
【図11A】本発明によるロボット装置が右側の脚部によって荷重を支えている場合の右側の側面構成を示す図である。
【図11B】本発明によるロボット装置が右側の脚部によって荷重を支えている場合の正面構成を示す図である。
【発明を実施するための形態】
【0010】
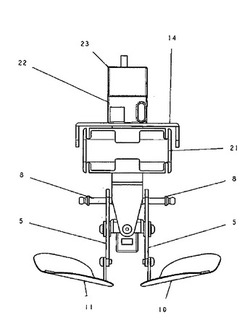
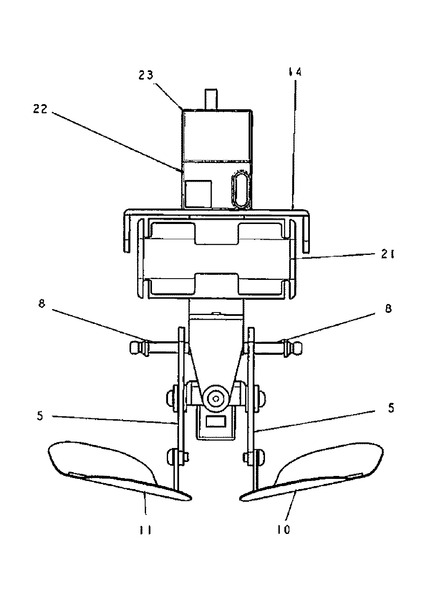
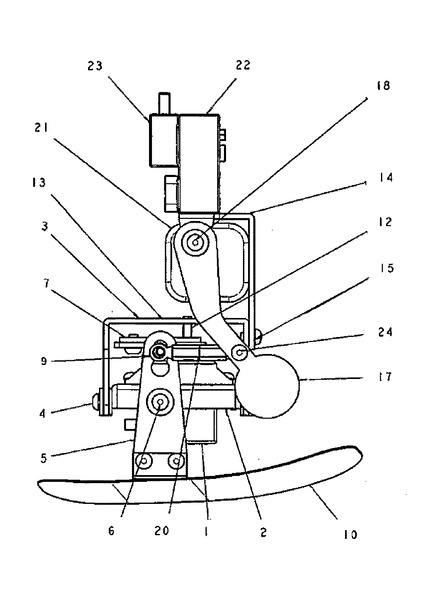
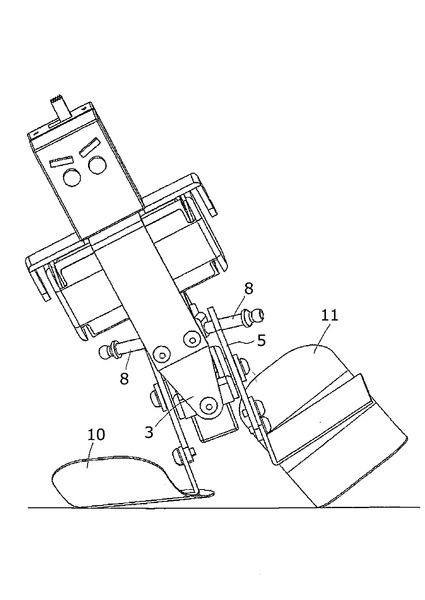
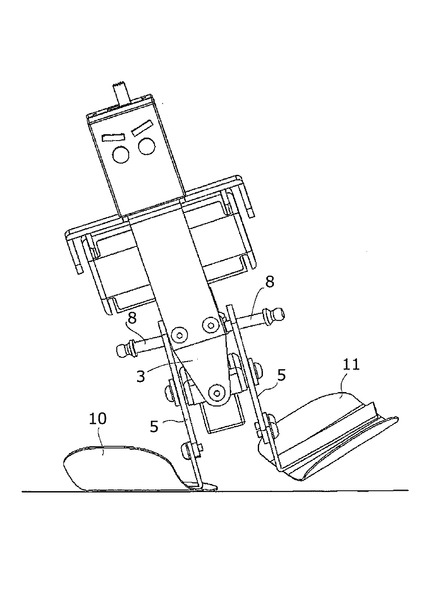
図1A及び図1Bを参照して本発明のロボット歩行装置の第1の例を説明する。本例のロボット歩行装置は、モータ1と、モータ1を支持する支持部材2と、支持部材2の前後両側に設けられた軸4に取り付けられた腰部材3と、支持部材2の左右両側に設けられた軸6回りに枢動可能に取り付けられた左右1対の脚部5を有する。脚部5の上部には、長穴9が形成されている。脚部5の長穴9には、揺動軸8が貫通している。脚部5の下端には、足裏部材10、11が装着されている。
【0011】
支持部材2はモータ1を囲むように矩形フレーム部材によって形成されてよい。腰部材3は、コの字形フレーム部材によって形成されてよい。腰部材3はロボットの矢状面(sagittal plane)に沿って配置されている。揺動軸8は、ロボットの矢状面に垂直に配置されている、即ち、ロボットの前額面(frontal plane)に沿って配置されている。
【0012】
腰部材3には垂直部材14がネジ15で固定されている。垂直部材14にはバッテリ21が装着されている。垂直部材14の上側には通信用モデム22とスイッチ23が取り付けられている。通信モデム22は、ジョイスティック型コントローラからの命令を受信する。
【0013】
通信モデム22とスイッチ23はロボットの頭部を構成する。通信モデム22の前面には、ロボットの顔が形成されてよい。腰部材3、垂直部材14及びバッテリ21はロボットの上体部を構成する。
【0014】
本例のロボット走行装置によると、モータ1の回転軸は、ロボットの矢状面上に配置されている。本例のロボット走行装置は、ロボットの矢状面に対して左右対称的な構造を有し、左半分と右半分は同一の荷重を有する。従って、ロボットが中立状態の姿勢にあるとき、ロボットの重心は、矢状面上にある。
【0015】
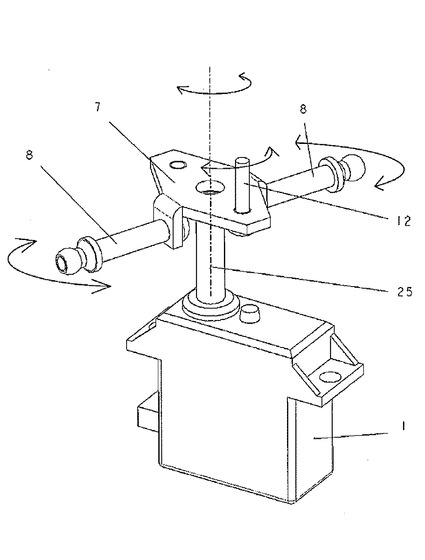
図2を参照して、脚部5の駆動機構を説明する。本例では、モータ1の回転軸25は上向きである。即ち、モータ1の上面より回転軸25が突出している。モータ1の回転軸25には、回動板7が取り付けられている。回動板7から、左右両側に揺動軸8が延びている。回動板7と回転軸25の構造の詳細は後に図4を参照して説明する。
【0016】
ロボットを歩行させるとき、モータ1の回転軸25を、時計方向と半時計方向に交互に回転させる。モータ1の回転軸25の回転角度は、通常の歩行では、0より大きく45度より小さい。例えば、10度より大きく30度より小さくてよい。例えば、約24〜25度であってよい。
【0017】
モータ1の回転軸25に装着された回動板7も、同様に、時計方向と半時計方向に交互に回転する。それによって、回動板7の両側の揺動軸8は前後方向に振られる。揺動軸8の振りは、左右で逆位相である。例えば、左側の揺動軸8が前方に振られると、右側の揺動軸8は後方に振られる。揺動軸8が前後方向に振られると、左右の脚部5は逆位相で前後に振れる。例えば、左側の揺動軸8が前方に振られると、左の脚部5は後方に移動し、右側の揺動軸8が後方に振られると、右の脚部5は前方に移動する。脚部5の枢動角は、例えば、10〜30度、好ましくは、15〜20度である。
【0018】
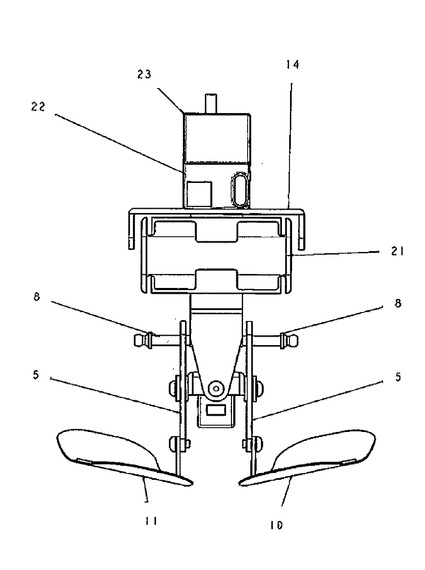
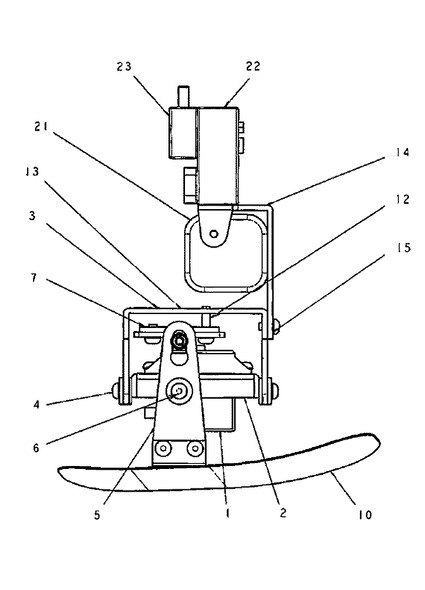
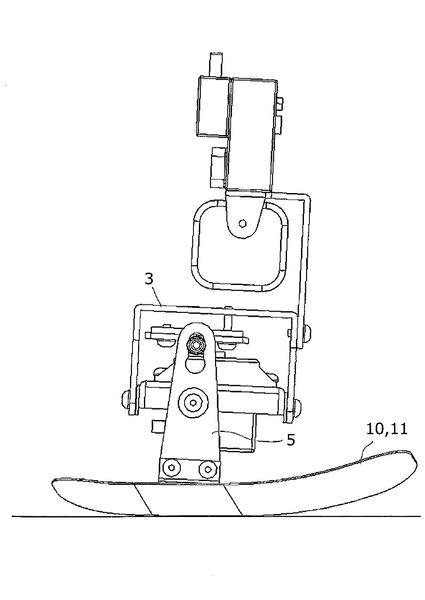
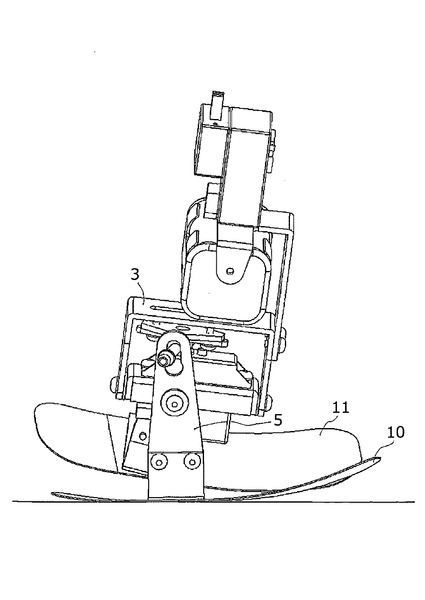
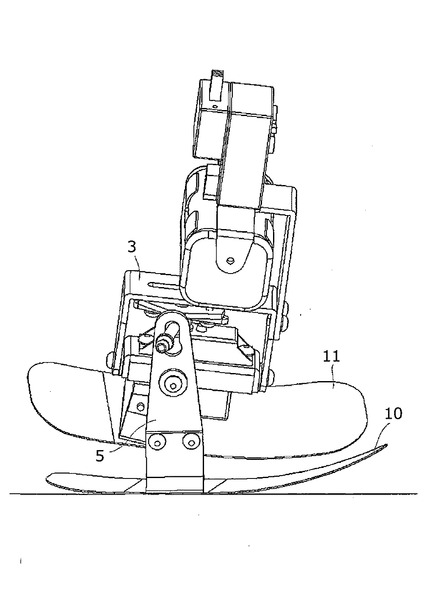
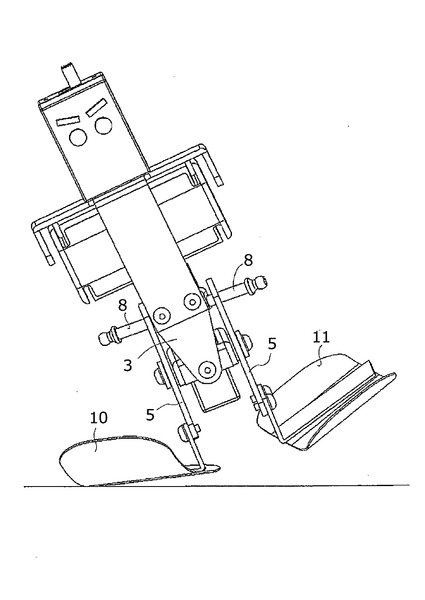
図3A及び図3Bを参照して本発明のロボット歩行装置の第2の例を説明する。上述の第1の例では、左右の脚部5は前後に揺動するように構成されている。本例では、更に、上体が左右に振れるように構成されている。ここでは、第1の例と共通の構成については、説明を省略する。第1の例とは異なる部分について説明する。本例によると、腰部材3は、支持部材2の前後両側に設けられた軸4回りに枢動可能である。腰部材3が軸4回りに搖動すると、垂直部材14、バッテリ21、通信用モデム22及びスイッチ23は、腰部材3と共に軸4回りに搖動する、即ち、左右に揺れる。
【0019】
回動板7の上面には偏奇軸12が突出するように設けられている。偏奇軸12は、モータ1の回転軸25に平行であるが、モータ1の回転軸25に対して偏奇している。
【0020】
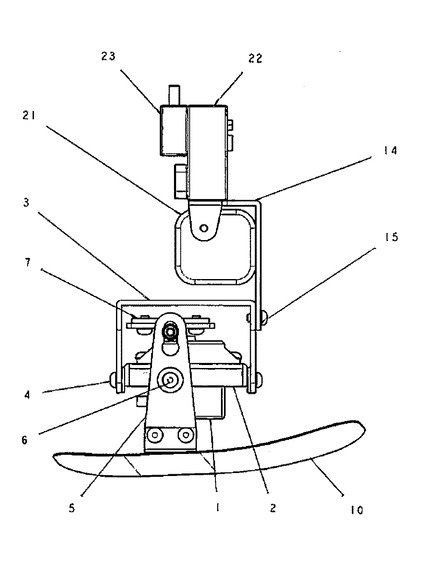
図4を参照して、脚部5の駆動機構を説明する。ここでは、第1の例と共通の構成については、説明を省略する。腰部材3の上側部材に長穴13が形成されている。長穴13は、ロボットの矢状面に沿った方向に長い形状を有する。回動板7の偏奇軸12は、腰部材3の長穴13を貫通している。
【0021】
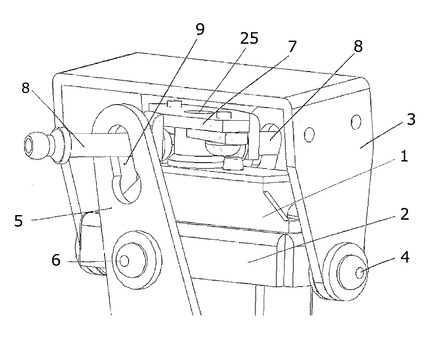
図5を参照して、回動板7の構造の例を説明する。モータ1の回転軸25には、回動板7が取り付けられている。ここでは、回転軸25の長さを誇張して描いている。回動板7から、左右両側に揺動軸8が延びている。図3A及び図3Bに示した第2の例では、回動板7の上面には偏奇軸12が突出するように設けられている。偏奇軸12は、回動板7の上面に、ロボットの進行方向前側に配置されている。図1A及び図1Bに示した第1の例では、偏奇軸12は設けられていない。
【0022】
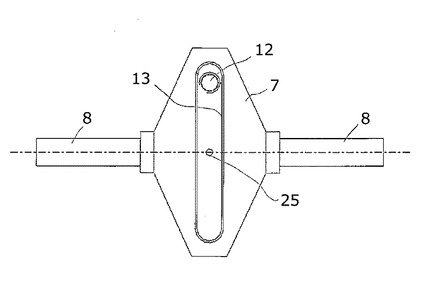
図6A、図6B及び図6Cを参照して、上体の揺動機構を説明する。図6Aに示すように、回動板7の上面に、モータ1の回転軸25に対して偏奇して偏奇軸12が設けられている。偏奇軸12は、回動板7の上面に、ロボットの進行方向の前側に配置され、腰部材3の長穴13に係合している。ここでは、腰部材3の長穴13の輪郭のみを描いている。偏奇軸12と腰部材3はカムとカムフォロワの関係にある。腰部材3の長穴13の開口は、ロボットの矢状面に沿って長く延びた形状を有する。
【0023】
図6Aは、ロボットが中立状態の姿勢にある場合を示す。回動板7の偏奇軸12とモータ1の回転軸25は、ロボットの矢状面に沿って1直線上に沿って配置されている。腰部材3の長穴13は、モータ1の回転軸25に整合している。回動板7の両側の揺動軸8は、ロボットの前額面に沿って配置されている。
【0024】
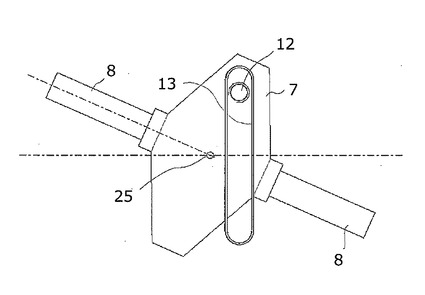
図6Bは、モータ1の回転軸25を所定の回転角θLだけ、時計方向に回転させた状態を示す。回動板7も時計方向に回転角θLだけ回転する。それによって、回動板7の偏奇軸12は、湾曲した軌道に沿って移動する。即ち、偏奇軸12は、モータ1の回転軸25に対して図の右側に横方向に移動する。偏奇軸12と腰部材3はカムとカムフォロワの関係にあるから、腰部材3は右側に横方向に相対的に移動する。従って、腰部材3は、支持部材2に設けられた軸4の回りに枢動する。腰部材3が枢動すると、上体は右側に揺れる。
【0025】
この状態では、回動板7の偏奇軸12とモータ1の回転軸25は、ロボットの矢状面に沿って1直線上に沿って配置されていない。
【0026】
回動板7の両側の揺動軸8も、時計方向に回転角θLだけ枢動する。左側の揺動軸8は前方に枢動し、右側の揺動軸8は後方に枢動する。このように、揺動軸8が前後に振れると、揺動軸8に接続された脚部5は枢動軸回りに枢動する。図1B及び図3Bに示したように、脚部5が枢動軸6回りに枢動すると、脚部5の下端に装着された足裏部材10、11が前後に移動する。足裏部材10、11は、枢動軸6に対して、揺動軸8と反対側にある。そのため、揺動軸8の前後方向の振れと、足裏部材10、11の前後方向の移動は同期的であるが位相は反対である。
【0027】
従って、図6Bに示すように、左側の揺動軸8が前方に枢動すると、左側の脚部5は、後方に移動する。左側の足裏部材11によって床を蹴ると、上体は右に傾き、右足によってロボットの荷重の大部分を支えることになる。
【0028】
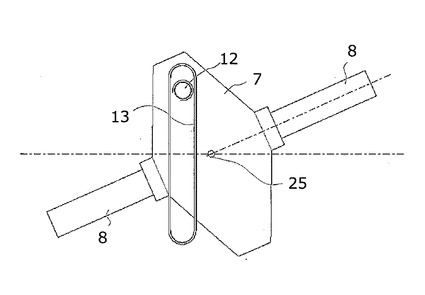
図6Cは、モータ1の回転軸25を所定の回転角θRだけ、反時計方向に回転させた状態を示す。回動板7も反時計方向に回転角θRだけ回転する。それによって、回動板7の偏奇軸12は、モータ1の回転軸25に対して図の左側に横方向に移動する。偏奇軸12と腰部材3はカムとカムフォロワの関係にあるから、腰部材3は左側に横方向に相対的に移動する。従って、腰部材3は、支持部材2に設けられた軸4の回りに枢動する。腰部材3が枢動すると、上体は左側に揺れる。
【0029】
この状態では、回動板7の偏奇軸12とモータ1の回転軸25は、ロボットの矢状面に沿って1直線上に沿って配置されていない。
【0030】
回動板7の両側の揺動軸8の枢動と、両側の脚部5及び足裏部材10、11の移動は、図6Bの場合と逆になる。こうして、本例では、モータ1の回転軸25を所定の回転角だけ回転させると、回動板7及び揺動軸8が揺動し、両側の脚部が枢動軸回りに枢動し、足裏部材10、11が移動する。モータ1の回転軸25の回転と、両側の足裏部材10、11の移動は同期する。尚、このとき、腰部材3は、支持部材2に設けられた軸4の回りに枢動するから、上体も左右に揺れるが、それについては、後に説明する。上体の枢動角は、5〜10度、好ましくは、5〜8度である。
【0031】
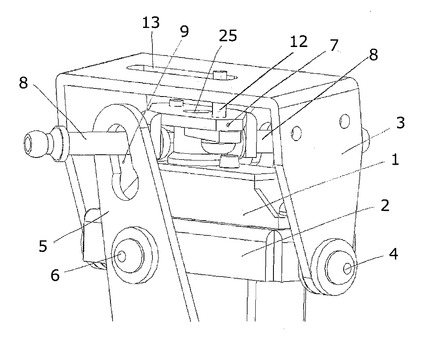
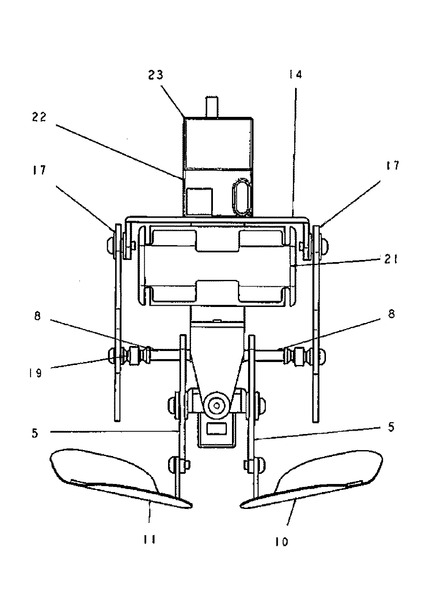
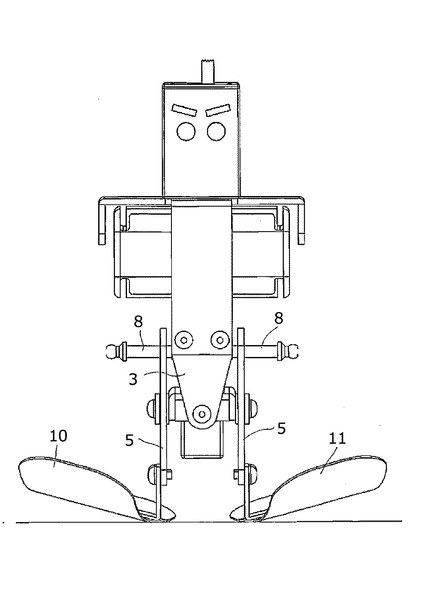
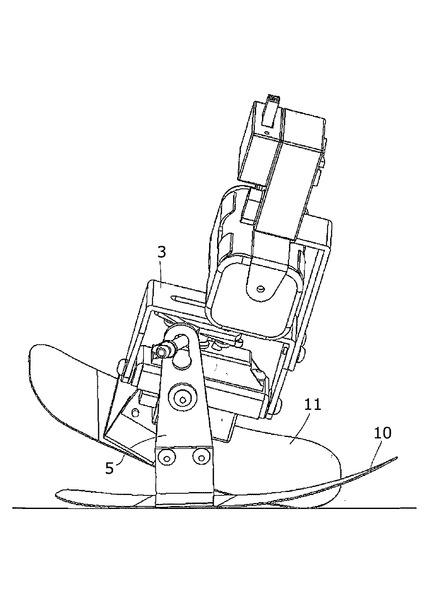
図7A及び図7Bを参照して本発明のロボット歩行装置の第3の例を説明する。上述の第2の例では、左右の脚部5が前後に枢動し、足裏部材10、11が前後に移動すると、上体が左右に振れるように構成されている。本例によると、更に、腕も前後に振るように構成されている。ここでは、第2の例と共通の構成については、説明を省略する。第2の例とは異なる部分について説明する。
【0032】
垂直部材14の両側には、1対の腕17が、軸18回りに枢動可能に装着されている。腕17と揺動軸8は、ロッド20によって連結されている。即ち、ロッドの一端19は、揺動軸8の先端に連結され、ロッドの他端24は、腕17の先端部付近に連結されている。こうして、ロッド20によって腕17と揺動軸8が連結されているため、腕17は揺動軸8の前後方向の振りと同位相で振られる。そのため、腕17は、脚部5の振りとは逆位相で前後に振られる。そのため、人間の歩行時と同様の腕の振り運動を実現する。本例では、腕17は、脚部5の振りとは逆位相で前後に振られるから、ロボットは安定的に走行する。
【0033】
図8A及び図8B、図9A及び図9B、図10A及び図10B、図11A及び図11Bを参照して、本発明のロボット歩行装置の第2の例の歩行を説明する。図8A、図9A、図10A及び図11Aは、右側の側面構成を示し、図8B、図9B、図10B及び図11Bは、正面構成を示す。図8A及び図8Bは、本発明のロボット歩行装置の第2の例が中立状態の姿勢である場合を示す。
【0034】
図9A及び図9Bは、右側の脚部(ロボットの進行方向に対して右側の脚部)を前方に移動させながら、左側の脚部が後方に移動する時の姿勢を示す。このとき、図6Bに示したように、回動板7の偏奇軸12によって、腰部材3の長穴13を駆動するため、腰部材3を含む上体は、枢動軸4回りに枢動し、右側に傾斜する。それと同時に、左側の足裏部材11の指先の内側が床に接して、上体を右側に傾斜させる。こうして上体は右側に傾斜する。この過程で、右側の脚部は胴体に対して前方に振られるが、右側の足裏部材10は接地しているため、地面に対しては動かない。その結果、胴体が前傾する。また、左側の脚部は胴体の後ろ側に振られる。
【0035】
図10A及び図10Bは、このような動作によって、左側の脚部が地面より浮き上がった状態を示す。この状態になると、胴体はモータによって能動的に左に傾いていくと同時に、右側の足裏部材10の外側で支えている状態なので、それによって、胴体は左に傾斜する。
【0036】
図11A及び図11Bは、上体が、右側に最大に傾斜した状態を示す。この状態では、ロボットの荷重を、右側の足裏部材10の右側の側面のみで支持している。このとき、右側の足裏部材10が(上から見て)外側にVの字に広がっており、また上体が前方に振られる動的効果で、ロボット全体は、右側の足裏部材10の前方外側の接地点を中心に回転し若干前方に移動する。
【0037】
その後、ロボットは図8A及び図8Bに示す中立状態の姿勢に戻り、今度は左方向に同様な動作を行う。それによってロボット全体は前進する。このような動作を繰り返すことで、ロボットは前進運動を行う。
【0038】
ここでは、本発明のロボット走行装置の第2の例の動作を説明したが、第1の例及び第3の例の動作も同様である。
【0039】
本発明によると、遠隔操作する操縦桿の左右の動きに同期してモータ1の回転軸25が左右への往復回転を繰り返し、それに同期して、左右の脚部の運動が生成される。即ち、左右の脚部の運動は、操縦桿の左右の動きに同期している。従って、操縦桿の動きを好適に制御することにより、脚部の走行を自由に変更することができる。そのため、ロボットの進行方向及び走行速度を自由に制御することができる。
【0040】
例えば、操縦桿を左に振らすスピードと右に振らすスピードが異なると、それに応じて、左右の脚部の運動速度が互いに異なるように変化する。こうして、片側の脚部に重心が載って、その後その重心が逆側の脚部に乗る運動の左右への動き方が変わり、足裏が地面を押し付ける動的な効果が左右の脚部で異なることになる。こうして、左右の脚部による立脚状態での推進距離が異なることとなり、進行方向を自在に操縦することができる。操縦桿の振り速度を変化させることにより、歩行速度も変化させることができる。
【0041】
本発明によると、ロボットが推進できる原理は、脚部の振りと胴体の移動が足裏を地面に押し付けて跳ね返る動的な運動の効果を利用したものである。歩行運動を有効に生成するには、足裏部材10、11の形状と材質を適切に設定することが不可欠である。足裏部材10、11の形状としては、上体部の左右と前後の揺動でも転倒しない程度の広さを持ち、細長くて足先がVの字型に広がっているものがよい。このような形状だと、上体の重心を支持する面積が広く、また脚部の後ろへの振り上げ時に、適度に床を蹴りながら、長めの足裏が床面に接触し難い。また足裏の材質としては適度の弾性と摩擦係数の高さがあるのが望ましい。実際にはウレタンフォームなどを使用するのが適する。
【0042】
上述の例では、モータの回転軸は上を向いているが、これに限定されず、矢状面にその軸が含まれれば、垂直でも水平でもよい。それぞれ適当なリンク系を導入することによって、脚部の振り運動、あるいはそれに付随して胴体の左右の振り運動、さらに腕の振り運動を生成する構成でもよい。
【0043】
以上本発明の例を説明したが本発明は上述の例に限定されるものではなく、特許請求の範囲に記載された発明の範囲にて様々な変更が可能であることは、当業者によって容易に理解されよう。
【符号の説明】
【0044】
1…モータ、2…支持部材、3…腰部材、4…軸、5…脚部、6…軸、7…回動板、8…揺動軸、9…長穴、10、11…足裏部材、12…偏奇軸、13…長穴、14…垂直部材、15…ネジ、17…腕、18…軸、19…ロッドの端、20…ロッド、21…バッテリ、22…通信用モデム、23…スイッチ、24…ロッドの端、25…回転軸
【技術分野】
【0001】
本発明は足を交互に動かせて走行するロボットに関し、特に、遠隔操縦によってロボットを走行させるロボット走行装置に関する。
【背景技術】
【0002】
従来、2本足を交互に動かせて走行するロボットが知られている。更に、2本の腕を前後に振りながら走行するロボットも知られている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】米国特許5224896号
【特許文献2】米国特許32676号
【特許文献3】米国特許1992477号
【特許文献4】米国特許6602106号
【特許文献5】米国特許5628668号
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来のロボットでは、単にモータの回転を、足の振り運動や、胴体や手の振り運動にそのまま変換する機構が設けられているだけである。したがって、歩行のパターンが一定であり、操縦者の指令を変えることで、進行方向を変えることができなかった。
【0005】
また、上述の特許文献に記載されているように、左右の脚の運動と胴体の傾きの運動の合計3自由度を計算機制御して歩行させるロボット教材も商品化されている。しかしながら、これらの例では、3自由度を計算機制御して歩行運動を生成するためのものであり、操縦者の指令によって、脚と胴体の運動を同期させることは容易ではない。そのため、これらのロボットは、操縦桿を遠隔から操作することによって歩行運動を生成する競走競技には適しない。
【0006】
そこで、本発明の目的は、構造が簡便で製造費が安価で且つ堅牢な、競走競技に適した歩行ロボットを提供することにある。
【課題を解決するための手段】
【0007】
本発明によると、ロボット走行装置は、胴体と、1対の脚部と、前記脚部の下端部に装着された足裏部材と、前記1対の脚部を交互に走行させる駆動機構を有する。
脚部は、ロボットの胴体の矢状面に対して垂直に配置された枢動軸回りに枢動可能に構成され、駆動機構は、遠隔操縦によって回転可能なモータと、該モータの軸に装着された回動板と、該回動板の両側に装着された1対の揺動軸と、を有し、該揺動軸は、前記脚部の上端に係合され、前記モータによって、前記回動板を、交互に反対方向に所定の回転角だけ回転させることによって、前記1対の揺動軸は交互に反対方向に揺動し、それによって、前記1対の脚部は、交互に反対方向に前記枢動軸回りに枢動することによって、前記足裏部材が前記前後方向に交互に移動するように構成されている。
本発明によると、操縦者が遠隔にある操縦桿によって、1つのモータ駆動系の軸が生成する「往復揺動運動」を、ロボットに指令することによって、そのロボットの歩行の速度制御と、推進方向を定める操舵制御をすることが可能である。
本発明によると、1つの自由度の「往復運動」によって、歩行の速度制御と、方向を定める操舵制御をすることができる。
操縦者は、操縦対象のロボットに、1つの自由度の「往復運動」を指令するだけで、速度制御と操舵制御が可能である。
【発明の効果】
【0008】
本発明によると、構造が簡便で製造費が安価で且つ堅牢な、競走競技に適した歩行ロボットを提供することができる。
本発明によると、操縦桿の振り運動の与え方次第で、推進速度や推進方向が制御できるため、操縦者の熟練の度合いを、歩行運動に反映させることができる。そのため、複数のロボットによる競走なども行うことができるし、また、操縦を楽しめる。
【図面の簡単な説明】
【0009】
【図1A】本発明によるロボット装置の第1の例の背面構成を示す図である。
【図1B】本発明によるロボット装置の第1の例の右側の側面構成を示す図である。
【図2】本発明によるロボット装置の第1の例の主要部の構成を示す図である。
【図3A】本発明によるロボット装置の第2の例の背面構成を示す図である。
【図3B】本発明によるロボット装置の第2の例の右側の側面構成を示す図である。
【図4】本発明によるロボット装置の第2の例の主要部の構成を示す図である。
【図5】本発明によるロボット装置の第2の例の駆動機構の構成を示す図である。
【図6A】本発明によるロボット装置の第2の例の駆動機構の動作を説明する説明図である。
【図6B】本発明によるロボット装置の第2の例の駆動機構の動作を説明する説明図である。
【図6C】本発明によるロボット装置の第2の例の駆動機構の動作を説明する説明図である。
【図7A】本発明によるロボット装置の第3の例の背面構成を示す図である。
【図7B】本発明によるロボット装置の第3の例の右側の側面構成を示す図である。
【図8A】本発明によるロボット装置が中立状態の姿勢にある場合の右側の側面構成を示す図である。
【図8B】本発明によるロボット装置が中立状態の姿勢にある場合の正面構成を示す図である。
【図9A】本発明によるロボット装置が右側の脚部によって荷重を支えている場合の右側の側面構成を示す図である。
【図9B】本発明によるロボット装置が右側の脚部によって荷重を支えている場合の正面構成を示す図である。
【図10A】本発明によるロボット装置が右側の脚部によって荷重を支えている場合の右側の側面構成を示す図である。
【図10B】本発明によるロボット装置が右側の脚部によって荷重を支えている場合の正面構成を示す図である。
【図11A】本発明によるロボット装置が右側の脚部によって荷重を支えている場合の右側の側面構成を示す図である。
【図11B】本発明によるロボット装置が右側の脚部によって荷重を支えている場合の正面構成を示す図である。
【発明を実施するための形態】
【0010】
図1A及び図1Bを参照して本発明のロボット歩行装置の第1の例を説明する。本例のロボット歩行装置は、モータ1と、モータ1を支持する支持部材2と、支持部材2の前後両側に設けられた軸4に取り付けられた腰部材3と、支持部材2の左右両側に設けられた軸6回りに枢動可能に取り付けられた左右1対の脚部5を有する。脚部5の上部には、長穴9が形成されている。脚部5の長穴9には、揺動軸8が貫通している。脚部5の下端には、足裏部材10、11が装着されている。
【0011】
支持部材2はモータ1を囲むように矩形フレーム部材によって形成されてよい。腰部材3は、コの字形フレーム部材によって形成されてよい。腰部材3はロボットの矢状面(sagittal plane)に沿って配置されている。揺動軸8は、ロボットの矢状面に垂直に配置されている、即ち、ロボットの前額面(frontal plane)に沿って配置されている。
【0012】
腰部材3には垂直部材14がネジ15で固定されている。垂直部材14にはバッテリ21が装着されている。垂直部材14の上側には通信用モデム22とスイッチ23が取り付けられている。通信モデム22は、ジョイスティック型コントローラからの命令を受信する。
【0013】
通信モデム22とスイッチ23はロボットの頭部を構成する。通信モデム22の前面には、ロボットの顔が形成されてよい。腰部材3、垂直部材14及びバッテリ21はロボットの上体部を構成する。
【0014】
本例のロボット走行装置によると、モータ1の回転軸は、ロボットの矢状面上に配置されている。本例のロボット走行装置は、ロボットの矢状面に対して左右対称的な構造を有し、左半分と右半分は同一の荷重を有する。従って、ロボットが中立状態の姿勢にあるとき、ロボットの重心は、矢状面上にある。
【0015】
図2を参照して、脚部5の駆動機構を説明する。本例では、モータ1の回転軸25は上向きである。即ち、モータ1の上面より回転軸25が突出している。モータ1の回転軸25には、回動板7が取り付けられている。回動板7から、左右両側に揺動軸8が延びている。回動板7と回転軸25の構造の詳細は後に図4を参照して説明する。
【0016】
ロボットを歩行させるとき、モータ1の回転軸25を、時計方向と半時計方向に交互に回転させる。モータ1の回転軸25の回転角度は、通常の歩行では、0より大きく45度より小さい。例えば、10度より大きく30度より小さくてよい。例えば、約24〜25度であってよい。
【0017】
モータ1の回転軸25に装着された回動板7も、同様に、時計方向と半時計方向に交互に回転する。それによって、回動板7の両側の揺動軸8は前後方向に振られる。揺動軸8の振りは、左右で逆位相である。例えば、左側の揺動軸8が前方に振られると、右側の揺動軸8は後方に振られる。揺動軸8が前後方向に振られると、左右の脚部5は逆位相で前後に振れる。例えば、左側の揺動軸8が前方に振られると、左の脚部5は後方に移動し、右側の揺動軸8が後方に振られると、右の脚部5は前方に移動する。脚部5の枢動角は、例えば、10〜30度、好ましくは、15〜20度である。
【0018】
図3A及び図3Bを参照して本発明のロボット歩行装置の第2の例を説明する。上述の第1の例では、左右の脚部5は前後に揺動するように構成されている。本例では、更に、上体が左右に振れるように構成されている。ここでは、第1の例と共通の構成については、説明を省略する。第1の例とは異なる部分について説明する。本例によると、腰部材3は、支持部材2の前後両側に設けられた軸4回りに枢動可能である。腰部材3が軸4回りに搖動すると、垂直部材14、バッテリ21、通信用モデム22及びスイッチ23は、腰部材3と共に軸4回りに搖動する、即ち、左右に揺れる。
【0019】
回動板7の上面には偏奇軸12が突出するように設けられている。偏奇軸12は、モータ1の回転軸25に平行であるが、モータ1の回転軸25に対して偏奇している。
【0020】
図4を参照して、脚部5の駆動機構を説明する。ここでは、第1の例と共通の構成については、説明を省略する。腰部材3の上側部材に長穴13が形成されている。長穴13は、ロボットの矢状面に沿った方向に長い形状を有する。回動板7の偏奇軸12は、腰部材3の長穴13を貫通している。
【0021】
図5を参照して、回動板7の構造の例を説明する。モータ1の回転軸25には、回動板7が取り付けられている。ここでは、回転軸25の長さを誇張して描いている。回動板7から、左右両側に揺動軸8が延びている。図3A及び図3Bに示した第2の例では、回動板7の上面には偏奇軸12が突出するように設けられている。偏奇軸12は、回動板7の上面に、ロボットの進行方向前側に配置されている。図1A及び図1Bに示した第1の例では、偏奇軸12は設けられていない。
【0022】
図6A、図6B及び図6Cを参照して、上体の揺動機構を説明する。図6Aに示すように、回動板7の上面に、モータ1の回転軸25に対して偏奇して偏奇軸12が設けられている。偏奇軸12は、回動板7の上面に、ロボットの進行方向の前側に配置され、腰部材3の長穴13に係合している。ここでは、腰部材3の長穴13の輪郭のみを描いている。偏奇軸12と腰部材3はカムとカムフォロワの関係にある。腰部材3の長穴13の開口は、ロボットの矢状面に沿って長く延びた形状を有する。
【0023】
図6Aは、ロボットが中立状態の姿勢にある場合を示す。回動板7の偏奇軸12とモータ1の回転軸25は、ロボットの矢状面に沿って1直線上に沿って配置されている。腰部材3の長穴13は、モータ1の回転軸25に整合している。回動板7の両側の揺動軸8は、ロボットの前額面に沿って配置されている。
【0024】
図6Bは、モータ1の回転軸25を所定の回転角θLだけ、時計方向に回転させた状態を示す。回動板7も時計方向に回転角θLだけ回転する。それによって、回動板7の偏奇軸12は、湾曲した軌道に沿って移動する。即ち、偏奇軸12は、モータ1の回転軸25に対して図の右側に横方向に移動する。偏奇軸12と腰部材3はカムとカムフォロワの関係にあるから、腰部材3は右側に横方向に相対的に移動する。従って、腰部材3は、支持部材2に設けられた軸4の回りに枢動する。腰部材3が枢動すると、上体は右側に揺れる。
【0025】
この状態では、回動板7の偏奇軸12とモータ1の回転軸25は、ロボットの矢状面に沿って1直線上に沿って配置されていない。
【0026】
回動板7の両側の揺動軸8も、時計方向に回転角θLだけ枢動する。左側の揺動軸8は前方に枢動し、右側の揺動軸8は後方に枢動する。このように、揺動軸8が前後に振れると、揺動軸8に接続された脚部5は枢動軸回りに枢動する。図1B及び図3Bに示したように、脚部5が枢動軸6回りに枢動すると、脚部5の下端に装着された足裏部材10、11が前後に移動する。足裏部材10、11は、枢動軸6に対して、揺動軸8と反対側にある。そのため、揺動軸8の前後方向の振れと、足裏部材10、11の前後方向の移動は同期的であるが位相は反対である。
【0027】
従って、図6Bに示すように、左側の揺動軸8が前方に枢動すると、左側の脚部5は、後方に移動する。左側の足裏部材11によって床を蹴ると、上体は右に傾き、右足によってロボットの荷重の大部分を支えることになる。
【0028】
図6Cは、モータ1の回転軸25を所定の回転角θRだけ、反時計方向に回転させた状態を示す。回動板7も反時計方向に回転角θRだけ回転する。それによって、回動板7の偏奇軸12は、モータ1の回転軸25に対して図の左側に横方向に移動する。偏奇軸12と腰部材3はカムとカムフォロワの関係にあるから、腰部材3は左側に横方向に相対的に移動する。従って、腰部材3は、支持部材2に設けられた軸4の回りに枢動する。腰部材3が枢動すると、上体は左側に揺れる。
【0029】
この状態では、回動板7の偏奇軸12とモータ1の回転軸25は、ロボットの矢状面に沿って1直線上に沿って配置されていない。
【0030】
回動板7の両側の揺動軸8の枢動と、両側の脚部5及び足裏部材10、11の移動は、図6Bの場合と逆になる。こうして、本例では、モータ1の回転軸25を所定の回転角だけ回転させると、回動板7及び揺動軸8が揺動し、両側の脚部が枢動軸回りに枢動し、足裏部材10、11が移動する。モータ1の回転軸25の回転と、両側の足裏部材10、11の移動は同期する。尚、このとき、腰部材3は、支持部材2に設けられた軸4の回りに枢動するから、上体も左右に揺れるが、それについては、後に説明する。上体の枢動角は、5〜10度、好ましくは、5〜8度である。
【0031】
図7A及び図7Bを参照して本発明のロボット歩行装置の第3の例を説明する。上述の第2の例では、左右の脚部5が前後に枢動し、足裏部材10、11が前後に移動すると、上体が左右に振れるように構成されている。本例によると、更に、腕も前後に振るように構成されている。ここでは、第2の例と共通の構成については、説明を省略する。第2の例とは異なる部分について説明する。
【0032】
垂直部材14の両側には、1対の腕17が、軸18回りに枢動可能に装着されている。腕17と揺動軸8は、ロッド20によって連結されている。即ち、ロッドの一端19は、揺動軸8の先端に連結され、ロッドの他端24は、腕17の先端部付近に連結されている。こうして、ロッド20によって腕17と揺動軸8が連結されているため、腕17は揺動軸8の前後方向の振りと同位相で振られる。そのため、腕17は、脚部5の振りとは逆位相で前後に振られる。そのため、人間の歩行時と同様の腕の振り運動を実現する。本例では、腕17は、脚部5の振りとは逆位相で前後に振られるから、ロボットは安定的に走行する。
【0033】
図8A及び図8B、図9A及び図9B、図10A及び図10B、図11A及び図11Bを参照して、本発明のロボット歩行装置の第2の例の歩行を説明する。図8A、図9A、図10A及び図11Aは、右側の側面構成を示し、図8B、図9B、図10B及び図11Bは、正面構成を示す。図8A及び図8Bは、本発明のロボット歩行装置の第2の例が中立状態の姿勢である場合を示す。
【0034】
図9A及び図9Bは、右側の脚部(ロボットの進行方向に対して右側の脚部)を前方に移動させながら、左側の脚部が後方に移動する時の姿勢を示す。このとき、図6Bに示したように、回動板7の偏奇軸12によって、腰部材3の長穴13を駆動するため、腰部材3を含む上体は、枢動軸4回りに枢動し、右側に傾斜する。それと同時に、左側の足裏部材11の指先の内側が床に接して、上体を右側に傾斜させる。こうして上体は右側に傾斜する。この過程で、右側の脚部は胴体に対して前方に振られるが、右側の足裏部材10は接地しているため、地面に対しては動かない。その結果、胴体が前傾する。また、左側の脚部は胴体の後ろ側に振られる。
【0035】
図10A及び図10Bは、このような動作によって、左側の脚部が地面より浮き上がった状態を示す。この状態になると、胴体はモータによって能動的に左に傾いていくと同時に、右側の足裏部材10の外側で支えている状態なので、それによって、胴体は左に傾斜する。
【0036】
図11A及び図11Bは、上体が、右側に最大に傾斜した状態を示す。この状態では、ロボットの荷重を、右側の足裏部材10の右側の側面のみで支持している。このとき、右側の足裏部材10が(上から見て)外側にVの字に広がっており、また上体が前方に振られる動的効果で、ロボット全体は、右側の足裏部材10の前方外側の接地点を中心に回転し若干前方に移動する。
【0037】
その後、ロボットは図8A及び図8Bに示す中立状態の姿勢に戻り、今度は左方向に同様な動作を行う。それによってロボット全体は前進する。このような動作を繰り返すことで、ロボットは前進運動を行う。
【0038】
ここでは、本発明のロボット走行装置の第2の例の動作を説明したが、第1の例及び第3の例の動作も同様である。
【0039】
本発明によると、遠隔操作する操縦桿の左右の動きに同期してモータ1の回転軸25が左右への往復回転を繰り返し、それに同期して、左右の脚部の運動が生成される。即ち、左右の脚部の運動は、操縦桿の左右の動きに同期している。従って、操縦桿の動きを好適に制御することにより、脚部の走行を自由に変更することができる。そのため、ロボットの進行方向及び走行速度を自由に制御することができる。
【0040】
例えば、操縦桿を左に振らすスピードと右に振らすスピードが異なると、それに応じて、左右の脚部の運動速度が互いに異なるように変化する。こうして、片側の脚部に重心が載って、その後その重心が逆側の脚部に乗る運動の左右への動き方が変わり、足裏が地面を押し付ける動的な効果が左右の脚部で異なることになる。こうして、左右の脚部による立脚状態での推進距離が異なることとなり、進行方向を自在に操縦することができる。操縦桿の振り速度を変化させることにより、歩行速度も変化させることができる。
【0041】
本発明によると、ロボットが推進できる原理は、脚部の振りと胴体の移動が足裏を地面に押し付けて跳ね返る動的な運動の効果を利用したものである。歩行運動を有効に生成するには、足裏部材10、11の形状と材質を適切に設定することが不可欠である。足裏部材10、11の形状としては、上体部の左右と前後の揺動でも転倒しない程度の広さを持ち、細長くて足先がVの字型に広がっているものがよい。このような形状だと、上体の重心を支持する面積が広く、また脚部の後ろへの振り上げ時に、適度に床を蹴りながら、長めの足裏が床面に接触し難い。また足裏の材質としては適度の弾性と摩擦係数の高さがあるのが望ましい。実際にはウレタンフォームなどを使用するのが適する。
【0042】
上述の例では、モータの回転軸は上を向いているが、これに限定されず、矢状面にその軸が含まれれば、垂直でも水平でもよい。それぞれ適当なリンク系を導入することによって、脚部の振り運動、あるいはそれに付随して胴体の左右の振り運動、さらに腕の振り運動を生成する構成でもよい。
【0043】
以上本発明の例を説明したが本発明は上述の例に限定されるものではなく、特許請求の範囲に記載された発明の範囲にて様々な変更が可能であることは、当業者によって容易に理解されよう。
【符号の説明】
【0044】
1…モータ、2…支持部材、3…腰部材、4…軸、5…脚部、6…軸、7…回動板、8…揺動軸、9…長穴、10、11…足裏部材、12…偏奇軸、13…長穴、14…垂直部材、15…ネジ、17…腕、18…軸、19…ロッドの端、20…ロッド、21…バッテリ、22…通信用モデム、23…スイッチ、24…ロッドの端、25…回転軸
【特許請求の範囲】
【請求項1】
胴体と、1対の脚部と、前記脚部の下端部に装着された足裏部材と、前記1対の脚部を交互に走行させる駆動機構を有するロボット走行装置において、
前記脚部は、前記ロボットの胴体の矢状面に対して垂直に配置された枢動軸回りに枢動可能に構成され、
前記駆動機構は、遠隔操縦によって回転可能なモータと、該モータの軸に装着された回動板と、該回動板の両側に装着された1対の揺動軸と、を有し、該揺動軸は、前記脚部の上端に係合され、前記モータによって、前記回動板を、交互に反対方向に所定の回転角だけ回転させることによって、前記1対の揺動軸は交互に反対方向に揺動し、それによって、前記1対の脚部は、交互に反対方向に前記枢動軸回りに枢動することによって、前記足裏部材が前記前後方向に交互に移動するように構成されているロボット走行装置。
【請求項2】
請求項1記載のロボット走行装置において、
前記胴体は、前記モータを支持する支持部材と、該支持部材に装着された腰部材と、該腰部材に装着された垂直部材と、を有し、前記垂直部材に前記モータのためのバッテリが装着され、前記垂直部材の上端に、ジョイスティック型コントローラと通信する通信モデムが装着されていることを特徴とするロボット走行装置。
【請求項3】
請求項1記載のロボット走行装置において、前記モータの軸は、前記ロボットの胴体の矢状面上に配置されていることを特徴とするロボット走行装置。
【請求項4】
請求項2記載の走行装置において、
前記腰部材は、前記支持部材の両側の枢動軸に枢動可能に装着され、
前記腰部材には、前記ロボットの胴体の矢状面に垂直な方向に沿って延びた長穴が設けられ、
前記回動板には、前記モータの軸に対して偏奇した偏奇軸が設けられ、該偏奇軸は、前記腰部材の長穴に係合しており、前記偏奇軸と前記腰部材の長穴は、カムとカムフォロワとして機能し、前記モータによって前記回動板を、交互に反対方向に所定の回転角だけ回転させることによって、前記偏奇軸が湾曲した軌道に沿って移動し、それによって前記腰部材は、前記枢動軸回りに枢動し、該前記腰部材の枢動は、前記足裏部材の前後方向の移動に同期することを特徴とする走行装置。
【請求項5】
請求項2記載の走行装置において、
前記垂直部材の両側には、1対の腕が、枢動軸回りに枢動可能に装着されており、該腕と前記揺動軸は、ロッドによって連結されており、前記腕の枢動は、前記足裏部材の前後方向の移動に同期し、且つ逆位相であることを特徴とする走行装置。
【請求項1】
胴体と、1対の脚部と、前記脚部の下端部に装着された足裏部材と、前記1対の脚部を交互に走行させる駆動機構を有するロボット走行装置において、
前記脚部は、前記ロボットの胴体の矢状面に対して垂直に配置された枢動軸回りに枢動可能に構成され、
前記駆動機構は、遠隔操縦によって回転可能なモータと、該モータの軸に装着された回動板と、該回動板の両側に装着された1対の揺動軸と、を有し、該揺動軸は、前記脚部の上端に係合され、前記モータによって、前記回動板を、交互に反対方向に所定の回転角だけ回転させることによって、前記1対の揺動軸は交互に反対方向に揺動し、それによって、前記1対の脚部は、交互に反対方向に前記枢動軸回りに枢動することによって、前記足裏部材が前記前後方向に交互に移動するように構成されているロボット走行装置。
【請求項2】
請求項1記載のロボット走行装置において、
前記胴体は、前記モータを支持する支持部材と、該支持部材に装着された腰部材と、該腰部材に装着された垂直部材と、を有し、前記垂直部材に前記モータのためのバッテリが装着され、前記垂直部材の上端に、ジョイスティック型コントローラと通信する通信モデムが装着されていることを特徴とするロボット走行装置。
【請求項3】
請求項1記載のロボット走行装置において、前記モータの軸は、前記ロボットの胴体の矢状面上に配置されていることを特徴とするロボット走行装置。
【請求項4】
請求項2記載の走行装置において、
前記腰部材は、前記支持部材の両側の枢動軸に枢動可能に装着され、
前記腰部材には、前記ロボットの胴体の矢状面に垂直な方向に沿って延びた長穴が設けられ、
前記回動板には、前記モータの軸に対して偏奇した偏奇軸が設けられ、該偏奇軸は、前記腰部材の長穴に係合しており、前記偏奇軸と前記腰部材の長穴は、カムとカムフォロワとして機能し、前記モータによって前記回動板を、交互に反対方向に所定の回転角だけ回転させることによって、前記偏奇軸が湾曲した軌道に沿って移動し、それによって前記腰部材は、前記枢動軸回りに枢動し、該前記腰部材の枢動は、前記足裏部材の前後方向の移動に同期することを特徴とする走行装置。
【請求項5】
請求項2記載の走行装置において、
前記垂直部材の両側には、1対の腕が、枢動軸回りに枢動可能に装着されており、該腕と前記揺動軸は、ロッドによって連結されており、前記腕の枢動は、前記足裏部材の前後方向の移動に同期し、且つ逆位相であることを特徴とする走行装置。
【図1A】


【図1B】
【図2】
【図3A】
【図3B】
【図4】
【図5】
【図6A】
【図6B】
【図6C】
【図7A】
【図7B】
【図8A】
【図8B】
【図9A】
【図9B】
【図10A】
【図10B】
【図11A】
【図11B】
【図1B】
【図2】
【図3A】
【図3B】
【図4】
【図5】
【図6A】
【図6B】
【図6C】
【図7A】
【図7B】
【図8A】
【図8B】
【図9A】
【図9B】
【図10A】
【図10B】
【図11A】
【図11B】
【公開番号】特開2012−152869(P2012−152869A)
【公開日】平成24年8月16日(2012.8.16)
【国際特許分類】
【出願番号】特願2011−15194(P2011−15194)
【出願日】平成23年1月27日(2011.1.27)
【出願人】(500552113)
【Fターム(参考)】
【公開日】平成24年8月16日(2012.8.16)
【国際特許分類】
【出願日】平成23年1月27日(2011.1.27)
【出願人】(500552113)
【Fターム(参考)】
[ Back to top ]