
ロボット玩具
【課題】簡易な構造により小型化を可能にする。
【解決手段】制御基板251は主面が玩具本体2の正面を向くように玩具本体2の内部に起立して設置され、玩具本体2の内部空間27は制御基板251の主面側で上部空間273、中部空間274及び下部空間275に仕切られ、このうち下部空間275にはコイル244を有する左右の脚部24,24が設けられ、上部空間273及び中部空間274には赤外線受信部211及び電池221が設置される。
【解決手段】制御基板251は主面が玩具本体2の正面を向くように玩具本体2の内部に起立して設置され、玩具本体2の内部空間27は制御基板251の主面側で上部空間273、中部空間274及び下部空間275に仕切られ、このうち下部空間275にはコイル244を有する左右の脚部24,24が設けられ、上部空間273及び中部空間274には赤外線受信部211及び電池221が設置される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ロボット玩具に関する。
【背景技術】
【0002】
従来、コントローラからのリモコン信号に基づいて歩行等の動作が可能なロボット玩具が知られている(例えば、特許文献1参照)。近年では、特に、操作が簡単で気楽に遊べる小型のロボット玩具に対する要望が強まっている。
【特許文献1】特開2003−181152号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、従来のロボット玩具では、歩行等の動作が可能な機構の他、信号受信部や制御基板などの多くの部品を本体内部に収納する必要から、玩具本体の構造が複雑化してしまい、小型化が困難であった。
【0004】
本発明は、上記事情を鑑みてなされたもので、簡易な構造により小型化が可能なロボット玩具の提供を課題とする。
【課題を解決するための手段】
【0005】
前記の課題を解決するために、請求項1に記載の発明は、
赤外線コントローラと、
電源である電池、及び前記赤外線コントローラからの制御信号を受信する赤外線受信部を有し、前記制御信号によって駆動制御される玩具本体と、
を備えるロボット玩具において、
前記玩具本体は、
前記玩具本体の内部に主面が当該玩具本体の正面を向くように起立して設置された制御基板と、
前記玩具本体の内部空間を前記制御基板の主面側で上下方向に少なくとも二つの空間に仕切る仕切板と、
前記少なくとも二つの空間のうち最下の空間を左室及び右室に仕切る仕切壁と、
前記左室及び前記右室へ所定の磁極が向くように設置された永久磁石と、
前記少なくとも二つの空間のうち前記最下の空間を除く空間に設置された前記電池及び前記赤外線受信部と、
前記左室及び前記右室にそれぞれの基端部が挿入され、前記仕切壁に設けられた軸を中心に前後方向に回動可能に設置されるとともに、各足部が前記玩具本体の下方から露出する左右の脚部と、
通電方向により磁極の変化する面が前記永久磁石に対向するように前記左右の脚部にそれぞれ設置されたコイルと、
前記制御基板に設置され、前記赤外線受信部で受信される前記制御信号に基づいて前記コイルの通電制御を行う通電制御手段と、
を備えることを特徴とする。
【0006】
請求項2に記載の発明は、請求項1に記載のロボット玩具において、
前記電池は、充電可能なリチウムイオン電池であることを特徴とする。
【0007】
請求項3に記載の発明は、請求項2に記載のロボット玩具において、
前記玩具本体の正面側には前記リチウムイオン電池を充電するための充電用端子が露出して設けられることを特徴とする。
【0008】
請求項4に記載の発明は、請求項3に記載のロボット玩具において、
前記赤外線コントローラには、前記リチウムイオン電池へ給電するために前記充電用端子と当接される給電用端子が設けられることを特徴とする。
【0009】
請求項5に記載の発明は、請求項1〜4のいずれか一項に記載のロボット玩具において、
前記玩具本体には、前記赤外線受信部の左右に、前方の物体に向けて赤外線を発信する赤外線発信部が設けられ、
前記通電制御手段は、回避モードを有し、当該回避モードでは、前記赤外線受信部で受信される前記赤外線に基づく前記物体の検知結果に応じて、当該物体を避ける方向へ前記玩具本体が進行するように前記コイルの通電制御を行うことを特徴とする。
【0010】
請求項6に記載の発明は、請求項1〜5のいずれか一項に記載のロボット玩具において、
前記玩具本体には、前記赤外線受信部の左右に、前方の物体に向けて赤外線を発信する赤外線発信部が設けられ、
前記通電制御手段は、追尾モードを有し、当該追尾モードでは、前記赤外線受信部で受信される前記赤外線に基づく前記物体の検知結果に応じて、当該物体を追尾する方向へ前記玩具本体が進行するように前記コイルの通電制御を行うことを特徴とする。
【発明の効果】
【0011】
本発明によれば、制御基板は主面が玩具本体の正面を向くように玩具本体の内部に起立して設置され、玩具本体の内部空間は制御基板の主面側で少なくとも二つの空間に仕切られ、最下の空間にはコイルを有する左右の脚部が設けられ、最下以外の空間には電池及び赤外線受信部が設置される。このような簡易な構造により、コイルと、電池及び赤外線受信部とを、比較的に高くすることが許容される上下方向に分けて玩具本体の幅や前後方向の厚さを小さく抑えつつ、制御基板の主面の近傍に配置して配線を短くすることができる。したがって、簡易な構造により小型化することができる。
【発明を実施するための最良の形態】
【0012】
以下、本発明の実施の形態について、図を参照して説明する。
図1は本発明に係るロボット玩具1の外観図であり、図2〜4はロボット玩具1のうち玩具本体2の構成を説明するための図であり、図5〜7はロボット玩具1のうち赤外線コントローラ(以下、コントローラという)3の構成を説明するための図である。
【0013】
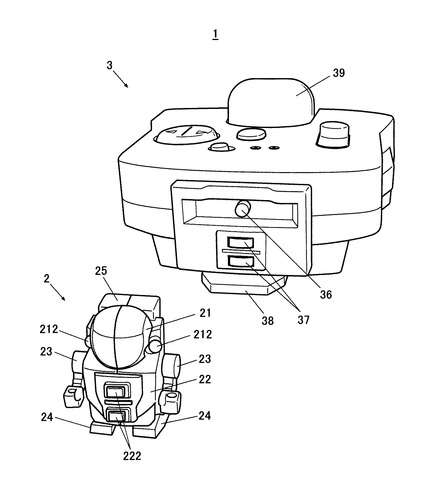
図1に示すように、ロボット玩具1は、玩具本体2と、制御信号を発信して玩具本体2を駆動制御するコントローラ3とを備えている。
玩具本体2は、二等身ほどにデフォルメされた人型のロボットであり、頭部21、胴部22、腕部23,23、脚部24,24及びバックパック25から構成されている。
【0014】
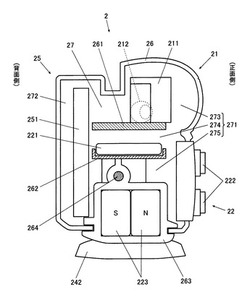
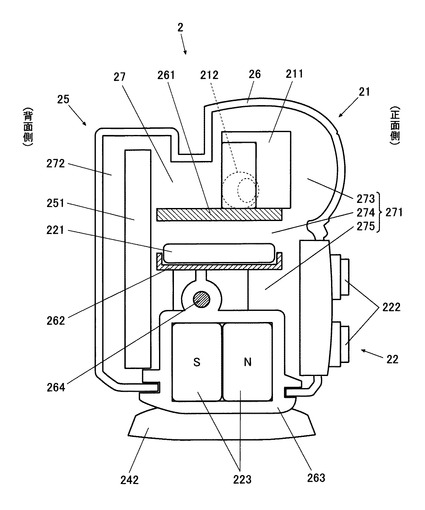
このうち、頭部21、胴部22及びバックパック25は、図2に示すように、一体に形成されており、外殻のボディケース26及びその内部空間27を共有している。内部空間27は、頭部21及び胴部22の内部に相当する正面側空間271と、バックパック25の内部に相当する背面側空間272とからなり、このうち正面側空間271は、ボディケース26に固定された上部仕切板261及び下部仕切板262によって、頭部21の内部に相当する上部空間273と,胴部22の内部に相当する中部空間274及び下部空間275との上下方向の三つの空間に仕切られている。
【0015】
内部空間27のうち背面側空間272には、後述の通電制御手段28を備える制御基板(以下、基板という)251が設けられている。この基板251は、電子部品を実装した主面が玩具本体2の正面を向くように起立して設置されている。
【0016】
上部空間273には、赤外線受信部211が上部仕切板261上に設けられている。赤外線受信部211は、受信面を玩具本体2の正面側に向けて固定され、コントローラ3から発信される制御信号や、頭部21の外側に設けられた赤外線発信部212,212から発信されて外部の物体で反射された赤外線を受信する。なお、頭部21の顔部分のボディケース26は、これら制御信号や赤外線が透過可能な材質で形成されている。
【0017】
この赤外線発信部212,212は、頭部21の左右に露出して設けられ、前方の物体を検知するための赤外線を発信する(図1参照)。左右の赤外線発信部212,212から発信される赤外線は、それぞれ左右斜め前方に向けて互いに異なる波長で一定時間毎に発信されるとともに、互いに重複せず、かつ大きな間隙を生じないような照射幅で発信される。
【0018】
中部空間274には、電池221が下部仕切板262上に設けられている。電池221は、充電可能なリチウムイオン電池であり、より詳しくはリチウムイオンポリマー電池である。この電池221は、胴部22の正面側のボディケース26に露出して設けられたマグネット製の充電用端子222,222と電気的に接続されている。
【0019】
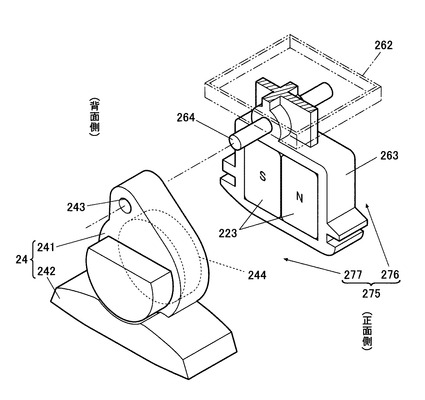
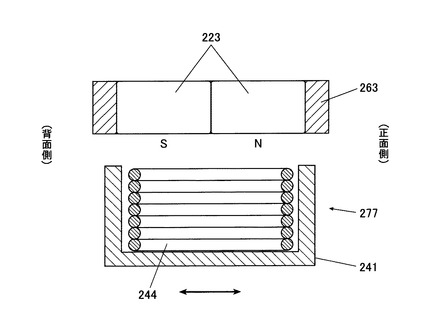
下部空間275には、図3に示すように、当該下部空間275を左室276と右室277とに左右均等に仕切る仕切壁263が、下部仕切板262の下面に固定されている。仕切壁263には、互いに極性の異なる二つの面が左右の主面にそれぞれ露出するように、方形状の二つの永久磁石223が前後方向に並べて付設されており、本実施の形態においては、正面側の永久磁石223の露出面がN極、背面側の永久磁石223の露出面がS極にそれぞれ着磁されている。なお、図3では右室277内のみを図示しているが、左室276内は右室277内と同様に構成されており、より詳しくは、仕切壁263に対して右室277内と対象になるように構成されている。
【0020】
仕切壁263の上部やや背面側には、左室276及び右室277内で左右方向に延在する回動軸264が当該仕切壁263を貫通して取り付けられている。この回動軸264は、脚部24,24の基端部に設けられた回動穴243に嵌合され、脚部24,24を前後方向に回動可能に軸支している。
【0021】
脚部24,24は、内部にコイル244を収納する大腿部241と、玩具本体2の下方から露出している足部242とから構成されている。大腿部241に収納されたコイル244は、図4に示すように、端面を仕切壁263の二つの永久磁石223,223と対向させている。この構成により、コイル244に電流が流れた際に、その通電方向に応じて端面の磁極が変化して永久磁石223,223から当該コイル244に吸引力又は反発力が作用することで、大腿部241ひいては脚部24が回動軸264を中心に前後いずれかの方向に回動する。なお、コイル244は、偏平コイルであってもよい。
【0022】
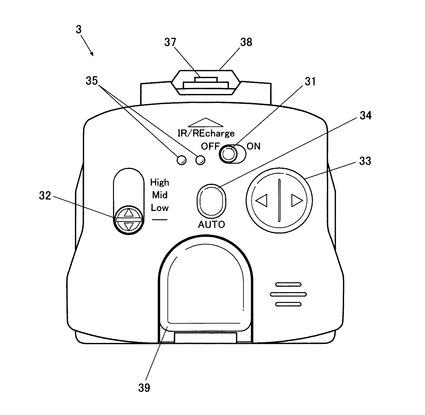
コントローラ3は、図5に示すように、略方形状の箱型に形成され、その主表面には、電源スイッチ31、速度スイッチ32、方向ボタン33、モード切替ボタン34及びステータスランプ35が配設されている。
このうち、電源スイッチ31は、電源のON/OFFを切り替えるスイッチである。
【0023】
速度スイッチ32は、玩具本体2の歩行速度を高速(High),中速(Mid),低速(Low)の3段階に切り替える他、この速度制御が有効な通常制御状態から玩具本体2が自動歩行するAUTO状態への切り替えを行うスイッチである。
【0024】
方向ボタン33は、左右に押下可能なボタンであり、押下した左右いずれかの方向に玩具本体2の進行方向を変えるボタンである。但し、この方向ボタン33による操作は、速度スイッチ32がHigh、Mid及びLowのいずれかにセットされているとき、つまり玩具本体2が通常制御状態に設定されているときに有効となる。
【0025】
モード切替ボタン34は、AUTO状態における玩具本体2の駆動モードを後述の「前進」,「回避」,「追尾」のいずれかに切り替えるボタンであり、押下する毎にこの順に駆動モードが切り替わる。但し、このモード切替ボタン34による操作は、速度スイッチ32により玩具本体2がAUTO状態に設定されているときにのみ有効となる。
【0026】
ステータスランプ35は、玩具本体2の制御状態等を示す二つのランプであり、本実施の形態においては、玩具本体2が通常制御状態のときに一方のランプが青色点灯し、AUTO状態のときに他方のランプが点灯する。AUTO状態のうち「前進」、「回避」及び「追尾」のいずれの駆動モードに設定されているかは、各駆動モードに対応した他方のランプの点灯色によって識別できる。また、ステータスランプ35は、電源がOFFのときに消灯する他、後述するように玩具本体2が充電されているときには緑色点灯し、充電が完了すると消灯する。
【0027】
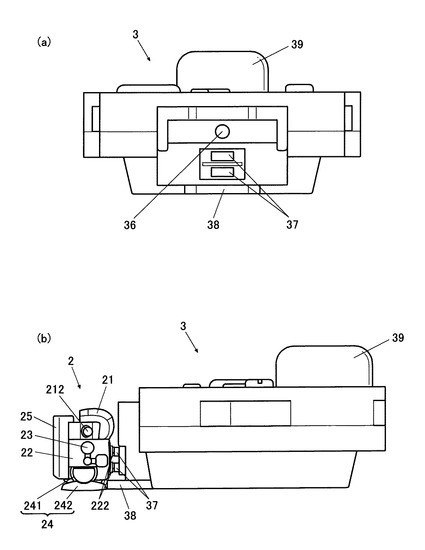
また、コントローラ3の前面には、図6(a)に示すように、制御信号が発信される発光素子36と、玩具本体2の電池221へ給電するための給電用端子37,37が配設されている。このうち、給電用端子37,37は、コントローラ3内部に収納されたコントローラ用電池(図示せず)と電気的に接続されており、図6(b)に示すように、玩具本体2の充電用端子222,222とそれぞれ当接されることにより、コントローラ用電池が玩具本体2の電池221へ給電するように構成されている。
【0028】
この給電用端子37,37は、充電用端子222,222に対して吸引力を作用させるマグネットで形成されている。これにより、両端子を当接させやすくするとともに、充電中に離れることを防止している。
また、給電用端子37,37の下方には、規制板38が張り出されている。この規制板38は、給電用端子37,37が充電用端子222,222と当接するときに、その前面が玩具本体2の足部242,242と当接するように形成されている。この規制板38により、玩具本体2が前後方向に傾斜して一方の充電用端子222だけが給電用端子37と当接してしまう状態を防止している。
【0029】
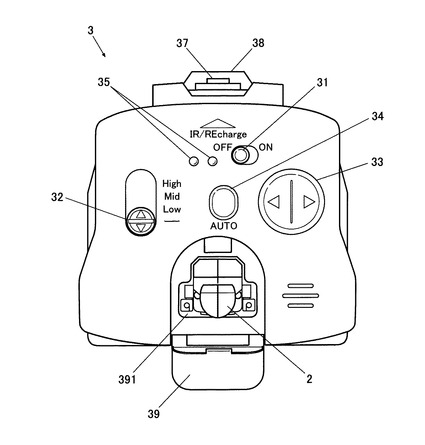
また、コントローラ3の主表面であって上述のボタン群の後面側には、ドーム状の開閉ケース39が設けられている。この開閉ケース39は、図7に示すように、端部を中心に回動可能に設けられるとともに、内部のコントローラ3主表面には玩具本体2の上面視形状の凹部391が形成されており、この凹部391に玩具本体2を収容できるようになっている。
【0030】
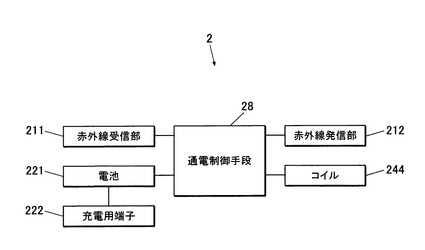
続いて、玩具本体2の制御構成について図8を参照して説明する。図8は、玩具本体2の制御構成を示すブロック図である。
【0031】
この図に示すように、玩具本体2は通電制御手段28を備えている。通電制御手段28は、赤外線受信部211、赤外線発信部212、電池221及びコイル244と接続され、赤外線受信部211が受信した制御信号又は赤外線に基づいて、赤外線発信部212,212からの赤外線の発信やコイル244への通電を制御する。
【0032】
続いて、玩具本体2の動作について説明する。
玩具本体2の動作の種類は、上述した通常制御状態とAUTO状態とに大別でき、このうちAUTO状態は、「前進」、「回避」及び「追尾」の三つの駆動モードに分けられる。
【0033】
通常制御状態での玩具本体2の動作は、コントローラ3の電源スイッチ31をON、速度スイッチ32をHigh、Mid及びLowのいずれかにセットしたときに可能となる。この状態では、通電制御手段28が、脚部24,24のコイル244,244に対し左右で通電方向の異なる電流を当該通電方向が交互に逆転するように通電させることにより、左右の脚部24,24が交互に回動されて玩具本体2が前進歩行する。
【0034】
このとき、通電される電流量は速度スイッチ32の設定に応じて制御され、玩具本体2は当該設定に応じた速度で歩行する。また、この状態では、方向ボタン33を左右いずれかに押下することにより、コイル244,244へ通電される電流量又は通電方向の逆転する時間間隔が制御され、押下されたボタンの方向へ玩具本体2が進行方向を変化させる。
【0035】
AUTO状態での玩具本体2の動作は、コントローラ3の電源スイッチ31をON、速度スイッチ32をAUTO状態の位置にセットしたときに可能となる。このAUTO状態では、玩具本体2の歩行速度は切り替えられず、所定の速度に設定される。
【0036】
AUTO状態のうち「前進」モードでの玩具本体2の動作は、速度スイッチ32をAUTO状態の位置にセットした後、モード切替ボタン34を押下してステータスランプ35のうちの他方のランプを当該「前進」モードに対応した色に点灯させることにより可能となる。この「前進」モードでの動作は、方向ボタン33による操作が無効となった場合の通常制御状態での動作と同様であり、玩具本体2はひたすら前進歩行を続ける。
【0037】
「回避」モードでの玩具本体2の動作は、「前進」モードへの切り替えと同様の操作により、ステータスランプ35のうちの他方のランプを当該「回避」モードに対応した色に点灯させることにより可能となる。このモードに設定されると、通電制御手段28は、赤外線発信部212,212から左右で波長の異なる赤外線を発信させる。赤外線の照射範囲に物体が存在すると、この物体で反射された赤外線が赤外線受信部211に受信される。そして、通電制御手段28は、受信された赤外線の波長を識別することにより左右どちらに物体が存在するかとともに当該物体を障害物として認識し、コイル244,244へ通電される電流量又は通電方向の逆転する時間間隔を制御して、この物体を回避する方向に玩具本体2の進行方向を変化させる。
【0038】
「追尾」モードでの玩具本体2の動作は、「前進」モードへの切り替えと同様の操作により、ステータスランプ35のうちの他方のランプを当該「追尾」モードに対応した色に点灯させることにより可能となる。このモードに設定されると、通電制御手段28は、赤外線発信部212,212から左右で波長の異なる赤外線を発信させる。赤外線の照射範囲に物体が存在すると、この物体で反射された赤外線が赤外線受信部211に受信される。そして、通電制御手段28は、受信された赤外線の波長を識別することにより左右どちらに物体が存在するかを認識し、コイル244,244へ通電される電流量又は通電方向の逆転する時間間隔を制御して、この物体を追尾する方向に玩具本体2の進行方向を変化させる。
【0039】
また、「追尾」モードでは、コントローラ3を玩具本体2の移動平面上に載置しておくことで、玩具本体2がコントローラ3の発光素子36を検知して追尾し、自動的に充電用端子222,222と給電用端子37,37とが当接する図6(b)の状態となって、電池221が充電される。
【0040】
以上のように、本発明に係るロボット玩具1によれば、基板251は主面が玩具本体2の正面を向くように玩具本体2の内部に起立して設置され、玩具本体2の内部空間27は基板251の主面側で上部空間273、中部空間274及び下部空間275に仕切られ、このうち下部空間275にはコイル244を有する左右の脚部24,24が設けられ、上部空間273及び中部空間274には赤外線受信部211及び電池221が振り分けられて設置される。このような簡易な構造により、コイル244、電池221及び赤外線受信部211の各部品を、比較的に高くすることが許容される上下方向に分けて玩具本体2の幅や前後方向の厚さを小さく抑えつつ、基板251の主面の近傍に配置して配線を短くすることができる。したがって、簡易な構造により小型化することができる。
【0041】
なお、上記実施の形態においては、赤外線発信部212,212は左右で異なる波長の赤外線を発信するものとして記載したが、異なるタイミングで同じ波長の赤外線を発信するものとしてもよい。この場合、通電制御手段28は、反射された赤外線が赤外線受信部211に受信されるタイミングを識別することで、左右どちらに物体が存在するかを認識できる。
【0042】
また、上記実施の形態においては、内部空間27のうち正面側空間271は、上部空間273、中部空間274及び下部空間275の三つの空間に仕切られるものとして記載したが、少なくとも二つの空間に仕切られていればよい。二つの空間に仕切られた場合には、下側の空間に脚部24,24や永久磁石223を設け、上側の空間に電池221や赤外線受信部211を設ければよい。
【0043】
また、その他の点においても、本発明は上記実施の形態に限定されるものではなく、適宜変更可能であるのは勿論である。
【図面の簡単な説明】
【0044】
【図1】本実施の形態におけるロボット玩具の外観図である。
【図2】玩具本体の側断面図である。
【図3】下部空間の右室内の分解斜視図である。
【図4】コイルの配置を説明するための断面図である。
【図5】赤外線コントローラの上面図である。
【図6】赤外線コントローラの(a)正面図であり、(b)玩具本体を充電するときの側面図である。
【図7】玩具本体を収納した状態の赤外線コントローラの上面図である。
【図8】玩具本体の制御構成を示すブロック図である。
【符号の説明】
【0045】
1 ロボット玩具
2 玩具本体
3 赤外線コントローラ
22 胴部
24 脚部
27 内部空間
28 通電制御手段
37 給電用端子
211 赤外線受信部
212 赤外線発信部
221 電池
222 充電用端子
223 永久磁石
242 足部
244 コイル
251 制御基板
261 上部仕切板
262 下部仕切板
263 仕切壁
264 回動軸
273 上部空間
274 中部空間
275 下部空間
276 左室
277 右室
【技術分野】
【0001】
本発明は、ロボット玩具に関する。
【背景技術】
【0002】
従来、コントローラからのリモコン信号に基づいて歩行等の動作が可能なロボット玩具が知られている(例えば、特許文献1参照)。近年では、特に、操作が簡単で気楽に遊べる小型のロボット玩具に対する要望が強まっている。
【特許文献1】特開2003−181152号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、従来のロボット玩具では、歩行等の動作が可能な機構の他、信号受信部や制御基板などの多くの部品を本体内部に収納する必要から、玩具本体の構造が複雑化してしまい、小型化が困難であった。
【0004】
本発明は、上記事情を鑑みてなされたもので、簡易な構造により小型化が可能なロボット玩具の提供を課題とする。
【課題を解決するための手段】
【0005】
前記の課題を解決するために、請求項1に記載の発明は、
赤外線コントローラと、
電源である電池、及び前記赤外線コントローラからの制御信号を受信する赤外線受信部を有し、前記制御信号によって駆動制御される玩具本体と、
を備えるロボット玩具において、
前記玩具本体は、
前記玩具本体の内部に主面が当該玩具本体の正面を向くように起立して設置された制御基板と、
前記玩具本体の内部空間を前記制御基板の主面側で上下方向に少なくとも二つの空間に仕切る仕切板と、
前記少なくとも二つの空間のうち最下の空間を左室及び右室に仕切る仕切壁と、
前記左室及び前記右室へ所定の磁極が向くように設置された永久磁石と、
前記少なくとも二つの空間のうち前記最下の空間を除く空間に設置された前記電池及び前記赤外線受信部と、
前記左室及び前記右室にそれぞれの基端部が挿入され、前記仕切壁に設けられた軸を中心に前後方向に回動可能に設置されるとともに、各足部が前記玩具本体の下方から露出する左右の脚部と、
通電方向により磁極の変化する面が前記永久磁石に対向するように前記左右の脚部にそれぞれ設置されたコイルと、
前記制御基板に設置され、前記赤外線受信部で受信される前記制御信号に基づいて前記コイルの通電制御を行う通電制御手段と、
を備えることを特徴とする。
【0006】
請求項2に記載の発明は、請求項1に記載のロボット玩具において、
前記電池は、充電可能なリチウムイオン電池であることを特徴とする。
【0007】
請求項3に記載の発明は、請求項2に記載のロボット玩具において、
前記玩具本体の正面側には前記リチウムイオン電池を充電するための充電用端子が露出して設けられることを特徴とする。
【0008】
請求項4に記載の発明は、請求項3に記載のロボット玩具において、
前記赤外線コントローラには、前記リチウムイオン電池へ給電するために前記充電用端子と当接される給電用端子が設けられることを特徴とする。
【0009】
請求項5に記載の発明は、請求項1〜4のいずれか一項に記載のロボット玩具において、
前記玩具本体には、前記赤外線受信部の左右に、前方の物体に向けて赤外線を発信する赤外線発信部が設けられ、
前記通電制御手段は、回避モードを有し、当該回避モードでは、前記赤外線受信部で受信される前記赤外線に基づく前記物体の検知結果に応じて、当該物体を避ける方向へ前記玩具本体が進行するように前記コイルの通電制御を行うことを特徴とする。
【0010】
請求項6に記載の発明は、請求項1〜5のいずれか一項に記載のロボット玩具において、
前記玩具本体には、前記赤外線受信部の左右に、前方の物体に向けて赤外線を発信する赤外線発信部が設けられ、
前記通電制御手段は、追尾モードを有し、当該追尾モードでは、前記赤外線受信部で受信される前記赤外線に基づく前記物体の検知結果に応じて、当該物体を追尾する方向へ前記玩具本体が進行するように前記コイルの通電制御を行うことを特徴とする。
【発明の効果】
【0011】
本発明によれば、制御基板は主面が玩具本体の正面を向くように玩具本体の内部に起立して設置され、玩具本体の内部空間は制御基板の主面側で少なくとも二つの空間に仕切られ、最下の空間にはコイルを有する左右の脚部が設けられ、最下以外の空間には電池及び赤外線受信部が設置される。このような簡易な構造により、コイルと、電池及び赤外線受信部とを、比較的に高くすることが許容される上下方向に分けて玩具本体の幅や前後方向の厚さを小さく抑えつつ、制御基板の主面の近傍に配置して配線を短くすることができる。したがって、簡易な構造により小型化することができる。
【発明を実施するための最良の形態】
【0012】
以下、本発明の実施の形態について、図を参照して説明する。
図1は本発明に係るロボット玩具1の外観図であり、図2〜4はロボット玩具1のうち玩具本体2の構成を説明するための図であり、図5〜7はロボット玩具1のうち赤外線コントローラ(以下、コントローラという)3の構成を説明するための図である。
【0013】
図1に示すように、ロボット玩具1は、玩具本体2と、制御信号を発信して玩具本体2を駆動制御するコントローラ3とを備えている。
玩具本体2は、二等身ほどにデフォルメされた人型のロボットであり、頭部21、胴部22、腕部23,23、脚部24,24及びバックパック25から構成されている。
【0014】
このうち、頭部21、胴部22及びバックパック25は、図2に示すように、一体に形成されており、外殻のボディケース26及びその内部空間27を共有している。内部空間27は、頭部21及び胴部22の内部に相当する正面側空間271と、バックパック25の内部に相当する背面側空間272とからなり、このうち正面側空間271は、ボディケース26に固定された上部仕切板261及び下部仕切板262によって、頭部21の内部に相当する上部空間273と,胴部22の内部に相当する中部空間274及び下部空間275との上下方向の三つの空間に仕切られている。
【0015】
内部空間27のうち背面側空間272には、後述の通電制御手段28を備える制御基板(以下、基板という)251が設けられている。この基板251は、電子部品を実装した主面が玩具本体2の正面を向くように起立して設置されている。
【0016】
上部空間273には、赤外線受信部211が上部仕切板261上に設けられている。赤外線受信部211は、受信面を玩具本体2の正面側に向けて固定され、コントローラ3から発信される制御信号や、頭部21の外側に設けられた赤外線発信部212,212から発信されて外部の物体で反射された赤外線を受信する。なお、頭部21の顔部分のボディケース26は、これら制御信号や赤外線が透過可能な材質で形成されている。
【0017】
この赤外線発信部212,212は、頭部21の左右に露出して設けられ、前方の物体を検知するための赤外線を発信する(図1参照)。左右の赤外線発信部212,212から発信される赤外線は、それぞれ左右斜め前方に向けて互いに異なる波長で一定時間毎に発信されるとともに、互いに重複せず、かつ大きな間隙を生じないような照射幅で発信される。
【0018】
中部空間274には、電池221が下部仕切板262上に設けられている。電池221は、充電可能なリチウムイオン電池であり、より詳しくはリチウムイオンポリマー電池である。この電池221は、胴部22の正面側のボディケース26に露出して設けられたマグネット製の充電用端子222,222と電気的に接続されている。
【0019】
下部空間275には、図3に示すように、当該下部空間275を左室276と右室277とに左右均等に仕切る仕切壁263が、下部仕切板262の下面に固定されている。仕切壁263には、互いに極性の異なる二つの面が左右の主面にそれぞれ露出するように、方形状の二つの永久磁石223が前後方向に並べて付設されており、本実施の形態においては、正面側の永久磁石223の露出面がN極、背面側の永久磁石223の露出面がS極にそれぞれ着磁されている。なお、図3では右室277内のみを図示しているが、左室276内は右室277内と同様に構成されており、より詳しくは、仕切壁263に対して右室277内と対象になるように構成されている。
【0020】
仕切壁263の上部やや背面側には、左室276及び右室277内で左右方向に延在する回動軸264が当該仕切壁263を貫通して取り付けられている。この回動軸264は、脚部24,24の基端部に設けられた回動穴243に嵌合され、脚部24,24を前後方向に回動可能に軸支している。
【0021】
脚部24,24は、内部にコイル244を収納する大腿部241と、玩具本体2の下方から露出している足部242とから構成されている。大腿部241に収納されたコイル244は、図4に示すように、端面を仕切壁263の二つの永久磁石223,223と対向させている。この構成により、コイル244に電流が流れた際に、その通電方向に応じて端面の磁極が変化して永久磁石223,223から当該コイル244に吸引力又は反発力が作用することで、大腿部241ひいては脚部24が回動軸264を中心に前後いずれかの方向に回動する。なお、コイル244は、偏平コイルであってもよい。
【0022】
コントローラ3は、図5に示すように、略方形状の箱型に形成され、その主表面には、電源スイッチ31、速度スイッチ32、方向ボタン33、モード切替ボタン34及びステータスランプ35が配設されている。
このうち、電源スイッチ31は、電源のON/OFFを切り替えるスイッチである。
【0023】
速度スイッチ32は、玩具本体2の歩行速度を高速(High),中速(Mid),低速(Low)の3段階に切り替える他、この速度制御が有効な通常制御状態から玩具本体2が自動歩行するAUTO状態への切り替えを行うスイッチである。
【0024】
方向ボタン33は、左右に押下可能なボタンであり、押下した左右いずれかの方向に玩具本体2の進行方向を変えるボタンである。但し、この方向ボタン33による操作は、速度スイッチ32がHigh、Mid及びLowのいずれかにセットされているとき、つまり玩具本体2が通常制御状態に設定されているときに有効となる。
【0025】
モード切替ボタン34は、AUTO状態における玩具本体2の駆動モードを後述の「前進」,「回避」,「追尾」のいずれかに切り替えるボタンであり、押下する毎にこの順に駆動モードが切り替わる。但し、このモード切替ボタン34による操作は、速度スイッチ32により玩具本体2がAUTO状態に設定されているときにのみ有効となる。
【0026】
ステータスランプ35は、玩具本体2の制御状態等を示す二つのランプであり、本実施の形態においては、玩具本体2が通常制御状態のときに一方のランプが青色点灯し、AUTO状態のときに他方のランプが点灯する。AUTO状態のうち「前進」、「回避」及び「追尾」のいずれの駆動モードに設定されているかは、各駆動モードに対応した他方のランプの点灯色によって識別できる。また、ステータスランプ35は、電源がOFFのときに消灯する他、後述するように玩具本体2が充電されているときには緑色点灯し、充電が完了すると消灯する。
【0027】
また、コントローラ3の前面には、図6(a)に示すように、制御信号が発信される発光素子36と、玩具本体2の電池221へ給電するための給電用端子37,37が配設されている。このうち、給電用端子37,37は、コントローラ3内部に収納されたコントローラ用電池(図示せず)と電気的に接続されており、図6(b)に示すように、玩具本体2の充電用端子222,222とそれぞれ当接されることにより、コントローラ用電池が玩具本体2の電池221へ給電するように構成されている。
【0028】
この給電用端子37,37は、充電用端子222,222に対して吸引力を作用させるマグネットで形成されている。これにより、両端子を当接させやすくするとともに、充電中に離れることを防止している。
また、給電用端子37,37の下方には、規制板38が張り出されている。この規制板38は、給電用端子37,37が充電用端子222,222と当接するときに、その前面が玩具本体2の足部242,242と当接するように形成されている。この規制板38により、玩具本体2が前後方向に傾斜して一方の充電用端子222だけが給電用端子37と当接してしまう状態を防止している。
【0029】
また、コントローラ3の主表面であって上述のボタン群の後面側には、ドーム状の開閉ケース39が設けられている。この開閉ケース39は、図7に示すように、端部を中心に回動可能に設けられるとともに、内部のコントローラ3主表面には玩具本体2の上面視形状の凹部391が形成されており、この凹部391に玩具本体2を収容できるようになっている。
【0030】
続いて、玩具本体2の制御構成について図8を参照して説明する。図8は、玩具本体2の制御構成を示すブロック図である。
【0031】
この図に示すように、玩具本体2は通電制御手段28を備えている。通電制御手段28は、赤外線受信部211、赤外線発信部212、電池221及びコイル244と接続され、赤外線受信部211が受信した制御信号又は赤外線に基づいて、赤外線発信部212,212からの赤外線の発信やコイル244への通電を制御する。
【0032】
続いて、玩具本体2の動作について説明する。
玩具本体2の動作の種類は、上述した通常制御状態とAUTO状態とに大別でき、このうちAUTO状態は、「前進」、「回避」及び「追尾」の三つの駆動モードに分けられる。
【0033】
通常制御状態での玩具本体2の動作は、コントローラ3の電源スイッチ31をON、速度スイッチ32をHigh、Mid及びLowのいずれかにセットしたときに可能となる。この状態では、通電制御手段28が、脚部24,24のコイル244,244に対し左右で通電方向の異なる電流を当該通電方向が交互に逆転するように通電させることにより、左右の脚部24,24が交互に回動されて玩具本体2が前進歩行する。
【0034】
このとき、通電される電流量は速度スイッチ32の設定に応じて制御され、玩具本体2は当該設定に応じた速度で歩行する。また、この状態では、方向ボタン33を左右いずれかに押下することにより、コイル244,244へ通電される電流量又は通電方向の逆転する時間間隔が制御され、押下されたボタンの方向へ玩具本体2が進行方向を変化させる。
【0035】
AUTO状態での玩具本体2の動作は、コントローラ3の電源スイッチ31をON、速度スイッチ32をAUTO状態の位置にセットしたときに可能となる。このAUTO状態では、玩具本体2の歩行速度は切り替えられず、所定の速度に設定される。
【0036】
AUTO状態のうち「前進」モードでの玩具本体2の動作は、速度スイッチ32をAUTO状態の位置にセットした後、モード切替ボタン34を押下してステータスランプ35のうちの他方のランプを当該「前進」モードに対応した色に点灯させることにより可能となる。この「前進」モードでの動作は、方向ボタン33による操作が無効となった場合の通常制御状態での動作と同様であり、玩具本体2はひたすら前進歩行を続ける。
【0037】
「回避」モードでの玩具本体2の動作は、「前進」モードへの切り替えと同様の操作により、ステータスランプ35のうちの他方のランプを当該「回避」モードに対応した色に点灯させることにより可能となる。このモードに設定されると、通電制御手段28は、赤外線発信部212,212から左右で波長の異なる赤外線を発信させる。赤外線の照射範囲に物体が存在すると、この物体で反射された赤外線が赤外線受信部211に受信される。そして、通電制御手段28は、受信された赤外線の波長を識別することにより左右どちらに物体が存在するかとともに当該物体を障害物として認識し、コイル244,244へ通電される電流量又は通電方向の逆転する時間間隔を制御して、この物体を回避する方向に玩具本体2の進行方向を変化させる。
【0038】
「追尾」モードでの玩具本体2の動作は、「前進」モードへの切り替えと同様の操作により、ステータスランプ35のうちの他方のランプを当該「追尾」モードに対応した色に点灯させることにより可能となる。このモードに設定されると、通電制御手段28は、赤外線発信部212,212から左右で波長の異なる赤外線を発信させる。赤外線の照射範囲に物体が存在すると、この物体で反射された赤外線が赤外線受信部211に受信される。そして、通電制御手段28は、受信された赤外線の波長を識別することにより左右どちらに物体が存在するかを認識し、コイル244,244へ通電される電流量又は通電方向の逆転する時間間隔を制御して、この物体を追尾する方向に玩具本体2の進行方向を変化させる。
【0039】
また、「追尾」モードでは、コントローラ3を玩具本体2の移動平面上に載置しておくことで、玩具本体2がコントローラ3の発光素子36を検知して追尾し、自動的に充電用端子222,222と給電用端子37,37とが当接する図6(b)の状態となって、電池221が充電される。
【0040】
以上のように、本発明に係るロボット玩具1によれば、基板251は主面が玩具本体2の正面を向くように玩具本体2の内部に起立して設置され、玩具本体2の内部空間27は基板251の主面側で上部空間273、中部空間274及び下部空間275に仕切られ、このうち下部空間275にはコイル244を有する左右の脚部24,24が設けられ、上部空間273及び中部空間274には赤外線受信部211及び電池221が振り分けられて設置される。このような簡易な構造により、コイル244、電池221及び赤外線受信部211の各部品を、比較的に高くすることが許容される上下方向に分けて玩具本体2の幅や前後方向の厚さを小さく抑えつつ、基板251の主面の近傍に配置して配線を短くすることができる。したがって、簡易な構造により小型化することができる。
【0041】
なお、上記実施の形態においては、赤外線発信部212,212は左右で異なる波長の赤外線を発信するものとして記載したが、異なるタイミングで同じ波長の赤外線を発信するものとしてもよい。この場合、通電制御手段28は、反射された赤外線が赤外線受信部211に受信されるタイミングを識別することで、左右どちらに物体が存在するかを認識できる。
【0042】
また、上記実施の形態においては、内部空間27のうち正面側空間271は、上部空間273、中部空間274及び下部空間275の三つの空間に仕切られるものとして記載したが、少なくとも二つの空間に仕切られていればよい。二つの空間に仕切られた場合には、下側の空間に脚部24,24や永久磁石223を設け、上側の空間に電池221や赤外線受信部211を設ければよい。
【0043】
また、その他の点においても、本発明は上記実施の形態に限定されるものではなく、適宜変更可能であるのは勿論である。
【図面の簡単な説明】
【0044】
【図1】本実施の形態におけるロボット玩具の外観図である。
【図2】玩具本体の側断面図である。
【図3】下部空間の右室内の分解斜視図である。
【図4】コイルの配置を説明するための断面図である。
【図5】赤外線コントローラの上面図である。
【図6】赤外線コントローラの(a)正面図であり、(b)玩具本体を充電するときの側面図である。
【図7】玩具本体を収納した状態の赤外線コントローラの上面図である。
【図8】玩具本体の制御構成を示すブロック図である。
【符号の説明】
【0045】
1 ロボット玩具
2 玩具本体
3 赤外線コントローラ
22 胴部
24 脚部
27 内部空間
28 通電制御手段
37 給電用端子
211 赤外線受信部
212 赤外線発信部
221 電池
222 充電用端子
223 永久磁石
242 足部
244 コイル
251 制御基板
261 上部仕切板
262 下部仕切板
263 仕切壁
264 回動軸
273 上部空間
274 中部空間
275 下部空間
276 左室
277 右室
【特許請求の範囲】
【請求項1】
赤外線コントローラと、
電源である電池、及び前記赤外線コントローラからの制御信号を受信する赤外線受信部を有し、前記制御信号によって駆動制御される玩具本体と、
を備えるロボット玩具において、
前記玩具本体は、
前記玩具本体の内部に主面が当該玩具本体の正面を向くように起立して設置された制御基板と、
前記玩具本体の内部空間を前記制御基板の主面側で上下方向に少なくとも二つの空間に仕切る仕切板と、
前記少なくとも二つの空間のうち最下の空間を左室及び右室に仕切る仕切壁と、
前記左室及び前記右室へ所定の磁極が向くように設置された永久磁石と、
前記少なくとも二つの空間のうち前記最下の空間を除く空間に設置された前記電池及び前記赤外線受信部と、
前記左室及び前記右室にそれぞれの基端部が挿入され、前記仕切壁に設けられた軸を中心に前後方向に回動可能に設置されるとともに、各足部が前記玩具本体の下方から露出する左右の脚部と、
通電方向により磁極の変化する面が前記永久磁石に対向するように前記左右の脚部にそれぞれ設置されたコイルと、
前記制御基板に設置され、前記赤外線受信部で受信される前記制御信号に基づいて前記コイルの通電制御を行う通電制御手段と、
を備えることを特徴とするロボット玩具。
【請求項2】
前記電池は、充電可能なリチウムイオン電池であることを特徴とする請求項1に記載のロボット玩具。
【請求項3】
前記玩具本体の正面側には前記リチウムイオン電池を充電するための充電用端子が露出して設けられることを特徴とする請求項2に記載のロボット玩具。
【請求項4】
前記赤外線コントローラには、前記リチウムイオン電池へ給電するために前記充電用端子と当接される給電用端子が設けられることを特徴とする請求項3に記載のロボット玩具。
【請求項5】
前記玩具本体には、前記赤外線受信部の左右に、前方の物体に向けて赤外線を発信する赤外線発信部が設けられ、
前記通電制御手段は、回避モードを有し、当該回避モードでは、前記赤外線受信部で受信される前記赤外線に基づく前記物体の検知結果に応じて、当該物体を避ける方向へ前記玩具本体が進行するように前記コイルの通電制御を行うことを特徴とする請求項1〜4のいずれか一項に記載のロボット玩具。
【請求項6】
前記玩具本体には、前記赤外線受信部の左右に、前方の物体に向けて赤外線を発信する赤外線発信部が設けられ、
前記通電制御手段は、追尾モードを有し、当該追尾モードでは、前記赤外線受信部で受信される前記赤外線に基づく前記物体の検知結果に応じて、当該物体を追尾する方向へ前記玩具本体が進行するように前記コイルの通電制御を行うことを特徴とする請求項1〜5のいずれか一項に記載のロボット玩具。
【請求項1】
赤外線コントローラと、
電源である電池、及び前記赤外線コントローラからの制御信号を受信する赤外線受信部を有し、前記制御信号によって駆動制御される玩具本体と、
を備えるロボット玩具において、
前記玩具本体は、
前記玩具本体の内部に主面が当該玩具本体の正面を向くように起立して設置された制御基板と、
前記玩具本体の内部空間を前記制御基板の主面側で上下方向に少なくとも二つの空間に仕切る仕切板と、
前記少なくとも二つの空間のうち最下の空間を左室及び右室に仕切る仕切壁と、
前記左室及び前記右室へ所定の磁極が向くように設置された永久磁石と、
前記少なくとも二つの空間のうち前記最下の空間を除く空間に設置された前記電池及び前記赤外線受信部と、
前記左室及び前記右室にそれぞれの基端部が挿入され、前記仕切壁に設けられた軸を中心に前後方向に回動可能に設置されるとともに、各足部が前記玩具本体の下方から露出する左右の脚部と、
通電方向により磁極の変化する面が前記永久磁石に対向するように前記左右の脚部にそれぞれ設置されたコイルと、
前記制御基板に設置され、前記赤外線受信部で受信される前記制御信号に基づいて前記コイルの通電制御を行う通電制御手段と、
を備えることを特徴とするロボット玩具。
【請求項2】
前記電池は、充電可能なリチウムイオン電池であることを特徴とする請求項1に記載のロボット玩具。
【請求項3】
前記玩具本体の正面側には前記リチウムイオン電池を充電するための充電用端子が露出して設けられることを特徴とする請求項2に記載のロボット玩具。
【請求項4】
前記赤外線コントローラには、前記リチウムイオン電池へ給電するために前記充電用端子と当接される給電用端子が設けられることを特徴とする請求項3に記載のロボット玩具。
【請求項5】
前記玩具本体には、前記赤外線受信部の左右に、前方の物体に向けて赤外線を発信する赤外線発信部が設けられ、
前記通電制御手段は、回避モードを有し、当該回避モードでは、前記赤外線受信部で受信される前記赤外線に基づく前記物体の検知結果に応じて、当該物体を避ける方向へ前記玩具本体が進行するように前記コイルの通電制御を行うことを特徴とする請求項1〜4のいずれか一項に記載のロボット玩具。
【請求項6】
前記玩具本体には、前記赤外線受信部の左右に、前方の物体に向けて赤外線を発信する赤外線発信部が設けられ、
前記通電制御手段は、追尾モードを有し、当該追尾モードでは、前記赤外線受信部で受信される前記赤外線に基づく前記物体の検知結果に応じて、当該物体を追尾する方向へ前記玩具本体が進行するように前記コイルの通電制御を行うことを特徴とする請求項1〜5のいずれか一項に記載のロボット玩具。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2010−88653(P2010−88653A)
【公開日】平成22年4月22日(2010.4.22)
【国際特許分類】
【出願番号】特願2008−261511(P2008−261511)
【出願日】平成20年10月8日(2008.10.8)
【出願人】(000003584)株式会社タカラトミー (248)
【Fターム(参考)】
【公開日】平成22年4月22日(2010.4.22)
【国際特許分類】
【出願日】平成20年10月8日(2008.10.8)
【出願人】(000003584)株式会社タカラトミー (248)
【Fターム(参考)】
[ Back to top ]