
ロボット用外装部品
【課題】本発明は、ロボット用外装部品の生産性と物性バランスとを従来技術に比して損なうことなく、特殊な使用環境下での耐久性と意匠性のための外観保持性とに優れたロボット用外装部品を提供することを目的とする。
【解決手段】本発明のロボット用外装部品は、オキシメチレンコポリマー(A)と充填材(B)と脂肪酸(C)とを含むオキシメチレン樹脂組成物を含有する。また、該オキシメチレンコポリマー(A)が、オキシメチレン成分と、該オキシメチレン成分以外のオキシアルキレン成分とを含み、該オキシアルキレン成分の含有割合が、該オキシメチレン成分に対して、0.3〜1.3モル%であることが好ましい。
【解決手段】本発明のロボット用外装部品は、オキシメチレンコポリマー(A)と充填材(B)と脂肪酸(C)とを含むオキシメチレン樹脂組成物を含有する。また、該オキシメチレンコポリマー(A)が、オキシメチレン成分と、該オキシメチレン成分以外のオキシアルキレン成分とを含み、該オキシアルキレン成分の含有割合が、該オキシメチレン成分に対して、0.3〜1.3モル%であることが好ましい。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ロボット用外装部品に関する。
【背景技術】
【0002】
オキシメチレン樹脂は、バランスのとれた機械物性と成形加工性とを有するため、機械部品、電機・電子部品および自動車部品のような広範囲の用途に用いられている。しかし、工業部品や自動車部品などで継続的に紫外線や風雨の影響などを受ける用途においては、耐久性の低下や外観の悪化により、この使用を制限されることがある。一方、近年ロボット分野においては、制御技術の革新や市場の拡大、コストダウンの要求に伴い、ロボットを構成する材料について、樹脂による軽量化の検討が進んできている。
【0003】
ロボット分野の外装部品において、これまでオキシメチレン樹脂を使用したロボットに関する部品としては、例えば、樹脂製のホルダ(例えば、特許文献1参照)や繊維強化樹脂(FRP)製のロボットハンド(例えば、特許文献2参照)などが提案されている。
【0004】
また、オキシメチレン樹脂の外観の向上については、例えば、特定の強化用充填材と特定のアルカリ金属とを含むポリアセタール樹脂組成物(例えば、特許文献3参照)、シラン粘土複合体を含有するポリアセタール樹脂組成物(例えば、特許文献4参照)、ポリエチレンや立体障害性フェノールなどを含有してなり、かつメルトインデックスが1.0〜30.0g/10分である押出し成形用ポリアセタール樹脂組成物(例えば、特許文献5参照)などが提案されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2001−179142号公報
【特許文献2】特開2006−289591号公報
【特許文献3】特開平7−179720号公報
【特許文献4】特開2000−290467号公報
【特許文献5】特開2004−149670号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上記特許文献1〜5に開示された技術では、ロボット用外装部品に必要な剛性と靭性とのバランス(以下、「物性バランス」とも記載する)、特殊な使用環境下での耐久性、意匠性のための外観保持性などが充分とはいえない。
【0007】
そこで本発明は、ロボット用外装部品の生産性と物性バランスとを従来技術に比して損なうことなく、特殊な使用環境下での耐久性と意匠性のための外観保持性(以下、「耐久性など」とも記載する)とに優れたロボット用外装部品を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明者らは、上記課題を解決するために鋭意検討を重ねた。その結果、特定のオキシメチレン樹脂組成物を含有するロボット用外装部品が、特殊な使用環境下での耐久性などにおいて従来技術よりも優れることを見出し、本発明を完成させるに至った。
【0009】
すなわち、本発明は、下記のとおりである。
【0010】
[1]
オキシメチレンコポリマー(A)と充填材(B)と脂肪酸(C)とを含むオキシメチレン樹脂組成物を含有するロボット用外装部品。
【0011】
[2]
該オキシメチレンコポリマー(A)が、オキシメチレン成分と、該オキシメチレン成分以外のオキシアルキレン成分とを含み、
該オキシアルキレン成分の含有割合が、該オキシメチレン成分に対して、0.3〜1.3モル%である、[1]記載のロボット用外装部品。
【0012】
[3]
該充填材(B)の含有量が12〜35質量%であるオキシメチレン樹脂組成物を含有する、[1]または[2]記載のロボット用外装部品。
【0013】
[4]
該充填材(B)が、全充填材の質量に対する60%以上が平均粒径0.04〜0.8μmの無機酸塩系充填材である、[1]〜[3]のいずれか記載のロボット用外装部品。
【0014】
[5]
該充填材(B)が、炭酸塩系充填材および珪酸塩系充填材を含む、[1]〜[4]のいずれか記載のロボット用外装部品。
【0015】
[6]
該充填材(B)が、JIS K5101試験法によるpHが9.2以上10.0以下であり、かつ表面処理がなされていない炭酸カルシウムを含む、[1]〜[5]のいずれか記載のロボット用外装部品。
【0016】
[7]
該脂肪酸(C)と該充填材(B)との質量比[(C)/(B)]が0.027〜0.06である、[1]〜[6]のいずれか記載のロボット用外装部品。
【0017】
[8]
該脂肪酸(C)が、炭素数12〜27の1価の脂肪酸(C1)と、炭素数28〜36の1価の脂肪酸(C2)とを含む、[1]〜[7]のいずれか記載のロボット用外装部品。
【0018】
[9]
該脂肪酸(C1)と該脂肪酸(C2)との質量比[(C1)/(C2)]が1〜5である、[8]記載のロボット用外装部品。
【0019】
[10]
該オキシメチレン樹脂組成物が、さらに脂肪酸のカルシウム塩(D)を含む、[1]〜[9]のいずれか記載のロボット用外装部品。
【0020】
[11]
該脂肪酸(C)と該脂肪酸のカルシウム塩(D)との質量比[(C)/(D)]が4〜15である、[10]記載のロボット用外装部品。
【0021】
[12]
油、グリース、洗剤および溶剤からなる群より選択される少なくとも1種と接触する外装部品として使用する、[1]〜[11]のいずれか記載のロボット用外装部品。
【0022】
[13]
該ロボットが、OA機器、音楽機器、映像機器、情報通信機器、電気電子機器、自動車、工業機器、農業機器、医療用機器、医薬品加工機器、食品加工機器、住宅用機器および衛生用機器からなる群より選択される少なくとも1種の本体または該本体の部品を生産するためのロボットである、[1]〜[12]のいずれか記載のロボット用外装部品。
【発明の効果】
【0023】
本発明によれば、ロボット用外装部品の生産性と物性バランスとを従来技術に比して損なうことなく、従来技術よりも耐久性などに優れるロボット用外装部品を提供することができる。
【図面の簡単な説明】
【0024】
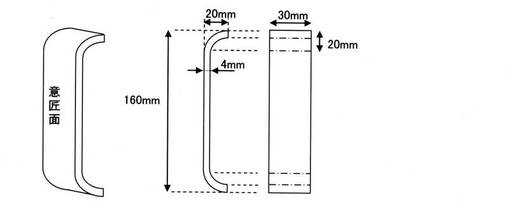
【図1】実施例および比較例で作製した成形片の形状を示す図である。
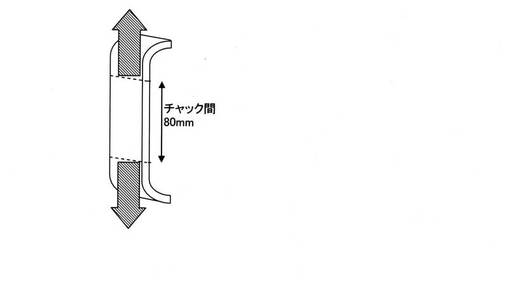
【図2】実施例および比較例で作製した成形片の物性バランスの評価を行った部分を示す図である。
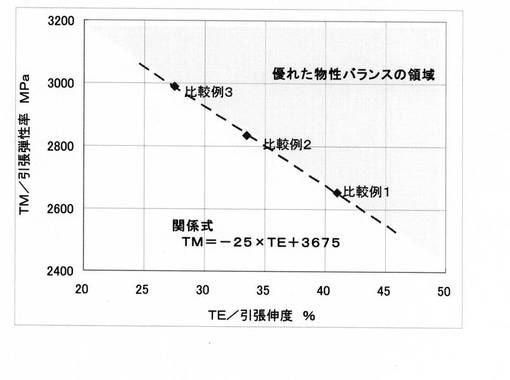
【図3】比較例1〜3で作製した成形片の引張弾性率と引張伸度との関係および優れた物性バランスの領域を示す図である。
【発明を実施するための形態】
【0025】
以下、本発明を実施するための形態(以下、「本実施の形態」という。)について詳細に説明する。なお、本発明は、以下の実施の形態に限定されるものではなく、その要旨の範囲内で種々変形して実施することができる。
【0026】
以下では、ロボット用外装部品、当該ロボット用外装部品を構成する樹脂組成物、当該ロボット用外装部品の製造方法、当該ロボット用外装部品の使用方法の順に説明する。
【0027】
[1.ロボット用外装部品]
本実施の形態のロボット用外装部品とは、ロボットの外側に装備されて使用される部品、および/またはロボットの人から見えるところに装備される部品のことをいう。
【0028】
当該ロボットとは、「ある程度自律的に連続した自動作業を行う機械」および/または「人に近い形および機能を持つ機械」である。例えば、自動販売機、自動券売機、自動改札機や自動選別機などの自動機であったり、産業用ロボット、家事手伝いロボット、医療用または介護用ロボット、案内用または災害救助用ロボット、愛玩用または戦闘用ロボットなどである。また広義の意味では、人間の動作(作用のための力や移動のための速度)を補助するパワードスーツやロボットスーツ、ロボットカーなどを含むものである。
【0029】
[2.ロボット用外装部品を構成する樹脂組成物]
本実施の形態のロボット用外装部品を構成する樹脂組成物について、以下に説明する。当該ロボット用外装部品は、特定のオキシメチレン樹脂組成物を含有する。また、当該ロボット用外装部品は、例えば、特定のオキシメチレン樹脂組成物を成形することにより得られる。かかるオキシメチレン樹脂組成物は、下記のオキシメチレンコポリマー(A)、充填材(B)および脂肪酸(C)を含む。
【0030】
1.オキシメチレンコポリマー(A)
オキシメチレンコポリマー(A)は、例えば、下記の工程(1)および(2)により得ることができる。
【0031】
(1)重合工程
オキシメチレンコポリマー(A)とは、オキシメチレン基を主鎖に有し、分子中に炭素数2以上のオキシアルキレンユニットを有する重合体を表す。本実施の形態においては、ロボット用外装部品の生産性や物性バランスを維持し耐久性などを向上させるため、オキシメチレンホモポリマーではなく、オキシメチレンコポリマーを用いる。
【0032】
オキシメチレンコポリマー(A)を得る際の重合の形態は、本実施の形態で説明する部分以外は、公知の重合法(例えば、US−A−3027352、US−A−3803094、DE−C−1161421、DE−C−1495228、DE−C−1720358、DE−C−3018898、特開昭58−98322号公報、および特開平7-70267号公報に記載)を用いて実施することができる。かかる重合工程により、オキシメチレンコポリマー(A)の粗ポリマーが得られる。
【0033】
以下、オキシメチレンコポリマー(A)を得る際の本重合工程において用いられるモノマー等の材料を詳細に説明する。
【0034】
(モノマー)
主モノマーは、ホルムアルデヒドまたはその3量体であるトリオキサン若しくは4量体であるテトラオキサン等の環状オリゴマーを用いることが好ましい。ここで、本明細書における「主モノマー」とは、全モノマー量に対して50質量%以上含有されているモノマー成分をいう。
【0035】
コモノマーは、分子中に炭素数2以上のオキシアルキレンユニットを有する環状エーテル化合物を用いることが好ましい。かかる環状エーテル化合物として、好ましくは、エチレンオキシド、プロピレンオキシド、1,3−ジオキソラン、1,3−プロパンジオールホルマール、1,4−ブタンジオールホルマール、1,5−ペンタンジオールホルマール、1,6−ヘキサンジオールホルマール、ジエチレングリコールホルマール、1,3,5−トリオキセパン、1,3,6−トリオキオカン、および、分子に分岐もしくは架橋構造を構成しうるモノ−もしくはジ−グリシジル化合物からなる群より選ばれる1種の化合物または2種以上の混合物が挙げられる。
【0036】
オキシメチレンコポリマー(A)の主モノマーおよびコモノマーにおいて、水、メタノールおよび蟻酸といった重合反応中の重合停止作用および連鎖移動作用を有する不純物を極力含まないものを用いることが好ましい。これらの不純物を極力含まない主モノマーおよびコモノマーを用いることにより、予期せぬ連鎖移動反応を回避でき、これにより所望の分子量を有するポリマーが得られる。特に、ポリマー末端基に水酸基を誘導する不純物の含有量は、全モノマー量に対して、好ましくは30質量ppm以下、より好ましくは10質量ppm以下、さらに好ましくは3質量ppm以下である。所望の低不純物の主モノマーおよびコモノマーを得るための方法としては、公知の方法(例えば、主モノマーについては特開平3−123777号公報や特開平7−33761号公報、コモノマーについては特開昭49−62469号公報や特開平5−271217号公報に記載)を用いることができる。
【0037】
(連鎖移動剤)
オキシメチレンコポリマー(A)を得る際の重合において連鎖移動剤を用いてもよい。該連鎖移動剤としては、公知の成分、例えば、アルキル基がメチル、エチル、プロピル、イソプロピルおよびブチル等の低級脂肪族アルキル基であるホルムアルデヒドのジアルキルアセタールおよびそのオリゴマー、ならびにメタノール、エタノール、プロパノール、イソプロパノールおよびブタノール等の低級脂肪族アルコールを用いることが好ましい。長鎖分岐オキシメチレンコポリマー(A)を得るために、ポリエーテルポリオール、およびポリエーテルポリオールのアルキレンオキサイド付加物を用いてもよい。
【0038】
また、オキシメチレンコポリマー(A)のブロックコポリマーを得るために、ヒドロキシル基、カルボキシル基、アミノ基、エステル基およびアルコキシ基からなる群より選択される1種以上の基を有する重合体を連鎖移動させてもよい。さらに上記連鎖移動剤を2種以上使用してもよい。何れの場合にしても、できるだけ不安定末端数の少ないものが好ましい。
【0039】
(重合触媒)
オキシメチレンコポリマー(A)を得る際の重合触媒としては、ルイス酸、プロトン酸、およびプロトン酸のエステルまたは無水物等の、カチオン活性触媒が好ましい。
【0040】
ルイス酸としては、特に限定されないが、例えば、ホウ酸、スズ、チタン、リン、ヒ素およびアンチモンのハロゲン化物が挙げられる。これらの具体例として、特に限定されないが、三フッ化ホウ素、四塩化スズ、四塩化チタン、五フッ化リン、五塩化リンおよび五フッ化アンチモン、並びにそれらの錯化合物もしくは塩が挙げられる。
【0041】
また、プロトン酸、そのエステルまたは無水物の具体例としては、特に限定されないが、パークロル酸、トリフルオロメタンスルホン酸、パークロル酸−3級ブチルエステル、アセチルパークロラート、およびトリメチルオキソニウムヘキサフルオロホスフェートが挙げられる。これらの中でも、三フッ化ホウ素;三フッ化ホウ素水和物;酸素原子または硫黄原子を含む有機化合物と三フッ化ホウ素との配位錯化合物が好ましく、具体的には、三フッ化ホウ素ジエチルエーテル、三フッ化ホウ素ジ−n−ブチルエーテルを好適に挙げることができる。
【0042】
これらの重合触媒の使用量は、例えばモノマーとして、トリオキサンと環状エーテルおよび/または環状ホルマールとを用いる場合、モノマーの合計量1モルに対して、1×10-6モル〜1×10-3モルが好ましく、5×10-6モル〜1×10-4モルがより好ましい。重合触媒の使用量が上記範囲内であると、重合時の反応安定性や得られるロボット用外装部品の生産性を維持し易くなる。
【0043】
重合触媒の失活は、触媒中和失活剤を含む水溶液または有機溶剤溶液中に重合物を投入し、スラリー状態で一般的には数分〜数時間攪拌することにより行うことができる。かかる触媒中和失活剤の具体例として、特に限定されないが、アンモニア、トリエチルアミンおよびトリ−n−ブチルアミン等のアミン類、ならびにアルカリ金属およびアルカリ土類金属の、水酸化物、無機酸塩および有機酸塩からなる群より選択される1種以上が挙げられる。
【0044】
また、アンモニアおよびトリエチルアミン等の蒸気とオキシメチレンコポリマー(A)とを接触させて重合触媒を失活させる方法や、ヒンダードアミン類、トリフェニルホスフィンおよび水酸化カルシウムのうち少なくとも1種と混合機で接触させることにより触媒を失活させる方法も用いることができる。
【0045】
(2)末端安定化および造粒工程
末端安定化させたオキシメチレンコポリマー(A)は、上記工程により得られた粗ポリマーに含まれる不安定末端部分を分解除去することによって得られる。この不安定末端部分の分解除去方法としては、特に限定されないが、例えば、ベント付き単軸スクリュー式押出機やベント付き2軸スクリュー式押出機等を用いて、公知の塩基性物質である分解除去剤の存在下、粗ポリマーを溶融して不安定末端部分を分解除去することができる。末端安定化における溶融混練を行う場合には、品質や作業環境の保持のために、不活性ガスによる置換、ならびに一段および多段ベントによる脱気をすることが好ましい。
【0046】
溶融混練の温度は、オキシメチレンコポリマー(A)の融点以上260℃以下で行うことが好ましい。さらに、通常のオキシメチレン樹脂に添加することの可能な公知の安定剤を加えながら溶融混合し、造粒を行うことが好ましい。
【0047】
(不安定末端部分の分解除去剤)
不安定末端部分の分解除去剤として、特に限定されないが、例えばアンモニア、トリエチルアミンおよびトリブチルアミン等の脂肪族アミン、ならびに水酸化カルシウム等のアルカリ金属またはアルカリ土類金属の、水酸化物、無機弱酸塩および有機弱酸塩等の、公知の塩基性物質が挙げられる。
【0048】
上記分解除去剤の中でも、好ましくは、下記一般式(1)で表される少なくとも一種の第4級アンモニウム化合物である。そして、かかる第4級アンモニウム化合物を用いて、熱的に不安定な末端を処理する方法が好適に利用できる。なぜなら、上記方法で安定化させたオキシメチレンコポリマー(A)中には、殆ど不安定な末端部が残っていないためである。
【0049】
【化1】

(式中、R1、R2、R3およびR4は、各々独立して、炭素数1〜30の非置換アルキル基または置換アルキル基;炭素数6〜20の非置換アリール基または置換アリール基;炭素数1〜30の非置換アルキル基または置換アルキル基が少なくとも1個の炭素数6〜20のアリール基で置換されたアラルキル基または置換アラルキル基;炭素数6〜20のアリール基が少なくとも1個の炭素数1〜30の非置換アルキル基または置換アルキル基で置換されたアルキルアリール基または置換アルキルアリール基を表す。上記の非置換アルキル基または置換アルキル基は直鎖状、分岐状、または環状である。また上記の置換アルキル基、置換アリール基、置換アラルキル基、置換アルキルアリール基は、非置換アルキル基、アリール基、アラルキル基、およびアルキルアリール基の水素原子がハロゲンで置換されたものでもよい。nは1〜3の整数を表す。Xは水酸基、または炭素数1〜20のカルボン酸、水素酸、オキソ酸無機チオ酸もしくは炭素数1〜20の有機チオ酸の酸残基を表す。)
上記第4級アンモニウム塩の化合物の具体例として、特に限定されないが、テトラメチルアンモニウム、テトラエチルアンモニウム、テトラプロピルアンモニウム、テトラ−n−ブチルアンモニウム、セチルトリメチルアンモニウム、テトラデシルトリメチルアンモニウム、1,6−ヘキサメチレンビス(トリメチルアンモニウム)、デカメチレン−ビス−(トリメチルアンモニウム)、トリメチル−3−クロロ−2−ヒドロキシプロピルアンモニウム、トリメチル(2−ヒドロキシエチル)アンモニウム、トリエチル(2−ヒドロキシエチル)アンモニウム、トリプロピル(2−ヒドロキシエチル)アンモニウム、トリ−n−ブチル(2−ヒドロキシエチル)アンモニウム、トリメチルベンジルアンモニウム、トリエチルベンジルアンモニウム、トリプロピルベンジルアンモニウム、トリ−n−ブチルベンジルアンモニウム、トリメチルフェニルアンモニウム、トリエチルフェニルアンモニウム、トリメチル−2−オキシエチルアンモニウム、モノメチルトリヒドロキシエチルアンモニウム、モノエチルトリヒドロキシエチルアンモニウム、オクダデシルトリ(2−ヒドロキシエチル)アンモニウム、テトラキス(ヒドロキシエチル)アンモニウム等の水酸化物が挙げられる。
【0050】
また、上記具体例として、特に限定されないが、アジ化水素などのハロゲン化以外の水素酸塩;硫酸、硝酸、燐酸、炭酸、ホウ酸、塩素酸、よう素酸、珪酸、過塩素酸、亜塩素酸、次亜塩素酸、クロロ硫酸、アミド硫酸、二硫酸、トリポリ燐酸などのオキソ酸塩;チオ硫酸などのチオ酸塩;蟻酸、酢酸、プロピオン酸、ブタン酸、イソ酪酸、ペンタン酸、カプロン酸、カプリル酸、カプリン酸、安息香酸、シュウ酸などのカルボン酸塩も挙げられる。
【0051】
これらの中でも、水酸化物(OH-)、硫酸(HSO4-、SO42-)、炭酸(HCO3-、CO32-)、ホウ酸(B(OH)4-)、およびカルボン酸の塩が好ましい。かかるカルボン酸の中でも、蟻酸、酢酸およびプロピオン酸がより好ましい。
【0052】
これらの第4級アンモニウム化合物は、1種単独で用いてもよいし、2種以上を組み合わせて用いてもよい。
【0053】
第4級アンモニウム化合物の添加量は、粗ポリマーに対して、下記数式<1>で表される第4級アンモニウム化合物由来の窒素の量に換算して、0.05〜50質量ppmが好ましい。
【0054】
【数1】
(式中、Pは第4級アンモニウム化合物の粗ポリマーに対する濃度(質量ppm)を表し、「14」は窒素の原子量であり、Qは第4級アンモニウム化合物の分子量を表す。)
第4級アンモニウム化合物は、粗ポリマーを溶融する前に予め添加してもよいし、溶融させた粗ポリマーに添加してもよい。
【0055】
本実施の形態において、公知の分解除去剤であるアンモニア、トリエチルアミンおよびホウ酸化合物と第4級アンモニウム化合物とを併用してもよい。
【0056】
(オキシメチレンコポリマー(A)の組成)
オキシメチレンコポリマー(A)は、オキシメチレン成分と、該オキシメチレン成分以外のオキシアルキレン成分(コモノマーユニット)とを含むことが好ましい。
【0057】
オキシメチレンコポリマー(A)中のオキシアルキレン成分(コモノマーユニット)の含有割合が、オキシメチレン成分(1モル)に対して、0.15〜1.33モル%であることが好ましく、0.3〜1.3モル%であることがより好ましく、さらに好ましくは0.4〜1.2モル%である。上記工程により得られたオキシメチレンコポリマー(A)中では、オキシメチレン成分aに対し、コモノマー成分として、オキシメチレン成分a以外のオキシアルキレン成分bが挿入されている。この成分a(1モル)に対して挿入された成分b(モル数)の割合(モル%)「(b/a)×100」をオキシアルキレン成分(コモノマーユニット)の含有割合という。
【0058】
挿入割合(b/a)×100を上記範囲内にすることで、ロボット用外装部品の生産性や物性バランスを維持し、耐久性などを向上することができる。
【0059】
挿入割合(b/a)×100の定量については、例えば、1H−NMR法を用いる。その手順としては、得られたオキシメチレンコポリマーをヘキサフルオロイソプロパノール(HFIP)により濃度1.5質量%となるように24時間かけて溶解させる。そして、この溶解液を用いて1H−NMR解析を行い、オキシメチレン成分aとオキシメチレン成分a以外のオキシアルキレン成分bとの帰属ピ−クの積分値の比率より挿入割合(b/a)×100を求める。
【0060】
また、オキシメチレンコポリマー(A)のメルトフローレート(ISO1133条件D、190℃)は、2〜45g/10分が好ましく、5〜30g/10分がより好ましく、さらに好ましくは7〜25g/10分である。このため、連鎖移動剤をホルムアルデヒド1モル当たりに換算して0.02〜0.10モル%で重合することにより、上記メルトフローレート(MFR)の調整を行うことができる。オキシメチレンコポリマー(A)のMFRを上記範囲内とすることにより、ロボット用外装部品の生産性や物性バランスを維持し、耐久性などを向上することができる。
【0061】
2.充填材(B)
本実施の形態に用いるオキシメチレン樹脂組成物は、ロボット用外装部品が優れた生産性と物性バランスとを維持し、耐久性などを高めるため、充填材(B)を含む。
【0062】
充填材(B)の含有量は、オキシメチレン樹脂組成物に対し6〜45質量%であることが好ましく、12〜35質量%であることがより好ましく、さらに好ましくは15〜30質量%である。充填材(B)の含有量を前記範囲内とすることにより、より優れた生産性を維持し、耐久性などを高めることができるため、好ましい。
【0063】
この充填材(B)としては、ロボット用外装部品の安定性を維持するという観点から、従来のオキシメチレン樹脂に添加可能な充填材の中から選択することが好ましい。
【0064】
さらにロボット用外装部品の生産性と物性バランスとを維持し、耐久性などを高めるために、充填材(B)としては、無機系充填材や有機系充填材、またはその両方の中から2種類以上を組み合わせて含むことが好ましい。
【0065】
無機系充填材の具体例としては、金属粉(アルミニウム、ステンレス、ニッケル、銀など)、酸化物(酸化ケイ素、酸化鉄、アルミナ、酸化チタン、酸化亜鉛など)、水酸化物(水酸化アルミニウム、水酸化マグネシウム、水酸化カルシウムなど)、珪酸塩(タルク、マイカ、珪酸カルシウム、クレイ、ベントナイトなど)、炭酸塩(炭酸カルシウム、炭酸マグネシウム、ハイドロタルサイトなど)、カーボン系物質(カーボンブラック、黒鉛、カーボンファイバーなど)、硫酸塩、窒化ホウ素、窒化珪素などが挙げられる。
【0066】
有機系充填材の具体例としては、天然物系(リンター、木材、籾殻、絹、皮革など)や合成系(アラミド、テフロン(登録商標)、ビスコースなど)が挙げられる。
【0067】
これらの中でも、無機酸塩系充填材が好ましく、珪酸塩系充填材および炭酸塩系充填材からなる群より選ばれることがより好ましい。充填材(B)としては、炭酸塩系充填材および珪酸塩系充填材を含むことがさらに好ましい。珪酸塩系充填材としては、タルクや珪酸カルシウムが好ましく、炭酸塩系充填材としては、炭酸カルシウムやハイドロタルサイトが好ましい。さらに好ましくは、炭酸カルシウムを含むことが好ましい。入手のし易さや経済的な観点から、このような充填材(B)を用いることが、好ましい。
【0068】
炭酸カルシウムを用いる場合は、軽質炭酸カルシウムであることが好ましい。本実施の形態で用いられる炭酸カルシウム(例えば、軽質炭酸カルシウム)は、JIS K5101試験法によるpHは、好ましくは9.2以上10.0以下であり、より好ましくは9.4以上9.7以下であり、かつ表面処理がなされていないことが好ましい。このような充填材(B)を用いることにより、ロボット用外装部品の生産性や物性バランスを維持し、耐久性などを向上させることができる。軽質炭酸カルシウムの粒子の形状は特に限定されるものではなく、具体的には、球形、立方形、紡鍾形、薄片形、不定形等が挙げられる。これらのうち、ロボット用外装部品の異方性低減、機械的強度向上の観点から、立方形のものが好ましく、粒子の平均長径(L)と平均短径(D)との比であるアスペクト比(L/D)が3以下であるものがより好ましい。また軽質炭酸カルシウムの結晶形態としては、一般的に知られているカルサイト型、アラゴナイト型、パテライト型のいずれであってもよく、これらのうちオキシメチレン樹脂との界面密着性、樹脂組成物の機械的物性のバランス等の観点から、カルサイト型のものが好ましい。軽質炭酸カルシウムは、人工的に合成される軽質炭酸カルシウム(コロイド状炭酸カルシウム、沈降炭酸カルシウム、活性炭酸カルシウムと呼ばれることもある。)が好ましい。これらの中でも、炭酸カルシウム粒子の形状と径とを精密に制御できるという観点から、スラリー状の水酸化カルシウムに二酸化炭素を反応させて製造された軽質炭酸カルシウムが特に好ましい。軽質炭酸カルシウムは、1種を単独で用いてもよいし、2種以上を併用してもよい。さらに、軽質炭酸カルシウムの水銀ポロシメーターを用いた水銀圧入法による最多確率空隙半径は0.12m以上0.16m以下であることが好ましい。当該最多確率空隙半径が0.12m以上であることにより、樹脂組成物中に炭酸カルシウムの凝集体が生成し難く良分散体が得られる傾向にあり、0.16m以下であることにより、樹脂組成物の生産性が高く維持できる傾向にある。
【0069】
ロボット用外装部品の優れた生産性と物性バランスとを維持し、耐久性などを高めるために、充填材(B)は、平均粒径が0.01〜1.0μmの無機酸塩系充填材を含むことが好ましく、0.04〜0.8μmの無機酸塩系充填材を含むことがより好ましく、0.08〜0.4μmの無機酸塩系充填材を含むことがさらに好ましい。このような平均粒径の無機酸塩系充填材の含有量は、全充填材(B)の質量に対して60質量%以上であることが好ましく、70質量%以上であることがより好ましい。このような平均粒径の無機酸塩系充填材の含有量を前記範囲にすることにより、物性バランスを維持し、より耐久性などを高めることをできるため、好ましい。
【0070】
本実施の形態に用いる充填材(B)は、表面処理がされていてもよい。「表面処理」とは、充填材の製造工程や製造後の製品において、粒子の凝集を防止する目的で、公知の表面処理剤、付着剤又は錯化剤、及び凝集防止剤の少なくとも1種が添加され、その結果、該物質によって充填材表面が被覆されていることをいう。ここで、表面処理剤、付着剤又は錯化剤、及び凝集防止剤としては、例えば、アニオン系界面活性剤、カチオン系界面活性剤、両性界面活性剤、非イオン性界面活性剤が挙げられる。また、アミノシラン、エポキシシラン等のシラン系カップリング剤、チタネート系カップリング剤、脂肪酸(飽和脂肪酸及び不飽和脂肪酸)、脂肪族カルボン酸、樹脂酸及び金属セッケンが例示される。本実施の形態において、ロボット用外装部品の生産性を維持し、耐久性などを高めるために、充填材(B)の表面処理は極力少ない方が好ましい。
【0071】
充填材(B)の形状は、粉末状、鱗片状、板状、針状、球状、繊維状、テトラポッド状などの中から選択することが好ましく、特に物性バランスを維持し、効率的に耐久性などを高めるためには、粉末状、鱗片状、板状が好ましい。充填材(B)において、粒子の平均長径(L)と粒子の平均短径(D)との比である平均アスペクト比(L/D)は好ましくは3以下であり、さらに好ましくは2以下である。
【0072】
本実施の形態に用いる充填材(B)の平均粒径(平均長径および平均短径などを含む)は、以下のようにして測定することができる。測定対象となる充填材のサンプリングを行い、サンプリングした粒子を走査型電子顕微鏡(SEM)により倍率1千倍から5万倍で撮影し、得られた画像において無作為に選んだ最低100個の充填材粒子の、それぞれの最大粒径を測定し、得られた各最大粒径の相加平均を平均粒径として求める。
【0073】
3.脂肪酸(C)
本実施の形態に用いるオキシメチレン樹脂組成物は、ロボット用外装部品の生産性や物性バランスを維持し、耐久性などを高めるために脂肪酸(C)を含む。
【0074】
この脂肪酸(C)の量としては、質量比[脂肪酸(C)/充填材(B)]が、0.023〜0.1であることが好ましく、0.027〜0.06であることがより好ましく、さらに好ましくは0.03〜0.05である。質量比[脂肪酸(C)/充填材(B)]を前記範囲内とすることにより、生産性を維持することができるため、好ましい。
【0075】
本実施の形態に用いる脂肪酸(C)は、脂肪族基を有する一価または多価カルボン酸、およびこれらの一部に水酸基等の置換基が導入されているもの、またはこれらの酸の酸無水物であることが好ましく、公知のものであれば特に限定されない。例えば、飽和脂肪酸として、酢酸、プロピオン酸、酪酸、吉草酸、カプロン酸、カプリル酸、ラウリン酸、トリデシル酸、ミリスチル酸、パルミチン酸、ヘプタデシル酸、ステアリン酸、ピバリン酸、イソブチル酸、さらにはエチレンジアミン四酢酸などを、不飽和脂肪酸として、オレイン酸、エライジン酸、エルカ酸、リノール酸、リシノール酸などを、脂環式カルボン酸としてナフテン酸などを挙げることができる。これらの中から1種類、または2種類以上を用いてもかまわない。
【0076】
これらのうち、ロボット用外装部品の生産性を高く維持するためには飽和脂肪酸が好ましく、さらにロボット用外装部品において、表面へのカルボン酸のブリードや金型に付着する有機物類の汚染物などの発生を抑制するという観点から、炭素数8から36である飽和脂肪酸から選ぶことが好ましい。例えば、ラウリン酸、トリデシル酸、ミリスチル酸、ペンタデシル酸、パルミチン酸、ヘプタデシル酸、ステアリン酸、ノナデカン酸、アラキン酸、ベヘン酸、リグノセリン酸、セロチン酸、ヘプタコン酸、モンタン酸、アラギン酸等を挙げることができる。
【0077】
特に、含まれる脂肪酸(C)が2種類以上の場合、炭素数12〜27の1価の脂肪酸(C1)と、炭素数28〜36の1価の脂肪酸(C2)とを含むことが好ましい。脂肪酸(C1)および(C2)を含む脂肪酸(C)を用いることにより、物性バランスを維持し、より耐久性などを高めることができるため、好ましい。これらの脂肪酸(C1)および(C2)は、それぞれ1種を単独でまたは2種以上を組み合わせて用いてもよい。
【0078】
脂肪酸(C1)としては、具体的には、ラウリン酸、トリデシル酸、ミリスチン酸、パルミチン酸、ペンタデシル酸、ステアリン酸、ノナデカン酸、アラキン酸、ベヘン酸、リグノセリン酸、セロチン酸、ヘプタコン酸等が挙げられる。
【0079】
また、脂肪酸(C2)としては、具体的には、モンタン酸、メリシン酸等が挙げられる。
【0080】
なお、脂肪酸(C1)および(C2)は、天然のものであっても合成されたものであってもよく、天然のものを用いた場合、本実施の形態に用いるオキシメチレン樹脂組成物が、その脂肪酸(C1)および(C2)と他の天然成分との混合物を含んでいてもよい。上述の1価の脂肪酸(C1)の中では、樹脂組成物中における充填材の凝集を抑えるという観点から、ステアリン酸およびパルミチン酸ならびにそれらの任意の割合の混合物が特に好ましく、脂肪酸(C2)の中では、モンタン酸が特に好ましい。
【0081】
本実施の形態に用いるオキシメチレン樹脂組成物において、ロボット用外装部品の生産性や物性バランスを維持し、耐久性などを高めるために、炭素数28〜36の1価の脂肪酸(C2)に対する炭素数12〜27の1価の脂肪酸(C1)の質量比[(C1)/(C2)]が0.8〜5.5であることが好ましく、1〜5であることがより好ましく、1.1〜4.5であることがさらに好ましい。質量比[(C1)/(C2)]を前記範囲内とすることにより、生産性を維持し、より耐久性などを高めることができるため、好ましい。
【0082】
4.脂肪酸のカルシウム塩(D)
本実施の形態に用いるオキシメチレン樹脂組成物は、ロボット用外装部品の生産性を維持し、耐久性などを高めるため、さらに脂肪酸のカルシウム塩(D)を含むことが好ましい。この脂肪酸のカルシウム塩(D)と脂肪酸(C)との質量比[脂肪酸(C)/脂肪酸のカルシウム塩(D)]は、3〜20であることが好ましく、4〜15であることがより好ましく、さらに好ましくは5〜13である。質量比[(C)/(D)]を前記範囲内とすることにより、生産性を維持し、より耐久性などを高めることができるため、好ましい。
【0083】
脂肪酸のカルシウム塩(D)を構成する脂肪酸は、樹脂組成物により良好な生産性を維持するという観点から、好ましくは上述した(C1)と同種の脂肪酸である。中でも、脂肪酸(C1)がパルミチン酸であり、脂肪酸のカルシウム塩(D)がパルミチン酸カルシウムである組み合わせ、脂肪酸(C1)がステアリン酸であり、脂肪酸のカルシウム塩(D)がステアリン酸カルシウムである組み合わせ、脂肪酸(C1)がベヘン酸であり、脂肪酸のカルシウム塩(D)がベヘン酸カルシウムである組み合わせが好ましく、脂肪酸(C1)が12−ヒドロキシステアリン酸であり、脂肪酸のカルシウム塩(D)がビス(12−ヒドロキシ)ステアリン酸カルシウムである。特には脂肪酸(C1)がステアリン酸であり、脂肪酸のカルシウム塩(D)がステアリン酸カルシウムである組み合わせが好ましい。
【0084】
5.その他の添加剤(E)
本実施の形態に用いるオキシメチレン樹脂組成物は、上記オキシメチレンコポリマー(A)に、添加剤として充填材(B)、脂肪酸(C)を含む。さらに脂肪酸のカルシウム塩(D)を含むことが好ましい。また、オキシメチレン樹脂組成物は、本実施の形態の目的を損なわない範囲で、従来公知のその他の添加剤を含んでもよい。例えば、酸化防止剤、熱安定剤、ホルムアルデヒドや蟻酸の捕捉剤、耐候(光)剤、滑剤、離型剤、結晶核剤、強化材、他の熱可塑性樹脂、柔軟性付与剤が挙げられる。
【0085】
特にロボット用外装部品の意匠性を高めるために着色剤を添加することができる。着色剤としては、有機顔料、無機顔料などが挙げられるが、特に限定されるものではなく、1種および2種以上の着色剤の組合せであってもよい。有機顔料としては、フタロシアニン系顔料、縮合アゾ系顔料、アゾレーキ系顔料、キナクリドン系顔料、ジオキサジン系顔料、イソインドリノン系顔料、縮合多環系顔料等が挙げられる。無機顔料としては、亜鉛華、二酸化チタン、弁柄、酸化クロム、鉄黒等の単純酸化物;カドミウムイエロー、カドミウムオレンジ、カドミウムレッド等の硫化物;黄鉛、亜鉛黄、クロムバーミリオン等のクロム酸塩;紺青等のフェロシアン化物;群青等の珪酸塩;カーボンブラック、金属粉等の無機系色剤が挙げられる。着色剤の添加量は、オキシメチレンコポリマー(A)100質量部に対して10質量部以下が好ましい。この範囲にすることで、ロボット用外装部品の物性バランスを維持し、耐久性などを高めることができる。
【0086】
6.オキシメチレン樹脂組成物の製造方法
オキシメチレン樹脂組成物は、本実施の形態のロボット用外装部品を構成する樹脂組成物であり、上述のように、オキシメチレンコポリマー(A)、充填材(B)、脂肪酸(C)、さらに好ましくは脂肪酸のカルシウム塩(D)やその他の添加剤(E)を含有する。以下では、上記成分(A)〜(E)を全て用いた場合のオキシメチレン樹脂組成物の製造方法を例示的に説明する。
【0087】
上記のオキシメチレンコポリマー(A)、充填材(B)、脂肪酸(C)、脂肪酸のカルシウム塩(D)およびその他の添加剤(E)の混合は、オキシメチレンコポリマー(A)の造粒時に(B)〜(E)を添加し、溶融混練することにより行ってもよい。また、(A)の造粒後、新たに、ヘンシェルミキサー、タンブラーやV字型ブレンダーを用いて(A)〜(E)を混合した後、ニーダー、ロールミル、単軸押出機、二軸押出機や多軸押出機を用いて溶融混錬することにより、オキシメチレン樹脂組成物を得ることもできる。造粒ペレットを用いる場合は、添着剤を用いて分散性を高めてもよい。かかる添着剤として、例えば、脂肪族炭化水素および芳香族炭化水素、並びにこれらの変性物およびこれらの混合物、並びにポリオールの脂肪酸エステルが挙げられる。またさらには、各成分を本実施の形態の好ましい比率でそれぞれ、または一部予め混合後、定量フィーダーを用いて押出機に投入し、造粒してもかまわない。
【0088】
また、オキシメチレンコポリマー(A)に対する(B)〜(E)の分散性を高めるために、混合するオキシメチレンコポリマー(A)のペレットの一部または全量を粉砕して予め混合した後、溶融混合してもよい。このときの加工温度は180〜230℃であることが好ましい。さらに、生産性を保持する観点から、不活性ガスによる置換や、一段および多段ベントで脱気することが好ましい。
【0089】
[3.ロボット用外装部品の製造方法]
本実施の形態のロボット用外装部品の製造方法としては、従来のオキシメチレン樹脂等に用いられる多様な公知の成形方法が挙げられる。
【0090】
かかる成形方法として、特に制限されないが、例えば、押出成形、射出成形、真空成形、ブロー成形、射出圧縮成形、加飾成形、多色成形、ガスアシスト射出成形、発砲射出成形、低圧成形、超薄肉射出成形(超高速射出成形)、金型内複合成形(インサート成形、アウトサート成形)等の成形方法が挙げられる。特に、生産性の面から押出成形、射出成形、射出圧縮成形、または異材を組み合わせる多色成形、金型内複合成形が好ましい。
【0091】
本実施の形態のロボット用外装部品は、複雑な形状における成形性や切削性・後加工性に優れるため、当該ロボット用外装部品に種々の機能を付加しても、優れた生産性を維持し、かつ耐久性などを一層優れたものとすることができる。また、ロボット用外装部品の表面状態は、平滑なものでも、各種シボ加工を施してもかまわない。
【0092】
[4.ロボット用外装部品の使用]
本実施の形態のロボット用外装部品は、通常の外装部品と異なりロボット固有の特殊な環境下で使用される。その使用環境や用途について、以下に説明する。
【0093】
1.使用環境
本実施の形態のロボット用外装部品は、ロボットが稼動部を有するため、該稼動部を保護するために添加される種々の油やグリース(ギア油、作動油、タービン油、防錆油、ポンプ油、リチウム系やモリブデン系やシリコン系グリースなど)などに接触しても、耐久性を有する必要がある。また外装部品として、繰り返し洗浄のため洗剤や溶剤(界面活性剤、金属石鹸、塩素系洗剤、研磨剤・錆落とし、アルコール類やケトン類などの有機薬品など)などと接触しても、ある程度の外観を保持し、意匠性を維持する必要がある。
【0094】
さらには、ロボットの作業目的に応じて、切削油、塗料、薬剤や食品などに接触しても、耐久性を有することが好ましい。また、特定のロボット用外装部品においては、消毒薬・殺菌剤(アルキル化剤やハロゲン化合物や過酸化物などの酸化剤、酸・アルカリ、アルコール類/エタノールやイソプロピルアルコール、ガス状のアルキル化剤や酸化剤/ホルムアルデヒドやオゾン、植物精油や香辛料など天然に存在する殺菌性物質など)などとの断続的な接触において、耐久性を有することが好ましい。また上記同様に外装部品として、それぞれの薬品などと接触しても、ある程度の外観を保持し、意匠性を維持する必要がある。
【0095】
本実施の形態のロボット用外装部品は、上述のような特殊な使用環境下での耐久性、意匠性のための外観保持性に優れるため、油、グリース、洗剤および溶剤からなる群より選択される少なくとも1種と接触する外装部品として使用することができる。
【0096】
本実施の形態のロボット用外装部品は、その耐久性の低下や外観の悪化によっては、ロボット本体から取り外して、別の外装用部品に取替えを行なってもよい。そのために、ボス、リブ、スナップフィット機構やクリップ機構などを備えてもかまわない。
【0097】
2.用途
本実施の形態のロボット用外装部品は、カバー、バスケットやホルダーなどの外装部品・容器類やこれらの一部の部位、バルブやエルボー、ノズルなどの配管・ジョイント類、搬送用のチェーンやコンベアなどに使用される。本実施の形態のロボット用外装部品におけるロボットとしては、特に限定されないが、例えば、OA機器、音楽機器、映像機器、情報通信機器、電気電子機器、自動車、工業機器、農業機器、医療用機器、医薬品加工機器、食品加工機器、住宅用機器および衛生用機器からなる群より選択される少なくとも1種の本体または該本体の部品を生産するためのロボットが挙げられる。
【実施例】
【0098】
以下の実施例により本実施の形態をさらに詳しく説明するが、本実施の形態は以下の実施例により何ら限定されるものではない。
【0099】
[オキシメチレン樹脂組成物(P)の調製]
実施例および比較例の樹脂組成物に用いた成分を以下に説明する。また、各樹脂組成物等を構成する各成分について下記表1〜3に示す。
【0100】
1.オキシメチレンコポリマー(A)
1.1.オキシメチレンコポリマー(A−1)の調製
熱媒を通すことができるジャッケット付きの2軸セルフクリーニングタイプの重合機(L/D=8)を80℃に調整した。該重合機に、トリオキサンを4kg/hrと、コモノマーとして1,3−ジオキソランと、連鎖移動剤としてメチラールとを供給して重合を行なった。コモノマーの供給量は、オキシメチレンコポリマー(A)中のオキシアルキレン成分の含有割合が、オキシメチレン成分に対して、0.6モル%となるように調整を行なった。また同様にメチラールの供給量は、オキシメチレンコポリマー(A)のメルトフローレート(ISO1133条件D、190℃)が3g/10分となるように調整を行なった。さらに重合触媒として三フッ化硼素ジ−n−ブチルエーテラートをトリオキサン1モルに対して1.5×10-5モルとなる量で、連続的に添加し重合を行ない、粗オキシメチレンコポリマーを得た。
【0101】
次に、重合機より排出された粗オキシメチレンコポリマーをトリエチルアミン0.1%水溶液中に投入し重合触媒の失活を行なった。重合触媒の失活した粗オキシメチレンコポリマーを遠心分離機でろ過した。その後、この粗オキシメチレンコポリマー100質量部に対して、第4級アンモニウム化合物として水酸化コリン蟻酸塩(トリエチル−2−ヒドロキシエチルアンモニウムフォルメート)を含有した水溶液1質量部を添加して、均一に混合した後120℃で乾燥した。水酸化コリン蟻酸塩の添加量は、上記式<1>で表される窒素量に換算して20質量ppmとした。当該添加量の調整は、添加する水酸化コリン蟻酸塩を含有した水溶液中の水酸化コリン蟻酸塩の濃度を調整することにより行った。
【0102】
前記乾燥後の粗オキシメチレンコポリマーをベント付き2軸スクリュー式押出機に供給した。押出機中の溶融している粗オキシメチレンコポリマー100質量部に対して、水を0.5質量部添加し、押出機設定温度200℃、押出機における滞留時間7分間の条件で、その不安定末端部分の分解除去処理を行なった。不安定末端部分の分解されたオキシメチレンコポリマーは、ベント真空度20Torrの条件下で脱揮され、さらにオキシメチレンコポリマー100質量部に対し、酸化防止剤としてトリエチレングリコール−ビス−[3−(3−t−ブチル−5−メチル−4−ヒドロキシフェニル)−プロピオネート]0.35質量部を添加し、溶融混練し造粒することによりオキシメチレンコポリマー(A−1)のペレットを得た。
【0103】
1.2.オキシメチレンコポリマー(A−2)の調製
オキシメチレンコポリマー(A)のメルトフローレート(ISO1133条件D、190℃)が12g/10分となるようにメチラールの供給量を調整した以外は、上記1.1.オキシメチレンコポリマー(A−1)の調製と同様にして、オキシメチレンコポリマー(A−2)のペレットを得た。
【0104】
1.3.オキシメチレンコポリマー(A−3)の調製
オキシメチレンコポリマー(A)のメルトフローレート(ISO1133条件D、190℃)が40g/10分となるようにメチラールの供給量を調整した以外は、上記1.1.オキシメチレンコポリマー(A−1)の調製と同様にして、オキシメチレンコポリマー(A−3)のペレットを得た。
【0105】
1.4.オキシメチレンコポリマー(A−4)の調製
オキシメチレンコポリマー(A)中のオキシアルキレン成分の含有割合が、オキシメチレン成分に対して、0.2モル%となるようにコモノマーの供給量を調整した以外は、上記1.2.オキシメチレンコポリマー(A−2)の調製と同様にして、オキシメチレンコポリマー(A−4)のペレットを得た。
【0106】
1.5.オキシメチレンコポリマー(A−5)の調製
オキシメチレンコポリマー(A)中のオキシアルキレン成分の含有割合が、オキシメチレン成分に対して、1.5モル%となるようにコモノマーの供給量を調整した以外は、上記1.2.オキシメチレンコポリマー(A−2)の調製と同様にして、オキシメチレンコポリマー(A−5)のペレットを得た。
【0107】
〈オキシアルキレン成分の含有割合の測定方法〉
上記コモノマーの供給量の調整により得られた各オキシメチレンコポリマーにおけるオキシメチレン成分a(モル数)に対するオキシアルキレン成分b(モル数)の割合(モル%)(以下「(b/a)×100」とも記す。)を下記表1〜3に示す。ここで(b/a)×100は、以下のようにして求めた。
【0108】
得られた各ポリオキシメチレンコポリマーを、溶媒であるヘキサフルオロイソプロパノール(HFIP)−d2(D化率97%、和光純薬98%assay)中に、24時間かけて溶解させることにより、ポリオキシメチレンコポリマーの1.5質量%溶液を調製した。
【0109】
上記のポリオキシメチレンコポリマーの1.5質量%溶液を検体として、JEOL−400核磁気共鳴分光計(1H:400MHz)を用い、55℃および積算回数500回の条件下、オキシメチレン成分aと、当該成分a以外のオキシアルキレン成分bとの帰属ピークを積分した。このようにして得られた積分値から、オキシメチレン成分a(モル数)に対するオキシアルキレン成分b(モル数)の割合(モル%)「(b/a)×100」を求めた。
【0110】
〈メルトフローレートの測定方法〉
上記連鎖移動剤の供給量の調整により得られた各オキシメチレンコポリマーのメルトフローレートを下記表1〜3に示す。ここでメルトフローレート(ISO1133条件D、190℃)は、メルトインデクサー(東洋精機(株)社製、F−W01)を用いて求めた。
【0111】
2.オキシメチレンホモポリマー(A’)の調製
攪拌羽根の付いた、連続式にモノマー等を供給できるタンクに、脱水したホルムアルデヒドガス100質量部、触媒としてジメチルジステアリルアンモニウムアセテート0.1質量部を投入した。次いで、該タンクに、分子量調節剤として無水酢酸を、重合後のオキシメチレンホモポリマーのメルトフローレートが12g/10分となるような量で連続的に供給しながら、58℃で重合を行い、粗ポリオキシメチレンホモポリマーを得た。
【0112】
得られた粗ポリオキシメチレンホモポリマーを、ヘキサンと無水酢酸との1対1混合溶媒に入れ、140℃で2時間、末端基を化学処理した。末端基を化学処理した粗ポリオキシメチレンホモポリマーを120℃、3時間、1mmHgの条件で真空乾燥した。次に、乾燥した粗オキシメチレンホモポリマー100質量部に対して、酸化防止剤としてトリエチレングリコール−ビス〔3−(3−t−ブチル−5−メチル−4−ヒドロキシフェニル)プロピオネート〕を0.35質量部添加し、ベント付2軸押出機で溶融混練することによりオキシメチレンホモポリマーのペレットを得た。得られたオキシメチレンホモポリマー(A’)について、上記同様のメルトフローレート(ISO1133条件D、190℃)の測定を行なったところ、12g/10分であった。
【0113】
3.充填材(B)
充填材(B)として、用いた充填材(B−1)〜(B−9)を以下に列挙する。市販品を原料として、下記に示す平均粒径の充填材を得た。該平均粒径は、以下のとおり求めた。測定対象となる充填材粒子のサンプリングを行い、サンプリングした粒子を走査型電子顕微鏡(SEM)により倍率1千倍から5万倍で撮影し、得られた画像において無作為に選んだ最低100個の充填材粒子の、それぞれの最大粒径を測定し、得られた各最大粒径の相加平均を平均粒径として求めた。
【0114】
(B−1):白石工業製炭酸カルシウム「Brilliant−1500」(平均粒径150nm、表面未処理、pH=9.7)
(B−2):日本タルク製含水珪酸マグネシム「MS」(平均粒径11μm、表面未処理)
(B−3):白石工業製炭酸カルシウム「白艶華PZ」(平均粒径80nm、表面未処理、pH=9.3)を分級し、平均粒径30nmの粒子を採取した。
【0115】
(B−4):白石工業製炭酸カルシウム「PC−700」(平均粒径1.2μm、表面未処理、pH=9.9)を分級し、平均粒径900nmの粒子を採取した。
【0116】
(B−5):巴工業社製珪酸カルシウム「NYAD1250」(平均粒径5μm、L/D=3、表面未処理)
(B−6):協和化学工業製ハイドロタルサイト「DHT−4C」(平均粒径0.5μm、表面未処理)
(B−7):白石工業製炭酸カルシウム「Brilliant−1500」(平均粒径150nm、表面未処理、pH=9.1)
(B−8):白石工業製炭酸カルシウム「Brilliant−1500」(平均粒径150nm、表面未処理、pH=10.2)
(B−9):白石工業製炭酸カルシウム「Vigot−15」(平均粒径150nm、表面脂肪酸処理)
4.脂肪酸(C)
脂肪酸(C)として、用いた炭素数12〜27の1価の脂肪酸(C1)と炭素数28〜36の1価の脂肪酸(C2)とを以下に列挙する。
【0117】
(C1−1):和光純薬工業製 ステアリン酸(融点64℃)
(C1−2):和光純薬工業製 ベヘン酸(融点82℃)
(C2−1):和光純薬工業製 モンタン酸(融点84℃)
(C2−2):和光純薬工業製 メリシン酸(融点94℃)
4.脂肪酸のカルシウム塩(D)
脂肪酸のカルシウム塩(D)として、用いた(D−1)と(D−2)とを以下に列挙する。
【0118】
(D−1):堺化学工業製 ステアリン酸カルシウム「SC−100」
(D−2):堺化学工業製 ビス(12−ヒドロキシステアリン酸)カルシウム「SC−120H」
[オキシメチレン樹脂組成物等のペレット(P)の製造]
〈ペレット(P1〜P28)の製造〉
オキシメチレン樹脂組成物のペレット(P1〜P28)を、2軸押出機(東芝機械(株)製、商品名「TEM−26SS押出機」、L/D=48、ベント付き)を用いて以下のとおり製造した。
【0119】
前記2軸押出機のホッパー下を冷却水により冷却し、210〜215℃に設定し、ダイヘッドを210℃に設定した。この温度条件で、表1および2に示すように、オキシメチレンコポリマー(A)、充填材(B)、脂肪酸(C)、必要に応じて脂肪酸のカルシウム塩(D)を、前記2軸押出機のトップより定量フィーダーを用いて供給した。スクリュー回転数150rpmの条件で前記各成分の混合物を溶融混練し、ベントより脱気し、ダイヘッドから溶融混練物を押し出し造粒し、オキシメチレン樹脂組成物のペレット(P1〜P28)を得た。なお、造粒中にオキシメチレン樹脂組成物の生産性を後述のとおり評価した。
【0120】
〈ペレット(P29〜P31)の製造〉
表3に示すように、上記調製したオキシメチレンコポリマー(A−1)〜(A−3)だけを2軸押出機に供給した((B)〜(D)成分を供給しなかった)以外は、上述のオキシメチレン樹脂組成物のペレット(P1〜P3)の製造と同様の方法でオキシメチレンコポリマー(A−1)〜(A−3)のペレット(P29〜P31)を製造した。
【0121】
〈ペレット(P32)の製造〉
表3に示すように、オキシメチレンコポリマー(A−1)に代えて、上記調製したオキシメチレンホモポリマー(A’)を用いた以外は、上述のオキシメチレン樹脂組成物のペレット(P2)の製造と同様の方法でオキシメチレン樹脂組成物のペレット(P32)を製造した。
【0122】
〈ペレット(P33)の製造〉
表3に示すように、脂肪酸(C)および脂肪酸のカルシウム塩(D)を供給しなかった以外は、上述のオキシメチレン樹脂組成物のペレット(P2)と同様の方法でオキシメチレン樹脂組成物のペレット(P33)を製造した。
【0123】
なお、後述するとおり、上記ペレット(P29〜P33)を造粒する際も、生産性や状態観察を行い、充填材を含まない上記ペレット(P30)の場合を評価の基準とした。
【0124】
【表1】
【0125】
【表2】
【0126】
【表3】
[実施例1〜28]
上記製造したオキシメチレン樹脂組成物のペレット(P1〜28)を下記条件で射出成形することにより、図1に示す形状の各成形片(ロボット用外装部品に相当)を作製した。作製した各成形片について、後述のとおり各評価を行った。評価結果を表4および表5に示す。
【0127】
射出成形機:(株)日本精鋼所製;J110AD−180H、
シリンダー温度:200℃、
射出圧力:80MPa、
射出時間:40秒、
冷却時間:20秒、
金型温度:85℃。
【0128】
[比較例1〜5]
上記製造したペレット(P29〜33)を実施例1と同様の条件で射出成形することにより、図1に示す形状の各成形片(ロボット用外装部品に相当)を作製した。作製した各成形片について、後述のとおり各評価を行った。評価結果を表4に示す。
【0129】
[評価項目]
1.生産性の評価
ロボット用外装部品の生産性の評価は、オキシメチレン樹脂組成物等のペレットの生産性および外装部品の代表として図1に示す成形片の成形性および品位により行った。
【0130】
(1)オキシメチレン樹脂組成物等の生産性評価
オキシメチレン樹脂組成物等の生産性評価は、2軸押出機のトルクを、充填材を含まないペレット(P30)を造粒した場合と同じになるように調整して造粒したときの、オキシメチレン樹脂組成物等の単位時間当たりの平均造粒量、ストランドの状態、並びにペレットの外観および臭気などにより、総合的に行った。具体的には、充填材を含まないペレット(P30)を造粒した場合を評価の基準として、以下のとおりオキシメチレン樹脂組成物等の生産性評価を行った。
【0131】
(生産性評価)
◎:平均造粒量の低下が5%未満でペレット(P30)の生産性と同等の場合、
○:平均造粒量の低下が5%以上15%未満の場合、
◇:平均造粒量の低下が15%以上25%未満の場合、
△:平均造粒量の低下が25%以上35%未満、またはペレットの着色・臭いなどが若干発生した場合、
×:平均造粒量の低下が35%以上、またはストランドギレもしくはストランド径が不安定になったりするなど明らかに造粒状態が悪化した場合。
【0132】
(2)ロボット用外装部品の品位評価
ロボット用外装部品の品位の評価には、実施例および比較例で作製した成形片を用いて行なった。
【0133】
なお、実施例および比較例における成形片の成形は100ショット実施し、その中で安定してきた40ショットから100ショットまでの計量時間や離型状況などの運転状態の観察と、80ショットから100ショットの成形片の品位(外観(光沢、平滑性、シルバーやフローマークなど)や色、それらの安定性など)の目視による観察とを行なった。
【0134】
具体的には、充填材を含まないペレット(P30)を造粒した場合を評価基準として、以下のとおりロボット用外装部品の品位評価を行った。
【0135】
(品位評価)
◎:外観がペレット(P30)よりも良好な場合、
○:外観がペレット(P30)と同等レベルの場合、
◇:若干外観の低下が確認された場合、
△:機能的には問題ないが着色やシルバーなどが部分的に確認された場合、
×:意匠面の中央にシルバーなどが確認されたり、運転状態や品位がショットにより安定しなかったりなど、ロボット用外装部品の使用に際し明らかに不良と判断された場合。
【0136】
2.物性バランスの評価
物性バランスの評価は、実施例および比較例で作製した成形片の図2に示す部分を万能試験機(島津製作所製、オートグラフAGS−X)で引張試験(試験方法としてはISO527に準拠、但し伸度はチャック間伸度とした)をn=5で実施し、得られた弾性率(TM)と伸度(TE)とをそれぞれ相加平均した値を用いて行なった。
【0137】
比較として用いる値は、比較例1〜3で作製した成形片の物性バランスであり、これらの弾性率と伸度との結果を図3に示す。
【0138】
これらの弾性率と伸度との結果より、比較例1〜3で作製した成形片の物性バランスの関係は下記数式<2>で表わすことができる。
【0139】
【数2】
実施例1〜28ならびに比較例4および5で作製した成形片の伸度(TE)を用いて、上記数式<2>から求めた弾性率(TM’)と、実際に引張試験により得られた弾性率(TM)とを比較することにより物性バランスの評価を行なった。
【0140】
具体的には、下記数式<3>の計算により得られたバランス評価値により下記基準で物性バランスの評価を行った。
【0141】
(基準)
×:バランス評価値が0%未満の場合((TM)が(TM’)より小さい場合)、すなわち充填材を含まないペレット(P29〜31)から作製した比較例1〜3の成形片の物性バランスより低下している場合、
△:バランス評価値が0%以上5%未満の場合、
◇:バランス評価値が5%以上10%未満の場合、
○:バランス評価値が10%以上15%未満の場合、
◎:バランス評価値が15%以上の場合。
【0142】
【数3】
3.通常の耐久性の評価
耐久性の評価には、実施例および比較例で作製した成形片を使用した。該成形片について、下記(1)または(2)のとおり、作動油または洗浄剤を作用させた後、上記2.物性バランスの評価と同様の引張試験を実施した。該引張試験を、n=5で行い、各試験片の引張伸度を相加平均により求めた。該引張伸度と、上記2.物性バランスの評価で求めた耐久性評価前の引張伸度との変化により、通常の耐久性の評価を行なった。また、当該耐久性評価前後において、成形片の意匠面の外観保持性の変化も観察した。
【0143】
(1)耐作動油性
耐作動油性を作動油の代表としてシェルテラスオイル32(昭和シェル石油製)に対する耐久性により評価した。具体的には、実施例および比較例で作製した成形片を用いて、同作動油に試験片を浸漬後密閉し、80℃で800時間経過後の試験片の引張伸度の低下の割合を求め、下記評価基準により評価を行なった。なお、充填材を含まないペレット(P30)から作製した比較例2の成形片の引張伸度の低下率は50%以上であった。
【0144】
(評価基準)
×:引張伸度の低下率が50%以上または外観(クラックの発生、光沢や色の変化など)が著しく変化した場合、
△:少し改善がみられ引張伸度の低下率が40%以上50%未満、または外観の変化が若干みられたが、使用において問題ない場合、
◇:意匠面に大きな外観の変化がなく、引張伸度の低下率が30%以上40%未満の場合、
○:外観変化がなく、引張伸度の低下率が20%以上30%未満の場合、
◎:外観変化がなく、引張伸度の低下率が20%未満と大きく改善が見られた場合。
【0145】
(2)耐洗剤性
耐洗剤性を洗剤の代表として復活洗浄剤/錆取用(カンペハピオ製)に対する耐久性により評価した。具体的には、実施例および比較例で作製した成形片を用いて、同洗浄剤に試験片を浸漬後密閉し、30℃で800時間経過後の試験片の引張伸度の低下の割合を求め、下記評価基準により評価を行なった。なお、充填材を含まないペレット(P30)から作製した比較例2の成形片の引張伸度の低下率は50%以上であった。
【0146】
(評価基準)
×:引張伸度の低下率が50%以上または外観(クラックの発生、光沢や色の変化など)が著しく変化した場合、
△:少し改善がみられ引張伸度の低下率が40%以上50%未満、または外観の変化が若干みられたが、使用において問題ない場合、
◇:意匠面に大きな外観の変化がなく、引張伸度の低下率が30%以上40%未満の場合、
○:外観変化がなく、引張伸度の低下率が20%以上30%未満の場合、
◎:外観変化がなく、引張伸度の低下率が20%未満と大きく改善が見られた場合。
【0147】
4.特殊環境に対する耐久性の評価
特殊環境に対する耐久性の評価には、実施例および比較例で作製した成形片を使用した。該成形片について、下記(1)または(2)のとおり、切削油や消毒剤を作用させた後、上記2.物性バランスの評価と同様の引張試験を実施した。該引張試験を、n=5で行い、各試験片の引張伸度を相加平均により求めた。該引張伸度と、上記2.物性バランスの評価で求めた耐久性評価前の引張伸度との変化により、特殊環境に対する耐久性の評価を行なった。また、当該耐久性評価前後において、成形片の意匠面の外観保持性の変化も観察した。
【0148】
(1)耐切削油性
耐切削油性を切削油の代表としてユシロンカットUB100(ユシロ化学工業製)に対する耐久性により評価した。具体的には、実施例および比較例で作製した成形片を用いて、同切削油に試験片を浸漬後密閉し、80℃で800時間経過後の試験片の引張伸度の低下の割合を求め、下記評価基準により評価を行なった。なお、充填材を含まないペレット(P30)から作製した比較例2の成形片の引張伸度の低下率は50%以上であった。
【0149】
(評価基準)
×:引張伸度の低下率が50%以上または外観(クラックの発生、光沢や色の変化など)が著しく変化した場合、
△:少し改善がみられ引張伸度の低下率が40%以上50%未満、または外観の変化が若干みられたが、使用において問題ない場合、
◇:意匠面に大きな外観の変化がなく、引張伸度の低下率が30%以上40%未満の場合、
○:外観変化がなく、引張伸度の低下率が20%以上30%未満の場合、
◎:外観変化がなく、引張伸度の低下率が20%未満と大きく改善が見られた場合。
【0150】
(2)耐消毒剤性
耐消毒剤性を消毒剤の代表としてオキシドール(日本薬局方製)に対する耐久性により評価した。具体的には、実施例および比較例で作製した成形片を用いて、同消毒剤に試験片を浸漬後密閉し、20℃で4000時間後の試験片の引張伸度の低下の割合を求め、下記評価基準により評価を行なった。
なお、充填材を含まないペレット(P30)から作製した比較例2の成形片の引張伸度の低下率は50%以上であった。
【0151】
(評価基準)
×:引張伸度の低下率が50%以上または外観(クラックの発生、光沢や色の変化など)が著しく変化した場合、
△:少し改善がみられ引張伸度の低下率が40%以上50%未満、または外観の変化が若干みられたが、使用において問題ない場合、
◇:意匠面に大きな外観の変化がなく、引張伸度の低下率が30%以上40%未満の場合、
○:外観変化がなく、引張伸度の低下率が20%以上30%未満の場合、
◎:外観変化がなく、引張伸度の低下率が20%未満と大きく改善が見られた場合。
【0152】
[実施例1〜11、比較例1〜5の評価結果]
実施例1〜11、比較例1〜5の評価結果を下記表4に示す。
【0153】
実施例1〜11、比較例1〜5の評価結果から、本実施の形態のロボット用外装部品は、生産性を維持でき優れた物性バランスを有するとともに、通常の耐久性や特殊環境に対する耐久性に優れることがわかった。
【0154】
実施例1〜5、比較例1〜3、4の結果から、特に、好ましいメルトフローレートおよびコモノマー量のオキシメチレンコポリマー(A)を含む樹脂組成物からなるロボット用外装部品は、より生産性を維持でき優れた物性バランスを有する傾向があることがわかった。
【0155】
実施例2、6〜8、比較例1〜3の結果から、特に、好ましい量の充填材(B)を含む樹脂組成物からなるロボット用外装部品は、より生産性を維持でき優れた耐久性を有する傾向があることがわかった。
【0156】
実施例2、9〜11、比較例1〜3、5の結果から、特に、好ましい量の脂肪酸(C)を含む樹脂組成物からなるロボット用外装部品は、より生産性を維持でき優れた耐久性を有する傾向があることがわかった。
【0157】
【表4】
[実施例2、12〜28、比較例1〜3の評価結果]
実施例12〜28の評価結果を下記表5に示す。
【0158】
実施例12〜28の評価結果から、本実施の形態のロボット用外装部品は、生産性を維持でき優れた物性バランスを有するとともに、通常の耐久性や特殊環境に対する耐久性に優れることがわかった。
【0159】
実施例2、12、13、比較例1〜3の結果から、特に、好ましい粒径の無機酸塩系充填材(B)を含む樹脂組成物からなるロボット用外装部品は、より生産性を維持でき優れた耐久性を有する傾向があることがわかった。
【0160】
実施例2、14〜16、比較例1〜3の結果から、特に、炭酸塩系および珪酸塩系の無機酸塩系充填材を含む樹脂組成物からなるロボット用外装部品は、より生産性を維持でき優れた物性バランスおよび耐久性を有する傾向があることがわかった。
【0161】
実施例2、17〜19、比較例1〜3の結果から、特に、炭酸カルシウムを含み、好ましいpHであり、表面処理がなされていない充填材(B)を含む樹脂組成物からなるロボット用外装部品は、より優れた物性バランスおよび耐久性を有する傾向があることがわかった。
【0162】
実施例2、20〜25、比較例1〜3の結果から、特に、脂肪酸(C)として炭素数12〜27の1価の脂肪酸(C1)と、炭素数28〜36の1価の脂肪酸(C2)とを、好ましい比率で含む樹脂組成物からなるロボット用外装部品は、より優れた物性バランスおよび耐久性を有する傾向があることがわかった。
【0163】
実施例2、26〜28、比較例1〜3の結果から、特に、好ましい量の脂肪酸のカルシウム塩(D)を含む樹脂組成物からなるロボット用外装部品は、より生産性を維持でき優れた耐久性を有する傾向があることがわかった。
【0164】
【表5】
【産業上の利用可能性】
【0165】
本発明は、特定のオキシメチレン樹脂組成物を含有するロボット用外装部品に関して、その生産性および物性バランスを従来技術に比して損なうことなく、従来技術よりも一層優れた耐久性などを有するロボット用外装部品を提供することができるという点において、産業上の利用可能性を有する。
【技術分野】
【0001】
本発明は、ロボット用外装部品に関する。
【背景技術】
【0002】
オキシメチレン樹脂は、バランスのとれた機械物性と成形加工性とを有するため、機械部品、電機・電子部品および自動車部品のような広範囲の用途に用いられている。しかし、工業部品や自動車部品などで継続的に紫外線や風雨の影響などを受ける用途においては、耐久性の低下や外観の悪化により、この使用を制限されることがある。一方、近年ロボット分野においては、制御技術の革新や市場の拡大、コストダウンの要求に伴い、ロボットを構成する材料について、樹脂による軽量化の検討が進んできている。
【0003】
ロボット分野の外装部品において、これまでオキシメチレン樹脂を使用したロボットに関する部品としては、例えば、樹脂製のホルダ(例えば、特許文献1参照)や繊維強化樹脂(FRP)製のロボットハンド(例えば、特許文献2参照)などが提案されている。
【0004】
また、オキシメチレン樹脂の外観の向上については、例えば、特定の強化用充填材と特定のアルカリ金属とを含むポリアセタール樹脂組成物(例えば、特許文献3参照)、シラン粘土複合体を含有するポリアセタール樹脂組成物(例えば、特許文献4参照)、ポリエチレンや立体障害性フェノールなどを含有してなり、かつメルトインデックスが1.0〜30.0g/10分である押出し成形用ポリアセタール樹脂組成物(例えば、特許文献5参照)などが提案されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2001−179142号公報
【特許文献2】特開2006−289591号公報
【特許文献3】特開平7−179720号公報
【特許文献4】特開2000−290467号公報
【特許文献5】特開2004−149670号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上記特許文献1〜5に開示された技術では、ロボット用外装部品に必要な剛性と靭性とのバランス(以下、「物性バランス」とも記載する)、特殊な使用環境下での耐久性、意匠性のための外観保持性などが充分とはいえない。
【0007】
そこで本発明は、ロボット用外装部品の生産性と物性バランスとを従来技術に比して損なうことなく、特殊な使用環境下での耐久性と意匠性のための外観保持性(以下、「耐久性など」とも記載する)とに優れたロボット用外装部品を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明者らは、上記課題を解決するために鋭意検討を重ねた。その結果、特定のオキシメチレン樹脂組成物を含有するロボット用外装部品が、特殊な使用環境下での耐久性などにおいて従来技術よりも優れることを見出し、本発明を完成させるに至った。
【0009】
すなわち、本発明は、下記のとおりである。
【0010】
[1]
オキシメチレンコポリマー(A)と充填材(B)と脂肪酸(C)とを含むオキシメチレン樹脂組成物を含有するロボット用外装部品。
【0011】
[2]
該オキシメチレンコポリマー(A)が、オキシメチレン成分と、該オキシメチレン成分以外のオキシアルキレン成分とを含み、
該オキシアルキレン成分の含有割合が、該オキシメチレン成分に対して、0.3〜1.3モル%である、[1]記載のロボット用外装部品。
【0012】
[3]
該充填材(B)の含有量が12〜35質量%であるオキシメチレン樹脂組成物を含有する、[1]または[2]記載のロボット用外装部品。
【0013】
[4]
該充填材(B)が、全充填材の質量に対する60%以上が平均粒径0.04〜0.8μmの無機酸塩系充填材である、[1]〜[3]のいずれか記載のロボット用外装部品。
【0014】
[5]
該充填材(B)が、炭酸塩系充填材および珪酸塩系充填材を含む、[1]〜[4]のいずれか記載のロボット用外装部品。
【0015】
[6]
該充填材(B)が、JIS K5101試験法によるpHが9.2以上10.0以下であり、かつ表面処理がなされていない炭酸カルシウムを含む、[1]〜[5]のいずれか記載のロボット用外装部品。
【0016】
[7]
該脂肪酸(C)と該充填材(B)との質量比[(C)/(B)]が0.027〜0.06である、[1]〜[6]のいずれか記載のロボット用外装部品。
【0017】
[8]
該脂肪酸(C)が、炭素数12〜27の1価の脂肪酸(C1)と、炭素数28〜36の1価の脂肪酸(C2)とを含む、[1]〜[7]のいずれか記載のロボット用外装部品。
【0018】
[9]
該脂肪酸(C1)と該脂肪酸(C2)との質量比[(C1)/(C2)]が1〜5である、[8]記載のロボット用外装部品。
【0019】
[10]
該オキシメチレン樹脂組成物が、さらに脂肪酸のカルシウム塩(D)を含む、[1]〜[9]のいずれか記載のロボット用外装部品。
【0020】
[11]
該脂肪酸(C)と該脂肪酸のカルシウム塩(D)との質量比[(C)/(D)]が4〜15である、[10]記載のロボット用外装部品。
【0021】
[12]
油、グリース、洗剤および溶剤からなる群より選択される少なくとも1種と接触する外装部品として使用する、[1]〜[11]のいずれか記載のロボット用外装部品。
【0022】
[13]
該ロボットが、OA機器、音楽機器、映像機器、情報通信機器、電気電子機器、自動車、工業機器、農業機器、医療用機器、医薬品加工機器、食品加工機器、住宅用機器および衛生用機器からなる群より選択される少なくとも1種の本体または該本体の部品を生産するためのロボットである、[1]〜[12]のいずれか記載のロボット用外装部品。
【発明の効果】
【0023】
本発明によれば、ロボット用外装部品の生産性と物性バランスとを従来技術に比して損なうことなく、従来技術よりも耐久性などに優れるロボット用外装部品を提供することができる。
【図面の簡単な説明】
【0024】
【図1】実施例および比較例で作製した成形片の形状を示す図である。
【図2】実施例および比較例で作製した成形片の物性バランスの評価を行った部分を示す図である。
【図3】比較例1〜3で作製した成形片の引張弾性率と引張伸度との関係および優れた物性バランスの領域を示す図である。
【発明を実施するための形態】
【0025】
以下、本発明を実施するための形態(以下、「本実施の形態」という。)について詳細に説明する。なお、本発明は、以下の実施の形態に限定されるものではなく、その要旨の範囲内で種々変形して実施することができる。
【0026】
以下では、ロボット用外装部品、当該ロボット用外装部品を構成する樹脂組成物、当該ロボット用外装部品の製造方法、当該ロボット用外装部品の使用方法の順に説明する。
【0027】
[1.ロボット用外装部品]
本実施の形態のロボット用外装部品とは、ロボットの外側に装備されて使用される部品、および/またはロボットの人から見えるところに装備される部品のことをいう。
【0028】
当該ロボットとは、「ある程度自律的に連続した自動作業を行う機械」および/または「人に近い形および機能を持つ機械」である。例えば、自動販売機、自動券売機、自動改札機や自動選別機などの自動機であったり、産業用ロボット、家事手伝いロボット、医療用または介護用ロボット、案内用または災害救助用ロボット、愛玩用または戦闘用ロボットなどである。また広義の意味では、人間の動作(作用のための力や移動のための速度)を補助するパワードスーツやロボットスーツ、ロボットカーなどを含むものである。
【0029】
[2.ロボット用外装部品を構成する樹脂組成物]
本実施の形態のロボット用外装部品を構成する樹脂組成物について、以下に説明する。当該ロボット用外装部品は、特定のオキシメチレン樹脂組成物を含有する。また、当該ロボット用外装部品は、例えば、特定のオキシメチレン樹脂組成物を成形することにより得られる。かかるオキシメチレン樹脂組成物は、下記のオキシメチレンコポリマー(A)、充填材(B)および脂肪酸(C)を含む。
【0030】
1.オキシメチレンコポリマー(A)
オキシメチレンコポリマー(A)は、例えば、下記の工程(1)および(2)により得ることができる。
【0031】
(1)重合工程
オキシメチレンコポリマー(A)とは、オキシメチレン基を主鎖に有し、分子中に炭素数2以上のオキシアルキレンユニットを有する重合体を表す。本実施の形態においては、ロボット用外装部品の生産性や物性バランスを維持し耐久性などを向上させるため、オキシメチレンホモポリマーではなく、オキシメチレンコポリマーを用いる。
【0032】
オキシメチレンコポリマー(A)を得る際の重合の形態は、本実施の形態で説明する部分以外は、公知の重合法(例えば、US−A−3027352、US−A−3803094、DE−C−1161421、DE−C−1495228、DE−C−1720358、DE−C−3018898、特開昭58−98322号公報、および特開平7-70267号公報に記載)を用いて実施することができる。かかる重合工程により、オキシメチレンコポリマー(A)の粗ポリマーが得られる。
【0033】
以下、オキシメチレンコポリマー(A)を得る際の本重合工程において用いられるモノマー等の材料を詳細に説明する。
【0034】
(モノマー)
主モノマーは、ホルムアルデヒドまたはその3量体であるトリオキサン若しくは4量体であるテトラオキサン等の環状オリゴマーを用いることが好ましい。ここで、本明細書における「主モノマー」とは、全モノマー量に対して50質量%以上含有されているモノマー成分をいう。
【0035】
コモノマーは、分子中に炭素数2以上のオキシアルキレンユニットを有する環状エーテル化合物を用いることが好ましい。かかる環状エーテル化合物として、好ましくは、エチレンオキシド、プロピレンオキシド、1,3−ジオキソラン、1,3−プロパンジオールホルマール、1,4−ブタンジオールホルマール、1,5−ペンタンジオールホルマール、1,6−ヘキサンジオールホルマール、ジエチレングリコールホルマール、1,3,5−トリオキセパン、1,3,6−トリオキオカン、および、分子に分岐もしくは架橋構造を構成しうるモノ−もしくはジ−グリシジル化合物からなる群より選ばれる1種の化合物または2種以上の混合物が挙げられる。
【0036】
オキシメチレンコポリマー(A)の主モノマーおよびコモノマーにおいて、水、メタノールおよび蟻酸といった重合反応中の重合停止作用および連鎖移動作用を有する不純物を極力含まないものを用いることが好ましい。これらの不純物を極力含まない主モノマーおよびコモノマーを用いることにより、予期せぬ連鎖移動反応を回避でき、これにより所望の分子量を有するポリマーが得られる。特に、ポリマー末端基に水酸基を誘導する不純物の含有量は、全モノマー量に対して、好ましくは30質量ppm以下、より好ましくは10質量ppm以下、さらに好ましくは3質量ppm以下である。所望の低不純物の主モノマーおよびコモノマーを得るための方法としては、公知の方法(例えば、主モノマーについては特開平3−123777号公報や特開平7−33761号公報、コモノマーについては特開昭49−62469号公報や特開平5−271217号公報に記載)を用いることができる。
【0037】
(連鎖移動剤)
オキシメチレンコポリマー(A)を得る際の重合において連鎖移動剤を用いてもよい。該連鎖移動剤としては、公知の成分、例えば、アルキル基がメチル、エチル、プロピル、イソプロピルおよびブチル等の低級脂肪族アルキル基であるホルムアルデヒドのジアルキルアセタールおよびそのオリゴマー、ならびにメタノール、エタノール、プロパノール、イソプロパノールおよびブタノール等の低級脂肪族アルコールを用いることが好ましい。長鎖分岐オキシメチレンコポリマー(A)を得るために、ポリエーテルポリオール、およびポリエーテルポリオールのアルキレンオキサイド付加物を用いてもよい。
【0038】
また、オキシメチレンコポリマー(A)のブロックコポリマーを得るために、ヒドロキシル基、カルボキシル基、アミノ基、エステル基およびアルコキシ基からなる群より選択される1種以上の基を有する重合体を連鎖移動させてもよい。さらに上記連鎖移動剤を2種以上使用してもよい。何れの場合にしても、できるだけ不安定末端数の少ないものが好ましい。
【0039】
(重合触媒)
オキシメチレンコポリマー(A)を得る際の重合触媒としては、ルイス酸、プロトン酸、およびプロトン酸のエステルまたは無水物等の、カチオン活性触媒が好ましい。
【0040】
ルイス酸としては、特に限定されないが、例えば、ホウ酸、スズ、チタン、リン、ヒ素およびアンチモンのハロゲン化物が挙げられる。これらの具体例として、特に限定されないが、三フッ化ホウ素、四塩化スズ、四塩化チタン、五フッ化リン、五塩化リンおよび五フッ化アンチモン、並びにそれらの錯化合物もしくは塩が挙げられる。
【0041】
また、プロトン酸、そのエステルまたは無水物の具体例としては、特に限定されないが、パークロル酸、トリフルオロメタンスルホン酸、パークロル酸−3級ブチルエステル、アセチルパークロラート、およびトリメチルオキソニウムヘキサフルオロホスフェートが挙げられる。これらの中でも、三フッ化ホウ素;三フッ化ホウ素水和物;酸素原子または硫黄原子を含む有機化合物と三フッ化ホウ素との配位錯化合物が好ましく、具体的には、三フッ化ホウ素ジエチルエーテル、三フッ化ホウ素ジ−n−ブチルエーテルを好適に挙げることができる。
【0042】
これらの重合触媒の使用量は、例えばモノマーとして、トリオキサンと環状エーテルおよび/または環状ホルマールとを用いる場合、モノマーの合計量1モルに対して、1×10-6モル〜1×10-3モルが好ましく、5×10-6モル〜1×10-4モルがより好ましい。重合触媒の使用量が上記範囲内であると、重合時の反応安定性や得られるロボット用外装部品の生産性を維持し易くなる。
【0043】
重合触媒の失活は、触媒中和失活剤を含む水溶液または有機溶剤溶液中に重合物を投入し、スラリー状態で一般的には数分〜数時間攪拌することにより行うことができる。かかる触媒中和失活剤の具体例として、特に限定されないが、アンモニア、トリエチルアミンおよびトリ−n−ブチルアミン等のアミン類、ならびにアルカリ金属およびアルカリ土類金属の、水酸化物、無機酸塩および有機酸塩からなる群より選択される1種以上が挙げられる。
【0044】
また、アンモニアおよびトリエチルアミン等の蒸気とオキシメチレンコポリマー(A)とを接触させて重合触媒を失活させる方法や、ヒンダードアミン類、トリフェニルホスフィンおよび水酸化カルシウムのうち少なくとも1種と混合機で接触させることにより触媒を失活させる方法も用いることができる。
【0045】
(2)末端安定化および造粒工程
末端安定化させたオキシメチレンコポリマー(A)は、上記工程により得られた粗ポリマーに含まれる不安定末端部分を分解除去することによって得られる。この不安定末端部分の分解除去方法としては、特に限定されないが、例えば、ベント付き単軸スクリュー式押出機やベント付き2軸スクリュー式押出機等を用いて、公知の塩基性物質である分解除去剤の存在下、粗ポリマーを溶融して不安定末端部分を分解除去することができる。末端安定化における溶融混練を行う場合には、品質や作業環境の保持のために、不活性ガスによる置換、ならびに一段および多段ベントによる脱気をすることが好ましい。
【0046】
溶融混練の温度は、オキシメチレンコポリマー(A)の融点以上260℃以下で行うことが好ましい。さらに、通常のオキシメチレン樹脂に添加することの可能な公知の安定剤を加えながら溶融混合し、造粒を行うことが好ましい。
【0047】
(不安定末端部分の分解除去剤)
不安定末端部分の分解除去剤として、特に限定されないが、例えばアンモニア、トリエチルアミンおよびトリブチルアミン等の脂肪族アミン、ならびに水酸化カルシウム等のアルカリ金属またはアルカリ土類金属の、水酸化物、無機弱酸塩および有機弱酸塩等の、公知の塩基性物質が挙げられる。
【0048】
上記分解除去剤の中でも、好ましくは、下記一般式(1)で表される少なくとも一種の第4級アンモニウム化合物である。そして、かかる第4級アンモニウム化合物を用いて、熱的に不安定な末端を処理する方法が好適に利用できる。なぜなら、上記方法で安定化させたオキシメチレンコポリマー(A)中には、殆ど不安定な末端部が残っていないためである。
【0049】
【化1】
(式中、R1、R2、R3およびR4は、各々独立して、炭素数1〜30の非置換アルキル基または置換アルキル基;炭素数6〜20の非置換アリール基または置換アリール基;炭素数1〜30の非置換アルキル基または置換アルキル基が少なくとも1個の炭素数6〜20のアリール基で置換されたアラルキル基または置換アラルキル基;炭素数6〜20のアリール基が少なくとも1個の炭素数1〜30の非置換アルキル基または置換アルキル基で置換されたアルキルアリール基または置換アルキルアリール基を表す。上記の非置換アルキル基または置換アルキル基は直鎖状、分岐状、または環状である。また上記の置換アルキル基、置換アリール基、置換アラルキル基、置換アルキルアリール基は、非置換アルキル基、アリール基、アラルキル基、およびアルキルアリール基の水素原子がハロゲンで置換されたものでもよい。nは1〜3の整数を表す。Xは水酸基、または炭素数1〜20のカルボン酸、水素酸、オキソ酸無機チオ酸もしくは炭素数1〜20の有機チオ酸の酸残基を表す。)
上記第4級アンモニウム塩の化合物の具体例として、特に限定されないが、テトラメチルアンモニウム、テトラエチルアンモニウム、テトラプロピルアンモニウム、テトラ−n−ブチルアンモニウム、セチルトリメチルアンモニウム、テトラデシルトリメチルアンモニウム、1,6−ヘキサメチレンビス(トリメチルアンモニウム)、デカメチレン−ビス−(トリメチルアンモニウム)、トリメチル−3−クロロ−2−ヒドロキシプロピルアンモニウム、トリメチル(2−ヒドロキシエチル)アンモニウム、トリエチル(2−ヒドロキシエチル)アンモニウム、トリプロピル(2−ヒドロキシエチル)アンモニウム、トリ−n−ブチル(2−ヒドロキシエチル)アンモニウム、トリメチルベンジルアンモニウム、トリエチルベンジルアンモニウム、トリプロピルベンジルアンモニウム、トリ−n−ブチルベンジルアンモニウム、トリメチルフェニルアンモニウム、トリエチルフェニルアンモニウム、トリメチル−2−オキシエチルアンモニウム、モノメチルトリヒドロキシエチルアンモニウム、モノエチルトリヒドロキシエチルアンモニウム、オクダデシルトリ(2−ヒドロキシエチル)アンモニウム、テトラキス(ヒドロキシエチル)アンモニウム等の水酸化物が挙げられる。
【0050】
また、上記具体例として、特に限定されないが、アジ化水素などのハロゲン化以外の水素酸塩;硫酸、硝酸、燐酸、炭酸、ホウ酸、塩素酸、よう素酸、珪酸、過塩素酸、亜塩素酸、次亜塩素酸、クロロ硫酸、アミド硫酸、二硫酸、トリポリ燐酸などのオキソ酸塩;チオ硫酸などのチオ酸塩;蟻酸、酢酸、プロピオン酸、ブタン酸、イソ酪酸、ペンタン酸、カプロン酸、カプリル酸、カプリン酸、安息香酸、シュウ酸などのカルボン酸塩も挙げられる。
【0051】
これらの中でも、水酸化物(OH-)、硫酸(HSO4-、SO42-)、炭酸(HCO3-、CO32-)、ホウ酸(B(OH)4-)、およびカルボン酸の塩が好ましい。かかるカルボン酸の中でも、蟻酸、酢酸およびプロピオン酸がより好ましい。
【0052】
これらの第4級アンモニウム化合物は、1種単独で用いてもよいし、2種以上を組み合わせて用いてもよい。
【0053】
第4級アンモニウム化合物の添加量は、粗ポリマーに対して、下記数式<1>で表される第4級アンモニウム化合物由来の窒素の量に換算して、0.05〜50質量ppmが好ましい。
【0054】
【数1】
(式中、Pは第4級アンモニウム化合物の粗ポリマーに対する濃度(質量ppm)を表し、「14」は窒素の原子量であり、Qは第4級アンモニウム化合物の分子量を表す。)
第4級アンモニウム化合物は、粗ポリマーを溶融する前に予め添加してもよいし、溶融させた粗ポリマーに添加してもよい。
【0055】
本実施の形態において、公知の分解除去剤であるアンモニア、トリエチルアミンおよびホウ酸化合物と第4級アンモニウム化合物とを併用してもよい。
【0056】
(オキシメチレンコポリマー(A)の組成)
オキシメチレンコポリマー(A)は、オキシメチレン成分と、該オキシメチレン成分以外のオキシアルキレン成分(コモノマーユニット)とを含むことが好ましい。
【0057】
オキシメチレンコポリマー(A)中のオキシアルキレン成分(コモノマーユニット)の含有割合が、オキシメチレン成分(1モル)に対して、0.15〜1.33モル%であることが好ましく、0.3〜1.3モル%であることがより好ましく、さらに好ましくは0.4〜1.2モル%である。上記工程により得られたオキシメチレンコポリマー(A)中では、オキシメチレン成分aに対し、コモノマー成分として、オキシメチレン成分a以外のオキシアルキレン成分bが挿入されている。この成分a(1モル)に対して挿入された成分b(モル数)の割合(モル%)「(b/a)×100」をオキシアルキレン成分(コモノマーユニット)の含有割合という。
【0058】
挿入割合(b/a)×100を上記範囲内にすることで、ロボット用外装部品の生産性や物性バランスを維持し、耐久性などを向上することができる。
【0059】
挿入割合(b/a)×100の定量については、例えば、1H−NMR法を用いる。その手順としては、得られたオキシメチレンコポリマーをヘキサフルオロイソプロパノール(HFIP)により濃度1.5質量%となるように24時間かけて溶解させる。そして、この溶解液を用いて1H−NMR解析を行い、オキシメチレン成分aとオキシメチレン成分a以外のオキシアルキレン成分bとの帰属ピ−クの積分値の比率より挿入割合(b/a)×100を求める。
【0060】
また、オキシメチレンコポリマー(A)のメルトフローレート(ISO1133条件D、190℃)は、2〜45g/10分が好ましく、5〜30g/10分がより好ましく、さらに好ましくは7〜25g/10分である。このため、連鎖移動剤をホルムアルデヒド1モル当たりに換算して0.02〜0.10モル%で重合することにより、上記メルトフローレート(MFR)の調整を行うことができる。オキシメチレンコポリマー(A)のMFRを上記範囲内とすることにより、ロボット用外装部品の生産性や物性バランスを維持し、耐久性などを向上することができる。
【0061】
2.充填材(B)
本実施の形態に用いるオキシメチレン樹脂組成物は、ロボット用外装部品が優れた生産性と物性バランスとを維持し、耐久性などを高めるため、充填材(B)を含む。
【0062】
充填材(B)の含有量は、オキシメチレン樹脂組成物に対し6〜45質量%であることが好ましく、12〜35質量%であることがより好ましく、さらに好ましくは15〜30質量%である。充填材(B)の含有量を前記範囲内とすることにより、より優れた生産性を維持し、耐久性などを高めることができるため、好ましい。
【0063】
この充填材(B)としては、ロボット用外装部品の安定性を維持するという観点から、従来のオキシメチレン樹脂に添加可能な充填材の中から選択することが好ましい。
【0064】
さらにロボット用外装部品の生産性と物性バランスとを維持し、耐久性などを高めるために、充填材(B)としては、無機系充填材や有機系充填材、またはその両方の中から2種類以上を組み合わせて含むことが好ましい。
【0065】
無機系充填材の具体例としては、金属粉(アルミニウム、ステンレス、ニッケル、銀など)、酸化物(酸化ケイ素、酸化鉄、アルミナ、酸化チタン、酸化亜鉛など)、水酸化物(水酸化アルミニウム、水酸化マグネシウム、水酸化カルシウムなど)、珪酸塩(タルク、マイカ、珪酸カルシウム、クレイ、ベントナイトなど)、炭酸塩(炭酸カルシウム、炭酸マグネシウム、ハイドロタルサイトなど)、カーボン系物質(カーボンブラック、黒鉛、カーボンファイバーなど)、硫酸塩、窒化ホウ素、窒化珪素などが挙げられる。
【0066】
有機系充填材の具体例としては、天然物系(リンター、木材、籾殻、絹、皮革など)や合成系(アラミド、テフロン(登録商標)、ビスコースなど)が挙げられる。
【0067】
これらの中でも、無機酸塩系充填材が好ましく、珪酸塩系充填材および炭酸塩系充填材からなる群より選ばれることがより好ましい。充填材(B)としては、炭酸塩系充填材および珪酸塩系充填材を含むことがさらに好ましい。珪酸塩系充填材としては、タルクや珪酸カルシウムが好ましく、炭酸塩系充填材としては、炭酸カルシウムやハイドロタルサイトが好ましい。さらに好ましくは、炭酸カルシウムを含むことが好ましい。入手のし易さや経済的な観点から、このような充填材(B)を用いることが、好ましい。
【0068】
炭酸カルシウムを用いる場合は、軽質炭酸カルシウムであることが好ましい。本実施の形態で用いられる炭酸カルシウム(例えば、軽質炭酸カルシウム)は、JIS K5101試験法によるpHは、好ましくは9.2以上10.0以下であり、より好ましくは9.4以上9.7以下であり、かつ表面処理がなされていないことが好ましい。このような充填材(B)を用いることにより、ロボット用外装部品の生産性や物性バランスを維持し、耐久性などを向上させることができる。軽質炭酸カルシウムの粒子の形状は特に限定されるものではなく、具体的には、球形、立方形、紡鍾形、薄片形、不定形等が挙げられる。これらのうち、ロボット用外装部品の異方性低減、機械的強度向上の観点から、立方形のものが好ましく、粒子の平均長径(L)と平均短径(D)との比であるアスペクト比(L/D)が3以下であるものがより好ましい。また軽質炭酸カルシウムの結晶形態としては、一般的に知られているカルサイト型、アラゴナイト型、パテライト型のいずれであってもよく、これらのうちオキシメチレン樹脂との界面密着性、樹脂組成物の機械的物性のバランス等の観点から、カルサイト型のものが好ましい。軽質炭酸カルシウムは、人工的に合成される軽質炭酸カルシウム(コロイド状炭酸カルシウム、沈降炭酸カルシウム、活性炭酸カルシウムと呼ばれることもある。)が好ましい。これらの中でも、炭酸カルシウム粒子の形状と径とを精密に制御できるという観点から、スラリー状の水酸化カルシウムに二酸化炭素を反応させて製造された軽質炭酸カルシウムが特に好ましい。軽質炭酸カルシウムは、1種を単独で用いてもよいし、2種以上を併用してもよい。さらに、軽質炭酸カルシウムの水銀ポロシメーターを用いた水銀圧入法による最多確率空隙半径は0.12m以上0.16m以下であることが好ましい。当該最多確率空隙半径が0.12m以上であることにより、樹脂組成物中に炭酸カルシウムの凝集体が生成し難く良分散体が得られる傾向にあり、0.16m以下であることにより、樹脂組成物の生産性が高く維持できる傾向にある。
【0069】
ロボット用外装部品の優れた生産性と物性バランスとを維持し、耐久性などを高めるために、充填材(B)は、平均粒径が0.01〜1.0μmの無機酸塩系充填材を含むことが好ましく、0.04〜0.8μmの無機酸塩系充填材を含むことがより好ましく、0.08〜0.4μmの無機酸塩系充填材を含むことがさらに好ましい。このような平均粒径の無機酸塩系充填材の含有量は、全充填材(B)の質量に対して60質量%以上であることが好ましく、70質量%以上であることがより好ましい。このような平均粒径の無機酸塩系充填材の含有量を前記範囲にすることにより、物性バランスを維持し、より耐久性などを高めることをできるため、好ましい。
【0070】
本実施の形態に用いる充填材(B)は、表面処理がされていてもよい。「表面処理」とは、充填材の製造工程や製造後の製品において、粒子の凝集を防止する目的で、公知の表面処理剤、付着剤又は錯化剤、及び凝集防止剤の少なくとも1種が添加され、その結果、該物質によって充填材表面が被覆されていることをいう。ここで、表面処理剤、付着剤又は錯化剤、及び凝集防止剤としては、例えば、アニオン系界面活性剤、カチオン系界面活性剤、両性界面活性剤、非イオン性界面活性剤が挙げられる。また、アミノシラン、エポキシシラン等のシラン系カップリング剤、チタネート系カップリング剤、脂肪酸(飽和脂肪酸及び不飽和脂肪酸)、脂肪族カルボン酸、樹脂酸及び金属セッケンが例示される。本実施の形態において、ロボット用外装部品の生産性を維持し、耐久性などを高めるために、充填材(B)の表面処理は極力少ない方が好ましい。
【0071】
充填材(B)の形状は、粉末状、鱗片状、板状、針状、球状、繊維状、テトラポッド状などの中から選択することが好ましく、特に物性バランスを維持し、効率的に耐久性などを高めるためには、粉末状、鱗片状、板状が好ましい。充填材(B)において、粒子の平均長径(L)と粒子の平均短径(D)との比である平均アスペクト比(L/D)は好ましくは3以下であり、さらに好ましくは2以下である。
【0072】
本実施の形態に用いる充填材(B)の平均粒径(平均長径および平均短径などを含む)は、以下のようにして測定することができる。測定対象となる充填材のサンプリングを行い、サンプリングした粒子を走査型電子顕微鏡(SEM)により倍率1千倍から5万倍で撮影し、得られた画像において無作為に選んだ最低100個の充填材粒子の、それぞれの最大粒径を測定し、得られた各最大粒径の相加平均を平均粒径として求める。
【0073】
3.脂肪酸(C)
本実施の形態に用いるオキシメチレン樹脂組成物は、ロボット用外装部品の生産性や物性バランスを維持し、耐久性などを高めるために脂肪酸(C)を含む。
【0074】
この脂肪酸(C)の量としては、質量比[脂肪酸(C)/充填材(B)]が、0.023〜0.1であることが好ましく、0.027〜0.06であることがより好ましく、さらに好ましくは0.03〜0.05である。質量比[脂肪酸(C)/充填材(B)]を前記範囲内とすることにより、生産性を維持することができるため、好ましい。
【0075】
本実施の形態に用いる脂肪酸(C)は、脂肪族基を有する一価または多価カルボン酸、およびこれらの一部に水酸基等の置換基が導入されているもの、またはこれらの酸の酸無水物であることが好ましく、公知のものであれば特に限定されない。例えば、飽和脂肪酸として、酢酸、プロピオン酸、酪酸、吉草酸、カプロン酸、カプリル酸、ラウリン酸、トリデシル酸、ミリスチル酸、パルミチン酸、ヘプタデシル酸、ステアリン酸、ピバリン酸、イソブチル酸、さらにはエチレンジアミン四酢酸などを、不飽和脂肪酸として、オレイン酸、エライジン酸、エルカ酸、リノール酸、リシノール酸などを、脂環式カルボン酸としてナフテン酸などを挙げることができる。これらの中から1種類、または2種類以上を用いてもかまわない。
【0076】
これらのうち、ロボット用外装部品の生産性を高く維持するためには飽和脂肪酸が好ましく、さらにロボット用外装部品において、表面へのカルボン酸のブリードや金型に付着する有機物類の汚染物などの発生を抑制するという観点から、炭素数8から36である飽和脂肪酸から選ぶことが好ましい。例えば、ラウリン酸、トリデシル酸、ミリスチル酸、ペンタデシル酸、パルミチン酸、ヘプタデシル酸、ステアリン酸、ノナデカン酸、アラキン酸、ベヘン酸、リグノセリン酸、セロチン酸、ヘプタコン酸、モンタン酸、アラギン酸等を挙げることができる。
【0077】
特に、含まれる脂肪酸(C)が2種類以上の場合、炭素数12〜27の1価の脂肪酸(C1)と、炭素数28〜36の1価の脂肪酸(C2)とを含むことが好ましい。脂肪酸(C1)および(C2)を含む脂肪酸(C)を用いることにより、物性バランスを維持し、より耐久性などを高めることができるため、好ましい。これらの脂肪酸(C1)および(C2)は、それぞれ1種を単独でまたは2種以上を組み合わせて用いてもよい。
【0078】
脂肪酸(C1)としては、具体的には、ラウリン酸、トリデシル酸、ミリスチン酸、パルミチン酸、ペンタデシル酸、ステアリン酸、ノナデカン酸、アラキン酸、ベヘン酸、リグノセリン酸、セロチン酸、ヘプタコン酸等が挙げられる。
【0079】
また、脂肪酸(C2)としては、具体的には、モンタン酸、メリシン酸等が挙げられる。
【0080】
なお、脂肪酸(C1)および(C2)は、天然のものであっても合成されたものであってもよく、天然のものを用いた場合、本実施の形態に用いるオキシメチレン樹脂組成物が、その脂肪酸(C1)および(C2)と他の天然成分との混合物を含んでいてもよい。上述の1価の脂肪酸(C1)の中では、樹脂組成物中における充填材の凝集を抑えるという観点から、ステアリン酸およびパルミチン酸ならびにそれらの任意の割合の混合物が特に好ましく、脂肪酸(C2)の中では、モンタン酸が特に好ましい。
【0081】
本実施の形態に用いるオキシメチレン樹脂組成物において、ロボット用外装部品の生産性や物性バランスを維持し、耐久性などを高めるために、炭素数28〜36の1価の脂肪酸(C2)に対する炭素数12〜27の1価の脂肪酸(C1)の質量比[(C1)/(C2)]が0.8〜5.5であることが好ましく、1〜5であることがより好ましく、1.1〜4.5であることがさらに好ましい。質量比[(C1)/(C2)]を前記範囲内とすることにより、生産性を維持し、より耐久性などを高めることができるため、好ましい。
【0082】
4.脂肪酸のカルシウム塩(D)
本実施の形態に用いるオキシメチレン樹脂組成物は、ロボット用外装部品の生産性を維持し、耐久性などを高めるため、さらに脂肪酸のカルシウム塩(D)を含むことが好ましい。この脂肪酸のカルシウム塩(D)と脂肪酸(C)との質量比[脂肪酸(C)/脂肪酸のカルシウム塩(D)]は、3〜20であることが好ましく、4〜15であることがより好ましく、さらに好ましくは5〜13である。質量比[(C)/(D)]を前記範囲内とすることにより、生産性を維持し、より耐久性などを高めることができるため、好ましい。
【0083】
脂肪酸のカルシウム塩(D)を構成する脂肪酸は、樹脂組成物により良好な生産性を維持するという観点から、好ましくは上述した(C1)と同種の脂肪酸である。中でも、脂肪酸(C1)がパルミチン酸であり、脂肪酸のカルシウム塩(D)がパルミチン酸カルシウムである組み合わせ、脂肪酸(C1)がステアリン酸であり、脂肪酸のカルシウム塩(D)がステアリン酸カルシウムである組み合わせ、脂肪酸(C1)がベヘン酸であり、脂肪酸のカルシウム塩(D)がベヘン酸カルシウムである組み合わせが好ましく、脂肪酸(C1)が12−ヒドロキシステアリン酸であり、脂肪酸のカルシウム塩(D)がビス(12−ヒドロキシ)ステアリン酸カルシウムである。特には脂肪酸(C1)がステアリン酸であり、脂肪酸のカルシウム塩(D)がステアリン酸カルシウムである組み合わせが好ましい。
【0084】
5.その他の添加剤(E)
本実施の形態に用いるオキシメチレン樹脂組成物は、上記オキシメチレンコポリマー(A)に、添加剤として充填材(B)、脂肪酸(C)を含む。さらに脂肪酸のカルシウム塩(D)を含むことが好ましい。また、オキシメチレン樹脂組成物は、本実施の形態の目的を損なわない範囲で、従来公知のその他の添加剤を含んでもよい。例えば、酸化防止剤、熱安定剤、ホルムアルデヒドや蟻酸の捕捉剤、耐候(光)剤、滑剤、離型剤、結晶核剤、強化材、他の熱可塑性樹脂、柔軟性付与剤が挙げられる。
【0085】
特にロボット用外装部品の意匠性を高めるために着色剤を添加することができる。着色剤としては、有機顔料、無機顔料などが挙げられるが、特に限定されるものではなく、1種および2種以上の着色剤の組合せであってもよい。有機顔料としては、フタロシアニン系顔料、縮合アゾ系顔料、アゾレーキ系顔料、キナクリドン系顔料、ジオキサジン系顔料、イソインドリノン系顔料、縮合多環系顔料等が挙げられる。無機顔料としては、亜鉛華、二酸化チタン、弁柄、酸化クロム、鉄黒等の単純酸化物;カドミウムイエロー、カドミウムオレンジ、カドミウムレッド等の硫化物;黄鉛、亜鉛黄、クロムバーミリオン等のクロム酸塩;紺青等のフェロシアン化物;群青等の珪酸塩;カーボンブラック、金属粉等の無機系色剤が挙げられる。着色剤の添加量は、オキシメチレンコポリマー(A)100質量部に対して10質量部以下が好ましい。この範囲にすることで、ロボット用外装部品の物性バランスを維持し、耐久性などを高めることができる。
【0086】
6.オキシメチレン樹脂組成物の製造方法
オキシメチレン樹脂組成物は、本実施の形態のロボット用外装部品を構成する樹脂組成物であり、上述のように、オキシメチレンコポリマー(A)、充填材(B)、脂肪酸(C)、さらに好ましくは脂肪酸のカルシウム塩(D)やその他の添加剤(E)を含有する。以下では、上記成分(A)〜(E)を全て用いた場合のオキシメチレン樹脂組成物の製造方法を例示的に説明する。
【0087】
上記のオキシメチレンコポリマー(A)、充填材(B)、脂肪酸(C)、脂肪酸のカルシウム塩(D)およびその他の添加剤(E)の混合は、オキシメチレンコポリマー(A)の造粒時に(B)〜(E)を添加し、溶融混練することにより行ってもよい。また、(A)の造粒後、新たに、ヘンシェルミキサー、タンブラーやV字型ブレンダーを用いて(A)〜(E)を混合した後、ニーダー、ロールミル、単軸押出機、二軸押出機や多軸押出機を用いて溶融混錬することにより、オキシメチレン樹脂組成物を得ることもできる。造粒ペレットを用いる場合は、添着剤を用いて分散性を高めてもよい。かかる添着剤として、例えば、脂肪族炭化水素および芳香族炭化水素、並びにこれらの変性物およびこれらの混合物、並びにポリオールの脂肪酸エステルが挙げられる。またさらには、各成分を本実施の形態の好ましい比率でそれぞれ、または一部予め混合後、定量フィーダーを用いて押出機に投入し、造粒してもかまわない。
【0088】
また、オキシメチレンコポリマー(A)に対する(B)〜(E)の分散性を高めるために、混合するオキシメチレンコポリマー(A)のペレットの一部または全量を粉砕して予め混合した後、溶融混合してもよい。このときの加工温度は180〜230℃であることが好ましい。さらに、生産性を保持する観点から、不活性ガスによる置換や、一段および多段ベントで脱気することが好ましい。
【0089】
[3.ロボット用外装部品の製造方法]
本実施の形態のロボット用外装部品の製造方法としては、従来のオキシメチレン樹脂等に用いられる多様な公知の成形方法が挙げられる。
【0090】
かかる成形方法として、特に制限されないが、例えば、押出成形、射出成形、真空成形、ブロー成形、射出圧縮成形、加飾成形、多色成形、ガスアシスト射出成形、発砲射出成形、低圧成形、超薄肉射出成形(超高速射出成形)、金型内複合成形(インサート成形、アウトサート成形)等の成形方法が挙げられる。特に、生産性の面から押出成形、射出成形、射出圧縮成形、または異材を組み合わせる多色成形、金型内複合成形が好ましい。
【0091】
本実施の形態のロボット用外装部品は、複雑な形状における成形性や切削性・後加工性に優れるため、当該ロボット用外装部品に種々の機能を付加しても、優れた生産性を維持し、かつ耐久性などを一層優れたものとすることができる。また、ロボット用外装部品の表面状態は、平滑なものでも、各種シボ加工を施してもかまわない。
【0092】
[4.ロボット用外装部品の使用]
本実施の形態のロボット用外装部品は、通常の外装部品と異なりロボット固有の特殊な環境下で使用される。その使用環境や用途について、以下に説明する。
【0093】
1.使用環境
本実施の形態のロボット用外装部品は、ロボットが稼動部を有するため、該稼動部を保護するために添加される種々の油やグリース(ギア油、作動油、タービン油、防錆油、ポンプ油、リチウム系やモリブデン系やシリコン系グリースなど)などに接触しても、耐久性を有する必要がある。また外装部品として、繰り返し洗浄のため洗剤や溶剤(界面活性剤、金属石鹸、塩素系洗剤、研磨剤・錆落とし、アルコール類やケトン類などの有機薬品など)などと接触しても、ある程度の外観を保持し、意匠性を維持する必要がある。
【0094】
さらには、ロボットの作業目的に応じて、切削油、塗料、薬剤や食品などに接触しても、耐久性を有することが好ましい。また、特定のロボット用外装部品においては、消毒薬・殺菌剤(アルキル化剤やハロゲン化合物や過酸化物などの酸化剤、酸・アルカリ、アルコール類/エタノールやイソプロピルアルコール、ガス状のアルキル化剤や酸化剤/ホルムアルデヒドやオゾン、植物精油や香辛料など天然に存在する殺菌性物質など)などとの断続的な接触において、耐久性を有することが好ましい。また上記同様に外装部品として、それぞれの薬品などと接触しても、ある程度の外観を保持し、意匠性を維持する必要がある。
【0095】
本実施の形態のロボット用外装部品は、上述のような特殊な使用環境下での耐久性、意匠性のための外観保持性に優れるため、油、グリース、洗剤および溶剤からなる群より選択される少なくとも1種と接触する外装部品として使用することができる。
【0096】
本実施の形態のロボット用外装部品は、その耐久性の低下や外観の悪化によっては、ロボット本体から取り外して、別の外装用部品に取替えを行なってもよい。そのために、ボス、リブ、スナップフィット機構やクリップ機構などを備えてもかまわない。
【0097】
2.用途
本実施の形態のロボット用外装部品は、カバー、バスケットやホルダーなどの外装部品・容器類やこれらの一部の部位、バルブやエルボー、ノズルなどの配管・ジョイント類、搬送用のチェーンやコンベアなどに使用される。本実施の形態のロボット用外装部品におけるロボットとしては、特に限定されないが、例えば、OA機器、音楽機器、映像機器、情報通信機器、電気電子機器、自動車、工業機器、農業機器、医療用機器、医薬品加工機器、食品加工機器、住宅用機器および衛生用機器からなる群より選択される少なくとも1種の本体または該本体の部品を生産するためのロボットが挙げられる。
【実施例】
【0098】
以下の実施例により本実施の形態をさらに詳しく説明するが、本実施の形態は以下の実施例により何ら限定されるものではない。
【0099】
[オキシメチレン樹脂組成物(P)の調製]
実施例および比較例の樹脂組成物に用いた成分を以下に説明する。また、各樹脂組成物等を構成する各成分について下記表1〜3に示す。
【0100】
1.オキシメチレンコポリマー(A)
1.1.オキシメチレンコポリマー(A−1)の調製
熱媒を通すことができるジャッケット付きの2軸セルフクリーニングタイプの重合機(L/D=8)を80℃に調整した。該重合機に、トリオキサンを4kg/hrと、コモノマーとして1,3−ジオキソランと、連鎖移動剤としてメチラールとを供給して重合を行なった。コモノマーの供給量は、オキシメチレンコポリマー(A)中のオキシアルキレン成分の含有割合が、オキシメチレン成分に対して、0.6モル%となるように調整を行なった。また同様にメチラールの供給量は、オキシメチレンコポリマー(A)のメルトフローレート(ISO1133条件D、190℃)が3g/10分となるように調整を行なった。さらに重合触媒として三フッ化硼素ジ−n−ブチルエーテラートをトリオキサン1モルに対して1.5×10-5モルとなる量で、連続的に添加し重合を行ない、粗オキシメチレンコポリマーを得た。
【0101】
次に、重合機より排出された粗オキシメチレンコポリマーをトリエチルアミン0.1%水溶液中に投入し重合触媒の失活を行なった。重合触媒の失活した粗オキシメチレンコポリマーを遠心分離機でろ過した。その後、この粗オキシメチレンコポリマー100質量部に対して、第4級アンモニウム化合物として水酸化コリン蟻酸塩(トリエチル−2−ヒドロキシエチルアンモニウムフォルメート)を含有した水溶液1質量部を添加して、均一に混合した後120℃で乾燥した。水酸化コリン蟻酸塩の添加量は、上記式<1>で表される窒素量に換算して20質量ppmとした。当該添加量の調整は、添加する水酸化コリン蟻酸塩を含有した水溶液中の水酸化コリン蟻酸塩の濃度を調整することにより行った。
【0102】
前記乾燥後の粗オキシメチレンコポリマーをベント付き2軸スクリュー式押出機に供給した。押出機中の溶融している粗オキシメチレンコポリマー100質量部に対して、水を0.5質量部添加し、押出機設定温度200℃、押出機における滞留時間7分間の条件で、その不安定末端部分の分解除去処理を行なった。不安定末端部分の分解されたオキシメチレンコポリマーは、ベント真空度20Torrの条件下で脱揮され、さらにオキシメチレンコポリマー100質量部に対し、酸化防止剤としてトリエチレングリコール−ビス−[3−(3−t−ブチル−5−メチル−4−ヒドロキシフェニル)−プロピオネート]0.35質量部を添加し、溶融混練し造粒することによりオキシメチレンコポリマー(A−1)のペレットを得た。
【0103】
1.2.オキシメチレンコポリマー(A−2)の調製
オキシメチレンコポリマー(A)のメルトフローレート(ISO1133条件D、190℃)が12g/10分となるようにメチラールの供給量を調整した以外は、上記1.1.オキシメチレンコポリマー(A−1)の調製と同様にして、オキシメチレンコポリマー(A−2)のペレットを得た。
【0104】
1.3.オキシメチレンコポリマー(A−3)の調製
オキシメチレンコポリマー(A)のメルトフローレート(ISO1133条件D、190℃)が40g/10分となるようにメチラールの供給量を調整した以外は、上記1.1.オキシメチレンコポリマー(A−1)の調製と同様にして、オキシメチレンコポリマー(A−3)のペレットを得た。
【0105】
1.4.オキシメチレンコポリマー(A−4)の調製
オキシメチレンコポリマー(A)中のオキシアルキレン成分の含有割合が、オキシメチレン成分に対して、0.2モル%となるようにコモノマーの供給量を調整した以外は、上記1.2.オキシメチレンコポリマー(A−2)の調製と同様にして、オキシメチレンコポリマー(A−4)のペレットを得た。
【0106】
1.5.オキシメチレンコポリマー(A−5)の調製
オキシメチレンコポリマー(A)中のオキシアルキレン成分の含有割合が、オキシメチレン成分に対して、1.5モル%となるようにコモノマーの供給量を調整した以外は、上記1.2.オキシメチレンコポリマー(A−2)の調製と同様にして、オキシメチレンコポリマー(A−5)のペレットを得た。
【0107】
〈オキシアルキレン成分の含有割合の測定方法〉
上記コモノマーの供給量の調整により得られた各オキシメチレンコポリマーにおけるオキシメチレン成分a(モル数)に対するオキシアルキレン成分b(モル数)の割合(モル%)(以下「(b/a)×100」とも記す。)を下記表1〜3に示す。ここで(b/a)×100は、以下のようにして求めた。
【0108】
得られた各ポリオキシメチレンコポリマーを、溶媒であるヘキサフルオロイソプロパノール(HFIP)−d2(D化率97%、和光純薬98%assay)中に、24時間かけて溶解させることにより、ポリオキシメチレンコポリマーの1.5質量%溶液を調製した。
【0109】
上記のポリオキシメチレンコポリマーの1.5質量%溶液を検体として、JEOL−400核磁気共鳴分光計(1H:400MHz)を用い、55℃および積算回数500回の条件下、オキシメチレン成分aと、当該成分a以外のオキシアルキレン成分bとの帰属ピークを積分した。このようにして得られた積分値から、オキシメチレン成分a(モル数)に対するオキシアルキレン成分b(モル数)の割合(モル%)「(b/a)×100」を求めた。
【0110】
〈メルトフローレートの測定方法〉
上記連鎖移動剤の供給量の調整により得られた各オキシメチレンコポリマーのメルトフローレートを下記表1〜3に示す。ここでメルトフローレート(ISO1133条件D、190℃)は、メルトインデクサー(東洋精機(株)社製、F−W01)を用いて求めた。
【0111】
2.オキシメチレンホモポリマー(A’)の調製
攪拌羽根の付いた、連続式にモノマー等を供給できるタンクに、脱水したホルムアルデヒドガス100質量部、触媒としてジメチルジステアリルアンモニウムアセテート0.1質量部を投入した。次いで、該タンクに、分子量調節剤として無水酢酸を、重合後のオキシメチレンホモポリマーのメルトフローレートが12g/10分となるような量で連続的に供給しながら、58℃で重合を行い、粗ポリオキシメチレンホモポリマーを得た。
【0112】
得られた粗ポリオキシメチレンホモポリマーを、ヘキサンと無水酢酸との1対1混合溶媒に入れ、140℃で2時間、末端基を化学処理した。末端基を化学処理した粗ポリオキシメチレンホモポリマーを120℃、3時間、1mmHgの条件で真空乾燥した。次に、乾燥した粗オキシメチレンホモポリマー100質量部に対して、酸化防止剤としてトリエチレングリコール−ビス〔3−(3−t−ブチル−5−メチル−4−ヒドロキシフェニル)プロピオネート〕を0.35質量部添加し、ベント付2軸押出機で溶融混練することによりオキシメチレンホモポリマーのペレットを得た。得られたオキシメチレンホモポリマー(A’)について、上記同様のメルトフローレート(ISO1133条件D、190℃)の測定を行なったところ、12g/10分であった。
【0113】
3.充填材(B)
充填材(B)として、用いた充填材(B−1)〜(B−9)を以下に列挙する。市販品を原料として、下記に示す平均粒径の充填材を得た。該平均粒径は、以下のとおり求めた。測定対象となる充填材粒子のサンプリングを行い、サンプリングした粒子を走査型電子顕微鏡(SEM)により倍率1千倍から5万倍で撮影し、得られた画像において無作為に選んだ最低100個の充填材粒子の、それぞれの最大粒径を測定し、得られた各最大粒径の相加平均を平均粒径として求めた。
【0114】
(B−1):白石工業製炭酸カルシウム「Brilliant−1500」(平均粒径150nm、表面未処理、pH=9.7)
(B−2):日本タルク製含水珪酸マグネシム「MS」(平均粒径11μm、表面未処理)
(B−3):白石工業製炭酸カルシウム「白艶華PZ」(平均粒径80nm、表面未処理、pH=9.3)を分級し、平均粒径30nmの粒子を採取した。
【0115】
(B−4):白石工業製炭酸カルシウム「PC−700」(平均粒径1.2μm、表面未処理、pH=9.9)を分級し、平均粒径900nmの粒子を採取した。
【0116】
(B−5):巴工業社製珪酸カルシウム「NYAD1250」(平均粒径5μm、L/D=3、表面未処理)
(B−6):協和化学工業製ハイドロタルサイト「DHT−4C」(平均粒径0.5μm、表面未処理)
(B−7):白石工業製炭酸カルシウム「Brilliant−1500」(平均粒径150nm、表面未処理、pH=9.1)
(B−8):白石工業製炭酸カルシウム「Brilliant−1500」(平均粒径150nm、表面未処理、pH=10.2)
(B−9):白石工業製炭酸カルシウム「Vigot−15」(平均粒径150nm、表面脂肪酸処理)
4.脂肪酸(C)
脂肪酸(C)として、用いた炭素数12〜27の1価の脂肪酸(C1)と炭素数28〜36の1価の脂肪酸(C2)とを以下に列挙する。
【0117】
(C1−1):和光純薬工業製 ステアリン酸(融点64℃)
(C1−2):和光純薬工業製 ベヘン酸(融点82℃)
(C2−1):和光純薬工業製 モンタン酸(融点84℃)
(C2−2):和光純薬工業製 メリシン酸(融点94℃)
4.脂肪酸のカルシウム塩(D)
脂肪酸のカルシウム塩(D)として、用いた(D−1)と(D−2)とを以下に列挙する。
【0118】
(D−1):堺化学工業製 ステアリン酸カルシウム「SC−100」
(D−2):堺化学工業製 ビス(12−ヒドロキシステアリン酸)カルシウム「SC−120H」
[オキシメチレン樹脂組成物等のペレット(P)の製造]
〈ペレット(P1〜P28)の製造〉
オキシメチレン樹脂組成物のペレット(P1〜P28)を、2軸押出機(東芝機械(株)製、商品名「TEM−26SS押出機」、L/D=48、ベント付き)を用いて以下のとおり製造した。
【0119】
前記2軸押出機のホッパー下を冷却水により冷却し、210〜215℃に設定し、ダイヘッドを210℃に設定した。この温度条件で、表1および2に示すように、オキシメチレンコポリマー(A)、充填材(B)、脂肪酸(C)、必要に応じて脂肪酸のカルシウム塩(D)を、前記2軸押出機のトップより定量フィーダーを用いて供給した。スクリュー回転数150rpmの条件で前記各成分の混合物を溶融混練し、ベントより脱気し、ダイヘッドから溶融混練物を押し出し造粒し、オキシメチレン樹脂組成物のペレット(P1〜P28)を得た。なお、造粒中にオキシメチレン樹脂組成物の生産性を後述のとおり評価した。
【0120】
〈ペレット(P29〜P31)の製造〉
表3に示すように、上記調製したオキシメチレンコポリマー(A−1)〜(A−3)だけを2軸押出機に供給した((B)〜(D)成分を供給しなかった)以外は、上述のオキシメチレン樹脂組成物のペレット(P1〜P3)の製造と同様の方法でオキシメチレンコポリマー(A−1)〜(A−3)のペレット(P29〜P31)を製造した。
【0121】
〈ペレット(P32)の製造〉
表3に示すように、オキシメチレンコポリマー(A−1)に代えて、上記調製したオキシメチレンホモポリマー(A’)を用いた以外は、上述のオキシメチレン樹脂組成物のペレット(P2)の製造と同様の方法でオキシメチレン樹脂組成物のペレット(P32)を製造した。
【0122】
〈ペレット(P33)の製造〉
表3に示すように、脂肪酸(C)および脂肪酸のカルシウム塩(D)を供給しなかった以外は、上述のオキシメチレン樹脂組成物のペレット(P2)と同様の方法でオキシメチレン樹脂組成物のペレット(P33)を製造した。
【0123】
なお、後述するとおり、上記ペレット(P29〜P33)を造粒する際も、生産性や状態観察を行い、充填材を含まない上記ペレット(P30)の場合を評価の基準とした。
【0124】
【表1】
【0125】
【表2】
【0126】
【表3】
[実施例1〜28]
上記製造したオキシメチレン樹脂組成物のペレット(P1〜28)を下記条件で射出成形することにより、図1に示す形状の各成形片(ロボット用外装部品に相当)を作製した。作製した各成形片について、後述のとおり各評価を行った。評価結果を表4および表5に示す。
【0127】
射出成形機:(株)日本精鋼所製;J110AD−180H、
シリンダー温度:200℃、
射出圧力:80MPa、
射出時間:40秒、
冷却時間:20秒、
金型温度:85℃。
【0128】
[比較例1〜5]
上記製造したペレット(P29〜33)を実施例1と同様の条件で射出成形することにより、図1に示す形状の各成形片(ロボット用外装部品に相当)を作製した。作製した各成形片について、後述のとおり各評価を行った。評価結果を表4に示す。
【0129】
[評価項目]
1.生産性の評価
ロボット用外装部品の生産性の評価は、オキシメチレン樹脂組成物等のペレットの生産性および外装部品の代表として図1に示す成形片の成形性および品位により行った。
【0130】
(1)オキシメチレン樹脂組成物等の生産性評価
オキシメチレン樹脂組成物等の生産性評価は、2軸押出機のトルクを、充填材を含まないペレット(P30)を造粒した場合と同じになるように調整して造粒したときの、オキシメチレン樹脂組成物等の単位時間当たりの平均造粒量、ストランドの状態、並びにペレットの外観および臭気などにより、総合的に行った。具体的には、充填材を含まないペレット(P30)を造粒した場合を評価の基準として、以下のとおりオキシメチレン樹脂組成物等の生産性評価を行った。
【0131】
(生産性評価)
◎:平均造粒量の低下が5%未満でペレット(P30)の生産性と同等の場合、
○:平均造粒量の低下が5%以上15%未満の場合、
◇:平均造粒量の低下が15%以上25%未満の場合、
△:平均造粒量の低下が25%以上35%未満、またはペレットの着色・臭いなどが若干発生した場合、
×:平均造粒量の低下が35%以上、またはストランドギレもしくはストランド径が不安定になったりするなど明らかに造粒状態が悪化した場合。
【0132】
(2)ロボット用外装部品の品位評価
ロボット用外装部品の品位の評価には、実施例および比較例で作製した成形片を用いて行なった。
【0133】
なお、実施例および比較例における成形片の成形は100ショット実施し、その中で安定してきた40ショットから100ショットまでの計量時間や離型状況などの運転状態の観察と、80ショットから100ショットの成形片の品位(外観(光沢、平滑性、シルバーやフローマークなど)や色、それらの安定性など)の目視による観察とを行なった。
【0134】
具体的には、充填材を含まないペレット(P30)を造粒した場合を評価基準として、以下のとおりロボット用外装部品の品位評価を行った。
【0135】
(品位評価)
◎:外観がペレット(P30)よりも良好な場合、
○:外観がペレット(P30)と同等レベルの場合、
◇:若干外観の低下が確認された場合、
△:機能的には問題ないが着色やシルバーなどが部分的に確認された場合、
×:意匠面の中央にシルバーなどが確認されたり、運転状態や品位がショットにより安定しなかったりなど、ロボット用外装部品の使用に際し明らかに不良と判断された場合。
【0136】
2.物性バランスの評価
物性バランスの評価は、実施例および比較例で作製した成形片の図2に示す部分を万能試験機(島津製作所製、オートグラフAGS−X)で引張試験(試験方法としてはISO527に準拠、但し伸度はチャック間伸度とした)をn=5で実施し、得られた弾性率(TM)と伸度(TE)とをそれぞれ相加平均した値を用いて行なった。
【0137】
比較として用いる値は、比較例1〜3で作製した成形片の物性バランスであり、これらの弾性率と伸度との結果を図3に示す。
【0138】
これらの弾性率と伸度との結果より、比較例1〜3で作製した成形片の物性バランスの関係は下記数式<2>で表わすことができる。
【0139】
【数2】
実施例1〜28ならびに比較例4および5で作製した成形片の伸度(TE)を用いて、上記数式<2>から求めた弾性率(TM’)と、実際に引張試験により得られた弾性率(TM)とを比較することにより物性バランスの評価を行なった。
【0140】
具体的には、下記数式<3>の計算により得られたバランス評価値により下記基準で物性バランスの評価を行った。
【0141】
(基準)
×:バランス評価値が0%未満の場合((TM)が(TM’)より小さい場合)、すなわち充填材を含まないペレット(P29〜31)から作製した比較例1〜3の成形片の物性バランスより低下している場合、
△:バランス評価値が0%以上5%未満の場合、
◇:バランス評価値が5%以上10%未満の場合、
○:バランス評価値が10%以上15%未満の場合、
◎:バランス評価値が15%以上の場合。
【0142】
【数3】
3.通常の耐久性の評価
耐久性の評価には、実施例および比較例で作製した成形片を使用した。該成形片について、下記(1)または(2)のとおり、作動油または洗浄剤を作用させた後、上記2.物性バランスの評価と同様の引張試験を実施した。該引張試験を、n=5で行い、各試験片の引張伸度を相加平均により求めた。該引張伸度と、上記2.物性バランスの評価で求めた耐久性評価前の引張伸度との変化により、通常の耐久性の評価を行なった。また、当該耐久性評価前後において、成形片の意匠面の外観保持性の変化も観察した。
【0143】
(1)耐作動油性
耐作動油性を作動油の代表としてシェルテラスオイル32(昭和シェル石油製)に対する耐久性により評価した。具体的には、実施例および比較例で作製した成形片を用いて、同作動油に試験片を浸漬後密閉し、80℃で800時間経過後の試験片の引張伸度の低下の割合を求め、下記評価基準により評価を行なった。なお、充填材を含まないペレット(P30)から作製した比較例2の成形片の引張伸度の低下率は50%以上であった。
【0144】
(評価基準)
×:引張伸度の低下率が50%以上または外観(クラックの発生、光沢や色の変化など)が著しく変化した場合、
△:少し改善がみられ引張伸度の低下率が40%以上50%未満、または外観の変化が若干みられたが、使用において問題ない場合、
◇:意匠面に大きな外観の変化がなく、引張伸度の低下率が30%以上40%未満の場合、
○:外観変化がなく、引張伸度の低下率が20%以上30%未満の場合、
◎:外観変化がなく、引張伸度の低下率が20%未満と大きく改善が見られた場合。
【0145】
(2)耐洗剤性
耐洗剤性を洗剤の代表として復活洗浄剤/錆取用(カンペハピオ製)に対する耐久性により評価した。具体的には、実施例および比較例で作製した成形片を用いて、同洗浄剤に試験片を浸漬後密閉し、30℃で800時間経過後の試験片の引張伸度の低下の割合を求め、下記評価基準により評価を行なった。なお、充填材を含まないペレット(P30)から作製した比較例2の成形片の引張伸度の低下率は50%以上であった。
【0146】
(評価基準)
×:引張伸度の低下率が50%以上または外観(クラックの発生、光沢や色の変化など)が著しく変化した場合、
△:少し改善がみられ引張伸度の低下率が40%以上50%未満、または外観の変化が若干みられたが、使用において問題ない場合、
◇:意匠面に大きな外観の変化がなく、引張伸度の低下率が30%以上40%未満の場合、
○:外観変化がなく、引張伸度の低下率が20%以上30%未満の場合、
◎:外観変化がなく、引張伸度の低下率が20%未満と大きく改善が見られた場合。
【0147】
4.特殊環境に対する耐久性の評価
特殊環境に対する耐久性の評価には、実施例および比較例で作製した成形片を使用した。該成形片について、下記(1)または(2)のとおり、切削油や消毒剤を作用させた後、上記2.物性バランスの評価と同様の引張試験を実施した。該引張試験を、n=5で行い、各試験片の引張伸度を相加平均により求めた。該引張伸度と、上記2.物性バランスの評価で求めた耐久性評価前の引張伸度との変化により、特殊環境に対する耐久性の評価を行なった。また、当該耐久性評価前後において、成形片の意匠面の外観保持性の変化も観察した。
【0148】
(1)耐切削油性
耐切削油性を切削油の代表としてユシロンカットUB100(ユシロ化学工業製)に対する耐久性により評価した。具体的には、実施例および比較例で作製した成形片を用いて、同切削油に試験片を浸漬後密閉し、80℃で800時間経過後の試験片の引張伸度の低下の割合を求め、下記評価基準により評価を行なった。なお、充填材を含まないペレット(P30)から作製した比較例2の成形片の引張伸度の低下率は50%以上であった。
【0149】
(評価基準)
×:引張伸度の低下率が50%以上または外観(クラックの発生、光沢や色の変化など)が著しく変化した場合、
△:少し改善がみられ引張伸度の低下率が40%以上50%未満、または外観の変化が若干みられたが、使用において問題ない場合、
◇:意匠面に大きな外観の変化がなく、引張伸度の低下率が30%以上40%未満の場合、
○:外観変化がなく、引張伸度の低下率が20%以上30%未満の場合、
◎:外観変化がなく、引張伸度の低下率が20%未満と大きく改善が見られた場合。
【0150】
(2)耐消毒剤性
耐消毒剤性を消毒剤の代表としてオキシドール(日本薬局方製)に対する耐久性により評価した。具体的には、実施例および比較例で作製した成形片を用いて、同消毒剤に試験片を浸漬後密閉し、20℃で4000時間後の試験片の引張伸度の低下の割合を求め、下記評価基準により評価を行なった。
なお、充填材を含まないペレット(P30)から作製した比較例2の成形片の引張伸度の低下率は50%以上であった。
【0151】
(評価基準)
×:引張伸度の低下率が50%以上または外観(クラックの発生、光沢や色の変化など)が著しく変化した場合、
△:少し改善がみられ引張伸度の低下率が40%以上50%未満、または外観の変化が若干みられたが、使用において問題ない場合、
◇:意匠面に大きな外観の変化がなく、引張伸度の低下率が30%以上40%未満の場合、
○:外観変化がなく、引張伸度の低下率が20%以上30%未満の場合、
◎:外観変化がなく、引張伸度の低下率が20%未満と大きく改善が見られた場合。
【0152】
[実施例1〜11、比較例1〜5の評価結果]
実施例1〜11、比較例1〜5の評価結果を下記表4に示す。
【0153】
実施例1〜11、比較例1〜5の評価結果から、本実施の形態のロボット用外装部品は、生産性を維持でき優れた物性バランスを有するとともに、通常の耐久性や特殊環境に対する耐久性に優れることがわかった。
【0154】
実施例1〜5、比較例1〜3、4の結果から、特に、好ましいメルトフローレートおよびコモノマー量のオキシメチレンコポリマー(A)を含む樹脂組成物からなるロボット用外装部品は、より生産性を維持でき優れた物性バランスを有する傾向があることがわかった。
【0155】
実施例2、6〜8、比較例1〜3の結果から、特に、好ましい量の充填材(B)を含む樹脂組成物からなるロボット用外装部品は、より生産性を維持でき優れた耐久性を有する傾向があることがわかった。
【0156】
実施例2、9〜11、比較例1〜3、5の結果から、特に、好ましい量の脂肪酸(C)を含む樹脂組成物からなるロボット用外装部品は、より生産性を維持でき優れた耐久性を有する傾向があることがわかった。
【0157】
【表4】
[実施例2、12〜28、比較例1〜3の評価結果]
実施例12〜28の評価結果を下記表5に示す。
【0158】
実施例12〜28の評価結果から、本実施の形態のロボット用外装部品は、生産性を維持でき優れた物性バランスを有するとともに、通常の耐久性や特殊環境に対する耐久性に優れることがわかった。
【0159】
実施例2、12、13、比較例1〜3の結果から、特に、好ましい粒径の無機酸塩系充填材(B)を含む樹脂組成物からなるロボット用外装部品は、より生産性を維持でき優れた耐久性を有する傾向があることがわかった。
【0160】
実施例2、14〜16、比較例1〜3の結果から、特に、炭酸塩系および珪酸塩系の無機酸塩系充填材を含む樹脂組成物からなるロボット用外装部品は、より生産性を維持でき優れた物性バランスおよび耐久性を有する傾向があることがわかった。
【0161】
実施例2、17〜19、比較例1〜3の結果から、特に、炭酸カルシウムを含み、好ましいpHであり、表面処理がなされていない充填材(B)を含む樹脂組成物からなるロボット用外装部品は、より優れた物性バランスおよび耐久性を有する傾向があることがわかった。
【0162】
実施例2、20〜25、比較例1〜3の結果から、特に、脂肪酸(C)として炭素数12〜27の1価の脂肪酸(C1)と、炭素数28〜36の1価の脂肪酸(C2)とを、好ましい比率で含む樹脂組成物からなるロボット用外装部品は、より優れた物性バランスおよび耐久性を有する傾向があることがわかった。
【0163】
実施例2、26〜28、比較例1〜3の結果から、特に、好ましい量の脂肪酸のカルシウム塩(D)を含む樹脂組成物からなるロボット用外装部品は、より生産性を維持でき優れた耐久性を有する傾向があることがわかった。
【0164】
【表5】
【産業上の利用可能性】
【0165】
本発明は、特定のオキシメチレン樹脂組成物を含有するロボット用外装部品に関して、その生産性および物性バランスを従来技術に比して損なうことなく、従来技術よりも一層優れた耐久性などを有するロボット用外装部品を提供することができるという点において、産業上の利用可能性を有する。
【特許請求の範囲】
【請求項1】
オキシメチレンコポリマー(A)と充填材(B)と脂肪酸(C)とを含むオキシメチレン樹脂組成物を含有するロボット用外装部品。
【請求項2】
該オキシメチレンコポリマー(A)が、オキシメチレン成分と、該オキシメチレン成分以外のオキシアルキレン成分とを含み、
該オキシアルキレン成分の含有割合が、該オキシメチレン成分に対して、0.3〜1.3モル%である、請求項1記載のロボット用外装部品。
【請求項3】
該充填材(B)の含有量が12〜35質量%であるオキシメチレン樹脂組成物を含有する、請求項1または2記載のロボット用外装部品。
【請求項4】
該充填材(B)が、全充填材の質量に対する60%以上が平均粒径0.04〜0.8μmの無機酸塩系充填材である、請求項1〜3のいずれか一項記載のロボット用外装部品。
【請求項5】
該充填材(B)が、炭酸塩系充填材および珪酸塩系充填材を含む、請求項1〜4のいずれか一項記載のロボット用外装部品。
【請求項6】
該充填材(B)が、JIS K5101試験法によるpHが9.2以上10.0以下であり、かつ表面処理がなされていない炭酸カルシウムを含む、請求項1〜5のいずれか一項記載のロボット用外装部品。
【請求項7】
該脂肪酸(C)と該充填材(B)との質量比[(C)/(B)]が0.027〜0.06である、請求項1〜6のいずれか一項記載のロボット用外装部品。
【請求項8】
該脂肪酸(C)が、炭素数12〜27の1価の脂肪酸(C1)と、炭素数28〜36の1価の脂肪酸(C2)とを含む、請求項1〜7のいずれか一項記載のロボット用外装部品。
【請求項9】
該脂肪酸(C1)と該脂肪酸(C2)との質量比[(C1)/(C2)]が1〜5である、請求項8記載のロボット用外装部品。
【請求項10】
該オキシメチレン樹脂組成物が、さらに脂肪酸のカルシウム塩(D)を含む、請求項1〜9のいずれか一項記載のロボット用外装部品。
【請求項11】
該脂肪酸(C)と該脂肪酸のカルシウム塩(D)との質量比[(C)/(D)]が4〜15である、請求項10記載のロボット用外装部品。
【請求項12】
油、グリース、洗剤および溶剤からなる群より選択される少なくとも1種と接触する外装部品として使用する、請求項1〜11のいずれか一項記載のロボット用外装部品。
【請求項13】
該ロボットが、OA機器、音楽機器、映像機器、情報通信機器、電気電子機器、自動車、工業機器、農業機器、医療用機器、医薬品加工機器、食品加工機器、住宅用機器および衛生用機器からなる群より選択される少なくとも1種の本体または該本体の部品を生産するためのロボットである、請求項1〜12のいずれか一項記載のロボット用外装部品。
【請求項1】
オキシメチレンコポリマー(A)と充填材(B)と脂肪酸(C)とを含むオキシメチレン樹脂組成物を含有するロボット用外装部品。
【請求項2】
該オキシメチレンコポリマー(A)が、オキシメチレン成分と、該オキシメチレン成分以外のオキシアルキレン成分とを含み、
該オキシアルキレン成分の含有割合が、該オキシメチレン成分に対して、0.3〜1.3モル%である、請求項1記載のロボット用外装部品。
【請求項3】
該充填材(B)の含有量が12〜35質量%であるオキシメチレン樹脂組成物を含有する、請求項1または2記載のロボット用外装部品。
【請求項4】
該充填材(B)が、全充填材の質量に対する60%以上が平均粒径0.04〜0.8μmの無機酸塩系充填材である、請求項1〜3のいずれか一項記載のロボット用外装部品。
【請求項5】
該充填材(B)が、炭酸塩系充填材および珪酸塩系充填材を含む、請求項1〜4のいずれか一項記載のロボット用外装部品。
【請求項6】
該充填材(B)が、JIS K5101試験法によるpHが9.2以上10.0以下であり、かつ表面処理がなされていない炭酸カルシウムを含む、請求項1〜5のいずれか一項記載のロボット用外装部品。
【請求項7】
該脂肪酸(C)と該充填材(B)との質量比[(C)/(B)]が0.027〜0.06である、請求項1〜6のいずれか一項記載のロボット用外装部品。
【請求項8】
該脂肪酸(C)が、炭素数12〜27の1価の脂肪酸(C1)と、炭素数28〜36の1価の脂肪酸(C2)とを含む、請求項1〜7のいずれか一項記載のロボット用外装部品。
【請求項9】
該脂肪酸(C1)と該脂肪酸(C2)との質量比[(C1)/(C2)]が1〜5である、請求項8記載のロボット用外装部品。
【請求項10】
該オキシメチレン樹脂組成物が、さらに脂肪酸のカルシウム塩(D)を含む、請求項1〜9のいずれか一項記載のロボット用外装部品。
【請求項11】
該脂肪酸(C)と該脂肪酸のカルシウム塩(D)との質量比[(C)/(D)]が4〜15である、請求項10記載のロボット用外装部品。
【請求項12】
油、グリース、洗剤および溶剤からなる群より選択される少なくとも1種と接触する外装部品として使用する、請求項1〜11のいずれか一項記載のロボット用外装部品。
【請求項13】
該ロボットが、OA機器、音楽機器、映像機器、情報通信機器、電気電子機器、自動車、工業機器、農業機器、医療用機器、医薬品加工機器、食品加工機器、住宅用機器および衛生用機器からなる群より選択される少なくとも1種の本体または該本体の部品を生産するためのロボットである、請求項1〜12のいずれか一項記載のロボット用外装部品。
【図1】

【図2】
【図3】
【図2】
【図3】
【公開番号】特開2013−6913(P2013−6913A)
【公開日】平成25年1月10日(2013.1.10)
【国際特許分類】
【出願番号】特願2011−138879(P2011−138879)
【出願日】平成23年6月22日(2011.6.22)
【出願人】(303046314)旭化成ケミカルズ株式会社 (2,513)
【Fターム(参考)】
【公開日】平成25年1月10日(2013.1.10)
【国際特許分類】
【出願日】平成23年6月22日(2011.6.22)
【出願人】(303046314)旭化成ケミカルズ株式会社 (2,513)
【Fターム(参考)】
[ Back to top ]