
ロボット装置、音楽出力方法及び音楽出力プログラム
【課題】本発明は、ロボット装置の使い勝手を向上させる。
【解決手段】本発明は、可動部2を有するロボット装置1において、受信部3により音楽データを受信して出力部4により音楽として出力しながら、分析部5によりその音楽データを分析すると共に、設定部6により音楽データの分析結果に基づいて、音楽に対応する可動部動きパターンを設定して、駆動制御部7により、当該設定した可動部動きパターンに応じて可動部2を駆動することにより、ユーザに対し多数の音楽データを記憶するように操作させることなく、また何度も異なる音楽データを記憶し直すように操作させることもなく、容易に、より多くの音楽に合わせて可動部2を動かして見せることができ、ロボット装置1の使い勝手を向上させることができる。
【解決手段】本発明は、可動部2を有するロボット装置1において、受信部3により音楽データを受信して出力部4により音楽として出力しながら、分析部5によりその音楽データを分析すると共に、設定部6により音楽データの分析結果に基づいて、音楽に対応する可動部動きパターンを設定して、駆動制御部7により、当該設定した可動部動きパターンに応じて可動部2を駆動することにより、ユーザに対し多数の音楽データを記憶するように操作させることなく、また何度も異なる音楽データを記憶し直すように操作させることもなく、容易に、より多くの音楽に合わせて可動部2を動かして見せることができ、ロボット装置1の使い勝手を向上させることができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はロボット装置、音楽出力方法及び音楽出力プログラムに関し、例えば音楽に合わせて可動部を動かす音楽ロボット装置に適用して好適なものである。
【背景技術】
【0002】
従来のロボット装置は、腕部が動作する際に描く軌道を当該腕部の平均移動速度と共に動作パターンとして記憶している。またロボット装置は、音楽データに基づく音楽の種々のリズムを、それぞれ腕部の異なる平均移動速度の範囲と対応付けている。この状態でロボット装置は、音楽データを再生処理したとき、かかる音楽データに基づく音楽のリズムを抽出すると共に、当該抽出したリズムに対応する平均移動速度の範囲を決定する。そしてロボット装置は、その決定した平均移動速度の範囲に合う動作パターンを選択し、当該選択した動作パターンで腕部を動かすことにより、音楽を出力しながらダンスを踊っているように動作していた(例えば、特許文献1参照)。
【特許文献1】特開2005−231012公報(第1頁、第15頁、第16頁)
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところが、かかる構成のロボット装置は、内部のメモリに音楽データを記憶しており、当該メモリに記憶している音楽データを再生処理しながらダンスを踊っているように動作していた。このため、かかるロボット装置は、ダンスを踊るように動作するときの音楽の種類を増やすような場合、ユーザに対し、記憶容量の比較的大きいメモリに多数の音楽データを記憶するように操作させ、又は記憶容量の比較的小さいメモリに何度も異なる音楽データを記憶し直すように操作させる必要があり、使い勝手が良いとは言い難い問題があった。
【0004】
本発明は以上の点を考慮してなされたもので、使い勝手を向上し得るロボット装置、音楽出力方法及び音楽出力プログラムを提案しようとするものである。
【課題を解決するための手段】
【0005】
かかる課題を解決するため本発明においては、可動部を有するロボット装置において、受信部により音楽データを受信して出力部により音楽として出力しながら、分析部によりその音楽データを分析すると共に、設定部により音楽データの分析結果に基づいて、音楽に対応する可動部動きパターンを設定して、駆動制御部により、当該設定した可動部動きパターンに応じて可動部を駆動制御するようにした。
【0006】
従って本発明では、ユーザに対し、ロボット装置に多数の音楽データを記憶するように操作させることなく、また何度も異なる音楽データを記憶し直すように操作させることもなく、容易に、より多くの音楽に合わせて可動部を動かして見せることができる。
【発明の効果】
【0007】
本発明によれば、可動部を有するロボット装置において、受信部により音楽データを受信して出力部により音楽として出力しながら、分析部によりその音楽データを分析すると共に、設定部により音楽データの分析結果に基づいて、音楽に対応する可動部動きパターンを設定して、駆動制御部により、当該設定した可動部動きパターンに応じて可動部を駆動制御するようにしたことにより、ユーザに対し、ロボット装置に多数の音楽データを記憶するように操作させることなく、また何度も異なる音楽データを記憶し直すように操作させることもなく、容易に、より多くの音楽に合わせて可動部を動かして見せることができ、かくして使い勝手を向上し得るロボット装置、音楽出力方法及び音楽出力プログラムを実現することができる。
【発明を実施するための最良の形態】
【0008】
以下図面について、本発明の一実施の形態を詳述する。
【0009】
(1)音楽ロボット装置の概要
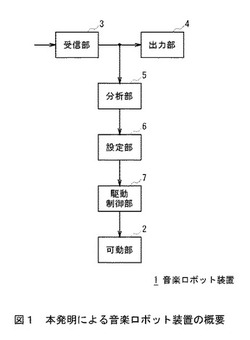
図1において、1は全体として本発明を適用した音楽ロボット装置の構成の概要を示す。かかる音楽ロボット装置1は、可動部2を有している。また音楽ロボット装置1において受信部3は、音楽データを受信する。さらに音楽ロボット装置1において出力部4は、受信部3により受信されている音楽データを音楽として出力する。さらに音楽ロボット装置1において分析部5は、受信部3により受信されている音楽データを分析する。さらにまた音楽ロボット装置1において設定部6は、分析部5により分析されている音楽データの分析結果に基づいて、出力部4により出力される音楽に対応する可動部動きパターンを設定する。そして音楽ロボット装置1において駆動制御部7は、受信部3により音楽データが受信されながら出力部4により音楽として出力されていると、設定部6により設定された可動部動きパターンに応じて可動部2を駆動制御する。
【0010】
かかる構成により音楽ロボット装置1は、ユーザに対し、多数の音楽データを記憶するように操作させることなく、また何度も異なる音楽データを記憶し直すように操作させることもなく、容易に、より多くの音楽に合わせて可動部2を動かして見せることができる。よって音楽ロボット装置1は、使い勝手を向上させることができる。
【0011】
(2)音楽再生システムの構成
図2において、10は全体として音楽再生システムを示す。かかる音楽再生システム10は、本発明を適用した音楽ロボット装置11とパーソナルコンピュータ12とを、例えば、近距離無線通信技術であるBlue toothに準拠して無線接続し得るようになされている。
【0012】
図3(A)及び(B)並びに図4に示すように、音楽ロボット装置11は、例えば全体として略楕円体状の装置筺体(以下、これを楕円体状筐体と呼ぶ)20を有している。かかる楕円体状筐体20は、その中央の略樽型形状の部分でなる筐体中央部21の互いに対向する一対の端部のうち、一方の端部(以下、これを右側端部と呼ぶ)側に略円錐台形状の部分でなる第1の筐体回動部(以下、これを筐体右側回動部と呼ぶ)22が設けられている。また楕円体状筐体20は、筐体中央部21の他方の端部(以下、これを左側端部と呼ぶ)側に、略円錐台形状の部分でなる第2の筐体回動部(以下、これを筐体左側回動部と呼ぶ)23が設けられている。
【0013】
さらに楕円体状筐体20は、筐体右側回動部22の右側に、キャップ形状の部分でなる第1の筐体開閉部(以下、これを筺体右側開閉部と呼ぶ)24が設けられている。さらにまた楕円体状筐体20は、筐体左側回動部23の左側に、キャップ形状の部分でなる第2の筐体開閉部(以下、これを筺体左側開閉部と呼ぶ)25が設けられている。
【0014】
そして楕円体状筐体20の中心点P1から当該楕円体状筐体20表面の最も遠い右側及び左側の両頂点P2、P3を直線で結ぶ線分(すなわち、楕円体の長軸)を水平回動軸線L1とすると、筐体右側回動部22は、筐体中央部21の右側端部に対し、当該水平回動軸線L1を中心にして軸回り一方向D1及びこれとは逆の軸回り他方向に回動可能に枢支されている。また筐体左側回動部23は、筐体中央部21の左側端部に対し、水平回動軸線L1を中心にして軸回り一方向D1及び軸回り他方向に回動可能に枢支されている。
【0015】
さらに図5に示すように、筐体右側開閉部24は、筐体右側回動部22に対し、当該筐体右側回動部22の右側縁部22Aの所定位置に設けられたヒンジ部26を介して所定角度範囲で開閉可能に取り付けられている。因みに筐体右側開閉部24は、筐体右側回動部22の右側縁部22Aに対し開口縁部24Aを当接させる位置から、右側縁部22Aと開口縁部24Aとの開き角度が略90度等となる位置までの所定角度範囲内で任意の角度に開くようになされている。
【0016】
一方、筐体左側開閉部25は、筐体左側回動部23に対し、当該筐体左側回動部23の左側縁部23Aの所定位置に設けられたヒンジ部27を介して所定角度範囲で開閉可能に取り付けられている。因みに筐体左側開閉部25は、筐体左側回動部23に対し、左側縁部23Aに対し開口縁部25Aを当接させる位置から、左側縁部23Aと開口縁部25Aとの開き角度が略90度等となる位置までの所定角度範囲で任意の角度に開くようになされている。
【0017】
さらに筐体右側回動部22は、筒状に形成されており、内部にステレオ用の一対の第1及び第2のスピーカ28及び29のうち右チャンネル用の第1のスピーカ(以下、これを右スピーカと呼ぶ)28が円形の振動板の正面のみを右側縁部22Aの開口から露出させて収納されている。ここで筐体右側開閉部24は、筐体左側開閉部25とは独立して開閉し得るようになされている。そして筐体右側開閉部24は、ヒンジ部26を介して回転して、開口縁部24Aを筐体右側回動部22の右側縁部22Aに当接させて閉じた場合、右スピーカ28の振動板を外部から隠すことができる。また筐体右側開閉部24は、ヒンジ部26を介して回転して、開口縁部24Aを筐体右側回動部22の右側縁部22Aから離間させるように開いた場合、右スピーカ28の振動板を外部に露出させ得るようになされている。
【0018】
一方、筐体左側回動部23も、筒状に形成されており、内部に右スピーカ28と同様構成及び同様形状の左チャンネル用の第2のスピーカ(以下、これを左スピーカと呼ぶ)29が円形の振動板の正面のみを左側縁部23Aの開口から露出させて収納されている。従って筐体左側開閉部25は、ヒンジ部27を介して回転して、開口縁部25Aを筐体左側回動部23の左側縁部23Aに当接させて閉じた場合、左スピーカ29の振動板を外部から隠すことができる。また筐体左側開閉部25は、ヒンジ部27を介して回転して、開口縁部25Aを筐体左側回動部23の左側縁部23Aから離間させるように開いた場合、左スピーカ29の振動板の正面を外部に露出させ得るようになされている。
【0019】
また図6に示すように、筐体右側回動部22は、筐体左側回動部23とは独立して回動し得るようになされている。そして筐体右側回動部22は、筐体右側開閉部24の開閉動作からも独立して回動し得るようになされている。また筐体左側回動部23も、筐体左側開閉部25の開閉動作とは独立して回動し得るようになされている。
【0020】
これに加えて図3(A)及び(B)並びに図4に示すように、筐体中央部21の右側端部には、当該筐体中央部21の最大外径よりも大きい所定外径を有する円環形状の右側車輪30が水平回動軸線L1を中心にして軸回り一方向D1及び軸回り他方向に回動可能に枢支されている。また筐体中央部21の左側端部には、右側車輪30と同様形状及び同様外形の左側車輪31が水平回動軸線L1を中心にして軸回り一方向D1及び軸回り他方向に回動可能に枢支されている。かかる右側車輪30は、左側車輪31と共に回転して楕円体状筐体20を自走させるためのものであり、当該左側車輪31とは独立して回動し得るようになされている。
【0021】
そして筐体中央部21内には、内壁所定位置にバッテリ等でなる重り32が固定されている。また筐体中央部21は、楕円体状筐体20の中心点P1から右側端部(すなわち、右側車輪30)までの距離と、当該楕円体状筐体20の中心点P1から左側端部(すなわち、左側車輪31)までの距離とがほぼ等しい所定距離に選定されている。さらに筐体右側回動部22及び筐体左側回動部23は、互いに同じ形状でなり、互いの幅がほぼ等しい所定幅に選定されている。さらに筐体右側開閉部24及び筐体左側開閉部25も、互いに同じ形状でなり、それぞれ開口縁部24A及び25Aから表面の頂点P2及びP3までの幅がほぼ等しい所定幅に選定されている。すなわち楕円体状筐体20は、当該楕円体状筐体20の中心P1を通り、水平回動軸線L1を垂線とする仮想平面(図示せず)に対し左右が面対称に形成されている。
【0022】
このため楕円体状筐体20は、机の天板や床等(以下、これらをまとめて床と呼ぶ)に載上される場合、筐体中央部21の最大外形部分の外周面を当該床の表面から僅かに離間させ、かつ水平回動軸線L1を床の表面と平行にした姿勢で右側車輪30及び左側車輪31により支持される。これに加えて楕円体状筐体20は、筐体中央部21内の重り32により当該筐体中央部21の重心が中心点P1から内壁寄りにずれているため、床に載上された場合、当該重り32を鉛直下側に位置させた(すなわち、重り32部分でなる重心を床の表面に極力近づけた)姿勢(以下、これを基準姿勢と呼ぶ)となる。
【0023】
そして筐体中央部21内の重り32は、重さが比較的重く選定されている。従って楕円体状筐体20は、右側車輪30及び左側車輪31によって支持された状態で床に載上された場合、筐体右側開閉部24及び筐体左側開閉部25がそれぞれ独立して任意の角度に開かれても、右側及び左側等に傾くことなく基準姿勢を維持することができる。また楕円体状筐体20は、筐体右側開閉部24及び筐体左側開閉部25がそれぞれ独立して開かれた状態で筐体右側回動部22及び筐体左側回動部23がそれぞれ独立して回転しても、右側及び左側等に傾くことなく基準姿勢を維持することができる。
【0024】
これに加えて楕円体状筐体20は、床の上を右側車輪30及び左側車輪31の回転により自走する場合も、筐体中央部21内の重り32により当該筐体中央部21の重心が中心点P1から内壁寄りにずれているため、当該筐体中央部21が水平回動軸線L1を中心にして軸回り一方向D1及び軸回り他方向に回転することを抑制し得るようになされている。さらに楕円体状筐体20は、重り32が比較的重いため、自走する際に筐体右側開閉部24及び筐体左側開閉部25がそれぞれ独立して任意の角度に開かれても、右側及び左側等にほとんど傾くことなく基準姿勢をほぼ維持することができる。また楕円体状筐体20は、自走する際に筐体右側開閉部24及び筐体左側開閉部25がそれぞれ独立して開かれた状態で筐体右側回動部22及び筐体左側回動部23がそれぞれ独立して回転しても、右側及び左側等にほとんど傾くことなく基準姿勢をほぼ維持することができる。
【0025】
ところで筐体中央部21の表面には、基準姿勢で上側となる位置に、指や手等が接触したことを検知するための接触検知センサ33が設けられている。かかる接触検知センサ33は、例えば、筐体中央部21の表面における指先大の領域に接触した指や手等を検知するようになされている。また右側車輪30の右側には、光を発する環状の右側発光部34が設けられている。さらに左側車輪31の左側にも、右側発光部34と同様構成の光を発する環状の左側発光部35が設けられている。そして右側発光部34及び左側発光部35は、それぞれ全体や一部分、また発光色等のように発光状態を可変して発光し得るようになされている。
【0026】
次いで図7を用いて、パーソナルコンピュータ12の回路構成について説明する。かかるパーソナルコンピュータ12は、例えばマイクロコンピュータ構成の制御部40が、キーボードやマウス等でなる入力部41に対するユーザ操作に応じて種々の命令が入力されると、当該制御部40の内部メモリ(図示せず)、又はハードディスクドライブでなる記憶部42に予め記憶されている基本プログラムやアプリケーションプログラム等の各種プログラムを読み出す。そして制御部40は、これら各種プログラムに従って全体を制御すると共に、所定の演算処理や、入力部41を介して入力される種々の命令に応じた各種処理を実行する。
【0027】
これにより制御部40は、ユーザにより入力部41を介して、CD(Compact Disc)等のメディアに記録された音楽データを録音するための操作命令が入力されると、パーソナルコンピュータ12に装填されたメディアから音楽データを読み出すと共に、当該読み出した音楽データを圧縮符号化することにより圧縮音楽データを生成し、これを記憶部42に送出して記憶する。因みに制御部40は、この際、ネットワーク通信処理部43を介してネットワーク上の属性情報提供サーバ(図示せず)にアクセスし、メディアに記録されている音楽データのデータ属性情報を取得する。これにより制御部40は、記憶部42に対し、そのデータ属性情報を圧縮音楽データに対応付けて記憶している。なおデータ属性情報は、例えば音楽データ固有のデータ識別情報や、その音楽データに基づく音楽のタイトル、アーティスト、ジャンル等の種々の情報を含んでいる。
【0028】
また制御部40は、ユーザにより入力部41を介して、所望の音楽データを配信要求するための操作命令が入力されると、これに応じてネットワーク通信処理部43を介してネットワーク上の音楽提供サーバ(図示せず)にアクセスし所望の音楽データをダウンロード要求する。その結果、制御部40は、音楽提供サーバから返信される、圧縮音楽データ(すなわち、所望の音楽データが圧縮符号化されて生成されているものである)と、対応するデータ属性情報とを、ネットワーク通信処理部43を介して受信する。そして制御部40は、記憶部42に対し、かかる圧縮音楽データをデータ属性情報と対応付けて記憶する。このようにして制御部40は、記憶部42に対し、多数の圧縮音楽データを記憶し得るようになされている。
【0029】
そして制御部40は、ユーザにより入力部41を介して記憶部42内の圧縮音楽データが指定され、かつ当該指定された圧縮音楽データを再生するように要求する操作命令が入力されると、これに応じて記憶部42から、当該指定された圧縮音楽データを読み出す。また制御部42は、その記憶部42から読み出した圧縮音楽データに対し復号等の再生処理を施して元の音楽データを生成し、これをデジタルアナログ変換器やアンプ、スピーカ等でなる出力部44に送出する。これにより制御部40は、出力部44から、記憶部42に記憶していた圧縮音楽データに基づく音楽を出力してユーザに聴かせることができる。
【0030】
さらに記憶部42は、ユーザにより入力部41を介してメディアから音楽データを再生するように要求する操作命令が入力されると、パーソナルコンピュータ12に装填されたメディアから音楽データを読み出して出力部44に送出する。これにより制御部40は、出力部44から、メディアに記録された音楽データに基づく音楽を出力してユーザに聴かせることもできる。
【0031】
さらに制御部40は、各種プログラムの実行結果(例えば、音楽データの取得、録音及び再生等)に応じた表示用データを生成して、表示制御部やディスプレイでなる表示部45に送出する。これにより制御部40は、表示部45において表示用データに基づき、音楽データの取得、録音及び再生等に関する各種画面を表示して、ユーザに視認させることができる。
【0032】
かかる構成に加えて制御部40は、通信部46を介して音楽ロボット装置11と無線通信し得るようになされている。そして制御部40は、ユーザにより入力部41を介して、音楽ロボット装置11に記憶保持させる圧縮音楽データが指定され、かつ当該指定された圧縮音楽データを音楽ロボット装置11へ送信するように要求する操作命令が入力されると、記憶部42から、その指定された圧縮音楽データと対応するデータ属性情報とを読み出す。そして制御部40は、このとき記憶部42から読み出した圧縮音楽データとデータ属性情報とをそのまま通信部46を介して音楽ロボット装置11に送信する。これにより制御部40は、音楽ロボット装置11に対し圧縮音楽データ及びデータ属性情報を供給して記憶保持させることができる。
【0033】
また制御部40は、ユーザにより入力部41を介して圧縮音楽データが指定され、かつ当該指定された圧縮音楽データを音楽ロボット装置11で再生するように要求する操作命令が入力されると、記憶部42から、その指定された圧縮音楽データを読み出す。このとき制御部40は、ユーザ設定等に応じて、記憶部42から圧縮音楽データを読み出しながら、そのままストリーミング方式で通信部46を介して音楽ロボット装置11に送信し、又は記憶部42から読み出している圧縮音楽データを再生処理しながら、その結果得られる元の音楽データとしてストリーミング方式で通信部46を介して音楽ロボット装置11に送信する。このようにして制御部40は、記憶部42に記憶保持している圧縮音楽データをそのまま又は元の音楽データとして音楽ロボット装置11に供給し得るようになされている。
【0034】
ところで制御部40は、記憶部42に対し、音楽ロボット装置11に設けられた可動部としての筐体右側回動部22、筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30及び左側車輪31それぞれを予め選定された数秒のような所定時間(以下、これを動き実行時間と呼ぶ)に、所望の動きパターン(以下、これを可動部動きパターンと呼ぶ)で動かすための動きパターンデータを記憶している。この動きパターンデータは、筐体右側回動部22、筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30、左側車輪31毎に複数種類用意されている。
【0035】
そして筐体右側回動部22に対応する複数種類の動きパターンデータは、それぞれ1つの可動部動きパターンに応じた当該筐体右側回動部22の動きの開始から終了までの回転方向や回転角度、回転速度、回転方向の反転等を、動き実行時間の時間軸に沿って示すように生成されている。また筐体左側回動部23に対応する複数種類の動きパターンデータも同様に、それぞれ1つの可動部動きパターンに応じた当該筐体左側回動部23の動きの開始から終了までの回転方向や回転角度、回転速度、回転方向の反転等を、動き実行時間の時間軸に沿って示すように生成されている。因みに筐体右側回動部22や筐体左側回動部23に対応する可動部動きパターンとしては、例えば比較的遅く所定方向へ回転するように動く可動部動きパターンや、比較的速く所定方向へ回転するように動く可動部動きパターン、回転方向をすばやく何度も反転させるように動く可動部動きパターン等がある。
【0036】
さらに筐体右側開閉部24に対応する複数種類の動きパターンデータは、それぞれ1つの可動部動きパターンに応じた当該筐体右側開閉部24の動きの開始から終了までの開閉方向や開閉角度、開閉速度、開閉回数等を、動き実行時間の時間軸に沿って示すように生成されている。また筐体左側開閉部25に対応する複数種類の動きパターンデータも同様に、それぞれ1つの可動部動きパターンに応じた当該筐体左側開閉部25の動きの開始から終了までの開閉方向や開閉角度、開閉速度、開閉回数等を、動き実行時間の時間軸に沿って示すように生成されている。因みに筐体右側開閉部24や筐体左側開閉部25に対応する可動部動きパターンとしては、例えば比較的遅く開く又は閉じるように動く可動部動きパターンや、比較的速く開く又は閉じるように動く可動部動きパターン、開閉方向をすばやく何度も反転させるように動く可動部動きパターン等がある。
【0037】
さらに右側車輪30に対応する複数種類の動きパターンデータは、それぞれ1つの可動部動きパターンに応じた当該右側車輪30の動きの開始から終了までの回転方向や回転角度、回転速度、回転数等を、動き実行時間の時間軸に沿って示すように生成されている。また左側車輪31に対応する複数種類の動きパターンデータも同様に、それぞれ1つの可動部動きパターンに応じた当該左側車輪31の動きの開始から終了までの回転方向や回転角度、回転速度、回転数等を、動き実行時間の時間軸に沿って示すように生成されている。因みに右側車輪30や左側車輪31に対応する可動部動きパターンとしては、例えば比較的遅く所定方向へ回転するように動く可動部動きパターンや、比較的速く所定方向へ回転するように動く可動部動きパターン、回転方向をすばやく何度も反転させるように動く可動部動きパターン等がある。
【0038】
実際に制御部40は、図8に示すように記憶部42において動きパターンデータ管理用のデータベース(以下、これを動きパターンデータベースと呼ぶ)MDBを構築している。そして制御部40は、筐体右側回動部22、筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30、左側車輪31毎の複数種類の動きパターンデータを、テンポの速い音楽やテンポの遅い音楽、朝の時間帯に合う音楽等のように音楽の種々の特徴に応じて分類して(すなわち、音楽のテンポのような種々の特徴それぞれに合う可動部動きパターン同士をまとめるようにして)動きパターンデータベースMDBに登録している。
【0039】
また制御部40は、音楽ロボット装置11に設けられた発光部としての右側発光部34や左側発光部35それぞれを動き実行時間に、所望の発光パターンで発光させるための複数種類の発光パターンデータも、音楽のテンポのような種々の特徴に応じて分類して(すなわち、音楽のテンポのような種々の特徴それぞれに合う発光パターン同士をまとめるようにして)動きパターンデータベースMDBに登録している。
【0040】
因みに右側発光部34に対応する複数種類の発光パターンデータは、それぞれ1つの発光パターンに応じた当該右側発光部34の発光の開始から終了までの発光状態の変化を動き実行時間の時間軸に沿って示すように生成されている。また左側発光部35に対応する複数種類の発光パターンデータも同様に、それぞれ1つの発光パターンに応じた当該左側発光部35の発光の開始から終了までの発光状態の変化を動き実行時間の時間軸に沿って示すように生成されている。そして右側発光部34や左側発光部35に対応する発光パターンとしては、例えば環全体を1つの発光色で所定時間継続して発光させる発光パターンや、環全体を順次発光色を切り替えて発光させる発光パターン、環を部分的に発光させる発光パターン等がある。
【0041】
そして制御部40は、例えばユーザにより入力部41を介して圧縮音楽データが指定され、かつ当該指定された圧縮音楽データに基づく音楽に合わせて音楽ロボット装置11全体を動かす動きデータ(以下、これをロボット動きデータと呼ぶ)を生成するように要求する操作命令が入力されると、動きデータ生成処理を実行する。これにより制御部40は、かかる動きパターンデータや発光パターンデータを用いてロボット動きデータを生成し得るようになされている。実際に制御部40は、動きデータ生成処理を実行する場合、その動きデータ生成処理と同時並行に、このとき記憶部42から読み出した圧縮音楽データを再生処理しながら、その結果得られる元の音楽データを分析する分析処理も実行している。そして制御部40は、かかる分析処理としては、音楽データにおいて音楽のビートに相当する位置(以下、これをビート位置と呼ぶ)を検出するビート検出処理と、当該音楽の特徴を解析する特徴解析処理とを同時並行で実行している。
【0042】
制御部40は、ロボット動きデータを生成する場合、ビート検出処理において、音楽データの順次(すなわち、音楽データの先頭から後尾にかけて)所定の単位処理部分(例えば、1秒分の音楽に相当する部分)から所定周波数帯域毎のエネルギーを抽出しながら、当該単位処理部分毎に各周波数帯域のエネルギーの総和を求める。また制御部40は、単位処理部分毎のエネルギーの総和をもとに、音楽の時間軸に沿ってエネルギーの総和が著しく大きい位置を当該音楽のビートに相当するビート位置として順次検出する。そして制御部40は、音楽データをその先頭から後尾に渡り、所定数毎のビート位置を区切り位置とした例えば音楽の2/1小節や1小節、2小節に相当するような所定の区間(以下、これを曲調区間と呼ぶ)に順次区切るようにする。
【0043】
また制御部40は、特徴解析処理において、音楽データの順次(すなわち、音楽データの先頭から後尾にかけて)単位処理部分から1オクターブの12音階それぞれに相当する周波数帯域毎のエネルギーを抽出しながら、音楽データの曲調区間毎にこれら周波数帯域毎のエネルギーをもとにして、音楽の演奏に利用されている楽器やコード等の種々の情報(以下、これを区間情報と呼ぶ)を検出する。さらに制御部40は、かかる音楽データの曲調区間毎に、その検出した区間情報をもとに音楽の特徴(以下、これを区間特徴と呼ぶ)を検出する。
【0044】
さらに制御部40は、ビート検出処理及び特徴解析処理により音楽データを曲調区間に区切り、その曲調区間について区間特徴を検出する毎に、動きデータ生成処理において、当該音楽データの曲調区間を再生する間(すなわち、音楽データの曲調区間に相当する音楽の所定区間部分が出力される間)、可動部を動かすための可動部動きパターンや発光部を発光させるための発光パターンを設定する。すなわち図9に示すように、制御部40は、音楽データを曲調区間KB1乃至KB6に区切ると、記憶部42内の動きパターンデータベースMDBから、その曲調区間KB1乃至KB6の区間特徴に対応する例えば筐体右側回動部22の複数種類の動きパターンデータの中の、1つの動きパターンデータを無作為に選択して読み出す。
【0045】
そして制御部40は、音楽データの曲調区間KB1乃至KB6に対し、その読み出した1つの動きパターンデータを割り当てる。すなわち、制御部40は、かかる曲調区間KB1乃至KB6を再生する間、筐体右側回動部22を駆動制御するための動きパターンデータを、このとき記憶部42内の動きパターンデータベースMDBから読み出した1つの動きパターンデータに設定する。これにより制御部40は、音楽データの曲調区間KB1乃至KB6に相当する音楽の所定区間部分が出力されるときの筐体右側回動部22に対する可動部動きパターンを設定する。
【0046】
また制御部40は、同様にして音楽データの曲調区間KB1乃至KB6に対し、区間特徴に基づき筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30、左側車輪31毎の1つの動きパターンデータも選択して割り当てる。すなわち、制御部40は、かかる曲調区間KB1乃至KB6を再生する間、筐体左側回動部23や筐体右側開閉部24、筐体左側開閉部25、右側車輪30、左側車輪31それぞれを駆動制御するための動きパターンデータを、記憶部42内の動きパターンデータベースMDBから読み出した動きパターンデータに設定する。これにより制御部40は、音楽データの曲調区間KB1乃至KB6に相当する音楽の所定区間部分が出力されるときの筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30及び左側車輪31それぞれの可動部動きパターンも設定する。
【0047】
さらに制御部40は、同様にして音楽データの曲調区間KB1乃至KB6に対し、区間特徴に基づき右側発光部34、左側発光部35毎の1つの発光パターンも選択して割り当てる。すなわち、制御部40は、かかる曲調区間KB1乃至KB6を再生する間、右側発光部34や左側発光部35それぞれを制御するための発光パターンデータを、記憶部42内の動きパターンデータベースMDBから読み出した発光パターンデータに設定する。これにより制御部40は、音楽データの曲調区間KB1乃至KB6に相当する音楽の所定区間部分が出力されるときの右側発光部34及び左側発光部35それぞれの発光パターンを設定する。
【0048】
因みに制御部40は、動き実行時間の間、筐体右側回動部22、筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30及び左側車輪31を全く動かさないようにするために、例えば動き実行時間の時間軸に沿って「0」の値を示す動きパターンデータ(以下、これを特に動き停止パターンデータと呼ぶ)も記憶部42に記憶している。また制御部40は、動き実行時間の間、右側発光部34や左側発光部35を全く発光させないようにするために、例えば動き実行時間の時間軸に沿って「0」の値を示す発光パターンデータ(以下、これを特に発光停止パターンデータと呼ぶ)も記憶部42に記憶している。
【0049】
そして制御部40は、特徴解析処理により音楽データの曲調区間KB1乃至KB6に相当する音楽の所定区間部分が間奏に相当する部分であることを検出したとき等には、その曲調区間KB1乃至KB6に対し、筐体右側回動部22や筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30、左側車輪31の何れか又は全ての動きパターンデータとして動き停止パターンデータを割り当てることもできる。また制御部40は、このような場合、音楽データの曲調区間KB1乃至KB6に対し、右側発光部34や左側発光部35の何れか又は全ての発光パターンデータとして発光停止パターンデータを割り当てることもできる。
【0050】
すなわち、制御部40は、音楽データの曲調区間KB1乃至KB6に対応する区間特徴に応じて、当該曲調区間KB1乃至KB6に相当する音楽の所定区間部分が出力されるときに筐体右側回動部22、筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30及び左側車輪31を全く動かさないように設定することができる。また制御部40は、音楽データの曲調区間KB1乃至KB6に対応する区間特徴に応じて、当該曲調区間KB1乃至KB6に相当する音楽の所定区間部分が出力されるときに右側発光部34及び左側発光部35を全く発光させないように設定することもできる。
【0051】
さらに制御部40は、音楽データの複数の曲調区間KB1乃至KB6の中で、区間情報として同一のコードが使用されていることを検出した少なくとも2つの曲調区間KB1乃至KB6に対しては、筐体右側回動部22、筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30及び左側車輪31の少なくとも1つについて同一の動きパターンデータを割り当てるようにしている。さらに制御部40は、区間情報として同一のコードが使用されていることを検出した少なくとも2つの曲調区間KB1乃至KB6に対しては、右側発光部34及び左側発光部35の少なくとも1つについて同一の発光パターンデータを割り当てるようにしている。
【0052】
さらに制御部40は、音楽データの曲調区間KB1乃至KB6に対し動きパターンデータ及び発光パターンデータを割り当てる場合、当該曲調区間KB1乃至KB6に付加されているタイムコードに基づき、その曲調区間KB1乃至KB6が実際に音楽の所定区間部分として出力されるときの再生時間(以下、これを区間再生時間と呼ぶ)を検出する。そして制御部40は、曲調区間KB1乃至KB6の区間再生時間と動き実行時間とを比較する。その結果、制御部40は、区間再生時間と動き実行時間とが一致していると、曲調区間KB1乃至KB6に対し動きパターンデータ及び発光パターンデータをそのまま割り当てる。
【0053】
これに対して制御部40は、区間再生時間が動き実行時間よりも短いと、その動き実行時間を区間再生時間に合わせるように動きパターンデータ及び発光パターンデータを動き実行時間の時間軸に沿って圧縮するように加工して曲調区間KB1乃至KB6に割り当てる。すなわち、制御部40は、このような場合、本来の可動部動きパターンが示す動きを、これよりもすばやい動きの可動部動きパターンに加工し、また本来の発光パターンが示す発光状態を、これよりもすばやく変化する発光状態の発光パターンに加工している。
【0054】
また制御部40は、区間再生時間が動き実行時間よりも長いと、その動き実行時間を区間再生時間に合わせるように動きパターンデータ及び発光パターンデータを動き実行時間の時間軸に沿って伸張するように加工して曲調区間KB1乃至KB6に割り当てる。すなわち、制御部40は、このような場合、本来の可動部動きパターンが示す動きを、これよりもゆっくり動く可動部動きパターンに加工し、また本来の発光パターンが示す発光の変化を、これよりもゆっくり変化する発光パターンに加工している。因みに制御部40は、動き停止パターンデータや発光停止パターンデータについても、同様に音楽データの曲調区間KB1乃至KB6に対し適宜加工して割り当てている。
【0055】
従って制御部40は、音楽データの先頭から後尾の全ての曲調区間KB1乃至KB6に対し、それぞれ動きパターンデータや動き停止パターンデータ、発光パターンデータや発光停止パターンデータを時間的に間を空けることなく連続的に割り当てている。そして制御部40は、音楽データの先頭から後尾までの全ての曲調区間KB1乃至KB6に対しそれぞれ動きパターンデータや動き停止パターンデータ、発光パターンデータや発光停止パターンデータを割り当てると、当該全ての曲調区間KB1乃至KB6に割り当てて音楽の再生時間軸に沿って並ぶ、例えば筐体右側回動部22の動きパターンデータや動き停止パターンデータのデータ列を当該筐体右側回動部22に対する動きデータとする。このようにして制御部40は、1つの音楽データに基づく音楽が出力されている間、筐体右側回動部22を動かすための動きデータを得る。
【0056】
また制御部40は、同様にして、音楽データの全ての曲調区間KB1乃至KB6に割り当てて音楽の再生時間軸に沿って並ぶ、筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30及び左側車輪31それぞれの動きパターンデータや動き停止パターンデータのデータ列も、当該筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30及び左側車輪31の動きデータとする。このようにして制御部40は、1つの音楽データに基づく音楽が出力されている間、筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30及び左側車輪31それぞれを動かすための動きデータを得る。
【0057】
さらに制御部40は、同様にして、音楽データの全ての曲調区間KB1乃至KB6に割り当てて音楽の再生時間軸に沿って並ぶ、右側発光部34及び左側発光部35それぞれの発光パターンデータや発光停止パターンデータのデータ列を当該右側発光部34及び左側発光部35の発光データとする。これにより制御部40は、1つの音楽データに基づく音楽が出力されている間、右側発光部34及び左側発光部35それぞれを発光させるための発光データを得る。そして制御部40は、これら筐体右側回動部22、筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30、左側車輪31毎の動きデータと、右側発光部34、左側発光部35毎の発光データとをまとめて、1つ音楽データに基づく音楽に合わせて音楽ロボット装置11全体を動かすロボット動きデータとする。
【0058】
このようにして制御部40は、圧縮音楽データに対応するロボット動きデータを生成し得るようになされている。ところで制御部40は、例えばユーザにより入力部41を介して、単に圧縮音楽データが指定され、当該指定された圧縮音楽データを用いてロボット動きデータを生成するように要求する操作命令が入力されたときには、これに応じて生成したロボット動きデータを、記憶部42に対し圧縮音楽データに対応付けて記憶することができる。
【0059】
また制御部40は、音楽ロボット装置11に対し圧縮音楽データや音楽データのみを供給することもできる。しかしながら制御部40は、例えばユーザにより入力部41を介して、音楽ロボット装置11に再生させる音楽の圧縮音楽データが指定され、かつ当該指定された圧縮音楽データを用いてロボット動きデータを生成するように要求する要求命令が入力されたときには、記憶部42から指定された圧縮音楽データを読み出す。そして制御部40は、記憶部42から読み出している圧縮音楽データを再生処理しながら、その結果得られる音楽データを用いてロボット動きデータを生成する。
【0060】
この際、制御部40は、例えば音楽データを用いてロボット動きデータをその先頭から途中の所定部分まで生成すると、当該途中まで生成したロボット動きデータを先頭から所定単位毎に分割して通信部46から音楽ロボット装置11へ送信し始める。因みに制御部40は、ロボット動きデータを所定部分まで生成して音楽ロボット装置11への送信を開始すると、引き続きロボット動きデータの残りの部分を生成しながら、音楽ロボット装置11への送信を継続する。
【0061】
そして制御部40は、すでに音楽ロボット装置11に対しロボット動きデータの送信を開始している状態で、ユーザにより入力部41を介して音楽ロボット装置11へ圧縮音楽データを送信するように要求する操作命令が入力されると、これに応じて記憶部42から読み出している圧縮音楽データをそのまま又は再生処理して元の音楽データとしてストリーミング方式で通信部46を介して音楽ロボット装置11へ送信する。
【0062】
このようにして制御部40は、音楽ロボット装置11に対し圧縮音楽データや音楽データと共にロボット動きデータも供給し得るようになされている。因みに制御部40は、音楽ロボット装置11へロボット動きデータの先頭の所定単位部分を送信すると、その後は、音楽ロボット装置11から残りの所定単位部分が要求される毎に、これに応じてロボット動きデータを順次所定単位部分に分割して送信している。従って制御部40は、音楽ロボット装置11に対し圧縮音楽データや音楽データと共にロボット動きデータを供給する場合、通信負荷が増大することを回避している。
【0063】
さらに制御部40は、音楽ロボット装置11から再生する圧縮音楽データが通知され、その圧縮音楽データに対応するロボット動きデータが要求されると、これに応じて当該指示された圧縮音楽データを用いて上述と同様にロボット動きデータを生成する。そして制御部40は、かかるロボット動きデータを上述と同様に所定単位部分毎に通信部46を介して音楽ロボット装置11に送信することもできる。このようにして制御部40は、音楽ロボット装置11に対しロボット動きデータのみも供給し得るようになされている。
【0064】
因みに制御部40は、音楽ロボット装置11に送信するためにロボット動きデータを生成すると、例えばユーザ設定に応じて、記憶部42に対し当該ロボット動きデータを圧縮音楽データと対応付けて記憶することができる。また制御部40は、この際、例えばユーザ設定に応じて、ロボット動きデータを、音楽ロボット装置11に送信し終えた時点で破棄することもできる。そして制御部40は、記憶部42にロボット動きデータを記憶していると、音楽ロボット装置11に対し、そのロボット動きデータを供給するとき、改めてロボット動きデータを生成しなくても、記憶部42からそのロボット動きデータを読み出して通信部46から音楽ロボット装置11に送信することもできる。
【0065】
次いで図10を用いて、音楽ロボット装置11の回路構成について説明する。かかる音楽ロボット装置11は、当該音楽ロボット装置11全体を統括的に制御する、マイクロコンピュータ構成の主制御部50を有している。また音楽ロボット装置11は、可動部51としての筐体右側回動部22、筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30及び左側車輪31を駆動制御し、発光部52としての右側発光部34及び左側発光部35を制御する、マイクロコンピュータ構成の駆動制御部53も有している。さらに音楽ロボット装置11は、入力部54として、上述した接触検知センサ33と共に、楕円体状筐体20に生じる加速度を検出する加速度センサも有している。
【0066】
この場合、入力部54は、接触検知センサ33に対しユーザの指等が接触すると、当該指等が接触している間だけ接触検知信号を駆動制御部53に送出している。そして駆動制御部53は、入力部54から(実際には、接触検知センサ33から)接触検知信号が与えられると、その接触検知信号に応じて、接触検知センサ33に対する指等の接触状態(例えば、指先で軽くたたくような単独の接触や2回以上の連続的な接触、また指等が接触したままの状態等)を判別している。
【0067】
また入力部54は、加速度センサにより常時、楕円体状筐体20に生じる加速度を検出し、その検出結果を加速度検出信号として駆動制御部53に送出している。そして駆動制御部53は、入力部54から(実際には、加速度センサから)加速度検出信号が与えられると、その加速度検出信号に基づいて、楕円体状筐体20の状態(床の上に置かれて静止している状態やユーザにより手で持たれて所定方向へ振り動かされている状態等)も判別している。
【0068】
このようにして駆動制御部53は、入力部54から接触検知信号や加速度検出信号が入力されると、そのときの接触検知センサに対する指等の接触状態と楕円体状筐体20の状態との組み合せに応じて、ユーザによる音楽ロボット装置11への命令の入力の有無を判別すると共に、命令が入力されたときには、その命令の種類を判別している。そして駆動制御部53は、ユーザにより命令が入力されると、どのような命令が入力されたかを主制御部50へ通知している。因みに音楽ロボット装置11は、接触検知センサ33に対する指等の接触状態と楕円体状筐体20の状態との組み合せにより、圧縮音楽データの再生開始命令や、再生する圧縮音楽データの選択命令、パーソナルコンピュータ12に対しロボット動きデータを要求する要求命令等の種々の命令を入力させ得るようになされている。
【0069】
主制御部50は、駆動制御部53から種々の命令の入力が通知されると、内部メモリ又は記憶部55に予め記憶している基本プログラムやアプリケーションプログラム、音楽出力プログラム等の各種プログラムに従って各種処理を実行する。また主制御部50は、通信部56を介してパーソナルコンピュータ12と無線通信することで、当該パーソナルコンピュータ12を主体とし自己を従属的に機能させるようにして各種処理を実行し得るようにもなされている。
【0070】
これにより主制御部50は、パーソナルコンピュータ12から、記憶保持用の圧縮音楽データと、対応するデータ属性情報とが送信され、その圧縮音楽データとデータ属性情報とを通信部56によって受信すると、かかる圧縮音楽データとデータ属性情報とを対応付けて記憶部55に記憶する。ただし記憶部55は、記憶容量が比較的小さいことにより、パーソナルコンピュータ12の記憶部42に比べて、記憶可能な圧縮音楽データの数が格段的に少ない。
【0071】
また主制御部50は、記憶部55に対し、図8について上述した動きパターンデータベースMDBと同一のもの、又はその動きパターンデータベースMDBに登録している動きパターンデータや発光パターンデータを、音楽の特徴に応じた分類毎に少しずつ減らした動きパターンデータベースを記憶している。
【0072】
そして主制御部50は、例えば音楽ロボット装置11が床の上に置かれた状態で、ユーザにより記憶部55内の圧縮音楽データを再生するように命令されると、当該記憶部55から圧縮音楽データを読み出して再生処理しながら、その結果得られる元の音楽データを、デジタルアナログ変換器やアンプ、右スピーカ28及び左スピーカ29等でなる出力部57に送出する。これにより主制御部50は、音楽データに基づく音楽を右スピーカ28及び左スピーカ29から出力してユーザに聴かせることができる。
【0073】
ところで主制御部50は、このように音楽ロボット装置11が床の上に置かれた状態で、記憶部55から圧縮音楽データを読み出して再生処理するときには、かかる再生処理と並行して、当該圧縮音楽データを再生処理しながら得られる元の音楽データの分析処理と、ロボット動きデータを生成する動きデータ生成処理も実行している。実際に主制御部50は、記憶部55から圧縮音楽データを読み出して再生処理を開始すると、その結果得られる音楽データの分析処理としてビート検出処理と特徴解析処理とを同時並行に実行している。
【0074】
主制御部50は、圧縮音楽データの再生処理を実行している場合、ビート検出処理において、音楽データの所定の単位処理部分毎に音量レベルを検出しながら、当該検出した音量レベルを、予め設定された比較的大きい閾値と比較する。そして主制御部50は、その比較結果に基づき、音楽データにおいて音量レベルが閾値以上の位置を音楽のビートに相当するビート位置として順次検出する。これにより主制御部50は、音楽データをその先頭から後尾に渡り、所定数毎のビート位置を区切り位置とした例えば音楽の2/1小節や1小節、2小節に相当するような曲調区間に順次区切るようにする。また主制御部50は、この際、特徴解析処理において、音楽データの曲調区間毎に複数回検出した音量レベルをもとにして当該曲調区間に対応する区間特徴を検出する。
【0075】
さらに主制御部50は、動きデータ生成処理において、音楽データの先頭から後尾への曲調区間に対し、上述したパーソナルコンピュータ12の場合と同様にして、動きパターンデータや動き停止パターンデータ、発光パターンデータや発光停止パターンデータを割り当てるようにする。すなわち、主制御部50は、音楽データの曲調区間を再生する間、可動部51(すなわち、筐体右側回動部22、筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30及び左側車輪31)を駆動制御するための動きパターンデータを、記憶部55内の動きパターンデータベースから読み出した動きパターンデータに設定する。また主制御部50は、かかる曲調区間を再生する間、発光部52(すなわち、右側発光部34及び左側発光部35)を制御するための発光パターンデータを、記憶部55内の動きパターンデータベースから読み出した発光パターンデータに設定する。
【0076】
そして主制御部50は、音楽データの先頭から後尾にかけて順次1つの曲調区間に対する可動部51及び発光部52の動きパターンデータや動き停止パターンデータ、発光パターンデータや発光停止パターンデータを割り当てる毎に、当該1つの曲調区間に割り当てた動きパターンデータや動き停止パターンデータを、可動部51(すなわち、筐体右側回動部22、筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30、左側車輪31)を音楽の所定区間部分を出力する間に動かす(又は動きを停止させる)ための動きデータとする。また主制御部50は、1つの曲調区間に割り当てた発光パターンデータや発光停止パターンデータを、発光部52(すなわち、右側発光部34、左側発光部35)を音楽の所定区間部分を出力する間に発光させる(又は発光を停止させる)ための発光データとする。
【0077】
さらに主制御部50は、音楽データの1つの曲調区間に割り当てた全ての動きデータ及び発光データをまとめて、当該1つの曲調区間に相当する音楽の所定区間部分を出力する間に音楽ロボット装置11全体を動かすためのロボット動きデータとする。このようにして主制御部50は、音楽データの順次1つの曲調区間に対応するロボット動きデータを生成し、かかるロボット動きデータを音楽の再生時間軸に沿った並びを維持して駆動制御部53に送出する。
【0078】
これにより駆動制御部53は、主制御部50から与えられたロボット動きデータに含まれる筐体右側回動部22、筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30及び左側車輪31それぞれの動きデータに基づいて、対応する筐体右側回動部22、筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30及び左側車輪31を駆動制御する。また駆動制御部53は、かかるロボット動きデータに含まれる右側発光部34及び左側発光部35それぞれの発光データに基づいて、対応する右側発光部34及び左側発光部35を制御する。
【0079】
このようにして駆動制御部53は、音楽データの順次1つの曲調区間に相当する音楽の所定区間部分が出力される間、動きデータに基づいて筐体右側回動部22、筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30及び左側車輪31をそれぞれ所望の可動部動きパターンで動かし又は動きを停止させる。また駆動制御部53は、音楽データの順次1つの曲調区間に相当する音楽の所定区間部分が出力される間、発光データに基づいて右側発光部34及び左側発光部35をそれぞれ所望の発光パターンで発光させ又は発光を停止させる。
【0080】
ところで主制御部50は、音楽データに対する分析処理としてビート検出処理及び特徴解析処理を実行する場合、上述したパーソナルコンピュータ12のように音楽データに対し複雑な処理を何ら施すことなく、音楽データの音量レベルを検出するような簡易な処理によりビート位置を検出し、また区間特徴を検出している。従って主制御部50は、パーソナルコンピュータ12に比べて、ロボット動きデータを、処理負荷の増加を抑えてかつ比較的短時間に生成している。
【0081】
しかしながら主制御部50は、記憶部55から読み出した圧縮音楽データを再生処理して出力部57へ送出する音楽データを生成している。そして主制御部50は、その再生処理により得た音楽データをさらに用いて分析処理と共に動きデータ生成処理を実行することで駆動制御部53へ送出するロボット動きデータを生成している。すなわち、主制御部50は、記憶部55から圧縮音楽データを読み出したとき、出力部57へ送出する音楽データの先頭部分を得た時点から、僅かながら時間的に遅れて、駆動制御部53へ送出する先頭のロボット動きデータを得ている。
【0082】
従って主制御部50は、記憶部55から読み出している圧縮音楽データを再生処理しながら、その結果得られる音楽データを一旦、内部のバッファ(以下、これを単にバッファと呼ぶ)に一時記憶している。これにより主制御部50は、出力部57への音楽データの送出開始を遅延させている。また主制御部50は、音楽データの順次1つの曲調区間に対応するロボット動きデータを生成する毎に、かかるロボット動きデータも一旦、バッファに一時記憶している。従って主制御部50は、出力部57への音楽データの送出開始と共に駆動制御部53へのロボット動きデータの送出開始も遅延させている。
【0083】
そして主制御部50は、出力部57への音楽データの送出開始を予め設定された所定の遅延時間だけ遅延させると共に、当該出力部57への音楽データの送出開始の遅延に合わせて駆動制御部53へのロボット動きデータの送出開始も遅延させている。因みに、かかる遅延時間は、例えばバッファに対する音楽データの一時記憶の開始時点から、バッファに所定個数分の曲調区間に対応するロボット動きデータを一時記憶し得る時点までの所定時間に選定されている。
【0084】
従って主制御部50は、バッファに対する音楽データの一時記憶の開始時点から出力部57への音楽データの送出開始を遅延時間だけ遅延させる。そして主制御部50は、バッファに対する音楽データの一時記憶の開始時点から遅延時間に達したタイミングで当該バッファから音楽データを読み出して出力部57への送出を開始すると共に、そのバッファからロボット動きデータも読み出すようにして駆動制御部53への送出を開始する。このようにして主制御部50は、出力部57(すなわち、右スピーカ28及び左スピーカ29)からの音楽の出力タイミングを制御すると共に、駆動制御部53に対しロボット動きデータに基づく可動部51の駆動制御及び発光部52の制御の開始タイミングも制御する。
【0085】
これにより主制御部50は、出力部57からの音楽の出力開始に同期させて、可動部51の駆動制御と発光部52の制御とを同時に開始させている。従って主制御部50は、出力部57から1曲の音楽を出力している間、当該音楽の曲調に同期させて可動部51を順次所定の可動部動きパターンで動かし、また発光部52を順次所定の発光パターンで発光させ得るようになされている。かくして主制御部50は、記憶部55に圧縮音楽データとして記憶していた音楽をユーザに聴かせながら、その音楽に合わせて、あたかも音楽ロボット装置11全体を踊っているかのように動かしてユーザに見せることができる。
【0086】
ところで主制御部50は、例えば音楽ロボット装置11がユーザにより手で持たれた状態で、記憶部55内の圧縮音楽データを再生するように命令されたときには、ロボット動きデータを特には生成せずに、その圧縮音楽データを再生処理し、その結果得られる音楽データを出力部57に送出する。これにより主制御部50は、この際、可動部51を特には動かさずに、ユーザに対し手に音楽ロボット装置11を安定して保持させながら、右スピーカ28及び左スピーカ29から音楽を出力してユーザに聴かせることができる。
【0087】
また主制御部50は、このように音楽ロボット装置11がユーザにより手で持たれた状態で、再生する圧縮音楽データを切り替えるように命令されると、これに応じて再生する圧縮音楽データを切り替えることによりユーザに聴かせる音楽を切り替える。これにより主制御部50は、ユーザに対し所望の音楽を選択させることができる。
【0088】
そして主制御部50は、例えば音楽ロボット装置11が再び床の上に置かれた状態で、ユーザによりパーソナルコンピュータ12からロボット動きデータを取得するように命令されると、その直前にユーザにより選択されていた音楽の圧縮音楽データに対応するデータ識別情報(すなわち、圧縮音楽データに対応するデータ属性情報に含まれている)を記憶部55から読み出す。これにより主制御部50は、そのデータ識別情報(すなわち、再生する圧縮音楽データを通知するためのものである)と共に、ロボット動きデータを要求する動きデータ要求情報を通信部56からパーソナルコンピュータ12に送信する。
【0089】
その結果、主制御部50は、パーソナルコンピュータ12からデータ識別情報で識別された圧縮音楽データ(すなわち、ユーザにより選択された音楽の圧縮音楽データ)に対応するロボット動きデータ(この場合、音楽データ全体に対応するロボット動きデータである)の所定単位部分が送信されると、そのロボット動きデータの所定単位部分を、通信部56により受信してバッファに一時記憶する。この状態で主制御部50は、記憶部55からユーザにより選択された圧縮音楽データを読み出して再生処理を開始する。そして主制御部50は、記憶部55から読み出している圧縮音楽データを再生処理しながら音楽データを得ると、このときには当該音楽データを特に遅延はさせずに出力部57へ送出する。また主制御部50は、出力部57への音楽データの送出を開始したタイミングでバッファからロボット動きデータの所定単位部分を読み出すようにして駆動制御部53への送出を開始する。
【0090】
このようにして主制御部50は、パーソナルコンピュータ12からロボット動きデータを取得したときにも、出力部57からの音楽の出力タイミングを制御すると共に、駆動制御部53に対しロボット動きデータに基づく可動部51の駆動制御及び発光部52の制御の開始タイミングも制御する。これにより主制御部50は、出力部57からの音楽の出力開始に同期させて、駆動制御部53に対し可動部51の駆動制御及び発光部52の制御を開始させている。
【0091】
ところで主制御部50は、バッファに一時記憶していたロボット動きデータの所定単位部分をある程度、駆動制御部53へ送出し終えると、通信部56を介してパーソナルコンピュータ12に対し、ロボット動きデータの次の所定単位部分を要求する。そして主制御部50は、かかる要求に応じてパーソナルコンピュータ12からロボット動きデータの次の所定単位部分が送信されると、これを通信部56により受信してバッファに一時記憶する。
【0092】
これにより主制御部50は、バッファからロボット動きデータの先に取得していた所定単位部分を全て読み出して駆動制御部53へ送出し終えると、引き続きバッファからロボット動きデータの次に取得した所定単位部分を読み出し始めて駆動制御部53へ送出する。このようにして主制御部50は、音楽の出力時にパーソナルコンピュータ12から供給されるロボット動きデータを利用するときには、バッファに一時記憶しているロボット動きデータの所定単位部分をある程度、駆動制御部53へ送出し終える毎に、パーソナルコンピュータ12からロボット動きデータの次の所定単位部分を取得する。従って主制御部50は、圧縮音楽データを再生処理しながら出力部57から音楽を出力している間は、駆動制御部53に対しロボット動きデータをとぎれることなく送出して可動部51を連続的に駆動制御させると共に発光部52も連続的に制御させ、かくして音楽ロボット装置11全体をあたかも音楽に合わせて踊っているかのように動かすことができる。
【0093】
さらに主制御部50は、パーソナルコンピュータ12から圧縮音楽データのみが供給される場合、当該パーソナルコンピュータ12から圧縮音楽データがストリーミング方式で送信されると、通信部56により、その圧縮音楽データの受信を開始する。そして主制御部50は、通信部56により受信されている圧縮音楽データを再生処理しながら、その結果得られる音楽データを一旦、バッファに一時記憶する。また主制御部50は、このとき圧縮音楽データを再生処理して得られる音楽データを用いて上述と同様に分析処理及び動きデータ生成処理を実行する。これにより主制御部50は、音楽データの順次1つの曲調区間に対応するロボット動きデータを生成し、当該生成したロボット動きデータも一旦、バッファに一時記憶する。
【0094】
この際にも、主制御部50は、上述したように記憶部55から圧縮音楽データを読み出したときと同様に、バッファに対する音楽データの一時記憶の開始時点から出力部57への音楽データの送出開始を遅延時間だけ遅延させる。そして主制御部50は、バッファに対する音楽データの一時記憶の開始時点から遅延時間に達したタイミングで当該バッファから音楽データを読み出して出力部57への送出を開始すると共に、そのバッファからロボット動きデータも読み出すようにして駆動制御部53への送出を開始する。これにより主制御部50は、出力部57からの音楽の出力開始に同期させて、可動部51の駆動制御と発光部52の制御とを同時に開始させる。
【0095】
従って主制御部50は、パーソナルコンピュータ12から圧縮音楽データが供給されたときにも、出力部57から1曲の音楽を出力している間、当該音楽の曲調に同期させて可動部51を順次所定の可動部動きパターンで動かし、また発光部52を順次所定の発光パターンで発光させ得るようになされている。これにより主制御部50は、パーソナルコンピュータ12から供給された圧縮音楽データに基づく音楽をユーザに聴かせながら、その音楽に合わせて、あたかも音楽ロボット装置11全体を踊っているかのように動かしてユーザに見せることができる。
【0096】
さらに主制御部50は、パーソナルコンピュータ12から音楽データ(すなわち、圧縮音楽データをすでに再生処理して得られた音楽データ)のみが供給される場合、当該パーソナルコンピュータ12から音楽データがストリーミング方式で送信されると、通信部56により、その音楽データの受信を開始する。そして主制御部50は、通信部56により受信されている音楽データを一旦、バッファに一時記憶する。また主制御部50は、このとき通信部56により受信されている音楽データを用いて上述と同様に分析処理及び動きデータ生成処理を実行する。これにより主制御部50は、音楽データの順次1つの曲調区間に対応するロボット動きデータを生成し、当該生成したロボット動きデータも一旦、バッファに一時記憶する。
【0097】
この際にも、主制御部50は、上述したように記憶部55から圧縮音楽データを読み出したときと同様に、バッファに対する音楽データの一時記憶の開始時点から出力部57への音楽データの送出開始を遅延時間だけ遅延させる。そして主制御部50は、バッファに対する音楽データの一時記憶の開始時点から遅延時間に達したタイミングで当該バッファから音楽データを読み出して出力部57への送出を開始すると共に、そのバッファからロボット動きデータも読み出すようにして駆動制御部53への送出を開始する。これにより主制御部50は、出力部57からの音楽の出力開始に同期させて、可動部51の駆動制御と発光部52の制御とを同時に開始させる。
【0098】
従って主制御部50は、パーソナルコンピュータ12から音楽データが供給されたときにも、出力部57から1曲の音楽を出力している間、当該音楽の曲調に同期させて可動部51を順次所定の可動部動きパターンで動かし、また発光部52を順次所定の発光パターンで発光させ得るようになされている。これにより主制御部50は、パーソナルコンピュータ12から供給された音楽データに基づく音楽をユーザに聴かせながら、その音楽に合わせて、あたかも音楽ロボット装置11全体を踊っているかのように動かしてユーザに見せることができる。
【0099】
さらに主制御部50は、パーソナルコンピュータ12から圧縮音楽データと共にロボット動きデータが供給される場合、まずパーソナルコンピュータ12からロボット動きデータの先頭の所定単位部分が送信されると、そのロボット動きデータの所定単位部分を通信部56により受信してバッファに一時記憶する。また主制御部50は、引き続きパーソナルコンピュータ12から圧縮音楽データがストリーミング方式で送信されると、通信部56によりその圧縮音楽データの受信を開始する。そして主制御部50は、通信部56により受信されている圧縮音楽データを再生処理しながら音楽データを得ると、このときには当該音楽データを特に遅延はさせずに出力部57へ送出する。また主制御部50は、出力部57への音楽データの送出を開始したタイミングでバッファからロボット動きデータの所定単位部分を読み出すようにして駆動制御部53への送出を開始する。
【0100】
このようにして主制御部50は、パーソナルコンピュータ12から圧縮音楽データと共にロボット動きデータが供給されたときにも、出力部57からの音楽の出力タイミングを制御すると共に、駆動制御部53に対しロボット動きデータに基づく可動部51の駆動制御及び発光部52の制御の開始タイミングも制御する。これにより主制御部50は、出力部57からの音楽の出力開始に同期させて、駆動制御部53に対し可動部51の駆動制御及び発光部52の制御を開始させている。
【0101】
因みに主制御部50は、パーソナルコンピュータ12から圧縮音楽データと共にロボット動きデータが供給されたときにも、バッファに一時記憶していたロボット動きデータの所定単位部分をある程度、駆動制御部53へ送出し終える毎に、パーソナルコンピュータ12からロボット動きデータの次の所定単位部分を取得している。従って主制御部50は、圧縮音楽データを再生処理しながら出力部57から音楽を出力している間は、駆動制御部53に対しロボット動きデータをとぎれることなく送出して可動部51を連続的に駆動制御させると共に発光部52も連続的に制御させ、かくして音楽ロボット装置11全体をあたかも音楽に合わせて踊っているかのように動かすことができる。
【0102】
さらに主制御部50は、パーソナルコンピュータ12から音楽データと共にロボット動きデータが供給される場合、まずパーソナルコンピュータ12からロボット動きデータの先頭の所定単位部分が送信されると、そのロボット動きデータの所定単位部分を通信部56により受信してバッファに一時記憶する。また主制御部50は、引き続きパーソナルコンピュータ12から音楽データがストリーミング方式で送信されると、通信部56によりその音楽データを受信しながら、特には遅延させずに出力部57へ送出する。そして主制御部50は、通信部56により受信している音楽データの出力部57への送出を開始したタイミングで、バッファからロボット動きデータの所定単位部分を読み出すようにして駆動制御部53への送出を開始する。
【0103】
このようにして主制御部50は、パーソナルコンピュータ12から音楽データと共にロボット動きデータが供給されたときにも、出力部57からの音楽の出力タイミングを制御すると共に、駆動制御部53に対しロボット動きデータに基づく可動部51の駆動制御及び発光部52の制御の開始タイミングも制御する。これにより主制御部50は、出力部57からの音楽の出力開始に同期させて、駆動制御部53に対し可動部51の駆動制御及び発光部52の制御を開始させている。
【0104】
因みに主制御部50は、パーソナルコンピュータ12から音楽データと共にロボット動きデータが供給されたときにも、バッファに一時記憶していたロボット動きデータの所定単位部分をある程度、駆動制御部53へ送出し終える毎に、パーソナルコンピュータ12からロボット動きデータの次の所定単位部分を取得している。従って主制御部50は、出力部57から音楽データを音楽として出力している間は、駆動制御部53に対しロボット動きデータをとぎれることなく送出して可動部51を連続的に駆動制御させると共に発光部52も連続的に制御させ、かくして音楽ロボット装置11全体をあたかも音楽に合わせて踊っているかのように動かすことができる。
【0105】
なお、この実施の形態の場合、音楽ロボット装置11の主制御部50は、音楽の出力時にロボット動きデータを生成し、又はパーソナルコンピュータ12からロボット動きデータの供給を受けて可動部51を駆動制御し発光部52を制御しても、当該音楽の出力が終了すると、その都度、ロボット動きデータを破棄している。これにより主制御部50は、記憶部55を圧縮音楽データの記憶に対し有効に利用している。
【0106】
次いで、図11乃至図13に示すフローチャートを用いて、主制御部50が記憶部55から圧縮音楽データを読み出したときや、パーソナルコンピュータ12から圧縮音楽データや音楽データが供給されたときに、同時並行で実行する音楽データの分析処理におけるビート検出処理手順RT1及び特徴解析処理手順RT2と、動きデータ生成処理手順RT3について説明する。
【0107】
主制御部50は、圧縮音楽データの再生処理を開始し、またパーソナルコンピュータ12から送信された音楽データの受信を開始すると、音楽出力プログラムに従って図11に示すビート検出処理手順RT1を開始する。主制御部50は、かかるビート検出処理手順RT1を開始すると、ステップSP1において、音楽データの所定の単位処理部分毎に音量レベルを検出し、その検出結果に基づき音楽データのビート位置を検出して、次のステップSP2に移る。ステップSP2において主制御部50は、音楽データに対し所定数のビート位置を検出したか否かを判別する。このステップSP2において否定結果が得られると、このことは音楽データにおいて曲調区間を特定するための所定数のビート位置を未だ検出してはいないことを表している。
【0108】
従って主制御部50は、かかる否定結果を得ると、ステップSP1に戻る。これにより主制御部50は、この後、ステップSP2において肯定結果を得るまでの間、ステップSP1及びステップSP2の処理を循環的に繰り返し実行する。従って主制御部50は、音楽データにおいてその先頭から順次ビート位置を検出する。
【0109】
そしてステップSP2において肯定結果が得られると、このことは音楽データにおいて曲調区間を特定するための所定数のビート位置を検出したことを表している。従って主制御部50は、かかる肯定結果を得ると、ビート位置の検出数を一旦リセットして、音楽データに対する次の曲調区間を検出し得るようにした後、次のステップSP3に移る。ステップSP3において主制御部50は、音楽データ内で所定数のビート位置に基づき1つの曲調区間を区切り、次のステップSP4に移る。ステップSP4において主制御部50は、音楽データ全体に渡る曲調区間の区切りが完了したか否かを判別する。このステップSP4において否定結果が得られると、このことは音楽データの途中までしか曲調区間を区切っていないことを表している。
【0110】
従って主制御部50は、かかる否定結果を得ると、ステップSP1に戻る。これにより主制御部50は、この後、ステップSP4において肯定結果を得るまでの間、ステップSP1乃至ステップSP4の処理を循環的に繰り返し実行する。従って主制御部50は、音楽データをその先頭から順次ビート位置を検出しながら順次曲調区間に区切る。そしてステップSP4において肯定結果が得られると、このことは音楽データを全体に渡り複数の曲調区間に区切ったことを表している。従って主制御部50は、かかる肯定結果を得ると、次のステップSP5に移り、かかるビート検出処理手順RT1を終了する。
【0111】
また主制御部50は、圧縮音楽データの再生処理し、またパーソナルコンピュータ12から送信された音楽データの受信を開始すると、音楽出力プログラムに従って図12に示す特徴解析処理手順RT2を開始する。主制御部50は、かかる特徴解析処理手順RT2を開始すると、ステップSP11において、ビート検出処理により音楽データ内で1つの曲調区間を区切ることを待ち受ける。そして主制御部50は、ビート検出処理により音楽データ内で1つの曲調区間を区切ると、次のステップSP12に移る。ステップSP12において主制御部50は、1つの曲調区間内で複数回検出した音量レベルに基づき当該1つの曲調区間に対応する区間特徴を検出して、次のステップSP13に移る。
【0112】
ステップSP13において主制御部50は、音楽データの全ての曲調区間に対して区間特徴を検出したか否かを判別する。このステップSP13において否定結果が得られると、このことは音楽データを途中までしか曲調区間に区切っていないことを表している。従って主制御部50は、かかる否定結果を得ると、ステップSP11に戻る。これにより主制御部50は、この後、ステップSP13において肯定結果を得るまでの間、ステップSP11乃至ステップSP13の処理を循環的に繰り返し実行する。従って主制御部50は、音楽データの先頭から順次区切られる曲調区間に対し区間特徴を検出する。
【0113】
そしてステップSP13において肯定結果が得られると、このことは音楽データを全体に渡り複数の曲調区間に区切り、これら複数の曲調区間に対し区間特徴を検出したことを表している。従って主制御部50は、かかる肯定結果を得ると、次のステップSP14に移り、かかる特徴解析処理手順RT2を終了する。
【0114】
さらに主制御部50は、圧縮音楽データの再生処理し、またパーソナルコンピュータ12から送信された音楽データの受信を開始すると、音楽出力プログラムに従って図13に示す動きデータ生成処理手順RT3を開始する。主制御部50は、かかる動きデータ生成処理手順RT3を開始すると、ステップSP21において音楽データ内で1つの曲調区間を区切り、かつその曲調区間に対する区間特徴を検出することを待ち受ける。そして主制御部50は、音楽データ内で1つの曲調区間を区切り、かつその曲調区間に対する区間特徴を検出すると、次のステップSP22に移る。
【0115】
ステップSP22において主制御部50は、音楽データ内で区切った1つの曲調区間に対し、その区間特徴に基づき可動部51の動きパターンデータを割り当てると共に、発光部52の発光パターンデータを割り当てる。そして主制御部50は、1つの曲調区間に割り当てた動きパターンデータ及び発光パターンデータをまとめてロボット動きデータを生成して、次のステップSP23に移る。
【0116】
ステップSP23において主制御部50は、音楽データの全ての曲調区間に対応するロボット動きデータを生成したか否かを判別する。このステップSP23において否定結果が得られると、このことは音楽データを途中までしか曲調区間に区切っていないことを表している。従って主制御部50は、かかる否定結果を得ると、ステップSP21に戻る。これにより主制御部50は、この後、ステップSP23において肯定結果を得るまでの間、ステップSP21乃至ステップSP23の処理を循環的に繰り返し実行する。従って主制御部50は、音楽データの先頭から後尾までの複数の曲調区間に対応するロボット動きデータを順次生成する。
【0117】
そしてステップSP23において肯定結果が得られると、このことは音楽データ全体の複数の曲調区間に対応するロボット動きデータを生成し終えたことを表している。従って主制御部50は、かかる肯定結果を得ると、次のステップSP24に移り、かかる動きデータ生成処理手順RT3を終了する。
【0118】
次いで図14に示すフローチャートを用いて、主制御部50がユーザの再生要求に応じて記憶部55から圧縮音楽データを読み出すときに実行する第1の音楽出力処理手順RT4について説明する。主制御部50は、記憶部55から圧縮音楽データの読み出しを開始すると、これに応じて音楽出力プログラムに従い図14に示す第1の音楽出力処理手順RT4を開始する。主制御部50は、かかる第1の音楽出力処理手順RT4を開始すると、ステップSP31において記憶部55から読み出している圧縮音楽データの再生処理を開始して、次のステップSP32及びステップSP33に移り2種類の処理を並行に実行する。
【0119】
ステップSP32において主制御部50は、圧縮音楽データを再生処理して得られる音楽データをバッファに一時記憶し始めて、次のステップSP34に移る。またステップSP33において主制御部50は、圧縮音楽データを再生処理しながら得られる音楽データを用いて上述した分析処理のビート検出処理手順RT1及び特徴解析処理手順RT2と、動きデータ生成処理手順RT3とを開始して、次のステップSP35に移る。そしてステップSP35において主制御部50は、ビート検出処理手順RT1及び特徴解析処理手順RT2と動きデータ生成処理手順RT3とを実行して生成した曲調区間に対応するロボット動きデータをバッファに一時記憶し始めて、次のステップSP34に移る。
【0120】
ステップSP34において主制御部50は、バッファへの音楽データの一時記憶を開始した時点から所定の遅延時間に達することを待ち受け、当該遅延時間に達すると、次のステップSP36に移る。ステップSP36において主制御部50は、バッファから音楽データを読み出して出力部57への送出を開始すると共に、当該バッファからロボット動きデータを読み出して駆動制御部53への送出を開始して、次のステップSP37に移る。
【0121】
ステップSP37において主制御部50は、出力部57から音楽データに基づく音楽を出力しながら、駆動制御部53により可動部51を駆動制御させると共に、発光部52を制御させて、次のステップSP38に移る。そしてステップSP38において主制御部50は、出力部57からの音楽の出力が終了したか否かを判別する。このステップSP38において否定結果が得られると、このことはバッファに対し、未だ音楽データとロボット動きデータとが溜まっていることを表している。従って主制御部50は、かかる否定結果を得ると、ステップSP37に戻る。
【0122】
これにより主制御部50は、この後、ステップSP38において肯定結果を得るまでの間、ステップSP37及びステップSP38の処理を循環的に繰り返し実行する。従って主制御部50は、出力部57から1曲の音楽を連続的に出力しながら、駆動制御部53により可動部51を駆動制御させると共に、発光部52を制御させる。そしてステップSP38において肯定結果が得られると、このことは出力部57からの1曲の音楽の出力が終了し、かつ駆動制御部53により可動部51の駆動制御と発光部52の制御も合わせて終了したことを表している。従って主制御部50は、かかる肯定結果を得ると、次のステップSP39に移り、かかる第1の音楽出力処理手順RT4を終了する。
【0123】
次いで、図15に示すフローチャートを用いて、パーソナルコンピュータ12からロボット動きデータを取得するときに実行する第2の音楽出力処理手順RT5について説明する。主制御部50は、ユーザにより所望の音楽が選択された状態で当該音楽に対応するロボット動きデータをパーソナルコンピュータ12に要求するように命令されると、音楽出力プログラムに従って図15に示す第2の音楽出力処理手順RT5を開始する。主制御部50は、かかる第2の音楽出力処理手順RT5を開始すると、ステップSP41においてユーザにより選択された音楽に対応するデータ識別情報と共に動きデータ要求情報を通信部56からパーソナルコンピュータ12に送信して、次のステップSP42に移る。
【0124】
ステップSP42において主制御部50は、パーソナルコンピュータ12から送信されるロボット動きデータの所定単位部分の受信を待ち受ける。そしてステップSP42において主制御部50は、通信部56により、パーソナルコンピュータ12から送信されたロボット動きデータの所定単位部分の受信が開始されると、次のステップSP43に移る。ステップSP43において主制御部50は、バッファへのロボット動きデータの一時記憶を開始して、実際に通信部56により受信されたロボット動きデータの所定単位部分をバッファへ一時記憶し、次のステップSP44に移る。
【0125】
ステップSP44において主制御部50は、記憶部55からユーザにより選択された音楽に対応する圧縮音楽データを読み出して再生処理を開始し、次のステップSP45に移る。ステップSP45において主制御部50は、記憶部55から読み出している圧縮音楽データを再生処理しながら、その結果得られる音楽データの出力部57への送出を開始すると共に、当該出力部57への音楽データの送出を開始したタイミングでバッファからロボット動きデータの所定単位部分を読み出すようにして駆動制御部53への送出を開始して、次のステップSP46に移る。
【0126】
ステップSP46において主制御部50は、出力部57から音楽データに基づく音楽を出力しながら、駆動制御部53により可動部51を駆動制御させると共に、発光部52を制御させて、次のステップSP47に移る。そしてステップSP47において主制御部50は、出力部57からの音楽の出力が終了したか否かを判別する。このステップSP47において否定結果が得られると、このことは主制御部50が未だ記憶部55から読み出している圧縮音楽データを再生処理しながら、その結果得られる音楽データを出力部57に送出していることを表している。従って主制御部50は、かかる否定結果を得ると、ステップSP46に戻る。
【0127】
これにより主制御部50は、この後、ステップSP47において肯定結果を得るまでの間、ステップSP46及びステップSP47の処理を循環的に繰り返し実行する。従って主制御部50は、出力部57から1曲の音楽を連続的に出力しながら、駆動制御部53により可動部51を駆動制御させると共に、発光部52を制御させる。そしてステップSP47において肯定結果が得られると、このことは出力部57からの1曲の音楽の出力が終了し、かつ駆動制御部53により可動部51の駆動制御と発光部52の制御も合わせて終了したことを表している。従って主制御部50は、かかる肯定結果を得ると、次のステップSP48に移り、かかる第2の音楽出力処理手順RT5を終了する。
【0128】
次いで図16に示すフローチャートを用いて、パーソナルコンピュータ12から圧縮音楽データが供給されるときに実行する第3の音楽出力処理手順RT6について説明する。主制御部50は、パーソナルコンピュータ12と通信接続すると、音楽出力プログラムに従い図16に示す第3の音楽出力処理手順RT6を開始する。主制御部50は、かかる第3の音楽出力処理手順RT6を開始すると、ステップSP51においてパーソナルコンピュータ12から送信される圧縮音楽データの受信を待ち受ける。そしてステップSP51において主制御部50は、通信部56により、パーソナルコンピュータ12から送信された圧縮音楽データの受信が開始されると、次のステップSP52に移る。
【0129】
ステップSP52において主制御部50は、通信部56により受信されている圧縮音楽データの再生処理を開始して、次のステップSP53及びステップSP54に移り2種類の処理を並行に実行する。ステップSP53において主制御部50は、圧縮音楽データを再生処理して得られる音楽データをバッファに一時記憶し始めて、次のステップSP55に移る。またステップSP54において主制御部50は、圧縮音楽データを再生処理して得られる音楽データを用いて上述した分析処理のビート検出処理手順RT1及び特徴解析処理手順RT2と、動きデータ生成処理手順RT3とを開始して、次のステップSP56に移る。そしてステップSP56において主制御部50は、ビート検出処理手順RT1及び特徴解析処理手順RT2と動きデータ生成処理手順RT3とを実行して生成した曲調区間に対応するロボット動きデータをバッファに一時記憶し始めて、次のステップSP55に移る。
【0130】
ステップSP55において主制御部50は、バッファへの音楽データの一時記憶を開始した時点から所定の遅延時間に達することを待ち受け、当該遅延時間に達すると、次のステップSP57に移る。ステップSP57において主制御部50は、バッファから音楽データを読み出して出力部57への送出を開始すると共に、当該バッファからロボット動きデータを読み出して駆動制御部53への送出を開始して、次のステップSP58に移る。
【0131】
ステップSP58において主制御部50は、出力部57から音楽データに基づく音楽を出力しながら、駆動制御部53により可動部51を駆動制御させると共に、発光部52を制御させて、次のステップSP59に移る。そしてステップSP59において主制御部50は、出力部57からの音楽の出力が終了したか否かを判別する。このステップSP59において否定結果が得られると、このことは主制御部50のバッファに対し、未だ音楽データとロボット動きデータとが溜まっていることを表している。従って主制御部50は、かかる否定結果を得ると、ステップSP58に戻る。
【0132】
これにより主制御部50は、この後、ステップSP59において肯定結果を得るまでの間、ステップSP58及びステップSP59の処理を循環的に繰り返し実行する。従って主制御部50は、出力部57から1曲の音楽を連続的に出力しながら、駆動制御部53により可動部51を駆動制御させると共に、発光部52を制御させる。そしてステップSP59において肯定結果が得られると、このことは出力部57からの1曲の音楽の出力が終了し、かつ駆動制御部53により可動部51の駆動制御と発光部52の制御も合わせて終了したことを表している。従って主制御部50は、かかる肯定結果を得ると、次のステップSP60に移り、かかる第3の音楽出力処理手順RT6を終了する。
【0133】
次いで図17に示すフローチャートを用いて、パーソナルコンピュータ12から音楽データが供給されるときに実行する第4の音楽出力処理手順RT7について説明する。主制御部50は、パーソナルコンピュータ12と通信接続すると、音楽出力プログラムに従い図17に示す第4の音楽出力処理手順RT7を開始する。主制御部50は、かかる第4の音楽出力処理手順RT7を開始すると、ステップSP61においてパーソナルコンピュータ12から送信される音楽データの受信を待ち受ける。そしてステップSP61において主制御部50は、通信部56により、パーソナルコンピュータ12から送信された音楽データの受信が開始されると、次のステップSP62及びステップSP63に移り2種類の処理を並行に実行する。
【0134】
ステップSP62において主制御部50は、通信部56により受信されている音楽データをバッファに一時記憶し始めて、次のステップSP64に移る。またステップSP63において主制御部50は、通信部56により受信されている音楽データを用いて上述した分析処理のビート検出処理手順RT1及び特徴解析処理手順RT2と、動きデータ生成処理手順RT3とを開始して、次のステップSP65に移る。そしてステップSP65において主制御部50は、ビート検出処理手順RT1及び特徴解析処理手順RT2と動きデータ生成処理手順RT3とを実行して生成した曲調区間に対応するロボット動きデータをバッファに一時記憶し始めて、次のステップSP64に移る。
【0135】
ステップSP64において主制御部50は、バッファへの音楽データの一時記憶を開始した時点から所定の遅延時間に達することを待ち受け、当該遅延時間に達すると、次のステップSP66に移る。ステップSP66において主制御部50は、バッファから音楽データを読み出して出力部57への送出を開始すると共に、当該バッファからロボット動きデータを読み出して駆動制御部53への送出を開始して、次のステップSP67に移る。
【0136】
ステップSP67において主制御部50は、出力部57から音楽データに基づく音楽を出力しながら、駆動制御部53により可動部51を駆動制御させると共に、発光部52を制御させて、次のステップSP68に移る。そしてステップSP68において主制御部50は、出力部57からの音楽の出力が終了したか否かを判別する。このステップSP68において否定結果が得られると、このことは主制御部50のバッファに対し、未だ音楽データとロボット動きデータとが溜まっていることを表している。従って主制御部50は、かかる否定結果を得ると、ステップSP67に戻る。
【0137】
これにより主制御部50は、この後、ステップSP68において肯定結果を得るまでの間、ステップSP67及びステップSP68の処理を循環的に繰り返し実行する。従って主制御部50は、出力部57から1曲の音楽を連続的に出力しながら、駆動制御部53により可動部51を駆動制御させると共に、発光部52を制御させる。そしてステップSP68において肯定結果が得られると、このことは出力部57からの1曲の音楽の出力が終了し、かつ駆動制御部53により可動部51の駆動制御と発光部52の制御も合わせて終了したことを表している。従って主制御部50は、かかる肯定結果を得ると、次のステップSP69に移り、かかる第4の音楽出力処理手順RT7を終了する。
【0138】
次いで図18に示すフローチャートを用いて、パーソナルコンピュータ12から圧縮音楽データと共にロボット動きデータが供給されるときに実行する第5の音楽出力処理手順RT8について説明する。主制御部50は、パーソナルコンピュータ12と通信接続すると、音楽出力プログラムに従い図18に示す第5の音楽出力処理手順RT8を開始する。主制御部50は、かかる第5の音楽出力処理手順RT8を開始すると、ステップSP71においてパーソナルコンピュータ12から送信されるロボット動きデータの所定単位部分の受信を待ち受ける。そしてステップSP71において主制御部50は、通信部56により、パーソナルコンピュータ12から送信されたロボット動きデータの所定単位部分の受信が開始されると、次のステップSP72に移る。
【0139】
ステップSP72において主制御部50は、バッファへのロボット動きデータの一時記憶を開始して、実際に通信部56により受信されたロボット動きデータの所定単位部分をバッファへ一時記憶し、次のステップSP73に移る。ステップSP73において主制御部50は、パーソナルコンピュータ12から送信される圧縮音楽データの受信を待ち受ける。そしてステップSP73において主制御部50は、通信部56により、パーソナルコンピュータ12から送信された圧縮音楽データの受信が開始されると、次のステップSP74に移る。
【0140】
ステップSP74において主制御部50は、通信部56により受信されている圧縮音楽データの再生処理を開始して、次のステップSP75に移る。ステップSP75において主制御部50は、通信部56により受信されている圧縮音楽データを再生処理しながら、その結果得られる音楽データの出力部57への送出を開始すると共に、当該出力部57への音楽データの送出を開始したタイミングでバッファからロボット動きデータの所定単位部分を読み出すようにして駆動制御部53への送出を開始して、次のステップSP76に移る。
【0141】
ステップSP76において主制御部50は、出力部57から音楽データに基づく音楽を出力しながら、駆動制御部53により可動部51を駆動制御させると共に、発光部52を制御させて、次のステップSP77に移る。そしてステップSP77において主制御部50は、出力部57からの音楽の出力が終了したか否かを判別する。このステップSP77において否定結果が得られると、このことは未だ通信部56により受信している圧縮音楽データを再生処理しながら、その結果得られる音楽データを出力部57へ送出していることを表している。従って主制御部50は、かかる否定結果を得ると、ステップSP76に戻る。
【0142】
これにより主制御部50は、この後、ステップSP77において肯定結果を得るまでの間、ステップSP76及びステップSP77の処理を循環的に繰り返し実行する。従って主制御部50は、出力部57から1曲の音楽を連続的に出力しながら、駆動制御部53により可動部51を駆動制御させると共に、発光部52を制御させる。そしてステップSP77において肯定結果が得られると、このことは出力部57からの1曲の音楽の出力が終了し、かつ駆動制御部53により可動部51の駆動制御と発光部52の制御も合わせて終了したことを表している。従って主制御部50は、かかる肯定結果を得ると、次のステップSP78に移り、かかる第5の音楽出力処理手順RT8を終了する。
【0143】
次いで図19に示すフローチャートを用いて、パーソナルコンピュータ12から音楽データと共にロボット動きデータが供給されるときに実行する第6の音楽出力処理手順RT9について説明する。主制御部50は、パーソナルコンピュータ12と通信接続すると、音楽出力プログラムに従い図19に示す第6の音楽出力処理手順RT9を開始する。主制御部50は、かかる第6の音楽出力処理手順RT9を開始すると、ステップSP81においてパーソナルコンピュータ12から送信されるロボット動きデータの所定単位部分の受信を待ち受ける。そしてステップSP81において主制御部50は、通信部56により、パーソナルコンピュータ12から送信されたロボット動きデータの所定単位部分の受信が開始されると、次のステップSP82に移る。
【0144】
ステップSP82において主制御部50は、バッファへのロボット動きデータの一時記憶を開始して、実際に通信部56により受信されたロボット動きデータの所定単位部分をバッファへ一時記憶し、次のステップSP83に移る。ステップSP83において主制御部50は、パーソナルコンピュータ12から送信される音楽データの受信を待ち受ける。そしてステップSP83において主制御部50は、通信部56により、パーソナルコンピュータ12から送信された音楽データの受信が開始されると、次のステップSP84に移る。
【0145】
ステップSP84において主制御部50は、通信部56により受信されている音楽データの出力部57への送出を開始すると共に、当該出力部57へ音楽データの送出を開始したタイミングでバッファからロボット動きデータの所定単位部分を読み出すようにして駆動制御部53への送出を開始して、次のステップSP85に移る。
【0146】
ステップSP85において主制御部50は、出力部57から音楽データに基づく音楽を出力しながら、駆動制御部53により可動部51を駆動制御させると共に、発光部52を制御させて、次のステップSP86に移る。そしてステップSP86において主制御部50は、出力部57からの音楽の出力が終了したか否かを判別する。このステップSP86において否定結果が得られると、このことは未だ通信部56により受信されている音楽データを出力部57へ送出していることを表している。従って主制御部50は、かかる否定結果を得ると、ステップSP85に戻る。
【0147】
これにより主制御部50は、この後、ステップSP86において肯定結果を得るまでの間、ステップSP85及びステップSP86の処理を循環的に繰り返し実行する。従って主制御部50は、出力部57から1曲の音楽を連続的に出力しながら、駆動制御部53により可動部51を駆動制御させると共に、発光部52を制御させる。そしてステップSP86において肯定結果が得られると、このことは出力部57からの1曲の音楽の出力が終了し、かつ駆動制御部53により可動部51の駆動制御と発光部52の制御も合わせて終了したことを表している。従って主制御部50は、かかる肯定結果を得ると、次のステップSP87に移り、かかる第6の音楽出力処理手順RT9を終了する。
【0148】
(3)実施の形態による動作及び効果
以上の構成において、音楽ロボット装置11は、パーソナルコンピュータ12から圧縮音楽データが送信されたとき、通信部56により当該圧縮音楽データを受信して主制御部50により再生処理しながら、その結果得られる音楽データを出力部57に送出して音楽として出力する。また音楽ロボット装置11は、この際、主制御部50により、圧縮音楽データを再生処理して得ている音楽データを用いて分析処理及び動きデータ生成処理を実行して、当該音楽データの複数の曲調区間をそれぞれ再生するときに可動部51を駆動制御するための動きデータと発光部52を制御するための発光データとを設定すると共に、これら曲調区間毎の動きデータ及び発光データを順次ロボット動きデータとして駆動制御部53に送出する。これにより音楽ロボット装置11は、パーソナルコンピュータ12から供給される圧縮音楽データを出力部57から音楽として出力しながら、駆動制御部53によりロボット動きデータに基づき可動部51を駆動制御して所定の可動部動きパターンで動かすと共に、発光部52を制御して所定の発光パターンで発光させる。
【0149】
また音楽ロボット装置11は、パーソナルコンピュータ12から音楽データが送信されたとき、通信部56により当該音楽データを受信しながら主制御部50によりその音楽データを出力部57に送出して音楽として出力する。また音楽ロボット装置11は、この際、主制御部50により、通信部56により受信している音楽データを用いて分析処理及び動きデータ生成処理を実行して、当該音楽データの複数の曲調区間をそれぞれ再生するときに可動部51を駆動制御するための動きデータと発光部52を制御するための発光データとを設定すると共に、これら曲調区間毎の動きデータ及び発光データを順次ロボット動きデータとして駆動制御部53に送出する。これにより音楽ロボット装置11は、パーソナルコンピュータ12から供給される音楽データを出力部57から音楽として出力しながら、駆動制御部53によりロボット動きデータに基づき可動部51を駆動制御して所定の可動部動きパターンで動かすと共に、発光部52を制御して所定の発光パターンで発光させる。
【0150】
従って音楽ロボット装置11は、記憶容量の比較的大きい記憶部を設けるようにして、ユーザに対し多数の圧縮音楽データや音楽データを転送して当該記憶部に記憶するように操作させることなく、また記憶容量の比較的小さい記憶部55を設けることで、ユーザに対し何度も異なる圧縮音楽データや音楽データをその記憶部55に対し記憶し直すように操作させることもなく、容易に、より多くの圧縮音楽データや音楽データを再生して音楽として出力することができる。そして音楽ロボット装置11は、圧縮音楽データや音楽データが供給されたときでも、当該圧縮音楽データや音楽データを受信しながら、これらを用いてロボット動きデータを生成して可動部51を駆動制御すると共に、発光部52を制御することで、より多くの音楽に合わせて容易に可動部51を動かして見せることができると共に、発光部52を発光させて見せることもできる。
【0151】
以上の構成によれば、音楽ロボット装置11において、通信部56により圧縮音楽データや音楽データを受信して出力部57から音楽として出力しながら、主制御部50によりその圧縮音楽データや音楽データを分析すると共に、その分析結果に基づいて音楽データに対応する動きパターンデータを設定して、駆動制御部53により、動きパターンデータに応じて可動部51を駆動制御するようにした。これにより音楽ロボット装置11は、ユーザに対し多数の圧縮音楽データや音楽データを記憶するように操作させることなく、また何度も異なる圧縮音楽データや音楽データを記憶し直すように操作させることもなく、容易に、より多くの音楽に合わせて可動部51を動かして見せることができる。よって音楽ロボット装置11は、従来に比べて使い勝手を格段的に向上させることができる。
【0152】
また音楽ロボット装置11は、パーソナルコンピュータ12から圧縮音楽データや音楽データのみの供給を受けるわけではなく、ロボット動きデータの供給を受け、また圧縮音楽データや、音楽データと共にロボット動きデータの供給も受けて、音楽の出力や可動部51の駆動制御に利用することができる。従って音楽ロボット装置11は、従来に比べてさらに使い勝手を向上させることができる。そして音楽ロボット装置11は、記憶部55に圧縮音楽データを記憶し得ると共に、ロボット動きデータの生成機能も有しているため、パーソナルコンピュータ12と無線通信し得ない状況でも、単独で圧縮音楽データを再生しながら可動部51を動かすことができる。さらに音楽ロボット装置11は、ロボット動きデータの生成機能を有していることにより、ロボット動きデータの生成機能を有しているパーソナルコンピュータ12だけではなく、当該ロボット動きデータの生成機能を有してはいなくても音楽ロボット装置11と無線通信可能な他の携帯電話機等の装置から圧縮音楽データや音楽データの供給を受けて、これらを再生しながら可動部51を動かすこともできる。よって音楽ロボット装置11は、従来に比べてさらに使い勝手を向上させると共に、汎用性や利便性も向上させることができる。
【0153】
さらに音楽ロボット装置11は、圧縮音楽データや音楽データを再生しながらロボット動きデータを生成するときには、出力部57への音楽データの送出開始と、駆動制御部53へのロボット動きデータの送出開始とを遅延させ、当該出力部57への音楽データの送出開始に同期させて駆動制御部53へのロボット動きデータの送出を開始するようにした。従って音楽ロボット装置11は、出力部57から出力する音楽の曲調に同期させて可動部51を順次所定の可動部動きパターンで動かすことができる。
【0154】
ところでパーソナルコンピュータ12は、音楽データの複数の周波数帯域のエネルギーを抽出して複雑なアルゴリズムによりロボット動きデータを生成している。これに対して音楽ロボット装置11は、音楽データの音量レベルに基づいて簡易なアルゴリズムでロボット動きデータを生成している。従って音楽ロボット装置11は、パーソナルコンピュータ12から圧縮音楽データや音楽データが供給されたときには、これらを音楽として出力しながら、パーソナルコンピュータ12に比べて、容易にかつ短時間にロボット動きデータを生成することができる。よって音楽ロボット装置11は、圧縮音楽データや音楽データを再生するとき、ロボット動きデータの生成により処理負荷が著しく増大することを回避することができる。
【0155】
そして音楽ロボット装置11は、パーソナルコンピュータ12に比べて、ロボット動きデータの生成に簡易なアルゴリズムを利用しているため、ビート位置の検出精度(すなわち、曲調区間の区切り精度でもある)や区間特徴の検出精度がわずかに低くなっている。しかしながら音楽ロボット装置11は、圧縮音楽データや音楽データを再生するとき、パーソナルコンピュータ12から、高い精度で検出されたビート位置(すなわち、高い精度で区切られた曲調区間)や高い精度で検出された区間特徴に基づいて生成されたロボット動きデータの供給を受け、そのロボット動きデータを可動部51の駆動制御に利用することができる。従って音楽ロボット装置11は、圧縮音楽データや音楽データを再生するとき、可動部51を音楽の曲調に精度良く同期させ、かつ当該音楽の特徴(すなわち、音楽の印象や雰囲気等)に合った可動部動きパターンで動かすことができる。
【0156】
さらに音楽ロボット装置11は、記憶部55に複数種類の動きパターンデータを記憶しておき、音楽データの曲調区間に対し、当該複数種類の動きパターンデータの中の1つを無作為に選択して割り当てるようにした。従って音楽ロボット装置11は、異なる時点に同一の圧縮音楽データや音楽データを再生するような場合でも、異なる可動部動きパターンを示す動きパターンデータを用いてロボット動きデータを生成し、また音楽の再生時間軸に沿って異なる順番の動きパターンデータを用いてロボット動きデータを生成することができる。これにより音楽ロボット装置11は、異なる時点に同一の圧縮音楽データや音楽データを再生する場合でも、当該音楽ロボット装置11全体を異なるように動かすことができる。
【0157】
(4)他の実施の形態
なお上述した実施の形態においては、音楽ロボット装置11において、音楽データの音量レベルを利用する簡易なアルゴリズムでロボット動きデータを生成するようにした場合について述べたが、本発明はこれに限らず、音楽ロボット装置11において、パーソナルコンピュータ12と同様に、音楽データの複数の周波数帯域のエネルギーを利用する複雑なアルゴリズムでロボット動きデータを生成するようにしても良い。かかる構成によれば、音楽ロボット装置11は、単独で圧縮音楽データを再生する場合、音楽の曲調に精度良く同期し、かつ当該音楽の特徴に合った可動部動きパターンを示すロボット動きデータを生成することができる。
【0158】
また上述した実施の形態においては、パーソナルコンピュータ12から音楽ロボット装置11へロボット動きデータを供給した後、圧縮音楽データや音楽データを供給するようにした場合について述べたが、本発明はこれに限らず、パーソナルコンピュータ12から音楽ロボット装置11へロボット動きデータを圧縮音楽データや音楽データと共に同時並行で供給するようにしても良い。かかる構成によれば、例えばパーソナルコンピュータ12から音楽ロボット装置11へロボット動きデータと音楽データとを同時に供給したとき、当該音楽ロボット装置11においてロボット動きデータの駆動制御部53への送出開始を何ら遅延させることなく、当該ロボット動きデータを受信しながら駆動制御部53を送出することができる。
【0159】
さらに上述した実施の形態においては、音楽ロボット装置11において、圧縮音楽データや音楽データを再生しながらロボット動きデータを生成するとき、出力部57への音楽データの送出開始と駆動制御部53へのロボット動きデータの送出開始とを遅延させるようにした場合について述べたが、本発明はこれに限らず、音楽ロボット装置11において、圧縮音楽データや音楽データを再生しながらロボット動きデータを生成するとき、出力部57への音楽データの送出開始を遅延させずに当該音楽データを出力部57に送出しながら、その音楽データの先頭から少なくとも2つ目以降の曲調区間を出力部57に送出するときに駆動制御部53へのロボット動きデータの送出を開始するようにしても良い。そして音楽ロボット装置11は、出力部57への音楽データの出力が終了したときに駆動制御部53へのロボット動きデータの送出も強制的に終了するようにしても良い。
【0160】
かかる構成によれば、音楽ロボット装置11では、出力部57から音楽を出力させ始めたときには、可動部51が動かないものの、当該出力部57から音楽をある程度出力した時点からその出力が終了するまでの間は、音楽の曲調に同期させて可動部51を動かすことができる。そして音楽ロボット装置11は、かかる構成により駆動制御部53へのロボット動きデータの送出開始を遅延させるだけの簡易な処理で、あたかも音楽の出力開始から可動部51の動きの開始を故意に遅らせているよう演出しているように見せて、音楽と可動部51の動きとをユーザに楽しませることができる。
【0161】
さらに上述した実施の形態においては、パーソナルコンピュータ12がユーザの要求に応じて音楽ロボット装置11へ圧縮音楽データや音楽データ、ロボット動きデータを供給するようにした場合について述べたが、本発明はこれに限らず、音楽ロボット装置11に対し例えば複数の音楽データを登録しているプレイリストのようなリストを保持しておき、当該音楽ロボット装置11がユーザの要求に応じて、かかるリストに従いパーソナルコンピュータ12に対し圧縮音楽データや音楽データ、ロボット動きデータを要求して、これらの供給を受けるようにしても良い。
【0162】
さらに上述した実施の形態においては、音楽ロボット装置11において主制御部50のバッファにロボット動きデータを一時記憶して駆動制御部53への送出開始を遅延させるようにした場合について述べたが、本発明はこれに限らず、駆動制御部53にバッファを設け、当該駆動制御部53のバッファにロボット動きデータを一時記憶することで、ロボット動きデータの駆動制御部53への送出開始を遅延させるのではなく、当該駆動制御部53に対しバッファからのロボット動きデータの読み出しを遅延させて、その結果、ロボット動きデータに基づく可動部51の駆動制御の開始及び発光部52の制御の開始を制御するようにしても良い。
【0163】
さらに上述した実施の形態においては、音楽ロボット装置11において、圧縮音楽データや音楽データを再生しながらロボット動きデータを生成するとき、単に出力部57への音楽データの送出開始と駆動制御部53へのロボット動きデータの送出開始とを遅延させるようにした場合について述べたが、本発明はこれに限らず、音楽ロボット装置11において、出力部57への音楽データの送出開始と駆動制御部53へのロボット動きデータの送出開始とを遅延させている間、駆動制御部53により、予め生成された特定の可動部動きパターンを示すロボット動きデータに基づいて可動部51を駆動制御(及び発光部52を制御)するようにしても良い。かかる構成によれば、例えば音楽ロボット装置11を、音楽に合わせた動きに先立ち、あたかも準備運動しているように演出して見せることができ、ユーザをより一層楽しませることができる。また音楽ロボット装置11では、音楽の出力が終了した時点からも特定の可動部動きパターンで可動部51を動かすようにしても良い。かかる構成によれば、音楽ロボット装置11のエンターテイメント性を格段的に向上させることができる。
【0164】
さらに上述した実施の形態においては、パーソナルコンピュータ12において圧縮音楽データを用いて生成したロボット動きデータを記憶保持するようにした場合について述べたが、本発明はこれに限らず、パーソナルコンピュータ12において圧縮音楽データを用いてロボット動きデータを生成したとき、当該圧縮音楽データに対する分析結果のみを記憶保持し、同一の圧縮音楽データを用いてロボット動きデータを生成するように要求される毎に、対応する分析結果を用いて曲調区間に対し動きパターンデータや発光パターンデータを新たに割り当てるようにしてロボット動きデータを生成するようにしても良い。かかる構成によれば、ロボット動きデータの生成時の処理負荷を大幅に低減させることができると共に、その生成に要する処理時間も大幅に短縮することができる。そしてかかる構成については、音楽ロボット装置11に反映させることもでき、これにより音楽ロボット装置11でも、ロボット動きデータの生成時における処理負荷を大幅に低減させることができると共に、その生成に要する処理時間も大幅に短縮することができる。また音楽ロボット装置11は、異なる時点に同じ圧縮音楽データや音楽データを再生するときに、当該音楽ロボット装置11全体の異なる動きを提供してユーザを楽しませることができる。
【0165】
さらに上述した実施の形態においては、音楽ロボット装置11やパーソナルコンピュータ12において図9に示すように、音楽データを1つの音として解析するようにした場合について述べたが、本発明はこれに限らず、音楽ロボット装置11やパーソナルコンピュータ12において、音楽データを右スピーカ28用のデータと左スピーカ29用のデータとに分けて分析処理し、例えば右スピーカ28用のデータに対する分析結果に基づき筐体右側回動部22、筐体右側開閉部24、右側車輪30、右側発光部34用の動きデータ及び発光データを生成し、左スピーカ29用のデータに対する分析結果に基づき筐体左側回動部23、筐体左側開閉部25、左側車輪31、左側発光部35用の動きデータ及び発光データを生成するようにしても良い。
【0166】
さらに上述した実施の形態においては、パーソナルコンピュータ12が1台の音楽ロボット装置11に対し圧縮音楽データや音楽データ、ロボット動きデータを供給するようにした場合について述べたが、本発明はこれに限らず、パーソナルコンピュータ12が少なくとも2台の音楽ロボット装置11に対し圧縮音楽データや音楽データ、ロボット動きデータを供給するようにしても良い。
【0167】
そして、かかる構成の際には、パーソナルコンピュータ12が、少なくとも2台の音楽ロボット装置11に対し例えば時間を数秒や十数秒程度ずらして圧縮音楽データや音楽データ、ロボット動きデータを供給することにより、これら少なくとも2台の音楽ロボット装置11に対し、同一の音楽を、時間をずらして出力させながら可動部51も時間をずらして動かすようにしても良い。因みに、パーソナルコンピュータ12は、少なくとも2台の音楽ロボット装置11が同一の圧縮音楽データを予め保持していると、圧縮音楽データの再生開始のタイミングをずらして通知し、又は同一のロボット動きデータを、タイミングをずらして供給しても、これら少なくとも2台の音楽ロボット装置11に対し音楽の出力と可動部51の動きとをずらして動作させることができる。
【0168】
また、かかる構成の際には、パーソナルコンピュータ12が1つの圧縮音楽データを用いて対称的な動きをさせるような2種類のロボット動きデータを生成し、これら2種類のロボット動きデータを圧縮音楽データ又は音楽データと共に2台の音楽ロボット装置11に対し同時に供給することにより、当該2台の音楽ロボット装置11に対し同一の音楽を合わせて出力させながら、互いの可動部51を対称的に動かすようにしても良い。因みに、パーソナルコンピュータ12は、2台の音楽ロボット装置11でロボット動きデータを生成する場合、これら2台の音楽ロボット装置11に対し、音楽データに割り当てる動きパターンデータや発光パターンデータを指示し、かつ割り当てる順番も指示することでも、互いの可動部51を対称的に動かすことができる。またパーソナルコンピュータ12は、この際に、2台の音楽ロボット装置11の一方の音楽ロボット装置11から右スピーカ28用の音楽を出力させ、他方の音楽ロボット装置11から左スピーカ29用の音楽を出力させるようにしても良い。そして、これらの構成によれば、音楽再生システム10において音楽ロボット装置11のエンターテイメント性を格段的に向上させることができる。
【0169】
さらに上述した実施の形態においては、本発明による音楽出力プログラムを、音楽ロボット装置11の記憶部55又は主制御部50の内部メモリに記憶された音楽出力プログラムに適用し、当該主制御部50がその音楽出力プログラムに従ってビート検出処理手順RT1、特徴解析処理手順RT2、動きデータ生成処理手順RT3、第1の音楽出力処理手順RT4、第2の音楽出力処理手順RT5、第3の音楽出力処理手順RT6、第4の音楽出力処理手順RT7、第5の音楽出力処理手順RT8及び第6の音楽出力処理手順RT9を実行するようにした場合について述べたが、本発明はこれに限らず、音楽ロボット装置11に対し、音楽出力プログラムが格納されたプログラム格納媒体をインストールして上述したビート検出処理手順RT1、特徴解析処理手順RT2、動きデータ生成処理手順RT3、第1の音楽出力処理手順RT4、第2の音楽出力処理手順RT5、第3の音楽出力処理手順RT6、第4の音楽出力処理手順RT7、第5の音楽出力処理手順RT8及び第6の音楽出力処理手順RT9を実行するようにしても良い。
【0170】
なお、このような上述したビート検出処理手順RT1、特徴解析処理手順RT2、動きデータ生成処理手順RT3、第1の音楽出力処理手順RT4、第2の音楽出力処理手順RT5、第3の音楽出力処理手順RT6、第4の音楽出力処理手順RT7、第5の音楽出力処理手順RT8及び第6の音楽出力処理手順RT9を実行させるための音楽出力プログラムを音楽ロボット装置11にインストールして実行可能な状態にするためのプログラム格納媒体としては、例えばフレキシブルディスク、CD−ROM(Compact Disc-Read Only Memory )、DVD(Digital Versatile Disc)等のパッケージメディアのみならず、各種プログラムが一時的もしくは永続的に格納される半導体メモリや磁気ディスク等で実現しても良い。また、これらプログラム格納媒体に音楽出力プログラムを格納する手段としては、ローカルエリアネットワークやインターネット、デジタル衛星放送等の有線及び無線通信媒体を利用しても良く、ルータやモデム等の各種通信インターフェイスを介して格納するようにしても良い。
【0171】
さらに上述した実施の形態においては、パーソナルコンピュータ12から圧縮音楽データや音楽データ、ロボット動きデータを音楽ロボット装置11に供給するようにした場合について述べたが、本発明はこれに限らず、音楽ロボット装置11との無線通信機能や有線通信機能を有する携帯電話機やPDA(Personal Digital Assistance )等の情報処理装置、また携帯型音楽再生装置や据置型音楽再生装置等の再生装置、DVDレコーダやハードディスクレコーダ等の記録再生装置、さらにはパーソナルコンピュータや携帯電話機を介して最終的に通信可能なネットワーク上のサーバ等のように、この他種々の装置から圧縮音楽データや音楽データ、ロボット動きデータを音楽ロボット装置11に供給するようにしても良い。
【0172】
さらに上述した実施の形態においては、本発明によるロボット装置を、図1乃至図19について上述した音楽ロボット装置1及び11に適用するようにした場合について述べたが、本発明はこれに限らず、可動部を有し、圧縮音楽データや音楽データの再生機能を有するものであれば、2足歩行型や4足歩行型、車型等のように、この他種々の形態のロボット装置に広く適用することができる。
【0173】
さらに上述した実施の形態においては、ロボット装置に設けられた可動部として、図1乃至図19について上述した音楽ロボット装置1の可動部2や、音楽ロボット装置11の筐体右側回動部22、筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30、左側車輪31を適用するようにした場合について述べたが、本発明はこれに限らず、ロボット装置の形態に応じて腕部や足部、首部、頭部等のように、この他種々の可動部を広く適用することができる。
【0174】
さらに上述した実施の形態においては、音楽データを受信する受信部として、図1乃至図19について上述した音楽ロボット装置1の受信部3や音楽ロボット装置11の通信部56を適用するようにした場合について述べたが、本発明はこれに限らず、UWB(Ultra Wide Band )と呼ばれる短距離無線通信技術に準拠した通信部等のように、この他種々の受信部を広く適用することができる。
【0175】
さらに上述した実施の形態においては、受信部により受信されている音楽データを音楽として出力する出力部として、図1乃至図19について上述した音楽ロボット装置1の出力部4や音楽ロボット装置11の出力部57を適用するようにした場合について述べたが、本発明はこれに限らず、アナログスピーカを有する出力部等のように、この他種々の出力部を広く適用することができる。
【0176】
さらに上述した実施の形態においては、受信部により受信されている音楽データを分析する分析部として、図1乃至図19について上述した音楽ロボット装置1の分析部5や音楽ロボット装置11の主制御部50を適用するようにした場合について述べたが、本発明はこれに限らず、CPU(Central Processing Unit )やDSP(Digital Signal Processor)等のように、この他種々の分析部を広く適用することができる。
【0177】
さらに上述した実施の形態においては、分析部により分析されている音楽データの分析結果に基づいて、出力部により出力される音楽に対応する可動部動きパターンを設定する設定部として、図1乃至図19について上述した音楽ロボット装置1の設定部6や音楽ロボット装置11の主制御部50を適用するようにした場合について述べたが、本発明はこれに限らず、CPU等のように、この他種々の設定部を広く適用することができる。
【0178】
さらに上述した実施の形態においては、受信部により音楽データが受信されながら出力部により音楽として出力されていると、設定部により設定された可動部動きパターンに応じて可動部を駆動制御する駆動制御部として、図1乃至図19について上述した音楽ロボット装置1の駆動制御部7や音楽ロボット装置11のマイクロコンピュータ構成の駆動制御部53を適用するようにした場合について述べたが、本発明はこれに限らず、CPU等のように、この他種々の駆動制御部を広く適用することができる。
【0179】
さらに上述した実施の形態においては、受信部により受信されている音楽データを再生処理しながら出力部に送出する再生処理部として、図1乃至図19について上述した音楽ロボット装置11の主制御部50を適用するようにした場合について述べたが、本発明はこれに限らず、DSPやイコライジング機能を有する再生処理部等のように、この他種々の再生処理部を広く適用することができる。
【0180】
さらに上述した実施の形態においては、出力部により音楽の所定区間部分が出力される毎に、可動部が可動部動きパターンで動くよう、再生処理部及び駆動制御部の少なくとも一方を制御する制御部として、図1乃至図19について上述した音楽ロボット装置11のマイクロコンピュータ構成の主制御部50を適用するようにした場合について述べたが、本発明はこれに限らず、CPUやDSP等のように、この他種々の制御部を広く適用することができる。
【0181】
さらに上述した実施の形態においては、設定部により音楽の所定区間部分に設定される複数種類の可動部動きパターンを示す動きパターンデータを記憶する記憶部として、図1乃至図19について上述した音楽ロボット装置11の記憶部55を適用するようにした場合について述べたが、本発明はこれに限らず、音楽ロボット装置11に内蔵される半導体メモリやハードディスクドライブ、また音楽ロボット装置11に着脱可能に取り付けられる半導体メモリやCD-ROMドライブ、ハードディスクドライブ等のように、この他種々の記憶部を広く適用することができる。
【産業上の利用可能性】
【0182】
本発明は、音楽を再生し、かつ可動部を有する自走可能な又は据置型の音楽ロボット装置や、4足歩行型及び2足歩行型の音楽ロボット装置等のロボット装置に利用することができる。
【図面の簡単な説明】
【0183】
【図1】本発明による音楽ロボット装置の構成の概要を示すブロック図である。
【図2】本発明による音楽再生システムの構成を示す略線図である。
【図3】本発明による音楽ロボット装置の外観構成を示す略線的斜視図である。
【図4】音楽ロボット装置の背面構成を示す略線図である。
【図5】筐体右側回動部及び筐体左側回動部に対する筐体右側開閉部及び筐体左側開閉部の開閉の説明に供する略線図である。
【図6】筐体右側回動部及び筐体左側回動部の回動の説明に供する略線図である。
【図7】パーソナルコンピュータの回路構成を示すブロック図である。
【図8】動きパターンデータテーブルの構成を示す略線図である。
【図9】ロボット動きデータの生成の説明に供する略線図である。
【図10】音楽ロボット装置の回路構成を示すブロック図である。
【図11】分析処理におけるビート検出処理手順を示すフローチャートである。
【図12】分析処理における特徴解析処理手順を示すフローチャートである。
【図13】動きデータ生成処理手順を示すフローチャートである。
【図14】第1の音楽出力処理手順を示すフローチャートである。
【図15】第2の音楽出力処理手順を示すフローチャートである。
【図16】第3の音楽出力処理手順を示すフローチャートである。
【図17】第4の音楽出力処理手順を示すフローチャートである。
【図18】第5の音楽出力処理手順を示すフローチャートである。
【図19】第6の音楽出力処理手順を示すフローチャートである。
【符号の説明】
【0184】
1、11……音楽ロボット装置、2、51……可動部、3……受信部、4、57……出力部、5……分析部、6……設定部、7、53……駆動制御部、10……音楽再生システム、12……パーソナルコンピュータ、20……楕円体状筐体、21……筐体中央部、22……筐体右側回動部、23……筐体左側回動部、24……筐体右側開閉部、25……筐体左側開閉部、28……右スピーカ、29……左スピーカ、30……右側車輪、31……左側車輪、34……右側発光部、35……左側発光部、50……主制御部、52……発光部、RT1……ビート検出処理手順、RT2……特徴解析処理手順、RT3……動きデータ生成処理手順、RT4……第1の音楽出力処理手順、RT5……第2の音楽出力処理手順、RT6……第3の音楽出力処理手順、RT7……第4の音楽出力処理手順、RT8……第5の音楽出力処理手順、RT9……第6の音楽出力処理手順。
【技術分野】
【0001】
本発明はロボット装置、音楽出力方法及び音楽出力プログラムに関し、例えば音楽に合わせて可動部を動かす音楽ロボット装置に適用して好適なものである。
【背景技術】
【0002】
従来のロボット装置は、腕部が動作する際に描く軌道を当該腕部の平均移動速度と共に動作パターンとして記憶している。またロボット装置は、音楽データに基づく音楽の種々のリズムを、それぞれ腕部の異なる平均移動速度の範囲と対応付けている。この状態でロボット装置は、音楽データを再生処理したとき、かかる音楽データに基づく音楽のリズムを抽出すると共に、当該抽出したリズムに対応する平均移動速度の範囲を決定する。そしてロボット装置は、その決定した平均移動速度の範囲に合う動作パターンを選択し、当該選択した動作パターンで腕部を動かすことにより、音楽を出力しながらダンスを踊っているように動作していた(例えば、特許文献1参照)。
【特許文献1】特開2005−231012公報(第1頁、第15頁、第16頁)
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところが、かかる構成のロボット装置は、内部のメモリに音楽データを記憶しており、当該メモリに記憶している音楽データを再生処理しながらダンスを踊っているように動作していた。このため、かかるロボット装置は、ダンスを踊るように動作するときの音楽の種類を増やすような場合、ユーザに対し、記憶容量の比較的大きいメモリに多数の音楽データを記憶するように操作させ、又は記憶容量の比較的小さいメモリに何度も異なる音楽データを記憶し直すように操作させる必要があり、使い勝手が良いとは言い難い問題があった。
【0004】
本発明は以上の点を考慮してなされたもので、使い勝手を向上し得るロボット装置、音楽出力方法及び音楽出力プログラムを提案しようとするものである。
【課題を解決するための手段】
【0005】
かかる課題を解決するため本発明においては、可動部を有するロボット装置において、受信部により音楽データを受信して出力部により音楽として出力しながら、分析部によりその音楽データを分析すると共に、設定部により音楽データの分析結果に基づいて、音楽に対応する可動部動きパターンを設定して、駆動制御部により、当該設定した可動部動きパターンに応じて可動部を駆動制御するようにした。
【0006】
従って本発明では、ユーザに対し、ロボット装置に多数の音楽データを記憶するように操作させることなく、また何度も異なる音楽データを記憶し直すように操作させることもなく、容易に、より多くの音楽に合わせて可動部を動かして見せることができる。
【発明の効果】
【0007】
本発明によれば、可動部を有するロボット装置において、受信部により音楽データを受信して出力部により音楽として出力しながら、分析部によりその音楽データを分析すると共に、設定部により音楽データの分析結果に基づいて、音楽に対応する可動部動きパターンを設定して、駆動制御部により、当該設定した可動部動きパターンに応じて可動部を駆動制御するようにしたことにより、ユーザに対し、ロボット装置に多数の音楽データを記憶するように操作させることなく、また何度も異なる音楽データを記憶し直すように操作させることもなく、容易に、より多くの音楽に合わせて可動部を動かして見せることができ、かくして使い勝手を向上し得るロボット装置、音楽出力方法及び音楽出力プログラムを実現することができる。
【発明を実施するための最良の形態】
【0008】
以下図面について、本発明の一実施の形態を詳述する。
【0009】
(1)音楽ロボット装置の概要
図1において、1は全体として本発明を適用した音楽ロボット装置の構成の概要を示す。かかる音楽ロボット装置1は、可動部2を有している。また音楽ロボット装置1において受信部3は、音楽データを受信する。さらに音楽ロボット装置1において出力部4は、受信部3により受信されている音楽データを音楽として出力する。さらに音楽ロボット装置1において分析部5は、受信部3により受信されている音楽データを分析する。さらにまた音楽ロボット装置1において設定部6は、分析部5により分析されている音楽データの分析結果に基づいて、出力部4により出力される音楽に対応する可動部動きパターンを設定する。そして音楽ロボット装置1において駆動制御部7は、受信部3により音楽データが受信されながら出力部4により音楽として出力されていると、設定部6により設定された可動部動きパターンに応じて可動部2を駆動制御する。
【0010】
かかる構成により音楽ロボット装置1は、ユーザに対し、多数の音楽データを記憶するように操作させることなく、また何度も異なる音楽データを記憶し直すように操作させることもなく、容易に、より多くの音楽に合わせて可動部2を動かして見せることができる。よって音楽ロボット装置1は、使い勝手を向上させることができる。
【0011】
(2)音楽再生システムの構成
図2において、10は全体として音楽再生システムを示す。かかる音楽再生システム10は、本発明を適用した音楽ロボット装置11とパーソナルコンピュータ12とを、例えば、近距離無線通信技術であるBlue toothに準拠して無線接続し得るようになされている。
【0012】
図3(A)及び(B)並びに図4に示すように、音楽ロボット装置11は、例えば全体として略楕円体状の装置筺体(以下、これを楕円体状筐体と呼ぶ)20を有している。かかる楕円体状筐体20は、その中央の略樽型形状の部分でなる筐体中央部21の互いに対向する一対の端部のうち、一方の端部(以下、これを右側端部と呼ぶ)側に略円錐台形状の部分でなる第1の筐体回動部(以下、これを筐体右側回動部と呼ぶ)22が設けられている。また楕円体状筐体20は、筐体中央部21の他方の端部(以下、これを左側端部と呼ぶ)側に、略円錐台形状の部分でなる第2の筐体回動部(以下、これを筐体左側回動部と呼ぶ)23が設けられている。
【0013】
さらに楕円体状筐体20は、筐体右側回動部22の右側に、キャップ形状の部分でなる第1の筐体開閉部(以下、これを筺体右側開閉部と呼ぶ)24が設けられている。さらにまた楕円体状筐体20は、筐体左側回動部23の左側に、キャップ形状の部分でなる第2の筐体開閉部(以下、これを筺体左側開閉部と呼ぶ)25が設けられている。
【0014】
そして楕円体状筐体20の中心点P1から当該楕円体状筐体20表面の最も遠い右側及び左側の両頂点P2、P3を直線で結ぶ線分(すなわち、楕円体の長軸)を水平回動軸線L1とすると、筐体右側回動部22は、筐体中央部21の右側端部に対し、当該水平回動軸線L1を中心にして軸回り一方向D1及びこれとは逆の軸回り他方向に回動可能に枢支されている。また筐体左側回動部23は、筐体中央部21の左側端部に対し、水平回動軸線L1を中心にして軸回り一方向D1及び軸回り他方向に回動可能に枢支されている。
【0015】
さらに図5に示すように、筐体右側開閉部24は、筐体右側回動部22に対し、当該筐体右側回動部22の右側縁部22Aの所定位置に設けられたヒンジ部26を介して所定角度範囲で開閉可能に取り付けられている。因みに筐体右側開閉部24は、筐体右側回動部22の右側縁部22Aに対し開口縁部24Aを当接させる位置から、右側縁部22Aと開口縁部24Aとの開き角度が略90度等となる位置までの所定角度範囲内で任意の角度に開くようになされている。
【0016】
一方、筐体左側開閉部25は、筐体左側回動部23に対し、当該筐体左側回動部23の左側縁部23Aの所定位置に設けられたヒンジ部27を介して所定角度範囲で開閉可能に取り付けられている。因みに筐体左側開閉部25は、筐体左側回動部23に対し、左側縁部23Aに対し開口縁部25Aを当接させる位置から、左側縁部23Aと開口縁部25Aとの開き角度が略90度等となる位置までの所定角度範囲で任意の角度に開くようになされている。
【0017】
さらに筐体右側回動部22は、筒状に形成されており、内部にステレオ用の一対の第1及び第2のスピーカ28及び29のうち右チャンネル用の第1のスピーカ(以下、これを右スピーカと呼ぶ)28が円形の振動板の正面のみを右側縁部22Aの開口から露出させて収納されている。ここで筐体右側開閉部24は、筐体左側開閉部25とは独立して開閉し得るようになされている。そして筐体右側開閉部24は、ヒンジ部26を介して回転して、開口縁部24Aを筐体右側回動部22の右側縁部22Aに当接させて閉じた場合、右スピーカ28の振動板を外部から隠すことができる。また筐体右側開閉部24は、ヒンジ部26を介して回転して、開口縁部24Aを筐体右側回動部22の右側縁部22Aから離間させるように開いた場合、右スピーカ28の振動板を外部に露出させ得るようになされている。
【0018】
一方、筐体左側回動部23も、筒状に形成されており、内部に右スピーカ28と同様構成及び同様形状の左チャンネル用の第2のスピーカ(以下、これを左スピーカと呼ぶ)29が円形の振動板の正面のみを左側縁部23Aの開口から露出させて収納されている。従って筐体左側開閉部25は、ヒンジ部27を介して回転して、開口縁部25Aを筐体左側回動部23の左側縁部23Aに当接させて閉じた場合、左スピーカ29の振動板を外部から隠すことができる。また筐体左側開閉部25は、ヒンジ部27を介して回転して、開口縁部25Aを筐体左側回動部23の左側縁部23Aから離間させるように開いた場合、左スピーカ29の振動板の正面を外部に露出させ得るようになされている。
【0019】
また図6に示すように、筐体右側回動部22は、筐体左側回動部23とは独立して回動し得るようになされている。そして筐体右側回動部22は、筐体右側開閉部24の開閉動作からも独立して回動し得るようになされている。また筐体左側回動部23も、筐体左側開閉部25の開閉動作とは独立して回動し得るようになされている。
【0020】
これに加えて図3(A)及び(B)並びに図4に示すように、筐体中央部21の右側端部には、当該筐体中央部21の最大外径よりも大きい所定外径を有する円環形状の右側車輪30が水平回動軸線L1を中心にして軸回り一方向D1及び軸回り他方向に回動可能に枢支されている。また筐体中央部21の左側端部には、右側車輪30と同様形状及び同様外形の左側車輪31が水平回動軸線L1を中心にして軸回り一方向D1及び軸回り他方向に回動可能に枢支されている。かかる右側車輪30は、左側車輪31と共に回転して楕円体状筐体20を自走させるためのものであり、当該左側車輪31とは独立して回動し得るようになされている。
【0021】
そして筐体中央部21内には、内壁所定位置にバッテリ等でなる重り32が固定されている。また筐体中央部21は、楕円体状筐体20の中心点P1から右側端部(すなわち、右側車輪30)までの距離と、当該楕円体状筐体20の中心点P1から左側端部(すなわち、左側車輪31)までの距離とがほぼ等しい所定距離に選定されている。さらに筐体右側回動部22及び筐体左側回動部23は、互いに同じ形状でなり、互いの幅がほぼ等しい所定幅に選定されている。さらに筐体右側開閉部24及び筐体左側開閉部25も、互いに同じ形状でなり、それぞれ開口縁部24A及び25Aから表面の頂点P2及びP3までの幅がほぼ等しい所定幅に選定されている。すなわち楕円体状筐体20は、当該楕円体状筐体20の中心P1を通り、水平回動軸線L1を垂線とする仮想平面(図示せず)に対し左右が面対称に形成されている。
【0022】
このため楕円体状筐体20は、机の天板や床等(以下、これらをまとめて床と呼ぶ)に載上される場合、筐体中央部21の最大外形部分の外周面を当該床の表面から僅かに離間させ、かつ水平回動軸線L1を床の表面と平行にした姿勢で右側車輪30及び左側車輪31により支持される。これに加えて楕円体状筐体20は、筐体中央部21内の重り32により当該筐体中央部21の重心が中心点P1から内壁寄りにずれているため、床に載上された場合、当該重り32を鉛直下側に位置させた(すなわち、重り32部分でなる重心を床の表面に極力近づけた)姿勢(以下、これを基準姿勢と呼ぶ)となる。
【0023】
そして筐体中央部21内の重り32は、重さが比較的重く選定されている。従って楕円体状筐体20は、右側車輪30及び左側車輪31によって支持された状態で床に載上された場合、筐体右側開閉部24及び筐体左側開閉部25がそれぞれ独立して任意の角度に開かれても、右側及び左側等に傾くことなく基準姿勢を維持することができる。また楕円体状筐体20は、筐体右側開閉部24及び筐体左側開閉部25がそれぞれ独立して開かれた状態で筐体右側回動部22及び筐体左側回動部23がそれぞれ独立して回転しても、右側及び左側等に傾くことなく基準姿勢を維持することができる。
【0024】
これに加えて楕円体状筐体20は、床の上を右側車輪30及び左側車輪31の回転により自走する場合も、筐体中央部21内の重り32により当該筐体中央部21の重心が中心点P1から内壁寄りにずれているため、当該筐体中央部21が水平回動軸線L1を中心にして軸回り一方向D1及び軸回り他方向に回転することを抑制し得るようになされている。さらに楕円体状筐体20は、重り32が比較的重いため、自走する際に筐体右側開閉部24及び筐体左側開閉部25がそれぞれ独立して任意の角度に開かれても、右側及び左側等にほとんど傾くことなく基準姿勢をほぼ維持することができる。また楕円体状筐体20は、自走する際に筐体右側開閉部24及び筐体左側開閉部25がそれぞれ独立して開かれた状態で筐体右側回動部22及び筐体左側回動部23がそれぞれ独立して回転しても、右側及び左側等にほとんど傾くことなく基準姿勢をほぼ維持することができる。
【0025】
ところで筐体中央部21の表面には、基準姿勢で上側となる位置に、指や手等が接触したことを検知するための接触検知センサ33が設けられている。かかる接触検知センサ33は、例えば、筐体中央部21の表面における指先大の領域に接触した指や手等を検知するようになされている。また右側車輪30の右側には、光を発する環状の右側発光部34が設けられている。さらに左側車輪31の左側にも、右側発光部34と同様構成の光を発する環状の左側発光部35が設けられている。そして右側発光部34及び左側発光部35は、それぞれ全体や一部分、また発光色等のように発光状態を可変して発光し得るようになされている。
【0026】
次いで図7を用いて、パーソナルコンピュータ12の回路構成について説明する。かかるパーソナルコンピュータ12は、例えばマイクロコンピュータ構成の制御部40が、キーボードやマウス等でなる入力部41に対するユーザ操作に応じて種々の命令が入力されると、当該制御部40の内部メモリ(図示せず)、又はハードディスクドライブでなる記憶部42に予め記憶されている基本プログラムやアプリケーションプログラム等の各種プログラムを読み出す。そして制御部40は、これら各種プログラムに従って全体を制御すると共に、所定の演算処理や、入力部41を介して入力される種々の命令に応じた各種処理を実行する。
【0027】
これにより制御部40は、ユーザにより入力部41を介して、CD(Compact Disc)等のメディアに記録された音楽データを録音するための操作命令が入力されると、パーソナルコンピュータ12に装填されたメディアから音楽データを読み出すと共に、当該読み出した音楽データを圧縮符号化することにより圧縮音楽データを生成し、これを記憶部42に送出して記憶する。因みに制御部40は、この際、ネットワーク通信処理部43を介してネットワーク上の属性情報提供サーバ(図示せず)にアクセスし、メディアに記録されている音楽データのデータ属性情報を取得する。これにより制御部40は、記憶部42に対し、そのデータ属性情報を圧縮音楽データに対応付けて記憶している。なおデータ属性情報は、例えば音楽データ固有のデータ識別情報や、その音楽データに基づく音楽のタイトル、アーティスト、ジャンル等の種々の情報を含んでいる。
【0028】
また制御部40は、ユーザにより入力部41を介して、所望の音楽データを配信要求するための操作命令が入力されると、これに応じてネットワーク通信処理部43を介してネットワーク上の音楽提供サーバ(図示せず)にアクセスし所望の音楽データをダウンロード要求する。その結果、制御部40は、音楽提供サーバから返信される、圧縮音楽データ(すなわち、所望の音楽データが圧縮符号化されて生成されているものである)と、対応するデータ属性情報とを、ネットワーク通信処理部43を介して受信する。そして制御部40は、記憶部42に対し、かかる圧縮音楽データをデータ属性情報と対応付けて記憶する。このようにして制御部40は、記憶部42に対し、多数の圧縮音楽データを記憶し得るようになされている。
【0029】
そして制御部40は、ユーザにより入力部41を介して記憶部42内の圧縮音楽データが指定され、かつ当該指定された圧縮音楽データを再生するように要求する操作命令が入力されると、これに応じて記憶部42から、当該指定された圧縮音楽データを読み出す。また制御部42は、その記憶部42から読み出した圧縮音楽データに対し復号等の再生処理を施して元の音楽データを生成し、これをデジタルアナログ変換器やアンプ、スピーカ等でなる出力部44に送出する。これにより制御部40は、出力部44から、記憶部42に記憶していた圧縮音楽データに基づく音楽を出力してユーザに聴かせることができる。
【0030】
さらに記憶部42は、ユーザにより入力部41を介してメディアから音楽データを再生するように要求する操作命令が入力されると、パーソナルコンピュータ12に装填されたメディアから音楽データを読み出して出力部44に送出する。これにより制御部40は、出力部44から、メディアに記録された音楽データに基づく音楽を出力してユーザに聴かせることもできる。
【0031】
さらに制御部40は、各種プログラムの実行結果(例えば、音楽データの取得、録音及び再生等)に応じた表示用データを生成して、表示制御部やディスプレイでなる表示部45に送出する。これにより制御部40は、表示部45において表示用データに基づき、音楽データの取得、録音及び再生等に関する各種画面を表示して、ユーザに視認させることができる。
【0032】
かかる構成に加えて制御部40は、通信部46を介して音楽ロボット装置11と無線通信し得るようになされている。そして制御部40は、ユーザにより入力部41を介して、音楽ロボット装置11に記憶保持させる圧縮音楽データが指定され、かつ当該指定された圧縮音楽データを音楽ロボット装置11へ送信するように要求する操作命令が入力されると、記憶部42から、その指定された圧縮音楽データと対応するデータ属性情報とを読み出す。そして制御部40は、このとき記憶部42から読み出した圧縮音楽データとデータ属性情報とをそのまま通信部46を介して音楽ロボット装置11に送信する。これにより制御部40は、音楽ロボット装置11に対し圧縮音楽データ及びデータ属性情報を供給して記憶保持させることができる。
【0033】
また制御部40は、ユーザにより入力部41を介して圧縮音楽データが指定され、かつ当該指定された圧縮音楽データを音楽ロボット装置11で再生するように要求する操作命令が入力されると、記憶部42から、その指定された圧縮音楽データを読み出す。このとき制御部40は、ユーザ設定等に応じて、記憶部42から圧縮音楽データを読み出しながら、そのままストリーミング方式で通信部46を介して音楽ロボット装置11に送信し、又は記憶部42から読み出している圧縮音楽データを再生処理しながら、その結果得られる元の音楽データとしてストリーミング方式で通信部46を介して音楽ロボット装置11に送信する。このようにして制御部40は、記憶部42に記憶保持している圧縮音楽データをそのまま又は元の音楽データとして音楽ロボット装置11に供給し得るようになされている。
【0034】
ところで制御部40は、記憶部42に対し、音楽ロボット装置11に設けられた可動部としての筐体右側回動部22、筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30及び左側車輪31それぞれを予め選定された数秒のような所定時間(以下、これを動き実行時間と呼ぶ)に、所望の動きパターン(以下、これを可動部動きパターンと呼ぶ)で動かすための動きパターンデータを記憶している。この動きパターンデータは、筐体右側回動部22、筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30、左側車輪31毎に複数種類用意されている。
【0035】
そして筐体右側回動部22に対応する複数種類の動きパターンデータは、それぞれ1つの可動部動きパターンに応じた当該筐体右側回動部22の動きの開始から終了までの回転方向や回転角度、回転速度、回転方向の反転等を、動き実行時間の時間軸に沿って示すように生成されている。また筐体左側回動部23に対応する複数種類の動きパターンデータも同様に、それぞれ1つの可動部動きパターンに応じた当該筐体左側回動部23の動きの開始から終了までの回転方向や回転角度、回転速度、回転方向の反転等を、動き実行時間の時間軸に沿って示すように生成されている。因みに筐体右側回動部22や筐体左側回動部23に対応する可動部動きパターンとしては、例えば比較的遅く所定方向へ回転するように動く可動部動きパターンや、比較的速く所定方向へ回転するように動く可動部動きパターン、回転方向をすばやく何度も反転させるように動く可動部動きパターン等がある。
【0036】
さらに筐体右側開閉部24に対応する複数種類の動きパターンデータは、それぞれ1つの可動部動きパターンに応じた当該筐体右側開閉部24の動きの開始から終了までの開閉方向や開閉角度、開閉速度、開閉回数等を、動き実行時間の時間軸に沿って示すように生成されている。また筐体左側開閉部25に対応する複数種類の動きパターンデータも同様に、それぞれ1つの可動部動きパターンに応じた当該筐体左側開閉部25の動きの開始から終了までの開閉方向や開閉角度、開閉速度、開閉回数等を、動き実行時間の時間軸に沿って示すように生成されている。因みに筐体右側開閉部24や筐体左側開閉部25に対応する可動部動きパターンとしては、例えば比較的遅く開く又は閉じるように動く可動部動きパターンや、比較的速く開く又は閉じるように動く可動部動きパターン、開閉方向をすばやく何度も反転させるように動く可動部動きパターン等がある。
【0037】
さらに右側車輪30に対応する複数種類の動きパターンデータは、それぞれ1つの可動部動きパターンに応じた当該右側車輪30の動きの開始から終了までの回転方向や回転角度、回転速度、回転数等を、動き実行時間の時間軸に沿って示すように生成されている。また左側車輪31に対応する複数種類の動きパターンデータも同様に、それぞれ1つの可動部動きパターンに応じた当該左側車輪31の動きの開始から終了までの回転方向や回転角度、回転速度、回転数等を、動き実行時間の時間軸に沿って示すように生成されている。因みに右側車輪30や左側車輪31に対応する可動部動きパターンとしては、例えば比較的遅く所定方向へ回転するように動く可動部動きパターンや、比較的速く所定方向へ回転するように動く可動部動きパターン、回転方向をすばやく何度も反転させるように動く可動部動きパターン等がある。
【0038】
実際に制御部40は、図8に示すように記憶部42において動きパターンデータ管理用のデータベース(以下、これを動きパターンデータベースと呼ぶ)MDBを構築している。そして制御部40は、筐体右側回動部22、筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30、左側車輪31毎の複数種類の動きパターンデータを、テンポの速い音楽やテンポの遅い音楽、朝の時間帯に合う音楽等のように音楽の種々の特徴に応じて分類して(すなわち、音楽のテンポのような種々の特徴それぞれに合う可動部動きパターン同士をまとめるようにして)動きパターンデータベースMDBに登録している。
【0039】
また制御部40は、音楽ロボット装置11に設けられた発光部としての右側発光部34や左側発光部35それぞれを動き実行時間に、所望の発光パターンで発光させるための複数種類の発光パターンデータも、音楽のテンポのような種々の特徴に応じて分類して(すなわち、音楽のテンポのような種々の特徴それぞれに合う発光パターン同士をまとめるようにして)動きパターンデータベースMDBに登録している。
【0040】
因みに右側発光部34に対応する複数種類の発光パターンデータは、それぞれ1つの発光パターンに応じた当該右側発光部34の発光の開始から終了までの発光状態の変化を動き実行時間の時間軸に沿って示すように生成されている。また左側発光部35に対応する複数種類の発光パターンデータも同様に、それぞれ1つの発光パターンに応じた当該左側発光部35の発光の開始から終了までの発光状態の変化を動き実行時間の時間軸に沿って示すように生成されている。そして右側発光部34や左側発光部35に対応する発光パターンとしては、例えば環全体を1つの発光色で所定時間継続して発光させる発光パターンや、環全体を順次発光色を切り替えて発光させる発光パターン、環を部分的に発光させる発光パターン等がある。
【0041】
そして制御部40は、例えばユーザにより入力部41を介して圧縮音楽データが指定され、かつ当該指定された圧縮音楽データに基づく音楽に合わせて音楽ロボット装置11全体を動かす動きデータ(以下、これをロボット動きデータと呼ぶ)を生成するように要求する操作命令が入力されると、動きデータ生成処理を実行する。これにより制御部40は、かかる動きパターンデータや発光パターンデータを用いてロボット動きデータを生成し得るようになされている。実際に制御部40は、動きデータ生成処理を実行する場合、その動きデータ生成処理と同時並行に、このとき記憶部42から読み出した圧縮音楽データを再生処理しながら、その結果得られる元の音楽データを分析する分析処理も実行している。そして制御部40は、かかる分析処理としては、音楽データにおいて音楽のビートに相当する位置(以下、これをビート位置と呼ぶ)を検出するビート検出処理と、当該音楽の特徴を解析する特徴解析処理とを同時並行で実行している。
【0042】
制御部40は、ロボット動きデータを生成する場合、ビート検出処理において、音楽データの順次(すなわち、音楽データの先頭から後尾にかけて)所定の単位処理部分(例えば、1秒分の音楽に相当する部分)から所定周波数帯域毎のエネルギーを抽出しながら、当該単位処理部分毎に各周波数帯域のエネルギーの総和を求める。また制御部40は、単位処理部分毎のエネルギーの総和をもとに、音楽の時間軸に沿ってエネルギーの総和が著しく大きい位置を当該音楽のビートに相当するビート位置として順次検出する。そして制御部40は、音楽データをその先頭から後尾に渡り、所定数毎のビート位置を区切り位置とした例えば音楽の2/1小節や1小節、2小節に相当するような所定の区間(以下、これを曲調区間と呼ぶ)に順次区切るようにする。
【0043】
また制御部40は、特徴解析処理において、音楽データの順次(すなわち、音楽データの先頭から後尾にかけて)単位処理部分から1オクターブの12音階それぞれに相当する周波数帯域毎のエネルギーを抽出しながら、音楽データの曲調区間毎にこれら周波数帯域毎のエネルギーをもとにして、音楽の演奏に利用されている楽器やコード等の種々の情報(以下、これを区間情報と呼ぶ)を検出する。さらに制御部40は、かかる音楽データの曲調区間毎に、その検出した区間情報をもとに音楽の特徴(以下、これを区間特徴と呼ぶ)を検出する。
【0044】
さらに制御部40は、ビート検出処理及び特徴解析処理により音楽データを曲調区間に区切り、その曲調区間について区間特徴を検出する毎に、動きデータ生成処理において、当該音楽データの曲調区間を再生する間(すなわち、音楽データの曲調区間に相当する音楽の所定区間部分が出力される間)、可動部を動かすための可動部動きパターンや発光部を発光させるための発光パターンを設定する。すなわち図9に示すように、制御部40は、音楽データを曲調区間KB1乃至KB6に区切ると、記憶部42内の動きパターンデータベースMDBから、その曲調区間KB1乃至KB6の区間特徴に対応する例えば筐体右側回動部22の複数種類の動きパターンデータの中の、1つの動きパターンデータを無作為に選択して読み出す。
【0045】
そして制御部40は、音楽データの曲調区間KB1乃至KB6に対し、その読み出した1つの動きパターンデータを割り当てる。すなわち、制御部40は、かかる曲調区間KB1乃至KB6を再生する間、筐体右側回動部22を駆動制御するための動きパターンデータを、このとき記憶部42内の動きパターンデータベースMDBから読み出した1つの動きパターンデータに設定する。これにより制御部40は、音楽データの曲調区間KB1乃至KB6に相当する音楽の所定区間部分が出力されるときの筐体右側回動部22に対する可動部動きパターンを設定する。
【0046】
また制御部40は、同様にして音楽データの曲調区間KB1乃至KB6に対し、区間特徴に基づき筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30、左側車輪31毎の1つの動きパターンデータも選択して割り当てる。すなわち、制御部40は、かかる曲調区間KB1乃至KB6を再生する間、筐体左側回動部23や筐体右側開閉部24、筐体左側開閉部25、右側車輪30、左側車輪31それぞれを駆動制御するための動きパターンデータを、記憶部42内の動きパターンデータベースMDBから読み出した動きパターンデータに設定する。これにより制御部40は、音楽データの曲調区間KB1乃至KB6に相当する音楽の所定区間部分が出力されるときの筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30及び左側車輪31それぞれの可動部動きパターンも設定する。
【0047】
さらに制御部40は、同様にして音楽データの曲調区間KB1乃至KB6に対し、区間特徴に基づき右側発光部34、左側発光部35毎の1つの発光パターンも選択して割り当てる。すなわち、制御部40は、かかる曲調区間KB1乃至KB6を再生する間、右側発光部34や左側発光部35それぞれを制御するための発光パターンデータを、記憶部42内の動きパターンデータベースMDBから読み出した発光パターンデータに設定する。これにより制御部40は、音楽データの曲調区間KB1乃至KB6に相当する音楽の所定区間部分が出力されるときの右側発光部34及び左側発光部35それぞれの発光パターンを設定する。
【0048】
因みに制御部40は、動き実行時間の間、筐体右側回動部22、筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30及び左側車輪31を全く動かさないようにするために、例えば動き実行時間の時間軸に沿って「0」の値を示す動きパターンデータ(以下、これを特に動き停止パターンデータと呼ぶ)も記憶部42に記憶している。また制御部40は、動き実行時間の間、右側発光部34や左側発光部35を全く発光させないようにするために、例えば動き実行時間の時間軸に沿って「0」の値を示す発光パターンデータ(以下、これを特に発光停止パターンデータと呼ぶ)も記憶部42に記憶している。
【0049】
そして制御部40は、特徴解析処理により音楽データの曲調区間KB1乃至KB6に相当する音楽の所定区間部分が間奏に相当する部分であることを検出したとき等には、その曲調区間KB1乃至KB6に対し、筐体右側回動部22や筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30、左側車輪31の何れか又は全ての動きパターンデータとして動き停止パターンデータを割り当てることもできる。また制御部40は、このような場合、音楽データの曲調区間KB1乃至KB6に対し、右側発光部34や左側発光部35の何れか又は全ての発光パターンデータとして発光停止パターンデータを割り当てることもできる。
【0050】
すなわち、制御部40は、音楽データの曲調区間KB1乃至KB6に対応する区間特徴に応じて、当該曲調区間KB1乃至KB6に相当する音楽の所定区間部分が出力されるときに筐体右側回動部22、筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30及び左側車輪31を全く動かさないように設定することができる。また制御部40は、音楽データの曲調区間KB1乃至KB6に対応する区間特徴に応じて、当該曲調区間KB1乃至KB6に相当する音楽の所定区間部分が出力されるときに右側発光部34及び左側発光部35を全く発光させないように設定することもできる。
【0051】
さらに制御部40は、音楽データの複数の曲調区間KB1乃至KB6の中で、区間情報として同一のコードが使用されていることを検出した少なくとも2つの曲調区間KB1乃至KB6に対しては、筐体右側回動部22、筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30及び左側車輪31の少なくとも1つについて同一の動きパターンデータを割り当てるようにしている。さらに制御部40は、区間情報として同一のコードが使用されていることを検出した少なくとも2つの曲調区間KB1乃至KB6に対しては、右側発光部34及び左側発光部35の少なくとも1つについて同一の発光パターンデータを割り当てるようにしている。
【0052】
さらに制御部40は、音楽データの曲調区間KB1乃至KB6に対し動きパターンデータ及び発光パターンデータを割り当てる場合、当該曲調区間KB1乃至KB6に付加されているタイムコードに基づき、その曲調区間KB1乃至KB6が実際に音楽の所定区間部分として出力されるときの再生時間(以下、これを区間再生時間と呼ぶ)を検出する。そして制御部40は、曲調区間KB1乃至KB6の区間再生時間と動き実行時間とを比較する。その結果、制御部40は、区間再生時間と動き実行時間とが一致していると、曲調区間KB1乃至KB6に対し動きパターンデータ及び発光パターンデータをそのまま割り当てる。
【0053】
これに対して制御部40は、区間再生時間が動き実行時間よりも短いと、その動き実行時間を区間再生時間に合わせるように動きパターンデータ及び発光パターンデータを動き実行時間の時間軸に沿って圧縮するように加工して曲調区間KB1乃至KB6に割り当てる。すなわち、制御部40は、このような場合、本来の可動部動きパターンが示す動きを、これよりもすばやい動きの可動部動きパターンに加工し、また本来の発光パターンが示す発光状態を、これよりもすばやく変化する発光状態の発光パターンに加工している。
【0054】
また制御部40は、区間再生時間が動き実行時間よりも長いと、その動き実行時間を区間再生時間に合わせるように動きパターンデータ及び発光パターンデータを動き実行時間の時間軸に沿って伸張するように加工して曲調区間KB1乃至KB6に割り当てる。すなわち、制御部40は、このような場合、本来の可動部動きパターンが示す動きを、これよりもゆっくり動く可動部動きパターンに加工し、また本来の発光パターンが示す発光の変化を、これよりもゆっくり変化する発光パターンに加工している。因みに制御部40は、動き停止パターンデータや発光停止パターンデータについても、同様に音楽データの曲調区間KB1乃至KB6に対し適宜加工して割り当てている。
【0055】
従って制御部40は、音楽データの先頭から後尾の全ての曲調区間KB1乃至KB6に対し、それぞれ動きパターンデータや動き停止パターンデータ、発光パターンデータや発光停止パターンデータを時間的に間を空けることなく連続的に割り当てている。そして制御部40は、音楽データの先頭から後尾までの全ての曲調区間KB1乃至KB6に対しそれぞれ動きパターンデータや動き停止パターンデータ、発光パターンデータや発光停止パターンデータを割り当てると、当該全ての曲調区間KB1乃至KB6に割り当てて音楽の再生時間軸に沿って並ぶ、例えば筐体右側回動部22の動きパターンデータや動き停止パターンデータのデータ列を当該筐体右側回動部22に対する動きデータとする。このようにして制御部40は、1つの音楽データに基づく音楽が出力されている間、筐体右側回動部22を動かすための動きデータを得る。
【0056】
また制御部40は、同様にして、音楽データの全ての曲調区間KB1乃至KB6に割り当てて音楽の再生時間軸に沿って並ぶ、筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30及び左側車輪31それぞれの動きパターンデータや動き停止パターンデータのデータ列も、当該筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30及び左側車輪31の動きデータとする。このようにして制御部40は、1つの音楽データに基づく音楽が出力されている間、筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30及び左側車輪31それぞれを動かすための動きデータを得る。
【0057】
さらに制御部40は、同様にして、音楽データの全ての曲調区間KB1乃至KB6に割り当てて音楽の再生時間軸に沿って並ぶ、右側発光部34及び左側発光部35それぞれの発光パターンデータや発光停止パターンデータのデータ列を当該右側発光部34及び左側発光部35の発光データとする。これにより制御部40は、1つの音楽データに基づく音楽が出力されている間、右側発光部34及び左側発光部35それぞれを発光させるための発光データを得る。そして制御部40は、これら筐体右側回動部22、筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30、左側車輪31毎の動きデータと、右側発光部34、左側発光部35毎の発光データとをまとめて、1つ音楽データに基づく音楽に合わせて音楽ロボット装置11全体を動かすロボット動きデータとする。
【0058】
このようにして制御部40は、圧縮音楽データに対応するロボット動きデータを生成し得るようになされている。ところで制御部40は、例えばユーザにより入力部41を介して、単に圧縮音楽データが指定され、当該指定された圧縮音楽データを用いてロボット動きデータを生成するように要求する操作命令が入力されたときには、これに応じて生成したロボット動きデータを、記憶部42に対し圧縮音楽データに対応付けて記憶することができる。
【0059】
また制御部40は、音楽ロボット装置11に対し圧縮音楽データや音楽データのみを供給することもできる。しかしながら制御部40は、例えばユーザにより入力部41を介して、音楽ロボット装置11に再生させる音楽の圧縮音楽データが指定され、かつ当該指定された圧縮音楽データを用いてロボット動きデータを生成するように要求する要求命令が入力されたときには、記憶部42から指定された圧縮音楽データを読み出す。そして制御部40は、記憶部42から読み出している圧縮音楽データを再生処理しながら、その結果得られる音楽データを用いてロボット動きデータを生成する。
【0060】
この際、制御部40は、例えば音楽データを用いてロボット動きデータをその先頭から途中の所定部分まで生成すると、当該途中まで生成したロボット動きデータを先頭から所定単位毎に分割して通信部46から音楽ロボット装置11へ送信し始める。因みに制御部40は、ロボット動きデータを所定部分まで生成して音楽ロボット装置11への送信を開始すると、引き続きロボット動きデータの残りの部分を生成しながら、音楽ロボット装置11への送信を継続する。
【0061】
そして制御部40は、すでに音楽ロボット装置11に対しロボット動きデータの送信を開始している状態で、ユーザにより入力部41を介して音楽ロボット装置11へ圧縮音楽データを送信するように要求する操作命令が入力されると、これに応じて記憶部42から読み出している圧縮音楽データをそのまま又は再生処理して元の音楽データとしてストリーミング方式で通信部46を介して音楽ロボット装置11へ送信する。
【0062】
このようにして制御部40は、音楽ロボット装置11に対し圧縮音楽データや音楽データと共にロボット動きデータも供給し得るようになされている。因みに制御部40は、音楽ロボット装置11へロボット動きデータの先頭の所定単位部分を送信すると、その後は、音楽ロボット装置11から残りの所定単位部分が要求される毎に、これに応じてロボット動きデータを順次所定単位部分に分割して送信している。従って制御部40は、音楽ロボット装置11に対し圧縮音楽データや音楽データと共にロボット動きデータを供給する場合、通信負荷が増大することを回避している。
【0063】
さらに制御部40は、音楽ロボット装置11から再生する圧縮音楽データが通知され、その圧縮音楽データに対応するロボット動きデータが要求されると、これに応じて当該指示された圧縮音楽データを用いて上述と同様にロボット動きデータを生成する。そして制御部40は、かかるロボット動きデータを上述と同様に所定単位部分毎に通信部46を介して音楽ロボット装置11に送信することもできる。このようにして制御部40は、音楽ロボット装置11に対しロボット動きデータのみも供給し得るようになされている。
【0064】
因みに制御部40は、音楽ロボット装置11に送信するためにロボット動きデータを生成すると、例えばユーザ設定に応じて、記憶部42に対し当該ロボット動きデータを圧縮音楽データと対応付けて記憶することができる。また制御部40は、この際、例えばユーザ設定に応じて、ロボット動きデータを、音楽ロボット装置11に送信し終えた時点で破棄することもできる。そして制御部40は、記憶部42にロボット動きデータを記憶していると、音楽ロボット装置11に対し、そのロボット動きデータを供給するとき、改めてロボット動きデータを生成しなくても、記憶部42からそのロボット動きデータを読み出して通信部46から音楽ロボット装置11に送信することもできる。
【0065】
次いで図10を用いて、音楽ロボット装置11の回路構成について説明する。かかる音楽ロボット装置11は、当該音楽ロボット装置11全体を統括的に制御する、マイクロコンピュータ構成の主制御部50を有している。また音楽ロボット装置11は、可動部51としての筐体右側回動部22、筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30及び左側車輪31を駆動制御し、発光部52としての右側発光部34及び左側発光部35を制御する、マイクロコンピュータ構成の駆動制御部53も有している。さらに音楽ロボット装置11は、入力部54として、上述した接触検知センサ33と共に、楕円体状筐体20に生じる加速度を検出する加速度センサも有している。
【0066】
この場合、入力部54は、接触検知センサ33に対しユーザの指等が接触すると、当該指等が接触している間だけ接触検知信号を駆動制御部53に送出している。そして駆動制御部53は、入力部54から(実際には、接触検知センサ33から)接触検知信号が与えられると、その接触検知信号に応じて、接触検知センサ33に対する指等の接触状態(例えば、指先で軽くたたくような単独の接触や2回以上の連続的な接触、また指等が接触したままの状態等)を判別している。
【0067】
また入力部54は、加速度センサにより常時、楕円体状筐体20に生じる加速度を検出し、その検出結果を加速度検出信号として駆動制御部53に送出している。そして駆動制御部53は、入力部54から(実際には、加速度センサから)加速度検出信号が与えられると、その加速度検出信号に基づいて、楕円体状筐体20の状態(床の上に置かれて静止している状態やユーザにより手で持たれて所定方向へ振り動かされている状態等)も判別している。
【0068】
このようにして駆動制御部53は、入力部54から接触検知信号や加速度検出信号が入力されると、そのときの接触検知センサに対する指等の接触状態と楕円体状筐体20の状態との組み合せに応じて、ユーザによる音楽ロボット装置11への命令の入力の有無を判別すると共に、命令が入力されたときには、その命令の種類を判別している。そして駆動制御部53は、ユーザにより命令が入力されると、どのような命令が入力されたかを主制御部50へ通知している。因みに音楽ロボット装置11は、接触検知センサ33に対する指等の接触状態と楕円体状筐体20の状態との組み合せにより、圧縮音楽データの再生開始命令や、再生する圧縮音楽データの選択命令、パーソナルコンピュータ12に対しロボット動きデータを要求する要求命令等の種々の命令を入力させ得るようになされている。
【0069】
主制御部50は、駆動制御部53から種々の命令の入力が通知されると、内部メモリ又は記憶部55に予め記憶している基本プログラムやアプリケーションプログラム、音楽出力プログラム等の各種プログラムに従って各種処理を実行する。また主制御部50は、通信部56を介してパーソナルコンピュータ12と無線通信することで、当該パーソナルコンピュータ12を主体とし自己を従属的に機能させるようにして各種処理を実行し得るようにもなされている。
【0070】
これにより主制御部50は、パーソナルコンピュータ12から、記憶保持用の圧縮音楽データと、対応するデータ属性情報とが送信され、その圧縮音楽データとデータ属性情報とを通信部56によって受信すると、かかる圧縮音楽データとデータ属性情報とを対応付けて記憶部55に記憶する。ただし記憶部55は、記憶容量が比較的小さいことにより、パーソナルコンピュータ12の記憶部42に比べて、記憶可能な圧縮音楽データの数が格段的に少ない。
【0071】
また主制御部50は、記憶部55に対し、図8について上述した動きパターンデータベースMDBと同一のもの、又はその動きパターンデータベースMDBに登録している動きパターンデータや発光パターンデータを、音楽の特徴に応じた分類毎に少しずつ減らした動きパターンデータベースを記憶している。
【0072】
そして主制御部50は、例えば音楽ロボット装置11が床の上に置かれた状態で、ユーザにより記憶部55内の圧縮音楽データを再生するように命令されると、当該記憶部55から圧縮音楽データを読み出して再生処理しながら、その結果得られる元の音楽データを、デジタルアナログ変換器やアンプ、右スピーカ28及び左スピーカ29等でなる出力部57に送出する。これにより主制御部50は、音楽データに基づく音楽を右スピーカ28及び左スピーカ29から出力してユーザに聴かせることができる。
【0073】
ところで主制御部50は、このように音楽ロボット装置11が床の上に置かれた状態で、記憶部55から圧縮音楽データを読み出して再生処理するときには、かかる再生処理と並行して、当該圧縮音楽データを再生処理しながら得られる元の音楽データの分析処理と、ロボット動きデータを生成する動きデータ生成処理も実行している。実際に主制御部50は、記憶部55から圧縮音楽データを読み出して再生処理を開始すると、その結果得られる音楽データの分析処理としてビート検出処理と特徴解析処理とを同時並行に実行している。
【0074】
主制御部50は、圧縮音楽データの再生処理を実行している場合、ビート検出処理において、音楽データの所定の単位処理部分毎に音量レベルを検出しながら、当該検出した音量レベルを、予め設定された比較的大きい閾値と比較する。そして主制御部50は、その比較結果に基づき、音楽データにおいて音量レベルが閾値以上の位置を音楽のビートに相当するビート位置として順次検出する。これにより主制御部50は、音楽データをその先頭から後尾に渡り、所定数毎のビート位置を区切り位置とした例えば音楽の2/1小節や1小節、2小節に相当するような曲調区間に順次区切るようにする。また主制御部50は、この際、特徴解析処理において、音楽データの曲調区間毎に複数回検出した音量レベルをもとにして当該曲調区間に対応する区間特徴を検出する。
【0075】
さらに主制御部50は、動きデータ生成処理において、音楽データの先頭から後尾への曲調区間に対し、上述したパーソナルコンピュータ12の場合と同様にして、動きパターンデータや動き停止パターンデータ、発光パターンデータや発光停止パターンデータを割り当てるようにする。すなわち、主制御部50は、音楽データの曲調区間を再生する間、可動部51(すなわち、筐体右側回動部22、筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30及び左側車輪31)を駆動制御するための動きパターンデータを、記憶部55内の動きパターンデータベースから読み出した動きパターンデータに設定する。また主制御部50は、かかる曲調区間を再生する間、発光部52(すなわち、右側発光部34及び左側発光部35)を制御するための発光パターンデータを、記憶部55内の動きパターンデータベースから読み出した発光パターンデータに設定する。
【0076】
そして主制御部50は、音楽データの先頭から後尾にかけて順次1つの曲調区間に対する可動部51及び発光部52の動きパターンデータや動き停止パターンデータ、発光パターンデータや発光停止パターンデータを割り当てる毎に、当該1つの曲調区間に割り当てた動きパターンデータや動き停止パターンデータを、可動部51(すなわち、筐体右側回動部22、筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30、左側車輪31)を音楽の所定区間部分を出力する間に動かす(又は動きを停止させる)ための動きデータとする。また主制御部50は、1つの曲調区間に割り当てた発光パターンデータや発光停止パターンデータを、発光部52(すなわち、右側発光部34、左側発光部35)を音楽の所定区間部分を出力する間に発光させる(又は発光を停止させる)ための発光データとする。
【0077】
さらに主制御部50は、音楽データの1つの曲調区間に割り当てた全ての動きデータ及び発光データをまとめて、当該1つの曲調区間に相当する音楽の所定区間部分を出力する間に音楽ロボット装置11全体を動かすためのロボット動きデータとする。このようにして主制御部50は、音楽データの順次1つの曲調区間に対応するロボット動きデータを生成し、かかるロボット動きデータを音楽の再生時間軸に沿った並びを維持して駆動制御部53に送出する。
【0078】
これにより駆動制御部53は、主制御部50から与えられたロボット動きデータに含まれる筐体右側回動部22、筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30及び左側車輪31それぞれの動きデータに基づいて、対応する筐体右側回動部22、筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30及び左側車輪31を駆動制御する。また駆動制御部53は、かかるロボット動きデータに含まれる右側発光部34及び左側発光部35それぞれの発光データに基づいて、対応する右側発光部34及び左側発光部35を制御する。
【0079】
このようにして駆動制御部53は、音楽データの順次1つの曲調区間に相当する音楽の所定区間部分が出力される間、動きデータに基づいて筐体右側回動部22、筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30及び左側車輪31をそれぞれ所望の可動部動きパターンで動かし又は動きを停止させる。また駆動制御部53は、音楽データの順次1つの曲調区間に相当する音楽の所定区間部分が出力される間、発光データに基づいて右側発光部34及び左側発光部35をそれぞれ所望の発光パターンで発光させ又は発光を停止させる。
【0080】
ところで主制御部50は、音楽データに対する分析処理としてビート検出処理及び特徴解析処理を実行する場合、上述したパーソナルコンピュータ12のように音楽データに対し複雑な処理を何ら施すことなく、音楽データの音量レベルを検出するような簡易な処理によりビート位置を検出し、また区間特徴を検出している。従って主制御部50は、パーソナルコンピュータ12に比べて、ロボット動きデータを、処理負荷の増加を抑えてかつ比較的短時間に生成している。
【0081】
しかしながら主制御部50は、記憶部55から読み出した圧縮音楽データを再生処理して出力部57へ送出する音楽データを生成している。そして主制御部50は、その再生処理により得た音楽データをさらに用いて分析処理と共に動きデータ生成処理を実行することで駆動制御部53へ送出するロボット動きデータを生成している。すなわち、主制御部50は、記憶部55から圧縮音楽データを読み出したとき、出力部57へ送出する音楽データの先頭部分を得た時点から、僅かながら時間的に遅れて、駆動制御部53へ送出する先頭のロボット動きデータを得ている。
【0082】
従って主制御部50は、記憶部55から読み出している圧縮音楽データを再生処理しながら、その結果得られる音楽データを一旦、内部のバッファ(以下、これを単にバッファと呼ぶ)に一時記憶している。これにより主制御部50は、出力部57への音楽データの送出開始を遅延させている。また主制御部50は、音楽データの順次1つの曲調区間に対応するロボット動きデータを生成する毎に、かかるロボット動きデータも一旦、バッファに一時記憶している。従って主制御部50は、出力部57への音楽データの送出開始と共に駆動制御部53へのロボット動きデータの送出開始も遅延させている。
【0083】
そして主制御部50は、出力部57への音楽データの送出開始を予め設定された所定の遅延時間だけ遅延させると共に、当該出力部57への音楽データの送出開始の遅延に合わせて駆動制御部53へのロボット動きデータの送出開始も遅延させている。因みに、かかる遅延時間は、例えばバッファに対する音楽データの一時記憶の開始時点から、バッファに所定個数分の曲調区間に対応するロボット動きデータを一時記憶し得る時点までの所定時間に選定されている。
【0084】
従って主制御部50は、バッファに対する音楽データの一時記憶の開始時点から出力部57への音楽データの送出開始を遅延時間だけ遅延させる。そして主制御部50は、バッファに対する音楽データの一時記憶の開始時点から遅延時間に達したタイミングで当該バッファから音楽データを読み出して出力部57への送出を開始すると共に、そのバッファからロボット動きデータも読み出すようにして駆動制御部53への送出を開始する。このようにして主制御部50は、出力部57(すなわち、右スピーカ28及び左スピーカ29)からの音楽の出力タイミングを制御すると共に、駆動制御部53に対しロボット動きデータに基づく可動部51の駆動制御及び発光部52の制御の開始タイミングも制御する。
【0085】
これにより主制御部50は、出力部57からの音楽の出力開始に同期させて、可動部51の駆動制御と発光部52の制御とを同時に開始させている。従って主制御部50は、出力部57から1曲の音楽を出力している間、当該音楽の曲調に同期させて可動部51を順次所定の可動部動きパターンで動かし、また発光部52を順次所定の発光パターンで発光させ得るようになされている。かくして主制御部50は、記憶部55に圧縮音楽データとして記憶していた音楽をユーザに聴かせながら、その音楽に合わせて、あたかも音楽ロボット装置11全体を踊っているかのように動かしてユーザに見せることができる。
【0086】
ところで主制御部50は、例えば音楽ロボット装置11がユーザにより手で持たれた状態で、記憶部55内の圧縮音楽データを再生するように命令されたときには、ロボット動きデータを特には生成せずに、その圧縮音楽データを再生処理し、その結果得られる音楽データを出力部57に送出する。これにより主制御部50は、この際、可動部51を特には動かさずに、ユーザに対し手に音楽ロボット装置11を安定して保持させながら、右スピーカ28及び左スピーカ29から音楽を出力してユーザに聴かせることができる。
【0087】
また主制御部50は、このように音楽ロボット装置11がユーザにより手で持たれた状態で、再生する圧縮音楽データを切り替えるように命令されると、これに応じて再生する圧縮音楽データを切り替えることによりユーザに聴かせる音楽を切り替える。これにより主制御部50は、ユーザに対し所望の音楽を選択させることができる。
【0088】
そして主制御部50は、例えば音楽ロボット装置11が再び床の上に置かれた状態で、ユーザによりパーソナルコンピュータ12からロボット動きデータを取得するように命令されると、その直前にユーザにより選択されていた音楽の圧縮音楽データに対応するデータ識別情報(すなわち、圧縮音楽データに対応するデータ属性情報に含まれている)を記憶部55から読み出す。これにより主制御部50は、そのデータ識別情報(すなわち、再生する圧縮音楽データを通知するためのものである)と共に、ロボット動きデータを要求する動きデータ要求情報を通信部56からパーソナルコンピュータ12に送信する。
【0089】
その結果、主制御部50は、パーソナルコンピュータ12からデータ識別情報で識別された圧縮音楽データ(すなわち、ユーザにより選択された音楽の圧縮音楽データ)に対応するロボット動きデータ(この場合、音楽データ全体に対応するロボット動きデータである)の所定単位部分が送信されると、そのロボット動きデータの所定単位部分を、通信部56により受信してバッファに一時記憶する。この状態で主制御部50は、記憶部55からユーザにより選択された圧縮音楽データを読み出して再生処理を開始する。そして主制御部50は、記憶部55から読み出している圧縮音楽データを再生処理しながら音楽データを得ると、このときには当該音楽データを特に遅延はさせずに出力部57へ送出する。また主制御部50は、出力部57への音楽データの送出を開始したタイミングでバッファからロボット動きデータの所定単位部分を読み出すようにして駆動制御部53への送出を開始する。
【0090】
このようにして主制御部50は、パーソナルコンピュータ12からロボット動きデータを取得したときにも、出力部57からの音楽の出力タイミングを制御すると共に、駆動制御部53に対しロボット動きデータに基づく可動部51の駆動制御及び発光部52の制御の開始タイミングも制御する。これにより主制御部50は、出力部57からの音楽の出力開始に同期させて、駆動制御部53に対し可動部51の駆動制御及び発光部52の制御を開始させている。
【0091】
ところで主制御部50は、バッファに一時記憶していたロボット動きデータの所定単位部分をある程度、駆動制御部53へ送出し終えると、通信部56を介してパーソナルコンピュータ12に対し、ロボット動きデータの次の所定単位部分を要求する。そして主制御部50は、かかる要求に応じてパーソナルコンピュータ12からロボット動きデータの次の所定単位部分が送信されると、これを通信部56により受信してバッファに一時記憶する。
【0092】
これにより主制御部50は、バッファからロボット動きデータの先に取得していた所定単位部分を全て読み出して駆動制御部53へ送出し終えると、引き続きバッファからロボット動きデータの次に取得した所定単位部分を読み出し始めて駆動制御部53へ送出する。このようにして主制御部50は、音楽の出力時にパーソナルコンピュータ12から供給されるロボット動きデータを利用するときには、バッファに一時記憶しているロボット動きデータの所定単位部分をある程度、駆動制御部53へ送出し終える毎に、パーソナルコンピュータ12からロボット動きデータの次の所定単位部分を取得する。従って主制御部50は、圧縮音楽データを再生処理しながら出力部57から音楽を出力している間は、駆動制御部53に対しロボット動きデータをとぎれることなく送出して可動部51を連続的に駆動制御させると共に発光部52も連続的に制御させ、かくして音楽ロボット装置11全体をあたかも音楽に合わせて踊っているかのように動かすことができる。
【0093】
さらに主制御部50は、パーソナルコンピュータ12から圧縮音楽データのみが供給される場合、当該パーソナルコンピュータ12から圧縮音楽データがストリーミング方式で送信されると、通信部56により、その圧縮音楽データの受信を開始する。そして主制御部50は、通信部56により受信されている圧縮音楽データを再生処理しながら、その結果得られる音楽データを一旦、バッファに一時記憶する。また主制御部50は、このとき圧縮音楽データを再生処理して得られる音楽データを用いて上述と同様に分析処理及び動きデータ生成処理を実行する。これにより主制御部50は、音楽データの順次1つの曲調区間に対応するロボット動きデータを生成し、当該生成したロボット動きデータも一旦、バッファに一時記憶する。
【0094】
この際にも、主制御部50は、上述したように記憶部55から圧縮音楽データを読み出したときと同様に、バッファに対する音楽データの一時記憶の開始時点から出力部57への音楽データの送出開始を遅延時間だけ遅延させる。そして主制御部50は、バッファに対する音楽データの一時記憶の開始時点から遅延時間に達したタイミングで当該バッファから音楽データを読み出して出力部57への送出を開始すると共に、そのバッファからロボット動きデータも読み出すようにして駆動制御部53への送出を開始する。これにより主制御部50は、出力部57からの音楽の出力開始に同期させて、可動部51の駆動制御と発光部52の制御とを同時に開始させる。
【0095】
従って主制御部50は、パーソナルコンピュータ12から圧縮音楽データが供給されたときにも、出力部57から1曲の音楽を出力している間、当該音楽の曲調に同期させて可動部51を順次所定の可動部動きパターンで動かし、また発光部52を順次所定の発光パターンで発光させ得るようになされている。これにより主制御部50は、パーソナルコンピュータ12から供給された圧縮音楽データに基づく音楽をユーザに聴かせながら、その音楽に合わせて、あたかも音楽ロボット装置11全体を踊っているかのように動かしてユーザに見せることができる。
【0096】
さらに主制御部50は、パーソナルコンピュータ12から音楽データ(すなわち、圧縮音楽データをすでに再生処理して得られた音楽データ)のみが供給される場合、当該パーソナルコンピュータ12から音楽データがストリーミング方式で送信されると、通信部56により、その音楽データの受信を開始する。そして主制御部50は、通信部56により受信されている音楽データを一旦、バッファに一時記憶する。また主制御部50は、このとき通信部56により受信されている音楽データを用いて上述と同様に分析処理及び動きデータ生成処理を実行する。これにより主制御部50は、音楽データの順次1つの曲調区間に対応するロボット動きデータを生成し、当該生成したロボット動きデータも一旦、バッファに一時記憶する。
【0097】
この際にも、主制御部50は、上述したように記憶部55から圧縮音楽データを読み出したときと同様に、バッファに対する音楽データの一時記憶の開始時点から出力部57への音楽データの送出開始を遅延時間だけ遅延させる。そして主制御部50は、バッファに対する音楽データの一時記憶の開始時点から遅延時間に達したタイミングで当該バッファから音楽データを読み出して出力部57への送出を開始すると共に、そのバッファからロボット動きデータも読み出すようにして駆動制御部53への送出を開始する。これにより主制御部50は、出力部57からの音楽の出力開始に同期させて、可動部51の駆動制御と発光部52の制御とを同時に開始させる。
【0098】
従って主制御部50は、パーソナルコンピュータ12から音楽データが供給されたときにも、出力部57から1曲の音楽を出力している間、当該音楽の曲調に同期させて可動部51を順次所定の可動部動きパターンで動かし、また発光部52を順次所定の発光パターンで発光させ得るようになされている。これにより主制御部50は、パーソナルコンピュータ12から供給された音楽データに基づく音楽をユーザに聴かせながら、その音楽に合わせて、あたかも音楽ロボット装置11全体を踊っているかのように動かしてユーザに見せることができる。
【0099】
さらに主制御部50は、パーソナルコンピュータ12から圧縮音楽データと共にロボット動きデータが供給される場合、まずパーソナルコンピュータ12からロボット動きデータの先頭の所定単位部分が送信されると、そのロボット動きデータの所定単位部分を通信部56により受信してバッファに一時記憶する。また主制御部50は、引き続きパーソナルコンピュータ12から圧縮音楽データがストリーミング方式で送信されると、通信部56によりその圧縮音楽データの受信を開始する。そして主制御部50は、通信部56により受信されている圧縮音楽データを再生処理しながら音楽データを得ると、このときには当該音楽データを特に遅延はさせずに出力部57へ送出する。また主制御部50は、出力部57への音楽データの送出を開始したタイミングでバッファからロボット動きデータの所定単位部分を読み出すようにして駆動制御部53への送出を開始する。
【0100】
このようにして主制御部50は、パーソナルコンピュータ12から圧縮音楽データと共にロボット動きデータが供給されたときにも、出力部57からの音楽の出力タイミングを制御すると共に、駆動制御部53に対しロボット動きデータに基づく可動部51の駆動制御及び発光部52の制御の開始タイミングも制御する。これにより主制御部50は、出力部57からの音楽の出力開始に同期させて、駆動制御部53に対し可動部51の駆動制御及び発光部52の制御を開始させている。
【0101】
因みに主制御部50は、パーソナルコンピュータ12から圧縮音楽データと共にロボット動きデータが供給されたときにも、バッファに一時記憶していたロボット動きデータの所定単位部分をある程度、駆動制御部53へ送出し終える毎に、パーソナルコンピュータ12からロボット動きデータの次の所定単位部分を取得している。従って主制御部50は、圧縮音楽データを再生処理しながら出力部57から音楽を出力している間は、駆動制御部53に対しロボット動きデータをとぎれることなく送出して可動部51を連続的に駆動制御させると共に発光部52も連続的に制御させ、かくして音楽ロボット装置11全体をあたかも音楽に合わせて踊っているかのように動かすことができる。
【0102】
さらに主制御部50は、パーソナルコンピュータ12から音楽データと共にロボット動きデータが供給される場合、まずパーソナルコンピュータ12からロボット動きデータの先頭の所定単位部分が送信されると、そのロボット動きデータの所定単位部分を通信部56により受信してバッファに一時記憶する。また主制御部50は、引き続きパーソナルコンピュータ12から音楽データがストリーミング方式で送信されると、通信部56によりその音楽データを受信しながら、特には遅延させずに出力部57へ送出する。そして主制御部50は、通信部56により受信している音楽データの出力部57への送出を開始したタイミングで、バッファからロボット動きデータの所定単位部分を読み出すようにして駆動制御部53への送出を開始する。
【0103】
このようにして主制御部50は、パーソナルコンピュータ12から音楽データと共にロボット動きデータが供給されたときにも、出力部57からの音楽の出力タイミングを制御すると共に、駆動制御部53に対しロボット動きデータに基づく可動部51の駆動制御及び発光部52の制御の開始タイミングも制御する。これにより主制御部50は、出力部57からの音楽の出力開始に同期させて、駆動制御部53に対し可動部51の駆動制御及び発光部52の制御を開始させている。
【0104】
因みに主制御部50は、パーソナルコンピュータ12から音楽データと共にロボット動きデータが供給されたときにも、バッファに一時記憶していたロボット動きデータの所定単位部分をある程度、駆動制御部53へ送出し終える毎に、パーソナルコンピュータ12からロボット動きデータの次の所定単位部分を取得している。従って主制御部50は、出力部57から音楽データを音楽として出力している間は、駆動制御部53に対しロボット動きデータをとぎれることなく送出して可動部51を連続的に駆動制御させると共に発光部52も連続的に制御させ、かくして音楽ロボット装置11全体をあたかも音楽に合わせて踊っているかのように動かすことができる。
【0105】
なお、この実施の形態の場合、音楽ロボット装置11の主制御部50は、音楽の出力時にロボット動きデータを生成し、又はパーソナルコンピュータ12からロボット動きデータの供給を受けて可動部51を駆動制御し発光部52を制御しても、当該音楽の出力が終了すると、その都度、ロボット動きデータを破棄している。これにより主制御部50は、記憶部55を圧縮音楽データの記憶に対し有効に利用している。
【0106】
次いで、図11乃至図13に示すフローチャートを用いて、主制御部50が記憶部55から圧縮音楽データを読み出したときや、パーソナルコンピュータ12から圧縮音楽データや音楽データが供給されたときに、同時並行で実行する音楽データの分析処理におけるビート検出処理手順RT1及び特徴解析処理手順RT2と、動きデータ生成処理手順RT3について説明する。
【0107】
主制御部50は、圧縮音楽データの再生処理を開始し、またパーソナルコンピュータ12から送信された音楽データの受信を開始すると、音楽出力プログラムに従って図11に示すビート検出処理手順RT1を開始する。主制御部50は、かかるビート検出処理手順RT1を開始すると、ステップSP1において、音楽データの所定の単位処理部分毎に音量レベルを検出し、その検出結果に基づき音楽データのビート位置を検出して、次のステップSP2に移る。ステップSP2において主制御部50は、音楽データに対し所定数のビート位置を検出したか否かを判別する。このステップSP2において否定結果が得られると、このことは音楽データにおいて曲調区間を特定するための所定数のビート位置を未だ検出してはいないことを表している。
【0108】
従って主制御部50は、かかる否定結果を得ると、ステップSP1に戻る。これにより主制御部50は、この後、ステップSP2において肯定結果を得るまでの間、ステップSP1及びステップSP2の処理を循環的に繰り返し実行する。従って主制御部50は、音楽データにおいてその先頭から順次ビート位置を検出する。
【0109】
そしてステップSP2において肯定結果が得られると、このことは音楽データにおいて曲調区間を特定するための所定数のビート位置を検出したことを表している。従って主制御部50は、かかる肯定結果を得ると、ビート位置の検出数を一旦リセットして、音楽データに対する次の曲調区間を検出し得るようにした後、次のステップSP3に移る。ステップSP3において主制御部50は、音楽データ内で所定数のビート位置に基づき1つの曲調区間を区切り、次のステップSP4に移る。ステップSP4において主制御部50は、音楽データ全体に渡る曲調区間の区切りが完了したか否かを判別する。このステップSP4において否定結果が得られると、このことは音楽データの途中までしか曲調区間を区切っていないことを表している。
【0110】
従って主制御部50は、かかる否定結果を得ると、ステップSP1に戻る。これにより主制御部50は、この後、ステップSP4において肯定結果を得るまでの間、ステップSP1乃至ステップSP4の処理を循環的に繰り返し実行する。従って主制御部50は、音楽データをその先頭から順次ビート位置を検出しながら順次曲調区間に区切る。そしてステップSP4において肯定結果が得られると、このことは音楽データを全体に渡り複数の曲調区間に区切ったことを表している。従って主制御部50は、かかる肯定結果を得ると、次のステップSP5に移り、かかるビート検出処理手順RT1を終了する。
【0111】
また主制御部50は、圧縮音楽データの再生処理し、またパーソナルコンピュータ12から送信された音楽データの受信を開始すると、音楽出力プログラムに従って図12に示す特徴解析処理手順RT2を開始する。主制御部50は、かかる特徴解析処理手順RT2を開始すると、ステップSP11において、ビート検出処理により音楽データ内で1つの曲調区間を区切ることを待ち受ける。そして主制御部50は、ビート検出処理により音楽データ内で1つの曲調区間を区切ると、次のステップSP12に移る。ステップSP12において主制御部50は、1つの曲調区間内で複数回検出した音量レベルに基づき当該1つの曲調区間に対応する区間特徴を検出して、次のステップSP13に移る。
【0112】
ステップSP13において主制御部50は、音楽データの全ての曲調区間に対して区間特徴を検出したか否かを判別する。このステップSP13において否定結果が得られると、このことは音楽データを途中までしか曲調区間に区切っていないことを表している。従って主制御部50は、かかる否定結果を得ると、ステップSP11に戻る。これにより主制御部50は、この後、ステップSP13において肯定結果を得るまでの間、ステップSP11乃至ステップSP13の処理を循環的に繰り返し実行する。従って主制御部50は、音楽データの先頭から順次区切られる曲調区間に対し区間特徴を検出する。
【0113】
そしてステップSP13において肯定結果が得られると、このことは音楽データを全体に渡り複数の曲調区間に区切り、これら複数の曲調区間に対し区間特徴を検出したことを表している。従って主制御部50は、かかる肯定結果を得ると、次のステップSP14に移り、かかる特徴解析処理手順RT2を終了する。
【0114】
さらに主制御部50は、圧縮音楽データの再生処理し、またパーソナルコンピュータ12から送信された音楽データの受信を開始すると、音楽出力プログラムに従って図13に示す動きデータ生成処理手順RT3を開始する。主制御部50は、かかる動きデータ生成処理手順RT3を開始すると、ステップSP21において音楽データ内で1つの曲調区間を区切り、かつその曲調区間に対する区間特徴を検出することを待ち受ける。そして主制御部50は、音楽データ内で1つの曲調区間を区切り、かつその曲調区間に対する区間特徴を検出すると、次のステップSP22に移る。
【0115】
ステップSP22において主制御部50は、音楽データ内で区切った1つの曲調区間に対し、その区間特徴に基づき可動部51の動きパターンデータを割り当てると共に、発光部52の発光パターンデータを割り当てる。そして主制御部50は、1つの曲調区間に割り当てた動きパターンデータ及び発光パターンデータをまとめてロボット動きデータを生成して、次のステップSP23に移る。
【0116】
ステップSP23において主制御部50は、音楽データの全ての曲調区間に対応するロボット動きデータを生成したか否かを判別する。このステップSP23において否定結果が得られると、このことは音楽データを途中までしか曲調区間に区切っていないことを表している。従って主制御部50は、かかる否定結果を得ると、ステップSP21に戻る。これにより主制御部50は、この後、ステップSP23において肯定結果を得るまでの間、ステップSP21乃至ステップSP23の処理を循環的に繰り返し実行する。従って主制御部50は、音楽データの先頭から後尾までの複数の曲調区間に対応するロボット動きデータを順次生成する。
【0117】
そしてステップSP23において肯定結果が得られると、このことは音楽データ全体の複数の曲調区間に対応するロボット動きデータを生成し終えたことを表している。従って主制御部50は、かかる肯定結果を得ると、次のステップSP24に移り、かかる動きデータ生成処理手順RT3を終了する。
【0118】
次いで図14に示すフローチャートを用いて、主制御部50がユーザの再生要求に応じて記憶部55から圧縮音楽データを読み出すときに実行する第1の音楽出力処理手順RT4について説明する。主制御部50は、記憶部55から圧縮音楽データの読み出しを開始すると、これに応じて音楽出力プログラムに従い図14に示す第1の音楽出力処理手順RT4を開始する。主制御部50は、かかる第1の音楽出力処理手順RT4を開始すると、ステップSP31において記憶部55から読み出している圧縮音楽データの再生処理を開始して、次のステップSP32及びステップSP33に移り2種類の処理を並行に実行する。
【0119】
ステップSP32において主制御部50は、圧縮音楽データを再生処理して得られる音楽データをバッファに一時記憶し始めて、次のステップSP34に移る。またステップSP33において主制御部50は、圧縮音楽データを再生処理しながら得られる音楽データを用いて上述した分析処理のビート検出処理手順RT1及び特徴解析処理手順RT2と、動きデータ生成処理手順RT3とを開始して、次のステップSP35に移る。そしてステップSP35において主制御部50は、ビート検出処理手順RT1及び特徴解析処理手順RT2と動きデータ生成処理手順RT3とを実行して生成した曲調区間に対応するロボット動きデータをバッファに一時記憶し始めて、次のステップSP34に移る。
【0120】
ステップSP34において主制御部50は、バッファへの音楽データの一時記憶を開始した時点から所定の遅延時間に達することを待ち受け、当該遅延時間に達すると、次のステップSP36に移る。ステップSP36において主制御部50は、バッファから音楽データを読み出して出力部57への送出を開始すると共に、当該バッファからロボット動きデータを読み出して駆動制御部53への送出を開始して、次のステップSP37に移る。
【0121】
ステップSP37において主制御部50は、出力部57から音楽データに基づく音楽を出力しながら、駆動制御部53により可動部51を駆動制御させると共に、発光部52を制御させて、次のステップSP38に移る。そしてステップSP38において主制御部50は、出力部57からの音楽の出力が終了したか否かを判別する。このステップSP38において否定結果が得られると、このことはバッファに対し、未だ音楽データとロボット動きデータとが溜まっていることを表している。従って主制御部50は、かかる否定結果を得ると、ステップSP37に戻る。
【0122】
これにより主制御部50は、この後、ステップSP38において肯定結果を得るまでの間、ステップSP37及びステップSP38の処理を循環的に繰り返し実行する。従って主制御部50は、出力部57から1曲の音楽を連続的に出力しながら、駆動制御部53により可動部51を駆動制御させると共に、発光部52を制御させる。そしてステップSP38において肯定結果が得られると、このことは出力部57からの1曲の音楽の出力が終了し、かつ駆動制御部53により可動部51の駆動制御と発光部52の制御も合わせて終了したことを表している。従って主制御部50は、かかる肯定結果を得ると、次のステップSP39に移り、かかる第1の音楽出力処理手順RT4を終了する。
【0123】
次いで、図15に示すフローチャートを用いて、パーソナルコンピュータ12からロボット動きデータを取得するときに実行する第2の音楽出力処理手順RT5について説明する。主制御部50は、ユーザにより所望の音楽が選択された状態で当該音楽に対応するロボット動きデータをパーソナルコンピュータ12に要求するように命令されると、音楽出力プログラムに従って図15に示す第2の音楽出力処理手順RT5を開始する。主制御部50は、かかる第2の音楽出力処理手順RT5を開始すると、ステップSP41においてユーザにより選択された音楽に対応するデータ識別情報と共に動きデータ要求情報を通信部56からパーソナルコンピュータ12に送信して、次のステップSP42に移る。
【0124】
ステップSP42において主制御部50は、パーソナルコンピュータ12から送信されるロボット動きデータの所定単位部分の受信を待ち受ける。そしてステップSP42において主制御部50は、通信部56により、パーソナルコンピュータ12から送信されたロボット動きデータの所定単位部分の受信が開始されると、次のステップSP43に移る。ステップSP43において主制御部50は、バッファへのロボット動きデータの一時記憶を開始して、実際に通信部56により受信されたロボット動きデータの所定単位部分をバッファへ一時記憶し、次のステップSP44に移る。
【0125】
ステップSP44において主制御部50は、記憶部55からユーザにより選択された音楽に対応する圧縮音楽データを読み出して再生処理を開始し、次のステップSP45に移る。ステップSP45において主制御部50は、記憶部55から読み出している圧縮音楽データを再生処理しながら、その結果得られる音楽データの出力部57への送出を開始すると共に、当該出力部57への音楽データの送出を開始したタイミングでバッファからロボット動きデータの所定単位部分を読み出すようにして駆動制御部53への送出を開始して、次のステップSP46に移る。
【0126】
ステップSP46において主制御部50は、出力部57から音楽データに基づく音楽を出力しながら、駆動制御部53により可動部51を駆動制御させると共に、発光部52を制御させて、次のステップSP47に移る。そしてステップSP47において主制御部50は、出力部57からの音楽の出力が終了したか否かを判別する。このステップSP47において否定結果が得られると、このことは主制御部50が未だ記憶部55から読み出している圧縮音楽データを再生処理しながら、その結果得られる音楽データを出力部57に送出していることを表している。従って主制御部50は、かかる否定結果を得ると、ステップSP46に戻る。
【0127】
これにより主制御部50は、この後、ステップSP47において肯定結果を得るまでの間、ステップSP46及びステップSP47の処理を循環的に繰り返し実行する。従って主制御部50は、出力部57から1曲の音楽を連続的に出力しながら、駆動制御部53により可動部51を駆動制御させると共に、発光部52を制御させる。そしてステップSP47において肯定結果が得られると、このことは出力部57からの1曲の音楽の出力が終了し、かつ駆動制御部53により可動部51の駆動制御と発光部52の制御も合わせて終了したことを表している。従って主制御部50は、かかる肯定結果を得ると、次のステップSP48に移り、かかる第2の音楽出力処理手順RT5を終了する。
【0128】
次いで図16に示すフローチャートを用いて、パーソナルコンピュータ12から圧縮音楽データが供給されるときに実行する第3の音楽出力処理手順RT6について説明する。主制御部50は、パーソナルコンピュータ12と通信接続すると、音楽出力プログラムに従い図16に示す第3の音楽出力処理手順RT6を開始する。主制御部50は、かかる第3の音楽出力処理手順RT6を開始すると、ステップSP51においてパーソナルコンピュータ12から送信される圧縮音楽データの受信を待ち受ける。そしてステップSP51において主制御部50は、通信部56により、パーソナルコンピュータ12から送信された圧縮音楽データの受信が開始されると、次のステップSP52に移る。
【0129】
ステップSP52において主制御部50は、通信部56により受信されている圧縮音楽データの再生処理を開始して、次のステップSP53及びステップSP54に移り2種類の処理を並行に実行する。ステップSP53において主制御部50は、圧縮音楽データを再生処理して得られる音楽データをバッファに一時記憶し始めて、次のステップSP55に移る。またステップSP54において主制御部50は、圧縮音楽データを再生処理して得られる音楽データを用いて上述した分析処理のビート検出処理手順RT1及び特徴解析処理手順RT2と、動きデータ生成処理手順RT3とを開始して、次のステップSP56に移る。そしてステップSP56において主制御部50は、ビート検出処理手順RT1及び特徴解析処理手順RT2と動きデータ生成処理手順RT3とを実行して生成した曲調区間に対応するロボット動きデータをバッファに一時記憶し始めて、次のステップSP55に移る。
【0130】
ステップSP55において主制御部50は、バッファへの音楽データの一時記憶を開始した時点から所定の遅延時間に達することを待ち受け、当該遅延時間に達すると、次のステップSP57に移る。ステップSP57において主制御部50は、バッファから音楽データを読み出して出力部57への送出を開始すると共に、当該バッファからロボット動きデータを読み出して駆動制御部53への送出を開始して、次のステップSP58に移る。
【0131】
ステップSP58において主制御部50は、出力部57から音楽データに基づく音楽を出力しながら、駆動制御部53により可動部51を駆動制御させると共に、発光部52を制御させて、次のステップSP59に移る。そしてステップSP59において主制御部50は、出力部57からの音楽の出力が終了したか否かを判別する。このステップSP59において否定結果が得られると、このことは主制御部50のバッファに対し、未だ音楽データとロボット動きデータとが溜まっていることを表している。従って主制御部50は、かかる否定結果を得ると、ステップSP58に戻る。
【0132】
これにより主制御部50は、この後、ステップSP59において肯定結果を得るまでの間、ステップSP58及びステップSP59の処理を循環的に繰り返し実行する。従って主制御部50は、出力部57から1曲の音楽を連続的に出力しながら、駆動制御部53により可動部51を駆動制御させると共に、発光部52を制御させる。そしてステップSP59において肯定結果が得られると、このことは出力部57からの1曲の音楽の出力が終了し、かつ駆動制御部53により可動部51の駆動制御と発光部52の制御も合わせて終了したことを表している。従って主制御部50は、かかる肯定結果を得ると、次のステップSP60に移り、かかる第3の音楽出力処理手順RT6を終了する。
【0133】
次いで図17に示すフローチャートを用いて、パーソナルコンピュータ12から音楽データが供給されるときに実行する第4の音楽出力処理手順RT7について説明する。主制御部50は、パーソナルコンピュータ12と通信接続すると、音楽出力プログラムに従い図17に示す第4の音楽出力処理手順RT7を開始する。主制御部50は、かかる第4の音楽出力処理手順RT7を開始すると、ステップSP61においてパーソナルコンピュータ12から送信される音楽データの受信を待ち受ける。そしてステップSP61において主制御部50は、通信部56により、パーソナルコンピュータ12から送信された音楽データの受信が開始されると、次のステップSP62及びステップSP63に移り2種類の処理を並行に実行する。
【0134】
ステップSP62において主制御部50は、通信部56により受信されている音楽データをバッファに一時記憶し始めて、次のステップSP64に移る。またステップSP63において主制御部50は、通信部56により受信されている音楽データを用いて上述した分析処理のビート検出処理手順RT1及び特徴解析処理手順RT2と、動きデータ生成処理手順RT3とを開始して、次のステップSP65に移る。そしてステップSP65において主制御部50は、ビート検出処理手順RT1及び特徴解析処理手順RT2と動きデータ生成処理手順RT3とを実行して生成した曲調区間に対応するロボット動きデータをバッファに一時記憶し始めて、次のステップSP64に移る。
【0135】
ステップSP64において主制御部50は、バッファへの音楽データの一時記憶を開始した時点から所定の遅延時間に達することを待ち受け、当該遅延時間に達すると、次のステップSP66に移る。ステップSP66において主制御部50は、バッファから音楽データを読み出して出力部57への送出を開始すると共に、当該バッファからロボット動きデータを読み出して駆動制御部53への送出を開始して、次のステップSP67に移る。
【0136】
ステップSP67において主制御部50は、出力部57から音楽データに基づく音楽を出力しながら、駆動制御部53により可動部51を駆動制御させると共に、発光部52を制御させて、次のステップSP68に移る。そしてステップSP68において主制御部50は、出力部57からの音楽の出力が終了したか否かを判別する。このステップSP68において否定結果が得られると、このことは主制御部50のバッファに対し、未だ音楽データとロボット動きデータとが溜まっていることを表している。従って主制御部50は、かかる否定結果を得ると、ステップSP67に戻る。
【0137】
これにより主制御部50は、この後、ステップSP68において肯定結果を得るまでの間、ステップSP67及びステップSP68の処理を循環的に繰り返し実行する。従って主制御部50は、出力部57から1曲の音楽を連続的に出力しながら、駆動制御部53により可動部51を駆動制御させると共に、発光部52を制御させる。そしてステップSP68において肯定結果が得られると、このことは出力部57からの1曲の音楽の出力が終了し、かつ駆動制御部53により可動部51の駆動制御と発光部52の制御も合わせて終了したことを表している。従って主制御部50は、かかる肯定結果を得ると、次のステップSP69に移り、かかる第4の音楽出力処理手順RT7を終了する。
【0138】
次いで図18に示すフローチャートを用いて、パーソナルコンピュータ12から圧縮音楽データと共にロボット動きデータが供給されるときに実行する第5の音楽出力処理手順RT8について説明する。主制御部50は、パーソナルコンピュータ12と通信接続すると、音楽出力プログラムに従い図18に示す第5の音楽出力処理手順RT8を開始する。主制御部50は、かかる第5の音楽出力処理手順RT8を開始すると、ステップSP71においてパーソナルコンピュータ12から送信されるロボット動きデータの所定単位部分の受信を待ち受ける。そしてステップSP71において主制御部50は、通信部56により、パーソナルコンピュータ12から送信されたロボット動きデータの所定単位部分の受信が開始されると、次のステップSP72に移る。
【0139】
ステップSP72において主制御部50は、バッファへのロボット動きデータの一時記憶を開始して、実際に通信部56により受信されたロボット動きデータの所定単位部分をバッファへ一時記憶し、次のステップSP73に移る。ステップSP73において主制御部50は、パーソナルコンピュータ12から送信される圧縮音楽データの受信を待ち受ける。そしてステップSP73において主制御部50は、通信部56により、パーソナルコンピュータ12から送信された圧縮音楽データの受信が開始されると、次のステップSP74に移る。
【0140】
ステップSP74において主制御部50は、通信部56により受信されている圧縮音楽データの再生処理を開始して、次のステップSP75に移る。ステップSP75において主制御部50は、通信部56により受信されている圧縮音楽データを再生処理しながら、その結果得られる音楽データの出力部57への送出を開始すると共に、当該出力部57への音楽データの送出を開始したタイミングでバッファからロボット動きデータの所定単位部分を読み出すようにして駆動制御部53への送出を開始して、次のステップSP76に移る。
【0141】
ステップSP76において主制御部50は、出力部57から音楽データに基づく音楽を出力しながら、駆動制御部53により可動部51を駆動制御させると共に、発光部52を制御させて、次のステップSP77に移る。そしてステップSP77において主制御部50は、出力部57からの音楽の出力が終了したか否かを判別する。このステップSP77において否定結果が得られると、このことは未だ通信部56により受信している圧縮音楽データを再生処理しながら、その結果得られる音楽データを出力部57へ送出していることを表している。従って主制御部50は、かかる否定結果を得ると、ステップSP76に戻る。
【0142】
これにより主制御部50は、この後、ステップSP77において肯定結果を得るまでの間、ステップSP76及びステップSP77の処理を循環的に繰り返し実行する。従って主制御部50は、出力部57から1曲の音楽を連続的に出力しながら、駆動制御部53により可動部51を駆動制御させると共に、発光部52を制御させる。そしてステップSP77において肯定結果が得られると、このことは出力部57からの1曲の音楽の出力が終了し、かつ駆動制御部53により可動部51の駆動制御と発光部52の制御も合わせて終了したことを表している。従って主制御部50は、かかる肯定結果を得ると、次のステップSP78に移り、かかる第5の音楽出力処理手順RT8を終了する。
【0143】
次いで図19に示すフローチャートを用いて、パーソナルコンピュータ12から音楽データと共にロボット動きデータが供給されるときに実行する第6の音楽出力処理手順RT9について説明する。主制御部50は、パーソナルコンピュータ12と通信接続すると、音楽出力プログラムに従い図19に示す第6の音楽出力処理手順RT9を開始する。主制御部50は、かかる第6の音楽出力処理手順RT9を開始すると、ステップSP81においてパーソナルコンピュータ12から送信されるロボット動きデータの所定単位部分の受信を待ち受ける。そしてステップSP81において主制御部50は、通信部56により、パーソナルコンピュータ12から送信されたロボット動きデータの所定単位部分の受信が開始されると、次のステップSP82に移る。
【0144】
ステップSP82において主制御部50は、バッファへのロボット動きデータの一時記憶を開始して、実際に通信部56により受信されたロボット動きデータの所定単位部分をバッファへ一時記憶し、次のステップSP83に移る。ステップSP83において主制御部50は、パーソナルコンピュータ12から送信される音楽データの受信を待ち受ける。そしてステップSP83において主制御部50は、通信部56により、パーソナルコンピュータ12から送信された音楽データの受信が開始されると、次のステップSP84に移る。
【0145】
ステップSP84において主制御部50は、通信部56により受信されている音楽データの出力部57への送出を開始すると共に、当該出力部57へ音楽データの送出を開始したタイミングでバッファからロボット動きデータの所定単位部分を読み出すようにして駆動制御部53への送出を開始して、次のステップSP85に移る。
【0146】
ステップSP85において主制御部50は、出力部57から音楽データに基づく音楽を出力しながら、駆動制御部53により可動部51を駆動制御させると共に、発光部52を制御させて、次のステップSP86に移る。そしてステップSP86において主制御部50は、出力部57からの音楽の出力が終了したか否かを判別する。このステップSP86において否定結果が得られると、このことは未だ通信部56により受信されている音楽データを出力部57へ送出していることを表している。従って主制御部50は、かかる否定結果を得ると、ステップSP85に戻る。
【0147】
これにより主制御部50は、この後、ステップSP86において肯定結果を得るまでの間、ステップSP85及びステップSP86の処理を循環的に繰り返し実行する。従って主制御部50は、出力部57から1曲の音楽を連続的に出力しながら、駆動制御部53により可動部51を駆動制御させると共に、発光部52を制御させる。そしてステップSP86において肯定結果が得られると、このことは出力部57からの1曲の音楽の出力が終了し、かつ駆動制御部53により可動部51の駆動制御と発光部52の制御も合わせて終了したことを表している。従って主制御部50は、かかる肯定結果を得ると、次のステップSP87に移り、かかる第6の音楽出力処理手順RT9を終了する。
【0148】
(3)実施の形態による動作及び効果
以上の構成において、音楽ロボット装置11は、パーソナルコンピュータ12から圧縮音楽データが送信されたとき、通信部56により当該圧縮音楽データを受信して主制御部50により再生処理しながら、その結果得られる音楽データを出力部57に送出して音楽として出力する。また音楽ロボット装置11は、この際、主制御部50により、圧縮音楽データを再生処理して得ている音楽データを用いて分析処理及び動きデータ生成処理を実行して、当該音楽データの複数の曲調区間をそれぞれ再生するときに可動部51を駆動制御するための動きデータと発光部52を制御するための発光データとを設定すると共に、これら曲調区間毎の動きデータ及び発光データを順次ロボット動きデータとして駆動制御部53に送出する。これにより音楽ロボット装置11は、パーソナルコンピュータ12から供給される圧縮音楽データを出力部57から音楽として出力しながら、駆動制御部53によりロボット動きデータに基づき可動部51を駆動制御して所定の可動部動きパターンで動かすと共に、発光部52を制御して所定の発光パターンで発光させる。
【0149】
また音楽ロボット装置11は、パーソナルコンピュータ12から音楽データが送信されたとき、通信部56により当該音楽データを受信しながら主制御部50によりその音楽データを出力部57に送出して音楽として出力する。また音楽ロボット装置11は、この際、主制御部50により、通信部56により受信している音楽データを用いて分析処理及び動きデータ生成処理を実行して、当該音楽データの複数の曲調区間をそれぞれ再生するときに可動部51を駆動制御するための動きデータと発光部52を制御するための発光データとを設定すると共に、これら曲調区間毎の動きデータ及び発光データを順次ロボット動きデータとして駆動制御部53に送出する。これにより音楽ロボット装置11は、パーソナルコンピュータ12から供給される音楽データを出力部57から音楽として出力しながら、駆動制御部53によりロボット動きデータに基づき可動部51を駆動制御して所定の可動部動きパターンで動かすと共に、発光部52を制御して所定の発光パターンで発光させる。
【0150】
従って音楽ロボット装置11は、記憶容量の比較的大きい記憶部を設けるようにして、ユーザに対し多数の圧縮音楽データや音楽データを転送して当該記憶部に記憶するように操作させることなく、また記憶容量の比較的小さい記憶部55を設けることで、ユーザに対し何度も異なる圧縮音楽データや音楽データをその記憶部55に対し記憶し直すように操作させることもなく、容易に、より多くの圧縮音楽データや音楽データを再生して音楽として出力することができる。そして音楽ロボット装置11は、圧縮音楽データや音楽データが供給されたときでも、当該圧縮音楽データや音楽データを受信しながら、これらを用いてロボット動きデータを生成して可動部51を駆動制御すると共に、発光部52を制御することで、より多くの音楽に合わせて容易に可動部51を動かして見せることができると共に、発光部52を発光させて見せることもできる。
【0151】
以上の構成によれば、音楽ロボット装置11において、通信部56により圧縮音楽データや音楽データを受信して出力部57から音楽として出力しながら、主制御部50によりその圧縮音楽データや音楽データを分析すると共に、その分析結果に基づいて音楽データに対応する動きパターンデータを設定して、駆動制御部53により、動きパターンデータに応じて可動部51を駆動制御するようにした。これにより音楽ロボット装置11は、ユーザに対し多数の圧縮音楽データや音楽データを記憶するように操作させることなく、また何度も異なる圧縮音楽データや音楽データを記憶し直すように操作させることもなく、容易に、より多くの音楽に合わせて可動部51を動かして見せることができる。よって音楽ロボット装置11は、従来に比べて使い勝手を格段的に向上させることができる。
【0152】
また音楽ロボット装置11は、パーソナルコンピュータ12から圧縮音楽データや音楽データのみの供給を受けるわけではなく、ロボット動きデータの供給を受け、また圧縮音楽データや、音楽データと共にロボット動きデータの供給も受けて、音楽の出力や可動部51の駆動制御に利用することができる。従って音楽ロボット装置11は、従来に比べてさらに使い勝手を向上させることができる。そして音楽ロボット装置11は、記憶部55に圧縮音楽データを記憶し得ると共に、ロボット動きデータの生成機能も有しているため、パーソナルコンピュータ12と無線通信し得ない状況でも、単独で圧縮音楽データを再生しながら可動部51を動かすことができる。さらに音楽ロボット装置11は、ロボット動きデータの生成機能を有していることにより、ロボット動きデータの生成機能を有しているパーソナルコンピュータ12だけではなく、当該ロボット動きデータの生成機能を有してはいなくても音楽ロボット装置11と無線通信可能な他の携帯電話機等の装置から圧縮音楽データや音楽データの供給を受けて、これらを再生しながら可動部51を動かすこともできる。よって音楽ロボット装置11は、従来に比べてさらに使い勝手を向上させると共に、汎用性や利便性も向上させることができる。
【0153】
さらに音楽ロボット装置11は、圧縮音楽データや音楽データを再生しながらロボット動きデータを生成するときには、出力部57への音楽データの送出開始と、駆動制御部53へのロボット動きデータの送出開始とを遅延させ、当該出力部57への音楽データの送出開始に同期させて駆動制御部53へのロボット動きデータの送出を開始するようにした。従って音楽ロボット装置11は、出力部57から出力する音楽の曲調に同期させて可動部51を順次所定の可動部動きパターンで動かすことができる。
【0154】
ところでパーソナルコンピュータ12は、音楽データの複数の周波数帯域のエネルギーを抽出して複雑なアルゴリズムによりロボット動きデータを生成している。これに対して音楽ロボット装置11は、音楽データの音量レベルに基づいて簡易なアルゴリズムでロボット動きデータを生成している。従って音楽ロボット装置11は、パーソナルコンピュータ12から圧縮音楽データや音楽データが供給されたときには、これらを音楽として出力しながら、パーソナルコンピュータ12に比べて、容易にかつ短時間にロボット動きデータを生成することができる。よって音楽ロボット装置11は、圧縮音楽データや音楽データを再生するとき、ロボット動きデータの生成により処理負荷が著しく増大することを回避することができる。
【0155】
そして音楽ロボット装置11は、パーソナルコンピュータ12に比べて、ロボット動きデータの生成に簡易なアルゴリズムを利用しているため、ビート位置の検出精度(すなわち、曲調区間の区切り精度でもある)や区間特徴の検出精度がわずかに低くなっている。しかしながら音楽ロボット装置11は、圧縮音楽データや音楽データを再生するとき、パーソナルコンピュータ12から、高い精度で検出されたビート位置(すなわち、高い精度で区切られた曲調区間)や高い精度で検出された区間特徴に基づいて生成されたロボット動きデータの供給を受け、そのロボット動きデータを可動部51の駆動制御に利用することができる。従って音楽ロボット装置11は、圧縮音楽データや音楽データを再生するとき、可動部51を音楽の曲調に精度良く同期させ、かつ当該音楽の特徴(すなわち、音楽の印象や雰囲気等)に合った可動部動きパターンで動かすことができる。
【0156】
さらに音楽ロボット装置11は、記憶部55に複数種類の動きパターンデータを記憶しておき、音楽データの曲調区間に対し、当該複数種類の動きパターンデータの中の1つを無作為に選択して割り当てるようにした。従って音楽ロボット装置11は、異なる時点に同一の圧縮音楽データや音楽データを再生するような場合でも、異なる可動部動きパターンを示す動きパターンデータを用いてロボット動きデータを生成し、また音楽の再生時間軸に沿って異なる順番の動きパターンデータを用いてロボット動きデータを生成することができる。これにより音楽ロボット装置11は、異なる時点に同一の圧縮音楽データや音楽データを再生する場合でも、当該音楽ロボット装置11全体を異なるように動かすことができる。
【0157】
(4)他の実施の形態
なお上述した実施の形態においては、音楽ロボット装置11において、音楽データの音量レベルを利用する簡易なアルゴリズムでロボット動きデータを生成するようにした場合について述べたが、本発明はこれに限らず、音楽ロボット装置11において、パーソナルコンピュータ12と同様に、音楽データの複数の周波数帯域のエネルギーを利用する複雑なアルゴリズムでロボット動きデータを生成するようにしても良い。かかる構成によれば、音楽ロボット装置11は、単独で圧縮音楽データを再生する場合、音楽の曲調に精度良く同期し、かつ当該音楽の特徴に合った可動部動きパターンを示すロボット動きデータを生成することができる。
【0158】
また上述した実施の形態においては、パーソナルコンピュータ12から音楽ロボット装置11へロボット動きデータを供給した後、圧縮音楽データや音楽データを供給するようにした場合について述べたが、本発明はこれに限らず、パーソナルコンピュータ12から音楽ロボット装置11へロボット動きデータを圧縮音楽データや音楽データと共に同時並行で供給するようにしても良い。かかる構成によれば、例えばパーソナルコンピュータ12から音楽ロボット装置11へロボット動きデータと音楽データとを同時に供給したとき、当該音楽ロボット装置11においてロボット動きデータの駆動制御部53への送出開始を何ら遅延させることなく、当該ロボット動きデータを受信しながら駆動制御部53を送出することができる。
【0159】
さらに上述した実施の形態においては、音楽ロボット装置11において、圧縮音楽データや音楽データを再生しながらロボット動きデータを生成するとき、出力部57への音楽データの送出開始と駆動制御部53へのロボット動きデータの送出開始とを遅延させるようにした場合について述べたが、本発明はこれに限らず、音楽ロボット装置11において、圧縮音楽データや音楽データを再生しながらロボット動きデータを生成するとき、出力部57への音楽データの送出開始を遅延させずに当該音楽データを出力部57に送出しながら、その音楽データの先頭から少なくとも2つ目以降の曲調区間を出力部57に送出するときに駆動制御部53へのロボット動きデータの送出を開始するようにしても良い。そして音楽ロボット装置11は、出力部57への音楽データの出力が終了したときに駆動制御部53へのロボット動きデータの送出も強制的に終了するようにしても良い。
【0160】
かかる構成によれば、音楽ロボット装置11では、出力部57から音楽を出力させ始めたときには、可動部51が動かないものの、当該出力部57から音楽をある程度出力した時点からその出力が終了するまでの間は、音楽の曲調に同期させて可動部51を動かすことができる。そして音楽ロボット装置11は、かかる構成により駆動制御部53へのロボット動きデータの送出開始を遅延させるだけの簡易な処理で、あたかも音楽の出力開始から可動部51の動きの開始を故意に遅らせているよう演出しているように見せて、音楽と可動部51の動きとをユーザに楽しませることができる。
【0161】
さらに上述した実施の形態においては、パーソナルコンピュータ12がユーザの要求に応じて音楽ロボット装置11へ圧縮音楽データや音楽データ、ロボット動きデータを供給するようにした場合について述べたが、本発明はこれに限らず、音楽ロボット装置11に対し例えば複数の音楽データを登録しているプレイリストのようなリストを保持しておき、当該音楽ロボット装置11がユーザの要求に応じて、かかるリストに従いパーソナルコンピュータ12に対し圧縮音楽データや音楽データ、ロボット動きデータを要求して、これらの供給を受けるようにしても良い。
【0162】
さらに上述した実施の形態においては、音楽ロボット装置11において主制御部50のバッファにロボット動きデータを一時記憶して駆動制御部53への送出開始を遅延させるようにした場合について述べたが、本発明はこれに限らず、駆動制御部53にバッファを設け、当該駆動制御部53のバッファにロボット動きデータを一時記憶することで、ロボット動きデータの駆動制御部53への送出開始を遅延させるのではなく、当該駆動制御部53に対しバッファからのロボット動きデータの読み出しを遅延させて、その結果、ロボット動きデータに基づく可動部51の駆動制御の開始及び発光部52の制御の開始を制御するようにしても良い。
【0163】
さらに上述した実施の形態においては、音楽ロボット装置11において、圧縮音楽データや音楽データを再生しながらロボット動きデータを生成するとき、単に出力部57への音楽データの送出開始と駆動制御部53へのロボット動きデータの送出開始とを遅延させるようにした場合について述べたが、本発明はこれに限らず、音楽ロボット装置11において、出力部57への音楽データの送出開始と駆動制御部53へのロボット動きデータの送出開始とを遅延させている間、駆動制御部53により、予め生成された特定の可動部動きパターンを示すロボット動きデータに基づいて可動部51を駆動制御(及び発光部52を制御)するようにしても良い。かかる構成によれば、例えば音楽ロボット装置11を、音楽に合わせた動きに先立ち、あたかも準備運動しているように演出して見せることができ、ユーザをより一層楽しませることができる。また音楽ロボット装置11では、音楽の出力が終了した時点からも特定の可動部動きパターンで可動部51を動かすようにしても良い。かかる構成によれば、音楽ロボット装置11のエンターテイメント性を格段的に向上させることができる。
【0164】
さらに上述した実施の形態においては、パーソナルコンピュータ12において圧縮音楽データを用いて生成したロボット動きデータを記憶保持するようにした場合について述べたが、本発明はこれに限らず、パーソナルコンピュータ12において圧縮音楽データを用いてロボット動きデータを生成したとき、当該圧縮音楽データに対する分析結果のみを記憶保持し、同一の圧縮音楽データを用いてロボット動きデータを生成するように要求される毎に、対応する分析結果を用いて曲調区間に対し動きパターンデータや発光パターンデータを新たに割り当てるようにしてロボット動きデータを生成するようにしても良い。かかる構成によれば、ロボット動きデータの生成時の処理負荷を大幅に低減させることができると共に、その生成に要する処理時間も大幅に短縮することができる。そしてかかる構成については、音楽ロボット装置11に反映させることもでき、これにより音楽ロボット装置11でも、ロボット動きデータの生成時における処理負荷を大幅に低減させることができると共に、その生成に要する処理時間も大幅に短縮することができる。また音楽ロボット装置11は、異なる時点に同じ圧縮音楽データや音楽データを再生するときに、当該音楽ロボット装置11全体の異なる動きを提供してユーザを楽しませることができる。
【0165】
さらに上述した実施の形態においては、音楽ロボット装置11やパーソナルコンピュータ12において図9に示すように、音楽データを1つの音として解析するようにした場合について述べたが、本発明はこれに限らず、音楽ロボット装置11やパーソナルコンピュータ12において、音楽データを右スピーカ28用のデータと左スピーカ29用のデータとに分けて分析処理し、例えば右スピーカ28用のデータに対する分析結果に基づき筐体右側回動部22、筐体右側開閉部24、右側車輪30、右側発光部34用の動きデータ及び発光データを生成し、左スピーカ29用のデータに対する分析結果に基づき筐体左側回動部23、筐体左側開閉部25、左側車輪31、左側発光部35用の動きデータ及び発光データを生成するようにしても良い。
【0166】
さらに上述した実施の形態においては、パーソナルコンピュータ12が1台の音楽ロボット装置11に対し圧縮音楽データや音楽データ、ロボット動きデータを供給するようにした場合について述べたが、本発明はこれに限らず、パーソナルコンピュータ12が少なくとも2台の音楽ロボット装置11に対し圧縮音楽データや音楽データ、ロボット動きデータを供給するようにしても良い。
【0167】
そして、かかる構成の際には、パーソナルコンピュータ12が、少なくとも2台の音楽ロボット装置11に対し例えば時間を数秒や十数秒程度ずらして圧縮音楽データや音楽データ、ロボット動きデータを供給することにより、これら少なくとも2台の音楽ロボット装置11に対し、同一の音楽を、時間をずらして出力させながら可動部51も時間をずらして動かすようにしても良い。因みに、パーソナルコンピュータ12は、少なくとも2台の音楽ロボット装置11が同一の圧縮音楽データを予め保持していると、圧縮音楽データの再生開始のタイミングをずらして通知し、又は同一のロボット動きデータを、タイミングをずらして供給しても、これら少なくとも2台の音楽ロボット装置11に対し音楽の出力と可動部51の動きとをずらして動作させることができる。
【0168】
また、かかる構成の際には、パーソナルコンピュータ12が1つの圧縮音楽データを用いて対称的な動きをさせるような2種類のロボット動きデータを生成し、これら2種類のロボット動きデータを圧縮音楽データ又は音楽データと共に2台の音楽ロボット装置11に対し同時に供給することにより、当該2台の音楽ロボット装置11に対し同一の音楽を合わせて出力させながら、互いの可動部51を対称的に動かすようにしても良い。因みに、パーソナルコンピュータ12は、2台の音楽ロボット装置11でロボット動きデータを生成する場合、これら2台の音楽ロボット装置11に対し、音楽データに割り当てる動きパターンデータや発光パターンデータを指示し、かつ割り当てる順番も指示することでも、互いの可動部51を対称的に動かすことができる。またパーソナルコンピュータ12は、この際に、2台の音楽ロボット装置11の一方の音楽ロボット装置11から右スピーカ28用の音楽を出力させ、他方の音楽ロボット装置11から左スピーカ29用の音楽を出力させるようにしても良い。そして、これらの構成によれば、音楽再生システム10において音楽ロボット装置11のエンターテイメント性を格段的に向上させることができる。
【0169】
さらに上述した実施の形態においては、本発明による音楽出力プログラムを、音楽ロボット装置11の記憶部55又は主制御部50の内部メモリに記憶された音楽出力プログラムに適用し、当該主制御部50がその音楽出力プログラムに従ってビート検出処理手順RT1、特徴解析処理手順RT2、動きデータ生成処理手順RT3、第1の音楽出力処理手順RT4、第2の音楽出力処理手順RT5、第3の音楽出力処理手順RT6、第4の音楽出力処理手順RT7、第5の音楽出力処理手順RT8及び第6の音楽出力処理手順RT9を実行するようにした場合について述べたが、本発明はこれに限らず、音楽ロボット装置11に対し、音楽出力プログラムが格納されたプログラム格納媒体をインストールして上述したビート検出処理手順RT1、特徴解析処理手順RT2、動きデータ生成処理手順RT3、第1の音楽出力処理手順RT4、第2の音楽出力処理手順RT5、第3の音楽出力処理手順RT6、第4の音楽出力処理手順RT7、第5の音楽出力処理手順RT8及び第6の音楽出力処理手順RT9を実行するようにしても良い。
【0170】
なお、このような上述したビート検出処理手順RT1、特徴解析処理手順RT2、動きデータ生成処理手順RT3、第1の音楽出力処理手順RT4、第2の音楽出力処理手順RT5、第3の音楽出力処理手順RT6、第4の音楽出力処理手順RT7、第5の音楽出力処理手順RT8及び第6の音楽出力処理手順RT9を実行させるための音楽出力プログラムを音楽ロボット装置11にインストールして実行可能な状態にするためのプログラム格納媒体としては、例えばフレキシブルディスク、CD−ROM(Compact Disc-Read Only Memory )、DVD(Digital Versatile Disc)等のパッケージメディアのみならず、各種プログラムが一時的もしくは永続的に格納される半導体メモリや磁気ディスク等で実現しても良い。また、これらプログラム格納媒体に音楽出力プログラムを格納する手段としては、ローカルエリアネットワークやインターネット、デジタル衛星放送等の有線及び無線通信媒体を利用しても良く、ルータやモデム等の各種通信インターフェイスを介して格納するようにしても良い。
【0171】
さらに上述した実施の形態においては、パーソナルコンピュータ12から圧縮音楽データや音楽データ、ロボット動きデータを音楽ロボット装置11に供給するようにした場合について述べたが、本発明はこれに限らず、音楽ロボット装置11との無線通信機能や有線通信機能を有する携帯電話機やPDA(Personal Digital Assistance )等の情報処理装置、また携帯型音楽再生装置や据置型音楽再生装置等の再生装置、DVDレコーダやハードディスクレコーダ等の記録再生装置、さらにはパーソナルコンピュータや携帯電話機を介して最終的に通信可能なネットワーク上のサーバ等のように、この他種々の装置から圧縮音楽データや音楽データ、ロボット動きデータを音楽ロボット装置11に供給するようにしても良い。
【0172】
さらに上述した実施の形態においては、本発明によるロボット装置を、図1乃至図19について上述した音楽ロボット装置1及び11に適用するようにした場合について述べたが、本発明はこれに限らず、可動部を有し、圧縮音楽データや音楽データの再生機能を有するものであれば、2足歩行型や4足歩行型、車型等のように、この他種々の形態のロボット装置に広く適用することができる。
【0173】
さらに上述した実施の形態においては、ロボット装置に設けられた可動部として、図1乃至図19について上述した音楽ロボット装置1の可動部2や、音楽ロボット装置11の筐体右側回動部22、筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30、左側車輪31を適用するようにした場合について述べたが、本発明はこれに限らず、ロボット装置の形態に応じて腕部や足部、首部、頭部等のように、この他種々の可動部を広く適用することができる。
【0174】
さらに上述した実施の形態においては、音楽データを受信する受信部として、図1乃至図19について上述した音楽ロボット装置1の受信部3や音楽ロボット装置11の通信部56を適用するようにした場合について述べたが、本発明はこれに限らず、UWB(Ultra Wide Band )と呼ばれる短距離無線通信技術に準拠した通信部等のように、この他種々の受信部を広く適用することができる。
【0175】
さらに上述した実施の形態においては、受信部により受信されている音楽データを音楽として出力する出力部として、図1乃至図19について上述した音楽ロボット装置1の出力部4や音楽ロボット装置11の出力部57を適用するようにした場合について述べたが、本発明はこれに限らず、アナログスピーカを有する出力部等のように、この他種々の出力部を広く適用することができる。
【0176】
さらに上述した実施の形態においては、受信部により受信されている音楽データを分析する分析部として、図1乃至図19について上述した音楽ロボット装置1の分析部5や音楽ロボット装置11の主制御部50を適用するようにした場合について述べたが、本発明はこれに限らず、CPU(Central Processing Unit )やDSP(Digital Signal Processor)等のように、この他種々の分析部を広く適用することができる。
【0177】
さらに上述した実施の形態においては、分析部により分析されている音楽データの分析結果に基づいて、出力部により出力される音楽に対応する可動部動きパターンを設定する設定部として、図1乃至図19について上述した音楽ロボット装置1の設定部6や音楽ロボット装置11の主制御部50を適用するようにした場合について述べたが、本発明はこれに限らず、CPU等のように、この他種々の設定部を広く適用することができる。
【0178】
さらに上述した実施の形態においては、受信部により音楽データが受信されながら出力部により音楽として出力されていると、設定部により設定された可動部動きパターンに応じて可動部を駆動制御する駆動制御部として、図1乃至図19について上述した音楽ロボット装置1の駆動制御部7や音楽ロボット装置11のマイクロコンピュータ構成の駆動制御部53を適用するようにした場合について述べたが、本発明はこれに限らず、CPU等のように、この他種々の駆動制御部を広く適用することができる。
【0179】
さらに上述した実施の形態においては、受信部により受信されている音楽データを再生処理しながら出力部に送出する再生処理部として、図1乃至図19について上述した音楽ロボット装置11の主制御部50を適用するようにした場合について述べたが、本発明はこれに限らず、DSPやイコライジング機能を有する再生処理部等のように、この他種々の再生処理部を広く適用することができる。
【0180】
さらに上述した実施の形態においては、出力部により音楽の所定区間部分が出力される毎に、可動部が可動部動きパターンで動くよう、再生処理部及び駆動制御部の少なくとも一方を制御する制御部として、図1乃至図19について上述した音楽ロボット装置11のマイクロコンピュータ構成の主制御部50を適用するようにした場合について述べたが、本発明はこれに限らず、CPUやDSP等のように、この他種々の制御部を広く適用することができる。
【0181】
さらに上述した実施の形態においては、設定部により音楽の所定区間部分に設定される複数種類の可動部動きパターンを示す動きパターンデータを記憶する記憶部として、図1乃至図19について上述した音楽ロボット装置11の記憶部55を適用するようにした場合について述べたが、本発明はこれに限らず、音楽ロボット装置11に内蔵される半導体メモリやハードディスクドライブ、また音楽ロボット装置11に着脱可能に取り付けられる半導体メモリやCD-ROMドライブ、ハードディスクドライブ等のように、この他種々の記憶部を広く適用することができる。
【産業上の利用可能性】
【0182】
本発明は、音楽を再生し、かつ可動部を有する自走可能な又は据置型の音楽ロボット装置や、4足歩行型及び2足歩行型の音楽ロボット装置等のロボット装置に利用することができる。
【図面の簡単な説明】
【0183】
【図1】本発明による音楽ロボット装置の構成の概要を示すブロック図である。
【図2】本発明による音楽再生システムの構成を示す略線図である。
【図3】本発明による音楽ロボット装置の外観構成を示す略線的斜視図である。
【図4】音楽ロボット装置の背面構成を示す略線図である。
【図5】筐体右側回動部及び筐体左側回動部に対する筐体右側開閉部及び筐体左側開閉部の開閉の説明に供する略線図である。
【図6】筐体右側回動部及び筐体左側回動部の回動の説明に供する略線図である。
【図7】パーソナルコンピュータの回路構成を示すブロック図である。
【図8】動きパターンデータテーブルの構成を示す略線図である。
【図9】ロボット動きデータの生成の説明に供する略線図である。
【図10】音楽ロボット装置の回路構成を示すブロック図である。
【図11】分析処理におけるビート検出処理手順を示すフローチャートである。
【図12】分析処理における特徴解析処理手順を示すフローチャートである。
【図13】動きデータ生成処理手順を示すフローチャートである。
【図14】第1の音楽出力処理手順を示すフローチャートである。
【図15】第2の音楽出力処理手順を示すフローチャートである。
【図16】第3の音楽出力処理手順を示すフローチャートである。
【図17】第4の音楽出力処理手順を示すフローチャートである。
【図18】第5の音楽出力処理手順を示すフローチャートである。
【図19】第6の音楽出力処理手順を示すフローチャートである。
【符号の説明】
【0184】
1、11……音楽ロボット装置、2、51……可動部、3……受信部、4、57……出力部、5……分析部、6……設定部、7、53……駆動制御部、10……音楽再生システム、12……パーソナルコンピュータ、20……楕円体状筐体、21……筐体中央部、22……筐体右側回動部、23……筐体左側回動部、24……筐体右側開閉部、25……筐体左側開閉部、28……右スピーカ、29……左スピーカ、30……右側車輪、31……左側車輪、34……右側発光部、35……左側発光部、50……主制御部、52……発光部、RT1……ビート検出処理手順、RT2……特徴解析処理手順、RT3……動きデータ生成処理手順、RT4……第1の音楽出力処理手順、RT5……第2の音楽出力処理手順、RT6……第3の音楽出力処理手順、RT7……第4の音楽出力処理手順、RT8……第5の音楽出力処理手順、RT9……第6の音楽出力処理手順。
【特許請求の範囲】
【請求項1】
可動部を有するロボット装置であって、
音楽データを受信する受信部と、
上記受信部により受信されている上記音楽データを音楽として出力する出力部と、
上記受信部により受信されている上記音楽データを分析する分析部と、
上記分析部により分析されている上記音楽データの上記分析結果に基づいて、上記出力部により出力される上記音楽に対応する可動部動きパターンを設定する設定部と、
上記受信部により上記音楽データが受信されながら上記出力部により上記音楽として出力されていると、上記設定部により設定された上記可動部動きパターンに応じて上記可動部を駆動制御する駆動制御部と
を具えることを特徴とするロボット装置。
【請求項2】
上記設定部は、
上記分析部により分析されている上記音楽データの上記分析結果に基づいて、上記出力部により出力される音楽の所定区間部分毎に上記可動部動きパターンを設定する
ことを特徴とする請求項1に記載のロボット装置。
【請求項3】
上記受信部により受信されている上記音楽データを再生処理しながら上記出力部に送出する再生処理部と、
上記出力部により上記音楽の所定区間部分が出力される毎に、上記可動部が上記可動部動きパターンで動くよう、上記再生処理部及び上記駆動制御部の少なくとも一方を制御する制御部と
を具えることを特徴とする請求項2に記載のロボット装置。
【請求項4】
上記制御部は、
上記出力部により上記音楽の上記所定区間部分が出力される毎に、上記可動部が上記可動部動きパターンで動くよう、上記再生処理された上記音楽データの上記出力部への送出開始を所定時間遅延させるように上記再生処理部を制御する
ことを特徴とする請求項3に記載のロボット装置。
【請求項5】
上記制御部は、
上記出力部により上記音楽の上記所定区間部分が出力される毎に、上記可動部が上記可動部動きパターンで動くよう、上記可動部に対する上記可動部動きパターンに応じた駆動制御の開始を所定時間遅延させるように上記駆動制御部を制御する
ことを特徴とする請求項3に記載のロボット装置。
【請求項6】
上記制御部は、
上記出力部により上記音楽の最後尾の上記所定区間部分の出力が終了すると、上記可動部に対する上記可動部動きパターンに応じた駆動制御を終了させるように上記駆動制御部を制御する
ことを特徴とする請求項5に記載のロボット装置。
【請求項7】
上記設定部により上記音楽の上記所定区間部分に設定される複数種類の上記可動部動きパターンを示す動きパターンデータを記憶する記憶部
を具えることを特徴とする請求項2に記載のロボット装置。
【請求項8】
上記分析部は、
上記受信部により受信されている上記音楽データを分析して上記音楽のビートを検出する
ことを特徴とする請求項1に記載のロボット装置。
【請求項9】
上記分析部は、
上記受信部により受信されている上記音楽データの音量レベルに基づいて、上記音楽の上記ビートを検出する
ことを特徴とする請求項8に記載のロボット装置。
【請求項10】
可動部が設けられたロボット装置により音楽を出力する音楽出力方法であって、
音楽データを受信して音楽として出力しながら、当該受信している上記音楽データを分析すると共に、当該分析結果に基づいて上記音楽に対応する可動部動きパターンを設定して、当該設定した上記可動部動きパターンに応じて上記可動部を駆動制御する駆動制御ステップ
を具えることを特徴とする音楽出力方法。
【請求項11】
可動部が設けられたロボット装置に対し、
音楽データを受信して音楽として出力しながら、当該受信している上記音楽データを分析すると共に、当該分析結果に基づいて上記音楽に対応する可動部動きパターンを設定して、当該設定した上記可動部動きパターンに応じて上記可動部を駆動制御する駆動制御ステップ
を実行させるための音楽出力プログラム。
【請求項12】
上記駆動制御ステップは、
上記音楽データの上記分析結果に基づいて、上記出力する音楽の所定区間部分毎に上記可動部動きパターンを設定する
ことを上記ロボット装置に実行させるための請求項11に記載の音楽出力プログラム。
【請求項13】
上記駆動制御ステップは、
上記音楽データを受信して再生処理しながら、上記音楽の所定区間部分を出力する毎に、上記可動部が上記可動部動きパターンで動くよう、上記再生処理した上記音楽データの上記音楽としての出力及び上記可動部に対する駆動制御の少なくとも一方を制御する
ことを上記ロボット装置に実行させるための請求項12に記載の音楽出力プログラム。
【請求項14】
上記駆動制御ステップは、
上記音楽の上記所定区間部分を出力する毎に、上記可動部が上記可動部動きパターンで動くよう、再生処理した上記音楽データの上記音楽としての出力開始を所定時間遅延させる
ことを上記ロボット装置に実行させるための請求項13に記載の音楽出力プログラム。
【請求項15】
上記駆動制御ステップは、
上記音楽の上記所定区間部分を出力する毎に、上記可動部が上記可動部動きパターンで動くよう、上記可動部に対する上記可動部動きパターンに応じた駆動制御の開始を所定時間遅延させる
ことを上記ロボット装置に実行させるための請求項13に記載の音楽出力プログラム。
【請求項16】
上記駆動制御ステップは、
上記音楽の最後尾の上記所定区間部分の出力が終了すると、上記可動部に対する上記可動部動きパターンに応じた駆動制御を終了させる
ことを上記ロボット装置に実行させるための請求項15に記載の音楽出力プログラム。
【請求項17】
上記駆動制御ステップは、
予め記憶されている複数種類の上記可動部動きパターンを用いて、上記分析結果に基づき上記音楽の上記所定区間部分毎に上記可動部動きパターンを設定する
ことを上記ロボット装置に実行させるための請求項12に記載の音楽出力プログラム。
【請求項18】
上記駆動制御ステップは、
上記受信している上記音楽データを分析して上記音楽のビートを検出する
ことを上記ロボット装置に実行させるための請求項11に記載の音楽出力プログラム。
【請求項19】
上記駆動制御ステップは、
上記受信している上記音楽データの音量レベルに基づいて、上記音楽の上記ビートを検出する
ことを上記ロボット装置に実行させるための請求項18に記載の音楽出力プログラム。
【請求項1】
可動部を有するロボット装置であって、
音楽データを受信する受信部と、
上記受信部により受信されている上記音楽データを音楽として出力する出力部と、
上記受信部により受信されている上記音楽データを分析する分析部と、
上記分析部により分析されている上記音楽データの上記分析結果に基づいて、上記出力部により出力される上記音楽に対応する可動部動きパターンを設定する設定部と、
上記受信部により上記音楽データが受信されながら上記出力部により上記音楽として出力されていると、上記設定部により設定された上記可動部動きパターンに応じて上記可動部を駆動制御する駆動制御部と
を具えることを特徴とするロボット装置。
【請求項2】
上記設定部は、
上記分析部により分析されている上記音楽データの上記分析結果に基づいて、上記出力部により出力される音楽の所定区間部分毎に上記可動部動きパターンを設定する
ことを特徴とする請求項1に記載のロボット装置。
【請求項3】
上記受信部により受信されている上記音楽データを再生処理しながら上記出力部に送出する再生処理部と、
上記出力部により上記音楽の所定区間部分が出力される毎に、上記可動部が上記可動部動きパターンで動くよう、上記再生処理部及び上記駆動制御部の少なくとも一方を制御する制御部と
を具えることを特徴とする請求項2に記載のロボット装置。
【請求項4】
上記制御部は、
上記出力部により上記音楽の上記所定区間部分が出力される毎に、上記可動部が上記可動部動きパターンで動くよう、上記再生処理された上記音楽データの上記出力部への送出開始を所定時間遅延させるように上記再生処理部を制御する
ことを特徴とする請求項3に記載のロボット装置。
【請求項5】
上記制御部は、
上記出力部により上記音楽の上記所定区間部分が出力される毎に、上記可動部が上記可動部動きパターンで動くよう、上記可動部に対する上記可動部動きパターンに応じた駆動制御の開始を所定時間遅延させるように上記駆動制御部を制御する
ことを特徴とする請求項3に記載のロボット装置。
【請求項6】
上記制御部は、
上記出力部により上記音楽の最後尾の上記所定区間部分の出力が終了すると、上記可動部に対する上記可動部動きパターンに応じた駆動制御を終了させるように上記駆動制御部を制御する
ことを特徴とする請求項5に記載のロボット装置。
【請求項7】
上記設定部により上記音楽の上記所定区間部分に設定される複数種類の上記可動部動きパターンを示す動きパターンデータを記憶する記憶部
を具えることを特徴とする請求項2に記載のロボット装置。
【請求項8】
上記分析部は、
上記受信部により受信されている上記音楽データを分析して上記音楽のビートを検出する
ことを特徴とする請求項1に記載のロボット装置。
【請求項9】
上記分析部は、
上記受信部により受信されている上記音楽データの音量レベルに基づいて、上記音楽の上記ビートを検出する
ことを特徴とする請求項8に記載のロボット装置。
【請求項10】
可動部が設けられたロボット装置により音楽を出力する音楽出力方法であって、
音楽データを受信して音楽として出力しながら、当該受信している上記音楽データを分析すると共に、当該分析結果に基づいて上記音楽に対応する可動部動きパターンを設定して、当該設定した上記可動部動きパターンに応じて上記可動部を駆動制御する駆動制御ステップ
を具えることを特徴とする音楽出力方法。
【請求項11】
可動部が設けられたロボット装置に対し、
音楽データを受信して音楽として出力しながら、当該受信している上記音楽データを分析すると共に、当該分析結果に基づいて上記音楽に対応する可動部動きパターンを設定して、当該設定した上記可動部動きパターンに応じて上記可動部を駆動制御する駆動制御ステップ
を実行させるための音楽出力プログラム。
【請求項12】
上記駆動制御ステップは、
上記音楽データの上記分析結果に基づいて、上記出力する音楽の所定区間部分毎に上記可動部動きパターンを設定する
ことを上記ロボット装置に実行させるための請求項11に記載の音楽出力プログラム。
【請求項13】
上記駆動制御ステップは、
上記音楽データを受信して再生処理しながら、上記音楽の所定区間部分を出力する毎に、上記可動部が上記可動部動きパターンで動くよう、上記再生処理した上記音楽データの上記音楽としての出力及び上記可動部に対する駆動制御の少なくとも一方を制御する
ことを上記ロボット装置に実行させるための請求項12に記載の音楽出力プログラム。
【請求項14】
上記駆動制御ステップは、
上記音楽の上記所定区間部分を出力する毎に、上記可動部が上記可動部動きパターンで動くよう、再生処理した上記音楽データの上記音楽としての出力開始を所定時間遅延させる
ことを上記ロボット装置に実行させるための請求項13に記載の音楽出力プログラム。
【請求項15】
上記駆動制御ステップは、
上記音楽の上記所定区間部分を出力する毎に、上記可動部が上記可動部動きパターンで動くよう、上記可動部に対する上記可動部動きパターンに応じた駆動制御の開始を所定時間遅延させる
ことを上記ロボット装置に実行させるための請求項13に記載の音楽出力プログラム。
【請求項16】
上記駆動制御ステップは、
上記音楽の最後尾の上記所定区間部分の出力が終了すると、上記可動部に対する上記可動部動きパターンに応じた駆動制御を終了させる
ことを上記ロボット装置に実行させるための請求項15に記載の音楽出力プログラム。
【請求項17】
上記駆動制御ステップは、
予め記憶されている複数種類の上記可動部動きパターンを用いて、上記分析結果に基づき上記音楽の上記所定区間部分毎に上記可動部動きパターンを設定する
ことを上記ロボット装置に実行させるための請求項12に記載の音楽出力プログラム。
【請求項18】
上記駆動制御ステップは、
上記受信している上記音楽データを分析して上記音楽のビートを検出する
ことを上記ロボット装置に実行させるための請求項11に記載の音楽出力プログラム。
【請求項19】
上記駆動制御ステップは、
上記受信している上記音楽データの音量レベルに基づいて、上記音楽の上記ビートを検出する
ことを上記ロボット装置に実行させるための請求項18に記載の音楽出力プログラム。
【図1】


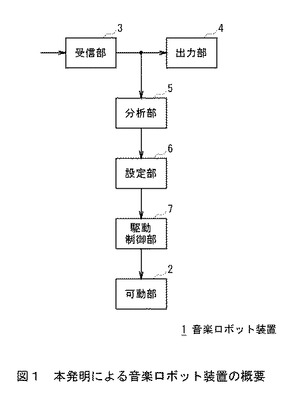
【図2】
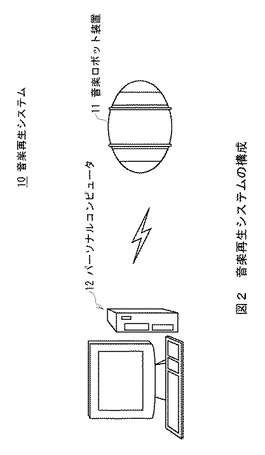
【図3】
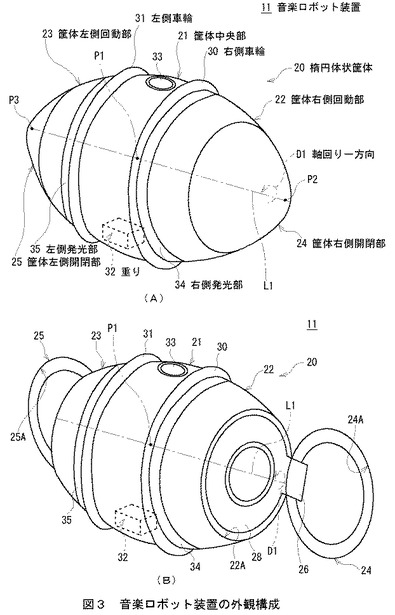
【図4】
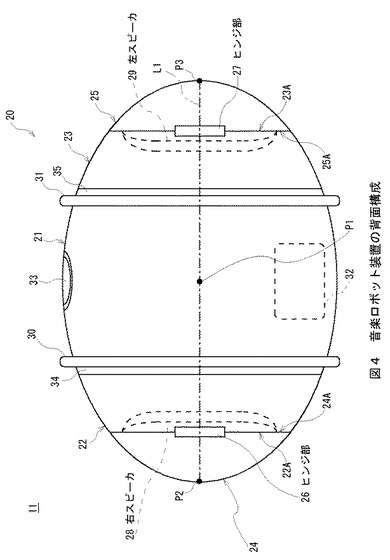
【図5】
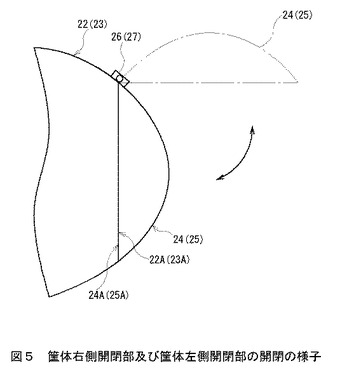
【図6】
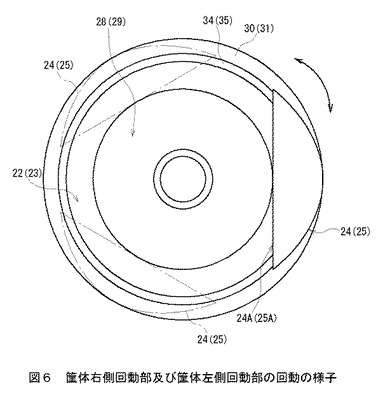
【図7】
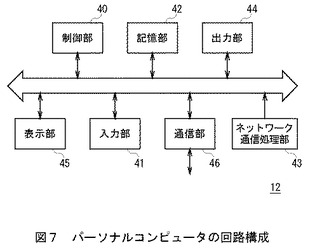
【図8】
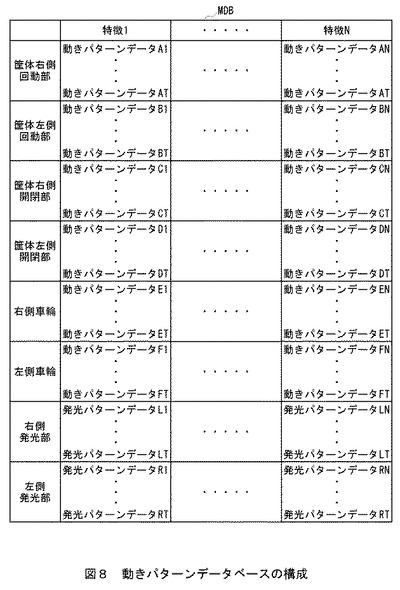
【図9】
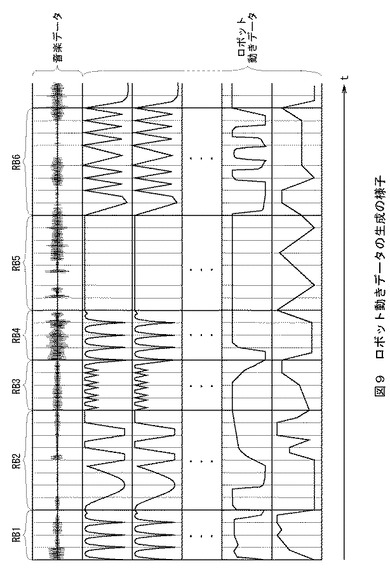
【図10】
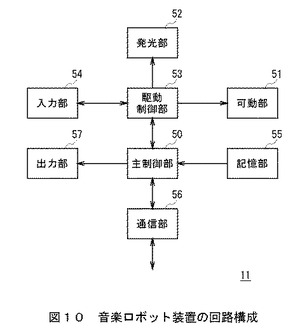
【図11】
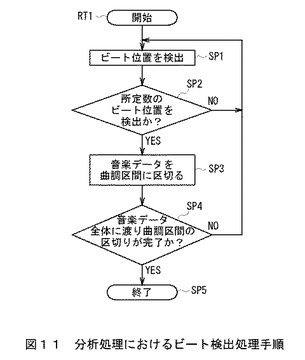
【図12】
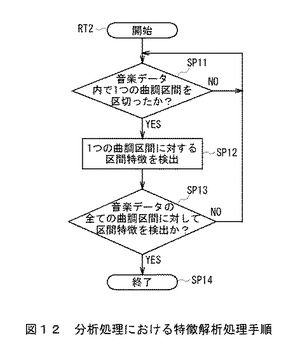
【図13】
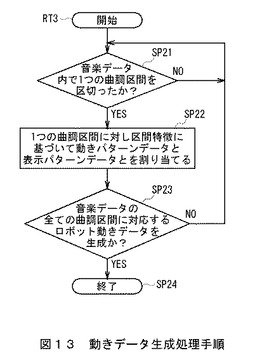
【図14】
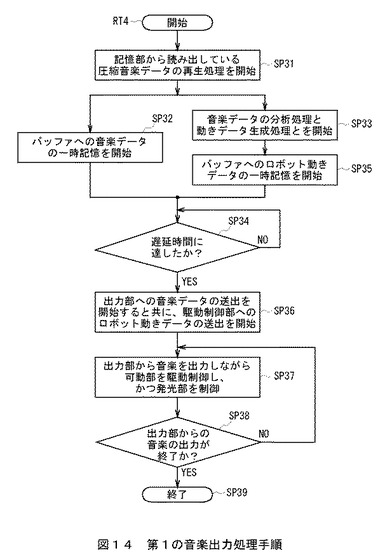
【図15】
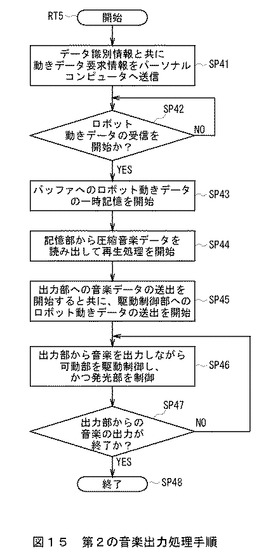
【図16】
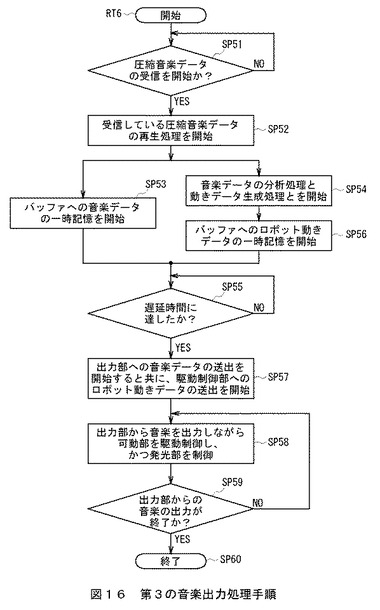
【図17】
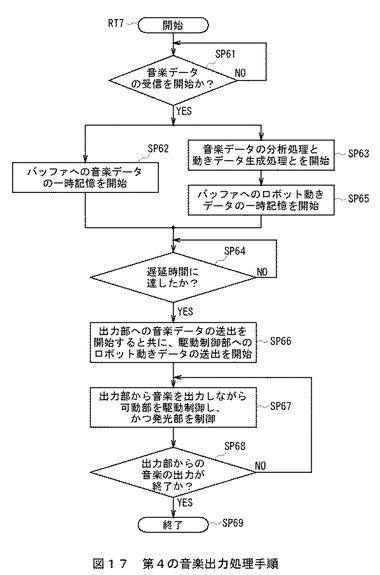
【図18】
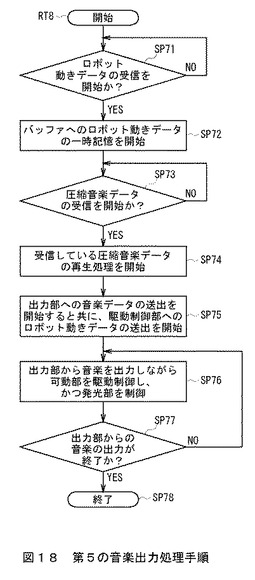
【図19】
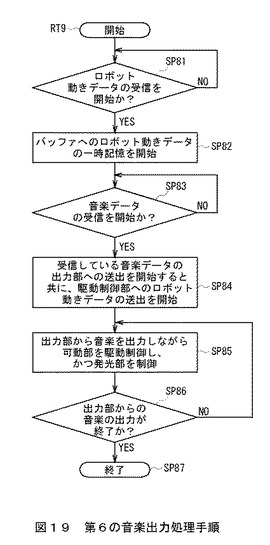
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2008−90013(P2008−90013A)
【公開日】平成20年4月17日(2008.4.17)
【国際特許分類】
【出願番号】特願2006−271331(P2006−271331)
【出願日】平成18年10月2日(2006.10.2)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.Bluetooth
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
【公開日】平成20年4月17日(2008.4.17)
【国際特許分類】
【出願日】平成18年10月2日(2006.10.2)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.Bluetooth
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
[ Back to top ]