
ロボット
【課題】ロボットに「ぬくもり」(温度)を与えることで、使用者がロボットの「体温」を感じ取ることができ、その結果、動物に接触している感覚に近いロボットを提供する。
【解決手段】ロボット(1)は、電気的動作をすることで発熱する発熱源(61)を内部に備える。また、ロボット(1)は、発熱源(61)の発熱を吸収する熱吸収部(71)と、ロボット(1)の外装部に放熱する複数の放熱部(73)と、熱吸収部(71)から各放熱部(73)へ熱を伝導する熱伝導部(72)とで構成される熱伝導手段(70)を備える。熱伝導部(72)を、熱伝導部(72)の断面積が、熱吸収部(71)から放熱部(73)に至る熱伝導部(72)の経路長が長い程大きくなるように形成した。
【解決手段】ロボット(1)は、電気的動作をすることで発熱する発熱源(61)を内部に備える。また、ロボット(1)は、発熱源(61)の発熱を吸収する熱吸収部(71)と、ロボット(1)の外装部に放熱する複数の放熱部(73)と、熱吸収部(71)から各放熱部(73)へ熱を伝導する熱伝導部(72)とで構成される熱伝導手段(70)を備える。熱伝導部(72)を、熱伝導部(72)の断面積が、熱吸収部(71)から放熱部(73)に至る熱伝導部(72)の経路長が長い程大きくなるように形成した。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ロボットセラピーなどに使用されると好適な癒し系のロボットに関するものである。
【背景技術】
【0002】
従来から、アニマルセラピーの効果を衛生的かつ安全に実現するため、ロボットセラピーの研究が進んでいる。また、高齢者の癒しなどにロボットセラピーが実際に導入され始めている。そして、ロボットセラピーの効果を上げるためには、ロボットのもつ「ぬくもり」(肌触りと温度)が大切になっている。
一方、ロボットの温度を制御する技術については、従来から提案されている(例えば、特許文献1参照。)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平6−126672号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記のような従来の温度制御技術は、ロボットの関節を待機温度から動作可能温度まで短時間で昇温させる宇宙用ロボットについてのものであり、ロボットセラピーなどに使用される癒し系のロボットに必要な「ぬくもり」(肌触りと温度)とは無縁のものである。
【0005】
また、従来の癒し系のロボットには、肌触りを良くするため、人工的な毛皮などが使われているものがある。このようなロボットは、肌触りとしては良好なものであるが、ロボットの「体温」は全く管理されていない。
【0006】
そのため、このような従来のロボットの場合、その表面のほぼ全域が冷たくて、使用者がロボットの「体温」を感じ取ることができないという問題がある。
【0007】
また、従来のロボットの中には、ロボット内部の発熱源による影響で、表面のごく一部が熱く感じられる程度まで温度上昇してしまう場合もある。
【0008】
いずれにしても、従来のロボットは、外見的には動物に擬態させてあっても、使用者が動物のもつ体温を感じ取ることができないものであり、したがって、動物に接触している感覚とはほど遠いものであった。
【0009】
そこで、本発明が解決しようとする課題は、ロボットに「ぬくもり」(温度)を与えることで、使用者がロボットの「体温」を感じ取ることができ、その結果、動物に接触している感覚に近いロボットを提供することにある。
【課題を解決するための手段】
【0010】
本発明は上記課題を解決するものであって、請求項1に係る発明は、電気的動作をすることで発熱する発熱源を内部に備えたロボットにおいて、前記発熱源の発熱を吸収する熱吸収部と、前記ロボットの外装部に放熱する複数の放熱部と、前記熱吸収部から前記各放熱部へ熱を伝導する熱伝導部とで構成される熱伝導手段を備え、前記熱伝導部を、該熱伝導部の断面積が、前記熱吸収部から前記放熱部に至る前記熱伝導部の経路長が長い程大きくなるように形成したロボットである。
【0011】
請求項2に係る発明は、電気的動作をすることで発熱する発熱源を内部に備えたロボットにおいて、前記発熱源の発熱をロボットの外装部に直接伝導する熱伝導手段と、前記ロボットの外装部の温度を測定する温度測定手段と、前記温度測定手段により測定された温度が所定の温度以上になったとき、前記ロボットの動作を通常動作から前記発熱源の発熱量の低減につながる動作に切り換える手段とを備えたロボットである。
【発明の効果】
【0012】
本発明は以上のように、電気的動作をすることで発熱する発熱源を内部に備えたロボットにおいて、前記発熱源の発熱を吸収する熱吸収部と、前記ロボットの外装部に放熱する複数の放熱部と、前記熱吸収部から前記各放熱部へ熱を伝導する熱伝導部とで構成される熱伝導手段を備え、前記熱伝導部を、該熱伝導部の断面積が、前記熱吸収部から前記放熱部に至る前記熱伝導部の経路長が長い程大きくなるように形成したので、ロボット内部に備えた発熱源の発熱をロボットの外装部に放熱することができ、しかも、各放熱部で放熱される熱量にバラツキが少ないため、ロボットに「ぬくもり」(温度)を与えることができて、使用者がロボットの「体温」を感じ取ることができる効果がある。
【図面の簡単な説明】
【0013】
【図1】本発明のロボットの一実施形態を示す斜視図である。
【図2】ロボットの駆動基体を示す斜視図である。
【図3】ロボットの制御装置を示すブロック図である。
【図4】ロボットの胴体部内に設置されるCPUボードを示す概略図である。
【図5】熱伝導板を示す概略図である。
【図6】ロボットの胴体部の腹部を示す断面図である。
【図7】ロボットの腹部の外装部分の詳細を示す断面図である。
【図8】外装温度センサの温度データをもとにCPUチップを制御するプログラムを示すフローチャートである。
【図9】外装温度センサの温度データをもとにモータドライバに関して全体の動作を制御するプログラムを示すフローチャートである。
【図10】燃料電池を発熱源とする実施形態についてのロボットの腹部を示す断面図である。
【発明を実施するための形態】
【0014】
本発明の実施の形態を、図面を参照して説明する。
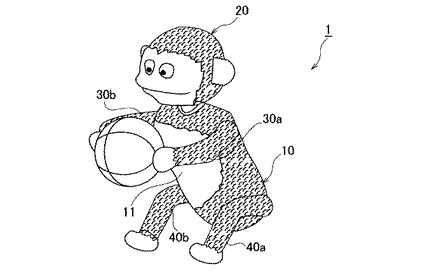
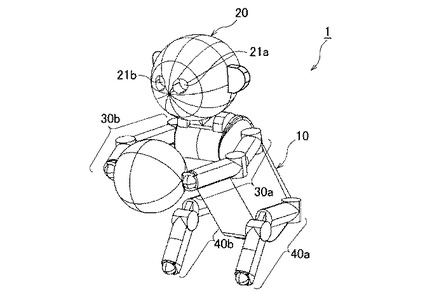
図1は、本発明のロボットの一実施形態を示す斜視図、図2はその駆動基体を示す斜視図であり、このロボット1は、図1に示すように、猿の形態をした癒し系のロボットである。
【0015】
図2に示すように、ロボット1の駆動基体は、胴体部10、頭部20および4本の脚部30,40(前脚30a,30bおよび後脚40a,40b)で構成される。
【0016】
頭部20の目に相当する部位には、CCDカメラ21a,21bが取り付けられている。また、頭部20は、胴体部10に取り付けられる首に相当する部位が、ヨー(回動する)とピッチ(前後に動く)の2自由度に構成されている。
【0017】
各前脚30は、胴体部10に取り付けられる肩に相当する部位が、ピッチ(前後に動く)とロール(左右に動く)の2自由度に構成され、また、肘に相当する部位が、胴体部10の内側に曲がるようなロール方向の1自由度に構成されている。
【0018】
各後脚40は、胴体部10に取り付けられる脚の付け根に相当する部位が、ピッチ(前後に動く)とロール(左右に動く)の2自由度に構成され、また、膝に相当する部位が、ピッチ方向の1自由度に構成されている。
【0019】
このような各関節に相当する部位の自由度は、例えばモータなどの適宜のアクチュエータを用いることで実現可能であり、この種のアクチュエータ(モータ)およびその駆動機構は周知のものが利用可能であるから、その説明は省略する。
【0020】
また、前脚30a,30bの先部(手先)および後脚40a,40bの先部(足先)には、表面がゴムで覆われたタッチセンサ31a,31b,41a,41bが取り付けられ、手(前脚30a,30b)や足(後脚40a,40b)が床等に接触しているか否かを調べることが可能である。
【0021】
このような構造をなす駆動基体に外装を施すことで、図1に示すようなロボット1の外見形態が形成される。すなわち、頭部20の顔に相当する部位や、胴体部10の腹に相当する部位は、柔らかいゴムで覆われている。また、頭部20および胴体部10のこれ以外の部位や、前脚30a,30bの手首および後脚40a,40bの足首から先を除く部位は、毛皮のような毛足の長い繊維で覆われている。
【0022】
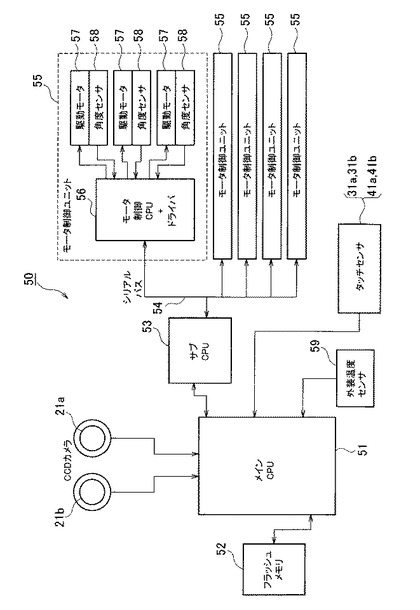
図3は、ロボット1の制御装置を示すブロック図であり、この制御装置50は、全体の制御を行うメインCPU51を備えている。メインCPU51には、フラッシュメモリ52およびサブCPU53が接続され、サブCPU53にはシリアルバス54を介して、14自由度の各モータ制御ユニット55が接続されている。
【0023】
ここで、「14自由度」とは、頭部20のヨーとピッチの2自由度、各前脚30の肩に相当する部位のピッチとロールの2自由度および肘に相当する部位のロール方向の1自由度、各後脚40の脚の付け根に相当する部位のピッチとロールの2自由度および膝に相当する部位のピッチ方向の1自由度、を合わせたものである。
【0024】
各モータ制御ユニット55は、モータ制御CPU56と、モータ制御CPU56に接続された駆動モータ57および角度センサ58とを備える。このようなモータ制御ユニット55は、14自由度にそれぞれ1個ずつ合計14個設けることもできるが、例えば、頭部20の2自由度に1つ、各前脚30の3自由度に1つずつ、各後脚40の3自由度に1つずつ、の合計5個で構成することができる。
【0025】
例えば、片方の前脚30の3自由度に1つ設けたモータ制御ユニット55を例に挙げて説明すると、図3に示すように、モータ制御CPU56には、肩ピッチギアモータとしての駆動モータ57および肩ピッチ回転センサとしての角度センサ58と、肩ロールギアモータとしての駆動モータ57および肩ロール回転センサとしての角度センサ58と、肘ロールギアモータとしての駆動モータ57および肘ロール回転センサとしての角度センサ58とが接続される。
【0026】
制御装置50を歩行に関して説明すると、メインCPU51は、フラッシュメモリ52に記憶してある歩行プログラムに基づいて、所定のタイミングで各関節の角度の目標値を生成し、これをサブCPU53に送るものである。また、サブCPU53は、メインCPU51から送られた目標角度データをシリアル変換して各モータ制御ユニット55のモータ制御CPU56に送るものである。
【0027】
各モータ制御ユニット55のモータ制御CPU56は、サブCPU53から送られた目標角度データと、各関節に取り付けられた角度センサ58の出力とを比較して、両者が同じになるように駆動モータ57の回転を制御するものである。これにより、各関節は歩行プログラムに基づく所定の角度となるように制御される。
【0028】
また、メインCPU51には、CCDカメラ(撮像手段)21a,21bが接続され、CCDカメラ21a,21bで得られた画像データを取り込んでフラッシュメモリ52に記録する。
【0029】
また、メインCPU51には、タッチセンサ31a,31b,41a,41bが接続され、さらに、ロボット1の外装部材またはそれに近い位置に取り付けた外装温度センサ59が接続され、この外装温度センサ59の温度データを読み取ることで、メインCPU51は、ロボット1表面の温度を検出できるようになっている。
【0030】
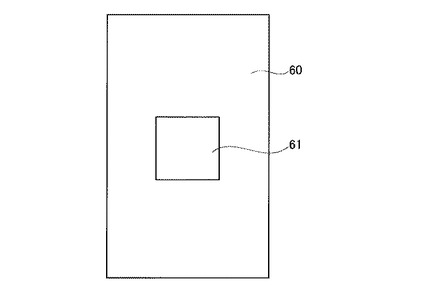
図4は、ロボット1の胴体部10内に設置されるCPUボードを示す概略図であり、このCPUボード60は、胴体部10の腹に相当する部位11(図1参照)に近い内部に設置され、大きさは、胴体部10の柔らかいゴムで覆われた腹面の約60%の面積である。
【0031】
CPUボード60の中央には、CPUチップ61が配置されている。通常、CPUは電流消費量が多く、発熱量も多い。従来はファンなどを内蔵させて冷やすことが多かったが、このロボット1では、熱伝導板を使ってCPUの熱を有効利用する。
【0032】
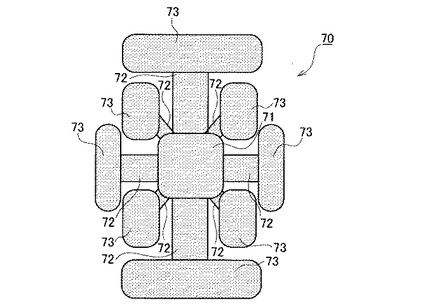
図5は、熱伝導板を示す概略図であり、この熱伝導板70は、熱伝導率の良い金属材料で構成される。熱伝導板70は、中央にCPUチップ61の発熱を吸収する熱吸収部71を備え、熱吸収部71から熱を伝導する熱伝導部72が放射状に広がり、熱伝導部72の先端には、ロボット1の外装部に放熱する放熱部73を備えている。
【0033】
各放熱部73における温度がほぼ同じになるように、放熱部73の位置が熱吸収部71に近い場合の熱伝導部72は細くしてその断面積を小さくし、また、放熱部73の位置が熱吸収部71から遠い場合の熱伝導部72は太くしてその断面積を大きくして、熱を伝え易くしている。
【0034】
すなわち、熱伝導部72は、熱吸収部71から放熱部73に至る熱伝導部72の経路長が長い程、熱伝導部72の断面積が大きくなるように形成してあり、これにより、熱伝導経路長が長い熱伝導部72である程、熱をより伝え易くしてある。
【0035】
これとは別の方法として、熱伝導部72の各部に熱伝導率の異なる材料を使用し、熱伝導経路長が長い熱伝導部72である程、熱伝導率の良い材料を用いることで、熱伝導経路長が長い熱伝導部72である程、熱をより伝え易くすることもできる。
【0036】
いずれの方法によっても、各放熱部73における温度をほぼ同じにすることが可能である。
【0037】
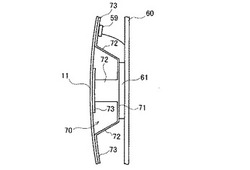
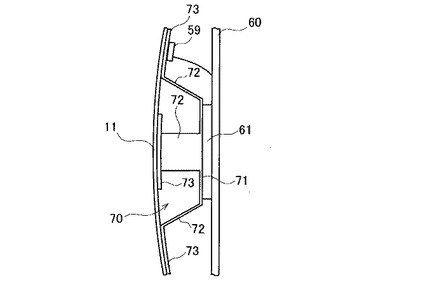
図6は、ロボット1の胴体部10の腹部11を示す断面図であり、CPUボード60は腹部11の外装近くに配置されている。CPUボード60の中央にはCPUチップ61がマウントされ、熱伝導板70の熱吸収部71がCPUチップ61のパッケージに接触して配置されている。熱吸収部71とCPUチップ61との間にはシリコングリスを塗布することで、熱伝導を良くする事が望ましい。
【0038】
熱伝導板70は、CPUチップ61に接触した熱吸収部71から、熱伝導部72が腹部11の外装に向けて屈曲して延び、熱伝導部72の先端から放熱部73が、腹部11の外装に沿って屈曲してその外装に接触して配置されている。このような熱伝導板70は、一部が接着やねじ止めされていると組み立てやすい。
【0039】
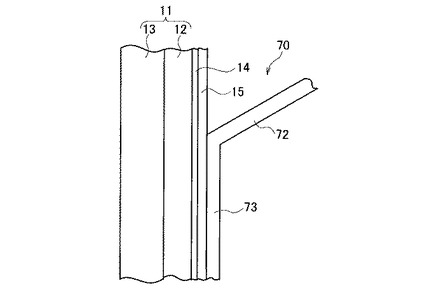
図7は、ロボット1の腹部11の外装部分の詳細を示す断面図であり、腹部11の構造部材となる外装プラスチック12の内側には、熱伝導板70の放熱部73から外装部分に均一的に熱を伝えるため、接着剤14によってアルミシート15が貼られている。接着剤14は熱伝導率が高く、薄く塗布されていることが望ましい。
【0040】
このアルミシート15に熱伝導板70の放熱部73が接触してCPUチップ61の熱を伝える。アルミシート15と放熱部73の間にはシリコングリスを塗布することで、熱伝導を良くする事が望ましい。
【0041】
外装プラスチック12の外側には軟質の表面ゴム13が張られている。これは接着でも良いが一体的に成型されている方が良い。この表面ゴム13も熱伝導率が高い方が望ましい。この構造により、ぬくもりを持った柔らかい肌のような質感を出すことができる。
【0042】
ここでは、発熱源としてCPUチップ61について説明したが、モータードライバICなども発熱量が多いので、例えば、ロボット1の尻に相当する部位など他の部分に熱伝導板により熱を伝えることが可能である。
【0043】
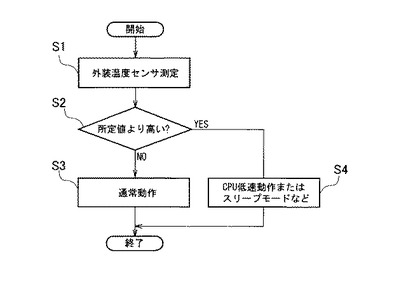
図8は、外装温度センサの温度データをもとにCPUチップを制御するプログラムのフローチャートを示す。
【0044】
まず、外装部に取り付けた外装温度センサ59の出力をCPUチップ61に取り込む(ステップS1)。外装温度センサ59はサーミスタなどでよく、その出力を増幅・オフセット調整してAD変換してCPUチップ61に取り込む。
【0045】
この温度データが所定値以下であれば(ステップS2のNO)、通常動作を行わせる(ステップS3)。
【0046】
一方、この温度データが所定値より高い場合には(ステップS2のYES)、ぬくもり感より熱く感じてしまうので、CPUのクロック周波数を下げたり、一部の機能を停止させて駆動電流を下げる(ステップS4)。
【0047】
このとき、使用者にはロボットが疲れたので少し休むイメージの表現をさせると動作を理解しやすく、違和感がない。"首を振ってからぐったりする"動作や音声出力が可能であれば、疲れたと発音させればよい。
【0048】
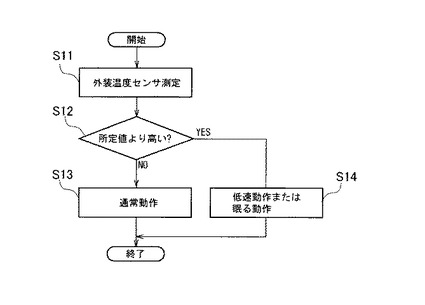
図9は、外装温度センサの温度データをもとにモータドライバに関して全体の動作を制御するプログラムのフローチャートを示す。
【0049】
まず、外装部に取り付けた外装温度センサ59の出力をCPUチップ61に取り込む(ステップS11)。
【0050】
この温度データが所定値以下であれば(ステップS12のNO)、通常動作を行わせる(ステップS13)。
【0051】
一方、この温度データが所定値より高い場合には(ステップS12のYES)、ぬくもり感より熱く感じてしまうので、関節駆動動作のスピードを下げるか、動作そのものを停止させて駆動電流を下げる(ステップS14)。
【0052】
このとき、使用者にはロボットが疲れたので少し休むイメージの表現をさせると動作を理解しやすく、違和感がない。"首を振ってからぐったりする"動作や音声出力が可能であれば、疲れたと発音させればよい。
【0053】
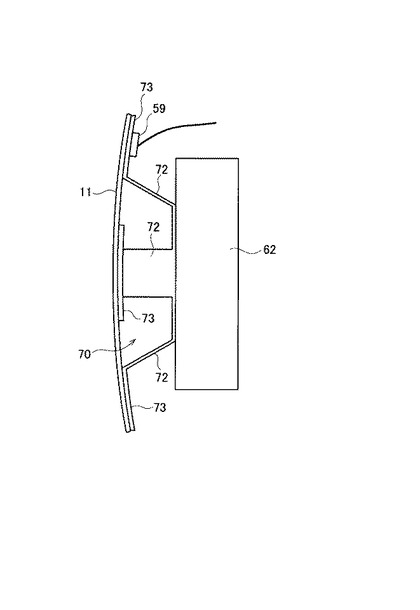
図10は、燃料電池を発熱源とする実施形態についてのロボット1の腹部11を示す断面図である。
【0054】
燃料電池62は発電時に熱を発生するので、発熱源として利用することができる。この場合は、燃料電池62の発熱面に熱伝導板70の熱吸収部71を接触して配置し、その他は図6と同様に構成することができる。
【0055】
本発明のロボット1は、上記のように構成されているので、下記のような各種の作用効果がある。
【0056】
(1)ぬくもりのあるロボットを実現できるので癒し効果が高い。
【0057】
(2)CPUやモータドライバの熱をロボットの体温に見立てて利用するので、発熱デバイスが不要であり、そのための電力も不要で効率が良い。
【0058】
(3)熱伝導板の構造により、外装部の熱分布が比較的均一になる。
【0059】
(4)毛皮質の部分には熱を伝えず、熱を利用する効率が良いし、CPUなどの冷却効果も上がる。
【0060】
(5)毛皮質の部分の質感とぬくもりのある柔らか肌の質感を同時に表現できるので癒し効果が高い。
【0061】
(6)センサとCPUにより温度を制御できるので、熱くなったり冷えたりせず、良好な癒しロボットを実現できるし、熱くならないので安全である。
【技術分野】
【0001】
本発明は、ロボットセラピーなどに使用されると好適な癒し系のロボットに関するものである。
【背景技術】
【0002】
従来から、アニマルセラピーの効果を衛生的かつ安全に実現するため、ロボットセラピーの研究が進んでいる。また、高齢者の癒しなどにロボットセラピーが実際に導入され始めている。そして、ロボットセラピーの効果を上げるためには、ロボットのもつ「ぬくもり」(肌触りと温度)が大切になっている。
一方、ロボットの温度を制御する技術については、従来から提案されている(例えば、特許文献1参照。)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平6−126672号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記のような従来の温度制御技術は、ロボットの関節を待機温度から動作可能温度まで短時間で昇温させる宇宙用ロボットについてのものであり、ロボットセラピーなどに使用される癒し系のロボットに必要な「ぬくもり」(肌触りと温度)とは無縁のものである。
【0005】
また、従来の癒し系のロボットには、肌触りを良くするため、人工的な毛皮などが使われているものがある。このようなロボットは、肌触りとしては良好なものであるが、ロボットの「体温」は全く管理されていない。
【0006】
そのため、このような従来のロボットの場合、その表面のほぼ全域が冷たくて、使用者がロボットの「体温」を感じ取ることができないという問題がある。
【0007】
また、従来のロボットの中には、ロボット内部の発熱源による影響で、表面のごく一部が熱く感じられる程度まで温度上昇してしまう場合もある。
【0008】
いずれにしても、従来のロボットは、外見的には動物に擬態させてあっても、使用者が動物のもつ体温を感じ取ることができないものであり、したがって、動物に接触している感覚とはほど遠いものであった。
【0009】
そこで、本発明が解決しようとする課題は、ロボットに「ぬくもり」(温度)を与えることで、使用者がロボットの「体温」を感じ取ることができ、その結果、動物に接触している感覚に近いロボットを提供することにある。
【課題を解決するための手段】
【0010】
本発明は上記課題を解決するものであって、請求項1に係る発明は、電気的動作をすることで発熱する発熱源を内部に備えたロボットにおいて、前記発熱源の発熱を吸収する熱吸収部と、前記ロボットの外装部に放熱する複数の放熱部と、前記熱吸収部から前記各放熱部へ熱を伝導する熱伝導部とで構成される熱伝導手段を備え、前記熱伝導部を、該熱伝導部の断面積が、前記熱吸収部から前記放熱部に至る前記熱伝導部の経路長が長い程大きくなるように形成したロボットである。
【0011】
請求項2に係る発明は、電気的動作をすることで発熱する発熱源を内部に備えたロボットにおいて、前記発熱源の発熱をロボットの外装部に直接伝導する熱伝導手段と、前記ロボットの外装部の温度を測定する温度測定手段と、前記温度測定手段により測定された温度が所定の温度以上になったとき、前記ロボットの動作を通常動作から前記発熱源の発熱量の低減につながる動作に切り換える手段とを備えたロボットである。
【発明の効果】
【0012】
本発明は以上のように、電気的動作をすることで発熱する発熱源を内部に備えたロボットにおいて、前記発熱源の発熱を吸収する熱吸収部と、前記ロボットの外装部に放熱する複数の放熱部と、前記熱吸収部から前記各放熱部へ熱を伝導する熱伝導部とで構成される熱伝導手段を備え、前記熱伝導部を、該熱伝導部の断面積が、前記熱吸収部から前記放熱部に至る前記熱伝導部の経路長が長い程大きくなるように形成したので、ロボット内部に備えた発熱源の発熱をロボットの外装部に放熱することができ、しかも、各放熱部で放熱される熱量にバラツキが少ないため、ロボットに「ぬくもり」(温度)を与えることができて、使用者がロボットの「体温」を感じ取ることができる効果がある。
【図面の簡単な説明】
【0013】
【図1】本発明のロボットの一実施形態を示す斜視図である。
【図2】ロボットの駆動基体を示す斜視図である。
【図3】ロボットの制御装置を示すブロック図である。
【図4】ロボットの胴体部内に設置されるCPUボードを示す概略図である。
【図5】熱伝導板を示す概略図である。
【図6】ロボットの胴体部の腹部を示す断面図である。
【図7】ロボットの腹部の外装部分の詳細を示す断面図である。
【図8】外装温度センサの温度データをもとにCPUチップを制御するプログラムを示すフローチャートである。
【図9】外装温度センサの温度データをもとにモータドライバに関して全体の動作を制御するプログラムを示すフローチャートである。
【図10】燃料電池を発熱源とする実施形態についてのロボットの腹部を示す断面図である。
【発明を実施するための形態】
【0014】
本発明の実施の形態を、図面を参照して説明する。
図1は、本発明のロボットの一実施形態を示す斜視図、図2はその駆動基体を示す斜視図であり、このロボット1は、図1に示すように、猿の形態をした癒し系のロボットである。
【0015】
図2に示すように、ロボット1の駆動基体は、胴体部10、頭部20および4本の脚部30,40(前脚30a,30bおよび後脚40a,40b)で構成される。
【0016】
頭部20の目に相当する部位には、CCDカメラ21a,21bが取り付けられている。また、頭部20は、胴体部10に取り付けられる首に相当する部位が、ヨー(回動する)とピッチ(前後に動く)の2自由度に構成されている。
【0017】
各前脚30は、胴体部10に取り付けられる肩に相当する部位が、ピッチ(前後に動く)とロール(左右に動く)の2自由度に構成され、また、肘に相当する部位が、胴体部10の内側に曲がるようなロール方向の1自由度に構成されている。
【0018】
各後脚40は、胴体部10に取り付けられる脚の付け根に相当する部位が、ピッチ(前後に動く)とロール(左右に動く)の2自由度に構成され、また、膝に相当する部位が、ピッチ方向の1自由度に構成されている。
【0019】
このような各関節に相当する部位の自由度は、例えばモータなどの適宜のアクチュエータを用いることで実現可能であり、この種のアクチュエータ(モータ)およびその駆動機構は周知のものが利用可能であるから、その説明は省略する。
【0020】
また、前脚30a,30bの先部(手先)および後脚40a,40bの先部(足先)には、表面がゴムで覆われたタッチセンサ31a,31b,41a,41bが取り付けられ、手(前脚30a,30b)や足(後脚40a,40b)が床等に接触しているか否かを調べることが可能である。
【0021】
このような構造をなす駆動基体に外装を施すことで、図1に示すようなロボット1の外見形態が形成される。すなわち、頭部20の顔に相当する部位や、胴体部10の腹に相当する部位は、柔らかいゴムで覆われている。また、頭部20および胴体部10のこれ以外の部位や、前脚30a,30bの手首および後脚40a,40bの足首から先を除く部位は、毛皮のような毛足の長い繊維で覆われている。
【0022】
図3は、ロボット1の制御装置を示すブロック図であり、この制御装置50は、全体の制御を行うメインCPU51を備えている。メインCPU51には、フラッシュメモリ52およびサブCPU53が接続され、サブCPU53にはシリアルバス54を介して、14自由度の各モータ制御ユニット55が接続されている。
【0023】
ここで、「14自由度」とは、頭部20のヨーとピッチの2自由度、各前脚30の肩に相当する部位のピッチとロールの2自由度および肘に相当する部位のロール方向の1自由度、各後脚40の脚の付け根に相当する部位のピッチとロールの2自由度および膝に相当する部位のピッチ方向の1自由度、を合わせたものである。
【0024】
各モータ制御ユニット55は、モータ制御CPU56と、モータ制御CPU56に接続された駆動モータ57および角度センサ58とを備える。このようなモータ制御ユニット55は、14自由度にそれぞれ1個ずつ合計14個設けることもできるが、例えば、頭部20の2自由度に1つ、各前脚30の3自由度に1つずつ、各後脚40の3自由度に1つずつ、の合計5個で構成することができる。
【0025】
例えば、片方の前脚30の3自由度に1つ設けたモータ制御ユニット55を例に挙げて説明すると、図3に示すように、モータ制御CPU56には、肩ピッチギアモータとしての駆動モータ57および肩ピッチ回転センサとしての角度センサ58と、肩ロールギアモータとしての駆動モータ57および肩ロール回転センサとしての角度センサ58と、肘ロールギアモータとしての駆動モータ57および肘ロール回転センサとしての角度センサ58とが接続される。
【0026】
制御装置50を歩行に関して説明すると、メインCPU51は、フラッシュメモリ52に記憶してある歩行プログラムに基づいて、所定のタイミングで各関節の角度の目標値を生成し、これをサブCPU53に送るものである。また、サブCPU53は、メインCPU51から送られた目標角度データをシリアル変換して各モータ制御ユニット55のモータ制御CPU56に送るものである。
【0027】
各モータ制御ユニット55のモータ制御CPU56は、サブCPU53から送られた目標角度データと、各関節に取り付けられた角度センサ58の出力とを比較して、両者が同じになるように駆動モータ57の回転を制御するものである。これにより、各関節は歩行プログラムに基づく所定の角度となるように制御される。
【0028】
また、メインCPU51には、CCDカメラ(撮像手段)21a,21bが接続され、CCDカメラ21a,21bで得られた画像データを取り込んでフラッシュメモリ52に記録する。
【0029】
また、メインCPU51には、タッチセンサ31a,31b,41a,41bが接続され、さらに、ロボット1の外装部材またはそれに近い位置に取り付けた外装温度センサ59が接続され、この外装温度センサ59の温度データを読み取ることで、メインCPU51は、ロボット1表面の温度を検出できるようになっている。
【0030】
図4は、ロボット1の胴体部10内に設置されるCPUボードを示す概略図であり、このCPUボード60は、胴体部10の腹に相当する部位11(図1参照)に近い内部に設置され、大きさは、胴体部10の柔らかいゴムで覆われた腹面の約60%の面積である。
【0031】
CPUボード60の中央には、CPUチップ61が配置されている。通常、CPUは電流消費量が多く、発熱量も多い。従来はファンなどを内蔵させて冷やすことが多かったが、このロボット1では、熱伝導板を使ってCPUの熱を有効利用する。
【0032】
図5は、熱伝導板を示す概略図であり、この熱伝導板70は、熱伝導率の良い金属材料で構成される。熱伝導板70は、中央にCPUチップ61の発熱を吸収する熱吸収部71を備え、熱吸収部71から熱を伝導する熱伝導部72が放射状に広がり、熱伝導部72の先端には、ロボット1の外装部に放熱する放熱部73を備えている。
【0033】
各放熱部73における温度がほぼ同じになるように、放熱部73の位置が熱吸収部71に近い場合の熱伝導部72は細くしてその断面積を小さくし、また、放熱部73の位置が熱吸収部71から遠い場合の熱伝導部72は太くしてその断面積を大きくして、熱を伝え易くしている。
【0034】
すなわち、熱伝導部72は、熱吸収部71から放熱部73に至る熱伝導部72の経路長が長い程、熱伝導部72の断面積が大きくなるように形成してあり、これにより、熱伝導経路長が長い熱伝導部72である程、熱をより伝え易くしてある。
【0035】
これとは別の方法として、熱伝導部72の各部に熱伝導率の異なる材料を使用し、熱伝導経路長が長い熱伝導部72である程、熱伝導率の良い材料を用いることで、熱伝導経路長が長い熱伝導部72である程、熱をより伝え易くすることもできる。
【0036】
いずれの方法によっても、各放熱部73における温度をほぼ同じにすることが可能である。
【0037】
図6は、ロボット1の胴体部10の腹部11を示す断面図であり、CPUボード60は腹部11の外装近くに配置されている。CPUボード60の中央にはCPUチップ61がマウントされ、熱伝導板70の熱吸収部71がCPUチップ61のパッケージに接触して配置されている。熱吸収部71とCPUチップ61との間にはシリコングリスを塗布することで、熱伝導を良くする事が望ましい。
【0038】
熱伝導板70は、CPUチップ61に接触した熱吸収部71から、熱伝導部72が腹部11の外装に向けて屈曲して延び、熱伝導部72の先端から放熱部73が、腹部11の外装に沿って屈曲してその外装に接触して配置されている。このような熱伝導板70は、一部が接着やねじ止めされていると組み立てやすい。
【0039】
図7は、ロボット1の腹部11の外装部分の詳細を示す断面図であり、腹部11の構造部材となる外装プラスチック12の内側には、熱伝導板70の放熱部73から外装部分に均一的に熱を伝えるため、接着剤14によってアルミシート15が貼られている。接着剤14は熱伝導率が高く、薄く塗布されていることが望ましい。
【0040】
このアルミシート15に熱伝導板70の放熱部73が接触してCPUチップ61の熱を伝える。アルミシート15と放熱部73の間にはシリコングリスを塗布することで、熱伝導を良くする事が望ましい。
【0041】
外装プラスチック12の外側には軟質の表面ゴム13が張られている。これは接着でも良いが一体的に成型されている方が良い。この表面ゴム13も熱伝導率が高い方が望ましい。この構造により、ぬくもりを持った柔らかい肌のような質感を出すことができる。
【0042】
ここでは、発熱源としてCPUチップ61について説明したが、モータードライバICなども発熱量が多いので、例えば、ロボット1の尻に相当する部位など他の部分に熱伝導板により熱を伝えることが可能である。
【0043】
図8は、外装温度センサの温度データをもとにCPUチップを制御するプログラムのフローチャートを示す。
【0044】
まず、外装部に取り付けた外装温度センサ59の出力をCPUチップ61に取り込む(ステップS1)。外装温度センサ59はサーミスタなどでよく、その出力を増幅・オフセット調整してAD変換してCPUチップ61に取り込む。
【0045】
この温度データが所定値以下であれば(ステップS2のNO)、通常動作を行わせる(ステップS3)。
【0046】
一方、この温度データが所定値より高い場合には(ステップS2のYES)、ぬくもり感より熱く感じてしまうので、CPUのクロック周波数を下げたり、一部の機能を停止させて駆動電流を下げる(ステップS4)。
【0047】
このとき、使用者にはロボットが疲れたので少し休むイメージの表現をさせると動作を理解しやすく、違和感がない。"首を振ってからぐったりする"動作や音声出力が可能であれば、疲れたと発音させればよい。
【0048】
図9は、外装温度センサの温度データをもとにモータドライバに関して全体の動作を制御するプログラムのフローチャートを示す。
【0049】
まず、外装部に取り付けた外装温度センサ59の出力をCPUチップ61に取り込む(ステップS11)。
【0050】
この温度データが所定値以下であれば(ステップS12のNO)、通常動作を行わせる(ステップS13)。
【0051】
一方、この温度データが所定値より高い場合には(ステップS12のYES)、ぬくもり感より熱く感じてしまうので、関節駆動動作のスピードを下げるか、動作そのものを停止させて駆動電流を下げる(ステップS14)。
【0052】
このとき、使用者にはロボットが疲れたので少し休むイメージの表現をさせると動作を理解しやすく、違和感がない。"首を振ってからぐったりする"動作や音声出力が可能であれば、疲れたと発音させればよい。
【0053】
図10は、燃料電池を発熱源とする実施形態についてのロボット1の腹部11を示す断面図である。
【0054】
燃料電池62は発電時に熱を発生するので、発熱源として利用することができる。この場合は、燃料電池62の発熱面に熱伝導板70の熱吸収部71を接触して配置し、その他は図6と同様に構成することができる。
【0055】
本発明のロボット1は、上記のように構成されているので、下記のような各種の作用効果がある。
【0056】
(1)ぬくもりのあるロボットを実現できるので癒し効果が高い。
【0057】
(2)CPUやモータドライバの熱をロボットの体温に見立てて利用するので、発熱デバイスが不要であり、そのための電力も不要で効率が良い。
【0058】
(3)熱伝導板の構造により、外装部の熱分布が比較的均一になる。
【0059】
(4)毛皮質の部分には熱を伝えず、熱を利用する効率が良いし、CPUなどの冷却効果も上がる。
【0060】
(5)毛皮質の部分の質感とぬくもりのある柔らか肌の質感を同時に表現できるので癒し効果が高い。
【0061】
(6)センサとCPUにより温度を制御できるので、熱くなったり冷えたりせず、良好な癒しロボットを実現できるし、熱くならないので安全である。
【特許請求の範囲】
【請求項1】
電気的動作をすることで発熱する発熱源を内部に備えたロボットにおいて、
前記発熱源の発熱をロボットの外装部に伝導する熱伝導手段と、
前記ロボットの外装部の温度を測定する温度測定手段と、
前記温度測定手段により測定された温度が所定の温度以上になったとき、前記ロボットの動作を通常動作から前記発熱源の発熱量の低減につながる動作に切り換える手段と、を備えたことを特徴とするロボット。
【請求項1】
電気的動作をすることで発熱する発熱源を内部に備えたロボットにおいて、
前記発熱源の発熱をロボットの外装部に伝導する熱伝導手段と、
前記ロボットの外装部の温度を測定する温度測定手段と、
前記温度測定手段により測定された温度が所定の温度以上になったとき、前記ロボットの動作を通常動作から前記発熱源の発熱量の低減につながる動作に切り換える手段と、を備えたことを特徴とするロボット。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2009−160730(P2009−160730A)
【公開日】平成21年7月23日(2009.7.23)
【国際特許分類】
【出願番号】特願2009−104878(P2009−104878)
【出願日】平成21年4月23日(2009.4.23)
【分割の表示】特願2003−408065(P2003−408065)の分割
【原出願日】平成15年12月5日(2003.12.5)
【出願人】(000004329)日本ビクター株式会社 (3,896)
【Fターム(参考)】
【公開日】平成21年7月23日(2009.7.23)
【国際特許分類】
【出願日】平成21年4月23日(2009.4.23)
【分割の表示】特願2003−408065(P2003−408065)の分割
【原出願日】平成15年12月5日(2003.12.5)
【出願人】(000004329)日本ビクター株式会社 (3,896)
【Fターム(参考)】
[ Back to top ]