
ロボット
【課題】 軽量、安全かつ優れた制御性能を共に達成することができるロボットを提供することを目的とする。
【解決手段】 本体1と、3自由度変位できる肩関節部2と、上腕リンク3と、2自由度変位できる肘関節部4と、前腕リンク5と、を備え、すべてのアクチュエータが前記本体1に設置され、前記アクチュエータが4本以上の一関節筋11〜14を介して前記肩関節部2と前記上腕リンク3とを駆動し、3本以上の二関節筋15〜17を介して前記肘関節部4と前記前腕リンク5とを駆動する。
【解決手段】 本体1と、3自由度変位できる肩関節部2と、上腕リンク3と、2自由度変位できる肘関節部4と、前腕リンク5と、を備え、すべてのアクチュエータが前記本体1に設置され、前記アクチュエータが4本以上の一関節筋11〜14を介して前記肩関節部2と前記上腕リンク3とを駆動し、3本以上の二関節筋15〜17を介して前記肘関節部4と前記前腕リンク5とを駆動する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ロボットに関する。
【背景技術】
【0002】
最近、サービスロボットおよび人協調産業ロボットの研究は盛んに行われている。これらのロボットは人間と直接に接するため、安全性の保証は重要になっている。ロボットシステムの安全性を保つため、ロボットの各関節は柔軟かつ軽量であることが要求される。そこで、従来技術は、駆動伝達経路に非線形バネ要素を挿入してワイヤ拮抗駆動を用いることにより、装置の柔軟化および軽量化を図っている(例えば、非特許文献1参照)。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】日本ロボット学会誌、Vol.14 No.8、p.1152−1159
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来は、ロボットがシリアルで構成され、1自由度を実現するため1つのリンクと1つの回転軸を設けたので、多自由度を実現するためリンクと回転軸のみだけではなくプーリとアイドルプーリも多く設ける必要があり、構造が複雑となる。また、より先端のリンクを駆動するワイヤはより最基端部に近いすべてのリンクに設置されたプーリとアイドルプーリを通す必要があるため、摩擦によるエネルギー損失とワイヤの磨耗が大きいという問題があった。
本発明はこのような問題点に鑑みてなされたものであり、多自由度関節とパラレル駆動ユニットを用いて関節数とリンク数を減らし、そして動力源であるモータなどのアクチュエータを本体に固定して関節筋(ワイヤなどの柔軟に力を伝達するものを称す)を通してアームを駆動することでアームを軽量化することができる。また、各駆動ユニットに非線形バネ要素を挿入し、関節の自由度数より1つ以上多い駆動ユニットを用いて拮抗に関節とリンクを駆動制御することによって、アームの姿勢と剛性を目標指令に独立かつ正確に追従させ、良好な安全性と優れた制御性能を共に達成することができるロボットを提供することを目的とする。
【課題を解決するための手段】
【0005】
上記問題を解決するため、本発明は、次のように構成したのである。
請求項1に記載の発明は、本体と、3自由度変位できる肩関節部と、上腕リンクと、2自由度変位できる肘関節部と、前腕リンクと、を備え、すべてのアクチュエータが前記本体に設置され、前記アクチュエータが4本以上の一関節筋を介して前記肩関節部と前記上腕リンクとを駆動し、3本以上の二関節筋を介して前記肘関節部と前記前腕リンクとを駆動するものである。
また、請求項2に記載の発明は、本体と、3自由度変位できる肩関節部と、上腕リンクと、1自由度変位できる肘関節部と、前腕リンクと、3自由度変位できる手首部と、ハンドとを備え、アクチュエータが前記本体に設置され、前記アクチュエータが4本以上の一関節筋を介して前記肩関節部と前記上腕リンクとを駆動し、少なくとも2本の二関節筋を介して前記肘関節部と前記前腕リンクとを駆動し、少なくとも4本の三関節筋を介して前記手首部と前記ハンドとを駆動するものである。
また、請求項3に記載の発明は、前記肩関節部は、受部材が前記本体に固定され球体部が前記上腕リンクに連結された球面ジョイントと、前記球面ジョイントの球体部を包むように一端が本体に固定され残りの一端が前記上腕リンクに固定された3本以上の靭帯とで、構成されるものである。
また、請求項4に記載の発明は、前記球面ジョイントは、受部材の両側面が受部材の球面の中心を挟まないものである。
また、請求項5に記載の発明は、前記靭帯は、編みチューブ中に伸縮可能な弾性体を挿入して構成されるものである。
また、請求項6に記載の発明は、前記肘関節部は、回転軸が互いに垂直する軸継手である折れ回動ジョイントと軸回転ジョイントとで構成されるものである。
また、請求項7に記載の発明は、前記肘関節部は、差動機構で構成され、2本の前記二関節筋を各々2つのサイドギアに連結された2つのプーリに巻くものである。
また、請求項8に記載の発明は、前記手首部は、軸回転ジョイントとユニバーサルジョイントとで構成されるものである。
【発明の効果】
【0006】
多自由度関節とパラレル駆動ユニットを用いて関節数とリンク数を減らし、そして動力源であるモータなどのアクチュエータを本体に固定して関節筋(ワイヤなど)を通してアームを駆動することでアームを軽量化することができる。また、各駆動ユニットに非線形バネ要素を挿入し、関節の自由度数より1つ以上多い駆動ユニットを用いて拮抗に関節とリンクを駆動制御することによって、関節の姿勢角度と剛性を目標指令に独立かつ正確に追従させ、良好な安全性と優れた制御性能を共に達成することができる。
【図面の簡単な説明】
【0007】
【図1】本発明の第1実施例を示すロボットの構成図
【図2】本発明の第2実施例を示すロボットの構成図
【図3】本発明の第3実施例を示すロボットの構成図
【発明を実施するための形態】
【0008】
以下、本発明の実施の形態について図を参照して説明する。
【実施例1】
【0009】
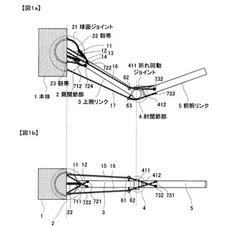
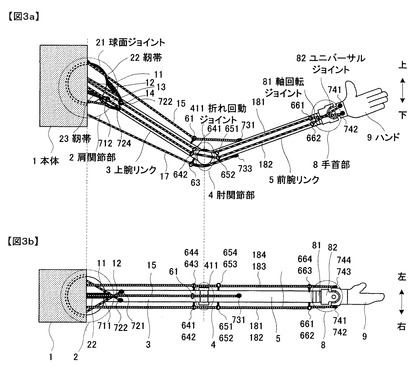
図1は、本発明の第1実施例を示すロボットの構成図である。図1aは正面図であり、図1bは平面図である。図において、本体1は、アームを駆動するモータなどの不図示のアクチュエータが設置されている。肩関節部2は、受部材が本体1に固定されている3自由度球面ジョイント21と球面ジョイント21の球体部を拘束する3本の靭帯22、23、24とで構成されている。肘関節部4は、回転軸が互いに垂直する軸継手である折れ回動ジョイント411と軸回転ジョイント412とで構成されて2自由度で動く。3は上腕リンク、5は前腕リンクである。11、12、13および14は一関節筋(以下、1つ関節を跨る関節筋を一関節筋、2つ関節を跨る関節筋を二関節筋、3つ関節を跨る関節筋を三関節筋と称す)、15、16および17は二関節筋である。ガイドピン61、62および63は、それぞれ二関節筋15、二関節筋16および二関節筋17が上腕リンク3から離れないにこの3つの二関節筋を拘束する。また、固定ピン711、712、713、721、722、723、724、731、732および733は、靭帯、一関節筋および二関節筋の先端を上腕リンク3或いは上腕リンク5に固定する。
【0010】
以下、ロボットの動作原理について説明する。
ロボットは本体1と、3自由度の肩関節部2と、2自由度の肘関節部4と、肩関節部2と肘関節部4とを連結する上腕リンク3と、肘関節部4と不図示の手首部とを連結する前腕リンク5と、上腕リンク3を引っ張る4つの一関節筋11、12、13、14と、前腕リンク5を引っ張る3つの二関節筋15、16、17とで構成されてある。動く部であるアームを軽量化するため、すべての動力源であるモータなどのアクチュエータが動かない部である本体1に設置され、関節筋(ワイヤなど)を介してアームを駆動する。
肩関節部2は、受部材が本体1に固定されている3自由度球面ジョイント21と球面ジョイント21の球体部を拘束する3本の靭帯22、24、25とで構成されている。普通の球面ジョイントはしっかり球体部を拘束するため受部材の両側面が球面中心を挟むように構成されるので、可動範囲が狭い。ここで、肩関節の可動範囲を拡張するために、受部材がカバーする面積を小さく(受部材の両側面が球面中心を挟まない)する。そのまますると、球面ジョイントの球体部が受部材の窪みから外れて戻れなくなり、すなわち脱臼しやすくなる。それで、少なくとも3本の靭帯22、23、24を球面ジョイント21の球体部を囲むように均等に設置する。靭帯は一端が本体に、残りの一端が上腕リンク3に固定ピンで固定され、そして一定な範囲内で伸縮できるように構成される。例えば、編みチューブ中に伸縮可能な弾性体を挿入する。このようにして、靭帯は関節筋の駆動にあまり妨げることがなく、負荷がない時弾力でアームの自重を負担し、球面ジョイントの球体部が受部材の窪みに常に接触するように働き、負荷が重い時も限界長度で球面ジョイントの球体部が完全に受部材の窪みから外れることを止めすなわち肩関節が脱臼しないように働く。
上腕リンク3は一端が球面ジョイント21の球体部に固定され、残りの一端が肘関節部に繋ぐ。4本の一関節筋11、12、13および14は各々一端が本体に配置された別々のアクチュエータに繋ぎ、残りの一端が止めピンによって上腕リンク3に固定されてある。また、一関節筋11と一関節筋12とおよび一関節筋13と一関節筋14とはそれぞれクロースになって互いに上腕リンク3と球面ジョイント21の球体部との両側に対称に配置されてある。また、1つのアクチュエータと1つの関節筋は1つの駆動ユニットになって、関節筋の張力を測るセンサーを付ければこの張力をフィードバック制御できる。この4本の一関節筋の張力を制御することによって、球面ジョイント21の受部材の窪みの球面中心点を中心にしたxyzの3軸まわりの回転トルクを発生し、上腕リンク3と球面ジョイント21の球体部を3自由度球面運動させる。
肘関節部4は、回転軸が互いに垂直する軸継手である折れ回動ジョイント411と軸回転ジョイント412とで構成されて上腕リンク3と前腕リンク5を連結する。ここで、折れ回動ジョイント411と軸回転ジョイント412とは設置位置が交換されてもよい。また、折れ回動ジョイント411の回転軸が上腕リンク3と垂直となり、軸回転ジョイント412の回転軸が前腕リンク5と平行になる。また、3つの二関節筋15、16および17は各々一端が本体に配置された別々のアクチュエータに繋ぎ、残りの一端が止めピンによって前腕リンク5に固定され、また中段がそれぞれ上腕リンク3に設置されたガイドピン61、62、63によって垂直方向に動かないように拘束されてある。また、アクチュエータとガイドピンとの間に各二関節筋がほぼ平行になり、ガイドピンと止めピンとの間に二関節筋15、16は交差するようになっている。
二関節筋15と二関節筋16とを同時に引っ張り二関節筋17を緩めると、或いは二関節筋15と二関節筋16を同時に緩め二関節筋17を引っ張ると折れ回動ジョイント411を回転させることによって肘に屈伸動作をさせる。また、二関節筋15と二関節筋16との一本を引っ張り残りの一本を緩めると軸回転ジョイント412および前腕リンク5に回転を与えてアームにツイスト動作をさせる。よって、3本の二関節筋を用いて肘関節部4と前腕リンク5に2自由度の運動をさせる。
【0011】
前述したように関節の自由度数より1つ多い関節筋を用いて各関節を拮抗駆動できる。また、各駆動ユニットのアクチュエータと関節筋との間に非線形バネ要素を挿入することで、関節の姿勢制御に影響を与えず関節の剛性も独立に調整できる。ここで、非線形バネとは、バネ定数が一定な値ではなく変位によって変わるものである。例えば、円錐コイルバネは伸縮量が大きくなるほどバネ定数が大きくなる。また、アームの運動性能に対する影響が大きく現れるのはアームが高加減速かつ低速度で変位する時である。一方、安全性に配慮すべきときはアームが高速度変位する時である。よって、剛性の目標指令は高速度変位時小さい値、高加減速かつ低速度変位時大きい値に与えればアームに良好な安全性と優れた制御性能を両立させることができる。
【実施例2】
【0012】
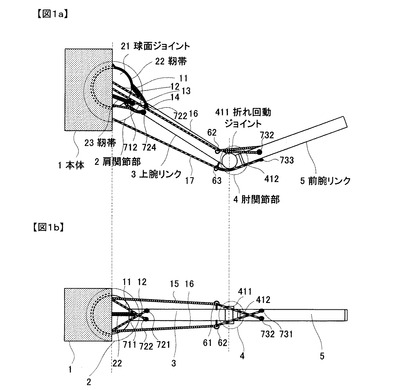
図2は本発明の第2実施例を示すロボットの構成図である。図2aは正面図であり、図2bは平面図である。図において、肘関節部4は差動機構42で構成され、フレーム421と、差動機構リンク422と、2つのプーリ423、424と、2つのサイドギア425、426と、ピニオンギア427とを含んである。また、図1と同一ものは同じ記号を付しその説明を省略する。
図2に示された本実施例のロボットは、肘関節部4が折れ回動ジョイント411および軸回転ジョイント412の代わりに差動機構42で構成されている。また、第1実施例のロボットにて二関節筋15と二関節筋16はそれぞれガイドピン61とガイドピン62を通した後クロスになって先端が前腕リンク5に固定され、本実施例のロボットにて二関節筋15と二関節筋16はそれぞれガイドピン61とガイドピン62を通した後そのまま並行になり各々の先端が差動機構42のプーリ423とプーリ424に固定されている。
【0013】
以下、動作原理について説明する。
肩関節部2と上腕リンク3の構成および動作原理は第1実施例と同じであるため、ここでその説明を省略する。
肘関節部4は差動機構42のフレーム421を持って上腕リンク3と連結し、また差動機構42のピニオンギア427を持って前腕リンク5と連結する。一方、支持軸428はフレーム421に固定されてある。また、プーリ423とプーリ424はそれぞれサイドギア425とサイドギア426と連結されてベアリングを介して支持軸428に設置されてある。そして、差動機構リンク422はベアリングを介してピニオンギア427と前腕リンク5との連結部および支持軸428と結合する。また、二関節筋15と二関節筋16はそれぞれ上腕リンク3に設置されたガイドピン61とガイドピン62を通した後プーリ423とプーリ424に固定される。一方、二関節筋17は上腕リンク3或いはフレーム421に設置されたガイドピン63を通した後前腕リンク5に固定される。
二関節筋15と二関節筋16を同時に引っ張り、二関節筋17が緩められると、プーリ423とプーリ424にはトルクが発生し、このトルクがサイドギア425とサイドギア426およびピニオンギア427を通して前腕リンク5に伝われて肘に曲げる動作をさせる。一方、二関節筋15、16を同時に緩め二関節筋17を引っ張ると二関節筋17の張力が直ちに前腕リンク5に伝われて肘に伸ばし動作をさせる。また、二関節筋15と二関節筋16との一本を引っ張り残りの一本を緩めると、サイドギア425とサイドギア426にトルクの差が発生し、その差がピニオンギア427および前腕リンク5に回転を与えてアームにツイスト動作をさせる。よって、3本の二関節筋を用いて肘関節部4と前腕リンク5に2自由度運動させる。
【0014】
前述したように関節の自由度数より1つ多い関節筋を用いて各関節を拮抗駆動できる。また、各駆動ユニットのアクチュエータと関節筋との間に非線形バネ要素を挿入することで、関節の姿勢制御に影響を与えず関節の剛性も独立に調整できる。また、アームの運動性能に対する影響が大きく現れるのはアームが高加減速かつ低速度で変位する時である。一方、安全性に配慮すべきときはアームが高速度変位する時である。よって、剛性の目標指令は高速度変位時小さい値、高加減速かつ低速度変位時大きい値に与えればアームに良好な安全性と優れた制御性能を両立させることができる。
【0015】
本実施例のロボットのツイスト動作範囲はプーリ423とプーリ424に巻き込まれる関節筋の量のみに限定されてプーリの大きさを十分大きくしてあれば広く取られる。
【実施例3】
【0016】
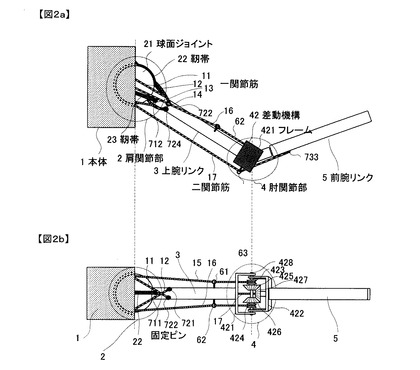
図3は本発明の第3実施例を示すロボットの構成図である。図3aは正面図であり、図3bは平面図である。図において、ロボットは肩関節部2と、上腕リンク3と、肘関節部4と、前腕リンク5との以外に前腕リンク5とハンド9とを連結する手首部8も含んである。手首部8は軸回転ジョイント81とユニバーサルジョイント82とで構成されて3自由度で動く。一方、肘関節部4は折れ回動ジョイント411のみで構成されて1自由度で動く。181、182、183および184は三関節筋である。ガイドピン641、642、643、644、651、652、653、654、661、662、663および664は、三関節筋181、182、183および184が上腕リンク3および前腕リンク5から離れないようにこの4つの三関節筋を拘束する。また、固定ピン741、742、743および744は、三関節筋の先端をハンド9に固定する。また、図1と同一ものは同じ記号を付しその説明を省略する。
【0017】
以下、動作原理について説明する。
ロボットは本体1と、3自由度の肩関節部2と、1自由度の肘関節部4と、3自由度の手首部8と、肩関節部2と肘関節部4とを連結する上腕リンク3と、肘関節部4と手首部8とを連結する前腕リンク5と、上腕リンク3を引っ張る4つの一関節筋11、12、13、14と、前腕リンク5を引っ張る2つの二関節筋15、17と、ハンド9を引っ張る4つの三関節筋181、182、183、184とで構成されてある。動く部であるアームを軽量化するため、すべての動力源であるモータなどのアクチュエータが動かない部である本体1に設置され、関節筋(ワイヤなど)を介してアームを駆動する。
肩関節部2と上腕リンク3の構成および動作原理は第1実施例と同じであるため、ここでその説明を省略する。
肘関節部4は、回転軸が上腕リンク3および前腕リンク5に垂直する軸継手である折れ回動ジョイント411で構成されて上腕リンク3と前腕リンク5を連結する。2つの二関節筋15と17は各々一端が本体に配置された別々のアクチュエータに繋ぎ、残りの一端が止めピンによって前腕リンク5に固定され、また中段がそれぞれ上腕リンク3に設置されたガイドピン61と63によって垂直方向に動かないように拘束され、そして回動ジョイント411の回転軸に垂直する平面において上下1本ずつ設置されている。
二関節筋15を引っ張り二関節筋17を緩めると、或いは二関節筋15を緩め二関節筋17を引っ張ると折れ回動ジョイント411を回転させることによって肘に屈伸動作をさせる。よって、2本の二関節筋を用いて肘関節部4と前腕リンク5には上腕リンク3に対する1自由度の運動をさせる。
手首部8は、回転軸が前腕リンク5と平行になる軸回転ジョイント81を持って前腕リンク5と連結し、またユニバーサルジョイント82を持ってハンド9と連結する。4つの三関節筋181、182、183、184は、各々一端が本体に配置された別々のアクチュエータに繋ぎ、残りの一端が止めピンによってハンド9に固定され、また中段が上腕リンク3に設置されたガイドピン641、642、643、644と、前腕リンク5に設置されたガイドピン651、652、653、654、661、662、663、664とによって垂直方向に動かないように拘束されてある。また、アクチュエータとガイドピンとの間および隣接するガイドピンの間に各三関節筋がほぼ平行になり、一方ガイドピン661、662と止めピン741、742との間に三関節筋181、182は交差し、ガイドピン663、663と止めピン743、744との間に三関節筋183、184は交差するようになっている。
三関節筋181と三関節筋182とを同時に引っ張り三関節筋183と三関節筋184とを同時に緩めると、或いは三関節筋181と三関節筋182とを同時に緩め三関節筋183と三関節筋184とを同時に引っ張るとユニバーサルジョイント82を上下方向の回転軸まわりに回転させることによってハンド9に左右振り動作をさせる。一方、三関節筋181と三関節筋183とを同時に引っ張り三関節筋182と三関節筋184とを同時に緩めると、或いは三関節筋181と三関節筋183とを同時に緩め三関節筋182と三関節筋184とを同時に引っ張るとユニバーサルジョイント82を左右方向の回転軸まわりに回転させることによってハンド9に上下振り動作をさせる。また、三関節筋181と三関節筋184とを同時に引っ張り三関節筋182と三関節筋183とを同時に緩めると、或いは三関節筋181と三関節筋184とを同時に緩め三関節筋182と三関節筋183とを同時に引っ張ると軸回転ジョイント412を回転させることによってハンド9に回内外動作をさせる。よって、4本の三関節筋を用いて手首部8とハンド9には前腕リンク5に対する3自由度の運動をさせる。
【0018】
前述したように関節の自由度数より1つ多い関節筋を用いて各関節を拮抗駆動できる。また、各駆動ユニットのアクチュエータと関節筋との間に非線形バネ要素を挿入することで、関節の姿勢制御に影響を与えず関節の剛性も独立に調整できる。また、アームの運動性能に対する影響が大きく現れるのはアームが高加減速かつ低速度で変位する時である。一方、安全性に配慮すべきときはアームが高速度変位する時である。よって、剛性の目標指令は高速度変位時小さい値、高加減速かつ低速度変位時大きい値に与えればアームに良好な安全性と優れた制御性能を両立させることができる。
【0019】
本実施例のロボットは、肩関節部2の3自由度と肘関節部4の1自由度と手首部8の3自由度とを合わせて7自由度で運動することができ、人間のアームと近い動作をさせることができる。
【符号の説明】
【0020】
1 本体
2 肩関節部
3 上腕リンク
4 肘関節部
5 前腕リンク
11、12、13、14 一関節筋
15、16、17 二関節筋
181、182、183、184 三関節筋
21 球面ジョイント
22、23、24 靭帯
411 折れ回動ジョイント
412、81 軸回転ジョイント
42 差動機構
421 フレーム
422 差動機構リンク
423、424 プーリ
425、426 サイドギア
427 ピニオンギア
428 支持軸
61、62、63、641、642、643、644、651、652、653、654、661、662、663、664 ガイドピン
711、712、713、721、722、723、724、731、732、733、741、742、743、744 固定ピン
8 手首部
82 ユニバーサルジョイント
9 ハンド
【技術分野】
【0001】
本発明は、ロボットに関する。
【背景技術】
【0002】
最近、サービスロボットおよび人協調産業ロボットの研究は盛んに行われている。これらのロボットは人間と直接に接するため、安全性の保証は重要になっている。ロボットシステムの安全性を保つため、ロボットの各関節は柔軟かつ軽量であることが要求される。そこで、従来技術は、駆動伝達経路に非線形バネ要素を挿入してワイヤ拮抗駆動を用いることにより、装置の柔軟化および軽量化を図っている(例えば、非特許文献1参照)。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】日本ロボット学会誌、Vol.14 No.8、p.1152−1159
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来は、ロボットがシリアルで構成され、1自由度を実現するため1つのリンクと1つの回転軸を設けたので、多自由度を実現するためリンクと回転軸のみだけではなくプーリとアイドルプーリも多く設ける必要があり、構造が複雑となる。また、より先端のリンクを駆動するワイヤはより最基端部に近いすべてのリンクに設置されたプーリとアイドルプーリを通す必要があるため、摩擦によるエネルギー損失とワイヤの磨耗が大きいという問題があった。
本発明はこのような問題点に鑑みてなされたものであり、多自由度関節とパラレル駆動ユニットを用いて関節数とリンク数を減らし、そして動力源であるモータなどのアクチュエータを本体に固定して関節筋(ワイヤなどの柔軟に力を伝達するものを称す)を通してアームを駆動することでアームを軽量化することができる。また、各駆動ユニットに非線形バネ要素を挿入し、関節の自由度数より1つ以上多い駆動ユニットを用いて拮抗に関節とリンクを駆動制御することによって、アームの姿勢と剛性を目標指令に独立かつ正確に追従させ、良好な安全性と優れた制御性能を共に達成することができるロボットを提供することを目的とする。
【課題を解決するための手段】
【0005】
上記問題を解決するため、本発明は、次のように構成したのである。
請求項1に記載の発明は、本体と、3自由度変位できる肩関節部と、上腕リンクと、2自由度変位できる肘関節部と、前腕リンクと、を備え、すべてのアクチュエータが前記本体に設置され、前記アクチュエータが4本以上の一関節筋を介して前記肩関節部と前記上腕リンクとを駆動し、3本以上の二関節筋を介して前記肘関節部と前記前腕リンクとを駆動するものである。
また、請求項2に記載の発明は、本体と、3自由度変位できる肩関節部と、上腕リンクと、1自由度変位できる肘関節部と、前腕リンクと、3自由度変位できる手首部と、ハンドとを備え、アクチュエータが前記本体に設置され、前記アクチュエータが4本以上の一関節筋を介して前記肩関節部と前記上腕リンクとを駆動し、少なくとも2本の二関節筋を介して前記肘関節部と前記前腕リンクとを駆動し、少なくとも4本の三関節筋を介して前記手首部と前記ハンドとを駆動するものである。
また、請求項3に記載の発明は、前記肩関節部は、受部材が前記本体に固定され球体部が前記上腕リンクに連結された球面ジョイントと、前記球面ジョイントの球体部を包むように一端が本体に固定され残りの一端が前記上腕リンクに固定された3本以上の靭帯とで、構成されるものである。
また、請求項4に記載の発明は、前記球面ジョイントは、受部材の両側面が受部材の球面の中心を挟まないものである。
また、請求項5に記載の発明は、前記靭帯は、編みチューブ中に伸縮可能な弾性体を挿入して構成されるものである。
また、請求項6に記載の発明は、前記肘関節部は、回転軸が互いに垂直する軸継手である折れ回動ジョイントと軸回転ジョイントとで構成されるものである。
また、請求項7に記載の発明は、前記肘関節部は、差動機構で構成され、2本の前記二関節筋を各々2つのサイドギアに連結された2つのプーリに巻くものである。
また、請求項8に記載の発明は、前記手首部は、軸回転ジョイントとユニバーサルジョイントとで構成されるものである。
【発明の効果】
【0006】
多自由度関節とパラレル駆動ユニットを用いて関節数とリンク数を減らし、そして動力源であるモータなどのアクチュエータを本体に固定して関節筋(ワイヤなど)を通してアームを駆動することでアームを軽量化することができる。また、各駆動ユニットに非線形バネ要素を挿入し、関節の自由度数より1つ以上多い駆動ユニットを用いて拮抗に関節とリンクを駆動制御することによって、関節の姿勢角度と剛性を目標指令に独立かつ正確に追従させ、良好な安全性と優れた制御性能を共に達成することができる。
【図面の簡単な説明】
【0007】
【図1】本発明の第1実施例を示すロボットの構成図
【図2】本発明の第2実施例を示すロボットの構成図
【図3】本発明の第3実施例を示すロボットの構成図
【発明を実施するための形態】
【0008】
以下、本発明の実施の形態について図を参照して説明する。
【実施例1】
【0009】
図1は、本発明の第1実施例を示すロボットの構成図である。図1aは正面図であり、図1bは平面図である。図において、本体1は、アームを駆動するモータなどの不図示のアクチュエータが設置されている。肩関節部2は、受部材が本体1に固定されている3自由度球面ジョイント21と球面ジョイント21の球体部を拘束する3本の靭帯22、23、24とで構成されている。肘関節部4は、回転軸が互いに垂直する軸継手である折れ回動ジョイント411と軸回転ジョイント412とで構成されて2自由度で動く。3は上腕リンク、5は前腕リンクである。11、12、13および14は一関節筋(以下、1つ関節を跨る関節筋を一関節筋、2つ関節を跨る関節筋を二関節筋、3つ関節を跨る関節筋を三関節筋と称す)、15、16および17は二関節筋である。ガイドピン61、62および63は、それぞれ二関節筋15、二関節筋16および二関節筋17が上腕リンク3から離れないにこの3つの二関節筋を拘束する。また、固定ピン711、712、713、721、722、723、724、731、732および733は、靭帯、一関節筋および二関節筋の先端を上腕リンク3或いは上腕リンク5に固定する。
【0010】
以下、ロボットの動作原理について説明する。
ロボットは本体1と、3自由度の肩関節部2と、2自由度の肘関節部4と、肩関節部2と肘関節部4とを連結する上腕リンク3と、肘関節部4と不図示の手首部とを連結する前腕リンク5と、上腕リンク3を引っ張る4つの一関節筋11、12、13、14と、前腕リンク5を引っ張る3つの二関節筋15、16、17とで構成されてある。動く部であるアームを軽量化するため、すべての動力源であるモータなどのアクチュエータが動かない部である本体1に設置され、関節筋(ワイヤなど)を介してアームを駆動する。
肩関節部2は、受部材が本体1に固定されている3自由度球面ジョイント21と球面ジョイント21の球体部を拘束する3本の靭帯22、24、25とで構成されている。普通の球面ジョイントはしっかり球体部を拘束するため受部材の両側面が球面中心を挟むように構成されるので、可動範囲が狭い。ここで、肩関節の可動範囲を拡張するために、受部材がカバーする面積を小さく(受部材の両側面が球面中心を挟まない)する。そのまますると、球面ジョイントの球体部が受部材の窪みから外れて戻れなくなり、すなわち脱臼しやすくなる。それで、少なくとも3本の靭帯22、23、24を球面ジョイント21の球体部を囲むように均等に設置する。靭帯は一端が本体に、残りの一端が上腕リンク3に固定ピンで固定され、そして一定な範囲内で伸縮できるように構成される。例えば、編みチューブ中に伸縮可能な弾性体を挿入する。このようにして、靭帯は関節筋の駆動にあまり妨げることがなく、負荷がない時弾力でアームの自重を負担し、球面ジョイントの球体部が受部材の窪みに常に接触するように働き、負荷が重い時も限界長度で球面ジョイントの球体部が完全に受部材の窪みから外れることを止めすなわち肩関節が脱臼しないように働く。
上腕リンク3は一端が球面ジョイント21の球体部に固定され、残りの一端が肘関節部に繋ぐ。4本の一関節筋11、12、13および14は各々一端が本体に配置された別々のアクチュエータに繋ぎ、残りの一端が止めピンによって上腕リンク3に固定されてある。また、一関節筋11と一関節筋12とおよび一関節筋13と一関節筋14とはそれぞれクロースになって互いに上腕リンク3と球面ジョイント21の球体部との両側に対称に配置されてある。また、1つのアクチュエータと1つの関節筋は1つの駆動ユニットになって、関節筋の張力を測るセンサーを付ければこの張力をフィードバック制御できる。この4本の一関節筋の張力を制御することによって、球面ジョイント21の受部材の窪みの球面中心点を中心にしたxyzの3軸まわりの回転トルクを発生し、上腕リンク3と球面ジョイント21の球体部を3自由度球面運動させる。
肘関節部4は、回転軸が互いに垂直する軸継手である折れ回動ジョイント411と軸回転ジョイント412とで構成されて上腕リンク3と前腕リンク5を連結する。ここで、折れ回動ジョイント411と軸回転ジョイント412とは設置位置が交換されてもよい。また、折れ回動ジョイント411の回転軸が上腕リンク3と垂直となり、軸回転ジョイント412の回転軸が前腕リンク5と平行になる。また、3つの二関節筋15、16および17は各々一端が本体に配置された別々のアクチュエータに繋ぎ、残りの一端が止めピンによって前腕リンク5に固定され、また中段がそれぞれ上腕リンク3に設置されたガイドピン61、62、63によって垂直方向に動かないように拘束されてある。また、アクチュエータとガイドピンとの間に各二関節筋がほぼ平行になり、ガイドピンと止めピンとの間に二関節筋15、16は交差するようになっている。
二関節筋15と二関節筋16とを同時に引っ張り二関節筋17を緩めると、或いは二関節筋15と二関節筋16を同時に緩め二関節筋17を引っ張ると折れ回動ジョイント411を回転させることによって肘に屈伸動作をさせる。また、二関節筋15と二関節筋16との一本を引っ張り残りの一本を緩めると軸回転ジョイント412および前腕リンク5に回転を与えてアームにツイスト動作をさせる。よって、3本の二関節筋を用いて肘関節部4と前腕リンク5に2自由度の運動をさせる。
【0011】
前述したように関節の自由度数より1つ多い関節筋を用いて各関節を拮抗駆動できる。また、各駆動ユニットのアクチュエータと関節筋との間に非線形バネ要素を挿入することで、関節の姿勢制御に影響を与えず関節の剛性も独立に調整できる。ここで、非線形バネとは、バネ定数が一定な値ではなく変位によって変わるものである。例えば、円錐コイルバネは伸縮量が大きくなるほどバネ定数が大きくなる。また、アームの運動性能に対する影響が大きく現れるのはアームが高加減速かつ低速度で変位する時である。一方、安全性に配慮すべきときはアームが高速度変位する時である。よって、剛性の目標指令は高速度変位時小さい値、高加減速かつ低速度変位時大きい値に与えればアームに良好な安全性と優れた制御性能を両立させることができる。
【実施例2】
【0012】
図2は本発明の第2実施例を示すロボットの構成図である。図2aは正面図であり、図2bは平面図である。図において、肘関節部4は差動機構42で構成され、フレーム421と、差動機構リンク422と、2つのプーリ423、424と、2つのサイドギア425、426と、ピニオンギア427とを含んである。また、図1と同一ものは同じ記号を付しその説明を省略する。
図2に示された本実施例のロボットは、肘関節部4が折れ回動ジョイント411および軸回転ジョイント412の代わりに差動機構42で構成されている。また、第1実施例のロボットにて二関節筋15と二関節筋16はそれぞれガイドピン61とガイドピン62を通した後クロスになって先端が前腕リンク5に固定され、本実施例のロボットにて二関節筋15と二関節筋16はそれぞれガイドピン61とガイドピン62を通した後そのまま並行になり各々の先端が差動機構42のプーリ423とプーリ424に固定されている。
【0013】
以下、動作原理について説明する。
肩関節部2と上腕リンク3の構成および動作原理は第1実施例と同じであるため、ここでその説明を省略する。
肘関節部4は差動機構42のフレーム421を持って上腕リンク3と連結し、また差動機構42のピニオンギア427を持って前腕リンク5と連結する。一方、支持軸428はフレーム421に固定されてある。また、プーリ423とプーリ424はそれぞれサイドギア425とサイドギア426と連結されてベアリングを介して支持軸428に設置されてある。そして、差動機構リンク422はベアリングを介してピニオンギア427と前腕リンク5との連結部および支持軸428と結合する。また、二関節筋15と二関節筋16はそれぞれ上腕リンク3に設置されたガイドピン61とガイドピン62を通した後プーリ423とプーリ424に固定される。一方、二関節筋17は上腕リンク3或いはフレーム421に設置されたガイドピン63を通した後前腕リンク5に固定される。
二関節筋15と二関節筋16を同時に引っ張り、二関節筋17が緩められると、プーリ423とプーリ424にはトルクが発生し、このトルクがサイドギア425とサイドギア426およびピニオンギア427を通して前腕リンク5に伝われて肘に曲げる動作をさせる。一方、二関節筋15、16を同時に緩め二関節筋17を引っ張ると二関節筋17の張力が直ちに前腕リンク5に伝われて肘に伸ばし動作をさせる。また、二関節筋15と二関節筋16との一本を引っ張り残りの一本を緩めると、サイドギア425とサイドギア426にトルクの差が発生し、その差がピニオンギア427および前腕リンク5に回転を与えてアームにツイスト動作をさせる。よって、3本の二関節筋を用いて肘関節部4と前腕リンク5に2自由度運動させる。
【0014】
前述したように関節の自由度数より1つ多い関節筋を用いて各関節を拮抗駆動できる。また、各駆動ユニットのアクチュエータと関節筋との間に非線形バネ要素を挿入することで、関節の姿勢制御に影響を与えず関節の剛性も独立に調整できる。また、アームの運動性能に対する影響が大きく現れるのはアームが高加減速かつ低速度で変位する時である。一方、安全性に配慮すべきときはアームが高速度変位する時である。よって、剛性の目標指令は高速度変位時小さい値、高加減速かつ低速度変位時大きい値に与えればアームに良好な安全性と優れた制御性能を両立させることができる。
【0015】
本実施例のロボットのツイスト動作範囲はプーリ423とプーリ424に巻き込まれる関節筋の量のみに限定されてプーリの大きさを十分大きくしてあれば広く取られる。
【実施例3】
【0016】
図3は本発明の第3実施例を示すロボットの構成図である。図3aは正面図であり、図3bは平面図である。図において、ロボットは肩関節部2と、上腕リンク3と、肘関節部4と、前腕リンク5との以外に前腕リンク5とハンド9とを連結する手首部8も含んである。手首部8は軸回転ジョイント81とユニバーサルジョイント82とで構成されて3自由度で動く。一方、肘関節部4は折れ回動ジョイント411のみで構成されて1自由度で動く。181、182、183および184は三関節筋である。ガイドピン641、642、643、644、651、652、653、654、661、662、663および664は、三関節筋181、182、183および184が上腕リンク3および前腕リンク5から離れないようにこの4つの三関節筋を拘束する。また、固定ピン741、742、743および744は、三関節筋の先端をハンド9に固定する。また、図1と同一ものは同じ記号を付しその説明を省略する。
【0017】
以下、動作原理について説明する。
ロボットは本体1と、3自由度の肩関節部2と、1自由度の肘関節部4と、3自由度の手首部8と、肩関節部2と肘関節部4とを連結する上腕リンク3と、肘関節部4と手首部8とを連結する前腕リンク5と、上腕リンク3を引っ張る4つの一関節筋11、12、13、14と、前腕リンク5を引っ張る2つの二関節筋15、17と、ハンド9を引っ張る4つの三関節筋181、182、183、184とで構成されてある。動く部であるアームを軽量化するため、すべての動力源であるモータなどのアクチュエータが動かない部である本体1に設置され、関節筋(ワイヤなど)を介してアームを駆動する。
肩関節部2と上腕リンク3の構成および動作原理は第1実施例と同じであるため、ここでその説明を省略する。
肘関節部4は、回転軸が上腕リンク3および前腕リンク5に垂直する軸継手である折れ回動ジョイント411で構成されて上腕リンク3と前腕リンク5を連結する。2つの二関節筋15と17は各々一端が本体に配置された別々のアクチュエータに繋ぎ、残りの一端が止めピンによって前腕リンク5に固定され、また中段がそれぞれ上腕リンク3に設置されたガイドピン61と63によって垂直方向に動かないように拘束され、そして回動ジョイント411の回転軸に垂直する平面において上下1本ずつ設置されている。
二関節筋15を引っ張り二関節筋17を緩めると、或いは二関節筋15を緩め二関節筋17を引っ張ると折れ回動ジョイント411を回転させることによって肘に屈伸動作をさせる。よって、2本の二関節筋を用いて肘関節部4と前腕リンク5には上腕リンク3に対する1自由度の運動をさせる。
手首部8は、回転軸が前腕リンク5と平行になる軸回転ジョイント81を持って前腕リンク5と連結し、またユニバーサルジョイント82を持ってハンド9と連結する。4つの三関節筋181、182、183、184は、各々一端が本体に配置された別々のアクチュエータに繋ぎ、残りの一端が止めピンによってハンド9に固定され、また中段が上腕リンク3に設置されたガイドピン641、642、643、644と、前腕リンク5に設置されたガイドピン651、652、653、654、661、662、663、664とによって垂直方向に動かないように拘束されてある。また、アクチュエータとガイドピンとの間および隣接するガイドピンの間に各三関節筋がほぼ平行になり、一方ガイドピン661、662と止めピン741、742との間に三関節筋181、182は交差し、ガイドピン663、663と止めピン743、744との間に三関節筋183、184は交差するようになっている。
三関節筋181と三関節筋182とを同時に引っ張り三関節筋183と三関節筋184とを同時に緩めると、或いは三関節筋181と三関節筋182とを同時に緩め三関節筋183と三関節筋184とを同時に引っ張るとユニバーサルジョイント82を上下方向の回転軸まわりに回転させることによってハンド9に左右振り動作をさせる。一方、三関節筋181と三関節筋183とを同時に引っ張り三関節筋182と三関節筋184とを同時に緩めると、或いは三関節筋181と三関節筋183とを同時に緩め三関節筋182と三関節筋184とを同時に引っ張るとユニバーサルジョイント82を左右方向の回転軸まわりに回転させることによってハンド9に上下振り動作をさせる。また、三関節筋181と三関節筋184とを同時に引っ張り三関節筋182と三関節筋183とを同時に緩めると、或いは三関節筋181と三関節筋184とを同時に緩め三関節筋182と三関節筋183とを同時に引っ張ると軸回転ジョイント412を回転させることによってハンド9に回内外動作をさせる。よって、4本の三関節筋を用いて手首部8とハンド9には前腕リンク5に対する3自由度の運動をさせる。
【0018】
前述したように関節の自由度数より1つ多い関節筋を用いて各関節を拮抗駆動できる。また、各駆動ユニットのアクチュエータと関節筋との間に非線形バネ要素を挿入することで、関節の姿勢制御に影響を与えず関節の剛性も独立に調整できる。また、アームの運動性能に対する影響が大きく現れるのはアームが高加減速かつ低速度で変位する時である。一方、安全性に配慮すべきときはアームが高速度変位する時である。よって、剛性の目標指令は高速度変位時小さい値、高加減速かつ低速度変位時大きい値に与えればアームに良好な安全性と優れた制御性能を両立させることができる。
【0019】
本実施例のロボットは、肩関節部2の3自由度と肘関節部4の1自由度と手首部8の3自由度とを合わせて7自由度で運動することができ、人間のアームと近い動作をさせることができる。
【符号の説明】
【0020】
1 本体
2 肩関節部
3 上腕リンク
4 肘関節部
5 前腕リンク
11、12、13、14 一関節筋
15、16、17 二関節筋
181、182、183、184 三関節筋
21 球面ジョイント
22、23、24 靭帯
411 折れ回動ジョイント
412、81 軸回転ジョイント
42 差動機構
421 フレーム
422 差動機構リンク
423、424 プーリ
425、426 サイドギア
427 ピニオンギア
428 支持軸
61、62、63、641、642、643、644、651、652、653、654、661、662、663、664 ガイドピン
711、712、713、721、722、723、724、731、732、733、741、742、743、744 固定ピン
8 手首部
82 ユニバーサルジョイント
9 ハンド
【特許請求の範囲】
【請求項1】
本体と、3自由度変位できる肩関節部と、上腕リンクと、2自由度変位できる肘関節部と、前腕リンクと、を備え、アクチュエータが前記本体に設置され、前記アクチュエータが4本以上の一関節筋を介して前記肩関節部と前記上腕リンクとを駆動し、少なくとも3本の二関節筋を介して前記肘関節部と前記前腕リンクとを駆動することを特徴とするロボット。
【請求項2】
本体と、3自由度変位できる肩関節部と、上腕リンクと、1自由度変位できる肘関節部と、前腕リンクと、3自由度変位できる手首部と、ハンドとを備え、アクチュエータが前記本体に設置され、前記アクチュエータが4本以上の一関節筋を介して前記肩関節部と前記上腕リンクとを駆動し、少なくとも2本の二関節筋を介して前記肘関節部と前記前腕リンクとを駆動し、少なくとも4本の三関節筋を介して前記手首部と前記ハンドとを駆動することを特徴とするロボット。
【請求項3】
前記肩関節部は、受部材が前記本体に固定され球体部が前記上腕リンクに連結された球面ジョイントと、前記球面ジョイントの球体部を包むように一端が本体に固定され残りの一端が前記上腕リンクに固定された3本以上の靭帯と、で構成されることを特徴とする請求項1または請求項2記載のロボット。
【請求項4】
前記球面ジョイントは、受部材の両側面が受部材の球面の中心を挟まないことを特徴とする請求項3記載のロボット。
【請求項5】
前記靭帯は、
編みチューブ中に伸縮可能な弾性体を挿入して構成されることを特徴とする請求項3記載のロボット。
【請求項6】
前記肘関節部は、回転軸が互いに垂直する軸継手である折れ回動ジョイントと軸回転ジョイントとで構成されることを特徴とする請求項1記載のロボット。
【請求項7】
前記肘関節部は、差動機構で構成され、2本の前記二関節筋を各々2つのサイドギアに連結された2つのプーリに巻くことを特徴とする請求項1記載のロボット。
【請求項8】
前記手首部は、軸回転ジョイントとユニバーサルジョイントとで構成されることを特徴とする請求項2記載のロボット。
【請求項1】
本体と、3自由度変位できる肩関節部と、上腕リンクと、2自由度変位できる肘関節部と、前腕リンクと、を備え、アクチュエータが前記本体に設置され、前記アクチュエータが4本以上の一関節筋を介して前記肩関節部と前記上腕リンクとを駆動し、少なくとも3本の二関節筋を介して前記肘関節部と前記前腕リンクとを駆動することを特徴とするロボット。
【請求項2】
本体と、3自由度変位できる肩関節部と、上腕リンクと、1自由度変位できる肘関節部と、前腕リンクと、3自由度変位できる手首部と、ハンドとを備え、アクチュエータが前記本体に設置され、前記アクチュエータが4本以上の一関節筋を介して前記肩関節部と前記上腕リンクとを駆動し、少なくとも2本の二関節筋を介して前記肘関節部と前記前腕リンクとを駆動し、少なくとも4本の三関節筋を介して前記手首部と前記ハンドとを駆動することを特徴とするロボット。
【請求項3】
前記肩関節部は、受部材が前記本体に固定され球体部が前記上腕リンクに連結された球面ジョイントと、前記球面ジョイントの球体部を包むように一端が本体に固定され残りの一端が前記上腕リンクに固定された3本以上の靭帯と、で構成されることを特徴とする請求項1または請求項2記載のロボット。
【請求項4】
前記球面ジョイントは、受部材の両側面が受部材の球面の中心を挟まないことを特徴とする請求項3記載のロボット。
【請求項5】
前記靭帯は、
編みチューブ中に伸縮可能な弾性体を挿入して構成されることを特徴とする請求項3記載のロボット。
【請求項6】
前記肘関節部は、回転軸が互いに垂直する軸継手である折れ回動ジョイントと軸回転ジョイントとで構成されることを特徴とする請求項1記載のロボット。
【請求項7】
前記肘関節部は、差動機構で構成され、2本の前記二関節筋を各々2つのサイドギアに連結された2つのプーリに巻くことを特徴とする請求項1記載のロボット。
【請求項8】
前記手首部は、軸回転ジョイントとユニバーサルジョイントとで構成されることを特徴とする請求項2記載のロボット。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2011−121163(P2011−121163A)
【公開日】平成23年6月23日(2011.6.23)
【国際特許分類】
【出願番号】特願2010−64287(P2010−64287)
【出願日】平成22年3月19日(2010.3.19)
【出願人】(000006622)株式会社安川電機 (2,482)
【Fターム(参考)】
【公開日】平成23年6月23日(2011.6.23)
【国際特許分類】
【出願日】平成22年3月19日(2010.3.19)
【出願人】(000006622)株式会社安川電機 (2,482)
【Fターム(参考)】
[ Back to top ]