
ロボット
【課題】簡素な構成にすることができ、しかも省エネ型に構成することができるロボットを提供する。
【解決手段】少なくとも複数本の可動脚2を備えたロボットであって、可動脚2は、胴体部に回転自在に備えた股関節部5と、股関節部5から一対の大腿部平行リンク7A,7Bを介して連結される膝関節部6と、膝関節部6から一対の下腿部平行リンク9A,9Bを介して連結される足関節部8と、大腿部平行リンク7A,7Bのうちの一方の大腿部リンク7Aの膝関節側端部に固定されたギヤ12と、ギヤ12と噛合うようにギヤ12を備える大腿部リンク7Aと同一側の下腿部リンク9Aの膝関節側端部に固定された連動ギヤ13と、股関節部5を回動させるためのアクチュエータ16とを備えさせた。
【解決手段】少なくとも複数本の可動脚2を備えたロボットであって、可動脚2は、胴体部に回転自在に備えた股関節部5と、股関節部5から一対の大腿部平行リンク7A,7Bを介して連結される膝関節部6と、膝関節部6から一対の下腿部平行リンク9A,9Bを介して連結される足関節部8と、大腿部平行リンク7A,7Bのうちの一方の大腿部リンク7Aの膝関節側端部に固定されたギヤ12と、ギヤ12と噛合うようにギヤ12を備える大腿部リンク7Aと同一側の下腿部リンク9Aの膝関節側端部に固定された連動ギヤ13と、股関節部5を回動させるためのアクチュエータ16とを備えさせた。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、少なくとも複数本の可動脚を備えたロボットに関する。
【背景技術】
【0002】
近年、さまざまなロボットの開発が行われているが、高齢者や障害者にとって最適な生活支援用のロボット(介助用ロボット)の開発が望まれているが、成体としてのロボット開発は、未だ多くないのが現状である。
その中でも、例えば、多関節からなる可動脚を、関節毎に備えたアクチュエータにより歩行動作を行わせるものが提案されている。
【0003】
具体的には、腰部フレームに取り付けられた股関節アクチュエータと、股関節アクチュエータから大腿部フレームを介して連結される膝関節アクチュエータと、膝関節アクチュエータから頸部フレームを介して連結される足関節アクチュエータとを備えて、それら3個のアクチュエータの駆動を操作することによって、可動脚を屈伸及び伸展させることで歩行を行わせることができるようにしている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2001−287177号公報(図2参照)
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記特許文献1の構成によれば、すべての関節にアクチュエータを備えさせていることから、可動脚の構成が複雑になるだけでなく、脚毎に3個のアクチュエータを駆動するためのエネルギーコストも多くかかる不都合が発生していた。特に介助用ロボットとしては、長時間に渡って使用することができる省エネ型のロボットを開発することが最大の課題になっている。
【0006】
本発明が前述の状況に鑑み、解決しようとするところは、簡素な構成にすることができ、しかも省エネ型に構成することができるロボットを提供することを課題とする。
【課題を解決するための手段】
【0007】
本発明のロボットは、前述の課題解決のために、少なくとも複数本の可動脚を備えたロボットであって、前記可動脚は、胴体部に回転自在に備えた股関節部と、該股関節部から一対の大腿部平行リンクを介して連結される膝関節部と、該膝関節部から一対の下腿部平行リンクを介して連結される足関節部と、前記大腿部平行リンクのうちの一方の大腿部リンクの膝関節側端部に固定されたギヤと、該ギヤと噛合うように該ギヤを備える大腿部リンクと同一側の下腿部リンクの膝関節側端部に固定された連動ギヤと、前記股関節部を回動させるためのアクチュエータとを備えさせたことを特徴としている。
【0008】
上記構成によれば、アクチュエータを駆動することによって、股関節部が回転し、その回転に伴って、ギヤを介して連動されている大腿部平行リンク及び下腿部平行リンクが屈曲動作を行う。また、屈伸動作後、アクチュエータを前記とは反対方向に駆動することによって、ギヤを介して連動している大腿部平行リンク及び下腿部平行リンクが伸展動作を行う。そして、二足歩行用のロボットであれば、例えば左右の可動脚を交互に前記屈曲動作と伸展動作を行うことによって、歩行することができ、四足歩行ロボットであれば、一脚ずつ又は対向する二脚ずつを前記屈曲動作と伸展動作を行うことによって、歩行することができる。前記屈曲動作では、屈曲動作開始後において動き出した大腿部平行リンク及び下腿部平行リンクなどの重力による慣性力を利用することができるから、その分屈曲させるためのアクチュエータの動力を低減することができる。また、伸展動作では、大腿部平行リンク及び下腿部平行リンクなどの自重により伸びようとする戻り力を利用することができるから、その分伸展させるためのアクチュエータの動力を低減することができる。
【0009】
また、本発明のロボットは、前記足関節部から足部を構成する足部用リンクと、該足部用リンクの遊端部に固定された接地足と、該足部用リンクの足関節部側端部に固定されたギヤと、このギヤに噛み合うように前記下腿部平行リンクの他方の下腿部リンクの足関節部側端部に固定されたギヤとを備えていてもよい。
【0010】
また、本発明のロボットは、前記下腿部平行リンクの他方の下腿部リンクの股関節部側端部に固定されたギヤと、該ギヤに噛み合うように前記股関節部に固定され、歩行時において前記可動脚が屈伸動作から伸展動作に移行する際に該可動脚が伸展することを妨げるためのブレーキ手段を備えていてもよい。
【0011】
上記構成にしておけば、歩行時において前記可動脚が屈伸動作から伸展動作に移行する際に可動脚が必要以上に伸展動作してしまい、可動脚の接地足の下端が地面に接地するといったことがない。従って、躓くことがない良好な歩行を行わせることができる。この場合、ブレーキ手段としては、電磁ブレーキの他、電動モータや回転ダンパーなどを用いることができる。電動モータを用いる場合には、可動脚が屈伸動作から伸展動作に移行するときのみ駆動するようにすれば、電動モータの駆動による電力を低減することができる。また、回転ダンパーを用いる場合には、可動脚が屈伸動作から伸展動作に移行する際にのみ作用するように、一方向クラッチを併用することが好ましい。
【発明の効果】
【0012】
大腿部平行リンクと下腿部平行リンクとをギヤを用いて連動しておけば、股関節部を回動させるためのアクチュエータを備えさせるだけの簡素な構成で、可動脚を屈曲動作と伸展動作とを行わせることができるから、アクチュエータの数を減らすことができるだけでなく、可動脚の自重を利用してアクチュエータの動力を低減することができる。従って、特に介助用ロボットに望まれる省エネ型のロボットを提供することができる。
【図面の簡単な説明】
【0013】
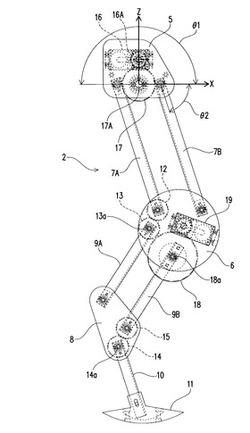
【図1】胴体部を省略した歩行ロボットの可動脚の側面図である。
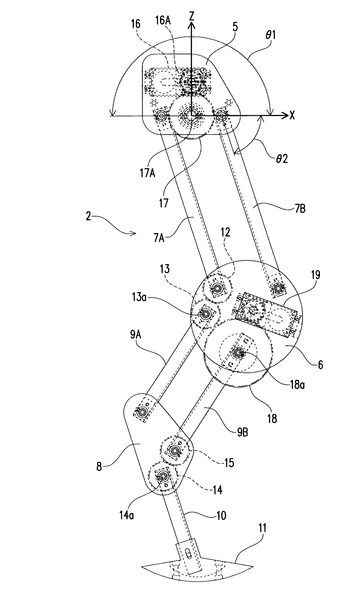
【図2】図1で示した可動脚の正面図である。
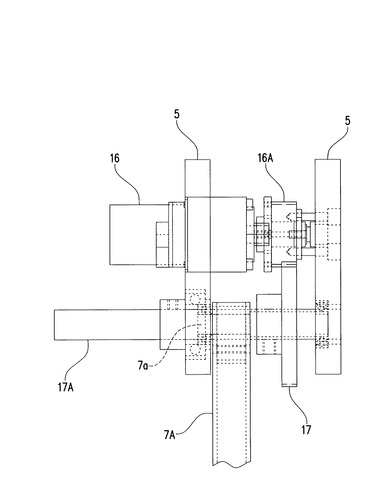
【図3】図1で示した可動脚の股関節部の拡大側面図である。
【図4】図1で示した可動脚の股関節部の拡大正面図である。
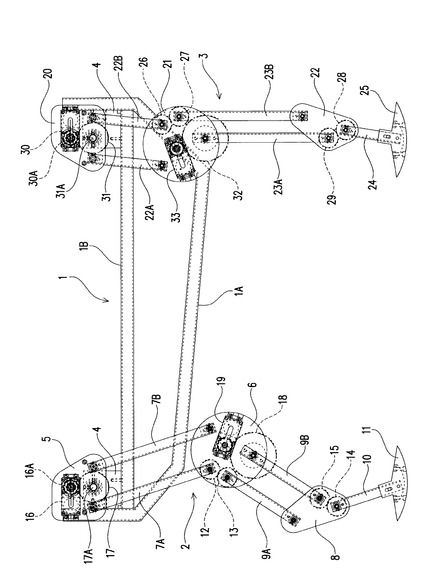
【図5】四足歩行ロボットの側面図である。
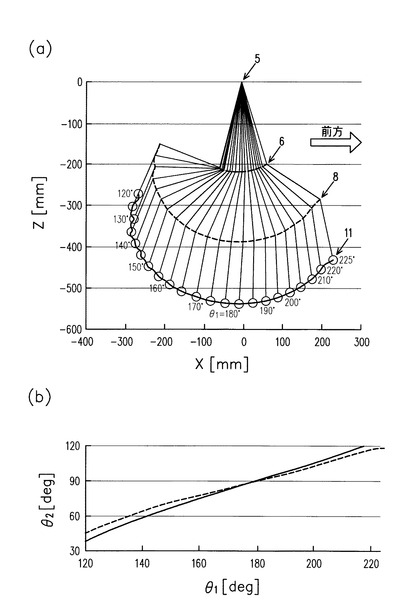
【図6】(a)は、可動脚の初期姿勢をθ1=180[deg.]とし、前方へ45°、後方へ60°、ゆっくりと股関節部を回転させて可動脚を振り、静止させたときに自重により釣り合ったときの各関節中心をプロットし、そのプロットした点を結んで構成したグラフであり、(b)は、静的な釣り合いから理論上で求めた膝関節部の屈曲角と図6(a)で示した実験結果とを示したグラフである。
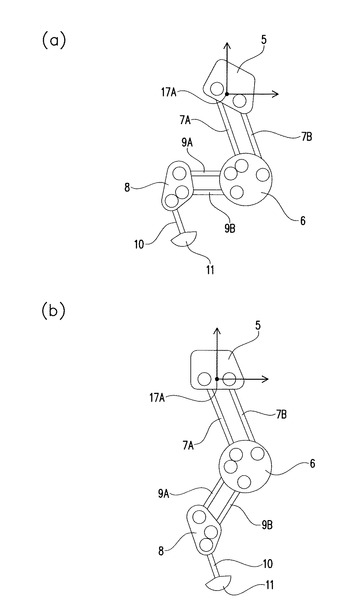
【図7】(a)は、股関節のみを回転させることにより可動脚の膝関節を屈伸させた状態を示す可動脚の概略図、(b)は、股関節のみを回転させることにより可動脚の膝関節を伸展させた状態を示す可動脚の概略図である。
【発明を実施するための形態】
【0014】
図1〜図4には、介助用ロボットに用いられる最適な省エネ型の本発明の可動脚2を示している。この可動脚2は、二足歩行ロボットや四足歩行ロボットに用いられるが、二足以上であれば、どのような足数のロボットにも用いることができる。尚、図1において右側を前側とし、左側を後側として説明する。
【0015】
前記可動脚2は、図1及び図2に示すように、ほぼ台形状で板状の左右一対の股関節部5,5と、股関節部5,5よりも下方に位置する円形で板状の左右一対の膝関節部6,6と、股関節部5,5と膝関節部6,6とを連結するための一対の大腿部平行リンク7A,7Bと、膝関節部6,6よりも下方に位置するほぼ三角形状で板状の左右一対の足関節部8,8と、膝関節部6,6と足関節部8,8とを連結するための一対の下腿部平行リンク9A,9Bと、足関節部8,8から下方に延出され、足部を構成する足部用リンク10と、該足部用リンク10の遊端部(下端部)に固定された下面が円弧状に形成された接地足11とを備えている。前記大腿部平行リンク7A,7B、下腿部平行リンク9A,9B、足部用リンク10は、軽量化を図るために一側が開放された断面形状がコの字状に形成されているが、板状あるいはパイプ状であってもよい。
【0016】
また、前記大腿部平行リンク7A,7Bのうちの一方(前側)の大腿部リンク7Aの膝関節側端部に、ギヤ12が固定され、該ギヤ12と噛合うようにギヤ12を備える大腿部リンク7Aと同一側(前側)の下腿部リンク9Aの膝関節側端部に固定された連動ギヤ13と、足部用リンク10の足関節部側端部に固定されたギヤ14と、このギヤ14に噛み合うように前記下腿部平行リンクの他方の下腿部リンク9Bの足関節部側端部に固定されたギヤ15とを備えるとともに、前記股関節部5を回動させるためのアクチュエータとしての電動モータ(サーボモータ)16を該股関節部5に備えさせている。
【0017】
従って、電動モータ16を所定角度正転方向に駆動した後、逆転方向に駆動することによって、可動脚2を前後に振ることで歩行することができるようになっている。つまり、電動モータ16の駆動で大腿部リンク7A,7Bが、図3に示すように股関節部5に取り付けられている支軸7a,7b回りで揺動操作されることによって、ギヤ連動された下腿部リンク9A,9Bが膝関節部6,6に対して大腿部平行リンク7A,7Bとは反対側にギヤ13,18(ギヤ18は後述する)の支軸13a,18a回りで揺動操作されるとともに、足部用リンク10が足関節部8,8に対して下腿部リンク9A,9Bとは反対側にギヤ14の支軸14a回りで揺動操作され、可動脚2が、図7(a)の屈曲動作と図7(b)の伸展動作とを行うように構成している。
【0018】
前記股関節部5,5間には、電動モータ16の出力ギヤ16Aと噛合うギヤ17(出力ギヤ16Aよりも大径にしている)を備えており、このギヤ17の支軸17Aが内側の股関節部5を貫通して図示していない胴体部(又は胴体部を載置する支持フレームなど)に貫通支持されている。従って、電動モータ16を駆動することによって、軸に固定されたギヤ17の周囲を股関節部5が回転することができるように構成している。
【0019】
また、前記下腿部リンク9Bの膝関節部側端部には、前記ギヤ17よりも大径なギヤ18が固定されており、このギヤ18に噛合う屈伸動作補助用の電動モータ(サーボモータ)19を膝関節部6,6に備えている。この電動モータ19は、前記電動モータ16と同一であり、膝関節部6,6の屈曲動作と伸展動作とを行うようにしている。このように電動モータ19により、膝関節部6,6の屈曲させる場合には、リンク同士がギヤ連動されていることから、動き出した大腿部平行リンク7A,7B及び下腿部平行リンク9A,9Bなどの慣性力を利用することができる。その結果、屈曲させるための電動モータ19の動力を低減することができる。また、伸展動作では、大腿部平行リンク7A,7B及び下腿部平行リンク9A,9Bなどの自重により伸びようとする戻り力を利用することができるから、その分伸展させるための電動モータ19の動力を低減することができる。従って、リンク同士をギヤ連動しないで、股関節部5、膝関節部6、足関節部8を3つの電動モータで独立して駆動する構成に比べて、消費電力を飛躍的に低減することができる利点がある。
【0020】
前記電動モータ19を次のように構成すれば、更に消費電力の低減を図ることができる。つまり、歩行時において前記可動脚2が屈伸動作(図7(a)参照)から伸展動作(図7(b)参照)に移行する際に可動脚2が伸展することを妨げるためのブレーキ手段として電動モータ19を用いる場合である。具体的には、可動脚2が伸展するときには、電動モータ19を駆動させることにより下腿部平行リンク9A,9Bが伸びようとすることを遅らせるようにしている。このように構成することによって、歩行時に接地足11が不測に地面に当たって躓くことを回避することができ、良好な歩行を行わせることができるようにしている。従って、屈伸動作時には、電動モータ19を駆動しないようにしているから、その分消費電力の低減を図ることができる。この屈伸動作時に、電動モータ19とギヤ18との連動状態を遮断するためのクラッチを両者間、または電動モータ19側に設けて実施することになる。
【0021】
このように構成された可動脚2は、電動モータ16を所定角度正転方向に駆動した後、逆転方向に駆動することによって、前後に振ることで歩行動作を行うことができるようになっている。尚、屈伸動作補助用の電動モータ19も前記電動モータ16に連動して駆動することになる。つまり、電動モータ16の駆動で股関節部5が回転することによって、大腿部リンク7A,7Bが支軸7a,7b回りで揺動操作される。そして、ギヤ連動された下腿部リンク9A,9Bが膝関節部6,6に対して大腿部平行リンク7A,7Bとは反対側にギヤ13,18(ギヤ18は後述する)の支軸13a,18a回りで揺動操作されるとともに、足部用リンク10が足関節部8,8に対して下腿部リンク9A,9Bとは反対側にギヤ14の支軸14a回りで揺動操作され、可動脚2が、図7(a)の屈曲動作と図7(b)の伸展動作とを交互に行って歩行動作を行うように構成されている。尚、前記下腿部リンク9A,9Bの揺動時には、前記電動モータ19の駆動力が補助することになる。
【0022】
前記2つの電動モータ16,19のうちの屈伸動作補助用の電動モータ19を用いないで1つの電動モータ16のみで可動脚2を屈伸動作と伸展動作とを行う場合について説明する。この場合、可動脚2の重量が変化しないように、電動モータ19を取り外すことなく、電動モータ19とギヤ18との噛合いを解除している。そして、このように構成した可動脚2を電動モータ16のみの駆動で屈曲させたときの実験結果を、図6(a)に示している。具体的には、可動脚2の初期姿勢をθ1=180[deg]とし、前方へ45°、後方へ60°、ゆっくりと股関節部5を電動モータ16により回転させて可動脚2を振り、静止させた状態で可動脚2の自重により釣り合った時の各関節部の中心を結んでグラフにしている。このグラフから、股関節部5の回転で膝関節部6に電動モータ19により回転トルクを印加しなくても、ギヤ連動している膝関節部以下の可動脚2の形状が自ずと変化し、遊脚期間(接地足11が空中に存在している期間)の可動脚2の姿勢に有効であることが判る。
【0023】
また、図6(b)では、静的な釣り合いから理論上求めた膝関節部6の屈曲角と、図6(a)で示した実験結果との比較をグラフにしたものであり、実線が理論値であり、破線が計測値である。図6(b)では、両方の角度とも同じような角度になっており、膝関節部6以下の重量配分を調整することによって膝関節部6の屈曲量を増減させることが可能である。このことから、膝関節部6に設けた電動モータ19の小型化に大きく寄与することは勿論のこと、電動モータ19を省略しても可動脚2の良好な屈曲ができることがわかる。
【0024】
図5に、前記可動脚2を用いた四足歩行ロボットを示している。この四足歩行ロボットは、支持フレーム1の前部に、前記可動脚2と同一の左右一対の前側可動脚2,2(図1が側面図であるため、右側の可動脚しか見えていない)を備え、支持フレーム1の後部に、前記可動脚とは異なる左右一対の後側可動脚3,3(図1が側面図であるため、右側の可動脚しか見えていない)を備えている。
【0025】
前記支持フレーム1は、下向きに突出屈曲されたほぼ逆アーチ型のフレーム本体1Aと、このフレーム本体1Aの前後端を前後方向で連結する一直線状の補強フレーム1Bとを備え、前記補強フレーム1Bの前後の上面のそれぞれには、前記前後の可動脚2,2、3,3の上端を支持するための支持部材4を備えている。
【0026】
前記前側の可動脚2は、前記と同様に、ほぼ台形状で板状の左右一対の股関節部5,5(図1が側面図であるため、右側しか見えていない)と、股関節部5,5よりも下方に位置する円形で板状の左右一対の膝関節部6,6(図1が側面図であるため、右側しか見えていない)と、股関節部5,5と膝関節部6,6とを連結するための一対の大腿部平行リンク7A,7Bと、膝関節部6,6よりも下方に位置するほぼ三角形状で板状の左右一対の足関節部8,8(図1では右側のみ示している)と、膝関節部6,6と足関節部8,8とを連結するための一対の下腿部平行リンク9A,9Bと、足関節部8,8から下方に延出され、足部を構成する足部用リンク10と、該足部用リンク10の遊端部(下端部)に固定された下面が円弧状に形成された接地足11とを備えている。前記大腿部平行リンク7A,7B、下腿部平行リンク9A,9B、足部用リンク10は、軽量化を図るために一側が開放された断面形状がコの字状に形成されているが、板状あるいはパイプ状であってもよい。
【0027】
また、前記大腿部平行リンク7A,7Bのうちの一方(図1では前側)の大腿部リンク7Aの膝関節側端部に、ギヤ12が固定され、該ギヤ12と噛合うようにギヤ12を備える大腿部リンク7Aと同一側(前側)の下腿部リンク9Aの膝関節側端部に固定された連動ギヤ13と、足部用リンク10の足関節部側端部に固定されたギヤ14と、このギヤ14に噛み合うように前記下腿部平行リンクの他方の下腿部リンク9Bの足関節部側端部に固定されたギヤ15とを備えるとともに、前記股関節部5を回動させるためのアクチュエータとしての電動モータ(サーボモータ)16を該股関節部5に備えさせている。
【0028】
従って、電動モータ16を所定角度正転方向に駆動した後、逆転方向に駆動することによって、可動脚2を前後に振ることで歩行することができるようになっている。つまり、電動モータ16の駆動で大腿部リンク7A,7Bが後述の支軸17A回りで揺動操作されることによって、ギヤ連動された下腿部リンク9A,9Bが膝関節部6,6に対して大腿部平行リンク7A,7Bとは反対側にギヤ13,18(ギヤ18は後述する)の支軸回りで揺動操作されるとともに、足部用リンク10が足関節部8,8に対して下腿部リンク9A,9Bとは反対側にギヤ14の支軸回りで揺動操作され、可動脚2が、図7(a)の屈曲動作と図7(b)の伸展動作とを交互に行うように構成している。
【0029】
前記股関節部5,5間には、電動モータ16の出力ギヤ16Aと噛合うギヤ17(出力ギヤ16Aよりも大径にしている)を備えており、このギヤ17の支軸17Aが内側の股関節部5を貫通して前記支持部材4に貫通支持されている。従って、電動モータ16を駆動することによって、軸に固定されたギヤ17の周囲を股関節部5が回転することができるように構成している。
【0030】
また、前記下腿部リンク9Bの膝関節部側端部には、前記ギヤ17よりも大径なギヤ18が固定されており、このギヤ18に噛合う屈伸動作補助用の電動モータ(サーボモータ)19を膝関節部6,6に備えている。この電動モータ19は、前記電動モータ16と同一であり、膝関節部6,6の屈曲動作と伸展動作とを行うようにしている。このように電動モータ19により、膝関節部6,6の屈曲させる場合には、リンク同士がギヤ連動されていることから、動き出した大腿部平行リンク7A,7B及び下腿部平行リンク9A,9Bなどの慣性力を利用することができる。その結果、屈曲させるための電動モータ19の動力を低減することができる。また、伸展動作では、大腿部平行リンク7A,7B及び下腿部平行リンク9A,9Bなどの自重により伸びようとする戻り力を利用することができるから、その分伸展させるための電動モータ19の動力を低減することができる。従って、リンク同士をギヤ連動しないで、股関節部5、膝関節部6、足関節部8を3つの電動モータで独立して駆動する構成に比べて消費電力を飛躍的に低減することができる。
【0031】
前記電動モータ19を次のように構成すれば、更に消費電力の低減を図ることができる。つまり、歩行時において前記可動脚2が屈伸動作(図7(a)参照)から伸展動作(図7(b)参照)に移行する際に可動脚2が伸展することを妨げるためのブレーキ手段として電動モータ19を用いる場合である。具体的には、可動脚2が伸展するときには、電動モータ19を駆動させることにより下腿部平行リンク9A,9Bが伸びようとすることを遅らせるようにしている。このように構成することによって、歩行時に接地足11が不測に地面に当たって躓くことを回避することができ、良好な歩行を行わせることができるようにしている。従って、屈伸動作時には、電動モータ19を駆動しないようにしているから、その分消費電力の低減を図ることができる。この屈伸動作時に、電動モータ19とギヤ18との連動状態を遮断するためのクラッチを両者間、または電動モータ19側に設けて実施することになる。
【0032】
前記後側の可動脚3は、前側の可動脚2と基本構成が同じであるが、リンクの長さを変更するとともにリンクを連動させるギヤの前後の配置を変更することで、図1に示すように前側の可動脚2の姿勢と異なる姿勢となるようにしている。
【0033】
具体的には、ほぼ台形状で板状の左右一対の股関節部20,20(図1が側面図であるため、右側しか見えていない)と、股関節部20,20よりも下方に位置する円形で板状の左右一対の膝関節部21,21(図1が側面図であるため、右側しか見えていない)と、股関節部20,20と膝関節部21,21とを連結するための一対の大腿部平行リンク22A,22Bと、膝関節部21,21よりも下方に位置するほぼ三角形状で板状の左右一対の足関節部22,22(図1では右側のみ示している)と、膝関節部21,21と足関節部22,22とを連結するための一対の下腿部平行リンク23A,23Bと、足関節部8,8から下方に延出され、足部を構成する足部用リンク24と、該足部用リンク24の遊端部(下端部)に固定された下面が円弧状に形成された接地足25とを備えている。前記大腿部平行リンク22A,22B、下腿部平行リンク23A,23B、足部用リンク24は、軽量化を図るために一側が開放された断面形状がコの字状に形成されているが、板状あるいはパイプ状であってもよい。
【0034】
また、前記大腿部平行リンク22A,22Bのうちの一方(図1では後側)の大腿部リンク22Bの膝関節側端部に、ギヤ26が固定され、該ギヤ26と噛合うようにギヤ26を備える大腿部リンク22Bと同一側(後側)の下腿部リンク23Bの膝関節側端部に固定された連動ギヤ27と、足部用リンク24の足関節部側端部に固定されたギヤ28と、このギヤ28に噛み合うように前記下腿部平行リンクの他方の下腿部リンク23Bの足関節部側端部に固定されたギヤ29とを備えるとともに、前記股関節部5を回動させるためのアクチュエータとしての電動モータ(サーボモータ)30を該股関節部20に備えさせている。
【0035】
従って、電動モータ30を所定角度正転方向に駆動した後、逆転方向に駆動することによって、可動脚3を前後に振ることで歩行することができるようになっている。つまり、電動モータ30の駆動で大腿部リンク22A,22Bが後述の支軸31A回りで揺動操作されることによって、ギヤ連動された下腿部リンク23A,23Bが膝関節部21,21に対して大腿部平行リンク22A,22Bとは反対側にギヤ27,32(ギヤ32は後述する)の支軸回りで揺動操作されるとともに、足部用リンク24が足関節部22,22に対して下腿部リンク23A,23Bとは反対側にギヤ28の支軸回りで揺動操作され、可動脚3が、屈曲動作と伸展動作とを交互に行うように構成している。
【0036】
前記股関節部20,20間には、電動モータ30の出力ギヤ30Aと噛合うギヤ31(出力ギヤ30Aよりも大径にしている)を備えており、このギヤ31の支軸31Aが内側の股関節部20を貫通して前記支持部材4に貫通支持されている。従って、電動モータ30を駆動することによって、軸に固定されたギヤ31の周囲を股関節部20が回転することができるように構成している。
【0037】
また、前記下腿部リンク23Aの膝関節部側端部には、前記ギヤ31よりも大径なギヤ32が固定されており、このギヤ32に噛合う屈伸動作補助用の電動モータ(サーボモータ)33を膝関節部6,6に備えている。この電動モータ33は、前記電動モータ30と同一であり、膝関節部6,6の屈曲動作と伸展動作とを行うようにしている。このように電動モータ33により、膝関節部6,6の屈曲させる場合には、リンク同士がギヤ連動されていることから、動き出した大腿部平行リンク22A,22B及び下腿部平行リンク23A,23Bなどの重力による慣性力を利用することができる。その結果、屈曲させるための電動モータ30の動力を低減することができる。また、伸展動作では、大腿部平行リンク22A,22B及び下腿部平行リンク23A,23Bなどの自重により伸びようとする戻り力を利用することができるから、その分伸展させるための電動モータ33の動力を低減することができる。従って、リンク同士をギヤ連動しないで、股関節部20、膝関節部21、足関節部22を3つの電動モータで独立して駆動する構成に比べて消費電力を飛躍的に低減することができる。
【0038】
前記電動モータ33を次のように構成すれば、更に消費電力の低減を図ることができる。つまり、歩行時において前記可動脚2が屈伸動作から伸展動作に移行する際に可動脚3が伸展することを妨げるためのブレーキ手段として電動モータ33を用いる場合である。具体的には、可動脚3が伸展するときには、電動モータ33を駆動させることにより下腿部平行リンク23A,23Bが伸展することを遅らせるようにしている。このように構成することによって、歩行時に接地足11が不測に地面に当たって躓くことを回避することができ、良好な歩行を行わせることができるようにしている。従って、屈伸動作時には、電動モータ33を駆動しないようにしているから、その分消費電力の低減を図ることができる。この屈伸動作時に、電動モータ33とギヤ32との連動状態を遮断するためのクラッチを両者間、または電動モータ33側に設けて実施することになる。
【0039】
四足歩行ロボットの歩行には、クロール歩行やトロット歩行などがあるが、どのような歩行であってもよい。また、四足歩行ロボットの歩行制御としては、PTP制御やCP制御などがあるが、どのような歩行制御であってもよい。
【0040】
尚、本発明は、前記実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲で種々の変更が可能である。
【0041】
前記実施形態では、ブレーキ手段として、電動モータ19,33を用いたが、電磁ブレーキや磁性流体ブレーキなど、各種の制動装置を用いてもよい。また、ブレーキ手段として、回転ダンパーを用いてもよい。この場合、可動脚2,3の伸展時においてのみ作用するように一方向クラッチを併用することになる。
【0042】
また、前記実施形態では、足関節部8,8に足部用リンク10を介して接地足11を取り付けたが、足部用リンク10を省略し、足関節部8,8に接地足11を直接取り付けてもよいし、足関節部8,8が接地足11を兼用構成してもよい。
【符号の説明】
【0043】
1…支持フレーム、1A…フレーム本体、1B…補強フレーム、2,3…可動脚、4…支持部材、5…股関節部、5,20…股関節部、6,21…膝関節部、7A,7B…大腿部平行リンク、7a,7b…支軸、8,22…足関節部、9A,9B…下腿部平行リンク、10…足部用リンク、11…接地足、12,14,15,17,18…ギヤ、13,18…連動ギヤ、13a,14a,17A,18a…支軸、16,19,30,33…電動モータ、16A…出力ギヤ、22A,22B…大腿部平行リンク、23A,23B…下腿部平行リンク、24…足部用リンク、25…接地足、26,28,29,31,32…ギヤ、27…連動ギヤ、30,33…電動モータ、30A…出力ギヤ、31A…支軸
【技術分野】
【0001】
本発明は、少なくとも複数本の可動脚を備えたロボットに関する。
【背景技術】
【0002】
近年、さまざまなロボットの開発が行われているが、高齢者や障害者にとって最適な生活支援用のロボット(介助用ロボット)の開発が望まれているが、成体としてのロボット開発は、未だ多くないのが現状である。
その中でも、例えば、多関節からなる可動脚を、関節毎に備えたアクチュエータにより歩行動作を行わせるものが提案されている。
【0003】
具体的には、腰部フレームに取り付けられた股関節アクチュエータと、股関節アクチュエータから大腿部フレームを介して連結される膝関節アクチュエータと、膝関節アクチュエータから頸部フレームを介して連結される足関節アクチュエータとを備えて、それら3個のアクチュエータの駆動を操作することによって、可動脚を屈伸及び伸展させることで歩行を行わせることができるようにしている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2001−287177号公報(図2参照)
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記特許文献1の構成によれば、すべての関節にアクチュエータを備えさせていることから、可動脚の構成が複雑になるだけでなく、脚毎に3個のアクチュエータを駆動するためのエネルギーコストも多くかかる不都合が発生していた。特に介助用ロボットとしては、長時間に渡って使用することができる省エネ型のロボットを開発することが最大の課題になっている。
【0006】
本発明が前述の状況に鑑み、解決しようとするところは、簡素な構成にすることができ、しかも省エネ型に構成することができるロボットを提供することを課題とする。
【課題を解決するための手段】
【0007】
本発明のロボットは、前述の課題解決のために、少なくとも複数本の可動脚を備えたロボットであって、前記可動脚は、胴体部に回転自在に備えた股関節部と、該股関節部から一対の大腿部平行リンクを介して連結される膝関節部と、該膝関節部から一対の下腿部平行リンクを介して連結される足関節部と、前記大腿部平行リンクのうちの一方の大腿部リンクの膝関節側端部に固定されたギヤと、該ギヤと噛合うように該ギヤを備える大腿部リンクと同一側の下腿部リンクの膝関節側端部に固定された連動ギヤと、前記股関節部を回動させるためのアクチュエータとを備えさせたことを特徴としている。
【0008】
上記構成によれば、アクチュエータを駆動することによって、股関節部が回転し、その回転に伴って、ギヤを介して連動されている大腿部平行リンク及び下腿部平行リンクが屈曲動作を行う。また、屈伸動作後、アクチュエータを前記とは反対方向に駆動することによって、ギヤを介して連動している大腿部平行リンク及び下腿部平行リンクが伸展動作を行う。そして、二足歩行用のロボットであれば、例えば左右の可動脚を交互に前記屈曲動作と伸展動作を行うことによって、歩行することができ、四足歩行ロボットであれば、一脚ずつ又は対向する二脚ずつを前記屈曲動作と伸展動作を行うことによって、歩行することができる。前記屈曲動作では、屈曲動作開始後において動き出した大腿部平行リンク及び下腿部平行リンクなどの重力による慣性力を利用することができるから、その分屈曲させるためのアクチュエータの動力を低減することができる。また、伸展動作では、大腿部平行リンク及び下腿部平行リンクなどの自重により伸びようとする戻り力を利用することができるから、その分伸展させるためのアクチュエータの動力を低減することができる。
【0009】
また、本発明のロボットは、前記足関節部から足部を構成する足部用リンクと、該足部用リンクの遊端部に固定された接地足と、該足部用リンクの足関節部側端部に固定されたギヤと、このギヤに噛み合うように前記下腿部平行リンクの他方の下腿部リンクの足関節部側端部に固定されたギヤとを備えていてもよい。
【0010】
また、本発明のロボットは、前記下腿部平行リンクの他方の下腿部リンクの股関節部側端部に固定されたギヤと、該ギヤに噛み合うように前記股関節部に固定され、歩行時において前記可動脚が屈伸動作から伸展動作に移行する際に該可動脚が伸展することを妨げるためのブレーキ手段を備えていてもよい。
【0011】
上記構成にしておけば、歩行時において前記可動脚が屈伸動作から伸展動作に移行する際に可動脚が必要以上に伸展動作してしまい、可動脚の接地足の下端が地面に接地するといったことがない。従って、躓くことがない良好な歩行を行わせることができる。この場合、ブレーキ手段としては、電磁ブレーキの他、電動モータや回転ダンパーなどを用いることができる。電動モータを用いる場合には、可動脚が屈伸動作から伸展動作に移行するときのみ駆動するようにすれば、電動モータの駆動による電力を低減することができる。また、回転ダンパーを用いる場合には、可動脚が屈伸動作から伸展動作に移行する際にのみ作用するように、一方向クラッチを併用することが好ましい。
【発明の効果】
【0012】
大腿部平行リンクと下腿部平行リンクとをギヤを用いて連動しておけば、股関節部を回動させるためのアクチュエータを備えさせるだけの簡素な構成で、可動脚を屈曲動作と伸展動作とを行わせることができるから、アクチュエータの数を減らすことができるだけでなく、可動脚の自重を利用してアクチュエータの動力を低減することができる。従って、特に介助用ロボットに望まれる省エネ型のロボットを提供することができる。
【図面の簡単な説明】
【0013】
【図1】胴体部を省略した歩行ロボットの可動脚の側面図である。
【図2】図1で示した可動脚の正面図である。
【図3】図1で示した可動脚の股関節部の拡大側面図である。
【図4】図1で示した可動脚の股関節部の拡大正面図である。
【図5】四足歩行ロボットの側面図である。
【図6】(a)は、可動脚の初期姿勢をθ1=180[deg.]とし、前方へ45°、後方へ60°、ゆっくりと股関節部を回転させて可動脚を振り、静止させたときに自重により釣り合ったときの各関節中心をプロットし、そのプロットした点を結んで構成したグラフであり、(b)は、静的な釣り合いから理論上で求めた膝関節部の屈曲角と図6(a)で示した実験結果とを示したグラフである。
【図7】(a)は、股関節のみを回転させることにより可動脚の膝関節を屈伸させた状態を示す可動脚の概略図、(b)は、股関節のみを回転させることにより可動脚の膝関節を伸展させた状態を示す可動脚の概略図である。
【発明を実施するための形態】
【0014】
図1〜図4には、介助用ロボットに用いられる最適な省エネ型の本発明の可動脚2を示している。この可動脚2は、二足歩行ロボットや四足歩行ロボットに用いられるが、二足以上であれば、どのような足数のロボットにも用いることができる。尚、図1において右側を前側とし、左側を後側として説明する。
【0015】
前記可動脚2は、図1及び図2に示すように、ほぼ台形状で板状の左右一対の股関節部5,5と、股関節部5,5よりも下方に位置する円形で板状の左右一対の膝関節部6,6と、股関節部5,5と膝関節部6,6とを連結するための一対の大腿部平行リンク7A,7Bと、膝関節部6,6よりも下方に位置するほぼ三角形状で板状の左右一対の足関節部8,8と、膝関節部6,6と足関節部8,8とを連結するための一対の下腿部平行リンク9A,9Bと、足関節部8,8から下方に延出され、足部を構成する足部用リンク10と、該足部用リンク10の遊端部(下端部)に固定された下面が円弧状に形成された接地足11とを備えている。前記大腿部平行リンク7A,7B、下腿部平行リンク9A,9B、足部用リンク10は、軽量化を図るために一側が開放された断面形状がコの字状に形成されているが、板状あるいはパイプ状であってもよい。
【0016】
また、前記大腿部平行リンク7A,7Bのうちの一方(前側)の大腿部リンク7Aの膝関節側端部に、ギヤ12が固定され、該ギヤ12と噛合うようにギヤ12を備える大腿部リンク7Aと同一側(前側)の下腿部リンク9Aの膝関節側端部に固定された連動ギヤ13と、足部用リンク10の足関節部側端部に固定されたギヤ14と、このギヤ14に噛み合うように前記下腿部平行リンクの他方の下腿部リンク9Bの足関節部側端部に固定されたギヤ15とを備えるとともに、前記股関節部5を回動させるためのアクチュエータとしての電動モータ(サーボモータ)16を該股関節部5に備えさせている。
【0017】
従って、電動モータ16を所定角度正転方向に駆動した後、逆転方向に駆動することによって、可動脚2を前後に振ることで歩行することができるようになっている。つまり、電動モータ16の駆動で大腿部リンク7A,7Bが、図3に示すように股関節部5に取り付けられている支軸7a,7b回りで揺動操作されることによって、ギヤ連動された下腿部リンク9A,9Bが膝関節部6,6に対して大腿部平行リンク7A,7Bとは反対側にギヤ13,18(ギヤ18は後述する)の支軸13a,18a回りで揺動操作されるとともに、足部用リンク10が足関節部8,8に対して下腿部リンク9A,9Bとは反対側にギヤ14の支軸14a回りで揺動操作され、可動脚2が、図7(a)の屈曲動作と図7(b)の伸展動作とを行うように構成している。
【0018】
前記股関節部5,5間には、電動モータ16の出力ギヤ16Aと噛合うギヤ17(出力ギヤ16Aよりも大径にしている)を備えており、このギヤ17の支軸17Aが内側の股関節部5を貫通して図示していない胴体部(又は胴体部を載置する支持フレームなど)に貫通支持されている。従って、電動モータ16を駆動することによって、軸に固定されたギヤ17の周囲を股関節部5が回転することができるように構成している。
【0019】
また、前記下腿部リンク9Bの膝関節部側端部には、前記ギヤ17よりも大径なギヤ18が固定されており、このギヤ18に噛合う屈伸動作補助用の電動モータ(サーボモータ)19を膝関節部6,6に備えている。この電動モータ19は、前記電動モータ16と同一であり、膝関節部6,6の屈曲動作と伸展動作とを行うようにしている。このように電動モータ19により、膝関節部6,6の屈曲させる場合には、リンク同士がギヤ連動されていることから、動き出した大腿部平行リンク7A,7B及び下腿部平行リンク9A,9Bなどの慣性力を利用することができる。その結果、屈曲させるための電動モータ19の動力を低減することができる。また、伸展動作では、大腿部平行リンク7A,7B及び下腿部平行リンク9A,9Bなどの自重により伸びようとする戻り力を利用することができるから、その分伸展させるための電動モータ19の動力を低減することができる。従って、リンク同士をギヤ連動しないで、股関節部5、膝関節部6、足関節部8を3つの電動モータで独立して駆動する構成に比べて、消費電力を飛躍的に低減することができる利点がある。
【0020】
前記電動モータ19を次のように構成すれば、更に消費電力の低減を図ることができる。つまり、歩行時において前記可動脚2が屈伸動作(図7(a)参照)から伸展動作(図7(b)参照)に移行する際に可動脚2が伸展することを妨げるためのブレーキ手段として電動モータ19を用いる場合である。具体的には、可動脚2が伸展するときには、電動モータ19を駆動させることにより下腿部平行リンク9A,9Bが伸びようとすることを遅らせるようにしている。このように構成することによって、歩行時に接地足11が不測に地面に当たって躓くことを回避することができ、良好な歩行を行わせることができるようにしている。従って、屈伸動作時には、電動モータ19を駆動しないようにしているから、その分消費電力の低減を図ることができる。この屈伸動作時に、電動モータ19とギヤ18との連動状態を遮断するためのクラッチを両者間、または電動モータ19側に設けて実施することになる。
【0021】
このように構成された可動脚2は、電動モータ16を所定角度正転方向に駆動した後、逆転方向に駆動することによって、前後に振ることで歩行動作を行うことができるようになっている。尚、屈伸動作補助用の電動モータ19も前記電動モータ16に連動して駆動することになる。つまり、電動モータ16の駆動で股関節部5が回転することによって、大腿部リンク7A,7Bが支軸7a,7b回りで揺動操作される。そして、ギヤ連動された下腿部リンク9A,9Bが膝関節部6,6に対して大腿部平行リンク7A,7Bとは反対側にギヤ13,18(ギヤ18は後述する)の支軸13a,18a回りで揺動操作されるとともに、足部用リンク10が足関節部8,8に対して下腿部リンク9A,9Bとは反対側にギヤ14の支軸14a回りで揺動操作され、可動脚2が、図7(a)の屈曲動作と図7(b)の伸展動作とを交互に行って歩行動作を行うように構成されている。尚、前記下腿部リンク9A,9Bの揺動時には、前記電動モータ19の駆動力が補助することになる。
【0022】
前記2つの電動モータ16,19のうちの屈伸動作補助用の電動モータ19を用いないで1つの電動モータ16のみで可動脚2を屈伸動作と伸展動作とを行う場合について説明する。この場合、可動脚2の重量が変化しないように、電動モータ19を取り外すことなく、電動モータ19とギヤ18との噛合いを解除している。そして、このように構成した可動脚2を電動モータ16のみの駆動で屈曲させたときの実験結果を、図6(a)に示している。具体的には、可動脚2の初期姿勢をθ1=180[deg]とし、前方へ45°、後方へ60°、ゆっくりと股関節部5を電動モータ16により回転させて可動脚2を振り、静止させた状態で可動脚2の自重により釣り合った時の各関節部の中心を結んでグラフにしている。このグラフから、股関節部5の回転で膝関節部6に電動モータ19により回転トルクを印加しなくても、ギヤ連動している膝関節部以下の可動脚2の形状が自ずと変化し、遊脚期間(接地足11が空中に存在している期間)の可動脚2の姿勢に有効であることが判る。
【0023】
また、図6(b)では、静的な釣り合いから理論上求めた膝関節部6の屈曲角と、図6(a)で示した実験結果との比較をグラフにしたものであり、実線が理論値であり、破線が計測値である。図6(b)では、両方の角度とも同じような角度になっており、膝関節部6以下の重量配分を調整することによって膝関節部6の屈曲量を増減させることが可能である。このことから、膝関節部6に設けた電動モータ19の小型化に大きく寄与することは勿論のこと、電動モータ19を省略しても可動脚2の良好な屈曲ができることがわかる。
【0024】
図5に、前記可動脚2を用いた四足歩行ロボットを示している。この四足歩行ロボットは、支持フレーム1の前部に、前記可動脚2と同一の左右一対の前側可動脚2,2(図1が側面図であるため、右側の可動脚しか見えていない)を備え、支持フレーム1の後部に、前記可動脚とは異なる左右一対の後側可動脚3,3(図1が側面図であるため、右側の可動脚しか見えていない)を備えている。
【0025】
前記支持フレーム1は、下向きに突出屈曲されたほぼ逆アーチ型のフレーム本体1Aと、このフレーム本体1Aの前後端を前後方向で連結する一直線状の補強フレーム1Bとを備え、前記補強フレーム1Bの前後の上面のそれぞれには、前記前後の可動脚2,2、3,3の上端を支持するための支持部材4を備えている。
【0026】
前記前側の可動脚2は、前記と同様に、ほぼ台形状で板状の左右一対の股関節部5,5(図1が側面図であるため、右側しか見えていない)と、股関節部5,5よりも下方に位置する円形で板状の左右一対の膝関節部6,6(図1が側面図であるため、右側しか見えていない)と、股関節部5,5と膝関節部6,6とを連結するための一対の大腿部平行リンク7A,7Bと、膝関節部6,6よりも下方に位置するほぼ三角形状で板状の左右一対の足関節部8,8(図1では右側のみ示している)と、膝関節部6,6と足関節部8,8とを連結するための一対の下腿部平行リンク9A,9Bと、足関節部8,8から下方に延出され、足部を構成する足部用リンク10と、該足部用リンク10の遊端部(下端部)に固定された下面が円弧状に形成された接地足11とを備えている。前記大腿部平行リンク7A,7B、下腿部平行リンク9A,9B、足部用リンク10は、軽量化を図るために一側が開放された断面形状がコの字状に形成されているが、板状あるいはパイプ状であってもよい。
【0027】
また、前記大腿部平行リンク7A,7Bのうちの一方(図1では前側)の大腿部リンク7Aの膝関節側端部に、ギヤ12が固定され、該ギヤ12と噛合うようにギヤ12を備える大腿部リンク7Aと同一側(前側)の下腿部リンク9Aの膝関節側端部に固定された連動ギヤ13と、足部用リンク10の足関節部側端部に固定されたギヤ14と、このギヤ14に噛み合うように前記下腿部平行リンクの他方の下腿部リンク9Bの足関節部側端部に固定されたギヤ15とを備えるとともに、前記股関節部5を回動させるためのアクチュエータとしての電動モータ(サーボモータ)16を該股関節部5に備えさせている。
【0028】
従って、電動モータ16を所定角度正転方向に駆動した後、逆転方向に駆動することによって、可動脚2を前後に振ることで歩行することができるようになっている。つまり、電動モータ16の駆動で大腿部リンク7A,7Bが後述の支軸17A回りで揺動操作されることによって、ギヤ連動された下腿部リンク9A,9Bが膝関節部6,6に対して大腿部平行リンク7A,7Bとは反対側にギヤ13,18(ギヤ18は後述する)の支軸回りで揺動操作されるとともに、足部用リンク10が足関節部8,8に対して下腿部リンク9A,9Bとは反対側にギヤ14の支軸回りで揺動操作され、可動脚2が、図7(a)の屈曲動作と図7(b)の伸展動作とを交互に行うように構成している。
【0029】
前記股関節部5,5間には、電動モータ16の出力ギヤ16Aと噛合うギヤ17(出力ギヤ16Aよりも大径にしている)を備えており、このギヤ17の支軸17Aが内側の股関節部5を貫通して前記支持部材4に貫通支持されている。従って、電動モータ16を駆動することによって、軸に固定されたギヤ17の周囲を股関節部5が回転することができるように構成している。
【0030】
また、前記下腿部リンク9Bの膝関節部側端部には、前記ギヤ17よりも大径なギヤ18が固定されており、このギヤ18に噛合う屈伸動作補助用の電動モータ(サーボモータ)19を膝関節部6,6に備えている。この電動モータ19は、前記電動モータ16と同一であり、膝関節部6,6の屈曲動作と伸展動作とを行うようにしている。このように電動モータ19により、膝関節部6,6の屈曲させる場合には、リンク同士がギヤ連動されていることから、動き出した大腿部平行リンク7A,7B及び下腿部平行リンク9A,9Bなどの慣性力を利用することができる。その結果、屈曲させるための電動モータ19の動力を低減することができる。また、伸展動作では、大腿部平行リンク7A,7B及び下腿部平行リンク9A,9Bなどの自重により伸びようとする戻り力を利用することができるから、その分伸展させるための電動モータ19の動力を低減することができる。従って、リンク同士をギヤ連動しないで、股関節部5、膝関節部6、足関節部8を3つの電動モータで独立して駆動する構成に比べて消費電力を飛躍的に低減することができる。
【0031】
前記電動モータ19を次のように構成すれば、更に消費電力の低減を図ることができる。つまり、歩行時において前記可動脚2が屈伸動作(図7(a)参照)から伸展動作(図7(b)参照)に移行する際に可動脚2が伸展することを妨げるためのブレーキ手段として電動モータ19を用いる場合である。具体的には、可動脚2が伸展するときには、電動モータ19を駆動させることにより下腿部平行リンク9A,9Bが伸びようとすることを遅らせるようにしている。このように構成することによって、歩行時に接地足11が不測に地面に当たって躓くことを回避することができ、良好な歩行を行わせることができるようにしている。従って、屈伸動作時には、電動モータ19を駆動しないようにしているから、その分消費電力の低減を図ることができる。この屈伸動作時に、電動モータ19とギヤ18との連動状態を遮断するためのクラッチを両者間、または電動モータ19側に設けて実施することになる。
【0032】
前記後側の可動脚3は、前側の可動脚2と基本構成が同じであるが、リンクの長さを変更するとともにリンクを連動させるギヤの前後の配置を変更することで、図1に示すように前側の可動脚2の姿勢と異なる姿勢となるようにしている。
【0033】
具体的には、ほぼ台形状で板状の左右一対の股関節部20,20(図1が側面図であるため、右側しか見えていない)と、股関節部20,20よりも下方に位置する円形で板状の左右一対の膝関節部21,21(図1が側面図であるため、右側しか見えていない)と、股関節部20,20と膝関節部21,21とを連結するための一対の大腿部平行リンク22A,22Bと、膝関節部21,21よりも下方に位置するほぼ三角形状で板状の左右一対の足関節部22,22(図1では右側のみ示している)と、膝関節部21,21と足関節部22,22とを連結するための一対の下腿部平行リンク23A,23Bと、足関節部8,8から下方に延出され、足部を構成する足部用リンク24と、該足部用リンク24の遊端部(下端部)に固定された下面が円弧状に形成された接地足25とを備えている。前記大腿部平行リンク22A,22B、下腿部平行リンク23A,23B、足部用リンク24は、軽量化を図るために一側が開放された断面形状がコの字状に形成されているが、板状あるいはパイプ状であってもよい。
【0034】
また、前記大腿部平行リンク22A,22Bのうちの一方(図1では後側)の大腿部リンク22Bの膝関節側端部に、ギヤ26が固定され、該ギヤ26と噛合うようにギヤ26を備える大腿部リンク22Bと同一側(後側)の下腿部リンク23Bの膝関節側端部に固定された連動ギヤ27と、足部用リンク24の足関節部側端部に固定されたギヤ28と、このギヤ28に噛み合うように前記下腿部平行リンクの他方の下腿部リンク23Bの足関節部側端部に固定されたギヤ29とを備えるとともに、前記股関節部5を回動させるためのアクチュエータとしての電動モータ(サーボモータ)30を該股関節部20に備えさせている。
【0035】
従って、電動モータ30を所定角度正転方向に駆動した後、逆転方向に駆動することによって、可動脚3を前後に振ることで歩行することができるようになっている。つまり、電動モータ30の駆動で大腿部リンク22A,22Bが後述の支軸31A回りで揺動操作されることによって、ギヤ連動された下腿部リンク23A,23Bが膝関節部21,21に対して大腿部平行リンク22A,22Bとは反対側にギヤ27,32(ギヤ32は後述する)の支軸回りで揺動操作されるとともに、足部用リンク24が足関節部22,22に対して下腿部リンク23A,23Bとは反対側にギヤ28の支軸回りで揺動操作され、可動脚3が、屈曲動作と伸展動作とを交互に行うように構成している。
【0036】
前記股関節部20,20間には、電動モータ30の出力ギヤ30Aと噛合うギヤ31(出力ギヤ30Aよりも大径にしている)を備えており、このギヤ31の支軸31Aが内側の股関節部20を貫通して前記支持部材4に貫通支持されている。従って、電動モータ30を駆動することによって、軸に固定されたギヤ31の周囲を股関節部20が回転することができるように構成している。
【0037】
また、前記下腿部リンク23Aの膝関節部側端部には、前記ギヤ31よりも大径なギヤ32が固定されており、このギヤ32に噛合う屈伸動作補助用の電動モータ(サーボモータ)33を膝関節部6,6に備えている。この電動モータ33は、前記電動モータ30と同一であり、膝関節部6,6の屈曲動作と伸展動作とを行うようにしている。このように電動モータ33により、膝関節部6,6の屈曲させる場合には、リンク同士がギヤ連動されていることから、動き出した大腿部平行リンク22A,22B及び下腿部平行リンク23A,23Bなどの重力による慣性力を利用することができる。その結果、屈曲させるための電動モータ30の動力を低減することができる。また、伸展動作では、大腿部平行リンク22A,22B及び下腿部平行リンク23A,23Bなどの自重により伸びようとする戻り力を利用することができるから、その分伸展させるための電動モータ33の動力を低減することができる。従って、リンク同士をギヤ連動しないで、股関節部20、膝関節部21、足関節部22を3つの電動モータで独立して駆動する構成に比べて消費電力を飛躍的に低減することができる。
【0038】
前記電動モータ33を次のように構成すれば、更に消費電力の低減を図ることができる。つまり、歩行時において前記可動脚2が屈伸動作から伸展動作に移行する際に可動脚3が伸展することを妨げるためのブレーキ手段として電動モータ33を用いる場合である。具体的には、可動脚3が伸展するときには、電動モータ33を駆動させることにより下腿部平行リンク23A,23Bが伸展することを遅らせるようにしている。このように構成することによって、歩行時に接地足11が不測に地面に当たって躓くことを回避することができ、良好な歩行を行わせることができるようにしている。従って、屈伸動作時には、電動モータ33を駆動しないようにしているから、その分消費電力の低減を図ることができる。この屈伸動作時に、電動モータ33とギヤ32との連動状態を遮断するためのクラッチを両者間、または電動モータ33側に設けて実施することになる。
【0039】
四足歩行ロボットの歩行には、クロール歩行やトロット歩行などがあるが、どのような歩行であってもよい。また、四足歩行ロボットの歩行制御としては、PTP制御やCP制御などがあるが、どのような歩行制御であってもよい。
【0040】
尚、本発明は、前記実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲で種々の変更が可能である。
【0041】
前記実施形態では、ブレーキ手段として、電動モータ19,33を用いたが、電磁ブレーキや磁性流体ブレーキなど、各種の制動装置を用いてもよい。また、ブレーキ手段として、回転ダンパーを用いてもよい。この場合、可動脚2,3の伸展時においてのみ作用するように一方向クラッチを併用することになる。
【0042】
また、前記実施形態では、足関節部8,8に足部用リンク10を介して接地足11を取り付けたが、足部用リンク10を省略し、足関節部8,8に接地足11を直接取り付けてもよいし、足関節部8,8が接地足11を兼用構成してもよい。
【符号の説明】
【0043】
1…支持フレーム、1A…フレーム本体、1B…補強フレーム、2,3…可動脚、4…支持部材、5…股関節部、5,20…股関節部、6,21…膝関節部、7A,7B…大腿部平行リンク、7a,7b…支軸、8,22…足関節部、9A,9B…下腿部平行リンク、10…足部用リンク、11…接地足、12,14,15,17,18…ギヤ、13,18…連動ギヤ、13a,14a,17A,18a…支軸、16,19,30,33…電動モータ、16A…出力ギヤ、22A,22B…大腿部平行リンク、23A,23B…下腿部平行リンク、24…足部用リンク、25…接地足、26,28,29,31,32…ギヤ、27…連動ギヤ、30,33…電動モータ、30A…出力ギヤ、31A…支軸
【特許請求の範囲】
【請求項1】
少なくとも複数本の可動脚を備えたロボットであって、
前記可動脚は、胴体部に回転自在に備えた股関節部と、該股関節部から一対の大腿部平行リンクを介して連結される膝関節部と、該膝関節部から一対の下腿部平行リンクを介して連結される足関節部と、前記大腿部平行リンクのうちの一方の大腿部リンクの膝関節側端部に固定されたギヤと、該ギヤと噛合うように該ギヤを備える大腿部リンクと同一側の下腿部リンクの膝関節側端部に固定された連動ギヤと、前記股関節部を回動させるためのアクチュエータとを備えさせたことを特徴とするロボット。
【請求項2】
前記足関節部から足部を構成する足部用リンクと、該足部用リンクの遊端部に固定された接地足と、該足部用リンクの足関節部側端部に固定されたギヤと、このギヤに噛み合うように前記下腿部平行リンクの他方の下腿部リンクの足関節部側端部に固定されたギヤとを備えたことを特徴とする請求項1に記載のロボット。
【請求項3】
前記下腿部平行リンクの他方の下腿部リンクの股関節部側端部に固定されたギヤと、該ギヤに噛み合うように前記股関節部に固定され、歩行時において前記可動脚が屈伸動作から伸展動作に移行する際に該可動脚が伸展することを妨げるためのブレーキ手段を備えたことを特徴とする請求項2に記載のロボット。
【請求項1】
少なくとも複数本の可動脚を備えたロボットであって、
前記可動脚は、胴体部に回転自在に備えた股関節部と、該股関節部から一対の大腿部平行リンクを介して連結される膝関節部と、該膝関節部から一対の下腿部平行リンクを介して連結される足関節部と、前記大腿部平行リンクのうちの一方の大腿部リンクの膝関節側端部に固定されたギヤと、該ギヤと噛合うように該ギヤを備える大腿部リンクと同一側の下腿部リンクの膝関節側端部に固定された連動ギヤと、前記股関節部を回動させるためのアクチュエータとを備えさせたことを特徴とするロボット。
【請求項2】
前記足関節部から足部を構成する足部用リンクと、該足部用リンクの遊端部に固定された接地足と、該足部用リンクの足関節部側端部に固定されたギヤと、このギヤに噛み合うように前記下腿部平行リンクの他方の下腿部リンクの足関節部側端部に固定されたギヤとを備えたことを特徴とする請求項1に記載のロボット。
【請求項3】
前記下腿部平行リンクの他方の下腿部リンクの股関節部側端部に固定されたギヤと、該ギヤに噛み合うように前記股関節部に固定され、歩行時において前記可動脚が屈伸動作から伸展動作に移行する際に該可動脚が伸展することを妨げるためのブレーキ手段を備えたことを特徴とする請求項2に記載のロボット。
【図1】


【図2】

【図3】

【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2011−125966(P2011−125966A)
【公開日】平成23年6月30日(2011.6.30)
【国際特許分類】
【出願番号】特願2009−287176(P2009−287176)
【出願日】平成21年12月18日(2009.12.18)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 平成21年9月15日 社団法人 日本ロボット協会主催の「第27回日本ロボット学会 学術講演会」において文書をもって発表
【出願人】(399030060)学校法人 関西大学 (208)
【Fターム(参考)】
【公開日】平成23年6月30日(2011.6.30)
【国際特許分類】
【出願日】平成21年12月18日(2009.12.18)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 平成21年9月15日 社団法人 日本ロボット協会主催の「第27回日本ロボット学会 学術講演会」において文書をもって発表
【出願人】(399030060)学校法人 関西大学 (208)
【Fターム(参考)】
[ Back to top ]