
ロンジ突合継手自動溶接ロボット
【課題】小型、軽量で工具なしで組立と分解が容易に行え、ロンジへの取付けの段取作業、溶接作業、片付け作業までを1人で可能とすること。
【解決手段】ボトムロンジフェース104間に着脱自在な走行レール21と、走行レール上を自走する走行駆動体22とからなる走行ユニット2と、走行駆動体に着脱可能に立設され昇降軸支持体23と、昇降軸支持体に設けられた昇降用ネジ軸24に螺合して上下動する昇降駆動体25とからなる昇降ユニット3と、昇降駆動体にマニプレータ部固定クランプ26により取付られたマニプレータ支持体27と、マニプレータ支持体に取付られた前後軸部28と、前後軸部に前後方向に移動するよう取付られ、旋回、回転、捻りの回転3軸を有するマニプレータ29とからなるマニプレータユニット4と、マニプレータに着脱自在に取付られたトーチホルダ5に保持され溶接トーチ6とを備えている。
【解決手段】ボトムロンジフェース104間に着脱自在な走行レール21と、走行レール上を自走する走行駆動体22とからなる走行ユニット2と、走行駆動体に着脱可能に立設され昇降軸支持体23と、昇降軸支持体に設けられた昇降用ネジ軸24に螺合して上下動する昇降駆動体25とからなる昇降ユニット3と、昇降駆動体にマニプレータ部固定クランプ26により取付られたマニプレータ支持体27と、マニプレータ支持体に取付られた前後軸部28と、前後軸部に前後方向に移動するよう取付られ、旋回、回転、捻りの回転3軸を有するマニプレータ29とからなるマニプレータユニット4と、マニプレータに着脱自在に取付られたトーチホルダ5に保持され溶接トーチ6とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はロンジ突合継手自動溶接ロボット、更に詳しくは橋梁、船舶ブロック等の鋼構造物のロンジ材及びロンジ材が取り付けられている主溝の突合継手を自動溶接するロンジ突合継手自動溶接ロボットに関するものである。
【背景技術】
【0002】
従来の自動溶接システムは、開口部を介して入出可能な閉空間内において溶接作業が必要な溶接対象箇所に自動溶接を施す自動溶接システムであって、該開口部を通じて該閉空間内に元困れ、該閉空間内で該溶接対象箇所に対応するように配置され着脱自在に取り付けられた走行レールと、該開口部を通じて該閉空間内に持ち込まれ、該走行レールを走行するように装備された移動台車及び該移動台車に取り付けられた溶接ロボットとを備え、該移動台車の該走行レールに沿った走行と該溶接ロボットの溶接アームの移動動作とを行いながら、該溶接対象箇所を自動溶接するようにしたものである(例えば、特許文献1参照)。
【特許文献1】特開平11−333592号公報(第1頁、図1)
【発明の開示】
【発明が解決しようとする課題】
【0003】
従来の自動溶接システムにおいては、溶接ロボットが取り付けられた移動台車が走行する走行レールの溶接対象箇所への取り付けに複数の支持棒を用いており、その支持棒は走行レールの支持部材に蝶ネジ等により固定され、走行レールの上下方向に突設されており、上下の各支持棒の先端がそれぞれ上部ロンジの下縁、下部ロンジの上縁に圧着して、突っ張り状態で走行レールを固定するようになっており、複数の支持棒を必要とする分だけコストがかかると共に走行レールの溶接対象箇所への取り付けに手間と時間がかり、しかも走行レールに固定された支持棒のロンジへ固定は圧着であるために充分な強度を有しているとはいえないという問題があった。
また、走行レールを走行する移動台車に取り付けられた汎用の溶接ロボットは7軸で、移動台車の走行軸も含めると全体として8軸ということになり、溶接ロボットが不必要な軸を含んでいるため大型化し、重量も重く冗長なシステムとなっており、煩雑、高コストなものであるという問題もあった。
【0004】
本発明はかかる問題点を解決するためになされたもので、小型、軽量で工具なしで組立と分解が容易に行え、溶接対処箇所であるロンジへの取り付け等の段取り作業も簡単に行うことができ、段取り作業、溶接作業、片付け作業までを1人で可能とするロンジ突合継手自動溶接ロボットを得ることを目的とする。
【課題を解決するための手段】
【0005】
本発明に係るロンジ突合継手自動溶接ロボットは、突合継手部分を有するロンジのフェース間に着脱自在な走行レールと、該走行レール上を自走する走行駆動体とから構成された走行ユニットと、前記走行駆動体に着脱可能に立設され、昇降用ネジ軸を垂直に支持する昇降軸支持体と、該昇降軸支持体に上下方向に案内され、該昇降用ネジ軸に螺合して上下動する昇降駆動体とから構成された昇降ユニットと、前記昇降駆動体にマニプレータ部固定クランプにより取り付けられたマニプレータ支持体と、該マニプレータ支持体に取り付けられた前後軸部と、該前後軸部に前後方向に移動するよう取り付けられ、旋回、回転、捻りの回転3軸の機構を有するマニプレータとから構成されたマニプレータユニットと、前記マニプレータに着脱自在に取り付けられたトーチホルダに保持されてロンジ突合継手を自動溶接する溶接トーチとを備えて構成されている。
【発明の効果】
【0006】
本発明に係るロンジ突合継手自動溶接ロボットにおいては、突合継手部分を有するロンジのフェース間に着脱自在な走行レールと、該走行レール上を自走する走行駆動体とから構成された走行ユニットと、前記走行駆動体に着脱可能に立設され、昇降用ネジ軸を垂直に支持する昇降軸支持体と、該昇降軸支持体に上下方向に案内され、該昇降用ネジ軸に螺合して上下動する昇降駆動体とから構成された昇降ユニットと、前記昇降駆動体にマニプレータ部固定クランプにより取り付けられたマニプレータ支持体と、該マニプレータ支持体に取り付けられた前後軸部と、該前後軸部に前後方向に移動するよう取り付けられ、旋回、回転、捻りの回転3軸の機構を有するマニプレータとから構成されたマニプレータユニットと、前記マニプレータに着脱自在に取り付けられたトーチホルダに保持されてロンジ突合継手を自動溶接する溶接トーチとを備えて構成されているので、走行ユニットの走行軸、昇降ユニットの昇降軸及びマニプレータユニットの前後軸部の前後軸の直動3軸とマニプレータの回転3軸からなる6自由度で小型、軽量な構造であり、しかも走行ユニット、昇降ユニット及びマニプレータユニットは着脱自在に組み立てられるため、工具なしで組立と分解が容易に行え、溶接対処箇所であるロンジへの取り付け等の段取り作業も簡単に行うことができ、段取り作業、溶接作業、片付け作業までを1人で行うことができるという効果がある。
【発明を実施するための最良の形態】
【0007】
図1は本発明の実施の形態1に係るロンジ突合継手自動溶接ロボットのシステム全体を示す構成図、図2は同ロンジ突合継手自動溶接ロボットによる溶接対象部位を示す構成図、図3は同ロンジ突合継手自動溶接ロボットによる溶接対象部位のロンジ突合継手を示す斜視図、図4は同ロンジ突合継手自動溶接ロボットがロンジに装着された状態を示す正面図、図5は同ロンジ突合継手自動溶接ロボットがロンジに装着された状態を示す側面図、図6は同ロンジ突合継手自動溶接ロボットの組立と分解の状態を示す構成図、図7は同ロンジ突合継手自動溶接ロボットの走行レールがロンジフェースに装着された状態を示す正面図、図8は同ロンジ突合継手自動溶接ロボットの走行レールがロンジフェースに装着された状態を示す底面図、図9は同ロンジ突合継手自動溶接ロボットの走行レール同士の連結と分離の状態を示す構成図、図10は同ロンジ突合継手自動溶接ロボットの走行ユニットを示す正面図、図11は同ロンジ突合継手自動溶接ロボットの走行ユニットを示す平面図、図12は同ロンジ突合継手自動溶接ロボットの走行ユニットを示す側面断面図、図13は同ロンジ突合継手自動溶接ロボットの昇降軸支持体への昇降駆動体の取付状態を示す構成図、図14は同ロンジ突合継手自動溶接ロボットの昇降軸支持体への昇降駆動体の取付状態を示す側面図、図15は同ロンジ突合継手自動溶接ロボットの昇降軸支持体への昇降駆動体の取付状態を示す平面図、図16は同ロンジ突合継手自動溶接ロボットの前後軸部へのマニプレータの取付状態を示す側面図、図17は同ロンジ突合継手自動溶接ロボットの前後軸部の内部を示す構成図、図18は同ロンジ突合継手自動溶接ロボットの前後軸部へのマニプレータの取付状態を示断面図、図19は同ロンジ突合継手自動溶接ロボットのマニプレータとトーチホルダの装着と分離の状態を示す構成図、図20は同ロンジ突合継手自動溶接ロボットの直動3軸と回転3軸の動作方向を示す説明図である。
【0008】
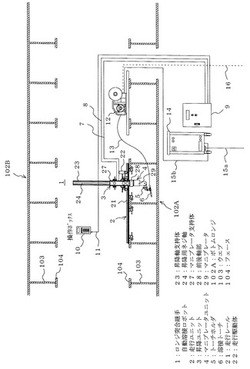
図1において、船底ダブルハル101のボトムロンジ102Aのフェース104に本発明の実施の形態1に係るロンジ突合継手自動溶接ロボット1が装着されている。
その突合継手自動溶接ロボット1は、ボトムロンジ102Aのフェース104に着脱自在に取り付けられた走行ユニット2と、走行ユニット1に着脱可能に立設された昇降ユニット3と、昇降ユニット3に昇降可能に取り付けられたマニプレータユニット4と、マニプレータユニット4に着脱自在に取り付けられたトーチホルダー5に保持された溶接トーチ6とを備えて大略構成されている。
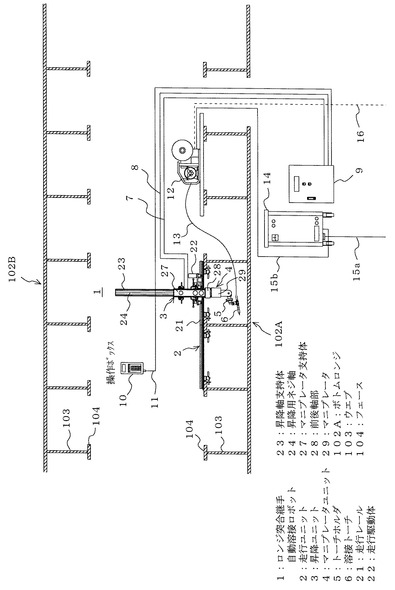
なお、本実施の形態1のロンジ突合継手自動溶接ロボット1は図2に示すインナボトムロンジ102Bや船側ダブルハル101のロンジにも装着することができる。
上記のボトムロンジ102A及びインナボトムロンジ102Bはいずれも船の前後方向に配置された部材、即ち縦通骨材を指し、ボトムロンジ102Aは船底縦通骨材と称され、インナボトムロンジ102Bは二重底縦通骨材と称されるるが、以下ボトムロンジ102A、インナボトムロンジ102Bの名称を用いて説明する。
【0009】
突合継手自動溶接ロボット1にはロボット動力ケーブル7及びロボット信号ケーブル8を介して制御盤9が接続されている。また、その制御盤9には運転の操作やデータの操作等を行う操作ボックス10がボックス信号線11を介して接続されており、操作ボックス10の操作によって走行ユニット2、昇降ユニット3、マニプレータユニット4の各駆動部分を駆動させて溶接トーチ6を移動させることによって溶接が行われる。
その溶接トーチ6には、別のフェース104に装着されたワイヤ送給装置12から繰り出されたトーチケーブル13が送給されるよう構成されている。そのワイヤ送給装置12には1次側電源ケーブル15aに接続の溶接電源14の2次側電源ケーブル15bが接続されていると共にCO2ガスホース16が接続されている。
【0010】
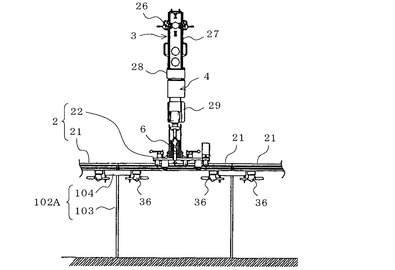
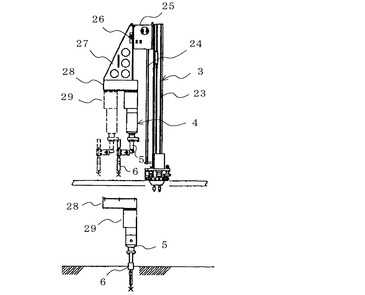
次に、本実施の形態1のロンジ突合継手自動溶接ロボット1の詳細な構成を図4〜図6に基づいて説明する。
ロンジ突合継手自動溶接ロボット1の走行ユニット2は、フェース104に着脱自在な走行レール21と、その走行レール21上を自走する走行駆動体22とから構成されている。
また、突合継手自動溶接ロボット1の昇降ユニット3は、 走行駆動体22に着脱可能に立設され、昇降用ネジ軸24を支持アーム23bで支持する昇降軸支持体23と、昇降軸支持体23に上下方向に案内され、昇降用ネジ軸24に螺合して上下動する昇降駆動体25とから構成されている。
昇降軸支持体23はアルミニウムで構成された矩形断面形状で軽量化のために中空部を有しており、その内部に強度確保のためのリブが形成されている。
さらに、突合継手自動溶接ロボット1のマニプレータユニット4は、昇降駆動体25に設けられたマニプレータ部固定クランプ26により取り付けられたマニプレータ支持体27と、マニプレータ支持体27に取り付けられた前後軸部28と、前後軸部28に取り付けられ、前後方向に移動するマニプレータ29とから構成されている。
【0011】
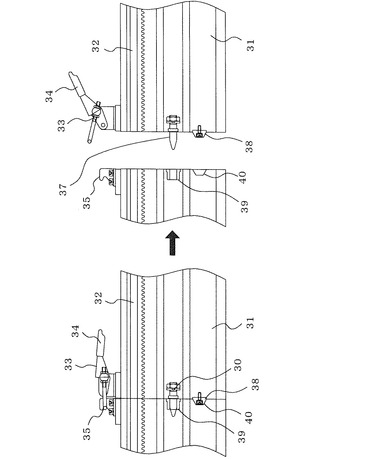
次に、走行ユニット2の走行レール21の構成を図7〜図9に基づいて説明する。
走行レール21は、ボトムロンジ102Aのフェース104間に橋渡しするように配置される長方形状で所定長さのレール本体31と、レール本体31の表面一側部に取り付けられたV溝付きラック32と、レール本体31の一側部一端に取り付けられたスナップ錠の一方として構成された操作レバー34を有する係止部33と、レール本体31の一側部他端に取り付けられたスナップ錠の他方として構成された被係止部35と、レール本体31の裏面両端にそれぞれ設けられたトグル機構のフェース固定クランプ36と、レール本体31の一端部端面に設けられた上下方向(レール本体31の厚さ方向)の目違い合わせを行う位置決めピン37及び前後方向(レール本体31の幅方向)の目違い合わせを行う位置決めキー38と、レール本体31の他端部端面に設けられた位置決めピン受穴39及び位置決めキー受け部40とから構成されている。
レール本体31はアルミニウムで構成された矩形断面形状で軽量化のために中空部を有しており、その内部に強度確保のためのリブが形成されている。
【0012】
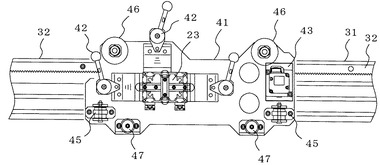
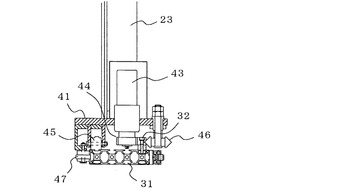
次に、走行ユニット2の走行駆動体22の構成を図10〜図12に基づいて説明する。
走行駆動体は22は、長方形の走行台41と、走行台41の表面に取り付けられた一対の支持体固定クリップ42と、走行台41の表面に取り付けられた駆動モータ43と、走行台41の裏面に設けられ、駆動モータ43によって回転駆動され、V溝付きラック32と歯合する駆動ピニオン44と、走行台41の裏面に設けられ、レール本体31の表面を走行する走行ローラ45と、走行台41の裏面に設けられ、V溝付きラック32を倣うガイドローラ46と、走行台41の裏面に設けられ、レール本体31の側面を倣う側面ローラ47とから構成されている。
そして、図12に示すように、ガイドローラ46がV溝付きラック32の外側を倣うため、走行レール3に対して走行駆動体22の幅方向のモーメント力を支えることができる。このとき、走行ローラ45も走行レール3の表面に当接して全体の荷重を支えている。また、V溝付きラック32の外側を倣うガイドローラ46と走行レール3の側面を倣う側面ローラ47とにより、走行駆動体22の直進性を確保している。
【0013】
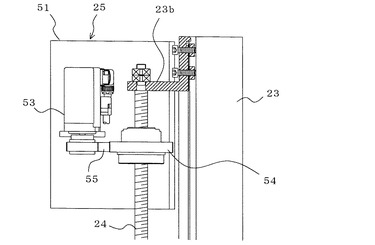
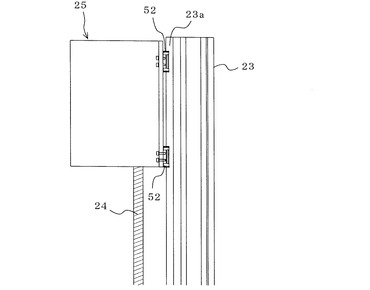
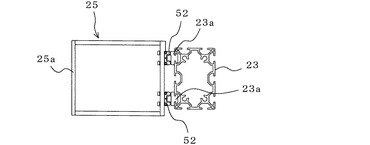
更に、昇降ユニット3の昇降軸支持体23に組み付けられる昇降駆動体25の構成を図13〜図15に基づいて説明する。
昇降駆動体25は、昇降駆動箱51と、昇降駆動箱51の側面に取り付けられ、駆動軸支持体23の昇降軸ガイドレール23aと嵌合される昇降軸ガイドブロック52と、昇降駆動箱51内に配置された昇降軸モータ53と、昇降駆動箱51内に配置され、昇降用ネジ軸24に螺合された昇降駆動ナット54、昇降軸モータ53の回転を昇降駆動ナット54に伝達する駆動ベルト55とで構成され、ナット駆動方式を採用している。
昇降駆動体25がナット駆動方式を採用した理由は、ロボットによる施工で生産性を確保するには、自動運転の高速化が必要とされることに鑑み、ボールネジ直動機構ではストロークが長くなった場合、ボールネジ駆動だと負荷イナーシャの増大やネジの振動などでナット駆動に比べて高速化に対して不利になる。そこで、ストロークが長くなっても負荷イナーシャや振動について問題のないナット駆動としている。
【0014】
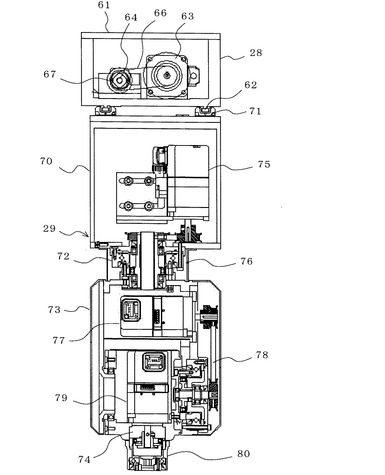
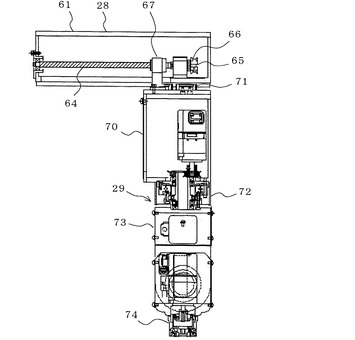
次に、昇降ユニット3の昇降駆動体25に取り付けられたマニプレータユニット4の構成を図16〜図18に基づいて説明する。
マニプレータユニット4のマニプレータ支持体27は昇降駆動体25にマニプレータ部固定クランプ26により取り付け固定されている。そのマニプレータ支持体27の下部に前後軸部28が固定されている。
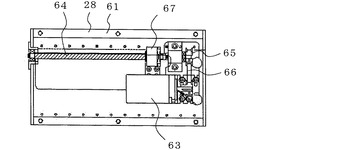
その前後軸部28は、前後軸箱61と、前後軸箱61の下面に取り付けられ、マニプレータ29の上面のマニプレータガイドブロック71と嵌合される前後軸ガイドレール62と、前後軸箱61内に配置された前後軸駆動モータ63と、前後軸箱61内に回転自在に設けられた前後軸駆動ボールネジ64と、前後軸64の一端に取り付けられた回転プーリ65と、前後軸モータ63の回転を回転プーリ65に伝達する駆動ベルト66と、前後軸駆動ボールネジ64に螺合し、下部でマニプレータ29と一体に連結されている前後軸駆動ナット67とで構成され、ボールネジ駆動方式を採用している。
前後軸部28がボールネジ駆動方式を採用した理由は、前後軸軸部28はストロークが短いため、構造がボールネジ駆動方式に比べ複雑となるナット駆動方式を避け、一般的に良く用いられているボールネジ駆動としている。
【0015】
前後軸部28の下部に前後方向に移動するマニプレータ29は、マニプレータベース70と、マニプレータベース70の上面に取り付けられたマニプレータガイドブロック71と、マニプレータベース70の下部に水平に旋回可能に取り付けられた旋回軸部72と、旋回軸部72に対して垂直に回転可能に取り付けられた回転軸部73と、回転軸部73に対して水平に回転可能に取り付けられた捻り軸部74とで構成されている。
マニプレータベース70内には旋回軸駆動モータ75が設けられ、旋回軸部72内には旋回軸減速機76が設けられ、回転軸部73内には回転軸駆動モータ77と回転軸減速機78と捻り軸駆動モータ79が設けられ、捻り軸部74内には捻り軸減速機80が設けられている。
【0016】
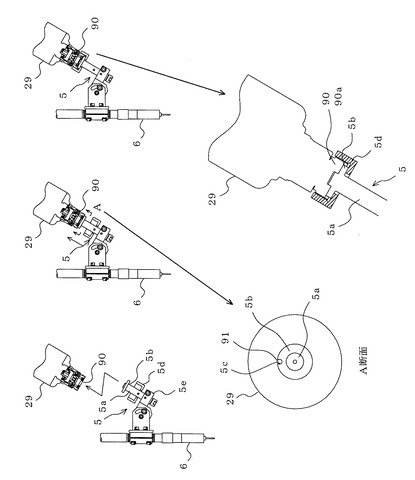
マニプレータ29の先端である捻り軸部74の先端フランジ90の外周には図19に示すようにタップ加工によりネジ溝91が刻設されており、先端フランジ90の端面には位置決めピン92が突設されている。
また、トーチホルダ5は棒状のトーチ本体5aと、トーチ本体5aの先端に設けられ、先端フランジ90の端面と当接するリング状のトーチブラケット5bと、トーチブラケット5bに設けられたピン穴5cと、トーチ本体5aに嵌め付けられ、先端フランジ90のネジ溝91と螺合する袋ナット5dと、トーチ本体5aの基端に設けられ、溶接トーチ6を保持する保持具5eとから構成されている。
【0017】
マニプレータ29の先端フランジ90へのトーチホルダ5の取り付けは、まず先端フランジ90の端面にトーチホルダ5のトーチブラケット5bを当接する。このとき、先端フランジ90の端面の位置決めピン92がトーチブラケット5bのピン穴5cに挿入されて位置決めされる。
従って、マニプレータ29の先端フランジ90にトーチホルダ5のトーチ本体5aが位置決めピン92とピン穴5cによって精度良く位置決めされることとなる。
次に、トーチ本体5aに嵌め付けられた袋ナット5dを先端フランジ90の外周のネジ溝91に螺合させることにより、トーチホルダ5が先端フランジ90に精度良く位置決めされた状態で螺着される。
そのトーチホルダ5のトーチ本体5aの基端に設けられた保持具5eにより溶接トーチ6が保持されている。
【0018】
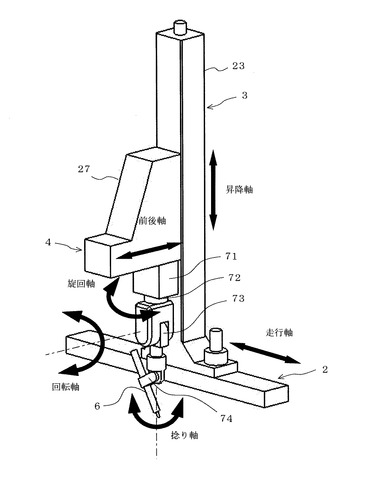
最後に、本実施の形態1のロンジ突合継手自動溶接ロボット1の各駆動軸の動作方向を図20に示す。
マニプレータ29は、図20に示すように旋回軸部72の旋回、回転軸部73の回転、捻り軸部74の回転3軸を有し、ロボット全体として走行ユニット2の走行軸、昇降ユニット3の昇降軸、前後軸部28の前後軸の直動3軸を有している。
従って、ロンジ突合継手自動溶接ロボット1は回転3軸と直動3軸の合計6軸の溶接ロボットとして構成されている。
【0019】
このようにロンジ突合継手自動溶接ロボット1は、矩形状のロンジスペースの突合継手に沿った動作に適した直交3自由度と、自在なトーチ姿勢を実現するのに必要な回転3自由度を組み合わせた6自由度ロボットで小型、軽量な構造であり、段取り作業が1人で可能なように、走行ユニット2、昇降ユニット3及びマニプレータユニット4の3つのユニットで構成されており、各ユニットがそれぞれ13Kg以下の重量となるように構成され、ロンジ突合継手と船底外板突合継手に最適な機構となっているている。
また、ロンジ突合継手自動溶接ロボット1の各駆動軸を駆動する駆動モータはいずれもオペレータが近傍で作業できるよう安全規則(80W規則)に抵触しない50W以下の駆動モータを採用している。
【0020】
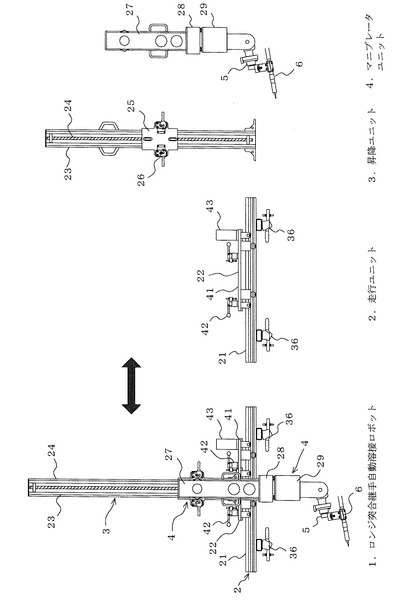
次に、本発明の実施の形態1に係るロンジ突合継手自動溶接ロボット1をボトムロンジ102Aのフェース104に設置し、突合継手自動溶接ロボット1によりロンジ突合継手に溶接を行うまでの過程を説明する。
(1)まず、走行ユニット2をボトムロンジ102Aのフェース104に装着する。
(2)次に、フェース104に装着した走行ユニット2に昇降ユニット3を立設状態に組み付ける。
(3)最後に、その昇降ユニット3にマニプレータユニット4を支持させることにより、ボトムロンジ102Aのフェース104にロンジ突合継手自動溶接ロボット1の組立が完成する。
(4)そのロンジ突合継手自動溶接ロボット1によりロンジ突合継手を溶接する。
(5)1つのロンジについて突合継手の溶接が完了したら、次のロンジである隣のロンジに溶接を行うために走行ユニット2の走行レール21をつなぐ。
(6)つないだ走行レール21上へ走行駆動体22を駆動してロンジ突合継手自動溶接ロボット1を移動させ、隣のロンジについて突合継手の溶接を行う。
(7)こうして前記(5)〜(6)の動作を繰り返して次々と隣り合うロンジについてロンジ突合継手を溶接していく。
【0021】
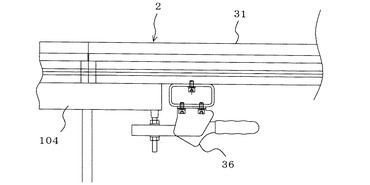
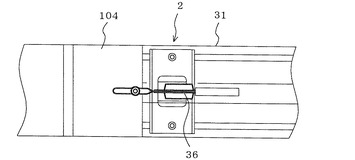
(1)走行ユニット2をボトムロンジ102Aのフェース104に装着する場合について説明する。
走行レール21には走行駆動体22が組み付けられて走行ユニット2が構成されているので、走行駆動体22と一体の走行レール21をボトムロンジ102Aのフェース104に一体的に組み付ける。
まず、走行レール21の両端を隣り合う2つのフェース104間に載置する。
次に、走行レール21の裏面の両端にそれぞれ取り付けられているトグル機構のフェース固定クランプ36の操作レバーを回動操作してクランプ部材をロンジフェース104の裏面に押圧させ、フェース固定クランプ36によりフェース104を挟み込むようにして走行レール21をフェース104に一体的に組み付ける。
この場合、トグル機構のフェース固定クランプ36を使用しているので、フェース104の走行レール21の取り付、取り外しは工具を用いずに行うことができる。
【0022】
(2)フェース104に装着した走行ユニット2に昇降ユニット3を立設状態に組み付ける場合について説明する。
まず、走行ユニット2の走行駆動体22の走行台41に昇降ユニット3の昇降軸支持体23を立設する。
次に、昇降軸支持体23の下部両端と一側にそれぞれ設けられている3つのL字状の固定アングル23cを走行台41に設けられている3つの支持体固定クランプ42でクランプすることにより、走行台41に昇降軸支持体23が固定状態に立設される。
なお、昇降支持体23には昇降駆動体25が組み付けられている。
【0023】
(3)昇降ユニット3にマニプレータユニット4を支持させる場合について説明する。
マニプレータ支持体27と前後軸部28とマニプレータ29とが組み付けられてマニプレータユニット4が構成されている。
そのマニプレータユニット4のマニプレータ支持体27を昇降ユニット3の昇降駆動体25にマニプレータ部固定クランプ26により固定することにより、昇降ユニット3にマニプレータユニット4が支持され、ボトムロンジ102Aのフェース104にロンジ突合継手自動溶接ロボット1の組立が完成する。
この場合、マニプレータ部固定クランプ26を使用しているので、昇降駆動体25へのマニプレータ支持体27の取り付け、取り外しは工具を用いずに行うことができる。
【0024】
(4)そのロンジ突合継手自動溶接ロボット1によりロンジ突合継手を溶接する。
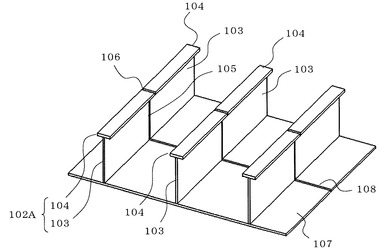
ロンジ突合継手自動溶接ロボット1は回転3軸と直動3軸の合計6軸の溶接ロボットであり、操作ボックス10を操作して制御盤9からの駆動信号によぅてこれらの軸を共働するよう動作制御することにより、図3に示すボトムロンジ102Aにおけるウエブ継手105、フェース継手106及び外板継手108のそれぞれについて溶接トーチ6により突合継手溶接を行う。
【0025】
(5)隣のロンジに溶接を行うために走行ユニット2の走行レール21の接続について説明する。
走行レール21同士の連結は、一方のレール本体31の一端の端面に取り付けられている位置決めピン37を他方のレール本体31の他端の端面に取り付けられている位置決めピン受け穴39に挿入させると共に、一方のレール本体31の一端の端面に取り付けられている位置決めキー38を他方のレール本体31の他端の端面に取り付けられている位置決めキー受部40に係合させると、一方のレール本体31の一端に他方のレール本体31の他端が連結される。
【0026】
こうして連結された一方のレール本体31の一端の側面に取り付けられているスナップ錠の一方の係止部33を操作レバー34を操作して他方のレール本体31の他端の側面に取り付けられているスナップ錠の他方の被係止部35に係止させることにより、連結された2つのレール本体31、即ち走行レール21は一体になる。
このとき、一方の走行レール21の位置決めピン37が他方の走行レール21の位置決めピン受け穴39に挿入されることによって上下方向(レール本体31の厚さ方向)の目違い合わせが行われ、一方の走行レール21の位置決めキー38が他方の走行レール21の位置決めキー受部40に係合されることによって前後方向(レール本体31の幅方向)の目違い合わせが行われて走行レール21同士が精度良く連結される。
この走行レール21同士の連結もスナップ錠を用いることによって確実に連結され、走行レール21同士の連結や連結の解除も工具を用いずに行うことができる。
(6)つないだ走行レール21上へ走行駆動体22を駆動してロンジ突合継手自動溶接ロボット1を移動させ、隣のロンジについて前記(4)で説明したのと同様にロンジ突合継手の溶接を行う。
【0027】
このように、本発明の実施の形態1のロンジ突合継手自動溶接ロボット1によれば、突合継手部分を有するボトムロンジ102Aのフェース104間に着脱自在な走行レール21と、該走行レール21上を自走する走行駆動体22とから構成された走行ユニット2と、走行ユニット2の走行駆動体22に着脱可能に立設され、昇降用ネジ軸24を垂直に支持する昇降軸支持体23と、昇降軸支持体23に上下方向に案内され、昇降用ネジ軸24に螺合して上下動する昇降駆動体25とから構成された昇降ユニット3と、昇降ユニット3の昇降駆動体25にマニプレータ部固定クランプ26により取り付けられたマニプレータ支持体27と、マニプレータ支持体27に取り付けられた前後軸部28と、前後軸部28に前後方向に移動するよう取り付けられ、旋回、回転、捻りの回転3軸の機構を有するマニプレータ29とから構成されたマニプレータユニット4と、マニプレータユニット4のマニプレータ29に着脱自在に取り付けられたトーチホルダ5に保持されてロンジ突合継手を自動溶接する溶接トーチ6とを備えて構成されているので、走行ユニット2の走行軸、昇降ユニット3の昇降軸及びマニプレータユニット4の前後軸部28の前後軸の直動3軸とマニプレータ29の回転3軸からなる6自由度で小型、軽量な構造であり、しかも走行ユニット2、昇降ユニット3及びマニプレータユニット4は着脱自在に組み立てられるため、工具なしで組立と分解が容易に行え、溶接対処箇所であるロンジへの取り付け等の段取り作業も簡単に行うことができ、段取り作業、溶接作業、片付け作業までを1人で行うことができる。
【0028】
上記実施の形態1では、走行レール21の長さはボトムロンジ102Aのフェース104間に載置される長さになっているが、走行レール21の長さをそれ以上としてもよいことはいうまでもない。
また、上記実施の形態1では、ロンジ突合継手自動溶接ロボット1を船底ダブルハル100のボトムロンジ102Aのフェース104に設置し、その溶接トーチ6が下向きになっているが、ロンジ突合継手自動溶接ロボット1をインナボトムロンジ102Bや、船側ダブルハル101のロンジにのフェースに設置し、ロンジ突合継手の自動溶接を施工することもできる。
さらに、上記実施の形態1では、走行レール21のレール本体31同士の接続のための位置決めとして位置決めピン37と位置決めピン受穴39や位置決めキー38と位置決めキー受部40を用いているが、これらと同様の位置決め機能を果たすことができるものであれば、異なる形状、配置、個数であってもよいことは勿論である。
更にまた、走行駆動体22の走行ローラ45、ガイドローラ46及び側面ローラ47の配置はこれらローラがそれぞれの機能を果たせば、自在にレイアウト可能である。
【図面の簡単な説明】
【0029】
【図1】本発明の実施の形態1に係るロンジ突合継手自動溶接ロボットのシステム全体を示す構成図。
【図2】同ロンジ突合継手自動溶接ロボットによる溶接対象部位を示す構成図。
【図3】同ロンジ突合継手自動溶接ロボットによる溶接対象部位のロンジ突合継手を示す斜視図。
【図4】同ロンジ突合継手自動溶接ロボットがロンジに装着された状態を示す正面図。
【図5】同ロンジ突合継手自動溶接ロボットがロンジに装着された状態を示す側面図。
【図6】同ロンジ突合継手自動溶接ロボットの組立と分解の状態を示す構成図。
【図7】同ロンジ突合継手自動溶接ロボットの走行レールがロンジフェースに装着された状態を示す正面図。
【図8】同ロンジ突合継手自動溶接ロボットの走行レールがロンジフェースに装着された状態を示す底面図。
【図9】同ロンジ突合継手自動溶接ロボットの走行レール同士の連結と分離の状態を示す構成図。
【図10】同ロンジ突合継手自動溶接ロボットの走行ユニットを示す正面図。
【図11】同ロンジ突合継手自動溶接ロボットの走行ユニットを示す平面図。
【図12】同ロンジ突合継手自動溶接ロボットの走行ユニットを示す側面断面図。
【図13】同ロンジ突合継手自動溶接ロボットの昇降軸支持体への昇降駆動体の取付状態を示す構成図。
【図14】同ロンジ突合継手自動溶接ロボットの昇降軸支持体への昇降駆動体の取付状態を示す側面図。
【図15】同ロンジ突合継手自動溶接ロボットの昇降軸支持体への昇降駆動体の取付状態を示す平面図。
【図16】同ロンジ突合継手自動溶接ロボットの前後軸部へのマニプレータの取付状態を示す側面図。
【図17】同ロンジ突合継手自動溶接ロボットの前後軸部の内部を示す構成図。
【図18】同ロンジ突合継手自動溶接ロボットの前後軸部へのマニプレータの取付状態を示断面図。
【図19】同ロンジ突合継手自動溶接ロボットのマニプレータとトーチホルダの装着と分離の状態を示す構成図。
【図20】同ロンジ突合継手自動溶接ロボットの直動3軸と回転3軸の動作方向を示す説明図。
【符号の説明】
【0030】
1 ロンジ突合継手自動溶接ロボット、2 走行ユニット、3 昇降ユニット、4マニプレータユニット、5 トーチホルダ、6 溶接トーチ、21 走行レール、22 走行駆動体、23 昇降軸支持体、24 昇降用ネジ軸、25 昇降駆動体、27 マニプレータ支持体、28 前後軸部、29 マニプレータ。
【技術分野】
【0001】
本発明はロンジ突合継手自動溶接ロボット、更に詳しくは橋梁、船舶ブロック等の鋼構造物のロンジ材及びロンジ材が取り付けられている主溝の突合継手を自動溶接するロンジ突合継手自動溶接ロボットに関するものである。
【背景技術】
【0002】
従来の自動溶接システムは、開口部を介して入出可能な閉空間内において溶接作業が必要な溶接対象箇所に自動溶接を施す自動溶接システムであって、該開口部を通じて該閉空間内に元困れ、該閉空間内で該溶接対象箇所に対応するように配置され着脱自在に取り付けられた走行レールと、該開口部を通じて該閉空間内に持ち込まれ、該走行レールを走行するように装備された移動台車及び該移動台車に取り付けられた溶接ロボットとを備え、該移動台車の該走行レールに沿った走行と該溶接ロボットの溶接アームの移動動作とを行いながら、該溶接対象箇所を自動溶接するようにしたものである(例えば、特許文献1参照)。
【特許文献1】特開平11−333592号公報(第1頁、図1)
【発明の開示】
【発明が解決しようとする課題】
【0003】
従来の自動溶接システムにおいては、溶接ロボットが取り付けられた移動台車が走行する走行レールの溶接対象箇所への取り付けに複数の支持棒を用いており、その支持棒は走行レールの支持部材に蝶ネジ等により固定され、走行レールの上下方向に突設されており、上下の各支持棒の先端がそれぞれ上部ロンジの下縁、下部ロンジの上縁に圧着して、突っ張り状態で走行レールを固定するようになっており、複数の支持棒を必要とする分だけコストがかかると共に走行レールの溶接対象箇所への取り付けに手間と時間がかり、しかも走行レールに固定された支持棒のロンジへ固定は圧着であるために充分な強度を有しているとはいえないという問題があった。
また、走行レールを走行する移動台車に取り付けられた汎用の溶接ロボットは7軸で、移動台車の走行軸も含めると全体として8軸ということになり、溶接ロボットが不必要な軸を含んでいるため大型化し、重量も重く冗長なシステムとなっており、煩雑、高コストなものであるという問題もあった。
【0004】
本発明はかかる問題点を解決するためになされたもので、小型、軽量で工具なしで組立と分解が容易に行え、溶接対処箇所であるロンジへの取り付け等の段取り作業も簡単に行うことができ、段取り作業、溶接作業、片付け作業までを1人で可能とするロンジ突合継手自動溶接ロボットを得ることを目的とする。
【課題を解決するための手段】
【0005】
本発明に係るロンジ突合継手自動溶接ロボットは、突合継手部分を有するロンジのフェース間に着脱自在な走行レールと、該走行レール上を自走する走行駆動体とから構成された走行ユニットと、前記走行駆動体に着脱可能に立設され、昇降用ネジ軸を垂直に支持する昇降軸支持体と、該昇降軸支持体に上下方向に案内され、該昇降用ネジ軸に螺合して上下動する昇降駆動体とから構成された昇降ユニットと、前記昇降駆動体にマニプレータ部固定クランプにより取り付けられたマニプレータ支持体と、該マニプレータ支持体に取り付けられた前後軸部と、該前後軸部に前後方向に移動するよう取り付けられ、旋回、回転、捻りの回転3軸の機構を有するマニプレータとから構成されたマニプレータユニットと、前記マニプレータに着脱自在に取り付けられたトーチホルダに保持されてロンジ突合継手を自動溶接する溶接トーチとを備えて構成されている。
【発明の効果】
【0006】
本発明に係るロンジ突合継手自動溶接ロボットにおいては、突合継手部分を有するロンジのフェース間に着脱自在な走行レールと、該走行レール上を自走する走行駆動体とから構成された走行ユニットと、前記走行駆動体に着脱可能に立設され、昇降用ネジ軸を垂直に支持する昇降軸支持体と、該昇降軸支持体に上下方向に案内され、該昇降用ネジ軸に螺合して上下動する昇降駆動体とから構成された昇降ユニットと、前記昇降駆動体にマニプレータ部固定クランプにより取り付けられたマニプレータ支持体と、該マニプレータ支持体に取り付けられた前後軸部と、該前後軸部に前後方向に移動するよう取り付けられ、旋回、回転、捻りの回転3軸の機構を有するマニプレータとから構成されたマニプレータユニットと、前記マニプレータに着脱自在に取り付けられたトーチホルダに保持されてロンジ突合継手を自動溶接する溶接トーチとを備えて構成されているので、走行ユニットの走行軸、昇降ユニットの昇降軸及びマニプレータユニットの前後軸部の前後軸の直動3軸とマニプレータの回転3軸からなる6自由度で小型、軽量な構造であり、しかも走行ユニット、昇降ユニット及びマニプレータユニットは着脱自在に組み立てられるため、工具なしで組立と分解が容易に行え、溶接対処箇所であるロンジへの取り付け等の段取り作業も簡単に行うことができ、段取り作業、溶接作業、片付け作業までを1人で行うことができるという効果がある。
【発明を実施するための最良の形態】
【0007】
図1は本発明の実施の形態1に係るロンジ突合継手自動溶接ロボットのシステム全体を示す構成図、図2は同ロンジ突合継手自動溶接ロボットによる溶接対象部位を示す構成図、図3は同ロンジ突合継手自動溶接ロボットによる溶接対象部位のロンジ突合継手を示す斜視図、図4は同ロンジ突合継手自動溶接ロボットがロンジに装着された状態を示す正面図、図5は同ロンジ突合継手自動溶接ロボットがロンジに装着された状態を示す側面図、図6は同ロンジ突合継手自動溶接ロボットの組立と分解の状態を示す構成図、図7は同ロンジ突合継手自動溶接ロボットの走行レールがロンジフェースに装着された状態を示す正面図、図8は同ロンジ突合継手自動溶接ロボットの走行レールがロンジフェースに装着された状態を示す底面図、図9は同ロンジ突合継手自動溶接ロボットの走行レール同士の連結と分離の状態を示す構成図、図10は同ロンジ突合継手自動溶接ロボットの走行ユニットを示す正面図、図11は同ロンジ突合継手自動溶接ロボットの走行ユニットを示す平面図、図12は同ロンジ突合継手自動溶接ロボットの走行ユニットを示す側面断面図、図13は同ロンジ突合継手自動溶接ロボットの昇降軸支持体への昇降駆動体の取付状態を示す構成図、図14は同ロンジ突合継手自動溶接ロボットの昇降軸支持体への昇降駆動体の取付状態を示す側面図、図15は同ロンジ突合継手自動溶接ロボットの昇降軸支持体への昇降駆動体の取付状態を示す平面図、図16は同ロンジ突合継手自動溶接ロボットの前後軸部へのマニプレータの取付状態を示す側面図、図17は同ロンジ突合継手自動溶接ロボットの前後軸部の内部を示す構成図、図18は同ロンジ突合継手自動溶接ロボットの前後軸部へのマニプレータの取付状態を示断面図、図19は同ロンジ突合継手自動溶接ロボットのマニプレータとトーチホルダの装着と分離の状態を示す構成図、図20は同ロンジ突合継手自動溶接ロボットの直動3軸と回転3軸の動作方向を示す説明図である。
【0008】
図1において、船底ダブルハル101のボトムロンジ102Aのフェース104に本発明の実施の形態1に係るロンジ突合継手自動溶接ロボット1が装着されている。
その突合継手自動溶接ロボット1は、ボトムロンジ102Aのフェース104に着脱自在に取り付けられた走行ユニット2と、走行ユニット1に着脱可能に立設された昇降ユニット3と、昇降ユニット3に昇降可能に取り付けられたマニプレータユニット4と、マニプレータユニット4に着脱自在に取り付けられたトーチホルダー5に保持された溶接トーチ6とを備えて大略構成されている。
なお、本実施の形態1のロンジ突合継手自動溶接ロボット1は図2に示すインナボトムロンジ102Bや船側ダブルハル101のロンジにも装着することができる。
上記のボトムロンジ102A及びインナボトムロンジ102Bはいずれも船の前後方向に配置された部材、即ち縦通骨材を指し、ボトムロンジ102Aは船底縦通骨材と称され、インナボトムロンジ102Bは二重底縦通骨材と称されるるが、以下ボトムロンジ102A、インナボトムロンジ102Bの名称を用いて説明する。
【0009】
突合継手自動溶接ロボット1にはロボット動力ケーブル7及びロボット信号ケーブル8を介して制御盤9が接続されている。また、その制御盤9には運転の操作やデータの操作等を行う操作ボックス10がボックス信号線11を介して接続されており、操作ボックス10の操作によって走行ユニット2、昇降ユニット3、マニプレータユニット4の各駆動部分を駆動させて溶接トーチ6を移動させることによって溶接が行われる。
その溶接トーチ6には、別のフェース104に装着されたワイヤ送給装置12から繰り出されたトーチケーブル13が送給されるよう構成されている。そのワイヤ送給装置12には1次側電源ケーブル15aに接続の溶接電源14の2次側電源ケーブル15bが接続されていると共にCO2ガスホース16が接続されている。
【0010】
次に、本実施の形態1のロンジ突合継手自動溶接ロボット1の詳細な構成を図4〜図6に基づいて説明する。
ロンジ突合継手自動溶接ロボット1の走行ユニット2は、フェース104に着脱自在な走行レール21と、その走行レール21上を自走する走行駆動体22とから構成されている。
また、突合継手自動溶接ロボット1の昇降ユニット3は、 走行駆動体22に着脱可能に立設され、昇降用ネジ軸24を支持アーム23bで支持する昇降軸支持体23と、昇降軸支持体23に上下方向に案内され、昇降用ネジ軸24に螺合して上下動する昇降駆動体25とから構成されている。
昇降軸支持体23はアルミニウムで構成された矩形断面形状で軽量化のために中空部を有しており、その内部に強度確保のためのリブが形成されている。
さらに、突合継手自動溶接ロボット1のマニプレータユニット4は、昇降駆動体25に設けられたマニプレータ部固定クランプ26により取り付けられたマニプレータ支持体27と、マニプレータ支持体27に取り付けられた前後軸部28と、前後軸部28に取り付けられ、前後方向に移動するマニプレータ29とから構成されている。
【0011】
次に、走行ユニット2の走行レール21の構成を図7〜図9に基づいて説明する。
走行レール21は、ボトムロンジ102Aのフェース104間に橋渡しするように配置される長方形状で所定長さのレール本体31と、レール本体31の表面一側部に取り付けられたV溝付きラック32と、レール本体31の一側部一端に取り付けられたスナップ錠の一方として構成された操作レバー34を有する係止部33と、レール本体31の一側部他端に取り付けられたスナップ錠の他方として構成された被係止部35と、レール本体31の裏面両端にそれぞれ設けられたトグル機構のフェース固定クランプ36と、レール本体31の一端部端面に設けられた上下方向(レール本体31の厚さ方向)の目違い合わせを行う位置決めピン37及び前後方向(レール本体31の幅方向)の目違い合わせを行う位置決めキー38と、レール本体31の他端部端面に設けられた位置決めピン受穴39及び位置決めキー受け部40とから構成されている。
レール本体31はアルミニウムで構成された矩形断面形状で軽量化のために中空部を有しており、その内部に強度確保のためのリブが形成されている。
【0012】
次に、走行ユニット2の走行駆動体22の構成を図10〜図12に基づいて説明する。
走行駆動体は22は、長方形の走行台41と、走行台41の表面に取り付けられた一対の支持体固定クリップ42と、走行台41の表面に取り付けられた駆動モータ43と、走行台41の裏面に設けられ、駆動モータ43によって回転駆動され、V溝付きラック32と歯合する駆動ピニオン44と、走行台41の裏面に設けられ、レール本体31の表面を走行する走行ローラ45と、走行台41の裏面に設けられ、V溝付きラック32を倣うガイドローラ46と、走行台41の裏面に設けられ、レール本体31の側面を倣う側面ローラ47とから構成されている。
そして、図12に示すように、ガイドローラ46がV溝付きラック32の外側を倣うため、走行レール3に対して走行駆動体22の幅方向のモーメント力を支えることができる。このとき、走行ローラ45も走行レール3の表面に当接して全体の荷重を支えている。また、V溝付きラック32の外側を倣うガイドローラ46と走行レール3の側面を倣う側面ローラ47とにより、走行駆動体22の直進性を確保している。
【0013】
更に、昇降ユニット3の昇降軸支持体23に組み付けられる昇降駆動体25の構成を図13〜図15に基づいて説明する。
昇降駆動体25は、昇降駆動箱51と、昇降駆動箱51の側面に取り付けられ、駆動軸支持体23の昇降軸ガイドレール23aと嵌合される昇降軸ガイドブロック52と、昇降駆動箱51内に配置された昇降軸モータ53と、昇降駆動箱51内に配置され、昇降用ネジ軸24に螺合された昇降駆動ナット54、昇降軸モータ53の回転を昇降駆動ナット54に伝達する駆動ベルト55とで構成され、ナット駆動方式を採用している。
昇降駆動体25がナット駆動方式を採用した理由は、ロボットによる施工で生産性を確保するには、自動運転の高速化が必要とされることに鑑み、ボールネジ直動機構ではストロークが長くなった場合、ボールネジ駆動だと負荷イナーシャの増大やネジの振動などでナット駆動に比べて高速化に対して不利になる。そこで、ストロークが長くなっても負荷イナーシャや振動について問題のないナット駆動としている。
【0014】
次に、昇降ユニット3の昇降駆動体25に取り付けられたマニプレータユニット4の構成を図16〜図18に基づいて説明する。
マニプレータユニット4のマニプレータ支持体27は昇降駆動体25にマニプレータ部固定クランプ26により取り付け固定されている。そのマニプレータ支持体27の下部に前後軸部28が固定されている。
その前後軸部28は、前後軸箱61と、前後軸箱61の下面に取り付けられ、マニプレータ29の上面のマニプレータガイドブロック71と嵌合される前後軸ガイドレール62と、前後軸箱61内に配置された前後軸駆動モータ63と、前後軸箱61内に回転自在に設けられた前後軸駆動ボールネジ64と、前後軸64の一端に取り付けられた回転プーリ65と、前後軸モータ63の回転を回転プーリ65に伝達する駆動ベルト66と、前後軸駆動ボールネジ64に螺合し、下部でマニプレータ29と一体に連結されている前後軸駆動ナット67とで構成され、ボールネジ駆動方式を採用している。
前後軸部28がボールネジ駆動方式を採用した理由は、前後軸軸部28はストロークが短いため、構造がボールネジ駆動方式に比べ複雑となるナット駆動方式を避け、一般的に良く用いられているボールネジ駆動としている。
【0015】
前後軸部28の下部に前後方向に移動するマニプレータ29は、マニプレータベース70と、マニプレータベース70の上面に取り付けられたマニプレータガイドブロック71と、マニプレータベース70の下部に水平に旋回可能に取り付けられた旋回軸部72と、旋回軸部72に対して垂直に回転可能に取り付けられた回転軸部73と、回転軸部73に対して水平に回転可能に取り付けられた捻り軸部74とで構成されている。
マニプレータベース70内には旋回軸駆動モータ75が設けられ、旋回軸部72内には旋回軸減速機76が設けられ、回転軸部73内には回転軸駆動モータ77と回転軸減速機78と捻り軸駆動モータ79が設けられ、捻り軸部74内には捻り軸減速機80が設けられている。
【0016】
マニプレータ29の先端である捻り軸部74の先端フランジ90の外周には図19に示すようにタップ加工によりネジ溝91が刻設されており、先端フランジ90の端面には位置決めピン92が突設されている。
また、トーチホルダ5は棒状のトーチ本体5aと、トーチ本体5aの先端に設けられ、先端フランジ90の端面と当接するリング状のトーチブラケット5bと、トーチブラケット5bに設けられたピン穴5cと、トーチ本体5aに嵌め付けられ、先端フランジ90のネジ溝91と螺合する袋ナット5dと、トーチ本体5aの基端に設けられ、溶接トーチ6を保持する保持具5eとから構成されている。
【0017】
マニプレータ29の先端フランジ90へのトーチホルダ5の取り付けは、まず先端フランジ90の端面にトーチホルダ5のトーチブラケット5bを当接する。このとき、先端フランジ90の端面の位置決めピン92がトーチブラケット5bのピン穴5cに挿入されて位置決めされる。
従って、マニプレータ29の先端フランジ90にトーチホルダ5のトーチ本体5aが位置決めピン92とピン穴5cによって精度良く位置決めされることとなる。
次に、トーチ本体5aに嵌め付けられた袋ナット5dを先端フランジ90の外周のネジ溝91に螺合させることにより、トーチホルダ5が先端フランジ90に精度良く位置決めされた状態で螺着される。
そのトーチホルダ5のトーチ本体5aの基端に設けられた保持具5eにより溶接トーチ6が保持されている。
【0018】
最後に、本実施の形態1のロンジ突合継手自動溶接ロボット1の各駆動軸の動作方向を図20に示す。
マニプレータ29は、図20に示すように旋回軸部72の旋回、回転軸部73の回転、捻り軸部74の回転3軸を有し、ロボット全体として走行ユニット2の走行軸、昇降ユニット3の昇降軸、前後軸部28の前後軸の直動3軸を有している。
従って、ロンジ突合継手自動溶接ロボット1は回転3軸と直動3軸の合計6軸の溶接ロボットとして構成されている。
【0019】
このようにロンジ突合継手自動溶接ロボット1は、矩形状のロンジスペースの突合継手に沿った動作に適した直交3自由度と、自在なトーチ姿勢を実現するのに必要な回転3自由度を組み合わせた6自由度ロボットで小型、軽量な構造であり、段取り作業が1人で可能なように、走行ユニット2、昇降ユニット3及びマニプレータユニット4の3つのユニットで構成されており、各ユニットがそれぞれ13Kg以下の重量となるように構成され、ロンジ突合継手と船底外板突合継手に最適な機構となっているている。
また、ロンジ突合継手自動溶接ロボット1の各駆動軸を駆動する駆動モータはいずれもオペレータが近傍で作業できるよう安全規則(80W規則)に抵触しない50W以下の駆動モータを採用している。
【0020】
次に、本発明の実施の形態1に係るロンジ突合継手自動溶接ロボット1をボトムロンジ102Aのフェース104に設置し、突合継手自動溶接ロボット1によりロンジ突合継手に溶接を行うまでの過程を説明する。
(1)まず、走行ユニット2をボトムロンジ102Aのフェース104に装着する。
(2)次に、フェース104に装着した走行ユニット2に昇降ユニット3を立設状態に組み付ける。
(3)最後に、その昇降ユニット3にマニプレータユニット4を支持させることにより、ボトムロンジ102Aのフェース104にロンジ突合継手自動溶接ロボット1の組立が完成する。
(4)そのロンジ突合継手自動溶接ロボット1によりロンジ突合継手を溶接する。
(5)1つのロンジについて突合継手の溶接が完了したら、次のロンジである隣のロンジに溶接を行うために走行ユニット2の走行レール21をつなぐ。
(6)つないだ走行レール21上へ走行駆動体22を駆動してロンジ突合継手自動溶接ロボット1を移動させ、隣のロンジについて突合継手の溶接を行う。
(7)こうして前記(5)〜(6)の動作を繰り返して次々と隣り合うロンジについてロンジ突合継手を溶接していく。
【0021】
(1)走行ユニット2をボトムロンジ102Aのフェース104に装着する場合について説明する。
走行レール21には走行駆動体22が組み付けられて走行ユニット2が構成されているので、走行駆動体22と一体の走行レール21をボトムロンジ102Aのフェース104に一体的に組み付ける。
まず、走行レール21の両端を隣り合う2つのフェース104間に載置する。
次に、走行レール21の裏面の両端にそれぞれ取り付けられているトグル機構のフェース固定クランプ36の操作レバーを回動操作してクランプ部材をロンジフェース104の裏面に押圧させ、フェース固定クランプ36によりフェース104を挟み込むようにして走行レール21をフェース104に一体的に組み付ける。
この場合、トグル機構のフェース固定クランプ36を使用しているので、フェース104の走行レール21の取り付、取り外しは工具を用いずに行うことができる。
【0022】
(2)フェース104に装着した走行ユニット2に昇降ユニット3を立設状態に組み付ける場合について説明する。
まず、走行ユニット2の走行駆動体22の走行台41に昇降ユニット3の昇降軸支持体23を立設する。
次に、昇降軸支持体23の下部両端と一側にそれぞれ設けられている3つのL字状の固定アングル23cを走行台41に設けられている3つの支持体固定クランプ42でクランプすることにより、走行台41に昇降軸支持体23が固定状態に立設される。
なお、昇降支持体23には昇降駆動体25が組み付けられている。
【0023】
(3)昇降ユニット3にマニプレータユニット4を支持させる場合について説明する。
マニプレータ支持体27と前後軸部28とマニプレータ29とが組み付けられてマニプレータユニット4が構成されている。
そのマニプレータユニット4のマニプレータ支持体27を昇降ユニット3の昇降駆動体25にマニプレータ部固定クランプ26により固定することにより、昇降ユニット3にマニプレータユニット4が支持され、ボトムロンジ102Aのフェース104にロンジ突合継手自動溶接ロボット1の組立が完成する。
この場合、マニプレータ部固定クランプ26を使用しているので、昇降駆動体25へのマニプレータ支持体27の取り付け、取り外しは工具を用いずに行うことができる。
【0024】
(4)そのロンジ突合継手自動溶接ロボット1によりロンジ突合継手を溶接する。
ロンジ突合継手自動溶接ロボット1は回転3軸と直動3軸の合計6軸の溶接ロボットであり、操作ボックス10を操作して制御盤9からの駆動信号によぅてこれらの軸を共働するよう動作制御することにより、図3に示すボトムロンジ102Aにおけるウエブ継手105、フェース継手106及び外板継手108のそれぞれについて溶接トーチ6により突合継手溶接を行う。
【0025】
(5)隣のロンジに溶接を行うために走行ユニット2の走行レール21の接続について説明する。
走行レール21同士の連結は、一方のレール本体31の一端の端面に取り付けられている位置決めピン37を他方のレール本体31の他端の端面に取り付けられている位置決めピン受け穴39に挿入させると共に、一方のレール本体31の一端の端面に取り付けられている位置決めキー38を他方のレール本体31の他端の端面に取り付けられている位置決めキー受部40に係合させると、一方のレール本体31の一端に他方のレール本体31の他端が連結される。
【0026】
こうして連結された一方のレール本体31の一端の側面に取り付けられているスナップ錠の一方の係止部33を操作レバー34を操作して他方のレール本体31の他端の側面に取り付けられているスナップ錠の他方の被係止部35に係止させることにより、連結された2つのレール本体31、即ち走行レール21は一体になる。
このとき、一方の走行レール21の位置決めピン37が他方の走行レール21の位置決めピン受け穴39に挿入されることによって上下方向(レール本体31の厚さ方向)の目違い合わせが行われ、一方の走行レール21の位置決めキー38が他方の走行レール21の位置決めキー受部40に係合されることによって前後方向(レール本体31の幅方向)の目違い合わせが行われて走行レール21同士が精度良く連結される。
この走行レール21同士の連結もスナップ錠を用いることによって確実に連結され、走行レール21同士の連結や連結の解除も工具を用いずに行うことができる。
(6)つないだ走行レール21上へ走行駆動体22を駆動してロンジ突合継手自動溶接ロボット1を移動させ、隣のロンジについて前記(4)で説明したのと同様にロンジ突合継手の溶接を行う。
【0027】
このように、本発明の実施の形態1のロンジ突合継手自動溶接ロボット1によれば、突合継手部分を有するボトムロンジ102Aのフェース104間に着脱自在な走行レール21と、該走行レール21上を自走する走行駆動体22とから構成された走行ユニット2と、走行ユニット2の走行駆動体22に着脱可能に立設され、昇降用ネジ軸24を垂直に支持する昇降軸支持体23と、昇降軸支持体23に上下方向に案内され、昇降用ネジ軸24に螺合して上下動する昇降駆動体25とから構成された昇降ユニット3と、昇降ユニット3の昇降駆動体25にマニプレータ部固定クランプ26により取り付けられたマニプレータ支持体27と、マニプレータ支持体27に取り付けられた前後軸部28と、前後軸部28に前後方向に移動するよう取り付けられ、旋回、回転、捻りの回転3軸の機構を有するマニプレータ29とから構成されたマニプレータユニット4と、マニプレータユニット4のマニプレータ29に着脱自在に取り付けられたトーチホルダ5に保持されてロンジ突合継手を自動溶接する溶接トーチ6とを備えて構成されているので、走行ユニット2の走行軸、昇降ユニット3の昇降軸及びマニプレータユニット4の前後軸部28の前後軸の直動3軸とマニプレータ29の回転3軸からなる6自由度で小型、軽量な構造であり、しかも走行ユニット2、昇降ユニット3及びマニプレータユニット4は着脱自在に組み立てられるため、工具なしで組立と分解が容易に行え、溶接対処箇所であるロンジへの取り付け等の段取り作業も簡単に行うことができ、段取り作業、溶接作業、片付け作業までを1人で行うことができる。
【0028】
上記実施の形態1では、走行レール21の長さはボトムロンジ102Aのフェース104間に載置される長さになっているが、走行レール21の長さをそれ以上としてもよいことはいうまでもない。
また、上記実施の形態1では、ロンジ突合継手自動溶接ロボット1を船底ダブルハル100のボトムロンジ102Aのフェース104に設置し、その溶接トーチ6が下向きになっているが、ロンジ突合継手自動溶接ロボット1をインナボトムロンジ102Bや、船側ダブルハル101のロンジにのフェースに設置し、ロンジ突合継手の自動溶接を施工することもできる。
さらに、上記実施の形態1では、走行レール21のレール本体31同士の接続のための位置決めとして位置決めピン37と位置決めピン受穴39や位置決めキー38と位置決めキー受部40を用いているが、これらと同様の位置決め機能を果たすことができるものであれば、異なる形状、配置、個数であってもよいことは勿論である。
更にまた、走行駆動体22の走行ローラ45、ガイドローラ46及び側面ローラ47の配置はこれらローラがそれぞれの機能を果たせば、自在にレイアウト可能である。
【図面の簡単な説明】
【0029】
【図1】本発明の実施の形態1に係るロンジ突合継手自動溶接ロボットのシステム全体を示す構成図。
【図2】同ロンジ突合継手自動溶接ロボットによる溶接対象部位を示す構成図。
【図3】同ロンジ突合継手自動溶接ロボットによる溶接対象部位のロンジ突合継手を示す斜視図。
【図4】同ロンジ突合継手自動溶接ロボットがロンジに装着された状態を示す正面図。
【図5】同ロンジ突合継手自動溶接ロボットがロンジに装着された状態を示す側面図。
【図6】同ロンジ突合継手自動溶接ロボットの組立と分解の状態を示す構成図。
【図7】同ロンジ突合継手自動溶接ロボットの走行レールがロンジフェースに装着された状態を示す正面図。
【図8】同ロンジ突合継手自動溶接ロボットの走行レールがロンジフェースに装着された状態を示す底面図。
【図9】同ロンジ突合継手自動溶接ロボットの走行レール同士の連結と分離の状態を示す構成図。
【図10】同ロンジ突合継手自動溶接ロボットの走行ユニットを示す正面図。
【図11】同ロンジ突合継手自動溶接ロボットの走行ユニットを示す平面図。
【図12】同ロンジ突合継手自動溶接ロボットの走行ユニットを示す側面断面図。
【図13】同ロンジ突合継手自動溶接ロボットの昇降軸支持体への昇降駆動体の取付状態を示す構成図。
【図14】同ロンジ突合継手自動溶接ロボットの昇降軸支持体への昇降駆動体の取付状態を示す側面図。
【図15】同ロンジ突合継手自動溶接ロボットの昇降軸支持体への昇降駆動体の取付状態を示す平面図。
【図16】同ロンジ突合継手自動溶接ロボットの前後軸部へのマニプレータの取付状態を示す側面図。
【図17】同ロンジ突合継手自動溶接ロボットの前後軸部の内部を示す構成図。
【図18】同ロンジ突合継手自動溶接ロボットの前後軸部へのマニプレータの取付状態を示断面図。
【図19】同ロンジ突合継手自動溶接ロボットのマニプレータとトーチホルダの装着と分離の状態を示す構成図。
【図20】同ロンジ突合継手自動溶接ロボットの直動3軸と回転3軸の動作方向を示す説明図。
【符号の説明】
【0030】
1 ロンジ突合継手自動溶接ロボット、2 走行ユニット、3 昇降ユニット、4マニプレータユニット、5 トーチホルダ、6 溶接トーチ、21 走行レール、22 走行駆動体、23 昇降軸支持体、24 昇降用ネジ軸、25 昇降駆動体、27 マニプレータ支持体、28 前後軸部、29 マニプレータ。
【特許請求の範囲】
【請求項1】
突合継手部分を有するロンジのフェース間に着脱自在な走行レールと、該走行レール上を自走する走行駆動体とから構成された走行ユニットと、
前記走行駆動体に着脱可能に立設され、昇降用ネジ軸を垂直に支持する昇降軸支持体と、該昇降軸支持体に上下方向に案内され、該昇降用ネジ軸に螺合して上下動する昇降駆動体とから構成された昇降ユニットと、
前記昇降駆動体にマニプレータ部固定クランプにより取り付けられたマニプレータ支持体と、該マニプレータ支持体に取り付けられた前後軸部と、該前後軸部に前後方向に移動するよう取り付けられ、旋回、回転、捻りの回転3軸の機構を有するマニプレータとから構成されたマニプレータユニットと、
前記マニプレータに着脱自在に取り付けられたトーチホルダに保持されてロンジ突合継手を自動溶接する溶接トーチと
を備えたことを特徴とするロンジ突合継手自動溶接ロボット。
【請求項2】
前記走行レールは、
ロンジ間に橋渡しするようにに配置される所定長さのレール本体と、
該レール本体の表面一側部に取り付けられたV溝付きラックと、
該レール本体の一側部一端に取り付けられた操作レバーを有する係止部と、
該レール本体の一側部他端に取り付けられた被係止部と、
該レール本体の裏面両端にそれぞれ設けられたフェース固定クランプと、
該レール本体の一端部端面に設けられた少なくとも2つの位置決め部材と、
該レール本体の他端部端面に設けられ、前記2つの位置決め部材とそれぞれ嵌合する2つの位置決め受け部材と
から構成されていることを特徴とする請求項1記載のロンジ突合継手自動溶接ロボット。
【請求項3】
前記走行駆動体は、
走行台と、
該走行台の表面に取り付けられた少なくとも3つ支持体固定クリップと、
該走行台の表面に取り付けられた駆動モータと、
該走行台の裏面に設けられ、前記レール本体のV溝付きラックと歯合し前記駆動モータによって回転駆動される駆動ピニオンと、
該走行台の裏面に設けられ、前記レール本体の表面を走行する走行ローラと、
該走行台の裏面に設けられ、前記V溝付きラックを倣うガイドローラと、
該走行台の裏面に設けられ、前記レール本体の側面を倣う側面ローラと
から構成されていることを特徴とする請求項1記載のロンジ突合継手自動溶接ロボット。
【請求項4】
前記トーチホルダは前記マニプレータの先端に当接するトーチブラケットと、該トーチブラケットが前記マニプレータの先端に当接状態のときに前記マニプレータの先端外周に設けられたネジ溝と螺合する袋ナットとを有し、
前記マニプレータの先端は位置決め部材を有し、前記トーチブラケットは前記位置決め部材と嵌合する位置決め受け材を有していることを特徴とする請求項1記載のロンジ突合継手自動溶接ロボット。
【請求項1】
突合継手部分を有するロンジのフェース間に着脱自在な走行レールと、該走行レール上を自走する走行駆動体とから構成された走行ユニットと、
前記走行駆動体に着脱可能に立設され、昇降用ネジ軸を垂直に支持する昇降軸支持体と、該昇降軸支持体に上下方向に案内され、該昇降用ネジ軸に螺合して上下動する昇降駆動体とから構成された昇降ユニットと、
前記昇降駆動体にマニプレータ部固定クランプにより取り付けられたマニプレータ支持体と、該マニプレータ支持体に取り付けられた前後軸部と、該前後軸部に前後方向に移動するよう取り付けられ、旋回、回転、捻りの回転3軸の機構を有するマニプレータとから構成されたマニプレータユニットと、
前記マニプレータに着脱自在に取り付けられたトーチホルダに保持されてロンジ突合継手を自動溶接する溶接トーチと
を備えたことを特徴とするロンジ突合継手自動溶接ロボット。
【請求項2】
前記走行レールは、
ロンジ間に橋渡しするようにに配置される所定長さのレール本体と、
該レール本体の表面一側部に取り付けられたV溝付きラックと、
該レール本体の一側部一端に取り付けられた操作レバーを有する係止部と、
該レール本体の一側部他端に取り付けられた被係止部と、
該レール本体の裏面両端にそれぞれ設けられたフェース固定クランプと、
該レール本体の一端部端面に設けられた少なくとも2つの位置決め部材と、
該レール本体の他端部端面に設けられ、前記2つの位置決め部材とそれぞれ嵌合する2つの位置決め受け部材と
から構成されていることを特徴とする請求項1記載のロンジ突合継手自動溶接ロボット。
【請求項3】
前記走行駆動体は、
走行台と、
該走行台の表面に取り付けられた少なくとも3つ支持体固定クリップと、
該走行台の表面に取り付けられた駆動モータと、
該走行台の裏面に設けられ、前記レール本体のV溝付きラックと歯合し前記駆動モータによって回転駆動される駆動ピニオンと、
該走行台の裏面に設けられ、前記レール本体の表面を走行する走行ローラと、
該走行台の裏面に設けられ、前記V溝付きラックを倣うガイドローラと、
該走行台の裏面に設けられ、前記レール本体の側面を倣う側面ローラと
から構成されていることを特徴とする請求項1記載のロンジ突合継手自動溶接ロボット。
【請求項4】
前記トーチホルダは前記マニプレータの先端に当接するトーチブラケットと、該トーチブラケットが前記マニプレータの先端に当接状態のときに前記マニプレータの先端外周に設けられたネジ溝と螺合する袋ナットとを有し、
前記マニプレータの先端は位置決め部材を有し、前記トーチブラケットは前記位置決め部材と嵌合する位置決め受け材を有していることを特徴とする請求項1記載のロンジ突合継手自動溶接ロボット。
【図1】


【図2】

【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】

【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【公開番号】特開2008−279495(P2008−279495A)
【公開日】平成20年11月20日(2008.11.20)
【国際特許分類】
【出願番号】特願2007−128178(P2007−128178)
【出願日】平成19年5月14日(2007.5.14)
【出願人】(502116922)ユニバーサル造船株式会社 (172)
【公開日】平成20年11月20日(2008.11.20)
【国際特許分類】
【出願日】平成19年5月14日(2007.5.14)
【出願人】(502116922)ユニバーサル造船株式会社 (172)
[ Back to top ]