
ロータリセンサ
【課題】製造が容易で、検出感度を向上させたロータリセンサを提供する。
【解決手段】ロータリセンサ1のハウジング2は検知部3を収納して、二輪車の車体に取り付けられる。ロータ4は導電材料により形成され、ハウジング2に対して回転自在に設けられ、スタンド101の回転に伴ってスタンド101とともに回転する。このロータ4の一部で被検知部42が構成されている。検知部3は回路基板30を有し、回路基板30には平面コイルからなるコイル31が形成されている。コイル31は、回路基板30に実装された集積回路32によって高周波で駆動され、ロータ4の回転に伴い被検知部42との距離が変化することによって、そのコンダクタンスが変化する。集積回路32では、コイル31のコンダクタンスの変化から、スタンド101が起立位置にあるか、或いは、格納位置にあるかを検出する。
【解決手段】ロータリセンサ1のハウジング2は検知部3を収納して、二輪車の車体に取り付けられる。ロータ4は導電材料により形成され、ハウジング2に対して回転自在に設けられ、スタンド101の回転に伴ってスタンド101とともに回転する。このロータ4の一部で被検知部42が構成されている。検知部3は回路基板30を有し、回路基板30には平面コイルからなるコイル31が形成されている。コイル31は、回路基板30に実装された集積回路32によって高周波で駆動され、ロータ4の回転に伴い被検知部42との距離が変化することによって、そのコンダクタンスが変化する。集積回路32では、コイル31のコンダクタンスの変化から、スタンド101が起立位置にあるか、或いは、格納位置にあるかを検出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ロータリセンサに関するものである。
【背景技術】
【0002】
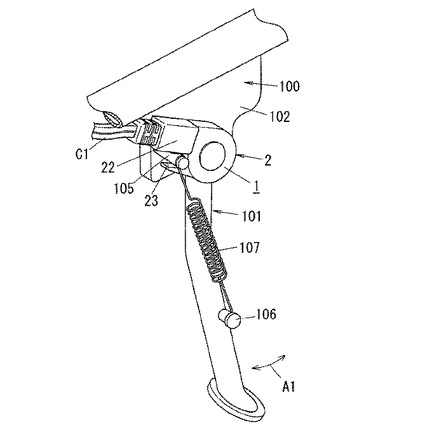
二輪車を駐車する際に車体を起立状態で保持するため、二輪車にはスタンドが設けられている。このスタンドが起立位置(駐車時の位置)にあるときにエンジンが始動していると、スタンドが格納されたときに急発進するため、スタンドが起立位置にある場合はエンジンが始動しないようにインターロック機能が設けられている。そのため、図5に示すように車体100とスタンド101との連結部位には、スタンド101が起立位置にあるか、格納位置(走行時の位置)にあるかを検知するためのロータリセンサ1が取り付けられている(例えば特許文献1参照)。
【0003】
スタンド101は、車体100のブラケット102に螺子止めされた第1ピボットボルト(図示せず)が挿通されることによって、車体100に対して矢印A1の方向に回転自在に取り付けられている。ブラケット102に設けられた棒状の突起105と、スタンド101の下側部に設けられた突起106には、それぞれ、コイルばね107の両端が係止され、コイルばね107のバネ力によって、スタンド101を格納した状態が保持される。
【0004】
上記特許文献に開示されたロータリセンサ1は、スタンド101とともに回転するロータ(図示せず)と、スタンド101の位置を検出する検出部(図示せず)と、この検出部を収納して車体100に固定されるハウジング2とを主要な構成として備えている。
【0005】
ロータには導電材料からなる被検出体が保持されており、ロータが回転することによって、ロータに保持された被検出体の位置が変位する。
【0006】
検出部は、コアが挿通されたボビンと、このボビンに巻回されたコイルと、コイルを高周波で駆動するとともに、スタンド101の回転によってコイルのコンダクタンスが変化することからスタンド101の位置を検出する検出回路を備えている。ここで、スタンド101が起立位置及び格納位置(走行時の位置)の何れか一方にある場合はコイルに被検知体が対向する位置にロータが回転し、起立位置及び格納位置の他方にある場合はコイルに被検知体が対向しない位置にロータが回転している。したがって、スタンド101の起立位置と格納位置とで導電材料からなる被検知体とコイルとの距離が変化し、それによってコイルの磁束が変化するので、コイルのコンダクタンスも変化する。検出回路では、コイルのコンダクタンスと所定の閾値との高低を比較しており、その比較結果からスタンド101が起立位置と格納位置の何れにあるかを検出している。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2010−228565号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
ところで、被検知体が接近するか、或いは、遠ざかることによって、大きな磁束変化が得られるのは、被検知体に近いコイルの先端部となる。上記特許文献に開示されたロータリセンサ1では、コイルと被検知体との間にボビンの鍔が存在するため、鍔の厚み分だけ被検知体とコイルとの間の隙間が大きくなり、それによってコンダクタンスの変化が小さくなり、検出感度が低下するという問題があった。
【0009】
また、ロータリセンサを製造するために、コアをボビンにインサート成形する工程や、ボビンにコイルを巻き付ける工程や、コイルを検出回路の基板に実装する工程が必要になり、製造工程が増えてしまうという問題もあった。
【0010】
本発明は上記課題に鑑みて為されたものであり、その目的とするところは、製造が容易で、検出感度を向上させたロータリセンサを提供することにある。
【課題を解決するための手段】
【0011】
本発明のロータリセンサは、二輪車の車体を起立状態で保持するスタンドが格納位置にあるか否かを検出するものである。このロータリセンサは、ハウジングと、ロータと、被検知体と、コイルと、検出回路とを備えている。ハウジングは車体に取り付けられている。ロータは、スタンドの回転に応じて回転する。被検知体は導電材料からなり、ハウジング又はロータの何れかに保持される。コイルは、基板に形成された平面コイルからなり、ロータの回転に伴って被検知体との距離が変化する。検出回路は、コイルのコンダクタンスからスタンドが格納位置にあるか否かを検出する。
【0012】
このロータリセンサにおいて、基板には、被検知体側の面と反対側の面に検知回路の回路部品が実装されることも好ましい。
【発明の効果】
【0013】
本発明によれば、製造が容易で、検出感度を向上させたロータリセンサを提供することができる。
【図面の簡単な説明】
【0014】
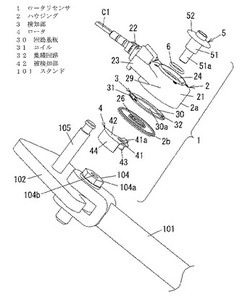
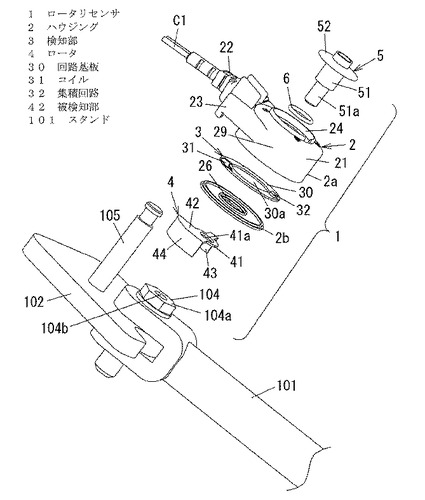
【図1】本実施形態のロータリセンサの分解斜視図である。
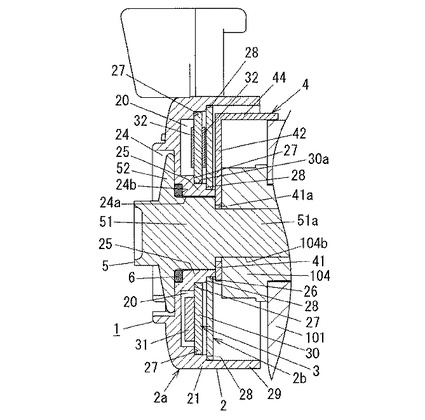
【図2】同上のロータリセンサの断面図である。
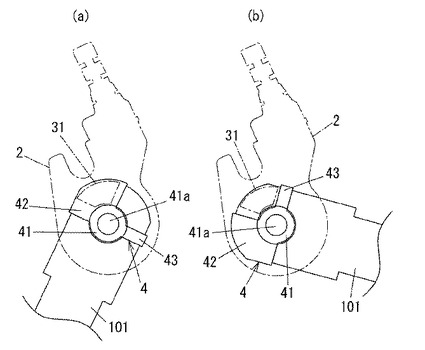
【図3】同上のロータリセンサを示し、(a)は起立位置でのコイルと(a)(b)は同上のロータリセンサの回転位置を説明する説明図である。
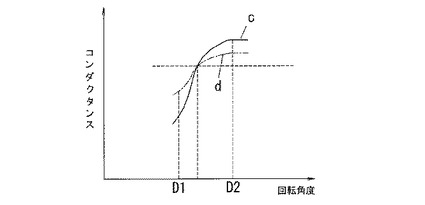
【図4】同上のロータリセンサの回転角度とコンダクタンスの関係を説明する図である。
【図5】ロータリセンサの使用状態を示す要部の斜視図である。
【発明を実施するための形態】
【0015】
本実施形態のロータリセンサについて図1〜図4を参照して説明する。
【0016】
図1はロータリセンサ1の分解斜視図、図2はロータリセンサ1の断面図であり、図5はロータリセンサ1の使用状態を説明する斜視図である。このロータリセンサ1は、二輪車の車体100に取り付けられ、例えば駐車時に車体100を起立状態に保持するスタンド101が起立状態にあるか、格納状態にあるかを検出するものである。尚、図2では、スタンド101が固定される車体100のブラケット102は図示が省略されている。また以下の説明では、左右方向は図2に示す向きを基準として説明する。すなわち二輪車のスタンド101に対してロータリセンサ1が取り付けられる方向を左右方向として説明を行うこととする。
【0017】
このロータリセンサ1は、検出部3と、検出部3を内部に収納するハウジング2と、ロータ4を主要な構成として備える。そして、ハウジング2及びロータ4は第2ピボットボルト5を用いて二輪車の車体100(具体的には第1ピボットボルト104)に取り付けられる。
【0018】
第2ピボットボルト5は段付きボルトからなり、軸部51の一端側は細径になっており、この細径部に螺子部51aが設けられている。また軸部51の他端側には、径方向に突出する円板状の頭部52が一体に設けられている。
【0019】
検出部3は、扁平な円環形状のプリント配線板からなる回路基板30を備えている。回路基板30は、厚み方向を左右方向(図2の左右方向)としてハウジング2の内部に収納されている。回路基板30の中央には孔30aが開口しており、この孔30aを挟んで対角の位置に、平面コイルからなるコイル31と、検出回路を構成する1チップの集積回路32が実装されている。ここで、回路基板30の表面及び裏面に、それぞれ、コイル状の導電パターンが形成されており、表面及び裏面の導電パターンをスルーホールなどで導通することによって、1つのコイル31が形成されている。また集積回路32は、回路基板30において、後述する被検知部42側の面(図2の右面)と反対側の面(図2の左面)に実装されている。この集積回路32によって、コイル31に高周波電流を流すとともに、コイル31のコンダクタンスと所定の閾値との高低を比較した結果からスタンド101が格納位置にあるか否かを検出する検出回路が構成されている。後で詳しく説明するが、ロータ4は導電材料からなり、ロータ4の一部で被検知部42が構成されており、スタンド101が起立位置にあるか格納位置にあるかによってロータ4の位置が変化し、それによって被検知部42とコイル31との距離が変化する。したがって、スタンド101の位置(起立位置又は格納位置)に応じてコイル31のコンダクタンスが変化することになり、検出回路では、コンダクタンスの変化からスタンド101が起立位置にあるか格納位置にあるかを検出して外部に出力する。尚、このような検出回路は周知技術で実現可能であるので、詳細な図示並びに説明は省略する。
【0020】
ハウジング2は、それぞれ絶縁性の合成樹脂により形成されたボディ2a及びカバー2bを結合して構成され、内部の収納空間20に上述した検出部3を収納する。
【0021】
ボディ2aは、全体として円筒形状であって、収納空間20が設けられた本体部21を備えている。本体部21の一端側(図2の右側)は略全体が開口し、他端側(図2の左側)を閉塞する底壁の外側面には凹部24が設けられている。凹部24は、第2ピボットボルト5の頭部52よりも直径の大きい丸穴状に凹んでおり、この凹部24の中心には、第2ピボットボルト5の軸部51が挿入される軸受け孔24aが設けられている(図2参照)。またボディ2aの底壁の内側面からは、第2ピボットボルト5の軸部51を囲む円筒形状であって、内周面が軸受け孔24aの内周面を構成するとともに、外周面が収納空間20の内面を構成する筒状凸部25が右方向(開口側)に突出する形で設けられている。
【0022】
また本体部21の外周面には、複数本の芯線からなる電線C1を収納空間20から外部に導出するための電線引き出し部22が径方向に突出するように設けられている。さらに本体部21の外周面には、径方向に突出する突起部23が電線引き出し部22との間に間隔を開けて設けられており、この突起部23と電線引き出し部22との間に突起105を挟むことでハウジング2の車体100に対する回転が規制されている。
【0023】
カバー2bは円板状に形成されており、カバー2bの中心には、筒状凸部25の先端が嵌る丸孔26が形成されている。
【0024】
ボディ2aの内部には、回路基板30が、集積回路32の実装面を底壁側(取付状態においてロータ4と反対側)に向け、中央の孔30aに筒状凸部25が通された状態で収納されている。尚、筒状凸部25の外周面と収納空間20の内側面とには、それぞれ、回路基板30の左面に当接する段部27が設けられており、回路基板30をボディ2aに対して例えば熱溶着することで、検出部3がボディ2aに固定される。
【0025】
回路基板30をボディ2aに収納した状態で、ボディ2aの開口からカバー2bがボディ2aの内部に挿入されると、ボディ2aとカバー2bの間に回路基板30(検出部3)が保持される。筒状凸部25の外周面と収納空間20の内側面とには、それぞれ、カバー2bの左面に当接する段部28が設けられており、段部28にカバー2bの左面が当接することによって、カバー2bがボディ2aに対し左右方向において位置決めされる。そして、ボディ2aとカバー2bの当接部位を例えばレーザ溶着によって溶着することで、ハウジング2内部の収納空間20が密閉されている。ここで、筒状凸部25の右端面はカバー2bの右面よりも右方に突出し、ロータ4に当接している。したがって、ロータ4は、その表面が筒状凸部25の右端面と摺動しながら回転することになり、車体100への取付時には、ハウジング2とロータ4との間の摩擦を低減するために、筒状凸部25の右端面にグリスが塗布されている。尚、回路基板30には、電線引き出し部22から外部に引き出される電線C1の一端が電気的に接続されており、集積回路32の電源は電線C1を介して供給されるとともに、集積回路32の出力は電線C1を介して外部に出力される。
【0026】
ロータ4は例えば金属板に打ち抜き加工と絞り加工とが施されてなり、厚さ方向を左右方向に向けた扁平な形状であって、第2ピボットボルト5の軸部51が挿通される円形状の挿通穴41aが貫設された本体部41を有している。このロータ4は、ハウジング2(ボディ2aに設けられた筒状凸部25)とスタンド101(第1ピボットボルト104)との間に挟まれることで、左右方向の変位が規制されている。ここで、ロータ4に設けられた挿通孔41aの内径は、第2ピボットボルト5の螺子部51aの外径より大きく、且つ、軸部51の大径部分の外径よりは小さくなっており、ロータ4は軸部51の大径部分と第1ピボットボルト104の間で挟まれることによっても、左右方向の変位が規制されていいる。
【0027】
また本体部41には、挿通穴41aの中心位置を中心とする扇形の被検知部42が一体に設けられている。さらに本体部41には、挿通孔41aから径方向に突出するとともに、その先端側が厚み方向の一端側(取付状態における車体100側)に突出するL形の腕部43が一体に設けられている。この腕部43は、扇形の被検知部42を構成する一方の弦に対して、挿通孔41aを挟んで反対側に設けられている。また被検知部42の外周縁からは、厚み方向の一端側(取付状態における車体100側)に突出する周壁44が被検知部42と一体に設けられている。このロータ4が第2ピボットボルト5を用いてハウジング2と共にスタンド101にねじ固定されると、腕部43及び周壁44がスタンド101の一端部を両側から挟み、これによってスタンド101に対するロータ4の回転が規制されることになる。したがって、スタンド101が図5のA1方向に回転すると、ロータ4はスタンド101と共に回転するから、ハウジング2に対してロータ4が相対的に回転することになる。
【0028】
ここで、図3(a)はスタンド101が起立位置に移動した状態、図3(b)はスタンド101が格納位置に移動した状態をそれぞれ示している。尚、スタンド101が起立位置にあるときのロータ4の回転角度をD1、スタンド101が格納位置にあるときのロータ4の回転角度をD2とする。
【0029】
図3の例では、起立状態においてロータ4の被検知部42がコイル31の右側に位置しており(対向しており)、格納状態においてはロータ4の被検知部42がコイル31の右側に位置していない(対向していない)。したがって、車体100に対するスタンド101の回転に伴って、ロータ4がハウジング2に対して回転することにより、主に被検知部42とコイル31との距離が変化するので、コイル31のコンダクタンスが変化する。
【0030】
このロータリセンサ1は以下のようにして車体100に取り付けられる。先ず作業者は第1ピボットボルト104の右側にロータ4とハウジング2を重ねて配置する。そして、作業者が、ハウジング2の軸受け孔24aとロータ4の挿通孔41aとに第2ピボットボルト5を通し、第1ピボットボルト104の頭部104aに設けたネジ穴104bにねじ込むことによって、ハウジング2とともにロータ4がスタンド101に螺子固定される。尚、第2ピボットボルトの軸部51には、例えば合成ゴムのような弾性を有する材料からなるOリング6が装着されている。
【0031】
以上のようにしてロータリセンサ1はスタンド101に取り付けられるのであるが、車体100に取り付けられた状態では、電線引き出し部22と突起部23の間に突起105が挟まれることで車体100に対するハウジング2の回転が規制されている。一方、ロータ4はハウジング2に対して回転自在に保持されており、スタンド101が起立位置と格納位置の間で回転すると、スタンド101と共にロータ4が回転し、それによってロータ4がハウジング2に対して相対的に回転するようになっている。ここで、被検知部42は略4分の1円に形成されており、被検知部42は、スタンド101が起立位置及び格納位置の何れか一方の位置にあるときのみコイル31の右側に位置する。したがって、スタンド101が他方の位置にあるときはコイル31の右側に被検知部42は位置しない。つまり、車体100に対するスタンド101の回転に伴ってロータ4がハウジング2に対して回転すると、主に被検知部42とコイル31との距離が変化することによって、コイル31のコンダクタンスが変化する。これにより、スタンド101が起立位置及び格納位置の何れか一方にある場合と他方にある場合とで集積回路32の出力が変化するから、スタンド101が何れの位置にあるかを検出することができる。
【0032】
ここで、第2ピボットボルト5の頭部52が挿入される凹部24の底面には、軸受け孔24aの開口縁に円環状の溝24bが形成され、この溝24bにOリング6が配置される。Oリング6の弾性変形していない状態での厚さ寸法は溝24bの深さ寸法よりも大きく、第2ピボットボルト5が締め付けられた状態ではOリング6は第2ピボットボルト5の頭部52と溝24bの底面とに挟まれて潰れるように弾性変形した状態となっている。すなわち、Oリング6の弾性力でハウジング2がロータ4に押し付けられることにより、ロータ4に対するハウジング2のがたつき(及びこれに伴う誤検出)が抑えられている。
【0033】
また、ボディ2aは、収納空間20の内周面を構成する円筒形状の囲み部29を有しており、この囲み部29は筒状凸部25の右端よりも、右方向に突出している。この囲み部29は、第2ピボットボルト5が締め付けられた状態ではロータ4の本体部41よりも右側に突出し、第2ピボットボルト5の軸部51の軸方向(左右方向)に直交する方向から見てロータ4の本体部41を覆っている。これにより、ハウジング2とロータ4との間に、泥などの異物が進入するのを囲み部29によって抑制することができる。
【0034】
本実施形態のロータリセンサ1は、二輪車の車体100を起立状態で保持するスタンド101が格納位置にあるか否かを検出するものであり、ハウジング2と、ロータ4と、被検知部42(被検知体)と、コイル31と、集積回路32(検出回路)とを備えている。ハウジング2は車体100に取り付けられる。ロータ4は、ハウジング2に対して回転自在に設けられ、スタンド101の回転に応じて回転する。被検知部42は導電材料からなり、ハウジング2又はロータ4の何れか(本実施形態ではロータ4)に保持されている。コイル31は、回路基板30に形成された平面コイルからなり、ロータ4の回転に伴って被検知部42との距離が変化する。集積回路32は、コイル31のコンダクタンスからスタンド101が格納位置にあるか否かを検出する。尚、本実施形態では被検知体(被検知部42)がロータ4に保持され、コイル31はハウジング2に収納されているが、被検知体がハウジング2側に保持され、コイル31がロータ4に保持されるものでもよい。
【0035】
上述のように、コイル31が回路基板30に形成された平面コイルで構成されているから、従来のようにボビンに巻回されたコイルと比べて、コイル31と被検知部42との間の隙間を小さくできる。図4はロータ4の回転角度とコンダクタンスの関係を示し、図4中の実線cは本実施形態(平面コイルの場合)の特性を、一点鎖線dは従来例(ボビンに巻回されたコイルの場合)の特性を示している。この図から判るように、本実施形態では従来例に比べて、ロータ4の角度変化に対してコンダクタンスの変化が大きくなっているから、それによって感度の向上を図ることができる。また、高い感度が得られることで、コイル31と被検知部42との間に設けた隙間のばらつきの許容範囲を大きくでき、製造が容易になる。また、コイル31が回路基板30に形成された平面コイルで構成されているから、従来例のようにコアをボビンにインサート成形する工程や、ボビンにコイルを巻き付ける工程や、コイルを検出回路の基板に実装する工程が無くなり、製造工程を簡略化できる。
【0036】
また本実施形態では、回路基板30において、被検知部42側の面と反対側の面に集積回路32(検知回路の回路部品)が実装されている。
【0037】
これにより、回路基板30において被検知部42側の面に集積回路32が実装された場合に比べて、コイル31と被検知部42との間の隙間をさらに小さくでき、検出感度がさらに向上する。
【0038】
尚、本実施形態では回路基板30の両面に、平面コイル31を構成するコイルパターンが形成されているが、少なくとも被検知部42側の面に平面コイル31のコイルパターンが形成されていればよい。
【符号の説明】
【0039】
1 ロータリセンサ
2 ハウジング
3 検知部
4 ロータ
30 回路基板
31 コイル
32 集積回路
42 被検知部(被検知体)
101 スタンド
【技術分野】
【0001】
本発明は、ロータリセンサに関するものである。
【背景技術】
【0002】
二輪車を駐車する際に車体を起立状態で保持するため、二輪車にはスタンドが設けられている。このスタンドが起立位置(駐車時の位置)にあるときにエンジンが始動していると、スタンドが格納されたときに急発進するため、スタンドが起立位置にある場合はエンジンが始動しないようにインターロック機能が設けられている。そのため、図5に示すように車体100とスタンド101との連結部位には、スタンド101が起立位置にあるか、格納位置(走行時の位置)にあるかを検知するためのロータリセンサ1が取り付けられている(例えば特許文献1参照)。
【0003】
スタンド101は、車体100のブラケット102に螺子止めされた第1ピボットボルト(図示せず)が挿通されることによって、車体100に対して矢印A1の方向に回転自在に取り付けられている。ブラケット102に設けられた棒状の突起105と、スタンド101の下側部に設けられた突起106には、それぞれ、コイルばね107の両端が係止され、コイルばね107のバネ力によって、スタンド101を格納した状態が保持される。
【0004】
上記特許文献に開示されたロータリセンサ1は、スタンド101とともに回転するロータ(図示せず)と、スタンド101の位置を検出する検出部(図示せず)と、この検出部を収納して車体100に固定されるハウジング2とを主要な構成として備えている。
【0005】
ロータには導電材料からなる被検出体が保持されており、ロータが回転することによって、ロータに保持された被検出体の位置が変位する。
【0006】
検出部は、コアが挿通されたボビンと、このボビンに巻回されたコイルと、コイルを高周波で駆動するとともに、スタンド101の回転によってコイルのコンダクタンスが変化することからスタンド101の位置を検出する検出回路を備えている。ここで、スタンド101が起立位置及び格納位置(走行時の位置)の何れか一方にある場合はコイルに被検知体が対向する位置にロータが回転し、起立位置及び格納位置の他方にある場合はコイルに被検知体が対向しない位置にロータが回転している。したがって、スタンド101の起立位置と格納位置とで導電材料からなる被検知体とコイルとの距離が変化し、それによってコイルの磁束が変化するので、コイルのコンダクタンスも変化する。検出回路では、コイルのコンダクタンスと所定の閾値との高低を比較しており、その比較結果からスタンド101が起立位置と格納位置の何れにあるかを検出している。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2010−228565号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
ところで、被検知体が接近するか、或いは、遠ざかることによって、大きな磁束変化が得られるのは、被検知体に近いコイルの先端部となる。上記特許文献に開示されたロータリセンサ1では、コイルと被検知体との間にボビンの鍔が存在するため、鍔の厚み分だけ被検知体とコイルとの間の隙間が大きくなり、それによってコンダクタンスの変化が小さくなり、検出感度が低下するという問題があった。
【0009】
また、ロータリセンサを製造するために、コアをボビンにインサート成形する工程や、ボビンにコイルを巻き付ける工程や、コイルを検出回路の基板に実装する工程が必要になり、製造工程が増えてしまうという問題もあった。
【0010】
本発明は上記課題に鑑みて為されたものであり、その目的とするところは、製造が容易で、検出感度を向上させたロータリセンサを提供することにある。
【課題を解決するための手段】
【0011】
本発明のロータリセンサは、二輪車の車体を起立状態で保持するスタンドが格納位置にあるか否かを検出するものである。このロータリセンサは、ハウジングと、ロータと、被検知体と、コイルと、検出回路とを備えている。ハウジングは車体に取り付けられている。ロータは、スタンドの回転に応じて回転する。被検知体は導電材料からなり、ハウジング又はロータの何れかに保持される。コイルは、基板に形成された平面コイルからなり、ロータの回転に伴って被検知体との距離が変化する。検出回路は、コイルのコンダクタンスからスタンドが格納位置にあるか否かを検出する。
【0012】
このロータリセンサにおいて、基板には、被検知体側の面と反対側の面に検知回路の回路部品が実装されることも好ましい。
【発明の効果】
【0013】
本発明によれば、製造が容易で、検出感度を向上させたロータリセンサを提供することができる。
【図面の簡単な説明】
【0014】
【図1】本実施形態のロータリセンサの分解斜視図である。
【図2】同上のロータリセンサの断面図である。
【図3】同上のロータリセンサを示し、(a)は起立位置でのコイルと(a)(b)は同上のロータリセンサの回転位置を説明する説明図である。
【図4】同上のロータリセンサの回転角度とコンダクタンスの関係を説明する図である。
【図5】ロータリセンサの使用状態を示す要部の斜視図である。
【発明を実施するための形態】
【0015】
本実施形態のロータリセンサについて図1〜図4を参照して説明する。
【0016】
図1はロータリセンサ1の分解斜視図、図2はロータリセンサ1の断面図であり、図5はロータリセンサ1の使用状態を説明する斜視図である。このロータリセンサ1は、二輪車の車体100に取り付けられ、例えば駐車時に車体100を起立状態に保持するスタンド101が起立状態にあるか、格納状態にあるかを検出するものである。尚、図2では、スタンド101が固定される車体100のブラケット102は図示が省略されている。また以下の説明では、左右方向は図2に示す向きを基準として説明する。すなわち二輪車のスタンド101に対してロータリセンサ1が取り付けられる方向を左右方向として説明を行うこととする。
【0017】
このロータリセンサ1は、検出部3と、検出部3を内部に収納するハウジング2と、ロータ4を主要な構成として備える。そして、ハウジング2及びロータ4は第2ピボットボルト5を用いて二輪車の車体100(具体的には第1ピボットボルト104)に取り付けられる。
【0018】
第2ピボットボルト5は段付きボルトからなり、軸部51の一端側は細径になっており、この細径部に螺子部51aが設けられている。また軸部51の他端側には、径方向に突出する円板状の頭部52が一体に設けられている。
【0019】
検出部3は、扁平な円環形状のプリント配線板からなる回路基板30を備えている。回路基板30は、厚み方向を左右方向(図2の左右方向)としてハウジング2の内部に収納されている。回路基板30の中央には孔30aが開口しており、この孔30aを挟んで対角の位置に、平面コイルからなるコイル31と、検出回路を構成する1チップの集積回路32が実装されている。ここで、回路基板30の表面及び裏面に、それぞれ、コイル状の導電パターンが形成されており、表面及び裏面の導電パターンをスルーホールなどで導通することによって、1つのコイル31が形成されている。また集積回路32は、回路基板30において、後述する被検知部42側の面(図2の右面)と反対側の面(図2の左面)に実装されている。この集積回路32によって、コイル31に高周波電流を流すとともに、コイル31のコンダクタンスと所定の閾値との高低を比較した結果からスタンド101が格納位置にあるか否かを検出する検出回路が構成されている。後で詳しく説明するが、ロータ4は導電材料からなり、ロータ4の一部で被検知部42が構成されており、スタンド101が起立位置にあるか格納位置にあるかによってロータ4の位置が変化し、それによって被検知部42とコイル31との距離が変化する。したがって、スタンド101の位置(起立位置又は格納位置)に応じてコイル31のコンダクタンスが変化することになり、検出回路では、コンダクタンスの変化からスタンド101が起立位置にあるか格納位置にあるかを検出して外部に出力する。尚、このような検出回路は周知技術で実現可能であるので、詳細な図示並びに説明は省略する。
【0020】
ハウジング2は、それぞれ絶縁性の合成樹脂により形成されたボディ2a及びカバー2bを結合して構成され、内部の収納空間20に上述した検出部3を収納する。
【0021】
ボディ2aは、全体として円筒形状であって、収納空間20が設けられた本体部21を備えている。本体部21の一端側(図2の右側)は略全体が開口し、他端側(図2の左側)を閉塞する底壁の外側面には凹部24が設けられている。凹部24は、第2ピボットボルト5の頭部52よりも直径の大きい丸穴状に凹んでおり、この凹部24の中心には、第2ピボットボルト5の軸部51が挿入される軸受け孔24aが設けられている(図2参照)。またボディ2aの底壁の内側面からは、第2ピボットボルト5の軸部51を囲む円筒形状であって、内周面が軸受け孔24aの内周面を構成するとともに、外周面が収納空間20の内面を構成する筒状凸部25が右方向(開口側)に突出する形で設けられている。
【0022】
また本体部21の外周面には、複数本の芯線からなる電線C1を収納空間20から外部に導出するための電線引き出し部22が径方向に突出するように設けられている。さらに本体部21の外周面には、径方向に突出する突起部23が電線引き出し部22との間に間隔を開けて設けられており、この突起部23と電線引き出し部22との間に突起105を挟むことでハウジング2の車体100に対する回転が規制されている。
【0023】
カバー2bは円板状に形成されており、カバー2bの中心には、筒状凸部25の先端が嵌る丸孔26が形成されている。
【0024】
ボディ2aの内部には、回路基板30が、集積回路32の実装面を底壁側(取付状態においてロータ4と反対側)に向け、中央の孔30aに筒状凸部25が通された状態で収納されている。尚、筒状凸部25の外周面と収納空間20の内側面とには、それぞれ、回路基板30の左面に当接する段部27が設けられており、回路基板30をボディ2aに対して例えば熱溶着することで、検出部3がボディ2aに固定される。
【0025】
回路基板30をボディ2aに収納した状態で、ボディ2aの開口からカバー2bがボディ2aの内部に挿入されると、ボディ2aとカバー2bの間に回路基板30(検出部3)が保持される。筒状凸部25の外周面と収納空間20の内側面とには、それぞれ、カバー2bの左面に当接する段部28が設けられており、段部28にカバー2bの左面が当接することによって、カバー2bがボディ2aに対し左右方向において位置決めされる。そして、ボディ2aとカバー2bの当接部位を例えばレーザ溶着によって溶着することで、ハウジング2内部の収納空間20が密閉されている。ここで、筒状凸部25の右端面はカバー2bの右面よりも右方に突出し、ロータ4に当接している。したがって、ロータ4は、その表面が筒状凸部25の右端面と摺動しながら回転することになり、車体100への取付時には、ハウジング2とロータ4との間の摩擦を低減するために、筒状凸部25の右端面にグリスが塗布されている。尚、回路基板30には、電線引き出し部22から外部に引き出される電線C1の一端が電気的に接続されており、集積回路32の電源は電線C1を介して供給されるとともに、集積回路32の出力は電線C1を介して外部に出力される。
【0026】
ロータ4は例えば金属板に打ち抜き加工と絞り加工とが施されてなり、厚さ方向を左右方向に向けた扁平な形状であって、第2ピボットボルト5の軸部51が挿通される円形状の挿通穴41aが貫設された本体部41を有している。このロータ4は、ハウジング2(ボディ2aに設けられた筒状凸部25)とスタンド101(第1ピボットボルト104)との間に挟まれることで、左右方向の変位が規制されている。ここで、ロータ4に設けられた挿通孔41aの内径は、第2ピボットボルト5の螺子部51aの外径より大きく、且つ、軸部51の大径部分の外径よりは小さくなっており、ロータ4は軸部51の大径部分と第1ピボットボルト104の間で挟まれることによっても、左右方向の変位が規制されていいる。
【0027】
また本体部41には、挿通穴41aの中心位置を中心とする扇形の被検知部42が一体に設けられている。さらに本体部41には、挿通孔41aから径方向に突出するとともに、その先端側が厚み方向の一端側(取付状態における車体100側)に突出するL形の腕部43が一体に設けられている。この腕部43は、扇形の被検知部42を構成する一方の弦に対して、挿通孔41aを挟んで反対側に設けられている。また被検知部42の外周縁からは、厚み方向の一端側(取付状態における車体100側)に突出する周壁44が被検知部42と一体に設けられている。このロータ4が第2ピボットボルト5を用いてハウジング2と共にスタンド101にねじ固定されると、腕部43及び周壁44がスタンド101の一端部を両側から挟み、これによってスタンド101に対するロータ4の回転が規制されることになる。したがって、スタンド101が図5のA1方向に回転すると、ロータ4はスタンド101と共に回転するから、ハウジング2に対してロータ4が相対的に回転することになる。
【0028】
ここで、図3(a)はスタンド101が起立位置に移動した状態、図3(b)はスタンド101が格納位置に移動した状態をそれぞれ示している。尚、スタンド101が起立位置にあるときのロータ4の回転角度をD1、スタンド101が格納位置にあるときのロータ4の回転角度をD2とする。
【0029】
図3の例では、起立状態においてロータ4の被検知部42がコイル31の右側に位置しており(対向しており)、格納状態においてはロータ4の被検知部42がコイル31の右側に位置していない(対向していない)。したがって、車体100に対するスタンド101の回転に伴って、ロータ4がハウジング2に対して回転することにより、主に被検知部42とコイル31との距離が変化するので、コイル31のコンダクタンスが変化する。
【0030】
このロータリセンサ1は以下のようにして車体100に取り付けられる。先ず作業者は第1ピボットボルト104の右側にロータ4とハウジング2を重ねて配置する。そして、作業者が、ハウジング2の軸受け孔24aとロータ4の挿通孔41aとに第2ピボットボルト5を通し、第1ピボットボルト104の頭部104aに設けたネジ穴104bにねじ込むことによって、ハウジング2とともにロータ4がスタンド101に螺子固定される。尚、第2ピボットボルトの軸部51には、例えば合成ゴムのような弾性を有する材料からなるOリング6が装着されている。
【0031】
以上のようにしてロータリセンサ1はスタンド101に取り付けられるのであるが、車体100に取り付けられた状態では、電線引き出し部22と突起部23の間に突起105が挟まれることで車体100に対するハウジング2の回転が規制されている。一方、ロータ4はハウジング2に対して回転自在に保持されており、スタンド101が起立位置と格納位置の間で回転すると、スタンド101と共にロータ4が回転し、それによってロータ4がハウジング2に対して相対的に回転するようになっている。ここで、被検知部42は略4分の1円に形成されており、被検知部42は、スタンド101が起立位置及び格納位置の何れか一方の位置にあるときのみコイル31の右側に位置する。したがって、スタンド101が他方の位置にあるときはコイル31の右側に被検知部42は位置しない。つまり、車体100に対するスタンド101の回転に伴ってロータ4がハウジング2に対して回転すると、主に被検知部42とコイル31との距離が変化することによって、コイル31のコンダクタンスが変化する。これにより、スタンド101が起立位置及び格納位置の何れか一方にある場合と他方にある場合とで集積回路32の出力が変化するから、スタンド101が何れの位置にあるかを検出することができる。
【0032】
ここで、第2ピボットボルト5の頭部52が挿入される凹部24の底面には、軸受け孔24aの開口縁に円環状の溝24bが形成され、この溝24bにOリング6が配置される。Oリング6の弾性変形していない状態での厚さ寸法は溝24bの深さ寸法よりも大きく、第2ピボットボルト5が締め付けられた状態ではOリング6は第2ピボットボルト5の頭部52と溝24bの底面とに挟まれて潰れるように弾性変形した状態となっている。すなわち、Oリング6の弾性力でハウジング2がロータ4に押し付けられることにより、ロータ4に対するハウジング2のがたつき(及びこれに伴う誤検出)が抑えられている。
【0033】
また、ボディ2aは、収納空間20の内周面を構成する円筒形状の囲み部29を有しており、この囲み部29は筒状凸部25の右端よりも、右方向に突出している。この囲み部29は、第2ピボットボルト5が締め付けられた状態ではロータ4の本体部41よりも右側に突出し、第2ピボットボルト5の軸部51の軸方向(左右方向)に直交する方向から見てロータ4の本体部41を覆っている。これにより、ハウジング2とロータ4との間に、泥などの異物が進入するのを囲み部29によって抑制することができる。
【0034】
本実施形態のロータリセンサ1は、二輪車の車体100を起立状態で保持するスタンド101が格納位置にあるか否かを検出するものであり、ハウジング2と、ロータ4と、被検知部42(被検知体)と、コイル31と、集積回路32(検出回路)とを備えている。ハウジング2は車体100に取り付けられる。ロータ4は、ハウジング2に対して回転自在に設けられ、スタンド101の回転に応じて回転する。被検知部42は導電材料からなり、ハウジング2又はロータ4の何れか(本実施形態ではロータ4)に保持されている。コイル31は、回路基板30に形成された平面コイルからなり、ロータ4の回転に伴って被検知部42との距離が変化する。集積回路32は、コイル31のコンダクタンスからスタンド101が格納位置にあるか否かを検出する。尚、本実施形態では被検知体(被検知部42)がロータ4に保持され、コイル31はハウジング2に収納されているが、被検知体がハウジング2側に保持され、コイル31がロータ4に保持されるものでもよい。
【0035】
上述のように、コイル31が回路基板30に形成された平面コイルで構成されているから、従来のようにボビンに巻回されたコイルと比べて、コイル31と被検知部42との間の隙間を小さくできる。図4はロータ4の回転角度とコンダクタンスの関係を示し、図4中の実線cは本実施形態(平面コイルの場合)の特性を、一点鎖線dは従来例(ボビンに巻回されたコイルの場合)の特性を示している。この図から判るように、本実施形態では従来例に比べて、ロータ4の角度変化に対してコンダクタンスの変化が大きくなっているから、それによって感度の向上を図ることができる。また、高い感度が得られることで、コイル31と被検知部42との間に設けた隙間のばらつきの許容範囲を大きくでき、製造が容易になる。また、コイル31が回路基板30に形成された平面コイルで構成されているから、従来例のようにコアをボビンにインサート成形する工程や、ボビンにコイルを巻き付ける工程や、コイルを検出回路の基板に実装する工程が無くなり、製造工程を簡略化できる。
【0036】
また本実施形態では、回路基板30において、被検知部42側の面と反対側の面に集積回路32(検知回路の回路部品)が実装されている。
【0037】
これにより、回路基板30において被検知部42側の面に集積回路32が実装された場合に比べて、コイル31と被検知部42との間の隙間をさらに小さくでき、検出感度がさらに向上する。
【0038】
尚、本実施形態では回路基板30の両面に、平面コイル31を構成するコイルパターンが形成されているが、少なくとも被検知部42側の面に平面コイル31のコイルパターンが形成されていればよい。
【符号の説明】
【0039】
1 ロータリセンサ
2 ハウジング
3 検知部
4 ロータ
30 回路基板
31 コイル
32 集積回路
42 被検知部(被検知体)
101 スタンド
【特許請求の範囲】
【請求項1】
二輪車の車体を起立状態で保持するスタンドが格納位置にあるか否かを検出するロータリセンサであって、
前記車体に取り付けられるハウジングと、
前記スタンドの回転に応じて回転するロータと、
導電材料からなり、前記ハウジング又は前記ロータの何れかに保持された被検知体と、
基板に形成された平面コイルからなり、前記ロータの回転に伴って前記被検知体との距離が変化するコイルと、
前記コイルのコンダクタンスから前記スタンドが前記格納位置にあるか否かを検出する検出回路とを備えたことを特徴とするロータリセンサ。
【請求項2】
前記基板において、前記被検知体側の面と反対側の面に前記検知回路の回路部品が実装されたことを特徴とする請求項1記載のロータリセンサ。
【請求項1】
二輪車の車体を起立状態で保持するスタンドが格納位置にあるか否かを検出するロータリセンサであって、
前記車体に取り付けられるハウジングと、
前記スタンドの回転に応じて回転するロータと、
導電材料からなり、前記ハウジング又は前記ロータの何れかに保持された被検知体と、
基板に形成された平面コイルからなり、前記ロータの回転に伴って前記被検知体との距離が変化するコイルと、
前記コイルのコンダクタンスから前記スタンドが前記格納位置にあるか否かを検出する検出回路とを備えたことを特徴とするロータリセンサ。
【請求項2】
前記基板において、前記被検知体側の面と反対側の面に前記検知回路の回路部品が実装されたことを特徴とする請求項1記載のロータリセンサ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−128986(P2012−128986A)
【公開日】平成24年7月5日(2012.7.5)
【国際特許分類】
【出願番号】特願2010−277498(P2010−277498)
【出願日】平成22年12月13日(2010.12.13)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
【公開日】平成24年7月5日(2012.7.5)
【国際特許分類】
【出願日】平成22年12月13日(2010.12.13)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]