
ロータリテーブルの回転角度較正方法
【目的】 ロータリテーブルによるワークの自動供給装置において、メモリに記憶されたテーブルの角度データを較正する。
【構成】 自動搬送機構に設けられたロボット機構5のハンドアーム5a に光学式の変位センサ9a を、また、テーブル4の半径ORの方向に回転角度の基準を示す基準反射板9b をそれぞれ設ける。ロータリテーブル4の中心Oを通るX軸を固定側の基準線とし、メモリに記憶された基準角度データを制御回路に与えてテーブルを回転し、基準反射板をX軸に一致させて停止する。変位センサ9a をX方向に移動して基準反射板の両端のY座標値ya,yb をそれぞれ測定し、両Y座標値の差と両端間の長さLとによりX軸に対する基準反射板のズレ角度θを算出し、これをメモリ10c に与えて記憶された各角度データを較正する。
【構成】 自動搬送機構に設けられたロボット機構5のハンドアーム5a に光学式の変位センサ9a を、また、テーブル4の半径ORの方向に回転角度の基準を示す基準反射板9b をそれぞれ設ける。ロータリテーブル4の中心Oを通るX軸を固定側の基準線とし、メモリに記憶された基準角度データを制御回路に与えてテーブルを回転し、基準反射板をX軸に一致させて停止する。変位センサ9a をX方向に移動して基準反射板の両端のY座標値ya,yb をそれぞれ測定し、両Y座標値の差と両端間の長さLとによりX軸に対する基準反射板のズレ角度θを算出し、これをメモリ10c に与えて記憶された各角度データを較正する。
【発明の詳細な説明】
【0001】
【産業上の利用分野】この発明は、ワークの自動供給装置に使用されるロータリテーブルの角度のズレを較正する方法に関する。
【0002】
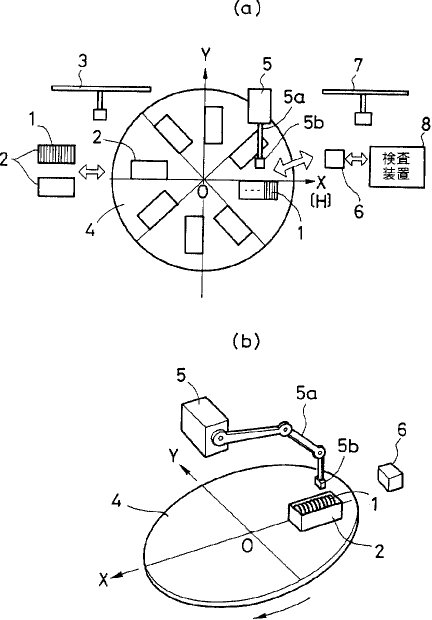
【従来の技術】例えば磁気ディスクの検査においては、ディスク・ワークをワーク・カセット(以下それぞれを単にワーク、カセットという)に収納し、自動供給装置によりカセットよりワーク取り出して検査装置に供給し、検査済みのワークをカセットに収納する方法が行われている。図2(a) はロータリテーブル(以下単にテーブルという)によるカセットとワークの自動供給装置の概略の構成を示す。テーブル4は半径方向に放射状に、例えば8個のカセット2を載置することができる。テーブル4に対するカセット2の供給/排出はパルスモータによりテーブルを回転して所定の位置に停止し、ロボット機構3により行われる。一方、カセット2と検査装置8に対するワーク1のアクセスはロボット機構5,7により行われる。テーブル4の中心Oを通るX軸を固定側の基準線とし、例えばこの基準線の位置をロボット機構5のアクセス位置[H]とする。図示しない制御回路によりパルスモータを制御してテーブル4を回転し、未検査のワークを収納したカセットをアクセス位置[H]に停止する。ロボット機構5のチャック機構5b (図(b) 参照)によりワーク1をチャックして中継台6まで搬送して載置し、中継台よりロボット機構7により検査装置8に対して供給される。検査が終了したワークは上記と逆順に搬送され、テーブルを回転して検査済みワーク用のカセットをアクセス位置[H]に停止して収納される。(b) によりロボット機構5の構造と動作を説明すると、そのハンドアーム5a は矢印α,β,γの3軸自由度を有し、先端部にチャック機構5bが設けられている。テーブル4の回転によりアクセス位置[H]に停止したカセットに対して、ハンドアーム6a を動作してチャック機構6b により対象のワークをチャックし、または解放してカセットに対してワークがアクセスされる。
【0003】
【発明が解決しようとする課題】さて、上記においては、メモリに記憶された各カセットの載置位置の角度データを読出して制御回路によりテーブル4を回転し、対象とするカセットがアクセス位置[H]に停止される。しかし、自動供給装置の製作時点や定期検査などにおいては、テーブルは任意の回転角度にあるので、テーブルの適当な角度を基準角度とし、これが基準線のX軸に一致したときの基準角度データをメモリに記憶し、これより各カセットの載置位置の角度データを求める方法がとられている。従来はこの基準角度データは、テーブルの回転角度をノギスなどにより測定して求められているが、精度が良好でない。もし基準角度データが基準線に対して角度ズレしているときは、各カセットが位置ズレして、ロボット機構5のチャック機構5b が望みのワークを正確にチャックできない。従って、ズレ角度を正確に測定してメモリの角度データを較正することが必要である。この発明は以上に鑑みてなされたもので、テーブルの基準角度を示す手段と、固定側の基準線に対するテーブルの基準角度のズレ角度を正確に測定する手段とを設け、初期調整などにおいて、メモリに記憶された各角度データを較正する方法を提供することを目的とするものである。
【0004】
【課題を解決するための手段】この発明は上記の目的を達成するロータリテーブルの角度較正方法であって、上記の自動供給装置において、ロボット機構のハンドアームに光学式の変位センサを、また、テーブルに対してその半径方向に回転角度の基準を示す基準反射板をそれぞれ設ける。テーブルの中心Oを通るX軸を固定側の基準線とし、メモリに記憶された基準角度データを制御回路に与えてテーブルを回転し、基準反射板をX軸に一致させて停止する。変位センサをX方向に移動して基準反射板の両端のY座標値をそれぞれ測定し、両Y座標値の差と両端間の長さとによりX軸に対する基準反射板のズレ角度を算出し、これをメモリに与えて記憶された各角度データを較正するものである。
【0005】
【作用】上記の較正方法においては、基準角度データを制御回路に与えてテーブルを回転し、基準反射板をX軸に一致させて停止する。変位センサにより、基準反射板の両端のY座標値がそれぞれ測定され、両測定値の差と両端間の長さとによりX軸に対する基準反射板の正確なズレ角度が算出される。これがメモリに与えられて記憶された各角度データが較正され、これにより各カセットが所定の位置に正しく載置され、またそれぞれがアクセス位置に正しく停止されてロボット機構によるワークアクセスが良好になされる。
【0006】
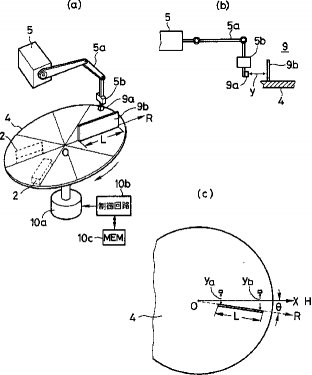
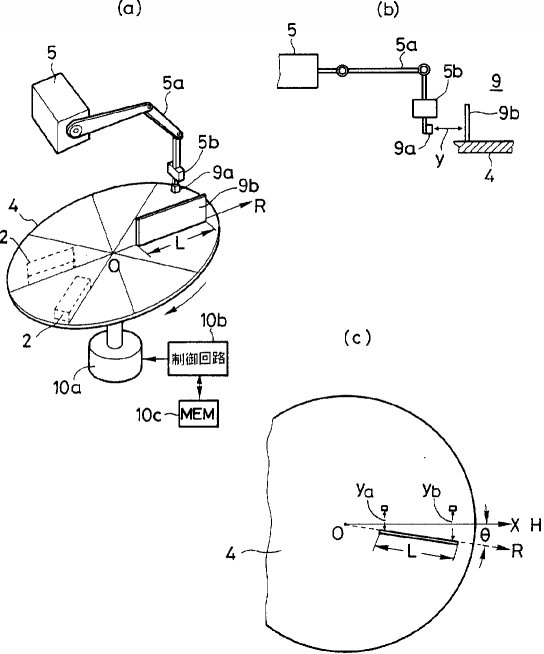
【実施例】図1はこの発明の一実施例を示す。図1(a) において、ロータリテーブル4はこれを回転するパルスモータ10aと、角度データを記憶するメモリ(MEM)10c 、およびパルスモータの回転を制御する制御回路10b を具備する。図1(a),(b) において、ワークアクセス用のロボット機構5のハンドアーム5a の先端に、チャック機構5b の動作に支障しないように、光学式の変位センサ9a を取り付ける。変位センサ9a としてはレーザによるものが小型で測定精度が優れているので適当である。一方、テーブル4の中心Oを通る半径OR上に基準反射板9b を固定し、その角度位置をテーブルの基準角度とする。基準反射板9b を基準としてテーブルを円周方向に、例えば8等分して各カセット2の載置位置とし、基準角度と各センサの載置位置の角度データをメモリ10c に記憶する。(c) において、テーブルの中心Oを通るX軸を固定側の基準線とし、メモリ10c より基準角度データを制御回路10b に与えてパルスモータ10a によりテーブルを回転して、基準反射板9b をX軸またはその付近に停止する。ハンドアーム5a の動作により変位センサ9a をX方向に移動して基準反射板9b の両端に対応させ、それぞれにおけるY座標値ya,yb を測定し、計算式:θ=arctan[(yb −ya)/L],L:両端間の長さ、により、X軸に対する基準反射板9b のズレ角度θを求め、これをメモリ10cに与えて記憶された基準角度データと各カセットの角度データとをズレ角度θだけ較正する。較正された基準角度データによりテーブルを回転して変位センサにより両座標値を再測定し、これらが等しいことを確認する。以上により較正された各角度データにより、テーブルは所定の位置に対して正確に停止して各カセットがそれぞれの載置位置に正しく載置され、また各カセットはアクセス位置[H]に正しく停止してロボット機構5によるワークアクセスが良好になされる。
【0007】
【発明の効果】以上の説明のとおり、この発明による回転角度較正方法においては、ロボット機構のハンドアームに設けられた変位センサにより、ロータリテーブルに設けられた基準反射板の両端のY座標値が測定され、両測定値の差と両端間の長さとにより基準線のX軸に対する基準反射板のズレ角度が算出され、メモリに記憶された各角度データがこのズレ角度だけ較正されるもので、これにより各カセットが所定の位置に正しく載置され、また各カセットがアクセス位置に正しく停止して、ロボット機構によるワークアクセスが良好になされる効果には大きいものがある。
【図面の簡単な説明】
【図1】 この発明の一実施例を示し、(a),(b) は変位センサと基準反射板の取り付けと配置を示す図、(c) はズレ角度の算出方法の説明図である。
【図2】 ロータリテーブルによるワーク・カセットとワークの自動供給装置を示し、(a) は概略の構成図、(b) はロボット機構のハンドアームと、これに取り付けたチャック機構を示す外観図である。
【符号の説明】
1…ディスク・ワーク、またはワーク、2…ワーク・カセット、またはカセット、3…ロボット機構、4…ロータリテーブル、5…ロボット機構、5a …ハンドアーム、5b …チャック機構、6…中継台、7…ロボット機構、8…検査装置、9a …変位センサ、9b …基準反射板、10a …パルスモータ、10b …制御回路、10c …メモリ(MEM)。
【0001】
【産業上の利用分野】この発明は、ワークの自動供給装置に使用されるロータリテーブルの角度のズレを較正する方法に関する。
【0002】
【従来の技術】例えば磁気ディスクの検査においては、ディスク・ワークをワーク・カセット(以下それぞれを単にワーク、カセットという)に収納し、自動供給装置によりカセットよりワーク取り出して検査装置に供給し、検査済みのワークをカセットに収納する方法が行われている。図2(a) はロータリテーブル(以下単にテーブルという)によるカセットとワークの自動供給装置の概略の構成を示す。テーブル4は半径方向に放射状に、例えば8個のカセット2を載置することができる。テーブル4に対するカセット2の供給/排出はパルスモータによりテーブルを回転して所定の位置に停止し、ロボット機構3により行われる。一方、カセット2と検査装置8に対するワーク1のアクセスはロボット機構5,7により行われる。テーブル4の中心Oを通るX軸を固定側の基準線とし、例えばこの基準線の位置をロボット機構5のアクセス位置[H]とする。図示しない制御回路によりパルスモータを制御してテーブル4を回転し、未検査のワークを収納したカセットをアクセス位置[H]に停止する。ロボット機構5のチャック機構5b (図(b) 参照)によりワーク1をチャックして中継台6まで搬送して載置し、中継台よりロボット機構7により検査装置8に対して供給される。検査が終了したワークは上記と逆順に搬送され、テーブルを回転して検査済みワーク用のカセットをアクセス位置[H]に停止して収納される。(b) によりロボット機構5の構造と動作を説明すると、そのハンドアーム5a は矢印α,β,γの3軸自由度を有し、先端部にチャック機構5bが設けられている。テーブル4の回転によりアクセス位置[H]に停止したカセットに対して、ハンドアーム6a を動作してチャック機構6b により対象のワークをチャックし、または解放してカセットに対してワークがアクセスされる。
【0003】
【発明が解決しようとする課題】さて、上記においては、メモリに記憶された各カセットの載置位置の角度データを読出して制御回路によりテーブル4を回転し、対象とするカセットがアクセス位置[H]に停止される。しかし、自動供給装置の製作時点や定期検査などにおいては、テーブルは任意の回転角度にあるので、テーブルの適当な角度を基準角度とし、これが基準線のX軸に一致したときの基準角度データをメモリに記憶し、これより各カセットの載置位置の角度データを求める方法がとられている。従来はこの基準角度データは、テーブルの回転角度をノギスなどにより測定して求められているが、精度が良好でない。もし基準角度データが基準線に対して角度ズレしているときは、各カセットが位置ズレして、ロボット機構5のチャック機構5b が望みのワークを正確にチャックできない。従って、ズレ角度を正確に測定してメモリの角度データを較正することが必要である。この発明は以上に鑑みてなされたもので、テーブルの基準角度を示す手段と、固定側の基準線に対するテーブルの基準角度のズレ角度を正確に測定する手段とを設け、初期調整などにおいて、メモリに記憶された各角度データを較正する方法を提供することを目的とするものである。
【0004】
【課題を解決するための手段】この発明は上記の目的を達成するロータリテーブルの角度較正方法であって、上記の自動供給装置において、ロボット機構のハンドアームに光学式の変位センサを、また、テーブルに対してその半径方向に回転角度の基準を示す基準反射板をそれぞれ設ける。テーブルの中心Oを通るX軸を固定側の基準線とし、メモリに記憶された基準角度データを制御回路に与えてテーブルを回転し、基準反射板をX軸に一致させて停止する。変位センサをX方向に移動して基準反射板の両端のY座標値をそれぞれ測定し、両Y座標値の差と両端間の長さとによりX軸に対する基準反射板のズレ角度を算出し、これをメモリに与えて記憶された各角度データを較正するものである。
【0005】
【作用】上記の較正方法においては、基準角度データを制御回路に与えてテーブルを回転し、基準反射板をX軸に一致させて停止する。変位センサにより、基準反射板の両端のY座標値がそれぞれ測定され、両測定値の差と両端間の長さとによりX軸に対する基準反射板の正確なズレ角度が算出される。これがメモリに与えられて記憶された各角度データが較正され、これにより各カセットが所定の位置に正しく載置され、またそれぞれがアクセス位置に正しく停止されてロボット機構によるワークアクセスが良好になされる。
【0006】
【実施例】図1はこの発明の一実施例を示す。図1(a) において、ロータリテーブル4はこれを回転するパルスモータ10aと、角度データを記憶するメモリ(MEM)10c 、およびパルスモータの回転を制御する制御回路10b を具備する。図1(a),(b) において、ワークアクセス用のロボット機構5のハンドアーム5a の先端に、チャック機構5b の動作に支障しないように、光学式の変位センサ9a を取り付ける。変位センサ9a としてはレーザによるものが小型で測定精度が優れているので適当である。一方、テーブル4の中心Oを通る半径OR上に基準反射板9b を固定し、その角度位置をテーブルの基準角度とする。基準反射板9b を基準としてテーブルを円周方向に、例えば8等分して各カセット2の載置位置とし、基準角度と各センサの載置位置の角度データをメモリ10c に記憶する。(c) において、テーブルの中心Oを通るX軸を固定側の基準線とし、メモリ10c より基準角度データを制御回路10b に与えてパルスモータ10a によりテーブルを回転して、基準反射板9b をX軸またはその付近に停止する。ハンドアーム5a の動作により変位センサ9a をX方向に移動して基準反射板9b の両端に対応させ、それぞれにおけるY座標値ya,yb を測定し、計算式:θ=arctan[(yb −ya)/L],L:両端間の長さ、により、X軸に対する基準反射板9b のズレ角度θを求め、これをメモリ10cに与えて記憶された基準角度データと各カセットの角度データとをズレ角度θだけ較正する。較正された基準角度データによりテーブルを回転して変位センサにより両座標値を再測定し、これらが等しいことを確認する。以上により較正された各角度データにより、テーブルは所定の位置に対して正確に停止して各カセットがそれぞれの載置位置に正しく載置され、また各カセットはアクセス位置[H]に正しく停止してロボット機構5によるワークアクセスが良好になされる。
【0007】
【発明の効果】以上の説明のとおり、この発明による回転角度較正方法においては、ロボット機構のハンドアームに設けられた変位センサにより、ロータリテーブルに設けられた基準反射板の両端のY座標値が測定され、両測定値の差と両端間の長さとにより基準線のX軸に対する基準反射板のズレ角度が算出され、メモリに記憶された各角度データがこのズレ角度だけ較正されるもので、これにより各カセットが所定の位置に正しく載置され、また各カセットがアクセス位置に正しく停止して、ロボット機構によるワークアクセスが良好になされる効果には大きいものがある。
【図面の簡単な説明】
【図1】 この発明の一実施例を示し、(a),(b) は変位センサと基準反射板の取り付けと配置を示す図、(c) はズレ角度の算出方法の説明図である。
【図2】 ロータリテーブルによるワーク・カセットとワークの自動供給装置を示し、(a) は概略の構成図、(b) はロボット機構のハンドアームと、これに取り付けたチャック機構を示す外観図である。
【符号の説明】
1…ディスク・ワーク、またはワーク、2…ワーク・カセット、またはカセット、3…ロボット機構、4…ロータリテーブル、5…ロボット機構、5a …ハンドアーム、5b …チャック機構、6…中継台、7…ロボット機構、8…検査装置、9a …変位センサ、9b …基準反射板、10a …パルスモータ、10b …制御回路、10c …メモリ(MEM)。
【特許請求の範囲】
【請求項1】 複数のワーク・カセットを放射状に載置し、パルスモータにより回転するロータリテーブルと、該ロータリテーブルの基準角度データと各前記各ワーク・カセットの角度データを記憶したメモリと、該パルスモータの回転を制御する制御回路、および一定のアクセス位置における前記各ワーク・カセットに対して、ワークをアクセスするロボット機構とを具備した自動供給装置において、該ロボット機構のハンドアームの先端に光学式の変位センサを、前記ロータリテーブルに対して、その半径方向に回転角度の基準を示す基準反射板をそれぞれ設け、前記ロータリテーブルの中心Oを通るX軸を固定側の基準線とし、前記記憶された基準角度データを前記制御回路に与えて前記ロータリテーブルを回転し、該基準反射板を前記X軸に一致させて停止し、前記変位センサをX方向に移動して該基準反射板の両端のY座標値をそれぞれ測定し、測定された両Y座標値の差と該両端間の長さとにより、前記X軸に対する該基準反射板のズレ角度を算出し、該ズレ角度を前記メモリに与えて前記各角度データを較正することを特徴とする、ロータリテーブルの回転角度較正方法。
【請求項1】 複数のワーク・カセットを放射状に載置し、パルスモータにより回転するロータリテーブルと、該ロータリテーブルの基準角度データと各前記各ワーク・カセットの角度データを記憶したメモリと、該パルスモータの回転を制御する制御回路、および一定のアクセス位置における前記各ワーク・カセットに対して、ワークをアクセスするロボット機構とを具備した自動供給装置において、該ロボット機構のハンドアームの先端に光学式の変位センサを、前記ロータリテーブルに対して、その半径方向に回転角度の基準を示す基準反射板をそれぞれ設け、前記ロータリテーブルの中心Oを通るX軸を固定側の基準線とし、前記記憶された基準角度データを前記制御回路に与えて前記ロータリテーブルを回転し、該基準反射板を前記X軸に一致させて停止し、前記変位センサをX方向に移動して該基準反射板の両端のY座標値をそれぞれ測定し、測定された両Y座標値の差と該両端間の長さとにより、前記X軸に対する該基準反射板のズレ角度を算出し、該ズレ角度を前記メモリに与えて前記各角度データを較正することを特徴とする、ロータリテーブルの回転角度較正方法。
【図1】


【図2】
【図2】
【公開番号】特開平5−162051
【公開日】平成5年(1993)6月29日
【国際特許分類】
【出願番号】特願平3−349891
【出願日】平成3年(1991)12月10日
【出願人】(000233480)日立電子エンジニアリング株式会社 (34)
【公開日】平成5年(1993)6月29日
【国際特許分類】
【出願日】平成3年(1991)12月10日
【出願人】(000233480)日立電子エンジニアリング株式会社 (34)
[ Back to top ]