
ロータリーストッパ
【課題】容器6を係合羽根24dに係合させて停止させた際に、後方の容器6からの押し圧によって傷つくことを防止する。
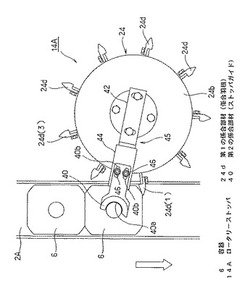
【解決手段】搬送コンベヤ2の3列の搬送レーン2A、2B、2C上を容器6が連続して搬送される。各搬送レーン2A、2B、2Cの側部にそれぞれロータリーストッパ14A、14B、14Cが配置されている。ロータリーストッパ14A、14B、14Cは、フリーな状態で回転するようになっており、この回転を停止させるストッパ機構26が設けられている。回転ホイール24の外周に円周方向等間隔で複数の係合羽根24dが設けられており、前記ストッパ機構26によって回転ホイール24の回転を停止させることにより、係合羽根24dを容器6に係合させて停止させる。さらに、容器6が停止した時にこの容器6の首部6bに係合する第2の係合部材40を設けている。
【解決手段】搬送コンベヤ2の3列の搬送レーン2A、2B、2C上を容器6が連続して搬送される。各搬送レーン2A、2B、2Cの側部にそれぞれロータリーストッパ14A、14B、14Cが配置されている。ロータリーストッパ14A、14B、14Cは、フリーな状態で回転するようになっており、この回転を停止させるストッパ機構26が設けられている。回転ホイール24の外周に円周方向等間隔で複数の係合羽根24dが設けられており、前記ストッパ機構26によって回転ホイール24の回転を停止させることにより、係合羽根24dを容器6に係合させて停止させる。さらに、容器6が停止した時にこの容器6の首部6bに係合する第2の係合部材40を設けている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はロータリーストッパに係り、特に、搬送コンベヤによって搬送中の容器に係合して一時停止させるロータリーストッパに関するものである。
【背景技術】
【0002】
例えば、ケーサにおいて容器を箱詰めする際には、搬送コンベヤによって連続的に搬送されている容器を、所定本数ずつ切り離してグルーピングを行った後、グリッパ等によってこれらグルーピングされた一群の容器を掴んでケース内に収容する。このようなグルーピングを行う際に、同時に箱詰めされる一群の容器と後続の容器とを切り離すために、搬送コンベヤの側部にロータリーストッパを設置した構成が従来から知られている(例えば、特許文献1参照)。
【0003】
前記特許文献1に記載されたロータリーストッパは、容器を連続的に搬送する搬送コンベヤの側部に配置されており、垂直な回転軸に取り付けられた2枚の円盤状プレートが水平面内で回転するようになっている。前記円盤状プレートの外周部には、円周方向等間隔で複数の爪が設けられており、この爪を搬送中の容器に係合させて一時停止させるようにしている。
【特許文献1】特開2006−27873号公報(第4−6頁、図1)
【発明の開示】
【発明が解決しようとする課題】
【0004】
前記特許文献1に記載された従来のロータリーストッパでは、円盤状プレートの外周に形成されている爪にコンベヤによって搬送中の容器を係合させて強制的に停止させると、爪の当たっている容器に後続の容器の押し圧がかかり、ペットボトルのような柔らかい容器では爪の当たっている部分が変形し、傷が付いてしまうという問題があった。また、容器にかかる押し圧を制御しようとすると、その都度コンベヤの作動を制御する必要があり煩雑である。さらに、通常は爪を容器胴部の下部側に係合して停止させるようにしているので、容器の姿勢が不安定になる場合があった。
【課題を解決するための手段】
【0005】
本発明は、容器を連続して搬送する搬送コンベヤの側部に回転可能に配置され、この搬送コンベヤ上に突出して、搬送中の容器の胴部に係合し停止させる第1の係合部材を備えたロータリーストッパにおいて、前記第1の係合部材とともに回転する第2の係合部材を設け、この第2の係合部材を、前記第1の係合部材に係合して停止する容器の首部よりも上方に係合させることを特徴とするものである。
【0006】
また、請求項2に記載した発明は、第2の係合部材が容器の首部外周面に係合することを特徴とするものである。
【発明の効果】
【0007】
本発明のロータリーストッパは、容器の胴部に係合して容器を停止させる第1の係合部材に加えて、容器の首部よりも上方に係合する第2の係合部材を設けたので、容器を停止させた際の後続の容器からの押し圧による胴部の変形を緩和させることができ、しかも、コンベヤ制御が簡単であり、また、停止させた容器が直立した姿勢で安定する等の効果が得られる。
【発明を実施するための最良の形態】
【0008】
容器を連続的に搬送する搬送コンベヤの側部に回転可能に配置され、この搬送コンベヤ上に突出して搬送中の容器に係合する第1の係合部材と、この第1の係合部材とともに回転する第2の係合部材とを備え、第1の係合部材が容器の胴部に係合して容器を停止させる時に、第2の係合部材を、この容器の首部よりも上方に係合させるという構成により、停止した容器が、後続の容器からの押し圧により変形することを防止するという目的を達成する。
【実施例1】
【0009】
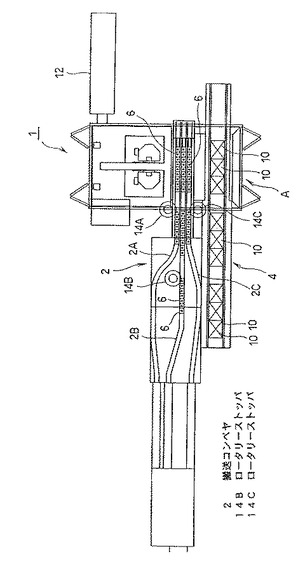
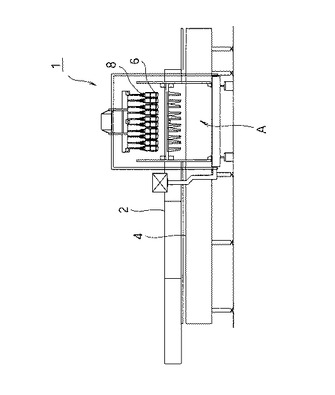
以下、図面に示す実施例により本発明を説明する。図1は本発明の一実施例に係るロータリーストッパを備えたケーサの全体の構成を示す平面図、図2はこのケーサの正面図である。ケーサ(全体として符号1で示す)は、その前面に容器搬送コンベヤ2とケース搬送コンベヤ4とが平行に配置されており、容器搬送コンベヤ2によって搬送されてきた容器6が、ケーサ1の前面のケーシング位置Aに所定本数グルーピングされて停止すると、ケーサ1のボトルグリッパ8がこれらグルーピングされた一群の容器6を同時に把持して、ケース搬送コンベヤ4上に停止しているケース10内に挿入する。図1および図2に示す例では、容器搬送コンベヤ4が3列で容器6を搬送し、各列9本ずつの容器6を一つのグループとして集合させる。これら容器6の停止位置(ケーシング位置A)の前面に配置されたケース搬送コンベヤ4上に3個のケース10が停止し、各ケース10内に、3列×3本ずつの容器6が挿入される。なお、図1中の符号12は、ケーサ1のグリッパ8の作動や、容器搬送コンベヤ2およびケース搬送コンベヤ4の駆動等を制御する制御盤である。
【0010】
容器搬送コンベヤ2は3本の搬送レーン2A、2B、2Cを有しており、各搬送レーン2A、2B、2Cの、前記ケーシング位置Aよりも上流側にそれぞれロータリーストッパ14A、14B、14Cが配置されている。各ロータリーストッパ14A、14B、14Cは、それぞれ搬送レーン2A、2B、2Cを搬送される容器6を停止させることができるようになっており、図1に示す例では、グルーピングされる9本の容器6を通過させた後に、その後続の容器6を停止させる。なお、各搬送レーン2A、2B、2Cの搬送コンベヤ下には、特開2001−335146等に記載されたグルーピング装置が設けられている。
【0011】
図3ないし図6によりこれらロータリーストッパ14A、14B、14Cの構成について説明する。図3は容器搬送コンベヤ2の一本の容器搬送レーン2Aに設けられたロータリーストッパ14Aを示す平面図、図4はこのロータリーストッパ14Aの縦断面図、図5は図4のV−V線に沿う断面図、図6は図4の下方側の部分を示す縦断面図である。なお、容器搬送コンベヤ2の3本の搬送レーン2A、2B、2Cにそれぞれ設けられているロータリーストッパ14A、14B、14Cは、同一の構成なので一つのロータリーストッパ14Aについてだけ説明し、その他のロータリーストッパ14B、14Cの説明は省略する。
【0012】
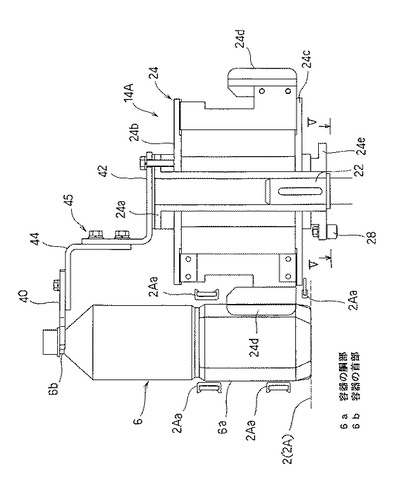
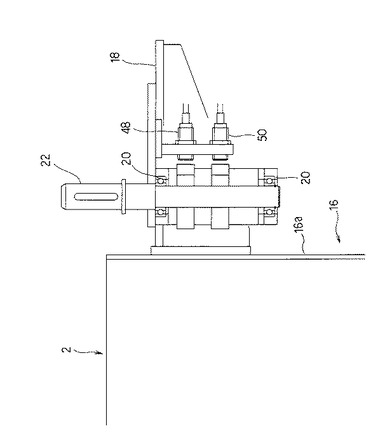
容器搬送コンベヤ2が設けられているフレーム16の側壁16aにブラケット18が固定され(図6参照)、このブラケット18に、上下のベアリング20を介して垂直な回転軸22の下部が回転自在に支持されている。この垂直な回転軸22の上部に回転ホイール24が連結され(図4参照)、垂直回転軸22と一体的に回転する。回転ホイール24は、前記垂直回転軸22の上部外周に嵌合される円筒部材24aと、この円筒部材24aの上下の外周に取り付けられた二枚の円形プレート24b、24cと、これら両円形プレート24b、24cの間に円周方向等間隔で設けられた複数の係合羽根(第1の係合部材)24dとを備えている。図3に示す例では、回転ホイール24の外周に9枚の係合羽根24dが設けられている。各係合羽根24dは、容器搬送コンベヤ2の各搬送レーン2A、2B、2C上を搬送される容器6の胴部6aの下部寄りに係合するようになっており、容器6に当接する側の面が平坦になっている。また、容器搬送コンベヤ2の各搬送レーン2A、2B、2Cには、容器6の胴部6aを案内するガイドレール2Aaが両側に配置されている。このガイドレール2Aaのロータリーストッパ14A側は、前記係合羽根24dに干渉しないように、上下に離隔されて空間が設けられている。
【0013】
回転ホイール24は、通常は、前記ボールベアリング20に回転自在に支持された垂直な回転軸22と一体にフリー回転するようになっており、容器搬送コンベヤ2によって搬送される容器6に係合し、容器6の前進に伴って回転される。この回転ホイール24は間欠的に回転、停止をするようになっており、この実施例では、一回転するごとにストッパ機構26によって一旦停止する。
【0014】
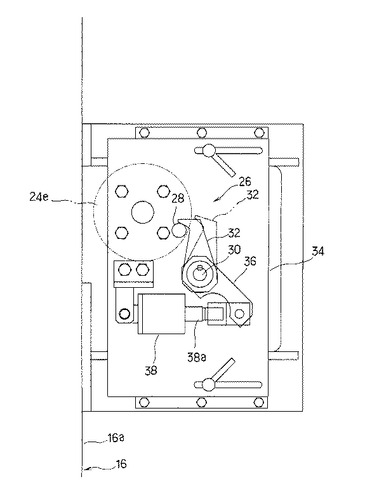
この回転ホイール24を停止させるストッパ機構26について、図4および図5により説明する。前記回転ホイール24の中心に配置されている筒状部材24aの下端に、円板24eが固定され、その外周部に下向きのストッパピン28が取り付けられている(図5参照)。このストッパピン28と同一の平面内に、垂直な支点軸30に固定され、この自転軸30を中心に回動可能なレバー32が配置されている。支点軸30は、前記容器搬送コンベヤ2のフレーム16に固定された水平プレート34に回転自在に支持されており、この支点軸30にリンク36の一端が固定されている。さらに、このリンク36の他端が、前記水平プレート34に固定されたエアシリンダ38のピストンロッド38aに連結されている。エアシリンダ38の作動によりピストンロッド38aが伸張すると、リンク36および支点軸30を介してレバー32が、図5の反時計回り方向に回転して、ストッパピン28に係合可能な状態になり、エアシリンダ38のピストンロッド38aが収縮すると、リンク36および支点軸30を介してレバー32が図5の時計回り方向に回転してストッパピン28との係合が外れる。
【0015】
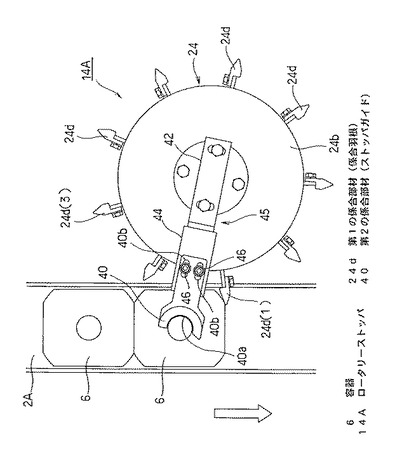
前記回転ホイール24の上部に、前記ストッパ機構26によって回転ホイール24が停止し、一枚の係合羽根24dが搬送コンベヤ2上の容器6を停止させた時に、その容器6の首部6bに係合して容器6を停止させる第2の係合部材(ストッパガイド)40が設けられている。前記回転ホイール24の円筒部材24a上に固定されたL字状プレート42に、さらに、逆方向を向けた第2のL字状プレート44が固定されて一体の取り付けプレート45が形成されており、この取り付けプレート45の上端の水平部に、ストッパガイド40が固定されている。このストッパガイド40は、先端に容器6の首部6bの外径よりもやや大きい内径の半円形凹部40aが形成されており、この半円形凹部40a内に容器6の首部6bを受け入れて容器6を停止させる。ストッパガイド40の基部側には2本の長孔40bが形成されており、これら長孔40bにボルト46を締め付けてストッパガイド40を前記取り付けプレート45に固定している。このボルト46を緩めて長孔40b内で相対的に移動させることにより、容器6とストッパガイド40との間隔を調整できるようになっている。なお、容器6に応じて、ストッパガイド40の高さおよび角度も調整可能である。
【0016】
回転ホイール24が取り付けられている垂直回転軸22の下部側に、回転ホイール24の回転を検出する2つのセンサー48、50が設けられている。図6の上方のセンサー48は、減速位置検出用センサーであり、レバー駆動位置検出用も兼用している。例えば、容器6を停止させる係合羽根24d(図3中に符号24d(1)で示す係合羽根参照)が、二つ後方側の係合羽根24dの位置(図3中に符号24d(3)で示す位置)に到達したことを検出する。この減速位置検出用センサー48が、容器6を停止させる係合羽根24dが前記位置24d(3)に到達したことを検出すると、容器搬送コンベヤ2の、このロータリーストッパ14Aが設けられている搬送レーン2Aが減速されるとともに、前記ストッパ機構26のエアシリンダ38が作動してピストンロッド38aを伸張させ、レバー32をストッパピン28に係合する位置に回転させる。また、下側のセンサー50は、定位置での停止確認用センサーであり、このセンサー50が、所定の係合羽根24dが容器6を停止させる位置(図3中に符号24d(1)で示す位置)に停止していることを検出するために設けられる。
【0017】
以上の構成に係るロータリーストッパ14A、14B、14Cの作動について説明する。容器搬送コンベヤ2の各搬送レーン2A、2B、2Cを前後に密着した状態で連続的に搬送されてきた容器6は、各搬送レーン2A、2B、2Cの側部に設けられているロータリーストッパ14A、14B、14Cの係合羽根24dに当たり、この係合羽根24dを押しながら前進する。係合羽根24dが設けられている回転ホイール24はフリーに回転できる状態になっており、係合羽根24dが前進する容器6に押されることにより回転する。図3に示すように、回転ホイール24の外周には、9個の係合羽根24dが設けられており、各係合羽根24dに容器6が1個ずつ当接し、回転ホイール24を回転させつつこのロータリーストッパ14A、14B、14Cを通過する。
【0018】
回転ホイール24の下面には、ストッパ機構26を構成するストッパピン28が設けられており、回転ホイール24が一回転するごとに、このストッパピン28にレバー32が噛み合うことにより停止する。この実施例では、回転ホイール24を停止させる前に、容器搬送コンベヤ2を減速するようになっており、減速位置用センサー48が、容器6を停止させる係合羽根24dが所定の位置(この実施例では図3の24d(3)に示す位置)に到達したことを検出すると、このセンサー48からの信号に応じて、前記制御盤12が容器搬送コンベヤ2に減速指令を出力し、各搬送レーン2A、2B、2Cを減速する。また、このセンサー48からの信号が入力された前記制御盤12からの指令によりエアシリンダ38が作動して、ピストンロッド38aを伸張させ、レバー32を図5の反時計回り方向に回転させる。その後、回転ホイール24がさらに回転して、前記係合羽根24dが容器6を停止させる位置(図3の24d(1)に示す位置)に到達すると、ストッパピン28がレバー32に係止され、回転ホイール24の回転が停止し、搬送コンベヤ2上の容器6の進行を停止させる。図3に示す構成のロータリーストッパ14Aでは、9個の容器6を通過させるごとに回転ホイール24が停止して容器6の前進を止める。なお、この実施例では、容器6を停止させた際にも、容器搬送コンベヤ2は低速で走行している。
【0019】
前記ロータリーストッパの係合羽根(第1の係合部材)24dが、胴部6aに係合して停止された容器6は、前記回転ホイール24の上部に取り付けられているストッパガイド40の凹部40aが首部6bに嵌り込むことによって、胴部6aと首部6bとを同時に保持されて停止するので、後方の容器6からの押し圧によって停止している容器6の胴部6aに傷が付くおそれがない。特に、首部6bは容器6の最も強度のある部分なので、確実に容器6を保持することができ、容器6の傷付きを防止することができる。しかも、容器6を安定した直立姿勢で停止させることができる。
【実施例2】
【0020】
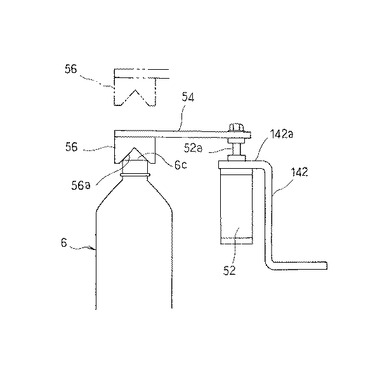
図7は第2の実施例に係るロータリーストッパの第2の係合部材を示す図であり、その他の部分は前記第1実施例と同一の構成なのでその説明を省略する。この実施例では、前記回転ホイール24上に固定した2枚のL字状プレート42、44を組み合わせた取り付けプレート45とほぼ同一の形状を有するプレート142を、回転ホイール24上に固定し、その上方の水平部142aに、エアシリンダ52を上方を向けて取り付けてある。そして、このエアシリンダ52のピストンロッド52aに、水平な昇降プレート54を介して第2の係合部材56を固定してあり、エアシリンダ52の作動によりこの第2の係合部材56が昇降する。第2の係合部材56は、下面側にV字状の溝56aが形成されており、エアシリンダ52によって第2の係合部材56を下降させて、このV字状溝56aの両側斜面を容器6の口部6cに押し付けることにより容器搬送コンベヤ2上の容器6を停止させることができる。この実施例でも、前記第1実施例のロータリーストッパ14A、14B、14Cに設けられている第1の係合部材24dと同様の係合部材と、この第2の係合部材56との両者によって、容器搬送コンベヤ2の搬送レーン2A、2B、2C上の容器6を停止させることにより、第1の係合部材24dによって容器6の胴部6aに加えられる負荷を軽減して、容器6の胴部6aが傷付くことを防止することができる。
【図面の簡単な説明】
【0021】
【図1】本発明の一実施例に係るロータリーストッパを備えたケーサの全体の構成を示す平面図である。(実施例1)
【図2】前記ケーサの正面図である。
【図3】ロータリーストッパの平面図である。
【図4】ロータリーストッパの縦断面図である。
【図5】図4のV−V線に沿う断面図である。
【図6】図4の垂直回転軸の下部を示す図である。
【図7】第2の係合部材を示す図である。(実施例2)
【符号の説明】
【0022】
2 搬送コンベヤ
6 容器
6a 容器の胴部
6b 容器の首部
14A ロータリーストッパ
14B ロータリーストッパ
14C ロータリーストッパ
24d 第1の係合部材(係合羽根)
40 第2の係合部材(ストッパガイド)
【技術分野】
【0001】
本発明はロータリーストッパに係り、特に、搬送コンベヤによって搬送中の容器に係合して一時停止させるロータリーストッパに関するものである。
【背景技術】
【0002】
例えば、ケーサにおいて容器を箱詰めする際には、搬送コンベヤによって連続的に搬送されている容器を、所定本数ずつ切り離してグルーピングを行った後、グリッパ等によってこれらグルーピングされた一群の容器を掴んでケース内に収容する。このようなグルーピングを行う際に、同時に箱詰めされる一群の容器と後続の容器とを切り離すために、搬送コンベヤの側部にロータリーストッパを設置した構成が従来から知られている(例えば、特許文献1参照)。
【0003】
前記特許文献1に記載されたロータリーストッパは、容器を連続的に搬送する搬送コンベヤの側部に配置されており、垂直な回転軸に取り付けられた2枚の円盤状プレートが水平面内で回転するようになっている。前記円盤状プレートの外周部には、円周方向等間隔で複数の爪が設けられており、この爪を搬送中の容器に係合させて一時停止させるようにしている。
【特許文献1】特開2006−27873号公報(第4−6頁、図1)
【発明の開示】
【発明が解決しようとする課題】
【0004】
前記特許文献1に記載された従来のロータリーストッパでは、円盤状プレートの外周に形成されている爪にコンベヤによって搬送中の容器を係合させて強制的に停止させると、爪の当たっている容器に後続の容器の押し圧がかかり、ペットボトルのような柔らかい容器では爪の当たっている部分が変形し、傷が付いてしまうという問題があった。また、容器にかかる押し圧を制御しようとすると、その都度コンベヤの作動を制御する必要があり煩雑である。さらに、通常は爪を容器胴部の下部側に係合して停止させるようにしているので、容器の姿勢が不安定になる場合があった。
【課題を解決するための手段】
【0005】
本発明は、容器を連続して搬送する搬送コンベヤの側部に回転可能に配置され、この搬送コンベヤ上に突出して、搬送中の容器の胴部に係合し停止させる第1の係合部材を備えたロータリーストッパにおいて、前記第1の係合部材とともに回転する第2の係合部材を設け、この第2の係合部材を、前記第1の係合部材に係合して停止する容器の首部よりも上方に係合させることを特徴とするものである。
【0006】
また、請求項2に記載した発明は、第2の係合部材が容器の首部外周面に係合することを特徴とするものである。
【発明の効果】
【0007】
本発明のロータリーストッパは、容器の胴部に係合して容器を停止させる第1の係合部材に加えて、容器の首部よりも上方に係合する第2の係合部材を設けたので、容器を停止させた際の後続の容器からの押し圧による胴部の変形を緩和させることができ、しかも、コンベヤ制御が簡単であり、また、停止させた容器が直立した姿勢で安定する等の効果が得られる。
【発明を実施するための最良の形態】
【0008】
容器を連続的に搬送する搬送コンベヤの側部に回転可能に配置され、この搬送コンベヤ上に突出して搬送中の容器に係合する第1の係合部材と、この第1の係合部材とともに回転する第2の係合部材とを備え、第1の係合部材が容器の胴部に係合して容器を停止させる時に、第2の係合部材を、この容器の首部よりも上方に係合させるという構成により、停止した容器が、後続の容器からの押し圧により変形することを防止するという目的を達成する。
【実施例1】
【0009】
以下、図面に示す実施例により本発明を説明する。図1は本発明の一実施例に係るロータリーストッパを備えたケーサの全体の構成を示す平面図、図2はこのケーサの正面図である。ケーサ(全体として符号1で示す)は、その前面に容器搬送コンベヤ2とケース搬送コンベヤ4とが平行に配置されており、容器搬送コンベヤ2によって搬送されてきた容器6が、ケーサ1の前面のケーシング位置Aに所定本数グルーピングされて停止すると、ケーサ1のボトルグリッパ8がこれらグルーピングされた一群の容器6を同時に把持して、ケース搬送コンベヤ4上に停止しているケース10内に挿入する。図1および図2に示す例では、容器搬送コンベヤ4が3列で容器6を搬送し、各列9本ずつの容器6を一つのグループとして集合させる。これら容器6の停止位置(ケーシング位置A)の前面に配置されたケース搬送コンベヤ4上に3個のケース10が停止し、各ケース10内に、3列×3本ずつの容器6が挿入される。なお、図1中の符号12は、ケーサ1のグリッパ8の作動や、容器搬送コンベヤ2およびケース搬送コンベヤ4の駆動等を制御する制御盤である。
【0010】
容器搬送コンベヤ2は3本の搬送レーン2A、2B、2Cを有しており、各搬送レーン2A、2B、2Cの、前記ケーシング位置Aよりも上流側にそれぞれロータリーストッパ14A、14B、14Cが配置されている。各ロータリーストッパ14A、14B、14Cは、それぞれ搬送レーン2A、2B、2Cを搬送される容器6を停止させることができるようになっており、図1に示す例では、グルーピングされる9本の容器6を通過させた後に、その後続の容器6を停止させる。なお、各搬送レーン2A、2B、2Cの搬送コンベヤ下には、特開2001−335146等に記載されたグルーピング装置が設けられている。
【0011】
図3ないし図6によりこれらロータリーストッパ14A、14B、14Cの構成について説明する。図3は容器搬送コンベヤ2の一本の容器搬送レーン2Aに設けられたロータリーストッパ14Aを示す平面図、図4はこのロータリーストッパ14Aの縦断面図、図5は図4のV−V線に沿う断面図、図6は図4の下方側の部分を示す縦断面図である。なお、容器搬送コンベヤ2の3本の搬送レーン2A、2B、2Cにそれぞれ設けられているロータリーストッパ14A、14B、14Cは、同一の構成なので一つのロータリーストッパ14Aについてだけ説明し、その他のロータリーストッパ14B、14Cの説明は省略する。
【0012】
容器搬送コンベヤ2が設けられているフレーム16の側壁16aにブラケット18が固定され(図6参照)、このブラケット18に、上下のベアリング20を介して垂直な回転軸22の下部が回転自在に支持されている。この垂直な回転軸22の上部に回転ホイール24が連結され(図4参照)、垂直回転軸22と一体的に回転する。回転ホイール24は、前記垂直回転軸22の上部外周に嵌合される円筒部材24aと、この円筒部材24aの上下の外周に取り付けられた二枚の円形プレート24b、24cと、これら両円形プレート24b、24cの間に円周方向等間隔で設けられた複数の係合羽根(第1の係合部材)24dとを備えている。図3に示す例では、回転ホイール24の外周に9枚の係合羽根24dが設けられている。各係合羽根24dは、容器搬送コンベヤ2の各搬送レーン2A、2B、2C上を搬送される容器6の胴部6aの下部寄りに係合するようになっており、容器6に当接する側の面が平坦になっている。また、容器搬送コンベヤ2の各搬送レーン2A、2B、2Cには、容器6の胴部6aを案内するガイドレール2Aaが両側に配置されている。このガイドレール2Aaのロータリーストッパ14A側は、前記係合羽根24dに干渉しないように、上下に離隔されて空間が設けられている。
【0013】
回転ホイール24は、通常は、前記ボールベアリング20に回転自在に支持された垂直な回転軸22と一体にフリー回転するようになっており、容器搬送コンベヤ2によって搬送される容器6に係合し、容器6の前進に伴って回転される。この回転ホイール24は間欠的に回転、停止をするようになっており、この実施例では、一回転するごとにストッパ機構26によって一旦停止する。
【0014】
この回転ホイール24を停止させるストッパ機構26について、図4および図5により説明する。前記回転ホイール24の中心に配置されている筒状部材24aの下端に、円板24eが固定され、その外周部に下向きのストッパピン28が取り付けられている(図5参照)。このストッパピン28と同一の平面内に、垂直な支点軸30に固定され、この自転軸30を中心に回動可能なレバー32が配置されている。支点軸30は、前記容器搬送コンベヤ2のフレーム16に固定された水平プレート34に回転自在に支持されており、この支点軸30にリンク36の一端が固定されている。さらに、このリンク36の他端が、前記水平プレート34に固定されたエアシリンダ38のピストンロッド38aに連結されている。エアシリンダ38の作動によりピストンロッド38aが伸張すると、リンク36および支点軸30を介してレバー32が、図5の反時計回り方向に回転して、ストッパピン28に係合可能な状態になり、エアシリンダ38のピストンロッド38aが収縮すると、リンク36および支点軸30を介してレバー32が図5の時計回り方向に回転してストッパピン28との係合が外れる。
【0015】
前記回転ホイール24の上部に、前記ストッパ機構26によって回転ホイール24が停止し、一枚の係合羽根24dが搬送コンベヤ2上の容器6を停止させた時に、その容器6の首部6bに係合して容器6を停止させる第2の係合部材(ストッパガイド)40が設けられている。前記回転ホイール24の円筒部材24a上に固定されたL字状プレート42に、さらに、逆方向を向けた第2のL字状プレート44が固定されて一体の取り付けプレート45が形成されており、この取り付けプレート45の上端の水平部に、ストッパガイド40が固定されている。このストッパガイド40は、先端に容器6の首部6bの外径よりもやや大きい内径の半円形凹部40aが形成されており、この半円形凹部40a内に容器6の首部6bを受け入れて容器6を停止させる。ストッパガイド40の基部側には2本の長孔40bが形成されており、これら長孔40bにボルト46を締め付けてストッパガイド40を前記取り付けプレート45に固定している。このボルト46を緩めて長孔40b内で相対的に移動させることにより、容器6とストッパガイド40との間隔を調整できるようになっている。なお、容器6に応じて、ストッパガイド40の高さおよび角度も調整可能である。
【0016】
回転ホイール24が取り付けられている垂直回転軸22の下部側に、回転ホイール24の回転を検出する2つのセンサー48、50が設けられている。図6の上方のセンサー48は、減速位置検出用センサーであり、レバー駆動位置検出用も兼用している。例えば、容器6を停止させる係合羽根24d(図3中に符号24d(1)で示す係合羽根参照)が、二つ後方側の係合羽根24dの位置(図3中に符号24d(3)で示す位置)に到達したことを検出する。この減速位置検出用センサー48が、容器6を停止させる係合羽根24dが前記位置24d(3)に到達したことを検出すると、容器搬送コンベヤ2の、このロータリーストッパ14Aが設けられている搬送レーン2Aが減速されるとともに、前記ストッパ機構26のエアシリンダ38が作動してピストンロッド38aを伸張させ、レバー32をストッパピン28に係合する位置に回転させる。また、下側のセンサー50は、定位置での停止確認用センサーであり、このセンサー50が、所定の係合羽根24dが容器6を停止させる位置(図3中に符号24d(1)で示す位置)に停止していることを検出するために設けられる。
【0017】
以上の構成に係るロータリーストッパ14A、14B、14Cの作動について説明する。容器搬送コンベヤ2の各搬送レーン2A、2B、2Cを前後に密着した状態で連続的に搬送されてきた容器6は、各搬送レーン2A、2B、2Cの側部に設けられているロータリーストッパ14A、14B、14Cの係合羽根24dに当たり、この係合羽根24dを押しながら前進する。係合羽根24dが設けられている回転ホイール24はフリーに回転できる状態になっており、係合羽根24dが前進する容器6に押されることにより回転する。図3に示すように、回転ホイール24の外周には、9個の係合羽根24dが設けられており、各係合羽根24dに容器6が1個ずつ当接し、回転ホイール24を回転させつつこのロータリーストッパ14A、14B、14Cを通過する。
【0018】
回転ホイール24の下面には、ストッパ機構26を構成するストッパピン28が設けられており、回転ホイール24が一回転するごとに、このストッパピン28にレバー32が噛み合うことにより停止する。この実施例では、回転ホイール24を停止させる前に、容器搬送コンベヤ2を減速するようになっており、減速位置用センサー48が、容器6を停止させる係合羽根24dが所定の位置(この実施例では図3の24d(3)に示す位置)に到達したことを検出すると、このセンサー48からの信号に応じて、前記制御盤12が容器搬送コンベヤ2に減速指令を出力し、各搬送レーン2A、2B、2Cを減速する。また、このセンサー48からの信号が入力された前記制御盤12からの指令によりエアシリンダ38が作動して、ピストンロッド38aを伸張させ、レバー32を図5の反時計回り方向に回転させる。その後、回転ホイール24がさらに回転して、前記係合羽根24dが容器6を停止させる位置(図3の24d(1)に示す位置)に到達すると、ストッパピン28がレバー32に係止され、回転ホイール24の回転が停止し、搬送コンベヤ2上の容器6の進行を停止させる。図3に示す構成のロータリーストッパ14Aでは、9個の容器6を通過させるごとに回転ホイール24が停止して容器6の前進を止める。なお、この実施例では、容器6を停止させた際にも、容器搬送コンベヤ2は低速で走行している。
【0019】
前記ロータリーストッパの係合羽根(第1の係合部材)24dが、胴部6aに係合して停止された容器6は、前記回転ホイール24の上部に取り付けられているストッパガイド40の凹部40aが首部6bに嵌り込むことによって、胴部6aと首部6bとを同時に保持されて停止するので、後方の容器6からの押し圧によって停止している容器6の胴部6aに傷が付くおそれがない。特に、首部6bは容器6の最も強度のある部分なので、確実に容器6を保持することができ、容器6の傷付きを防止することができる。しかも、容器6を安定した直立姿勢で停止させることができる。
【実施例2】
【0020】
図7は第2の実施例に係るロータリーストッパの第2の係合部材を示す図であり、その他の部分は前記第1実施例と同一の構成なのでその説明を省略する。この実施例では、前記回転ホイール24上に固定した2枚のL字状プレート42、44を組み合わせた取り付けプレート45とほぼ同一の形状を有するプレート142を、回転ホイール24上に固定し、その上方の水平部142aに、エアシリンダ52を上方を向けて取り付けてある。そして、このエアシリンダ52のピストンロッド52aに、水平な昇降プレート54を介して第2の係合部材56を固定してあり、エアシリンダ52の作動によりこの第2の係合部材56が昇降する。第2の係合部材56は、下面側にV字状の溝56aが形成されており、エアシリンダ52によって第2の係合部材56を下降させて、このV字状溝56aの両側斜面を容器6の口部6cに押し付けることにより容器搬送コンベヤ2上の容器6を停止させることができる。この実施例でも、前記第1実施例のロータリーストッパ14A、14B、14Cに設けられている第1の係合部材24dと同様の係合部材と、この第2の係合部材56との両者によって、容器搬送コンベヤ2の搬送レーン2A、2B、2C上の容器6を停止させることにより、第1の係合部材24dによって容器6の胴部6aに加えられる負荷を軽減して、容器6の胴部6aが傷付くことを防止することができる。
【図面の簡単な説明】
【0021】
【図1】本発明の一実施例に係るロータリーストッパを備えたケーサの全体の構成を示す平面図である。(実施例1)
【図2】前記ケーサの正面図である。
【図3】ロータリーストッパの平面図である。
【図4】ロータリーストッパの縦断面図である。
【図5】図4のV−V線に沿う断面図である。
【図6】図4の垂直回転軸の下部を示す図である。
【図7】第2の係合部材を示す図である。(実施例2)
【符号の説明】
【0022】
2 搬送コンベヤ
6 容器
6a 容器の胴部
6b 容器の首部
14A ロータリーストッパ
14B ロータリーストッパ
14C ロータリーストッパ
24d 第1の係合部材(係合羽根)
40 第2の係合部材(ストッパガイド)
【特許請求の範囲】
【請求項1】
容器を連続して搬送する搬送コンベヤの側部に回転可能に配置され、この搬送コンベヤ上に突出して、搬送中の容器の胴部に係合し停止させる第1の係合部材を備えたロータリーストッパにおいて、
前記第1の係合部材とともに回転する第2の係合部材を設け、この第2の係合部材を、前記第1の係合部材に係合して停止する容器の首部よりも上方に係合させることを特徴とするロータリーストッパ。
【請求項2】
第2の係合部材が容器の首部外周面に係合することを特徴とする請求項1に記載のロータリーストッパ。
【請求項1】
容器を連続して搬送する搬送コンベヤの側部に回転可能に配置され、この搬送コンベヤ上に突出して、搬送中の容器の胴部に係合し停止させる第1の係合部材を備えたロータリーストッパにおいて、
前記第1の係合部材とともに回転する第2の係合部材を設け、この第2の係合部材を、前記第1の係合部材に係合して停止する容器の首部よりも上方に係合させることを特徴とするロータリーストッパ。
【請求項2】
第2の係合部材が容器の首部外周面に係合することを特徴とする請求項1に記載のロータリーストッパ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2008−19018(P2008−19018A)
【公開日】平成20年1月31日(2008.1.31)
【国際特許分類】
【出願番号】特願2006−190315(P2006−190315)
【出願日】平成18年7月11日(2006.7.11)
【出願人】(000001904)サントリー株式会社 (319)
【Fターム(参考)】
【公開日】平成20年1月31日(2008.1.31)
【国際特許分類】
【出願日】平成18年7月11日(2006.7.11)
【出願人】(000001904)サントリー株式会社 (319)
【Fターム(参考)】
[ Back to top ]