
ロータリ耕耘方法
【課題】ロータリ耕耘装置において、構成を簡単化しながら、正転耕耘で平面状に耕耘し、逆転耕耘で大きな畦を形成する。
【解決手段】ロータリ耕耘装置(17)の伝動ケース(40)の下部左右両側にロータリ軸(41)を突出し該軸(41)を正回転又は逆回転に切り換える切換操作部を備え、上記ロータリ軸(41)又は該ロータリ軸(41)と一体的に連結する連結軸(51,51)に正逆用耕耘爪(54)を取付け、ロータリ軸(41)の正転、逆転の切り換えによって普通耕耘か畝立作業かを選択するロータリ耕耘方法とする。
【解決手段】ロータリ耕耘装置(17)の伝動ケース(40)の下部左右両側にロータリ軸(41)を突出し該軸(41)を正回転又は逆回転に切り換える切換操作部を備え、上記ロータリ軸(41)又は該ロータリ軸(41)と一体的に連結する連結軸(51,51)に正逆用耕耘爪(54)を取付け、ロータリ軸(41)の正転、逆転の切り換えによって普通耕耘か畝立作業かを選択するロータリ耕耘方法とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ロータリ耕耘方法に関する。特に、機体後部の伝動ケースの左右両側へ設けたロータリ軸を正逆転切替可能に構成し、この軸にロータリ耕耘装置の正逆用耕耘爪を装着もので、歩行型耕耘機のロータリ耕耘装置に利用できる。
【背景技術】
【0002】
特許文献1で示す如く、ロータリ耕耘装置の伝動ケースの左右両側へ突出させて設けた第一ロータリ軸には、第一耕耘爪を装着して設け、又、各第一ロータリ軸の外径部へ設けた、各第二ロータリ軸には、第二耕耘爪と、グローブ爪とを装着した構成がある。このグローブ爪は、正面視左右略対称形状で、ロータリ軸が正転し、又は逆転する構成のいずれにも打ち込み作用を具備するものである。このグローブ爪は、側面視において第二ロータリ軸への取付位置近傍で、一方側へ向けて湾曲し、かつ先端部が他方側へ向けて湾曲し、これら両湾曲部の間で耕耘した土を抱き込み可能な凹部を形成した構成であり、第二ロータリ軸へ装着するグローブ爪の凹部を外側へ向けて装着した構成である。
【0003】
例えば、内側部の前記第二耕耘爪とグローブ爪とは、正転では、このグローブ爪の凹状部で多くの耕耘土を抱き込み、この多量の土を遠心力により、外側の逆転する第一耕耘爪で耕耘した耕耘部へ補充することができ、耕耘後の耕地状態を耕耘巾の全面に亘って均等化している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第3279931号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
ロータリ耕耘装置の各第一耕耘爪と、各第二耕耘爪と、各グローブ爪とにより、耕耘作業を行うときと、畝立耕耘作業を行うときとでは、これら各爪の取付け方向を組換えする必要がある。すなわち、普通耕耘するときは、先端に向けて湾曲する爪をこの先端部が中央の伝動ケースに向かう方向に取り付けてロータリ軸を正回転させることによって左右方向に略平らな耕土面を得ることができ、畝立作業を行うときは、湾曲方向が逆向きに取りつけかつロータリ軸を逆回転に連動することによって中央伝動ケースから耕土が左右に跳ね上げられるようになすが、正逆用耕耘爪といえども湾曲方向を転換すべく組み換えが必要で、この組換えに時間と、手間とが必要であったが、この発明により、これらの課題を解決しようとするものである。
【課題を解決するための手段】
【0006】
このためこの発明は次の技術的手段を講じた。
すなわち、請求項1に記載の発明は、ロータリ耕耘装置(17)の伝動ケース(40)の下部左右両側にロータリ軸(41)を突出し該軸(41)を正回転又は逆回転に切り換える切換操作部を備え、上記ロータリ軸(41)又は該ロータリ軸(41)と一体的に連結する連結軸(51,51)に正逆用耕耘爪(54)を取付け、ロータリ軸(41)の正転、逆転の切り換えによって普通耕耘か畝立作業かを選択するロータリ耕耘方法とする。
【0007】
正転中、正逆用耕耘爪(54)の打ち込みで土壌は耕耘される。該爪は耕耘土を内・外方に偏らせることなく万遍に分布させる。また、逆転では、耕耘土を伝動ケース(40)から遠ざかるように跳ね上げて往復隣接耕耘によって所定の畝を形成することができる。
【発明の効果】
【0008】
請求項1に記載の発明においては、正転中、正逆用耕耘爪(54)の打ち込みで土壌は耕耘され、耕耘土を内・外方に偏らせることなく万遍に分布させ、また、逆転では、耕耘土を伝動ケース(40)から遠ざかるように跳ね上げて往復隣接耕耘にによって所定の畝を形成することができる。したがって、ロータリ軸(41)の正転、逆転の切り換えを行うだけで普通耕耘か畝立作業かを選択でき、切り換え操作が簡単である。
【図面の簡単な説明】
【0009】
【図1】第1実施例のロータリ耕耘装置部の拡大背面図
【図2】ロータリ耕耘装置部の拡大背面図(イ)、その一部の拡大断面図(ロ)
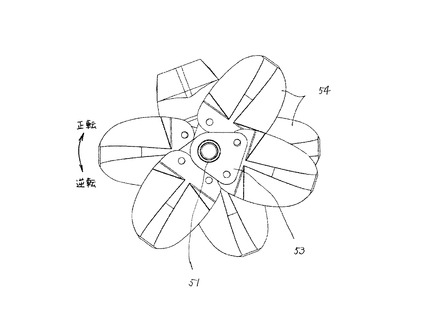
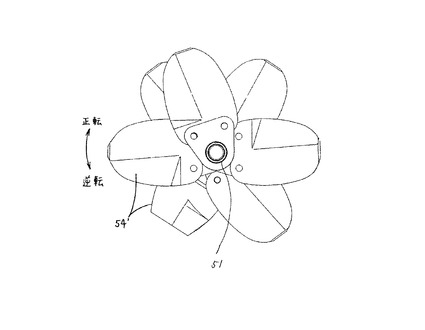
【図3】ロータリ耕耘装置部の左側部の拡大側面図
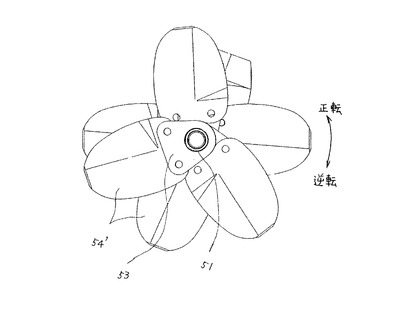
【図4】ロータリ耕耘装置部の右側部の拡大側面図
【図5】ロータリ耕耘装置部の左側部の拡大側面図
【図6】ロータリ耕耘装置部の右側部の拡大側面図
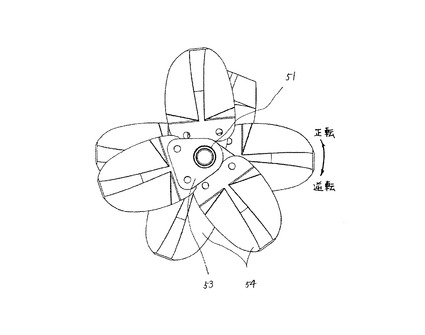
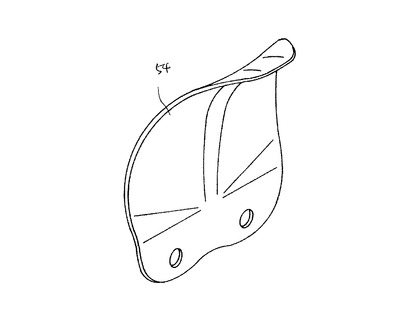
【図7】正逆回転爪の拡大側面図
【図8】従来の正逆回転爪の拡大側面図
【図9】第2実施例における伝動ケース部の拡大背断面図
【図10】同上のロータリ耕耘装置部の拡大背面図
【図11】デフ機構部拡大平面図
【図12】歩行型耕耘機の左側全体側面図
【図13】他の実施例を示す図で、伝動ケース部の拡大背断面図
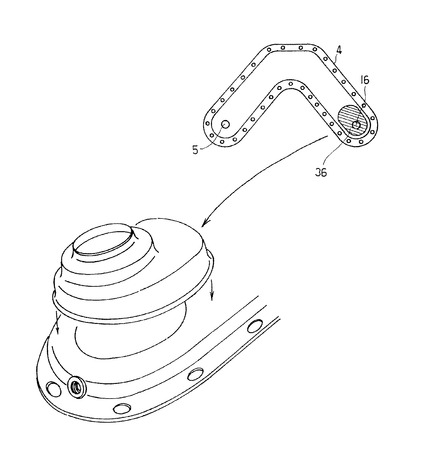
【図14】他の実施例を示す図で、分割型の伝動ケースの側面図
【図15】他の実施例を示す図で、分割型の伝動ケースの拡大側面図
【図16】他の実施例を示す図で、分割型の伝動ケースの拡大側面図
【発明を実施するための最良の形態】
【0010】
以下、本発明の一実施例を図面に基づいて説明する。
歩行型耕耘機1の全体構成について説明する。
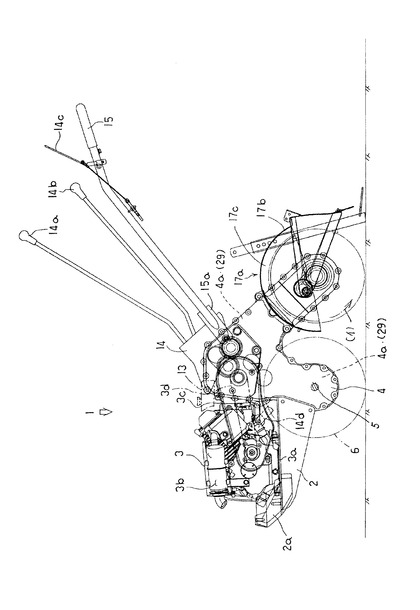
前記歩行型耕耘機1は、図12で示す如く機体1a前部にエンジン取付フレーム2を設け、このエンジン取付フレーム2の前部には、バンパー2aを設けると共に、上側面には、プレート部材3aを掛け渡して、エンジン3を載置した構成である。このエンジン3の後側でエンジン取付フレーム2の後側には、側面視略へ字形状の伝動ケース4を装着して設けると共に、上部には、燃料タンク13を設ける。上記エンジン3を駆動し、このエンジン3の回転動力を伝動ケース4の一方側の前側のへ字状部へ内装した伝動機構4aの左右両側の車軸5には、左右一対の走行輪6を軸支して設けた構成である。
【0011】
又、前記伝動ケース4他方側の後側のへの字状部へ内装した伝動機構4aの左右両側で、伝動ケース4から突出するロータリ軸16には、ロータリ耕耘装置17の正逆用耕耘爪18を装着した耕耘爪外パイプ装置19を延長状態に、耕耘爪内パイプ装置20を2重筒軸状態に軸支して設けた構成である。
【0012】
又、前記エンジン3の側部には、マフラー3b、及びベルトケース3cを設け、このベルトケース3c内の伝動ベルト3dを介して、エンジン3の回転動力を伝動ケース4へ内装した前後の伝動機構4aの入力軸4bへ伝達する構成である。
【0013】
又、前記伝動ケース4の上側には、図12で示す如く操作ケース14を装着して設け、この操作ケース14には、走行車速を変速操作する走行レバー14aと、ロータリ耕耘装置17を変速操作する耕耘レバー14bとを設けた構成である。更に、操作ケース14の下側で、伝動ケース4には、基部へ取付板15aを設けたハンドル15を装着した構成である。ハンドル15には、クラッチレバー14cを設け、このクラッチレバー14cの「入」−「切」操作に連動して、伝動ベルト3dへ設けたテンションクラッチ装置14dが「入」−「切」操作され、歩行型耕耘機1が走行、又は停止する構成である。
【0014】
次に、図9で示す如く伝動ケース4の一方側である前側のへ字状部ケースに内装した走行用の伝動機構4aから下端部へ軸支した車軸5への伝動構成について説明する。左右両側のへ字形状の伝動ケース4をボルト、及びナット等で装着して一体に形成した構成であり、この一体に形成された伝動ケース4内へ走行用の伝動機構4aを内装して設けた構成である。
【0015】
前記伝動ケース4の前側の走行用の伝動機構4aは、図9で示す如くこの伝動機構4aの上部には、入力軸4bを軸支して設け、一方側の軸端部は、伝動ケース4から突出させて設け、この突出した先端部には、入力プーリ4cを軸支して設け、この入力プーリ4cへエンジン3から掛け渡した伝動ベルト3dにより、エンジン3の回転動力を入力して、伝動機構4aを回転駆動する構成である。
【0016】
前記入力軸4bと併設する変速軸4dを軸支して設けると共に、伝動上手側から第一軸4eと、第二軸4fと、デフ機構7とを設け、このデフ機構7には、左右両側へ伝動ケース4から突出させて車軸5,5を軸支して設け、これら各車軸5には、個別に走行輪6を軸支して設けた構成である。
【0017】
前記入力軸4bの一方側の端部には、大・中・小三段ギャー8a,8b,8cを有するスライドギャー8を軸支して設け、又、変速軸4dには、大・小二段ギャー9a,9bを有するカウンタ軸9を回転自在に軸支した構成である。更に、第一軸4eには、平ギャー10a、及び第二軸4fの平ギャー11aと常時噛合するスプラインギャー10bを軸支した構成である。第二軸4fからデフ機構7へはチェン12を介して常時伝動する構成である。
【0018】
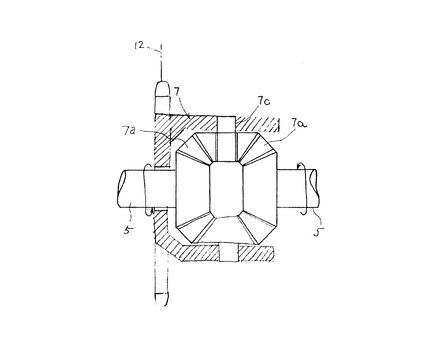
前記デフ機構7は、図11で示す如く左・右ベベルギャー7a,7bを上下一方からだけのピニオンギャー7cにて駆動する構成である。
前記走行用の伝動機構4aでは、走行レバー14aを左右に操作すると、変速用シフタの動きを介して、スライドギャー8を入力軸4b上でスライドさせる。そして、スライドギャー8を伝動ケース4の中央部へ位置させたときには、スライドギャー8の大三段ギャー8aがカウンタ軸9の大二段ギャー9aに噛合して、「第二速」となり、入力軸4bの回転は、順次この入力軸4b、スライドギャー8上の大三段ギャー8a、カウンタ軸9上の大二段ギャー9a、カウンタ軸9、このカウンタ軸9上の小二段ギャー9b、第一軸4eの平ギャー10aとへ伝達され、更に、第一軸4eのスプラインギャー10b、第二軸4fの平ギャー11a、第二軸4f、チェン12とへ伝達され、デフ機構7、車軸5,5とへ伝達される構成である。
【0019】
又、前記スライドギャー8をやや右側(図中実線部)に位置させると、中三段ギャー8bと、第一軸4e軸上の平ギャー10aとが噛合され、「第一速」となり、入力軸4bの回転は、この入力軸4b、スライドギャー8の中三段ギャー8b、第一軸4e上の平ギャー10aとへ伝達され、更に、前記同様、第一軸4eのスプラインギャー10b、第二軸4fの平ギャー11a、第二軸4f、チェン12とへ伝達され、デフ機構7、車軸5,5とへ伝達される構成である。
【0020】
又、前記スライドギャー8を、更に、右側へスライドし、伝動ケース4の内最端部へ位置させたときには、スライドギャー8の小三段ギャー8cと、第二軸4f上の平ギャー11aとが噛合し、「逆回転」となり、入力軸4bの回転は順に、スライドギャー8上の小三段ギャー8c、第二軸4fの平ギャー11a、第二軸4f、チェン12とへ伝達され、デフ機構7、車軸5,5とへ伝達される構成である。
【0021】
これにより、走行系の伝動機構4aは、逆回転を含み車速を三段階に切換える構成である。
次に図1に基づき伝動ケース40の作業用の伝動機構40aからロータリ軸41への伝動構成について説明する。伝動ケース40には入力軸42と平行に3本の軸、即ち第2軸43、第3軸44,第4軸45が平行に設けられ、入力軸42に摺動自在に設けた変速ギヤ46を第2軸43の伝動ギヤ47に噛み合わせると第3軸44の大径ギヤ48,チェンスプロケット49を経てロータリ軸41を入力軸42と同方向に回転(正転)させる。また、上記変速ギヤ46を反対に摺動させると、第4軸45のギヤ50にかみ合い、前記ギヤ47,48,スプロケット49を経てロータリ軸41を逆転する構成である。
【0022】
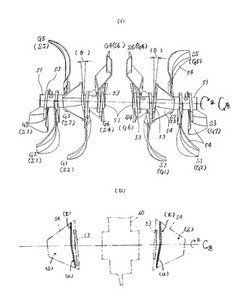
前記ロータリ軸41の左右突出軸部には連結軸としての耕耘パイプ51,51を嵌合させてピン52,52で連動連結している。また、左・右各耕耘パイプ51には、平面視においてロータリ軸41軸心に直交する平面に対して取付角(θ)を形成すべく爪ホルダ53を傾斜させて装着し、この爪ホルダ53に正逆用耕耘爪54を装着してなる。爪ホルダ53はボルト挿通孔を形成した単板からなり中央に装着孔を形成し、耕耘爪54の装着側が非装着側に対して外方(中央の伝動ケース40から離れる側)に傾斜するよう上記取付角(θ)を設定して耕耘パイプ51に溶着されている。上記のように取り付けられた正逆用耕耘爪54は、取付基部から先端側に向けてこの先端側が中央の上記伝動ケース40側から離れる方向に湾曲(s)し、該取付基部の横断面形状はロータリ軸41が正回転するときに打込み側がロータリ軸41軸心と略直交する平面に沿い(t)、後続側が徐々に伝動ケース40に接近(u)すべく取付けられる(図2(イ)(ロ))。
【0023】
図2に示すように、複数の爪ホルダ53,53…が左右の耕耘パイプ51,51夫々に、適宜の位相をずらせて配置されている。図例では左右対称となるように位相を決定している。正転時は符号S1、S2、S3…S7の順に打ち込みされる。逆転時には、符号G1、G2、G3…G7の順に打ち込まれるものである。
【0024】
前記各正逆用耕耘爪54を装着した耕耘爪パイプ51は、ロータリ軸41に対して、各正逆用耕耘爪18の正転打込み側が外側へ位置すべく、この耕耘爪パイプ51を外側部へ設けることにより、各正逆用耕耘爪18を組換えることなく、ロータリ耕耘装置17のロータリ軸41を正回転、又は逆回転に切り換えすることにより、耕耘作業と畝立作業との両者を爪の交換無しに行うことができて、組換えが不用となる。よって、爪の組換え時間と、手間が不用となり、工数の低減を図ることができる。すなわち、正転中、正逆用耕耘爪54の打ち込みで土壌は耕耘される。該爪は取付基部から先端側に向けてこの先端側が中央の上記伝動ケース40側から離れる方向に湾曲しているから、耕耘土は伝動ケースから遠ざかるように外向きに移動しようとするが、爪の後続側が徐々に伝動ケース40に接近すべく設けられていてこの後続側が耕耘土を伝動ケース側に案内するため、両者が相俟って耕耘土を内・外方に偏らせることなく万遍に分布させる。また、逆転では、正転時に後続側となる方が先に打ち込まれるから、爪先端側の湾曲形状が伝動ケース40から離れる状態と相俟って耕耘土を伝動ケース40から遠ざかるように跳ね上げて往復隣接耕耘によって所定の畝を形成することができる。
【0025】
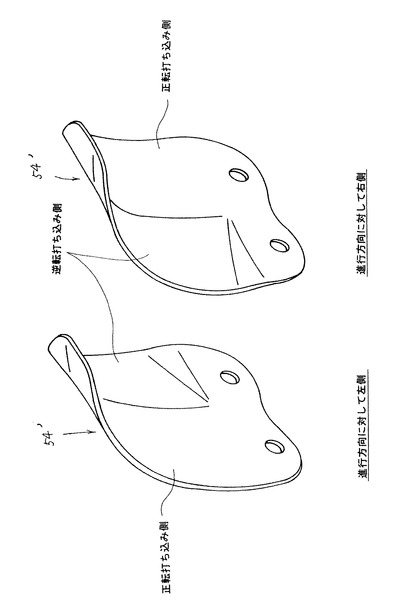
図3〜図5で示す正逆用耕耘爪54は、取付孔を有する基部を残しその中心線の左右において対称に湾曲させた形状とし、前記のように取付角θをもって本件発明の一態様を具現化するものであるが、図6〜図8に示す正逆転耕耘爪54´は、正転打ち込み側について湾曲形成をなくして上記中心線の左右における一方のみを湾曲形成したものである。この場合にあっても、ロータリ軸あるいは耕耘爪パイプ51への取り付けは、この爪54´の取付基部から先端側に向けてこの先端側が中央の上記伝動ケース40側から離れる方向に湾曲し、横断面形状はロータリ軸41が正回転するときに打込み側がロータリ軸41軸心と略直交する平面に沿い、後続側が徐々に伝動ケース40に接近すべくなすものである。
【0026】
図1において、符号55は正逆切換えシフタ、56はシフタ軸である。シフタ軸56は図外の正逆切換レバーに連動して長手方向に位置変更され、シフタ55を連動して前記ギヤ46を摺動すべく構成される。
【0027】
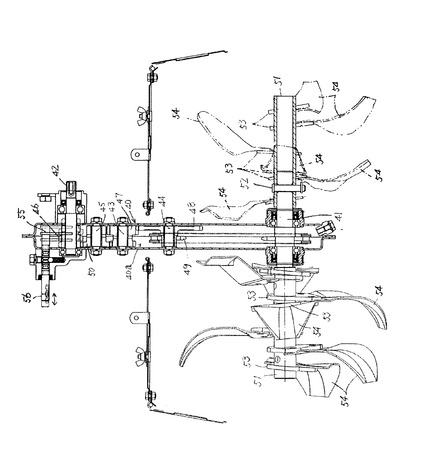
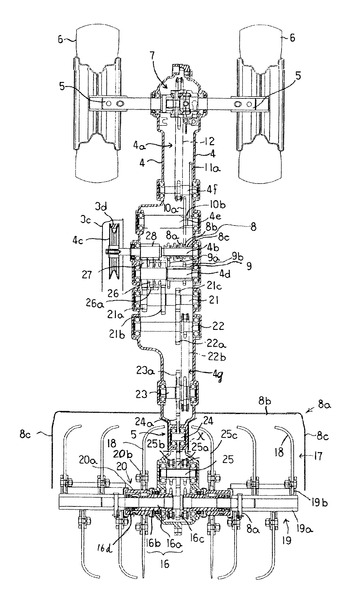
次に、図10で示す如く、この発明の第2実施例の要部である前記歩行型耕耘機1の伝動ケース4について説明する。尚図10の他方側の後側のへ字状部ケースに内装した作業用の伝動機構4aと、ロータリ耕耘装置17の耕耘爪外パイプ部19、及び耕耘爪内パイプ部20等について、予め説明する。前記伝動ケース4の他方側である後側のへの字部へ内装した作業用の伝動機構4gは、図9で示す如く入力軸4bと、変速軸4dとを併設して、伝動上手側から第三軸21と、第四軸22と、第五軸23と、第六軸24と、第七軸25と、内・外耕耘軸16a,16bよりなるロータリ軸16を軸支して設けた構成である。第七軸25から内耕耘軸16aと、外耕耘軸16bへ回転を分岐する構成である。
【0028】
前記第三軸21上側には、大・小二段の平ギャー21a,21b、及び伝動用の平ギャー21cを軸支すると共に、第四軸22には、平ギャー21cと噛合する平ギャー22aを軸支した構成である。又、第四軸22と、第五軸23との間には、チェン22bを掛け渡した構成である。第五軸23と、第六軸24と、第七軸25との間には、常時噛合する平ギャー23aと、平ギャー24aと、平ギャー25aとを軸支した構成である。又、第七軸25には、左右両側にチェン25b,25cを掛け渡した構成である。これら各チェン25b,25cの回転を内耕耘軸16aの周りを回る外耕耘軸16bへ伝達する構成である。
【0029】
前記作業用の伝動機構4gでは、走行レバー14aを左右に操作すると、作業用変速シフタの動きを介して、スライドギャー26を変速軸4d上でスライドする。そして、スライドギャー26を伝動ケース4内端部に位置させたときには、大径ギャー27と、第三軸21の平ギャー21aとが噛合して、「第二速」となり、回転動力は、順次入力軸4bのスプラインギャー28、大径ギャー27、第三軸21の平ギャー21a、第三軸21、この第三軸21の平ギャー21c、第四軸22の平ギャー22a、第四軸22、チェン22b、第五軸23、この第五軸23の平ギャー23a、第六軸24の平ギャー24a、第六軸24、そして第七軸25の平ギャー25aとへ伝達され、平ギャー16cを介して、内耕耘軸16aへ伝達されると共に、第七軸25のチェン25b,25cを介して、外耕耘軸16bへ動力を伝達される構成である。
【0030】
又、前記スライドギャー26を伝動ケース4の中央部へ位置させたときには、小径ギャー26aと、第三軸21の平ギャー21bとが噛合して、「第一速」となり、回転動力は順に入力軸4b、スプラインギャー28、小径ギャー26a、第三軸21の平ギャー21b、この第三軸21、この第三軸21上の平ギャー21c、第四軸22の平ギャー22a、第四軸22、チェン22b、第五軸23、この第五軸23の平ギャー23a、第六軸24の平ギャー24a、この第六軸24、そして第七軸25の平ギャー25aへと伝達され、平ギャー16cを介して、ロータリ耕耘軸16の内耕耘軸16aへ伝達されると共に、第七軸25を介して、チェン25b,25cを介して、ロータリ耕耘軸16の外耕耘軸16bへ動力が伝達される。
【0031】
これにより、作業用の伝動機構4gでは、ロータリ軸16の内・外耕耘軸16a,16bを高低二段に切り換えを行うことができる構成である。又、耕耘レバー14bの操作により、作業用の伝動機構4gのロータリ軸16の内・外耕耘軸16a,16bの回転方向を正回転から逆回転へ、又、逆回転から正回転へ切換可能な構成である。
【0032】
前記ロータリ耕耘装置17のロータリ軸16の内・外耕耘軸16a,16bの回転方向は、耕耘作業時は、耕耘レバー14b操作により、内耕耘軸16aは正回転駆動(図13中矢印(イ)方向)され、これに伴い、この内耕耘軸16aへ装着した耕耘爪外パイプ部19は正回転駆動されると共に、外耕耘軸16bは逆回転駆動され、これに伴いこの外耕耘軸16bへ装着した耕耘爪内パイプ部20は逆回転駆動される構成である。又、畝立作業時には、耕耘レバー14bの操作により、耕耘作業時とは、逆回転方向へ耕耘爪外・内パイプ部19,20が回転駆動される構成である。
【0033】
前記ロータリ耕耘装置17の耕耘爪外・内パイプ部19,20の上側には、図14で示す如く所定の隙間を設けて、略半円形状の耕耘カバー17aと、この耕耘上カバー17bの左右両側で、この耕耘上カバー17bの上側面へ沿わせて、左右両側へ側板17cを装着した耕耘カバー18aを伝動ケース4へ装着した構成である。
【0034】
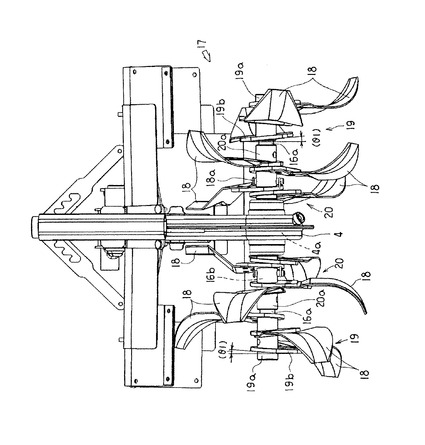
前記ロータリ耕耘装置17の耕耘爪外パイプ部19は、図10で示す如く耕耘外パイプ19aの外周部には、横方向に所定間隔で、円周方向に位置をずらせて、複数個の爪ホルダ19bを、ロータリ軸(16)軸心に対して所定角(θ1)で、耕耘爪取付側が外側へ傾斜すべく固着した構成である。この各爪ホルダ19bには、正逆用耕耘爪18をボルト、及びナット等により装着している。この耕耘外パイプ部19の耕耘外パイプ19aを、ロータリ軸16の内耕耘軸16aの外周部へ挿入し、抜け止めピン8aを耕耘外パイプ19aと、内耕耘軸16aとに挿入して連結する構成である。
【0035】
又、前記ロータリ耕耘装置17の耕耘爪内パイプ部20について、図11で示す如く耕耘内パイプ20aの外周部には、横方に所定間隔で円周方向に位置をずらせて、複数個の爪ホルダ20bを、ロータリ軸16軸心に対して略直角状態に固着して設けた構成である。この各爪ホルダ19b,20bには、正逆用耕耘爪18をボルト、及びナット等により、装着して設けた構成である。この耕耘爪内パイプ部20の耕耘内パイプ20aを、ロータリ軸16の外耕耘軸16bの外周部に形成したスプライン部16dに嵌合した構成である。
【0036】
前記各正逆用耕耘爪18を装着した耕耘爪外パイプ部19は、ロータリ軸16に対して、各正逆用耕耘爪18の正転打込み側が外側へ位置すべく、この耕耘爪外パイプ部19を外側部へ設けると共に、耕耘爪内パイプ部20は、ロータリ軸16に対して、各正逆用耕耘爪18の逆転打込み側が内側へ位置すべく、この耕耘爪内パイプ部20を内側部へ位置させたことにより、各正逆用耕耘爪18を内外組換えることなく、ロータリ耕耘装置17のロータリ軸16の内・外耕耘軸16a・16bを正回転、又は逆回転に切り換えすることにより、耕耘作業と畝立作業との両者を爪の交換無しに行うことができて、組換えが不用となる。よって、爪の組換え時間と、手間が不用となり、工数の低減を図ることができる。
【0037】
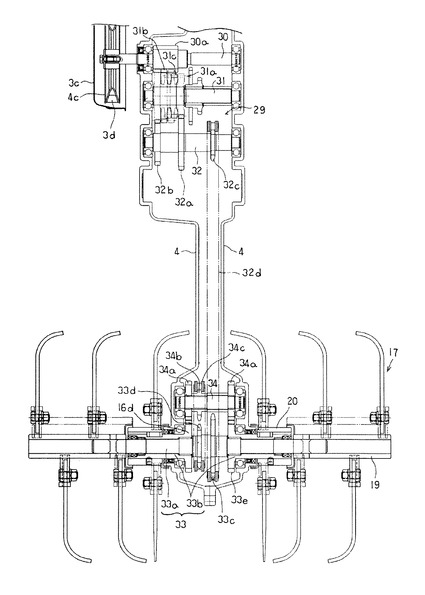
前記左右両側のへ字形状の伝動ケース4,4には、図13で示す如く後側のへ字形状内には、作業用(耕耘用)の伝動機構29を内装して、下部へ設けたロータリ耕耘装置17を回転駆動する構成である。
【0038】
前記伝動機構29の上部より、順次に入力軸30を軸支して設け、この入力軸30の外側の軸端部には、入力プーリ4cを軸支して設け、エンジン3の回転動力を、入力プーリ4cへ掛け渡した伝動ベルト3dで、入力軸30から伝動機構29へ入力する構成である。入力軸30には、ギャー30aを軸支した構成である。
【0039】
前記入力軸30の下手側には、上変速軸31を軸支して設け、この上変速軸31には、大ギャー31bと、小ギャー31cとよりなるスライドギャー31aを軸支した構成である。上変速軸31の下手側には、下変速軸32を軸支して設け、この下変速軸32には、大ギャー32aと、小ギャー32bと、上スプロケット32cとを軸支した構成である。変速シフターの作動により、入力軸30のギャー30aと、上変速軸32のスライドギャー31aの大ギャー31bと、下変速軸32の小ギャー32aとの噛合により、ロータリ耕耘装置17の回転速度は、「一速」になる構成である。又、入力軸30のギャー30aと、変速軸31の大ギャー31bと、小ギャー31cと、下変速軸32の大ギャー32aとの噛合により、ロータリ耕耘装置17の回転速度は、「二速」になる構成である。
【0040】
前記伝動機構29の下部には、内・外耕耘軸33a,33bよりなるロータリ軸33を設けた構成である。内耕耘軸33aの左右方向略中央部には、スプロケット大33cを軸支して設けると共に、スプロケット小33dを軸支して設けた構成である。内耕耘軸33aのスプロケット大33cと、下変速軸32の上スプロケット32cとには、チェン32dを掛け渡して、内耕耘軸33aを回転駆動する構成である。これにより、ロータリ耕耘装置17の耕耘爪外パイプ部19が回転駆動される構成である。
【0041】
前記内耕耘軸33aの略中央部の左右両側には、左右に所定の間隔を設けて、内側端部へ平ギャー33eを設けた外耕耘軸33b,33bを軸支して設けた構成である。内耕耘軸33aの上側には、下軸34を軸支して設け、下軸34の外側端部には、平ギャー34aと、スプロケット34bとを軸支した構成である。このスプロケット34bと、内耕耘軸33aへ設けたスプロケット小33dとには、チェン34cを掛け渡した構成である。
【0042】
前記内耕耘軸33aの回転駆動により、この内耕耘軸33aのスプロケット小33dと、下軸34のスプロケット34b、各平ギャー34aと、各外耕耘軸33bの各平ギャー33eとにより、これら各外耕耘軸33bが前記内耕耘軸33aとは逆方向に回転駆動される構成である。これにより、ロータリ耕耘装置17の耕耘爪内パイプ部20が回転駆動される構成である。
【0043】
これにより、前記ロータリ耕耘装置17の耕耘爪外・内パイプ部19,20の回転駆動用の構成部品の減少を図ることができて、コスト低減が可能である。
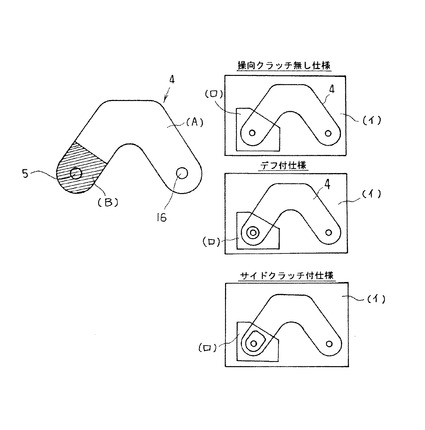
前記歩行型耕耘機1の略へ字形状で、左右に二分割方式で、ダイキャスト、又は鉄板材により、形成する伝動ケース4は、図14で示す如く前側のへ字形状の下部の走行用の車軸5の近傍部(B)と、その他の作業用のロータリ軸16部(A)とに二分割して、(B)部を入子型で製作する構成として、ダイキャスト、又は鉄板材の主型(イ)と、入子型(ロ)との組合せによる伝動ケース4をダイキャスト、又は鉄板材で製作する構成である。
【0044】
前記入子型(ロ)は、歩行型耕耘機1は仕様により、例えば、操向クラッチ無し仕様、デフ付仕様、サイドクラッチ付仕様により、入子型(ロ)を別々に製作し、仕様別により、主型(イ)と、入子型(ロ)との組合せにより、伝動ケース4をダイキャスト、又は鉄板材で製作する構成である。
【0045】
これにより、前記入子式とすることにより、仕様別のダイキャスト型、又は鉄板材型の管理が容易である。仕様別の対応が容易である。型を小さくすることが可能となり、コスト低減になる。
【0046】
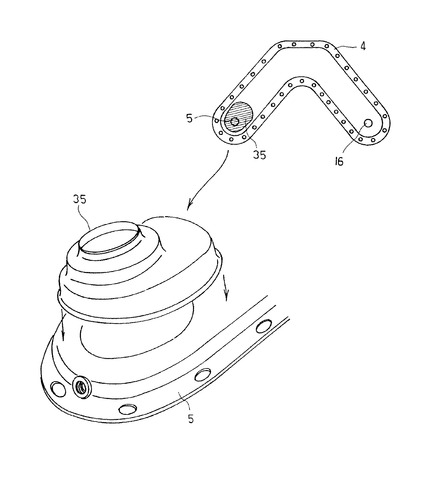
前記伝動ケース4を鉄板材により、製作するときは、図15、及び図16で示す如く車軸5の近傍部は、別部品の車軸用ケース35として製作して、この車軸用ケース35を熔接等により、伝動ケース4の前方下部へ装着すると共に、ロータリ軸16の近傍部は、別部品のロータリ軸ケース36として製作して、このロータリ軸ケース36を熔接等により、伝動ケース4の後方下部へ装着した構成である。
【0047】
これにより、前記車軸5、及びロータリ軸16の近傍部を伝動ケース4とは、別部品として、車軸用ケース35と、ロータリ軸ケース36として製作して、伝動ケース4へ熔接等により、装着した構成としたことにより、プレス型を小型化することができる。又、強度アップを図ることができる。更に、仕様変更の対応が容易である。
【符号の説明】
【0048】
2 エンジン取付フレーム
3 エンジン
4 伝動ケース
6 走行輪
13 燃料タンク
14 操作ケース
15 ハンドル
16 ロータリ軸
17 ロータリ耕耘装置
18 正逆用耕耘爪
19 耕耘爪外パイプ部
19a 耕耘外パイプ
19b 爪ホルダ
20 耕耘爪内パイプ部
20a 耕耘内パイプ
20b 爪ホルダ
41 ロータリ軸
51 耕耘パイプ(連結軸)
53 爪ホルダ
54 正逆用耕耘爪
54´ 正逆用耕耘爪
【技術分野】
【0001】
本発明は、ロータリ耕耘方法に関する。特に、機体後部の伝動ケースの左右両側へ設けたロータリ軸を正逆転切替可能に構成し、この軸にロータリ耕耘装置の正逆用耕耘爪を装着もので、歩行型耕耘機のロータリ耕耘装置に利用できる。
【背景技術】
【0002】
特許文献1で示す如く、ロータリ耕耘装置の伝動ケースの左右両側へ突出させて設けた第一ロータリ軸には、第一耕耘爪を装着して設け、又、各第一ロータリ軸の外径部へ設けた、各第二ロータリ軸には、第二耕耘爪と、グローブ爪とを装着した構成がある。このグローブ爪は、正面視左右略対称形状で、ロータリ軸が正転し、又は逆転する構成のいずれにも打ち込み作用を具備するものである。このグローブ爪は、側面視において第二ロータリ軸への取付位置近傍で、一方側へ向けて湾曲し、かつ先端部が他方側へ向けて湾曲し、これら両湾曲部の間で耕耘した土を抱き込み可能な凹部を形成した構成であり、第二ロータリ軸へ装着するグローブ爪の凹部を外側へ向けて装着した構成である。
【0003】
例えば、内側部の前記第二耕耘爪とグローブ爪とは、正転では、このグローブ爪の凹状部で多くの耕耘土を抱き込み、この多量の土を遠心力により、外側の逆転する第一耕耘爪で耕耘した耕耘部へ補充することができ、耕耘後の耕地状態を耕耘巾の全面に亘って均等化している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第3279931号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
ロータリ耕耘装置の各第一耕耘爪と、各第二耕耘爪と、各グローブ爪とにより、耕耘作業を行うときと、畝立耕耘作業を行うときとでは、これら各爪の取付け方向を組換えする必要がある。すなわち、普通耕耘するときは、先端に向けて湾曲する爪をこの先端部が中央の伝動ケースに向かう方向に取り付けてロータリ軸を正回転させることによって左右方向に略平らな耕土面を得ることができ、畝立作業を行うときは、湾曲方向が逆向きに取りつけかつロータリ軸を逆回転に連動することによって中央伝動ケースから耕土が左右に跳ね上げられるようになすが、正逆用耕耘爪といえども湾曲方向を転換すべく組み換えが必要で、この組換えに時間と、手間とが必要であったが、この発明により、これらの課題を解決しようとするものである。
【課題を解決するための手段】
【0006】
このためこの発明は次の技術的手段を講じた。
すなわち、請求項1に記載の発明は、ロータリ耕耘装置(17)の伝動ケース(40)の下部左右両側にロータリ軸(41)を突出し該軸(41)を正回転又は逆回転に切り換える切換操作部を備え、上記ロータリ軸(41)又は該ロータリ軸(41)と一体的に連結する連結軸(51,51)に正逆用耕耘爪(54)を取付け、ロータリ軸(41)の正転、逆転の切り換えによって普通耕耘か畝立作業かを選択するロータリ耕耘方法とする。
【0007】
正転中、正逆用耕耘爪(54)の打ち込みで土壌は耕耘される。該爪は耕耘土を内・外方に偏らせることなく万遍に分布させる。また、逆転では、耕耘土を伝動ケース(40)から遠ざかるように跳ね上げて往復隣接耕耘によって所定の畝を形成することができる。
【発明の効果】
【0008】
請求項1に記載の発明においては、正転中、正逆用耕耘爪(54)の打ち込みで土壌は耕耘され、耕耘土を内・外方に偏らせることなく万遍に分布させ、また、逆転では、耕耘土を伝動ケース(40)から遠ざかるように跳ね上げて往復隣接耕耘にによって所定の畝を形成することができる。したがって、ロータリ軸(41)の正転、逆転の切り換えを行うだけで普通耕耘か畝立作業かを選択でき、切り換え操作が簡単である。
【図面の簡単な説明】
【0009】
【図1】第1実施例のロータリ耕耘装置部の拡大背面図
【図2】ロータリ耕耘装置部の拡大背面図(イ)、その一部の拡大断面図(ロ)
【図3】ロータリ耕耘装置部の左側部の拡大側面図
【図4】ロータリ耕耘装置部の右側部の拡大側面図
【図5】ロータリ耕耘装置部の左側部の拡大側面図
【図6】ロータリ耕耘装置部の右側部の拡大側面図
【図7】正逆回転爪の拡大側面図
【図8】従来の正逆回転爪の拡大側面図
【図9】第2実施例における伝動ケース部の拡大背断面図
【図10】同上のロータリ耕耘装置部の拡大背面図
【図11】デフ機構部拡大平面図
【図12】歩行型耕耘機の左側全体側面図
【図13】他の実施例を示す図で、伝動ケース部の拡大背断面図
【図14】他の実施例を示す図で、分割型の伝動ケースの側面図
【図15】他の実施例を示す図で、分割型の伝動ケースの拡大側面図
【図16】他の実施例を示す図で、分割型の伝動ケースの拡大側面図
【発明を実施するための最良の形態】
【0010】
以下、本発明の一実施例を図面に基づいて説明する。
歩行型耕耘機1の全体構成について説明する。
前記歩行型耕耘機1は、図12で示す如く機体1a前部にエンジン取付フレーム2を設け、このエンジン取付フレーム2の前部には、バンパー2aを設けると共に、上側面には、プレート部材3aを掛け渡して、エンジン3を載置した構成である。このエンジン3の後側でエンジン取付フレーム2の後側には、側面視略へ字形状の伝動ケース4を装着して設けると共に、上部には、燃料タンク13を設ける。上記エンジン3を駆動し、このエンジン3の回転動力を伝動ケース4の一方側の前側のへ字状部へ内装した伝動機構4aの左右両側の車軸5には、左右一対の走行輪6を軸支して設けた構成である。
【0011】
又、前記伝動ケース4他方側の後側のへの字状部へ内装した伝動機構4aの左右両側で、伝動ケース4から突出するロータリ軸16には、ロータリ耕耘装置17の正逆用耕耘爪18を装着した耕耘爪外パイプ装置19を延長状態に、耕耘爪内パイプ装置20を2重筒軸状態に軸支して設けた構成である。
【0012】
又、前記エンジン3の側部には、マフラー3b、及びベルトケース3cを設け、このベルトケース3c内の伝動ベルト3dを介して、エンジン3の回転動力を伝動ケース4へ内装した前後の伝動機構4aの入力軸4bへ伝達する構成である。
【0013】
又、前記伝動ケース4の上側には、図12で示す如く操作ケース14を装着して設け、この操作ケース14には、走行車速を変速操作する走行レバー14aと、ロータリ耕耘装置17を変速操作する耕耘レバー14bとを設けた構成である。更に、操作ケース14の下側で、伝動ケース4には、基部へ取付板15aを設けたハンドル15を装着した構成である。ハンドル15には、クラッチレバー14cを設け、このクラッチレバー14cの「入」−「切」操作に連動して、伝動ベルト3dへ設けたテンションクラッチ装置14dが「入」−「切」操作され、歩行型耕耘機1が走行、又は停止する構成である。
【0014】
次に、図9で示す如く伝動ケース4の一方側である前側のへ字状部ケースに内装した走行用の伝動機構4aから下端部へ軸支した車軸5への伝動構成について説明する。左右両側のへ字形状の伝動ケース4をボルト、及びナット等で装着して一体に形成した構成であり、この一体に形成された伝動ケース4内へ走行用の伝動機構4aを内装して設けた構成である。
【0015】
前記伝動ケース4の前側の走行用の伝動機構4aは、図9で示す如くこの伝動機構4aの上部には、入力軸4bを軸支して設け、一方側の軸端部は、伝動ケース4から突出させて設け、この突出した先端部には、入力プーリ4cを軸支して設け、この入力プーリ4cへエンジン3から掛け渡した伝動ベルト3dにより、エンジン3の回転動力を入力して、伝動機構4aを回転駆動する構成である。
【0016】
前記入力軸4bと併設する変速軸4dを軸支して設けると共に、伝動上手側から第一軸4eと、第二軸4fと、デフ機構7とを設け、このデフ機構7には、左右両側へ伝動ケース4から突出させて車軸5,5を軸支して設け、これら各車軸5には、個別に走行輪6を軸支して設けた構成である。
【0017】
前記入力軸4bの一方側の端部には、大・中・小三段ギャー8a,8b,8cを有するスライドギャー8を軸支して設け、又、変速軸4dには、大・小二段ギャー9a,9bを有するカウンタ軸9を回転自在に軸支した構成である。更に、第一軸4eには、平ギャー10a、及び第二軸4fの平ギャー11aと常時噛合するスプラインギャー10bを軸支した構成である。第二軸4fからデフ機構7へはチェン12を介して常時伝動する構成である。
【0018】
前記デフ機構7は、図11で示す如く左・右ベベルギャー7a,7bを上下一方からだけのピニオンギャー7cにて駆動する構成である。
前記走行用の伝動機構4aでは、走行レバー14aを左右に操作すると、変速用シフタの動きを介して、スライドギャー8を入力軸4b上でスライドさせる。そして、スライドギャー8を伝動ケース4の中央部へ位置させたときには、スライドギャー8の大三段ギャー8aがカウンタ軸9の大二段ギャー9aに噛合して、「第二速」となり、入力軸4bの回転は、順次この入力軸4b、スライドギャー8上の大三段ギャー8a、カウンタ軸9上の大二段ギャー9a、カウンタ軸9、このカウンタ軸9上の小二段ギャー9b、第一軸4eの平ギャー10aとへ伝達され、更に、第一軸4eのスプラインギャー10b、第二軸4fの平ギャー11a、第二軸4f、チェン12とへ伝達され、デフ機構7、車軸5,5とへ伝達される構成である。
【0019】
又、前記スライドギャー8をやや右側(図中実線部)に位置させると、中三段ギャー8bと、第一軸4e軸上の平ギャー10aとが噛合され、「第一速」となり、入力軸4bの回転は、この入力軸4b、スライドギャー8の中三段ギャー8b、第一軸4e上の平ギャー10aとへ伝達され、更に、前記同様、第一軸4eのスプラインギャー10b、第二軸4fの平ギャー11a、第二軸4f、チェン12とへ伝達され、デフ機構7、車軸5,5とへ伝達される構成である。
【0020】
又、前記スライドギャー8を、更に、右側へスライドし、伝動ケース4の内最端部へ位置させたときには、スライドギャー8の小三段ギャー8cと、第二軸4f上の平ギャー11aとが噛合し、「逆回転」となり、入力軸4bの回転は順に、スライドギャー8上の小三段ギャー8c、第二軸4fの平ギャー11a、第二軸4f、チェン12とへ伝達され、デフ機構7、車軸5,5とへ伝達される構成である。
【0021】
これにより、走行系の伝動機構4aは、逆回転を含み車速を三段階に切換える構成である。
次に図1に基づき伝動ケース40の作業用の伝動機構40aからロータリ軸41への伝動構成について説明する。伝動ケース40には入力軸42と平行に3本の軸、即ち第2軸43、第3軸44,第4軸45が平行に設けられ、入力軸42に摺動自在に設けた変速ギヤ46を第2軸43の伝動ギヤ47に噛み合わせると第3軸44の大径ギヤ48,チェンスプロケット49を経てロータリ軸41を入力軸42と同方向に回転(正転)させる。また、上記変速ギヤ46を反対に摺動させると、第4軸45のギヤ50にかみ合い、前記ギヤ47,48,スプロケット49を経てロータリ軸41を逆転する構成である。
【0022】
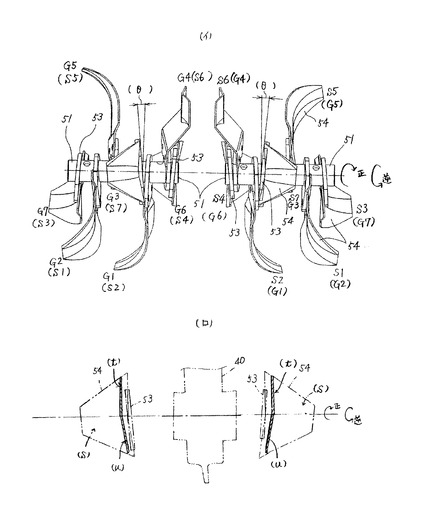
前記ロータリ軸41の左右突出軸部には連結軸としての耕耘パイプ51,51を嵌合させてピン52,52で連動連結している。また、左・右各耕耘パイプ51には、平面視においてロータリ軸41軸心に直交する平面に対して取付角(θ)を形成すべく爪ホルダ53を傾斜させて装着し、この爪ホルダ53に正逆用耕耘爪54を装着してなる。爪ホルダ53はボルト挿通孔を形成した単板からなり中央に装着孔を形成し、耕耘爪54の装着側が非装着側に対して外方(中央の伝動ケース40から離れる側)に傾斜するよう上記取付角(θ)を設定して耕耘パイプ51に溶着されている。上記のように取り付けられた正逆用耕耘爪54は、取付基部から先端側に向けてこの先端側が中央の上記伝動ケース40側から離れる方向に湾曲(s)し、該取付基部の横断面形状はロータリ軸41が正回転するときに打込み側がロータリ軸41軸心と略直交する平面に沿い(t)、後続側が徐々に伝動ケース40に接近(u)すべく取付けられる(図2(イ)(ロ))。
【0023】
図2に示すように、複数の爪ホルダ53,53…が左右の耕耘パイプ51,51夫々に、適宜の位相をずらせて配置されている。図例では左右対称となるように位相を決定している。正転時は符号S1、S2、S3…S7の順に打ち込みされる。逆転時には、符号G1、G2、G3…G7の順に打ち込まれるものである。
【0024】
前記各正逆用耕耘爪54を装着した耕耘爪パイプ51は、ロータリ軸41に対して、各正逆用耕耘爪18の正転打込み側が外側へ位置すべく、この耕耘爪パイプ51を外側部へ設けることにより、各正逆用耕耘爪18を組換えることなく、ロータリ耕耘装置17のロータリ軸41を正回転、又は逆回転に切り換えすることにより、耕耘作業と畝立作業との両者を爪の交換無しに行うことができて、組換えが不用となる。よって、爪の組換え時間と、手間が不用となり、工数の低減を図ることができる。すなわち、正転中、正逆用耕耘爪54の打ち込みで土壌は耕耘される。該爪は取付基部から先端側に向けてこの先端側が中央の上記伝動ケース40側から離れる方向に湾曲しているから、耕耘土は伝動ケースから遠ざかるように外向きに移動しようとするが、爪の後続側が徐々に伝動ケース40に接近すべく設けられていてこの後続側が耕耘土を伝動ケース側に案内するため、両者が相俟って耕耘土を内・外方に偏らせることなく万遍に分布させる。また、逆転では、正転時に後続側となる方が先に打ち込まれるから、爪先端側の湾曲形状が伝動ケース40から離れる状態と相俟って耕耘土を伝動ケース40から遠ざかるように跳ね上げて往復隣接耕耘によって所定の畝を形成することができる。
【0025】
図3〜図5で示す正逆用耕耘爪54は、取付孔を有する基部を残しその中心線の左右において対称に湾曲させた形状とし、前記のように取付角θをもって本件発明の一態様を具現化するものであるが、図6〜図8に示す正逆転耕耘爪54´は、正転打ち込み側について湾曲形成をなくして上記中心線の左右における一方のみを湾曲形成したものである。この場合にあっても、ロータリ軸あるいは耕耘爪パイプ51への取り付けは、この爪54´の取付基部から先端側に向けてこの先端側が中央の上記伝動ケース40側から離れる方向に湾曲し、横断面形状はロータリ軸41が正回転するときに打込み側がロータリ軸41軸心と略直交する平面に沿い、後続側が徐々に伝動ケース40に接近すべくなすものである。
【0026】
図1において、符号55は正逆切換えシフタ、56はシフタ軸である。シフタ軸56は図外の正逆切換レバーに連動して長手方向に位置変更され、シフタ55を連動して前記ギヤ46を摺動すべく構成される。
【0027】
次に、図10で示す如く、この発明の第2実施例の要部である前記歩行型耕耘機1の伝動ケース4について説明する。尚図10の他方側の後側のへ字状部ケースに内装した作業用の伝動機構4aと、ロータリ耕耘装置17の耕耘爪外パイプ部19、及び耕耘爪内パイプ部20等について、予め説明する。前記伝動ケース4の他方側である後側のへの字部へ内装した作業用の伝動機構4gは、図9で示す如く入力軸4bと、変速軸4dとを併設して、伝動上手側から第三軸21と、第四軸22と、第五軸23と、第六軸24と、第七軸25と、内・外耕耘軸16a,16bよりなるロータリ軸16を軸支して設けた構成である。第七軸25から内耕耘軸16aと、外耕耘軸16bへ回転を分岐する構成である。
【0028】
前記第三軸21上側には、大・小二段の平ギャー21a,21b、及び伝動用の平ギャー21cを軸支すると共に、第四軸22には、平ギャー21cと噛合する平ギャー22aを軸支した構成である。又、第四軸22と、第五軸23との間には、チェン22bを掛け渡した構成である。第五軸23と、第六軸24と、第七軸25との間には、常時噛合する平ギャー23aと、平ギャー24aと、平ギャー25aとを軸支した構成である。又、第七軸25には、左右両側にチェン25b,25cを掛け渡した構成である。これら各チェン25b,25cの回転を内耕耘軸16aの周りを回る外耕耘軸16bへ伝達する構成である。
【0029】
前記作業用の伝動機構4gでは、走行レバー14aを左右に操作すると、作業用変速シフタの動きを介して、スライドギャー26を変速軸4d上でスライドする。そして、スライドギャー26を伝動ケース4内端部に位置させたときには、大径ギャー27と、第三軸21の平ギャー21aとが噛合して、「第二速」となり、回転動力は、順次入力軸4bのスプラインギャー28、大径ギャー27、第三軸21の平ギャー21a、第三軸21、この第三軸21の平ギャー21c、第四軸22の平ギャー22a、第四軸22、チェン22b、第五軸23、この第五軸23の平ギャー23a、第六軸24の平ギャー24a、第六軸24、そして第七軸25の平ギャー25aとへ伝達され、平ギャー16cを介して、内耕耘軸16aへ伝達されると共に、第七軸25のチェン25b,25cを介して、外耕耘軸16bへ動力を伝達される構成である。
【0030】
又、前記スライドギャー26を伝動ケース4の中央部へ位置させたときには、小径ギャー26aと、第三軸21の平ギャー21bとが噛合して、「第一速」となり、回転動力は順に入力軸4b、スプラインギャー28、小径ギャー26a、第三軸21の平ギャー21b、この第三軸21、この第三軸21上の平ギャー21c、第四軸22の平ギャー22a、第四軸22、チェン22b、第五軸23、この第五軸23の平ギャー23a、第六軸24の平ギャー24a、この第六軸24、そして第七軸25の平ギャー25aへと伝達され、平ギャー16cを介して、ロータリ耕耘軸16の内耕耘軸16aへ伝達されると共に、第七軸25を介して、チェン25b,25cを介して、ロータリ耕耘軸16の外耕耘軸16bへ動力が伝達される。
【0031】
これにより、作業用の伝動機構4gでは、ロータリ軸16の内・外耕耘軸16a,16bを高低二段に切り換えを行うことができる構成である。又、耕耘レバー14bの操作により、作業用の伝動機構4gのロータリ軸16の内・外耕耘軸16a,16bの回転方向を正回転から逆回転へ、又、逆回転から正回転へ切換可能な構成である。
【0032】
前記ロータリ耕耘装置17のロータリ軸16の内・外耕耘軸16a,16bの回転方向は、耕耘作業時は、耕耘レバー14b操作により、内耕耘軸16aは正回転駆動(図13中矢印(イ)方向)され、これに伴い、この内耕耘軸16aへ装着した耕耘爪外パイプ部19は正回転駆動されると共に、外耕耘軸16bは逆回転駆動され、これに伴いこの外耕耘軸16bへ装着した耕耘爪内パイプ部20は逆回転駆動される構成である。又、畝立作業時には、耕耘レバー14bの操作により、耕耘作業時とは、逆回転方向へ耕耘爪外・内パイプ部19,20が回転駆動される構成である。
【0033】
前記ロータリ耕耘装置17の耕耘爪外・内パイプ部19,20の上側には、図14で示す如く所定の隙間を設けて、略半円形状の耕耘カバー17aと、この耕耘上カバー17bの左右両側で、この耕耘上カバー17bの上側面へ沿わせて、左右両側へ側板17cを装着した耕耘カバー18aを伝動ケース4へ装着した構成である。
【0034】
前記ロータリ耕耘装置17の耕耘爪外パイプ部19は、図10で示す如く耕耘外パイプ19aの外周部には、横方向に所定間隔で、円周方向に位置をずらせて、複数個の爪ホルダ19bを、ロータリ軸(16)軸心に対して所定角(θ1)で、耕耘爪取付側が外側へ傾斜すべく固着した構成である。この各爪ホルダ19bには、正逆用耕耘爪18をボルト、及びナット等により装着している。この耕耘外パイプ部19の耕耘外パイプ19aを、ロータリ軸16の内耕耘軸16aの外周部へ挿入し、抜け止めピン8aを耕耘外パイプ19aと、内耕耘軸16aとに挿入して連結する構成である。
【0035】
又、前記ロータリ耕耘装置17の耕耘爪内パイプ部20について、図11で示す如く耕耘内パイプ20aの外周部には、横方に所定間隔で円周方向に位置をずらせて、複数個の爪ホルダ20bを、ロータリ軸16軸心に対して略直角状態に固着して設けた構成である。この各爪ホルダ19b,20bには、正逆用耕耘爪18をボルト、及びナット等により、装着して設けた構成である。この耕耘爪内パイプ部20の耕耘内パイプ20aを、ロータリ軸16の外耕耘軸16bの外周部に形成したスプライン部16dに嵌合した構成である。
【0036】
前記各正逆用耕耘爪18を装着した耕耘爪外パイプ部19は、ロータリ軸16に対して、各正逆用耕耘爪18の正転打込み側が外側へ位置すべく、この耕耘爪外パイプ部19を外側部へ設けると共に、耕耘爪内パイプ部20は、ロータリ軸16に対して、各正逆用耕耘爪18の逆転打込み側が内側へ位置すべく、この耕耘爪内パイプ部20を内側部へ位置させたことにより、各正逆用耕耘爪18を内外組換えることなく、ロータリ耕耘装置17のロータリ軸16の内・外耕耘軸16a・16bを正回転、又は逆回転に切り換えすることにより、耕耘作業と畝立作業との両者を爪の交換無しに行うことができて、組換えが不用となる。よって、爪の組換え時間と、手間が不用となり、工数の低減を図ることができる。
【0037】
前記左右両側のへ字形状の伝動ケース4,4には、図13で示す如く後側のへ字形状内には、作業用(耕耘用)の伝動機構29を内装して、下部へ設けたロータリ耕耘装置17を回転駆動する構成である。
【0038】
前記伝動機構29の上部より、順次に入力軸30を軸支して設け、この入力軸30の外側の軸端部には、入力プーリ4cを軸支して設け、エンジン3の回転動力を、入力プーリ4cへ掛け渡した伝動ベルト3dで、入力軸30から伝動機構29へ入力する構成である。入力軸30には、ギャー30aを軸支した構成である。
【0039】
前記入力軸30の下手側には、上変速軸31を軸支して設け、この上変速軸31には、大ギャー31bと、小ギャー31cとよりなるスライドギャー31aを軸支した構成である。上変速軸31の下手側には、下変速軸32を軸支して設け、この下変速軸32には、大ギャー32aと、小ギャー32bと、上スプロケット32cとを軸支した構成である。変速シフターの作動により、入力軸30のギャー30aと、上変速軸32のスライドギャー31aの大ギャー31bと、下変速軸32の小ギャー32aとの噛合により、ロータリ耕耘装置17の回転速度は、「一速」になる構成である。又、入力軸30のギャー30aと、変速軸31の大ギャー31bと、小ギャー31cと、下変速軸32の大ギャー32aとの噛合により、ロータリ耕耘装置17の回転速度は、「二速」になる構成である。
【0040】
前記伝動機構29の下部には、内・外耕耘軸33a,33bよりなるロータリ軸33を設けた構成である。内耕耘軸33aの左右方向略中央部には、スプロケット大33cを軸支して設けると共に、スプロケット小33dを軸支して設けた構成である。内耕耘軸33aのスプロケット大33cと、下変速軸32の上スプロケット32cとには、チェン32dを掛け渡して、内耕耘軸33aを回転駆動する構成である。これにより、ロータリ耕耘装置17の耕耘爪外パイプ部19が回転駆動される構成である。
【0041】
前記内耕耘軸33aの略中央部の左右両側には、左右に所定の間隔を設けて、内側端部へ平ギャー33eを設けた外耕耘軸33b,33bを軸支して設けた構成である。内耕耘軸33aの上側には、下軸34を軸支して設け、下軸34の外側端部には、平ギャー34aと、スプロケット34bとを軸支した構成である。このスプロケット34bと、内耕耘軸33aへ設けたスプロケット小33dとには、チェン34cを掛け渡した構成である。
【0042】
前記内耕耘軸33aの回転駆動により、この内耕耘軸33aのスプロケット小33dと、下軸34のスプロケット34b、各平ギャー34aと、各外耕耘軸33bの各平ギャー33eとにより、これら各外耕耘軸33bが前記内耕耘軸33aとは逆方向に回転駆動される構成である。これにより、ロータリ耕耘装置17の耕耘爪内パイプ部20が回転駆動される構成である。
【0043】
これにより、前記ロータリ耕耘装置17の耕耘爪外・内パイプ部19,20の回転駆動用の構成部品の減少を図ることができて、コスト低減が可能である。
前記歩行型耕耘機1の略へ字形状で、左右に二分割方式で、ダイキャスト、又は鉄板材により、形成する伝動ケース4は、図14で示す如く前側のへ字形状の下部の走行用の車軸5の近傍部(B)と、その他の作業用のロータリ軸16部(A)とに二分割して、(B)部を入子型で製作する構成として、ダイキャスト、又は鉄板材の主型(イ)と、入子型(ロ)との組合せによる伝動ケース4をダイキャスト、又は鉄板材で製作する構成である。
【0044】
前記入子型(ロ)は、歩行型耕耘機1は仕様により、例えば、操向クラッチ無し仕様、デフ付仕様、サイドクラッチ付仕様により、入子型(ロ)を別々に製作し、仕様別により、主型(イ)と、入子型(ロ)との組合せにより、伝動ケース4をダイキャスト、又は鉄板材で製作する構成である。
【0045】
これにより、前記入子式とすることにより、仕様別のダイキャスト型、又は鉄板材型の管理が容易である。仕様別の対応が容易である。型を小さくすることが可能となり、コスト低減になる。
【0046】
前記伝動ケース4を鉄板材により、製作するときは、図15、及び図16で示す如く車軸5の近傍部は、別部品の車軸用ケース35として製作して、この車軸用ケース35を熔接等により、伝動ケース4の前方下部へ装着すると共に、ロータリ軸16の近傍部は、別部品のロータリ軸ケース36として製作して、このロータリ軸ケース36を熔接等により、伝動ケース4の後方下部へ装着した構成である。
【0047】
これにより、前記車軸5、及びロータリ軸16の近傍部を伝動ケース4とは、別部品として、車軸用ケース35と、ロータリ軸ケース36として製作して、伝動ケース4へ熔接等により、装着した構成としたことにより、プレス型を小型化することができる。又、強度アップを図ることができる。更に、仕様変更の対応が容易である。
【符号の説明】
【0048】
2 エンジン取付フレーム
3 エンジン
4 伝動ケース
6 走行輪
13 燃料タンク
14 操作ケース
15 ハンドル
16 ロータリ軸
17 ロータリ耕耘装置
18 正逆用耕耘爪
19 耕耘爪外パイプ部
19a 耕耘外パイプ
19b 爪ホルダ
20 耕耘爪内パイプ部
20a 耕耘内パイプ
20b 爪ホルダ
41 ロータリ軸
51 耕耘パイプ(連結軸)
53 爪ホルダ
54 正逆用耕耘爪
54´ 正逆用耕耘爪
【特許請求の範囲】
【請求項1】
ロータリ耕耘装置(17)の伝動ケース(40)の下部左右両側にロータリ軸(41)を突出し該軸(41)を正回転又は逆回転に切り換える切換操作部を備え、上記ロータリ軸(41)又は該ロータリ軸(41)と一体的に連結する連結軸(51,51)に正逆用耕耘爪(54)を取付け、ロータリ軸(41)の正転、逆転の切り換えによって普通耕耘か畝立作業かを選択するロータリ耕耘方法。
【請求項1】
ロータリ耕耘装置(17)の伝動ケース(40)の下部左右両側にロータリ軸(41)を突出し該軸(41)を正回転又は逆回転に切り換える切換操作部を備え、上記ロータリ軸(41)又は該ロータリ軸(41)と一体的に連結する連結軸(51,51)に正逆用耕耘爪(54)を取付け、ロータリ軸(41)の正転、逆転の切り換えによって普通耕耘か畝立作業かを選択するロータリ耕耘方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2010−46096(P2010−46096A)
【公開日】平成22年3月4日(2010.3.4)
【国際特許分類】
【出願番号】特願2009−271930(P2009−271930)
【出願日】平成21年11月30日(2009.11.30)
【分割の表示】特願2005−81513(P2005−81513)の分割
【原出願日】平成17年3月22日(2005.3.22)
【出願人】(000000125)井関農機株式会社 (3,813)
【Fターム(参考)】
【公開日】平成22年3月4日(2010.3.4)
【国際特許分類】
【出願日】平成21年11月30日(2009.11.30)
【分割の表示】特願2005−81513(P2005−81513)の分割
【原出願日】平成17年3月22日(2005.3.22)
【出願人】(000000125)井関農機株式会社 (3,813)
【Fターム(参考)】
[ Back to top ]