
ロータリ耕耘装置
【課題】耕耘作業時にロータリカバーの側板に圃場の泥土が付着することを防ぐロータリ耕耘装置を提供する。
【解決手段】耕耘爪軸30の端部に取付けられる偏心爪23の耕耘爪部を耕耘爪軸30の中央方向に傾斜させて、偏心爪23の耕耘爪部とロータリカバーの側板25との間隔が、相対的に、前記耕耘爪23の回転方向下流方向に向かって漸次広がるように構成した。
【解決手段】耕耘爪軸30の端部に取付けられる偏心爪23の耕耘爪部を耕耘爪軸30の中央方向に傾斜させて、偏心爪23の耕耘爪部とロータリカバーの側板25との間隔が、相対的に、前記耕耘爪23の回転方向下流方向に向かって漸次広がるように構成した。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、トラクタなどの作業車両の後方に連結されるロータリ耕耘装置に係り、詳しくは、耕耘爪及びその耕耘爪を覆うロータリカバーの構造に関する。
【背景技術】
【0002】
一般に、トラクタなどの作業車の後方に連結されて、圃場を耕耘するロータリ耕耘装置は、ロータリカバーに覆われた複数の耕耘爪を有している。この耕耘爪は、ロータリカバー内に配設された耕耘爪軸に取付けられており、該耕耘爪軸を回転駆動させることで耕耘爪を回転させて圃場面を耕耘する。
【0003】
従来から、耕耘爪軸の軸受部の下方の圃場面を耕耘するために、耕耘爪の基部より先がロータリカバーの側板側にオフセットした耕耘爪(いわゆる偏心爪)が、耕耘爪軸の両端に取付けられたロータリ耕耘装置が案出されている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開昭63−248301号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、特許文献1に記載のロータリ耕耘装置にあっては、偏心爪の耕耘爪部とロータリカバーの側板とが平行に配置されており、また側板と偏心爪との間隔(隙間)が狭いために、偏心爪が掻きだした圃場の泥土がロータリカバーの側板に付着してしまうことがある。かかる場合には、偏心爪と付着した泥土との摩擦による偏心爪の早期摩耗や、付着した泥土と偏心爪とが接触することで、偏心爪の回転低下によるパワーロスを生じる虞がある。また、側板と偏心爪との間に土塊などが詰まることがあり、土塊などが詰まると耕耘爪軸が回転駆動できなくなる場合があり、耕耘作業を行うことができなくなる虞もある。
【0006】
そこで、本発明は、耕耘爪軸の端部に取付けられる偏心爪とロータリカバーの側板との間隔を耕耘爪の回転方向下流に向かって漸次増加(広く)するように構成し、もって上記課題を解決したロータリ耕耘装置を提供する。
【課題を解決するための手段】
【0007】
本発明は、圃場面を耕耘する耕耘爪(22)と、該耕耘爪(22)が複数取付けられる耕耘爪軸(30)と、前記耕耘爪(22)の上方を覆う天板(26)及び前記耕耘爪(22)の側方を覆う側板(25)とを有してなるロータリカバー(21)と、を備えたロータリ耕耘装置(1)において、
前記耕耘爪(22)のうち前記耕耘爪軸(30)の端部に取付けられる耕耘爪(23,31)は、前記耕耘爪軸(30)に取付けられる基部(23a,31a)と、前記耕耘爪(23,31)を前記側板(25)側に偏移させるオフセット部(23g,31c)と、該オフセット部(23g,31c)から前記耕耘爪(23,31)の回転方向に向かって湾曲して延びる耕耘爪部(23d,31b)とを有し、
前記耕耘爪部(23d,31b)と前記側板(25)との間隔が、相対的に、前記耕耘爪(23,31)の回転方向下流方向に向かって漸次増加するように構成した、ことを特徴とする。
【0008】
前記耕耘爪軸(30)の端部に取付けられる前記耕耘爪(23)は、前記耕耘爪部(23d)が前記耕耘爪軸(30)の中央方向に傾斜している。
【0009】
前記耕耘爪軸(30)の端部に取付けられる前記耕耘爪(31)は、前記耕耘爪の基部(31a)が前記耕耘爪軸(30)に回転方向に対して傾斜して取付けられることで、前記耕耘爪部(31b)が、前記耕耘爪軸(30)の中央方向に傾斜している。
【0010】
前記側板(25)は、前記耕耘爪(31)の回転方向に対して傾斜して配設されている。
【0011】
なお、上記カッコ内の符号は、図面と対照するためのものであるが、これにより特許請求の範囲の記載に何等影響を及ぼすものではない。
【発明の効果】
【0012】
請求項1に係る発明によると、耕耘爪軸の端部に取付けられる耕耘爪とロータリカバーの側板との間隔が、相対的に、耕耘爪の回転方向下流側に向かって漸次増加するので、耕耘した圃場の泥土が側板に付着するのを抑えることができる。これにより、側板と耕耘爪部との間に土塊などが詰まることを防ぐことができると共に、側板に付着した泥土と耕耘爪部との摩擦による耕耘爪部の早期摩耗を防ぐことができる。また、側板に付着した泥土と耕耘爪部との摩擦によるパワーロスを防いで作業効率の向上を図ることができ、更には、ロータリカバー内の清掃を容易にすることができる。
【0013】
請求項2に係る発明によると、耕耘爪軸の端部に取付けられる耕耘爪の耕耘爪部を耕耘爪軸の中央方向に傾斜させたので、ロータリカバーの側板の配置を変えることなく、容易に耕耘爪軸の端部に取付けられる耕耘爪とロータリカバーの側板との間隔を、相対的に、耕耘爪の回転方向下流側に向かって漸次増加させることができる。
【0014】
請求項3に係る発明によると、耕耘爪軸の端部に取付けられる耕耘爪の基部を前記耕耘爪軸に回転方向に対して傾斜して取付けて、耕耘爪部を前記耕耘爪軸の中央方向に傾斜させたので、例えば、耕耘爪部自体が傾斜していない従来の耕耘爪(偏心爪)を用いて、容易に耕耘爪軸の端部に取付けられる耕耘爪とロータリカバーの側板との間隔を、相対的に、耕耘爪の回転方向下流側に向かって漸次増加させることができる。
【0015】
請求項4に係る発明によると、ロータリカバーの側板を耕耘爪の回転方向に対して傾斜して配設したので、耕耘爪を特殊な形状のものを用いたり、特別な取付けを行うことなく、容易に耕耘爪軸の端部に取付けられる耕耘爪とロータリカバーの側板との間隔を、耕耘爪の回転方向下流側に向かって漸次増加させることができる。
【図面の簡単な説明】
【0016】
【図1】本実施形態に係るロータリ耕耘装置の耕耘作業時の状態を示す側面図。
【図2】ロータリ耕耘装置の平面図。
【図3】ロータリ耕耘装置のロータリカバーの側面図。
【図4】耕耘爪を示す図であって、(a)は側面図であり、(b)は平面図であり、(c)は正面図である。
【図5】第1の実施の形態によるロータリ耕耘装置の耕耘作業時の状態を示す平面図。
【図6】第2の実施の形態によるロータリ耕耘装置の耕耘作業時の状態を示す平面図。
【図7】第3の実施の形態によるロータリ耕耘装置の耕耘作業時の状態を示す平面図。
【図8】ロータリ耕耘装置の耕耘作業時の状態を示す側面図。
【図9】(a)はロータリ耕耘装置のロータリカバーの断面側面図であり、(b)は泥付着防止板を固定する固定部材の断面側面図である。
【図10】ロータリ耕耘装置の耕耘作業時の状態を示す側面図。
【図11】(a)はツールバーとブラケットの連結部の構造を示す断面側面図であり、(b)はツールバーとブラケットとの連結部の構造を示す断面背面図である。
【図12】(a)はツールバーとブラケットとの連結部の構造を示す断面側面図であり、(b)はツールバーとブラケットとの連結部の構造を示す断面背面図である。
【図13】ロータリ耕耘装置を上昇させた非耕耘作業時の状態を示す側面図。
【発明を実施するための形態】
【0017】
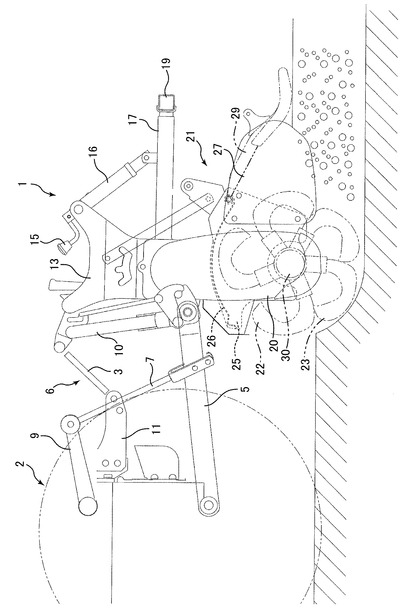
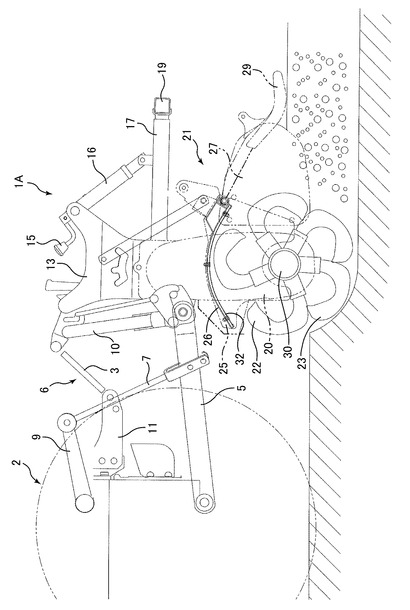
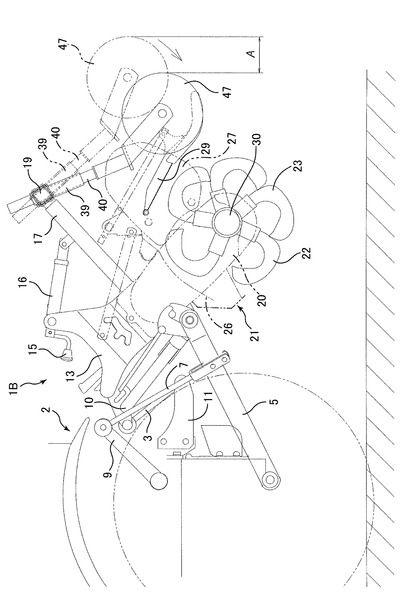
以下、図面に沿って、本発明に係るロータリ耕耘装置の実施形態について説明する。ロータリ耕耘装置1は、図1に示すように、1本のトップリンク3と左右二本のロアリンク5とからなる三点リンク機構6及びオートヒッチ10を介して牽引車両であるトラクタ2の機体後部に連結されている。トップリンク3は、トラクタ2の機体に設けられたブラケット11に連結されており、ロアリンク5は、左右のリフトロッド7を介して、リフトアーム9に連結されている。該左右のリフトロッド7の一方には、図示しない油圧シリンダが介在しており、ロータリ耕耘装置1は、該油圧シリンダの伸縮により揺動自在に連結されている。
【0018】
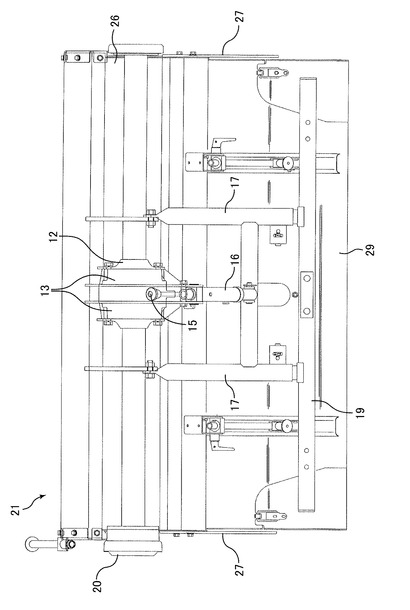
ロータリ耕耘装置1の中央部には、図2に示すように、トラクタ2のPTO軸(不図示)からの動力が入力されるギヤケース12が設けられており、該ギヤケース12の上方には、左右一対のトップマスト13が設けられている。該トップマスト13には、調整ハンドル15を備えた伸縮ロッド16の一端部が取付けられており、該伸縮ロッド16の他端部は、支持アーム17に取付けられている。該支持アーム17の一端部には、尾輪や畦立機などを取付けるツールバー19が取付けられている。
【0019】
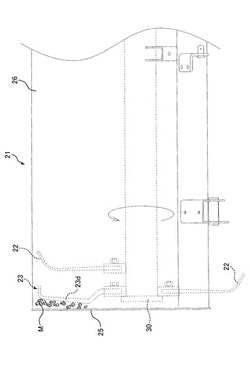
ギヤケース12の下方には、図1及び図2に示すように、ロータリカバー21が設けられている。該ロータリカバー21は、主に耕耘爪22上方を覆う天板26と耕耘爪22の側方を覆う左右の側板25から構成されており、該天板26に支持されて、圃場を均平にするためのリヤカバー29がロータリカバー21の後方に設けられている。また、ロータリカバーの左右の側板25には、リヤカバー29とロータリカバーとの側板25の空間を覆うためのリヤサイドカバー27が設けられている。
【0020】
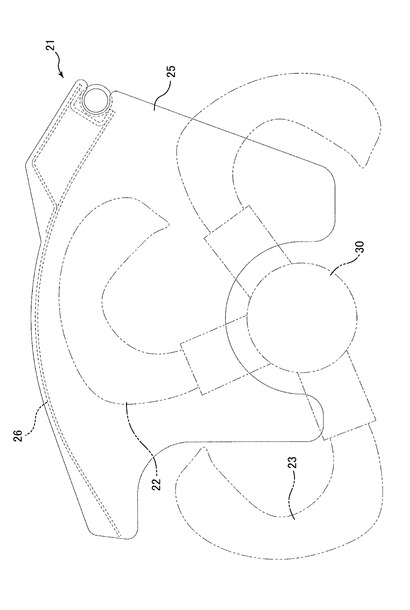
ロータリカバー21内には、耕耘爪軸30が回転自在に設けられており、該耕耘爪軸30には、図3に示すように、耕耘爪22が複数取付けられている。また、前記耕耘爪22のうちの該耕耘爪軸30の端部に取付けられている耕耘爪はオフセット配置された偏心爪23からなる。前記左右側板25の一方は、チェーンケース20に一体に取付けられており、該チェーンケース20内のチェーンケース等を介して、前記ギヤケース12からの動力が前記耕耘爪軸30に伝達される。
【0021】
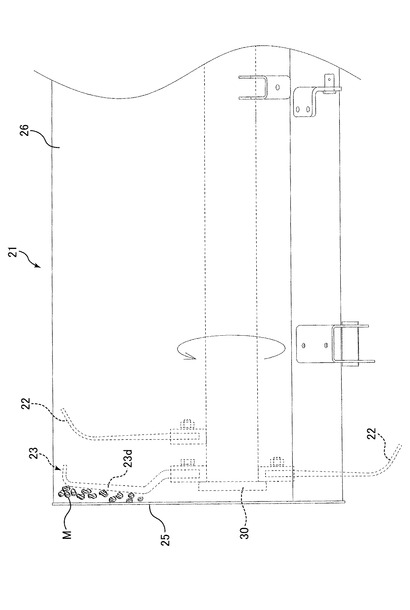
次に、第1の実施の形態による偏心爪23について説明する。ここで、偏心爪23とは、圃場面を耕耘する耕耘爪であって、耕耘爪軸30の端部に取付けられて、耕耘爪軸30を軸受けする軸受部の下方の圃場面を耕耘するものである。そして、偏心爪23は、図4(a)に示すように、側面視鉈形状で形成されており、矩形形状で形成された、偏心爪の基部であるベース部23aが形成されている。該ベース部23aの先には、図4(b)及び(c)に示すように、曲げ部23b,23cが設けられており、この曲げ部23b,23cが偏心爪23を側板25側に偏移させるオフセット部23gを構成している。該オフセット部23gより先は、耕耘爪23の回転方向に向かって湾曲して延びる耕耘爪部23dが形成されており、該耕耘爪部23dには、曲げ部23eが設けられている。耕耘爪部23dは、図4(b)に示すように、曲げ部23eから先の耕耘爪部23dが傾斜しており、偏心爪23は、図5に示すように、耕耘爪軸30に取付けられた際に、オフセット部23gから先の耕耘爪部23dが耕耘爪軸30の中央方向に傾斜している。この傾斜によって、耕耘爪軸30に取付けられた偏心爪23の耕耘爪部23dと側板25との間隔(隙間)は、オフセット部23gから回転方向下流方向に向かって漸次増加(広がる)している。また、耕耘爪部23dは、図4(c)に示すように、圃場の泥土を掻き出し易くするための傾斜部23fを有している。
【0022】
次に、上述のように構成されたロータリ耕耘装置1の動作について説明する。ロータリ耕耘装置1で圃場を耕耘するために、作業者は、ロータリ耕耘装置1をトラクタ2の後部に連結した後、耕耘作業を行う圃場まで移動する。そして、作業者が作業開始位置にロータリ耕耘装置を合わせて、トラクタ2のPTOクラッチを繋ぐと、エンジンの動力(回転)がPTO軸を介してロータリ耕耘装置1のギヤケース12内に伝達される。ギヤケース12内に伝達された回転は、チェーンケース20内のチェーン(不図示)を介して耕耘爪軸30に伝達され、耕耘爪軸30は、伝達された回転によって、図5に示す矢印の方向に回転する。耕耘爪22及び偏心爪23は、耕耘爪軸30の回転によって、圃場の泥土を砕土しながら土中に入り込み、砕土した土塊Mなどを掻き上げながら圃場を耕耘する。(図1参照)。
【0023】
上述のように、耕耘爪部23dと側板25との間隔を偏心爪23の回転方向下流側に向かって、漸次広くしたので、耕耘作業時に、偏心爪23が掻き上げた圃場の泥土が側板25に付着(固着)するのを抑えることができる。これにより、側板25と耕耘爪部23dとの間に偏心爪23で砕土した土塊M(図5参照)などが詰まることを防ぐことができると共に、側板25に付着した泥土と回転する偏心爪23の耕耘爪部23dとの摩擦による耕耘爪部23dの早期摩耗を防ぐことができる。また、側板25に付着した泥土と耕耘爪部23dとが摩擦することによるパワーロスを防いで作業効率の向上を図ることができ、更に、ロータリカバー21内の清掃時には、付着した側板の泥土を落とす手間が不要なので、清掃作業を容易にすることができる。
【0024】
また、耕耘爪軸30の端部に取付けられる偏心爪23の耕耘爪部23dを耕耘爪軸30の中央方向に傾斜させたので、側板25の配置を変えることなく、容易に耕耘爪軸30の端部に取付けられる偏心爪23の耕耘爪部23dとロータリカバーの側板25との間隔を、偏心爪23の回転方向下流側に向かって漸次広くすることができる。
【0025】
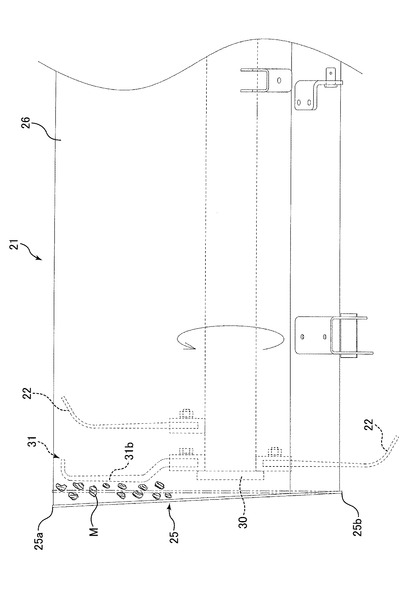
なお、本実施形態では、偏心爪23の耕耘爪部23dに曲げ部23eを設けて、偏心爪23を耕耘爪軸30に取付けた際に、耕耘爪部23dを耕耘爪軸30の中央方向に傾斜させることで、耕耘爪部23dと側板25との間隔を偏心爪23の回転方向下流側に向かって漸次広くする構成としたが、これに限らず、図6に示すように、オフセット部31cから先の耕耘爪部23d自体が傾斜していない、従来の偏心爪31のベース部31aを耕耘爪軸30の取付けホルダ30aに耕耘爪軸30の回転方向に対して傾斜させて取付けることで、耕耘爪部31bと側板25との間隔を偏心爪31の回転方向下流側に向かって漸次広くする構成でもよい(第2の実施の形態)。
【0026】
上述のように、偏心爪31のベース部31aを耕耘爪軸30の取付けホルダ30aに耕耘爪軸30の回転方向に対して傾斜して取付けたので、従来の偏心爪31を用いて、容易に耕耘爪部31bとロータリカバー21の側板25との間隔を偏心爪31の回転方向下流側に向かって漸次広くすることができる。
【0027】
また、耕耘爪軸30に取付ける偏心爪を従来の偏心爪31にすることができるので、新たに、偏心爪31に曲げ部を設けるなどの加工をする必要がなく、製造コストを抑えることができる。
【0028】
また、図7に示すように、側板25の前方側(進行方向の前側)端部25aを、側板25の後方側(進行方向の後側)端部25bに対して進行方向に直交する横方向に偏移させて配置することで、側板25を偏心爪31の回転方向に対して傾斜して配設して、耕耘爪部31bとロータリカバー21の側板25との間隔を耕耘爪の回転方向下流側に向かって漸次広くする構成でもよい(第3の実施の形態)。
【0029】
上述のように、側板25を偏心爪31の回転方向に対して傾斜して配設したので、耕耘爪軸30に偏心爪31を取付ける際に、偏心爪31を傾斜させることなく、容易に耕耘爪部31bとロータリカバー21の側板25との間隔を偏心爪31の回転方向下流側に向かって漸次広くすることができる。
【0030】
また、耕耘爪軸30に取付ける偏心爪を従来の偏心爪31にすることができるので、新たに、偏心爪31に曲げ部を設けるなどの加工をする必要がなく、製造コストを抑えることができる。
【0031】
次に、上述の実施形態とは異なる形態について図8及び図9に沿って説明する。ただし、上述の実施形態の同一の構成については、同一の番号を付して、その説明は省略する。
【0032】
ロータリカバー21の天板26の内側には、図8及び図9(a)に示すように、泥付着防止板32が一面に取付けられている。該泥付着防止板32はステンレス製であり、泥付着防止板32は、図9(a)に示すように、固定部材33により、上下方向に揺動自在で天板26に固定されている。
【0033】
固定部材33は、図9(b)に示すように、天板26及び泥付着防止板32に設けられた孔26a,32aを貫通すると共に、泥付着防止板32に溶接されたPボタン38と、該Pボタン38の先端に螺合するナット35と、該ナット35によって天板26及び泥付着防止板32に圧接するワッシャ36と、天板26と泥付着防止板32の間に配置されるスプリング37とから構成される。
【0034】
次に、上述のように構成された、ロータリ耕耘装置1Aの動作について説明する。ロータリ耕耘装置1Aは、図8に示すように、トラクタ2に牽引されて、耕耘爪22及び偏心爪23が回転しながら圃場面を耕耘する。耕耘爪22及び偏心爪23は、圃場の泥土を砕土しながら土中に入り込み、砕土した土塊Mなどを掻き上げながら耕耘する。この際、掻き上げられた土塊Mは、耕耘爪22及び偏心爪23の回転によって泥付着防止板32に押し付けられる。泥付着防止板32は、土塊Mが押し付けられると上方に揺動し、その後天板26と泥付着防止板32の間に配置されたスプリング37によって下方に揺動する。
【0035】
上述のように、ロータリカバー21の天板26の内側に、上下方向に揺動自在に泥付着防止板32を固定部材33で取付けたので、耕耘爪22及び偏心爪23によって泥付着防止板32に土塊Mが押し付けられても、土塊Mは泥付着防止板32に付着しにくくすることができる。
【0036】
また、泥付着防止板32は、耕耘作業中は上下に揺動(振動)するので、土塊Mが泥付着防止板32に付着しても、泥付着防止板32が振動することで剥がれ落ち易くすることができる。
【0037】
次に、上述の実施形態とは更に異なる形態について図10〜図13に沿って説明する。ただし、上述の実施形態の同一の構成については、同一の番号を付して、その説明は省略する。
【0038】
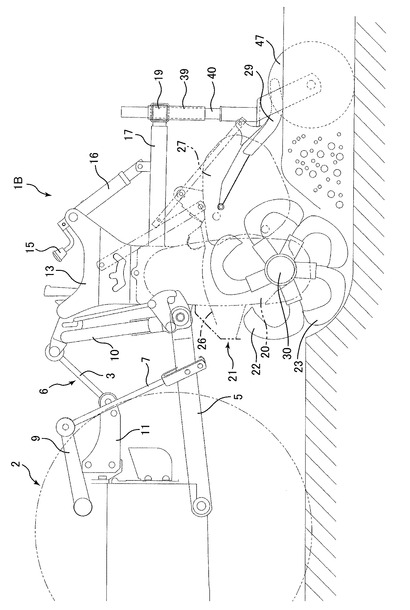
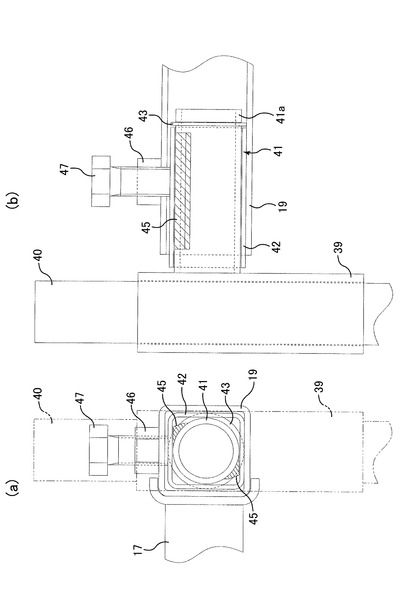
支持アーム17の一端部に取付けられたツールバー19には、図10に示すように、ブラケット39を介して支柱40に支持された尾輪47が取付けられている。該ブラケット39には、図11(b)に示すように、丸パイプ41が溶接されて垂直に取付けられており、該丸パイプ41は、角パイプ42に内挿されている。該丸パイプ41の先端部41aは、角パイプ42を貫通して突出しており、この先端部41aには、角パイプ42からの抜け防止のためのCリング43が取付けられている。また、丸パイプ41には、図11(a)に示すように、角パイプ42内で丸パイプ41の回転を規制するための規制部材45が対向して設けられている。角パイプ42は、ツールバー19に内挿されており、また、角パイプ42は、該ツールバー19の上面に溶接固定されたナット46に螺合するボルト47によって左右方向に移動可能に固定されている。
【0039】
次に、上述のように構成されたロータリ耕耘装置1Bの動作について説明する。作業者は、図10に示すように、耕耘する深さを調整するために尾輪47をツールバー19に取付けて、ロータリ耕耘装置1Bをトラクタ2で牽引して耕耘作業を行う。そして、枕地でトラクタ2を旋回させるために、作業者が三点リンク機構6を操作してロータリ耕耘装置1Bを上昇させると、丸パイプ41は、図12に示すように、角パイプ42内で回動する。丸パイプ41の回動によって、ブラケット39及び支柱40は、図12に示す矢印方向に回動する。すると、尾輪47は、図13に示すように、下方に向かって図13に示す矢印方向に移動し、規制部材45が角パイプ42内のパイプ面に当接すると、角パイプ42内での丸パイプ41の回動が規制されて丸パイプ41の回動が止まる。この丸パイプ41の回動が止まると、ブラケット39及び支柱40の回動も止まり、尾輪47は、図13に示すように、距離Aだけ移動して止まる。
【0040】
上述のように、尾輪47の支柱40を支持するブラケット39に取付けられた丸パイプ41をツールバー19内で回動自在に設けて、ロータリ耕耘装置1Bを上昇させた際に、尾輪47が前方に移動するようにしたので、旋回時におけるロータリ耕耘装置1Bを含めたトラクタ2の全長を、尾輪47を固定した場合に比して短くすることができる。これにより、トラクタ2の旋回半径も小さくなるので、枕地の未耕地を狭くすることができる。
【符号の説明】
【0041】
1 ロータリ耕耘装置
21 ロータリカバー
22 耕耘爪
23 耕耘爪(偏心爪)
23a 基部(ベース部)
23d 耕耘爪部
23g オフセット部
25 側板
26 天板
30 耕耘爪軸
31 耕耘爪(偏心爪)
31a 基部
31b 耕耘爪部
31c オフセット部
【技術分野】
【0001】
本発明は、トラクタなどの作業車両の後方に連結されるロータリ耕耘装置に係り、詳しくは、耕耘爪及びその耕耘爪を覆うロータリカバーの構造に関する。
【背景技術】
【0002】
一般に、トラクタなどの作業車の後方に連結されて、圃場を耕耘するロータリ耕耘装置は、ロータリカバーに覆われた複数の耕耘爪を有している。この耕耘爪は、ロータリカバー内に配設された耕耘爪軸に取付けられており、該耕耘爪軸を回転駆動させることで耕耘爪を回転させて圃場面を耕耘する。
【0003】
従来から、耕耘爪軸の軸受部の下方の圃場面を耕耘するために、耕耘爪の基部より先がロータリカバーの側板側にオフセットした耕耘爪(いわゆる偏心爪)が、耕耘爪軸の両端に取付けられたロータリ耕耘装置が案出されている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開昭63−248301号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、特許文献1に記載のロータリ耕耘装置にあっては、偏心爪の耕耘爪部とロータリカバーの側板とが平行に配置されており、また側板と偏心爪との間隔(隙間)が狭いために、偏心爪が掻きだした圃場の泥土がロータリカバーの側板に付着してしまうことがある。かかる場合には、偏心爪と付着した泥土との摩擦による偏心爪の早期摩耗や、付着した泥土と偏心爪とが接触することで、偏心爪の回転低下によるパワーロスを生じる虞がある。また、側板と偏心爪との間に土塊などが詰まることがあり、土塊などが詰まると耕耘爪軸が回転駆動できなくなる場合があり、耕耘作業を行うことができなくなる虞もある。
【0006】
そこで、本発明は、耕耘爪軸の端部に取付けられる偏心爪とロータリカバーの側板との間隔を耕耘爪の回転方向下流に向かって漸次増加(広く)するように構成し、もって上記課題を解決したロータリ耕耘装置を提供する。
【課題を解決するための手段】
【0007】
本発明は、圃場面を耕耘する耕耘爪(22)と、該耕耘爪(22)が複数取付けられる耕耘爪軸(30)と、前記耕耘爪(22)の上方を覆う天板(26)及び前記耕耘爪(22)の側方を覆う側板(25)とを有してなるロータリカバー(21)と、を備えたロータリ耕耘装置(1)において、
前記耕耘爪(22)のうち前記耕耘爪軸(30)の端部に取付けられる耕耘爪(23,31)は、前記耕耘爪軸(30)に取付けられる基部(23a,31a)と、前記耕耘爪(23,31)を前記側板(25)側に偏移させるオフセット部(23g,31c)と、該オフセット部(23g,31c)から前記耕耘爪(23,31)の回転方向に向かって湾曲して延びる耕耘爪部(23d,31b)とを有し、
前記耕耘爪部(23d,31b)と前記側板(25)との間隔が、相対的に、前記耕耘爪(23,31)の回転方向下流方向に向かって漸次増加するように構成した、ことを特徴とする。
【0008】
前記耕耘爪軸(30)の端部に取付けられる前記耕耘爪(23)は、前記耕耘爪部(23d)が前記耕耘爪軸(30)の中央方向に傾斜している。
【0009】
前記耕耘爪軸(30)の端部に取付けられる前記耕耘爪(31)は、前記耕耘爪の基部(31a)が前記耕耘爪軸(30)に回転方向に対して傾斜して取付けられることで、前記耕耘爪部(31b)が、前記耕耘爪軸(30)の中央方向に傾斜している。
【0010】
前記側板(25)は、前記耕耘爪(31)の回転方向に対して傾斜して配設されている。
【0011】
なお、上記カッコ内の符号は、図面と対照するためのものであるが、これにより特許請求の範囲の記載に何等影響を及ぼすものではない。
【発明の効果】
【0012】
請求項1に係る発明によると、耕耘爪軸の端部に取付けられる耕耘爪とロータリカバーの側板との間隔が、相対的に、耕耘爪の回転方向下流側に向かって漸次増加するので、耕耘した圃場の泥土が側板に付着するのを抑えることができる。これにより、側板と耕耘爪部との間に土塊などが詰まることを防ぐことができると共に、側板に付着した泥土と耕耘爪部との摩擦による耕耘爪部の早期摩耗を防ぐことができる。また、側板に付着した泥土と耕耘爪部との摩擦によるパワーロスを防いで作業効率の向上を図ることができ、更には、ロータリカバー内の清掃を容易にすることができる。
【0013】
請求項2に係る発明によると、耕耘爪軸の端部に取付けられる耕耘爪の耕耘爪部を耕耘爪軸の中央方向に傾斜させたので、ロータリカバーの側板の配置を変えることなく、容易に耕耘爪軸の端部に取付けられる耕耘爪とロータリカバーの側板との間隔を、相対的に、耕耘爪の回転方向下流側に向かって漸次増加させることができる。
【0014】
請求項3に係る発明によると、耕耘爪軸の端部に取付けられる耕耘爪の基部を前記耕耘爪軸に回転方向に対して傾斜して取付けて、耕耘爪部を前記耕耘爪軸の中央方向に傾斜させたので、例えば、耕耘爪部自体が傾斜していない従来の耕耘爪(偏心爪)を用いて、容易に耕耘爪軸の端部に取付けられる耕耘爪とロータリカバーの側板との間隔を、相対的に、耕耘爪の回転方向下流側に向かって漸次増加させることができる。
【0015】
請求項4に係る発明によると、ロータリカバーの側板を耕耘爪の回転方向に対して傾斜して配設したので、耕耘爪を特殊な形状のものを用いたり、特別な取付けを行うことなく、容易に耕耘爪軸の端部に取付けられる耕耘爪とロータリカバーの側板との間隔を、耕耘爪の回転方向下流側に向かって漸次増加させることができる。
【図面の簡単な説明】
【0016】
【図1】本実施形態に係るロータリ耕耘装置の耕耘作業時の状態を示す側面図。
【図2】ロータリ耕耘装置の平面図。
【図3】ロータリ耕耘装置のロータリカバーの側面図。
【図4】耕耘爪を示す図であって、(a)は側面図であり、(b)は平面図であり、(c)は正面図である。
【図5】第1の実施の形態によるロータリ耕耘装置の耕耘作業時の状態を示す平面図。
【図6】第2の実施の形態によるロータリ耕耘装置の耕耘作業時の状態を示す平面図。
【図7】第3の実施の形態によるロータリ耕耘装置の耕耘作業時の状態を示す平面図。
【図8】ロータリ耕耘装置の耕耘作業時の状態を示す側面図。
【図9】(a)はロータリ耕耘装置のロータリカバーの断面側面図であり、(b)は泥付着防止板を固定する固定部材の断面側面図である。
【図10】ロータリ耕耘装置の耕耘作業時の状態を示す側面図。
【図11】(a)はツールバーとブラケットの連結部の構造を示す断面側面図であり、(b)はツールバーとブラケットとの連結部の構造を示す断面背面図である。
【図12】(a)はツールバーとブラケットとの連結部の構造を示す断面側面図であり、(b)はツールバーとブラケットとの連結部の構造を示す断面背面図である。
【図13】ロータリ耕耘装置を上昇させた非耕耘作業時の状態を示す側面図。
【発明を実施するための形態】
【0017】
以下、図面に沿って、本発明に係るロータリ耕耘装置の実施形態について説明する。ロータリ耕耘装置1は、図1に示すように、1本のトップリンク3と左右二本のロアリンク5とからなる三点リンク機構6及びオートヒッチ10を介して牽引車両であるトラクタ2の機体後部に連結されている。トップリンク3は、トラクタ2の機体に設けられたブラケット11に連結されており、ロアリンク5は、左右のリフトロッド7を介して、リフトアーム9に連結されている。該左右のリフトロッド7の一方には、図示しない油圧シリンダが介在しており、ロータリ耕耘装置1は、該油圧シリンダの伸縮により揺動自在に連結されている。
【0018】
ロータリ耕耘装置1の中央部には、図2に示すように、トラクタ2のPTO軸(不図示)からの動力が入力されるギヤケース12が設けられており、該ギヤケース12の上方には、左右一対のトップマスト13が設けられている。該トップマスト13には、調整ハンドル15を備えた伸縮ロッド16の一端部が取付けられており、該伸縮ロッド16の他端部は、支持アーム17に取付けられている。該支持アーム17の一端部には、尾輪や畦立機などを取付けるツールバー19が取付けられている。
【0019】
ギヤケース12の下方には、図1及び図2に示すように、ロータリカバー21が設けられている。該ロータリカバー21は、主に耕耘爪22上方を覆う天板26と耕耘爪22の側方を覆う左右の側板25から構成されており、該天板26に支持されて、圃場を均平にするためのリヤカバー29がロータリカバー21の後方に設けられている。また、ロータリカバーの左右の側板25には、リヤカバー29とロータリカバーとの側板25の空間を覆うためのリヤサイドカバー27が設けられている。
【0020】
ロータリカバー21内には、耕耘爪軸30が回転自在に設けられており、該耕耘爪軸30には、図3に示すように、耕耘爪22が複数取付けられている。また、前記耕耘爪22のうちの該耕耘爪軸30の端部に取付けられている耕耘爪はオフセット配置された偏心爪23からなる。前記左右側板25の一方は、チェーンケース20に一体に取付けられており、該チェーンケース20内のチェーンケース等を介して、前記ギヤケース12からの動力が前記耕耘爪軸30に伝達される。
【0021】
次に、第1の実施の形態による偏心爪23について説明する。ここで、偏心爪23とは、圃場面を耕耘する耕耘爪であって、耕耘爪軸30の端部に取付けられて、耕耘爪軸30を軸受けする軸受部の下方の圃場面を耕耘するものである。そして、偏心爪23は、図4(a)に示すように、側面視鉈形状で形成されており、矩形形状で形成された、偏心爪の基部であるベース部23aが形成されている。該ベース部23aの先には、図4(b)及び(c)に示すように、曲げ部23b,23cが設けられており、この曲げ部23b,23cが偏心爪23を側板25側に偏移させるオフセット部23gを構成している。該オフセット部23gより先は、耕耘爪23の回転方向に向かって湾曲して延びる耕耘爪部23dが形成されており、該耕耘爪部23dには、曲げ部23eが設けられている。耕耘爪部23dは、図4(b)に示すように、曲げ部23eから先の耕耘爪部23dが傾斜しており、偏心爪23は、図5に示すように、耕耘爪軸30に取付けられた際に、オフセット部23gから先の耕耘爪部23dが耕耘爪軸30の中央方向に傾斜している。この傾斜によって、耕耘爪軸30に取付けられた偏心爪23の耕耘爪部23dと側板25との間隔(隙間)は、オフセット部23gから回転方向下流方向に向かって漸次増加(広がる)している。また、耕耘爪部23dは、図4(c)に示すように、圃場の泥土を掻き出し易くするための傾斜部23fを有している。
【0022】
次に、上述のように構成されたロータリ耕耘装置1の動作について説明する。ロータリ耕耘装置1で圃場を耕耘するために、作業者は、ロータリ耕耘装置1をトラクタ2の後部に連結した後、耕耘作業を行う圃場まで移動する。そして、作業者が作業開始位置にロータリ耕耘装置を合わせて、トラクタ2のPTOクラッチを繋ぐと、エンジンの動力(回転)がPTO軸を介してロータリ耕耘装置1のギヤケース12内に伝達される。ギヤケース12内に伝達された回転は、チェーンケース20内のチェーン(不図示)を介して耕耘爪軸30に伝達され、耕耘爪軸30は、伝達された回転によって、図5に示す矢印の方向に回転する。耕耘爪22及び偏心爪23は、耕耘爪軸30の回転によって、圃場の泥土を砕土しながら土中に入り込み、砕土した土塊Mなどを掻き上げながら圃場を耕耘する。(図1参照)。
【0023】
上述のように、耕耘爪部23dと側板25との間隔を偏心爪23の回転方向下流側に向かって、漸次広くしたので、耕耘作業時に、偏心爪23が掻き上げた圃場の泥土が側板25に付着(固着)するのを抑えることができる。これにより、側板25と耕耘爪部23dとの間に偏心爪23で砕土した土塊M(図5参照)などが詰まることを防ぐことができると共に、側板25に付着した泥土と回転する偏心爪23の耕耘爪部23dとの摩擦による耕耘爪部23dの早期摩耗を防ぐことができる。また、側板25に付着した泥土と耕耘爪部23dとが摩擦することによるパワーロスを防いで作業効率の向上を図ることができ、更に、ロータリカバー21内の清掃時には、付着した側板の泥土を落とす手間が不要なので、清掃作業を容易にすることができる。
【0024】
また、耕耘爪軸30の端部に取付けられる偏心爪23の耕耘爪部23dを耕耘爪軸30の中央方向に傾斜させたので、側板25の配置を変えることなく、容易に耕耘爪軸30の端部に取付けられる偏心爪23の耕耘爪部23dとロータリカバーの側板25との間隔を、偏心爪23の回転方向下流側に向かって漸次広くすることができる。
【0025】
なお、本実施形態では、偏心爪23の耕耘爪部23dに曲げ部23eを設けて、偏心爪23を耕耘爪軸30に取付けた際に、耕耘爪部23dを耕耘爪軸30の中央方向に傾斜させることで、耕耘爪部23dと側板25との間隔を偏心爪23の回転方向下流側に向かって漸次広くする構成としたが、これに限らず、図6に示すように、オフセット部31cから先の耕耘爪部23d自体が傾斜していない、従来の偏心爪31のベース部31aを耕耘爪軸30の取付けホルダ30aに耕耘爪軸30の回転方向に対して傾斜させて取付けることで、耕耘爪部31bと側板25との間隔を偏心爪31の回転方向下流側に向かって漸次広くする構成でもよい(第2の実施の形態)。
【0026】
上述のように、偏心爪31のベース部31aを耕耘爪軸30の取付けホルダ30aに耕耘爪軸30の回転方向に対して傾斜して取付けたので、従来の偏心爪31を用いて、容易に耕耘爪部31bとロータリカバー21の側板25との間隔を偏心爪31の回転方向下流側に向かって漸次広くすることができる。
【0027】
また、耕耘爪軸30に取付ける偏心爪を従来の偏心爪31にすることができるので、新たに、偏心爪31に曲げ部を設けるなどの加工をする必要がなく、製造コストを抑えることができる。
【0028】
また、図7に示すように、側板25の前方側(進行方向の前側)端部25aを、側板25の後方側(進行方向の後側)端部25bに対して進行方向に直交する横方向に偏移させて配置することで、側板25を偏心爪31の回転方向に対して傾斜して配設して、耕耘爪部31bとロータリカバー21の側板25との間隔を耕耘爪の回転方向下流側に向かって漸次広くする構成でもよい(第3の実施の形態)。
【0029】
上述のように、側板25を偏心爪31の回転方向に対して傾斜して配設したので、耕耘爪軸30に偏心爪31を取付ける際に、偏心爪31を傾斜させることなく、容易に耕耘爪部31bとロータリカバー21の側板25との間隔を偏心爪31の回転方向下流側に向かって漸次広くすることができる。
【0030】
また、耕耘爪軸30に取付ける偏心爪を従来の偏心爪31にすることができるので、新たに、偏心爪31に曲げ部を設けるなどの加工をする必要がなく、製造コストを抑えることができる。
【0031】
次に、上述の実施形態とは異なる形態について図8及び図9に沿って説明する。ただし、上述の実施形態の同一の構成については、同一の番号を付して、その説明は省略する。
【0032】
ロータリカバー21の天板26の内側には、図8及び図9(a)に示すように、泥付着防止板32が一面に取付けられている。該泥付着防止板32はステンレス製であり、泥付着防止板32は、図9(a)に示すように、固定部材33により、上下方向に揺動自在で天板26に固定されている。
【0033】
固定部材33は、図9(b)に示すように、天板26及び泥付着防止板32に設けられた孔26a,32aを貫通すると共に、泥付着防止板32に溶接されたPボタン38と、該Pボタン38の先端に螺合するナット35と、該ナット35によって天板26及び泥付着防止板32に圧接するワッシャ36と、天板26と泥付着防止板32の間に配置されるスプリング37とから構成される。
【0034】
次に、上述のように構成された、ロータリ耕耘装置1Aの動作について説明する。ロータリ耕耘装置1Aは、図8に示すように、トラクタ2に牽引されて、耕耘爪22及び偏心爪23が回転しながら圃場面を耕耘する。耕耘爪22及び偏心爪23は、圃場の泥土を砕土しながら土中に入り込み、砕土した土塊Mなどを掻き上げながら耕耘する。この際、掻き上げられた土塊Mは、耕耘爪22及び偏心爪23の回転によって泥付着防止板32に押し付けられる。泥付着防止板32は、土塊Mが押し付けられると上方に揺動し、その後天板26と泥付着防止板32の間に配置されたスプリング37によって下方に揺動する。
【0035】
上述のように、ロータリカバー21の天板26の内側に、上下方向に揺動自在に泥付着防止板32を固定部材33で取付けたので、耕耘爪22及び偏心爪23によって泥付着防止板32に土塊Mが押し付けられても、土塊Mは泥付着防止板32に付着しにくくすることができる。
【0036】
また、泥付着防止板32は、耕耘作業中は上下に揺動(振動)するので、土塊Mが泥付着防止板32に付着しても、泥付着防止板32が振動することで剥がれ落ち易くすることができる。
【0037】
次に、上述の実施形態とは更に異なる形態について図10〜図13に沿って説明する。ただし、上述の実施形態の同一の構成については、同一の番号を付して、その説明は省略する。
【0038】
支持アーム17の一端部に取付けられたツールバー19には、図10に示すように、ブラケット39を介して支柱40に支持された尾輪47が取付けられている。該ブラケット39には、図11(b)に示すように、丸パイプ41が溶接されて垂直に取付けられており、該丸パイプ41は、角パイプ42に内挿されている。該丸パイプ41の先端部41aは、角パイプ42を貫通して突出しており、この先端部41aには、角パイプ42からの抜け防止のためのCリング43が取付けられている。また、丸パイプ41には、図11(a)に示すように、角パイプ42内で丸パイプ41の回転を規制するための規制部材45が対向して設けられている。角パイプ42は、ツールバー19に内挿されており、また、角パイプ42は、該ツールバー19の上面に溶接固定されたナット46に螺合するボルト47によって左右方向に移動可能に固定されている。
【0039】
次に、上述のように構成されたロータリ耕耘装置1Bの動作について説明する。作業者は、図10に示すように、耕耘する深さを調整するために尾輪47をツールバー19に取付けて、ロータリ耕耘装置1Bをトラクタ2で牽引して耕耘作業を行う。そして、枕地でトラクタ2を旋回させるために、作業者が三点リンク機構6を操作してロータリ耕耘装置1Bを上昇させると、丸パイプ41は、図12に示すように、角パイプ42内で回動する。丸パイプ41の回動によって、ブラケット39及び支柱40は、図12に示す矢印方向に回動する。すると、尾輪47は、図13に示すように、下方に向かって図13に示す矢印方向に移動し、規制部材45が角パイプ42内のパイプ面に当接すると、角パイプ42内での丸パイプ41の回動が規制されて丸パイプ41の回動が止まる。この丸パイプ41の回動が止まると、ブラケット39及び支柱40の回動も止まり、尾輪47は、図13に示すように、距離Aだけ移動して止まる。
【0040】
上述のように、尾輪47の支柱40を支持するブラケット39に取付けられた丸パイプ41をツールバー19内で回動自在に設けて、ロータリ耕耘装置1Bを上昇させた際に、尾輪47が前方に移動するようにしたので、旋回時におけるロータリ耕耘装置1Bを含めたトラクタ2の全長を、尾輪47を固定した場合に比して短くすることができる。これにより、トラクタ2の旋回半径も小さくなるので、枕地の未耕地を狭くすることができる。
【符号の説明】
【0041】
1 ロータリ耕耘装置
21 ロータリカバー
22 耕耘爪
23 耕耘爪(偏心爪)
23a 基部(ベース部)
23d 耕耘爪部
23g オフセット部
25 側板
26 天板
30 耕耘爪軸
31 耕耘爪(偏心爪)
31a 基部
31b 耕耘爪部
31c オフセット部
【特許請求の範囲】
【請求項1】
圃場面を耕耘する耕耘爪と、該耕耘爪が複数取付けられる耕耘爪軸と、前記耕耘爪の上方を覆う天板及び前記耕耘爪の側方を覆う側板とを有してなるロータリカバーと、を備えたロータリ耕耘装置において、
前記耕耘爪のうち前記耕耘爪軸の端部に取付けられる耕耘爪は、前記耕耘爪軸に取付けられる基部と、前記耕耘爪を前記側板側に偏移させるオフセット部と、該オフセット部から前記耕耘爪の回転方向に向かって湾曲して延びる耕耘爪部とを有し、
前記耕耘爪部と前記側板との間隔が、相対的に、前記耕耘爪の回転方向下流方向に向かって漸次増加するように構成した、
ことを特徴とするロータリ耕耘装置。
【請求項2】
前記耕耘爪軸の端部に取付けられる前記耕耘爪は、前記耕耘爪部が前記耕耘爪軸の中央方向に傾斜している、
請求項1に記載のロータリ耕耘装置。
【請求項3】
前記耕耘爪軸の端部に取付けられる前記耕耘爪は、前記耕耘爪の基部が前記耕耘爪軸に回転方向に対して傾斜して取付けられることで、前記耕耘爪部が、前記耕耘爪軸の中央方向に傾斜している、
請求項1に記載のロータリ耕耘装置。
【請求項4】
前記側板は、前記耕耘爪の回転方向に対して傾斜して配設されている、
請求項1に記載のロータリ耕耘装置。
【請求項1】
圃場面を耕耘する耕耘爪と、該耕耘爪が複数取付けられる耕耘爪軸と、前記耕耘爪の上方を覆う天板及び前記耕耘爪の側方を覆う側板とを有してなるロータリカバーと、を備えたロータリ耕耘装置において、
前記耕耘爪のうち前記耕耘爪軸の端部に取付けられる耕耘爪は、前記耕耘爪軸に取付けられる基部と、前記耕耘爪を前記側板側に偏移させるオフセット部と、該オフセット部から前記耕耘爪の回転方向に向かって湾曲して延びる耕耘爪部とを有し、
前記耕耘爪部と前記側板との間隔が、相対的に、前記耕耘爪の回転方向下流方向に向かって漸次増加するように構成した、
ことを特徴とするロータリ耕耘装置。
【請求項2】
前記耕耘爪軸の端部に取付けられる前記耕耘爪は、前記耕耘爪部が前記耕耘爪軸の中央方向に傾斜している、
請求項1に記載のロータリ耕耘装置。
【請求項3】
前記耕耘爪軸の端部に取付けられる前記耕耘爪は、前記耕耘爪の基部が前記耕耘爪軸に回転方向に対して傾斜して取付けられることで、前記耕耘爪部が、前記耕耘爪軸の中央方向に傾斜している、
請求項1に記載のロータリ耕耘装置。
【請求項4】
前記側板は、前記耕耘爪の回転方向に対して傾斜して配設されている、
請求項1に記載のロータリ耕耘装置。
【図1】


【図2】
【図3】
【図4】

【図5】
【図6】

【図7】
【図8】
【図9】

【図10】
【図11】
【図12】

【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2013−63056(P2013−63056A)
【公開日】平成25年4月11日(2013.4.11)
【国際特許分類】
【出願番号】特願2011−204755(P2011−204755)
【出願日】平成23年9月20日(2011.9.20)
【出願人】(000001878)三菱農機株式会社 (1,502)
【Fターム(参考)】
【公開日】平成25年4月11日(2013.4.11)
【国際特許分類】
【出願日】平成23年9月20日(2011.9.20)
【出願人】(000001878)三菱農機株式会社 (1,502)
【Fターム(参考)】
[ Back to top ]