
ロード・マップ補正フィードバック補正付密結合GPSおよび推定車両航法
【課題】車両における全地球測位システム(GPS)および推測航法(DR)の密結合の組合せのためのロード・マップ補正フィードバックを提供する。
【解決手段】ロード・マップ補正フィードバック補正付密結合GPSおよび推定車両航法は、車両ネットワーク上の車輪速度トランスデューサのデータを収集し、車両レンジおよび針路を演算する。現在の航法解に合うような道路セグメントのデータベースは、DVDディスク内のロードマップで提供される。推測航法は、GPS信号伝送がトンネル、駐車場および他の一般的な状況で失われるときに生じる航法解におけるギャップを埋める。ロードマップフィッティング制御は、推測航法のみが長時間作動した際に蓄積されるドリフトを制御する。
【解決手段】ロード・マップ補正フィードバック補正付密結合GPSおよび推定車両航法は、車両ネットワーク上の車輪速度トランスデューサのデータを収集し、車両レンジおよび針路を演算する。現在の航法解に合うような道路セグメントのデータベースは、DVDディスク内のロードマップで提供される。推測航法は、GPS信号伝送がトンネル、駐車場および他の一般的な状況で失われるときに生じる航法解におけるギャップを埋める。ロードマップフィッティング制御は、推測航法のみが長時間作動した際に蓄積されるドリフトを制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、カーナビゲーションシステムに関し、特に、車両における全地球測位システム(GPS)受信器および推測航法(DR)の密結合の組合せのためのロード・マップ補正フィードバックに関する。
【背景技術】
【0002】
ストリートマップ表示を備えたGPSナビゲーションシステムは、現在、世界中の殆どの新しい車両において広く利用可能である。新しい地図の更新は、DVDディスクで購入およびインストールされ、毎年、1年単位で発行されるようである。これらの車両において使用される典型的なGPS航法受信器は、良い環境では数十メートルの正確さであるが、密集した都会環境では100メートルに低下することがある。これらのカーナビゲーションシステムは、車両が地図上の道路を走行することを想定しており、従って、地図情報を使用して最寄りの道路の正確な経路に車両位置アイコンをスナップするが、GPS受信が、トンネルおよび駐車場内で同じように失われる場合、地図表示装置スクリーン上のユーザ位置は単に更新されない。
【0003】
工場でインストールされたナビゲーションシステムは、補修部品市場の携帯型ナビゲーション装置と比較して、より高い信頼性および精度を提供することを一般には期待されている。運転手は、単にトンネルまたは駐車場に入ることに起因する長い起動時間または航法失敗を容認しないであろう。従って、従来の工場でインストールされたナビゲーションシステムは、速度計、走行記録計、ジャイロおよび加速度計などの慣性センサ、ならびに速度、前進/後進、および走行距離情報にアクセスするための車両データ・バスに接続されている。しかしながら、慣性センサは、より高いコストを強いることになる。
【0004】
従来のシステムにおいて任意の針路情報を得ることは、高価で繊細な直接結合された自動車用ジャイロスコープがインストールされていることを必要とする。SiRFテクノロジー社(カリフォルニア州サンホセ)は、この比較的高価なセンサを排除し、その代りに他の車両サブシステムから既に利用可能なセンサ・データを使用するものと彼らが言うところの解を販売している。SiRF社によれば、センサ・データ測定は、推測航法に対して意味のある情報を抽出するために十分に正確でなければならず、センサ測定には、十分な周波数が提供されなければならず、また、推測航法システムへのセンサ・データ配送における如何なる遅れも短くなければならず、例えば10ミリ秒以下の待ち時間である。
【0005】
北米およびヨーロッパにおける殆どの新しい自動車は、車速センサおよびアンチロック・ブレーキ・システム(ABS)を標準的設備としての装備している。コンパスは、ヨーロッパよりも米国でより頻繁に見られるが、安定性制御は、米国よりもヨーロッパにおいてより一般的である。そのような推測航法ソフトウェアは、特定のセンサの様々な利用可能性を考慮に入れなければならない。初期のSiRFdrive1.0は、直接結合のジャイロスコープを備えた車両プラットフォームに対して構成され、後期のSiRFdrive2.0は、分散型ABSモジュール・センサ・データを代わりに使用している。SiRFdrive2.0は、個々の車輪速度を演算してその回転速度と共に車両110の速度を判断し、その結果、高価なジャイロスコープを排除することができる。SiRFdrive2.0の推測航法システムは、プレス・リリースには、各車輪からの車輪回転の刻み(tick)(つまり、速度パルス)を収集するものとして記述されている。それは、正確な推測航法に必要なキャリブレーション値をさらに判断する。車輪刻みデータの分解能が良いほど(例えば、1回転当たりの車輪パルスの数が多いほど)、全体的な推測航法性能は良くなる。
【0006】
車輪回転刻みデータは、車両バスから直接読まれるので、車輪センサ自体に接続する必要性は見られなかった。しかしながら、生のABSデータの使用は、それほど容易ではない。最大の針路変化は、低速で道の交差点を曲がるときに通常生じるため、推測航法は低速で最も高い分解能を必要とする。ABSモジュールの主な機能は、高速時に強い制動系が適用されるときに生じる個々の車輪のロックを制御することである。従って、幾つかのABSモジュールは、それらが持つ最大の分解能での測定値を送らず、車輪センサABSモジュールは、低速時に不正確なデータを出力するか、またはデータをまったく出力しないことがある。これらの事例では、ABSソフトウェアは、通常アップグレードされ、必要な解と、推測航法アプリケーションによって必要とされる低速データ出力とを提供することができる。広告文献では、SiRFdrive2.0が高度なアルゴリズムを有し、そのようなデータ損失が低車速での精度を有した悪影響を最小限にすると言っている。
【0007】
不運にも、そのような車輪刻みによる駆動の推測航法システムは、それらの約束に応えていない。依然として必要なのは、GPSと推測航法とを組み合わせて、実際に動作する自己キャリブレーションおよび補正アルゴリズムを備えた実用的なシステムである。
【発明の開示】
【0008】
簡潔には、本発明のロード・マップ補正フィードバック補正付密結合GPSおよび推定車両航法は、一実施形態において、車両ネットワーク上の車輪速度トランスデューサのデータを収集し、車両レンジおよび針路を演算する。車両搭載のDVDに記憶されたロードマップは、道路セグメントのデータベースである。推測公報解に対して、推測航法は、GPS信号伝送がトンネル、駐車場および他の一般的な状況において失われるときに生じる航法解におけるギャップを埋める。車輪半径の連続的なキャリブレーションおよび速度効果に対する補償は、GPS fixから演算され、それは、GPS信号受信の長い休止期間(アウテージ)中の推測航法性能および精度を改善する。GPS信号が回復されるとき、本推測航法解は、周囲を探索するGPS受信器のための高品位な開始点を提供する。ロードマップフィッティング制御は、推測航法のみが長時間作動した際に蓄積されるドリフトを制御する。
【図面の簡単な説明】
【0009】
本発明の上記および更なる目的、特徴および利点は、特に添付図面と併用される場合に、その特定の実施形態の次の詳細な記述を考慮して明白となる。
【図1】車両バス・ネットワークを備えた四輪車両用の本発明の密結合GPSおよび推測航法システムの実施形態の機能ブロック図である。
【図2】図1のGPS受信器および推測航法(DR)コンピュータの組合せの2つの可能性のある実施の機能ブロック図である。
【図3】図1に示されるシステム用途のための、図2(a)および(b)におけるような、様々なハードウェアおよびソフトウェアで実施されることができる本発明のGPS、DRおよびマップマッチング複合システムの実施形態の機能ブロック図である。
【図4】図1、図2(a)および(b)のような密結合GPSおよび推測航法システムの動作のスタートアップ、運転および終了段階を示す段階図である。
【図5】図1、図2(a)および(b)のような密結合GPSおよび推測航法システムの様々なキャリブレーション状態間の移行を示すフローチャートである。
【図6】推測航法単独モード、複合モード、およびGPS単独モードにおける相互関係を制御するfixモード状態機械のフローチャートである。
【図7】図1のような車両用の密結合GPSおよび推測航法システムの機能ブロック図である。
【図8】車輪半径における速度効果を示すグラフである。
【図9】デルタ針路キャリブレーションで使用する、2つの連続したGPS針路観測の差を示すグラフである。
【図10】測位fixと、その測位fixに対応するフィードバックの関係を示すスケジュール図である。
【図11】フィードバックが有効でDR推測航法に用いられるかどうかを判別するフローチャートである。
【図12】フィードバックが有効でDR推測航法に用いられるかどうかを判別するフローチャートである。
【発明を実施するための最良の形態】
【0010】
図1は、一般的な参照数字100によってここで参照される、本発明のGPSおよび推測航法(DR)の組合せの実施形態を表わしている。GPSおよび推測航法の組合せ100は、ユーザにディスプレイ102上で航法情報を提供する。ロード・マップ・ディスクおよびプレーヤ103は、地方の道路に関して現在のユーザ位置を表示する。GPS受信器104は、アンテナ106を通じてマイクロ波衛星伝送にチューニングして追跡し、推測航法(DR)コンピュータ108によって演算されるキャリブレーションされた「デルタ針路(delta-heading)」および「デルタレンジ(delta-range)」情報に密結合される。「デルタ」の用語は、車両110の針路(つまり、方向)がどのように時間と共に変わったか、あるいは、レンジ(つまり、距離)がどのように同一の期間で変わったかを表わす。
【0011】
GPS受信器104とロード・マップ・ディスクおよびプレーヤ103は、DRコンピュータ108によって伝えられる推定値をキャリブレーションするのに有用なデータを提供する。GPS受信器104は、絶対的な位置および針路決定を提供し、それに対して、DRコンピュータ108は、推測航法解に到達するためのそのキャリブレーションしたデルタ針路およびデルタレンジの演算結果を加えることができる。ロード・マップ・ディスクおよびプレーヤ103は、推測航法解に対して道路セグメントフィードバックを提供し、長時間のGPS停止期間により、推測航法解の小さい誤差が蓄積して、道路セグメントからドリフトすることを防止します。
【0012】
DRコンピュータ108とロード・マップ・ディスクおよびプレーヤ103は、GPS受信器が著しく長い時間、fixを提供しておらず、衛星追跡をすべて失った場合に、著しくドリフトしないであろう非常に正確な推測航法解を提供する。さらに、推測航法解は、DRが比較の際に利用可能な場合に位置不確実性の大きい増加が大幅に減じられるときに信号の受信が回復される場合に、GPS受信器104を速く再稼動させるのに非常に有用である。これは、DRが車両移動を測定することができる一方で、スタンドアローンのGPS受信器は、コード探索および周波数探索の量に影響するその位置不確実性を促進する最悪のケースの移動を想定しなければならない。図2(a)および(b)は、GPS受信器104およびDRコンピュータ108を実施することができる2つの方法を示唆している。図2(a)では、軌道上の航行衛星は、マイクロ波信号を送信し、それは、アンテナ202によって受信され、航法測定プラットフォーム(MP)204(例えば、シリアル出力を備えたeRide社(カリフォルニア州サンフランシスコ)のOPUS-III nanoRide GPSモジュール)によって復調される。MP204は、航法ソフトウェアがホストプロセッサ上で実行されるタイプであり、32チャネル無線周波数(RF)受信器206、ベースバンド208、およびSAWフィリタリング・ステージを備えている。MP204は、静止衛星型衛星航法補強システム(SBAS)を備えた2チャネルのリアルタイム・ディファレンシャルGPSの機能を有している。シリアル・インタフェース210は、USB、RS-232、または同様のラインベースのインタフェースであることができる。ホストプロセッサ212は、ユーザアプリケーション214を実行するものであり、GPS、DR、およびアプリケーション・プログラミング・インタフェース(API)ライブラリを備えたクライアント・ソフトウェア216をホストする予備処理能力を有している。機能API218は、ユーザに対する表示のための航法解の通信を可能にし、CANbusインタフェース222は、CANbus224から車輪刻み情報を受け付ける。
【0013】
図2(b)において、GPS受信器104およびDRコンピュータ108は、位置、速度、時間(PVT)モジュール250で実施される。例えば、eRide社(カリフォルニア州サンフランシスコ)のePV3600を使用することができる。これは、完全なGPS/AGPS PVT受信器であり、44,000個の有効な補正器を備えたeRide社のOPUSIIIベースバンド・プロセッサを備えており、オンチップROMおよびSRAMを備えたARM7TDMI-S(登録商標)ベースのCPUと結合される。それは、下側-161dBmまでの信号を取得し、追跡することができ、従って、屋内でも動作することができる。ePV3600は、ePR3036のGPS-RFフロントエンドチップから単一の低いRF入力を取り込む(RFステージ206およびベースバンド・ステージ208と等価)。埋め込まれたマイクロコントローラ(CPU)252は、外部のパラレル・フラッシュ・メモリ、またはオンチップのROMメモリもしくはパラレル・フラッシュ・メモリから動作する。ライブラリ216における装置GPSファームウェアは、捕捉、トラッキング、ならびに、位置、速度、およびタイミングのデータ出力を扱う。UART254およびシリアル双方向インタフェース256は、「NMEA」および他のアプリケーションに接続するシリアル・インタフェース・プロトコルをサポートする。CANbus車輪刻み258は、別のUART260によって受信される。
【0014】
NMEA文は、データ・タイプと呼ばれる第1語を含んでおり、それは、文の残りがどのようにして解釈されるかを定義している。GGA文(表I)は、本質的なfixデータの例である。他の文は、幾らか同一の情報を繰り返すことがあるが、新しいデータも供給する。データを読むことができる如何なる装置も、それが興味を有しているデータ文をスクリーニングすることができる。GPSを制御するための命令はなく、それは、たとえその多くが無視されたとしても有しているデータを単にすべて送信する。傍受側は自身のチェックサムを演算し、正しくないチェックサムを持つ如何なるデータも無視する。NMEA標準は、海洋用途で使用されるすべての種類の装置に対する文を定義している。GPS受信器と関係する文はすべて、「GP」で始まる。
【0015】
所謂NMEA0183標準は、単純なASCIIのシリアル通信プロトコルを使用し、データが単一の「発信側」から多数の「傍受側」に「文」でどのように送信されるかを定義している。中間のエキスパンダにより、発信側は、殆ど無制限に多くの傍受側に送信することができ、また、マルチプレクサを使用して、複数のセンサが、単一のコンピュータ・ポートに発信することができる。サードパーティー・スイッチが利用可能であり、それは、プライマリが故障した場合に自動障害迂回によってプライマリおよびセカンダリ発信側を確立することができる。上記標準は、ホストCPUアプリケーション層における各文(メッセージ)の種類の内容を定義し、その結果、傍受側はすべて、メッセージを正確に解析することができる。
【表1】

【0016】
図1において、車両110は、2つの前側の、操舵可能な車輪112および114、ならびに2つの後ろ側の、操舵しない車輪116および118を有している。なお、所定の旋回に対して、内側の車輪の旋回半径は、外側の車輪の旋回半径よりも遥かに小さくなければならない。その理由から、演算が複雑であり、操舵角に依存するので、前側の操舵輪から針路およびレンジ情報を導き出すことは実用的ではない。
【0017】
図1における各車輪には、アンチロック・ブレーキング・システム(ABS)トランスデューサ120,122,124,および126が取り付けられている。これらのトランスデューサは、場合によっては車輪速度センサ(WSS)と呼ばれ、車輪の旋回と共に電子パルス(つまり、「刻み(tick)」)を生成する。幾つかのそのようなトランスデューサは、車輪回転を測定するために、可変磁気抵抗および光学検出器などを使用する。可変磁気抵抗WSSは、多くの場合、ホイール・ロータに取り付けられた刻み目付きの「トーン・ホイール」を使用し、可変オーディオ・トーンに似たデジタル電気出力を生成する。車輪がロックした場合、デジタル・パルスは停止し、ABSコントローラ128は、道路に対する4つのタイヤのトラクションを回復しようとするその車輪のブレーキ・キャリパへの油圧を遮断するように作用する。
【0018】
ABSセンサ情報、およびデジタル・パケット形式の多くの他の車両データは、業界標準のCANbus130によって通信される。推測航法コンピュータ108は、ノード132,134,136,および138からCANbus130上の車輪回転の刻み情報を受信する。
【0019】
コントローラ・エリア・ネットワーク(CAN)は、車両バス標準であり、マイクロコントローラおよび装置がホスト・コンピュータまたは何千もの個々のワイヤのない車両において互いに通信することを可能にする。CAN仕様書は、ロバート・ボッシュ社(ドイツ国シュツットガルト)によって1991年に発行された。www.can.bosch.com/docu/can2spec.pdfを参照
【0020】
データ・トラフィックは、単一の双ワイヤ・バス(CANbus130)上に多重化され、エンジン管理、車体制御、伝送制御、アクティブ・サスペンション、自動防護装置、環境制御およびセキュリティ情報交換を含むことができる。CANは、今ではOBD-II車両診断において標準であり、1996年以降に米国で製造されたすべての車両および軽トラックにおいて義務付けられている。欧州の車載故障診断機(EOBD)標準は同様であり、2001年以降に欧州連合で販売されたすべてのガソリン車両および2004年以降のすべてのディーゼル車に義務化されている。
【0021】
CANネットワーク中のトランスミッタは、ネットワーク中の他のすべてのノードにメッセージをブロードキャストする。各メッセージは、固有の種類識別子を有しており、その結果、メッセージは、それらに適切であるか否かをノードが識別することができる。これらの識別子は、さらにメッセージ・プライオリティ・フィールドを含んでおり、その結果、CANネットワークは、衝突するメッセージ間の優先順位を調停することができる。典型的なCANの実施は、双ワイヤ・バスを使用し、1メガビット/秒の最大データ転送速度を有している。CANbusデータ形式は、各データ・パケットに組み込まれた拡張誤差チェック能力を有している。そのプロトコルは、バス上のメッセージの衝突を自動的に扱い、その結果、より高い優先順位のメッセージが、より低い優先順位のメッセージの前に移ることを可能にする。複数のコントローラは、同一のバス上に配置されることがあり、それによって、車両110における配線量およびコネクタ数を減少させる。これは、付加的なモジュールが推測航法コンピュータ108のように従来の車両ネットワークに、より容易に付加されることも意味している。
【0022】
CANbus130がアイドル状態の場合は常に、如何なるユニットもメッセージの送信を開始することが可能である。複数のユニットがメッセージを同時に送信開始する場合、バス・アクセスの衝突は、識別子を使用してビット単位の調停によって解決される。調停メカニズムは、情報も時間も失われないことを保証する。同一の識別子を持ったデータ・フレームおよびリモート・フレームが同時に開始される場合、データ・フレームは、リモート・フレームに勝つ。調停中に、すべてのトランスミッタは、送信されたビットのレベルをバス上で監視されるレベルと比較する。これらのレベルが等しい場合、ユニットは送り続けることが可能である。「劣勢」レベルが送られ、「優勢」レベルが監視されている場合、ユニットは調停を失っており、これ以上何も送らずに取消さなければならない。CANbus130は、キャリービットへの単一チャネルを備え、そこから、データ再同期情報が導き出される。チャネルの実施は、本明細書中で指示されておらず、従って単一のワイヤに接地、2つの異なるワイヤ、光ファイバなどを加えることを可能にする。
【0023】
操舵しない左右の車輪の刻みセンサ124および126からの情報は、車両110の基本デルタレンジおよびデルタ針路を導き出すために使用される。上記車輪の回転はそれぞれ、アンチロック・ブレーキ・システム(ABS)128によって監視されるトランスデューサ・パルスの固定値を生じさせる。
【0024】
推測航法コンピュータ128によって所定周期で収集された左右の操舵しない車輪の回転刻み回数の算術平均は、車輪周長または直径が或る正確さで知られている場合に正確なデルタレンジ測定を生じさせることができる。その同一の期間に亘ってGPS受信器104から得られた距離情報は、進行中および連続的な自己キャリブレーションに使用される。
【0025】
左右の操舵しない車輪間の回転刻み回数の差は、同様に車輪周長または直径が正確に知られている場合にデルタ針路測定値に比例する。車輪116および118の周長または直径の如何なる誤差または変化も、勿論、デルタ針路およびデルタレンジの推定値における対応する誤差を生じさせる。車輪、特にそれらのタイヤは、速度、タイヤ空気圧、温度、磨耗、荷重、或る故障、およびアフターサービス操作と共に、その直径を著しく変化させることがある。
【0026】
デルタ針路およびデルタレンジの推定値における実質的な階段的な誤差が車両110の移動の際に生じる場合がある一方で、推測航法コンピュータ108またはCANbus130は、車両110がエンジンを動かさずに転がっている場合などに停止される。そのような種類の誤差は、車両110全体がトレーラまたはフェリーで輸送される場合に起こる可能性がある。
【0027】
従来のシステムは、デルタ針路およびデルタレンジの推定値における誤差を非常に良く管理もしていなければ制御もしていなかった。本発明の実施形態は、次に記述される技術によって先行技術からこれらに関して区別される。
【0028】
推測航法コンピュータ108は、デルタレンジおよびデルタ針路の測定値を自動的に積分する。それは、ローカル・レベル(北、東)座標のパケットで表現された推測航法の推定値へのスタート位置および針路から受信する。初期のデルタレンジおよびデルタ針路の条件は、GPS受信器104によってルーチン的に提供される位置および速度データから得られる。
【0029】
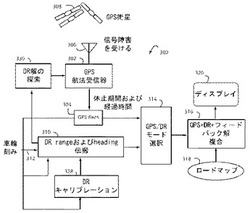
図3は、図1に示した用途に対して、図2(a)および2(b)におけるように実施されることができるGPS、DRおよびマップマッチング複合システム300を示している。システム300は、アンテナ306が多数の軌道上のGPS衛星308からマイクロ波信伝送を受信することができない場合に休止期間(アウテージ)および経過時間に依存したGPS測位器304を生じさせるGPS受信器302を備えている。推測航法伝搬プロセッサ310は、左側および右側の回転がそれぞれ回転する数に比例する車輪刻み312を車両の車輪から受信する。モード選択器314は、複合器316においてGPS単独、DR単独、またはGPSおよびDRの航法解の複合を出力するか否かを選択する。ロード・マップ・ディスクおよびプレーヤ318は、ユーザ位置ディスプレイ320に道路のグラフィックを提供し、道路セグメント情報を装置322に提供する。従来の実務は、GPS位置解がそこになくても、道路上の最寄りの地点に、表示されたユーザ位置を視覚的に「スナップする」ものである。
【0030】
ここで、フィードバック時間-位置(TP)構造324は、マッチした道路に最も近い適当な位置に、GPSおよびDR推測航法解合成316をスナップするための情報を提供する。GPSおよびDR推測航法解合成316をGPS解にリセットする為に、良好なGPS解を利用できる場合に、通常のTP構造326が用いられる。
【0031】
DRキャリブレーション328は、車輪半径の推定値、ならびに、回転、速度、および直線運転に亘って生じる個々の車輪半径の差に関する初期の進行中のキャリブレーションを含んでいる。推測航法伝搬プロセッサ310は、予備のGPS測位器304から反映およびキャリブレーションされる車輪刻み312からレンジおよび方位を演算するためにこれらのキャリブレーションを使用する。
【0032】
GPS測位器304において長い時間が経過すると、GPS航法受信器302は、GPS衛星308を再び取得するために広い探索を通常行なわなければならない。しかし、ここでは、DRレンジおよび針路伝搬プロセッサ310は、GPS休止期間の多くを、マッピングフィードバック324の助けを借りて位置解の演算継続に費やす。従って、これらの推定した時間および位置解は、現在のDR解の探索の初期設定を開始するための、GPS航法受信器302に対する指示330に含まれている。指示330の利点は、一般に再捕捉をスピードアップさせるためにそれを使用することができ、また、高速移動車両の用途においてより実用的な高感度探索を行なうことができるということである。
【0033】
従って、GPS受信器302は、利用可能な多数の有効な補正器(44,000個以上)を使用して並列で独立した前提を探索するように構成されている。GPS受信器302における有効な補正器のうちの幾つかは、非常に密結合な方法で推測航法解を探索し、その結果、推測航法データが正しい場合、再捕捉時間が最小限にされる。推測航法データが低い信頼性である場合、それは、代わりの前提を同時に探索することができる。後者の場合、GPS受信器302は、推測航法単独モード314の長い休止期間の後で、または、例えば、フェリーボートの長く管理されていない航路を補正するための長い電力オフ期間の後で、素早く回復するのを助けるために使用される。
【0034】
毎秒1回のfix(1Hz)の推測航法に対しては、10Hzの車輪回転刻みの観測は、GPS受信器104または302によって生じるGPS fixと同一の1秒fix間隔に同期される。そのような同期は、セレクタ314において推測航法単独、GPS単独、および複合モードの動作間で切り換える場合に、fix間の一定期間を維持する。車輪回転刻みに基づいたデルタレンジおよびデルタ針路は、1秒GPSエポック毎に測定される。絶対針路は、初期の針路基準と共にデルタ針路を積分することにより得られる。
dead-reckoning-heading = heading-offset + sum (delta-heading)
【0035】
その後、東および北の方角の如何なる変化も次の式によって判断することができる。
Delta-East = delta-range * sin (dead-reckoning heading);
Delta-North = delta-range * cos (dead-reckoning heading)
【0036】
最後に、
East position = initial east position + Sum (Delta-East);
North position = initial north position + Sum (delta-North)
である。推測航法測定およびキャリブレーション・パラメータは、次のようなものである。
delta-range = BL * CL + BR*CR;
delta-heading = AL * CL - AR*CR;
Heading = Heading-offset + sum delta-heading
【0037】
ここで、
CL,CR:1000ミリ秒などの指定期間に亘る左右の車輪のそれぞれに対してCANbusパケットに蓄積された刻み(tick)の回数。車輪回転刻みは、CANbusパケットの内容が蓄積された数であるので、現在およびそれ以前のCANbusパケットを区別することによって生成される。
BL,BR:左右の車輪のdelta-range/tickに対するキャリブレーション・パラメータ(単位:mm/tick)。
AL,AR:左右の車輪のdelta-heading/tick差に対するキャリブレーション・パラメータ(単位:分/tick=角度*60/tick)。
Heading-offset:sum delta-headingを既知の針路基準に平行移動させるキャリブレーション・パラメータ。
【0038】
従って、有効なキャリブレーションは、BL,BR(単純に「B」およびdBとして再マッピングされる)、AL,AR(つまり、単純に「A」およびdA)、および針路オフセット(heading-offset)の推定値を必要とする。GPS受信器104または302は、たとえその衛星伝送の受信が遮断されていないときであっても、それがデルタレンジ(delta-range)、デルタ針路(delta-heading)、および絶対針路の正確な測定値を提供することができるので、キャリブレーション・データの基準源としてに使用される。
【0039】
キャリブレーション・パラメータは、車両110の物理的な属性(例えば、物理的パラメータ)の既知の関係から初期化される。これらの物理的パラメータは、ここでは、左右車輪半径(Rl,Rr:Wheel Radius)、車輪の間のトラック幅距離(TW:Track Width)、およびカウント数または1回転当たりに生じる刻み(CPR)として定義される。
【0040】
車両110の回転では、旋回軌道に沿った距離は、旋回半径および角度変化の積である(例えば、ラジアンでの変更針路)。回転半径(turn radius)は、道路サイズと関係があり、未知である。
delta-range = turn radius * delta-Heading;
(単位:メートルおよびラジアン)
【0041】
生成された車輪回転刻みは、移動距離および1メートル当たりの刻み回数の積に比例する。
Count = delta-range * CPR (ticks / rotation) / [2PI wheel radius];
(単位:刻み(tick)およびメートル)
【0042】
従って、
(Count / CPR) * 2PI * wheel radius = turn radius * delta-Heading
である。
【0043】
左への旋回では、例えば、右車輪の旋回半径は、[左車輪の旋回半径+トラック幅]と等しくなる。従って、左右のデルタレンジ数式の差を取ると、旋回半径は消去され、次のものが残る。
CL / CPR * 2 * PI * Rl- CR / CPR * 2 * Rr = TW * delta-Heading
【0044】
並べ替えると、角度での針路変化(delta-heading)は、次のようになる。
delta-heading = Rl / CPR / TW * 360 * CL - Rr / CPR / TW * 360 * CR
検査すると、次のようになる。
AL = Rl / CPR / TW * 360 (degree / tick);
AR = Rr / CPR / TW * 360 (degree / tick)
【0045】
数値の正確さは、分の単位(例えば、角度(degree)*60)でパラメータを推定することによって改善される場合がある。従って、ALおよびARは、次のように演算される。
AL = Rl / CPR / TW * 360 * 60 (minutes / tick);
AR = Rr / CPR / TW * 360 * 60 (minutes / tick)
【0046】
ここでは、左右の車輪の回転刻みは、針路変化を表わし、左右の車輪の回転刻みの平均は、車両110の中心のデルタレンジを表わしている。
delta-range = R1 / CPR * PI * CL + Rr / CPR * PI * CR
【0047】
検査すると、
BL = Rl / CPR * PI (meters / tick);
BR = Rr / CPR * PI (meters / tick)
である。ミリメートルでこの係数を推定すると、数値の正確さを改善する。
【0048】
従って、BLおよびBRは、次のように演算される。
BL = Rl / CPR * PI * 1000 (millimeters / tick);
BR = Rr / CPR * PI * 1000 (millimeters / tick)
【0049】
表IIは、17インチの車輪半径、84インチのトラック幅、および1車輪回転当たり200回の刻みを持った典型的な車両110の物理的パラメータおよびそれらの対応するキャリブレーション・パラメータを示している。表II中の例は、一方の車輪(左)が他方の車輪(右)よりも僅かに大きい現実的な状況を表わしている。キャリブレーション・パラメータは、次に示す単位である。
【表2】
【0050】
キャリブレーションおよび物理的パラメータが得られた後で、付加的なパラメータ(ここでは、「針路オフセット(heading-offset)」と呼ばれる)は、実際に推測航法を開始するために必要とされる。針路オフセット・パラメータは、GPSアンテナ106の十分な運動がキャリブレーションに使用されることができるデータを生成する場合にリアルタイムで単に決定されることができる。
【0051】
GPS針路は、毎秒、atan(東速度/北方速度)としてのGPS速度ベクトルから演算され、真北が0°、真南が180°である。推測航法からのデルタ針路は、毎秒、パラメータALおよびARによって計られる車輪回転刻みの差から測定される。合計推測航法デルタ針路(dead-reckoning-delta-heading-sum)は、すべての推測航法デルタ針路(dead-reckoning delta-headings)の合計である。このパラメータのプロファイルは、真の針路の変化と一致するが、積分定数によって真の針路から逸れていく。推測航法針路は、合計推測航法デルタ針路と、針路オフセットと呼ばれる最終パラメータとの合計である。
【0052】
針路オフセットは、GPS針路と合計推測航法デルタ針路との間の任意の差である。針路オフセットは、固定値であると予想できるが、実際には、それは、CANbusデータの安定性および精度/利用可能性ならびにキャリブレーション精度に依存してドリフトする。fixセッション中またはfixセッション間の如何なる失われたCANbusパケットも、針路オフセットにおける推定不可能な誤差をもたらすことがある。個々のメーカの車輪刻みセンサの特異性は、針路オフセットの安定性にも影響することがある。
【0053】
GPS速度が0を超えるときはいつでも、GPS受信器104または302は、針路オフセットの推定値の更新を継続する。このように、システム100は、任意の異常な車輪刻み条件から素早く回復することができる。
【0054】
針路オフセットとすべての推測航法デルタ針路の合計との両方は、対として不揮発性メモリに保持されなければならず、その結果、推測航法は、電源ON直後に利用可能となる。例えば「駐車場モード」では、データ対は、GPS推測航法セッションの開始時にフェッチされる。図4を参照。これは、データ対が永続停止命令を使用してすべてのセッションの終了時に適切に保存されなければならないことを示唆している。
【0055】
「駐車場開始」は、推測航法がGPS受信器104または302の開始直後に開始されるモードであり、前のキャリブレーションは、演算されており、今度は例えば不揮発性メモリから取り出される。駐車場開始は、車両110が駐車場内で起動し、GPS受信が良好でない場合に有用である。
【0056】
駐車場開始は、特別なGPSのOFF命令を、前のシャットダウン時に実行しなければならなかったことを要求する。このOFF命令は、ここでは「永続的なシャットダウン」命令と呼ばれる。受信した場合、ビットは、駐車場開始が次のGPS-onイベントで実行されることを示す様々なキャリブレーション・パラメータで不揮発性メモリに格納される。GPS受信器104または302がセッション間に移動されていないと想定することが合理的である。そのような必須条件が満たされる場合、新しいセッションがその始めから正確であると看做すことができる。なぜならば、前の位置および針路が新しいセッションに対して有効な開始条件を提供したからである。
【0057】
針路オフセットとすべての推測航法デルタ針路のデータの合計との精度および正確さは、車両110が移動しているときに生成されるすべてのCANbusデータへの属し方に依存する。従って、車両110が駐車されて移動しなくなった後で、GPS受信器104または302は、単にOFFにされるべきである。GPS受信器104または302は、車両110が再び移動する前に、起動して実行することを可能にされるべきであり、従って、GPSは、CANbus130上の重要なCANbusデータを受信およびバッファすることを逃さない。
【0058】
CANbusデータは、短い休止期間またはギャップが認識され、補正されることができるように、リアルタイムでタイムスタンプを押されなければならない。データは、適切にタイムスタンプをデータに押さずに、GPS受信器104または302に非同期に収集され、押し込まれてはならない。GPSシステムおよびCANbus時間領域の密共有は、本発明の実施形態においては必要ではない。収集されたCANbusデータ上のタイムスタンプは、タイムスタンプのノイズを減少させるべく、また、GPSとCANbusのクロックと間の任意の時間ドリフトの影響を弱めるべく、補間および平均化される。
【0059】
幾つかの推測航法の実施形態は、10Hzの車輪回転刻みのみを受け入れることができ、従って、タイムスタンプの誤差は、50ミリ秒未満であるべきである。タイムスタンプにおける推奨変化は、10ミリ秒未満の標準偏差を有するべきである。
【0060】
GPS針路の迅速な利用可能性は、どのくらい速くまた正確にシステム100がキャリブレーションし、CAN休止期間、車輪のスリップ、または他の異常なイベントから復帰することができるかの重大な要因である。針路を最初に利用可能にすることは、他のすべてのキャリブレーション・パラメータを演算するために必要である。
【0061】
基本的な最悪のケースの針路誤差モデル(単位:度(degree))は、arctan(速度誤差/速度)として演算される。針路は、車両110が移動していない場合にはGPS受信器104または302によって判断されることができない。なぜならば、その比が任意に一周して元に戻るからである。しかしながら、速度推定値の精度に依存して、また、任意の速度誤差の大きさに依存して、低速での針路を判断することは可能である。速度誤差は、GPSキャリアのドップラー測定ノイズを水平精度低下率(HDOP)に乗じたものとしてモデル化される。
【0062】
ドップラー測定ノイズは、信号強度または信号対雑音比(SNR)に主として依存する。「都会の峡谷」における反射信号によって生じる如何なる干渉も、真の測定誤差を増大させ、速度および針路誤差をもたらす。GPS受信器104または302は、その測定値からそのような誤差を除去するために頻繁に動作している。
【0063】
4つの異なる信号条件に対する保守的な針路誤差モデルは、
44dB-Hzの望ましいモデル、
34dB-Hzの望ましくないモデル、
28dB-Hzの金属化した車室およびレンジのモデル、および
24dB-Hzの別の仕様外モデル
であり、HDOP=6と仮定した推定速度誤差は、それぞれ、0.02,0.2,1.2,および2km/hrである。
【0064】
その簡単な概要は、
針路誤差 < 44dBhz、2km/hrで1°;
針路誤差 < 34dBhz、12km/hrで1°;
針路誤差 < 28dBhz、23km/hrで3°;
針路誤差 < 24dBhz、40km/hrで3°である。
【0065】
本発明のアルゴリズムの実施形態は、これらのモデルを使用し、どの針路がキャリブレーション・パラメータに含めることができるかを判断するために針路自体の安定性を観測する。
【0066】
針路オフセットは、速度が最良の条件で20km/hr以上ある限り、5秒以内に判断されるべきである。28dB-Hzの平均SNRによって特徴づけられる金属化された車室については、パラメータは、依然としてより低いスピードでキャリブレーションするが、精度が下がる。しかしながら、連続的なフィルタリングが、針路誤差を減少させるために使用されることができる。
【0067】
「永続的停止」と呼ばれる停止命令は、ここで定義され、図6で言及される。それは、GPS受信器104または302を停止し、また、或るfixセッションから次のfixセッションへと針路キャリブレーションを保存するためにフラグとして使用され、電源OFF期間に亘ってギャップを埋める。永続的停止は、無秩序なシャットダウンを避けるために必要である。従来の実施では、通常の停止命令が出され、車両110は、次の開始命令を得る前に再び移動することができる。結果として、最後の位置および針路は、もはや有効ではない。従って、ここでは、針路オフセットは、一般的な停止命令に対して無効と宣言される。永続的なシャットダウンは、車両110が止まっており、次の「開始」命令が受信されるまで再び移動しないことを示すために、起動されるべきである。
【0068】
幾つかの従来のコード・ライブラリは、前の実行情報を持ったGPSコアを初期化する前にGPS受信器104または302にCANbusデータを送ることができない必要がある。如何なるCANbusデータも、キャリブレーションされないそのようなCANbusデータを宣言するメモリからキャリブレーションを読む前に受信される。CANbusデータは、前の実行データが読まれるまで無視される。ここでは、CANbusデータのタイミングと前の実行ファイルの受信とに制限はない。つまり、データは、キャリブレーションが受信されると直ぐに処理され、針路オフセットは、もしそれが以前に利用可能であったならば維持される。
【0069】
図4は、GPS受信器の開始および永続的停止のCANbusデータのフローおよびタイミングの関係を表わしている。動作には3段階401〜403がある。段階401では、GPS受信器104または302は、OFFであるが、CANbus130からのCANbusデータは存在する。データは、たとえそれがまだ開始していなくても、通常の方法でGPS受信器104または302に提示されることができる。ステップ410は、エンジンON命令を受信し、これは、航法が必要となることを意味している。ステップ412は、ホストCPU(図7参照)を起動し、CANbusデータの受信を開始する。ステップ414は、前の実行情報への不揮発性(NV)メモリにおけるポインタを持ったホストCPUで動作するGPSアプリケーションを提供する。ステップ416は、車両モデルおよび構成に対して一般的な初期の工場製造時のパラメータをロードする。ステップ418は、START命令によってGPSアプリケーションおよびハードウェアを起動し、不揮発性メモリに読み込む。ステップ420は、不揮発性メモリの読込みおよび書込みを表わしている。
【0070】
前の実行データは、CANフローチャートの段階401における推測航法中には保存されない。セクタの消去が、利用可能な記憶領域が消費されるときに最終的には必要となるが、そのような消去は、CANbusデータの入力に推測航法システムが遅れずについていくことを困難にする。なぜならば、消去が行なわれている間、セクタの消去は、システム指示バスを独占するからである。セッション中の前の実行の記憶は、無意味である。なぜならば、唯一の有効な記憶時間は、車両110が停止され、次のfixセッションまで再び移動しないときである。そうでなければ、次の駐車場セッションの精度を維持することは不可能である。
【0071】
段階402では、GPS受信器104または302は起動され、推測航法がステップ422で利用可能である。段階402は、ステップ424がエンジンOFF命令を受信したときに終了する。
【0072】
段階403では、GPS受信器104または302は、ステップ426における永続的なシャットダウン命令で停止される。ステップ428は、DR伝搬データを持った不揮発性メモリの更新を表わしている。CANbusデータは、依然としてGPS受信器104または302に達することがあるが、それらは無視される。
【0073】
図5は、キャリブレーション・データの様々なソースをGPS受信器104または302によって提供されるリアルタイムのキャリブレーションと継続的に混合する進行中のキャリブレーション処理500を表わしている。これは、GPSおよび推測航法の密結合をなす。リアルタイムのキャリブレーションの貢献は、Status-1、Status-3、Status-4、およびStatus-7のレベルを有しているキャリブレーション・ステータス全体の信頼レベルを増加させる。例えば、パラメータBは2を加え、パラメータAは1を加え、針路オフセットは4を加えるキャリブレーションする。最も高い信頼レベル(Status-7)は、望ましい状態であり、唯一、推測航法の結果がユーザに利用可能である。
【0074】
工場パラメータと部分的なキャリブレーションとの間で迷うことはない。工場キャリブレーションは、前の実行データが空であるかまたはクリアされたときに、前の実行データを入力する。従って、実際のキャリブレーションが初期の製造時の値に基づいた所期の推定値に追いつき始めるので、キャリブレーションのStatus-7は失われない。製造データがリアルタイム・データと混合するので、最初の完全なキャリブレーションに先立つ部分的なキャリブレーションは失われない。製造時の推定値がすべてリアルタイムのデータで上書きされるまで、この処理は継続する。
【0075】
ステップ502では、前の実行または工場パラメータがない場合、推測航法ステータス・パラメータは、「0」から、パラメータがキャリブレーションされていない初期状態に進められる。ステップ504では、ステータスは、「2」へと増加し、ここでは、デルタレンジ「B」のキャリブレーション・パラメータがキャリブレーションされ、左右の車輪の半径および比が判断される。ステップ506では、デルタ針路およびデルタレンジ「A」のキャリブレーション・パラメータ、ならびに物理的パラメータであるトラック幅(TW)がキャリブレーションされたときに、推測航法ステータス・パラメータは「3」に増加する。デルタレンジは、デルタ針路をキャリブレーションする前にキャリブレーションされなければならない。
【0076】
ステップ508では、針路オフセット、デルタ針路およびデルタレンジがキャリブレーションされるときに、推測航法ステータス・パラメータが「7」に増加する。車輪半径、比およびトラック幅がGPSデータから有効になったので、推測航法および複合モードは、ステップ510で利用可能である。
【0077】
ステップ512では、キャリブレーションが前のセッションから利用可能であり、不揮発性メモリから取り出される場合、推測航法およびキャリブレーションはその開始点から継続する。ステップ514では、前にStatus-7に達し、前のセッションが永続停止命令で終了した場合、推測航法は、ステップ510で直ちに利用可能である。キャリブレーション・パラメータがステップ518でGPSデータによって有効になった場合、複合モードは、ステップ516で利用可能である。
【0078】
代替のキャリブレーション方法は、ホストのアプリケーション・プログラミング・インタフェース(API)に依存する(図7参照。例えば、工場パラメータ・モードまたは製造時モード)。殆どのユーザは、推測航法を可及的速やかに利用可能にしておくことを好む。ステップ520では、前の実行データが空であるかまたは不在である場合、そのような工場パラメータ・モードは、車輪半径、トラック幅およびCPRに対して、近似した初期の物理的パラメータを提供する。これらの物理的パラメータは、AおよびBキャリブレーション・パラメータに変換され、それによって、キャリブレーションStatus-3を生じさせる。毎秒3m以上のGPS針路についての簡潔な観測だけが、キャリブレーションをStatus-7に上げるために必要であり、次いで、推測航法が利用可能になる。
【0079】
API工場パラメータ・モードで最も高い推測航法精度(Status-7)を期待することは非現実的である。なぜならば、車輪比およびトラック幅は、個々の車両110に対して工場で十分にキャリブレーションされることができないからである。車輪半径の比およびトラック幅は、1%の誤差よりも良いと知られていなければならない。GPS受信器104または302によって提供される経験的な測定値は、十分に良い測定値を得るための実用的な答えである。このような理由から、複合モードの動作は、フルセットのキャリブレーション・パラメータがGPSキャリブレーション・データを使用して正確に判定されるまで延期しなければならない。
【0080】
ステップ520の製造時モードで開始する典型的なシーケンスは、初期状態としてStatus-3から開始される。左右の車輪の半径およびトラック幅がキャリブレーションされる場合を想定する。製造時モードは、各車輪に対して異なる半径を指定することができない。従って、複合モードは、キャリブレーションが確認されるまで利用可能ではない。Status-7は、針路オフセットがキャリブレーションされたときに生じる。推測航法が利用可能になり、さらに、複合モードが、キャリブレーションがステップ518で確認された後にのみ利用可能である。確認は、冷間始動時のキャリブレーションと同一の条件を必要とする。
【0081】
パラメータA、パラメータB、および針路オフセットに対するキャリブレーション情報を提供するのに十分な、GPS受信器104または302を動作させるために必要な少数の最低車両駆動要件がある。これらは、表IIIに要約されている。これらは、図5におけるステップ522および524にも反映されている。
【表3】
【0082】
連続的なキャリブレーションは、車両110の寿命を最も長くする。生データが予めフィルタリングされ、各キャリブレーション・パラメータの主カルマン・フィルタ推定器で処理される前に確認される。一般に、良いキャリブレーションは、前の実行データが(例えば、不揮発性メモリに)維持される限り、永久に維持されることができる。前の実行データが完全に失われた場合、元の製造時の値は、開始点として使用されることができ、その結果、推測航法が可及的速やかに利用可能となることができる。
【0083】
キャリブレーション・ステータスをStatus-7以下に低下させる或る条件が存在する。まず、表IVにおいて要約するように、車輪回転刻み(CANbusデータ)に誤りが存在する場合がある。
【表4】
これらの種類のCAN誤りは、基本的にStatus-3にキャリブレーション・ステータスを低下させる。従って、AおよびBキャリブレーションは失われない。推測航法および複合モードは、誤りが補正され、新しい針路キャリブレーションが達成された後で直ぐに利用可能である。
【0084】
また、キャリブレーション・ステータスがキャリブレーションの誤りによって低下する可能性がある。アルゴリズムは、これらの発生をそれらが非常に稀になるまで最小限にするように構築されるべきである。高度なプレフィルタ・ロジックは、上記条件が無秩序にまたはノイズ・キャリブレーション測定で生じさせないように実施される。キャリブレーションの誤りを生じさせる最も可能性のあるイベントは、工場での正しくないキャリブレーションである(表V参照)。
【表5】
【0085】
図6は、fixモード状態機械600と、GPS資産および車輪データ・キャリブレーションの利用可能性に依存した、推測航法単独モード601、複合モード602、およびGPS単独モード603間の相互関係を示している。fixモード状態機械600は、図3におけるモード選択器314を実施するために使用されることができる。
【0086】
推測航法単独モード601では、検査604は、GPS fixがGPS受信器104または302から利用可能か否かを確認する。yesの場合、検査606は、GPSの過度に長い休止期間(アウテージ)があるか否か、または、位置変化(デルタ位置)が大きいかを尋ねる。yesの場合、動作は、GPS単独モード603に切り換える。
【0087】
しかし、そうでなければ、検査608は、推測航法パラメータのキャリブレーションが利用可能であり、確認されたか否かを尋ねる。yesの場合、複合モード602が許可される。そうでなければ、動作は、GPS単独モード603に切り換えなければならない。複合モード602にある間、2つの検査が絶えず実行される。検査610は、2基以下の衛星ビークルが利用可能か否かを確認する。真の場合、GPS解の品質は十分ではなく、動作は、推測航法単独モード601に切り換えなければならない。これは、車両110がトンネルに入るときに生じることがある。
【0088】
複合モード602において絶えず実行される他の検査は、多くの矛盾のない衛星ビークルがあるか否かを確認するような検査612である。そうであれば、GPSの結果は、非常に強く、GPS単独モード603に切り換える方が良い。GPS単独モード603にある間、検査614は、多くの矛盾のない衛星ビークルがあるか否かを確認する。そうであれば、GPSの結果は、非常に強く、動作は、GPS単独モード603を継続することができる。検査616は、2基以下の衛星ビークルが利用可能か、また、キャリブレーションが利用可能か否かを尋ねる。そうであれば、動作は、推測航法単独モード601に切り換える。
【0089】
密結合GPSおよび推測航法システム100用のハードウェアがまず起動するときに、fixモード状態機械600がステップ620で起動する。検査622は、永続的停止ビットが(例えば、不揮発性メモリに)設定されたか否かを確認する。そうであれば、ステップ624は、キャリブレーション・データが利用可能か否かを確認する。yesの場合、動作は、推測航法単独モード601で始まり、GPS受信器104または302は、車両航法解をユーザに表示させるのを遅らせずに、バックグラウンドで出てくることができるが、そうでなければ、ステップ626は、GPS fixが利用可能か否かを尋ねる。そうでなければ、ループ628を待機する。GPS fixが利用可能になった場合、動作は、GPS単独モード603に切り換える。
【0090】
屋外の状態では、エフェメリス、位置、および時間を含んだ前のデータが利用可能であり、依然として新鮮である場合には、1秒温間起動の初回測位時間(TTFF)は、GPSで可能である。しかしながら、自動車用途の車両110では、GPS信号は、駐車場内にある車両によって陰になることがあるか、または、GPS温間起動条件から開始することができない。従って、起動は、駐車場モード・ステップ630から始まる必要がある。
【0091】
車両110が屋外にあっても、エフェメリス・データが古すぎると考えられるならば、「駐車場」起動が生じるが、良い推測航法データが利用可能である限り、例えば、完全なキャリブレーション・Status-7および永続的停止ビットは、利用可能であり、推測航法単独モード601は、1秒以内に始まることができる。駐車場モード630は、最良には、1ミリ秒よりも良いGPS時間追跡するのを助ける32kHz実時間クロック(RTC)に支えられたバッテリを持たないシステムに含まれる。
【0092】
十分なキャリブレーションまたは永続的停止ビットが利用可能でない場合、駐車場モード630は、そのセッション中は利用可能ではなく、最初のfixが、新しいGPS fixが演算された後でのみ生成される。
【0093】
駐車場モードでは、推測航法は、常に前の位置から開始する。しかしながら、その判断の正確さは、最初のGPS fixが利用可能になるまで判断されることができない。
【0094】
最初のGPS fixが利用可能になると直ぐに、GPS受信器104または302がオフであったうちに車両110が移動されたことがあり得るので、現在の推測航法位置を信頼すべきか否かに関しての判断がなされなければならない。例えば、車両110がフェリーボートに載せられて輸送されるときに、新しいGPS fixからのデルタ位置および最新の推測航法の検査が行なわれる。距離が大きい場合、GPS単独のfixは、できるだけ速く正確な位置解に到達するように選択される。
【0095】
車両110が移動された距離が大きくない場合、fixは、GPS測定値および伝えられる推測航法fixの相対的な精度に依存して、GPS単独モード603または複合モード602のいずれかになる。非常に信頼できるGPSの測定値またはより低い精度の推測航法は、状態機械600をGPS単独モード603に強いる一方で、低信頼できる度のGPSデータは、より複合モード602に強いる。
【0096】
複合モード602を使用するために、キャリブレーションは、既に有効になっていなければならない。これは、工場パラメータが使用される場合には常にそうである。これは、複合モード602が得られない短い運用年数になる(例えば、キャリブレーション能力が観測されるほど十分に運転する前になる)ことを意味する。
【0097】
キャリブレーションが有効になった後の一般的なケースでは、2基以下の航行衛星が利用可能な場合、fixモードは、推測航法単独モード601である。航行衛星の数がより多く、推定したマルチパスが推定した推測航法キャリブレーションの精度よりも低い場合、fixは、GPS単独モード603になる。航行衛星の数が多くないか、または、推定したマルチパスが推定した推測航法キャリブレーションの精度よりも高い場合、fixは、複合モード602になる。
【0098】
fixモード601〜603の判断は連続的になされ、選択されたモード601〜603は毎秒変更することができる。GPSおよび推測航法条件は、複合モードまたはGPS単独モードへの移行がより良い結果を提供するか否かを判断するように常に推定される。例えば、最後のモードがGPS単独モード603である場合、増加したマルチパス環境または航行衛星の減少は、複合モード602に移行するのに十分な理由になる。
【0099】
同様に、現在のモードが複合モード602である場合、条件は、GPS単独モード603への移行がより良い結果を提供するか否かを判断するように常に推定される。現在のモードが推測航法単独モード601であり、2基を超える数の衛星が利用可能になれば、GPS単独モード603または複合モード602へのいずれかの移行が生じる。推測航法誤差の積分値が小さい短い休止期間については、移行は、複合モード602へのものになる。しかしながら、より長い休止期間については、GPS単独モード603が、バイアスされない位置推定値に素早くスナップさせるために一時的に選択される可能性が大きい。しかしながら、GPS単独モード603における僅かな数のfixだけが最良の精度を回復させるために必要である。一般には、航行衛星の数が多くなく、推定マルチパス誤差が推定キャリブレーション精度と比較して小さくない限り、fixモードは、複合モード602に戻る。
【0100】
情報の更新割合は、1Hz程度の速さであり、GPSおよび慣性航法統合システムについて記述するために使用される「超結合」特性を提供する。推測航法およびGPSの情報は、主位置/速度カルマン・フィルタ内で組み合わせられる。デルタレンジおよびデルタ針路の推測航法測定値は、GPSドップラーおよび擬似レンジ測定値と直接的に結合される。
【0101】
それは、GPSおよび慣性航法複合システム100の「密」結合手法の特性を提供し、また、GPSおよび推測航法位置ならびに速度の推定値が独立して演算され、次に、互いに助けるための情報を共有せずに位置/速度領域において互いに複合される「疎」結合の解よりも良く作用する。
【0102】
連続的なキャリブレーションは、並列のキャリブレーション方法論で複合モードにある場合に続行する。独立速度および針路推定器は、位置がGPS単独モードまたは複合モードで演算されるかとは無関係に、CANキャリブレーション・パラメータの連続的なキャリブレーション用の参照に対して使用される。
【0103】
3つの位置モード601〜603は、2つのみの代わりに使用される。基本的なDR入力データは、1回の刻み量子化(例えば、48回の刻みで17インチの車輪だと5.6cm)を有している。幾つかのセンサは、低速で刻みを出力することをスキップする。休止期間、車輪スリップ、および逃したCANbusパケットが生じる場合がある。Blunder(ポカミス)チェックおよびフィルタリングは、使用に先立って殆どの誤差を補正するために適用されることができるが、キャリブレーションに使用することはできない。
【0104】
車輪回転刻み時間の同期は、CANbus130およびホストCPUの負荷に依存して変化することがある。車輪刻み差は、バンクした道路に対してバイアスする。タイヤは、温度、速度、年数に対してサイズが変化することがある。推測航法検知および処理は、各メーカによって異なり、従って、異なる誤差特性を有している。さらに、推測航法の精度は、キャリブレーションの品質に強く依存する。1°の針路キャリブレーション誤差でさえ、所定の十分な距離の移動に対して大きい位置誤差に積分されることがある。推測航法に基づく位置は、本質的に微分係数(デルタ針路およびデルタレンジ)の積分である。従って、積分は、真のデルタ位置からの未知の積分定数または誤差を持つことになる。従って、推測航法の車輪回転刻みの積分は常にバイアスし、推測航法は、絶対的な測位能力を提供することができない。
【0105】
GPSセンサは、全く異なる利点および欠点のセットを有している。GPSキャリア位相観測は、キャリア波長の5%よりも良く測定することができる(0.05*0.19m<1cm)。それらは、キャリア位相標準偏差を1mm/秒に減少させるために、50Hzの位相固定・ループから1秒に50回の位相測定のドップラーを平均する。GPSのキャリア周波数の積分は、車輪回転刻みを積分しようとすることよりも遥かに正確である。GPSの擬似乱数的なコード位相は、絶対的な位置を提供する。コード位相波長は、293mであるが、マルチパス干渉がない場合には1mの精度で測定されることができる。市街地での脆弱性は、GPSがマルチパスおよび純粋な反射に苦しむということにある。
【0106】
推測航法センサおよびGPSセンサの利点および欠点を与えて、GPS単独モード603は、推測航法単独モード601における長い動作期間を強いるGPS信号受信の休止期間から最も速く回復するために使用される。推測航法モード601は、絶対誤差を測定することができず、位置変化だけを測定することができる。従って、推測航法データの如何なる複合も、GPS休止期間からの回復を単に遅くする。推測航法からの積分のバイアスと車輪スリップおよび量子化誤差などのCANbusデータの誤りとを複合せずにGPSの状況が好ましい場合に、GPS単独モード603は、最良の絶対精度を判断するために使用される。
【0107】
GPS単独モード603は、複数の推測航法システムに亘ってよりロバストな解を提供するために使用される。各メーカのCANバスの実施は、僅かに異なり、世界で販売される様々な種類の車両で変わる。複合モード602はGPS誤差が推測航法誤差よりも大きい場合にのみ使用されるので、GPS単独モード603の使用を最大限にすることはその差を隠してしまう。
【0108】
複合モード602は、高マルチパスまたは僅かな使用可能な航行衛星による高水平精度低下率(HDOP)が存在する状態でGPSベースの位置解を安定化させるために使用される。複合モード602は、密集した都会の峡谷に入るときに高いGPSの精度を維持するために使用される。
【0109】
GPS単独モード603に対する複合モード602の相対的な重みは、GPS解の絶対精度と推測航法精度との間でバランスする。この利点は、1秒ほどで変化することがある。
【0110】
一般に、野外の状態では、最良の航法性能は、GPS単独モード603によるものであり、GPSキャリア位相測定は、車輪センサよりも正確である。都会の状態では、マルチパスおよび反射ノイズの影響が推測航法ノイズの影響を超えるので、最良の航法性能は、複合モード602によるものである。
【0111】
車載プロセッサのないGPSチップセットおよびモジュールは、測定プラットフォーム(MP)として分類され、シリアルUART接続を通じてホストプロセッサにデータを提供する。ホストCPUは、位置および針路情報を演算する航法ソフトウェアを実行する。そのような航法ソフトウェアは、ARM、Strong ARM、Pentium(登録商標)、SHモバイル、三星などの他の一般に利用可能なマイクロプロセッサを含んだ種々多様なホスト・プラットフォームとの互換性とは独立したホスト・オペレーティング・システムである。車載プロセッサを備えたモジュールおよびチップセットは、位置、速度、および時間(PVT)解として分類され、標準的なNMEAまたは専用形式において十分な航法能力を提供する。航法ソフトウェアは、モジュールまたはチップセットに埋め込まれる。
【0112】
図7は、本発明の超密結合推測航法サブシステムの実施形態を表わし、一般的な参照数字700によってここで参照される。図7は、図1、図2(a)、図2(b)および図3に示されるアイテムのうちの幾つかの実現可能な実施の詳細をさらに示している。図2(a)および(b)は、ハードウェアまたはソフトウェア中の機能要素部分の実施について区別しており、ここでは、図7において、機能的な相互関係が表わされている。
【0113】
周回軌道上の航行衛星702は、マイクロ波信号を送信し、それは、航法測定プラットフォーム(MP)704(例えば、シリアル出力を備えたeRide社(カリフォルニア州サンフランシスコ)のOPUS-III nanoRide GPSモジュール)によって受信および復調される。MP704は、32チャネル無線周波数(RF)受信器、ベースバンド、およびSAWフィルタリング・ステージを備えている。MP704は、静止衛星型衛星航法補強システム(SBAS)を持った2チャネルのリアルタイム・ディファレンシャルGPSであることができる。これらは、ハードウェア・インタフェース706を通じて接続し、タイムレポート708、fixトリガ710、およびドップラーおよび擬似レンジ・レポート712を提供する。
【0114】
図2(b)に図示したPVT型の実施では、CANbus130データは、CANbusドライバ714およびUART716によって持ち込まれ、装置718においてタイムスタンプを押し、装置720において形式変換する。アプリケーション・プログラミング・インタフェース(API)722は、CANbusデータを入力する。代わりに、図2(a)に図示したMP型では、適切なタイムスタンプを持ったCANbus情報が、ホスト・アプリケーション724によって提供される。
【0115】
CANバッファ726は、新しい車輪刻みデータを処理し、数秒程度バッファする。ここでは、CL,CRは、100ミリ秒に亘って左右の車輪のそれぞれに対してCANbusパケットに蓄積された刻みの回数である。車輪刻み回数は、CANbusパケットの内容は蓄積された数であるので、現在のCANbusパケットと前のCANbusパケットとの差分を取ることによって生成される。このデータは、デルタレンジ(Delta-range)、デルタ針路(Delta-heading)、およびデルタ針路合計(Delta-heading-sum)の推定値を生じさせるべく、推測航法(DR)伝搬プロセッサ730によって使用される。DR伝搬プロセッサ730は、DR誤差モデル732を形成する。
【0116】
DRキャリブレーション装置734は、AL,AR,BL,およびBR用のカルマン・フィルタを備えている。AL,ARキャリブレーション・パラメータは、左右の車輪に対するdelta-heading/tick差を表わしている(例えば、分/tick=角度*60/tickの単位)。BL,BRは、左右の車輪に対するdelta-range/tickのキャリブレーション・パラメータである(例えば、mm/tickの単位)。針路オフセットは、合計デルタ針路を既知の針路基準に平行移動させるキャリブレーション・パラメータである。
【0117】
カルマン・フィルタ736は、デルタレンジおよびデルタ針路、ならびに、位置、速度、パラメータB、デルタレンジおよび針路D、および時間からの複合モード伝搬を処理する。モード選別処理738は、処理600として図6において詳述され、図3においてセレクタ314として表わされている。
【0118】
データ処理742は、NMEA航法メッセージ中でエンコードされた位置解を提供する。キャリブレーション・ステータス・メッセージ744およびNMEAメッセージは、出力API746に接続されている。図5のPVT250型の実施では、NMEA航法メッセージおよびキャリブレーション・ステータス・メッセージは、UART747によって出力される。そうでなければ、図5のMP200型の実施では、NMEA航法メッセージおよびキャリブレーション・ステータス・メッセージは、ソフトウェア・インタフェースを通じてホスト・コンピュータ・アプリケーション724に出力される。
【0119】
適用時間オフセット演算は、CANbusデータ時間との間のオフセット演算処理748で提供され、GPS受信器内部タイマが、適切な推測航法モードにさらに必要である。これは、CANbusパケット・データとCANタイマを読み出すコールバック機能とを共に受信する1ミリ秒精度のタイムスタンプを必要とする。しかしながら、オフセット・キャリブレーションは、自動的であり、最初のCANデータ・パケットの受信から進行する。この必要なキャリブレーション・ステップは、有効なキャリブレーションの後に最初のCANbusデータ・パケットで推測航法モードに入ることを防止しない。
【0120】
GPS受信器104または302、および700通信がNMEA仕様書に定義されている。リアルタイム位置情報を提供する殆どのコンピュータ・プログラムは、それらのデータがNMEA形式になるものと理解し、期待する。このデータは、GPS受信器によって演算された完全な位置、速度、および時間(PVT)の解を含んでいる。NMEAは、完全に自己完結で他の文とは無関係の「文」と呼ばれるデータのラインを送信する。各装置のカテゴリに対して標準文があり、個々の会社によって使用される専用文を定義する機能もある。標準文はすべて、その文型を使用する装置を定義する2文字の接頭文字を有している。GPS受信器では、接頭文字はGPである。接頭文字の後には、文の内容を定義する連続した3文字が続く。NMEAは、ハードウェアのメーカが文字Pから始まり、メーカを識別する3文字が続く自身専用の文を定義することを可能にする。例えば、ガーミン社の文は、PGRMで始まり、マジェラン社の文は、PMGNから始まる。
【0121】
文はそれぞれ、「$」から始まり、復帰改行シーケンスで終わり、80文字以下の可視テキスト(それに加えてライン・ターミネータ)であることができる。データは、コンマによって区切られたデータ項目を持つこの単一のライン内に含まれている。データはそれ自体、単にASCIIテキストであり、或る専門的な例において複数の文に亘って延びることが可能であるが、通常は完全に1つの可変長文に含まれている。データは、メッセージに含まれる正確さの量が変化することがある。例えば、時間が秒の小数部に示されるか、または、位置が小数点の後に3または4桁で示されることがある。データを読むプログラムは、フィールドの境界を判断するためのコンマを単に使用すべきであり、カラム位置に依存しない。各文の終わりにチェックサムに対する準備があり、それは、データを読むユニットによってチェックされることがある。チェックサム・フィールドは、1つの「*」と、すべての文字の間の8ビットの排他的論理和を表わす2つの16進数からなるが、「$」および「*」を含んでいない。チェックサムは、幾つかの文に必要である。
【0122】
上記標準には幾つかの変更があったが、GPSの使用では、遭遇する可能性のある唯一のものは、1.5および2.0〜2.3である。これらは、幾つかの異なる文の構成を単に指定するものであり、それらは、特定の装置の必要性に特有な場合がある。従って、GPSは、接続される装置に適合するように変更される必要がある場合がある。幾つかのGPSは、カスタマイズされた文のセットを構成する能力を提供し、他のGPSは、固定された選択肢のセットを提供することが可能である。多くのGPS受信器は、ユーザによって変更することができない固定された文のセットを単に出力する。現行バージョンの標準は3.01である。私はこのバージョンについて何ら具体的な情報を持っていないが、私はこのバージョンへの適合を必要とする如何なるGPSの製品も知らない。
【0123】
NMEAは、文からなり、データ・タイプと呼ばれるその第1語は、文の残りの解釈を定義している。データ・タイプはそれぞれ、それ自身の固有の解釈を持ち、NMEA標準に定義されている。$GPGGA文は、本質的なfixデータを提供する。他の文は、同一の情報のうちの幾つかを繰り返すことがあるが、新しいデータも供給する。データを読む装置またはプログラムは、それが興味を持つデータ文に注目することができるが、興味のない他の文を単に無視する。NMEA標準では、GPSが何か他のことをすべきであることを示す命令はない。代わりに、受信器はそれぞれ、すべてのデータを単に送信し、その多くが無視されると期待している。幾つかの受信器は、送るべきすべての文のサブセット、また、或る場合には個々の文を選択することができる、ユニット内の命令を有している。文が正確に読まれているか否かをユニットに示すか、または、得ていない幾つかのデータを再送する要求をするための方法はない。代わりに、受信ユニットは、チェックサムを単にチェックし、チェックサムが悪く、データが後で再び送信されるであろうと考えた場合、そのデータを無視する。
【0124】
推測航法fixは、機能APIと同様に、両方のASCII形式のNMEAストリングでGPS受信器104または302、および700によって報告される。推測航法fixは、6のfixインジケータ値によって$GPGGAストリング中にNMEA形式で示される。GPS fix値は、1である。推測航法fixは、機能APIにおける値によって報告される。推測航法は、デルタレンジを既知の観測期間で割ることによって速度推定値も提供する。これらのパラメータは両方とも、NMEA$GPRMCストリングおよびさらに機能APIにおいて目に見える。これらのフィールドは、有効なキャリブレーションが達成された後で、推測航法fixだけを報告する。
【0125】
キャリブレーション・ステータスは、ストリング中で見ることができる。推測航法デバッグ・メッセージは、推測航法キャリブレーションの進行およびステータスの詳細な監視に有用な標準的なNMEA形式で利用可能である。例えば、表VIを参照。それは、コア・ライブラリから標準的なNMEAの出力で出力されるが、そのメッセージは、求められ、次いで出力ポートまたはファイルに送られなければならない。
【表6】
【0126】
任意の保存されたキャリブレーションに関連した終了時間はない。GPS/推測航法が命令で有効とされ、CANbusパケットが利用可能になると直ぐに、新しいキャリブレーションが開始する。最後のキャリブレーションのステータス・レベルは、キャリブレーションのエポックに影響されない。
【0127】
車両110に対する物理的パラメータを知ることは、最初のキャリブレーションがAPI722を通じてキャリブレーション・アルゴリズムに入ることを可能にする。AおよびBパラメータは、左右半径(Rl,Rr)、1回転当たりの回数(CPR)およびトラック幅(TW)に応じて初期化される。推測航法モード601は、最初のGPS fixが十分な速度でなされるまで可能にならず、その結果、良好な針路オフセットを確立することができる。
【0128】
API722は、システム700を初期化し、キャリブレーションが利用可能になるときにそれを速めるための製造方法を提供し、API722および出力API746は、CANbusパケット処理726および730の機能システム検査を可能にする。
【0129】
同一のアプリケーション・スレッドが各セッションの始めに使用されるので、CANbusデータのどのソースが使用されるかを示すデータは、一般に、GPSセッション毎にホストCPUアプリケーションによって提供される。多くの場合、これは、物理的パラメータを送ることを含む。メーカによって入力される物理的パラメータは、実行中のGPS受信器104または302による動作中に推定される如何なるものほど正確にはなり得ないと想定される。
【0130】
正確なキャリブレーションは、物理的パラメータを非常に正確に知ることを必要とする。タイヤ空気圧の外見上の小さな影響でさえ、実際の車輪半径に著しく影響し、昼と夜との間で変化することがある。このような理由から、工場の物理的パラメータは、GPSのキャリブレーションしたデータの前の実行がクリアされたときにだけロードされるべきである。これは、前のGPSベースのキャリブレーションがAPIを通じて工場パラメータで上書きされないことを意味している。
【0131】
殆どの製造のケースでは、メーカが高い信頼性の推測航法を提供するために十分な精度の実際の車輪半径を知らないことが予想される。例えば、タイヤの空気圧が一杯になっていないか、または、各車輪の圧力が等しくない場合がある。
【0132】
ユーザが迅速に利用可能となることを望み、高精度のキャリブレーションを提供することができれば、GPSが利用可能になり、車両110を移動させると直ぐに、推測航法が利用可能になることができるが、メーカが合理的に正確な(数%以内での)キャリブレーションを純粋に提供することができれば、完全なGPSベースのキャリブレーションがそれ自体をインストールする前は、精度の不利益は小さい。これは、エアバッグ展開アプリケーションに対するケースであり、ここでは、推測航法の利用可能性は、当初は十分な精度よりも重要である。
【0133】
低精度の工場モードでは、物理的パラメータは、キャリブレーションの初期条件として使用され、正確なものとして内部に分類されるが、外部から観測可能なキャリブレーションの信頼性は、0にセットされる。GPSベースのキャリブレーションが初期パラメータを改善させ、通常のキャリブレーション処理を完了することができた後で、推測航法が利用可能になる。このモードは、キャリブレーションをスピードアップさせ、GPSのキャリブレーションが完了するまで推測航法を許可しないようにするときに選択される。有効な推測航法キャリブレーションまでの時間は、開始値が提供されない場合よりも速い。
【0134】
実験室検査モードは、ソフトウェアおよびシステムの機能検証を提供し、実験室検査に使用される。検査が他の工場モードにおける問題を回避すべく完了する前後に、前の実行ファイルが削除される。推測航法は、如何なる付加的なキャリブレーションなしに直ちに利用可能である。開始針路は、常に0からスタートし、開始位置を必要とする。その位置は、物理的パラメータ命令を送った後、または、GPS fixを得ることによって、位置入力APIを介してインストールされることができる。
【0135】
検査車両のキャリブレーションは、同様の車両のファミリーに転送することができ、ここでは、即時の推測航法が初期精度を有するよりも高い優先順位である。推測航法が直ちに必要であり、工場内で各車両を個々にキャリブレーションすることが可能でない場合には、単一の車両は車両のファミリーの代表として選択される。それは、工場のデフォルト・モード用に構成される。初期キャリブレーションは必要ではなく、テスト・ドライバは、GPSベースのキャリブレーションを蓄積するためにキャリブレーション・スイートを実行することができる。表VIのようなPERDCR,11 NMEAメッセージは、ストレージ・コンピュータ上で実行されるキャリブレーション中に可能になり、記録される。NMEAファイルは、ストレージ・コンピュータから取り出され、AおよびBキャリブレーション・パラメータは、最終のPERDCR,11ストリングから抽出される。物理的パラメータは、キャリブレーション・パラメータから推定される。物理的パラメータは、設置中に工場でロードされ、工場高精度キャリブレーション機能が選択される。ホストCPUアプリケーションは、ファイルから物理的パラメータを読むように構成されるか、または、それらは、ホストCPUアプリケーションにハード・コード化される。その後、車両のファミリーは、最初のGPS fixが十分な速度(例えば、時速25km以上)で得られると直ぐに、迅速な推測航法を観測することができる。
【0136】
単純な数学が、キャリブレーション・パラメータから物理的パラメータを推定するために使用される。推定キャリブレーション・パラメータは、専用のNMEAストリングPERDCR,11から容易に取り出される。PERDCR,11において観測されるキャリブレーション・パラメータは、次のような単位および大きさを有している。
AL = Rl / CPR / TW * 360 * 60 (minutes / tick);
AR = Rr / CPR / TW * 360 * 60 (minutes / tick);
BL = Rl / CPR * PI * 1000 (millimeters / tick);
BR = Rr / CPR * PI * 1000 (millimeters / tick)
PERDCR,11からの推定キャリブレーション・パラメータは、次の式によって定義される。
AL' = estimate of true AL;
AR' = estimate of true AR;
BL' = estimate of true BL;
BR' = estimate of true BR
トラック幅の物理的パラメータ(TW)は、次式によって推定される。
TWl' = BL' / AL' * (360 * 60) / (PI * 1000) (meters);
TWr' = BR' / AR' * (360 * 60) / (PI * 1000) (meters)
【0137】
キャリブレーション・アルゴリズムは、両方の車輪用のB/Aの比が同一になることを保証する。左または右の車輪のパラメータのいずれかを使用することができる。別の手法は、これら2つの推定値を平均化することであり、その結果、次式のようになる。
TW' estimate = (TWl' + TWr') / 2
不運にも、車輪半径(Rl,Rr)は、1回転当たりの回数(CPR)から分けることができない。これらのパラメータは、上記の数式におけるように常に結合される。車両メーカはそれぞれ、1セットの物理的パラメータにおけるCPRを供給する。この場合、車輪半径は、次のように推定される。
Rl = BL' * CPR / PI / 1000;
Rr = BL' * CPR / PI / 1000
【0138】
本発明のリアルタイム・キャリブレーション方法の実施形態は、3つのステップを有している:(1)デルタレンジをGPS速度と比較し、BLおよびBRパラメータを推定する;(2)Bパラメータを与えて、デルタ針路をGPS針路の変化と比較し、ALおよびARパラメータを推定する;および(3)AおよびBパラメータを与えて、GPS針路が針路オフセットを推定するために絶対参照として使用される。
【0139】
推測航法fixを演算することができようになる前に、次のものがなければならない:(a)パラメータAおよびBの有効なキャリブレーション、針路オフセット、(b)有効な位置、および(3)同期されたタイムスタンプを押したCANbusデータ・パケットの入力。
【0140】
GPS受信器104または302は、推測航法単独モード601を操作するために、GPS時間の推定値を必要としない。これは、たとえGPS受信器104または302が時間情報を提供していなくても「駐車場モード」が進行することを可能にする。図7において前の実行データ750で表わされるような有効なキャリブレーションは、不揮発性メモリデータまたはAPIを通じた入力のいずれかから提供されることができる。
【0141】
推測航法キャリブレーションは、例えば、任意のCANbusパケットが受信されると直ぐに、API命令からの初期化なしで自動的に開始する。使用可能なキャリブレーションに対する時間は、GPSデータの利用可能性、および大きい針路変化を含んだ直進および旋回の完成に依存する。キャリブレーションされる時間は、より高い速度によって減じられる。なぜならば、より多くの刻みが観測されることができ、量子化効果が比例して弱められるからである。
【0142】
Bパラメータ、車輪半径、および比のキャリブレーションは、GPS受信器104または302の直線走行のセグメントまたは直線走行のいずれかを必要とし、ここでは、8の字走行または直線走行のように針路変化が取り消される。最低要件は、そのようなセグメントを少なくとも5つ実行することである。その後、Aキャリブレーションは、トラック幅を演算し、次に旋回の実行に進む。直角旋回は、最低5個の円よりも優れている。次に、針路オフセットは、パラメータAおよびパラメータBが得られた後でキャリブレーションされることができる。
【0143】
従って、キャリブレーションを収集して生じさせるための最低要件は、針路オフセットを得るために、大きな加速なしで少なくとも70メートルの直線セグメント、少なくとも5回の直角旋回、および5秒間で少なくとも毎秒3mの短い直線セグメントである。そのような例は、34dBHzの望ましくない信号レベルを有する。
【0144】
車輪回転刻みセンサ120,122,124,および126(図1)は、一般にホール型の装置であり、それは、車輪が回転して磁気バンプが検出器を通過するときにデジタルのクロック刻みのような電気的な刻みを生じさせる。車輪の1回転に対して生じる刻みの回数は、プジョー車の48刻みからメルセデス車の98刻みのレンジである。
【0145】
センサによって生じる車輪回転刻みのの元のストリングは、連続的であるが、CANbus130は、必然的に、多重化のために車輪刻みを1-10ミリ秒毎のデータ・パケットに一纏めにしなければならない。二次処理は、これらのより短いパケットを、それぞれ100ミリ秒(例えば、10Hzの速度)に亘るより長いパケットにグループ化する。これらの10HzのCAN車輪回転刻みパケットは、安全な生命安全性ネットワークと外部アプリケーション・ネットワークとの間の保護ゲートウェイを通じて外部アプリケーションによってアクセス可能である。
【0146】
CANbus130は、車輪回転刻みのサンプリングレンジを生成するために使用されるシステム・クロックを持つプロセッサ(CPU)を有している。そのようなCPUクロックは、一般に同期用に外部では利用可能でなく、従って、10Hzのパケット生成と任意のGPS受信器のクロックとの間の時間領域を非同期に扱わなければならない。
【0147】
CANbusおよびGPS受信器のクロックを同期することができる実施形態では、キャリア・ドップラー、コード位相、および他のGPSの観測を、同一の時間レンジに亘って取ることができる。それは、マスタからスレーブに1パルス/秒(1-PPS)パルスで同期するには良い方法となる。別の実施形態は、2つのクロック領域間の相対的な時間または周波数差を観測するために、同一のクロック、または時間差もしくは周波数差の回路を使用する。eRide社(カリフォルニア州サンフランシスコ)のOPUS(商標)のベースバンド・チップは、そのような能力を有しているが、その使用は、システム・インテグレーションを劇的に複雑にする。
【0148】
CANbusデータの同期は、CANbus130およびGPS受信器104または302などのネットワーク上のパケット・メッセージの送信に固有の遅れによってさらに複雑になる。典型的には、第3のCPUは、CANbus130に物理的に接続され、CANプロトコルから専用プロトコルに変換する。なぜならば、すべてのメーカが、異なるCANメッセージ・プロトコルおよび車輪回転刻み形式を使用するからである。そのようなCPUは、GPS受信器のCAN入力に対する共通形式に変換する。遅れの発生は次の3通りである:(1)CANbus130の遅れからの発生、(2)CAN形式変換器の遅れからの発生、および(3)GPS受信器104または302に含まれた受信バッファ中の発生。これらの遅れの組合せは、「CANbusジッタ」と呼ばれ、不変部分および可変部分がある。
【0149】
CANbusジッタの組合せと、CANbusクロックとGPSのクロックと間の任意の時間のドリフトは、CANおよびGPSデータの同期および処理におけるノイズ要素を生じさせる。
【0150】
同期は、CANbusパケットが万能非同期送受信機(UART)のシリアル割り込みドライバを通じてGPS受信器のバッファに到達したときに、各CANbusパケットにタイムスタンプを押すことによって得られる。
【0151】
ホストCPUプログラムとして実行されるGPS受信器ソフトウェアは、CANbusデータをキャリブレーションおよび推測航法伝搬の両方に使用するために、どのパケットがGPS時間レンジに時間的に最も近いかを選択しなければならない。典型的な、レンジは1秒である。各々のGPSの1秒間の時間レンジ内での時間タグを持ったパケットは、通常は10個ある。
【0152】
メルセデス・システムの実験では、時間タグは急速にシフトし、たった数分で、実際には11個のパケットとなってCANbusクロックが高速に動作したことを示すか、または、9個のパケットとなってCANbusクロックが低速に動作したことを示す。さらに、CANbusジッタは、典型的には1秒間の収集動作で、9個または11個のパケットの変動を担うと見られる。
【0153】
そのような問題は、単純な解を持つ。まず、ノイズの多いパケットの開始時刻とGPSレンジ時間との間のオフセットは、殆どのジッタを除去するようにフィルタリングされる。平均差は、維持される。それは、ドリフト成分で偏らされ、従って、フィルタは、変化を追跡するように構成される。ジッタを持った元の時間タグは、GPS時間領域における開始および終了の両方の間隔を含んだパケットを選択するために使用される。次に、平均差は、GPS fix時刻を有したパケットの部分を定義するために使用される。GPS間隔内のパケットの貢献は、パケットの全個数から補間される。
【0154】
例えば、GPS開始時刻を有したパケット中で、GPS開始時刻および予定パケット時刻よりも早い部分は、平均差を引くことによって、GPS時間よりも後に生じた部分を残して補間される。同様に、GPS終了時刻の後に生じたデータを有しているパケットについては、補間は、使用された部分を想定し、平均差を使用してGPS終了時刻から予定パケット開始時刻迄である、GPS時間の後の任意の期間を除去する。これらの2つの境界パケット間の他のパケットは、それらの全体で使用される。
【0155】
そのような技術は、左右の車輪のセンサ124および126の両方からの刻みに使用され、その結果、補間された車輪回転刻み回数は、対応するGPS時間間隔と最も良く一致するように調整される。
【0156】
GPS開始時間および終了時間は、デルタレンジおよびデルタ針路の数式毎に異なる。デルタレンジ測定では、1秒以上のGPS速度が全車輪回転刻みと同一間隔で比較される。GPSキャリア・トラッキング波長が0.1904mであるので、GPS速度の1秒積分が使用され、これは、GPSベースの速度判定に共通の従来の位相固定ルック方法を使用して数度内で判断される。一方、GPS符号位相は、293mの1つのチップに相当する波長を有している。従って、符号位相からの1秒間のデルタレンジは、短時間のキャリブレーションにはノイズが多すぎる。
【0157】
GPS導出位置解を持った長時間のキャリブレーションは可能であるが、それらは甚大な処理およびメモリを必要とする。
【0158】
好ましい実施形態は、主なキャリブレーション・ソースとしてGPS速度解からの東速度および北方速度を使用する。GPSからのデルタレンジは、東方速度の2乗と北方速度の2乗との合計の平方根として定義される。針路は、北方速度で除算した東方速度の逆タンジェント(アークタンジェント)の四象限結果として定義される。東方および北方速度は、正負の符号および大きさの両方を含んでいる。
【0159】
GPSの東方および北方速度それ自体は、GPSドップラー測定値から推定される。ドップラー測定値は、測定間隔で除算したキャリア・ドップラー周波数の平均である。測定に対する適用可能な時間は、上記レンジの中心である。
【0160】
デルタレンジのキャリブレーションでは、車輪回転刻みは、GPS測定の開始および終了時刻に近似したを開始および終了時刻によって選択される。
【0161】
速度fixは、時間追跡状態機械(TSM)の測定値によって定義される1秒間のレンジの中心になされる。GPS fixの針路は、TSMレンジの中心に適用される。タイミングは、GPSからDRへの移行が時間タグのジャンプを生じさせないものとする。
【0162】
左への刻み(TL)および右への刻み(TR)が、1秒間の車輪刻みとして定義される。針路では、TLおよびTRは、前のレンジの中心から新しいレンジの中心までの時間レンジを有している。
【0163】
その係数は、次のようなものである。
AL = RadiusLeft / CPR * TRACKWIDTH * degree * 60 (minutes / tick);
BR = RadiusLeft / CPR * 1000 (millimeters / tick)
【0164】
1秒間のデルタ針路は、次のようなものである。
δh = AL * TL - AR * TR
【0165】
そして、
AL = A + dA
AR = A - dA
δh = (A + dA) TL - (A - dA) TR= A * [TL - TR] + dA * [TL + TR]
DH=0のとき、GPS測定値から判断されるように、円弧は、暫くの間、閉じているか、または、直線走行している。
【0166】
次に、
AL * TL = AR * TR
AL / AR = TR / TL
α = AL / AR = (A + dA) / (A - dA)
(1 - α) / (1 + α)を作り、次のように解くと、
(1 - α) / (1 + α) = -dA / A
従って、dA = -A (1 - α) / (1 + α)
【0167】
デルタレンジでは、車輪刻みは、TSMレンジと同一時間枠に亘る生データの刻みであると定義する。
δh = A * [TL - TR] - (1 - α) / (1 + α) * [TL + TR]
= A * [ (TL - TR) - (1 - α) / (1 + α) * (TL + TR)]
【0168】
1秒間のデルタレンジは、次のようなものである。
dr = BL * TR + BR * TR
そして、
BL = B + dB
BR = B - dB
結果として、
dR = (B + dB) * TL + (B - dB) * TR
【0169】
= B * (TL + TR) + dB * (TL - TR)
物理的パラメータにおけるBLおよびBRの定義によって、
BL / BR = AL / AR
従って、
dB = -B (1 - α) / (1 + α)
dr = B * (TL + TR) - B (1 - α) / (1 + α) * (TL - TR)
dr = B * [(TL + TR) - (1 - α) / (1 + α) * (TL - TR)]
【0170】
前のfix時刻から1秒ずつ位置を伝搬させる推測航法fixを演算するために、
deltaN = dr * cos heading (delta-north);
deltaE = dr * sin heading (delta-east);
heading h(ti) = h0 + Σdhn (n=0,i)
である。AL,AR,BL,およびBRの公証キャリブレーションを推定することを想定して、
1) αを推定するために、+Σdhn (n=0,i) GPSが0である軌道の区画を見つける。この場合、右から左への刻みの比は、次のように定義される。
a. α = TR / TL
2) Bを推定するために、GPSからdrの推定値、およびGPSレンジ変化観測レンジとしての同一観測レンジから同一の車輪刻みを得る。
B = dr / [ (TL + TR) - (1 - α) / (1 + α) * (TL - TR) ]
3) Aを推定するために、GPSからdhの推定値を得て、GPS針路変化観測レンジとしての同一観測レンジからCAN刻みを得る。
A = δh / [ (TL - TR) - (1 - α) / (1 + α) * (TL + TR) ]
4) h0を推定するために、GPS針路が信頼できる場合、合計(dh)およびGPS針路の差を維持する。
DRは、短時間では安定し、長時間では不安定である
GPSは、短時間では不安定であり、長時間では安定である
【0171】
キャリブレーションは、ポイント観測を使用して得られる。これらの観測は、0の中間値である速度情報からそれぞれ導き出されるが、積分は、静止していない。静止している最終キャリブレーションを得るために、GPS位置からの情報が必要である。
GPSからのdEおよびdNの長時間の観測では、
DEgps = ΣdEgps
DNgps = ΣdNgps
【0172】
短時間のキャリブレーションをされたDRから形成された同様の推定値では、
DEdr = ΣdEdr
DNdr = ΣdNdr
である。短時間のキャリブレーションをされたDRから形成された同様の推定値では、3ポイントの合計が例えば使用される。
DEdr = ΣdEdr
= dr1 * sin (h0 + dh1) + dr2 * sin (h0 + dh2 + dh2)
+ dr3 * sin (do + dh1 + dh2 + dh3);
DNdr = ΣdNdr
= dr1 * cos (h0 + dh1) + dr2 * cos (h0 + dh2 + dh2)
+ dr3 * cos (do + dh1 + dh2 + dh3)
【0173】
AおよびBの推定値は、十分に正確であると想定され、その結果、一次テーラー級数を使用することができる。
【0174】
本発明の実施形態は、図8においてカーブ800で表わされる速度効果現象に対する回転刻みを補償する。低速カットオフよりも下の低速セグメント801は、本質的に平坦な線である。低速カットオフと高速カットオフとの間の中間速度セグメント802は、多項式、1 + c1st (s-SL) + c2nd (s-SL)2に従う。高速セグメント303は、係数の規模限界を超えている。
【0175】
速度に関連する効果は、車輪半径の変化のために、速度に対する回転における左右の車輪刻みの回数差の変化をもたらす。換言すれば、異なる速度で得られた同一の回転は、左右の車輪の刻み回数の回数差における相違を生じさせる。その原因は、車輪ワーピングおよび車両サスペンション反応である。
【0176】
より高い速度では、車輪刻みの差として見られる、より大きな量の旋回エネルギが、より低い速度と比較して生じる。勿論、より高い速度で1秒当たりの刻みは多くなり、従って、車輪は、回転刻みから演算される明白な角速度は、速度に対して補償されなければならない。
【0177】
個々の基本デルタ針路更新に入る回転刻み(turn ticks)は、適切に補償(compensate)されなければならず、ここでは、
delta Heading = A * turn ticks
である。回転刻みは、直進するときの車輪半径の差に基づいてルーチン的に補償される。
Delta heading = Aleft * WheelTicksLeft - Aright * WheelTicksRight
= A * (WheelTicksLeft - WheelTicksRight)
- alpha * (WheelTicksLeft + WheelTicksRight)
= A * compensated turn ticks
= A * compTT
である。補償されない回転刻みは、
turnTicks = left wheel ticks - right wheel ticks
である。車輪半径に対する、セグメント801に関する低速補正(1)は、
compensated turn ticks(1)compTT(1)
= turn ticks - alpha * sum ticks;
alpha = 1-ratio / 1+ratio
であり、ここで、「比(ratio)」は、旋回しないときの左車輪刻みで除算された右車輪刻みのフィルタリングされた値である。
【0178】
速度効果CompTT(2)に対するセグメント802の補正は、次の多項式によってcompTT(1)を計る。
1 + c1st (s - SL) + c2nd (s - SL)2
これは、合計刻みの関数であり、ここでは、
s = 合計刻み(sum ticks)
SL = 基準点
低速カットオフ以下、多項式=1
高速カットオフ以上、多項式=coeffScale限界である。
【0179】
デルタ針路キャリブレーションでは、図9に表わされるように、2つの連続したGPS針路観測の差が使用される。個々の針路の時間タグは、GPS測定レンジの中心である。従って、2つのGPS針路の差は、2つのGPS針路の2つの時間タグ間の適用可能性のある時刻を有している。このような理由から、デルタ針路に使用される車輪回転刻みは、デルタレンジ用のものとは異なる時間レンジにあり、デルタレンジが、各針路をそれぞれ形成するのに使用した、より早い速度か、または、より遅い速度であるかに依存して、デルタレンジレンジから0.5秒進んでいるか、または、0.5秒遅れているかのいずれかであることができる。
【0180】
実際には、より早い(またはより遅い)speed1がデルタレンジに使用される。なぜならば、speed2の間隔を延ばすのに必要なすべてのCANbusパケットの受信に遅れが出ることがあるからであり、speed2がCAN通信線(例えば、GPSシリアル・ポートへの変換器へのCAN)上のより多くの迅速なデータを必要とするからである。
【0181】
一般には、左右の車輪回転刻み用の基本式は、各車輪を単純化したスケール因子を使用する。
DH = delta-heading = Aleft * ticks left for DH - Aright * ticks right for DH;
DR = delta-range = Bleft * ticks left for DR + Bleft * ticks right for DR
【0182】
さらに、
DR heading = initial heading from GPS + sum DH;
であるとき、
Delta East = DR sin (DR heading);
Delta North = DR cos (DR heading)
である。
【0183】
実験は、パラメータの推定が見た目ほど単純ではないことを示している。パラメータAおよびBは、全く一定ではなくなっている。それらは、時間と共に変化する。なぜならば、車輪半径が、タイヤ空気圧、外部温度、速度、旋回効果、車両荷重、乗客の配置および人数、タイヤ磨耗などと共に変化するからである。ここで記述する解は、ゆっくりと変化するパラメータとして各パラメータをモデル化するものであり、各々は、異なる時間モデルに応じたものである。
【0184】
多変数非線形系の数式におけるパラメータをすべて解くことが可能であるが、正しい順に行われた場合、実験でパラメータをそれぞれ単一変数の数式の系で独立して演算することができることが分かった。
【0185】
AおよびBに対する左右のパラメータの各々を解くのではなく、
Aright / Aleft = Bleft / Bright = r
1秒間のデルタ針路は、
δh = AL * TL - AR * TR;
【0186】
そして、
AL = A + dA;
AR = A - dA;
δh = (A + dA) TL - (A - dA) TR;
=A * [TL - TR] + dA * [TL + TR];
そして、r = AL / AR = (A + dA) / (A - dA);
【0187】
並べ替えると、
dA = -A (1 - r) / (1 + r)
である。従って、
delta-heading = A * [(TL - TR) - (1 - r) / (1 + r) * (TL + TR)]
= A * compTT
である。ここでは、補償された回転刻みエネルギは、
compTT = (TL-TR) - (1 - r) / ( 1 + r) * (TL + TR)
である。同様に、共通のBパラメータを解くと、
delta-range = B * [(TL + TR) - (1 - α) / (1 + α) * (TL - TR)]
= B * compST
である。ここで、compST=補償された合計刻みである。
【0188】
単純な公式化は、左右の車輪が同一の半径を有効に有していない一般的なケースを扱う。左右の車輪刻み間のバイアスは、車両110が直進していても蓄積する。
【0189】
このパラメータを推定する単純な方法は、車両110が直進または僅かな旋回をする運転状態を分離するために、GPS受信器104または302を使用することである。この条件の下では、比「R」は、積分開始から積分終了までのGPS針路の如何なる変化も、GPS針路の小さな変化である期間に亘って、次のように推定されることができる。
R = sum ticks right / sum ticks left
つまり、開始および終了期間は、(headGPSstart-headGPS)の絶対値が典型的には1°の閾値以下であるときに考慮される。
【0190】
デルタ針路の推定値は、如何なるGPS針路誤差、および車輪回転刻み差における正確な旋回エネルギを生じさせる車両110の針路の如何なる真の変化も含んでいる。
【0191】
これとすべての一般的な変化状態とを提供するために、個々のrの推定値は、単一状態のカルマン・フィルタでブレンドされる。各々の測定値に対する雑音モデルは、2つのGPS針路推定値の信頼性を明らかにする。カルマン・フィルタ用の処理雑音モデルは、比のパラメータがどのくらい速く変化することができるかを提供するように調整される。
【0192】
処理ノイズは、車両110が長時間停止するときは常に大きく設定される。なぜならば、車両荷重の変化が、タイヤ半径に著しく影響することがあるからである。処理ノイズを定常状態に均一化することは、比の推定値が5分毎に条件の変化を提供することを可能にする。
【0193】
都会の峡谷および/または非常に弱い信号状態で動作する場合、GPS針路推定値は、不安定で信頼性が低くなることがある。非常に大きい雑音モデルを使用しなければならない。選抜除去スキームは、正常値から遠過ぎるような、対応するカルマン・フィルタからの如何なるレンジ外の測定値も選抜除去するために使用される。
【0194】
そのような比は、車両110が直進するか、または、正味の針路変化が0に相殺される(例えば、15°の右旋回に続いて15°の左旋回)場合は、常に推定されることができる。比は、車輪半径の差を補償し、走行を真っ直ぐにする。盲目的に1.0の比を適用すると、推測航法伝搬は、直線道路を実際に走行する場合であっても、大きなカーブを持った経路を計画することができる。
【0195】
経験的には、項AおよびAleftおよびArightが車両110のサスペンションの動作の仕方によって旋回の間に現実から逸れることがあることが分かった。一般に、オーバーステアリングの印象をもたらす旋回エネルギがもっと観測される(つまり、対地追跡は、真の針路変更よりも大きいものを示す)。
【0196】
この効果を補償するために、速度補償パラメータ「C」がここでは導入され、車輪半径の任意の実際の差によって既に補償された回転刻みをさらに補償する。Cパラメータの一般形態は、値0:1である。低速では、Cパラメータは、0近傍であり、高速では、それは収束するが、1には到達しない。
【0197】
Cパラメータは、推定するのがより難しい。なぜならば、それは、車両110にとって可能な全速度レンジに亘る旋回条件についての観測を必要とするからである。従って、ベースラインまたはデフォルト・モデルが利用される。Cパラメータは、車両110の寿命に亘って別の単一状態カルマン・フィルタで頻繁に改善される。
【0198】
Cパラメータの典型的な形態は、LowSpeedCutOffと呼ばれる0の速度からベースライン値までの単位である。その後、カーブは、低下し、カーブが固定のより低い値で平坦に留まる最大速度まで直線的になる。中間領域の傾斜は、リアルタイムで推定される。速度表現を単純化するための独立変数は、左右の車輪回転刻みの合計であり、ここでは、sumTicksと呼ばれる。
【0199】
Cパラメータを推定するためのモデル化数式は、
deltaHeading = A *(1 + C * (compST - LowSpeedCutOff)) *compTT
である。Cパラメータの推定値は、次のように形成されることができる。
C estimate = (deltaHeadingGPS - A * compTT)
/ (A *compTT * (compST - LowSpeedCutOff))
Aパラメータのベースライン推定値が必要であり、Cパラメータには、単位がない。
【0200】
Aパラメータは、左右の車輪間の車輪回転刻みの変化を針路変化に変換する。次いで、針路変化は、合計推測航法針路を生成するために任意の定数で積分される。Aパラメータの演算は、デルタ針路を得ることができる少なくとも2つのGPS速度推定値を収集すること、および、同一の積分期間に対応する補償された回転刻み推定値を収集することを必要とする。従って、
【0201】
A-estimate = deltaHeadingGPS / (compTT * C)
である。ここで、A推定値(A-estimate)は、回転刻み当たりラジアンである。
【0202】
実験は、精度がGPS針路測定値の品質に依存することを示している。ソフトウェア・プログラミングは、針路を推定する少なくとも2つの方法を有するべきである。例えば、最小二乗バッチ推定器は、1つの時間間隔において得られた1セットのGPSドップラー測定値から東方および北方速度を推定し、従って、それは、動的モデルを有しないので、力学の下では遅れを持たない。別の例では、推定器は、各GPSドップラー測定値の複雑な測定誤差モデルと、GPS速度および位置がどのようにエポックからエポックへと変化するかの複雑なモデルを備えた航法カルマン・フィルタを備えている。より高い雑音比を持った弱い信号条件の下では、カルマン・フィルタは、東方および北方速度におけるより少ない変わり易さを提供する。
【0203】
もう1つの単一状態カルマン・フィルタは、A推定値の時系列を共にブレンドするために使用される。A推定値はそれぞれ、GPS針路成分における誤差モデルに基づいた測定誤差モデルを有している。タイヤ条件を変更するようにゆっくりと適応させるフィルタの時定数を設定する処理雑音モデルが含まれている。
【0204】
A推定値は、2つの他のパラメータ、車輪半径比r、および速度補償モデルCに依存する。Aパラメータは、初期の実際の動作から連続的に推定され、パラメータをそれぞれ推定することができるまで、比およびデフォルト・モデルに対して1つの値を使用する。
【0205】
パラメータBを推定する際に、デルタレンジ・パラメータBは、推測航法に対する速度を設定するために使用される。それは、左右の車輪回転刻みの合計を推測航法速度に変換する。パラメータBは、GPS速度および補償された合計刻み測定値(compST)を使用して次のように推定される。
B-estimate = GPS speed in one second / compST in one second
B推定値は、単一状態のカルマン・フィルタでブレンドされ、ここでは、測定ノイズは、GPS速度誤差の推定値の関数である。カルマン・フィルタに対する処理ノイズは、Bが時間と共にどのように変化するかの時定数を設定する。一般に、タイヤは、様々な速度および車両荷重で圧縮および膨張する。従って、含めるべき処理ノイズの量は、5分の時定数程度を有するように設定される。
【0206】
針路オフセットOパラメータについては、1セットの新しい左右の車輪回転刻みからの推測航法位置の変化を推定するために、推測航法からの絶対針路推定値を有することが必要である。このパラメータは、ここではDR_headingと呼ばれる。
DR_heading = heading offset + sum of all delta-headings
針路オフセットは、最初の信頼できるGPS針路が利用可能になった場合に、最初にセットされる(例えば、GPS受信器が、毎秒数m以上の速度で移動すると直ぐに)。初期化するには、
Heading offset = Heading from last fix
である。そして、更新するには、
DR heading on first update = heading offset + deltaHEading1
である。2回目の更新では、
DR heading = heading offset + deltaHeading1 + deltaHeading2;
= heading offset + sum of all DR deltaHeadings;
= heading offset + sumDeltaHeading
である。
【0207】
もしすべてのそのようなデルタ針路推定値の合計が完全ならば、針路オフセットは、固定した定数になり、更新される必要がない。しかし、実際には、針路オフセットは、システム雑音およびモデル化失敗によってかなり急速に変化する場合がある。針路オフセットを正確にしておくために針路オフセットを連続的に推定するためには、別の信号状態のカルマン・フィルタが必要である。
The heading offset estimate, O = GPS heading - sumDeltaHeading
そして、GPS針路誤差推定値に基づいた測定雑音モデルに応じたすべての針路オフセット推定値とブレンドされる。時定数は、約5分にセットされる。
【0208】
要約すると、キャリブレーションは、表VIIにおいて次のように進行する。
【表7】
【0209】
本発明の一実施形態は、密結合GPSと、ホスト・コンピュータ中のGPSアプリケーションとして実行するための推測航法ソフトウェア・アプリケーション・プログラムとを備えている。それは、車輪を備えた車両上のGPS測定プラットフォーム(MP)から測定値を受信するように接続される。例えば、車輪112,114,116,および118を備えた車両110(図1)上のMP704(図7)である。密結合GPSおよび推測航法ソフトウェア・アプリケーション・プログラムは、時間、fixトリガ、ドップラー、および擬似レンジ報告をGPS測定プラットフォームから収集するための入力処理を含んでいる。GPS時間からホスト・コンピュータ時間へのオフセット演算処理は、車両によって生成されるそうでなければ非同期なデータをGPS時間に揃えるために使用される。最小二乗スナップショット推定値は、位置(P)、速度(V)、車輪半径および比に対するキャリブレーション・パラメータ(B)、デルタ針路およびデルタレンジ(D)、ならびに個々の新しい位置fixおよびGPSシステム時刻に基づいた時間に対して演算される。カルマン・フィルタは、位置(P)、速度(V)、車輪半径および比に対するキャリブレーション・パラメータ(B)、デルタ針路およびデルタレンジ(D)、ならびに時間に対して含まれ、構成され、また、推測航法デルタレンジ、デルタ針路、複合モードを処理し、伝搬する。
【0210】
連続モード選別処理は、GPS解および車輪データ・キャリブレーションの利用可能性に依存して、GPS単独モード、推測航法単独モード、またはGPSおよび推測航法の両方の複合モードでの動作を選択する。新しいfix演算処理は、ハードウェア事前データを演算し、時間オフセット演算処理に接続されたGPSミリ秒タイマを調整する。バッファ・プロセッサは、車両の車輪トランスデューサによって測定される車輪回転刻みに関するタイムスタンプを押したCANbusデータを収集する。推測航法キャリブレーションのカルマン・フィルタは、左右の車輪のdelta-heading/tick差に対するALおよびARキャリブレーション・パラメータ、ならびに、左右の車輪のdelta-range/tickに対するBLおよびBRキャリブレーション・パラメータ、ならびに、合計デルタ針路を既知の針路基準に平行移動させるための針路オフセット・キャリブレーション・パラメータを処理する。推測航法データ・プロセッサは、データをバッファ・プロセッサからカルマン・フィルタによって後の処理のためのデルタレンジ、デルタ針路、およびデルタ針路合計の情報に変換するものであり、推測航法誤差モデルを備えている。アプリケーション・プログラミング・インタフェース(API)は、新しい航法fixを出力する。
【0211】
密結合GPSおよび推測航法ソフトウェア・アプリケーション・プログラムは、GPS受信器単独、DRコンピュータ単独、およびGPS受信器およびDRコンピュータの両方を含んだ複合モードを含む3つのモードのうちの1つで動作するモード選択処理をさらに含むことができる。GPS受信器単独モードにおける動作は、GPS fixが利用可能であり、十分に一貫して利用可能な衛星ビークルが存在し、2基を超える衛星ビークルが追跡されている場合に生じる。DRコンピュータ単独モードにおける動作は、GPS fixが利用可能ではない、または、2基以下の衛星ビークルが追跡されている場合に生じる。そして、複合モードにおける動作は、検査から、2基以下の衛星ビークルが追跡されている、または、十分に一貫して利用可能な衛星ビークルが存在しない、および、キャリブレーションが利用可能であり、確認される場合に生じる。新しい航法fixは、APIを通じてその後出力される。
本発明の実施例では、ポジションフィードバックを提供するために、道路マッピングを使用する。ユーザ・ナビゲーション・システムが車両で移動し、当該車両は道路上を走行してると仮定する。道路マッピングにおいて全ての道が既知であると仮定するが、新規な建造物、修理中および迂回路等により、必ずしも真ではない。通常、ロード・マッピング・データベースが一般に年に一度だけしか更新されないDVDディスクに格納される上、ユーザは2〜3年に一度しか最新版を買わないのが常である。従って、オフロードの移動を考慮すると、フィードバックには若干の適応が必要となる。
時間および位置の評価は、GPSの廃止および停止期間の間に推測航法によってアシストするフィードバックとして提供される。推定された時間および位置が有効である為には、GPS停止期間だけでなく、GPS停止期間より前に、フィードバック・プロセスが初期化されデータが一定の基準を満たさなければならない。
有効に適用される為には、フィードバックプロセスは、定期的に行わなければならない(例えば、5秒毎、あるいは毎秒)。1GPSエポックの遅延とともに位置が出力された後、フィードバックされる。次のfixが処理されるまでであれば、フィードバックはいつされても構わない。実際には、直前の出力の800ミリ秒以内である。2 GPSエポック以降になされるフィードバックは価値がなく、廃棄される。
図10Aにおいてスケジュール1000は、対応するfixの1秒以内にフィードバックがなされることを示しており、例えば fix x、fix x+1、fix x+2、fix x+3、fix x+4、fix x+5、fix x+6に対して各々、フィードバックx、フィードバックx+1、フィードバックx+2、フィードバックx+3、フィードバックx+4、フィードバックx+5等と続いている。図10Bにおいてフィードバック・スケジュール1050は、対応するfixの1〜2秒の間にフィードバックがなされることを示しており、例えば fix x、fix x+1、fix x+2、fix x+3、fix x+4、fix x+5、fix x+6に対して各々、フィードバックx-1、フィードバックx、フィードバックx+1、フィードバックx+2、フィードバックx+3、フィードバックx+4等と続いている。フィードバックメッセージのフォーマットは以下の通りであり、
PERDAPI,ETPOS,TIME,LAT,N/S,LON,E/W,HEAD,CHKS;
ここで、
PERDAPIは、PERDアプリケーション・プログラミングインタフェース;
ETPOSは、推定された時間および位置センテンスのインジケータ;
TIMEは、フィードバック時間;
LATは、フィードバック緯度;
N/Sは、北/南;
LONは、フィードバック経度;
E/Wは、東/西;
HEADは、フィードバック針路;
CHKSは、チェックサム;
を表している
11A図、11Bおよび12は、フィードバックの実施例を2つの図で示している。まず図11Aおよび11B図において、1100は情報を確認し、構造をアップデートする。ロードマッピングからの情報と共に入力されるフィードバックセンテンスは、受信時に確認される。フィードバック構造は、フィードバック情報および位置/速度/時間(つまり速度および針路を含む)を導出した、対応するGPS受信機の両方を含む。フィードバック構造(GPSおよびフィードバック情報)のデータは、DR推測航法のために同データが使えるかどうかを決定する為に分析される。
具体的には図11Aで、ロードマッピングからの情報と共に入力されるフィードバックセンテンスは、図10Aで示したようにフィードバックがfix から1秒未満に届いたかどうかを判断する為に、ステップ1102でテストされる。そうでない場合、ステップ1104は、図10Bで示したようにフィードバックがfix から2秒未満に届いたかどうかを判断する為にためにテストされる。YESの場合は、ステップ1106は、フィードバック入力データが有効なことを示すためのフラグをセットする。NOの場合は、ステップ1108は、フィードバック入力データが有効でないことを示すためのフラグをセットする。ステップ1110は、適当な待ち時間をセットして、十進数で示した分から緯度、経度および高度(LLA)を算出し、構造をフィードバック情報と関連するGPSのfix情報で満たす。最初のコアライブラリ処理は、フィードバック推定された時間および位置構造を投入し、フィードバックの信頼および有効性評価を更新するために用いられる。試作機において、これらの2つの機能は、tpSetDrEtPositionおよびpfDrEtUpdateConfと命名された。情報の結果は後段のDR推測航法で用いられる。
図11Bにおいて、フィードバックが遅れる場合、ステップ1114はフィードバック位置をずらし、ポジションフィードバックによる推定時間および位置の構造を埋める。ステップ1116は、入力データ・フラグが有効に設定されたかどうか確認する。NOの場合は、ステップ1118で、いかなる針路調整も無効にする。YESの場合は、ステップ1120で、参照およびフィードバックの針路間、今回および前回のフィードバック針路間、今回および前回の参照(GPS)針路間、そして、参照およびフィードバックの位置間の差分を算出する。フィードバックおよび参照(GPS)針路の連続的な針路誤差、同じく位置誤差およびフィードバックおよび参照の針路誤差は、回転フラグ、良好であるというフィードバック・フラグおよびエラーというフィードバック・フラグをセットするために用いる。良好であるというフィードバック・フラグを立てる為には、定性的にフィードバック・データおよびGPSデータから同様の針路誤差および安定した位置誤差でなければならない。針路誤差が同様でなかったり、あるいは位置誤差がまちまちである場合には、エラーというフィードバック・フラグをセットする。
ステップ1122は良好であるというフィードバック・フラグをテストし、真ならば、ステップ1124は信頼評価値を上げる。ステップ1126はエラーというフィードバック・フラグをテストし、真ならば、ステップ1128は信頼評価値を低下させる。良好でもエラーでもないフィードバック・フラグが立つ場合には、信頼評価値は変わらない。フラグを立てるエラーのフィードバックが真であるかをステップ1129は調べる。Noの場合には、ステップ1130は、針路調整を更新する。それ以外では、ステップ1118はいかなる針路調整を無効にする。
図12において後半の1200は、DR推測航法を表している。適切に推定された時間および位置構造が決定される。通常の場合、前回のGPS/DR fixから求まる。フィードバックがあり、品質試験にパスすると、フィードバック推定時間および位置構造が用いられる。いくつかのfixは通常のDR推測航法に続き、有効なフィードバック測位は、この位置までジャンプすることを誘発し、フィードバック構造を用いる条件に再び合うまで、通常のDR推測航法に続いて再びDR針路和に対して補正が誘発される。
DR推測航法において、どの測位構造、即ちフィードバック測位か前回のfixからの通常の測位、を使用するべきか決定がなされます。全てのGPS fixは、通常の推定時間および位置構造を使用する。DR fixだけの間、レンジは更新され、DRモードで作動しないときには、ゼロにリセットされる。
具体的には、ステップ1202は、フィードバック位置信頼評価値を加えて、前回のフィードバック使用時からのレンジを更新する。ステップ1204は、前回のフィードバック利用時から十分な距離を移動したか、ポジションフィードバックの最小限の信頼評価値があるか、フィードバック測位値が古過ぎないか、さらに、確認された針路修正があるか、をみている。そういった場合には、ステップ1206は調整済DR針路合計値の誤差を正し、ステップ1208はDR推測航法のためのフィードバック推定時間および位置構造を使用する。それ以外では、ステップ1210は、DR推測航法のための通常の推定時間および位置構造を使用する。
「回転中」とは、8度以上のフィードバック針路変化または8度以上の参照針路変化で定義される。悪いフィードバックは、フィードバックおよび参照針路が悪い針路制限値を上回り、さらに回転中である時で定義される。もしくは、フィードバックおよび参照位置が、35メートル以上で、位置不確定度(posSigma)が35メートル未満の時、もしくは、フィードバックおよび参照位置が、50メートルを超える間隔で定義される。、良好であるというフィードバックは、GPSモードである、かつ、フィードバックおよび参照位置が20メートル未満間隔で、フィードバックおよび参照針路は5度未満、で定義される。悪い針路制限は、10度さらに針路変化の12%であり、180度でキャップされる。非常に大きく回転した場合、悪いフィードバックは最高32度の値まで針路誤差を示さない限り宣言されない。最大位置信頼度は12であり、使用できるという評価閾値は6である。位置および針路は、DRの軌跡の100m毎で更新される。
【0212】
要約すると、表VIIIは、CANフレームにおける車輪刻みに対するパラメータについて記述し、表IXは、APIによって設定される速度補償パラメータを列挙している。
【表8】
【表9】
アルゴリズム
C1を推定するためのモデル式は、
dh = A * (1 + C1 * (SumT - LowSpeedCutOff)) * dT
である。並べ替えると、
C1 = (dh - A * dT) / (A * dT * (SumT - LowSpeedCutOff))
である。ここで、
TL:左車輪刻み(Left wheel ticks)
TR:右車輪刻み(Right wheel ticks)
A:デルタ針路を演算するためのパラメータ
Ratio:「Ratio = TL / TR」の数式に対して推定される左右の車輪刻みの比
SumT:車輪刻みの合計は、「SumT = TL + TR」として定義される
dT:車輪刻みの差は、「dT = (TL - TR) + (1 - Ratio) / (1 + Ratio) * SumT」として定義される。
【0213】
本発明の特定の実施形態は、記述され図示されたが、それは本発明を限定するようには意図していない。修正および変更が疑いなく当業者には明白であり、本発明が添付の特許請求の範囲によってのみ限定されることが意図されている。
【符号の説明】
【0214】
100、300 GPSおよび慣性航法複合システム
102 ディスプレイ
103、318 ロード・マップ・ディスクおよびプレーヤ
104、302 GPS受信器
106、306 アンテナ
108 DRコンピュータ
110 車両
112、114 前側の2つの操舵可能な車輪
116、118 後ろ側の2つの操舵しない車輪
120、122、124、126 アンチロック・ブレーキング・システム(ABS)トランスデューサ
128 ABSコントローラ
130 CANBus
132、134、136、138 ノード
202 アンテナ
204 航法測定プラットフォーム(MP)
206 32チャネル無線周波数(RF)受信器
208 ベースバンド
210 シリアル・インタフェース
212 ホストプロセッサ
214 ユーザアプリケーション
216 クライアント・ソフトウェア
218 機能API
222 CANBusインタフェース
224 CANBus
250 位置、速度、時間(PVT)モジュール
252 マイクロコントローラ(CPU)
254、260 UART
256 シリアル双方向インタフェース
304 GPS測位器
308 GPS衛星
310 推測航法伝搬プロセッサ
312 車輪刻み
314 モード選択器
316 複合器
328 DRキャリブレーション
【技術分野】
【0001】
本発明は、カーナビゲーションシステムに関し、特に、車両における全地球測位システム(GPS)受信器および推測航法(DR)の密結合の組合せのためのロード・マップ補正フィードバックに関する。
【背景技術】
【0002】
ストリートマップ表示を備えたGPSナビゲーションシステムは、現在、世界中の殆どの新しい車両において広く利用可能である。新しい地図の更新は、DVDディスクで購入およびインストールされ、毎年、1年単位で発行されるようである。これらの車両において使用される典型的なGPS航法受信器は、良い環境では数十メートルの正確さであるが、密集した都会環境では100メートルに低下することがある。これらのカーナビゲーションシステムは、車両が地図上の道路を走行することを想定しており、従って、地図情報を使用して最寄りの道路の正確な経路に車両位置アイコンをスナップするが、GPS受信が、トンネルおよび駐車場内で同じように失われる場合、地図表示装置スクリーン上のユーザ位置は単に更新されない。
【0003】
工場でインストールされたナビゲーションシステムは、補修部品市場の携帯型ナビゲーション装置と比較して、より高い信頼性および精度を提供することを一般には期待されている。運転手は、単にトンネルまたは駐車場に入ることに起因する長い起動時間または航法失敗を容認しないであろう。従って、従来の工場でインストールされたナビゲーションシステムは、速度計、走行記録計、ジャイロおよび加速度計などの慣性センサ、ならびに速度、前進/後進、および走行距離情報にアクセスするための車両データ・バスに接続されている。しかしながら、慣性センサは、より高いコストを強いることになる。
【0004】
従来のシステムにおいて任意の針路情報を得ることは、高価で繊細な直接結合された自動車用ジャイロスコープがインストールされていることを必要とする。SiRFテクノロジー社(カリフォルニア州サンホセ)は、この比較的高価なセンサを排除し、その代りに他の車両サブシステムから既に利用可能なセンサ・データを使用するものと彼らが言うところの解を販売している。SiRF社によれば、センサ・データ測定は、推測航法に対して意味のある情報を抽出するために十分に正確でなければならず、センサ測定には、十分な周波数が提供されなければならず、また、推測航法システムへのセンサ・データ配送における如何なる遅れも短くなければならず、例えば10ミリ秒以下の待ち時間である。
【0005】
北米およびヨーロッパにおける殆どの新しい自動車は、車速センサおよびアンチロック・ブレーキ・システム(ABS)を標準的設備としての装備している。コンパスは、ヨーロッパよりも米国でより頻繁に見られるが、安定性制御は、米国よりもヨーロッパにおいてより一般的である。そのような推測航法ソフトウェアは、特定のセンサの様々な利用可能性を考慮に入れなければならない。初期のSiRFdrive1.0は、直接結合のジャイロスコープを備えた車両プラットフォームに対して構成され、後期のSiRFdrive2.0は、分散型ABSモジュール・センサ・データを代わりに使用している。SiRFdrive2.0は、個々の車輪速度を演算してその回転速度と共に車両110の速度を判断し、その結果、高価なジャイロスコープを排除することができる。SiRFdrive2.0の推測航法システムは、プレス・リリースには、各車輪からの車輪回転の刻み(tick)(つまり、速度パルス)を収集するものとして記述されている。それは、正確な推測航法に必要なキャリブレーション値をさらに判断する。車輪刻みデータの分解能が良いほど(例えば、1回転当たりの車輪パルスの数が多いほど)、全体的な推測航法性能は良くなる。
【0006】
車輪回転刻みデータは、車両バスから直接読まれるので、車輪センサ自体に接続する必要性は見られなかった。しかしながら、生のABSデータの使用は、それほど容易ではない。最大の針路変化は、低速で道の交差点を曲がるときに通常生じるため、推測航法は低速で最も高い分解能を必要とする。ABSモジュールの主な機能は、高速時に強い制動系が適用されるときに生じる個々の車輪のロックを制御することである。従って、幾つかのABSモジュールは、それらが持つ最大の分解能での測定値を送らず、車輪センサABSモジュールは、低速時に不正確なデータを出力するか、またはデータをまったく出力しないことがある。これらの事例では、ABSソフトウェアは、通常アップグレードされ、必要な解と、推測航法アプリケーションによって必要とされる低速データ出力とを提供することができる。広告文献では、SiRFdrive2.0が高度なアルゴリズムを有し、そのようなデータ損失が低車速での精度を有した悪影響を最小限にすると言っている。
【0007】
不運にも、そのような車輪刻みによる駆動の推測航法システムは、それらの約束に応えていない。依然として必要なのは、GPSと推測航法とを組み合わせて、実際に動作する自己キャリブレーションおよび補正アルゴリズムを備えた実用的なシステムである。
【発明の開示】
【0008】
簡潔には、本発明のロード・マップ補正フィードバック補正付密結合GPSおよび推定車両航法は、一実施形態において、車両ネットワーク上の車輪速度トランスデューサのデータを収集し、車両レンジおよび針路を演算する。車両搭載のDVDに記憶されたロードマップは、道路セグメントのデータベースである。推測公報解に対して、推測航法は、GPS信号伝送がトンネル、駐車場および他の一般的な状況において失われるときに生じる航法解におけるギャップを埋める。車輪半径の連続的なキャリブレーションおよび速度効果に対する補償は、GPS fixから演算され、それは、GPS信号受信の長い休止期間(アウテージ)中の推測航法性能および精度を改善する。GPS信号が回復されるとき、本推測航法解は、周囲を探索するGPS受信器のための高品位な開始点を提供する。ロードマップフィッティング制御は、推測航法のみが長時間作動した際に蓄積されるドリフトを制御する。
【図面の簡単な説明】
【0009】
本発明の上記および更なる目的、特徴および利点は、特に添付図面と併用される場合に、その特定の実施形態の次の詳細な記述を考慮して明白となる。
【図1】車両バス・ネットワークを備えた四輪車両用の本発明の密結合GPSおよび推測航法システムの実施形態の機能ブロック図である。
【図2】図1のGPS受信器および推測航法(DR)コンピュータの組合せの2つの可能性のある実施の機能ブロック図である。
【図3】図1に示されるシステム用途のための、図2(a)および(b)におけるような、様々なハードウェアおよびソフトウェアで実施されることができる本発明のGPS、DRおよびマップマッチング複合システムの実施形態の機能ブロック図である。
【図4】図1、図2(a)および(b)のような密結合GPSおよび推測航法システムの動作のスタートアップ、運転および終了段階を示す段階図である。
【図5】図1、図2(a)および(b)のような密結合GPSおよび推測航法システムの様々なキャリブレーション状態間の移行を示すフローチャートである。
【図6】推測航法単独モード、複合モード、およびGPS単独モードにおける相互関係を制御するfixモード状態機械のフローチャートである。
【図7】図1のような車両用の密結合GPSおよび推測航法システムの機能ブロック図である。
【図8】車輪半径における速度効果を示すグラフである。
【図9】デルタ針路キャリブレーションで使用する、2つの連続したGPS針路観測の差を示すグラフである。
【図10】測位fixと、その測位fixに対応するフィードバックの関係を示すスケジュール図である。
【図11】フィードバックが有効でDR推測航法に用いられるかどうかを判別するフローチャートである。
【図12】フィードバックが有効でDR推測航法に用いられるかどうかを判別するフローチャートである。
【発明を実施するための最良の形態】
【0010】
図1は、一般的な参照数字100によってここで参照される、本発明のGPSおよび推測航法(DR)の組合せの実施形態を表わしている。GPSおよび推測航法の組合せ100は、ユーザにディスプレイ102上で航法情報を提供する。ロード・マップ・ディスクおよびプレーヤ103は、地方の道路に関して現在のユーザ位置を表示する。GPS受信器104は、アンテナ106を通じてマイクロ波衛星伝送にチューニングして追跡し、推測航法(DR)コンピュータ108によって演算されるキャリブレーションされた「デルタ針路(delta-heading)」および「デルタレンジ(delta-range)」情報に密結合される。「デルタ」の用語は、車両110の針路(つまり、方向)がどのように時間と共に変わったか、あるいは、レンジ(つまり、距離)がどのように同一の期間で変わったかを表わす。
【0011】
GPS受信器104とロード・マップ・ディスクおよびプレーヤ103は、DRコンピュータ108によって伝えられる推定値をキャリブレーションするのに有用なデータを提供する。GPS受信器104は、絶対的な位置および針路決定を提供し、それに対して、DRコンピュータ108は、推測航法解に到達するためのそのキャリブレーションしたデルタ針路およびデルタレンジの演算結果を加えることができる。ロード・マップ・ディスクおよびプレーヤ103は、推測航法解に対して道路セグメントフィードバックを提供し、長時間のGPS停止期間により、推測航法解の小さい誤差が蓄積して、道路セグメントからドリフトすることを防止します。
【0012】
DRコンピュータ108とロード・マップ・ディスクおよびプレーヤ103は、GPS受信器が著しく長い時間、fixを提供しておらず、衛星追跡をすべて失った場合に、著しくドリフトしないであろう非常に正確な推測航法解を提供する。さらに、推測航法解は、DRが比較の際に利用可能な場合に位置不確実性の大きい増加が大幅に減じられるときに信号の受信が回復される場合に、GPS受信器104を速く再稼動させるのに非常に有用である。これは、DRが車両移動を測定することができる一方で、スタンドアローンのGPS受信器は、コード探索および周波数探索の量に影響するその位置不確実性を促進する最悪のケースの移動を想定しなければならない。図2(a)および(b)は、GPS受信器104およびDRコンピュータ108を実施することができる2つの方法を示唆している。図2(a)では、軌道上の航行衛星は、マイクロ波信号を送信し、それは、アンテナ202によって受信され、航法測定プラットフォーム(MP)204(例えば、シリアル出力を備えたeRide社(カリフォルニア州サンフランシスコ)のOPUS-III nanoRide GPSモジュール)によって復調される。MP204は、航法ソフトウェアがホストプロセッサ上で実行されるタイプであり、32チャネル無線周波数(RF)受信器206、ベースバンド208、およびSAWフィリタリング・ステージを備えている。MP204は、静止衛星型衛星航法補強システム(SBAS)を備えた2チャネルのリアルタイム・ディファレンシャルGPSの機能を有している。シリアル・インタフェース210は、USB、RS-232、または同様のラインベースのインタフェースであることができる。ホストプロセッサ212は、ユーザアプリケーション214を実行するものであり、GPS、DR、およびアプリケーション・プログラミング・インタフェース(API)ライブラリを備えたクライアント・ソフトウェア216をホストする予備処理能力を有している。機能API218は、ユーザに対する表示のための航法解の通信を可能にし、CANbusインタフェース222は、CANbus224から車輪刻み情報を受け付ける。
【0013】
図2(b)において、GPS受信器104およびDRコンピュータ108は、位置、速度、時間(PVT)モジュール250で実施される。例えば、eRide社(カリフォルニア州サンフランシスコ)のePV3600を使用することができる。これは、完全なGPS/AGPS PVT受信器であり、44,000個の有効な補正器を備えたeRide社のOPUSIIIベースバンド・プロセッサを備えており、オンチップROMおよびSRAMを備えたARM7TDMI-S(登録商標)ベースのCPUと結合される。それは、下側-161dBmまでの信号を取得し、追跡することができ、従って、屋内でも動作することができる。ePV3600は、ePR3036のGPS-RFフロントエンドチップから単一の低いRF入力を取り込む(RFステージ206およびベースバンド・ステージ208と等価)。埋め込まれたマイクロコントローラ(CPU)252は、外部のパラレル・フラッシュ・メモリ、またはオンチップのROMメモリもしくはパラレル・フラッシュ・メモリから動作する。ライブラリ216における装置GPSファームウェアは、捕捉、トラッキング、ならびに、位置、速度、およびタイミングのデータ出力を扱う。UART254およびシリアル双方向インタフェース256は、「NMEA」および他のアプリケーションに接続するシリアル・インタフェース・プロトコルをサポートする。CANbus車輪刻み258は、別のUART260によって受信される。
【0014】
NMEA文は、データ・タイプと呼ばれる第1語を含んでおり、それは、文の残りがどのようにして解釈されるかを定義している。GGA文(表I)は、本質的なfixデータの例である。他の文は、幾らか同一の情報を繰り返すことがあるが、新しいデータも供給する。データを読むことができる如何なる装置も、それが興味を有しているデータ文をスクリーニングすることができる。GPSを制御するための命令はなく、それは、たとえその多くが無視されたとしても有しているデータを単にすべて送信する。傍受側は自身のチェックサムを演算し、正しくないチェックサムを持つ如何なるデータも無視する。NMEA標準は、海洋用途で使用されるすべての種類の装置に対する文を定義している。GPS受信器と関係する文はすべて、「GP」で始まる。
【0015】
所謂NMEA0183標準は、単純なASCIIのシリアル通信プロトコルを使用し、データが単一の「発信側」から多数の「傍受側」に「文」でどのように送信されるかを定義している。中間のエキスパンダにより、発信側は、殆ど無制限に多くの傍受側に送信することができ、また、マルチプレクサを使用して、複数のセンサが、単一のコンピュータ・ポートに発信することができる。サードパーティー・スイッチが利用可能であり、それは、プライマリが故障した場合に自動障害迂回によってプライマリおよびセカンダリ発信側を確立することができる。上記標準は、ホストCPUアプリケーション層における各文(メッセージ)の種類の内容を定義し、その結果、傍受側はすべて、メッセージを正確に解析することができる。
【表1】
【0016】
図1において、車両110は、2つの前側の、操舵可能な車輪112および114、ならびに2つの後ろ側の、操舵しない車輪116および118を有している。なお、所定の旋回に対して、内側の車輪の旋回半径は、外側の車輪の旋回半径よりも遥かに小さくなければならない。その理由から、演算が複雑であり、操舵角に依存するので、前側の操舵輪から針路およびレンジ情報を導き出すことは実用的ではない。
【0017】
図1における各車輪には、アンチロック・ブレーキング・システム(ABS)トランスデューサ120,122,124,および126が取り付けられている。これらのトランスデューサは、場合によっては車輪速度センサ(WSS)と呼ばれ、車輪の旋回と共に電子パルス(つまり、「刻み(tick)」)を生成する。幾つかのそのようなトランスデューサは、車輪回転を測定するために、可変磁気抵抗および光学検出器などを使用する。可変磁気抵抗WSSは、多くの場合、ホイール・ロータに取り付けられた刻み目付きの「トーン・ホイール」を使用し、可変オーディオ・トーンに似たデジタル電気出力を生成する。車輪がロックした場合、デジタル・パルスは停止し、ABSコントローラ128は、道路に対する4つのタイヤのトラクションを回復しようとするその車輪のブレーキ・キャリパへの油圧を遮断するように作用する。
【0018】
ABSセンサ情報、およびデジタル・パケット形式の多くの他の車両データは、業界標準のCANbus130によって通信される。推測航法コンピュータ108は、ノード132,134,136,および138からCANbus130上の車輪回転の刻み情報を受信する。
【0019】
コントローラ・エリア・ネットワーク(CAN)は、車両バス標準であり、マイクロコントローラおよび装置がホスト・コンピュータまたは何千もの個々のワイヤのない車両において互いに通信することを可能にする。CAN仕様書は、ロバート・ボッシュ社(ドイツ国シュツットガルト)によって1991年に発行された。www.can.bosch.com/docu/can2spec.pdfを参照
【0020】
データ・トラフィックは、単一の双ワイヤ・バス(CANbus130)上に多重化され、エンジン管理、車体制御、伝送制御、アクティブ・サスペンション、自動防護装置、環境制御およびセキュリティ情報交換を含むことができる。CANは、今ではOBD-II車両診断において標準であり、1996年以降に米国で製造されたすべての車両および軽トラックにおいて義務付けられている。欧州の車載故障診断機(EOBD)標準は同様であり、2001年以降に欧州連合で販売されたすべてのガソリン車両および2004年以降のすべてのディーゼル車に義務化されている。
【0021】
CANネットワーク中のトランスミッタは、ネットワーク中の他のすべてのノードにメッセージをブロードキャストする。各メッセージは、固有の種類識別子を有しており、その結果、メッセージは、それらに適切であるか否かをノードが識別することができる。これらの識別子は、さらにメッセージ・プライオリティ・フィールドを含んでおり、その結果、CANネットワークは、衝突するメッセージ間の優先順位を調停することができる。典型的なCANの実施は、双ワイヤ・バスを使用し、1メガビット/秒の最大データ転送速度を有している。CANbusデータ形式は、各データ・パケットに組み込まれた拡張誤差チェック能力を有している。そのプロトコルは、バス上のメッセージの衝突を自動的に扱い、その結果、より高い優先順位のメッセージが、より低い優先順位のメッセージの前に移ることを可能にする。複数のコントローラは、同一のバス上に配置されることがあり、それによって、車両110における配線量およびコネクタ数を減少させる。これは、付加的なモジュールが推測航法コンピュータ108のように従来の車両ネットワークに、より容易に付加されることも意味している。
【0022】
CANbus130がアイドル状態の場合は常に、如何なるユニットもメッセージの送信を開始することが可能である。複数のユニットがメッセージを同時に送信開始する場合、バス・アクセスの衝突は、識別子を使用してビット単位の調停によって解決される。調停メカニズムは、情報も時間も失われないことを保証する。同一の識別子を持ったデータ・フレームおよびリモート・フレームが同時に開始される場合、データ・フレームは、リモート・フレームに勝つ。調停中に、すべてのトランスミッタは、送信されたビットのレベルをバス上で監視されるレベルと比較する。これらのレベルが等しい場合、ユニットは送り続けることが可能である。「劣勢」レベルが送られ、「優勢」レベルが監視されている場合、ユニットは調停を失っており、これ以上何も送らずに取消さなければならない。CANbus130は、キャリービットへの単一チャネルを備え、そこから、データ再同期情報が導き出される。チャネルの実施は、本明細書中で指示されておらず、従って単一のワイヤに接地、2つの異なるワイヤ、光ファイバなどを加えることを可能にする。
【0023】
操舵しない左右の車輪の刻みセンサ124および126からの情報は、車両110の基本デルタレンジおよびデルタ針路を導き出すために使用される。上記車輪の回転はそれぞれ、アンチロック・ブレーキ・システム(ABS)128によって監視されるトランスデューサ・パルスの固定値を生じさせる。
【0024】
推測航法コンピュータ128によって所定周期で収集された左右の操舵しない車輪の回転刻み回数の算術平均は、車輪周長または直径が或る正確さで知られている場合に正確なデルタレンジ測定を生じさせることができる。その同一の期間に亘ってGPS受信器104から得られた距離情報は、進行中および連続的な自己キャリブレーションに使用される。
【0025】
左右の操舵しない車輪間の回転刻み回数の差は、同様に車輪周長または直径が正確に知られている場合にデルタ針路測定値に比例する。車輪116および118の周長または直径の如何なる誤差または変化も、勿論、デルタ針路およびデルタレンジの推定値における対応する誤差を生じさせる。車輪、特にそれらのタイヤは、速度、タイヤ空気圧、温度、磨耗、荷重、或る故障、およびアフターサービス操作と共に、その直径を著しく変化させることがある。
【0026】
デルタ針路およびデルタレンジの推定値における実質的な階段的な誤差が車両110の移動の際に生じる場合がある一方で、推測航法コンピュータ108またはCANbus130は、車両110がエンジンを動かさずに転がっている場合などに停止される。そのような種類の誤差は、車両110全体がトレーラまたはフェリーで輸送される場合に起こる可能性がある。
【0027】
従来のシステムは、デルタ針路およびデルタレンジの推定値における誤差を非常に良く管理もしていなければ制御もしていなかった。本発明の実施形態は、次に記述される技術によって先行技術からこれらに関して区別される。
【0028】
推測航法コンピュータ108は、デルタレンジおよびデルタ針路の測定値を自動的に積分する。それは、ローカル・レベル(北、東)座標のパケットで表現された推測航法の推定値へのスタート位置および針路から受信する。初期のデルタレンジおよびデルタ針路の条件は、GPS受信器104によってルーチン的に提供される位置および速度データから得られる。
【0029】
図3は、図1に示した用途に対して、図2(a)および2(b)におけるように実施されることができるGPS、DRおよびマップマッチング複合システム300を示している。システム300は、アンテナ306が多数の軌道上のGPS衛星308からマイクロ波信伝送を受信することができない場合に休止期間(アウテージ)および経過時間に依存したGPS測位器304を生じさせるGPS受信器302を備えている。推測航法伝搬プロセッサ310は、左側および右側の回転がそれぞれ回転する数に比例する車輪刻み312を車両の車輪から受信する。モード選択器314は、複合器316においてGPS単独、DR単独、またはGPSおよびDRの航法解の複合を出力するか否かを選択する。ロード・マップ・ディスクおよびプレーヤ318は、ユーザ位置ディスプレイ320に道路のグラフィックを提供し、道路セグメント情報を装置322に提供する。従来の実務は、GPS位置解がそこになくても、道路上の最寄りの地点に、表示されたユーザ位置を視覚的に「スナップする」ものである。
【0030】
ここで、フィードバック時間-位置(TP)構造324は、マッチした道路に最も近い適当な位置に、GPSおよびDR推測航法解合成316をスナップするための情報を提供する。GPSおよびDR推測航法解合成316をGPS解にリセットする為に、良好なGPS解を利用できる場合に、通常のTP構造326が用いられる。
【0031】
DRキャリブレーション328は、車輪半径の推定値、ならびに、回転、速度、および直線運転に亘って生じる個々の車輪半径の差に関する初期の進行中のキャリブレーションを含んでいる。推測航法伝搬プロセッサ310は、予備のGPS測位器304から反映およびキャリブレーションされる車輪刻み312からレンジおよび方位を演算するためにこれらのキャリブレーションを使用する。
【0032】
GPS測位器304において長い時間が経過すると、GPS航法受信器302は、GPS衛星308を再び取得するために広い探索を通常行なわなければならない。しかし、ここでは、DRレンジおよび針路伝搬プロセッサ310は、GPS休止期間の多くを、マッピングフィードバック324の助けを借りて位置解の演算継続に費やす。従って、これらの推定した時間および位置解は、現在のDR解の探索の初期設定を開始するための、GPS航法受信器302に対する指示330に含まれている。指示330の利点は、一般に再捕捉をスピードアップさせるためにそれを使用することができ、また、高速移動車両の用途においてより実用的な高感度探索を行なうことができるということである。
【0033】
従って、GPS受信器302は、利用可能な多数の有効な補正器(44,000個以上)を使用して並列で独立した前提を探索するように構成されている。GPS受信器302における有効な補正器のうちの幾つかは、非常に密結合な方法で推測航法解を探索し、その結果、推測航法データが正しい場合、再捕捉時間が最小限にされる。推測航法データが低い信頼性である場合、それは、代わりの前提を同時に探索することができる。後者の場合、GPS受信器302は、推測航法単独モード314の長い休止期間の後で、または、例えば、フェリーボートの長く管理されていない航路を補正するための長い電力オフ期間の後で、素早く回復するのを助けるために使用される。
【0034】
毎秒1回のfix(1Hz)の推測航法に対しては、10Hzの車輪回転刻みの観測は、GPS受信器104または302によって生じるGPS fixと同一の1秒fix間隔に同期される。そのような同期は、セレクタ314において推測航法単独、GPS単独、および複合モードの動作間で切り換える場合に、fix間の一定期間を維持する。車輪回転刻みに基づいたデルタレンジおよびデルタ針路は、1秒GPSエポック毎に測定される。絶対針路は、初期の針路基準と共にデルタ針路を積分することにより得られる。
dead-reckoning-heading = heading-offset + sum (delta-heading)
【0035】
その後、東および北の方角の如何なる変化も次の式によって判断することができる。
Delta-East = delta-range * sin (dead-reckoning heading);
Delta-North = delta-range * cos (dead-reckoning heading)
【0036】
最後に、
East position = initial east position + Sum (Delta-East);
North position = initial north position + Sum (delta-North)
である。推測航法測定およびキャリブレーション・パラメータは、次のようなものである。
delta-range = BL * CL + BR*CR;
delta-heading = AL * CL - AR*CR;
Heading = Heading-offset + sum delta-heading
【0037】
ここで、
CL,CR:1000ミリ秒などの指定期間に亘る左右の車輪のそれぞれに対してCANbusパケットに蓄積された刻み(tick)の回数。車輪回転刻みは、CANbusパケットの内容が蓄積された数であるので、現在およびそれ以前のCANbusパケットを区別することによって生成される。
BL,BR:左右の車輪のdelta-range/tickに対するキャリブレーション・パラメータ(単位:mm/tick)。
AL,AR:左右の車輪のdelta-heading/tick差に対するキャリブレーション・パラメータ(単位:分/tick=角度*60/tick)。
Heading-offset:sum delta-headingを既知の針路基準に平行移動させるキャリブレーション・パラメータ。
【0038】
従って、有効なキャリブレーションは、BL,BR(単純に「B」およびdBとして再マッピングされる)、AL,AR(つまり、単純に「A」およびdA)、および針路オフセット(heading-offset)の推定値を必要とする。GPS受信器104または302は、たとえその衛星伝送の受信が遮断されていないときであっても、それがデルタレンジ(delta-range)、デルタ針路(delta-heading)、および絶対針路の正確な測定値を提供することができるので、キャリブレーション・データの基準源としてに使用される。
【0039】
キャリブレーション・パラメータは、車両110の物理的な属性(例えば、物理的パラメータ)の既知の関係から初期化される。これらの物理的パラメータは、ここでは、左右車輪半径(Rl,Rr:Wheel Radius)、車輪の間のトラック幅距離(TW:Track Width)、およびカウント数または1回転当たりに生じる刻み(CPR)として定義される。
【0040】
車両110の回転では、旋回軌道に沿った距離は、旋回半径および角度変化の積である(例えば、ラジアンでの変更針路)。回転半径(turn radius)は、道路サイズと関係があり、未知である。
delta-range = turn radius * delta-Heading;
(単位:メートルおよびラジアン)
【0041】
生成された車輪回転刻みは、移動距離および1メートル当たりの刻み回数の積に比例する。
Count = delta-range * CPR (ticks / rotation) / [2PI wheel radius];
(単位:刻み(tick)およびメートル)
【0042】
従って、
(Count / CPR) * 2PI * wheel radius = turn radius * delta-Heading
である。
【0043】
左への旋回では、例えば、右車輪の旋回半径は、[左車輪の旋回半径+トラック幅]と等しくなる。従って、左右のデルタレンジ数式の差を取ると、旋回半径は消去され、次のものが残る。
CL / CPR * 2 * PI * Rl- CR / CPR * 2 * Rr = TW * delta-Heading
【0044】
並べ替えると、角度での針路変化(delta-heading)は、次のようになる。
delta-heading = Rl / CPR / TW * 360 * CL - Rr / CPR / TW * 360 * CR
検査すると、次のようになる。
AL = Rl / CPR / TW * 360 (degree / tick);
AR = Rr / CPR / TW * 360 (degree / tick)
【0045】
数値の正確さは、分の単位(例えば、角度(degree)*60)でパラメータを推定することによって改善される場合がある。従って、ALおよびARは、次のように演算される。
AL = Rl / CPR / TW * 360 * 60 (minutes / tick);
AR = Rr / CPR / TW * 360 * 60 (minutes / tick)
【0046】
ここでは、左右の車輪の回転刻みは、針路変化を表わし、左右の車輪の回転刻みの平均は、車両110の中心のデルタレンジを表わしている。
delta-range = R1 / CPR * PI * CL + Rr / CPR * PI * CR
【0047】
検査すると、
BL = Rl / CPR * PI (meters / tick);
BR = Rr / CPR * PI (meters / tick)
である。ミリメートルでこの係数を推定すると、数値の正確さを改善する。
【0048】
従って、BLおよびBRは、次のように演算される。
BL = Rl / CPR * PI * 1000 (millimeters / tick);
BR = Rr / CPR * PI * 1000 (millimeters / tick)
【0049】
表IIは、17インチの車輪半径、84インチのトラック幅、および1車輪回転当たり200回の刻みを持った典型的な車両110の物理的パラメータおよびそれらの対応するキャリブレーション・パラメータを示している。表II中の例は、一方の車輪(左)が他方の車輪(右)よりも僅かに大きい現実的な状況を表わしている。キャリブレーション・パラメータは、次に示す単位である。
【表2】
【0050】
キャリブレーションおよび物理的パラメータが得られた後で、付加的なパラメータ(ここでは、「針路オフセット(heading-offset)」と呼ばれる)は、実際に推測航法を開始するために必要とされる。針路オフセット・パラメータは、GPSアンテナ106の十分な運動がキャリブレーションに使用されることができるデータを生成する場合にリアルタイムで単に決定されることができる。
【0051】
GPS針路は、毎秒、atan(東速度/北方速度)としてのGPS速度ベクトルから演算され、真北が0°、真南が180°である。推測航法からのデルタ針路は、毎秒、パラメータALおよびARによって計られる車輪回転刻みの差から測定される。合計推測航法デルタ針路(dead-reckoning-delta-heading-sum)は、すべての推測航法デルタ針路(dead-reckoning delta-headings)の合計である。このパラメータのプロファイルは、真の針路の変化と一致するが、積分定数によって真の針路から逸れていく。推測航法針路は、合計推測航法デルタ針路と、針路オフセットと呼ばれる最終パラメータとの合計である。
【0052】
針路オフセットは、GPS針路と合計推測航法デルタ針路との間の任意の差である。針路オフセットは、固定値であると予想できるが、実際には、それは、CANbusデータの安定性および精度/利用可能性ならびにキャリブレーション精度に依存してドリフトする。fixセッション中またはfixセッション間の如何なる失われたCANbusパケットも、針路オフセットにおける推定不可能な誤差をもたらすことがある。個々のメーカの車輪刻みセンサの特異性は、針路オフセットの安定性にも影響することがある。
【0053】
GPS速度が0を超えるときはいつでも、GPS受信器104または302は、針路オフセットの推定値の更新を継続する。このように、システム100は、任意の異常な車輪刻み条件から素早く回復することができる。
【0054】
針路オフセットとすべての推測航法デルタ針路の合計との両方は、対として不揮発性メモリに保持されなければならず、その結果、推測航法は、電源ON直後に利用可能となる。例えば「駐車場モード」では、データ対は、GPS推測航法セッションの開始時にフェッチされる。図4を参照。これは、データ対が永続停止命令を使用してすべてのセッションの終了時に適切に保存されなければならないことを示唆している。
【0055】
「駐車場開始」は、推測航法がGPS受信器104または302の開始直後に開始されるモードであり、前のキャリブレーションは、演算されており、今度は例えば不揮発性メモリから取り出される。駐車場開始は、車両110が駐車場内で起動し、GPS受信が良好でない場合に有用である。
【0056】
駐車場開始は、特別なGPSのOFF命令を、前のシャットダウン時に実行しなければならなかったことを要求する。このOFF命令は、ここでは「永続的なシャットダウン」命令と呼ばれる。受信した場合、ビットは、駐車場開始が次のGPS-onイベントで実行されることを示す様々なキャリブレーション・パラメータで不揮発性メモリに格納される。GPS受信器104または302がセッション間に移動されていないと想定することが合理的である。そのような必須条件が満たされる場合、新しいセッションがその始めから正確であると看做すことができる。なぜならば、前の位置および針路が新しいセッションに対して有効な開始条件を提供したからである。
【0057】
針路オフセットとすべての推測航法デルタ針路のデータの合計との精度および正確さは、車両110が移動しているときに生成されるすべてのCANbusデータへの属し方に依存する。従って、車両110が駐車されて移動しなくなった後で、GPS受信器104または302は、単にOFFにされるべきである。GPS受信器104または302は、車両110が再び移動する前に、起動して実行することを可能にされるべきであり、従って、GPSは、CANbus130上の重要なCANbusデータを受信およびバッファすることを逃さない。
【0058】
CANbusデータは、短い休止期間またはギャップが認識され、補正されることができるように、リアルタイムでタイムスタンプを押されなければならない。データは、適切にタイムスタンプをデータに押さずに、GPS受信器104または302に非同期に収集され、押し込まれてはならない。GPSシステムおよびCANbus時間領域の密共有は、本発明の実施形態においては必要ではない。収集されたCANbusデータ上のタイムスタンプは、タイムスタンプのノイズを減少させるべく、また、GPSとCANbusのクロックと間の任意の時間ドリフトの影響を弱めるべく、補間および平均化される。
【0059】
幾つかの推測航法の実施形態は、10Hzの車輪回転刻みのみを受け入れることができ、従って、タイムスタンプの誤差は、50ミリ秒未満であるべきである。タイムスタンプにおける推奨変化は、10ミリ秒未満の標準偏差を有するべきである。
【0060】
GPS針路の迅速な利用可能性は、どのくらい速くまた正確にシステム100がキャリブレーションし、CAN休止期間、車輪のスリップ、または他の異常なイベントから復帰することができるかの重大な要因である。針路を最初に利用可能にすることは、他のすべてのキャリブレーション・パラメータを演算するために必要である。
【0061】
基本的な最悪のケースの針路誤差モデル(単位:度(degree))は、arctan(速度誤差/速度)として演算される。針路は、車両110が移動していない場合にはGPS受信器104または302によって判断されることができない。なぜならば、その比が任意に一周して元に戻るからである。しかしながら、速度推定値の精度に依存して、また、任意の速度誤差の大きさに依存して、低速での針路を判断することは可能である。速度誤差は、GPSキャリアのドップラー測定ノイズを水平精度低下率(HDOP)に乗じたものとしてモデル化される。
【0062】
ドップラー測定ノイズは、信号強度または信号対雑音比(SNR)に主として依存する。「都会の峡谷」における反射信号によって生じる如何なる干渉も、真の測定誤差を増大させ、速度および針路誤差をもたらす。GPS受信器104または302は、その測定値からそのような誤差を除去するために頻繁に動作している。
【0063】
4つの異なる信号条件に対する保守的な針路誤差モデルは、
44dB-Hzの望ましいモデル、
34dB-Hzの望ましくないモデル、
28dB-Hzの金属化した車室およびレンジのモデル、および
24dB-Hzの別の仕様外モデル
であり、HDOP=6と仮定した推定速度誤差は、それぞれ、0.02,0.2,1.2,および2km/hrである。
【0064】
その簡単な概要は、
針路誤差 < 44dBhz、2km/hrで1°;
針路誤差 < 34dBhz、12km/hrで1°;
針路誤差 < 28dBhz、23km/hrで3°;
針路誤差 < 24dBhz、40km/hrで3°である。
【0065】
本発明のアルゴリズムの実施形態は、これらのモデルを使用し、どの針路がキャリブレーション・パラメータに含めることができるかを判断するために針路自体の安定性を観測する。
【0066】
針路オフセットは、速度が最良の条件で20km/hr以上ある限り、5秒以内に判断されるべきである。28dB-Hzの平均SNRによって特徴づけられる金属化された車室については、パラメータは、依然としてより低いスピードでキャリブレーションするが、精度が下がる。しかしながら、連続的なフィルタリングが、針路誤差を減少させるために使用されることができる。
【0067】
「永続的停止」と呼ばれる停止命令は、ここで定義され、図6で言及される。それは、GPS受信器104または302を停止し、また、或るfixセッションから次のfixセッションへと針路キャリブレーションを保存するためにフラグとして使用され、電源OFF期間に亘ってギャップを埋める。永続的停止は、無秩序なシャットダウンを避けるために必要である。従来の実施では、通常の停止命令が出され、車両110は、次の開始命令を得る前に再び移動することができる。結果として、最後の位置および針路は、もはや有効ではない。従って、ここでは、針路オフセットは、一般的な停止命令に対して無効と宣言される。永続的なシャットダウンは、車両110が止まっており、次の「開始」命令が受信されるまで再び移動しないことを示すために、起動されるべきである。
【0068】
幾つかの従来のコード・ライブラリは、前の実行情報を持ったGPSコアを初期化する前にGPS受信器104または302にCANbusデータを送ることができない必要がある。如何なるCANbusデータも、キャリブレーションされないそのようなCANbusデータを宣言するメモリからキャリブレーションを読む前に受信される。CANbusデータは、前の実行データが読まれるまで無視される。ここでは、CANbusデータのタイミングと前の実行ファイルの受信とに制限はない。つまり、データは、キャリブレーションが受信されると直ぐに処理され、針路オフセットは、もしそれが以前に利用可能であったならば維持される。
【0069】
図4は、GPS受信器の開始および永続的停止のCANbusデータのフローおよびタイミングの関係を表わしている。動作には3段階401〜403がある。段階401では、GPS受信器104または302は、OFFであるが、CANbus130からのCANbusデータは存在する。データは、たとえそれがまだ開始していなくても、通常の方法でGPS受信器104または302に提示されることができる。ステップ410は、エンジンON命令を受信し、これは、航法が必要となることを意味している。ステップ412は、ホストCPU(図7参照)を起動し、CANbusデータの受信を開始する。ステップ414は、前の実行情報への不揮発性(NV)メモリにおけるポインタを持ったホストCPUで動作するGPSアプリケーションを提供する。ステップ416は、車両モデルおよび構成に対して一般的な初期の工場製造時のパラメータをロードする。ステップ418は、START命令によってGPSアプリケーションおよびハードウェアを起動し、不揮発性メモリに読み込む。ステップ420は、不揮発性メモリの読込みおよび書込みを表わしている。
【0070】
前の実行データは、CANフローチャートの段階401における推測航法中には保存されない。セクタの消去が、利用可能な記憶領域が消費されるときに最終的には必要となるが、そのような消去は、CANbusデータの入力に推測航法システムが遅れずについていくことを困難にする。なぜならば、消去が行なわれている間、セクタの消去は、システム指示バスを独占するからである。セッション中の前の実行の記憶は、無意味である。なぜならば、唯一の有効な記憶時間は、車両110が停止され、次のfixセッションまで再び移動しないときである。そうでなければ、次の駐車場セッションの精度を維持することは不可能である。
【0071】
段階402では、GPS受信器104または302は起動され、推測航法がステップ422で利用可能である。段階402は、ステップ424がエンジンOFF命令を受信したときに終了する。
【0072】
段階403では、GPS受信器104または302は、ステップ426における永続的なシャットダウン命令で停止される。ステップ428は、DR伝搬データを持った不揮発性メモリの更新を表わしている。CANbusデータは、依然としてGPS受信器104または302に達することがあるが、それらは無視される。
【0073】
図5は、キャリブレーション・データの様々なソースをGPS受信器104または302によって提供されるリアルタイムのキャリブレーションと継続的に混合する進行中のキャリブレーション処理500を表わしている。これは、GPSおよび推測航法の密結合をなす。リアルタイムのキャリブレーションの貢献は、Status-1、Status-3、Status-4、およびStatus-7のレベルを有しているキャリブレーション・ステータス全体の信頼レベルを増加させる。例えば、パラメータBは2を加え、パラメータAは1を加え、針路オフセットは4を加えるキャリブレーションする。最も高い信頼レベル(Status-7)は、望ましい状態であり、唯一、推測航法の結果がユーザに利用可能である。
【0074】
工場パラメータと部分的なキャリブレーションとの間で迷うことはない。工場キャリブレーションは、前の実行データが空であるかまたはクリアされたときに、前の実行データを入力する。従って、実際のキャリブレーションが初期の製造時の値に基づいた所期の推定値に追いつき始めるので、キャリブレーションのStatus-7は失われない。製造データがリアルタイム・データと混合するので、最初の完全なキャリブレーションに先立つ部分的なキャリブレーションは失われない。製造時の推定値がすべてリアルタイムのデータで上書きされるまで、この処理は継続する。
【0075】
ステップ502では、前の実行または工場パラメータがない場合、推測航法ステータス・パラメータは、「0」から、パラメータがキャリブレーションされていない初期状態に進められる。ステップ504では、ステータスは、「2」へと増加し、ここでは、デルタレンジ「B」のキャリブレーション・パラメータがキャリブレーションされ、左右の車輪の半径および比が判断される。ステップ506では、デルタ針路およびデルタレンジ「A」のキャリブレーション・パラメータ、ならびに物理的パラメータであるトラック幅(TW)がキャリブレーションされたときに、推測航法ステータス・パラメータは「3」に増加する。デルタレンジは、デルタ針路をキャリブレーションする前にキャリブレーションされなければならない。
【0076】
ステップ508では、針路オフセット、デルタ針路およびデルタレンジがキャリブレーションされるときに、推測航法ステータス・パラメータが「7」に増加する。車輪半径、比およびトラック幅がGPSデータから有効になったので、推測航法および複合モードは、ステップ510で利用可能である。
【0077】
ステップ512では、キャリブレーションが前のセッションから利用可能であり、不揮発性メモリから取り出される場合、推測航法およびキャリブレーションはその開始点から継続する。ステップ514では、前にStatus-7に達し、前のセッションが永続停止命令で終了した場合、推測航法は、ステップ510で直ちに利用可能である。キャリブレーション・パラメータがステップ518でGPSデータによって有効になった場合、複合モードは、ステップ516で利用可能である。
【0078】
代替のキャリブレーション方法は、ホストのアプリケーション・プログラミング・インタフェース(API)に依存する(図7参照。例えば、工場パラメータ・モードまたは製造時モード)。殆どのユーザは、推測航法を可及的速やかに利用可能にしておくことを好む。ステップ520では、前の実行データが空であるかまたは不在である場合、そのような工場パラメータ・モードは、車輪半径、トラック幅およびCPRに対して、近似した初期の物理的パラメータを提供する。これらの物理的パラメータは、AおよびBキャリブレーション・パラメータに変換され、それによって、キャリブレーションStatus-3を生じさせる。毎秒3m以上のGPS針路についての簡潔な観測だけが、キャリブレーションをStatus-7に上げるために必要であり、次いで、推測航法が利用可能になる。
【0079】
API工場パラメータ・モードで最も高い推測航法精度(Status-7)を期待することは非現実的である。なぜならば、車輪比およびトラック幅は、個々の車両110に対して工場で十分にキャリブレーションされることができないからである。車輪半径の比およびトラック幅は、1%の誤差よりも良いと知られていなければならない。GPS受信器104または302によって提供される経験的な測定値は、十分に良い測定値を得るための実用的な答えである。このような理由から、複合モードの動作は、フルセットのキャリブレーション・パラメータがGPSキャリブレーション・データを使用して正確に判定されるまで延期しなければならない。
【0080】
ステップ520の製造時モードで開始する典型的なシーケンスは、初期状態としてStatus-3から開始される。左右の車輪の半径およびトラック幅がキャリブレーションされる場合を想定する。製造時モードは、各車輪に対して異なる半径を指定することができない。従って、複合モードは、キャリブレーションが確認されるまで利用可能ではない。Status-7は、針路オフセットがキャリブレーションされたときに生じる。推測航法が利用可能になり、さらに、複合モードが、キャリブレーションがステップ518で確認された後にのみ利用可能である。確認は、冷間始動時のキャリブレーションと同一の条件を必要とする。
【0081】
パラメータA、パラメータB、および針路オフセットに対するキャリブレーション情報を提供するのに十分な、GPS受信器104または302を動作させるために必要な少数の最低車両駆動要件がある。これらは、表IIIに要約されている。これらは、図5におけるステップ522および524にも反映されている。
【表3】
【0082】
連続的なキャリブレーションは、車両110の寿命を最も長くする。生データが予めフィルタリングされ、各キャリブレーション・パラメータの主カルマン・フィルタ推定器で処理される前に確認される。一般に、良いキャリブレーションは、前の実行データが(例えば、不揮発性メモリに)維持される限り、永久に維持されることができる。前の実行データが完全に失われた場合、元の製造時の値は、開始点として使用されることができ、その結果、推測航法が可及的速やかに利用可能となることができる。
【0083】
キャリブレーション・ステータスをStatus-7以下に低下させる或る条件が存在する。まず、表IVにおいて要約するように、車輪回転刻み(CANbusデータ)に誤りが存在する場合がある。
【表4】
これらの種類のCAN誤りは、基本的にStatus-3にキャリブレーション・ステータスを低下させる。従って、AおよびBキャリブレーションは失われない。推測航法および複合モードは、誤りが補正され、新しい針路キャリブレーションが達成された後で直ぐに利用可能である。
【0084】
また、キャリブレーション・ステータスがキャリブレーションの誤りによって低下する可能性がある。アルゴリズムは、これらの発生をそれらが非常に稀になるまで最小限にするように構築されるべきである。高度なプレフィルタ・ロジックは、上記条件が無秩序にまたはノイズ・キャリブレーション測定で生じさせないように実施される。キャリブレーションの誤りを生じさせる最も可能性のあるイベントは、工場での正しくないキャリブレーションである(表V参照)。
【表5】
【0085】
図6は、fixモード状態機械600と、GPS資産および車輪データ・キャリブレーションの利用可能性に依存した、推測航法単独モード601、複合モード602、およびGPS単独モード603間の相互関係を示している。fixモード状態機械600は、図3におけるモード選択器314を実施するために使用されることができる。
【0086】
推測航法単独モード601では、検査604は、GPS fixがGPS受信器104または302から利用可能か否かを確認する。yesの場合、検査606は、GPSの過度に長い休止期間(アウテージ)があるか否か、または、位置変化(デルタ位置)が大きいかを尋ねる。yesの場合、動作は、GPS単独モード603に切り換える。
【0087】
しかし、そうでなければ、検査608は、推測航法パラメータのキャリブレーションが利用可能であり、確認されたか否かを尋ねる。yesの場合、複合モード602が許可される。そうでなければ、動作は、GPS単独モード603に切り換えなければならない。複合モード602にある間、2つの検査が絶えず実行される。検査610は、2基以下の衛星ビークルが利用可能か否かを確認する。真の場合、GPS解の品質は十分ではなく、動作は、推測航法単独モード601に切り換えなければならない。これは、車両110がトンネルに入るときに生じることがある。
【0088】
複合モード602において絶えず実行される他の検査は、多くの矛盾のない衛星ビークルがあるか否かを確認するような検査612である。そうであれば、GPSの結果は、非常に強く、GPS単独モード603に切り換える方が良い。GPS単独モード603にある間、検査614は、多くの矛盾のない衛星ビークルがあるか否かを確認する。そうであれば、GPSの結果は、非常に強く、動作は、GPS単独モード603を継続することができる。検査616は、2基以下の衛星ビークルが利用可能か、また、キャリブレーションが利用可能か否かを尋ねる。そうであれば、動作は、推測航法単独モード601に切り換える。
【0089】
密結合GPSおよび推測航法システム100用のハードウェアがまず起動するときに、fixモード状態機械600がステップ620で起動する。検査622は、永続的停止ビットが(例えば、不揮発性メモリに)設定されたか否かを確認する。そうであれば、ステップ624は、キャリブレーション・データが利用可能か否かを確認する。yesの場合、動作は、推測航法単独モード601で始まり、GPS受信器104または302は、車両航法解をユーザに表示させるのを遅らせずに、バックグラウンドで出てくることができるが、そうでなければ、ステップ626は、GPS fixが利用可能か否かを尋ねる。そうでなければ、ループ628を待機する。GPS fixが利用可能になった場合、動作は、GPS単独モード603に切り換える。
【0090】
屋外の状態では、エフェメリス、位置、および時間を含んだ前のデータが利用可能であり、依然として新鮮である場合には、1秒温間起動の初回測位時間(TTFF)は、GPSで可能である。しかしながら、自動車用途の車両110では、GPS信号は、駐車場内にある車両によって陰になることがあるか、または、GPS温間起動条件から開始することができない。従って、起動は、駐車場モード・ステップ630から始まる必要がある。
【0091】
車両110が屋外にあっても、エフェメリス・データが古すぎると考えられるならば、「駐車場」起動が生じるが、良い推測航法データが利用可能である限り、例えば、完全なキャリブレーション・Status-7および永続的停止ビットは、利用可能であり、推測航法単独モード601は、1秒以内に始まることができる。駐車場モード630は、最良には、1ミリ秒よりも良いGPS時間追跡するのを助ける32kHz実時間クロック(RTC)に支えられたバッテリを持たないシステムに含まれる。
【0092】
十分なキャリブレーションまたは永続的停止ビットが利用可能でない場合、駐車場モード630は、そのセッション中は利用可能ではなく、最初のfixが、新しいGPS fixが演算された後でのみ生成される。
【0093】
駐車場モードでは、推測航法は、常に前の位置から開始する。しかしながら、その判断の正確さは、最初のGPS fixが利用可能になるまで判断されることができない。
【0094】
最初のGPS fixが利用可能になると直ぐに、GPS受信器104または302がオフであったうちに車両110が移動されたことがあり得るので、現在の推測航法位置を信頼すべきか否かに関しての判断がなされなければならない。例えば、車両110がフェリーボートに載せられて輸送されるときに、新しいGPS fixからのデルタ位置および最新の推測航法の検査が行なわれる。距離が大きい場合、GPS単独のfixは、できるだけ速く正確な位置解に到達するように選択される。
【0095】
車両110が移動された距離が大きくない場合、fixは、GPS測定値および伝えられる推測航法fixの相対的な精度に依存して、GPS単独モード603または複合モード602のいずれかになる。非常に信頼できるGPSの測定値またはより低い精度の推測航法は、状態機械600をGPS単独モード603に強いる一方で、低信頼できる度のGPSデータは、より複合モード602に強いる。
【0096】
複合モード602を使用するために、キャリブレーションは、既に有効になっていなければならない。これは、工場パラメータが使用される場合には常にそうである。これは、複合モード602が得られない短い運用年数になる(例えば、キャリブレーション能力が観測されるほど十分に運転する前になる)ことを意味する。
【0097】
キャリブレーションが有効になった後の一般的なケースでは、2基以下の航行衛星が利用可能な場合、fixモードは、推測航法単独モード601である。航行衛星の数がより多く、推定したマルチパスが推定した推測航法キャリブレーションの精度よりも低い場合、fixは、GPS単独モード603になる。航行衛星の数が多くないか、または、推定したマルチパスが推定した推測航法キャリブレーションの精度よりも高い場合、fixは、複合モード602になる。
【0098】
fixモード601〜603の判断は連続的になされ、選択されたモード601〜603は毎秒変更することができる。GPSおよび推測航法条件は、複合モードまたはGPS単独モードへの移行がより良い結果を提供するか否かを判断するように常に推定される。例えば、最後のモードがGPS単独モード603である場合、増加したマルチパス環境または航行衛星の減少は、複合モード602に移行するのに十分な理由になる。
【0099】
同様に、現在のモードが複合モード602である場合、条件は、GPS単独モード603への移行がより良い結果を提供するか否かを判断するように常に推定される。現在のモードが推測航法単独モード601であり、2基を超える数の衛星が利用可能になれば、GPS単独モード603または複合モード602へのいずれかの移行が生じる。推測航法誤差の積分値が小さい短い休止期間については、移行は、複合モード602へのものになる。しかしながら、より長い休止期間については、GPS単独モード603が、バイアスされない位置推定値に素早くスナップさせるために一時的に選択される可能性が大きい。しかしながら、GPS単独モード603における僅かな数のfixだけが最良の精度を回復させるために必要である。一般には、航行衛星の数が多くなく、推定マルチパス誤差が推定キャリブレーション精度と比較して小さくない限り、fixモードは、複合モード602に戻る。
【0100】
情報の更新割合は、1Hz程度の速さであり、GPSおよび慣性航法統合システムについて記述するために使用される「超結合」特性を提供する。推測航法およびGPSの情報は、主位置/速度カルマン・フィルタ内で組み合わせられる。デルタレンジおよびデルタ針路の推測航法測定値は、GPSドップラーおよび擬似レンジ測定値と直接的に結合される。
【0101】
それは、GPSおよび慣性航法複合システム100の「密」結合手法の特性を提供し、また、GPSおよび推測航法位置ならびに速度の推定値が独立して演算され、次に、互いに助けるための情報を共有せずに位置/速度領域において互いに複合される「疎」結合の解よりも良く作用する。
【0102】
連続的なキャリブレーションは、並列のキャリブレーション方法論で複合モードにある場合に続行する。独立速度および針路推定器は、位置がGPS単独モードまたは複合モードで演算されるかとは無関係に、CANキャリブレーション・パラメータの連続的なキャリブレーション用の参照に対して使用される。
【0103】
3つの位置モード601〜603は、2つのみの代わりに使用される。基本的なDR入力データは、1回の刻み量子化(例えば、48回の刻みで17インチの車輪だと5.6cm)を有している。幾つかのセンサは、低速で刻みを出力することをスキップする。休止期間、車輪スリップ、および逃したCANbusパケットが生じる場合がある。Blunder(ポカミス)チェックおよびフィルタリングは、使用に先立って殆どの誤差を補正するために適用されることができるが、キャリブレーションに使用することはできない。
【0104】
車輪回転刻み時間の同期は、CANbus130およびホストCPUの負荷に依存して変化することがある。車輪刻み差は、バンクした道路に対してバイアスする。タイヤは、温度、速度、年数に対してサイズが変化することがある。推測航法検知および処理は、各メーカによって異なり、従って、異なる誤差特性を有している。さらに、推測航法の精度は、キャリブレーションの品質に強く依存する。1°の針路キャリブレーション誤差でさえ、所定の十分な距離の移動に対して大きい位置誤差に積分されることがある。推測航法に基づく位置は、本質的に微分係数(デルタ針路およびデルタレンジ)の積分である。従って、積分は、真のデルタ位置からの未知の積分定数または誤差を持つことになる。従って、推測航法の車輪回転刻みの積分は常にバイアスし、推測航法は、絶対的な測位能力を提供することができない。
【0105】
GPSセンサは、全く異なる利点および欠点のセットを有している。GPSキャリア位相観測は、キャリア波長の5%よりも良く測定することができる(0.05*0.19m<1cm)。それらは、キャリア位相標準偏差を1mm/秒に減少させるために、50Hzの位相固定・ループから1秒に50回の位相測定のドップラーを平均する。GPSのキャリア周波数の積分は、車輪回転刻みを積分しようとすることよりも遥かに正確である。GPSの擬似乱数的なコード位相は、絶対的な位置を提供する。コード位相波長は、293mであるが、マルチパス干渉がない場合には1mの精度で測定されることができる。市街地での脆弱性は、GPSがマルチパスおよび純粋な反射に苦しむということにある。
【0106】
推測航法センサおよびGPSセンサの利点および欠点を与えて、GPS単独モード603は、推測航法単独モード601における長い動作期間を強いるGPS信号受信の休止期間から最も速く回復するために使用される。推測航法モード601は、絶対誤差を測定することができず、位置変化だけを測定することができる。従って、推測航法データの如何なる複合も、GPS休止期間からの回復を単に遅くする。推測航法からの積分のバイアスと車輪スリップおよび量子化誤差などのCANbusデータの誤りとを複合せずにGPSの状況が好ましい場合に、GPS単独モード603は、最良の絶対精度を判断するために使用される。
【0107】
GPS単独モード603は、複数の推測航法システムに亘ってよりロバストな解を提供するために使用される。各メーカのCANバスの実施は、僅かに異なり、世界で販売される様々な種類の車両で変わる。複合モード602はGPS誤差が推測航法誤差よりも大きい場合にのみ使用されるので、GPS単独モード603の使用を最大限にすることはその差を隠してしまう。
【0108】
複合モード602は、高マルチパスまたは僅かな使用可能な航行衛星による高水平精度低下率(HDOP)が存在する状態でGPSベースの位置解を安定化させるために使用される。複合モード602は、密集した都会の峡谷に入るときに高いGPSの精度を維持するために使用される。
【0109】
GPS単独モード603に対する複合モード602の相対的な重みは、GPS解の絶対精度と推測航法精度との間でバランスする。この利点は、1秒ほどで変化することがある。
【0110】
一般に、野外の状態では、最良の航法性能は、GPS単独モード603によるものであり、GPSキャリア位相測定は、車輪センサよりも正確である。都会の状態では、マルチパスおよび反射ノイズの影響が推測航法ノイズの影響を超えるので、最良の航法性能は、複合モード602によるものである。
【0111】
車載プロセッサのないGPSチップセットおよびモジュールは、測定プラットフォーム(MP)として分類され、シリアルUART接続を通じてホストプロセッサにデータを提供する。ホストCPUは、位置および針路情報を演算する航法ソフトウェアを実行する。そのような航法ソフトウェアは、ARM、Strong ARM、Pentium(登録商標)、SHモバイル、三星などの他の一般に利用可能なマイクロプロセッサを含んだ種々多様なホスト・プラットフォームとの互換性とは独立したホスト・オペレーティング・システムである。車載プロセッサを備えたモジュールおよびチップセットは、位置、速度、および時間(PVT)解として分類され、標準的なNMEAまたは専用形式において十分な航法能力を提供する。航法ソフトウェアは、モジュールまたはチップセットに埋め込まれる。
【0112】
図7は、本発明の超密結合推測航法サブシステムの実施形態を表わし、一般的な参照数字700によってここで参照される。図7は、図1、図2(a)、図2(b)および図3に示されるアイテムのうちの幾つかの実現可能な実施の詳細をさらに示している。図2(a)および(b)は、ハードウェアまたはソフトウェア中の機能要素部分の実施について区別しており、ここでは、図7において、機能的な相互関係が表わされている。
【0113】
周回軌道上の航行衛星702は、マイクロ波信号を送信し、それは、航法測定プラットフォーム(MP)704(例えば、シリアル出力を備えたeRide社(カリフォルニア州サンフランシスコ)のOPUS-III nanoRide GPSモジュール)によって受信および復調される。MP704は、32チャネル無線周波数(RF)受信器、ベースバンド、およびSAWフィルタリング・ステージを備えている。MP704は、静止衛星型衛星航法補強システム(SBAS)を持った2チャネルのリアルタイム・ディファレンシャルGPSであることができる。これらは、ハードウェア・インタフェース706を通じて接続し、タイムレポート708、fixトリガ710、およびドップラーおよび擬似レンジ・レポート712を提供する。
【0114】
図2(b)に図示したPVT型の実施では、CANbus130データは、CANbusドライバ714およびUART716によって持ち込まれ、装置718においてタイムスタンプを押し、装置720において形式変換する。アプリケーション・プログラミング・インタフェース(API)722は、CANbusデータを入力する。代わりに、図2(a)に図示したMP型では、適切なタイムスタンプを持ったCANbus情報が、ホスト・アプリケーション724によって提供される。
【0115】
CANバッファ726は、新しい車輪刻みデータを処理し、数秒程度バッファする。ここでは、CL,CRは、100ミリ秒に亘って左右の車輪のそれぞれに対してCANbusパケットに蓄積された刻みの回数である。車輪刻み回数は、CANbusパケットの内容は蓄積された数であるので、現在のCANbusパケットと前のCANbusパケットとの差分を取ることによって生成される。このデータは、デルタレンジ(Delta-range)、デルタ針路(Delta-heading)、およびデルタ針路合計(Delta-heading-sum)の推定値を生じさせるべく、推測航法(DR)伝搬プロセッサ730によって使用される。DR伝搬プロセッサ730は、DR誤差モデル732を形成する。
【0116】
DRキャリブレーション装置734は、AL,AR,BL,およびBR用のカルマン・フィルタを備えている。AL,ARキャリブレーション・パラメータは、左右の車輪に対するdelta-heading/tick差を表わしている(例えば、分/tick=角度*60/tickの単位)。BL,BRは、左右の車輪に対するdelta-range/tickのキャリブレーション・パラメータである(例えば、mm/tickの単位)。針路オフセットは、合計デルタ針路を既知の針路基準に平行移動させるキャリブレーション・パラメータである。
【0117】
カルマン・フィルタ736は、デルタレンジおよびデルタ針路、ならびに、位置、速度、パラメータB、デルタレンジおよび針路D、および時間からの複合モード伝搬を処理する。モード選別処理738は、処理600として図6において詳述され、図3においてセレクタ314として表わされている。
【0118】
データ処理742は、NMEA航法メッセージ中でエンコードされた位置解を提供する。キャリブレーション・ステータス・メッセージ744およびNMEAメッセージは、出力API746に接続されている。図5のPVT250型の実施では、NMEA航法メッセージおよびキャリブレーション・ステータス・メッセージは、UART747によって出力される。そうでなければ、図5のMP200型の実施では、NMEA航法メッセージおよびキャリブレーション・ステータス・メッセージは、ソフトウェア・インタフェースを通じてホスト・コンピュータ・アプリケーション724に出力される。
【0119】
適用時間オフセット演算は、CANbusデータ時間との間のオフセット演算処理748で提供され、GPS受信器内部タイマが、適切な推測航法モードにさらに必要である。これは、CANbusパケット・データとCANタイマを読み出すコールバック機能とを共に受信する1ミリ秒精度のタイムスタンプを必要とする。しかしながら、オフセット・キャリブレーションは、自動的であり、最初のCANデータ・パケットの受信から進行する。この必要なキャリブレーション・ステップは、有効なキャリブレーションの後に最初のCANbusデータ・パケットで推測航法モードに入ることを防止しない。
【0120】
GPS受信器104または302、および700通信がNMEA仕様書に定義されている。リアルタイム位置情報を提供する殆どのコンピュータ・プログラムは、それらのデータがNMEA形式になるものと理解し、期待する。このデータは、GPS受信器によって演算された完全な位置、速度、および時間(PVT)の解を含んでいる。NMEAは、完全に自己完結で他の文とは無関係の「文」と呼ばれるデータのラインを送信する。各装置のカテゴリに対して標準文があり、個々の会社によって使用される専用文を定義する機能もある。標準文はすべて、その文型を使用する装置を定義する2文字の接頭文字を有している。GPS受信器では、接頭文字はGPである。接頭文字の後には、文の内容を定義する連続した3文字が続く。NMEAは、ハードウェアのメーカが文字Pから始まり、メーカを識別する3文字が続く自身専用の文を定義することを可能にする。例えば、ガーミン社の文は、PGRMで始まり、マジェラン社の文は、PMGNから始まる。
【0121】
文はそれぞれ、「$」から始まり、復帰改行シーケンスで終わり、80文字以下の可視テキスト(それに加えてライン・ターミネータ)であることができる。データは、コンマによって区切られたデータ項目を持つこの単一のライン内に含まれている。データはそれ自体、単にASCIIテキストであり、或る専門的な例において複数の文に亘って延びることが可能であるが、通常は完全に1つの可変長文に含まれている。データは、メッセージに含まれる正確さの量が変化することがある。例えば、時間が秒の小数部に示されるか、または、位置が小数点の後に3または4桁で示されることがある。データを読むプログラムは、フィールドの境界を判断するためのコンマを単に使用すべきであり、カラム位置に依存しない。各文の終わりにチェックサムに対する準備があり、それは、データを読むユニットによってチェックされることがある。チェックサム・フィールドは、1つの「*」と、すべての文字の間の8ビットの排他的論理和を表わす2つの16進数からなるが、「$」および「*」を含んでいない。チェックサムは、幾つかの文に必要である。
【0122】
上記標準には幾つかの変更があったが、GPSの使用では、遭遇する可能性のある唯一のものは、1.5および2.0〜2.3である。これらは、幾つかの異なる文の構成を単に指定するものであり、それらは、特定の装置の必要性に特有な場合がある。従って、GPSは、接続される装置に適合するように変更される必要がある場合がある。幾つかのGPSは、カスタマイズされた文のセットを構成する能力を提供し、他のGPSは、固定された選択肢のセットを提供することが可能である。多くのGPS受信器は、ユーザによって変更することができない固定された文のセットを単に出力する。現行バージョンの標準は3.01である。私はこのバージョンについて何ら具体的な情報を持っていないが、私はこのバージョンへの適合を必要とする如何なるGPSの製品も知らない。
【0123】
NMEAは、文からなり、データ・タイプと呼ばれるその第1語は、文の残りの解釈を定義している。データ・タイプはそれぞれ、それ自身の固有の解釈を持ち、NMEA標準に定義されている。$GPGGA文は、本質的なfixデータを提供する。他の文は、同一の情報のうちの幾つかを繰り返すことがあるが、新しいデータも供給する。データを読む装置またはプログラムは、それが興味を持つデータ文に注目することができるが、興味のない他の文を単に無視する。NMEA標準では、GPSが何か他のことをすべきであることを示す命令はない。代わりに、受信器はそれぞれ、すべてのデータを単に送信し、その多くが無視されると期待している。幾つかの受信器は、送るべきすべての文のサブセット、また、或る場合には個々の文を選択することができる、ユニット内の命令を有している。文が正確に読まれているか否かをユニットに示すか、または、得ていない幾つかのデータを再送する要求をするための方法はない。代わりに、受信ユニットは、チェックサムを単にチェックし、チェックサムが悪く、データが後で再び送信されるであろうと考えた場合、そのデータを無視する。
【0124】
推測航法fixは、機能APIと同様に、両方のASCII形式のNMEAストリングでGPS受信器104または302、および700によって報告される。推測航法fixは、6のfixインジケータ値によって$GPGGAストリング中にNMEA形式で示される。GPS fix値は、1である。推測航法fixは、機能APIにおける値によって報告される。推測航法は、デルタレンジを既知の観測期間で割ることによって速度推定値も提供する。これらのパラメータは両方とも、NMEA$GPRMCストリングおよびさらに機能APIにおいて目に見える。これらのフィールドは、有効なキャリブレーションが達成された後で、推測航法fixだけを報告する。
【0125】
キャリブレーション・ステータスは、ストリング中で見ることができる。推測航法デバッグ・メッセージは、推測航法キャリブレーションの進行およびステータスの詳細な監視に有用な標準的なNMEA形式で利用可能である。例えば、表VIを参照。それは、コア・ライブラリから標準的なNMEAの出力で出力されるが、そのメッセージは、求められ、次いで出力ポートまたはファイルに送られなければならない。
【表6】
【0126】
任意の保存されたキャリブレーションに関連した終了時間はない。GPS/推測航法が命令で有効とされ、CANbusパケットが利用可能になると直ぐに、新しいキャリブレーションが開始する。最後のキャリブレーションのステータス・レベルは、キャリブレーションのエポックに影響されない。
【0127】
車両110に対する物理的パラメータを知ることは、最初のキャリブレーションがAPI722を通じてキャリブレーション・アルゴリズムに入ることを可能にする。AおよびBパラメータは、左右半径(Rl,Rr)、1回転当たりの回数(CPR)およびトラック幅(TW)に応じて初期化される。推測航法モード601は、最初のGPS fixが十分な速度でなされるまで可能にならず、その結果、良好な針路オフセットを確立することができる。
【0128】
API722は、システム700を初期化し、キャリブレーションが利用可能になるときにそれを速めるための製造方法を提供し、API722および出力API746は、CANbusパケット処理726および730の機能システム検査を可能にする。
【0129】
同一のアプリケーション・スレッドが各セッションの始めに使用されるので、CANbusデータのどのソースが使用されるかを示すデータは、一般に、GPSセッション毎にホストCPUアプリケーションによって提供される。多くの場合、これは、物理的パラメータを送ることを含む。メーカによって入力される物理的パラメータは、実行中のGPS受信器104または302による動作中に推定される如何なるものほど正確にはなり得ないと想定される。
【0130】
正確なキャリブレーションは、物理的パラメータを非常に正確に知ることを必要とする。タイヤ空気圧の外見上の小さな影響でさえ、実際の車輪半径に著しく影響し、昼と夜との間で変化することがある。このような理由から、工場の物理的パラメータは、GPSのキャリブレーションしたデータの前の実行がクリアされたときにだけロードされるべきである。これは、前のGPSベースのキャリブレーションがAPIを通じて工場パラメータで上書きされないことを意味している。
【0131】
殆どの製造のケースでは、メーカが高い信頼性の推測航法を提供するために十分な精度の実際の車輪半径を知らないことが予想される。例えば、タイヤの空気圧が一杯になっていないか、または、各車輪の圧力が等しくない場合がある。
【0132】
ユーザが迅速に利用可能となることを望み、高精度のキャリブレーションを提供することができれば、GPSが利用可能になり、車両110を移動させると直ぐに、推測航法が利用可能になることができるが、メーカが合理的に正確な(数%以内での)キャリブレーションを純粋に提供することができれば、完全なGPSベースのキャリブレーションがそれ自体をインストールする前は、精度の不利益は小さい。これは、エアバッグ展開アプリケーションに対するケースであり、ここでは、推測航法の利用可能性は、当初は十分な精度よりも重要である。
【0133】
低精度の工場モードでは、物理的パラメータは、キャリブレーションの初期条件として使用され、正確なものとして内部に分類されるが、外部から観測可能なキャリブレーションの信頼性は、0にセットされる。GPSベースのキャリブレーションが初期パラメータを改善させ、通常のキャリブレーション処理を完了することができた後で、推測航法が利用可能になる。このモードは、キャリブレーションをスピードアップさせ、GPSのキャリブレーションが完了するまで推測航法を許可しないようにするときに選択される。有効な推測航法キャリブレーションまでの時間は、開始値が提供されない場合よりも速い。
【0134】
実験室検査モードは、ソフトウェアおよびシステムの機能検証を提供し、実験室検査に使用される。検査が他の工場モードにおける問題を回避すべく完了する前後に、前の実行ファイルが削除される。推測航法は、如何なる付加的なキャリブレーションなしに直ちに利用可能である。開始針路は、常に0からスタートし、開始位置を必要とする。その位置は、物理的パラメータ命令を送った後、または、GPS fixを得ることによって、位置入力APIを介してインストールされることができる。
【0135】
検査車両のキャリブレーションは、同様の車両のファミリーに転送することができ、ここでは、即時の推測航法が初期精度を有するよりも高い優先順位である。推測航法が直ちに必要であり、工場内で各車両を個々にキャリブレーションすることが可能でない場合には、単一の車両は車両のファミリーの代表として選択される。それは、工場のデフォルト・モード用に構成される。初期キャリブレーションは必要ではなく、テスト・ドライバは、GPSベースのキャリブレーションを蓄積するためにキャリブレーション・スイートを実行することができる。表VIのようなPERDCR,11 NMEAメッセージは、ストレージ・コンピュータ上で実行されるキャリブレーション中に可能になり、記録される。NMEAファイルは、ストレージ・コンピュータから取り出され、AおよびBキャリブレーション・パラメータは、最終のPERDCR,11ストリングから抽出される。物理的パラメータは、キャリブレーション・パラメータから推定される。物理的パラメータは、設置中に工場でロードされ、工場高精度キャリブレーション機能が選択される。ホストCPUアプリケーションは、ファイルから物理的パラメータを読むように構成されるか、または、それらは、ホストCPUアプリケーションにハード・コード化される。その後、車両のファミリーは、最初のGPS fixが十分な速度(例えば、時速25km以上)で得られると直ぐに、迅速な推測航法を観測することができる。
【0136】
単純な数学が、キャリブレーション・パラメータから物理的パラメータを推定するために使用される。推定キャリブレーション・パラメータは、専用のNMEAストリングPERDCR,11から容易に取り出される。PERDCR,11において観測されるキャリブレーション・パラメータは、次のような単位および大きさを有している。
AL = Rl / CPR / TW * 360 * 60 (minutes / tick);
AR = Rr / CPR / TW * 360 * 60 (minutes / tick);
BL = Rl / CPR * PI * 1000 (millimeters / tick);
BR = Rr / CPR * PI * 1000 (millimeters / tick)
PERDCR,11からの推定キャリブレーション・パラメータは、次の式によって定義される。
AL' = estimate of true AL;
AR' = estimate of true AR;
BL' = estimate of true BL;
BR' = estimate of true BR
トラック幅の物理的パラメータ(TW)は、次式によって推定される。
TWl' = BL' / AL' * (360 * 60) / (PI * 1000) (meters);
TWr' = BR' / AR' * (360 * 60) / (PI * 1000) (meters)
【0137】
キャリブレーション・アルゴリズムは、両方の車輪用のB/Aの比が同一になることを保証する。左または右の車輪のパラメータのいずれかを使用することができる。別の手法は、これら2つの推定値を平均化することであり、その結果、次式のようになる。
TW' estimate = (TWl' + TWr') / 2
不運にも、車輪半径(Rl,Rr)は、1回転当たりの回数(CPR)から分けることができない。これらのパラメータは、上記の数式におけるように常に結合される。車両メーカはそれぞれ、1セットの物理的パラメータにおけるCPRを供給する。この場合、車輪半径は、次のように推定される。
Rl = BL' * CPR / PI / 1000;
Rr = BL' * CPR / PI / 1000
【0138】
本発明のリアルタイム・キャリブレーション方法の実施形態は、3つのステップを有している:(1)デルタレンジをGPS速度と比較し、BLおよびBRパラメータを推定する;(2)Bパラメータを与えて、デルタ針路をGPS針路の変化と比較し、ALおよびARパラメータを推定する;および(3)AおよびBパラメータを与えて、GPS針路が針路オフセットを推定するために絶対参照として使用される。
【0139】
推測航法fixを演算することができようになる前に、次のものがなければならない:(a)パラメータAおよびBの有効なキャリブレーション、針路オフセット、(b)有効な位置、および(3)同期されたタイムスタンプを押したCANbusデータ・パケットの入力。
【0140】
GPS受信器104または302は、推測航法単独モード601を操作するために、GPS時間の推定値を必要としない。これは、たとえGPS受信器104または302が時間情報を提供していなくても「駐車場モード」が進行することを可能にする。図7において前の実行データ750で表わされるような有効なキャリブレーションは、不揮発性メモリデータまたはAPIを通じた入力のいずれかから提供されることができる。
【0141】
推測航法キャリブレーションは、例えば、任意のCANbusパケットが受信されると直ぐに、API命令からの初期化なしで自動的に開始する。使用可能なキャリブレーションに対する時間は、GPSデータの利用可能性、および大きい針路変化を含んだ直進および旋回の完成に依存する。キャリブレーションされる時間は、より高い速度によって減じられる。なぜならば、より多くの刻みが観測されることができ、量子化効果が比例して弱められるからである。
【0142】
Bパラメータ、車輪半径、および比のキャリブレーションは、GPS受信器104または302の直線走行のセグメントまたは直線走行のいずれかを必要とし、ここでは、8の字走行または直線走行のように針路変化が取り消される。最低要件は、そのようなセグメントを少なくとも5つ実行することである。その後、Aキャリブレーションは、トラック幅を演算し、次に旋回の実行に進む。直角旋回は、最低5個の円よりも優れている。次に、針路オフセットは、パラメータAおよびパラメータBが得られた後でキャリブレーションされることができる。
【0143】
従って、キャリブレーションを収集して生じさせるための最低要件は、針路オフセットを得るために、大きな加速なしで少なくとも70メートルの直線セグメント、少なくとも5回の直角旋回、および5秒間で少なくとも毎秒3mの短い直線セグメントである。そのような例は、34dBHzの望ましくない信号レベルを有する。
【0144】
車輪回転刻みセンサ120,122,124,および126(図1)は、一般にホール型の装置であり、それは、車輪が回転して磁気バンプが検出器を通過するときにデジタルのクロック刻みのような電気的な刻みを生じさせる。車輪の1回転に対して生じる刻みの回数は、プジョー車の48刻みからメルセデス車の98刻みのレンジである。
【0145】
センサによって生じる車輪回転刻みのの元のストリングは、連続的であるが、CANbus130は、必然的に、多重化のために車輪刻みを1-10ミリ秒毎のデータ・パケットに一纏めにしなければならない。二次処理は、これらのより短いパケットを、それぞれ100ミリ秒(例えば、10Hzの速度)に亘るより長いパケットにグループ化する。これらの10HzのCAN車輪回転刻みパケットは、安全な生命安全性ネットワークと外部アプリケーション・ネットワークとの間の保護ゲートウェイを通じて外部アプリケーションによってアクセス可能である。
【0146】
CANbus130は、車輪回転刻みのサンプリングレンジを生成するために使用されるシステム・クロックを持つプロセッサ(CPU)を有している。そのようなCPUクロックは、一般に同期用に外部では利用可能でなく、従って、10Hzのパケット生成と任意のGPS受信器のクロックとの間の時間領域を非同期に扱わなければならない。
【0147】
CANbusおよびGPS受信器のクロックを同期することができる実施形態では、キャリア・ドップラー、コード位相、および他のGPSの観測を、同一の時間レンジに亘って取ることができる。それは、マスタからスレーブに1パルス/秒(1-PPS)パルスで同期するには良い方法となる。別の実施形態は、2つのクロック領域間の相対的な時間または周波数差を観測するために、同一のクロック、または時間差もしくは周波数差の回路を使用する。eRide社(カリフォルニア州サンフランシスコ)のOPUS(商標)のベースバンド・チップは、そのような能力を有しているが、その使用は、システム・インテグレーションを劇的に複雑にする。
【0148】
CANbusデータの同期は、CANbus130およびGPS受信器104または302などのネットワーク上のパケット・メッセージの送信に固有の遅れによってさらに複雑になる。典型的には、第3のCPUは、CANbus130に物理的に接続され、CANプロトコルから専用プロトコルに変換する。なぜならば、すべてのメーカが、異なるCANメッセージ・プロトコルおよび車輪回転刻み形式を使用するからである。そのようなCPUは、GPS受信器のCAN入力に対する共通形式に変換する。遅れの発生は次の3通りである:(1)CANbus130の遅れからの発生、(2)CAN形式変換器の遅れからの発生、および(3)GPS受信器104または302に含まれた受信バッファ中の発生。これらの遅れの組合せは、「CANbusジッタ」と呼ばれ、不変部分および可変部分がある。
【0149】
CANbusジッタの組合せと、CANbusクロックとGPSのクロックと間の任意の時間のドリフトは、CANおよびGPSデータの同期および処理におけるノイズ要素を生じさせる。
【0150】
同期は、CANbusパケットが万能非同期送受信機(UART)のシリアル割り込みドライバを通じてGPS受信器のバッファに到達したときに、各CANbusパケットにタイムスタンプを押すことによって得られる。
【0151】
ホストCPUプログラムとして実行されるGPS受信器ソフトウェアは、CANbusデータをキャリブレーションおよび推測航法伝搬の両方に使用するために、どのパケットがGPS時間レンジに時間的に最も近いかを選択しなければならない。典型的な、レンジは1秒である。各々のGPSの1秒間の時間レンジ内での時間タグを持ったパケットは、通常は10個ある。
【0152】
メルセデス・システムの実験では、時間タグは急速にシフトし、たった数分で、実際には11個のパケットとなってCANbusクロックが高速に動作したことを示すか、または、9個のパケットとなってCANbusクロックが低速に動作したことを示す。さらに、CANbusジッタは、典型的には1秒間の収集動作で、9個または11個のパケットの変動を担うと見られる。
【0153】
そのような問題は、単純な解を持つ。まず、ノイズの多いパケットの開始時刻とGPSレンジ時間との間のオフセットは、殆どのジッタを除去するようにフィルタリングされる。平均差は、維持される。それは、ドリフト成分で偏らされ、従って、フィルタは、変化を追跡するように構成される。ジッタを持った元の時間タグは、GPS時間領域における開始および終了の両方の間隔を含んだパケットを選択するために使用される。次に、平均差は、GPS fix時刻を有したパケットの部分を定義するために使用される。GPS間隔内のパケットの貢献は、パケットの全個数から補間される。
【0154】
例えば、GPS開始時刻を有したパケット中で、GPS開始時刻および予定パケット時刻よりも早い部分は、平均差を引くことによって、GPS時間よりも後に生じた部分を残して補間される。同様に、GPS終了時刻の後に生じたデータを有しているパケットについては、補間は、使用された部分を想定し、平均差を使用してGPS終了時刻から予定パケット開始時刻迄である、GPS時間の後の任意の期間を除去する。これらの2つの境界パケット間の他のパケットは、それらの全体で使用される。
【0155】
そのような技術は、左右の車輪のセンサ124および126の両方からの刻みに使用され、その結果、補間された車輪回転刻み回数は、対応するGPS時間間隔と最も良く一致するように調整される。
【0156】
GPS開始時間および終了時間は、デルタレンジおよびデルタ針路の数式毎に異なる。デルタレンジ測定では、1秒以上のGPS速度が全車輪回転刻みと同一間隔で比較される。GPSキャリア・トラッキング波長が0.1904mであるので、GPS速度の1秒積分が使用され、これは、GPSベースの速度判定に共通の従来の位相固定ルック方法を使用して数度内で判断される。一方、GPS符号位相は、293mの1つのチップに相当する波長を有している。従って、符号位相からの1秒間のデルタレンジは、短時間のキャリブレーションにはノイズが多すぎる。
【0157】
GPS導出位置解を持った長時間のキャリブレーションは可能であるが、それらは甚大な処理およびメモリを必要とする。
【0158】
好ましい実施形態は、主なキャリブレーション・ソースとしてGPS速度解からの東速度および北方速度を使用する。GPSからのデルタレンジは、東方速度の2乗と北方速度の2乗との合計の平方根として定義される。針路は、北方速度で除算した東方速度の逆タンジェント(アークタンジェント)の四象限結果として定義される。東方および北方速度は、正負の符号および大きさの両方を含んでいる。
【0159】
GPSの東方および北方速度それ自体は、GPSドップラー測定値から推定される。ドップラー測定値は、測定間隔で除算したキャリア・ドップラー周波数の平均である。測定に対する適用可能な時間は、上記レンジの中心である。
【0160】
デルタレンジのキャリブレーションでは、車輪回転刻みは、GPS測定の開始および終了時刻に近似したを開始および終了時刻によって選択される。
【0161】
速度fixは、時間追跡状態機械(TSM)の測定値によって定義される1秒間のレンジの中心になされる。GPS fixの針路は、TSMレンジの中心に適用される。タイミングは、GPSからDRへの移行が時間タグのジャンプを生じさせないものとする。
【0162】
左への刻み(TL)および右への刻み(TR)が、1秒間の車輪刻みとして定義される。針路では、TLおよびTRは、前のレンジの中心から新しいレンジの中心までの時間レンジを有している。
【0163】
その係数は、次のようなものである。
AL = RadiusLeft / CPR * TRACKWIDTH * degree * 60 (minutes / tick);
BR = RadiusLeft / CPR * 1000 (millimeters / tick)
【0164】
1秒間のデルタ針路は、次のようなものである。
δh = AL * TL - AR * TR
【0165】
そして、
AL = A + dA
AR = A - dA
δh = (A + dA) TL - (A - dA) TR= A * [TL - TR] + dA * [TL + TR]
DH=0のとき、GPS測定値から判断されるように、円弧は、暫くの間、閉じているか、または、直線走行している。
【0166】
次に、
AL * TL = AR * TR
AL / AR = TR / TL
α = AL / AR = (A + dA) / (A - dA)
(1 - α) / (1 + α)を作り、次のように解くと、
(1 - α) / (1 + α) = -dA / A
従って、dA = -A (1 - α) / (1 + α)
【0167】
デルタレンジでは、車輪刻みは、TSMレンジと同一時間枠に亘る生データの刻みであると定義する。
δh = A * [TL - TR] - (1 - α) / (1 + α) * [TL + TR]
= A * [ (TL - TR) - (1 - α) / (1 + α) * (TL + TR)]
【0168】
1秒間のデルタレンジは、次のようなものである。
dr = BL * TR + BR * TR
そして、
BL = B + dB
BR = B - dB
結果として、
dR = (B + dB) * TL + (B - dB) * TR
【0169】
= B * (TL + TR) + dB * (TL - TR)
物理的パラメータにおけるBLおよびBRの定義によって、
BL / BR = AL / AR
従って、
dB = -B (1 - α) / (1 + α)
dr = B * (TL + TR) - B (1 - α) / (1 + α) * (TL - TR)
dr = B * [(TL + TR) - (1 - α) / (1 + α) * (TL - TR)]
【0170】
前のfix時刻から1秒ずつ位置を伝搬させる推測航法fixを演算するために、
deltaN = dr * cos heading (delta-north);
deltaE = dr * sin heading (delta-east);
heading h(ti) = h0 + Σdhn (n=0,i)
である。AL,AR,BL,およびBRの公証キャリブレーションを推定することを想定して、
1) αを推定するために、+Σdhn (n=0,i) GPSが0である軌道の区画を見つける。この場合、右から左への刻みの比は、次のように定義される。
a. α = TR / TL
2) Bを推定するために、GPSからdrの推定値、およびGPSレンジ変化観測レンジとしての同一観測レンジから同一の車輪刻みを得る。
B = dr / [ (TL + TR) - (1 - α) / (1 + α) * (TL - TR) ]
3) Aを推定するために、GPSからdhの推定値を得て、GPS針路変化観測レンジとしての同一観測レンジからCAN刻みを得る。
A = δh / [ (TL - TR) - (1 - α) / (1 + α) * (TL + TR) ]
4) h0を推定するために、GPS針路が信頼できる場合、合計(dh)およびGPS針路の差を維持する。
DRは、短時間では安定し、長時間では不安定である
GPSは、短時間では不安定であり、長時間では安定である
【0171】
キャリブレーションは、ポイント観測を使用して得られる。これらの観測は、0の中間値である速度情報からそれぞれ導き出されるが、積分は、静止していない。静止している最終キャリブレーションを得るために、GPS位置からの情報が必要である。
GPSからのdEおよびdNの長時間の観測では、
DEgps = ΣdEgps
DNgps = ΣdNgps
【0172】
短時間のキャリブレーションをされたDRから形成された同様の推定値では、
DEdr = ΣdEdr
DNdr = ΣdNdr
である。短時間のキャリブレーションをされたDRから形成された同様の推定値では、3ポイントの合計が例えば使用される。
DEdr = ΣdEdr
= dr1 * sin (h0 + dh1) + dr2 * sin (h0 + dh2 + dh2)
+ dr3 * sin (do + dh1 + dh2 + dh3);
DNdr = ΣdNdr
= dr1 * cos (h0 + dh1) + dr2 * cos (h0 + dh2 + dh2)
+ dr3 * cos (do + dh1 + dh2 + dh3)
【0173】
AおよびBの推定値は、十分に正確であると想定され、その結果、一次テーラー級数を使用することができる。
【0174】
本発明の実施形態は、図8においてカーブ800で表わされる速度効果現象に対する回転刻みを補償する。低速カットオフよりも下の低速セグメント801は、本質的に平坦な線である。低速カットオフと高速カットオフとの間の中間速度セグメント802は、多項式、1 + c1st (s-SL) + c2nd (s-SL)2に従う。高速セグメント303は、係数の規模限界を超えている。
【0175】
速度に関連する効果は、車輪半径の変化のために、速度に対する回転における左右の車輪刻みの回数差の変化をもたらす。換言すれば、異なる速度で得られた同一の回転は、左右の車輪の刻み回数の回数差における相違を生じさせる。その原因は、車輪ワーピングおよび車両サスペンション反応である。
【0176】
より高い速度では、車輪刻みの差として見られる、より大きな量の旋回エネルギが、より低い速度と比較して生じる。勿論、より高い速度で1秒当たりの刻みは多くなり、従って、車輪は、回転刻みから演算される明白な角速度は、速度に対して補償されなければならない。
【0177】
個々の基本デルタ針路更新に入る回転刻み(turn ticks)は、適切に補償(compensate)されなければならず、ここでは、
delta Heading = A * turn ticks
である。回転刻みは、直進するときの車輪半径の差に基づいてルーチン的に補償される。
Delta heading = Aleft * WheelTicksLeft - Aright * WheelTicksRight
= A * (WheelTicksLeft - WheelTicksRight)
- alpha * (WheelTicksLeft + WheelTicksRight)
= A * compensated turn ticks
= A * compTT
である。補償されない回転刻みは、
turnTicks = left wheel ticks - right wheel ticks
である。車輪半径に対する、セグメント801に関する低速補正(1)は、
compensated turn ticks(1)compTT(1)
= turn ticks - alpha * sum ticks;
alpha = 1-ratio / 1+ratio
であり、ここで、「比(ratio)」は、旋回しないときの左車輪刻みで除算された右車輪刻みのフィルタリングされた値である。
【0178】
速度効果CompTT(2)に対するセグメント802の補正は、次の多項式によってcompTT(1)を計る。
1 + c1st (s - SL) + c2nd (s - SL)2
これは、合計刻みの関数であり、ここでは、
s = 合計刻み(sum ticks)
SL = 基準点
低速カットオフ以下、多項式=1
高速カットオフ以上、多項式=coeffScale限界である。
【0179】
デルタ針路キャリブレーションでは、図9に表わされるように、2つの連続したGPS針路観測の差が使用される。個々の針路の時間タグは、GPS測定レンジの中心である。従って、2つのGPS針路の差は、2つのGPS針路の2つの時間タグ間の適用可能性のある時刻を有している。このような理由から、デルタ針路に使用される車輪回転刻みは、デルタレンジ用のものとは異なる時間レンジにあり、デルタレンジが、各針路をそれぞれ形成するのに使用した、より早い速度か、または、より遅い速度であるかに依存して、デルタレンジレンジから0.5秒進んでいるか、または、0.5秒遅れているかのいずれかであることができる。
【0180】
実際には、より早い(またはより遅い)speed1がデルタレンジに使用される。なぜならば、speed2の間隔を延ばすのに必要なすべてのCANbusパケットの受信に遅れが出ることがあるからであり、speed2がCAN通信線(例えば、GPSシリアル・ポートへの変換器へのCAN)上のより多くの迅速なデータを必要とするからである。
【0181】
一般には、左右の車輪回転刻み用の基本式は、各車輪を単純化したスケール因子を使用する。
DH = delta-heading = Aleft * ticks left for DH - Aright * ticks right for DH;
DR = delta-range = Bleft * ticks left for DR + Bleft * ticks right for DR
【0182】
さらに、
DR heading = initial heading from GPS + sum DH;
であるとき、
Delta East = DR sin (DR heading);
Delta North = DR cos (DR heading)
である。
【0183】
実験は、パラメータの推定が見た目ほど単純ではないことを示している。パラメータAおよびBは、全く一定ではなくなっている。それらは、時間と共に変化する。なぜならば、車輪半径が、タイヤ空気圧、外部温度、速度、旋回効果、車両荷重、乗客の配置および人数、タイヤ磨耗などと共に変化するからである。ここで記述する解は、ゆっくりと変化するパラメータとして各パラメータをモデル化するものであり、各々は、異なる時間モデルに応じたものである。
【0184】
多変数非線形系の数式におけるパラメータをすべて解くことが可能であるが、正しい順に行われた場合、実験でパラメータをそれぞれ単一変数の数式の系で独立して演算することができることが分かった。
【0185】
AおよびBに対する左右のパラメータの各々を解くのではなく、
Aright / Aleft = Bleft / Bright = r
1秒間のデルタ針路は、
δh = AL * TL - AR * TR;
【0186】
そして、
AL = A + dA;
AR = A - dA;
δh = (A + dA) TL - (A - dA) TR;
=A * [TL - TR] + dA * [TL + TR];
そして、r = AL / AR = (A + dA) / (A - dA);
【0187】
並べ替えると、
dA = -A (1 - r) / (1 + r)
である。従って、
delta-heading = A * [(TL - TR) - (1 - r) / (1 + r) * (TL + TR)]
= A * compTT
である。ここでは、補償された回転刻みエネルギは、
compTT = (TL-TR) - (1 - r) / ( 1 + r) * (TL + TR)
である。同様に、共通のBパラメータを解くと、
delta-range = B * [(TL + TR) - (1 - α) / (1 + α) * (TL - TR)]
= B * compST
である。ここで、compST=補償された合計刻みである。
【0188】
単純な公式化は、左右の車輪が同一の半径を有効に有していない一般的なケースを扱う。左右の車輪刻み間のバイアスは、車両110が直進していても蓄積する。
【0189】
このパラメータを推定する単純な方法は、車両110が直進または僅かな旋回をする運転状態を分離するために、GPS受信器104または302を使用することである。この条件の下では、比「R」は、積分開始から積分終了までのGPS針路の如何なる変化も、GPS針路の小さな変化である期間に亘って、次のように推定されることができる。
R = sum ticks right / sum ticks left
つまり、開始および終了期間は、(headGPSstart-headGPS)の絶対値が典型的には1°の閾値以下であるときに考慮される。
【0190】
デルタ針路の推定値は、如何なるGPS針路誤差、および車輪回転刻み差における正確な旋回エネルギを生じさせる車両110の針路の如何なる真の変化も含んでいる。
【0191】
これとすべての一般的な変化状態とを提供するために、個々のrの推定値は、単一状態のカルマン・フィルタでブレンドされる。各々の測定値に対する雑音モデルは、2つのGPS針路推定値の信頼性を明らかにする。カルマン・フィルタ用の処理雑音モデルは、比のパラメータがどのくらい速く変化することができるかを提供するように調整される。
【0192】
処理ノイズは、車両110が長時間停止するときは常に大きく設定される。なぜならば、車両荷重の変化が、タイヤ半径に著しく影響することがあるからである。処理ノイズを定常状態に均一化することは、比の推定値が5分毎に条件の変化を提供することを可能にする。
【0193】
都会の峡谷および/または非常に弱い信号状態で動作する場合、GPS針路推定値は、不安定で信頼性が低くなることがある。非常に大きい雑音モデルを使用しなければならない。選抜除去スキームは、正常値から遠過ぎるような、対応するカルマン・フィルタからの如何なるレンジ外の測定値も選抜除去するために使用される。
【0194】
そのような比は、車両110が直進するか、または、正味の針路変化が0に相殺される(例えば、15°の右旋回に続いて15°の左旋回)場合は、常に推定されることができる。比は、車輪半径の差を補償し、走行を真っ直ぐにする。盲目的に1.0の比を適用すると、推測航法伝搬は、直線道路を実際に走行する場合であっても、大きなカーブを持った経路を計画することができる。
【0195】
経験的には、項AおよびAleftおよびArightが車両110のサスペンションの動作の仕方によって旋回の間に現実から逸れることがあることが分かった。一般に、オーバーステアリングの印象をもたらす旋回エネルギがもっと観測される(つまり、対地追跡は、真の針路変更よりも大きいものを示す)。
【0196】
この効果を補償するために、速度補償パラメータ「C」がここでは導入され、車輪半径の任意の実際の差によって既に補償された回転刻みをさらに補償する。Cパラメータの一般形態は、値0:1である。低速では、Cパラメータは、0近傍であり、高速では、それは収束するが、1には到達しない。
【0197】
Cパラメータは、推定するのがより難しい。なぜならば、それは、車両110にとって可能な全速度レンジに亘る旋回条件についての観測を必要とするからである。従って、ベースラインまたはデフォルト・モデルが利用される。Cパラメータは、車両110の寿命に亘って別の単一状態カルマン・フィルタで頻繁に改善される。
【0198】
Cパラメータの典型的な形態は、LowSpeedCutOffと呼ばれる0の速度からベースライン値までの単位である。その後、カーブは、低下し、カーブが固定のより低い値で平坦に留まる最大速度まで直線的になる。中間領域の傾斜は、リアルタイムで推定される。速度表現を単純化するための独立変数は、左右の車輪回転刻みの合計であり、ここでは、sumTicksと呼ばれる。
【0199】
Cパラメータを推定するためのモデル化数式は、
deltaHeading = A *(1 + C * (compST - LowSpeedCutOff)) *compTT
である。Cパラメータの推定値は、次のように形成されることができる。
C estimate = (deltaHeadingGPS - A * compTT)
/ (A *compTT * (compST - LowSpeedCutOff))
Aパラメータのベースライン推定値が必要であり、Cパラメータには、単位がない。
【0200】
Aパラメータは、左右の車輪間の車輪回転刻みの変化を針路変化に変換する。次いで、針路変化は、合計推測航法針路を生成するために任意の定数で積分される。Aパラメータの演算は、デルタ針路を得ることができる少なくとも2つのGPS速度推定値を収集すること、および、同一の積分期間に対応する補償された回転刻み推定値を収集することを必要とする。従って、
【0201】
A-estimate = deltaHeadingGPS / (compTT * C)
である。ここで、A推定値(A-estimate)は、回転刻み当たりラジアンである。
【0202】
実験は、精度がGPS針路測定値の品質に依存することを示している。ソフトウェア・プログラミングは、針路を推定する少なくとも2つの方法を有するべきである。例えば、最小二乗バッチ推定器は、1つの時間間隔において得られた1セットのGPSドップラー測定値から東方および北方速度を推定し、従って、それは、動的モデルを有しないので、力学の下では遅れを持たない。別の例では、推定器は、各GPSドップラー測定値の複雑な測定誤差モデルと、GPS速度および位置がどのようにエポックからエポックへと変化するかの複雑なモデルを備えた航法カルマン・フィルタを備えている。より高い雑音比を持った弱い信号条件の下では、カルマン・フィルタは、東方および北方速度におけるより少ない変わり易さを提供する。
【0203】
もう1つの単一状態カルマン・フィルタは、A推定値の時系列を共にブレンドするために使用される。A推定値はそれぞれ、GPS針路成分における誤差モデルに基づいた測定誤差モデルを有している。タイヤ条件を変更するようにゆっくりと適応させるフィルタの時定数を設定する処理雑音モデルが含まれている。
【0204】
A推定値は、2つの他のパラメータ、車輪半径比r、および速度補償モデルCに依存する。Aパラメータは、初期の実際の動作から連続的に推定され、パラメータをそれぞれ推定することができるまで、比およびデフォルト・モデルに対して1つの値を使用する。
【0205】
パラメータBを推定する際に、デルタレンジ・パラメータBは、推測航法に対する速度を設定するために使用される。それは、左右の車輪回転刻みの合計を推測航法速度に変換する。パラメータBは、GPS速度および補償された合計刻み測定値(compST)を使用して次のように推定される。
B-estimate = GPS speed in one second / compST in one second
B推定値は、単一状態のカルマン・フィルタでブレンドされ、ここでは、測定ノイズは、GPS速度誤差の推定値の関数である。カルマン・フィルタに対する処理ノイズは、Bが時間と共にどのように変化するかの時定数を設定する。一般に、タイヤは、様々な速度および車両荷重で圧縮および膨張する。従って、含めるべき処理ノイズの量は、5分の時定数程度を有するように設定される。
【0206】
針路オフセットOパラメータについては、1セットの新しい左右の車輪回転刻みからの推測航法位置の変化を推定するために、推測航法からの絶対針路推定値を有することが必要である。このパラメータは、ここではDR_headingと呼ばれる。
DR_heading = heading offset + sum of all delta-headings
針路オフセットは、最初の信頼できるGPS針路が利用可能になった場合に、最初にセットされる(例えば、GPS受信器が、毎秒数m以上の速度で移動すると直ぐに)。初期化するには、
Heading offset = Heading from last fix
である。そして、更新するには、
DR heading on first update = heading offset + deltaHEading1
である。2回目の更新では、
DR heading = heading offset + deltaHeading1 + deltaHeading2;
= heading offset + sum of all DR deltaHeadings;
= heading offset + sumDeltaHeading
である。
【0207】
もしすべてのそのようなデルタ針路推定値の合計が完全ならば、針路オフセットは、固定した定数になり、更新される必要がない。しかし、実際には、針路オフセットは、システム雑音およびモデル化失敗によってかなり急速に変化する場合がある。針路オフセットを正確にしておくために針路オフセットを連続的に推定するためには、別の信号状態のカルマン・フィルタが必要である。
The heading offset estimate, O = GPS heading - sumDeltaHeading
そして、GPS針路誤差推定値に基づいた測定雑音モデルに応じたすべての針路オフセット推定値とブレンドされる。時定数は、約5分にセットされる。
【0208】
要約すると、キャリブレーションは、表VIIにおいて次のように進行する。
【表7】
【0209】
本発明の一実施形態は、密結合GPSと、ホスト・コンピュータ中のGPSアプリケーションとして実行するための推測航法ソフトウェア・アプリケーション・プログラムとを備えている。それは、車輪を備えた車両上のGPS測定プラットフォーム(MP)から測定値を受信するように接続される。例えば、車輪112,114,116,および118を備えた車両110(図1)上のMP704(図7)である。密結合GPSおよび推測航法ソフトウェア・アプリケーション・プログラムは、時間、fixトリガ、ドップラー、および擬似レンジ報告をGPS測定プラットフォームから収集するための入力処理を含んでいる。GPS時間からホスト・コンピュータ時間へのオフセット演算処理は、車両によって生成されるそうでなければ非同期なデータをGPS時間に揃えるために使用される。最小二乗スナップショット推定値は、位置(P)、速度(V)、車輪半径および比に対するキャリブレーション・パラメータ(B)、デルタ針路およびデルタレンジ(D)、ならびに個々の新しい位置fixおよびGPSシステム時刻に基づいた時間に対して演算される。カルマン・フィルタは、位置(P)、速度(V)、車輪半径および比に対するキャリブレーション・パラメータ(B)、デルタ針路およびデルタレンジ(D)、ならびに時間に対して含まれ、構成され、また、推測航法デルタレンジ、デルタ針路、複合モードを処理し、伝搬する。
【0210】
連続モード選別処理は、GPS解および車輪データ・キャリブレーションの利用可能性に依存して、GPS単独モード、推測航法単独モード、またはGPSおよび推測航法の両方の複合モードでの動作を選択する。新しいfix演算処理は、ハードウェア事前データを演算し、時間オフセット演算処理に接続されたGPSミリ秒タイマを調整する。バッファ・プロセッサは、車両の車輪トランスデューサによって測定される車輪回転刻みに関するタイムスタンプを押したCANbusデータを収集する。推測航法キャリブレーションのカルマン・フィルタは、左右の車輪のdelta-heading/tick差に対するALおよびARキャリブレーション・パラメータ、ならびに、左右の車輪のdelta-range/tickに対するBLおよびBRキャリブレーション・パラメータ、ならびに、合計デルタ針路を既知の針路基準に平行移動させるための針路オフセット・キャリブレーション・パラメータを処理する。推測航法データ・プロセッサは、データをバッファ・プロセッサからカルマン・フィルタによって後の処理のためのデルタレンジ、デルタ針路、およびデルタ針路合計の情報に変換するものであり、推測航法誤差モデルを備えている。アプリケーション・プログラミング・インタフェース(API)は、新しい航法fixを出力する。
【0211】
密結合GPSおよび推測航法ソフトウェア・アプリケーション・プログラムは、GPS受信器単独、DRコンピュータ単独、およびGPS受信器およびDRコンピュータの両方を含んだ複合モードを含む3つのモードのうちの1つで動作するモード選択処理をさらに含むことができる。GPS受信器単独モードにおける動作は、GPS fixが利用可能であり、十分に一貫して利用可能な衛星ビークルが存在し、2基を超える衛星ビークルが追跡されている場合に生じる。DRコンピュータ単独モードにおける動作は、GPS fixが利用可能ではない、または、2基以下の衛星ビークルが追跡されている場合に生じる。そして、複合モードにおける動作は、検査から、2基以下の衛星ビークルが追跡されている、または、十分に一貫して利用可能な衛星ビークルが存在しない、および、キャリブレーションが利用可能であり、確認される場合に生じる。新しい航法fixは、APIを通じてその後出力される。
本発明の実施例では、ポジションフィードバックを提供するために、道路マッピングを使用する。ユーザ・ナビゲーション・システムが車両で移動し、当該車両は道路上を走行してると仮定する。道路マッピングにおいて全ての道が既知であると仮定するが、新規な建造物、修理中および迂回路等により、必ずしも真ではない。通常、ロード・マッピング・データベースが一般に年に一度だけしか更新されないDVDディスクに格納される上、ユーザは2〜3年に一度しか最新版を買わないのが常である。従って、オフロードの移動を考慮すると、フィードバックには若干の適応が必要となる。
時間および位置の評価は、GPSの廃止および停止期間の間に推測航法によってアシストするフィードバックとして提供される。推定された時間および位置が有効である為には、GPS停止期間だけでなく、GPS停止期間より前に、フィードバック・プロセスが初期化されデータが一定の基準を満たさなければならない。
有効に適用される為には、フィードバックプロセスは、定期的に行わなければならない(例えば、5秒毎、あるいは毎秒)。1GPSエポックの遅延とともに位置が出力された後、フィードバックされる。次のfixが処理されるまでであれば、フィードバックはいつされても構わない。実際には、直前の出力の800ミリ秒以内である。2 GPSエポック以降になされるフィードバックは価値がなく、廃棄される。
図10Aにおいてスケジュール1000は、対応するfixの1秒以内にフィードバックがなされることを示しており、例えば fix x、fix x+1、fix x+2、fix x+3、fix x+4、fix x+5、fix x+6に対して各々、フィードバックx、フィードバックx+1、フィードバックx+2、フィードバックx+3、フィードバックx+4、フィードバックx+5等と続いている。図10Bにおいてフィードバック・スケジュール1050は、対応するfixの1〜2秒の間にフィードバックがなされることを示しており、例えば fix x、fix x+1、fix x+2、fix x+3、fix x+4、fix x+5、fix x+6に対して各々、フィードバックx-1、フィードバックx、フィードバックx+1、フィードバックx+2、フィードバックx+3、フィードバックx+4等と続いている。フィードバックメッセージのフォーマットは以下の通りであり、
PERDAPI,ETPOS,TIME,LAT,N/S,LON,E/W,HEAD,CHKS;
ここで、
PERDAPIは、PERDアプリケーション・プログラミングインタフェース;
ETPOSは、推定された時間および位置センテンスのインジケータ;
TIMEは、フィードバック時間;
LATは、フィードバック緯度;
N/Sは、北/南;
LONは、フィードバック経度;
E/Wは、東/西;
HEADは、フィードバック針路;
CHKSは、チェックサム;
を表している
11A図、11Bおよび12は、フィードバックの実施例を2つの図で示している。まず図11Aおよび11B図において、1100は情報を確認し、構造をアップデートする。ロードマッピングからの情報と共に入力されるフィードバックセンテンスは、受信時に確認される。フィードバック構造は、フィードバック情報および位置/速度/時間(つまり速度および針路を含む)を導出した、対応するGPS受信機の両方を含む。フィードバック構造(GPSおよびフィードバック情報)のデータは、DR推測航法のために同データが使えるかどうかを決定する為に分析される。
具体的には図11Aで、ロードマッピングからの情報と共に入力されるフィードバックセンテンスは、図10Aで示したようにフィードバックがfix から1秒未満に届いたかどうかを判断する為に、ステップ1102でテストされる。そうでない場合、ステップ1104は、図10Bで示したようにフィードバックがfix から2秒未満に届いたかどうかを判断する為にためにテストされる。YESの場合は、ステップ1106は、フィードバック入力データが有効なことを示すためのフラグをセットする。NOの場合は、ステップ1108は、フィードバック入力データが有効でないことを示すためのフラグをセットする。ステップ1110は、適当な待ち時間をセットして、十進数で示した分から緯度、経度および高度(LLA)を算出し、構造をフィードバック情報と関連するGPSのfix情報で満たす。最初のコアライブラリ処理は、フィードバック推定された時間および位置構造を投入し、フィードバックの信頼および有効性評価を更新するために用いられる。試作機において、これらの2つの機能は、tpSetDrEtPositionおよびpfDrEtUpdateConfと命名された。情報の結果は後段のDR推測航法で用いられる。
図11Bにおいて、フィードバックが遅れる場合、ステップ1114はフィードバック位置をずらし、ポジションフィードバックによる推定時間および位置の構造を埋める。ステップ1116は、入力データ・フラグが有効に設定されたかどうか確認する。NOの場合は、ステップ1118で、いかなる針路調整も無効にする。YESの場合は、ステップ1120で、参照およびフィードバックの針路間、今回および前回のフィードバック針路間、今回および前回の参照(GPS)針路間、そして、参照およびフィードバックの位置間の差分を算出する。フィードバックおよび参照(GPS)針路の連続的な針路誤差、同じく位置誤差およびフィードバックおよび参照の針路誤差は、回転フラグ、良好であるというフィードバック・フラグおよびエラーというフィードバック・フラグをセットするために用いる。良好であるというフィードバック・フラグを立てる為には、定性的にフィードバック・データおよびGPSデータから同様の針路誤差および安定した位置誤差でなければならない。針路誤差が同様でなかったり、あるいは位置誤差がまちまちである場合には、エラーというフィードバック・フラグをセットする。
ステップ1122は良好であるというフィードバック・フラグをテストし、真ならば、ステップ1124は信頼評価値を上げる。ステップ1126はエラーというフィードバック・フラグをテストし、真ならば、ステップ1128は信頼評価値を低下させる。良好でもエラーでもないフィードバック・フラグが立つ場合には、信頼評価値は変わらない。フラグを立てるエラーのフィードバックが真であるかをステップ1129は調べる。Noの場合には、ステップ1130は、針路調整を更新する。それ以外では、ステップ1118はいかなる針路調整を無効にする。
図12において後半の1200は、DR推測航法を表している。適切に推定された時間および位置構造が決定される。通常の場合、前回のGPS/DR fixから求まる。フィードバックがあり、品質試験にパスすると、フィードバック推定時間および位置構造が用いられる。いくつかのfixは通常のDR推測航法に続き、有効なフィードバック測位は、この位置までジャンプすることを誘発し、フィードバック構造を用いる条件に再び合うまで、通常のDR推測航法に続いて再びDR針路和に対して補正が誘発される。
DR推測航法において、どの測位構造、即ちフィードバック測位か前回のfixからの通常の測位、を使用するべきか決定がなされます。全てのGPS fixは、通常の推定時間および位置構造を使用する。DR fixだけの間、レンジは更新され、DRモードで作動しないときには、ゼロにリセットされる。
具体的には、ステップ1202は、フィードバック位置信頼評価値を加えて、前回のフィードバック使用時からのレンジを更新する。ステップ1204は、前回のフィードバック利用時から十分な距離を移動したか、ポジションフィードバックの最小限の信頼評価値があるか、フィードバック測位値が古過ぎないか、さらに、確認された針路修正があるか、をみている。そういった場合には、ステップ1206は調整済DR針路合計値の誤差を正し、ステップ1208はDR推測航法のためのフィードバック推定時間および位置構造を使用する。それ以外では、ステップ1210は、DR推測航法のための通常の推定時間および位置構造を使用する。
「回転中」とは、8度以上のフィードバック針路変化または8度以上の参照針路変化で定義される。悪いフィードバックは、フィードバックおよび参照針路が悪い針路制限値を上回り、さらに回転中である時で定義される。もしくは、フィードバックおよび参照位置が、35メートル以上で、位置不確定度(posSigma)が35メートル未満の時、もしくは、フィードバックおよび参照位置が、50メートルを超える間隔で定義される。、良好であるというフィードバックは、GPSモードである、かつ、フィードバックおよび参照位置が20メートル未満間隔で、フィードバックおよび参照針路は5度未満、で定義される。悪い針路制限は、10度さらに針路変化の12%であり、180度でキャップされる。非常に大きく回転した場合、悪いフィードバックは最高32度の値まで針路誤差を示さない限り宣言されない。最大位置信頼度は12であり、使用できるという評価閾値は6である。位置および針路は、DRの軌跡の100m毎で更新される。
【0212】
要約すると、表VIIIは、CANフレームにおける車輪刻みに対するパラメータについて記述し、表IXは、APIによって設定される速度補償パラメータを列挙している。
【表8】
【表9】
アルゴリズム
C1を推定するためのモデル式は、
dh = A * (1 + C1 * (SumT - LowSpeedCutOff)) * dT
である。並べ替えると、
C1 = (dh - A * dT) / (A * dT * (SumT - LowSpeedCutOff))
である。ここで、
TL:左車輪刻み(Left wheel ticks)
TR:右車輪刻み(Right wheel ticks)
A:デルタ針路を演算するためのパラメータ
Ratio:「Ratio = TL / TR」の数式に対して推定される左右の車輪刻みの比
SumT:車輪刻みの合計は、「SumT = TL + TR」として定義される
dT:車輪刻みの差は、「dT = (TL - TR) + (1 - Ratio) / (1 + Ratio) * SumT」として定義される。
【0213】
本発明の特定の実施形態は、記述され図示されたが、それは本発明を限定するようには意図していない。修正および変更が疑いなく当業者には明白であり、本発明が添付の特許請求の範囲によってのみ限定されることが意図されている。
【符号の説明】
【0214】
100、300 GPSおよび慣性航法複合システム
102 ディスプレイ
103、318 ロード・マップ・ディスクおよびプレーヤ
104、302 GPS受信器
106、306 アンテナ
108 DRコンピュータ
110 車両
112、114 前側の2つの操舵可能な車輪
116、118 後ろ側の2つの操舵しない車輪
120、122、124、126 アンチロック・ブレーキング・システム(ABS)トランスデューサ
128 ABSコントローラ
130 CANBus
132、134、136、138 ノード
202 アンテナ
204 航法測定プラットフォーム(MP)
206 32チャネル無線周波数(RF)受信器
208 ベースバンド
210 シリアル・インタフェース
212 ホストプロセッサ
214 ユーザアプリケーション
216 クライアント・ソフトウェア
218 機能API
222 CANBusインタフェース
224 CANBus
250 位置、速度、時間(PVT)モジュール
252 マイクロコントローラ(CPU)
254、260 UART
256 シリアル双方向インタフェース
304 GPS測位器
308 GPS衛星
310 推測航法伝搬プロセッサ
312 車輪刻み
314 モード選択器
316 複合器
328 DRキャリブレーション
【特許請求の範囲】
【請求項1】
車両に搭載され、軌道上の航行衛星からの信号伝送の障害を受けるGPS受信器と、
該GPS受信器に結合され、前記信号障害の期間中に推測航法(DR)によって演算されるレンジおよび針路情報を提供するDRコンピュータであって、車両航法解および支援がユーザへのスクリーン表示装置を通じて継続的に利用可能であることと、
DRコンピュータに結合され、前記車両を支持する個々の車輪の回転に関する回転データを提供する車輪刻みセンサと、
該車両航法解に適合する道路セグメント情報を持つロードマップデータベースと、
を備えたカーナビゲーションシステムにおいて、
前記個々の車輪の真の半径の推定値を特徴とし、
該個々の車輪の真の半径の推定値は、レンジの変化(つまり、デルタレンジ)および針路変化(つまり、デルタ針路)、前記車両の動作に関する情報を生成するために、車輪刻みセンサからの前記回転データと組み合わせられ、
前記デルタレンジおよびデルタ針路情報は、前記GPS受信器から周期的に得られる絶対位置情報からの前記DRコンピュータによって伝搬され、前記推測航法の結果は、単独で、場合によって、車両航法解として出力され、
前記ロードマップデータベースから提供された道路セグメント情報が、前記車両推測航法解に適合され、GPS停止期間中に積算された推測航法解の誤差を補正するのに用いられ、
前記車両航法解および支援は、ユーザへのスクリーン表示装置を通じて継続的に利用可能とされ、前記GPS受信器から単独で、前記DRコンピュータによって単独で、または前記GPS受信器および前記DRコンピュータによって提供される複合物から導き出されるカーナビゲーションシステム。
【請求項2】
前記GPS受信器から単独で、DRコンピュータから単独で、または、前記GPS受信器および前記DRコンピュータの両方によって提供される複合物からの前記車両航法解を選択し、導き出すコンピュータ・プログラムをさらに備える請求項1記載のカーナビゲーションシステム。
【請求項3】
GPS受信器単独、DRコンピュータ単独、ならびに前記GPS受信器および前記DRコンピュータの両方を含む複合モードを含んだ3つのモードのうちの1つで動作するコンピュータ・プログラムをさらに備え、
前記GPS受信器単独モードにおける動作は、GPS fixが利用可能である、十分に一貫して利用可能な衛星ビークルがある、および、2基を超える衛星ビークルが追跡されている場合に生じ、
前記DRコンピュータ単独モードにおける動作は、GPS fixが利用可能ではない、または、2基以下の衛星ビークルが追跡されている、および、キャリブレーションが利用可能である場合に生じ、
前記複合モードにおける動作は、検査から、2基以下の衛星ビークルが追跡されている、または、十分に一貫して利用可能な衛星ビークルがない、および、キャリブレーションが利用可能であり、確認された場合に生じる請求項1記載のカーナビゲーションシステム。
【請求項4】
プログラム可能な永続的停止ビットと、
GPS測定ハードウェアの起動の直後に続く条件付きプログラムの分岐であって、その条件付き分岐が、前記プログラム可能な永続的停止ビットのステータスに依存し、キャリブレーションが利用可能であり、且つ、前記プログラム可能な永続的停止ビットが真である場合に、前記DRコンピュータ単独モードに制御を転送するか、または、前記プログラム可能な永続的停止ビットが無秩序である場合、GPS fixが利用可能であるときに、前記GPS単独モードに制御を転送することとをさらに備える請求項3記載のカーナビゲーションシステム。
【請求項5】
前記個々の車輪のそれぞれの前記真の半径に対する推定値の継続的なキャリブレーションのための自動処理をさらに備え、前記GPS受信器から周期的に得られる絶対位置情報は、車輪刻みセンサによって提供される前記回転データと比較される請求項1記載のカーナビゲーションシステム。
【請求項6】
コントローラ・エリア・ネットワーク(CAN)から受信した車輪刻み回転データのパケットを受信するバッファおよびタイムスタンプ処理と、
該バッファおよびタイムスタンプ処理からの前記車輪刻み回転データを推定およびキャリブレーションする推測航法カルマン・フィルタとをさらに備える請求項1記載のカーナビゲーションシステム。
【請求項7】
前記個々の車輪のそれぞれの前記真の半径に近似するように演算され、推測航法解に対するデルタレンジ、デルタ針路、およびデルタ針路合計の推定値を提供するために使用される初期化値をさらに備える請求項1記載のカーナビゲーションシステム。
【請求項8】
車輪半径の推定値を調整する速度効果補償をさらに備える請求項1記載のカーナビゲーションシステム。
【請求項9】
ホスト・コンピュータにおいてGPSアプリケーションとして実行され、車輪を備えた車両上のGPS測定プラットフォーム(MP)から測定値を受信するように接続された、密結合GPS、推測航法、およびマップマッチング航法ソフトウェア・アプリケーション・プログラムであって、
車輪を備えた車両上に搭載されたGPS測定プラットフォーム(MP)装置からの時間、fixトリガ、ドップラー、および擬似レンジ報告を収集する入力処理と、
前記車両によって生成される、本処理なしには非同期のデータをGPS時間に揃える、GPS時間からホスト・コンピュータ時間へのオフセット演算処理と、
各々の新しい位置fixおよびGPSシステム時刻に基づいた位置(P)、速度(V)、車輪半径および比に対するキャリブレーション・パラメータ(B)、デルタ針路およびデルタレンジ(D)、ならびに時間に対する最小二乗スナップショット推定器と、
位置(P)、速度(V)、車輪半径および比に対するキャリブレーション・パラメータ(B)、デルタ針路およびデルタレンジ(D)、ならびに時間に対して構成され、推測航法デルタレンジ、デルタ針路、複合モード、および伝搬を処理するカルマン・フィルタと、
GPS解および車輪データ・キャリブレーションの利用可能性に依存して、GPS単独モード、推測航法単独モード、またはGPSおよび推測航法の両方の複合モードで動作する連続モード選択処理と、
ハードウェア事前データを演算し、前記時間オフセット演算処理に接続されたGPSミリ秒タイマを調整する新しいfix演算処理と、
車両の車輪トランスデューサによって測定される車輪回転刻みに関するタイムスタンプを押したCANbusデータを収集するバッファ処理と、
左右の車輪のデルタ針路/tick差に対するALおよびARキャリブレーション・パラメータ、ならびに、左右の車輪のデルタレンジ/tickに対するBLおよびBRキャリブレーション・パラメータ、ならびに、合計デルタ針路を既知の針路基準に平行移動させる針路オフセット・キャリブレーション・パラメータを処理する推測航法キャリブレーション・カルマン・フィルタと、
該カルマン・フィルタによる後の処理のために、データを前記バッファ処理からデルタレンジ、デルタ針路、およびデルタ針路合計の情報に変換し、推測航法誤差モデルを含んだ推測航法データ処理と、
GPS停止期間中に積算された推測航法解の誤差を補正する道路セグメントマッチング処理と、
新しい航法fixを出力するアプリケーション・プログラミング・インタフェース(API)とを備えるアプリケーション・プログラム
【請求項10】
GPS受信器単独、DRコンピュータ単独、ならびに前記GPS受信器および前記DRコンピュータの両方を含む複合モードを含んだ3つのモードのうちの1つで動作するモード選択プログラムをさらに含み、
前記GPS受信器単独モードにおける動作は、GPS fixが利用可能である、十分に一貫して利用可能な衛星ビークルがある、および、2基を超える衛星ビークルが追跡されている場合に生じ、
前記DRコンピュータ単独モードにおける動作は、GPS fixが利用可能ではない、または、2基以下の衛星ビークルが追跡されている、および、キャリブレーションが利用可能である場合に生じ、
前記複合モードにおける動作は、検査から、2基以下の衛星ビークルが追跡されている、または、十分に一貫して利用可能な衛星ビークルがない、および、キャリブレーションが利用可能であり、確認された場合に生じ、
新しい航法fixは、前記APIを通じてその後出力される請求項9記載の密結合GPSおよび推測航法ソフトウェア・アプリケーション・プログラム。
【請求項1】
車両に搭載され、軌道上の航行衛星からの信号伝送の障害を受けるGPS受信器と、
該GPS受信器に結合され、前記信号障害の期間中に推測航法(DR)によって演算されるレンジおよび針路情報を提供するDRコンピュータであって、車両航法解および支援がユーザへのスクリーン表示装置を通じて継続的に利用可能であることと、
DRコンピュータに結合され、前記車両を支持する個々の車輪の回転に関する回転データを提供する車輪刻みセンサと、
該車両航法解に適合する道路セグメント情報を持つロードマップデータベースと、
を備えたカーナビゲーションシステムにおいて、
前記個々の車輪の真の半径の推定値を特徴とし、
該個々の車輪の真の半径の推定値は、レンジの変化(つまり、デルタレンジ)および針路変化(つまり、デルタ針路)、前記車両の動作に関する情報を生成するために、車輪刻みセンサからの前記回転データと組み合わせられ、
前記デルタレンジおよびデルタ針路情報は、前記GPS受信器から周期的に得られる絶対位置情報からの前記DRコンピュータによって伝搬され、前記推測航法の結果は、単独で、場合によって、車両航法解として出力され、
前記ロードマップデータベースから提供された道路セグメント情報が、前記車両推測航法解に適合され、GPS停止期間中に積算された推測航法解の誤差を補正するのに用いられ、
前記車両航法解および支援は、ユーザへのスクリーン表示装置を通じて継続的に利用可能とされ、前記GPS受信器から単独で、前記DRコンピュータによって単独で、または前記GPS受信器および前記DRコンピュータによって提供される複合物から導き出されるカーナビゲーションシステム。
【請求項2】
前記GPS受信器から単独で、DRコンピュータから単独で、または、前記GPS受信器および前記DRコンピュータの両方によって提供される複合物からの前記車両航法解を選択し、導き出すコンピュータ・プログラムをさらに備える請求項1記載のカーナビゲーションシステム。
【請求項3】
GPS受信器単独、DRコンピュータ単独、ならびに前記GPS受信器および前記DRコンピュータの両方を含む複合モードを含んだ3つのモードのうちの1つで動作するコンピュータ・プログラムをさらに備え、
前記GPS受信器単独モードにおける動作は、GPS fixが利用可能である、十分に一貫して利用可能な衛星ビークルがある、および、2基を超える衛星ビークルが追跡されている場合に生じ、
前記DRコンピュータ単独モードにおける動作は、GPS fixが利用可能ではない、または、2基以下の衛星ビークルが追跡されている、および、キャリブレーションが利用可能である場合に生じ、
前記複合モードにおける動作は、検査から、2基以下の衛星ビークルが追跡されている、または、十分に一貫して利用可能な衛星ビークルがない、および、キャリブレーションが利用可能であり、確認された場合に生じる請求項1記載のカーナビゲーションシステム。
【請求項4】
プログラム可能な永続的停止ビットと、
GPS測定ハードウェアの起動の直後に続く条件付きプログラムの分岐であって、その条件付き分岐が、前記プログラム可能な永続的停止ビットのステータスに依存し、キャリブレーションが利用可能であり、且つ、前記プログラム可能な永続的停止ビットが真である場合に、前記DRコンピュータ単独モードに制御を転送するか、または、前記プログラム可能な永続的停止ビットが無秩序である場合、GPS fixが利用可能であるときに、前記GPS単独モードに制御を転送することとをさらに備える請求項3記載のカーナビゲーションシステム。
【請求項5】
前記個々の車輪のそれぞれの前記真の半径に対する推定値の継続的なキャリブレーションのための自動処理をさらに備え、前記GPS受信器から周期的に得られる絶対位置情報は、車輪刻みセンサによって提供される前記回転データと比較される請求項1記載のカーナビゲーションシステム。
【請求項6】
コントローラ・エリア・ネットワーク(CAN)から受信した車輪刻み回転データのパケットを受信するバッファおよびタイムスタンプ処理と、
該バッファおよびタイムスタンプ処理からの前記車輪刻み回転データを推定およびキャリブレーションする推測航法カルマン・フィルタとをさらに備える請求項1記載のカーナビゲーションシステム。
【請求項7】
前記個々の車輪のそれぞれの前記真の半径に近似するように演算され、推測航法解に対するデルタレンジ、デルタ針路、およびデルタ針路合計の推定値を提供するために使用される初期化値をさらに備える請求項1記載のカーナビゲーションシステム。
【請求項8】
車輪半径の推定値を調整する速度効果補償をさらに備える請求項1記載のカーナビゲーションシステム。
【請求項9】
ホスト・コンピュータにおいてGPSアプリケーションとして実行され、車輪を備えた車両上のGPS測定プラットフォーム(MP)から測定値を受信するように接続された、密結合GPS、推測航法、およびマップマッチング航法ソフトウェア・アプリケーション・プログラムであって、
車輪を備えた車両上に搭載されたGPS測定プラットフォーム(MP)装置からの時間、fixトリガ、ドップラー、および擬似レンジ報告を収集する入力処理と、
前記車両によって生成される、本処理なしには非同期のデータをGPS時間に揃える、GPS時間からホスト・コンピュータ時間へのオフセット演算処理と、
各々の新しい位置fixおよびGPSシステム時刻に基づいた位置(P)、速度(V)、車輪半径および比に対するキャリブレーション・パラメータ(B)、デルタ針路およびデルタレンジ(D)、ならびに時間に対する最小二乗スナップショット推定器と、
位置(P)、速度(V)、車輪半径および比に対するキャリブレーション・パラメータ(B)、デルタ針路およびデルタレンジ(D)、ならびに時間に対して構成され、推測航法デルタレンジ、デルタ針路、複合モード、および伝搬を処理するカルマン・フィルタと、
GPS解および車輪データ・キャリブレーションの利用可能性に依存して、GPS単独モード、推測航法単独モード、またはGPSおよび推測航法の両方の複合モードで動作する連続モード選択処理と、
ハードウェア事前データを演算し、前記時間オフセット演算処理に接続されたGPSミリ秒タイマを調整する新しいfix演算処理と、
車両の車輪トランスデューサによって測定される車輪回転刻みに関するタイムスタンプを押したCANbusデータを収集するバッファ処理と、
左右の車輪のデルタ針路/tick差に対するALおよびARキャリブレーション・パラメータ、ならびに、左右の車輪のデルタレンジ/tickに対するBLおよびBRキャリブレーション・パラメータ、ならびに、合計デルタ針路を既知の針路基準に平行移動させる針路オフセット・キャリブレーション・パラメータを処理する推測航法キャリブレーション・カルマン・フィルタと、
該カルマン・フィルタによる後の処理のために、データを前記バッファ処理からデルタレンジ、デルタ針路、およびデルタ針路合計の情報に変換し、推測航法誤差モデルを含んだ推測航法データ処理と、
GPS停止期間中に積算された推測航法解の誤差を補正する道路セグメントマッチング処理と、
新しい航法fixを出力するアプリケーション・プログラミング・インタフェース(API)とを備えるアプリケーション・プログラム
【請求項10】
GPS受信器単独、DRコンピュータ単独、ならびに前記GPS受信器および前記DRコンピュータの両方を含む複合モードを含んだ3つのモードのうちの1つで動作するモード選択プログラムをさらに含み、
前記GPS受信器単独モードにおける動作は、GPS fixが利用可能である、十分に一貫して利用可能な衛星ビークルがある、および、2基を超える衛星ビークルが追跡されている場合に生じ、
前記DRコンピュータ単独モードにおける動作は、GPS fixが利用可能ではない、または、2基以下の衛星ビークルが追跡されている、および、キャリブレーションが利用可能である場合に生じ、
前記複合モードにおける動作は、検査から、2基以下の衛星ビークルが追跡されている、または、十分に一貫して利用可能な衛星ビークルがない、および、キャリブレーションが利用可能であり、確認された場合に生じ、
新しい航法fixは、前記APIを通じてその後出力される請求項9記載の密結合GPSおよび推測航法ソフトウェア・アプリケーション・プログラム。
【図1】


【図2】
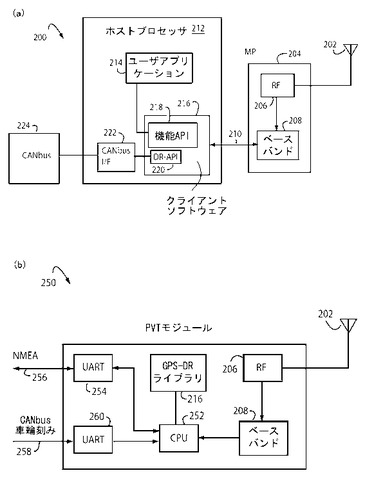
【図3】
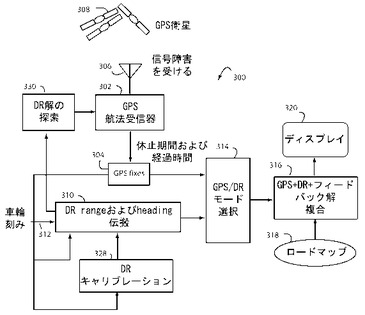
【図4】
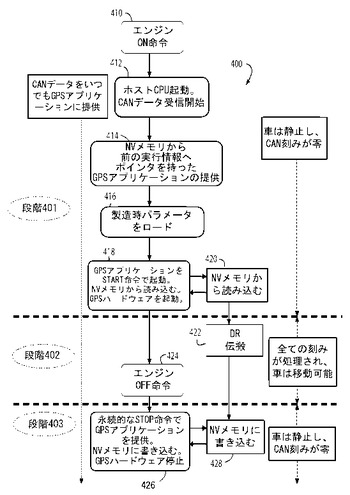
【図5】
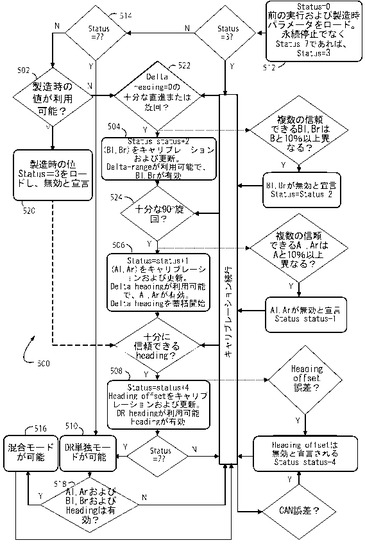
【図6】
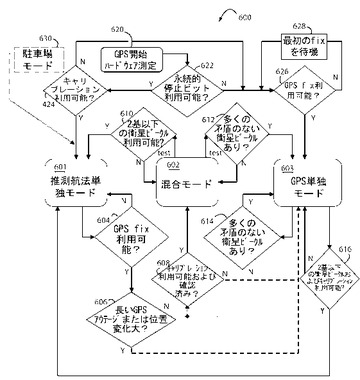
【図7】
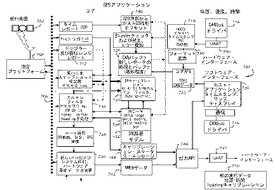
【図8】
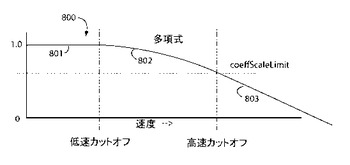
【図9】
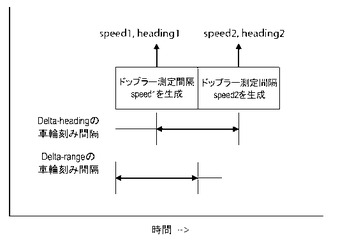
【図10】
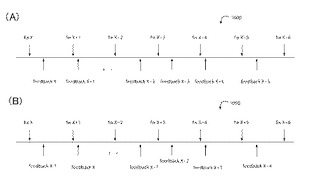
【図11】
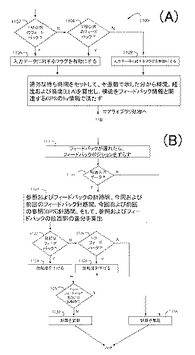
【図12】
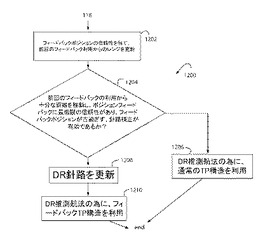
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2013−44534(P2013−44534A)
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願番号】特願2011−180174(P2011−180174)
【出願日】平成23年8月22日(2011.8.22)
【出願人】(000166247)古野電気株式会社 (441)
【出願人】(501396026)イーライド,インク. (10)
【氏名又は名称原語表記】eRide,Inc.
【住所又は居所原語表記】One Letterman Drive,Bldg.C,Suite 310 The Presidio of San Francisco San Francisco,CA USA
【Fターム(参考)】
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願日】平成23年8月22日(2011.8.22)
【出願人】(000166247)古野電気株式会社 (441)
【出願人】(501396026)イーライド,インク. (10)
【氏名又は名称原語表記】eRide,Inc.
【住所又は居所原語表記】One Letterman Drive,Bldg.C,Suite 310 The Presidio of San Francisco San Francisco,CA USA
【Fターム(参考)】
[ Back to top ]