
ローラコンベアレール及びローラコンベアレールにおけるキャリア搬送方法
【課題】 異なる高さ及び/又は異なる傾斜角度で敷設される2以上のローラコンベアレールを繋ぐ接続用ローラコンベアレールにおいて確実にキャリアを搬送する。
【解決手段】 ローラモジュール11bを水平位置に保持してキャリア5をコンベア12から搬送する。検出センサでキャリア5の進入完了を検出すると、ローラモジュール11bの駆動ローラを停止させてボールネジにより回転動作を作動させて傾斜状態まで回転させる。駆動ローラを駆動させ、傾斜状態で保持されるローラモジュール11aまでキャリア5を搬送させる。検出センサでキャリア5の進入完了を検出すると、ローラモジュール11aの駆動ローラを停止させてボールネジにより回転動作を作動させて水平状態まで回転させる。駆動ローラを駆動させ、コンベア10までキャリア5を搬送させる。
【解決手段】 ローラモジュール11bを水平位置に保持してキャリア5をコンベア12から搬送する。検出センサでキャリア5の進入完了を検出すると、ローラモジュール11bの駆動ローラを停止させてボールネジにより回転動作を作動させて傾斜状態まで回転させる。駆動ローラを駆動させ、傾斜状態で保持されるローラモジュール11aまでキャリア5を搬送させる。検出センサでキャリア5の進入完了を検出すると、ローラモジュール11aの駆動ローラを停止させてボールネジにより回転動作を作動させて水平状態まで回転させる。駆動ローラを駆動させ、コンベア10までキャリア5を搬送させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、キャリアを搬送するために工場内に複数敷設される複数のローラモジュールから構成されるローラコンベアレール及びローラコンベアレールにおけるキャリア搬送方法に関するものである。
【背景技術】
【0002】
半導や液晶表示装置を生産する工場では、クリーンルーム内に敷設された各種製造装置やストッカ等の設備間を結合するように、複数のローラモジュールから構成されるローラコンベアレールを複数敷設している。そして、製造過程の品物(例えば、半導体製品製造施設の場合、半導体基板や液晶表示装置用ガラス基板、フォトマスク用ガラス基板、光ディスク用基板等の処理対象物)をキャリアに収納して、設備間においてローラコンベアレールを介して搬送している。
【0003】
天井から吊り下げたローラコンベアレールを、工場内に敷設された設備間を結合して敷設し、キャリアをこれら設備間に輸送するローラコンベアシステムの先行技術として、例えば、特許文献1及び2がある。
【0004】
【特許文献1】特表2003−524544号公報
【特許文献2】特表2003−506289号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、近年、半導や液晶表示装置を生産する工場では、生産規模の拡大や、最新世代のデバイス対応の生産ラインへの更新等に対応するため、従前の工場建屋に新規工場を増設する必要が生じる場合がある。通常、新規工場は最新技術を取り入れて計画されるため、従前の技術を基礎に作られた従前の工場とは様々な点でミスマッチを生じる。例えば、工場の建屋の高さを新規工場と従前の工場とで一致させることが困難な場合が生じる。即ち、天井高さの異なる工場が連結され、これら両工場を貫通して基板等の収納されたキャリアをローラコンベアレールシステムにより輸送する場合が生じる。
【0006】
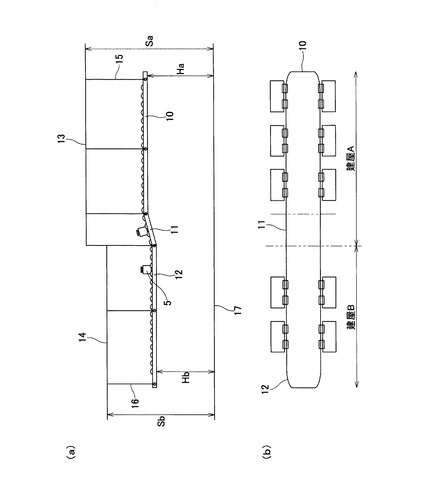
かかる場合における従来技術の具体例について、図9に基づいて説明する。図9は、従来技術における天井高さの異なる工場間に敷設される天井輸送式のローラコンベアレールの敷設例を示すものであり、(a)は側面図、(b)は上面図である。図9に示すように、建屋Aの床17からの天井13までの高さはSaであり、建屋Bの床17からの天井14までの高さはSbであり、両者にはSa>Sbの関係がある。ここに、建屋内スペースの有効活用、設置される設備上の都合などにより、建屋Aの天井13から吊り部材15により懸垂されて敷設されるコンベアレール10の高さHaと、建屋Bの天井14から吊り部材16により懸垂されて敷設されるコンベアレール12の高さHbとに違いが生じている。そして、このコンベアレール10とコンベアレール12間を結ぶ調整区間として、接続用のローラコンベアレールである傾斜コンベアレール11の設置が必須となっている。
【0007】
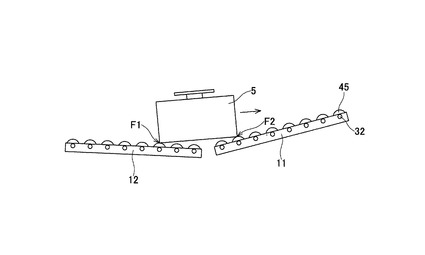
次に、この傾斜コンベアレール11上をキャリア輸送する場合の問題について、図10に基づいて説明する。図10は、従来技術における天井高さの異なる工場間に敷設される天井輸送式のローラコンベアレールの敷設例において、水平に敷設された建屋Bのコンベア12が傾斜コンベア11と接続される部位を示す側面図である。図10に示すように、キャリア5が建屋Bのコンベア12から傾斜コンベア11に矢印方向に輸送される場合、キャリア5の底面が各駆動ローラ45に一様に接触できず、図10中のF1とF2の2箇所においてのみ接触する状況が発生する。キャリア5と駆動ローラ45との接触が図10のような状態に陥ると、接触箇所が少ないために滑りが生じ、キャリアを正常に搬送することが困難になる。
【0008】
即ち、上述したキャリアをこれら設備間に輸送するローラコンベアシステムの先行技術である特許文献1及び2は、いずれも略水平に敷設されるローラコンベアレールが対象であり、同様の問題が生じる。
【0009】
そこで、本発明は、キャリアを搬送するために工場内に複数敷設される複数のローラモジュールから構成されるローラコンベアレールであって、異なる高さ及び/又は異なる傾斜角度で敷設される2以上のローラコンベアレールを繋ぐ接続用のローラコンベアレールにおいて、確実にキャリアを搬送することができるローラコンベアレール及びローラコンベアレールにおけるキャリア搬送方法を提供するものである。
【課題を解決するための手段及び効果】
【0010】
本発明に係るローラコンベアレールは、キャリアを搬送するために工場内に複数敷設される複数のローラモジュールから構成されるローラコンベアレールの内の、異なる高さ及び/又は異なる傾斜角度で敷設される2以上のローラコンベアレールを繋ぐ1又は2以上のローラモジュールから構成される接続用のローラコンベアレールであって、いずれか一方の側端部を回転中心として、他方の側端部を垂直方向に回転自在な回転手段を有することを特徴とする。
【0011】
これにより、回転手段により接続用のローラコンベアレールを垂直方向に回転させ、2以上のローラコンベアレールと接続用のローラコンベアレールの接続部位における高さ及び/又は傾斜角度を一致させることにより、キャリアとローラコンベアレールとを絶えず一様に当接させて滑りを発生させず、接続用のローラコンベアレールを用いて、異なる高さ及び/又は異なる傾斜角度で敷設される2以上のローラコンベアレールを繋いで、確実にキャリアを搬送することができる。
【0012】
ここで、本発明に係るローラコンベアレールは、前記キャリアの進行方向の入口側に位置する側端部が前記2以上のローラコンベアレールのいずれかと隣接するように同じ高さで配置され、前記キャリアの進行方向の入口側に位置する側端部を回転中心として前記キャリアの進行方向の出口側に位置する側端部を垂直方向に回転自在な回転手段を有する入口側ローラモジュールと、前記キャリアの進行方向の入口側に位置する側端部が前記入口側ローラモジュールと隣接するように配置されると共に前記キャリアの進行方向の出口側に位置する側端部が前記2以上のローラコンベアレールのいずれかと隣接するように同じ高さで配置され、前記キャリアの進行方向の出口側に位置する側端部を回転中心として前記キャリアの進行方向の入口側に位置する側端部を垂直方向に回転自在な回転手段を有する出口側ローラモジュールから構成される一対のローラモジュールから形成されて良い。
【0013】
これにより、入口側ローラモジュールがキャリアの進行方向の入口側に位置する側端部に隣接する2以上のローラコンベアレールのいずれかと同じ高さに配置され、出口側ローラモジュールがキャリアの進行方向の出口側に位置する側端部に隣接する2以上のローラコンベアレールのいずれかと同じ高さに配置されており、入口側ローラモジュールにキャリアが進入する際に、入口側ローラモジュールをキャリアが現在載置されているローラコンベアレールと同じ傾斜角度となる状態で保持し、入口側ローラモジュールへキャリアが進入完了した際に、入口側ローラモジュールと出口側ローラモジュールとをそれぞれに設けられた回転手段で同じ傾斜角度となる状態で接続し、キャリアを入口側ローラモジュールから出口側ローラモジュールに搬送し、出口側ローラモジュールへキャリアが進入完了した際に、出口側ローラモジュールを回転手段で搬送先のローラコンベアレールと同じ傾斜角度となる状態に回転させた後に、キャリアを搬送することにより、キャリアとローラコンベアレールとを絶えず一様に当接させて滑りを発生させず、入口側ローラモジュール及び出口側ローラモジュールの一対からなる接続用のローラコンベアレールを用いて、異なる高さ及び/又は異なる傾斜角度で敷設される2以上のローラコンベアレールを繋いで、確実にキャリアを搬送することができる。
【0014】
また、本発明に係るローラコンベアレールは、垂直方向に昇降可能な昇降手段を更に有して良い。
【0015】
これにより、例えば回転手段の回転中心が固定されている場合に、回転手段により接続用のローラコンベアレールを垂直方向に回転させて2以上のローラコンベアレールと接続用のローラコンベアレールの接続部位における傾斜角度を一致させるとともに、昇降手段により接続用のローラコンベアレールを垂直方向に回転させて2以上のローラコンベアレールと接続用のローラコンベアレールの接続部位における高さを一致させることにより、キャリアとローラコンベアレールとを絶えず一様に当接させて滑りを発生させず、接続用のローラコンベアレールを用いて、異なる高さ及び/又は異なる傾斜角度で敷設される2以上のローラコンベアレールを繋いで、確実にキャリアを搬送することができる。
【0016】
また、本発明に係るローラコンベアレールは、前記キャリアの進行方向の入口側に位置する側端部付近にキャリアの進入開始を検出するセンサと、前記キャリアの進行方向の出口側に位置する側端部付近にキャリアの進入完了を検出するセンサから構成される1対の検出センサを更に有して良い。
【0017】
これにより、キャリアの進行方向の入口側に位置する側端部付近にキャリアの進入開始を検出するセンサと、キャリアの進行方向の出口側に位置する側端部付近にキャリアの進入完了を検出するセンサから構成される1対の検出センサを用いて、検出センサによりキャリアの進入開始を検出した際に、回転手段(昇降手段を有する場合は回転手段及び昇降手段)で予め配置されたキャリアの進行方向の入口側に位置する側端部に隣接する2以上のローラコンベアレールのいずれか(キャリアが進入したのが出口側ローラモジュールである場合は入口側ローラモジュール)と同じ高さ及び/又は同じ傾斜角度となる状態を保持し、検出センサによりキャリアの進入完了を検出した際に、回転手段(昇降手段を有する場合は回転手段及び昇降手段)でキャリアの進行方向の出口側に位置する側端部に隣接する2以上のローラコンベアレールのいずれか(キャリアが進入したのが入口側ローラモジュールである場合は出口側ローラモジュール)と同じ高さ及び/又は同じ傾斜角度となる状態になるまで回転することにより、キャリアとローラコンベアレールとを絶えず一様に当接させて滑りを発生させず、接続用のローラコンベアレールを用いて、異なる高さ及び/又は異なる傾斜角度で敷設される2以上のローラコンベアレールを繋いで、より確実にキャリアを搬送することができる。
【0018】
また、本発明に係るローラコンベアレールは、前記検出センサが前記キャリアの進入完了を検出した際に前記キャリアの搬送を停止させて良い。
【0019】
これにより、検出センサが前記キャリアの進入完了を検出し、回転手段が回転動作を行っている間、または、昇降手段を有する場合は回転手段及び昇降手段が回転動作及び昇降動作を行っている間はキャリアの搬送を停止させ、回転手段の回転動作が終了した後、または、昇降手段を有する場合は回転手段及び昇降手段の回転動作及び昇降動作が終了した後に、キャリアの搬送を開始させることにより、キャリアとローラコンベアレールとを絶えず一様に当接させ、接続用のローラコンベアレールを用いて、異なる高さ及び/又は異なる傾斜角度で敷設される2以上のローラコンベアレールを繋いで、より安全且つ確実にキャリアを搬送することができる。
【0020】
また、本発明に係るローラコンベアレールは、水平面方向に回転自在なターンテーブル装置上に載置されて良い。
【0021】
これにより、ターンテーブル装置を用いてキャリアの進行方向に合わせてローラコンベアレールを回転することにより、接続用のローラコンベアレールを用いて、異なる高さ及び/又は異なる傾斜角度で、且つ異なる進行方向で敷設される2以上のローラコンベアレールを繋いで、確実にキャリアを搬送することができる。
【0022】
また、本発明に係るローラコンベアレールは、前記回転手段が、前記ローラコンベアレールの一端を回転中心として回転自在に形成すると共に他端にボールネジを固定することにより前記ローラコンベアを垂直方向に回転させるボールネジ方式、前記ローラコンベアレールの一端を回転中心として回転自在に形成すると共に他端にラック及びピニオンを固定するにより前記ローラコンベアレールを垂直方向に回転させるラックピニオン方式、前記ローラコンベアレールの一端を回転中心として回転自在に形成すると共に他端に伸縮可能な伸縮部材を固定することにより前記ローラコンベアレールを垂直方向に回転させるジャッキ方式、前記ローラコンベアレールの一端を回転中心として回転自在に形成すると共に、他端の下に楔状スライド部材を挿入及び退避することにより前記ローラコンベアレールを垂直方向に回転させる楔スライド方式のいずれかを用いて良い。
【0023】
これにより、ローラコンベアレールの一端を回転中心として回転自在に形成すると共に他端にボールネジを固定することによりローラコンベアを垂直方向に回転させるボールネジ方式、ローラコンベアレールの一端を回転中心として回転自在に形成すると共に他端にラック及びピニオンを固定するによりローラコンベアレールを垂直方向に回転させるラックピニオン方式、ローラコンベアレールの一端を回転中心として回転自在に形成すると共に他端に伸縮可能な伸縮部材を固定することによりローラコンベアレールを垂直方向に回転させるジャッキ方式、ローラコンベアレールの一端を回転中心として回転自在に形成すると共に、他端の下に楔状スライド部材を挿入及び退避することによりローラコンベアレールを垂直方向に回転させる楔スライド方式のいずれかを用いて、回転手段を実現することができる。
【0024】
そして、本発明に係るローラコンベアレールにおけるキャリア搬送方法は、キャリアを搬送するために工場内に複数敷設される複数のローラモジュールから構成されるローラコンベアレールの内の、異なる高さ及び/又は異なる傾斜角度で敷設される2以上のローラコンベアレールを繋ぐ接続用のローラコンベアレールにおけるキャリア搬送方法であって、前記接続用のローラコンベアレールの前記キャリアの進行方向の入口側に位置する側端部付近で前記キャリアの進入開始を検出した際に、予め配置された前記キャリアの進行方向の入口側に位置する側端部に隣接する前記2以上のローラコンベアレールのいずれかと同じ高さ及び/又は同じ傾斜角度となる状態を保持し、前記接続用のローラコンベアレールの前記キャリアの進行方向の出口側に位置する側端部付近で前記キャリアの進入完了を検出した際に、いずれか一方の側端部を回転中心として、他方の側端部を垂直方向に回転させて、前記キャリアの進行方向の出口側に位置する側端部に隣接する前記2以上のローラコンベアレールのいずれかと同じ高さ及び/又は同じ傾斜角度となる状態にし、前記キャリアの進行方向の入口側に位置する側端部に隣接する前記2以上のローラコンベアレールのいずれかから前記キャリアの進行方向の出口側に位置する側端部に隣接する前記2以上のローラコンベアレールのいずれかに対して前記キャリアを搬送することを特徴とする。
【0025】
これにより、接続用のローラコンベアレールを、キャリアの進行方向の入口側に位置する側端部に隣接するローラコンベアレールからのキャリアの進入開始を検出した際に、キャリアの進行方向の入口側に位置する側端部に隣接するローラコンベアレールと同じ高さ及び/又は同じ傾斜角度となる状態を保持し、キャリアの進入完了を検出した際に、キャリアの進行方向の出口側に位置する側端部に隣接するローラコンベアレールと同じ高さ及び/又は同じ傾斜角度となる状態になるまで回転して、キャリアの進行方向の出口側に位置する側端部に隣接するローラコンベアレールまでキャリアを搬送することにより、キャリアとローラコンベアレールとを絶えず一様に当接させて滑りを発生させず、接続用のローラコンベアレールを用いて、異なる高さ及び/又は異なる傾斜角度で敷設される2以上のローラコンベアレールを繋いで、確実にキャリアを搬送することができる。
【発明を実施するための最良の形態】
【0026】
以下、図面を参照しつつ、本発明に係るローラコンベアレール及びローラコンベアレールにおけるキャリア搬送方法を実施するための最良の形態について具体的な一例に即して説明する。
【0027】
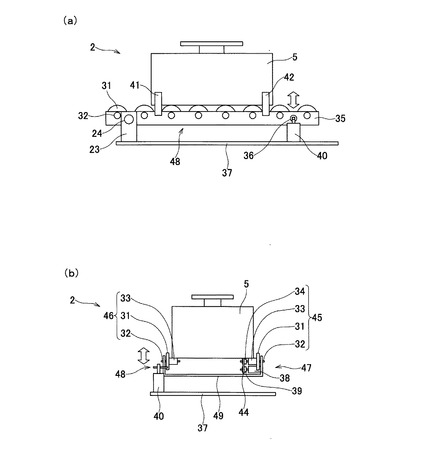
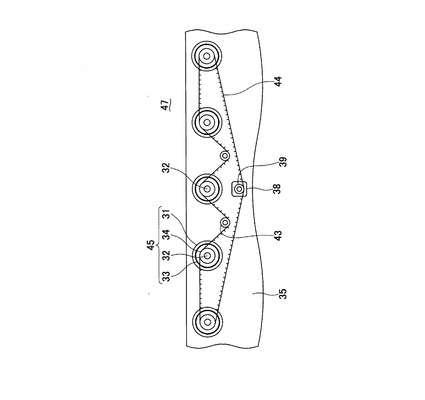
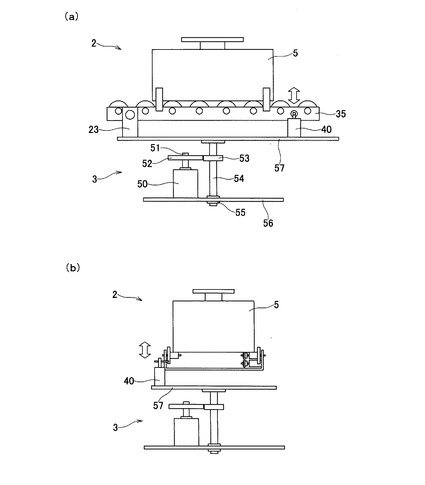
まず、本実施形態に係るローラコンベアレールを構成するローラモジュールを図2及び図3に基づいて以下に説明する。図2は、本実施形態に係るローラコンベアレールを構成するローラモジュールにキャリアが載置された状態を示す図であり、(a)は側面図であり、(b)は正面図である。図3は、本実施形態に係るローラコンベアレールを構成するローラモジュールを形成するローラ駆動機構を示す側面図である。
【0028】
図2(b)に示すように、キャリア5が載置されたローラモジュール2は、駆動ローラ45を備える駆動レール47と従動ローラ46を備える従動レール48とからなり、これらの駆動レール47及び従動レール48はコネクタ49により連結されている。
【0029】
駆動レール47のローラ駆動機構は、複数個(図3の例では5個)の駆動ローラ45を備えている。尚、駆動ローラ45は、図2の例では8個備えられており、その数は駆動レール47の長さなどに合わせて変更されてよい。この駆動ローラ45は、荷支持部33とツバ31が回転軸32に一体に挿入されているが一体成形加工により作成されてもよい。ここで、荷支持部33は、キャリア5の底面を支持し、後述する駆動プーリ34に伴い回転することによりキャリア5を搬送するものである。そのため、荷支持部33の表面は、キャリア5の搬送における振動等の衝撃を緩和し、高摩擦係数により滑り防止の役割を担うため、ウレタンゴム等で被覆される。また、ツバ31は、荷支持部33よりも大きい径で形成され、キャリア5の側面部に当接することにより、左右方向の位置を規制する。そして、5個の駆動ローラ45に挿入されている回転軸32は、等間隔配置でローラ支持フレーム35に回転自在に軸止めされる。また、5個の駆動ローラ45に挿入されている回転軸32の先端部には、それぞれ駆動プーリ(歯付プーリ)34が軸止めされている。5個の駆動プーリ34にはそれぞれタイミングベルト44が巻き掛けられており、同じくタイミングベルト44に巻き掛けられた歯付プーリ39の回転軸として取り付けられた噛み合い駆動モータ38が回転駆動することにより、駆動プーリ34が回転駆動される。尚、タイミングベルト44には、タイミングベルト44に張力を与えるために、タイミングベルト44の歯のない面に当接してテンションローラ43が設けられている。駆動レール47のローラ駆動機構は、以上の駆動プーリ34、歯付プーリ39、テンションローラ43をタイミングベルト44に係合してループを形成している。
【0030】
尚、複数個のローラモジュール2が直線上に並んでローラコンベアレール組み立てられる場合は、各ローラモジュール2の駆動レール47のローラ駆動機構において、駆動モータ38の回転速度を個々に制御し、各駆動モータ38の回転速度を同期させて一定速度で輸送することも可能であるし、各駆動モータ38の回転速度を非同期として輸送することも可能である。尚、この機能は、ローラモジュール2上のキャリア5の接触防止に有効な機能である。
【0031】
一方、従動レール48のローラ駆動機構は、上述した駆動レール47のローラ駆動機構から駆動に係る機能を除き、簡略化された構成をとる。即ち、図2に示すように、従動レール48のローラ駆動機構は、複数個の従動ローラ46を備えている。尚、従動ローラ46は、図2の例では8個備えられているが、その数は従動レール48の長さなどに合わせて変更されてよい。そして、この従動ローラ46は、荷支持部33とツバ31が回転軸32に一体に挿入されているが一体成形加工により作成されてもよい。ここで、荷支持部33は、キャリア5の底面を支持し、後述する駆動プーリ34に伴い回転することによりキャリア5を搬送するものである。そのため、荷支持部33の表面は、キャリア5の搬送における振動等の衝撃を緩和し、高摩擦係数により滑り防止の役割を担うため、ウレタンゴム等で被覆される。また、ツバ31は、荷支持部33よりも大きい径で形成され、キャリア5の側面部に当接することにより、左右方向の位置を規制する。そして、複数個の従動ローラ46に挿入されている回転軸32は、等間隔配置でローラ支持フレーム35に回転自在に軸止めされる。尚、従動レール48のローラ駆動機構は、駆動に係る機能を不要なため、駆動プーリ、歯付プーリ、テンションローラ、タイミングベルトが設けられていない。
【0032】
また、図2(a)、(b)に示すように、従動レール48のローラ支持フレーム35には、回転手段を構成するフレーム回転軸24及び回転軸支持部材23と、ボールネジ支持部材36及びボールネジ40とがその両端にそれぞれ形成される。ローラ支持フレーム35の一端は、フレーム回転軸24と回転軸支持部材23により、レールベース板37に固定される。駆動レール47のローラ支持フレーム35の他端は、ボールネジ支持部材36とボールネジ40により、レールベース板37に固定される。そして、フレーム回転軸24は回転自在で、減速モータと一体に構成されるボールネジ40の減速モータの正逆転により、図示の矢印方向にフレーム回転軸24を回転中心として、所定の角度範囲において回転する。尚、回転手段の構成は、これに限らない。例えば、従動レール48のローラ支持フレーム35の両端を、回転手段であるボールネジ支持部材36とボールネジ40により、レールベース板37に固定される構成にして、ローラ支持フレーム35の両端に設けられたボールネジ40の一端を回転中心として、他端を回転させて良い。また、回転手段は、従動レール48のローラ支持フレーム35に形成されているが、駆動レール47のローラ支持フレーム35に形成されていても良い。
【0033】
そして、図2に示すように、検出センサ41及び検出センサ42からなるキャリア検出手段は、従動レール48のローラ支持フレーム35の一方(図2では、従動レール48のローラ支持フレーム35)の側面に取り付けられる一対の反射型フォトセンサであり、それぞれ、キャリア5の進行方向の入口側の側端部付近及びキャリア5の進行方向の出口側の側端部付近にキャリア5の幅と略同一の距離を持って設置される。尚、検出センサ41及び検出センサ42は、駆動レール47のローラ支持フレーム35の側面に取り付けられても良い。検出センサ41及び検出センサ42は、対向する前面にキャリア5等の物体が存在すると、反射した反射光が物体に反射して戻る反射光を検出して、検出センサ41,42前面における物体の存在の有無を判別するものである。即ち、検出センサ41においては、キャリア5の進入開始を検出する。そして、検出センサ42においては、キャリア5のローラモジュール2上への進入完了を検出する。検出センサ42は、キャリア5のローラモジュール2上への進入完了を検出すると、図示しない制御装置を介して駆動ローラ45の駆動を停止させることによりキャリア5の搬送を停止させ、ローラモジュール2の回転が終了すると、図示しない制御装置を介して駆動ローラ45の駆動を開始させることによりキャリア5の搬送を再開することが好ましい。これにより、キャリア5の搬送の安全を確保することができる。尚、本実施形態においては、キャリア5がローラモジュール2上への進入完了時に、検出センサ41,42は共にキャリア5の検出状態となるが、それに限らず、検出センサ42のみがキャリア5の検出状態となり、検出センサ41の検出エリアからキャリア5が離れていても良い。
【0034】
尚、図2に示すレールベース板37の替わりに、ターンテーブル装置が備えられていても良い。ここで、ターンテーブル装置の詳細について、図4を用いて説明する。図4は、本実施形態に係るローラコンベアレールを構成するターンテーブル装置が備えられたローラモジュールにキャリアが載置された状態を示す図であり、(a)は側面図であり、(b)は正面図である。
【0035】
ターンテーブル機構3は、ベース板56上に回転軸54が軸受55を介して回転自在に軸止めされ、駆動モータ50も同様にベース板56上に固定される。そして、駆動モータ50の回転軸51にはギア52が軸止めされ、回転軸54に軸止めされたギア53と噛み合うようになっている。そして、回転軸54の上端はターンテーブル57を支持し、駆動モータ50の回転により、ターンテーブル57、即ちターンテーブル57上のローラモジュール2が回転するようになる。尚、ターンテーブル57より上の機構は、図2に示すローラモジュールと同じ構成であり、その説明を省略する。
【0036】
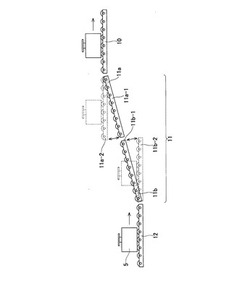
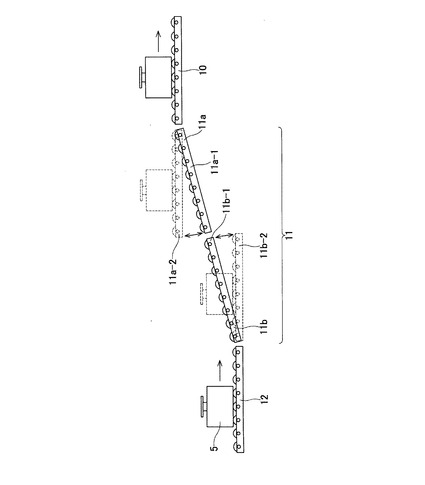
次に、上述したローラモジュール2を用いたローラコンベアレール(接続用のローラコンベアレール)11について図1に基づいて説明する。図1は、本実施形態に係るローラコンベアレールを示す側面図である。本実施形態においては、図1に示すように、コンベア(2以上のローラコンベアレール)12からコンベア(2以上のローラコンベアレール)10まで、傾斜コンベア(接続用のローラコンベアレール)11を介してキャリア5を搬送することを想定している。尚、コンベア10、12は、上述した図2に示すローラモジュール2から回転手段(フレーム回転軸24及び回転軸支持部材23と、ボールネジ支持部材36及びボールネジ40)及びキャリア検出手段(検出センサ41及び検出センサ42)を除いたものが複数組み合わされることにより形成される。
【0037】
図1に示すように、傾斜コンベア11は、2つのローラモジュール11a、11bから構成されている。尚、2つのローラモジュール11a、11bは、上述した図2に示すローラモジュール2の構成と同じである。ローラモジュール(入口側ローラモジュール)11bは、コンベア12に隣接する側端部がコンベア12と同じ高さとなり、コンベア12に隣接する側端部を回転中心として一方の側端部が回転自在となるように敷設されている。ローラモジュール(出口側ローラモジュール)11aは、コンベア10に隣接する側端部がコンベア10と同じ高さとなり、コンベア10に隣接する側端部を回転中心として一方の側端部が回転自在となるように敷設されている。そしてローラモジュール11a、11bは、それぞれ、水平な状態(図1に示す点線の位置)から互いに同じ傾斜角度となる状態(図1に示す実線の位置)の範囲において、減速モータと一体に構成されるボールネジ40の減速モータの正逆転により回転できるようになっている。尚、ローラモジュール11a、11bは、互いに同じ傾斜角度となる状態(図1に示す実線の位置)において、互いに接触しない程度の幅で設置されるのが好ましい。
【0038】
次に、上述したローラコンベアレールを用いたキャリア搬送方法について図1に基づいて説明する。即ち、ローラコンベアレール1では、コンベア12からコンベア10まで、次のステップにより、傾斜コンベア11を介してキャリア5が搬送される。
【0039】
[ステップ1]
キャリア5がコンベア12上を傾斜コンベア11方向に搬送される。この時、ローラモジュール11bは、点線で示す11b−2の水平位置に保持される。
【0040】
[ステップ2]
ローラモジュール11bに取り付けられた一対の検出センサ41,42でキャリア5がローラモジュール11b上への進入を完了したことを検出し、図示しない制御装置を介して駆動ローラ45の駆動を停止させる。
【0041】
[ステップ3]
ローラモジュール11bに設置された減速モータと一体に構成されるボールネジ40の減速モータの正逆転により、ローラモジュール11bの回転動作を作動させ、ローラモジュール11bを、点線で示す11b−2の水平状態から実線で示す11b−1の傾斜状態まで回転させる。
【0042】
[ステップ4]
図示しない制御装置を介してローラモジュール11bの駆動ローラ45を駆動させ、実線で示す11a−1の傾斜状態で保持されるローラモジュール11aまでキャリア5を搬送させる。
【0043】
[ステップ5]
ローラモジュール11aに取り付けられた一対の検出センサ41,42でキャリア5がローラモジュール11a上への進入を完了したことを検出し、図示しない制御装置を介して駆動ローラ45の駆動を停止させる。
【0044】
[ステップ6]
ローラモジュール11aに設置された減速モータと一体に構成されるボールネジ40の減速モータの正逆転により、ローラモジュール11aの回転動作を作動させ、ローラモジュール11aを、実線で示す11a−1の傾斜状態から点線で示す11a−2の水平状態まで回転させる。
【0045】
[ステップ7]
図示しない制御装置を介してローラモジュール11aの駆動ローラ45を駆動させ、コンベア10までキャリア5を搬送させる。
【0046】
以上に説明した搬送過程において、キャリア5の底面は絶えずコンベア10〜12の駆動ローラ45と一様に当接し、搬送不良を生じることはない。
【0047】
このように、本実施形態に係るローラコンベアレール及びコンベアレールを用いたキャリア搬送方法によると、キャリアとローラコンベアレールとを絶えず一様に当接させて滑りを発生させず、接続用のローラコンベアレールを用いて、異なる高さ及び/又は異なる傾斜角度で敷設される2以上のローラコンベアレールを繋いで、安全且つ確実にキャリアを搬送することができる。
【0048】
以上、本発明は、上記の好ましい実施形態に記載されているが、本発明はそれだけに制限されない。本発明の精神と範囲から逸脱することのない様々な実施形態が他になされる。さらに、本実施形態において、本発明の構成による作用および効果を述べているが、これら作用および効果は、一例であり、本発明を限定するものではない。また、具体例は、本発明の構成を例示したものであり、本発明を限定するものではない。
【0049】
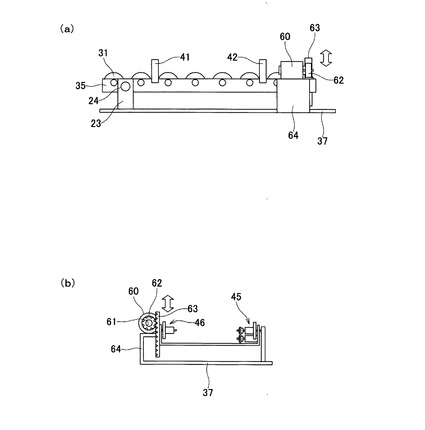
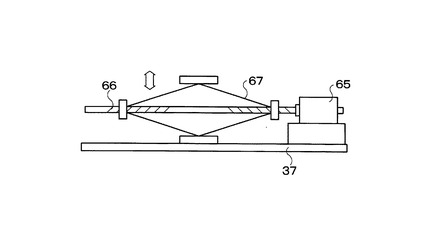
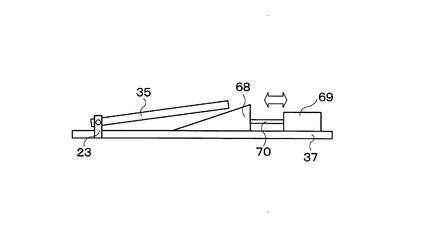
例えば、ローラモジュール2の回転手段は、上述の図2に示すボールネジ40で構成されるボールネジ方式を用いた回転手段に限らず、他の様々な方式を用いた回転手段を用いることができる。ボールネジ方式以外の方式を用いた回転手段について、図5〜7に基づいて説明する。図5は、ラックピニオン方式を用いた回転手段を有するローラモジュールを示す図であり、(a)は側面図であり、(b)は正面図である。図6は、ジャッキ方式を用いた回転手段を示す正面図である。図7は、楔スライド方式を用いた回転手段を有するローラモジュールを示す側面図である。
【0050】
まず、ラックピニオン方式を用いた回転手段について、図5に基づいて説明する。図5に示すように、ラックピニオン方式を用いた回転手段は、ラック63及びピニオン62とから構成される。ラック63はローラ支持フレーム35の側壁に固定される。ピニオン62はモータ支持部材64上に設置された駆動モータ60の回転軸61に軸止めされる。そして、駆動モータ60の正逆転により、ローラ支持フレーム35はフレーム回転軸24を中心として回転する。尚、ラック63及びピニオン62の歯形は、円弧動作に対応した噛み合い歯形形状としている。
【0051】
次に、ジャッキ方式を用いた回転手段について、図6に基づいて説明する。図6に示すように、ジャッキ方式を用いた回転手段は、伸縮部材67、ネジ66、モータ65により構成される。ネジ66は略中心点を境界に逆方向のネジが形成され、モータ65の正逆転により、伸縮部材67の高さが伸縮する。そして、図2におけるローラ支持フレーム35の下に、ボールネジ40を用いた回転手段に替えてジャッキ方式を用いた回転手段を設置することで、ローラ支持フレーム35を回転することができる。
【0052】
次に、楔スライド方式を用いた回転手段について、図7に基づいて説明する。図7に示すように、楔スライド方式を用いた回転手段は、楔スライド部材68、モータ69、ネジ部材70により構成される。モータ69の回転軸に軸止めされたネジ部材70を正逆転させることで、ネジ部材70の先端部に取り付けられた楔状スライド部材68をローラ支持フレーム35の下に侵入、退避させることにより、ローラ支持フレーム35を回転させることができる。
【0053】
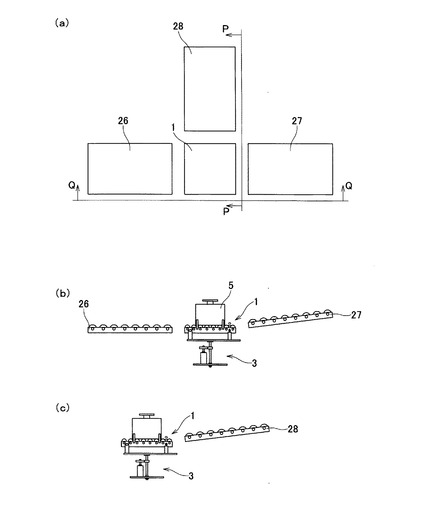
また、接続用のローラコンベアレールは、上述の図1の例に限らず、様々な場合に適用することができ、例えば、2又は3方向に分岐させる場合にも適用することができる。図8を用いて3方向に分岐されたローラコンベアレールに適用する場合について説明する。図8は、本実施形態に係るローラコンベアレールを3方向に分岐されたローラコンベアレールを接続するのに用いる場合について示す図であり、(a)は上面図であり、(b)はQ−Q断面矢視図であり、(c)はP−P断面矢視図である。
【0054】
図8では、水平ローラコンベアレール26から傾斜コンベアレール27または傾斜コンベアレール28に対して、接続用ローラコンベアレール1を介してキャリア5を搬送する場合を想定している。尚、図8に示す接続用ローラコンベアレール1は、図4に示すターンテーブル装置3を備えるローラモジュール2と同じ構成でありその説明を省略する。また、水平コンベアレール26及び傾斜コンベアレール27、28は、上述した図2に示すローラモジュール2から回転手段(フレーム回転軸24及び回転軸支持部材23と、ボールネジ支持部材36及びボールネジ40)及びキャリア検出手段(検出センサ41及び検出センサ42)を除いたものが複数組み合わされることにより形成される。
【0055】
水平コンベアレール26上を搬送されてきたキャリア5は、接続用ローラコンベアレール1上に進入を完了後、図示しない制御装置を介して接続用ローラコンベアレール1の駆動ローラ45の駆動を停止させる。次に、ターンテーブル装置3を回転させて、搬送方向を傾斜コンベアレール27または傾斜コンベアレール28に一致させる。そして、接続用ローラコンベアレール1に設置された減速モータと一体に構成されるボールネジ40の減速モータの正逆転により、接続用ローラコンベアレール1の傾斜角度を搬送方向の傾斜コンベアレール27または傾斜コンベアレール28に一致させるまで接続用ローラコンベアレール1の回転動作を作動させる。図示しない制御装置を介して接続用ローラコンベアレール1の駆動ローラ45を駆動させ、傾斜コンベアレール27または傾斜コンベアレール28までキャリア5を搬送させる。
【0056】
更に、本実施形態に係るローラモジュールは図2に示す構成に限らない。例えば、図2に示すローラモジュールにおいて、レールベース板37の下部にローラモジュール2自体を昇降可能にする昇降手段を備えても良い。昇降手段は、回転手段として上述したボールネジ方式やラックピニオン方式やジャッキ方式においてローラコンベアレールの一端に形成される回転中心として回転自在となる機構を除いた機構等を用いることができる。かかる場合、昇降手段を用いて接続するローラコンベアレールと接続用ローラコンベアレールの高さを一致させることが可能である。
【図面の簡単な説明】
【0057】
【図1】本実施形態に係るローラコンベアレールを示す側面図である。
【図2】本実施形態に係るローラコンベアレールを構成するローラモジュールにキャリアが載置された状態を示す図であり、(a)は側面図であり、(b)は正面図である。
【図3】本実施形態に係るローラコンベアレールを構成するローラモジュールを形成するローラ駆動機構を示す側面図である。
【図4】本実施形態に係るローラコンベアレールを構成するターンテーブル装置が備えられたローラモジュールにキャリアが載置された状態を示す図であり、(a)は側面図であり、(b)は正面図である。
【図5】ラックピニオン方式を用いた回転手段を有するローラモジュールを示す図であり、(a)は側面図であり、(b)は正面図である。
【図6】ジャッキ方式を用いた回転手段を示す正面図である。
【図7】楔スライド方式を用いた回転手段を有するローラモジュールを示す側面図である。
【図8】本実施形態に係るローラコンベアレールを3方向に分岐されたローラコンベアレールを接続するのに用いる場合について示す図であり、(a)は上面図であり、(b)はQ−Q断面矢視図であり、(c)はP−P断面矢視図である。
【図9】従来技術における天井高さの異なる工場間に敷設される天井輸送式のローラコンベアレールの敷設例を示すものであり、(a)は側面図、(b)は上面図である。
【図10】従来技術における天井高さの異なる工場間に敷設される天井輸送式のローラコンベアレールの敷設例において、水平に敷設された建屋のコンベアが傾斜コンベアと接続される部位を示す側面図である。
【符号の説明】
【0058】
1 ローラコンベアレール
2 ローラモジュール
3 ターンテーブル機構
5 キャリア
10 コンベア(2以上のローラコンベアレール)
11 傾斜コンベア(接続用のローラコンベアレール)
11a ローラモジュール(入口側ローラモジュール)
11b ローラモジュール(出口側ローラモジュール)
12 コンベア(2以上のローラコンベアレール)
23 回転軸支持部材(回転手段)
24 フレーム回転軸(回転手段)
26 水平ローラコンベアレール(2以上のローラコンベアレール)
27 傾斜コンベアレール(2以上のローラコンベアレール)
28 傾斜コンベアレール(2以上のローラコンベアレール)
36 ボールネジ支持部材(回転手段)
40 ボールネジ(回転手段)
41 検出センサ(キャリア検出手段)
42 検出センサ(キャリア検出手段)
【技術分野】
【0001】
本発明は、キャリアを搬送するために工場内に複数敷設される複数のローラモジュールから構成されるローラコンベアレール及びローラコンベアレールにおけるキャリア搬送方法に関するものである。
【背景技術】
【0002】
半導や液晶表示装置を生産する工場では、クリーンルーム内に敷設された各種製造装置やストッカ等の設備間を結合するように、複数のローラモジュールから構成されるローラコンベアレールを複数敷設している。そして、製造過程の品物(例えば、半導体製品製造施設の場合、半導体基板や液晶表示装置用ガラス基板、フォトマスク用ガラス基板、光ディスク用基板等の処理対象物)をキャリアに収納して、設備間においてローラコンベアレールを介して搬送している。
【0003】
天井から吊り下げたローラコンベアレールを、工場内に敷設された設備間を結合して敷設し、キャリアをこれら設備間に輸送するローラコンベアシステムの先行技術として、例えば、特許文献1及び2がある。
【0004】
【特許文献1】特表2003−524544号公報
【特許文献2】特表2003−506289号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、近年、半導や液晶表示装置を生産する工場では、生産規模の拡大や、最新世代のデバイス対応の生産ラインへの更新等に対応するため、従前の工場建屋に新規工場を増設する必要が生じる場合がある。通常、新規工場は最新技術を取り入れて計画されるため、従前の技術を基礎に作られた従前の工場とは様々な点でミスマッチを生じる。例えば、工場の建屋の高さを新規工場と従前の工場とで一致させることが困難な場合が生じる。即ち、天井高さの異なる工場が連結され、これら両工場を貫通して基板等の収納されたキャリアをローラコンベアレールシステムにより輸送する場合が生じる。
【0006】
かかる場合における従来技術の具体例について、図9に基づいて説明する。図9は、従来技術における天井高さの異なる工場間に敷設される天井輸送式のローラコンベアレールの敷設例を示すものであり、(a)は側面図、(b)は上面図である。図9に示すように、建屋Aの床17からの天井13までの高さはSaであり、建屋Bの床17からの天井14までの高さはSbであり、両者にはSa>Sbの関係がある。ここに、建屋内スペースの有効活用、設置される設備上の都合などにより、建屋Aの天井13から吊り部材15により懸垂されて敷設されるコンベアレール10の高さHaと、建屋Bの天井14から吊り部材16により懸垂されて敷設されるコンベアレール12の高さHbとに違いが生じている。そして、このコンベアレール10とコンベアレール12間を結ぶ調整区間として、接続用のローラコンベアレールである傾斜コンベアレール11の設置が必須となっている。
【0007】
次に、この傾斜コンベアレール11上をキャリア輸送する場合の問題について、図10に基づいて説明する。図10は、従来技術における天井高さの異なる工場間に敷設される天井輸送式のローラコンベアレールの敷設例において、水平に敷設された建屋Bのコンベア12が傾斜コンベア11と接続される部位を示す側面図である。図10に示すように、キャリア5が建屋Bのコンベア12から傾斜コンベア11に矢印方向に輸送される場合、キャリア5の底面が各駆動ローラ45に一様に接触できず、図10中のF1とF2の2箇所においてのみ接触する状況が発生する。キャリア5と駆動ローラ45との接触が図10のような状態に陥ると、接触箇所が少ないために滑りが生じ、キャリアを正常に搬送することが困難になる。
【0008】
即ち、上述したキャリアをこれら設備間に輸送するローラコンベアシステムの先行技術である特許文献1及び2は、いずれも略水平に敷設されるローラコンベアレールが対象であり、同様の問題が生じる。
【0009】
そこで、本発明は、キャリアを搬送するために工場内に複数敷設される複数のローラモジュールから構成されるローラコンベアレールであって、異なる高さ及び/又は異なる傾斜角度で敷設される2以上のローラコンベアレールを繋ぐ接続用のローラコンベアレールにおいて、確実にキャリアを搬送することができるローラコンベアレール及びローラコンベアレールにおけるキャリア搬送方法を提供するものである。
【課題を解決するための手段及び効果】
【0010】
本発明に係るローラコンベアレールは、キャリアを搬送するために工場内に複数敷設される複数のローラモジュールから構成されるローラコンベアレールの内の、異なる高さ及び/又は異なる傾斜角度で敷設される2以上のローラコンベアレールを繋ぐ1又は2以上のローラモジュールから構成される接続用のローラコンベアレールであって、いずれか一方の側端部を回転中心として、他方の側端部を垂直方向に回転自在な回転手段を有することを特徴とする。
【0011】
これにより、回転手段により接続用のローラコンベアレールを垂直方向に回転させ、2以上のローラコンベアレールと接続用のローラコンベアレールの接続部位における高さ及び/又は傾斜角度を一致させることにより、キャリアとローラコンベアレールとを絶えず一様に当接させて滑りを発生させず、接続用のローラコンベアレールを用いて、異なる高さ及び/又は異なる傾斜角度で敷設される2以上のローラコンベアレールを繋いで、確実にキャリアを搬送することができる。
【0012】
ここで、本発明に係るローラコンベアレールは、前記キャリアの進行方向の入口側に位置する側端部が前記2以上のローラコンベアレールのいずれかと隣接するように同じ高さで配置され、前記キャリアの進行方向の入口側に位置する側端部を回転中心として前記キャリアの進行方向の出口側に位置する側端部を垂直方向に回転自在な回転手段を有する入口側ローラモジュールと、前記キャリアの進行方向の入口側に位置する側端部が前記入口側ローラモジュールと隣接するように配置されると共に前記キャリアの進行方向の出口側に位置する側端部が前記2以上のローラコンベアレールのいずれかと隣接するように同じ高さで配置され、前記キャリアの進行方向の出口側に位置する側端部を回転中心として前記キャリアの進行方向の入口側に位置する側端部を垂直方向に回転自在な回転手段を有する出口側ローラモジュールから構成される一対のローラモジュールから形成されて良い。
【0013】
これにより、入口側ローラモジュールがキャリアの進行方向の入口側に位置する側端部に隣接する2以上のローラコンベアレールのいずれかと同じ高さに配置され、出口側ローラモジュールがキャリアの進行方向の出口側に位置する側端部に隣接する2以上のローラコンベアレールのいずれかと同じ高さに配置されており、入口側ローラモジュールにキャリアが進入する際に、入口側ローラモジュールをキャリアが現在載置されているローラコンベアレールと同じ傾斜角度となる状態で保持し、入口側ローラモジュールへキャリアが進入完了した際に、入口側ローラモジュールと出口側ローラモジュールとをそれぞれに設けられた回転手段で同じ傾斜角度となる状態で接続し、キャリアを入口側ローラモジュールから出口側ローラモジュールに搬送し、出口側ローラモジュールへキャリアが進入完了した際に、出口側ローラモジュールを回転手段で搬送先のローラコンベアレールと同じ傾斜角度となる状態に回転させた後に、キャリアを搬送することにより、キャリアとローラコンベアレールとを絶えず一様に当接させて滑りを発生させず、入口側ローラモジュール及び出口側ローラモジュールの一対からなる接続用のローラコンベアレールを用いて、異なる高さ及び/又は異なる傾斜角度で敷設される2以上のローラコンベアレールを繋いで、確実にキャリアを搬送することができる。
【0014】
また、本発明に係るローラコンベアレールは、垂直方向に昇降可能な昇降手段を更に有して良い。
【0015】
これにより、例えば回転手段の回転中心が固定されている場合に、回転手段により接続用のローラコンベアレールを垂直方向に回転させて2以上のローラコンベアレールと接続用のローラコンベアレールの接続部位における傾斜角度を一致させるとともに、昇降手段により接続用のローラコンベアレールを垂直方向に回転させて2以上のローラコンベアレールと接続用のローラコンベアレールの接続部位における高さを一致させることにより、キャリアとローラコンベアレールとを絶えず一様に当接させて滑りを発生させず、接続用のローラコンベアレールを用いて、異なる高さ及び/又は異なる傾斜角度で敷設される2以上のローラコンベアレールを繋いで、確実にキャリアを搬送することができる。
【0016】
また、本発明に係るローラコンベアレールは、前記キャリアの進行方向の入口側に位置する側端部付近にキャリアの進入開始を検出するセンサと、前記キャリアの進行方向の出口側に位置する側端部付近にキャリアの進入完了を検出するセンサから構成される1対の検出センサを更に有して良い。
【0017】
これにより、キャリアの進行方向の入口側に位置する側端部付近にキャリアの進入開始を検出するセンサと、キャリアの進行方向の出口側に位置する側端部付近にキャリアの進入完了を検出するセンサから構成される1対の検出センサを用いて、検出センサによりキャリアの進入開始を検出した際に、回転手段(昇降手段を有する場合は回転手段及び昇降手段)で予め配置されたキャリアの進行方向の入口側に位置する側端部に隣接する2以上のローラコンベアレールのいずれか(キャリアが進入したのが出口側ローラモジュールである場合は入口側ローラモジュール)と同じ高さ及び/又は同じ傾斜角度となる状態を保持し、検出センサによりキャリアの進入完了を検出した際に、回転手段(昇降手段を有する場合は回転手段及び昇降手段)でキャリアの進行方向の出口側に位置する側端部に隣接する2以上のローラコンベアレールのいずれか(キャリアが進入したのが入口側ローラモジュールである場合は出口側ローラモジュール)と同じ高さ及び/又は同じ傾斜角度となる状態になるまで回転することにより、キャリアとローラコンベアレールとを絶えず一様に当接させて滑りを発生させず、接続用のローラコンベアレールを用いて、異なる高さ及び/又は異なる傾斜角度で敷設される2以上のローラコンベアレールを繋いで、より確実にキャリアを搬送することができる。
【0018】
また、本発明に係るローラコンベアレールは、前記検出センサが前記キャリアの進入完了を検出した際に前記キャリアの搬送を停止させて良い。
【0019】
これにより、検出センサが前記キャリアの進入完了を検出し、回転手段が回転動作を行っている間、または、昇降手段を有する場合は回転手段及び昇降手段が回転動作及び昇降動作を行っている間はキャリアの搬送を停止させ、回転手段の回転動作が終了した後、または、昇降手段を有する場合は回転手段及び昇降手段の回転動作及び昇降動作が終了した後に、キャリアの搬送を開始させることにより、キャリアとローラコンベアレールとを絶えず一様に当接させ、接続用のローラコンベアレールを用いて、異なる高さ及び/又は異なる傾斜角度で敷設される2以上のローラコンベアレールを繋いで、より安全且つ確実にキャリアを搬送することができる。
【0020】
また、本発明に係るローラコンベアレールは、水平面方向に回転自在なターンテーブル装置上に載置されて良い。
【0021】
これにより、ターンテーブル装置を用いてキャリアの進行方向に合わせてローラコンベアレールを回転することにより、接続用のローラコンベアレールを用いて、異なる高さ及び/又は異なる傾斜角度で、且つ異なる進行方向で敷設される2以上のローラコンベアレールを繋いで、確実にキャリアを搬送することができる。
【0022】
また、本発明に係るローラコンベアレールは、前記回転手段が、前記ローラコンベアレールの一端を回転中心として回転自在に形成すると共に他端にボールネジを固定することにより前記ローラコンベアを垂直方向に回転させるボールネジ方式、前記ローラコンベアレールの一端を回転中心として回転自在に形成すると共に他端にラック及びピニオンを固定するにより前記ローラコンベアレールを垂直方向に回転させるラックピニオン方式、前記ローラコンベアレールの一端を回転中心として回転自在に形成すると共に他端に伸縮可能な伸縮部材を固定することにより前記ローラコンベアレールを垂直方向に回転させるジャッキ方式、前記ローラコンベアレールの一端を回転中心として回転自在に形成すると共に、他端の下に楔状スライド部材を挿入及び退避することにより前記ローラコンベアレールを垂直方向に回転させる楔スライド方式のいずれかを用いて良い。
【0023】
これにより、ローラコンベアレールの一端を回転中心として回転自在に形成すると共に他端にボールネジを固定することによりローラコンベアを垂直方向に回転させるボールネジ方式、ローラコンベアレールの一端を回転中心として回転自在に形成すると共に他端にラック及びピニオンを固定するによりローラコンベアレールを垂直方向に回転させるラックピニオン方式、ローラコンベアレールの一端を回転中心として回転自在に形成すると共に他端に伸縮可能な伸縮部材を固定することによりローラコンベアレールを垂直方向に回転させるジャッキ方式、ローラコンベアレールの一端を回転中心として回転自在に形成すると共に、他端の下に楔状スライド部材を挿入及び退避することによりローラコンベアレールを垂直方向に回転させる楔スライド方式のいずれかを用いて、回転手段を実現することができる。
【0024】
そして、本発明に係るローラコンベアレールにおけるキャリア搬送方法は、キャリアを搬送するために工場内に複数敷設される複数のローラモジュールから構成されるローラコンベアレールの内の、異なる高さ及び/又は異なる傾斜角度で敷設される2以上のローラコンベアレールを繋ぐ接続用のローラコンベアレールにおけるキャリア搬送方法であって、前記接続用のローラコンベアレールの前記キャリアの進行方向の入口側に位置する側端部付近で前記キャリアの進入開始を検出した際に、予め配置された前記キャリアの進行方向の入口側に位置する側端部に隣接する前記2以上のローラコンベアレールのいずれかと同じ高さ及び/又は同じ傾斜角度となる状態を保持し、前記接続用のローラコンベアレールの前記キャリアの進行方向の出口側に位置する側端部付近で前記キャリアの進入完了を検出した際に、いずれか一方の側端部を回転中心として、他方の側端部を垂直方向に回転させて、前記キャリアの進行方向の出口側に位置する側端部に隣接する前記2以上のローラコンベアレールのいずれかと同じ高さ及び/又は同じ傾斜角度となる状態にし、前記キャリアの進行方向の入口側に位置する側端部に隣接する前記2以上のローラコンベアレールのいずれかから前記キャリアの進行方向の出口側に位置する側端部に隣接する前記2以上のローラコンベアレールのいずれかに対して前記キャリアを搬送することを特徴とする。
【0025】
これにより、接続用のローラコンベアレールを、キャリアの進行方向の入口側に位置する側端部に隣接するローラコンベアレールからのキャリアの進入開始を検出した際に、キャリアの進行方向の入口側に位置する側端部に隣接するローラコンベアレールと同じ高さ及び/又は同じ傾斜角度となる状態を保持し、キャリアの進入完了を検出した際に、キャリアの進行方向の出口側に位置する側端部に隣接するローラコンベアレールと同じ高さ及び/又は同じ傾斜角度となる状態になるまで回転して、キャリアの進行方向の出口側に位置する側端部に隣接するローラコンベアレールまでキャリアを搬送することにより、キャリアとローラコンベアレールとを絶えず一様に当接させて滑りを発生させず、接続用のローラコンベアレールを用いて、異なる高さ及び/又は異なる傾斜角度で敷設される2以上のローラコンベアレールを繋いで、確実にキャリアを搬送することができる。
【発明を実施するための最良の形態】
【0026】
以下、図面を参照しつつ、本発明に係るローラコンベアレール及びローラコンベアレールにおけるキャリア搬送方法を実施するための最良の形態について具体的な一例に即して説明する。
【0027】
まず、本実施形態に係るローラコンベアレールを構成するローラモジュールを図2及び図3に基づいて以下に説明する。図2は、本実施形態に係るローラコンベアレールを構成するローラモジュールにキャリアが載置された状態を示す図であり、(a)は側面図であり、(b)は正面図である。図3は、本実施形態に係るローラコンベアレールを構成するローラモジュールを形成するローラ駆動機構を示す側面図である。
【0028】
図2(b)に示すように、キャリア5が載置されたローラモジュール2は、駆動ローラ45を備える駆動レール47と従動ローラ46を備える従動レール48とからなり、これらの駆動レール47及び従動レール48はコネクタ49により連結されている。
【0029】
駆動レール47のローラ駆動機構は、複数個(図3の例では5個)の駆動ローラ45を備えている。尚、駆動ローラ45は、図2の例では8個備えられており、その数は駆動レール47の長さなどに合わせて変更されてよい。この駆動ローラ45は、荷支持部33とツバ31が回転軸32に一体に挿入されているが一体成形加工により作成されてもよい。ここで、荷支持部33は、キャリア5の底面を支持し、後述する駆動プーリ34に伴い回転することによりキャリア5を搬送するものである。そのため、荷支持部33の表面は、キャリア5の搬送における振動等の衝撃を緩和し、高摩擦係数により滑り防止の役割を担うため、ウレタンゴム等で被覆される。また、ツバ31は、荷支持部33よりも大きい径で形成され、キャリア5の側面部に当接することにより、左右方向の位置を規制する。そして、5個の駆動ローラ45に挿入されている回転軸32は、等間隔配置でローラ支持フレーム35に回転自在に軸止めされる。また、5個の駆動ローラ45に挿入されている回転軸32の先端部には、それぞれ駆動プーリ(歯付プーリ)34が軸止めされている。5個の駆動プーリ34にはそれぞれタイミングベルト44が巻き掛けられており、同じくタイミングベルト44に巻き掛けられた歯付プーリ39の回転軸として取り付けられた噛み合い駆動モータ38が回転駆動することにより、駆動プーリ34が回転駆動される。尚、タイミングベルト44には、タイミングベルト44に張力を与えるために、タイミングベルト44の歯のない面に当接してテンションローラ43が設けられている。駆動レール47のローラ駆動機構は、以上の駆動プーリ34、歯付プーリ39、テンションローラ43をタイミングベルト44に係合してループを形成している。
【0030】
尚、複数個のローラモジュール2が直線上に並んでローラコンベアレール組み立てられる場合は、各ローラモジュール2の駆動レール47のローラ駆動機構において、駆動モータ38の回転速度を個々に制御し、各駆動モータ38の回転速度を同期させて一定速度で輸送することも可能であるし、各駆動モータ38の回転速度を非同期として輸送することも可能である。尚、この機能は、ローラモジュール2上のキャリア5の接触防止に有効な機能である。
【0031】
一方、従動レール48のローラ駆動機構は、上述した駆動レール47のローラ駆動機構から駆動に係る機能を除き、簡略化された構成をとる。即ち、図2に示すように、従動レール48のローラ駆動機構は、複数個の従動ローラ46を備えている。尚、従動ローラ46は、図2の例では8個備えられているが、その数は従動レール48の長さなどに合わせて変更されてよい。そして、この従動ローラ46は、荷支持部33とツバ31が回転軸32に一体に挿入されているが一体成形加工により作成されてもよい。ここで、荷支持部33は、キャリア5の底面を支持し、後述する駆動プーリ34に伴い回転することによりキャリア5を搬送するものである。そのため、荷支持部33の表面は、キャリア5の搬送における振動等の衝撃を緩和し、高摩擦係数により滑り防止の役割を担うため、ウレタンゴム等で被覆される。また、ツバ31は、荷支持部33よりも大きい径で形成され、キャリア5の側面部に当接することにより、左右方向の位置を規制する。そして、複数個の従動ローラ46に挿入されている回転軸32は、等間隔配置でローラ支持フレーム35に回転自在に軸止めされる。尚、従動レール48のローラ駆動機構は、駆動に係る機能を不要なため、駆動プーリ、歯付プーリ、テンションローラ、タイミングベルトが設けられていない。
【0032】
また、図2(a)、(b)に示すように、従動レール48のローラ支持フレーム35には、回転手段を構成するフレーム回転軸24及び回転軸支持部材23と、ボールネジ支持部材36及びボールネジ40とがその両端にそれぞれ形成される。ローラ支持フレーム35の一端は、フレーム回転軸24と回転軸支持部材23により、レールベース板37に固定される。駆動レール47のローラ支持フレーム35の他端は、ボールネジ支持部材36とボールネジ40により、レールベース板37に固定される。そして、フレーム回転軸24は回転自在で、減速モータと一体に構成されるボールネジ40の減速モータの正逆転により、図示の矢印方向にフレーム回転軸24を回転中心として、所定の角度範囲において回転する。尚、回転手段の構成は、これに限らない。例えば、従動レール48のローラ支持フレーム35の両端を、回転手段であるボールネジ支持部材36とボールネジ40により、レールベース板37に固定される構成にして、ローラ支持フレーム35の両端に設けられたボールネジ40の一端を回転中心として、他端を回転させて良い。また、回転手段は、従動レール48のローラ支持フレーム35に形成されているが、駆動レール47のローラ支持フレーム35に形成されていても良い。
【0033】
そして、図2に示すように、検出センサ41及び検出センサ42からなるキャリア検出手段は、従動レール48のローラ支持フレーム35の一方(図2では、従動レール48のローラ支持フレーム35)の側面に取り付けられる一対の反射型フォトセンサであり、それぞれ、キャリア5の進行方向の入口側の側端部付近及びキャリア5の進行方向の出口側の側端部付近にキャリア5の幅と略同一の距離を持って設置される。尚、検出センサ41及び検出センサ42は、駆動レール47のローラ支持フレーム35の側面に取り付けられても良い。検出センサ41及び検出センサ42は、対向する前面にキャリア5等の物体が存在すると、反射した反射光が物体に反射して戻る反射光を検出して、検出センサ41,42前面における物体の存在の有無を判別するものである。即ち、検出センサ41においては、キャリア5の進入開始を検出する。そして、検出センサ42においては、キャリア5のローラモジュール2上への進入完了を検出する。検出センサ42は、キャリア5のローラモジュール2上への進入完了を検出すると、図示しない制御装置を介して駆動ローラ45の駆動を停止させることによりキャリア5の搬送を停止させ、ローラモジュール2の回転が終了すると、図示しない制御装置を介して駆動ローラ45の駆動を開始させることによりキャリア5の搬送を再開することが好ましい。これにより、キャリア5の搬送の安全を確保することができる。尚、本実施形態においては、キャリア5がローラモジュール2上への進入完了時に、検出センサ41,42は共にキャリア5の検出状態となるが、それに限らず、検出センサ42のみがキャリア5の検出状態となり、検出センサ41の検出エリアからキャリア5が離れていても良い。
【0034】
尚、図2に示すレールベース板37の替わりに、ターンテーブル装置が備えられていても良い。ここで、ターンテーブル装置の詳細について、図4を用いて説明する。図4は、本実施形態に係るローラコンベアレールを構成するターンテーブル装置が備えられたローラモジュールにキャリアが載置された状態を示す図であり、(a)は側面図であり、(b)は正面図である。
【0035】
ターンテーブル機構3は、ベース板56上に回転軸54が軸受55を介して回転自在に軸止めされ、駆動モータ50も同様にベース板56上に固定される。そして、駆動モータ50の回転軸51にはギア52が軸止めされ、回転軸54に軸止めされたギア53と噛み合うようになっている。そして、回転軸54の上端はターンテーブル57を支持し、駆動モータ50の回転により、ターンテーブル57、即ちターンテーブル57上のローラモジュール2が回転するようになる。尚、ターンテーブル57より上の機構は、図2に示すローラモジュールと同じ構成であり、その説明を省略する。
【0036】
次に、上述したローラモジュール2を用いたローラコンベアレール(接続用のローラコンベアレール)11について図1に基づいて説明する。図1は、本実施形態に係るローラコンベアレールを示す側面図である。本実施形態においては、図1に示すように、コンベア(2以上のローラコンベアレール)12からコンベア(2以上のローラコンベアレール)10まで、傾斜コンベア(接続用のローラコンベアレール)11を介してキャリア5を搬送することを想定している。尚、コンベア10、12は、上述した図2に示すローラモジュール2から回転手段(フレーム回転軸24及び回転軸支持部材23と、ボールネジ支持部材36及びボールネジ40)及びキャリア検出手段(検出センサ41及び検出センサ42)を除いたものが複数組み合わされることにより形成される。
【0037】
図1に示すように、傾斜コンベア11は、2つのローラモジュール11a、11bから構成されている。尚、2つのローラモジュール11a、11bは、上述した図2に示すローラモジュール2の構成と同じである。ローラモジュール(入口側ローラモジュール)11bは、コンベア12に隣接する側端部がコンベア12と同じ高さとなり、コンベア12に隣接する側端部を回転中心として一方の側端部が回転自在となるように敷設されている。ローラモジュール(出口側ローラモジュール)11aは、コンベア10に隣接する側端部がコンベア10と同じ高さとなり、コンベア10に隣接する側端部を回転中心として一方の側端部が回転自在となるように敷設されている。そしてローラモジュール11a、11bは、それぞれ、水平な状態(図1に示す点線の位置)から互いに同じ傾斜角度となる状態(図1に示す実線の位置)の範囲において、減速モータと一体に構成されるボールネジ40の減速モータの正逆転により回転できるようになっている。尚、ローラモジュール11a、11bは、互いに同じ傾斜角度となる状態(図1に示す実線の位置)において、互いに接触しない程度の幅で設置されるのが好ましい。
【0038】
次に、上述したローラコンベアレールを用いたキャリア搬送方法について図1に基づいて説明する。即ち、ローラコンベアレール1では、コンベア12からコンベア10まで、次のステップにより、傾斜コンベア11を介してキャリア5が搬送される。
【0039】
[ステップ1]
キャリア5がコンベア12上を傾斜コンベア11方向に搬送される。この時、ローラモジュール11bは、点線で示す11b−2の水平位置に保持される。
【0040】
[ステップ2]
ローラモジュール11bに取り付けられた一対の検出センサ41,42でキャリア5がローラモジュール11b上への進入を完了したことを検出し、図示しない制御装置を介して駆動ローラ45の駆動を停止させる。
【0041】
[ステップ3]
ローラモジュール11bに設置された減速モータと一体に構成されるボールネジ40の減速モータの正逆転により、ローラモジュール11bの回転動作を作動させ、ローラモジュール11bを、点線で示す11b−2の水平状態から実線で示す11b−1の傾斜状態まで回転させる。
【0042】
[ステップ4]
図示しない制御装置を介してローラモジュール11bの駆動ローラ45を駆動させ、実線で示す11a−1の傾斜状態で保持されるローラモジュール11aまでキャリア5を搬送させる。
【0043】
[ステップ5]
ローラモジュール11aに取り付けられた一対の検出センサ41,42でキャリア5がローラモジュール11a上への進入を完了したことを検出し、図示しない制御装置を介して駆動ローラ45の駆動を停止させる。
【0044】
[ステップ6]
ローラモジュール11aに設置された減速モータと一体に構成されるボールネジ40の減速モータの正逆転により、ローラモジュール11aの回転動作を作動させ、ローラモジュール11aを、実線で示す11a−1の傾斜状態から点線で示す11a−2の水平状態まで回転させる。
【0045】
[ステップ7]
図示しない制御装置を介してローラモジュール11aの駆動ローラ45を駆動させ、コンベア10までキャリア5を搬送させる。
【0046】
以上に説明した搬送過程において、キャリア5の底面は絶えずコンベア10〜12の駆動ローラ45と一様に当接し、搬送不良を生じることはない。
【0047】
このように、本実施形態に係るローラコンベアレール及びコンベアレールを用いたキャリア搬送方法によると、キャリアとローラコンベアレールとを絶えず一様に当接させて滑りを発生させず、接続用のローラコンベアレールを用いて、異なる高さ及び/又は異なる傾斜角度で敷設される2以上のローラコンベアレールを繋いで、安全且つ確実にキャリアを搬送することができる。
【0048】
以上、本発明は、上記の好ましい実施形態に記載されているが、本発明はそれだけに制限されない。本発明の精神と範囲から逸脱することのない様々な実施形態が他になされる。さらに、本実施形態において、本発明の構成による作用および効果を述べているが、これら作用および効果は、一例であり、本発明を限定するものではない。また、具体例は、本発明の構成を例示したものであり、本発明を限定するものではない。
【0049】
例えば、ローラモジュール2の回転手段は、上述の図2に示すボールネジ40で構成されるボールネジ方式を用いた回転手段に限らず、他の様々な方式を用いた回転手段を用いることができる。ボールネジ方式以外の方式を用いた回転手段について、図5〜7に基づいて説明する。図5は、ラックピニオン方式を用いた回転手段を有するローラモジュールを示す図であり、(a)は側面図であり、(b)は正面図である。図6は、ジャッキ方式を用いた回転手段を示す正面図である。図7は、楔スライド方式を用いた回転手段を有するローラモジュールを示す側面図である。
【0050】
まず、ラックピニオン方式を用いた回転手段について、図5に基づいて説明する。図5に示すように、ラックピニオン方式を用いた回転手段は、ラック63及びピニオン62とから構成される。ラック63はローラ支持フレーム35の側壁に固定される。ピニオン62はモータ支持部材64上に設置された駆動モータ60の回転軸61に軸止めされる。そして、駆動モータ60の正逆転により、ローラ支持フレーム35はフレーム回転軸24を中心として回転する。尚、ラック63及びピニオン62の歯形は、円弧動作に対応した噛み合い歯形形状としている。
【0051】
次に、ジャッキ方式を用いた回転手段について、図6に基づいて説明する。図6に示すように、ジャッキ方式を用いた回転手段は、伸縮部材67、ネジ66、モータ65により構成される。ネジ66は略中心点を境界に逆方向のネジが形成され、モータ65の正逆転により、伸縮部材67の高さが伸縮する。そして、図2におけるローラ支持フレーム35の下に、ボールネジ40を用いた回転手段に替えてジャッキ方式を用いた回転手段を設置することで、ローラ支持フレーム35を回転することができる。
【0052】
次に、楔スライド方式を用いた回転手段について、図7に基づいて説明する。図7に示すように、楔スライド方式を用いた回転手段は、楔スライド部材68、モータ69、ネジ部材70により構成される。モータ69の回転軸に軸止めされたネジ部材70を正逆転させることで、ネジ部材70の先端部に取り付けられた楔状スライド部材68をローラ支持フレーム35の下に侵入、退避させることにより、ローラ支持フレーム35を回転させることができる。
【0053】
また、接続用のローラコンベアレールは、上述の図1の例に限らず、様々な場合に適用することができ、例えば、2又は3方向に分岐させる場合にも適用することができる。図8を用いて3方向に分岐されたローラコンベアレールに適用する場合について説明する。図8は、本実施形態に係るローラコンベアレールを3方向に分岐されたローラコンベアレールを接続するのに用いる場合について示す図であり、(a)は上面図であり、(b)はQ−Q断面矢視図であり、(c)はP−P断面矢視図である。
【0054】
図8では、水平ローラコンベアレール26から傾斜コンベアレール27または傾斜コンベアレール28に対して、接続用ローラコンベアレール1を介してキャリア5を搬送する場合を想定している。尚、図8に示す接続用ローラコンベアレール1は、図4に示すターンテーブル装置3を備えるローラモジュール2と同じ構成でありその説明を省略する。また、水平コンベアレール26及び傾斜コンベアレール27、28は、上述した図2に示すローラモジュール2から回転手段(フレーム回転軸24及び回転軸支持部材23と、ボールネジ支持部材36及びボールネジ40)及びキャリア検出手段(検出センサ41及び検出センサ42)を除いたものが複数組み合わされることにより形成される。
【0055】
水平コンベアレール26上を搬送されてきたキャリア5は、接続用ローラコンベアレール1上に進入を完了後、図示しない制御装置を介して接続用ローラコンベアレール1の駆動ローラ45の駆動を停止させる。次に、ターンテーブル装置3を回転させて、搬送方向を傾斜コンベアレール27または傾斜コンベアレール28に一致させる。そして、接続用ローラコンベアレール1に設置された減速モータと一体に構成されるボールネジ40の減速モータの正逆転により、接続用ローラコンベアレール1の傾斜角度を搬送方向の傾斜コンベアレール27または傾斜コンベアレール28に一致させるまで接続用ローラコンベアレール1の回転動作を作動させる。図示しない制御装置を介して接続用ローラコンベアレール1の駆動ローラ45を駆動させ、傾斜コンベアレール27または傾斜コンベアレール28までキャリア5を搬送させる。
【0056】
更に、本実施形態に係るローラモジュールは図2に示す構成に限らない。例えば、図2に示すローラモジュールにおいて、レールベース板37の下部にローラモジュール2自体を昇降可能にする昇降手段を備えても良い。昇降手段は、回転手段として上述したボールネジ方式やラックピニオン方式やジャッキ方式においてローラコンベアレールの一端に形成される回転中心として回転自在となる機構を除いた機構等を用いることができる。かかる場合、昇降手段を用いて接続するローラコンベアレールと接続用ローラコンベアレールの高さを一致させることが可能である。
【図面の簡単な説明】
【0057】
【図1】本実施形態に係るローラコンベアレールを示す側面図である。
【図2】本実施形態に係るローラコンベアレールを構成するローラモジュールにキャリアが載置された状態を示す図であり、(a)は側面図であり、(b)は正面図である。
【図3】本実施形態に係るローラコンベアレールを構成するローラモジュールを形成するローラ駆動機構を示す側面図である。
【図4】本実施形態に係るローラコンベアレールを構成するターンテーブル装置が備えられたローラモジュールにキャリアが載置された状態を示す図であり、(a)は側面図であり、(b)は正面図である。
【図5】ラックピニオン方式を用いた回転手段を有するローラモジュールを示す図であり、(a)は側面図であり、(b)は正面図である。
【図6】ジャッキ方式を用いた回転手段を示す正面図である。
【図7】楔スライド方式を用いた回転手段を有するローラモジュールを示す側面図である。
【図8】本実施形態に係るローラコンベアレールを3方向に分岐されたローラコンベアレールを接続するのに用いる場合について示す図であり、(a)は上面図であり、(b)はQ−Q断面矢視図であり、(c)はP−P断面矢視図である。
【図9】従来技術における天井高さの異なる工場間に敷設される天井輸送式のローラコンベアレールの敷設例を示すものであり、(a)は側面図、(b)は上面図である。
【図10】従来技術における天井高さの異なる工場間に敷設される天井輸送式のローラコンベアレールの敷設例において、水平に敷設された建屋のコンベアが傾斜コンベアと接続される部位を示す側面図である。
【符号の説明】
【0058】
1 ローラコンベアレール
2 ローラモジュール
3 ターンテーブル機構
5 キャリア
10 コンベア(2以上のローラコンベアレール)
11 傾斜コンベア(接続用のローラコンベアレール)
11a ローラモジュール(入口側ローラモジュール)
11b ローラモジュール(出口側ローラモジュール)
12 コンベア(2以上のローラコンベアレール)
23 回転軸支持部材(回転手段)
24 フレーム回転軸(回転手段)
26 水平ローラコンベアレール(2以上のローラコンベアレール)
27 傾斜コンベアレール(2以上のローラコンベアレール)
28 傾斜コンベアレール(2以上のローラコンベアレール)
36 ボールネジ支持部材(回転手段)
40 ボールネジ(回転手段)
41 検出センサ(キャリア検出手段)
42 検出センサ(キャリア検出手段)
【特許請求の範囲】
【請求項1】
キャリアを搬送するために工場内に複数敷設される複数のローラモジュールから構成されるローラコンベアレールの内の、異なる高さ及び/又は異なる傾斜角度で敷設される2以上のローラコンベアレールを繋ぐ1又は2以上のローラモジュールから構成される接続用のローラコンベアレールであって、
いずれか一方の側端部を回転中心として、他方の側端部を垂直方向に回転自在な回転手段を有することを特徴とするローラコンベアレール。
【請求項2】
前記ローラコンベアレールは、前記キャリアの進行方向の入口側に位置する側端部が前記2以上のローラコンベアレールのいずれかと隣接するように同じ高さで配置され、前記キャリアの進行方向の入口側に位置する側端部を回転中心として前記キャリアの進行方向の出口側に位置する側端部を垂直方向に回転自在な回転手段を有する入口側ローラモジュールと、前記キャリアの進行方向の入口側に位置する側端部が前記入口側ローラモジュールと隣接するように配置されると共に前記キャリアの進行方向の出口側に位置する側端部が前記2以上のローラコンベアレールのいずれかと隣接するように同じ高さで配置され、前記キャリアの進行方向の出口側に位置する側端部を回転中心として前記キャリアの進行方向の入口側に位置する側端部を垂直方向に回転自在な回転手段を有する出口側ローラモジュールから構成される一対のローラモジュールから形成されることを特徴とする請求項1に記載のローラコンベアレール。
【請求項3】
前記ローラコンベアレールは、垂直方向に昇降可能な昇降手段を更に有することを特徴とする請求項1に記載のローラコンベアレール。
【請求項4】
前記ローラコンベアレールは、前記キャリアの進行方向の入口側に位置する側端部付近にキャリアの進入開始を検出するセンサと、前記キャリアの進行方向の出口側に位置する側端部付近にキャリアの進入完了を検出するセンサから構成される1対の検出センサを更に有することを特徴とする請求項1〜3のいずれか一項に記載のローラコンベアレール。
【請求項5】
前記検出センサが前記キャリアの進入完了を検出した際に前記キャリアの搬送を停止させることを特徴とする請求項4に記載のローラコンベアレール。
【請求項6】
前記ローラコンベアレールは、水平面方向に回転自在なターンテーブル装置上に載置されることを特徴とする請求項1〜5のいずれか一項に記載のローラコンベアレール。
【請求項7】
前記回転手段は、前記ローラコンベアレールの一端を回転中心として回転自在に形成すると共に他端にボールネジを固定することにより前記ローラコンベアを垂直方向に回転させるボールネジ方式、前記ローラコンベアレールの一端を回転中心として回転自在に形成すると共に他端にラック及びピニオンを固定するにより前記ローラコンベアレールを垂直方向に回転させるラックピニオン方式、前記ローラコンベアレールの一端を回転中心として回転自在に形成すると共に他端に伸縮可能な伸縮部材を固定することにより前記ローラコンベアレールを垂直方向に回転させるジャッキ方式、前記ローラコンベアレールの一端を回転中心として回転自在に形成すると共に、他端の下に楔状スライド部材を挿入及び退避することにより前記ローラコンベアレールを垂直方向に回転させる楔スライド方式のいずれかを用いることを特徴とする請求項1〜6のいずれか一項に記載のローラコンベアレール。
【請求項8】
キャリアを搬送するために工場内に複数敷設される複数のローラモジュールから構成されるローラコンベアレールの内の、異なる高さ及び/又は異なる傾斜角度で敷設される2以上のローラコンベアレールを繋ぐ接続用のローラコンベアレールにおけるキャリア搬送方法であって、
前記接続用のローラコンベアレールの前記キャリアの進行方向の入口側に位置する側端部付近で前記キャリアの進入開始を検出した際に、予め配置された前記キャリアの進行方向の入口側に位置する側端部に隣接する前記2以上のローラコンベアレールのいずれかと同じ高さ及び/又は同じ傾斜角度となる状態を保持し、
前記接続用のローラコンベアレールの前記キャリアの進行方向の出口側に位置する側端部付近で前記キャリアの進入完了を検出した際に、いずれか一方の側端部を回転中心として、他方の側端部を垂直方向に回転させて、前記キャリアの進行方向の出口側に位置する側端部に隣接する前記2以上のローラコンベアレールのいずれかと同じ高さ及び/又は同じ傾斜角度となる状態にし、
前記キャリアの進行方向の入口側に位置する側端部に隣接する前記2以上のローラコンベアレールのいずれかから前記キャリアの進行方向の出口側に位置する側端部に隣接する前記2以上のローラコンベアレールのいずれかに対して前記キャリアを搬送することを特徴とするローラコンベアレールにおけるキャリア搬送方法。
【請求項1】
キャリアを搬送するために工場内に複数敷設される複数のローラモジュールから構成されるローラコンベアレールの内の、異なる高さ及び/又は異なる傾斜角度で敷設される2以上のローラコンベアレールを繋ぐ1又は2以上のローラモジュールから構成される接続用のローラコンベアレールであって、
いずれか一方の側端部を回転中心として、他方の側端部を垂直方向に回転自在な回転手段を有することを特徴とするローラコンベアレール。
【請求項2】
前記ローラコンベアレールは、前記キャリアの進行方向の入口側に位置する側端部が前記2以上のローラコンベアレールのいずれかと隣接するように同じ高さで配置され、前記キャリアの進行方向の入口側に位置する側端部を回転中心として前記キャリアの進行方向の出口側に位置する側端部を垂直方向に回転自在な回転手段を有する入口側ローラモジュールと、前記キャリアの進行方向の入口側に位置する側端部が前記入口側ローラモジュールと隣接するように配置されると共に前記キャリアの進行方向の出口側に位置する側端部が前記2以上のローラコンベアレールのいずれかと隣接するように同じ高さで配置され、前記キャリアの進行方向の出口側に位置する側端部を回転中心として前記キャリアの進行方向の入口側に位置する側端部を垂直方向に回転自在な回転手段を有する出口側ローラモジュールから構成される一対のローラモジュールから形成されることを特徴とする請求項1に記載のローラコンベアレール。
【請求項3】
前記ローラコンベアレールは、垂直方向に昇降可能な昇降手段を更に有することを特徴とする請求項1に記載のローラコンベアレール。
【請求項4】
前記ローラコンベアレールは、前記キャリアの進行方向の入口側に位置する側端部付近にキャリアの進入開始を検出するセンサと、前記キャリアの進行方向の出口側に位置する側端部付近にキャリアの進入完了を検出するセンサから構成される1対の検出センサを更に有することを特徴とする請求項1〜3のいずれか一項に記載のローラコンベアレール。
【請求項5】
前記検出センサが前記キャリアの進入完了を検出した際に前記キャリアの搬送を停止させることを特徴とする請求項4に記載のローラコンベアレール。
【請求項6】
前記ローラコンベアレールは、水平面方向に回転自在なターンテーブル装置上に載置されることを特徴とする請求項1〜5のいずれか一項に記載のローラコンベアレール。
【請求項7】
前記回転手段は、前記ローラコンベアレールの一端を回転中心として回転自在に形成すると共に他端にボールネジを固定することにより前記ローラコンベアを垂直方向に回転させるボールネジ方式、前記ローラコンベアレールの一端を回転中心として回転自在に形成すると共に他端にラック及びピニオンを固定するにより前記ローラコンベアレールを垂直方向に回転させるラックピニオン方式、前記ローラコンベアレールの一端を回転中心として回転自在に形成すると共に他端に伸縮可能な伸縮部材を固定することにより前記ローラコンベアレールを垂直方向に回転させるジャッキ方式、前記ローラコンベアレールの一端を回転中心として回転自在に形成すると共に、他端の下に楔状スライド部材を挿入及び退避することにより前記ローラコンベアレールを垂直方向に回転させる楔スライド方式のいずれかを用いることを特徴とする請求項1〜6のいずれか一項に記載のローラコンベアレール。
【請求項8】
キャリアを搬送するために工場内に複数敷設される複数のローラモジュールから構成されるローラコンベアレールの内の、異なる高さ及び/又は異なる傾斜角度で敷設される2以上のローラコンベアレールを繋ぐ接続用のローラコンベアレールにおけるキャリア搬送方法であって、
前記接続用のローラコンベアレールの前記キャリアの進行方向の入口側に位置する側端部付近で前記キャリアの進入開始を検出した際に、予め配置された前記キャリアの進行方向の入口側に位置する側端部に隣接する前記2以上のローラコンベアレールのいずれかと同じ高さ及び/又は同じ傾斜角度となる状態を保持し、
前記接続用のローラコンベアレールの前記キャリアの進行方向の出口側に位置する側端部付近で前記キャリアの進入完了を検出した際に、いずれか一方の側端部を回転中心として、他方の側端部を垂直方向に回転させて、前記キャリアの進行方向の出口側に位置する側端部に隣接する前記2以上のローラコンベアレールのいずれかと同じ高さ及び/又は同じ傾斜角度となる状態にし、
前記キャリアの進行方向の入口側に位置する側端部に隣接する前記2以上のローラコンベアレールのいずれかから前記キャリアの進行方向の出口側に位置する側端部に隣接する前記2以上のローラコンベアレールのいずれかに対して前記キャリアを搬送することを特徴とするローラコンベアレールにおけるキャリア搬送方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2007−8593(P2007−8593A)
【公開日】平成19年1月18日(2007.1.18)
【国際特許分類】
【出願番号】特願2005−187614(P2005−187614)
【出願日】平成17年6月28日(2005.6.28)
【出願人】(302059274)アシスト シンコー株式会社 (146)
【Fターム(参考)】
【公開日】平成19年1月18日(2007.1.18)
【国際特許分類】
【出願日】平成17年6月28日(2005.6.28)
【出願人】(302059274)アシスト シンコー株式会社 (146)
【Fターム(参考)】
[ Back to top ]